Embed Size (px)
DESCRIPTION
Brief description of classical magnetohydrodynamical regime together with some insight on basic geometrical properties of constantly curved three - dimensional space.
Citation preview

Apendix

Index
A Introduccio a la Magnetohidrodinamica Classica 2A.1 Electromagnetisme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
A.1.1 Les equacions de Maxwell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2A.1.2 L’equacio d’ones electromagnetiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
A.2 Introduint el terme de viscositat al regim hidrodinamic . . . . . . . . . . . . . . . . . . . . . . . . . . . 8A.3 Les equacions de la magnetohidrodinamica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
A.3.1 Introduint l’electromagnetisme a la hidrodinamica . . . . . . . . . . . . . . . . . . . . . . . . . 10A.3.2 L’equacio d’induccio magnetica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
B Desenvolupament matematic de metriques d’espais de curvatura no nul·la 12B.1 Metrica de la superfıcie d’una esfera a partir de
la metrica de R3 en coordenades esferiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12B.2 Metrica d’un espai de tres dimensions
amb curvatura no nul·la constant . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13B.2.1 Metrica de Friedmann-Lemaıtre-Robertson-Walker . . . . . . . . . . . . . . . . . . . . . . . . . 14
C El programa astro.cpp 15
1

Apendix A
Introduccio a la MagnetohidrodinamicaClassica
A.1 Electromagnetisme
A.1.1 Les equacions de Maxwell
Llei de Gauss per camps electrics ∇ ·E = ρ/ε0
La llei de Gauss per a camps electrics esta relacionada amb el comportament de camps electrostatics, camps que esmantenen constants al llarg del temps, en totes les posicions de l’espai. Aixı, l’equacio que es mostra al tıtol d’aquestaseccio ens dona informacio sobre el comportament espacial del camp electric donada la distribucio de carregues queel produeix. Per entendre pero l’equacio esmentada, cal primerament plantejar la questio que descriu en la seva formaintegral, la qual cosa ajudara entendre de manera molt mes intuitiva i directa el que s’encarrega de definir. Abans perode presentar l’equacio d’acord amb aquestes darreres consideracions, es precıs donar una idea intuitiva del que realmentsignifica:
Llei de Gauss per camps electrics. Un conjunt de partıcules carregades electricament produeix un camp electric, elflux del qual a traves de qualsevol superfıcie tancada que les contingui es proporcional a la quantitat total de carrega delconjunt.
Alhora de traduir matematicament aquesta explicacio es molt important tenir en compte els tres factors seguents: 1) elflux de camp electric a traves d’una superfıcie, 2) la quantitat de carrega de la regio de l’espai que s’esta evaluant i 3)el factor de proporcionalitat que ens permetra relacionar 1) amb 2). La carrega electrica es una propietat de la materiacaracteritzada per un nombre, un escalar, que ens permet quantitzar-la com a negativa o positiva. Aixı, podem definir laquantitat total de carrega d’un conjunt de partıcules com la suma de les carregues de cadascuna d’aquestes, q = ∑
ni qi. Per
altra banda, fixem-nos que el factor de proporcionalitat que estem buscant ha de representar una mesura de la capacitatdel camp electric E per propagar-se a traves del medi on es genera. Considerem primerament, i per a mes simplicitat queE es propaga a traves del buit. D’acord amb aixo, la constant de proporcionalitat que s’estableix entre flux i carrega repel nom de permitivitat en el buit i es representa amb el sımbol ε0. Fetes aquestes consideracions, la llei de Gauss per acamps electric en la seva forma integral es pot expressar com segueix:‹
SE · nda =
qε0
(A.1)
Fent servir ara el Teorema de Gauss podrem trobar la forma diferencial de l’equacio presentada. Per fer-ho, primer hemde definir la densitat de carrega, ρ . Aquesta, representara la quantitat de carrega per unitat de volum, fet que ens permetestablir la relacio dq/dV = ρ . Tenint en compte aixo, podem transformar cadascun dels membres de l’equacio (A.1) enintegrals de volum, fent servir per una banda el Teorema de Gauss, i per altra, la definicio de densitat de carrega:‹
SE · nda→
˚V(∇ ·E)dV
qε0→˚
V
ρ
ε0dV (A.2)
2

Amb aixo, i fixant-nos de nou en l’equacio (A.1), les integrals de volum es cancel·len i obtenim la llei de Gauss per acamps electrics en la seva forma diferencial:
∇ ·E =ρ
ε0(A.3)
Aquesta darrera expressio ens dona informacio sobre la divergencia del camp donada la distribucio de la densitat decarrega que el genera. Aixı, per a carregues positives, la divergencia sera positiva i el camp tindra el sentit d’allunyar-se de la distribucio. Per a carregues negatives passara just el contrari, la divergencia sera negativa i per tant, el campconvergira cap a la distribucio. Es interessant notar que la divergencia es nul·la nomes quan s’avalua el camp al punt quedesigna la posicio d’una carrega puntual.
Llei de Gauss per camps magnetics ∇ ·B = 0
Possiblement, la diferencia mes important entre el camp magnetic i l’electric es que el segon disposa d’un mecanisme moltclar de generacio. Els camps electrics son creats per carregues positives i/o negatives, les quals podem diferenciar ambnotable facilitat. En canvi, quan parlem de camps magnetics no podem referir-nos a carregues magnetiques, pel fet que nohi ha partıcules puntuals que els generin. Hem de referir-nos doncs, a dipols magnetics, els quals sı podem entendre comel resultat de l’accio conjunta de dues carregues o pols magnetics oposats, que necessariament existeixen emparellats. Laforma integral de la llei de Gauss per camps magnetics ens indica que el flux total de B a traves de qualsevol superfıcietancada es sempre zero. Matematicament tenim:
‹S
B · nda = 0 (A.4)
Aplicant el mateix procediment que en la llei de Gauss per a camps electrics trobem que‚
S B · nda =˝
V (∇ ·B)dV , fetque ens condueixen a la seguent expressio (forma diferencial de la llei de Gauss per camps magnetics):
∇ ·B = 0 (A.5)
Cal recalcar que aquesta equacio es molt important alhora de definir el comportament de camps magnetics. Fixem-nosdoncs que les dimensions i la forma de la superfıcie escollida per evaluar el flux son indiferents, aquest sempre es mantenul. Els camps magnetics son sempre generats per dipols, aquests estan formats per dos pols oposats, dues carreguesmagnetiques que, de la mateixa manera que les electriques, provoquen la divergencia i la convergencia del mateix camp.Es per aquesta rao que el flux magnetic d’entrada a qualsevol superfıcie tancada queda exactament compensat pel fluxmagnetic de sortida. La forma diferencial de la llei de Gauss per camps magnetics ens indica que B mai divergeix niconvergeix a cap punt de l’espai. L’explicacio, per analogia amb el camp electric seria la seguent: com que tot pol nordmagnetic va associat amb un corresponent pol sud ,gracies al qual es defineix el dipol que genera el camp, la carregamagnetica total, i per tant la densitat magnetica a cada punt esdeve zero, de manera que B no tendeix a divergir niconvergir a cap punt.
Llei de Faraday ∇×E =−∂tB
L’any 1831, Michael Faraday i Joseph Henri van descobrir la induccio electromagnetica. Aixı, la induccio electro-magnetica es el nom que rep el proces pel qual un camp magnetic variable amb el temps genera un corrent electriccirculant. Aquest descobriment va corroborar la relacio de reciprocitat existent entre electricitat i magnetisme. Actual-ment constitueix el principi en el que es basen moltes de les tecnologies modernes per funcionar, com son els transforma-dors, els inductors o els generadors. Explıcitament, la llei de Faraday ens diu que la forca electromotriu (el treball fet perunitat de carrega, una mesura del potencial electric) en un circuit tancat equival a la derivada canviada de signe del flux decamp magnetic respecte el temps a traves de la superfıcie delimitada pel circuit. Sigui com sigui, la idea principal darrerad’aquesta llei es pot entendre millor partint de la seguent explicacio:
Llei de Faraday. La variacio del flux de camp magnetic a traves d’una superfıcie qualsevol indueix un corrent electriccirculant al llarg del la lınia que la delimita, fet que genera una forca electromotriu entre qualssevol dos punts d’aquestamateixa lınia.
Cal notar que hi ha diferencies importants entre camps electrostatics i camps electrics induıts. En el primer cas, els campsson generats per una distribucio de carregues, de manera que la seva divergencia es no nul·la, i les lınies de camp no
3

necessariament es tanquen. En el segon, l’origen del camp no es cap carrega, sino un camp magnetic que varia amb eltemps, de manera que les lınies de camp que el defineixen descriuen trajectories tancades, provocant que la divergenciad’aquest sigui zero. De la mateixa manera que els camps electrostatics poden accelerar carregues, els camps electricsinduıts per camps magnetics son capacos d’exercir un treball fruit del voltatge o forca electromotriu que els caracteritza.Aquesta forca electromotriu es defineix doncs, com el treball per unitat de carrega exercit per E al llarg de les trajectoriestancades que hem comentat anteriorment. Aixı, aquest treball pot esser definit matematicament com la integral de lınia deE al llarg d’un camı tancat ∂S, que delimita una superfıcie S, sobre la qual podrem evaluar el canvi en el temps del fluxmagnetic, es a dir, del flux de B a traves de S. La llei de Faraday representa un equilibri entre aquestes dues quantitats:
˛∂S
E ·d`=− ddt
¨S
B · nda (A.6)
Aquesta expressio ens diu que cada vegada que es produeix un canvi en el camp magnetic d’una regio de l’espai, s’indueixun corrent electric circulant (caracteritzat per una forca electromotriu) al llarg de qualsevol corba ∂S que tanqui unasuperfıcie S on B estigui definit. Aquest camp electric induıt intentara sempre preservar el camp magnetic de la situacioinicial B0, creant un altre camp magnetic que s’oposi al canvi de B. De fet, el signe de la integral −dt
‚S B · nda indica
precisament el sentit de circulacio del corrent electric, que sera l’adequat per a satisfer l’equilibri descrit (llei de Lenz).Per obtenir la forma diferencial de la llei de Faraday ens hem de servir del resultat del Teorema d’Stokes, fet que enspermetra disposar de dues integrals de superfıcie a banda i banda de l’igual. Aixı, aplicant el teorema esmentat i tenint encompte que per a geometries estacionaries, la derivada respecte el temps pot passar a l’integrand com a derivada parcial,obtenim, respectivament:
˛∂S
E ·d`→¨
S(∇×E) · nda
ddt
¨∂S
B · nda→¨
∂S(∂tB) · nda (A.7)
Amb aquestes darreres consideracions, obtenim la llei de Faraday en la seva forma diferencial:
∇×E =−∂tB (A.8)
Aquesta ultima equacio ens diu que camps magnetics canviants indueixen camps electrics circulants, es a dir, campselectrics amb rotacional no nul, camps electrics que tendeixen a rotar al voltant de determinats punts de l’espai. Aquesta esprecisament la diferencia principal entre camps electrostatics i camps electrics induıts. Els camps electrostatics disposende rotacional nul, divergeixen de carregues positives, i convergeixen en carregues negatives pero no poden circular endireccio contraria. Els camps electrics induıts no tenen origen, circulen contınuament sobre ells mateixos. La formadiferencial de la llei de Faraday ens permet veure que, com mes rapid canvia B en el temps, E tendeix mes a rotar/circular.
Llei de d’Ampere – Maxwell ∇×B = µ0 (J+ ε0∂tE)
L’any 1820 el fısic frances Andre-Marie Ampere va desenvolupar una teoria capac de quantificar la relacio entre correntselectrics estacionaris i camps magnetics circulants. No molt mes tard, l’any 1850, James Clerk Maxwell va comencardesenvolupant una solida teoria per explicar l’electromagnetisme en la seva totalitat. La llei que Ampere havia estat cons-truint pero, s’aplicava unicament a situacions estatiques, on nomes corrents electrics estacionaris s’hi veien involucrats.Maxwell va ser capac d’introduir un nou terme en l’equacio que va extendre la seva aplicacio a situacions dependents deltemps. La idea principal darrera la llei que ens proposem exposar es presenta resumida a continuacio:
Llei d’Ampere – Maxwell. Els camps electrics que varien amb el temps i els corrents electrics son capacos d’induircamps magnetics circulants al llarg de les lınies que delimiten les superfıcies que els engloben.
La llei d’Ampere – Maxwell ens indica que un corrent electric es capac de generar un camp magnetic circulant al llarg dequalsevol lınia que delimiti una superfıcie travessada per aquest mateix corrent. A mes, la circulacio del camp magneticinduıt sera proporcional a la intensitat del corrent que el genera, i la superfıcie que l’engloba disposara al mateix tempsd’un camp electric de flux variant. Sigui com sigui, en primera instancia, presentarem la llei d’Ampere, valida per asituacions estatiques, on els fluxes electrics es mantenen constants en el temps. Amb aixo, tenim que la seva formaintegral es: ˛
∂SB ·d`= µ0I (A.9)
4

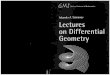
On µ0 es la permeabilitat de l’espai lliure (constant que estableix la relacio de proporcionalitat entre la circulacio de B ila intensitat I del corrent que el genera, referida a la capacitat del buit per transmetre/propagar el camp magnetic). ∂S fareferencia a la lınia que delimita la superfıcie S travessada per la intensitat del corrent electric I, definida al seu torn comel ritme al qual la carrega electrica travessa S (matematicament: dQ/dt).Com hem comentat abans, Maxwell va afegir un altre terme per completar la llei d’Ampere. Aquest va esser caracteritzatcom un flux canviant de camp electric a traves de l’esmentada superfıcie S. Per demostrar l’existencia del terme en questioplantejarem un experiment classic en el que es va observar la inconsistencia de la llei d’Ampere. Considerem doncs elcircuit de la Figura A.1.
Figura A.1: Representacio esquematica d’un circuit electric que pot servir d’experiment per demostrar l’existencia delterme dinamic afegit per Maxwell a la llei d’Ampere. Considerem la trajectoria d’integracio ∂S el perfil circular pertanyenta les respectives superfıcies que engloba el corrent I en els dos casos. A la figura (a) hi ha representada la superfıcie S1, ala (b) la superfıcie S2.
En principi, la trajectoria d’integracio ∂S, on mesurem la intensitat de B es independent de la superfıcie que tanqui I.Sigui com sigui, al nostre circuit, si mesurem B fent servir una superfıcie plana S1 intensitat de camp que obtindrem seradiferent que si ho fem fent servir un altre tipus de superfıcie S2 (cobrint el plat esquerre del condensador). El plat esquerres’estara carregant, pero no hi haura cap corrent electric passant a traves de S2 i en consequencia, no es generara cap campmagnetic. Pero en el cas de S1, per la llei d’Ampere afirmarıem que s’ha creat un B circulant al llarg de ∂S. Aixı doncs,quina pot ser la font real generadora d’aquest camp magnetic? La resposta, un camp electric canviant, generador al seutorn d’una variacio de flux electric a S2 que indueix i justifica el camp magnetic observat. Partint d’aquestes premisesserem capacos de derivar el terme dinamic que Maxwell va incorporar a l’equacio d’Ampere. El camp electric E entredos conductors carregats es (σ/ε0)n, on σ es la densitat superficial de carrega σ ≡ Q/a. Per la llei de Gauss per campselectrics obtenim: ¨
SE · nda =
¨S
σ
ε0n · nda =
¨S
Qaε0
da =Q
aε0
¨S
da =Qε0
(A.10)
En consequencia, el ritme al qual el flux electric varia amb el temps es:
dΦe
dt=
ddt
(Qε0
)=
1ε0
dQdt
(A.11)
Multiplicant aquesta darrera expressio per ε0 obtenim una quantitat anomenada corrent de desplacament, el qual s’had’afegir a la l’equacio (A.9). Fent-ho, la intensitat de corrent total passa a ser I = Ie + Id (corrent electric cobert per lasuperfıcie mes corrent electric de desplacament). Combinant aquestes noves expressions amb la llei d’Ampere obtenimla llei (completa) d’Ampere – Maxwell en la seva forma integral:
˛∂S
B ·d`= µ0
(Ie + ε0
ddt
¨S
E · nda)
(A.12)
5

Per trobar la forma diferencial d’aquesta darrera expressio necessitarem definir una nova quantitat, la densitat de correntelectric J. El corrent electric descriu la quantitat total de carrega que passa a traves d’una determinada superfıcie perunitat de temps. No obstant, aquest tambe pot esser definit com el flux de certa quantitat a traves d’aquesta mateixasuperfıcie. La densitat de corrent J representa precisament aquesta quantitat, i es defineix com la carrega que passa perunitat de superfıcie perpendicular al flux de corrent electric, cada segon (per unitat de temps). Aixı, la relacio entre Ie i Jsera doncs: Ie =
˜S J · nda. Per altra banda, la circulacio del camp magnetic tambe pot esser transcrita matematicament
com una integral de superfıcie gracies al Teorema d’Stokes:¸
∂S B ·d`=˜
S(∇×B) · nda. Finalment, i per poder obtenirla forma diferencial de la llei d’Ampere – Maxwell, hem d’incloure la derivada respecte el temps del flux electric dins laintegral que el defineix. Aixo ho podem fer, doncs la superfıcie al llarg de l’equal aquest s’evalua es fixada, no variable,i per tant dona lloc a geometries estacionaries: d(
˜S E · nda)/dt =
˜S(∂tE) · nda. Combinant aquestes tres ultimes
modificacions podem obtenir la seguent expressio:¨
S(∇×B) · nda = µ0
(¨S
J · nda+ ε0
¨S(∂tE) · nda
)(A.13)
Essent totes tres integrals evaluades sobre la mateixa superfıcie S, aquesta ultima igualtat queda simplificada de la seguentmanera, donant lloc a la llei d’Ampere – Maxwell en la seva forma diferencial:
∇×B = µ0 (J+ ε0∂tE) (A.14)
A.1.2 L’equacio d’ones electromagnetiques
La cohesio matematica de les lleis de Maxwell va possibilitar que aquest fos capac de deduir que tan el camp electriccom el magnetic es propagaven en un mateix medi en forma d’ones amb la mateixa velocitat de propagacio. Fou preci-sament aquest descobriment el que va permetre corroborar la naturalesa ondulatoria de la llum, aixı com establir la sevadirecta relacio amb l’electromagnetisme. Al llarg d’aquest breu capıtol, l’objectiu es demostrar amb la maxima rigorositatmatematica possible l’origen d’aquesta equacio.
Equacio d’ona del camp electric. Desenvolupament matematic.
En la seva forma diferencial, les equacions de Maxwell son les seguents:
∇ ·E = ρ/ε0 (A.15)
∇ ·B = 0 (A.16)
∇×E =−∂tB (A.17)
∇×B = µ0 (J+ ε0∂tE) (A.18)
Servint-nos d’aquesta descripcio matematica del camp electric i el camp magnetic, podrem trobar una equacio d’ona pera cadascun d’ells. Abans pero, es convenient introduir l’equacio d’ona generalitzada (en tres dimensions), determinada apartir de la seguent expressio1:
∇2A =
3
∑i=1
ei
3
∑j=1
∂x jx j Axi =1v2
∂ 2A∂ t2 =
1v2 ∂ttA (A.19)
On A(x1,x2,x3, t) es una funcio que descriu l’ona, que depen de l’espai (x1,x2,x3) i del temps t, i on v es la velocitat depropagacio de l’ona en questio. D’acord amb aquesta breu introduccio, l’objectiu que tenim ara es trobar una expressio,similar a (A.19), on en comptes de A hi trobem involucrats els camps electric E i magnetic B.
1L’equacio d’ona es una equacio diferencial parcial homogenia lineal de segon ordre. Parcial perque fa us de derivades parcials que ames, actuen sobre dues variables diferents, en aquest cas l’espai i el temps. Homogenia perque tots els termes operen sobre la funcio d’o-na A, la funcio que es vol aıllar. Lineal perque per definicio, una equacio diferencial parcial lineal de A(x1,x2, ...,xn,) es de la formaf (x1, ...,xn,A,∂x1 A, ...,∂x2 A,∂x1x1 A, ...,∂x1xn A, ...) = 0, on f es una funcio lineal de A i les seves derivades parcials. I de segon ordre, perque laderivada d’ordre mes gran de l’equacio es d’ordre dos (∂ 2).
6

Per fer-ho, prenem inicialment el rotacional a ambdues bandes de la llei de Faraday en la seva forma diferencial:
∇× (∇×E) = ∇× [(∂yEz−∂zEx) i+(∂zEx−∂xEz) j+(∂xEy−∂yEx)k] =
= [∂y (∂xEy−∂yEx)−∂z (∂zEx−∂xEz)] i+
+ [∂z (∂yEz−∂zEx)−∂x (∂xEy−∂yEx)] j+
+ [∂x (∂zEx−∂xEz)−∂y (∂yEz−∂zEx)]k =
= [∂x∂yEy +∂x∂zEz−∂yyEx−∂zzEx +(∂x∂xEx−∂xxEx)] i+
+ [∂y∂xEx +∂y∂zEz−∂xxEy−∂zzEy +(∂y∂yEy−∂yyEy)] j+
+ [∂z∂xEx +∂z∂yEy−∂xxEz−∂yyEz +(∂z∂zEz−∂zzEz)]k =
=(∂xΣ
3i=1∂xiExi −∇
2Ex)
i+(∂yΣ
3i=1∂xiExi −∇
2Ey)
j+(∂zΣ
3i=1∂xiExi −∇
2Ez)
k =
=3
∑i=1
ei∂xi (∇ ·E)−3
∑i=1
ei∇2Ei =
= ∇(∇ ·E)−∇2E = ∇× (−∂tB) =−∂t(∇×B) (A.20)
On hem utilitzat les definicions –previament donades– de divergencia ∇ ·A ≡ Σ3i=1∂xiAxi , gradient ∇φ ≡ Σ3
i=1ei∂xiφ ilaplacia ∇2ϕ ≡ Σ3
i=1ei∂xixiϕ; i ens hem servit del fet que, en cada coordenada xi, sumar i restar el terme ∂xixiExi permetiasimplificar i acabar expressant ∇×(∇×E) com ∇(∇ ·E)−∇2E. L’aplicacio del laplacia al camp electric es realitza igualque la que s’ha mostrat en el desenvolupament de l’equacio generalitzada d’ona: ∇2E = Σ3
i=1eiΣ3j=1∂x jx j Exi .
Aixı, tenint en compte que la llei de Gauss per camps electrics –equacio (A.15)– ∇ ·E = ρ/ε0, i la llei d’Ampere –Maxwell –equacio (A.18)–, trobem:
∇
(ρ
ε0
)−∇
2E =−µ0∂tJ−µ0ε0∂ttE (A.21)
Si ara tenim en compte que el medi a traves del qual es propaga el camp electric es el buit, tenim que la densitat decarrega es nul·la ρ = 0, aixı com tambe la densitat de corrent electric J = 0. Incloent aquestes darreres consideracions al’expressio anterior, i reordenant els seus termes trobem l’equacio d’ona del camp electric:
∇2E = µ0ε0∂ttE (A.22)
Aixı doncs, per l’expressio mostrada abans de l’equacio generalitzada d’una ona en tres dimensions, veiem que la velocitatde propagacio del camp electric a traves del buit es:
1v2 = µ0ε0⇒ v =
1√
µ0ε0≡ c0 (A.23)
L’estudi experimental de la permitivitat electrica ε0 i la permeabilitat magnetica µ0 en el buit va permetre comprovar que,efectivament, el valor de 1/
√µ0ε0 (velocitat de propagacio del camp electric) era el de la velocitat de la llum c0 (tambe
referida al buit). No obstant, a nivell teoric s’ha pogut arribar al mateix resultant.
Equacio d’ona del camp magnetic
Realitzant un procediment similar en la seccio anterior, es facil arribar a l’equacio d’ona del camp magnetic. Comencemprimerament per prendre el rotacional a ambdues bandes de la llei d’Ampere – Maxwell. Gracies a la identitat a la quehem arribat abans (desenvolupant matematicament), sabem que el rotacional del rotacional d’un camp vectorial equival algradient de la seva divergencia menys el laplacia aplicat a cadascuna de les seves components: ∇× (∇×A) = ∇(∇ ·A)−∇2A. Tenint en compte aixo:
∇× (∇×B) = ∇(∇ ·B)−∇2B = ∇× [µ0 (J+ ε0∂tE)] = (A.24)
= ∇× (µ0J)+∇× [∂t(µ0ε0E)] = µ0(∇×J)+µ0ε0∂t (∇×E) (A.25)
Tenint en compte les mateixes consideracions que han permes obtenir l’equacio d’ona del camp electric en la seccioanterior (ρ = 0 i J = 0), aixı com tambe la llei de Gauss per a camps magnetics –equacio (A.16)– i la llei de Faraday–equacio (A.17)– l’expressio anterior queda:
∇(∇ ·B)−∇2B =−∇
2B = µ0ε0∂t(−∂tB) =−µ0ε0∂ttB (A.26)
7

Obtenim aixı finalment, l’equacio d’ona del camp magnetic:
∇2B = µ0ε0∂ttB (A.27)
Veiem doncs que la velocitat de propagacio d’aquest sera la mateixa que la del camp electric, fet que exemplifica la relacioexistent entre ambdos i que alhora, justifica amb escreix l’existencia de l’electromagnetisme com a branca pilar de la fısicamoderna.
A.2 Introduint el terme de viscositat al regim hidrodinamic
La viscositat d’un fluid es una mesura de la seva resistencia a deformar-se gradualment quan se li apliquen esforcos detensio. Altrament dit, la viscositat caracteritza la resistencia a fluir del lıquid o gas en questio, donades les condicions sotales quals treballa.Es una propietat que sorgeix per la friccio existent entre partıcules del propi fluid, generada per les diferents velocitatsd’aquestes. Una manera de pensar-hi es prenent l’exemple d’un fluid que es mou per dins d’un cilindre buit. Les partıculesmes properes a les parets del cilindre es mouran mes lentament per estar en contacte amb la superfıcie d’aquestes, mentreque les que es mouen al llarg l’eix del cilindre seran les mes rapides. Aquest fenomen es el mateix que provoca l’apariciod’una tensio mecanica2 (tallant) capac de compensar les forces de friccio entre partıcules i assegurar la continuitat delmoviment del fluid. Aixı, la viscositat es una propietat que depen de la morfologia de les partıcules que constitueixen elfluid, i de la naturalesa de les forces d’atraccio entre aquestes. Tindran doncs viscositat nul·la, aquells fluids en que noapareguin tensions tallants ni forces de friccio entre les seves partıcules (encara que aquest fet s’oposi potser a la propiadefinicio de fluid), fet que nomes es dona en els ja definits fluids ideals. Tot i aixo, la viscositat pot arribar a tenir valorsmolt propers al zero, com passa amb els superfluids. No obstant, aixo requereix treballar a temperatures molt baixes.La viscositat dinamica doncs, expressa la resistencia de lıquids i gasos a fluir. Es basa en el fet que, capes de de fluidadjacents es mouen paral·leles les unes a les altres a velocitats diferents. La viscositat dinamica es pot estudiar a partirde la situacio idealitzada d’un fluid de Couette, on les capes de fluid es troben atrapades entre dos plats horitzontals iparal·lels, un estatic i l’altre movent-se a velocitat constant u. Si aquesta velocitat es prou petita, les partıcules properesal plat que es mou es desplacaran paral·leles a aquest i amb la mateixa velocitat. Aixı, la velocitat de les partıcules adiferents altures del fluid y variaran linealment de zero (essent aquestes les que toquen al plat estatic) a u (les que esmouen solidaries al plat que es desplaca). Les diferents velocitats que tindran les partıcules a les diferents capes del fluiddonaran lloc a una forca de friccio Ff que s’oposara al seu moviment relatiu. Experimentalment es pot comprovar que elplat que es mou rebra una forca per part de les partıcules del fluid que s’oposara al seu moviment, mentre que l’estatic enrebra una d’igual magnitud i direccio, pero sentit contrari. Per a mantenir constant la velocitat u a la que es movia el platsuperior sera necessaria doncs una forca F . Aquesta forca generara una tensio mecanica sobre el plat en moviment: F/A,on A representa la superfıcie del plat (que suposem prou gran com per negligir els efectes del seu moviment als punts onlimita amb el fluid). Per altra banda, hem de tenir en compte que el fluid es deformara. La caracteritzacio matematicad’aquesta deformacio ve donada pel ritme al que es produeix: u/y. Aquesta expressio representa la variacio en el tempsde la deformacio relativa d’una columna de fluid, produıda pels esforcos exercits pel plat que es desplaca. La viscositatdinamica es defineix doncs com el quocient entre la tensio mecanica del plat en moviment i el ritme al que el fluid pateixdeformacions:
viscositat dinamica: µ =F/Au/y⇒ F = µA
uy
(A.28)
Generalitzant el cas anterior, es pot demostrar que la tensio tallant rebuda per una lamina de fluid, situada a una altura y0
es proporcional al gradient de la velocitat al llarg de l’eix Y en aquest punt, aixı com a la viscositat dinamica del fluid µ:
τ = µ∂u∂y
∣∣∣∣y=y0
(A.29)
On τ representa la tensio en questio.
2Tensio mecanica: es una magnitud fısica que expressa les forces internes que les partıcules d’un material continuu s’exerceixen entre elles mateixes.Mes concretament, la tensio mecanica es la forca per unitat de superfıcie que s’exerceix sobre un material de morfologia determinada.
8

De totes maneres, en aquest cas estem considerant lamines de fluid, pero en situacions reals, les parceles de fluid queconstitueixen el sistema que estem treballant reben esforcos de tensio per totes i cadascuna de les seves cares. Si evaluemdoncs l’esforc total al que esta sotmes una d’aquestes cares, hem de tenir en compte les direccions dels dos eixos decoordenades que la contenen (en aquest primer cas, seran l’eix X i el Y . Per fer-ho, sumem les contribucions respectivesde la tensio tallant en cadascuna de les direccions3
τz = µ∂ux
∂y+µ
∂uy
∂x= µ (∂yux +∂xuy) (A.31)
Fixem-nos que la contribucio al llarg de l’eix de les X indica la deformacio de la cara en la direccio de l’eix Y (la variaciode la component y de la velocitat).4 Amb aixo, el terme τz representa la tensio rebuda per les cares amb vector normalparal·lel a l’eix Z (pla XY ) exercida per les components x i y de les forces que la generen. Sabent aixo, les tensions tallantsque obtindrem en cadascuna de les –possibles– direccions seran les seguents (d’acord amb la notacio establerta):
cares paral·leles al pla XY : τz = µ (∂yux +∂xuy) (A.32)
cares paral·leles al pla Y Z: τx = µ (∂zuy +∂yuz) (A.33)
cares paral·leles al pla ZX : τy = µ (∂xuz +∂zux) (A.34)
Les tensions σx, σy i σz son tensions normals (fem servir els mateixos criteris de notacio que hem establert per les tensionstallants o tangents τxi ), que exerceixen forces perpendiculars a cadascuna de les superfıcies de les cares de l’element defluid que estem estudiant. Aixı, tal com hem fet en el desenvolupament anterior, aquestes es defineixen de la seguentmanera
σx = µ (∂xux +∂xux) = 2µ∂xux (A.35)
σy = µ (∂yuy +∂yuy) = 2µ∂yuy (A.36)
σz = µ (∂zuz +∂zuz) = 2µ∂zuz (A.37)
La tensio mecanica total aportada per la viscositat del fluid exercira una forca a la parcel·la que estem estudiant, la qualpodrem posteriorment incloure a l’equacio de conservacio de moment lineal de la hidrodinamica, que es el propositultim d’aquesta seccio. Tenint en compte aixo, analitzarem quina es la component x d’aquesta forca i, posteriorment,per analogia, deduirem les dues restants, y i z. Si l’element diferencial de fluid es troba alineat i paral·lel als eixosde coordenades (fet que constatem per comoditat alhora d’efectuar els calculs i donar les explicacions) els esforcos detensio que tenen repercussio en la component x de la forca que estem buscant seran: τz, τy i σx. Sabent que, per definicio,τ = dF/dA, veiem que Fx = (δτz+δτy+δσx)da (on da representa l’area diferencial de la superfıcie de les cares). Hauremdoncs de tenir en compte la variacio de les tensions esmentades al llarg dels eixos respecte els quals poden variar (tensionsnetes). En el cas, per exemple, de τz, es evident que la variacio respecte l’eix Y comportara una variacio de la componentx de la forca que aquesta tensio es capac de generar. Si avaluessim la derivada parcial al llarg de l’eix X , la variacio de lacomponent x d’aquesta mateixa forca seria nul·la, malgrat varies la seva component y (pel factor ∂xuy). Tenint en compteaixo, i per analogia, trobem el seguent i important resultat:
δτz = (∂zτz)dz (A.38)
δτy = (∂yτy)dy (A.39)
δσx = (∂xσx)dx (A.40)
(A.41)
3La demostracio rigorosa del que en aquest apartat es vol explicar requereix l’utilitzacio i domini de tensors, objectes matematics amb els qualsencara no m’he pogut familiaritzar. El tensor de tensio mecanica –anomenat tambe tensor de Cauchy– pero s’organitza com una matriu de 3×3 on elselements estan distribuits com segueix:
σσσ =
σxx τxy τxz
τyx σyy τyz
τzx τzy σzz
(A.30)
On τi j amb i 6= j representen les tensions tallants (tensio que actua deformant tangencialment en la direccio de l’eix j la cara amb vector normal paral·lela l’eix i de l’element de material que estem estudiant), i on σii representen els esforcos normals aplicats tambe a les respectives cares.
4El calcul de la forca total exercida per la tensio tallant (provocada per la viscositat) que actua en una parcel·la de fluid requereix saber operar ambtensors, fet que queda fora dels proposits d’aquest treball.
9

Amb aixo, Fx esdeve:
Fx = (∂zτz +∂yτy +∂xσx)dxdydz =
= [2µ∂x(∂xux)+µ∂y(∂yux +∂xuy)+µ∂z(∂zux +∂xuz)]dxdydz =
= (2µ∂xxux +µ∂yyux +µ∂yxuy +µ∂zzux +µ∂zxuz)dxdydz =
= µ
(3
∑i=1
∂xixiux +∂x
3
∑i=1
∂xiuxi
)dxdydz =
= µ[∇
2ux +∂x (∇ ·u)]
dxdydz = µ(∇2ux)dxdydz (A.42)
On s’ha considerat que estem treballant amb fluids no compressibles, es a dir, fluids on les variacions de densitat en eltemps son despreciables i on per tant, la divergencia de la velocitat ∇ ·u = 0, per l’equacio de la continuitat. Aquestaexpressio ens permet inferir les components restants de la forca generada per la tensio de viscositat del fluid, aquesta, perunitat de volum dV = dxdydz sera:
Fν = ν
3
∑i=1
ei
3
∑j=1
∂x jx j uxi = ν∇2u (A.43)
Amb aixo, ja podem completar l’equacio de conservacio del moment lineal, que quedara, finalment, com segueix:
∂tu+u ·∇u =−∇pρ−∇Φ+ν∇
2u (A.44)
On ν s’anomena viscositat cinematica i es defineix com µ/ρ , on ∇u equival a ∑3i=1 ei ∑
3j=1 ∂x j uxi i on el calcul del terme
∂tu+u ·∇u s’efectua d’acord amb la seguent expressio:
3
∑i=1
ei
[∂tuxi +
3
∑j=1
ux j (∇u)x j
]. (A.45)
A.3 Les equacions de la magnetohidrodinamica
La magnetohidrodinamica es la branca de la fısica que tracta la mecanica de fluids capacos de conduir electricitat i pertant, sotmesos a forces magnetiques. Te moltes aplicacions, destacant les que en astrofısica, han permes la simulacio icomprensio de sistemes complexos com per exemple els pulsars, les estrelles de neutrons o la dinamica de la convecciode plasma a la superfıcie de les estrelles.
A.3.1 Introduint l’electromagnetisme a la hidrodinamica
Malgrat pugui semblar una tasca difıcil, un cop assolides les nocions conceptuals i matematiques tan de la hidrodinamicacom de l’electromagnetisme, arribar a entendre l’origen de les equacions de la magnetohidrodinamica no resulta del totcomplicat. Per comencar doncs, considerem –com era d’esperar– una parcel·la infinitesimal de fluid de volum dV . Si elfluid condueix electricitat, la parcel·la disposara d’una certa carrega dQ i d’una certa densitat de carrega ρe = dQ/dV . Ames, tenint en compte que a traves del fluid hi circula un corrent electric, sobre aquesta parcel·la tambe hi actuara un campmagnetic B. Amb tot aixo, la forca total que exerciran els camps electric i magnetic sobre l’element diferencial de fluidper unitat de volum sera:
f = f e + f b = ρeE+J×B (A.46)
On s’ha utilitzat que, per definicio, la densitat de corrent electric J = ρev (on v indica la velocitat a la que circula el correntelectric).La llei d’Ohm generalitzada ens indica, per altra banda, que el corrent electric total a traves d’un determinat conductores proporcional al camp electric total sota el qual aquest es troba sotmes. Aixı, podrıem pensar que l’unic camp electricque actua sobre la parcel·la (o el fluid) en questio es l’inicialment pressuposat, pero hem de tenir en compte que aquestaes mou a una velocitat determinada sota la influencia d’un camp magnetic, fet que genera una forca dFb = dQ(u×B) (onu es la velocitat del fluid/parcel·la) que al seu torn es pot interpretar com a electrica i que en consequencia, per definicio,dona lloc a un camp electric secundari E′ = u×B. Amb tot aixo, i servint-nos de la llei d’Ohm generalitzada previamentesmentada trobem que:
J = σET = σ (E+u×B) (A.47)
10

On σ es la constant de proporcionalitat i s’anomena conductivitat electrica (caracterıstica que depen del medi a travesdel qual circula el corrent i que descriu la seva capacitat per deixar-lo fluir). Afegint les forces f b i f e a l’equacio deconservacio del moment lineal i tenint en compte aquestes darreres consideracions pel que fa al valor de J, la magne-tohidrodinamica quedaria definida (fent servir tambe les equacions de Maxwell). Tot i aixo, es convenient fer certessimplificacions que permetran estudiar la situacio d’una manera molt mes senzilla.Aixı, en la majoria de contextos d’aplicacio de la magnetohidrodinamica, le velocitat del fluid que s’estudia es molt mesbaixa que la de la llum. Aquest fet ens permetra fer un seguit d’aproximacions que, sense deixar de ser rigoroses, per-metran arribar a la simplificacio que s’ha comentat. Definim ara una velocitat de fluid tıpica (o mitjana) U , una escala detemps tıpica T , una escala espacial tıpica L, i unes intensitats de camp electric i magnetic E i B respectivament (tambetıpiques/normals). De l’equacio de Faraday deduım el seguent:
∇×E =−∂tB⇒EL≈ B
T→ E
B≈ L
T≡U (A.48)
Analogament, podem determinar la influencia aproximada del corrent de desplacament en l’equacio d’Ampere – Maxwell:∣∣∣∣µ0ε0∂tE∇×B
∣∣∣∣⇒ µ0ε0E/TB/L
=1c2
ELBT≈ U2
c2 → 0 (A.49)
Veiem doncs que el terme µ0ε0∂tE es pot negligir quan calculem rotacional del camp magnetic en sistemes movent-se amolt baixa velocitat (U c). Per aquest motiu, l’aproximacio ∇×B = µ0J sera valida per al fluid estudiat.Calculem ara la influencia que te la forca electrica per unitat de volum en l’equacio de conservacio del moment linealrespecte la magnetica: ∣∣∣∣ ρeE
J×B
∣∣∣∣⇒ (ε0E/L)E(B/Lµ0)B
= µ0ε0E2LB2L≈ U2
c2 → 0 (A.50)
On hem fet servir la llei de Gauss per a camps electrics (ρe = ε0(∇ ·E)) i l’aproximacio deduıda en el pas anteriorJ = (1/µ0)∇×B. Veiem que tambe en aquest cas, la importancia relativa de f e es molt petita en comparacio a la de f b, fetque permet eliminar-la de l’equacio de conservacio de moment lineal. Amb aquestes darreres consideracions, l’equacioesmentada queda com segueix:
∂tu+u ·∇u =−∇pρ−∇Φ+ν∇
2u+1µ0
(∇×B)×B (A.51)
A.3.2 L’equacio d’induccio magnetica
Podem encara pero trobar com varia el camp magnetic en funcio del temps, d’acord amb les caracterıstiques del fluid.Per fer-ho, recordem l’aproximacio que hem efectuat per al rotacional del camp magnetic i la llei d’Ohm generalitzada.L’aparicio de la densitat de corrent electric en les dues expressions ens permet trobar la seguent igualtat:
J≡ 1µ0
∇×B = σ (E+u×B) (A.52)
Que al seu torn permet arribar a la seguent expressio:
η∇×B = E+u×B (A.53)
On η = 1/µ0σ i s’anomena difusivitat magnetica (es una mesura de la tendencia d’un camp magnetic a difondre’s a travesd’un medi conductor). Prenent el rotacional a ambdues bandes de l’igual i desenvolupant:
∇× (η∇×B) = η∇(∇ ·B)−η∇2B =−η∇
2B =
= ∇× (E+u×B) = ∇×E+∇× (u×B) =−∂tB+∇× (u×B) (A.54)
On s’ha fet servir que ∇ ·B = 0 (per la llei de Gauss per camps magnetics) i que ∇×E = −∂tB (per la llei de Faraday).Finalment, aıllant ∂tB:
∂tB = η∇2B+∇× (u×B) . (A.55)
Aquesta ultima expressio rep el nom d’equacio d’induccio magnetica i permet completar la descripcio matematica delregim magnetohidrodinamic classic, descrivint l’evolucio en el temps del camp magnetic B sota el qual es trobara sotmesel fluid. Cal esmentar que, si la velocitat es molt petita, el terme de difusio η∇2B tindra molta importancia, i provocarauna davallada de la intensitat de camp magnetic, la qual nomes podra esser suplantada pel terme ∇× (u×B) (que descriula interaccio de B amb el fluid).
11

Apendix B
Desenvolupament matematic de metriquesd’espais de curvatura no nul·la
Aquest apartat preten mostrar el desenvolupament matematic que permet arribar a les expressions que s’han donat de lesmetriques d’espais de curvatura no nul·la, com serien la metrica de FLRW o la metrica de la superfıcie d’una esfera.
B.1 Metrica de la superfıcie d’una esfera a partir dela metrica de R3 en coordenades esferiques
Per definicio, i considerant l’espai euclidia, la metrica en R3 es:
ds2 = dx2 +dy2 +dz2
En coordenades esferiques pero, aquesta metrica adquirira una forma molt diferent. L’objectiu d’aquesta seccio es mostrartot el desenvolupament matematic necessari per expressar ds2 en funcio de r,θ ,ϕ , variables que defineixen qualsevolposicio en coordenades esferiques, en que, per definicio: x = r sinθ cosϕ , y = r sinθ sinϕ i z = r cosθ . D’acord ambaixo, procedim a trobar les quantitats diferencials dx,dy,dz en funcio de r,θ ,ϕ:
dxdr
=d(r sinθ)
drcosϕ +
dcosϕ
drr sinθ = sinθ cosϕ + r cosθ
dθ
drcosϕ− sinϕ
dϕ
drr sinθ ⇒
⇒ dx =(
dxdr
)dr = sinθ cosϕdr+ r cosθ cosϕdθ − r sinθ sinϕdϕ
dydr
=d(r sinθ)
drsinϕ +
dsinϕ
drr sinθ = sinθ sinϕ + r cosθ
dθ
drsinϕ + cosϕ
dϕ
drr sinθ ⇒
⇒ dy =(
dydr
)dr = sinθ sinϕdr+ r cosθ sinϕdθ + r sinθ cosϕdϕ
dzdr
= cosθ − r sinθdθ
dr⇒ dz =
(dzdr
)dr = cosθdr− r sinθdθ
Tenint en compte aquestes darreres expressions, elevem al quadrat:
dx2 = sin2θ cos2
ϕdr2 + r2 cos2θ cos2
ϕdθ2 +
+ r2 sin2θ sin2
ϕdϕ2 +2sinθ cosθ cos2
ϕdrdθ −
− 2r sin2θ sinϕ cosϕdrdϕ−2r sinθ cosθ sinϕ cosϕdθdϕ
dy2 = sin2θ sin2
ϕdr2 + r2 cos2θ sin2
ϕdθ2 +
+ r2 sin2θ cos2
ϕdϕ2 +2sinθ cosθ sin2
ϕdrdθ +
+ 2r sin2θ sinϕ cosϕdrdϕ +2r sinθ cosθ sinϕ cosϕdθdϕ
dz2 = cos2θdr2 + r2 sin2
θdθ2−2r sinθ cosθdrdθ
12

Finalment, sumant dx2,dy2,dz2 s’obte1:
ds2 = dx2 +dy2 +dz2 = sin2θ(cos2
ϕ + sin2ϕ)dr2 + r2 cos2
θ(cos2ϕ + sin2
ϕ)dθ2 +
+ r2 sin2θ(sin2
ϕ + cos2ϕ)dϕ
2 +2sinθ cosθ(cos2ϕ + sin2
ϕ)drdθ + cos2θdr2 +
+ r2 sin2θdθ
2−2r sinθ cosθdrdθ = dr2(sin2θ + cos2
θ)+ r2dθ2(sin2
θ + cos2θ)+
+ r2 sin2θdϕ
2 = dr2 + r2 (dθ2 + sin2
θdϕ2)
Aixı, imposant a la coordenada radial un valor constant, r = R, obtenim la metrica de la superfıcie d’una esfera de 3dimensions (tenint en compte que, per tant, dr = 0):
ds2e = R2 (dθ
2 + sin2θdϕ
2)Si ara fem el canvi de variable λ = sinθ , observem que:
dλ = cosθdθ =√
1−λ 2dθ ⇒ dθ =dλ√
1−λ 2
Aixo ens permet expressar la metrica (tambe) de la seguent manera:
ds2e = R2
(dλ 2
1−λ 2 +λ2dϕ
2).
B.2 Metrica d’un espai de tres dimensionsamb curvatura no nul·la constant
Comencant com hem fet abans, per definicio, la metrica a R4 es:
ds2 = dx2 +dy2 +dz2 +dw2
On x,y,z,w representen les coordenades d’una posicio de l’espai en questio. En aquest cas, en comptes de deduir lametrica partint de l’expressio de x,y,z,w en coordenades esferiques, ho farem d’acord amb el segon procediment explicata la memoria del treball. Farem servir doncs l’equacio de l’esfera en quatre dimensions, per expressar dw en funcio delsdiferencials dx,dy,dz restants. Aixı, en R4, una esfera (tambe anomenada hiperesfera) es descrita a traves de la seguentexpressio:
x2 + y2 + z2 +w2 = R2
On R representa el seu radi. Aixı, trobem que:
xdx+ ydy+ zdz+wdw = RdR = 0⇒ dw =− xdx+ ydy+ zdzR2− (x2 + y2 + z2)
Atenenent a les explicacions donades, fem el canvi a coordenades esferiques en tres dimensions per a les variables x, y iz. Aixı, com abans: x = r sinθ cosϕ , y = r sinθ sinϕ i z = r cosθ . Amb aixo, desenvolupant, obtenim:
xdx = r sinθ cosϕ(sinθ cosϕdr+ r cosθ cosϕdθ − r sinθ sinϕdϕ) =
= r sin2θ cos2
ϕdr+ r2 sinθ cosθ cos2ϕdθ − r2 sin2
θ sinϕ cosϕdϕ
ydy = r sinθ cosϕ(sinθ sinϕdr+ r cosθ sinϕdθ + r sinθ cosϕdϕ) =
= r sin2θ sin2
ϕdr+ r2 sinθ cosθ sin2ϕdθ + r2 sin2
θ sinϕ cosϕdϕ
zdz = r cosθ(cosθdr− r sinθdθ) = r cos2θdr− r2 sinθ cosθdθ
Sumant, s’obte2:
xdx+ ydy+ zdz = r sin2θdr+ r2 sinθ cosθdθ − r2 sinθ cosθdθ + r cos2
θdr = rdr
1El resultat ultim d’aquest desenvolupament ens porta a l’expressio de la metrica de R3 en coordenades esferiques.2Per analogia, haurıem pogut deduir que xdx+ ydy+ zdz = rdr, ates que sabıem que x2 + y2 + z2 = r2. No obstant, desenvolupar matematicament
permet veure amb mes claredat per que aixo passa, i ens dona una nocio mes nıtida del que s’esta fent.
13

Amb aixo, i en coordenades esferiques (referides a tres dimensions), la metrica de la superfıcie d’una 4-esfera queda:
ds2e4
= dx2 +dy2 +dz2 +dw2 = dr2 + r2 (dθ2 + sin2
θdϕ2)+ r2dr2
R2− r2 =
=R2dr2
R2− r2 + r2 (dθ2 + sin2
θdϕ2)= dr2
1−( r
R
)2 + r2 (dθ2 + sin2
θdϕ2)
En aquest cas, la curvatura de la superfıcie es positiva, κ > 0 i constant. Per a fer-la negativa, simplement hem deconsiderar que el radi de l’esfera que inicialment hem tractat, era imaginari iR ∈ C, fet que ens condueix cap a la seguentexpressio, que ja estat comentada al llarg del treball:
ds2κ =
dr2
1−κ( r
R
)2 + r2 (dθ2 + sin2
θdϕ2)
On per κ = 1 tenim curvatura constant positiva (el cas de la 4-esfera), per κ = −1, curvatura constant negativa i perκ = 0, curvatura nul·la (fet que s’enten millor si es considera un radi de curvatura R→ ∞). Fixem-nos pero que quan lacurvatura es positiva, κ = 1 i r = R, la metrica no queda definida, per l’aparicio del terme dr2/0. Per solucionar aquestasingularitat (que resulta esser fruit unicament del sistema de coordenades escollit), es fa el canvi de variable r = Rsin χ ,fet que transforma l’ultima expressio obtinguda de la seguent manera (aixo s’havia comentat al treball, pero no s’haviaarribat a desenvolupar):
dr = Rcos χdχ ⇒ ds2κ =
R2 cos2 χdχ2
1− R2 sin2 χ
R2
+R2 sin2χ(dθ
2 + sin2θdϕ
2)==
R2(1− sin2χ)dχ2
1− sin2χ
+R2 sin2χ(dθ
2 + sin2θdϕ
2)= R2 [dχ2 + sin2
χ(dθ
2 + sin2θdϕ
2)]Per al cas de curvatura negativa κ =−1, podem aprofitar les propietats del sinus hiperbolic per obtenir la seguent expres-sio, fent el canvi de variable r = Rsinh χ:
dr = Rcosh χdχ ⇒ ds2κ =
R2 cosh2χdχ2
1+ R2 sinh2 χ
R2
+R2 sinh2χ(dθ
2 + sin2θdϕ
2)==
R2(1+ sinh2χ)dχ2
1+ sinh2χ
+R2 sinh2χ(dθ
2 + sin2θdϕ
2)= R2 [dχ2 + sinh2
χ(dθ
2 + sin2θdϕ
2)]Quan la curvatura es nul·la, κ = 0, i en consonancia amb els darrers canvis de variable efectuats, es pren r = χ . Ambaixo, queda definida com segueix, la metrica d’espais de tres dimensions amb curvatura constant:
d2sκ= R2 [dχ +S2
κ(χ)dΩ2]
On dΩ2 = dθ 2 + sin2θdϕ2 i on Sκ(χ) es defineix de la seguent manera:
Sκ(χ) =
sin(χ) (κ =+1)χ (κ = 0)sinh(χ) (κ =−1)
B.2.1 Metrica de Friedmann-Lemaıtre-Robertson-Walker
Per obtenir la metrica de FLRW, afegim la quantitat−c2dt2 (resultant del ja comentat interval invariant de Lorentz) a ds2κ ,
tot tenint en consideracio que el radi de curvatura de l’espai R, varia amb el temps, R≡ a(t).
ds2 =−c2dt2 +a(t)2 [dχ2 +S2
κ(χ)dΩ2] .
14

Apendix C
El programa astro.cpp
A continuacio s’adjunta el codi font del programa desenvolupat i fet servir per obtenir les simulacions i els resultatspresentats:
#include <iostream>
#include <string>
#include <vector>
#include <math.h>
#include <fstream>
#include <algorithm>
#include <time.h>
#include <ctime>
#include <stdlib.h>
#include <stdio.h>
using namespace std;
/* Arxiu de dades de l’Univers */ ofstream astro("ASTRO.csv");
/* Arxiu de l’evolucio de la densitat total */ ofstream density("DENSITY.csv");
double const PI = 3.14159265358979323846;
/* Parametre de l’equacio d’estat */ double omega;
/* Coeficient de difusio */ double alpha;
/* No d’intervals de temps de la simulacio */ double t;
/* Coeficient d’expansio */ double a;
/* Amplitud de l’interval de temps */ double dt;
/* Constant Gravitacional */ double G;
/* Longitud del costat de la cel·la */ double dh;
// Funcio generadora de valors aleatoris
double random(double min, double max)
double result = (float)rand()/(float)(RAND_MAX) * (max - min) + min;
return result;
// Funcio imprimeix els continguts d’un vector
void print(vector <double> a)
for (int i = 0; i < a.size(); i++)
if (i != 0) astro << ",";
astro << a[i];
15

// Funcio vector diferencia
vector <double> _AB(vector <double> a, vector <double> b)
vector <double> result(a.size(),0);
for (int i = 0; i < b.size(); i++) result[i] = b[i] - a[i];
return result;
// Funcio modul d’un vector
double A(vector <double> a)
double result = 0;
for (int i = 0; i < a.size(); i++) result += a[i] * a[i];
return sqrt(result);
// Classe cel·laclass cell
public:
double rho;
double p();
double phi;
vector <double> r;
vector <double> u;
;
// Equacio d’estat
double cell::p()
double p0 = omega * rho;
return p0;
// Funcio producte escalar entre dos vectors
double dot(vector <double> a, vector <double> b)
double result = 0;
for (int i = 0; i < a.size(); i++) result += a[i] * b[i];
return result;
// Definicio general de la malla
typedef vector <vector <cell> > MESH;
int main()
srand((unsigned int)time(0));
double verify;
/* Dimensions de la malla */ int n,m;
/* Valors de densitat inicial mınima i maxima */
double rhomin;
double rhomax;
/* Potencial gravitatori */ double PHI = 0;
vector <double> R(2,0);
vector <double> U(2,0);
MESH M(n,vector <cell>(m));
16

// S’assignen valors de densitat i posicio a cada cel·lafor (int i = 0; i < n; i++)
for (int j = 0; j < m; j++)
R[0] = i * dh; R[1] = j * dh;
U[0] = 0; U[1] = 0;
M[i][j].r = R;
M[i][j].rho = random(rhomin,rhomax);
// Es calcula el potencial gravitatori a la cel·la de posicio (0,0)
if (i != 0 && j != 0) PHI -= G * M[i][j].rho * pow(dh,3) / A(M[i][j].r);
M[i][j].u = U;
// Es genera el camp de potencial gravitatori perturbat
for (int i = 0; i < n; i++)
for (int j = 0; j < m; j++)
M[i][j].phi = PHI + random(0,0.1);
astro.setf(ios::fixed);
astro.precision(6);
vector <double> X(2,0);
vector <double> Y(2,0);
vector <double> DGRAD(2,0);
vector <vector <double> > UiGRAD(2,vector <double> (2,0));
vector <double> GGRAD(2,0);
vector <double> PGRAD(2,0);
double UDIV;
double UiDIV;
double TOTAL_DENSITY = 0;
// S’inicia la iteracio per a cada valor de temps
for (int t0 = 0; t0 < t; t0++)
TOTAL_DENSITY = 0;
for (int i = 0; i < n; i++)
for (int j = 0; j < m; j++)
// Aplicacio de "periodic boundary conditions"
X[0] = i - 1; X[1] = i + 1;
Y[0] = j - 1; Y[1] = j + 1;
if (i == n - 1) X[1] = 0;
if (i == 0) X[0] = n - 1;
if (j == m - 1) Y[1] = 0;
if (j == 0) Y[0] = m - 1;
// Calcul de la divergencia de la velocitat
UDIV = (M[X[1]][j].u[0] - M[X[0]][j].u[0]) / (2 * dh) +
(M[i][Y[1]].u[1] - M[i][Y[0]].u[1]) / (2 * dh);
// Calcul del gradient de la densitat
DGRAD[0] = (M[X[1]][j].rho - M[X[0]][j].rho) / (2 * dh);
DGRAD[1] = (M[i][Y[1]].rho - M[i][Y[0]].rho) / (2 * dh);
17

// Aplicacio de l’equacio de la continuıtat
M[i][j].rho -= dt * (dot(DGRAD,M[i][j].u) + (UDIV * M[i][j].rho));
// Difusio de la densitat
M[i][j].rho += alpha * dt * ((M[X[1]][j].rho + M[X[0]][j].rho) +
(M[i][Y[1]].rho + M[i][Y[0]].rho) -
(4 * M[i][j].rho)) / (dh * dh);
// Calcul del gradient de cada component de la velocitat
UiGRAD[0][0] = (M[X[1]][j].u[0] - M[X[0]][j].u[0]) / (2 * dh);
UiGRAD[0][1] = (M[i][Y[1]].u[0] - M[i][Y[0]].u[0]) / (2 * dh);
UiGRAD[1][0] = (M[X[1]][j].u[1] - M[X[0]][j].u[1]) / (2 * dh);
UiGRAD[1][1] = (M[i][Y[1]].u[1] - M[i][Y[0]].u[1]) / (2 * dh);
// Calcul del gradient de la pressio
PGRAD[0] = (M[X[1]][j].p() - M[X[0]][j].p()) / (2 * dh);
PGRAD[1] = (M[i][Y[1]].p() - M[i][Y[0]].p()) / (2 * dh);
// Calcul del gradient del potencial gravitatori
GGRAD[0] = (M[X[1]][j].phi - M[X[0]][j].phi) / (2 * dh);
GGRAD[1] = (M[i][Y[1]].phi - M[i][Y[0]].phi) / (2 * dh);
// Aplicacio de l’equacio de Poisson
// per obtenir el potencial gravitatori
M[i][j].phi = ((M[X[1]][j].phi + M[X[0]][j].phi) +
(M[i][Y[1]].phi + M[i][Y[0]].phi) -
(4 * G * PI * M[i][j].rho * dh * dh)) / 4;
// Aplicacio de l’equacio de la conservacio del moment lineal
for (int l = 0; l < 2; l++)
UiDIV = 0;
for (int p = 0; p < 2; p++) UiDIV += M[i][j].u[p] * UiGRAD[l][p];
M[i][j].u[l] -= dt * ((PGRAD[l] / M[i][j].rho) + GGRAD[l] + UiDIV);
if (M[i][j].rho < 0)
M[i][j].rho = ((M[X[1]][j].rho + M[X[0]][j].rho) +
(M[i][Y[1]].rho + M[i][Y[0]].rho)) / 4;
TOTAL_DENSITY += M[i][j].rho;
density << t0 * dt << "," << TOTAL_DENSITY << endl;
// S’imprimeix a pantalla el temps
// cada vegada que han transcorregut 10 intervals,
// notificant aixı el progres de la simulacio.
if (t0 % 10 == 0)
cout << t0 << " => "<< t0 * dt << endl;
18

// S’obte l’arxiu de sortida
// quan la iteracio anterior s’ha completat
for (int i = 0; i < n; i++)
for (int j = 0; j < m; j++)
print(M[i][j].r);
astro << ",";
astro << M[i][j].p();
astro << ",";
astro << M[i][j].rho;
astro << ",";
astro << M[i][j].phi;
astro << ",";
print(M[i][j].u);
astro << endl;
19