Embed Size (px)
Citation preview

Mobile radio propagation prediction in irregular cellular topographies using ray methods
M.J. Neve G.B.Rowe
Indexing terms: Mobile radio propugution, Irregular cellular topogmphies
Abstract: The performance of a UTD-based technique for cellular mobile radio propagation modelling is investigated in situations of irregular topography and nonuniform building heights. The comparison between theorctical simulation (with limited topographic and ground cover data) and experimental measurements at 851 MHz is encouraging. The UTD-based technique is seen to exhibit a flexibility which is unlikely to be replicated by alternative physical optics based techniques.
1 Introduction
Cellular system planners require radiowave propaga- tion models that give good prediction accuracy and yet are also efficient to implement. These requirements have recently prompted an interest in using determinis- tic electromagnetic techniques for cellular system plan- ning. Some attention has been directed at using physical optics methods [l, 21, but recently Neve and Rowe [3, 41 have published a ray-based UTD formula- tion which is capable of modelling mobile radio path loss in the urban core of a city. Relevant bounds of applicability for this formulation were determined by comparison with existing physical optics formulations [I, 21 and good prediction accuracy was achieved within these bounds. However, in view of the physical environments typically encountered in cellular plan- ning, the flat terrain and uniform building heightispac- ing considered in [3] must be regarded as somewhat simplistic.
In a subsequent paper [5] the performance of an improved UTD-based formulation was compared with experimental measurements at 465, 851 and 927MHz. A more realistic geometry was used in which height variability was permitted in the building row closest to the mobile receiver. The predictions obtained were found to portray accurately the lognormal behaviour and excess loss (clutter) factors measured experimen- tally, but consistently to underestimate path loss varia- bility. To accurately estimate path loss variability it was postulated that nonlocal topographic features and
0 IEE, 1995 IEE Proceedings online no. 19952252 Paper first received 15th November 1994 The authors are with the Department of Electrical and Electronic Engi- neering, University of Auckland, Private Bag 92019, Auckland, New Zea- land
street intersections must be included in the model. One of the principal advantages of a UTD-based
approach is that it is able to model terrain irregularity more efficiently than physical optics based approaches can. Accordingly, this paper reports an investigation into the performance of a UTD-based formulation in situations of irregular terrain and non-uniform building heights. Predictions are compared with experimental results measured in the central business district of Auckland, New Zealand.
2 Propagation environment
A typical urban cellular environment is illustrated in Fig. 1. In such environments the base station is usually elevated to some extent above the nominal building height. In contrast, the mobile is usually immersed in a cluttered environment and is rarely visible to the base station. Typical base-to-mobile ranges may be up to several kilometres, with the intervening environment consisting of rows of buildings located along parallel intervening streets.
base station
Fig. 1 A conceptual urbun propagation environment
Although the scenario of Fig. 1 is broadly typical of many cellular geometries, it does possess certain disad- vantages with regard to modelling. Most significant of these is the highly complex nature of the environment that the forward propagating fields must encounter. A complete characterisation of such a geometry to a reso- lution of less than a wavelength at the frequencies of interest would thus be an immense computational task well beyond current processing capabilities. Fortu- nately, however, such a detailed description is seldom (if ever) required. Since system planners are interested in assessing the likelihood of achieving adequate system performance (or conversely the ‘outage probability’), a
441 IEE Proc.-Microw. Antennas Propug.. Vol. 142, No. 6, December 1995

stochastic characterisation of the propagation process is inevitably the most appropriate. For example, nar- rowband analogue cellular channels (as considered in this paper) are frequently characterised by a Rayleigh distributed fading envelope superimposed on a lognor- mally varying local mean. In this case, the outage prob- ability expression derived from the cumulative distribution of the combined variation is dependent on only two parameters: the area mean and local mean variability. Knowledge of these planning parameters (which are environment-dependent) is sufficient to assess the likelihood of achieving adequate system per- formance for a given mobile locality. A deterministic technique capable of predicting these parameters on the basis of a quantitative description of the physical envi- ronment would thus be of immense benefit to the sys- tem planner. Although only narrowband propagation is considered in this paper, this approach is neverthe- less applicable to wideband propagation as well (in which, for example, delay spread is an important plan- ning parameter).
Therefore, it is necessary to represent the geometry of Fig. 1 in such a way that the principal scattering mech- anisms dominating the propagation can be isolated in a systematic fashion. To do this, the complex geometry of Fig. 1 is simplified by representing it by one of three different models which shall henceforth be referred to as phases I, I1 and 111. These phases (representing dif- ferent stages in our model development) were formu- lated to facilitate separate consideration of the key physical parameters such as path length, antenna heights, building heights and terrain irregularity. In general, the three phases (1-111) are characterised by increasing model complexity.
bose station
\ iobile station
(receiver)
Fig.2 Environmental model - Phase I
In the first stage of the model development (phase I), we wished to investigate the effect of path length and base station antenna height on path loss, as well as investigating the alternative electromagnetic formula- tions previously reported in the literature. These twin requirements prompted the investigation of the simpli- fied geometry in Fig. 2 as reported in [3, 41. In this geometry, the propagation environment is modelled by an array of uniform height, perfectly conducting knife edgeslscreens which are uniformly spaced. Energy propagates from the base station to the mobile via mul- tiple diffraction over these multiple screens, and is dif- fracted down to street level by the last screen. All screens are assumed transversally uniform in height.
Subsequent to this study, a second geometry (phase IT) was considered to investigate the influence of build- ing height variation close to the mobile on path loss
448
variability [SI. As illustrated in Fig. 3, the building row closest to the mobile is modelled by an irregular-height screen formed from the intersection of a succession of finite length edges. Although not representing the true three-dimensional nature of the buildings, the irregular height screen can be regarded as a logical extension to the simple, uniform height screen of the phase I model.
base station
Fig.3 Environmental model - Phase II
The formulation reported in [5] was found to accu- rately portray the lognormal behaviour and excess loss (clutter) factors measured experimentally, but to con- sistently underestimate path loss variability. To accu- rately estimate path loss variability it was hypothesised that height variations in the screen array along the entire propagation path must be included. Therefore, to test this hypothesis a third geometry (phase 111) has been considered, as shown in Fig. 4. This geometry
basestation if
Fig.4 Environmental model - Phase III
was developed to investigate the influence of variability of topography and building height (ground cover) along the propagation path. (In contrast, the phase TI scenario (Fig. 3) only considered building height varia- tion in the region immediately adjacent to the mobile.) In this development, all screens are considered to be transversally uniform in height, as in the phase I model. However, the height of the individual screens vary according to the instantaneous path profile along the ray trajectory from the base station. Therefore, the height of the screens represents not only the height of the buildings but also terrain irregularities along the propagation path. It is the results of this analysis which form the basis of this paper. As in [3, 51 the primary propagation mechanism from base to mobile comprises multiple diffraction over several rows of screens fol- lowed by a final diffraction down to the mobile receiver at street level. In contrast to [3, 51, this paper addresses the problem of predicting multiple diffraction
IEE Proc -Microw Antennas Propag , Vol 142, No 6, December 1995

loss over a series of screens of irregular height.
3 Propagation model
In the phase I11 model (Fig. 4) the geometry is charac- terised by a number of screens of varying height, intended to represent the effects of terrain and ground cover along the propagation path between the base and mobile stations. The removal of transverse screen irreg- ularity is significant in that it permits the propagation to be characterised in two-dimensions. The resulting geometry is illustrated in Fig. 5 , and shows the physi- cal parameters of relevance to phase 111.
Fig. 5 Phase III model Two-dimensional geometry.
Electromagnetically, the geometry of Fig. 5 will mul- tiply-diffract the fields propagating from the base sta- tion to mobile station. In many cases some of the screens in a given array will provide negligible pertur- bation to the propagating fields, and as such may be omitted from the analysis. In general, therefore, it is necessary to determine which ray components contrib- ute appreciably to the total field at the mobile station. A recursive search algorithm has been developed by the authors to identify the principal ray paths that contrib- ute appreciably to the received signal [6]. Essentially, this algorithm eliminates those paths which interact with edges that do not significantly perturb the forward propagating fields.
As input, this algorithm requires the indices of the two edges a and b (b > a) between which the ray-set is to be calculated. Also required is the excess path length 6 which is defined as the excess length over the line-of- sight distance with which Fresnel ellipsoid perturbation occurs. Initially, the algorithm is invoked with a = 1 and b = N . The algorithm itself can be expressed in pseudocode as follows: 1. IF b - a = 1 then the ray-set is just a direct ray from screen a to b. This step ultimately terminates the recursive algorithm.
ELSE b - a > 1, i.e. there are intervening screens between screen a and b
(a) Initialise a boolean variable pathobsc to false to indicate that the ray path from screen a to b is not obscured.
(b) Identify the screen that protrudes above the line- of-sight path between screens a and b the most. If such a screen exists then set y to the index of that screen and pathobsc to true.
(c) IF pathobsc is true (i.e. the line-of-sight path between screens a and b is obscured by screen y)
(i) The ray-set of all paths from screen a to b comprises all combinations of paths from screen a to y with paths from screen y to b (i.e. the recursive algo- rithm is reinvoked twice to find these, and the results concatenated to give all possible combinations).
ELSE if pathobsc is false, no screen obscures the path, a direct ray exists, and all intervening screens have to be examined to see if they perturb the Fresnel
IEE Proc -Mccrow Antennas Propag , Vol 142, No 6, December 1995
ellipsoid. If an intervening screen y is found to perturb the ellipsoid, the ray-set from screen a to b additionally comprises all combinations of paths from screen a to y with paths from screen y to b (i.e. the recursive algo- rithm is reinvoked twice to find these, and the results concatenated to give all possible combinations). 2. Purge duplicated paths from the ray-set.
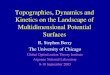
To illustrate the use of the algorithm, a typical phase I11 scenario is illustrated in Fig. 6. The terrain profile and screens representing the buildings along the propa- gation path are shown together with the key rays and the Fresnel ellipsoids (specified by a path length differ- ence in this example of 6 = U 8 to illustrate the tech- nique) about these paths. In this example, the total field at the receiver is comprised of the four rays indi- cated in Fig. 6. The contribution of each ray to the total field can be calculated using standard UTD tech- niques [7, 81.
1 -9+12+1& 1 -9-10-17-1L
I I
1OOOm
Fig. 6 Example Phase 111 scenario
The algorithm described in this section requires as input the heights and horizontal locations of the screen array representing the path profile of the phase I l l geometry. In relation to Fig. 6, this data represents two physical effects, namely ground cover (i.e. building structures) and terrain profile along the propagation path. A first-order estimate of the building heights can be made from personal inspection. However, the ter- rain profile can have a major effect upon the observed path loss and is somewhat more difficult to determine. Usually, detailed topographical information is required which may or may not be available to the system plan- ner (inevitably at some substantial cost.) It is neverthe- less possible to obtain a first-order estimate of the terrain profile from contour maps of the intended oper- ating environment. A straightforward method for extracting such estimates that has been implemented by the author is described in Section 5.
4 Experimental measurements
To verify the predictions, experimental results from a set of field trials measured on a streetwise basis at 851MHz by Rowe and Williamson [9] were used. In these trials the transmitting antenna was situated on the roof of Reid House in Wobson Street, Auckland at a height of 25.5m above the local terrain level. In all mobile locations the receiving antenna was located 1.6m above the street level. Measurements of the path loss were made in a large number of streets in the sur- rounding urban area within the central business district of Auckland for which the topography can be consid-
449

ered irregular. To facilitate the comparison of experi- mental measurements and UTD predictions, twelve individual tests corresponding to twelve streets were extracted from the measurement programme. Predic- tions with the UTD formulation were made for the reconstructed screen profiles from the transmitting antenna to each of the receiver locations corresponding to the twelve tests. These receiver locations are illus- trated in Fig. 7.
1 krn 66 67 68 69
6483000 N 83
I 82 82 1
6481000 N 81
km
Fig. 7 propagation links f o r analysis
Contour map of the Auckland central business district together with
5
Field calculations are performed in two stages: namely, (i) determination of ray paths followed by (ii) ray field calculations. The ray path determination itself requires two steps: terrain profile reconstruction followed by superposition of ground cover (i.e. building height) information.
Terrain and ground cover modelling
5.1 Terrain modelling The test environment investigated by Rowe and Wil- liamson [9] at 851 MHz included the 9km2 geographical area comprising the central business district of Auck- land. Experimental data recorded on a street-by-street basis exists for this area, and can be used to validate path loss predictions made using the phase 111 model. As such, it was appropriate to develop a terrain model for this area.
The only contour data available to the authors was a 1:25 000 topographical map with contours spaced at 20 m intervals. The 9 km2 geographical area corresponding to the test environment is illustrated in Fig. 7. It was decided that a horizontal resolution of 50m would rep- resent the geographical features of the test area reason- ably well, and was adopted. The final interpolated height matrix M thus has dimensions 60 x 60 (i.e. each square kilometre is a 20 x 20 submatrix.) All values in this matrix M were initially unknown.
Three types of data were used to initially define val- ues in the matrix M: namely, (i) contour lines of fixed height, (ii) known spot heights, and (iii) other heights derived from personal knowledge of the environment.
The contour lines were used to specify fixed heights (i.e. 20, 40, 60 and 80 m) throughout the matrix M. This was done by overlaying a 20 times 20 transparent grid onto each of the nine lkm2 cells comprising M. The values along the contours were then quantised to the nearest 50m on this grid, and entered into the cor- responding position in M. Known spot heights were also entered into M using the same approach. Other heights (e.g. the regions between the spot heights) were
450
assessed by the authors from personal knowledge and entered into M. These latter heights were required to ensure the correct modelling of ridges and gullies which the contour map did not accurately represent.
At this point, M contained a number of known height values arranged predominantly along linear tra- jectories throughout the matrix. However, between these trajectories, the height values were still unknown. To estimate these remaining values, linear interpola- tions were performed along the rows and columns between the known values, and the vertical and hori- zontal estimates averaged. This process produced esti- mates for all the previously unknown values in M. However, in some regions (such as close to isolated peaks) the interpolation did not adequately represent the true three-dimensional nature of the terrain. To obtain a better estimate, a 3 x 3 sampled lowpass Gaussian kernel given by
ri 2 ii
was convolved with M to smooth the terrain height values.
To illustrate the accuracy of this technique, the origi- nal contour map is presented in Fig. 7 together with contours derived from the interpolated matrix M. Although not agreeing perfectly in all cases, the nature of the terrain is represented to sufficient accuracy to permit path loss calculations.
To estimate the path loss between two points on the map in Fig. 7 using the phase I11 model, it is necessary to combine the terrain profile with land usage data. The resulting equivalent screen profile can then be used in conjunction with ray methods to calculate the path loss.
5.2 Ground cover modelling While terrain information was readily available from topographic maps, land usage information was not so readily available and had to be estimated from photo- graphs taken during the original field work. (Consider- able central city reconstruction during the late 1980s meant accurate land usage data could not be obtained for the period of the field trials.) In light of this defi- ciency it was decided to investigate the effect of ran- dom building height variations on the path loss. Accordingly, for each of the twelve terrain profiles a total of five hundred normally-distributed random building height profiles (mean height 20m, height standard deviation 4m) were considered. A constant screen spacing of 60m was used in all cases. A total of six thousand equivalent screen profiles were thus con- structed by combining each set of five hundred random building profiles with their corresponding terrain pro- file. The Fresnel ellipsoids used to determine obstacle clearance were specified by a scattered path length dif- ference of 6 = hl2 in all cases.
6 Results
Estimates of the mean path loss E , and path loss standard deviation 6 were made from the predicted path losses for the ffve hundred different equivalent screen profiles considered for each receiver location. Results are tabulated in Table 1, together with mean
IEE Proc.-Microw. Antennas Propag., Vol. 142, No. 6, December 1995

path loss estimates Le and standard deviations 6 , measured experimentally by Rowe and Williamson [9]. As discussed in Section 2, an earlier communication [ 5 ] , in which building height variation was permitted only in the screen closest to the mobile and the topography was uniform, presented results that consistently under- estimated 6,. The primary purpose of the work reported here was to investigate the effect of variations in nonlocal features (i.e. terrain and building heights) on 6,. The results clearly show that nonlocal terrain and building height irregularity can influence 6, to a marked extent. However, the overestimation of 6, in the majority of tests implies that accurate land usage data will be an essential prerequisite of future deter- ministic propagation models.
Table 1: Path loss and standard deviation predictions (in dB)
Test UTD Expt
1 120.6 4.6 118.6 5.5
2 139.8 7.5 130.4 8.1
3 125.2 8.6 117.0 3.3
4 115.6 6.3 106.1 5.7
5 119.4 6.3 112.5 1.6
6 115.3 3.4 111.8 4.2
7 124.7 6.9 133.0 6.1
8 117.4 4.5 131.3 3.5
9 120.3 7.7 119.5 1.9
10 120.3 7.7 119.3 1.3
11 123.1 8.0 122.2 6.5
12 118.2 7.8 119.5 2.5
Whereas building height variatioqs are seen to pro- vide the primary influence on 6,, L , is most affected by the terrain profile. Inaccurate predictions in some tests can be attributed to the lack of accurate land usage data. For example, the profile in test 8 traverses a dense part of the Auckland central business district known to contain tall buildings (-30m) that would impart the greater diffraction loss measured experimen- tally. Furthermore, the profile in test 2 traverses an open region (Albert Park) that would impart the smaller diffraction loss measured experimentally. These results suggest that access to representative land usage data would increase prediction accuracy.
7 Conclusions
Most mobile radio systems have been planned using empirical or semi-empirical propagation models. It is now necessary for researchers to lead system planners
away from empirical approaches toward those with a firm theoretical foundation. As a first step in this direc- tion, a ray-based approach is being assessed at the Uni- versity of Auckland. It is not intended at present to solve, or even address, all the problems of signal strength prediction in built-up environments. Rather, the broad applicability of the technique is being evalu- ated with finer details to be incorporated at a later stage.
This paper extends a previously published UTD- based formulation for mobile radio propagation predic- tion to consider the situation of irregular topography and non-uniform building heights. Terrain and building height irregularity in regions well removed from the terminals is shown to have a significant influence on path loss variability. The comparison between experi- mental results and predictions (made without the bene- fit of accurate land usage data) is very encouraging. The results suggest that a UTD-based formulation may have the potential to provide accurate predictions of path loss mean and variability in situations of irregular topography if accurate land usage data could be obtained. The versatility afforded by such an approach is unlikely to be replicated by alternative physical optics based techniques.
8 Acknowledgment
Acknowledgment is made to the Telecom Corporation of New Zealand Ltd for providing a research fellow- ship to one of the authors (MJN) during the course of the research, and to the New Zealand Foundation for Research, Science and Technology for providing a postdoctoral fellowship to the same author which is enabling the research to continue.
9
1
2
3
4
5
6
7
8
9
References
WALFISCH, J., and BERTONI, H.L.: ‘A theoretical model of UHF propagation in urban environments’, IEEE Trans., Dec.
SAUNDERS, S.R., and BONAR, F.R.: ‘Explicit multiple build- ing diffraction attenuation function for mobile radio wave propa- gation’, Electron. Lett., July 1991, 27, pp. 1276-1277 NEVE, M.J., and ROWE, G.B.: ‘Assessment of GTD for mobile radio propagation prediction’, Electron. Lett., Apr. 1993, 29, pp. 618-620 NEVE, M.J., and ROWE, G.B.: ‘Contributions toward the devel- opment of a UTD-based model for cellular radio propagation prediction’, IEE Proc. H, 1994, 141, pp. 407414 NEVE, M.J., and ROWE, G.B.: ‘Estimation of cellular mobile radio planning parameters using a GTD-based model’, Electron. Lett . , July 1993, 29, pp. 1372-1374 NEVE, M.J.: PhD thesis, University of Auckland, New Zealand, 1992 KOUYOUMJIAN, R.G., and PATHAK, P.H.: ‘A uniform geo- metric theory of diffraction for an edge in a perfectly conducting surface’, Proc. IEEE, Nov. 1974, 62, pp. 1448-1461 McNAMARA, D.A., PISTORIUS, C.W.I., and MALHERBE, J.A.G.: ‘Introduction to the uniform geometrical theory of dif- fraction’ (Artech House, 1990) ROWE, G.B., and WILLIAMSON, A.G.: ‘Mobile radio propa- gation in Auckland at 851 MHz’, Electron. Lett., Oct. 1986, 22, pp. 1154-1155
1988, AP-36, pp. 1788-1796
IEE Proc.-Microw. Antennas Propag., Vol. 142, No. 6, December 1995 451