-
7/28/2019 Microbeast 3.0.2 Eng
1/88
1
INSTRUCTION MANUAL
-
7/28/2019 Microbeast 3.0.2 Eng
2/88
-
7/28/2019 Microbeast 3.0.2 Eng
3/88
BEASTXb e A b S O L U T e S T A b L e
INSTRUCTION MANUAL
-
7/28/2019 Microbeast 3.0.2 Eng
4/884
CONTENTS
CONTeNTS 4SAFeTY NOTeS 6GeNeRAL INFORMATION 81 INTRODUCTION 92
bOX CONTeNT 10
3 MOUNTING AND CONNeCTION 113.1 Mounting the MICROBEAST unit . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . .113.2 Preparing a transmitter or ybarless .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . .123.3 Servo connections and auxiliary channels
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . .13
4 Rcivr connction 144.1 Connection o a standard receiver . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . .154.2 Use o single-line receivers . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . .18
5 Rcivr typ stup 245.1 Receiver type choice (receiver menu
pointA) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . .245.2 Input channel assignments (receiver menu
pointsB -H) . . . . . . . . . . . . . . . . . . . . . . . . . . .
.265.3 Programming the Failsae (receiver menu pointN) . . . . . . .
. . . . . . . . . . . . . . . . . . . . . .31
6 SeTUP PROCeDURe OVeRVIeW 326.1 Setup menu . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . .346.2 Parameter menu .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . .346.3
Example: Selection within the menus . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 356.4
Switching to the next menu point . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .35
7 SeTUP MeNU 36AMounting orientation o the MICROBEAST . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.37B Swashplate servo requency . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.38C Tail servo center position pulse length . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40D
Tail servo requency . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. .41E Setting the Tail rotor endpoint . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. .43
F Setting the Tail sensor direction . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.45G Adjusting the swashplate servo centering . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . .47H
Swashplate mixer . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . 49
-
7/28/2019 Microbeast 3.0.2 Eng
5/885
I Setting the swashplate servo directions . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .50J
Teaching the cyclic pitch geometry . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .51K
Adjusting the collective pitch range . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53L
Adjusting the cyclic swashplate limit . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 54M Setting
the swashplate sensor directions . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . .55N Setting the
pirouette optimization direction. . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . .58
8 DIALS AND TAIL GYRO GAIN 608.1 Swashplate: cyclic gain (Dial
1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .608.2 Swashplate: direct cyclic
eed orward (Dial 2) . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . .618.3 Tail dynamic (Dial 3) . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .61
8.4 Tail gyro gain (adjusted by the transmitter) . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .629
PARAMeTeR MeNU 63A Swashplate cyclic center adjustment . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . 64B Control behavior . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . .65C Swashplate pitching up compensation . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . 67D Tail HeadingLock gain . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . .68
E Stick deadband. . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . .70F Tail torque precompensation (RevoMIX) . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.71G Cyclic response . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . .72H Pitch boost . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .73
10 THe FIRST FLIGHT 74
11 VeRSION DISPLAY 76
12 TROUbLe SHOOTING 77Lgal trms 81
Disclaimr 81
Copyrights 81
Dclaration o conormity 81
M I C R O b e A S T o v r v i w 8 2
Adjustmnt options - ovrviw 83
My srvo stup 84
-
7/28/2019 Microbeast 3.0.2 Eng
6/886
SAFETY NOTES
Radio controlled (R/C) helicopters are not toys! The rotor
blades rotate at high speed and pose
potential risk. They may cause severe injury due to improper
usage. It is necessary to observe common
saety rules or R/C models and the local law. You can gather
inormation rom your local R/C model
club or rom your national modelers association.
Pay attention to your own saety and the saety o other people and
property in your vicinity when
using our product. Always y in areas away rom other people.
Never use R/C models in close proximi-
ty to housing areas or crowds o people. R/C models may
malunction or crash due to several reasons
like piloting mistakes or radio intererence, and cause severe
accidents. Pilots are ully responsible or
their actions, and or damage or injuries caused by the usage o
their models.
The MICROBEAST-System is not a ying aid or beginners! It
replaces the conventional mechanical
ybar on most R/C helicopters. It is absolutely necessary that
you have ying experience and that you
are experienced in the operation o R/C helicopters. Otherwise we
suggest you to seek the support o
an experienced helicopter pilot beore you undertake the rst ight
o your model. Additionally, ight
training with a R/C simulator can help make ying easier and more
enjoyable. Ask your local dealer i
you need technical support or i you observe problems during the
usage o our system.
Please read the ollowing instructions thoroughly beore the rst
use o your MICROBEAST and
setup the system careully according to this manual. Allow
sucient time or the setup procedure and
check each step careully. Watch or a mechanically clean and
proper build o your helicopter. A wrong
system setup can lead to a serious accident and damage to the
model.
-
7/28/2019 Microbeast 3.0.2 Eng
7/88
7
Radio controlled (R/C) models consist o several electrical
components. It is thereore necessary to
protect the model rom moisture and other oreign subtances. I the
model is exposed to moisture this
may lead to a malunction which may cause damage to the model or
a crash. Never y in the rain or
extremely high humidity.
Do not expose the MICROBEAST-System to extreme variations in
temperature. Beore powering up
the system, wait some time so that the electronics can
acclimatize and any accumulated condensation
is able to evaporate.
MICROBEAST consists o highly sensitive electrical components
with limited capability to operate
with excessive vibrations or electrostatic discharges. I you nd
such disturbances in your model, the
use o MICROBEAST should be postponed until the problems have
been xed.
When operating the helicopter with a MICROBEAST ensure there is
a suciently large and stable
receiver power supply. Because o the direct coupling o the rotor
blades to the servos, without the use
o a ybar mixer, the servos are exposed to increased actuating
orces. In addition, because o the inter-
mediary electronic gyro system, the servos are driven more oten
than with traditional use.
Ths actors can mak th powr consumption incras a lot compard to a
yar hlicoptr
Particularly when operating electric helicopters with
single-line receivers, make sure that the elec-
tric motor cannot start inadvertently during the setup
procedure, i the ESC is connected directly to the
MICROBEAST. We recommend disconnecting the electric motor rom
the ESC during the setup proce-
dure. Prior the rst usage please slide the motor/pinion away rom
the main gear, then check that the
motor does not to start inadvertently when the receiver is
switched on.
-
7/28/2019 Microbeast 3.0.2 Eng
8/88
8
Plas not that ths instructions ar
only valid or th MICRObeAST rmwar Vrsion 3xx !
The delivered sotware version is printed on a sticker on the
outside o the MICROBEAST packaging.You can also read it out on a
computer by using the optional USB2SYS Interace and you can
directlyread on the MICROBEAST unit during the initialization
phase, what rmware version your MICROBEASTis running:
The MICROBEAST rst carries out a brie LED test by lighting up
all menu LEDs simultaneously, andcycling the Status-LED color. Then
or about 3 seconds, the Status-LED lights red while the menu LEDsA
-G display the rst digit o the rmware version, and the LEDsH -N the
second digit o the rm-ware version. Only th rst digit o th rmwar
vrsion is o importanc!
I only LEDB is lighting or i the display on initialization is
not as described, but ONLY a running lighto all menu LEDsA -N, then
the MICROBEAST is running an older version. In this case we
recommendupdating to the latest rmware version. I you like to
continue to use the older rmware version, youmust also use the
appropriate instructions and not this manual!
You will get more inormation about the version display in
section 11 o this manual.
Firmwar vrsion 3xx
On the rst column LEDsA andBmust light corresponding to digit
3.LEDsH -N are irrelevant or the purposes o this instruction
manual.
GENERAL INFORMATION
-
7/28/2019 Microbeast 3.0.2 Eng
9/88
9
1. INTRODUCTION
Dar customr, thank you or choosing th MICRObeAST!
MICROBEAST is an easy to use three axis gyro system which makes
it possible to y R/C helicopterswithout a mechanical ybar. This
brings a boost in power as well as longer ight times and makes
itpossible to adapt the agility and ying behavior o your helicopter
to your individual preerence.
The MICROBEAST has a built-in high end tail gyro based on the
latest MEMS Technology which givesyour helicopters tail perect
stopping behavior and constant rotation rate during any
manoeuvers.
The MICROBEAST can be used in nearly any size o helicopter,
using either electric motors or nitro en-gines or propulsion. It
provides ight stability or beginners and maximum agility and
precision orintermediate and proessional pilots.
Nevertheless, the MICROBEAST is not a ying aid or beginners! I
you are inexperienced with modelhelicopters, please consult an
experienced pilot or help with setup and your rst ights.
The ollowing manual will lead you step by step through the setup
procedure rom the correct moun-ting o the unit up to the rst ight.
Please read the ollowing instruction manual thoroughly. You willsee
that during the development o the MICROBEAST, that our ocus is to
user riendly and soon youwill be able to operate the system
intuitively.
The included overview map o the setup menu can be taken out to
the ying eld as a quick reerenceto the various menu options.
Check our website WWWbeASTXCOM where we will inorm you about the
latest updates and down-loads.
Now have un and a good time using MICROBEAST!
Sincrly, th beASTX-Tam
-
7/28/2019 Microbeast 3.0.2 Eng
10/88
-
7/28/2019 Microbeast 3.0.2 Eng
11/88
11
3. MOUNTING AND CONNECTION
31 Mounting th MICRObeAST unit
Attach the MICROBEAST unit by using one o the provided gyropads
at apreerably low vibrating position on your helicopter such as the
gyro platorm orreceiver platorm. You may also need to choose
another type o mounting paddepending on the vibration pattern o
your helicopter. Ask you MICROBEASTdealer.
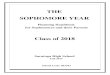
The MICROBEAST unit can be attached at or upright, and even
upside downunder the helicopter. Howvr, th srvo connctor pins must
always pointtoward th ront (or rar) o th hlicoptr
Pay attention that th dgs o th MICRObeAST unit ar all paralll
with thcorrsponding axs o th hlicoptr! And be sure that the
mounting platorm is perpendicular tothe main shat!
Longitudinal
axis
Connectors parallel
to the longitudinal axis
Fig. 1
Fig. 2
-
7/28/2019 Microbeast 3.0.2 Eng
12/88
12
32 Prparing a transmittr or yarlss
(This step is unnecessary when using the MICROBEAST with the
optional cable or stand-alone tail gyro use.
Please see 4.1.2)
First create a new model in your radios model memory. When using
the MICROBEAST you have to disableany mixing unctions or the
swashplate or tail. Each unction should be assigned to just one
receiver chan-nel. As you see our requirement or the transmitter is
very low.
Be sure that all trims and sub trims are disabled and that all
servo travel are 100% (increasing or decreasingthe servo travel or
aileron, elevator and rudder can later adjust the maximum control
rates, see chapter 9-B ).
Never enable your radios eCCPM mixing unction: this will be done
by the MICROBEAST. Always set yourradios swash mixer to mCCPM
(mechanical mixing) which is oten called H1 or 1 servo mixing.
Do not adjust the pitch curve at the moment. For the setup
procedures, it has to be set as a straight line rom-100% to +100%
(or 0 to 100% depending on radio brand).
Again make sure that there are no mixing unctions active (or
example revo-mixing).
Other unctions such as throttle curves, ESC switches or
auxiliary unctions can be adjusted as usual.
-
7/28/2019 Microbeast 3.0.2 Eng
13/88
13
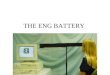
33 Srvo connctions and auxiliary channls
In slot CH1 is the elevator servo. With electronic swashplate
mixing the two roll servos have to be con-nected to CH2 and CH3,
with a mechanical mixed head (H1) the roll servo connects to CH2
and pitch
servo to CH3. The tail servo is always connected on CH4.
Dont plug th srvos into th MICRObeAST yt! Th corrct srvo typ and
appropriat drivingrquncy has not yt n slctd in th Stup mnu We
recommend not installing the servohorns yet as the servos could
bind and get damaged on rst power up.
When you route the wire leads in your model make sure that there
is no tension passed to theMICROBEAST. Make sure that the
MICROBEAST is able to move reely, so no vibrations getpassed onto
the unit.It is not recommended to bundle or tie down the leads clos
to the MICROBEAST.On the other hand the wires must be attached so
that they are unable to move the MICROBEASTduring the light. In
particular, do not use any shrink tubing or abric hose to bundle or
encase
the wiring in close proximity to the point at which the cables
are plugged into the Microbeast.This makes the cable sti and
inlexible and can cause even the slightest vibrations are
trans-mitted to Microbeast.
At this point w would lik to point out that th corrct
dimnsioning o rcivr powr supply is vryimportant (beC and attry
currnt rating, numr o supply cals, cal diamtr, cal lngth )For
yarlss hlicoptrs, th load on th srvos and th rsulting powr
consumption is signicant-
ly highr than or hlicoptrs with a yar! Also th srvos ar
constantly in motion whn usd withan lctrical control systm
Fig. 3
CH1
CH
120
CH1
CH2 CH3
140
CH1
CH2 CH3
Flightdirection
90
CH1
CH H32 C2 C
H3CH
mechanical mixing electronic mixing
-
7/28/2019 Microbeast 3.0.2 Eng
14/88
14
4. RECEIvER CONNECTION
In relation to the control o MICROBEAST you have the opportunity
to use diferent types o receivers.It is distinguished between
conventional standard receivers and socalled single-line
receivers:
A standard rcivr is a receiver that is connected to the
MICROBEAST by using any single servo output othe receiver to
connect the ve control channels between MICROBEAST and receiver.
The channel whichdetermines the controlled unction simply is
selected by inserting each plug to the correct output at
thereceiver. In section 4.1.1 it is shown how to exactly connect
the receiver to the MICROBEAST when using theMICROBEAST as ybarless
system. In addition the use o MICROBEAST is possible as a
stand-alone tail gyro.See section 4.1.2 to learn how to connect
receiver and MICROBEAST in this case.
When using a singl-lin rcivr all channels are transmitted by one
single connection line to theMICROBEAST. Because o this, it is not
possible here by inserting the appropriate plugs in the receiver
toassign unctions to the MICROBEAST. This must be done by a specic
setting in the MICROBEAST (describedin chapter 5).Also single-line
receivers similar to standard receivers with additional single
channel connectors areavailable. Thereore you only have to treat
such receivers as single-line receivers in combination
withMICROBEAST i you really use this unction.
How diferent types o single-line receivers are connected to the
MICROBEAST is described in section 4.2.
Use as a stand-alone tail rotor gyro in single-line mode is
possible under certain circumstances,but not intended and thereore
is not described urther in the ollowing.
-
7/28/2019 Microbeast 3.0.2 Eng
15/88
15
41 Connction o a standard rcivr
411 Flyarlss usag
Now plug the receiver cables or aileron, elevator, pitch, rudder
and tail gain between the MICROBEASTand the receiver. To nd out the
channel assignments o your remote control receiver, please reer
tothe user manual o your transmitter or contact its
manuacturer.
To connect lvator and ailron, use the plain 3-wire cables that
transmit the control signal in
addition to the power supply rom the receiver to the
MICROBEAST.Pitch (red), tail (orange) and gain (brown) have only
one lead or the control signal on the receiver side, andare
connected to the MICROBEAST on the combined connector. Please
ensure these plugs are connectedcorrectly to the receiver. Although
the cable color is diferent, all three wires are signal lines,
which go to theusual orange, yellow or white side! + and - remain
open on theses channels.
Please respect the polarities or the plugs going to the
MICROBEAST. The orange line on the MICROBEASTmust always be on the
top and the brown on the bottom. Also sur whn insrting th
connctors
not to accidntally plug thm into th spac nxt to th pins or
vrtically ofst y on pin
Other wires such as throttle servo, ESC or power supplies are
connected as usual to the remote controlreceiver.
Elevator
Aileron
Elevator servo
Aileron servo 1
Aileron servo 2 / Pitch
Tail servo
Ruddr (orange)Pitch (red)
Tail Gain(brown)
re
ceiveroutputs
Fig. 4Top
-
7/28/2019 Microbeast 3.0.2 Eng
16/88
-
7/28/2019 Microbeast 3.0.2 Eng
17/88
17
412 Usag as stand-alon tail gyro
The MICROBEAST can also be used as high-end stand-alone tail
gyro. This requires the use o a special patchcable which can be
purchased separately. This ensures that the MICROBEAST is provided
with power andthat the signals or rudder and tail gain are
available rom the receiver.
The signal lead with the orange and yellow wires must be
connected to the slot[ Aux | Pit | Rud ]. The orange wiremust be
closest to the topside o the MICROBEAST.
The power lead must be plugged into the slot [ eLe | DI1 ]. The
brown wire (negative or ground) is on thebottom, the red wire
(positive or power) should be in the middle position. Connect the
tail servo to [ CH4 ].
I using th MICRObeAST as stand-alon tail gyro only th mnu
pointsA,C,D,E andFnd
adjustd in stup mnu All othr mnu points can skippd
To avoid damage to the tail servo, rst setup menu pointsC
andDwhich are tail servo pulse and requency,prior to connecting the
servo.
Tail servo
Rudder
Tail gyro gainReceiverouputs
Fig. 6
Top
-
7/28/2019 Microbeast 3.0.2 Eng
18/88
18
42 Us o singl-lin rcivrsThe MICROBEAST enables the use o
conventional receivers with individual channel outputs or the use
ospecial receivers which output the channel signals as a merged
single-line signal. These include Spektrumsatellite receivers, PPM
composite signal receiver (e.g. Futaba SP Series receiver or the
satellite receiver rom
Jeti ), receivers with Futaba S-BUS as well as receivers with
SRXL compatible data output (e.g. SRXL-Multiplex or BEASTRX).
421 Gnral nots
When operating with single-line receivers (Spektrum satellite
receiver, PPM composite signal receiver- e.g. Futaba SP-series or
the satellite receiver rom Jeti, receivers using Futaba S-BUS,
SRXL
compatible receivers), the throttle servo/motor controller can
be connected to [CH5] on theMICROBEAST. When using a motor
controller or electric models with a BEC this slot then also will
besupplying the MICROBEAST, the servos and the receiver with
power.
We recommend i possible (e.g. on all receivers that have normal
servo connectors together with singleline output) to connect the
throttle servo/motor controller directly to the receiver to benet
rom thenative Failsae/Hold unctions. Although the MICROBEAST also
has adjustable Failsae or [CH5] this will
only be activated when the connection between MICROBEAST unit
and receiver ails but not orexample in case o signal loss between
transmitter and receiver.
On slot [DI2 | CH7 | CH6] another auxiliary channel is available
on the top pin [CH6], or example tohook up a governor or nitro
engines. Please note that this slot is only issuing a control
signal and hasno power. For this reason a servo cannot be plugged
here directly. The two lower pins [DI2] and [CH7]are reserved or
other applications. Nvr connct a powr sourc on thos two pins: this
could
damag th MICRObeAST!
In the case o an electric model i the ESC has a second BEC
output or when using a bufering batterythis wire can be connected
to the [SYS] terminal or (i possible) plugged directly into the
receiver.
On models with a separate power supply this can only be
connected to the MICROBEAST on slot [SYS].Thereore please ensure
adequate sizing o the supply lines, especially with large models. A
secondpower connection can be derived to the receiver or, by using
a Y cable, you can inject a parallel powersupply to one o the servo
outputs. When using very powerul servos you might even consider
using aseparate voltage regulating unit that the servos can be
connected to.
-
7/28/2019 Microbeast 3.0.2 Eng
19/88
19
422 Spktrum Satllit rcivr
To connect a Spektrum satellite (remote) receiver on the
MICROBEAST a special optional adapter isrequired. This adapter is
connected to the [DI1] input o the MICROBEAST. Please observe
correctpolarity, the orange signal line must be next to the cover.
The cable or the Spektrum satellite receiver
is then plugged into this adapter.
Fig. 7
Top
CH5 throttle servo/ESC and power supply
Elevator servo
Aileron servo
Aileron / pitch servo
Tail servo
Power supply
CH6 additional channel
Optionaladapter
SPEKTRUMSatellite receiver
Th us o MICRObeAST with a singl Spktrum satllit rcivr is allowd
only on micro ormini hlicoptrs (450 siz hlicoptrs) caus o th limitd
rang du to th lack o antnnadivrsity!
-
7/28/2019 Microbeast 3.0.2 Eng
20/88
20
binding procdurIn the case o using a Spektrum satellite receiver
it is very important to bind the receiver irstbeore programming the
MICROBEAST. This stp is ssntial to prorm, even i the satellite
wasalready in use elsewhere (e. g. in connection with a standard
Spektrum receiver) and was already
bound to the transmitter earlier.
To bind a satellite receiver, it must be connected via the
adapter to the MICROBEAST.
Simultanously with th inding procss, th typ o satllit rcivr has
to st, iwhthr it is a DSMX or DSM2 satllit (Th actual slctd signal
protocol in th transmittr
is not rlvant!) It is vry important to choos th corrct typ o
satllit rcivr hr,sinc an impropr stting may sm to work ut can lad
to radio intrrnc or total losso th link in th susqunt opration!
Insert a Spektrum Bind Plug in the [SYS] slot on MICROBEAST.In
cases where power is supplied exclusively by the [SYS] Connection,
to bind a Spektrum satellite re-ceiver, the power supply must be
provided temporarily through any o the servo port (CH1 - CH5).
To select a DSM2 satellite and to enter bind mode, simply switch
on the power supply now. TheLED on the receiver and LEDN on the
MICROBEAST will start to ash. You can bind the transmitteras usual
(or more inormation reer to the instructions o your radio control
system).
To select and bind a DSMX satellite, hold down the button on the
MICROBEAST while switchingon the power supply. Now the receivers
LED and LEDH (!) on the MICROBEAST will ash and youcan release the
button and bind the receiver with your transmitter.
Ater successul binding procedure the receivers LED will stay
solid. LED H respectivelyN ash
alternately to all other LEDs. Now switch of the power supply
and remove the bind plug. Nowcontinue with receiver type setup (see
next chapter).
Note: It makes no dierence i you pull o the Bind Plug during the
binding process or leave it
connected as you would expect rom some standard Spektrum
receivers.
Watch out that th motor can not start accidntally whn using th
beC of your spd controllrto powr th unit!
hold down button release button
-
7/28/2019 Microbeast 3.0.2 Eng
21/88
21
Dcisiv for th slction alon is, which typ of satllit rcivr is
pluggd in! It is irrelevantwhich transmission method between the
receiver and transmitter is actually used.
Chck carully what typ you us Crucial is the rmware on the
satellite not its look! An incorrect
setting is not obvious, but later will lead to malunction or
ailure o the connection.
Bind Plug
Bind Plug
DSM2 - satellite
switch on power supply
LEDH ashes
LEDN ashes
DSM2 satellite selected
DSMX satellite selected
power supply
(either on CH1 - CH5)
Now start bindprocedure ontransmitter!
LEDH+ all menu LEDs ash
switch of
power supply
-
remove Bind PlugLEDN+ all menu LEDs ash
Fig. 8
DSMX - satellite
power supply(either on CH1 - CH5)
4 2 3 Conncting singl lin rcivrs without additional srvo
outputs
-
7/28/2019 Microbeast 3.0.2 Eng
22/88
22
423 Conncting singl lin rcivrs without additional srvo outputs(g
PPM composit signal rcivrs)
For the connection o PPM composite signal receivers there is
usually no special adapter required. Inmost cases (e.g. Futaba
-receivers o the SP-series) the receiver can be connected to the
MICROBEAST
with one o the supplied regular 3-wire cables. For some
receivers, the connecting cable is also alreadyxed to the receiver
(e.g. Jeti satellite receiver).
I not xed to the receiver, plug the cable into the output o the
digital composite signal o your receiver,usually labeled with SIG
or the like. Again pay attention to correct polarity. Be careul,
since the sup-plied cable is designed to be used universally, and
the usual Futaba polarity protection tab is mis-sing.
Plug the other end o the cable into the MICROBEAST input [DI1].
Make sure the polarity is correct; theorange signal line must be
next to the MICROBEAST top cover.
Fig. 9
Top
CH5 throttle servo/ESC and power supply
Elevator servo
Aileron servo
Aileron/pitch servo
Tail servo
Power supply
CH6 additional channel
PPM compositesignal Receiver
424 Connction o singl lin rcivr with additinal srvos connctors
(g S-bus, SRXL)
-
7/28/2019 Microbeast 3.0.2 Eng
23/88
23
424 Connction o singl lin rcivr with additinal srvos connctors
(g S bus, SRXL)
Connect the receiver to the MICROBEAST with one o the supplied
regular 3-wire cables. Plug the cable intothe MICROBEAST input
[DI1] and the other to the receiver to the output [S. BUS] or [B |
D] or Multiplex.
Please make sure that the connectors are plugged in with the
correct polarity. Be careul, since the suppliedcable is designed to
be used universally, and the Futaba polarity protection tab
missing. On the MICROBEAST,the orange signal wire must be close to
the top cover.
This dscription also applis to othr singl lin rcivr with
additinal srvos connctors (g SRXLrcivrs (Multiplx or beASTRX)):
Fig. 10
Top
Elevator servo
Aileron servo
Aileron/pitch servo
Tailservo
Power supply
e.g. Futaba S-BUSReceiver
Bat
S-BUS
Additional channel
Throttle servo/ESCand power supply)
We recommend to directly connect speed controller and additional
unctions to the receiver to use the Failsae /
Hold unctions o the remote control system (see 4.2.1). But you
can also CH5 and CH6 on the MICROBEAST or
these unctions!
-
7/28/2019 Microbeast 3.0.2 Eng
24/88
24
5. RECEIvER TYpE SETUp
Beside using conventional receivers, the MICROBEAST supports the
use o diferent types o single-linereceivers. These are receivers
which transmit the control signals only over one single cable
wiring. Iusing such a receiver because o the diferent signal
protocols the receiver type must be selected in the
receiver menu beore the rst use and urther steps such as
allocation o individual channels or ailsaesetting are needed. You
can see rom the yellow LED next to the lettersA -N at which
receiver menupoint you are currently in. By briey pressing the
button you can go to the next receiver menu pointwhich also saves
the current settings.
51 Rcivr typ choic (rcivr mnu pointA)To get into the receiver
menu press the button on the MICROBEAST and hold it down while you
turn onthe receiver power supply. The yellow menu LED A should now
be ashing and you can release thebutton.I you us a motor controllr
with beC, disconnct th motor or saty rasons to avoid thpossiility o
unintntional motor start up!
At menu point A where menu LED A is ashing, the color and state
o the Status-LED gives youinormation about which type o receiver is
currently selected (reer to the table below).In order to change the
type o receiver, prss and hold th utton or aout 2 sconds. The
Status-LEDwill light in the next color or eventually ash. Repeat
this as many times as required until the Status-LEDmatches your
receiver type:
Status-LeD Rcivr typ
of Standard receiver (Fig. 4,5)*
purpl Spektrum Satellite (Fig. 7)
rd fashing Futaba S-BUS (Fig. 9,10)
rd SRXL (Fig. 9,10)
lu fashing PPM - composite signal (Fig. 9,10)
*Factory Setting
Push and hold
button or
about 2 seconds
Not: By deault the use o a conventional standard receiver is
provided. Thereore it is not necessaryto call the receiver setup
menu. Skip the ollowing sub-items and proceed with chapter 6.
-
7/28/2019 Microbeast 3.0.2 Eng
25/88
25
Then press the button, but only riy, to save the setup and
switch to receiver menu pointB.I you have already briey pressed the
button by mistake and it did not change the receiver type but
switch
to menu point B, switch of the power and repeat the above
procedure.Programming xampl - operation with a Futaba S-Bus
receiver:
Hold the button down Release button
Release button
Release button
Turn Powersupply ON
Keep buttonpushed
a long time
Keep buttonpusheda long time
push buttonshortly
LEDA: ashingStatus-LED: OFF =Standard receiver
LEDA: ashingStatus-LED: fashing red=Futaba S-Bus receiver
LEDA: ashingStatus-LED:purple =Spektrum receiver
LEDB: ashingStatus-LED: blueas soon as signal is valid
Menu Point A
Menu PointBFig. 11
convntion: LED lights: LED is ashing:
Not: I selected receiver type is Standard the set up is now
complete and by briey pushing thebutton you will jump directly to
the end o adjustment procedure (all menu LEDs are ashing).Switch of
the power supply now.Another channel assignment is not necessary
and not provided since the allocation takes place byappropriate
insertion o the cables into the standard receiver. So you can
directly proceed withchapter 6.
h l B H
-
7/28/2019 Microbeast 3.0.2 Eng
26/88
26
52 Input channl assignmnts (rcivr mnu pointsB -H)
I not a standard receiver but a single-line receiver was
selected at menu pointA, it must be establishedwhich control
unction is controlled by what channel. This is necessary because
all the control unctionsare transmitted via one single line and
thus there is no possibility o plugging the cables in each
individual channel matching at the receiver.
521 Prst channl assignmnt
When selecting a specic type o single line receiver the
appropriate type o receiver channel allocationwill be preset in the
MICROBEAST. Please reer to the tables below and check i your radio
transmits thechannels in the correct order. I this is not the case,
you have to assign the channel order step by stepthrough the menu
pointsB -H (or this see section 5.2.2). To know th channl assignmnt
o your
transmittr you can chck th usr manual o th transmittr or look at
th srvo monitor o thtransmittr (i it has this atur) I in dout ask
th manuacturr o your transmittr
When using SRXL the preset channel assignment is based on the
receivers protocol version (see nextpage).
Spktrum Futaa S-bUS PPM - composit signal
transmitter channelassignment
unction unction unction
channel 1 throttle (CH5) aileron pitch
channel 2 aileron elevator aileron
channel 3 elevator throttle (CH5) elevatorchannel 4 rudder
rudder rudder
channel 5 tail gyro gain tail gyro gain auxiliary (CH6)
channel 6 pitch pitch throttle (CH5)
channel 7 auxiliary (CH6) auxiliary (CH6) tail gyro gain
-
7/28/2019 Microbeast 3.0.2 Eng
27/88
27
SRXL
beASTRX Multiplx
transmitter channelassignment
unction unction
channel 1 aileron aileronchannel 2 elevator elevator
channel 3 throttle (CH5) rudder
channel 4 rudder pitch
channel 5 tail gyro gain throttle (CH5)
channel 6 pitch tail gyro gain
channel 7 auxiliary (CH6) auxiliary (CH6)
Not: I the selected receiver type is standard another channel
assignment is not necessary andnot provided since the allocation
takes place by appropriate insertion o the cables into the
Standard receiver. Thereore menu pointsB
toN
are not accessible and the MICROBEAST jumpsater the brie press
at menu pointA to the end o the receiver menu (all menu LEDs
ashing).Power of the unit now and proceed as described in chapter
6.
I you are on receiver menu pointB, please wait until the
Status-LED lights blue.
I th Status-LeD stays rd, it means that there is no valid remote
control signal available. A channel
assignment in this case is impossible! I the Status-LED doesnt
turn blue ater a ew seconds, check i thereceiver is properly bound
to the transmitter (bind already done successully?) and that a
receiver othe correct type is selected in receiver menu point A. I
a wrong receiver type has been selected,switch of the power and
restart the receiver type setup procedure.
To load the selected standard channel assignment (see above
tables), hold the button down or sever-al seconds. The menu LED
will immediately jump to receiver menu pointN. In addition, you can
alsoload the deault settings by pushing the button or several
seconds in any o the points romC toH.
This will erase all previously made individual channel
assignments.
Release button
-
7/28/2019 Microbeast 3.0.2 Eng
28/88
28
522 Taching o customizd channl ordr
I you need a customized channel order, please rst prepare (i not
already done) your transmitter asdescribed in section 3.2 .
Additionally, mak sur (or xampl, using th srvo monitor o your
transmittr) that ach controlunction o your transmittr activats on
and only on channl This can be tricky especially orthrottle/pitch
unctions which are usually coupled by a mixer in the transmitter.
In this case set the throttlechannel quiet by using or example the
throttle hold switch or provide a at throttle curve so that the
pitchstick actually controls only the channel or the pitch servo,
but or the later, keep the possibility to controlalso the throttle
channel by ipping a switch or example.
In the ollowing 7 menu pointsB -H, you can assign diferent
unctions by simply actuating the appropriatechannel unction on your
transmitter. A blue ash o the Status-LED indicates that a channel
has beendetected. It does not matter how ar or in what direction
you move the stick or in what position the stick/switch was. Note
the channel value itsel is not important, but the change o this
value is. It is thereoreimportant that only the requested unction
is activated and not by accident several simultaneously.Otherwise,
the MICROBEAST may not recognize the allocated channel
correctly.
Hold buttona long time
LEDB lightsStatus-LED: blue
LEDN lightsStatus-LED is ashingred/blue
Menu pointB Menu pointN(Failsae setting)
Loading ostandard channel
assignment
Fig. 12
-
7/28/2019 Microbeast 3.0.2 Eng
29/88
29
I you have moved the wrong stick/switch, you can reactivate the
correct unction again. The MICROBEASTremembers only the last
unction that was operated and conrms it with blue ashing o the
Status-LED.
Press the button ater learning each unction to save the
assignment and to go to the next unction. Thebutton remains locked
until you operate a new control unction. You hav to assign vry
unction withthe exception o the last auxiliary channel CH6 (this
channel can be skipped by pressing the button withoutlearning the
unction).
Onc a channl is assignd, it is no longr availal and is ignord y
th MICRObeAST or th
rmaining procss Thus, ater learning o the pitch unction (menu
pointB) you can enable the throttleunction (remove throttle hold
and switch to a linear or V shape curve) and teach the throttle
channel byre-operating the collective stick (menu pointG). The
pitch channel is now no longer considered, as thischannel has
already been assigned previously!
Rcivr mnu point Function
B pitch
C aileron
D elevator
E rudder
F tail gyro gain
G throttle (CH5)
H auxiliary (CH6)
-
7/28/2019 Microbeast 3.0.2 Eng
30/88
30
I th Status-LeD stays rd, it means that there is no valid remote
control signal available. In thiscase, a channel assignment is
impossible! I the Status-LED doesnt turn blue ater a ew
seconds,check i the receiver is properly bound to the transmitter
(bind already done successully?) and
that a receiver o the correct type is selected in receiver menu
pointA
. I a wrong receiver type hasbeen selected, switch of the power
and re start the receiver type procedure.
by prssing th utton at rcivr mnu pointH th mnu LeD jumps dirctly
to rcivr mnupoint N
Move pitch stick
Move aileron stick
Push buttonshortly
Push button
shortly
(Learning o subsequentchannels according totable in section
5.2.2)
LEDB ashing
Status-LED: blue
LEDC ashingStatus-LED: blue
Status-LED: ashing blue
Status-LED: ashing blue
Learning opitch channel
Learning oAileron channel
Fig. 13
5 3 Programming th Failsa (rcivr mnu pointN)
-
7/28/2019 Microbeast 3.0.2 Eng
31/88
31
53 Programming th Failsa (rcivr mnu pointN)At receiver menu
pointN you have to program the ail-sae position or the throttle
channel. I during ope-ration, the received signal is interrupted,
the throttle servo / motor controller (connected to the output
CH5)is automatically reset to this ail sae position. To avoid
accidents, you should program electric motors to of
and reduce throttle on nitro helicopters to idle.
We recommend to directly connect speed controller and additional
unctions to the receiver to use the Failsae /
Hold unctions o the remote control system (see 4.2.1). But you
can also CH5 and CH6 on the MICROBEAST or
these unctions!
Set the throttle channel on your remote control to the desired
position and press the button riy. I youdid not connect a unction
to CH5, anyway press the button to complete setup.
This complts th asic rcivr stup and th MICRObeAST will go into
slp stat atr th uttonis prssd (all mnu LeDs ash) Power of the unit
and proceed as described in the next chapters.
Set throttlechannel to
ailsae position
Push buttonshortly
LEDN: ashingStatus-LED: ashing red/blue
Fig. 14
For th othr channls thr is no ail-sa programming In case o
interruption o the recei-ved signal, these channels just hold the
position corresponding to the last valid signal
(Failsae programming)
6. SETUp pROCEDURE OvERvIEW
-
7/28/2019 Microbeast 3.0.2 Eng
32/88
32
Ater powering on the MICROBEAST will initialize. During this
phas, do not mov th MICRObeAST unit or th
hlicoptr First the MICROBEAST runs a short LED test and then the
rmware version is displayed or 3 seconds. Ater
that, the running LEDsA toG show the calibration o the sensors
and the LEDsH toN the initialization o the receiver
inputs.
When the system is ready it does a short move o the swashplate
servos and the Status-LED turns blue i the tail gyro
is in HeadingLock mode or purple in Normal-Rate mode. For about
10 seconds you can see one o the LEDsA -N
light according to the current amount o tail gain.
Th programming o th MICRObeAST works in th ollowing way:
There are two menu levels. From ready mode (ight mode) you can
always get into the one or the other menulevel. A change between
the menu levels is not possible; you always have to rst get out o
the current level toenter in the other menu level. Each level
includes several setup points. The yellow LEDs next to the letters
showsat which setup point you are currently. Note that the two menu
levels have a diferent number o setup points.
ToaccesstheSetupmenuyoukeepthebuttonpressed(severalseconds)untilLEDA
stops ashing and lights upcontinuously. In this menu all the basic
settings are made to adjust the MICROBEAST to your helicopter.
ToaccesstheParametermenu,pressandholdthebuttonbrieyuntiltheLEDA
starts to ash quickly andimmediately release the button. This menu
is used to ne tune the ight characteristics and is mostly neededat
the aireld.
Whileinoneofthemenusyounormallyselectthedierentoptionsbygivinganinputwiththetailsticktothe
let or right. The momentary selected option is indicated by the
color o the Status-LED. Possible colorsare: of, purple, ashing red,
red, ashing blue and blue. On some o the menus you might have to
adjustsettings with other stick unctions.
Whileinoneofthemenus,ashortpushonthebuttonwillswitchtothenextmenupoint.Itisalsopossibletoskip
a menu point. Thereore do not move any stick while being in the
menu point you want to skip, and justpress the button once
again.
Ater the last menu point, a short press on the button will exit
the menu. Then the MICROBEAST is ready to yagain. I there is no
stick or button input or 4 minutes while being in one o the menus,
the MICROBEAST willexit the menus automatically. (This is not true
in the setup pointsD,G,I andJ to give you enough time toadjust the
mechanical setup o your helicopter).
Nvr y whil th MICRObeAST is in on o th stup or paramtr mnu!
-
7/28/2019 Microbeast 3.0.2 Eng
33/88
33
In this condition the gyro control and the stick controls are
disabled.
Status-LED:
Tail gyro mode:
of, ashing blue or blue
= HeadingLock mode
purple = Normal-Rate mode
Menu LEDs: Amount o tail gainA=0% toN=100%
(only ater powering up or when adjusting the gain)
Menu LEDs: steady on = setup menu
ashing = parameter menu
Button:
- to enter setup menu push down several
seconds until LEDA is steady on
- to enter Parameters menu push shortly
until LEDA is ashing
Dial 1: cyclic gain
Dial 2: direct cyclic eed orward
Dial 3: tail dynamic
Opration Mod
Mnu slction
Status-LED:of
purple
red ashing
red
blue ashing
blue
Button:
press shortly or next menu point
Selection by tail stick input or ailron / lvator / pitch stick
within menus as needed.
Fig. 15
61 Stup mnuFig 16
-
7/28/2019 Microbeast 3.0.2 Eng
34/88
34
62 Paramtr mnu
No Menu LED is on
Push button or about 3 seconds
Operation mode Setup menu menu pointA
Menu LEDA steady on
no Menu LED is on
Press button shortly Menu LEDA is ashing quickly
Operation mode Parameter menu menu pointA
Fig. 16
Fig. 17
63 exampl: Slction within th mnus
-
7/28/2019 Microbeast 3.0.2 Eng
35/88
35
64 Switching to th nxt mnu pointPush button shortly
Menu pointA Menu pointB
By moving the tail stick to thelet or right, you can select
thediferent options within a menupoint.
The number o possibilitiesdepends on the menu point.
of
Status-LED:
ashing blue red
purple ashing red
blue
Fig. 18
Fig. 19
7. SETUp MENU
-
7/28/2019 Microbeast 3.0.2 Eng
36/88
36
7. SETUp MENU
Beore the rst ight the MICROBEAST has to be adjusted to your
helicopter and the used components.
When the MICROBEAST shows that the system is ready, press and
hold the button down, the menu LED nextto menu pointAwill begin to
ash and then ater a while will be steady on. Now and only now you
canrelease the button. You just entered the setup menu in menu
pointA.
To leave the setup menu you have to skip through all menu points
by pressing the button several times.Ater pushing the button at
menu point N you will exit the setup menu and the system is ready
oroperation again. None o the LEDsA -N are glowing anymore (see
chapter 6).
I thr is no stick or utton input or 4 minuts, whil ing in th
stup mnu, th MICRObeASTwill xit th mnu automatically (This will not
happen during setup pointsD,G,I andJ to give youenough time to
adjust the mechanical setup o your helicopter).
Factory Rst:
To reset the MICROBEAST to actory settings, you can, at any
setup menu point, push down the button or atleast 10 seconds until
the LEDsA -N andJ quickly blink one ater the other to conrm the
reset.
Plas not that any prvious conguration is now dltd Do not attmpt
to y th hlicoptr withoutdoing th complt stup procdur again
otherwise you will crash your helicopter. Please also note that
all
servo settings are lost, thereore you should unplug the servos
and remove the servo horns beore resetting theMICROBEAST.
Th rcivr typ sttings (s chaptr 5) ar not afctd y th
rst!Conversely, i you change any settings in receiver type, the
setup menu or parameter menu are not afected.However, you have to
redo the receiver-specic settings (channel assignment and ail-sae,
see sections 5.2 to5.3).
AMounting orintation o th MICRObeAST
-
7/28/2019 Microbeast 3.0.2 Eng
37/88
37
AMounting orintation o th MICRObeAST
The MICROBEAST unit can be mounted in nearly all possible
orientations. The only restriction is thatthe plug connectors have
to point in or against ying direction (see chapter 3).
At setup menu pointA, you have to choose whether the MICROBEAST
is mounted horizontally (prin-ted surace 90 degrees to the main
shat) or vertically (printed surace in parallel with the main
shat).
The color o the Status-LED shows the currently selected
orientation:
Status-LeD Mounting orintation
rd vertical (on the side)
lu horizontal (flat)*
* Factory Setting
As already described (Fig. 18) you can switch between the two
options by moving the rudder stick toone or other direction. For
checking purposes the Status-LED will change color.
Push th utton to sav th conguration and to procd to stup mnu
pointB
Fig. 20
Status-LED: lu
Status-LED: rd
B Swashplat srvo rquncy
-
7/28/2019 Microbeast 3.0.2 Eng
38/88
38
I you do not know what th maximum puls rat tolratd y your srvos
is, plas slct not morthan 50Hz driving rquncy A highr driving
rquncy can lad to ailur o th srvos!
Analog Servos usually tolerate only 50Hz, some types up to 65Hz.
Digital servos allow usually higher re-quencies, but this has to be
veried in the servo datasheet. You may need to check with the
manuacturer
o the servos.On WWWbeASTXCOM you can nd a list o parameters or
the most common servos.
To optimize the perormance o the MICROBEAST, the rule is the
higher the better! Nevertheless i youexperience an unusually high
power consumption o the receiver power supply or i the servos get
hot,you should reduce this requency.
With high requencies, some servos run in a jerky manner,
especially the ast ones like coreless orbrushless servos. This is
due to the high update rate that the servo receives. This is not
critical and willnot impact ight perormance.
The color and state o the
Status-LED shows thecurrently selected requency:
Status-LeD Swashplat srvo rquncy
purpl 50 Hz *
rd fashing 65 Hz
rd 120 Hz
lu fashing 165 hz
lu 200 Hz
of Usr dnd
B p q y
I you are using the MICROBEAST as stand-alone tail gyro with the
optional patch cable (see section 4.2.2) itis not necessary to make
any adjustments at this setup menu point.
Setup menu pointB is or selecting the servo requency o your
swashplat srvos.
* Factory Setting
To select the desired servo requency, move the tail stick
repeatedly in one direction until the Status-LEDli h i h l
-
7/28/2019 Microbeast 3.0.2 Eng
39/88
39
The MICROBEAST can be used with nearly all available servo
types. However, the selected servos shouldbe adequate or ybarless
operation (high torque and also ast and precise).
The quality o the servos will have a direct inuence on the range
o rotor blades that can be used. Themore the servos are suited or
ybarless operation, the less important is the ybarless specicity o
therotor blades.
The use o a bad servo-rotor blade combination will lead to
several issues, ranging rom oscillations du-ring hover to unwanted
reactions in ast orward ight.
lights in the correct color.
The option usr dnd allows you to dene your own setting with the
PC sotware.
Push th utton to sav th conguration and to procd to stup mnu
pointC
CTail srvo cntr position puls lngth
-
7/28/2019 Microbeast 3.0.2 Eng
40/88
40
There is a relationship between the setting o the tail servo
center position pulse length and the tail servorequency (menu
pointD). I a pulse length is selected that does not allow a certain
requency, this re-quency is automatically reduced. The center
position pulse-setting always has priority, since a servo canrun
without problems at a too low requency but can not be operated with
an incorrect center position
pulse.
On WWWbeASTXCOM you can nd a list o parameters or the most
common servos.
The color o the Status-LEDshows the currently selected
servo center position pulselength:
At setup menu pointC you can select the pulse length or the tail
servos center position. Almost allcommercially available servos
work with 1520 s. But there are a ew special tail servos on the
market
which use a diferent center position pulse length.
To select the desired servo center position pulse repeatedly
move the tail stick in one direction until theStatus-LED glows in
the correct color.
The option user dened allows you to dene your own setting with
the PC sotware.
Push th utton to sav th conguration and to procd to stup mnu
pointD
Status-LeD Tail srvo cntr position puls lngth
purpl 960 s
rd 760 s
lu 1520 s *
of Usr dnd
* Factory Setting
DTail srvo rquncy
-
7/28/2019 Microbeast 3.0.2 Eng
41/88
41
Please note that depending on the tail servo center position
pulse length chosen at setup menu pointC, youmay not be able to
choose a requency higher than 333Hz. This also applies to the usr
dnd setting whichmight be limited to 333Hz (see also note at setup
menu pointC).
I you do not know what th maximum rquncy tolratd y your srvo is,
plas slct not morthn 50Hz A highr rquncy can lad to ailur o th
srvos!
Analog Servos usually tolerate only 50Hz. Digital servos usually
allow higher requencies, but this has tobe veried in the datasheet
o the servo. You may need to check with the manuacturer o the
servos.
On WWWbeASTXCOM you can nd a list o parameters or the most
common servos.
As with the swashplate servos at setup menu point B you can
select at setup menu point D therequency or the tail servo.
To optimize the perormance o the MICROBEAST tail gyro, the rule
is the higher the better!A good rudder servo should be capable o
running at least 270Hz.
By moving the tail stickrepeatedly in one direction youcan
choose the desired tail servorequency.
Status-LeD Tail srvo rquncy
purpl 50 Hz *
rd fashing 165 Hz
rd 270 Hz
lu fashing 333 Hz
lu 560 Hz
of Usr dnd
* Factory Setting
-
7/28/2019 Microbeast 3.0.2 Eng
42/88
42
Fig. 21
The option usr dnd allows you to dene your own setting with the
PC sotware.
Next attach a servo horn to the tail servo in such a way that
the tail linkage rod orms a 90 degreeangle to the servo horn (or as
close as possible) and then adjust the linkage rod as described in
themanual or your helicopter. For most helicopters the tail pitch
slider should be centred and the tail rotorblades will then have
some positive pitch to compensate or the torque o the main
rotor.
Not: This menu item will not be let automatically ater 4
minutes, so you have plenty o time to adjustthe mechanical
setup.
Push th utton to sav th conguration and to procd to stup mnu
pointE
E Stting th Tail rotor ndpoint
-
7/28/2019 Microbeast 3.0.2 Eng
43/88
43
Pay attntion that th strd dirction o your tail stick corrsponds
to th dirction your hlicoptr shouldturn I this is not th cas, us
your transmittrs srvo rvrsing unction or th tail stick I your not
sur
in which dirction th hlicoptr should rotat consult th manual or
your hlicoptr
At setup menu pointE you adjust the best possible servo throw or
your tail rotor. This best throw isdetermined by the maximum
possible control travel o the tail mechanism or based on the
maximumallowed angle o attack o the tail rotor blades, that will
not lead to an aerodynamic stall o these bla-des. Such stalls can
cause very bad stopping behavior.
To adjust the limits, move the tail stick in one direction until
the servo reaches the maximum end pointwithout any binding or stall
and release the tail stick. The urther you move the tail stick the
quicker theservo will steer into the given direction. I you move
the servo too ar you can steer the stick to theopposite direction
and move the pitch slider a short way back.Once you adjusted the
maximum endpoint dont move the tail stick anymore and wait or the
Status-LED to ash and then light steady red or blue, depending on
the adjusted direction. Now you havesaved the servo limit or one
direction.
Fig. 22
Red or blue
-
7/28/2019 Microbeast 3.0.2 Eng
44/88
F Stting th Tail snsor dirction
-
7/28/2019 Microbeast 3.0.2 Eng
45/88
45
I this is not the case you have to reverse the sensor direction.
This happens by moving the tail stickonce into any direction. For
conrmation you will see that the Status-LED will change its
color.
At stup pointF, you can nd this out vry asily:
The gyro always tries to steer in the opposite direction o the
rotation that is applied to the helicopter.
I you move the helicopter by hand around its vertical axis, the
gyro must actuate a tail servo movement tocompensate this rotation.
I or example you move the nose o the helicopter to the right, the
gyro has to
steer let the same way as you would steer let with the rudder
stick (see g. 24)
Here you have to check i the MICROBEASTs tail gyro does
compensate into the right direction.
Status-LeD Tail Snsor dirctionrd normal *
lu reversed
* Factory Setting
Once again repeat the test as described above. The MICROBEAST
should now correct in the right way:
-
7/28/2019 Microbeast 3.0.2 Eng
46/88
46
I using the MICROBEAST as a stand-alone tail gyro with the
optional patch cable (see chapter 3.5) youdo not have to do any
urther adjustments within the setup menu. Push the button
repeatedly to skipthe ollowing setup menu points until no menu LED
is on anymore and the system is ready or operation.
Push th utton to sav th conguration and to procd to stup mnu
pointG
wrong corrct
rotationrotationsteeringdirectio
n
steeringdirection
Fig. 24
G Adjusting th swashplat srvo cntring
-
7/28/2019 Microbeast 3.0.2 Eng
47/88
47
Not:This menu item will not be let automatically ater 4 minutes,
so you have plenty o time to adjust
the mechanical setup.
You can switch back and orth between the servos as oten as you
need, and also switch back to the
zero position or reerence anytime. The already adjusted servo
centers will not be lost doing this.
Not that only th adjustd srvo positions ar important and gt
stordThose which have been setwith the corresponding Status-LED
colors. The Status-LED of only serves or reerence and to plug the
servohorns in the best position. For instance, i you install or
replace the servos in the model.
When entering setup menu pointG connect all swashplate servos as
described in chapter 3.3. They nowwill be running to their zero
position (1520 s) what we call reerence position here when the
Status-LED isof.
This reerence position is used to mount the servo horns on the
servos so that they orm as much as possiblea 90 degrees angle to
the linkage rod. Usually this will not work out perectly depending
on the servos geartrain and the servo horn, thereore you can adjust
electronically every single servo in the next steps. Later,you can
come back anytime to this reerence position (when the Status-LED is
of) or checking themechanical setup..I you move the tail stick to a
single direction once, you can select one servo and change its
center positionby moving the elevator stick back and orth. Every
color o the Status-LED is corresponding to a specicservo channel
that is indicating its selection by a short up and down move.
Status-LeD Function
of Swashplate servos at reerence position
purpl CH 1 elevator servo center adjust
rd CH 2 roll (1) servo center adjust
lu CH 3 roll (2)/ pitch servo center adjust
I you move the tail stick onceagain in the same direction as
beore you can select the nextswash servo and adjust its
centerposition as mentioned.
Now adjust the linkage rods according to your helicopter manual.
The swashplate should now be at themidpoint and perpendicular to
the main shat and the rotor blades should have 0 degrees o
pitch.
-
7/28/2019 Microbeast 3.0.2 Eng
48/88
48
Always work this out rom bottom (servos) to top (blade
grips).
Also lvl and phas th swashplat drivr in th corrct way
At 0 degrees o pitch the swash driver arms must be horizontal
and the linkage balls o the blade gripshave to be perpendicular to
the spindle shat.
Push th utton to sav th conguration and to procd to stup mnu
pointH
Fig. 26
Fig. 25
H Swashplat mixr
-
7/28/2019 Microbeast 3.0.2 Eng
49/88
49
At setup menu pointH you can choose the electronic swashplate
mixer your helicopter requires or choosemechanical or switching o
the electronic swashplate mixer i your helicopter has a mechanical
mixer. Forthe electronic mixer, the MICROBEAST supports 90, 120 and
140 swashplates. Besides these choices, youcan set any swashplate
geometry with the PC sotware and mechanical or switching of the
electronicswashplate mixer option.
Which kind o CCPM your helicopter uses can be read in the manual
or your helicopter.
The color and state o the Status-LED shows the currently
selected mixing type:
Status-LeD: of purpl rd fashing rd lu fashing lu
swashplat mixr usr dnd mechanical 90 120 * 140 140 (1=1)
I your hlicoptr rquirs an lctronic swashplat mixr y no mans us
your
transmittrs swashplat mixr unction!The mixing is all done by the
MICROBEAST. Deactivate the swashplate mixing in your transmitter
orprogram it to mechanical mixing oten called H1 or 1 servo even i
your helicopter requireselectronic mixing (also see section
3.2).
Push th utton to sav th conguration and to procd to stup mnu
pointI
* Factory Setting
usr dnd mchanical 90 120 140 140 (1=1)
Fig. 27
I Stting th swashplat srvo dirctions
-
7/28/2019 Microbeast 3.0.2 Eng
50/88
50
At setup menu pointI, you adjust the correct swashplate servo
directions. To acilitate this setup, youdont need to adjust every
servo by its own, but just try the 4 possible combinations.
Move the pitch stick and check i the swashplate moves
horizontally up and down. The direction itselis not yet important.
I one or more servos are not running in the right direction, just
choose anothercombination by giving a short rudder input. Repeat
this rudder input until all servos are running in thesame
direction.
Chck now, i your control dirctions o ailron, lvator and pitch ar
corrct I this is not thecase, you have to use the srvo rvrs atur o
your transmitter to reverse the appropriate controlunction...
Push th utton to sav th conguration and to procd to stup mnu
pointJ
Not: This menu item will not be let automatically ater 4
minutes, so you have plenty o time to adjust
the mechanical setup.
I the servos are still not reacting properly to aileron and
elevator unctions, check i the servos andreceiver wires are
connected as described above in section 3.3 and chapter 4. Also
check i the channelassignment within receiver menu has been done
correctly (section 5.2) i applicable.Additionally veriy the
settings o your transmitter on any remaining mixer unctions (see
section 3.2).
Status-LeD CH1 CH2 CH3
of normal reverse reverse
purpl normal* normal * reverse *
rd normal reverse normal
lu normal normal normal* Factory Settings
Srvo dirctions
JTaching th cyclic pitch gomtry
J
-
7/28/2019 Microbeast 3.0.2 Eng
51/88
51
At this setup pointJ, you have to tell the MICROBEAST the
available cyclic pitch range.
First dont touch any stick on your transmitter when entering
setup menu point J. Orientate one othe rotor blades so that it is
parallel to the tail boom (Fig. 28). Then attach a pitch gauge to
this rotorblade. The swashplate should be in the neutral position
and the blades should have 0 degrees o pitch,otherwise repeat the
swashplate servo centering at setup menu pointG.
Now move the aileron stick until the rotor blade has an exact 6
degrees o cyclic pitch and then releasethe stick ( Fig. 29). I you
moved the swashplate too ar you can steer the stick to the opposite
directionand reduce the pitch. Also by moving the tail stick to one
direction you can delete the adjustment and
reset the swashplate back to 0 degrees.
The direction you choose is not important, what is important is
that you keep the position steady on 6when you save and leave this
menu step. It is not enough to go to 6 and then move back beore
savingand leaving.
Whn raching 6 dgrs, th Status-LeD should light lu This indicates
that your helicopters
rotor head geometry is perect or the use with a ybarless system.
Otherwise, i the Status-LEDs coloris red or purple or even i the
Status-LED is of, this indicates that your helicopters geometry is
notoptimal or ybarless usage. Correct this by using shorter servo
horns, shorter linkage balls on the innerswashplatering or longer
blade grip link levers.
Push th utton to sav th conguration and to procd to stup mnu
pointK
Not: This menu item will not be let automatically ater 4
minutes, so you have plenty o time to adjust
the mechanical setup.
Always st th cyclic pitch to 6 dgrs! This setup does not afect
the maximum rotation
rate o the helicopter but is only there to show the MICROBEAST
the actual mechanical cyclicgeometry. A wrong adjustment at this
step may be extremely detrimental to the perormance othe
MICROBEAST. The blue color o the Status-LED is secondary and just
or inormation.
1. Orientate the rotor blades parallel to the longitudinal axis
o the helicopter.
-
7/28/2019 Microbeast 3.0.2 Eng
52/88
52
2. Adjust the cyclic pitch to exactly 6 degrees.
Move the aileron stick
until6 dgrs (+ or-)o cyclic pitch is reached
Fig. 28
Fig. 29
K Adjusting th collctiv pitch rang
At set p pointK o adj st the ma im m desired negati e and positi
e collecti e pitch
-
7/28/2019 Microbeast 3.0.2 Eng
53/88
53
At setup pointK you adjust the maximum desired negative and
positive collective pitch.
Move the pitch stick all the way up and stay there. Now you can
increase or decrease the maximum amounto pitch using the tail
stick.
When you adjusted the desired maximum pitch angle, move the
pitch stick all the way down and again in-crease or decrease the
pitch to the minimum desired value using the tail stick.
Dont use any pitch curves in your transmitter whil doing ths
adjustmnts. Later on or the ights,you can adjust your pitch curves
as you like and are used to. Setup menu pointK solely serves to
teachthe MICROBEAST the maximum used pitch range.
Push th utton to sav th conguration and to procd to stup mnu
pointL
At this point, veriy again that the demanded pitch direction on
the transmitter is in the correct
direction or the model. Otherwise use your transmitters servo
reversing unction or the pitch channelto correct this as already
described in sectionI.
L Adjusting th cyclic swashplat limit
At setup menu pointL you adjust the maximum possible tilting o
the swashplate or aileron and elevator The
-
7/28/2019 Microbeast 3.0.2 Eng
54/88
54
At setup menu pointL you adjust the maximum possible tilting o
the swashplate or aileron and elevator. Thedeection will be limited
in a circular path similar to a cyclic ring unction.
For adjustment proceed in the ollowing way:Careully move the
sticks or aileron, elevator and pitch to all maximum end points and
watch out i the swashpla-te, the linkage rods or servos are binding
somewhere or even getting not more driven.
By moving the rudder stick to the let or right, you can increase
or decrease the aileron and elevator throw limiter.Always try to
achieve the maximum possible cyclic throw. The higher the
swashplate deection is set the greaterit will be in ight. This will
achieve the maximum possible rotation rate o the helicopter without
sacricing the
gyro control loop.
I aterwards any modications are done to one o the other setup
menu points which afect servo
adjustments (setup menu pointsG,J andK) the cyclic swashplate
adjustment has to be redone.
Push th utton to sav th conguration and to procd to stup mnu
pointM
Similar to setup pointJ, the color o the Status-LED indicates
whether the adjusted limit allowssucient cyclic throw. In the ideal
case, the swashplate is limited only to the extent where the
Status-LED still lights blue. In particular, or models that are
intended to be used in 3D aerobatics, 10 to 12cyclic throw should
be possible. But even or all the other helicopters, it is
recommended to adjust asmuch throw as possible, because otherwise
the control loop may not work properly. Here, the color othe
Status-LED provides a clue. I you get only purple or even no light
at all, it is essential that youchange the mechanical setting o
your model to increase the available throw.
M Stting th swashplat snsor dirctions
At setup menu pointM you check i thesensors or aileron and
elevator areworking in the correct direction
-
7/28/2019 Microbeast 3.0.2 Eng
55/88
55
At setup menu pointM, you check i the sensors or aileron and
elevator are working in the correct direction.
This can be directly veried in this menu point: I you roll or
tilt the helicopter by hand the swashplate has to steer
against this movement. Please reer to this on the next pages
Fig. 30 and 31.
I this is not correct, you can reverse the sensor directions by
moving the tail stick in one direction. Forconrmation you will see
that the Status-LED changes color. Repeat this step until both
sensors arecorrecting in the correct direction.
There are our possible displays or control to choose rom, one
will be correct:
Push th utton to sav th conguration and to procd to stup mnu
pointN
When tilting the helicopter orward the swashplate has to move
backwards, when tilting the heli-copter to the back, the swashplate
has to compensate orward. Same thing applies to the roll axis,when
you roll the helicopter to the let the swashplate has to steer
right and vice versa. Basically theswashplate has to remain
horizontal while banking the helicopter.
Snsor dirction
Status-LeD elvator Ailron
of reversed reversed
purpl reversed normal
rd normal reversed
lu normal* normal*
* Factory Setting
-
7/28/2019 Microbeast 3.0.2 Eng
56/88
56
Tilt the helicopter orwards
The swashplate
has to move backwards
Fig. 30
Roll the helicopter to one side The swashplate has to steer
to the opposite direction
-
7/28/2019 Microbeast 3.0.2 Eng
57/88
57
to the opposite direction
Fig. 31
-
7/28/2019 Microbeast 3.0.2 Eng
58/88
1. Swashplate points to the let
-
7/28/2019 Microbeast 3.0.2 Eng
59/88
59
p p
2. Rotate the helicopteraround the vertical axis
3. Swashplate must still point let, as beore
Fig. 32
8. DIALS AND TAIL GYRO GAIN
Status-LED
Tail gyro mode
-
7/28/2019 Microbeast 3.0.2 Eng
60/88
60
To adjust th dials plas only us th original plastic beASTX
adjustmnt tool to prvnt damag toth dials!
81 Swashplat: cyclic gain (Dial 1)
Turn dial 1 clockwise to increase the swashplate gain.
The actory setting or the dial is horizontal which corresponds
to 100% swashplate gain. For your rst
ights we suggest not changing this setting. However, when using
very small helicopters (such as 250or 450 size), reduce the
swashplate gain slightly.
In general the higher the gain the harder the helicopter will
stop ater cyclic moves and the helicopterwill eel more stable in
the air. I the gain is too high the helicopter eels spongy and
tends to oscillateespecially on the elevator axis.
I the gain is too low the helicopter does not stop precisely
ater a cyclic movement and eels unstablein ast orward ight.
Tail gyro mode
of, blue ashing, blue = HeadingLock
purple = Normal-Rate mode
Menu LEDs:
The amount o tail gainA=0% toN=100%
(only ater powering up or when adjusting the gain)
Dial 1: cyclic gain
Dial 2: direct cyclic eed orward
Dial 3: tail dynamicFig. 33
82 Swashplat: dirct cyclic d orward (Dial 2)
Turn dial 2 clockwise to increase the swashplates direct cyclic
stick eed orward. This is the part o the stickinput that is going
directly to the servos I correctly adjusted this relieves the
control loop which will work
-
7/28/2019 Microbeast 3.0.2 Eng
61/88
61
input that is going directly to the servos. I correctly
adjusted, this relieves the control loop which will workmore
eciently by only having to make residual corrections. Factory
setting o the dial is horizontal which
provides a good setup in most cases.
Increasing the direct cyclic eed orward will cause more cyclic
stick input going directly to aileron and elevatoron the
swashplate. Decreasing the direct stick eed orward will do the
opposite.
I the direct cyclic eed orward is too high, it will over control
your cyclic input. The control loop needs theneventually to steer
back. Even though you get the impression to have a more direct
control, unwanted sideefects may appear, like pitch backs on cyclic
stops and imprecise ast orward ight.
I the direct cyclic eed orward is too low, the helicopter will
eel soter, slower and less direct. The optimalpoint depends o many
actors like blades, servos, head speed, size and mass o the
helicopter.
At delivery the dial is in the middle which should be a good
starting point or most helicopters.
83 Tail dynamic (Dial 3)
Turn dial 3 clockwise to increase the tail dynamic. Turning dial
3 counter clockwise will decrease the taildynamic. Factory setting
o the dial 3 is horizontal which provides a good setup in most
cases.You haveto make sure the maximum possible tail gyro gain has
already been determined (see section 8.4) beo-re adjusting the tail
dynamic.
Increasing the tail dynamic will lead to harder stopping
behavior and more aggressive response to tail stickinputs. I the
dynamic is too high the tail will bounce back shortly ater a hard
stop and eel spongy
when making ast direction changes. I the dynamic is set too low
the tail eels dull and stopping might betoo sot. Ideally the tail
should stop perectly to the point without making any apping
noises.
The direct cyclic eed orward does not afect the maximum rate o
rotation! I the helicopter turns
too slowly, you should check the settings o the swashplate
limiter in setup menuL, change thecontrol behavior in the parameter
menu at pointB, or increase the servo travels or Dual Rate setupin
your remote control.
84 Tail gyro gain (adjustd y th transmittr)
As with a conventional tail gyro, the tail gain can be adjusted
by one o the transmitters auxiliary channels. Inone direction you
can select the Normal Rate mode and in the other direction
HeadingLock mode
-
7/28/2019 Microbeast 3.0.2 Eng
62/88
62
one direction you can select the Normal-Rate mode and in the
other direction HeadingLock mode.
Th color o th Status-LeD indicats th slctd mod whn th MICRObeAST
is rady or opration
Purple indicates Normal-Rate mode and blue or exceptionally
ashing blue indicates HeadingLock mode.Additionally while adjusting
the gain or shortly ater the rst start up, the current amount o
gain is displayedby one o the menu LEDs or about 10 seconds. So you
always know the actual amount o gain in your helicopteras
percentages will depend o the used transmitter. When the gain
channel is centered, this will correspond to0% gain indicated by
LEDA. In both modes, the maximum adjustable tail gain is 100% and
will correspond toLEDN, but the actual percentage in the
transmitter will depend on its brand and/or type.
For the rst ight we suggest to start with a gain not higher
thenF orG in HeadingLock mode. To nd theoptimal gain, we recommend
starting with a low gain, where the tail will eel very weak and
will stop withovershoots. Then increase the gain step by step and
you will eel the tail having more and more precise stops,and hold
better and better on jerky pitch inputs. I the gain gets too high,
the stops will bounce back quicklyand wagging will appear in ast
orward or backward ight.
Operation without using a sensitivity (gain) channel is not
possible!
100% 100%
0%
A
Menu LED:
Tail gyro gain
Normal-Rate-Mode(Status-LED: purple)
HeadingLock-Mode(Satus LED: blue)
Fig. 34
NMLKJIHGFEDCB BC
DEFGH
IJKL
MN
9. pARAMETER MENU
When the MICROBEAST is ready, hold down the button until the
Menu LED next to point A ashesquickly and then release the button
This is how to enter the paramtr mnu
-
7/28/2019 Microbeast 3.0.2 Eng
63/88
63
quickly and then release the button. This is how to enter the
paramtr mnu.
To switch to the next parameter menu point, just briey press the
button once again. Ater the lastmenu point pressing the button one
time more exits the parameter menu and the MICROBEAST isready or
ight again. Status-LED will indicate the tail gyro mode and the
LEDsA -N are of.
Single menu points can be skipped without perorming any changes.
Thereore dont move any stickwhile you are at the menu point you
want to skip and just press the button shortly once again.
Theparameter menu has only eight points A toH, ater pointH you exit
the parameter menu and the
MICROBEAST returns to ight mode.
Nvr attmpt to y whn th MICRObeAST is in on o th mnus!In this
condition the control system and sometimes the stick inputs are
deactivated!
A Swashplat cyclic cntr adjustmnt
The rst menu point in the parameters menu gives you the
possibility to easily adjust your servocenters on the ying eld as
or instance your helicopter is wobbling during pirouettes or when
it
-
7/28/2019 Microbeast 3.0.2 Eng
64/88
64
centers on the ying eld as or instance your helicopter is
wobbling during pirouettes or when itdoesnt climb out straight on
quick pitch inputs.
Nvr us th trim unctions o your rmot control!The MICROBEAST will
see trim as a control command and not as servo trim.
Contrary to centering every single servo in the setup menu
pointG, here you are able to directly adjustaileron and elevator
without taking care about the single servos. However, the
collective pitch cannotbe adjusted here.
Similar to the digital trim unction o most transmitters here at
parameter menu point A you canadjust the swashplate one click by
shortly moving the aileron or elevator stick in the desired
direction.I you want to trim the swashplate any urther repeat
tapping the stick several times or simply hold the
control stick pushed or a longer time to automatically perorm
several trim steps.
During the sub trim procedure you can delete the just perormed
trimming by moving the tail stick inany direction. Additionally the
color o the Status-LED gives you an approximate indication o
howmuch you did trim.
But remember that this unction as opposed to the digital trim o
the transmitter is not
a separate trim unction. Here you directly adjust the servo
centers as well as you would set servocenters in the setup menu
pointG. I the new position is saved once then this corresponds well
to thenew servo center position in the setup menu pointG. A
subsequent reset to the previous state is notpossible anymore!
Push th utton to sav th conguration and to procd to paramtr mnu
pointB
-
7/28/2019 Microbeast 3.0.2 Eng
65/88
Whn using th prdnd control haviors w do not rcommnd to
additionally adjust con-trol curvs (expo/Dual rats) in your
transmittr as this will mix indnal th prst curvs o thMicroast with
th curvs o th transmittr But i you only make little changes (e.g.
slightlyincreasing the servo throw to increase rotation rate) this
should be no problem.
-
7/28/2019 Microbeast 3.0.2 Eng
66/88
66
Additionally when using the setting transmitter by increasing
the tail stick throw, in HeadingLockmode you get to an additional
eature where the tail rotation rate is not limited by the gyro
anymore.With this eature, extremely high tail rotation rates are
possible. The state o the Status-LED shows i thishigh rate mode is
reached. I the LED starts to ash at ull tail stick input, you are
on the controlledrotation rate limit. I you increase the tail stick
servo travel urther, the Status-LED will end up turningof when at
ull stick input. From this point on the rotation rate is no longer
limited by the maximumgyro sensor capability, and you get into a
ree spinning area that can not be controlled by the gyro
anymore. By urther increasing the stick input (dual rates, or
servo end points), the maximum rotationrate will increase even
urther, as ar as the mechanics o the helicopter will allow it!
The option user dened allows you to dene your own setting with
the PC sotware.
Push th utton to sav th conguration and to procd to paramtr mnu
pointC
This atur should only usd riy or spcial Show-manuvrs, or instanc
y tmporarilyswitching th dual rat to highr stick throw Not thr is
no tail gyro control in thisunrgulatd rang and it is vry diicult to
proprly control th tail in this stat!
Thror, mak sur that in normal ight opration th Status-LeD at ull
ruddr stick dosnot turn of I it dos, plas rduc th srvo throw or
dual rat or th tail channl in yourrmot control
C Swashplat pitching up compnsation
While in ast orward ight apply jerky collective pitch inputs to
test this unction. The helicoptershould mainly remain in its
horizontal path during climbing and descending. I the nose o
the
-
7/28/2019 Microbeast 3.0.2 Eng
67/88
67
* Factory Setting
y p g g ghelicopter is pitching up and down heavily like a
swimming dolphin, increase the value at parameter
menu pointC to compensate or this efect. But, i the value is too
high the helicopter might eel sluggishand lazy. Try to nd the
lowest suitable setting.
I the helicopter is still pitching up at the highest value, try
alternatively to increase the swashplate gain(Dial 1) and use aster
and stronger servos as well as rotor blades as neutral as possible
(or exampleblades specically designed or ybarless helis).
The currently selected value is indicated by the Status-LED
color and state:
Status-LeD Pitching up havior
purpl very low
rd fashing lowrd medium *
lu fashing high
lu very high
of usr dnd
Move the tail stick into one direction until the Status-LED
lights in the desired color.The option usr dnd allows you to dene
your own setting with the PC sotware.
Push th utton to sav th conguration and to procd to paramtr mnu
pointD
DTail HadingLock gain
At parameter menu pointD the HeadingLock gain or the tail can be
adjusted:
-
7/28/2019 Microbeast 3.0.2 Eng
68/88
68
The HeadingLock gain determines how constant the tail will
maintain the rotation rate predetermined
by the stick (this includes a rotation rate o height 0 = stick
center position). Start with the HeadingLockgain set to low or very
low and nd out the highest possible tail gain in your transmitter.
Then you canstart to increase the HeadingLock gain:
IftheHeadingLockgainistoolow,pirouetteswillbeinconsistentduringfastforwardightorin
crosswind conditions.
IstheHeadingLockgaintoohigh,itcanhappenthatfasttail-directionchangesnolongercanbecontrolled
clean. It is also possible that the tail will commute gently while
hovering or ying around(which also oten can be a sign o a stif tail
mechanics!) and bounce back when stopping the rotation.
Was the appropriate setting determined it is usually necessary
to adjust the tail gyro gain in thetransmitter again.
Move the tail stick into one direction until the Status-LED
lights in the desired color:
Status-LeD Tail HadingLock gain
purpl very low
rd fashing low
rd medium *
lu fashing high
lu very high
of usr dnd* Factory Setting
I the tail pirouettes and stops unevenly in both directions, it
is recommended to set the tail gyro toNormal-Rate mode in order to
test, whether the tail will drit in a particular direction during
hover. I itdoes, adjust the tail link rod length accordingly, so
that the tail blades have the required compensation
-
7/28/2019 Microbeast 3.0.2 Eng
69/88
69
pitch. Do not orget, to redo the tail rotor limits (setup menu
pointE).
I you did choose in the parameter menu the control behavior
transmitter please make sure that youare not accidently entering
the ree spinning range which might be a reason or inconsistent
rotationrates. See note in parameter menuB (control behavior).
The option usr dnd allows you to dene your own setting with the
PC sotware.
Push th utton to sav th conguration and to procd to paramtr mnu
pointE
E Stick dadand
At parameter menu pointE you can adjust the stick dead band or
elevator, aileron and rudder. Thedeadband is the range around the
very center o the stick where the MICROBEAST will not react.
Unor-tunately, some on the market available transmitters have the
problem that when the sticks are brought
-
7/28/2019 Microbeast 3.0.2 Eng
70/88
70
back, ater an input, to the middle position, they arent exactly
at the same center position as beore.
This generates a continuous deviation on the corresponding
unction, although the stick seems to bein the middle. This
deviation is interpreted as a