Embed Size (px)
Citation preview

Modeling, Identi�cation and Control, Vol. 29, No. 4, 2008, pp. 151�165On the Mobility and Fault Tolerance of ClosedChain Manipulators with Passive JointsPål Johan From 1 Jan Tommy Gravdahl 1
1Department of Engineering Cybernetics, Norwegian University of Science and Technology, N-7491 Trondheim,Norway. E-mail: {from, tommy.gravdahl}@itk.ntnu.noAbstractA systematic analysis of the mobility of closed chain manipulators with passive joints is presented. Themain observation in this paper is that the mobility of the manipulator, considering the passive joints only,should always be zero. Further, for the manipulator to be fault tolerant, the mobility should remain zerowhen actuator failure occurs for an arbitrary joint. We present a simple and rigorous approach to theproblem of �nding the smallest set of active joints for which the manipulator remains equilibrated withrespect to free swinging joint failure in any joint. Several examples of how to choose the active joints fordi�erent mechanisms to guarantee that the manipulator is equilibrated and fault tolerant are presented.Keywords: Robotics, kinematics, mobility, fault tolerance.1 IntroductionClosed chain manipulators such as parallel manipula-tors and cooperating serial manipulators have manyadvantages over their serial counterparts. Parallel ma-nipulators are sti�er, faster and more accurate thanserial manipulators at the cost of a smaller workspace.Cooperating robots can handle heavier and larger ob-jects than serial manipulators and are thus the pre-ferred choice in many applications. Both parallel andcooperating robots are widely used especially in remoteand harsh environments where humans can not or donot want to operate. The need for a rigorous theoryon what happens when joint failure occurs is thus im-portant to be able to cope with unforeseen events suchas joint failures.This paper discusses the e�ect that passive jointshave on the mobility of parallel manipulators. Themain motivation and also the main example usedthroughout the paper is joint failure. We study theability of the mechanism to remain equilibrated whenfree-swinging joint failure (FSJF) occurs, see Tinóset al. (2006). FSJF is also referred to as torque failure
in the literature (Matone and Roth, 1999).We will denote a manipulator equilibrated if it canresist a wrench in an arbitrary direction, either throughkinematic constraints or through actuator torques. Weobtain this if the manipulator, considering the passivejoints only, has mobility equal to zero, i.e. we do notwant the passive joints to allow any motion when theactive joints are locked. If this property is satis�ed thisis the same as guaranteeing that manipulator does nothave an unstable singularity, following the classi�cationin Matone and Roth (1999).For non-overconstrained mechanisms, i.e. whenthere are no redundant constraints, we can apply thewell known Grübler formula. The active joints can bechosen arbitrarily as long as the manipulator remainsnon-overconstrained and the self-motion is considered.For overconstrained mechanisms, there are many ap-proaches to determine the mobility. In Dai et al. (2006)the mobility of the mechanism is found from the con-straint space. The constraints of the system are foundsystematically and the redundant constraints are iden-ti�ed. The mobility is then found by adding the de-grees of freedom represented by these redundant con-ISSN 1890�1328 c© 2008 Norwegian Society of Automatic Control

Modeling, Identi�cation and Controlstraints to the Grübler formula for non-overconstrainedmechanisms. This approach illustrates well the e�ectof redundant constraints in the mechanism.The mobility can also be found by the motion spaceas in Rico et al. (2003) and Rico et al. (2006). The de-gree of freedom of the motion of the end e�ector is �rstfound. Then the degree of freedom of the self-motionmanifold of each chain is added. By this approach theredundant constraints are not found directly. This ap-proach also gives valuable in-sight on where to placeredundant actuators in the mechanism.We present a systematic and rigorous analysis of themobility of closed chain mechanisms based on the the-ory of twists. The analysis makes it possible to calcu-late the mobility of the mechanism based on the num-ber and type of joints in each sub-chain. We then de-termine the minimum set of active joints needed for themanipulator to be equilibrated and fault tolerant. Themechanism needs to be equilibrated not only with re-spect to forces acting on the end e�ector, but also withrespect to forces acting on the chains. Thus, in addi-tion to the end-e�ector motion we also need to considerthe internal motion of each chain to guarantee that themechanism is equilibrated.We present several examples of how to apply the the-ory presented to di�erent mechanisms. For three typesof mechanisms, exceptional linkage and trivial linkageof type I and II, we show how to choose the minimumnumber of active joints so that the mechanisms areequilibrated and fault tolerant.2 Rigid Body MotionThis section gives the background of mathematicalmodelling of rigid body motion. For a detailedoverview of the topic, the reader is referred to Mur-ray et al. (1994) and Meng et al. (2007).We will use the special Euclidean group SE(3) torepresent the con�guration space of a rigid body. Inaddition to its group structure, SE(3) is a di�eren-tiable manifold, and is what is known as a Lie group.SE(3) is thus a matrix Lie group and can be writtenby homogeneous coordinates
SE(3) =
{[R p
0 1
]
| p ∈ R3, R ∈ SO(3)
} (1)where SO(3) is the 3-dimensional special orthogonalgroup. An element g ∈ SE(3) represents a rotationand a displacement of a rigid body relative to a refer-ence con�guration. The manifold structure of SE(3) isgiven byΦ : SO(3) n R3 → SE(3) : (R, p) 7→
[R p
0 1
]
. (2)
Associated with every Lie group G is its Lie algebrag which is de�ned as the tangent space of G at theidentity e and is written as g , TeG. A vector space Vis a Lie algebra if there exists a bilinear operation givenby the matrix commutator [v1, v2] = v1v2 − v2v1. TheLie algebra se(3) of SE(3) consist of all 4× 4 matrices
se(3) =
[ω v
0 0
] (3)where v ∈ R3 and ω is the skew-symmetric matrixrepresentation of ω ∈ R3 given byω =
0 −ω3 ω2
ω3 0 −ω1
−ω2 ω1 0
∈ so(3). (4)An element of se(3) can be represented by the twist co-ordinates ξ =[vT ωT
]T∈ R6 which can be identi�edwith the twist ξ ∈ se(3) by the map
∧ : R6 → se(3) : ξ =
[v
ω
]
7→ ξ =
[ω v
0 0
]
∈ se(3). (5)The exponential mapexp : se(3) → SE(3) : ξ 7→ eξ (6)de�nes a local di�eomorphism taking the zero vector of
se(3) to the identity element of SE(3). Physically eθξ,θ ∈ R corresponds to a screw motion along the axisof a �xed ξ. Denote by Lg and Rg the left and righttranslation map, respectively. The di�erential Lg∗ ofLg de�nes the body velocity and the di�erential Rg∗ ofRg de�nes spatial1 velocity of a rigid body. Then for atrajectory g(t) ∈ SE(3), t ∈ (−ε, ε), the body velocityof the rigid body is given by
V b = Lg(t)−1∗ · g(t) =
[
RTR RTp
0 0
]
=
[ω v
0 0
] (7)while the spatial velocity is given by V s = Rg−1∗ ·g. The body and spatial velocities are related by theAdjoint map
V s = AdgVb (8)where g = (R, p) andAdg =
[R pR
0 R
]
. (9)We will write the twist of joint i as Gi and the twistsystem of chain j asMj = (G1,G2, . . . ,Gn) = (Mj1,Mj2, . . . ,Mjn). (10)1In this context, spatial means that the velocity is given withrespect to a globally de�ned coordinate system. We will alsouse spatial for the 3-dimensional space, as opposed to theplanar case.152

From and Gravdahl, �Fault Tolerance�where we use the second notation Mji when we needto clarify what chain the joint belongs to. We use thesame notation for the joint angles, i.e. θji. The twistsystem describes the motion of the end e�ector for theopen chain.We will introduce the following notation from Daiet al. (2006) to represent sets of twists or wrenches.Braces {·} are used to indicate a set that containsunique elements while angle brackets 〈·〉 are used toindicate multisets which may contain multiple entriesof each element. We will use cardinality (card) to givethe number of elements in 〈Mj〉 or {Mj}. For {Mj},the cardinality is equal to the dimension. Let the par-allel manipulatorM = M1||M2|| · · · ||Mk (11)consist of k serial manipulator sub-chains that share acommon base and a common end e�ector. The set ofend-e�ector motions is de�ned as (Meng et al., 2007)
CM = CM1 ∩ CM2 ∩ · · · ∩ CMk, (12)where CMj
is the set of rigid transformations that Mjgenerates without loop constraints. CM de�nes thecon�gurations of the end e�ector with the loop con-straints imposed.We are interested in the passive motion, i.e. themotion due to the passive joints when the active jointsare �xed. We denote this byMP = MP1||MP2|| · · · ||MPk (13)where MPj consists of only the passive joints of ma-nipulator j.Although only the passive joints are considered, thetwists of the passive joints depend on the con�gurationof the active joints. The twist of joint i is given by
G′
i = Adg(i−1)Gi (14)where gi ∈ SE(3) is the transformation from the baseto joint i. We will assume it implicitly understood thatthe twists, as written in (10), are transformed accord-ing to (14), and thus write G for G′.We will �nd the mobility D considering the passivejoints only. If the mobility of the mechanism is zero wecan conclude that the mechanism is equilibrated withrespect to any external force. On the other hand, if
D > 0 an additional condition needs to be satis�ed forthe mechanism to be equilibrated. This is not consid-ered in this paper.We will denote a mechanism equilibrated if the fol-lowing is satis�ed:De�nition 2.1. A manipulator M is denoted equi-librated with respect to an external wrench Fext =
[fT τT
]T where f, τ ∈ R3, if M, either through kine-matic constraints or through actuator torque, can pro-duce a wrench opposite to Fext, i.e. M can producethe wrench −kFext for some k > 0. In the case thatan arbitrary wrench that can be accommodated by thekinematic constraints, we will say that the manipulatoris passively sustained. When an arbitrary wrench canbe produced by the actuation torque, we will denote itactively equilibrated.Note that we do not require that the manipulator canresist any external wrench, only that it can produce awrench of a given type and direction.In the next section we start by looking at the casewhen the constraints are linearly independent, i.e. non-overconstrained mechanisms. This is very restrictive,and the results may be misleading if they are not usedwith caution. Non-overconstrained mechanisms, arehowever, easy to understand and many of the resultsfrom the non-overconstrained case are also true foroverconstrained mechanisms.3 Non-overconstrainedMechanismsWe start by looking at the mobility of non-overconstrained mechanisms when passive joints arepresent and �nd a set of rules to guarantee that themanipulator is fault tolerant.3.1 The Planar CaseFor the planar case the mobility of the closed chainmechanism is given by Grübler's formulaD = 3N −
n∑
i=1
(3 − fi). (15)where N is the number of links in the mechanism andn is the number of joints. fi is the degree of freedom ofjoint i which is 1 for the lower pairs. Grübler's formulathen becomes
D = 3N − 2n. (16)We will start by a simple result which states that a non-overconstrained closed chain manipulator is always re-sistant to external forces if the number of active jointsis equal or larger than the dimension of the end-e�ectormotion Q. The only requirement is that the manipula-tor remains non-overconstrained when the joint chosenas active is considered �xed. This is the same as re-quiring that every component of the end-e�ector mo-tion and the internal motion of each chain is generatedby at least one joint, or to require that only joints thatare not locked are chosen. All the results and examples153

Modeling, Identi�cation and Controlcan easily be generalised to 2 or 3 degree of freedomjoints. For simplicity we restrict ourselves to the casefi = 1.Proposition 3.1. Given a desired end-e�ector motiontype Q with m = dim(Q) and a planar parallel manip-ulator M = M1|| · · · ||Mk. Then if m joints, whichare not already locked, are chosen active, then MP islocked and M is equilibrated.Proof. Assume all joints passive so that D = m. Thenby choosing the active joints we need to reduce thedegree of freedom of the remaining joints (MP ) to zero.We have that for each joint that is chosen active, n inEquation (16) is reduced by one. Disregarding thisjoint, i.e. assuming it �xed, the number of links Nis also reduced by one. The degree of freedom of theremaining passive joints when the mechanism remainsnon-overconstrained is thus given by
D1 = 3(N − 1) − 2(n − 1)
= 3N − 2n − 3 + 2
= D − 1. (17)Repeating this m times, we will have Dm = D − mwhere the subscript in Di is the number of active jointsin the mechanism. The mobility of MP is thus zero.This is consistent with the result that at least m ac-tuators are needed to generate a motion of dimensionm. Hence, by choosing m joints active, the mechanismMA, considering both active and passive joints, gen-erates Q and MP is equilibrated with respect to anyexternal disturbance.3.2 The Spatial CaseFor the three-dimensional Euclidean space, Grübler'sformula becomes
D = 6N −n∑
i=1
(6 − fi), (18)where fi is 1 for the 1-dimensional lower pairs and wewriteD = 6N − 5n. (19)Proposition 3.2. Given a desired end-e�ector motiontype Q with m = dim(Q) and a spatial parallel manip-ulator M = M1|| · · · ||Mk. Then if m joints, whichare not already locked, are chosen active, then MP islocked and M is equilibrated.
Proof. The proof follows from the planar case. Bychoosing the active joints both n and N are re-duced by one. The degree of freedom of the remain-ing passive joints when the mechanism remains non-overconstrained is thus given byD1 = 6(N − 1) − 5(n − 1)
= 6N − 5n − 6 + 5
= D − 1. (20)Repeating this m times, we will have that the mobilityof MP is zero.Thus we see that we can derive three equivalentrules on how to choose the active joints for non-overconstrained mechanisms:• Choose the active joint from the set of joints thatis not locked due to the kinematic constraints,considering the previously chosen active joints as�xed.• Choose the active joint such that the mechanismremains non-overconstrained.• Choose the active joints such that every compo-nent of the end-e�ector motion and the internalmotion of each chain is generated by at least oneactive joint.From Propositions 3.1 and 3.2 we see that the activejoints cannot be placed arbitrarily. We need to place atleast one active joint for each degree of freedom of theself-motion manifold in the respective chain. Denotethe freedom of chain j by Dj . This is found by applyingGrübler's formula to each chain. For the manipulatorto be equilibrated we need to place Dj active joints inthe set of joints that generate the self-motion.Once this is done, we need to place the remaining
dim(Q) active joints. Each degree of freedom of Q cor-responds to a one degree of freedom motion. Then,for each component of the motion Q, one active jointmust be chosen among the joints that generate the cor-responding 1 DOF motion. This will guarantee thatevery �direction� of the end-e�ector motion is activelyequilibrated when the active joints are locked.3.3 Fault ToleranceFor the manipulator to be fault tolerant we need toplace the redundant actuators in a similar manner. Re-dundant actuators are the actuators that will guaran-tee that the manipulator remains actively equilibratedwhen actuator failure occurs.For the chain to be fault tolerant we need Dj + 1active joints in Mj for all chains that are not pas-sively sustained, i.e. whenever Dj > 0. These active154

From and Gravdahl, �Fault Tolerance�joints must be chosen among the joints that generatethe self-motion. This guarantees that the chains arefault tolerant. In addition, for each subgroup of Q,one redundant active joint must be chosen among thejoints that generate the motion of the respective sub-group. Note that one joint can generate a motion inmore than one sub-group. We also note that if a re-dundant joint is implemented in a chain, this will alsomake the mechanism fault tolerant for joint failures inany active joint that generate a motion in the samesubgroup as the redundant joint.The results presented so far only apply for non-overconstrained manipulators. The results do, how-ever, with a few modi�cations, give valuable in-sightinto the mobility of overconstrained manipulators. Aspatial manipulator may generate motion that is notidenti�ed by applying the spatial Grübler formula. Ifa subset of the joints generate motion in the plane, theplanar Grübler formula must be applied to these jointsto �nd the dimension of the motion generated by thesejoints. In fact, this is the case for all the subgroups. Toguarantee that the passive joints do not generate anymotion, the Grübler formula must be applied to all theten subgroup of SE(3), with d being the dimension ofthe subgroupD = dN −
n∑
i=1
(d − fi). (21)Here, only the joints or sets of joints that generatemotion in the given subgroup are considered.Thus, for the spatial case, the mobility needs to bechecked for all the ten subgroups of SE(3) in additionto the spatial Grübler formula. Similarly for the pla-nar case the mobility needs to be checked for all thesubgroups of SE(2), i.e. T (1), T (2) and SO(2), in ad-dition to the planar Grübler formula.The same is true for the self-motion. A chain ina spatial mechanism can have self-motion even if themobility by the spatial Grübler formula is zero. Alsoin this case, the mobility needs to be checked for allthe subgroups of SE(3). When the mobility is foundto be greater than zero, the active and the redundantjoints can be chosen arbitrarily among the joints thatgenerate the respective motion.We see that the Grübler formula is not very wellsuited for overconstrained mechanisms. In the follow-ing we thus show how to use the theory of twists to�nd the mobility of general mechanisms by applyingthe Grübler formula only once or without applying theGrübler formula at all.
4 Overconstrained MechanismsWhen the constraints are not linearly independent, themechanism is over-constrained, i.e. some of the con-straints are redundant and have no e�ect on the mobil-ity. Based on the approach in Dai et al. (2006) we �rstidentify the constraints that are common for all chainsand eliminate the redundancy in this set. This set iseasily identi�ed as the intersection of the constraintspace of all the chains. Further the constraints thatconstrain each chain to the end e�ector-motion, theend e�ector constraint system, are identi�ed and againthe redundant constraints are found from this set. Theapproach presented in Dai et al. (2006) is based onthe screw system of the mechanism and represents theconstraint space as reciprocal screws. Here, we applythe same general idea as in Dai et al. (2006). Theapproach is based on an analysis of the sub-algebrasand sub-manifolds of the Lie Algebra se(3) and theircotangent spaces.The approach is general in the sense that no classi�-cation of the mechanism is required. As pointed out inRico et al. (2003), the classi�cation of the mechanismis not needed to determine its mobility. However, inour setting, the classi�cation is important in the sensethat it tells us where to place the active joints. As forthe non-overconstrained case, the active joints cannotbe placed arbitrarily in the mechanism. We will seethat only in very special cases can the active joints bearbitrarily chosen in the mechanism.The approach in Dai et al. (2006) is based on theconstraint space formulation. It is also shown that themobility can be found by the motion space as in Ricoet al. (2003) and Rico et al. (2006). By this approachthe chains are also classi�ed and it is straight forwardto determine the e�ect a passive joint has on the mech-anism. We will use the motion space approach to setup a set of simple rules on where to place the activejoints in the mechanism in order for the mechanism tobe equilibrated. This set of rules naturally leads to anapproach on how to choose actuator redundancy moste�ciently to make the manipulator resistant to jointfailures.4.1 The Constraint SpaceTo �nd the mobility from the constraint space as in Daiet al. (2006), we start by denoting the motion space ofthe chain j asMj = (G1,G2, . . . ,Gnj
) (22)where Gi is the twist of joint i and nj is the numberof joints in chain j. Recall that braces {·} are usedto indicate a set that contains unique elements while155

Modeling, Identi�cation and Controlangle brackets 〈·〉 are used to indicate multisets whichmay contain multiple entries of each element.We will denote the constraint system of chain j asM
C
j = M⊥
j (23)where M⊥
j = {F ∈ R6 | F · V = 0, ∀ V ∈ Mj} whichis the vanishing of the reciprocal product of Ball (Lip-kin and Du�y, 2002). This represents the constraintsimposed on the end e�ector by chain j. Note that wecannot identify the self-motion from MC
j .Further we will de�ne mechanism motion as theunion of all the twists in the systemMM = M1 ∪M2 ∪ · · · ∪Mk, (24)evaluated at g ∈ CM1 ∩ · · · ∩ CMk
. The end-e�ectorconstraints is given as the union of the constraints ofeach chain,M
C
E = MC
1 ∪MC
2 ∪ · · · ∪MC
k , (25)evaluated at g ∈ CM1 ∩ · · · ∩ CMk. From this we can�nd the constrained motion of the end e�ector
ME = (MC
E)⊥. (26)The intersection of all the constraints are further givenbyM
C
M = MC
1 ∩MC
2 ∩ · · · ∩MC
k , (27)or alternativelyM
C
M = (MM )⊥. (28)With the notation of braces and angle brackets, eachof the subsets introduced in this section is given by{MM} =
k⋃
j=1
Mj , 〈MM 〉 =
k∑
j=1
Mj ,
{MC
E} =
k⋃
j=1
M⊥
j , 〈MC
E〉 =
k∑
j=1
M⊥
j ,
{ME} =
k⋂
j=1
Mj , {MC
M} =
k∑
j=1
MC
j ,
{ME} = {MC
E}⊥ {M
C
M} = {MM}⊥
{ME} = 〈MC
E〉⊥, {M
C
M} = 〈MM 〉⊥.Thus, the collection of all constraints is given in 〈MC
E〉,including repeated elements. The �rst step is to fac-torise out all the constraints that are common for allchains. The �directions� of the end e�ector representedby these constraints can be considered the most robust
directions as they are constrained by all the sub-chainsin the mechanism. The constraints that are commonfor all sub-chains is given by {MC
M}. We will say that asingle subchain cannot have redundant constraints (asseen from the other chains or the end e�ector). This isalways true. Because {MC
M} is the same for all chainswe can write〈M
C
M 〉 = k · {MC
M}. (29)We see that 〈MC
M 〉 is (k − 1) times redundant.For each chain we can factorise out this part by tak-ing{M
C
j } = {MC
M} ∪ {MC
Cj} (30)where {MC
M}∩{MC
Cj} = ∅. We can add the multisetsof Equation (30) and get〈M
C
E〉 = 〈MC
M 〉 + 〈MC
C〉
= k · {MC
M} + 〈MC
C〉 (31)where 〈MC
M 〉 ∩ 〈MC
C〉 = ∅. As the redundancy in〈M
C
M 〉 is already dealt with, we can focus on 〈MC
C〉which may also be redundant. We start by writing〈M
C
C〉 = {MC
C} + 〈MC
ν 〉. (32)Here, {MC
C} is the linearly independent part which re-stricts the motion of the end e�ector to ME , while〈M
C
ν 〉 is the collection of the constraints that are lin-early dependent of the entries in {MC
C}. Thus, the re-dundant constraints given by the term 〈MC
C〉 in Equa-tion (31) are given by card〈MC
ν 〉. The total redun-dancy in the constraint system is given bycard〈MC
Eν〉 = (k − 1)card{MC
M} + card〈MC
ν 〉. (33)Finally, we also note that 〈MC
Eν〉 can also be fac-torised out from〈M
C
E〉 = {MC
E} + 〈MC
Eν〉. (34)4.2 The Modi�ed Grübler FormulaThe Grübler formula does not take redundant con-straints into consideration. Redundant constraint areconstraints that do not reduce the mobility of the ende�ector or the chains. We therefore need to add theseto the Grübler formula. The Modi�ed Grübler formulaas presented in Dai et al. (2006) is given by adding (33)to (18)D = dN−
n∑
i=1
(d−fi)+(k−1)·card{MC
M}+card〈MC
ν 〉(35)156

From and Gravdahl, �Fault Tolerance�where d is the dimension of the space, normally 3 or 6.This expression identi�es the redundant constraints. Italso gives the mobility due to self-motion. It does not,however, identify very easily due to what joints thesemotions occur. This is considered in more detail in thenext section.4.3 The Motion SpaceThe mobility of the mechanism tells us how many ac-tive joints are needed for the mechanism to be equili-brated. However, it does not tell us what joints can beset as passive and what joints need to be active. In thefollowing, we will show that an alternative to the Mod-i�ed Grübler formula given in (35) can be found fromthe motion space and we will show how this approachnaturally leads to the classi�cation of di�erent types ofoverconstrained joints. This is the same classi�cationof overconstrained chains as in Rico et al. (2003) andRico et al. (2006). Further, in the next section, we willuse this to set up a set of simple rules on where theactive joints need to be placed, i.e. how many activejoints need to be placed in each chain, as well as theirposition in the chain.4.3.1 Exceptional LinkagesIn Rico et al. (2003), two sub-chains that have an in-tersection, but for which the motion space of one sub-chain is not a subspace of the other, is denoted excep-tional linkage. We refer to the work of Hervé (1978) fora formal de�nition of exceptional, trivial and paradoxi-cal linkages. Paradoxical linkages are not treated here.In Rico et al. (2006) this is generalised to the case ofarbitrarily many chains. Here we will look at it froma di�erent view in order to get a deeper understandingof the mobility criterion.We start by �nding the mobility of the end e�ector.This is given by the intersection of the motion space ofeach chain{ME} =
k⋂
j=1
{Mj}, (36)evaluated at g ∈ M1 ∩ · · · ∩ Mk. Thus the mobilityof the end e�ector is given by card{ME}. Each chainmay also have a mobility independent of the mobilityof the end e�ector. This is the self-motion and is givenby the degree of freedom in the chain and subtractingthe dimension of the open loop end-e�ector motion of
the chain.card{Msm}j =
nj∑
i=1
fi − card{Mj},
card{Msm} =
k∑
j=1
(nj∑
i=1
fi − card{Mj}
)
. (37)The total mobility of the mechanism is then given byadding (37) to (36). We will write this as a propositionand provide a di�erent proof than that of Rico et al.(2006).Proposition 4.1. The total mobility of a mechanismis given by the degree of freedom of the end e�ector,given in Equation (36) and the self-motion of the chain,given in Equation (37) byD = card{ME} +
k∑
j=1
(nj∑
i=1
fi − card{Mj}
)
,
= card{ME} +
n∑
i=1
fi −k∑
j=1
card{Mj}. (38)Proof. (sketch) The result follows directly from the ob-servations that a) the degree of freedom of the end ef-fector is given by the dimension of {ME} in Equation(36); and b) that the self-motion of each chain is givenby Equation (37).a) The degree of freedom of the end e�ector is givenby the dimension of {ME} in Equation (36). Thisfollows directly from Meng et al. (2007).b) The dimension of the self-motion manifold can befound in most textbooks on robotics (e.g. Murrayet al. (1994)) to be the dimension of the null of theJacobian N (J), which is given as dim(N (J)) =nj − m where nj is the number of joints and m isthe dimension of the end-e�ector motion for theopen chain. This equivalent to (37).We are mainly concerned with the e�ect of adding ajoint to the chain. Adding a joint to a chain M willhave the same e�ect as making one joint passive whenonly the passive joints of the manipulator are consid-ered, i.e. adding a joint to MP . In this section we lookat the e�ect of adding a joint to the mechanisms and inthe next section we use these results to analyse in whatcase the manipulator is equilibrated. We will use thereasoning in Proposition 4.1 and the observation thata joint that increases the dimension of the end e�ectormotion of the open chain, but not of the closed chain,will always be locked. Then there are three di�erentoutcomes of adding a joint to the manipulator: 157

Modeling, Identi�cation and Control•∑nj
i=1 fi increases by one while card{Mj} doesnot.− The dimension of the self-motion manifold ofthe chain increases by one.
•∑nj
i=1 fi and card{Mj} increase by one whilecard{ME} does not.− The joint will be locked and the mobility ofthe system does not change.
•∑nj
i=1 fi, card{Mj} and card{ME} increase byone.− The mobility of the end e�ector increases byone.− The dimension of the self-motion manifold ofthe chain does not increase.Thus, by checking the dimension of card{Mj} and
card{ME} we can e�ectively �nd the e�ect that a jointfailure has on the mobility of the end e�ector.4.3.2 Trivial Linkage of Type IIn Rico et al. (2006) the case when all the sub-chainsgenerate the same motion{Mj} = {ME} for j = 1 . . . k (39)is denoted trivial linkages. In this case the mobility isfound directly from (38) by
D = card{ME} +
k∑
j=1
(nj∑
i=1
fi − card{ME}
)
= card{ME} − k · card{ME} +k∑
j=1
(nj∑
i=1
fi
)
=
n∑
i=1
fi − (k − 1) · card{ME}. (40)In this case there are only two di�erent outcomes:•∑nj
i=1 fi increases by one while card{Mj} doesnot.− The dimension of the self-motion manifold ofthe chain increases by one.
•∑nj
i=1 fi and card{Mj} increase by one.− The joint will be locked and the mobility ofthe system does not change.
•∑nj
i=1 fi, card{Mj} and card{ME} increase byone.− Will never occur.
4.3.3 Trivial Linkage of Type IIIn Rico et al. (2003) the case when the entire motionof the end-e�ector, connected by two sub-chains, canbe determined and is restricted by one chain is denotedtrivial linkage. As they only consider single loops, theconstraints of the other chain does not a�ect the mo-bility of the end e�ector. In our setting, we de�ne thecorresponding multi-loop classi�cation of trivial link-age as the following. Assume that we have E′ manipu-lators that all generate ME and M ′ manipulators thatall generate MM , where ME ⊂ MM . Then the totalmobility of the system is given by ME and the internalmobility of each of the chains. The internal mobility ofthe chains in ME and MM must, however, be treateddi�erently.The total mobility of the system is then given byD = card{ME} +
k∑
j=1
(nj∑
i=1
fi − card{Mj}
)
= card{ME} +∑
E
(nj∑
i=1
fi − card{ME}
)
+∑
M
(nj∑
i=1
fi − card{MM}
) (41)=
n∑
i=1
fi − (E′ − 1) · card{ME} − M ′ · card{MM}where∑E sums over all the chains that generate MEand ∑M sums over all the chains that generate MM .Also in this case there are three di�erent outcomeswhich we will divide into two classes:For j ∈ M ,•∑nj
i=1 fi increases by one while card{Mj} doesnot.− The dimension of the self-motion manifold ofthe chain increases by one.
•∑nj
i=1 fi and card{Mj} increase by one whilecard{ME} does not.− The joint will be locked and the mobility ofthe system does not change.
•∑nj
i=1 fi, card{MM} and card{ME} increase byone.− Will never occur.For j ∈ E,
•∑nj
i=1 fi increases by one while card{Mj} doesnot.− The dimension of the self-motion manifold ofthe chain increases by one.158

From and Gravdahl, �Fault Tolerance�•∑nj
i=1 fi and card{Mj} increase by one whilecard{ME} does not.− The joint will be locked and the mobility ofthe system does not change.
•∑nj
i=1 fi, card{MM} and card{ME} increase byone.− The mobility of the end e�ector increases byone. The self-motion of the chain does notincrease.5 Fault ToleranceIn this section, we look into the e�ect of free-swingingjoint failure (FSJF), or torque failure, in parallel ma-nipulators and how the results from the previous sec-tion can be used to prevent that the mechanism turnsinequilibrated when this occurs. For a general treat-ment and an approach on how to identify joint failuresee Tinós et al. (2006). In this case, as the number ofpassive joints in the manipulator increases by one, themobility of MP may remain zero or increase by one.Let m be the number of active joints in M. When
MP does not allow any motion after the joint failure,we haveDm = 0
FSJF====⇒ Dm−1 = 0 (42)and the manipulator remains equilibrated with respectto external forces. When MP allows a 1 DOF motionas a result of the joint failure, i.e.
Dm = 0FSJF
====⇒ Dm−1 = 1, (43)the mechanism is not fault tolerant.We are interested in the condition for which Dm−1 =0. As seen in the previous section, the e�ect of a free-swinging joint failure depends on the joint. We start bysetting up a set of rules that determines if a joint failurewill increase the mobility ofMP . This can also be usedas a design criterion to guarantee the mechanism to befault tolerant. We do that by determining where toput the actuator redundancy most e�ectively in orderfor the manipulator to be resistant to a joint failure ofany joint.In the following we will �nd the conditions for whichthe mechanism is equilibrated for all the di�erent out-comes of joint failure found in Section 4.3.5.0.4 Exceptional Linkages•∑nj
i=1 fi increases by one while card{Mj} doesnot.− The end e�ector is equilibrated. Chain j willonly remain equilibrated if it is actuator re-dundant. The redundancy must be in the setof joints in which the self-motion occurs.
•∑nj
i=1 fi and card{Mj} increase by one whilecard{ME} does not.− No action needed. Both end e�ector andchains are equilibrated.
•∑nj
i=1 fi, card{Mj} and card{ME} increase byone.− The mobility can be compensated with ac-tuator redundancy in any joint that is notlocked for the motion generated by MP .5.0.5 Trivial Linkage of Type I
•∑nj
i=1 fi increases by one while card{Mj} doesnot.− The end e�ector is equilibrated. Chain j willonly remain equilibrated if it is actuator re-dundant. The redundancy must be in the setof joints in which the self-motion occurs.
•∑nj
i=1 fi and card{Mj} increase by one.− No action needed. Both end e�ector andchains are equilibrated.
•∑nj
i=1 fi, card{Mj} and card{ME} increase byone.− Will never occur.5.0.6 Trivial Linkage of Type II.For j ∈ M ,
•∑nj
i=1 fi increases by one while card{Mj} doesnot.− The end e�ector is equilibrated. Chain j willonly remain equilibrated if it is actuator re-dundant. The redundancy must be in the setof joints in which the self-motion occurs.
•∑nj
i=1 fi and card{Mj} increase by one whilecard{ME} does not.− No action needed. Both end e�ector andchains are equilibrated.
•∑nj
i=1 fi, card{MM} and card{ME} increase byone.− Will never occur.For j ∈ E,
•∑nj
i=1 fi increases by one while card{Mj} doesnot. 159

Modeling, Identi�cation and Control− The end e�ector is equilibrated. Chain j willonly remain equilibrated if it is actuator re-dundant. The redundancy must be in the setof joints in which the self-motion occurs.
•∑nj
i=1 fi and card{Mj} increase by one whilecard{ME} does not.− No action needed. Both end e�ector andchains are equilibrated.
•∑nj
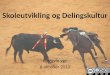
i=1 fi, card{MM} and card{ME} increase byone.− The mobility can be compensated with ac-tuator redundancy in any joint that is notlocked for the motion generated by MP .From the results presented in this section, we see thatwe can easily verify if redundant actuation is neededwhen joint failure occurs for a given active joint. Ifjoint failure does not lead to self-motion of the chainit may be compensated for by another redundant ac-tuated joint that is not locked for this motion. Thesecases are important to recognise in order to not placeunnecessary many active joints in the mechanism. If,on the other hand, the joint failure leads to self-motion,a redundant actuated joint is always needed in the re-spective chain. These observations lead to a simple ruleon how to place the redundant active joints in orderto guarantee that the mechanism remains equilibratedwhen actuator failure occurs for an arbitrary joint.6 ExamplesWe are interested in the condition for which Dm−1 = 0.As seen in the previous section, the e�ect of a freeswinging joint failure depends on the joint in which itoccurs. In the following we show three examples onhow to determine where to put the actuator redun-dancy most e�ectively in order guarantee fault toler-ance with respect to any joint.6.1 Exceptional LinkagesConsider the mechanisms in Figure 1. One of the armsis kinematically redundant in order to avoid obstacles.We �nd the twists representing each chain
M1 =
{[vy
0
]
,
[p12 × wy
wy
]
,
[p13 × wy
wy
]
,
[p14 × wy
wy
]}
,
M2 =
{[vz
0
]
,
[p22 × wz
wz
]
,
[p23 × wz
wz
]
,
[p24 × wz
wz
]
[p25 × wz
wz
]
, Adg2,b5
[p26 × wx
wx
]}
. (44)
xy
z
M1
M2
M26
Figure 1: Exceptional linkage with self motionwhere pji =[xji yji zji
]T is some point on the rev-olute axis of joint i in chain j given in the interialframe. We can write the transformation from the baseb to joint 5 of M2 as R2,b5 and p2,b5 given by
R2,b5(θ2(2−5)) =
cos θ2 − sin θ2 0sin θ2 cos θ2 0
0 0 1
(45)p2,b5(θ1(1−5)) =
[x2,b4 y2,b4 z2,b4
]T (46)where θ2 =∑4
i=1 θ2i. We can then write the twists asM1 =
010000
,
z12
0−x12
010
,
z13
0−x13
010
,
z14
0−x14
010
, (47)M2 =
001000
,
y22
−x22
0001
,
y23
−x23
0001
,
y24
−x24
0001
, (48)
y25
−x25
0001
,
−z26z2,b4 cos θ2 − y26y2,b4
−z26z2,b4 sin θ2 + y26x2,b4
z26y2,b4 sin θ2 − z26x2,b4 cos θ2
cos θ3
sin θ3
0
160

From and Gravdahl, �Fault Tolerance�6.1.1 Equilibrated MechanismThe motion of each chain is given byM1 ∈ X (y), M2 ∈ X (z) ×R(w6) (49)where X (w) is the Schoen�ies group (3D translationand rotation about w) and
w6 = R2,b5wx. (50)The constrained space is given byM
C
1 =
{[0
wx
]
,
[0
wz
]} (51)M
C
2 ={[
0 0 0 − sin θ3 cos θ3 0]}T
=
{[0
R2,b5wx
]}
.Due to the kinematic constraints we have θ2 = 0which gives usM
C
E = MC
2 ∪MC
1 =
{[0
wx
]
,
[0
wy
]
,
[0
wz
]}
. (52)Note that none of these are redundant. We can nowwriteME = (M
C
E)⊥ =
{[wx
0
]
,
[wy
0
]
,
[wz
0
]}
∈ T (3).(53)These are clearly multisets, i.e. there are several di�er-ent combinations of joints that generate the particularmotion. We can now verify that the mechanism is ex-ceptional, i.e.ME ⊂ M1, ME ⊂ M2,
M1 * M2, M2 * M1.As the end e�ector has three degrees of freedom, weneed at least three active joints. These can be cho-sen arbitrarily among the joints that generate the end-e�ector motion, i.e. all joints except M26. At thisstage it is important that all the degrees of freedom in(53) and the internal motion are taken care of. To seethis we look at Equation (38) where we see that themobility can be divided into the degree of freedom ofthe end-e�ector and the self-motion of the chainsD = card{ME}
︸ ︷︷ ︸End-e�ector DOF+
k∑
j=1
(nj∑
i=1
fi − card{Mj}
)
︸ ︷︷ ︸DOF of self-motion of chain j
.(54)We get the following set of rules for choosing thejoints;
xy
z
M1
M14M24
M2
Figure 2: Exceptional linkage. We consider the activejoints as �xed and consider only the passivejoints, i.e. MP . The mechanismMP is equi-librated with respect to any external distur-bance. If M24 is chosen as the redundantactuation, the manipulator is also fault toler-ant. If M14 is chosen, it is not fault tolerant• choose four active joint of which at least one is cho-sen among the joints that generate the self motion,• choose the joints so that they generate the end-e�ector motion T (3).One example of how the active joints can be chosenis shown in Figure 2. We illustrate the mobility of
MP by setting the active joints rigid. We see thatthe manipulator, considering passive joints only, is nowequilibrated with respect to any external disturbances.6.1.2 Fault toleranceAssume we have chosen a set of joints like the ones inFigure 2 for which the manipulator is equilibrated. Af-ter observing that M26 does not a�ect the end-e�ectoror internal motion we get the twistsMP1 =
{[vy
0
]
,
[p14 × wy
wy
]}
, (55)MP2 =
{[vz
0
]
,
[p22 × wz
wz
]
,
[p24 × wz
wz
]}
. (56)Then the e�ect of adding a joint to the chain in MP ,i.e. turning one of the active joints passive in M, de-pends on the joint in question. We �rst note thatMP = MP1 ∩MP2 = ∅. (57)161

Modeling, Identi�cation and ControlWe need to choose one or more additional joints inorder to guarantee that the manipulator remains equi-librated when joint failure occurs. We will look intotwo di�erent cases. First we choose M14 to be theredundant active joint, then we chose M22 (or equiva-lently M24) and we will see how important this choiceis for fault tolerance of the mechanism.Assume �st we choose M14 as the redundant activejoint (see Figure 2). We then have two di�erent casesthat need to be considered. See From and Gravdahl(2009) for a detailed analysis on the e�ect of joint fail-ure.• One of the active joints in M1 becomes passive:- ∑
MP1fi and card{MP1} increase by onewhile card{MP } does not. M remains equi-librated.
D5 = 0FSJF
====⇒ D4 = 0.
• One of the active joints in M2 becomes passive:- ∑MP2
fi, card{MP2} and card{MP } in-crease by one. The end e�ector of MP hasone degree of freedom (T (y)).D5 = 0
FSJF====⇒ D4 = 1.We can see this if we write out the twists of MP when
M14 is chosen as the redundant actuation and jointfailure occurs in M23:MP1 =
{[vy
0
]}
, (58)MP2 =
{[vz
0
]
,
[p22 × wz
wz
]
,
[p23 × wz
wz
]
,
[p24 × wz
wz
]}
.andMP = MP1 ∩MP2 = T (y). (59)We see that when the actuator redundancy is chosenin M1 the mechanism is fault tolerant with respect tojoint failures in M1 only.For M22/M24 we also consider the same two cases,there is no di�erence if we choose M22 or M24.
• One of the active joints in M1 becomes passive:- ∑MP1
fi and card{MP1} increase by onewhile card{MP } does not. M remains equi-librated.D5 = 0
FSJF====⇒ D4 = 0.
• One of the active joints in M2 becomes passive:
xy
z
M1
M2
M3
Figure 3: Trivial Linkage of Type I.- ∑MP2fi and card{M2} increase by onewhile card{MP } does not. M remains equi-librated.
D5 = 0FSJF
====⇒ D4 = 0.Again we write out the twists of MP when M24 is cho-sen as the redundant actuation and joint failure occursin M23:MP1 =
{[vy
0
]
,
[p14 × wy
wy
]}
,
MP2 =
{[vz
0
]
,
[p22 × wz
wz
]
,
[p23 × wz
wz
]}
. (60)andMP = MP1 ∩MP2 = ∅. (61)We see that when the actuator redundancy is chosenin M2 the mechanism is fault tolerant with respect tojoint failures in all joints.6.2 Trivial Linkage of Type IMechanisms for which all chains generate the samemotion have some special characteristics. First of all,none of the joints are locked due to the kinematic con-straints. Also, a joint fault in one chain which reducesthe mobility of the end e�ector can be compensated forby actuator redundancy in any other chain. The chainsmay be kinematically redundant which is the case for
M3 in Figure 3. As the reasoning is similar to the pre-vious example, we give only a cursory description ofhow to choose the active joints.6.2.1 Equilibrated MechanismAs all chains generate the same motion we have morefreedom in choosing the active joints. All the chains inFigure 3 generateX (z) which gives the end e�ector fourdegrees of freedom. M3 also has one degree of internalfreedom. Hence, we need to choose at least one of the162

From and Gravdahl, �Fault Tolerance�x
y
z
M1
M12
M13
M2
M3
Figure 4: Trivial Linkage of Type I. Bad choice of ac-tive joints. If joint failure occurs in jointM12, the mechanism is no longer equili-brated with respect to forces in the directionof the z-axis, such as gravity forces. JointsM12 and M12 are parallelogram joints thatgenerate motion in S1.joints in the set that generate the self-motion as activeand the other three can be chosen arbitrarily as longas the other degrees of freedom (X (z)\R(z, p3i)) canbe generated.26.2.2 Fault ToleranceAssume that we follow the reasoning from the previousexample and choose the active joints as in Figure 4 with
M12, M22, M23, M33 and M34 active. The motiva-tion for this choice is that internal motion is present inM3, so we need one redundant actuator among thesejoints (M33 and M34). This redundant actuator willalso assure fault tolerance when joint failure occurs injoints in the other chains that generate the same mo-tion, i.e. the intersection of the motions generated bythe redundant actuator and the motion of the faulttolerant joint is non-empty.If, however, joint failure occurs in M12, chain M1can generate a motion in the direction of the z-axis.We have
T (z) ∩M3i = ∅, for i = 2, 3, 4, 5. (62)As the intersection is empty, the redundancy in M3does not make the mechanism fault tolerant with re-spect to joint M12. To guarantee fault tolerance withrespect to all joints, we need actuator redundancy inthe joints that generate motion in this direction as well.This can be obtained by joints M12, M21 or M31. Wethus conclude that, for the mechanism to be fault tol-erant we need two redundant actuated joints.2Loosely speaking, X (z)\R(z, p3i) can be interpreted as themotion X (z) minus the motion of R(z, p3i), for a formal def-inition, see Meng et al. (2007). R(z, p) rotates the point paround the axis z.
6.3 Trivial Linkage of Type IIConsider the manipulator in Figure 5. The chains aredescribed by the twistsM1 =
{[vy
0
]}
, (63)M2 =
{[p21 × wz
wz
]
,
[p22 × wz
wz
]
,
[p23 × wz
wz
]}
,
M3 =
{[p31 × wx
wx
]
,
[p32 × wx
wx
]
,
[p32 × wx
wx
]
,
(Adg3,b3)
[p34 × wz
wz
]
, (Adg3,b4)
[p35 × wz
wz
]}
.Due to the kinematic constraints, R3,b3 and R3,b4 areconstant andM1 ∈ T (y), M2 ∈ PL(z),
M3 ∈ PL(x) ×R(w4) ×R(w5). (64)wherew4 = R3,03wz , w5 = R3,04wz, (65)so that w4 = w5. We then have
MC
1 =
{[vx
0
]
,
[vz
0
]
,
[0
wx
]
,
[0
wy
]
,
[0
wz
]}
,
MC
2 =
{[vz
0
]
,
[0
wy
]
,
[0
wz
]}
,
MC
3 =
{[0
R3,03wy
]}
. (66)Considering the kinematic constraint, the constraintspace of M3 becomes simply MC
3 ={[
0 wy
]T}. Wesee that
MC
3 ⊂ MC
2 ⊂ MC
1 (67)or alternativelyM1 ⊂ M2 ⊂ M3 (68)which is the de�nition of trivial linkage of type II. Thisexpression can be seen from (64) when applying thekinematic constraints.6.3.1 Equilibrated MechanismThe motion of the end e�ector is given by
ME = M1 ∩M2 ∩M3 = M1 = T (y) (69)and has thus only one degree of freedom. M2 has nointernal motion, as can be seen from analysingM1 andM2 in the plane. M1∪M2 has only one degree of free-dom, which is the same as the end e�ector, and has no163

Modeling, Identi�cation and Controlx
y
z
M1
M2
M3
Figure 5: Trivial linkage of type IIself-motion. We can also use (21) (non-overconstrainedmechanisms) with d = 6, N = 4, n = 5 and fi = 1 tosee that M3 allows no internal motion.As the mechanism has mobility one, we need oneactive joint to make the manipulator equilibrated. Thisjoint must generate the motion T (y). From (64) it isclear that all the joints in M1 and M2 generate theend-e�ector motion. If we take a close look at M3, wesee that the three �rst joints generate PL(x). The lasttwo joints in this chain generate R(w4)×R(w5). Thismotion depends on the con�guration of the �rst threejoints. Due to the joint constraints we have θ31 + θ32 +θ33 = 0 and thus w4 = w5 = wz . As
T (y) ∩ (R(p34, wz) ×R(p35, wz)) = ∅ (70)we conclude that these joints are locked.To guarantee that the mechanism is equilibrated wecan choose any joint that generate the end-e�ector mo-tion. The only joints that do not generate this motionis M34 and M35. These joints will always be locked.The mechanism is equilibrated whenever any of theother joints are actuated.6.3.2 Fault toleranceThe same applies to fault tolerance. To guarantee thatthe manipulator remains equilibrated when joint failureoccurs we can choose any joint that generate the end-e�ector motion as the redundant actuation.7 ConclusionA set of rules on how to place redundant actuatorsin parallel mechanisms in order to guarantee that themanipulator remains equilibrated when actuator fail-ure occurs is presented. The manipulator is said tobe equilibrated when the manipulator, considering thepassive joints only, has no mobility. Actuator failurecan be divided into three main classes. The �rst is
when no redundant actuation is needed as the joint forwhich the actuator failure occurs will be locked. Thesecond case is when the actuator failure occurs in aset of joint which generates an internal motion of asub-chain. In this case actuator redundancy must beplaced in this set of joints. When the joint does notgenerate an internal motion and is not locked, actuatorfailure can be compensated by redundancy in any partof the mechanism which is not locked, including a jointthat generates internal motion. In this case the redun-dant joint guarantees fault tolerance also with respectto the joints that generate the self motion. In general,the chosen redundant actuators must, as a group, gen-erate any self-motion and all the components of theend-e�ector motion.AcknowledgementThe authors wish to acknowledge the support of theNorwegian Research Council and the TAIL IO projectfor their continued funding and support for this re-search. The TAIL IO project is an international co-operative research project led by StatoilHydro and anR&D consortium consisting of ABB, IBM, Aker Solu-tions and SKF.ReferencesDai, J. S., H., Z., and Lipkin, H. Mobility of over-constrained parallel mechanisms. Transactions ofASME, 2006. 128.From, P. J. and Gravdahl, J. T. Fault tolerance ofparallel manipulators with passive joints. Submittedto SafeProcess, Barcelona, Spain, 2009.Hervé, J. M. Analyse structurelle des mécanismes pargroupe des déplacements. Mechanism Machine The-ory, 1978. 13(4).Lipkin, H. and Du�y, J. Sir robert stawell ball andmethodologies of modern screw theory. Proc. ofJournal of Mechanical Engineering Science, 2002.216 No 1.Matone, R. and Roth, B. In-parallel manipulators: Aframework on how to model actuation schemes anda study of their e�ects on singular postures. Transof ASME, 1999. 121.Meng, J., Liu, G., and Li, Z. A geometric theory foranalysis and synthesis of sub-6 dof parallel manipu-lators. IEEE Transactions on robotics, 2007. 23, no.4.164

From and Gravdahl, �Fault Tolerance�Murray, R. M., Li, Z., and Sastry, S. A mathematicalintroduction to robotic manipulation. CRC Press,1994.Rico, J., Gallardo, J., and Ravani, B. Lie algebra andthe mobility of kinematic chains. Journal of RoboticSystems, 2003. 20, no. 8.Rico, J. M., Aguilera, L. D., Gallardo, J., Rodriguez,R., Orozco, H., and Barrera, J. M. A more generalmobility criterion for parallel mechanisms. Journalof Mechanical Design, 2006. 128.Tinós, R., Terra, M. H., and Bergerman, M. A faulttolerance framework for cooperative robotic manip-ulator. Control Engineering Practice, 2006. 15:615�625.
165