Embed Size (px)
Citation preview

Mirror tilt immunity interferometrywith a cat’s eye retroreflector
Fabián E. Peña-Arellano* and Clive C. SpeakeSchool of Physics and Astronomy, University of Birmingham, Edgbaston, Birmingham B15 2TT, United Kingdom
*Corresponding author: [email protected]
Received 5 October 2010; revised 28 December 2010; accepted 28 December 2010;posted 4 January 2011 (Doc. ID 136121); published 18 February 2011
This paper describes the behavior of a cat’s eye retroreflector, which is incorporated in a novel way in adouble-pass homodyne polarization interferometer. The amount of mirror tilt immunity a cat’s eye pro-vides is calculated within the paraxial approximation using 4 × 4 ABCDmatrices. It is found that there isa position of the target mirror in which the tilt immunity is at a maximum. A real cat’s eye, which isaffected by aberrations, is optimized and examined using Zemax software for optical design. The max-imum amount of mirror tilt immunity is numerically calculated and written in terms of defocus andspherical aberration. Finally, for the purposes of comparison, the amplitude of the Lissajous patternas the target mirror tilts is calculated for both an interferometer with an integrated cat’s eye and aninterferometer with a cube corner. © 2011 Optical Society of AmericaOCIS codes: 120.3180, 120.4570.
1. Introduction
Interferometers are useful devices, but they are dif-ficult to align. In a Michelson interferometer, for in-stance, the tilt of the mirrors produces straightfringes rather than circular ones. As the tilt in-creases, the fringes become narrower and their den-sity increases, compromising the visibility of theinterference pattern. The maximum tilt for whichthe visibility is not severely compromised corre-sponds to the angle for which the width of thestraight fringes equals the width of the overlappingarea of the interfering beams upon the surface of thedetector. For a single-pass Michelson interferometer,where the mirrors are approximately 54mm awayfrom the photodiode sensing the intensity of the in-terference pattern and the beam is 1:3mm in dia-meter, such an angle is of the order of hundreds ofmicroradians.
Difficulty in aligning these devices can be eased byusing retroreflectors instead of mirrors [1–7]. By de-finition, a retroreflector reflects the light back in thedirection fromwhich it came regardless of its angle of
incidence. The most popular types of retroreflectorsare cube corners and cat’s eyes. A cube corner is con-structed with three mutually perpendicular reflect-ing surfaces. The most common realizations of thecat’s eye consist of a lens with a mirror at the focalplane or a secondary mirror placed at the focal planeof a primary mirror [8,9]. The most significant differ-ence between a cube corner and a cat’s eye is thatwithin a cat’s eye, the light is brought to focus at areflecting surface, while the light going through acube corner is not. In high-power applications, a cubecorner may be more convenient to avoid focusing anintense beam. In polarization interferometry, the useof cube corners should be avoided since the reflec-tions upon its internal faces change the polarizationstate of the light (see [10], p. 87 in [11]), thus, in-creasing the error due to polarization mixing [12].A cube corner appears to be the most frequentlyused type of retroreflector [3–7] since the individualelements that the cat’s eye comprises are affected byaberrations.
In this paper, the cat’s eye retroreflector is intro-duced as a tool for mirror tilt immunity interferome-try. The analysis presented is part of a broadereffort to design an interferometer for measuring
0003-6935/11/070981-11$15.00/0© 2011 Optical Society of America
1 March 2011 / Vol. 50, No. 7 / APPLIED OPTICS 981

the rotations of a spherical superconducting torsionbalance [13,14]. Although the amount of tilt of atorsion balance may be of the order of microradians(Fig. 9 in [13]), depending on the experiment,the cryogenic environment imposes additional con-straints that demand a more robust device thanthe traditional Michelson interferometer. It is vitalto maximize the amount of tilt immunity since thecontraction of the components and their holders dur-ing the process of cooling down could otherwise com-promise the alignment. Furthermore, an optimumamount of tilt immunity also makes possible theuse of holders that do not offer any type of adjust-ment of the position of the optical components, mak-ing the interferometer even more suitable for acryogenic environment. In a future paper, it will bereported how to rearrange the interferometershown in Fig. 8 with the aim of measuring angularmotion [15].
In Section 2, four configurations of the polarizationMichelson interferometer are described. In Section 3,the ability of the cat’s eye retroreflector for providingmirror tilt immunity is examined by means of ABCDmatrices, and, in Section 4, a realization of the cat’seye is analyzed using Zemax software for optical de-sign. Finally, in Section 5, the performances of thecat’s eye retroreflector in a Michelson interferometeris analyzed by means of a numerical calculationusing Zemax.
2. Different Configurations of the MichelsonInterferometer
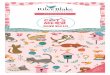
Figure 1 shows four different configurations of thepolarization Michelson interferometer. Figure 1(a)shows the traditional single-pass interferometer inwhich the target and reference objects hold flat mir-rors. A linearly polarized beam propagates into a po-
larizing beam splitter, where the beam is divided intothe two arms of the device. The polarization directionof the light is at 45° with respect to the plane of in-cidence at the polarizing beam splitter, where the ppolarization component is transmitted and the s po-larization component is reflected. After the beamshave sensed the position of the mirrors, they recom-bine at the beam splitter and propagate away towarda set of optical components (not shown in the dia-gram) whose function is to create the interferogramsfrom which the information about the relative posi-tion of the mirrors is extracted. In homodyneinterferometry, these components are usually a non-polarizing beam splitter, a quarter-wave plate, a half-wave plate, and either polarizing filters or polarizingbeam splitters [4,12,16–21]. This interferometer isimmune to lateral displacements of the mirrors,but not to mirror tilts.
Figure 1(b) shows a device in which the mirrorshave been replaced by cube corner retroreflectors[1,4]. Such a replacement does provide some amountof wavefront parallelism that becomes complete im-munity when the cube corner rotates around its no-dal point. The nodal point is the apparent location ofthe apex as seen from outside the glass cube [22]. Inthe case in which the rotation happens aroundany other point, the beam remains parallel to itsoriginal direction, but it is also displaced sideways,decreasing the overlapping area between the inter-fering beams and, therefore, reducing the visibilityof the interferogram. A similar effect is produced ifthe cube corner moves sideways since the beam willmove twice as much as the cube corner in the samedirection. Obviously, this approach requires that thecube corner retroreflector be mounted on the targetobject, a requirement that is not always easy to fulfilland is impossible in some cases.
Fig. 1. Four different configurations of the polarization Michel-son interferometer.
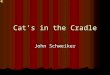
Fig. 2. Misalignment cancellation of the retroreflected beam inthe configurations shown in Figs. 1(c) and 1(d).
982 APPLIED OPTICS / Vol. 50, No. 7 / 1 March 2011

The arrangement shown in Figure 1(c) provides, tosome extent, the advantages of both configurationsshown in Figs. 1(a) and 1(b). It is a double-pass inter-ferometer with only one cube corner in the commonpath of both arms. In this configuration, as in the pre-vious ones, the polarizing beam splitter A divides thelight into the two arms of the interferometer. The ppolarization component is transmitted and the s po-larization component is reflected. The ray, which pro-pagates along the original optic axis, goes throughquarter-wave plate B, while the ray propagatingalong the perpendicular direction goes throughquarter-wave plateD. Both quarter-wave plates havetheir fast axes at 45° with respect to the horizontaldirection, and, thus, the two light beams become cir-cularly polarized. One of the beams is reflected backby mirror C, and the other beam is reflected back bymirror E. As seen from the reference systems thatdescribe the polarization vectors of the beams as theypropagate back after the reflections, the angles thatdescribe the orientation of the fast axes of waveplates B andD are now −45°. The wave plates changethe polarization of both beams back to linear. Thistime, B makes the polarization direction of the lightperpendicular to the plane of incidence at the polar-izing beam splitter A, whileDmakes the polarizationdirection of the light parallel to the plane of inci-dence. The ray propagating along the original opticaxis is now reflected by A, and the other one simplypasses through. After the beams recombine, the lightencounters the retroreflector, which, in this config-uration, is a cube corner, and then is reflected backto polarizing beam splitter A. Beam splitter A trans-mits the horizontally polarized beam and reflects thevertically polarized one. Both beams travel againalong the interferometer arms, and, as before, bypassing twice through their respective quarter-waveplates B and D, their polarization directions accumu-late a new overall change of 90°. When they encoun-ter polarizing beam splitter A for the fourth time, thecomponent traveling along the arm of mirror C istransmitted, while the other one is reflected. Afterthey recombine, the whole beam propagates towardthe detection unit as in the configurations shown inFigs. 1(a) and 1(b). In this configuration, the effect ofboth of the double-pass and the retroreflector is tocancel the misalignment produced by the tilt of anyof the mirrors. Figure 2 depicts a ray (shown as a so-lid line) propagating onto a tilted mirror with an an-gle of incidence ψ i. The ray is reflected with an angleψ r into a direction where a retroreflector (not shown)is placed. When the retroreflected beam (shown as adotted line) encounters the tilted mirror again, theangle of incidence ϕi will be exactly the same asthe angle of reflection ψr. This, in turn, implies thatwhen the retroreflected beam is reflected by the mir-ror again, it propagates away from the mirror withan angle ϕr equal to the initial angle of incidenceψ i. In terms of equations, the relations ϕr ¼ −ψ i,ϕi ¼ −ψr, ψr ¼ ψ i − 2θ, and ϕr ¼ ϕi − 2θ hold, wherethe sign convention is given by Appendix A in [21].
As in the configuration shown in Fig. 1(a), sincethe reflector mounted on the target is a flat mirror,this interferometer is also immune to lateral displa-cements of the object. It is important to notice, how-ever, despite the fact that the outgoing ray is indeedparallel to the original incoming ray after the secondreflection, they do not necessarily overlap. There is alateral relative displacement between the two raysthat results from the light propagating with an anglein between the two reflections on the tilted mirror.
The interferometer shown in Fig. 1(d) employs acat’s eye rather than a cube corner in order to accom-plish mirror tilt immunity. Section 3 is devoted to thecalculation of the lateral displacement between theincoming and outgoing rays in this interferometer.
3. ABCD Matrix Description of a Retroreflector
A. ABCD Matrix of a Retroreflector
The general expression of the ABCD matrix of a re-flector capable of providing mirror tilt immunity in adouble-pass interferometer can be calculated by con-sidering a ray propagating into the retroreflectorfrom the mirror placed at distance d from the retro-reflector, and then back to the mirror. If the ray pro-pagates away from the mirror with a slope yi from apoint at a distance xi from the optic axis, the effect ofthe propagation through the whole system can be cal-culated as the product
rout ¼ ðDdÞðRRÞðDdÞðrinÞ; ð1Þ
where the vectors and matrices
rin ¼�xiyi
�; rout ¼
�xoyo
�; Dd ¼
�1 d
0 1
�;
RR ¼�A B
C D
�; ð2Þ
describe the initial and final states of the ray and theeffect of the propagation through free space andthrough the system under examination, respectively[23]. For simplicity, let us consider C ¼ 0. In such acase, the identity AD − BC ¼ 1 implies that AD ¼ 1and the product [Eq. (1)] becomes
Fig. 3. (Color online) Unfolded propagation diagram of a cat’s eyeretroreflector with a flat mirror. It is a symmetric system.
1 March 2011 / Vol. 50, No. 7 / APPLIED OPTICS 983

rout ¼ ðDdÞðRRÞðDdÞðrÞ ¼24A
�Aþ 1
A
�dþ B
0 1A
35� xi
yi
�:
ð3Þ
From Eq. (3), the value of d that makes the depen-dence of the final displacement xo on the initial slopeyi vanish, is readily calculated as
d ¼ −
AB
A2 þ 1: ð4Þ
This means that all the rays that diverge from apoint on a plane at a distance d from the ABCD sys-tem will converge at one point on the same planeafter the propagation. Such a plane defined byEq. (4) is called the sweet plane. The immunity de-grades as the entrance plane moves away from thesweet plane. If the entrance plane moves away a dis-tance ϵ, the effect of the total propagation [Eq. (3)]becomes
rout ¼�A
�Aþ 1
A
�ϵ
0 1A
��xiyi
�: ð5Þ
From this expression, the condition that yields themaximum amount of immunity to the initial slopeyi is readily calculated by minimizing the quantityAþ 1
A. Such a minimum occurs when A ¼ −1, andthen the total propagation [Eq. (3)] reads
rout ¼�xoyo
�¼
�−1 −2ϵ0 −1
��xiyi
�; ð6Þ
and the condition of mirror tilt immunity [Eq. (4)]becomes B ¼ 2d.
Since yo ¼ −yi, the whole system behaves as a ret-roreflector because the light is reflected back into thesame direction it came from regardless of its angle ofincidence. Furthermore, the unknown ABCD systemis a retroreflector itself:
RR ¼�−1 B0 −1
�; ð7Þ
where the parameter B depends exclusively on theparticular properties of the individual componentsof this system. Notice that B must be always greaterthan zero to fulfill the condition B ¼ 2d.
In the case in which the retroreflector comprises athin lens and a mirror, the mirror must be placed atthe focal plane of the lens in order to obtain a retro-reflecting effect [8]. The particular value of the para-meter B is readily calculated since the refraction by aconvex lens of focal length f is quantified by thematrix
Lf ¼�1 0−
1f 1
�; ð8Þ
the propagation through the distance f between thelens and the mirror is represented by
Df ¼�1 f0 1
�; ð9Þ
and the action of the mirror whose radius of curva-ture is S is described by the matrix
MS ¼�1 02S 1
�: ð10Þ
Notice that S > 0 for a divergent mirror (convex sur-face) and S < 0 for a convergent one (concave sur-face). The expression for a flat mirror is obtainedby making the radius of curvature approach infinityS → ∞. Calculating the overall corresponding propa-gation matrix for this cat’s eye retroreflector takesonly a simple matrix multiplication:
RR ¼ ðLf ÞðDf ÞðMSÞðDf ÞðLf Þ; ð11Þ
which yields the value of the parameter B in thematrix (7):
B ¼
8>>>>><>>>>>:
2f flat mirror;
2
�f þ f 2
jSj
�convex mirror;
2
�f − f 2
jSj
�concave mirror:
ð12Þ
For instance, in the case in which a cat’s eye com-prises a lens and a flat mirror, the condition B ¼ 2dprovides the optimum position of the target mirrorfor achieving the best mirror tilt immunity possible,which is d ¼ f . How well such a condition is fulfilledby the system with a cube corner can be analyzedusing the ABCD matrix of a cube corner given byWang and Ronchi [24] as
CC ¼�−1 −2 h
n0 −1
�; ð13Þ
where h is the length of the cube corner from the en-trance face to the apex and n is the index of refractionof the glass. In this case, B ¼ −2 d
n is always negative,and, therefore, the condition B ¼ 2d can never be ful-filled. The mirror tilt immunity that the cat’s eye canprovide will always be better than the one providedby the cube corner in the configurations shown inFigs. 1(d) and 1(c), respectively.
B. Mirror Tilt Immunity Provided by the Cat’s Eye
The effect of the tilt of the mirror can be quantita-tively taken into account by means of the aug-mented 4 × 4 ABCD matrices for misaligned opticalcomponents given by Wang and Ronchi [24]. As it
984 APPLIED OPTICS / Vol. 50, No. 7 / 1 March 2011

is shown in [21], if the parameters describing the po-sition and the slope of the incident beam onto thetilted mirror are xi and yi, respectively, the corre-sponding parameters xo and yo describing the out-going beam are
xo ¼ −xi þ ðyi − 2θÞðBrr − 2dÞ; ð14Þyo ¼ −yi; ð15Þ
where θ is the tilt angle of the mirror and Brr is thegeneric parameter B in Eq. (7).
The system comprising the tilted mirror and theretroreflector works as a whole as a retroreflector.The slope of the outgoing beam yo does not dependat all on the tilt angle θ and its value is yo ¼ −yi. How-ever, the distance xo from the optic axis to the beamdoes depend on the tilt angle θ. From Eq. (14), it isalso possible to notice that the displacement xo pro-duced by having the target mirror misaligned is nullif Brr ¼ 2d. When this condition is fulfilled, the dis-placement xo does not depend on the tilt angle θ orthe angle of incidence yi. To explain this statementon intuitive grounds, let us consider the particularcase in which the cat’s eye comprises a thin lensand a flat mirror. As noted earlier, the conditionBrr ¼2d and the corresponding value of Brr [Eq. (12)] for aflat mirror imply that d ¼ f . Figure 3 shows the un-folded ray-tracing diagram for the retroreflector withthe target mirror placed at the focal plane of the lens.Let us imagine that only one incident ray (not pic-tured in the figure) reaches the mirror from the leftat point P1. Each of the rays diverging from P1 intothe retroreflector could be regarded as the reflectionof such a ray for different tilt angles of the mirror.Because the rays diverge from a point placed at thefocal plane, they all propagate parallel to each otherwithin the retroreflector. Therefore, after they are re-fracted by the lens again they all converge onto thesame point P2 at the focal plane where the mirror isplaced. So far, this explains the independence of theoutgoing beam displacement xo from the tilt angle θwhen the mirror is placed at the focal plane of thelens. The same argument may be used to prove that,under the same conditions, xo does not depend on theangle of incidence yo either. Indeed, it is only neces-sary to consider that many incident rays reach pointP1 from the left from many different directions, andthat the rays that diverge from P1 represent thereflection of those beams for only one tilt angle ofthe mirror.
The complete independence of the displacement xofrom both angles θ and yo can only be achieved be-cause a cat’s eye produces a real image of any objectplaced in front of it. The sweet plane defined by thecondition Brr ¼ 2d is the place where the plane of thereal image coincides with the plane of the source ob-ject itself. This amount of mirror tilt immunity is im-possible to achieve with a cube corner because such aretroreflector does not produce real images, but onlyvirtual ones. As can be seen in Fig. 4, after the raysare retroreflected by the cube corner, they continuediverging and never reach the same point again. Itis important to notice that since the points P1 andP2 are conjugate in a cat’s eye, the optical path lengthof any ray propagating between the two points is thesame regardless of the trajectory of the individualray. Therefore, the mirror tilt immunity does not re-fer only to the fact that the beam does not displace atall as the mirror tilts, but also to the fact that theoptical path length does not change either.
In the case in which the mirror is not placed at thesweet plane, the optical path length can be calculatedusing thematrix form of Eq. (14) given in [21] and theEikonal equation given by [24]. If the distance fromthe mirror to the sweet plane of the cat’s eye is s, theEikonal equation yields
L ¼ L0 − 4sθ2 þ sy2i ; ð16Þ
where L0 is the optical path length along the opticaxis. From Eq. (16), it follows that, when s ¼ 0, theoptical path length does not depend on the tilt ofthe mirror.
Fig. 4. Cube corners produce virtual images of objects. Forsimplicity, refraction at the entrance face of the cube corner wasnot considered in the diagram.
Fig. 5. (Color online) (a) Afocal and (b) focal configurations of thecat’s eye retroreflector with a flat mirror.
1 March 2011 / Vol. 50, No. 7 / APPLIED OPTICS 985

Equation (16) is also valid for the system with thecube corner. The value of the parameter s is the dis-tance from the mirror to the apparent position of theapex of the cube corner as seen from the mirror. Therefracting effect of the quarter-wave plate and the po-larizing beam splitter must be taken into accountwhen calculating this position.
4. Real Cat’s Eye
Any realization of a cat’s eye retroreflector will be af-fected by aberrations. The properties of all the com-ponents of a cat’s eye must be such that the totalamount of aberrations in the retroreflected beammust be always below the diffraction limit. The opti-cal system presented in this section was optimizedand analyzed using Zemax software for opticaldesign.
Retroreflectors are afocal systems. A collimatedbeam propagates into the system and a collimatedbeam propagates away in the same direction fromwhich the incident beam came. An appropriate figureof merit for assessing the performance is the peak-to-valley wavefront distortion of the outgoing planewave, which must be below the diffraction limit.However, the cat’s eye retroreflector described inSection 3 is also intended for providing immunityto mirror tilts in an interferometer. A figure of meritof howwell a cat’s eye performs this taskmust be alsoincluded in the optimization procedure. In terms ofthe paraxial approximation, how this immunity isachieved is illustrated in Section 3 by means ofthe unfolded propagation diagram (Fig. 3), and theoptical path length accumulated in going from pointP1 to point P2 is written as Eq. (16). In Fig. 3, everydepicted ray is the reflection of one single ray for dif-ferent tilt angles of the mirror. Since all those raysconverge into the same point P2, the quality of theimage point can be used as a figure of merit forthe ability of the retroreflector to provide mirror tiltimmunity. Because this system is intended to be usedin an interferometer, the peak-to-valley wavefrontdistortion of the spherical wavefront is a betterchoice than the rms radius of the image spot com-monly used in imaging systems.
The system must be optimized using a beam ofrays rather than individual rays. Every single ray be-longs simultaneously to two configurations, one focaland one afocal. Each focal configuration describes themisalignment of a single ray as the mirror rotatesaround the point of reflection of that ray. The opticalpath length difference between one real ray and itsparaxial counterpart contributes equally to the aber-rations in both configurations. The only distinctionbetween the two quantities is the reference wave-front from which this optical path length differenceis considered. It should be possible, in principle, tocalculate for how much one ray is aberrated in oneconfiguration, if its aberrations in the other config-uration and the optical path length difference be-tween the two reference wavefronts are known.
An ideal reference wavefront is always tangent tothe point of intersection of the exit pupil and the chiefray, with its center of curvature coincident withthe ideal image point. Figure 5 shows the afocal(Fig. 5(a)) and focal (Fig. 5(b)) configurations to whichone particular ray belongs. In both diagrams, the rayis shown as a black solid curve and propagatesthrough the system from point P1 to point P2. Thedashed curves represent other rays that belong toeither configuration but not to both. In the afocal con-figuration, the aperture stop is located at the en-trance plane, which is the plane of the mirror. Theentrance pupil is, therefore, located at this sameplane, and the exit pupil coincides with the imageplane. The chief ray is shown as a dotted–dashedcurve that goes from point Q1 to point Q2. The refer-ence wavefront W is shown tangent to point Q2, withits center of curvature at infinity, where the ideal im-age is located. In the focal configuration, the chiefray, which is shown as a dotted–dashed curve propa-gating from point P1 to point P2, is parallel to the op-tic axis and corresponds to the case in which themirror is not misaligned. The symmetry of the cat’seye retroreflector implies that the chief ray is retro-reflected also parallel to the optic axis. The system isthen double telecentric where the entrance and exitpupils are at infinity in object and image spaces re-spectively, and the aperture stop is therefore located
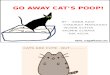
Fig. 6. (Color online) Optimized cat’s eye retroreflector. The optics are 5mm in size.
986 APPLIED OPTICS / Vol. 50, No. 7 / 1 March 2011

at the focal plane within the retroreflector. At pointP2, the ideal wavefront is the ideal image point itself.
Since the exit pupil in the focal configuration islocated at infinity, it is more convenient to write aformal expression of the aberrations in the focal con-figuration Wf ðh; θÞ in terms of the aberrations in theafocal configuration Waðh; θÞ at its exit pupil plane,where h is the coordinate of the ray at this pupiland θ is the tilt angle of the mirror. Such an equationis
Wf ðh; θÞ ¼ Waðh; θÞ þΔCðh; θÞ; ð17Þ
where Wf ðh; θÞ ¼ OPLf −OPL, Waðh; θÞ ¼ OPLa−
OPL, ΔC ¼ OPLf −OPLa, and OPL, OPLa, andOPLf are the optical path lengths of the aberratedray and the chief rays in the afocal and focal config-urations, respectively. The optical path length differ-enceΔC is subject to aberrations as well, and it mustbe calculated using real rays. The paraxial contribu-tion to this quantity, however, can be easily calcu-lated using Eq. (16) as ΔCparaxial ¼ 4sθ2 − sy2i ,where OPLa ¼ L and OPLf ¼ L0.
A consequence of Eq. (17) is that whatever techni-que is used to optimize the system in one configura-tion will also optimize the performance of the systemin the other configuration. Thus, a cat’s eye retrore-flector can be optimized, for instance, using the afo-cal configuration only, and it should be expected thatif the position of the mirror is an optimization vari-able, the mirror will be automatically located at thesweet plane.
Figure 6 shows a cat’s eye optimized for light at awavelength of 1550:9nm. Figure 6(a) shows the afo-cal configuration, and Fig. 6(b) shows the focal one.Although, in principle, for every ray traced in an afo-cal configuration there must be a focal configuration,in practice, only three fields were taken into accountin each configuration. In the afocal ones, three colli-mated beams propagate into the retroreflector, oneparallel to the optic axis and two at �2:5°, shown
in Fig. 6 as different types of curves. The radius ofthe beam is 0:65mm, and the apodization is uniform.In the focal configurations, three point sources werelocated at the optic axis and at �0:65mm away fromit, at points b, a, and c, respectively. The entranceplane E is at the sweet plane where the mirror mustbe in the real physical system. Although the cat’s eyecomprises only the lens L and the mirror M, in orderto be able to use the cat’s eye in a double-pass inter-ferometer [25], a polarizing beam splitter cube P anda quarter-wave plate Q must also be taken into ac-count (see Section 5). The aspheric lens L is a com-mercial product distributed by Thorlabs (ElyCambridgeshire, UK, part number AL1210). Themirror M is the coated convex face of the lens (Thor-labs, part number LA4249).
Figure 7 shows the rms wavefront error as a func-tion of the field coordinate of both configurations inunits of wavelength and with respect to the principalray for each field. The performance of the afocal con-figuration is diffraction limited. The aberrations af-fecting the focal configuration actually define thereal limits to the mirror tilt immunity. In terms ofFig. 3, in the paraxial approximation, P1 and P2are conjugate points, and the optical path length be-tween the two points is always the same regardless ofthe amount of the tilt of the mirror θ. However, in thereal cat’s eye, the aberrations introduce optical pathlength differences between the different rays travel-ing between P1 and P2. An interferometer would beable to measure those differences as the mirror ro-tates if the signal produced is greater than the noisein the system.
Fig. 7. Root-mean-square wavefront error in waves with respectto the principal ray for both configurations.
Fig. 8. Cat’s eye retroreflector within a homodyne polarizationinterferometer. A, laser; B, E, and K, polarizing beam splitters;C, beam splitter; D, half-wave-plate; F, F0, quarter-wave-plate;G, G0, mirrors; H, aspheric lens; I, mirror; J, quarter-wave plate;P1, P2, and P3, photodiodes.
1 March 2011 / Vol. 50, No. 7 / APPLIED OPTICS 987

As can be seen in Fig. 7, the rms wavefront errorfor the focal configuration decreases as the fieldcoordinate increases. This is a consequence of theoptimization procedure compensating the sphericalaberration and astigmatism with defocus with theaim of minimizing the merit function [see Fig. 6(b)].As is seen in Section 5, the optimization procedureintroduces an extra optical path length in order tominimize, in the average, the spherical aberrationand astigmatism at the sweet plane by moving thesource and image planes (the mirror) away fromthe paraxial focal plane of the retroreflector. Sucha cancellation is more effective for larger field coor-dinates, where the rays are more affected by thespherical aberration, leaving only the unbalanced de-focus as the dominant wavefront error for rays closerto the optic axis.
5. Interferometer with Mirror Tilt Immunity
The goal of this section is to describe what the actualinterferometer measures as the target mirror tilts.Although it would be useful to relate the aberrationspresent in the afocal configurations with what theactual interferometer measures, the afocal config-urations are still an approximation to the real sys-tem. In the interferometer, the rotation takes placearound a point located on the optic axis. However, inevery afocal configuration, the mirror is assumed torotate around its corresponding point source, which,with one exception, is not located along the opticaxis. The optimization procedure also takes into ac-count simultaneously afocal configurations whosepoint sources are located at different distances fromthe axis.
Figure 8 shows a diagram of the interferometer.This device achieves displacement measurementsusing reversible fringe counting with three interfer-ence patterns, whose intensities are measured byphotodiodes P1, P2, and P3. Using reversible fringecounting, it is possible to measure displacements lar-ger than a quarter of a wavelength in a double-passinterferometer without any ambiguity when the in-
terference pattern reaches either a maximum orminimum intensity [4,12,16–21]. The first compo-nent that the light encounters is polarizing beamsplitter B. The light whose electric field is perpendi-cular to the plane of incidence is reflected and lost(not shown in Fig. 8), and the light whose electricfield is parallel to the same plane is transmitted intothe rest of the interferometer. The following elementin the path is beam splitter C. The transmitted beamis lost (not shown), and the reflected one propagatesfurther onto half-wave plate D. The fast axis of thewave plate is oriented at 67:5° with respect to thehorizontal direction, and, thus, the polarization di-rection of the light changes to be 45° with respect tothe same direction. The next component, polarizingbeam splitter E, divides the light into two beams ofequal intensity that propagate along the arms of theinterferometer. The beams sense the position ofthe target and reference mirrors twice by means ofthe cat’s eye retroreflector, as described in Section 1.After the two beams recombine at polarizing beamsplitter E, the light subsequently propagates againonto half-wave plate D. The polarization directionsof the perpendicular components of the electric fieldchange again by 45°. The beam splitter C divides thelight into two beams. The transmitted beam reacheswave plate J and, later, polarizing beam splitter K,where two interferograms are created. The intensi-ties of the interferograms I2 and I3 are measuredby photodiodes P2 and P3, respectively. The reflectedbeam at C propagates to polarizing beam splitter B,where another interferogram is created upon reflec-tion. The intensity of the interferogram I1 is mea-sured by photodiode P1. Ideally, I1 should be inquadrature with respect to I2 and I3, which shouldbe in phase opposition with respect to each other.However, this condition depends on the phase intro-duced by beam splitter C and the retardance of waveplate J [12,21].
It is important to point out that relating what theinterferometer measures directly with the aberra-tions in the afocal configurations is not a straightfor-ward task. The interferometer employs a Gaussianbeam and not just one single ray. Each of the threeoutput intensities of the interferometer is the resultof the interference of two Gaussian beams whosewavefronts are not uniform across the beams due tothe aberrations. Furthermore, when the mirror is notin the vicinity of the sweet plane, one of the beamsdisplaces with respect to the other one as the mirrorrotates. In practice, the intensities are calculated bytracing 200,000 rays with a Gaussian intensity pro-file. The photodiodes are 3:2mm × 3:2mm in sizewith a resolution of 200 × 200 pixels. The intensityat each pixel is calculated by considering the interfer-ence of all the rays that arrive to that pixel, and thetotal intensity at each photodiode is calculated byadding together the intensities at all of its pixels.The quantities I2 − I1 and I3 − I1 represent the ab-scissa and ordinate of a point in an ideally circularLissajous pattern centered at the origin. As the
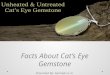
Fig. 9. (Color online) Optical path difference measured by the in-terferometer when the mirror rotates around the sweet spot. Theabscissa is the normalized pupil coordinate of the chief ray of theGaussian beam.
988 APPLIED OPTICS / Vol. 50, No. 7 / 1 March 2011

optical path length changes, the point moves fromone point to another along the Lissajous pattern, andthe displacement can be calculated according to theformula
d ¼ 14
� λ2π
�arctan
�x1y2 − x2y1x1x2 þ y1y2
�; ð18Þ
where ðx1; y1Þ and ðx2; y2Þ are the coordinates of thetwo points.
Figure 3 provides a qualitative idea of what the in-terferometer measures as the mirror rotates. The dif-ferent rays propagating away from point P1 areshown in different types of curves in order to pointout the symmetry of the system. The five depictedrays accumulate different optical path lengths asthey propagate from point P1 to the focal plane Rin between the lenses. As they propagate from theplane R to the point P2, each ray travels the sameoptical path length as the optical path length tra-veled, from P1 to R, by the ray symmetrically placedon the other side of the principal ray, shown in black.For instance, the ray d travels, fromR to P2, the sameoptical path length as the ray e travels from P1 to R.The symmetry also implies that the optical pathlength that the ray e travels from R to P2 equalsthe optical path length that the ray d travels fromP1 to R. Similar relations exist for every pair of rayssymmetrically placed on the sides of the principalray. Therefore, regardless of the position of a raywithin the Gaussian beam, the optical path lengthtraveled by the ray must be a symmetric functionof the tilt angle of themirror. Therefore, it is expectedthat the measurement provided by the interferom-eter is an even function of the tilt angle. It is worthnoticing that such a symmetry holds only when theaberrations are small. If the image created at P2 isnot small enough, the optical path lengths traveledby the rays during the second pass cannot be ex-pected to be close in value to those in the first pass.
Figure 9 shows a plot of the optical path length dif-ference measured by the interferometer when themirror tilts around the sweet spot. With the excep-tion of the black solid curve, which represents thedata produced with a Gaussian beam, all the graphsare produced by tracing individual rays. The opticalpath length difference is considered with respect tothe ray or beam that propagates when the mirroris not misaligned. The coordinate z that describeseach ray is the distance from the ray to the optic axisas the ray propagates onto the mirror parallel to theaxis. The abscissa is the normalized entrance pupilcoordinate of the chief ray of the Gaussian beam cal-culated as
ρ ¼ tan2θtan 2:5°
; ð19Þ
where θ is the tilt angle of the mirror. It is importantto notice that even the data for the individual rays isplotted as a function of the pupil coordinate of the
chief ray of the Gaussian beam. The plots are sym-metrical and can be characterized by the function
WðρÞ ¼ Cρ2 þ Aρ4; ð20Þwhere C represents defocus and A representsspherical aberration. Unlike the system shown inFig. 6(b), in which there is astigmatism due to thepoint sources a and c not being on axis, the systemwith the Gaussian beam on axis is not affected by as-tigmatism due to the axial symmetry. The coeffi-cients C and A can be found by a linear leastsquares fit to calculated data.
The paraxial limit provides a model of how the de-focus varies as themirror moves away from the sweetplane. In such a limit, Eq. (20) can be written as
WðρÞ ¼ Cρ2 þ Aρ4 ≈
4C
ðtan2:5°Þ2 θ2: ð21Þ
Comparison of Eq. (16) with yi ¼ 0 yields theexpression
C ¼ −ðtan 2:5°Þ2�sþ df
λ
�; ð22Þ
where the term df has been included in order toquantify the distance between the sweet planeyielded by the optimization procedure and the para-xial sweet plane. The predicted value of the slope ismp ¼ −ðtan2:5°Þ2=λ ¼ −1:229mm−1. The solid curvein Fig. 10 shows the calculated value of C as a func-tion of the distance s from the mirror to the sweetplane. The parameter s is negative when the mirroris closer to the interferometer than the sweet planeand positive when it is further away. A linear leastsquares fit yields the value of the slope as mLSF ¼ ð−1:228� 3:275 × 10−4Þmm−1. The maximum discre-pancy between the predicted and the calculatedvalues of the slope can be estimated as mp − ðmLSF−
ΔmLSFÞ, whereΔmLSF ¼ 3:275 × 10−4 mm−1, yieldinga value of 1:325 × 10−3 mm−1, which is negligible com-pared with either the calculated or the predicted va-lue of the slope. The least squares fit value of theactual defocus at the sweet plane is df ¼ ð304�1:727Þ × 10−3 mm. This is the distance from the realsweet plane to the paraxial sweet plane.
Figure 10 also shows the value of the sphericalaberration coefficient A as a dashed curve. At thescale shown, and compared with the value of the de-focus coefficient C along the whole range, the coeffi-cient A is constant. At the sweet plane at s ¼ 0, C andA are approximately equal in absolute value butopposite in sign. This is a consequence of the optimi-zation procedure compensating the spherical aberra-tion and astigmatism with defocus [see Fig. 6(b)] inorder to minimize the optical path length changethat the interferometer measures as the mirrorrotates.
The spherical aberration sets the real limit to theability of the cat’s eye retroreflector to provide
1 March 2011 / Vol. 50, No. 7 / APPLIED OPTICS 989

immunity to mirror tilts. For instance, according tothe graph in Fig. 9, the maximum optical path lengthchange that the interferometer measures as the mir-ror tilts at the sweet plane is Wmax ¼ 0:11λ=4 ¼43:77 × 10−9 m. This is still large compared with thelimit that the shot noise sets with an initial incomingbeam intensity of approximately 24:6 μW, which isapproximately 1:14 × 10−14 m=
ffiffiffiffiffiffiffiHz
p[21]. The aberra-
tion limit can, nevertheless, be reduced by improvingthe optical design.
Finally, Fig. 11 shows the mirror tilt immunity ofthe device from the standpoint of the amplitude ofthe Lissajous pattern for both retroreflectors, thecat’s eye and the cube corner [see Figs. 1(c) and 1(d)].The amplitude was calculated by displacing themirror by a quarter of a wavelength at different dis-tances s from the sweet plane for different amountsof tilt. As in Fig. 10, the parameter s is negative whenthe mirror is closer to the interferometer thanthe sweet plane and positive when it is further away.The displacement would produce one rotationaround the Lissajous pattern, and the amplitude ofthe circle was calculated with a linear least squaresfit to the calculated data. This result is a measure ofhow much the Gaussian beam moves away from theoptic axis but still parallel to it as the mirror tilts. Asdiscussed in Section 3 with Figs. 3 and 4, a cat’s eyeprovides a larger tilt immunity than a cube cornersince the former produces real images and the latteronly virtual ones.
A cat’s eye also has the advantage that its polari-zation effect is small, if not negligible. Unlike a cubecorner, a cat’s eye does not require large angles of in-cidence on the surfaces of the optical components inorder to achieve its retroreflecting effect. For theparticular cat’s eye described earlier, the largestcontribution to the phase change between the per-pendicular components of the electric field of the ret-roreflected light is introduced by the reflection on themirror, where the angles of incidence are a maximumof 3:77°. The overall polarization effect at the exitpupil is easily calculated with Zemax using Fresnel
equations, yielding a phase change between −0:065°and 0:065°, depending on the values of the exit pupilcoordinates.
6. Conclusions and Future Work
The mirror tilt immunity that a cat’s eye retroreflec-tor provides in a double-pass homodyne polarizationinterferometer is examined. By means of 4 × 4 ABCDmatrices, an analytic expression of the misalignmentof the beam as the target mirror tilts is calculated[Eq. (14)]. It is found that there is a position of thetarget mirror, the sweet plane, in which the tilt im-munity is at its maximum. Furthermore, at the sweetplane, the optical path length change introduced asthe mirror tilts is null [Eq. (16)].
A real cat’s eye, which is affected by aberrations, isdesigned with optics from stock and optimized withZemax. Although as an afocal retroreflector the cat’seye designed is diffraction limited (Fig. 7), as part ofthe interferometer (Fig. 8), the mirror tilt immunityit provides at the sweet plane is limited by sphericalaberration, with a maximum error of 43:77nm with-in the mirror tilt range considered between −1:25°and 1:25°. The optical path length introduced bythe tilt for different positions of the mirror with re-spect to the sweet plane is written in terms of defocusand spherical aberration [Eqs. (20) and (22)], and theamount of these aberrations is numerically calcu-lated using real ray tracing (Fig. 10).
Also, as part of the interferometer, this retroreflec-tor can maintain the alignment of the interferingbeams for a mirror tilt of at least �1:25°. The ampli-tude of the Lissajous pattern decreases 5.3% for a tiltof �1:25° at the sweet plane and 45.5% for the sametilt when the mirror is þ6mm away from the sweetplane (see Fig. 11).
From the point of view of the design, the toleranceanalysis must still be made. Future work also in-cludes reporting the experimental realization of a
Fig. 10. Parameter C follows a linear dependence with s as pre-dicted by the paraxial approximation [see Eq. (22)]. Comparedwith the defocus, the spherical aberration remains constant.
Fig. 11. (Color online) From the standpoint of the amplitude ofthe Lissajous pattern, a cat’s eye provides a better mirror tilt im-munity than a cube corner. Parameter s is the distance from themirror to the sweet plane. It is negative when the mirror is closerto the interferometer than the sweet plane and positive when it isfurther away.
990 APPLIED OPTICS / Vol. 50, No. 7 / 1 March 2011

version off axis of the interferometer shown in Fig. 7[26] and the application of the cat’s eye for interfero-metric angular motion measurement [15].
We appreciate the suggestions given by ArmandoGómez Vieyra from the Centro de Investigaciones enÓptica in León, Gto., Mexico. The work reported inthis article is subject to International patent pub.no. WO 2009/010750 A1[27].
References1. E. R. Peck, “Theory of the corner-cube interferometer,” J. Opt.
Soc. Am. 38, 1015–1024 (1948).2. P. Hariharan and D. Sen, “The separation of symmetrical and
asymmetrical wave-front aberrations in the Twyman interfe-rometer,” Proc. Phys. Soc. London 77, 328–334 (1961).
3. S. J. Bennett, “A double-passed Michelson interferometer,”Opt. Commun. 4, 428–430 (1972).
4. M. J. Downs and K W. Raine, “An unmodulated bi-directionalfringe counting interferometer system for measuring displace-ments,” Precis. Eng. 1, 85–88 (1979).
5. M. J. Downs and J. W. Nunn, “Verification of the sub-nanometric capability of an NPL differential plane mirror in-terferometer with a capacitance probe,” Meas. Sci. Technol. 9,1437–1440 (1998).
6. P. de Groot, “Jones matrix analysis of high-precision displace-ment measuring interferometers,” in ODIMAP II (Pavia,1999), pp. 9–14.
7. H. J. Büchner and G. Jäger, “A novel plane mirror interferom-eter without using corner cube reflectors,” Meas. Sci. Technol.17, 746–752 (2006).
8. J. J. Snyder, “Paraxial ray analysis of a cat’s-eye retroreflec-tor,” Appl. Opt. 14, 1825–1828 (1975).
9. M. L. Biermann, W. S. Rabinovich, R. Mahon, andG. C. Gilbreath, “Design and analysis of a diffraction-limitedcat’s-eye retroreflector,” Opt. Eng. 41, 1655–1660 (2002).
10. S. E. Segre and V. Zanza, “Mueller calculus of polarizationchange in the cube-corner retroreflector,” J. Opt. Soc. Am. A20, 1804–1811 (2003).
11. J. Dyson, Interferometry as a Measuring Tool (The MachineryPublishing Company, 1970).
12. F. Petrů and O. Čip, “Problems regarding linearity of data of alaser interferometer with a single-frequency laser,” Precis.Eng. 23, 39–50 (1999).
13. G. D. Hammond, A. Pulido Patón, C. C. Speake, andC. Trenkel, “Novel torsion balance based on a spherical super-conducting suspension,” Rev. Sci. Instrum. 75, 955–961(2004).
14. G. D. Hammond, C. C. Speake, A. J. Matthews, E. Rocco, andF. E. Peña-Arellano, “Development of a second generation tor-sion balance based on a spherical superconducting suspen-sion,” Rev. Sci. Instrum. 79, 025103 (2008).
15. F. E. Peña-Arellano, C. C. Speake, H. Panjwani, andL. Carbone “An interferometer for measuring angular mo-tion,” in preparation.
16. E. R. Peck and S. W. Obetz, “Wavelength or length measure-ment by reversible fringe counting,” J. Opt. Soc. Am. 43,505–509 (1953).
17. P. L. M. Heydemann, “Determination and correction of quad-rature fringe measurements errors in interferometers,” Appl.Opt. 20, 3382–3384 (1981).
18. K. W. Raine and M. J. Downs, “Beam-splitter coatings forproducing phase quadrature interferometer outputs,” J.Mod. Opt. 25, 549–558 (1978).
19. V. Greco, C. Iemmi, S. Ledesma, G. Molesini, and F. Quercioli,“Multiphase homodyne interferometry: analysis of some errorsources,” Appl. Opt. 34, 2207–2213 (1995).
20. M. A. Zumberge, J. Berger, M. A. Dzieciuch, and R. L. Parker,“Resolving quadrature fringes in real time,” Appl. Opt. 43,771–775 (2004).
21. F. E. Peña-Arellano, “Characterization of polarization homo-dyne interferometers,” Ph.D. dissertation (University ofBirmingham, 2008).
22. N. Bobroff, “Recent advances in displacement measuringinterferometry,” Meas. Sci. Technol. 4, 907–926 (1993).
23. F. Pedrotti and L. Pedrotti, Introduction to Optics (Prentice-Hall, 1996).
24. S. Wang and L. Ronchi, “Principles and design of opticalarrays,” Prog. Opt. 25, 279–310 (1988).
25. C. C. Speake and S. M. Aston, “An interferometric sensorfor satellite drag-free control,” Class. Quant. Grav. 22,S269–S277 (2005).
26. F. E. Peña-Arellano, C. C. Speake, and S. M. Aston are prepar-ing a manuscript to be called “Experimental realization of aninterferometer with mirror tilt immunity.”
27. C. C. Speake, S. M. Aston, F. E. Peña-Arellano, andT. P. E. Copland, “Improved interferometer,” Internationalpatent, pub. no. WO 2009/010750 A1 (22 January 2009).
1 March 2011 / Vol. 50, No. 7 / APPLIED OPTICS 991