Embed Size (px)
Citation preview
Microrobotic Actuation Mechanisms
Srinivas K. Prasad, MD
Johns Hopkins University
Seminar Presentation
February 22, 2001

Traditional Surgical Technique
• Surgical technique has historically required the establishment of a wide “cone of light” created over a target workspace.
• Large incisions and substantial tissue dissection became the rule for these procedures.
• Patient Morbidity and Mortality was minimized by invoking Listerian principles of Anti-Sepsis and Halsted’s principles of gentle tissue manipulation

Minimally Invasive Surgery
• Extrapolation of Halstedian principles prompted the investigation of surgical alternatives to the traditional “cone of light”
• Advances in Radiology and Fiberoptics Technology have been coupled with simple instrument redesign to enable surgeons to minimize the traumatic extent of exposure and dissection.
• The Broad Success of Minimally Invasive Surgical techniques has prompted the redesign of several surgical procedures in a variety of disciplines.
Challenges for MIS
• Full realization of the MIS vision requires substantial surgical instrument redesign.
• Traditional instrument redesigns have compromised dexterity and tactile feedback, requiring surgeons to operate within these constraints
• Harnessing the power of advances in microrobotic and haptic technologies promises to allow surgeons of the future to extend the benefits of Minimally Invasive Surgery to patients across a broader spectrum of disease.

Research Articles• Primary Article: Survey of Microrobotic syntax, design
and available technologies. Dario, P, et al., “Microactuators for Microrobots: A Critical
Survey,” Journal of Micromechanics and Microengineering, Sept 1992, pp. 141-157.
• Secondary Articles:
Monkman, G., “Micro Actuation and Memory Alloys,” Assembly Automation, vol. 16, no. 4, 1996, pp. 22-25.
Suzumori, K, et al., “Applying a Flexible Microactuator to Robotic Mechanisms,” IEEE International Conference on Robotics and Automation, 1991, pp. 21-27.
Hashimoto, M, et al., “Application of Shape Memory Alloy to Robotic Actuators,” Journal of Robotic Systems, vol. 2,
no. 1, 1985, pp. 3-25.

Syntax Microdevices: Micromachine vs. Microrobot
• Micromachine: “A device capable of generating or modulating mechanical work, without necessarily possessing any onboard control”, e.g. micromotor, microvalve or a collection of these devices in a complex, but passive, system.
• Microrobot: “A device with some form of reprogrammable behavior, or some degree of adaptivity to unpredictable circumstances or remote controllability.
SyntaxScale Considerations
• Miniature robot:– Size & Workspace: few cubic centimeters.– Forces: comparable to those applied by human operators during fine manipulation.– Interaction: Mechanical– Fabrication: Conventional techniques for fabrication of components scaled down to
miniature level.
• Microrobot:– Size & Workspace: few cubic micrometers– Forces: much smaller for tasks like manipulation of cells and nanorobots– Interaction: Mechanical, Electromagnetic Field, Chemical– Fabrication: ‘Modified Chip’ design utilizing silicon micromachining technologies for
fabrication of micromotors, sensors and processing circuitry.
• Nanorobot:– Size & Workspace: few hundred nanometers– Forces: Infinitesimal– Interaction: Principally Chemical– Fabrication: Nanoscale fabrication techniques for development of molecular mechanical
components; Polymer chemistry techniques
• We will collectively refer to these as Microrobots.
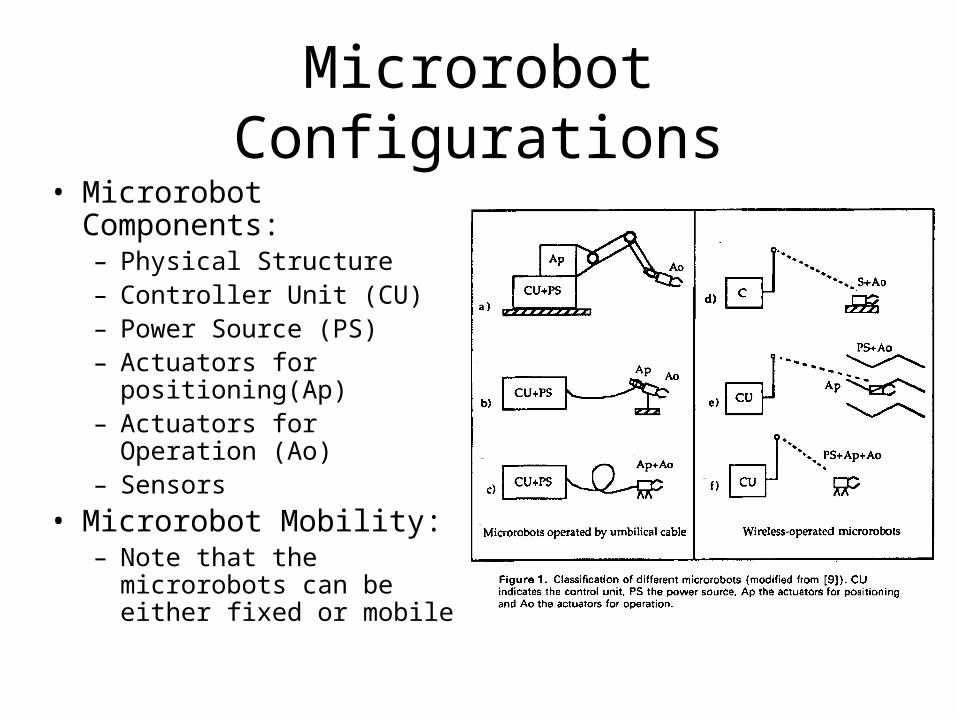
Microrobot Configurations• Microrobot Components:
– Physical Structure– Controller Unit (CU)– Power Source (PS)– Actuators for
positioning(Ap)– Actuators for Operation
(Ao)– Sensors
• Microrobot Mobility: – Note that the microrobots
can be either fixed or mobile
Design Considerations
• These follow from the components and configurations outlined on the previous slide:– Degree of autonomy– Control Mechanisms– Energy Sources– Actuation Mechanisms– Positioning sensor requirements– Haptic Feedback requirements
General Microactuation Considerations
• Electromagnetic Motors – exhibit significant limitations when miniaturized as
a consequence of decreased magnetic flux density– Require reduction gears to generate useful
torques, but these are difficult to fabricate and couple at this scale and they have limited reliability.
• Microactuation Alternatives– Electrostatic Motors– Shape Memory Alloy Mechanisms– Piezoelectric Mechanisms– Rubber Microactuators

Actuator Characteristics

Actuator Characteristics
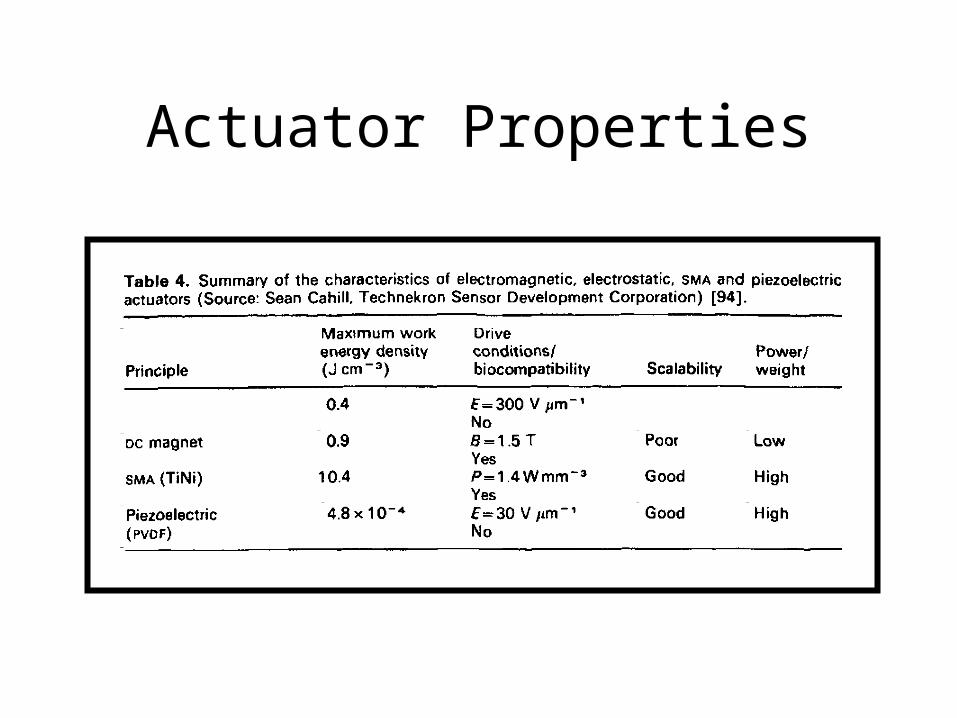
Actuator Properties

Electrostatic Actuators• While Electromagnetic Motors are the
flagship actuators of macrorobots, Electrostatic Motors have a number of advantages in a microrobotic context:– Easily fabricated on silicon wafers– High electric fields can be achieved using sub-
micron air gaps– High rotation speeds can be achieved– Control Circuitry can be built onto the same chip– Electrostatic force scales down very favorably– Can be batch fabricated and coupled on the same
chip

Shape Memory Alloy• SMA is a device that converts thermal energy
into Kinetic Energy as a fundamental property of the alloy, e.g. TiNi
• In particular, these alloys are capable of regaining, either fully or partially, a previous conformation when heated above a characteristic ‘transition temperature’. This is called the Shape Memory Effect.
• SME is a ‘thermoelastic transformation’ from a ‘martensitic phase’ at low temperature to a ‘austenitic phase’ at high temperature.

Properties of SMA
• Advantages:– SMA’s are very compact, allowing for reduction in
overall actuator size.– Very high power/weight ratio comparatively– Can provide both structural integrity and actuation
mechanisms, reducing complexity– Accessible voltages can accomplish thermoelastic
transformation– Electrical Resistance difference between two
states can be used as a sensing element to monitor actuator position and force.
Properties of SMA
• Disadvantages:– Very poor efficiency; Theoretical efficiency
ceiling is 10% (Carnot Cycle calculation) but practical efficiency seldom exceeds 1%.
– Need Mechanism for cooling SMA– Regained Conformation with cooling is less
predictable

SMA ExamplesMEDIWORM

SMA ExamplesMollusc Type Catheter

Piezoelectric Mechanisms• Piezoelectric devices are
based on conversion of electrical energy into mechanical energy through the piezoelectric effect.
• Ceramics come in a variety of shapes and configurations.
• Good for generating displacements but of limited utility for exerting operative level forces as a consequence of low work energy density

Rubber Microactuators
• Driven by Electropneumatic or electrohydraulic systems.
• Easy to miniaturize• Many degrees of
freedom based on design
• High power density• Smooth behavior

Conclusion
• The frontiers of Minimally Invasive Surgery are rich with possibility as we approach the problem of microrobotic instrumentation from many directions.
• It is clear that there are many actuation options worthy of investigation and we hope to explore the SMA domain to develop one novel solution in the treatment of Pelvic Osteolysis.









![DTIC · 2011-05-14 · [Srinivas b] SRINIVAS, Y. V. Deriving parsing algorithms using sheaves. In 0 Preparation. [Srinivas 92] SRINIVAS, Y. V. Derivation of a parallel matching algorithm](https://img.pdfslide.us/doc/110x75/5f8689e2fffa8812255e2550/dtic-2011-05-14-srinivas-b-srinivas-y-v-deriving-parsing-algorithms-using.jpg)