Embed Size (px)
Citation preview

Mon. Not. R. Astron. Soc. 406, 2038–2046 (2010) doi:10.1111/j.1365-2966.2010.16818.x
Methods for exomoon characterization: combining transit photometryand the Rossiter–McLaughlin effect
A. E. Simon,1,2� Gy. M. Szabo,1,2� K. Szatmary2� and L. L. Kiss1,3�1Konkoly Observatory of the Hungarian Academy of Sciences, PO Box 67, H-1525 Budapest, Hungary2Department of Experimental Physics and Astronomical Observatory, University of Szeged, 6720 Szeged, Hungary3Sydney Institute for Astronomy, School of Physics A28, University of Sydney, NSW 2006, Australia
Accepted 2010 April 8. Received 2010 April 1; in original form 2010 January 7
ABSTRACTIt has been suggested that moons around transiting exoplanets may cause an observable signalin transit photometry or in the Rossiter–McLaughlin (RM) effect. In this paper, a detailedanalysis of parameter reconstruction from the RM effect is presented for various planet–moonconfigurations, described with 20 parameters. We also demonstrate the benefits of combiningphotometry with the RM effect. We simulated 2.7 × 109 configurations of a generic transitingsystem to map the confidence region of the parameters of the moon, find the correlatedparameters and determine the validity of reconstructions. The main conclusion is that thestrictest constraints from the RM effect are expected for the radius of the moon. In some cases,there is also meaningful information on its orbital period. When the transit time of the moonis exactly known, for example from transit photometry, the angle parameters of the moon’sorbit will also be constrained from the RM effect. From transit light curves the mass can bedetermined, and combining this result with the radius from the RM effect, the experimentaldetermination of the density of the moon is also possible.
Key words: methods: numerical – techniques: photometric – techniques: radial velocities –planets and satellites: detection – planetary systems.
1 IN T RO D U C T I O N
The number of known transiting exoplanets is rapidly increasing,which has recently inspired significant interest as to whether theycan host a detectable moon (e.g. Szabo et al. 2006; Simon, Szatmary& Szabo 2007; Kipping 2008, 2009; Kipping, Fossey & Campanella2009; Simon, Szabo & Szatmary 2009). Historically, our Moon hasconstantly inspired scientific research and it has played a key rolein supporting life on Earth (e.g. Wagner 1936; Asimov 1979). Itmay be that the presence of a large exomoon is a sine qua nonrequirement for the development of intelligent civilization on anexoplanet.
Although there has been no such example where the presenceof a satellite was proven, several methods have already been in-vestigated for such a detection in the future [barycentric TransitTiming Variation (TTVb), Sartoretti & Schneider (1999), Kipping(2008); photocentric Transit Timing Variation (TTVp), Szabo et al.(2006), Simon et al. (2007); Transit Duration Variation (TDV),Kipping (2009); Time-of-Arrival analysis of pulsars, Lewis, Sackett& Mardling (2008); microlensing, Liebig & Wambsganss (2009)].
�E-mail: [email protected] (AES); [email protected] (GMS);[email protected] (KS); [email protected] (LLK)
Deviations from perfect periodic timing of transits might suggestthe presence of a moon (Dıaz et al. 2008), perturbing planets (Agolet al. 2005) or indicate periastron precession (Pal & Kocsis 2008).
All these methods (excluding microlensing) rely on transit pho-tometry. In the era of ultraprecise space photometry (CoRoT,Kepler), one can expect accurate light curves of 0.1 mmag thatpromise the discovery of Moon-like satellites of Earth-like planets(Szabo et al. 2006; Kipping et al. 2009). Additionally, the ∼1 cm s−1
velocimetric accuracy is promised with laser frequency combs (Liet al. 2008). Radial velocity (RV) measurements during a transithave already played an important role in understanding the planetvia its Rossiter–McLaughlin (RM) effect (Gaudi & Winn 2007),and the prospects of exomoon detection in this way are quite en-couraging.
Here we continue our previous investigations by invoking theRM effect as a possible tool in characterizing exomoons. Earlierwe described a photometric method, the TTVp (Szabo et al. 2006),that is very sensitive to the presence of transiting moons. In Simonet al. (2007), we examined which moons can be detected withthis method in space observatory measurements, with respect todifferent values of M masses, R radii and P orbital periods. InSimon et al. (2009), we demonstrated that another method, basedon the RM effect of the moon, is also capable of attaining theobservational signature of a possible satellite. Now we give a full
C© 2010 The Authors. Journal compilation C© 2010 RAS

Methods for exomoon characterization 2039
description of the parameter reconstruction from the RM effect.An error analysis is also presented: from simulated transits, weexamine which parameters of the satellite can be recovered at acertain signal-to-noise ratio (S/N) of the measurements.
2 SI M U L AT I O N S
We developed a new algorithm for precise calculations of arbitrarytransiting systems with a satellite. The observed quantities are thelight curve and the RM curve. The masses, radii, orbital periods,inclinations and ascending nodes of the planet and the satellite areinput parameters. The orbital phase of the satellite at mid-transit isalso adjustable. The dynamical evolution of such a system is givenby a three-body problem. At this point, we included an approxima-tion where the planet and the satellite orbit around their barycentreand this barycentre orbits the star with uniform velocity. To excludethe short-time escape of the moon, the system had to fulfil the cri-terion on the Hill sphere and must orbit at larger radius than theRoche limit (Szabo et al. 2006).
The star is parametrized by its mass and limb darkening (Phoenixlinear limb-darkening coefficients are default; Claret 2000). Stellarradius is calculated from the mass using the models of the Padovaisochrones with solar metallicity (Girardi et al. 2002). The apparentbrightness and the RV of the star change while the satellite transits.These observables are calculated by integrating over a simulatedand discretized stellar disc. Where the planet and the satellite hidethe stellar surface, pixels get zero weight. We use a model star witha radius of 1000 pixels. The pixels are rectangular, and each hastwo values: (i) local surface brightness and (ii) local velocity of thesurface element, calculated from the radius, the stellar spin periodand the position of the pixel.
The radii of orbits (planets and satellites) are calculated from theorbital periods, according to Kepler’s third law. The velocity vectorsof the planet and the moon are derived from their position vectorsand their orbital periods. These determine the RV of the barycen-tre of the star via the criterion of the conservation of momentum,leading to a simple dynamical dumbbell model.
This algorithm is implemented in a user-friendly GUI interface1
with four animated simulation windows in a shared Front Panel.They show (i) a distant view of the orbit of the planet and thesatellite, (ii) a zoom into the transit geometry, (iii) the surface ofthe star with the transiting objects and (iv) the light curves andRM curves. The input parameters, stability information and appliedtime-step are indicated in the parameter panel (main window; Simonet al. 2009).
The user can set the time-step and can select real time or back-ground calculations. It is also possible to generate a large numberof photometric and RM curves using system parameters randomlywithin a given interval. The output files contain a detailed file headerwith the system data and three columns with values of time, mag-nitude and RV data.
2.1 Sample simulations
We simulated many systems with various parameters and identifieddifferent transit scenarios that lead to morphologically different lightcurves and RM curves. This will lead to a classification of transitgeometries from an observational point of view. First, we simulatedthe two most prominent examples in our Solar system: the transit
1Under Labview Environment, NI Instruments, www.ni.com/labview
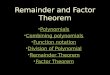
of Earth with the Moon and the transit of Jupiter with Ganymede.The light curve and RM curves are presented in the upper panels ofFig. 1. We concluded that the photometric effects of these moonsare too little for a direct detection: they are in the order of 5–10 ppm.This is an order of magnitude less than the photometric accuracyof the Kepler space telescope (255-ppm rms in the time series of115 quiet stars in Short Cadence Data; Gilliland et al. 2010). TheRM effect due to the moon is again very small, 1 and 4 cm s−1.These velocity deviations are beyond the current technology andare also much smaller than the intrinsic stellar noise for a widerange of stellar parameters (cf. Section 4). For these configurations,the only chance for the detection is the TTVp (Szabo et al. 2006;Simon et al. 2007). If the moon is so close that during one transit itorbits the planet more than once, then this can lead to marked waves(wobbling) in the RM curve (Fig. 2, lower panels) that can have anamplitude of 10–100 cm s−1.
The lower panels of Fig. 1 show systems where the detection ismore promising. We designed systems with a little star and verylarge, Earth-sized moons of transiting Saturn-like planets. The dataof the systems are summarized in Table 1. Here, the effects ofthe moon can be as large as 730 ppm in photometry or 80 cm s−1
in RV. Both values are promising, so the conclusion is that if suchsystems exist, they could be discovered with the present techniques.In these particular examples, the moons orbit very close to the planetand mutual planet–satellite eclipses may occur, but the presenceof mutual eclipses is not a necessary criterion for a successfuldiscovery. The most important parameter is the size of the Moon,which must be in the order of the size of the Earth. This is the sizethat can cause directly observable effects, almost regardless of theorbital period of the satellite itself.
2.2 Classification of transit scenarios
By now, there are several methods that offer the detection of exo-moons while they are not equivalently effective for different transitconfigurations. A possible classification scheme for transits is pro-posed here from the point of view of the applicable methods.
We have run many transits with the purpose of mapping the entireparameter space. These lead to different morphologies of the lightcurve and RM curve; therefore, different methods are required todetect the moon itself in the measurements.
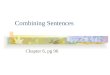
There are three distinctly different geometrical configurationswhich we call as the ‘static’ moon, the ‘slow’ moon and the ‘rapid’moon. A ‘static’ moon means that it has a very long orbital period,comparable to that of the planet itself. In such a configuration, therelative position of the moon to the planet does not change signif-icantly during one transit. Thus, one transit of the planet and onetransit of the moon, superimposed to each other, are observed. Theshapes of the light curves and RM curves are the same for the planetand the moon, but time-lagged because of the geometry (upper-leftpanel in Fig. 2). In extreme cases, e.g. when the semimajor axis ofthe moon is greater than the stellar diameter, the planet may com-plete the entire transit before the moon contacts the stellar disc, inwhich case we observe totally distinct ‘planet’ and ‘moon’ transits– the latter with a much smaller depth.
In the case of a ‘slow’ moon, a difference can be detected betweenthe duration of the transit of the moon and that of the planet, dueto the slowly changing relative position during the event. This isfavourable because the orbital period can also be estimated fromone single transit observation (cf. Section 4).
In the two cases described above, there are some scenarios whenonly the planet or the moon transits completely, resulting in a short
C© 2010 The Authors. Journal compilation C© 2010 RAS, MNRAS 406, 2038–2046

2040 A. E. Simon et al.
0
20
40
60
80
100
pp
m
moon effect 5 ppm
-0.06
-0.03
0
0.03
0.06
-600 -400 -200 0 200 400 600
RM
sta
r [m
/s]
Time [min]
moon effect 1 cm/s
0
2000
4000
6000
8000
10000
pp
m
moon effect 10 ppm
-6-4-2 0 2 4 6
-1500 -1000 -500 0 500 1000 1500
RM
sta
r [m
/s]
Time [min]
moon effect 4 cm/s
0
4000
8000
12000
pp
m
moon effect 645 ppm
-15-10-5 0 5
10 15
-300 -200 -100 0 100 200 300
RM
sta
r [m
/s]
Time [min]
moon effect 80 cm/s
0
4000
8000
12000
16000
pp
m
moon effect (wobbling) 730 ppm
-15-10
-5 0 5
10 15
-400 -200 0 200 400
RM
sta
r [m
/s]
Time [min]
moon effect (rad. vel.woobling) 40 cm/s
Figure 1. Sample transit simulations. The four panels show the light curves in the upper panels and the RM curves in the lower ones. Upper left: the Earth–Moonsystem; upper right: the Jupiter–Ganymede-like system; lower left: simulation 3; lower right: simulation 4. See Table 1 for the parameters.
grazing eclipse of the stellar disc by the planet or the moon (‘tangentplanet’ configuration; see Fig. 2, upper right). There is another set-up when the moon does not transit at all, but causes TTV and TDVin the transit of the planet. The lower-right panel in Fig. 2 showstwo such transits with the moon on the opposite sides of the planet.
In the third case, the satellite orbits rapidly, which produces acharacteristic wobbling in the light curves and the RM curves. Thegreat variety of such extreme geometries is interesting, but the largediversity of possible scenarios does not enable drawing a consistentpicture (see Fig. 2, lower left, for an example).
These configurations prominently differ and give different ob-servable effects. In Table 2, we summarize all the cases, togetherwith the methods that can be applied to detect the satellite. In thefollowing, we restrict the discussion to the slow and static moons.
3 IN V E R S I O N O F TH ERO SSITER–MCLAU GHLIN EFFECT
The task of analysing real observations is to recognize the presenceof an exomoon if it exists and to estimate its parameters and pa-rameter errors. Here we present an elaborated analysis of parameterreconstruction, correlations and degeneracies from noisy simulatedobservations utilizing bounded error analysis. The transiting modelsystem consists of a Uranus-sized planet with one large, Earth-sized
moon around a 0.8-M�, star (see data of Simulation 5). The RMcurve has been equidistantly sampled in 3-min stepsize and thennoisified with various amounts (20, 50, 100 cm s−1) of uniformnoise. While the RM effect of the moon itself had 1 m s−1 ampli-tude, these refer to approximate S/Ns (of the moon) of 5, 2 and 1,respectively (Fig. 3).
It is worth noting that we do not claim that the RM effect isefficient enough for discovering exomoons. Our aim here is to un-derstand which parameters can be extracted from RM observations,regardless of to what extent they can be constrained from transitphotometry.
A joint analysis of the RM effect and transit photometry is beyondthe scope of this paper and will be discussed in a forthcomingpublication.
3.1 Parameter reconstruction
Let P and M denote the real parameter vectors of the planet and themoon, respectively, which are to be estimated from the observations.For this, we need to locate the parameter vectors of the planet, Pi ,and the moon, Mi , that tune the simulator into a good agreement withthe observed data. Let vr,sim be the template RM curves (they arenot noisy) and vr,obs be the observed data (simulated observations),which are noisy. The best-fitting parameters of the planet, P , havebeen determined by minimizing the rms scatter of the residuals
C© 2010 The Authors. Journal compilation C© 2010 RAS, MNRAS 406, 2038–2046

Methods for exomoon characterization 2041
-0.04
-0.02
0
0.02
0.04
0.06
0.08
-600 -400 -200 0 200 400 600
RM
sta
r [m
/s]
Time [min]
-1.5
-1
-0.5
0
0.5
-300 -200 -100 0 100 200 300 400
RM
sta
r [m
/s]
Time [min]
-10
-5
0
5
10
15
-800 -600 -400 -200 0 200 400 600
RM
sta
r [m
/s]
Time [min]
-10
-8
-6
-4
-2
0
2
4
6
8
10
-300 -200 -100 0 100 200 300
RM
sta
r [m
/s]
Time [min]
Figure 2. Four examples of the RM effect with different transit geometries. Each panel shows the effects of the moon superimposed on the RM curve andthe system configuration during the transit. The big circle with axis, the big spot and the dot in the small circle represent the star, the planet and the moon,respectively. The illustrations are to scale.
between observations and templates containing a single planet only:
P = arg minPi
[∑(vr,obs − vr,sim,Pi
)2]. (1)
We determine M, the parameter vector of the moon in the secondstep. The residuals between the observations and the planet templatecontain the signal from the moon and the noise. We fit this residualby tuning the parameters of the moon:
M = arg minMi
[∑(vr,obs − vr,sim,P − vr,sim,P,Mi
)2]. (2)
In this formulation, we decoupled the parameter estimation ofthe planet and that of the moon. Our tests have proven that thiscan be done. This is because the RM signal of the moon is only aslight perturbation in the RM pattern of the planet. Thus, the planetparameters can be reconstructed accurately enough that they do notinfluence the selection of the appropriate moon model in the secondstep.
3.2 Error analysis
After determining the parameters of the star and the planet, thereremain six independent parameters of the moon. The confidenceregion in this six-dimensional hyperspace has been mapped intwo-dimensional plane sections that the 15 possible parameter–parameter pairs span. Ax1,x2 is the joint confidence region (region
of acceptance) of x1 and x2 in the X = x1, x2, . . . hyperspace if
∫Ax1,x2
P (obs|X) dX = C, (3)
where obs means the observed data set with errors and C is thelevel of confidence. The smallest confidence interval at a givenC confidence is conjured by a certain likelihood value that canbe determined experimentally. The P () probabilities are calculatedfrom the reduced standard deviations of the fits, using χ 2 statistics.With this definition of the confidence interval the correlations canbe recognized easily, because correlated parameters depend a lot oneach other in the region of acceptance. A parameter that can be wellreconstructed must have a small confidence interval in all sectionsand must not be strongly correlated with other parameters.
We have run a large number of models in the parameter space.First, we fitted a single-planet model to the simulated observationsand minimized the residuals. In this step, we have run 1000 ran-domly simulated planets to map the structure of the grid, to estimatethe minimum. Then we refined the grid locally and run 104 planettemplates. Among them, ≈10 possible planet solutions gave equiv-alently small residuals, ensuring that the grid was fine enough. Theparameters of the best-fitting planet were input parameters for mod-elling the moon.
In the second step, 1.5×106 transits were simulated with randominitial geometries of the satellite. The templates were allowed to shift
C© 2010 The Authors. Journal compilation C© 2010 RAS, MNRAS 406, 2038–2046

2042 A. E. Simon et al.
Table 1. Input data of the simulations. ‘Asc. node’ means the anglebetween the line of sight and the line of intersection of the planet’sorbital plane and the star’s equatorial plane, measured in the star’sequatorial plane.
Simulation 1(‘Earth’) Star Planet SatelliteLimb dark. (u) 0.65Mass (M) 1.00 M� 0.0032 MJupiter 0.0123 MEarth
Radius (R) 1.00 R� 0.0920 RJupiter 0.2720 REarth
Rot. period (Prot) 28.00 dOrb. period (P ) 365.25 d 27.30 dInclination (ι) 90◦ 90◦Asc. node (�) 0◦ 0◦
Simulation 2(‘Jupiter) Star Planet SatelliteLimb dark. (u) 0.65Mass (M) 1.00 M� 1.00 MJupiter 0.0246 MEarth
Radius (R) 1.00 R� 1.00 RJupiter 0.4125 REarth
Rot. period (Prot) 28.00 dOrb. period (P ) 4332.71 d 7.15 dInclination(ι) 70◦ 90◦Asc. node (�) −0.◦10 0◦
Simulation 3 Star Planet SatelliteLimb dark. (u) 0.20Mass (M) 0.30 M� 0.15 MJupiter 1 MEarth
Radius (R) 0.36 R� 0.40 RJupiter 1 REarth
Rot. period (Prot) 10 dOrb. period (P ) 600 days 0.3 dInclination (ι) 65◦ 80◦Asc. node (�) 0◦04 0◦
Simulation 4 Star Planet SatelliteLimb dark. (u) 0.20Mass (M) 0.30 M� 0.15 MJupiter 1 MEarth
Radius (R) 0.36 R� 0.45 RJupiter 1 REarth
Rot. period (Prot) 10 dOrb. period (P ) 4300 d 0.2 dInclination (ι) 70◦ 80◦Asc. node (�) 0◦04 0◦
Simulation 5 Star Planet SatelliteLimb dark. (u) 0.65Mass (M) 0.80 M� 0.20 MJupiter 1 MEarth
Radius (R) 0.83 R� 0.40 RJupiter 1 REarth
Rot. period (Prot) 3 dOrb. period (P ) 200 d 5 dInclination (ι) 75◦ 60◦Asc. node (�) 0◦5 45◦
Table 2. Transit classification and proposed methods fordetecting the moon. LC: direct detection in the lightcurves, TTVb and TTVp: barycentric and photocentricTTV, TDV: transit duration variation, RM: the RM effect,RM(TV): transit timing variation of the RM effect.
Static Slow Rapidmoon moon moon
Full LC, TTVb, LC, TTVb, LC (wobbling),Transit TTVp, RM TTVp, TDV RM (wobbling)
RM
Tangentplanet LC, RM LC, RM LC, RMPlanet TTVb, TTVb, TDV TTVb, TDV,only RM(TV) RM RM
-15
-10
-5
0
5
10
15
RM
sta
r [m
/s]
-1.5
0
1.5
-1.5
0
1.5
RM
sta
r [m
/s]
-1.5
0
1.5
-600 -400 -200 0 200 400 600
Time [min]
Figure 3. A simulated observation (upper panels) and the residuals afterfitting a single planet solution (lower panels). The latter plots correspond tothe S/N = 5, 2 and 1 levels.
in time while fitting to the simulated observations. These resultedin 2.7 × 109 fittings altogether.
The likelihood limit defining the 95 per cent confidence regionhas been deduced from the surface of rms scatter experimentally.For this, 1000 bootstrap observations were calculated using theexact system parameters, noisified with different realizations of thesame simulated observational noise. Then we determined the best-fitting model planet and calculated the residuals to the M (simulationinput) moon model. We mapped the 95 per cent acceptance regionsof parameters; therefore, the rms scatter limit was set to include95 per cent of these deviations. The resulting limits were rms scatterof 0.149, 0.313 and 0.609 m s−1 for the simulated observationsof S/N = 5, 2 and 1 quality, respectively. These are, of course,particularly optimistic scenarios.
4 D ISCUSSION
The joint confidence intervals of the parameter pairs are shown in20 panels in Figs 4 and 5. Fig. 4 shows sections where the plot-ted parameters promise a reliable reconstruction. The best resultsare given for the size of the moon, which is closely linked to theamplitude of the residuals in the RM curve, after subtracting thebest-fitting planet. The radius is well reproduced in all sections anddid not suffer serious degenerations. The topmost row suggests thatthe size is little biased and the inclination of the moon is essen-tially unknown. This is because the residuals of the planet fittingare forced to be close to zero; consequently, the size of the moon isslightly underestimated. For this smaller moon, a lower inclinationparameter is preferred.
The ascending node of the orbit is somewhat correlated with theradius. Interestingly, once other parameters are well constrained, �
can be determined very accurately as Fig. 4 shows (see the right-hand panel in the second row). The third and fifth rows of Fig. 4demonstrate that there is no information on the mass of the satellitefrom the analysis of RV; all probed masses are equally probable.The most important conclusion is that the mass of the satellite mustbe omitted from the analysis, i.e. a fixed value for the mass or afixed assumption on the density of the satellite will lead to equally
C© 2010 The Authors. Journal compilation C© 2010 RAS, MNRAS 406, 2038–2046

Methods for exomoon characterization 2043
Figure 4. Joint confidence intervals of the moon parameters around the exact solution. The differences between the left-hand and the right-hand columnsdemonstrate how the parameter reconstruction improves when using moon transit photometry, i.e. the central transit time of the moon is known (plots in theright-hand columns). Different colours show fittings with different S/Ns (inner dark surface, red online: S/N = 5; grey surface, green online: S/N = 2; outerdark surface: S/N = 1), while the large open circles represent the input parameters of the simulated observations. See Table 1 for the meaning of the parameters.
reliable solutions in the other parameters with a much faster process.The abscissas of the fourth and fifth panels in Fig. 4 show the orbitalperiod of the moon. Surprisingly, there is some information in thelight curve for this period, as values between 2 and 10 d are preferred(the model moon has a 5-d period). Because of the little positionchange of the moon during the transit, the residual RM effect dueto the moon will last a somewhat shorter or longer time than that ofthe planet, which may be detected.
Fig. 5 shows further sections where degenerations are prominent.The joint confidence intervals evidently show that the angle param-eters, ι, φ and �, are seriously inter-related. Acceptable solutionscan be characterized with very different values of � or φ, becausethe orbital period of the moon is unknown (see the second and thirdrows). The fourth row shows that ι data do not constrain φ well.We suggest that a reliable value for ι will have to be assumed inpractical applications, and the other two angle parameters should
C© 2010 The Authors. Journal compilation C© 2010 RAS, MNRAS 406, 2038–2046

2044 A. E. Simon et al.
Figure 5. The continuation of Fig. 4. Here φ means the orbital phase of the moon around the planet.
be taken out of fitting (they can be either marginalized or evaluatedalong some prior with Bayesian analysis).
However, these limitations of parameter determination do notlessen dramatically the power of RV analysis in the exploration ofexomoons. This method nicely completes the evaluation of pho-tometry, since the mass can be determined from (barycentric) TTV.Simon et al. (2007) showed that from TTVp we get some infor-mation on the radius of the satellite, but this is correlated with thedensity of the moon. The analysis of RM effects gives prior infor-mation on the size of the moon, and the combination of all methods,
theoretically, may lead to the direct experimental determination ofthe density of the exomoons.
In Fig. 6, we show the posterior probability distributions of P andR, marginalized from the likelihood data by assuming uniform priorsto all variables. The reconstruction of R is satisfactory, although theradius is somewhat biased towards smaller sizes. There is someinformation for the period, too, which is somewhat surprising as theorbital period of the moon is ≈1/12 transit duration. The increasingnoise level does not bias the mode of the distributions, but gives thewings slightly more weight.
C© 2010 The Authors. Journal compilation C© 2010 RAS, MNRAS 406, 2038–2046

Methods for exomoon characterization 2045
Figure 6. Posterior probability distributions of R and P, marginalized fromthe fit likelihoods in the P—R subspace with uniform priors. The three differ-ent distributions refer to S/N levels of 1, 2 and 5 with the same colour codingas in Figs 3–5. The arrow shows the input value of the moon parameters.
4.1 The general case of main-sequence dwarf stars
We have shown the reconstruction of parameters for a 0.8-M�main-sequence star, which has a spectral type of K0 in the caseof solar metallicity. It is very important to note that our resultsare general and indicative for other types of stars. Although thesignal will be smaller for bigger stars, the shapes of the curvesdo not change significantly; hence, error propagation will followthe same scenario as presented in Figs 4 and 5. Consequently, thegeneral behaviour of the parameters concerning their stability anddegenerations will be the same. For a general case, we propose thatthe moon’s radius is the best parameter for reconstruction; in somecases, the orbital period might be also constrained.
Earlier type stars have larger radius; hence, the area eclipsed bythe moon is a smaller fraction of the projected stellar disc. The otherparameter that determines the ARM half-amplitude of the RM effectis the vrot sin i rotation velocity of the star, such that
ARM ∝(
R
R∗
)2
vrot sin i, (4)
where R denotes the radius of the moon, R∗ is the stellar radius andwe can assume that sin i ≈ 1 for those systems that display transitsand RM effect. Equality is true in equation (4) if we neglect limbdarkening. Limb darkening can reduce the amplitude of the RMeffect by 20–40 per cent, depending on the exact intensity profileof the stellar disc. We can combine the RM effect of a moon and a
planet together:
ARM,m+p ∝ R2p + R2
R2∗vrot. (5)
Now an upper estimate can be given for the size of the moon if it isnot detected in the residuals of the RM curve. In this case, the RMeffect of the moon is hidden in the scatter of the RV data, i.e. 3σvrad
is larger than the satellite’s effect:
3σvrad > ARM = R2
R2∗vrot. (6)
Rearranging this for the size of the moon, the upper limit is givenas R <
√3σvrad/vrotR∗, or simply substituting the amplitude of
the measured RM effect (and assuming ARM,m+p ≈ ARM,planet =R2
p/R2∗vrot),
R <
√3σvrad
ARM,planetRp. (7)
The confidence of this estimate is 99.9 per cent, i.e. 3σ confi-dence.
Which spectral types represent the best candidates for a success-ful detection of exomoons with the RM effect? To answer this ques-tion, we performed simple calculations for stars in the Pleiades opencluster, assuming that every star has a planet with a Ganymede-sizedmoon in central transit. Our intention was to predict the amplitudeof the satellite’s RM effect (assumed to be independent of that ofthe planet), as a function of stellar mass.
The B − V colours and v sin i data for Pleiades stars were takenfrom Queloz et al. (1998). Stellar masses and radii were estimatedfrom the B − V colour, using the latest Padova isochrones (Bertelliet al. 2008), adopting 70 Myr for the age and Z = 0.017 for themetallicity (Boesgaard & Friel 1990). We calculated the amplitudeof the RM effect according to equation (4), inserting the stellarradius and rotation velocity for each star and substituting the sizeof Ganymede. The results are plotted in Fig. 7 with open circles.
Although there are hints of a tendency, the scatter is large, whichcan be explained by the different spin axis orientations and differentrotation evolution for each star. The shape of the distribution in Fig. 7can be better seen using a statistical relationship for the rotation
5
10
20
50
100
0.2 0.4 0.6 0.8 1 1.2
M5 M2 M0 K5 K0 G5 G0 F7
RM
effect (c
m/s
)
M/M0
vosc
Rotation model + isochrone
Pleiades stars
age=70Myr
Z=0.017
Figure 7. Half-amplitude of the RM effect due to Ganymede-sized moonsof planets orbiting G, K and M dwarfs. Solid line: empirical model based onthe Barnes (2007) rotation model and isochrones. Open circles: individualstars of the Pleiades. The dashed curve shows the amplitude of solar-likeoscillations.
C© 2010 The Authors. Journal compilation C© 2010 RAS, MNRAS 406, 2038–2046

2046 A. E. Simon et al.
period of main-sequence stars determined by Barnes (2007): Prot ∝(B −V − 0.4)0.601t0.52 d, where t is the age of the star. This formulais singular at B − V = 0.4; thus, it is valid for stars later than F5,approximately. Similar to the individual stars, the B −V colours ofthe isochrone points have been converted to masses and radii. Therotation velocity has then been calculated as vrot = 2πR∗/P (wekept assuming sin i ≈ 1). To estimate RM amplitudes, we againused equation (4) and the size of Ganymede. In Fig. 7, the solid lineshows the resulting average RM amplitude. We conclude that starsbelow 0.6–0.8M� offer the best opportunity to detect the RM effectof the exomoons. Stars with masses greater than 1.2M� also showlarger effect; however, stellar variability quickly becomes dominantwith the increasing mass.
This variability has two dominant components: the jitter due toconvective motions (including the convectively excited solar-likeoscillations) and the rotational modulation due to stellar activity.Among the brighter dwarf stars, old, inactive G and K dwarfs offerthe best performance: a few stars are known to have <1 m s−1 jitter,while they typically have jitter levels in the 1–5 m s−1 regime (Saaret al. 2003; Wright 2005; O’Toole et al. 2008). On the contrary,some F-type stars display large jitter that even challenges astero-seismology (see the example of Procyon in Arentoft et al. 2008)and the detection of long-period planets (Lagrange et al. 2009). Thejitter from solar-like oscillations can be estimated via the scaling re-lation of the velocity amplitude, which depends on the light-to-massratio (L/M) of the star:
vosc = L/L�M/M�
(23.4 ± 1.4) cm s−1 (8)
(Kjeldsen & Bedding 1995). The predicted oscillation velocity am-plitudes are also plotted in Fig. 7 with the dashed line (blue incolour). Since M-dwarf stars have a very small L/M ratio, and con-sequently the amplitude of solar-like oscillations is tiny, they arepromising candidates to be quested for exomoons. These stars arefaint in the visual, but recent work of Bean et al. (2009), for exam-ple, has opened the door to the sub-m s−1 velocimetric accuracy inthe infrared with CRIRES on the Very Large Telescope.
It is worth noting that late M-dwarfs (beyond M4) exhibit largerrotation velocities (Jenkins et al. 2009), which make them difficulttargets for high-precision RV measurements because rapid rotationwashes out the spectral features (Bouchy, Pepe & Queloz 2001).Hence, the best targets for exomoon exploration are the K and earlyM-dwarf stars, for which both rotation and activity reach a minimumlevel (Jenkins et al. 2009; Wright 2005).
In the case of higher stellar activity, the situation is not entirelyhopeless, as illustrated by a recent study by Queloz et al. (2009),who filtered out activity with a Fourier polynomial using the firstrotation harmonics. This way they pushed the residuals from ±20to ±5 m s−1. Similar residual levels in fitting the RM effect werereached by Triaud et al. (2009).
It is known that the frequency of giant planets increases linearlywith the parent-star mass for stars between 0.4 and 3 M� (Ida &Lin 2005; Kennedy & Kenyon 2008), with e.g. 6 per cent frequencyof giant planets around 1M� and 10 per cent frequency around1.5 M�. However, we know planets around red dwarfs and thereis observational indication for a few multiple planetary systemsamong them (e.g. Rivera et al. 2005). The possible detection ofexomoons around planets of larger stars, if these satellites everexist, is a significant challenge for signal processing to minimizethe ambiguity caused by the higher level of velocity jitter.
A more elaborated distinction between signals of exoplanets andsignals from stellar physics requires a deep analysis that is beyond
the scope of this paper. There is reason for some optimism becausethe time-scales of the exoplanet–exomoon systems and those of thestellar signals are usually very different. Moreover, rapid develop-ment in instrumentation may reach levels of precision that wereunimaginable even a few years ago.
AC K N OW L E D G M E N T S
This work has been supported by the ‘Lendulet’ Young ResearchersProgram, the Bolyai Janos Research Fellowship of the HungarianAcademy of Sciences and the Hungarian OTKA Grants K76816and K68626.
REFERENCES
Agol E., Steffen J., Sari R., Clarkson W., 2005, MNRAS, 359, 567Arentoft T. et al., 2008, ApJ, 687, 1180Asimov I., 1979, Extraterrestrial Civilizations. Crown Publishers, New YorkBarnes S. A., 2007, ApJ, 669, 1167Bean J. L., Seifahrt A., Hartman H., Nilsson H., Reiners A., Dreizler S.,
Henry T. J., Wiedemann G., 2009, ApJ, submitted (arXiv:0911.3148)Bertelli G., Girardi L., Marigo P., Nasi E., 2008, A&A, 484, 815Boesgaard A. N., Friel E. D., 1990, ApJ, 351, 467Bouchy F., Pepe F., Queloz D., 2001, A&A, 374, 733Claret A., 2000, A&A, 363, 1081Dıaz R. F., Rojo P., Melita M., Hoyer S., Minniti D., Mauas P. J. D., Ruız
M. T., 2008, ApJ, 682, 49Gaudi B. S., Winn J. N., 2007, ApJ, 655, 550Gilliland R. L. et al., 2010, ApJ, 713, L160Girardi L., Bertelli G., Bressan A., Chiosi C., Groenewegen M. A. T., Marigo
P., Salasnich B., Weiss A., 2002, A&A, 391, 195Ida S., Lin D. N. C., 2005, ApJ, 626, 1045Jenkins J. S., Ramsey L. W., Jones H. R. A., Pavlenko Y., Gallardo J., Barnes
J. R., Pinfield D. J., 2009, ApJ, 704, 975Kennedy G. M., Kenyon S. J., 2008, ApJ, 673, 502Kipping D. M., 2008, MNRAS, 389, 1383Kipping D. M., 2009, MNRAS, 396, 1797Kipping D. M., Fossey S. J., Campanella G., 2009, MNRAS, 400, 398Kjeldsen H., Bedding T. R., 1995, A&A, 293, 87Lagrange A.-M., Desort M., Galland F., Udry S., Mayor M., 2009, A&A,
495, 335Lewis K. M., Sackett P. D., Mardling R. A., 2008, ApJ, 685, L153Li C.-H. et al., 2008, Nat, 452, 610Liebig C., Wambsganss J., 2009, A&A, submitted (arXiv:0912.2076)O’Toole S. J., Tinney C. G., Jones H. R. A., 2008, MNRAS, 386, 516Pal A., Kocsis B., 2008, MNRAS, 389, 191Queloz D., Allain S., Mermilliod J.-C., Bouvier J., Major M., 1998, A&A,
335, 183Queloz D. et al., 2009, A&A, 506, 303Rivera E. J. et al., 2005, ApJ, 634, 625Saar S. H., Hatzes A., Cochran W., Paulson D., 2003, in Brown A., Harper
G. M., Ayres T. R., eds, 12th Cambridge Workshop on Cool Stars, TheFuture of Cool-Star Astrophysics. Univ. Colorado Press, Boulder, CO,p. 694
Sartoretti P., Schneider J., 1999, A&AS, 134, 553Simon A. E., Szatmary K., Szabo Gy. M., 2007, A&A, 470, 727Simon A. E., Szabo Gy. M., Szatmary K., 2009, Earth, Moon and Planets,
105, 385Szabo Gy. M., Szatmary K., Diveki Z., Simon A., 2006, A&A, 450, 395Triaud A. H. M. J. et al., 2009, A&A, 506, 377Wagner N., 1936, Unveiling the Universe. The Research Publishers,
Scranton, PAWright J. T., 2005, PASP, 117, 657
This paper has been typeset from a TEX/LATEX file prepared by the author.
C© 2010 The Authors. Journal compilation C© 2010 RAS, MNRAS 406, 2038–2046




![Long Question: T-13 Exomoon - · PDF filemoon barycentre • TDV Planet velocity around planet-moon barycentre T-13, Exomoon [Credit: BBC] Page 4 Motivation • is moon phase • when](https://img.pdfslide.us/doc/110x75/5a8145997f8b9a38478d1de0/long-question-t-13-exomoon-barycentre-tdv-planet-velocity-around-planet-moon.jpg)