Embed Size (px)
Citation preview

Metric based KNN indexing
Lecturer : Prof Ooi Beng Chin
Presenters : Frankie Chan HT00-3550YTan Zhenqiang
HT01-6163J

Outline
Introduction Examples SR-Tree MVP-Tree
Future works Conclusion References

Introduction
Metric based queries – consider relative distance of object/point from a given query point Most commonly used metric is the Euclidean metric

Metric based queries
Variations : used with joins queries – find 3
closest restaurants for each of 2 different theaters
used with spatial queries – find KNN to east of a location

SR-Tree“The SR-tree: An Indexing Structure for
High-Dimensional Nearest Neighbor Queries.”
Norio Katayama Shin’ichi SatohMultimedia Info. Research Div. Software Research Div.National Institute of Informatics National Institute of Informatics
SR-Tree : Introduction
SR-tree stands for “Sphere/Rectangle-Tree”SR-Tree is an extension of the R*-tree and the SS-treeA region of the SR-tree is specified by the intersection of a bounding sphere and a bounding rectangle

The R*-Tree Structure

The SS-Tree Structure

Definitions (SR-Tree)
The diameter of a bounded region means diameter of a bounding sphere for the
SS-Tree diagonal of a bounding rectangle for
theR*-Tree

Properties
Bounding rectangles divides points into smaller volume regions. But tends to have longer diameters than bounding spheres, especially in high-dimensional space.
Bounding spheres divides points into short-diameter regions. But tends to have larger volumes than bounding rectangles.

Properties
SR-Tree combined the use of bounding sphere and bounding rectangle, as the properties are complementary to each other.

The SR-Tree Structure

Bounded regions

Indexing Structure
The structure of the leaf L :
The structure of the node N :

Insertion Algorithm
SR-tree insertion algorithm is based on SS-tree’s centroid-based algorithm Descend down the tree and choose a subtree with the centroid nearest to the new entry SR-tree algorithm updates both bounding spheres (diff. from SS-tree) and bounding rectangles (same as R*-tree)

Insertion Algorithm
Bounding sphere computation : Center, X (X1 ,X2 ,……..,XD)
Radius, r
Deletion Algorithm
SR-tree deletion algorithm is similar to that of the R-tree If entry deletion do not cause leaf/node under-utilisation, then just remove it Otherwise, remove under-utilised leaf/node and reinsert all orphaned entries

Nearest Neighbour Search
Algorithm – ordered depth-first search It finds a number of points nearest to the query, to make a candidate set Then it revises the candidate set, when it
visits every leaf whose region overlaps the range of the candidate set
After it visited all leave, the final candidate is
the search result

Definition (NN search)
Minimum Distance (MINDIST) euclidean distance from query point to the bounded region Minimax Distance (MINMAXDIST) minimum value of all the maximum distances between the query point and points on each n axes respectively

Definition (NN search)

Search pruning
Region R1 with MINDIST greater than MINMAXDIST of another region R2 is discarded, because it cannot contain NN (downward pruning)
Actual distance from query point P to a given object O which is greater than MINMAXDIST of a region, is discarded (upward pruning)
Region with MINDIST greater than the actual distance from query point P to an object O, is discarded (upward pruning)

Recursive procedure (leaf node)
If Node.type = LEAF thenFor I := 1 to Node.count
dist := objectDist(Pt,Node.region)if (dist < Nearest.dist) then
Nearest.dist := distNearest.region :=
Node.region

Recursive procedure (non-leaf node)
Else /* non-leaf node => order, sort, prune & visit node */
genBranchList(Pt,Node,branchList)sortBranchList(branchList)/* perform downward pruning */last = pruneBranch(Node,Pt,NearestBranchList)For I := 1 to last newNode := Node.branch nearestNeighborSearch(newNode,Pt,Nearest) /* perform upward pruning */ last := pruneBranchList(Node,Pt,Nearest, branchList)
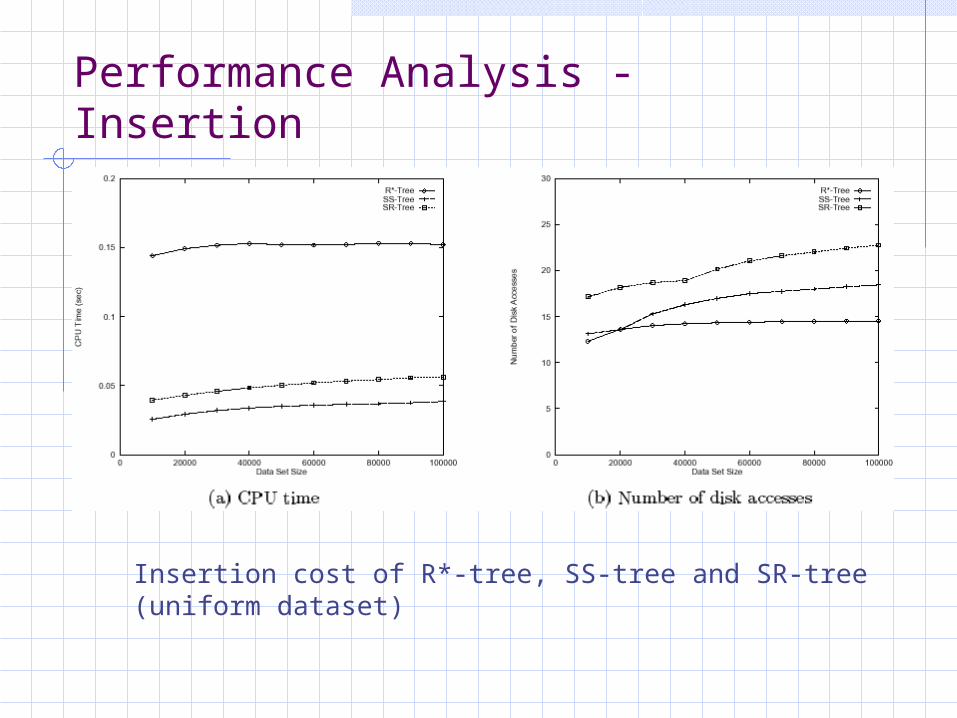
Performance Analysis - Insertion
Insertion cost of R*-tree, SS-tree and SR-tree (uniform dataset)

Performance Analysis - Query
Performance of VAMSplit R-tree, SS-tree and SR-tree(Uniform dataset)

Performance Analysis - Query
Performance of VAMSplit R-tree, SS-tree and SR-tree(Real dataset)

SR-tree average volume & diameter
Average volume & diameter of the leaf-level regions of R*-tree, SS-tree and SR-tree (real dataset)
Strengths
SR-Tree divides points into regions with small volumes and short diameter.Division of points into smaller regions improves disjointness.Smaller volume and diameter enhances the nearest neighbour queries’ performance.

Weaknesses
SR-tree suffers from the fanout problem (branching factor – max node entries)The node size grows as dimensionality increasesThe reduction of the fanout may requires more nodes to be read on queriesPossibly affect query performance

MVP-Tree
“Indexing Large Metric Spaces For Similarity Search Queries”
Tolga Bozkaya Meral OzsoyogluOracle corporation Dept. Comp Eng & Sci Case Western Reserve Univ.

Outline
Main idea.Algorithm basisHow to build mvp-tree based on the
given data.How to do similarity search in mvp-
tree.Performance analysis and
comparison based on experiments.

Main Idea
Triangle Inequality. Distance based IndexingAdopt more vantage points and levelsPre-computed distances are kept in leaf node.Use pre-computed distances to prune query branches.

Algorithm Basis
vp1,vp2,vp3 are vantage points.Q is given query pointp1 belongs to points setThe more vantage points the more unnecessary query branches are pruned.The distance between two vantage points is normally the larger the better

How to construct mvp-tree(m,k,p)
1) If | S | = 0 then create an empty tree and quit.2) If | S | k then Create leaf node L, put all data to L, Quit.3) Choose first vantage point Svp1, Keep distances in arrays.
4) Divide S into m groups with same cardinalities based on the distances between Svp1 to points in S. And keeps distances as well.
5) For the first v above group 5.1) Choose last point in previous group as new vantage point. 5.2) Divide the group into m sub-groups with same cardinalities
based on the distances between Svp1 to points in S. And keeps distances as well.6) Recursively create mvp-tree on the mv sub-groups based on the steps from 1) to 5).
Example
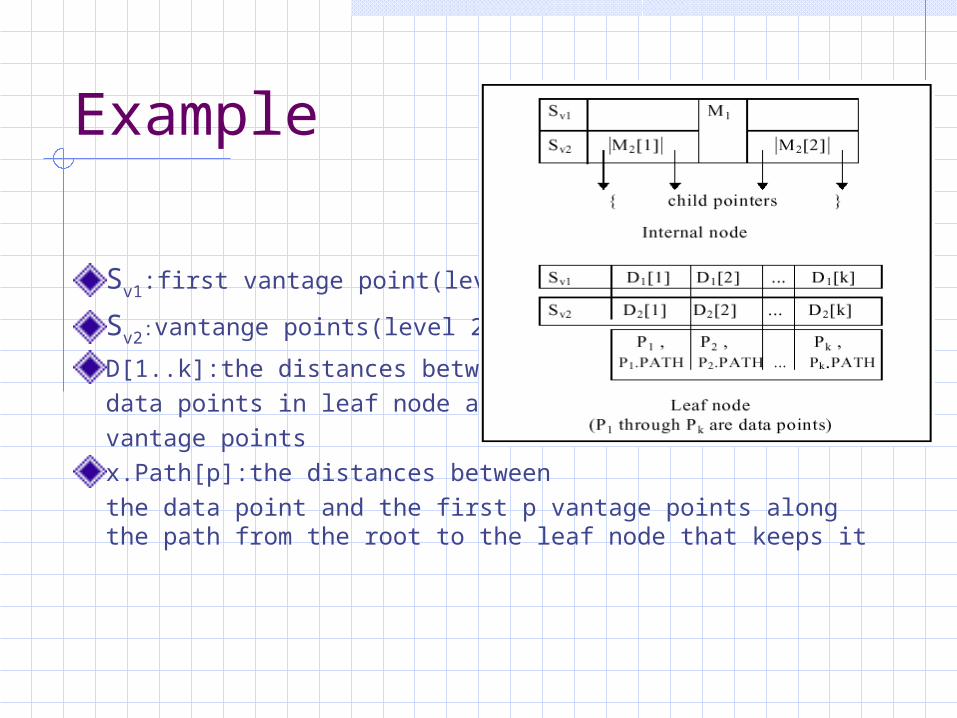
Sv1:first vantage point(level 1)
Sv2:vantange points(level 2)
D[1..k]:the distances between data points in leaf node and vantage pointsx.Path[p]:the distances between the data point and the first p vantage points along the path from the root to the leaf node that keeps it
How to do similarity search
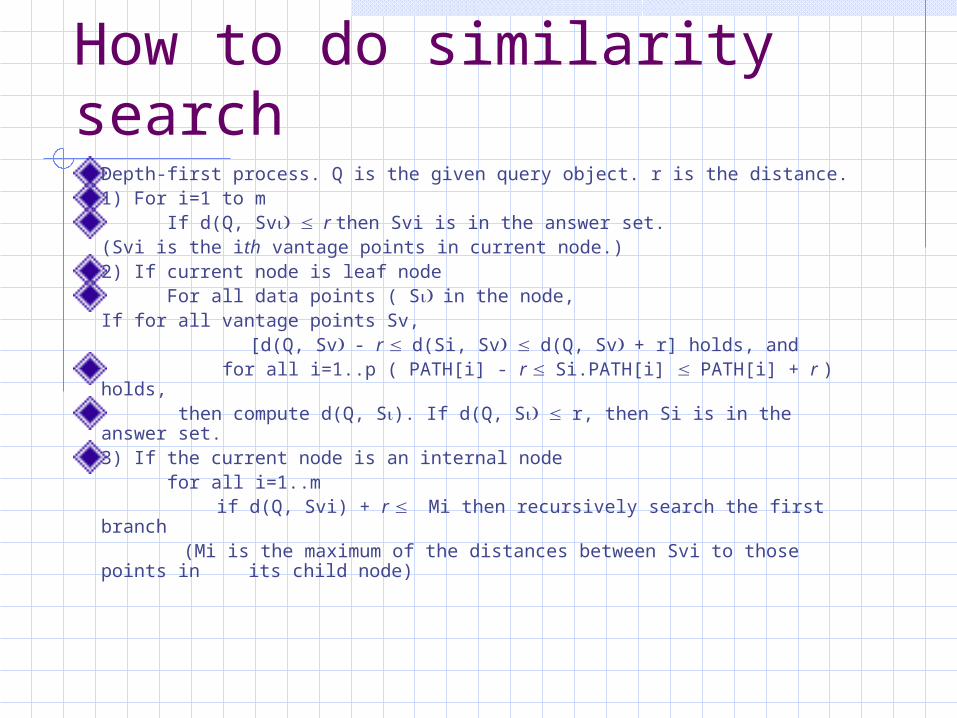
Depth-first process. Q is the given query object. r is the distance. 1) For i=1 to m If d(Q, Svr then Svi is in the answer set.
(Svi is the ith vantage points in current node.)2) If current node is leaf node For all data points ( Sin the node,
If for all vantage points Sv, [d(Q, Sv- r d(Si, Svd(Q, Sv+ r] holds, and
for all i=1..p ( PATH[i] - r Si.PATH[i] PATH[i] + r ) holds, then compute d(Q, S). If d(Q, Sr, then Si is in the answer set.3) If the current node is an internal node for all i=1..m
if d(Q, Svi) + r Mi then recursively search the first branch (Mi is the maximum of the distances between Svi to those points in
its child node)

Comparison Experiment
Performance results for the queries with the data set where data points form several physical clusters

Performance Analysis
Experiments to compare mvp-trees with vp-trees but use only one vantage point at each level, and do not make use of the pre-computed distances show that mvp-tree outperforms the vp-tree by 20% to 80% for varying query ranges and different distance distributions. For small query ranges, experiments with Euclidean vectors showed that mvp-trees require 40% to 80% less distance computation compared to vp-trees. For higher query ranges, the percentagewise difference decrease gradually, yet mvp-trees still perform better, making up to 30% less distance computations for the largest query ranges used. Experiments on gray-level images using the data set with 1151 images show mvp-trees performed up to 20-30% less distance computations.

Strengths Based on the thoughts of triangle inequality, more vantage points more unnecessary query branches pruned, the longer distances among vantage points the better and reusing pre-computed distances as much as possible. Mvp-tree is flatter than vp-tree. It is also balanced because of the way it is constructed.Experiments show that it is more efficient than vp- tree and M-tree.

Weaknesses 1.Construction cost O(nlogmn) distances computations 2.Additional storage cost are very high. There must be
an array of size of p in every data point in leaf node. 3.Updating and inserting data points maybe lead to
reconstruction of the mvp-tree. 4.If the insertions cause the tree structure to be
skewed (that is, the additions of new data points change the distance distribution of the whole data set), global restructuring may have to be done, possibly during off hours of operation.
5.As the mvp-tree is created from an initial set of data objects in a top-down fashion, it is a rather static index structure.

Conclusion metric based indexing can be effective for high dimensional and non-uniform datasets (eg. Image/video similarity indexing) future work : algorithm to perform in both dynamic
& static database environment analyse the use of metric with other
attributes to enable range queries
ReferencesN. Katayama and S. Satoh. The SR-tree: An Indexing Structure for High-Dimensional Nearest Neighbor Queries. Proc. ACM SIGMOD Int. Conf. on Management of Data, pages 369--380, Tucson, Arizona, 1997.
R. Kurniawati, J. S. Jin, and J. A. Shepherd. The SS + -tree: An Improved Index Structure for Similarity Searches in a High-Dimensional Feature Space. SPIE: Storage and Retrieval for Image and Video Databases V , pages 110--120, 1997.
N. Beckmann, H.P. Kriegel, R. Schneider, and B. Seeger. The R*tree : An Efcient and Robust Access Method for Points and Rectangles. In Proc. ACM SIGMOD Intl. Symp. on the Management of Data, pages 322--331, 1990.
N. Roussopoulosi, S. Kelley, and F. Vincent. Nearest Neighbor Queries. Proc. ACM SIGMOD, San Jose, USA, pages 71-79, May 1995.
Tolga Bozkaya and Meral Ozsoyoglu. Indexing Large Metric Spaces For Similarity Search Queries. Association for Computing Machinery transactions on Database System, pages 1-34, 1999.
Roberto Figueira Santos Filho, Agma Traina, Caetano Traina Jr and Christos Faloutsos. Similarity Search Without Tears: The OMNI-Family Of All-Purpose Access Methods. ICDE 2001.





























