Embed Size (px)
Citation preview

e-ISSN: 2582-5208 International Research Journal of Modernization in Engineering Technology and Science
Volume:02/Issue:03/March-2020 www.irjmets.com
www.irjmets.com @International Research Journal of Modernization in Engineering, Technology and Science
[579]
MIND CONTROLLED ROBOTIC ARM
Saravana Pandian.M*1
, Karthikeyan.S*2
, Ijaz Mohammed.S*3
, Kiran.K*4
*1Professor, Department of ECE, Jeppiaar SRR Engineering College, Padur, Chennai, India.
*2,3,4 B.E Final year, Department of ECE, Jeppiaar SRR Engineering College, Padur, Chennai, India.
ABSTRACT
This project attempts to implement an Arduino robotic Arm to simulate a brainwave-controlled. The robot
should be ready to move freely anywhere under the control of the user and it’s not required to predefine any
map or path. The controlled command is obtained from brain sense. BCI is going to be developed by sending the
EEG signal to the Arduino UNO and control the movement of the robot. This project is implemented by using
the attention blinking as the robot controlling method because the eye blinking will provide a required pulse for
EEG signal. By the application of neural network, is useful to classify the blinking signal and thus the noise.
The user can send the command to regulate the robot by blinking twice during a short period.
KEYWORDS: Brain-Computer Interface, Electroencephalogram, Neural network, Eye Blink, Neuro-sky
sensor, Robotic arm.
I. INTRODUCTION
The Systems capable of understanding the various facets of human communication and interaction with
computers are among trends in Human-Computer Interfaces (HCI). An HCI which is formed on the guiding
principle (GP): “think and make it happen with none any physical effort” is named a brain-computer interface
(BCI).By this project, the robot will be evaluated by driving in different places to test whether it can able to
follow the expected path, to avoid the obstacles, and to stop on a specific position.
II. SIGNAL FREQUENCY
The main four frequency of the human EEG waves are:
Beta:
Beta activity is a "fast" activity. It features a frequency of 14 and greater Hz. It is seen on both sides in
symmetrical distribution and also the most evident frontal. Beta is accentuated by sedative-hypnotic drugs
specifies the benzodiazepines and the barbiturates. Beta may be reduced in areas of cortical damage. It’s
considered a standard rhythm.

e-ISSN: 2582-5208 International Research Journal of Modernization in Engineering Technology and Science
Volume:02/Issue:03/March-2020 www.irjmets.com
www.irjmets.com @International Research Journal of Modernization in Engineering, Technology and Science
[580]
Alpha:
Alpha has a frequency range between 7.5 and 13 Hz. It usually is best seen within the posterior regions of the
head on each side, being higher in amplitude on the dominant side. Alpha appears when closing the eyes and
relaxing, and disappears when opening the eyes or alerting by any mechanism of thinking, calculating. It is the
main rhythm seen in normal relaxed adults. It is present during most of life especially after the age of the
thirteenth year.
Theta:
Theta Features a frequency of 3.5 to 7.5 Hz and is classified as "slow" activity. It is perfectly normal in children
under the age of 13 years and sleep but abnormal in awake teenagers. Theta is visible as a manifestation of focal
subcortical lesions and it mostly attains at children.
Delta:
Delta features a frequency range of 3 Hz or below. It tends to be high in amplitude and produces slowest waves.
It is normal because of the dominant rhythm in infants up to at least one year and in stages 3 and 4 of sleep. It is
usually the most prominent frontally in teenage (Frontal Intermittent Rhythmic Delta) and the posteriorly in
children (OIRDA - Occipital Intermittent Rhythmic Delta).
III. HARDWARE REQUIREMENTS
Mind wave Mobile or Brain-sense
Robotic Arm
Arduino Board
HC-05 Bluetooth Module
USB Cable for Arduino
Bluetooth dongle, if the pc doesn’t have inbuild Bluetooth capabilities
Batteries for Robotic-Arm or External Power supply ( 12 v )
1) Brain Sensor:
Technical specification:
• Module – TGAM 1
• Lead Electrodes – Main Electrode & Ear clip electrode(Ground)
• Type of Electrode – Non-Invasive | Dry
• Battery – 3 AAA Battery
• Stand up Time – 6 Hours run time
• Connectivity – Bluetooth v2.1 class.
• Compact ability: Windows XP | Android | Raspberry Pi | Arduino.
• Measure – Blinking | Meditation | Attention | EEG Bands (Alpha, Beta, Gamma, Delta & Theta) | Raw
EEG with Eyeblink

e-ISSN: 2582-5208 International Research Journal of Modernization in Engineering Technology and Science
Volume:02/Issue:03/March-2020 www.irjmets.com
www.irjmets.com @International Research Journal of Modernization in Engineering, Technology and Science
[581]
Fig-1: Brain Sensor
2) Bluetooth Sensor:
• Two Bluetooth modems are connected.
• One is connected to the Robotic arm
• And another one is hooked up with the brainwave sensor
Fig-2: Bluetooth Sensor
3) Arduino Uno:
• Arduino Uno is an open-source microcontroller board based on the Microchip ATmega328P
microcontroller and developed by Arduino.cc.
• The board is build up with the set of digital pin and analog input/output pins that may be interfaced to
varied expansion boards and other circuits.
Fig-3: Arduino Uno

e-ISSN: 2582-5208 International Research Journal of Modernization in Engineering Technology and Science
Volume:02/Issue:03/March-2020 www.irjmets.com
www.irjmets.com @International Research Journal of Modernization in Engineering, Technology and Science
[582]
4) Yellow Gearbox Motor:
The 6V yellow gearbox is a major source for robotic-Arm. With plastic construction and colored in
bright yellow.
The arm consists of Four gearbox motor
The gripper and arm can be mounted on either side and the Gearmotor works well between 4V to 7V
(recommended 6 Volts).
Fig-4: Yellow Gearbox Motor
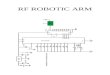
Robotic Arm:
Robotic-arm consists of four gearbox motors used to move the fingers of the arms.
One motor is connected with Arm finger and another two motor connected with arm up and down
movement.
And the last motor is connected for robot rotation90’ degree (Clockwise, Anticlockwise)
The Programmable interface computer microcontroller will help to control the servo motors.
The robotic fingers are controlled by attention and meditation levels.
Fig-5: Robotic Arm

e-ISSN: 2582-5208 International Research Journal of Modernization in Engineering Technology and Science
Volume:02/Issue:03/March-2020 www.irjmets.com
www.irjmets.com @International Research Journal of Modernization in Engineering, Technology and Science
[583]
Software Required:
Arduino Ide
Matlab Simulink
IV. BLOCK DIAGRAM
EEG SIGNAL MEDITATION LEVEL BLINK SIGNAL
BRAIN SENSOR WITH BLUETOOTH
CONNECTION
Fig-6: Block Diagram
V. WORKING AND ANALYSIS
• Arduino is programmed for set controlled commands to Robotic Arm and also for Bluetooth module
interface.
• Both the Brain sense and the Robotic Arm ( via HC-05 ) get paired to the laptop.
• The Matlab acquired the Raw EEG from our Brain via Brain sense and detected blink as the command
for Robotic arm.
• Matlab GUI shows the Graphical representation of our Brain waves and therefore the blink pattern.
MATLAB AND SIMULINK ROBOTIC ARM
ARDUINO WITH BLUETOOTH
ROBOTIC ARM

e-ISSN: 2582-5208 International Research Journal of Modernization in Engineering Technology and Science
Volume:02/Issue:03/March-2020 www.irjmets.com
www.irjmets.com @International Research Journal of Modernization in Engineering, Technology and Science
[584]
• Initially, the are six commands are assigned to the robotic Arm, depends upon the eye blink the Matlab
pass the command to the robotic arm
Fig-7: Neuroview of strong eye blink(Delta)
Fig-8: Matlab of Simulink no Eyeblink (Beta)

e-ISSN: 2582-5208 International Research Journal of Modernization in Engineering Technology and Science
Volume:02/Issue:03/March-2020 www.irjmets.com
www.irjmets.com @International Research Journal of Modernization in Engineering, Technology and Science
[585]
Fig-9: Matlab of Simulink with moderate Eyeblink(Theta)
VI. CONCLUSION
This brain-controlled mobile robot provides higher safety because they are used to transport paralyzed people.
This is often a major difference between brain-controlled mobile robots and other brain-controlled devices.
During this paper, the BCI system has been developed to address these challenges. A Brain-computer interface
is a system that can bypass conventional channels of communication. These mobile robots having applications
are Automotive Applications, Industrial Application, Home applications, Monitoring device applications,
Remote control applications. The mobile robot doesn’t need any additional robot intelligence. Cost is a smaller
amount also computational complex city is low. Having various applications such as Industrial Application
Home applications Automotive Applications, Monitoring, device applications, Remote applications.
VII. REFERENCES
[1] “A Brain-Computer Interface using electrocorticographic signals in Humans”, Eric C Leuthardt, Gerwin Schalk,
Jonathan R Wolpaw, Jeffrey G Ojemann & Daniel W Moran IOP Publishing Ltd,2004
[2] L.Y. Khuan, “A Review of Signal Processing in Brain-Computer Interface System”, IEEE EMBS Conference on
Biomedical Engineering and Sciences, pp 443-449, 2010.
[3] Narendra Bawane, “Brain-computer interface for hands-free computer accessibility”, International journal of
engineering sciences and Research, pp 556-561, August 2015
[4] Jinyi Long, Yuanqing Li, Hongtao Wang, Tianyou Yu, Jiahui Pan, and Feng Li, “A Hybrid Brain-Computer Interface
to Control the Direction and Speed of a Simulated or Real Wheelchair”, SEPTEMBER 2012
[5] Chiemla Onunka, Glen Bright, “Robotics and the brain-computer Interface System: Critical Review for Manufacturing
Application”.
[6] Brice Rebsamen, Cuntai Guan, “A Brain Controlled Wheelchair to Navigate in Familiar Environments”, IEEE
TRANSACTIONS ON NEURAL SYSTEMS AND REHABILITATION ENGINEERING, VOL. 18, NO. 6,
DECEMBER 2010

e-ISSN: 2582-5208 International Research Journal of Modernization in Engineering Technology and Science
Volume:02/Issue:03/March-2020 www.irjmets.com
www.irjmets.com @International Research Journal of Modernization in Engineering, Technology and Science
[586]
[7] Rohan Hundia, “Brain-Computer Interface-Controlling Devices Utilizing The Alpha Brain Waves”,
INTERNATIONAL JOURNAL OF SCIENTIFIC & TECHNOLOGY RESEARCH VOLUME 4, ISSUE 01,
JANUARY 2015.
[8] Yuanqing Li Jiahui Pan, Fei Wang, and Zhuliang Yu, “A Hybrid BCI System Combining P300 and SSVEP and Its
Application to Wheelchair Control”, IEEE TRANSACTIONS ON BIOMEDICAL ENGINEERING, VOL. 60, NO.
11, NOVEMBER 2013
[9] H.T. Nguyen, “Adaptive EEG Thought Pattern Classifier for Advanced Wheelchair Control”, Proceedings of the 29th
Annual International Conference of the IEEE EMBSCité Internationale, Lyon, France August 2326, 2007
[10] Paola Belluom, Maide Bucolo, Luigi Fortuna, Mattia Frasca “Robot Control through Brain-Computer Interface for
Pattern Generation”, University of Catania, Dipartimento di Ingegneria Elettrica, Elettronica e Informatica, Viale A.
Doria 6, 95125 Catania, Italy,[email protected].
[11] Francesco Carrino, Joel Dumoulin, Elena Mugellini, Omar Abou Khaled1, Rolf Ingold, “A self-paced BCI system to
control an electric wheelchair: evaluation of a commercial, low-cost E E G device”,1 University of Applied Sciences
Western SwitzerlandFribourg, Switzerland University of Fribourg Fribourg, Switzerland Francesco.Carrino,
Joel.Dumoulin, Elena.mugellini, [email protected],[email protected]
[12] Gabriel Pires, Miguel Castelo-Branco and Urbano Nunes, “Visual P300-based BCI to steer a Wheelchair: a Bayesian
Approach”,30th Annual International IEEE EMBS Conference Vancouver, British Columbia, Canada, August 2024,
2008
[13] Dandan Huang, “Electroencephalography (EEG)-Based Brain-Computer Interface (BCI): A 2-D Virtual Wheelchair
Control Based on Event-Related Desynchronization/Synchronization and State Control”, IEEE TRANSACTIONS ON
NEURAL SYSTEMS AND REHABILITATION ENGINEERING, VOL. 20, NO. 3, MAY 2012
[14] “Brain-Computer Interfaces & Human-Computer Interaction”, Desney Tan & Anton Nijholt, Springer-Verlag London
Limited, 2010
[15] Christian J Bell, Pradeep Shenoy, Rawichote Chalodhorn and Rajesh P N Rao, “Control of a humanoid robot by a
noninvasive brain-computer interface in humans”, DOI:10.1088/1741-2560/5/2/012
[16] Jzau-Sheng Linl, Kuo-Chi Chen, and Win-Ching Yang, “EEG and Eye-Blinking signals through a Brain-Computer
Interface Based Control for Electric Wheelchairs with Wireless Scheme”, National Chin-Yi University o/Technology
Taichung, Taiwan
[17] Kuo-Kai Shyu, “Development of a Low-Cost FPGABased SSVEP BCI Multimedia Control System”, IEEE
TRANSACTIONS ON BIOMEDICAL CIRCUITS AND SYSTEMS, VOL. 4, NO. 2, APRIL 2010
[18] Siliveru Ramesh, M.Gopi Krishna, Madhu Nakirekanti, “Brain-Computer Interface System for Mind-Controlled Robot
using Bluetooth”, October 2014
[19] Christian Mandel, Thorsten L¨uth, Tim Laue, Thomas R¨ofer, Axel Gr¨aser, and Bernd Krieg-Br¨uckner,” Navigating
a Smart Wheelchair with a Brain-Computer Interface Interpreting Steady-State Visual Evoked Potentials”, October 11-
15, 2009 USA.