Embed Size (px)
Citation preview

Miniature UAV’s &Future Electronic Warfare
Dr Anthony FinnDr Kim Brown
Dr Tony LindsayEW & Radar Division
DSTO, Edinburgh, SA 5111
AbstractA capable adversary will use a combinationof SAR, ISAR, early warning, and MTIradars, as well as EO, IR, and ESM sensorsnetworked together using tactical data linksto provide a complete situational awarenesspicture. For a small defence force such asthe ADF, which has historically dependedupon a few high value assets to act as forcemultipliers, this means that its platformswill be difficult to conceal andcommensurately easy to target. In order toprotect against this we are undertaking aresearch project aimed at prosecuting anEW campaign through the use of small,inexpensive, autonomous, cooperative airvehicles. This combination of attributesprovides a capability that, even if it ispossible for an adversary to target theindividual vehicles, due to the distributed,autonomous, adaptive, and robust nature ofthe system it is difficult to countereffectively.
The current program focuses on thelocation and suppression of targets such asradars through the use of a geographicallydistributed and heterogenous mix of sensorsthat are autonomous and capable ofcooperative behaviour. The individualsensors are relatively unsophisticated,
however, the observation system that iscreated through the cooperation andadaptive networking of these sensorsprovides sufficient process gain to achieveresults similar to those of significantly moreexpensive centralised systems, but withthe added advantage of achievingrobustness to an adversary's counter-measures whi ls t s imul taneous lymaintaining operational capability at areduced cost.
The program comprises a trials programthat uses the Australian-made AerosondeUAV, the study of team formation,distributed sensing, data fusion, sensorresource and energy management, andcommunication link control based on theconcept of cooperating machines, thedevelopment of intelligent agent algorithmsbased on the self-organising behaviourobserved in ant colonies, and theimplementation of these algorithms within asimulation environment.
UAV's can contribute in all aspects ofElectronic Warfare, from jamming andSuppression of Enemy Air Defence(SEAD) to Electronic Support Measures(ESM), and Signals Intelligence (SIGINT).The inherent range advantages enjoyed byEW/ES payloads make them the naturalsensor of choice for cross-cueing payloadswith shorter ranges and/or more restrictedfields of view such as SAR or EO/IRsensors. EW fits for UAVs can also includeSIGINT payloads, or defensive sensors thatcan perform a SIGINT role. For example, aRadar Warning Receiver (RWR) can be asource of vital information, particularlywhen related to imagery information toform a more complete or accurateSituational Awareness picture or whenupdating the Electronic Order of Battle. Thekey is the integration of the inputs from allof the vehicle's sensors or all of the sensorson all of the vehicles, in the case of smallermore distributed systems that use aheterogenous mix of sensors.

1. IntroductionElectronic Warfare (EW) is vital to all typesof military operation. The ADF’s capacityto identify, characterise, locate, exploit, andsuppress the electromagnetic emissions ofan adversary is crucial to this objective as itallows for the establishment and mappingof the adversary’s electronic order of battle.In particular, integrating EW information(which often includes ID and intent) withsurveillance and imagery data (which doesnot) provides a very much more completesituational awareness (SA) picture.Unfortunately, all too often EW is over-looked - until the shooting starts.
Unmanned Aerial Vehicles (UAV’s) have avital role to play in the prosecution of EWcampaigns. Similarly, EW has a vital role toplay in the protection of UAV’s. To exploitthis synergistic relationship we need tomake use of the latest miniaturised EWequipment. For example, a communicationsjammer or an Electronic Surveillance (ES)receiver can supplement or even replace aUAV’s main payload. An EW module suchas a Radar Warning Receiver (RWR) canalso be used to provide the UAV with someadvance threat warning. Alternatively, theUAV and its payload can form some part ofa higher-level total capability.
This paper discusses:a) Issues relevant to the physical andelectromagnetic vulnerabilities of UAV’s,b) The potential for EW payloads tosimultaneously enhance the capabilities andreduce the vulnerabilities of these UAV’s,c) The potential applications of smallerUAV’s in an EW campaign.
The paper also describes a DSTO programof work that is exploring the trade-offsbetween the larger, more sophisticated,platform-centric UAV/payload options andthe smaller, cheaper, distributed, networkcentric options that are available.
2. UAV VulnerabilitiesIn Afghanistan the UAV’s appear to haveachieved excellent results for few losses.However …• Our adversaries are not blind to this,• The opposition in Afghanistan do/did nothave access to sophisticated air defences;• When the ADF goes up against a morecapable adversary the UAV’s will attract agreat deal of unwelcome attention;• Shoot-downs may not result in loss-of-lifeor hostages, but they do represent loss ofopportunity and expenditure of resources;• There are very few political ramificationsfor an adversary destroying one of theseUAV’s should the level of hostilities be lessthan open conflict;• EO/IR payloads are effectively blinkeredby their narrow fields of view;• The cost of the airframe is relatively high,slow and relatively easy to target, but notsufficiently expensive enough to merit theinclusion of capable EW self-protectionsystems;• This leaves the UAV’s vulnerable to 30-40 year old SAM technologies (UAV lossesduring the Kosovo campaign are thought tobe approximately one every 3 days – in partdue to an air defence that was typical of theSoviet pattern from the 1960’s era [1]);• Put an emitter such as a SAR on boardand, from an EW perspective, the UAVbecomes a slow moving, highly luminoussitting duck.
Another problem for the larger UAV’s isthat their development process parallels thatof larger (manned) aircraft, which stresseslonger life, a high level of maintainability, amulti-role capability, and high reliability.The resulting systems are expensive withlife-cycle costs and logistic complexitiesapproaching those of manned aircraft.

3. Miniature UAV’sUAV platform technologies (eg. guidance,airframes, control, etc.) are now sufficientlymature in the small-to-medium sized rangeto be considered as part of the ADF’sexperimental force mix options. Moreover,because UAV’s of this size are now beingfielded, and a range of technologies for newand advanced payloads is readily available,we can expect a rapid evolution in theavailable platform and sensor mix. Themission characteristics expected of theseUAV’s and their associated concepts ofoperations are also likely to changeaccordingly.
These Affordably Expendable alternatives[2] offer the prospect of a capability thatallows the warfighter to conduct the highvalue, high risk missions that are beyondthe capability (or justifiability) of othersystems. It relies upon the notion that theuseful life of the capability is a function ofits constituent payloads and technologiesrather than the physical life of the airframe.
The situation is similar to that of themodern computer. Early computers werephysically large, essentially stand-alonedevices that were expensive to produce andmaintain. Today’s computers, on the otherhand, are small and inexpensive platformsthat are extensively networked and, whenthey outlive their usefulness due toadvances in technology, are discarded eventhough they still function.
There is, of course, no free lunch: smaller,less expensive, lighter UAV’s are generallyless capable than their larger, more strategiccounterparts. Moreover, they also carry lesscapable payloads. However, this may beoffset by the increased affordability of thesystems, our ability to network the UAV’sand sensors to derive process gain1, and our
1 A simple example of “process gain” is depthperception from stereo-scopic vision.
capacity to withstand losses due to conflictand malfunction.
Given the recent advances in sensorminiaturisation, data links, and fusiontechnologies, it may well be that acombination of several smaller UAV’sstanding in at lower altitudes with a fewmanned platforms (or larger UAV’s)standing off and at higher altitudes providesthe optimal mix for the largest range ofapplications. Whatever the eventualsolutions, it is clear that the full breadth ofpayloads and CONOPS is only justbeginning to be explored.
In addition to the exploration/evaluation ofoperational concepts either in their ownright or (appropriately scaled) for theirlarger counterparts, as mini-UAV’s andtheir associated payloads can be acquired ordeveloped at a fraction of the cost of thelarger systems, they can also be used as aframework to explore more experimentalconcepts such as Network Centric Warfare(NCW).
4. AVATAR Key InitiativeNCW exploits concepts such as informationsuperiority to provide a competitive edge inwarfare. NCW emcompasses “the ability tocollect, process, and disseminate anuninterrupted flow of information whileexploiting and/or denying an adversary’sability to do the same” [3]. Under theAutonomous Vehicle Advanced TacticalApplications Research (AVATAR) KeyInitiative, DSTO plans to use formations ofnetworked, autonomous vehicles as a modelto explore the capability edge obtainedwhen networking multiple platforms andsensors.
AVATAR is aimed at developing a multi-d i sc ip l inary , c ross -envi ronmenta lframework for demonstrating the advancedapplications of autonomous, uninhabitedvehicles [4]. Its focus is on experimentation

in the hands of the warfighter. The aim is toinvestigate the potential for advancedcapabilities through the exploitation of newtechnologies and novel concepts ofoperation for networked, multi-platform,autonomous vehicles, sensors, andeffectors.
To develop the airborne aspect of thisexperimental capability and to explore thecapability edge as a function of technologyinnovation and application innovation, werequired the development of a flexible andaccessible autonomous aerial vehicleinfrastructure. The Electronic WarfareDivision (EWRD) of the Defence Scienceand Technology Organisation (DSTO)recently signed a contract with AerosondeLtd to provide this infrastructure throughthe use of their mini-UAVs. Thecapabilities of the Aerosonde UAV areshown in Table 1 (for more details on theUAV, readers are advised to see the websitewww.aerosonde.com.au).
The six Aerosonde UAV's purchased underthe contract will be used to conduct a seriesof trials over a two-year experimentalprogram. In addition to funding purchase ofthe airframes, the contract makes provisionfor the trials program, some experimentalpayloads, a ground control/support element,and a launch and recovery system.
It is important to note that AVATAR isaimed at experimentation and fieldingproof-of-concept systems in order to informfuture capability analysis, acquisition orupgrade. It is not aimed at defining “final”capability solutions. The significantrestrictions associated with limited payloadand power can be viewed as either atechnology challenge or simply as factorsthat limit the scale of the experiment (egdata link range or data rate). Clearly, someCONOPS and payloads will not scale downto enable sensible experimentation.
SpecificationWeight 13 - 15 kgWing span 2.9 mEngine 24 cc, Avgas, 1kwFuel Consump 180g/hr level flightFull Fuel Load 5 kgNavigation GPS/DGPSCommunicationRange via UHF
200 km depending onheight and terrain
On board powergeneration
40 Watt continuous60 Watt peak
PayloadComputer
Supports SerialInterface Input
Main PayloadBay Area (canbe adapted)
100mm Length120mm Width180mm Depth
Performance
Speed, Climb 18 – 32 ms-1
Climb > 2.5 ms-1
Endurance,Range
No Payload > 30 hrsClear air >3000km
Altitude Range 100 m to > 6000 mPayload Maximum 5 kg (gives
approx 10-hour flight)Landing & takeoff distance
Less than 300 m
Take off speed Average 90 km/hrOperationStaff forLaunch andRecovery
3 ~ Controller,Engineer,Pilot/Maintenance
Staff for FlightCommand
1 Person for severalaircraft
GroundEquipment
Proprietary StagingBox, 2 PC’s, GPS
Flight Fully autonomous, orunder Base Command.
Launch andRecovery
Launch from car roofrack, land on belly
Max speed 31 m/s (110 km/hr)Ground & aircomms
UHF or Satcommsto/from Aerosonde
Table 1: Aerosonde UAV Specifications

Nevertheless, the opportunities offered bythe miniaturisation of the UAV’s and theirpayloads mean that there is considerablepotential for new approaches to oldproblems and that we must explore verydifferent cost-capability equations.
The overall AVATAR program goal is toanalyse, develop, and field - in conjunctionwith all that wish to participate - a variedrange of baseline operational concepts,flight and sensor algorithms, and payloadssuitable for small, tactical UAVs. A crucialpart of this research will be thedemonstration of combined platform-UAVoperations at a relatively sophisticated level(i.e. UAV experimentation in conjunctionwith ADF assets).
5. Mini EW PayloadsThere are a variety of potential payloadssuitable for mini-UAVs. These include:communications & electronic intelligence(SIGINT) payloads, communications andradar jammers, electro-optic, infra-red, andMAW sensors, MTI and SAR radars, BDAsensors, comms relays, EW self-protectionsuites, chemical, biological, & nucleardetectors, target designators, and “horizonextenders”. Only a selection of the EWpayloads is discussed here.
Electronic Surveillance (ES) PayloadsES and SIGINT sensors can be a source ofvital information, particularly when relatedto imagery information to form a morecomplete or accurate Situational Awarenesspicture or when updating the ElectronicOrder of Battle. The key is the integrationof the inputs from all of the sensors on allof the platforms. Moreover, as the sensoronly has to receive and process signals itdoes not require large amounts of power tooperate it. Consequently, ES payloads scalewell to the power constraints of mini-UAVs.
Figure 1: Geolocation error ellipses for 0.5deg. rms DF sensors onboard 2 platformswith stand-off range of 100km. AOI (100kmx 100km) is bounded by blue line.
Figure 2: Geolocation error ellipses for 5deg. rms DF sensors onboard 8 platformswith stand-in capability. AOI (100km x100km) is bounded by blue line.
Mini-UAVs are not considered a practicalreplacement for the larger strategic UAV’s,although by networking their sensors wemay derive greater capability. As anexample, Figure 1 and Figure 2 show acomparison between the 50% uncertaintybounds for geolocating2 emissions ofinterest from two platforms with 0.5degreerms Direction Finding (DF) capability andeight platforms with 5degree rms DFcapability, respectively. The more accuratesensors are nominally placed on board
2 Geolocation is the process of determining,either directly or indirectly (eg. through DF), thelocation of an emitter of interest.
high-value assets and must thereforestandoff at a range of 100km, whereas theless capable sensors, which are significantlysmaller and cheaper, are placed on moreexpendable platforms and may thereforestand-in (their cost means that we are alsoable to afford more of them). Analysis ofthe figures shows that system using the lessaccurate sensors has errors around 50% lessthan those of the more expensive system.
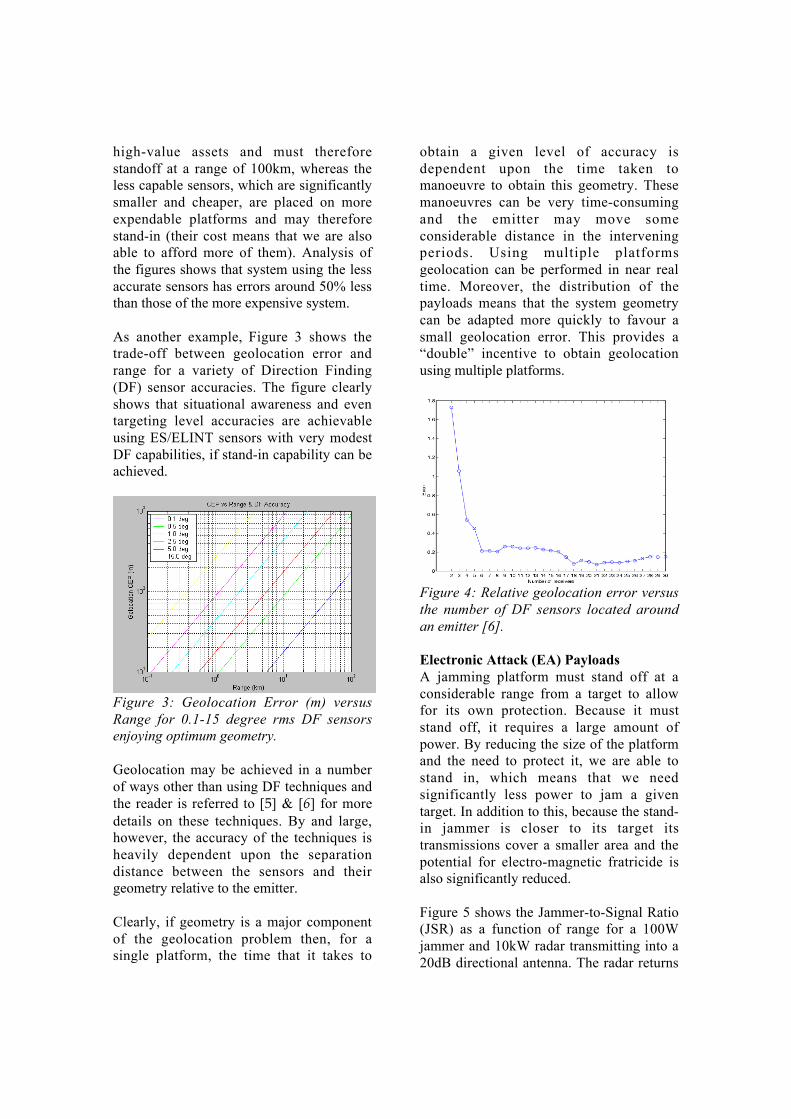
As another example, Figure 3 shows thetrade-off between geolocation error andrange for a variety of Direction Finding(DF) sensor accuracies. The figure clearlyshows that situational awareness and eventargeting level accuracies are achievableusing ES/ELINT sensors with very modestDF capabilities, if stand-in capability can beachieved.
Figure 3: Geolocation Error (m) versusRange for 0.1-15 degree rms DF sensorsenjoying optimum geometry.
Geolocation may be achieved in a numberof ways other than using DF techniques andthe reader is referred to [5] & [6] for moredetails on these techniques. By and large,however, the accuracy of the techniques isheavily dependent upon the separationdistance between the sensors and theirgeometry relative to the emitter.
Clearly, if geometry is a major componentof the geolocation problem then, for asingle platform, the time that it takes to
obtain a given level of accuracy isdependent upon the time taken tomanoeuvre to obtain this geometry. Thesemanoeuvres can be very time-consumingand the emitter may move someconsiderable distance in the interveningperiods. Using multiple platformsgeolocation can be performed in near realtime. Moreover, the distribution of thepayloads means that the system geometrycan be adapted more quickly to favour asmall geolocation error. This provides a“double” incentive to obtain geolocationusing multiple platforms.
Figure 4: Relative geolocation error versusthe number of DF sensors located aroundan emitter [6].
Electronic Attack (EA) PayloadsA jamming platform must stand off at aconsiderable range from a target to allowfor its own protection. Because it muststand off, it requires a large amount ofpower. By reducing the size of the platformand the need to protect it, we are able tostand in, which means that we needsignificantly less power to jam a giventarget. In addition to this, because the stand-in jammer is closer to its target itstransmissions cover a smaller area and thepotential for electro-magnetic fratricide isalso significantly reduced.
Figure 5 shows the Jammer-to-Signal Ratio(JSR) as a function of range for a 100Wjammer and 10kW radar transmitting into a20dB directional antenna. The radar returns

1000
km
12hr
10hr
7
hr
0
hr
Time
onstation
are based on the detection of a target with aradar cross-section roughly the size of a(non-stealth) strike fighter.
Figure 5: Jammer-to Signal Ratio versusRange for a 100Watt noise jammer against10kW radar with 20dB antenna gainattempting to detect a target of 1m2 RCS.The red, green, and blue lines are for targetranges of 1, 10, and 100km.
The figure shows that the achievable JSRfrom a 100W jammer located 10km fromthe radar and protecting the target at a rangeof 10km is equivalent to a 10kW jammerlocated 100km from the radar attempting toprotect the same target. When one considersthat many modern weapons systems haveranges in excess of 100km and thatminiature UAV’s are also hard to detect(and hence target) it makes the technologiesa very attractive potential alternative. Inaddition to this, even if the mini-UAVs aredetected, targeted, and engaged, the UAVshave such small IR signatures and RCSthere is still no guarantee that the weaponswill fuse correctly and destroy the UAVs.
Horizon ExtendersIn addition to placing the sensor/processingcapabilities onboard the UAV, it can betreated as a “flying antenna”. In this case,the UAV is effectively an electromagnetic“bent pipe” – comprising a receive antenna,a modest amount of processing capacity,some time stamping & signal amplification,and a (directional) transmit antenna.
Combined with knowledge of the UAV’slocation and a high gain antenna on theground (and considerably more processingpower than is available onboard the UAV)we have the capacity for significant horizonextension.
Figure 6: Radio line of sight vs. altitude.
Figure 6 shows the rapid increase in thepotential line of sight (LOS) as a functionof UAV height. It can be seen that even forvery modest altitudes of about 500m, LOSof around 100km are achievable.
Operational Issues
Figure 7: Endurance capabilities of theAerosonde UAV in geographic perspectivefor a 2kg payload (12 hrs on station ~ blackcontinuous circle to 0 hrs on station ~ reddotted circle)
Figure 7 and Figure 8 show the typicalendurance capabilities and coverage thatcould be achieved using the ES payloads

referred to above when flown on theAerosonde mini-UAV. Control of the UAVin the area of operations could then beundertaken either by a commander at thelaunch site or by one based further forward(eg. onboard a ship or tactically deployed).
10005000
km
10005000 10005000
km
Figure 8: Typical ES sensor coverage fortwo areas of interest - the range estimatesassume a launch from Darwin, a 2kgpayload, and an altitude of 3.5km. The timeon station is estimated as 15 hours.
6. DSTO TrialsIn February and June of this year, DSTOconducted a series of trials to demonstratepotential operational concepts for miniatureUAVs involved in maritime EW operations.The mini-UAVs were designed, built, andoperated by Aerosonde Ltd. The payloadswere designed, built, and operated byDSTO. The payloads tested were:• EA ~ 100MHz bandwidth noise jammer,• RF repeater ~ a test target of controlledradar cross-section used with EA payload,• ES ~ 2–18 GHz superheterodyne receiver
The combined objectives of the trials were:1. Demonstrate successful launch of theAerosonde UAV carrying the EW payloads,2. Demonstrate hand-over of control of theUAV to a surface combatant and back againto the land-based launch/recovery crew,
3. Determine detectability of the AerosondeUAV using the ship’s radars and ES,4. Determine the effectiveness of the EApayload installed on an Aerosonde UAV,5. Determine the effectiveness of the ESpayload onboard an Aerosonde UAV,6. Demonstrate the surface combatant’s“extended horizon” capability by enablingit to control the UAV-based ES payload andreceive/process surface emissions detectedover the horizon from the ship,7. Demonstrate injection of the ES datacollected by the payload onboard the UAVinto DSTO’s EXC3ITE network,8. Demonstrate the TECHINT “value-add”of the ELINT/ES product within EXC3ITE,9. Demonstrate the dissemination of thisproduct to the Joint Command SupportEnvironment (JCSE) in near real time.10. Demonstrate successful landing back atJervis Bay carrying the EW payloads.
Figure 9 shows a schematic of the DSTOtrials conducted in June and February.
LOW BW LOW BW COMMSCOMMS
VALUE ADD TO VALUE ADD TO ELINT PRODUCTELINT PRODUCT
JCSEJCSE
EXC3ITEEXC3ITE ACCESS ACCESS VIA WEB VIA WEB TOOLSTOOLS
TACTICAL TACTICAL ESM/ELINTESM/ELINT
SA- 6
RESTRICTED -Mock-Up Data
Map shows spatial features including SA-6 site
Clock shows temporal activityof SA-6 site (from ELINT)
CONTROL CONTROL
LINKSLINKS
TACTICAL TACTICAL
USERSUSERS
LOW BW LOW BW
COMMSCOMMS
VALUE ADD TO VALUE ADD TO
ELINT PRODUCTELINT PRODUCT
JCSEJCSE
EXC3ITEEXC3ITEACCESS ACCESS
VIA WEB VIA WEB
TOOLSTOOLS
TACTICAL TACTICAL
ESM/ELINTESM/ELINT
SA- 6
RESTRICTED -Mock-Up Data
Map shows spatial features including SA-6 site
Clock shows temporal activityof SA-6 site (from ELINT)
CONTROL CONTROL
LINKSLINKS
TACTICAL TACTICAL
USERSUSERS
Figure 9: Schematic of mini-UAV trials
The trials are reported in detail elsewhere[7] & [8]. The February trial comprised EAand a “shake-down” of the ES payloads.The June trial may be summarised as:
At launch, a pilot at the Aerosonde Launchand Recovery Site (ALRS) manually flewthe UAV before switching it to itsautonomous mode. Control of the UAV andits payload was then passed to another land-based control site or to the ship, dependingupon the trial. A DSTO controlled emitter
was located, as were a number of othermarine radars. The radars and transmitterwere used as test signals for the ESpayload. Signals information received at theUAV was passed to the ship and the land-based control sites. On being received at theland-based control site, the information wasinjected into DSTO’s EXC3ITE networkfor TECHINT value-add and disseminationto the JCSE in near real time.
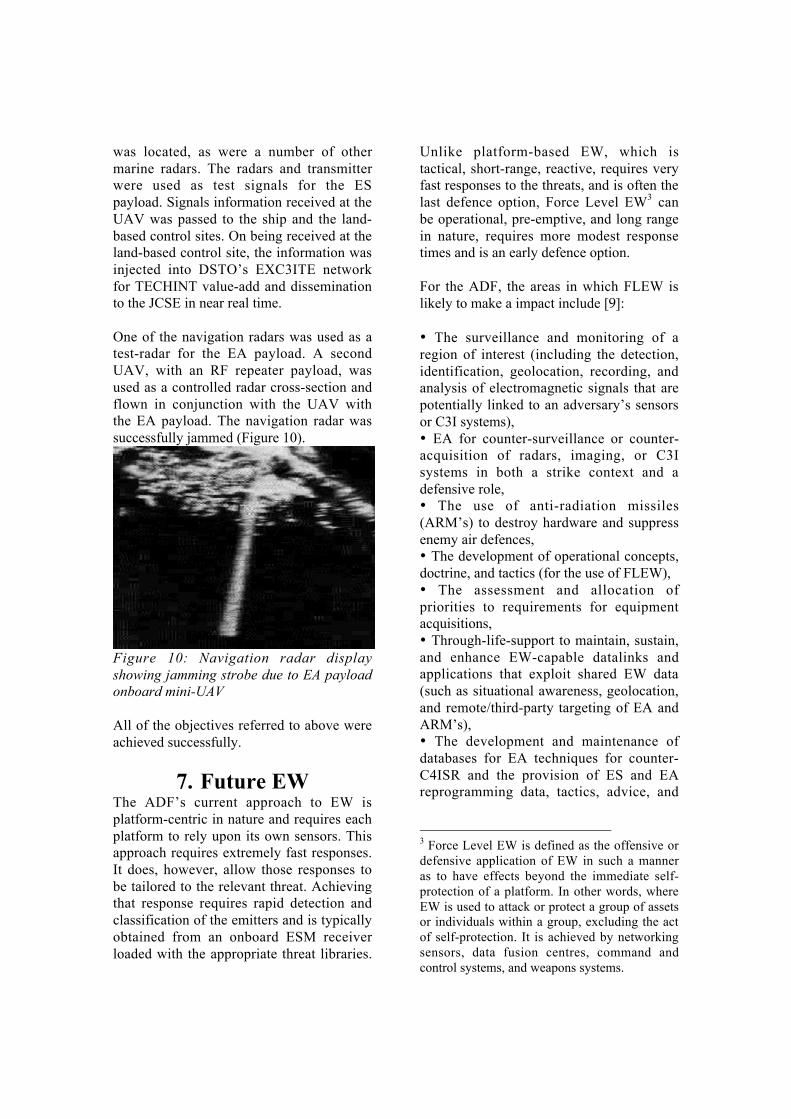
One of the navigation radars was used as atest-radar for the EA payload. A secondUAV, with an RF repeater payload, wasused as a controlled radar cross-section andflown in conjunction with the UAV withthe EA payload. The navigation radar wassuccessfully jammed (Figure 10).
Figure 10: Navigation radar displayshowing jamming strobe due to EA payloadonboard mini-UAV
All of the objectives referred to above wereachieved successfully.
7. Future EWThe ADF’s current approach to EW isplatform-centric in nature and requires eachplatform to rely upon its own sensors. Thisapproach requires extremely fast responses.It does, however, allow those responses tobe tailored to the relevant threat. Achievingthat response requires rapid detection andclassification of the emitters and is typicallyobtained from an onboard ESM receiverloaded with the appropriate threat libraries.
Unlike platform-based EW, which istactical, short-range, reactive, requires veryfast responses to the threats, and is often thelast defence option, Force Level EW3 canbe operational, pre-emptive, and long rangein nature, requires more modest responsetimes and is an early defence option.
For the ADF, the areas in which FLEW islikely to make a impact include [9]:
• The surveillance and monitoring of aregion of interest (including the detection,identification, geolocation, recording, andanalysis of electromagnetic signals that arepotentially linked to an adversary’s sensorsor C3I systems),• EA for counter-surveillance or counter-acquisition of radars, imaging, or C3Isystems in both a strike context and adefensive role,• The use of anti-radiation missiles(ARM’s) to destroy hardware and suppressenemy air defences,• The development of operational concepts,doctrine, and tactics (for the use of FLEW),• The assessment and allocation ofpriorities to requirements for equipmentacquisitions,• Through-life-support to maintain, sustain,and enhance EW-capable datalinks andapplications that exploit shared EW data(such as situational awareness, geolocation,and remote/third-party targeting of EA andARM’s),• The development and maintenance ofdatabases for EA techniques for counter-C4ISR and the provision of ES and EAreprogramming data, tactics, advice, and
3 Force Level EW is defined as the offensive ordefensive application of EW in such a manneras to have effects beyond the immediate self-protection of a platform. In other words, whereEW is used to attack or protect a group of assetsor individuals within a group, excluding the actof self-protection. It is achieved by networkingsensors, data fusion centres, command andcontrol systems, and weapons systems.

analysis via secure communications fromsupport areas to forward areas,• The assessment of derived sensor and C3arrangements of potential adversaries forvulnerability to EA,• The investigation of the vulnerability toEA of the ADF’s C4ISR arrangements andthe implementation of appropriateprotective measures,• The research, development, andapplication of both hardware and softwaretechnologies to produce and enhanceintegrated EW situational awareness andEA capabilities, and• Liaison with civilian authorities onmatters relating to an operational EWcapability.
The implementation of FLEW is morecomplex than simply widening thecommunications bandwidth and linking theplatforms. It includes the interpretation andapplication of information of unevenquality and timeliness, the purification ofinformation to preserve the quality of thenetwork and prevent error propagation, andthe coordination of assets to obtain asynchronised response. In addition to this, itmust be achieved within a framework offinite resources [10].
Physical
EM
Cyberspace
Battle
space
Effectors
Agents Decision
Makers
Data Links
Sensors
Data Links
Figure 11: Relationship between ForceLevel EW entities and elctromagneticconflict.
The coordination and synchronisation ofassets has the potential for improving EWoperations. However, it also increases thematrix of options available to the ADF. Thestudy of Complex Adaptive Systems (CAS)shows that the most striking benefits come
not from the direct linkages andconnections between the entities, but fromthe vastly larger number of indirectconnections that are established [11].
The requirements for FLEW transcend thetraditional environmental boundaries of air,land, and sea and also the operationalboundaries of tactical and strategic. In bothcases, this is because the sub-systemsinvolved in delivering the EW productoccupy multiple domains. Consequently, itwill be necessary to analyse the use andintegration of these entities within a jointoperations framework that spans both thetactical and strategic environments. Forthese reasons, it is instructive to break thebattlespace into three overlapping domains:physical space, cyberspace, and electro-magnetic space. For each of these domainsthe means by which the ADF may affect anoutcome may be broken into four blocks(Figure 11):
a) Sensors, which provide information toform the basis of situational awareness,b) Agents, which perform selected tasksdelegated by the effectors/decision-makers,c) Decision-makers, which exercise C2, andd) Effectors, which execute the plans andprosecute the engagements.
These are the standard entities referred to inNCW texts, and FLEW draws heavily fromsome of the concepts in this area. Thearchitecture that supports FLEW is heavilydependent upon the nature and capabilitiesof the datalinks used to support the sensor-processing, value-adding, and C2 processes.
In the FLEW concept of operations theparticipants are heavily dependent upon anetwork of continuously adapting systemsthat are capable of making strategic choicesabout how to survive and achieve theirgoals in a dynamic environment. The agentsare enabled to perform a range of selectedtasks delegated by other participants,decision makers, or controllers. The power

of the networked force is thus derived fromthe strong networking of a well informed,but geographically dispersed force.
To visualise the potential benefits of FLEWand UAV networks it is instructive toanalyse the Reactive EW4 and Geolocationproblems. In a platform-centric engagementthe ESM receiver is co-located with its EAassets and radar sensors and the receiver isallocated only a limited duty cycle becauseof the look-through problem5. Clearly, theprobability of intercepting the threat signalsis a function of the duty cycle (amongstother things). Moreover, the response delayof the platform’s countermeasures is afunction of the sensor and processinglatencies. Achieving a response to multiplethreats within a limited duty cycle istherefore extremely challenging, as rapiddetection and classification of the emittersis needed. Geolocation is similarly affected.First, if DF techniques are used the level ofaccuracy that can be achieved within agiven time frame is restricted, as theplatform must spend time manoeuvring toobtain the necessary geometry. Second, theprobability of intercepting certain types ofsignals is obviously affected by the look-through problem. If, instead of DF, TDOAtechniques are used to geolocate the signals,the geometry is similarly unfavourable asthe sensor’s antennas are limited in theirdistribution to the extremes of the platform.
Let us now consider the situation where theES sensors are distributed across a numberof geographically dispersed platforms. Byplacing dedicated sensors on the platformsand combining the information availablefrom each of them we are able to improve(if not completely remove) the look-throughproblem. Similarly, we are able to improve 4 Reactive EW is the deployment of electroniccountermeasures in response to an EW threat(eg. jamming a seeker on an incoming missile).5 Look-through is the inability to receive andtransmit at the same time due to the co-locationof the ESM and jammer/radar.
the likely detection of signals through thecumulative probability of intercept ofmultiple sensors. On the other hand, theinformation must be passed over finitebandwidth communications links and canbe expected to experience network delays.Thus, the multi-platform case offersreductions in the response delay to a threat,but only if the gains in sensor andprocessing latency are not overwhelmed bynetwork latencies. This may require newdatalinks and more intelligent ways ofpassing information.
Clearly, in terms of achieving specificlevels of geolocation accuracy within agiven time frame, for any fixed level ofpayload capability, the multi-platform caseprovides superior results because of thedistributed geometry. That is, in the case ofDF techniques, multiple “cuts” or “fixes”are available simultaneously and in the caseof TDOA techniques, the dispersal of thesesnors’ antennas is no longer restricted tolocation on a single platform (which meansthat longer baselines may be used).
In addition to the above, in the Force LevelEW environment it is possible to use aheterogenous mix of sensors to exploit boththe diversity of the available information aswell as its geographic distribution. Forinstance, we can use a wideband IFM6
receiver to cross-cue one or morenarrowband superheterodyne7 receivers. Asbefore, combining the signal time-of-arrivalinformation with the UAV locationsprovides a geolocation capability. Thistime, however, the Probability of Intercept(POI) is enhanced and the description of the
6 Instantaneous Frequency Measurement (IFM)receivers can typically monitor a wide band offrequencies continuously (eg all spectrum from2-18GHz), but they provide poor information onthe signals received.7 Superhetrodyne receivers monitor only anarrow band of frequencies (eg 1GHz segment),but provide more accurate signal information.

signal likely to be more accurate (and thecommensurate signal ID).
If we now combine the control of thesepayloads with the autonomous control ofthe UAV’s through the use of IntelligentAgents8 and provide these agents with acommunications architecture that allows theinformation to be passed from agent toagent we have a system that is potentiallyable to adapt to its dynamic environment.
Depending upon the nature of the corporateand individual goals of the UAVs and theirpayloads the structure of the network mayvary greatly, but it allows the strengths ofthe individual agents to be combined into asingle cohesive team [11]. This intelligent,autonomous, adaptive, and co-operativebehaviour is an important component of theNCW and FLEW concepts and DSTO has aprogram of work that is exploring a rangeof options pertinent to their development.Currently, these concepts are implementedin simulation environments, such as theFLEWSE (Force Level EW SimulationEnvironment ~ pronounced “floozy” [12]).
8. ConclusionsEW needs UAV’s and UAV’s need EW.The synergistic relationship can provide theADF with enhanced Situational Awareness,a significantly superior capacity to conductEW operations, and much better protectedUAV’s.
Miniature UAV’s are of particular interestto EW operations as these UAV’s are likelyto undertake some of the most dull, dirty,dangerous, and impossible missions (D3I).The affordability of these smaller UAV’s
8 An Intelligent Agent is an autonomousalgorithm that, having been provided with someover-arching mission objective, senses, reasons,and acts upon its environment independent ofany external command structures. A typicaldeployment philosophy might be “go over there,fix the problem, and don’t do any harm”.
also provides us with the opportunity toacquire or develop suitable payloads forthese missions. In addition, it allows for thedevelopment, experimentation with, andevaluation of (scaled) operational conceptsfor the larger UAV’s and more advancedconcepts, such as NCW.
DSTO has embarked on the AVATAR KeyInitiative. The initiative is aimed atdeveloping a multi-disciplinary, cross-environmental framework for demon-strating the advanced applications ofautonomous, uninhabited vehicles. The aimis to investigate the potential for advancedcapabilities through the exploitation of newtechnologies and novel concepts ofoperation for networked, multi-platform,autonomous vehicles, sensors, andeffectors. Its focus is on “experimentationin the hands of the warfighter”.
AckowledgementsThe authors would like to thank Dr DonKoks and Mr Richard Bowyer of EWRDfor their helpful contributions to this paper.
References
[1] Steven J. Zaloga, The Evolving SAMThreat: Kosovo & Beyond, J. ElectronicDefence: pp45-50, May 2000
[2] Tactical EW Division, NRL, AffordablyExpendable UAVs, Paper prepared for USSecretary of Navy, April 1999
[3] Alberts, D., J. Gartska, & F. Stein,Network Centric Warfare, CCRPPublication Series, Washington DC, USDepartment of Defense, 1999
[4] Lindsay, A.C., AVATAR Key Initiative -Proposal for Scope, Minute to CDS, April2002

[5] TTCP-EWS-TP4, Next GenerationTactical ES Geolocation Technologies,Proceedings of Workshop held at NRL,Washington, April 1999
[6] D. Koks, Passive Geolocation forMultiple Receivers with No Initial StateEstimate, DSTO Report, DSTO-RR-0222,November 2001
[7] K. Brown, Miniature UAV EW PayloadNavy Trials, Draft DSTO Report, Sept 2002
[8] C. Howard & K. Mason, Force LevelEW And Situational Awareness For FutureLittoral Warfare, Land Warfare Conference2002, Brisbane, 22-24 October, 2002
[9] Rockliff, S., An Assessment of R&D tobe undertaken for Force Level EW, DSTOReport DSTO-TR-1018, Oct 2000
[10] Sciortino, J. et al, The Role of ArtificialIntelligence and Complex Adaptive Systemsin Network Centric Warfare, Proceedingsof the 45th Joint EW Conference, Monterey,California, May 2000
[11] R.S. Bowyer & R.E Bogner, Agent-Enabled Sensor Networks for TargetObservation, Advanced InformationSystems in Defense, Edited by Prof. L.C.Jain, published by Springer-Verlag, 2002
[12] Finn, A. & G. Chalmers, OperationsAnalysis Methods for Force LevelElectronic Warfare, DSTO Report, DSTO-TR-0298, June 2002




























