-
Accepted Manuscript
Metapopulation oscillations from satiation of predators
M.N. Kuperman, M.F. Laguna, G. Abramson, A. Monjeau, J.L.
Lanata
PII: S0378-4371(19)30761-7DOI:
https://doi.org/10.1016/j.physa.2019.121288Article number:
121288Reference: PHYSA 121288
To appear in: Physica A
Received date : 18 December 2018Revised date : 16 April 2019
Please cite this article as: M.N. Kuperman, M.F. Laguna, G.
Abramson et al., Metapopulationoscillations from satiation of
predators, Physica A
(2019),https://doi.org/10.1016/j.physa.2019.121288
This is a PDF file of an unedited manuscript that has been
accepted for publication. As a service toour customers we are
providing this early version of the manuscript. The manuscript will
undergocopyediting, typesetting, and review of the resulting proof
before it is published in its final form.Please note that during
the production process errors may be discovered which could affect
thecontent, and all legal disclaimers that apply to the journal
pertain.
https://doi.org/10.1016/j.physa.2019.121288
-
Highlights:
• A metapopulation model of extinction and coexistence in a
three species generic predator-prey ecosystem composed of two
herbivores in asymmetrical competition and a common predator is
presented.
• Satiety of the predator is incorporated as an asymptotic
saturation of the predation term.
• Regions of coexistence of the three species with persistent
oscillations, both as a transient phenomenon and as persistent
oscillations of constant amplitude, are found.
• The phenomenon is not present for the more idealized linear
predation model, suggesting that it can be the source of real
ecosystems oscillations.
*Highlights (for review)
-
Metapopulation oscillations from satiation of predators
M. N. Kupermana,b,c, M. F. Lagunaa,b, G. Abramsona,b,c, A.
Monjeaua,d, J. L. Lanatae
aConsejo Nacional de Investigaciones Científicas y
TécnicasbCentro Atómico Bariloche (CNEA), R8402AGP Bariloche,
Argentina
cInstituto Balseiro, Universidad Nacional de Cuyo,
ArgentinadFundación Bariloche, R8402AGP Bariloche, Argentina
eInstituto de Investigaciones en Diversidad Cultural y Procesos
de Cambio, CONICET-UNRN,R8400AHL Bariloche, Argentina
Abstract
We develop a mathematical model of extinction and coexistence in
a generic predator-prey ecosystem composed of two herbivores in
asymmetrical competition and a predatorof both. With the aim of
representing the satiety of predators when preys are over-abundant,
we introduce for the predation behavior a dependence on prey
abundance.Specifically, predation is modeled as growing
proportionally to the presence of herbivoresat low densities, and
saturating when the total metapopulation of prey is
sufficientlylarge. The model predicts the existence of different
regimes depending on the parame-ters considered: survival of a
single species, coexistence of two species and extinction ofthe
third one, and coexistence of the three species. But more
interestingly, in some re-gions of parameters space the solutions
oscillate in time, both as a transient phenomenonand as persistent
oscillations of constant amplitude. The phenomenon is not present
forthe more idealized linear predation model, suggesting that it
can be the source of realecosystems oscillations.
Key words: hierarchical competition, predation, bifurcation
analysis, ecological cycles
1. Introduction
The use of mathematical models in biology in general and in
ecology in particular hasgrown significantly in the last decade.
This is due in part to their predictive capacity,but also due to
their power to order and systematize assumptions and thus
contributeto elucidate the behavior of complex biological systems.
In fact, the interrelation offactors as diverse as climate, access
to resources, predators and human activity, makesit necessary to
develop mathematical models that allow predicting the effect of
each ofthem on the species involved, showing possible scenarios of
coexistence or extinction inspatially structured populations or
metapopulations. A large number of publications ontopics such as
predator-prey models [1, 2, 3], intra- and inter-specific
competition [4, 5, 6],
Email addresses: [email protected] (M. N. Kuperman),
[email protected] (M.F. Laguna), [email protected] (G.
Abramson), [email protected] (A.Monjeau),
[email protected] (J. L. Lanata)Preprint submitted to
Ecological modelling April 16, 2019
*ManuscriptClick here to view linked References
-
or habitat fragmentation [7, 8, 9] can be found, but more
research is still needed on howto integrate all these mechanisms
together.
In previous works we developed a metapopulation model of
extinction and coexis-tence in a generic predator (or hunter)-prey
ecosystem. In order to characterize thegeneral behaviors we focused
on a trophic network of three species: two herbivores andone
predator [10, 11], forming the so-called diamond module [12, 13]
frequently foundin complex trophic webs, under the assumption of
asymmetric (hierarchical) competi-tion between the herbivores. This
problem was studied by means of ordinary differentialequations and
stochastic simulations. Both approaches provided similar and
interestingresults. The model predicts the existence of different
regimes depending on the param-eters considered: survival of one
species, coexistence of two and extinction of the third(in the
three possible combinations), and coexistence of the three species
involved [10].Moreover, the results presented in [11] indicate that
the superior competitor of the hier-archy is driven to extinction
after the introduction of hunters in the model. This happenseven in
pristine habitats (with no environmental degradation) and, more
relevantly, evenif the predatory pressure is higher on the inferior
herbivore.
In the original model we proposed that predation grew
proportionally to the fractionof space occupied by herbivores.
While this approach is valid for ecosystems with lowabundance of
preys, it introduces an unrealistic behavior of the predator
population whenthe fraction of available prey patches is high. The
model implicitly assumes that thepredator or hunter never quenches,
even when there is an overabundance of prey. In thepresent work,
and in search of a better representation of predation, we analyze a
variationof this model. Satiety of the predator or hunter is
incorporated in the mathematicaldescription as an asymptotic
saturation of the predation. The rationale behind suchnonlinearity
is that predation pressure is effectively reduced when there exists
otherprey-occupied patches around. It is also a proxy of the fact
that, usually, predators’range is larger than preys’, encompassing
perhaps several patches of the latter.
The analysis of this model shows new results. The most
interesting aspect of thesolutions is the temporal oscillation of
the populations. Under certain conditions theseoscillations are
transient and decay to a stable equilibrium, but in other
situations oscil-lations are maintained indefinitely. In fact, we
found regions of coexistence of the threespecies with persistent
oscillations of constant amplitude. These dynamic regimes enrichthe
predictive properties of the model, so we expect our results to
drive the search forevidence of oscillations in populations of
current and extinct species.
In the Section 2 we introduce the mathematical model. Section 3
is devoted to results,whereas in Section 4 we discuss the main
implications of the results and possible futuredirections.
2. Model with saturation in predation
Our dynamical model requires a set of rules determining the
temporal evolution ofthe system. These rules are inspired by the
life history and the ecological interactions ofthe species
involved, corresponding to biotic, environmental and anthropic
factors [10].In order to gain insight into the possible outcomes of
different scenarios of interest, wehave intentionally kept our
system relatively simple: two herbivores in a
hierarchicalcompetition for a common resource and a third species
exerting a predatory pressure onboth. Some details of the
ecological implications are discussed below.
2
-
The original model, proposed in [10], can be described by the
following set of equa-tions:
dx1dt
= c1x1(1− x1)− e1x1 − µ1x1y, (1a)dx2dt
= c2x2(1− x1 − x2)− e2x2 − µ2x2y, (1b)dy
dt= cyy(x1 + x2 − x1x2 − y)− eyy. (1c)
Each species is described by a dynamical variable representing
the fraction of occupiedpatches in the system: x1 and x2 are the
herbivores, and y is the predator. Equations (1)give the time
evolution of these variables in a mean field description of the
metapopula-tion. The interpretation of these equations in the
context of the metapopulation dynamicsdeserves some
explanation.
We imagine that both herbivores feed on the same resource and
therefore competewith each other. This is represented by the first
terms of Eqs. (1a-1b), which are thecolonization terms of the
herbivores. As mentioned, we assume that such competitionis
asymmetrical, as it happens in most natural situations. This has
interesting conse-quences, since coexistence under these
circumstances requires advantages and disadvan-tages of one over
the other. Consider, for example, that the individuals of each
species areof different size, or temperament, such that species x1
can colonize any available patch ofhabitat (the term (1−x1)), and
even displace x2, while species x2 can only occupy sitesthat are
not already occupied by x1 (the term (1−x1−x2)). In this regard, we
call x1 thesuperior or dominant species of the hierarchy, and x2
the inferior one. This asymmetryis reflected in the logistic terms
describing the competition in Eqs. (1a) and (1b), as x1limits the
growth of x2 in Eq. (1b), while the reciprocal is not true.1 In
other words, wehave intra-specific competition in both species, but
only x2 suffers from the competitionwith the other species, x1. In
this context, for x2 to survive requires that they have
someadvantage other than size, typically associated with a higher
reproductive rate or a lowerneed of resources.
Besides these colonization terms, the equations for the
herbivores also include localextinction or yielding terms with
coefficient ei and a predation term with coefficient µiand
proportional to both xi and y, as usual. The equation for the
predator y is alsologistic, with a few differences. Observe that
the colonization of the predator is limitedto patches where prey is
present, and which are not already occupied by predators. Thisis
provided by the factor (x1+x2−x1x2−y), where the product −x1x2
takes into accountthe patches with double occupancy by both
preys.
Now we analyze a variation of this model, seeking a more
realistic representationof predation (or hunting). In the mean
field spirit, we consider that the existence ofother patches
occupied by prey reduces the predation pressure on any of them,
makingthe corresponding term nonlinear on xi. We propose a function
that starts linear atsmall prey occupation fractions and saturates,
analog to the satiation effect sometimesincorporated in realistic
predator-prey models [14]. The differential equations in the
1This mechanism can be considered as a weak competitive
displacement. A stronger version couldadditionally incorporate a
term −c1x1x2 in Eq. (1b) (as in [11]).
3
-
model with saturation become:
dx1dt
= c1x1(1− x1)− e1x1 −µ1x1y
x1 + x2 + d1, (2a)
dx2dt
= c2x2(1− x1 − x2)− e2x2 −µ2x2y
x1 + x2 + d2, (2b)
dy
dt= cyy(x1 + x2 − x1x2 − y)− eyy. (2c)
Observe that, while the predation terms undermine the population
of herbivores,predation does not grow proportionally to the
presence of prey, but rather saturatesif the combined prey
metapopulation is sufficiently large. Note two new parameters,d1
and d2, representing the departure from proportionality. While µi
establishes thesaturation level of the predation term, di governs
the speed at which this level is reachedas a function of the
abundance of the preys. The rationale for this specific choice of
thesatiation term (discussed, for example, in [22, 14, 24]) is
presented in the Appendix.
The model defined by Eqs. (1) constitutes a rather standard mean
field metapopula-tion model for the diamond module of trophic
networks; in the next section we presentthe richer dynamics of the
model described by Eqs. (2).
3. Results
While the model described by Eqs. (1) predicts several different
regimes, with threeand two species coexistence, the steady state
solutions are always stable nodes or foci.Here we show that the
saturation effect induces a richer phase space, in particular
withsustained oscillatory dynamics.
Without loss of generality we have restricted the values of the
parameters within arange that shows all the behaviors displayed by
the model, especially those scenariosof coexistence between two or
all three species. The parameters are chosen in such away that in
the absence of predators a coexistence of the two herbivores is
achieved.Moreover, the predation pressure over x1 is kept fixed at
a value µ1 < µ2, correspondingto situations where the inferior
species is captured more frequently than the superiorone.
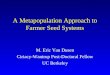
We plot in Fig. 1 the temporal evolution of the population
densities for differentvalues of µ2, the predation pressure over
the inferior herbivore, x2. The first panel(Fig. 1a) shows the
behavior of the populations when a relatively low predation
pressureis exerted on x2, µ2=0.33. In this case we observe damped
oscillations, which converge tothe extinction of the superior
herbivore x1 and to the coexistence of the other two species,the
predator y and the inferior herbivore x2. A higher value of µ2 =
0.40 is not enough toallow the survival of x1 but produces
sustained oscillations of y and x2 (see Fig. 1b). Aneven higher
pressure on x2 (µ2=0.50) and the equilibrium between herbivores is
achieved,and the three species coexist. This is shown in Fig. 1c,
with persistent oscillations ofconstant amplitude. If we increase
further the predation pressure on x2, the oscillationsdisappear.
Still, the coexistence of the three species is possible, as shown
in Fig. 1d. Asexpected, a larger predation pressure on the inferior
herbivore will finally produce itsextinction, as seen in Fig. 1e.
As mentioned before, these non-oscillating behaviors werealso
observed in our previous model, Eqs. (1).
4
-
0 800 16000.0
0.2
0.4
0 1000 20000.0
0.2
0.4
0 1000 20000.0
0.2
0.4
0 800 16000.0
0.2
0.4
0 400 8000.0
0.2
0.4
b
fractio
n x1 x2 y
a
fractio
n
ed
c
fraction
t
t
Figure 1: Temporal evolution of each species’ fraction of
occupied patches for different predations pres-sures over x2 (a)
µ2=0.33, (b) µ2=0.40, (c) µ2=0.50, (d) µ2=0.60, (e) µ2=0.67. Other
parametersremain fixed: c1=0.14, c2=0.2, cy=0.4, e1=0.1, e2=0.015,
ey=0.01, corresponding to coexistence inthe absence of predators
pressure, and d1=0.22, d2=0.14, µ1=0.15 < µ2, indicating a
higher predationpressure on x2. Arbitrary initial conditions are
used to show the transient regime; all initial conditionsare drawn
to the same attractors.
In order to provide a visual representation of the steady state
behavior of both sys-tems, Eqs. (1) and (2), we show in Fig. 2 the
stable equilibria and limit cycles correspond-ing for the solutions
of both models, for a range of µ2 and the same choice of the
valuesof the rest of the parameters as in Fig. 1. On the one hand
the asymptotic solutionscorresponding to the model described by
Eqs. (1), without saturation in the predation,converge to stable
equilibria, showing three species coexistence for all the values of
µ2displayed. These are the set of solutions indicated as A on Fig.
2.
On the other hand, the steady state solutions of Eqs. (2) show
both stable equilibriaand cycles. These are indicated as B on Fig.
2. The dynamics of the cycles is ratherinteresting. For µ2 . 0.36
we have non-oscillatory solutions, with equilibria located onthe
vertical (x2, y) plane that appear as an oblique line of dots in
Fig. 2 on the left of theplot. In this regime the dominant
herbivore, despite of being less predated on than theinferior one,
can not persist. At µ2 ≈ 0.36 there is a Hopf bifurcation and
cycles (still onthe vertical (x2, y) plane) appear. Then, at µ2 ≈
0.46 a new bifurcation occurs. This timeit is a transcritical
bifurcation of cycles, as will be shown later. The superior
herbivore
5
-
Figure 2: Asymptotic solutions for a range of values of µ2, with
A) corresponding to Eqs. (1) (nosaturation) and B) corresponding to
Eqs. (2) (predation saturation). All the remaining parameters
areequal to those of Fig. 1. Initial conditions and transients not
shown; the plotted steady states are globalattractors of the
dynamics.
can now coexist with the other two species and the cycle
detaches from the (x2, y) plane.We can observe in Fig. 2 how these
cycles twist in the three-dimensional phase space,displaying an
oscillatory coexistence of the three species. At µ2 ≈ 0.56 another
Hopfbifurcation occurs, this time destroying the cycle, preserving
the coexistence betweenthe three species, as shown by the three
rightmost points of Fig. 2B.
A bifurcation diagram of the phenomenon, using µ2 as a control
parameter, is shownin Fig. 3, where the five regimes of Fig. 1 are
indicated by the same letters, in verticalstripes in both panels.
The vertical lines correspond to the bifurcation values of µ2
foundby the linear stability analysis of Eqs. (2). The upper panel
displays the equilibria of thedynamics. Dashed lines indicate
linearly unstable equilibria, and in such circumstancessustained
oscillations occur. The amplitude of these oscillations is shown in
the bottompanel of Fig. 3.
We can observe more clearly that there is a region where species
x2 and the predatorcoexist (that is, with extinction of the
dominant herbivore), corresponding to values ofµ2 . 0.46. This
regime contains the Hopf bifurcation H1, associated to a limit
cycleresponsible for the two-species oscillations for µ2 &
0.36. When the predation pressureon the inferior herbivore is
increased above the transcritical bifurcation of cycles TCc
weobserve coexistence of the three species, first in an oscillating
regime and then, beyonda second Hopf bifurcation H2, in a
stationary equilibrium. The survival of the thirdspecies and the
oscillatory behavior of the three of them is the evidence of a
change ofdimensionality of the stable manifold produced by a
transcritical bifurcation of cycles.The three species survive until
the bifurcation marked as TC (a simple transcriticalbifucartion of
fixed points for the positive solution for the species x2). If the
predationis too high, it is x2 the extinct species, allowing for
the survival of the dominant species
6
-
0.0
0.1
0.2
0.3 0.4 0.5 0.6 0.70.0
0.1
0.2
0.3
H1 TCc H2 TC
extin
ctio
n of
x2
equi
libriu
m
extinction of x1
oscillations
3-coexistence
a b c d e
ampl
itude
2
x1 x2 y
Figure 3: Diagram of coexistence and extinction of the
metapopulations described by Eqs. (2), as afunction of the
parameter µ2. Vertical lines separate the five different regimes
observed, correspondingto the named panels of Fig. 1. Upper panel:
equilibrium values (dashed lines show unstable equilibria).Lower
panel: amplitude of the limit cycles. Also shown are the two Hopf
bifurcations, H1 and H2, thetranscritical bifurcation between two-
and three-species cycles, TCc, and the transcritical bifurcationof
x2, TC. All the remaining parameters are equal to those of Fig. 1.
This diagram was built by acombination of analytic solutions of of
Eqs. (2) (the equilibria of the top panel) and an automaticanalysis
of their numerical solutions (bottom panel), taking care that a
steady state has been reachedand that the result is independent of
initial conditions.
x1.Complementing the bifurcation analysis, we show in Fig. 4 the
real part of the eigen-
values of the linearized system at the unstable equilibria in
the region of cycles, aroundthe transcritical bifurcation of cycles
TCc. Thicker lines (of both colors) correspond tothe pair of
complex-conjugate eigenvalues of each cycle. Black lines correspond
to thetwo-species oscillation, which is stable for µ2 . 0.462. The
eigenvalue with negative realpart corresponds to the stable
manifold of the cycle, which is normal to the plane (x2, y).At the
transcritical bifurcation point TCc this eigenvalue exchanges
stability with thecorresponding one of the other cycle (thin red
line), the center manifold abandons theplane x1 = 0 and
three-species coexistence ensues.
7
-
0.35 0.40 0.45 0.50 0.55
-0.01
0.00
0.01
H1 H2
3-coexistenceextinction of x1
Re (
)
2
x1 0 x2 > 0 y > 0 x1 0 x2 > 0 y > 0
TCc
Figure 4: Real part of the eigenvalues corresponding to the
linear stability analysis of the equilibriaof Eqs. (2) within the
range of µ2 where oscillations are observed. Thick lines correspond
to complexconjugate eigenvalues. All the remaining parameters are
equal to those of Fig. 1.
4. Final remarks and conclusions
We have presented here the main results obtained with a simple
three-species metapop-ulation model, composed of a predator and two
herbivores in asymmetric competition,where the predation pressure
saturates if the fraction of habitat occupied by preys is
highenough. As shown, the model predicts the existence of different
regimes as the values ofthe parameters change. These regimes
consist of the survival of a single species (any ofthe herbivores),
the coexistence of two species and the extinction of the third one
(thethree combinations are possible) and also the coexistence of
the three species. But themost interesting aspect of the solutions
of this model is that it can display temporal os-cillations. Under
some conditions these oscillations are transient phenomena that
decayto a stable equilibrium. Yet in other situations the
oscillations are maintained indefi-nitely. In fact, we have found
regions of coexistence of the three species with
persistentoscillations of constant amplitude.
It was shown that, while in the original model without
saturation in the predationthe asymptotic solutions converge to
stable equilibria, the steady state solutions of themodel with
saturation show both stable equilibria and cycles. Our results
indicate that,for low predation pressures on the inferior
herbivore, the superior one extinguishes andnon-oscillatory
solutions appear for the remaining species, as indicated by the
solutionsobserved in Fig. 2. When this happens, the system becomes
essentially two-dimensional.At higher predation pressure a Hopf
bifurcation and cycles develop, but still the supe-rior herbivore
cannot survive. After that, for an even higher value of µ2, a
transcriticalbifurcation of cycles occurs to a state of
three-species coexistence. Bear in mind that thepersistence of the
inferior competitor requires that they have some advantage over
thedominant one (in this case, a greater colonization rate). In
such a context, the superiorcompetitor is the most fragile of both
with respect to predation (or to habitat destruc-tion, as shown for
example in [11]). For this reason an increase of the predation on
x2
8
-
releases competitive pressure, allowing x1 to survive. Finally,
at an even higher preda-tion pressure, another Hopf bifurcation
occurs which destroys the cycle. The coexistenceof the three
species is preserved until the pressure µ2 is high enough to
extinguish theinferior herbivore x2.
Transcritical bifurcations of cycles in the framework of
population models have beenfound in several systems described by
equations that include saturation [15, 16, 17, 18,
19].Three-species food chain models were extensively studied
through bifurcation analysis[15, 16, 17]. A rich set of dynamical
behaviors was found, including multiple domainsof attraction,
quasiperiodicity, and chaos. In Ref. [18] the dynamics of a
two-patchespredator-prey system is analyzed, showing that
synchronous and asynchronous dynamicsarise as a function of the
migration rates. In a previous work, the same author analyzesthe
influence of dispersal in a metapopulation model composed of three
species [19]. Ourcontribution, through the model presented here,
extends those results by consideringtogether several sensible
ingredients found in natural systems. First, our model hasthree
species in two trophic levels, with two of them in the commonly
found asymmetriccompetition and subject to predation. (Four species
in three levels, in the paradigm of thediamond module, but we
didn’t take into account any dynamics of the common resourceat the
lowest vertex of the diamond.) Second, spatial extension and
heterogeneity havebeen taken into account implicitly as mean field
metapopulations in the framework ofLevins’ model [5].
Of course, we have not exhausted here all the possibilities of
the model defined byEqs. (2), but it is an example of the most
interesting results that we have found. Onecan also imagine that
the cyclic solutions arise from the interplay of activation and
re-pression interactions, as in metabolic systems [20]. The same
pattern could be appliedto regulations in community ecology if we
replace the satiation inhibitor by the additionof a second
predator, superior competitor with respect to the other predator,
inhibitingits actions. This is a well documented pattern in several
ecosystems [21]. One couldalso adapt the model to be interpreted as
a population density model, by rewriting colo-nization and
extinction into reproduction and death rates, and with the density
of preyacting as a carrying capacity of the predator. In such a
case, we have observed thatthe structure of the phase space is
qualitatively as shown here. We believe that thesebehaviors are
very general and will provide a thorough analysis elsewhere. These
dynam-ical regimes considerably enrich the predictive properties of
the model. In particular, webelieve that the prediction of cyclic
behavior for a range of realistic predator-prey mod-els should
motorize the search for their evidence in populations of current
and extinctspecies.
Acknowledgments
The authors gratefully acknowledge grants from CONICET (PIP
2015-0296), AN-PCyT (PICT-2014-1558) and UNCUYO (06/506).
A. On the satiation of predators
Considering that any predator should have physiological
limitations to handle anunbound number of preys per unit time,
Holling [22] designed a series of experiments
9
-
that lead him to derive a predator functional response term now
called Holling’s TypeII. This term is hyperbolic and agrees with
some of the postulates proposed by Turchin[23] on his attempt to
base the foundations of population dynamics on a set of
“axioms.”Two of these postulates account for the hyperbolic
functional form. The first of themstates that at low resource
densities the consumption by a single consumer is proportionalto
the resource density. The second one establishes that an individual
consumer has alimiting intake capacity imposed by its physiology,
which holds no matter how high isthe resource density.
Let us consider a predator-prey system whose population
densities are representedby x(t) and y(t) respectively:
dx
dt= f(x)− yR(x), (3)
dy
dt= ayR(x)− by, (4)
where R(x) represents a nonlinear predation rate. The matter has
been discussed byRosenzwig and McArthur [24], and several
phenomenological forms of the predationterm are considered by
Murray [14] without much ellaboration, but the specific form ofType
II can be rationalized as follows.
Lets follow [25] and consider that, during a time τ , the
predator covers an area ssearching for preys. The predator cannot
spend the entire period τ eating: it needs timeto handle its catch,
digest it, etc. Consider that the necessary handling time per prey
ish. Then the searching time is reduced to τ − hN if N is the
number of preys effectivelycaught. Since the number of preys
present in s is sx, then the total number of preyscaught by the
predator is:
N(τ) = xs(τ − hN), (5)and
R(x) =N
τ=
xs
1 + hsx, (6)
that is of Holling’s Type II. The result can be immediately
generalized to more preyspecies, xi, where each one needs a
handling time hi, giving predation terms of the formused in Eqs.
(2). For each prey it holds:
Ni(τ) = xis(τ − h1N1 − h2N2), (7)
where i = 1, 2 and hi is the time involved in handling prey
species i Solving the pair ofequations given by (7) we obtain
Ri(x) =Niτ
=xis
1 + sh1x1 + sh2x2. (8)
In the present work we are considering a metapopulation model.
The considerationsmade here about individual predators can be
directly translated into limitations andsaturations of local
populations associated to each patch, since the existence of
otherpatches occupied by prey reduces the predation pressure on any
of them.
10
-
References
[1] Swihart RK, Feng Z, Slade NA, Mason DM, Gehring TM, Effects
of habitat destruction and resourcesupplementation in a
predator–prey metapopulation model, J. Theor. Biol. 210 (2001)
287-303.
[2] Bascompte J, Solé RV, Effects of habitat destruction in a
prey–predator metapopulation model, J.Theor. Biol. 195 (1998)
383-393.
[3] Kondoh M, High reproductive rates result in high predation
risks: a mechanism promoting thecoexistence of competing prey in
spatially structured populations, Am. Nat. 161 (2003) 299-309.
[4] Nee S, May RM, Dynamics of metapopulations: habitat
destruction and competitive coexistence, J.Anim. Ecol. 61 (1992)
37-40.
[5] Tilman D, May RM, Lehman CL, Nowak MA, Habitat destruction
and the extinction debt, Nature371 (1994) 65-66.
[6] Hanski I, Coexistence of competitors in patchy environment,
Ecology 64 (1983) 493–500.[7] Hanski I, Ovaskainen O, The
metapopulation capacity of a fragmented landscape, Nature 404
(2000)
755-758.[8] Hanski I, Ovaskainen O, Extinction debt at
extinction threshold, Conserv. Biol. 16 (2002) 666-673.[9]
Ovaskainen O, Sato K, Bascompte J, Hanski I, Metapopulation models
for extinction threshold in
spatially correlated landscapes, J. Theor. Biol. 215 (2002)
95-108.[10] Laguna MF, Abramson G, Kuperman MN, Lanata JL, Monjeau
JA,Mathematical model of livestock
and wildlife: Predation and competition under environmental
disturbances, Ecological Modeling309-310 (2015) 110-117.
[11] Abramson G, Laguna MF, Kuperman MN, Monjeau JA, Lanata JL,
On the roles of hunting andhabitat size on the extinction of
megafauna, Quaternary International 431B (2017) 205-215.
[12] McCann K and Gellner G, Food chains and food web modules,
in Encyclopedia of TheoreticalEcology, edited by Alan Hastings,
Louis Gross (University of California Press, 2012).
[13] Bascompte J and Melián CJ, Simple trophic modules for
complex food webs, Ecology 86 (2005)2868-2873.
[14] Murray J D, Mathematical Biology. I. An introduction, 3rd
Edition. Vol. 17 of InterdisciplinaryApplied Mathematics
(Springer-Verlag, NewYork, Berlin, Heidelberg, 2002).
[15] McCann K, Yodzis P, Bifurcation structure of a three
species food chain model, Theor. Pop. Biol.48 (1995) 93-125.
[16] Klebanoff A, Hastings A, Chaos in three species food
chains, J. Math. Biol. 32 (1994) 427-451.[17] Kuznetsov YA, Rinaldi
S, Remarks on Food Chain Dynamics, Math. Biosciences 134 (1996)
1-33.[18] Jansen VVA, The dynamics of two diffusively coupled
predator-prey populations, Theor. Pop. Biol.
59 (2001) 119-131.[19] Jansen VVA, Effects of dispersal in a
tri-trophic metapopulation model, J. Math. Biol. 34 (1994)
195-224.[20] Monod J and Jacob F, General conclusions:
Teleonomics mechanisms in cellular metabolism,
growth and differentiation, in Cold Spring Harbor Symposia on
Quantitative Biology 26 (1961)389-401.
[21] Terborgh J and Estes JA, Trophic cascades, predators, prey,
and the changing dynamics of nature(Island Press, Washington DC,
2010).
[22] Holling CS, Some characteristics of simple types of
predation and parasitism, The Canadian Ento-mologist 91 (1959)
385-398.
[23] Turchin P, Complex Population Dynamics (Princeton Univ.
Press, Princeton, NJ, 2003).[24] Rosenzweig M and MacArthur R,
Graphical representation and stability conditions of
predator-prey
interaction, American Naturalist 97 (1963) 209-223.[25] Smith HL
and Waltman P, The theory of the chemostat: dynamics of microbial
competition (Cam-
bridge University Press, Cambridge, 1995).
11