Embed Size (px)
Citation preview

Granular Matter manuscript No.(will be inserted by the editor)
Mesoscale contact models for sticky particles
A. Singh, V. Magnanimo and S.LudingMulti Scale Mechanics, CTW,MESA+, UTwente,P.O.Box 217, 7500 AE Enschede,Netherlands,e-mail: [email protected],[email protected],
Abstract The pairwise interaction between realistic visco-elasto-plastic and adhesive particles is the subject of this study.The final goal is to define a simple, flexible and useful interaction model that allows to describe the multi-contact bulkbehavior of assemblies of non-homogeneous/non-sphericalparticles e.g. with internal structures of the scale of their contactdeformation.We attempt to categorize previous approaches and propose a simplified mesoscale normal contact model that contains theessential ingredients to describe an ensemble of particles, while it is not aimed to include all details of every single contact.This model combines short-ranged non-contact forces with an elaborate, piece-wise linear elasto-plastic adhesive normalcontact force as well as other viscous/dissipative terms. Using energy conservation arguments, an expression for the coef-ficient of restitution is derived as a function of the impact velocity of the particles. Interestingly, we observe two stickingregimes, that result from the relative influence of the various forces acting in the model, one at very low and another at rel-atively higher impact velocity. The low velocity sticking is due to dominating non-contact adhesion, while the high velocitysticking induced by a combination of non-linear history dependent adhesion and plastic dissipation.The relevance of the model for various types of bulk materials is critically discussed with respect to features as: non-linearpressure dependent bulk stiffness, limit plasticity or non-perfect detachment under tension.Keywords: Meso-scale, Particle Contact Models, Adhesion,Elasto-Plastic Material, Core-Shell materials, Energydissipation

2
Nomenclature
mi : mass ofith particle.ai : Radius ofith particle.mr : Reduced mass of two particles.δ : Contact overlap between particles.k : Spring stiffness.vi : Relative velocity before collision.vf : Relative velocity after collision.vi
∞ : Relative velocity before collision at infinite separation.vf
∞ : Relative velocity after collision at infinite separation.vn : Normal component of relative velocity.e : Coefficient of restitution.εi : Pull-in coefficient of restitution.en : Normal coefficient of restitution.εo : Pull-off coefficient of restitution.k1 : Slope of loading plastic branch.k2 : Slope of unloading and reloading elastic branch.kp : Slope of unloading and reloading limit elastic branch.kc : Slope of irreversible, tensile adhesive branch.vp : Relative velocity before collision for which the limit case of overlap is reached.φ f : Dimensionless plasticity depth.
δmax : Maximum overlap between particles for a collision.δ p
max : Maximum overlap between particles for the limit case.δ0 : Force free overlap∼= plastic contact deformation.
δmin : Overlap between particles at the maximum negative attractive force.δc : Kinetic Energy free overlap between particles.
Wdiss : Amount of energy dissipated during collision.η : Dimensionless plasticity of the contact.β : Adhesivity: dimensionless adhesive strength of the contact.χ : Scaled initial velocity relative tovp.fa : Non-contact adhesive force at zero overlap.δa : Non-contact separation between particles at which attractive force becomes active.kc
a : Strength of non-contact adhesive force.

3
1 Introduction
Flows of granular materials are ubiquitous in industry andnature. For this reason, the past decade has witnessed a stronginterest in better understanding of their behavior. Especially,the impact of fine particles with particles/surfaces is a funda-mental problem. The interaction force between two particlesis a combination of elasto-plastic deformation, viscous dis-sipation, and adhesion – due to both contact and long-rangenon-contact forces. Pair interactions that can be used in bulksimulations with many contacts per particle are the focus,and we use the singular special case of pair interaction tounderstand them.
Different regimes are observed for two colliding parti-cles: For example a particle can either stick to another parti-cle/surface or it rebounds, depending upon the relative strengthof adhesion and impact velocity, size and material parame-ters. This problem needs to be studied in detail, as it formsthe base for understanding more complex, many-particle flowsin realistic systems, related to e.g. astrophysics (dust ag-glomeration, Saturn’s rings, planet formation) or industrialprocesses (handling of fine powders, granulation, filling anddischarging of silos). Particularly interesting is the interac-tion mechanism for adhesive materials like, e.g. asphalt, iceparticles or clusters/agglomerates of fine powders (often madeof even smaller primary particles). Some materials can bephysically visualized as having a plastic outer shell with arather stiff, elastic inner core. Moreover, the analysis can beapplied to particle-surface collisions in kinetic spraying, inwhich the solid micro-sized powder is accelerated towards asubstrate. In cold spray, bonding occurs when impact veloc-ities of particles exceed a critical value, that depends on var-ious material parameters [41, 43, 62] but for even larger ve-locities particles rebound [60, 61]. Due to the inhomogene-ity of most realistic materials, their non-sphericity, andtheirsurface irregularity, the goal is not to include all the possi-ble details – but rather to catch the essential phenomena andingredients, finding a compromise between simplicity andrealistic contact mechanics.
1.1 Contact Models Review
Computer simulations have turned out to be a powerful toolto investigate the physics of particulate systems, especiallyvaluable as there is no generally accepted theory of granularflows so far, and experimental difficulties are considerable.A very popular simulation scheme is an adaptation of theclassical Molecular Dynamics technique called Discrete El-ement Method (DEM) (for details see Refs. [2, 7, 15, 21, 24,25,46,50,56]). It consists of integrating Newton’s equationsof motion for a system of “soft”, deformable grains, startingfrom a given initial configuration. DEM can be successfully
applied to adhesive particles, if a proper force-overlap model(contact model) is given.
Brilliantov et al. [4] investigated the collision of adhe-sive viscoelastic spheres and presented a general analyticalexpression for their collision dynamics, but we rather turnto plastic contact deformations in the following. The JKRmodel [19] is a widely accepted adhesion model for elasticspheres and gives an expression for the normal force. Later,Derjaguin et al. [11] considered that the attractive forcesactonly just inside and outside the contact zone, where sur-face separation is small. One interesting model for dry ad-hesive particles was proposed by Molerus [30, 31], whichexplained consolidation and non-rapid flow of adhesive par-ticles in terms of adhesion forces at particle contacts. Thorn-ton and Yin [49] compared the results of elastic sphereswith and without adhesion and Thornton, later on in Ref.[48], extended this work to adhesive elasto-plastic spheres.Molerus’s model was further developed by Tomas, who in-troduced a contact model [51–53] that couples elasto-plasticcontact behavior with non-linear adhesion and hysteresis,which involves dissipation and a history (compression) de-pendent adhesive force. The contact model subsequently pro-posed by Luding [25, 28, 29] works in the same spirit asthe one of Tomas [52], only reducing complexity by us-ing piece-wise linear branches in an otherwise still highlynon-linear contact model. Note that in the reference work[25], the short ranged non-contact force beyond contact wasnot specified as in the present study. Complex details like apossible non-linear Hertzian law for small deformation, andnon-linear load-unload hysteresis are over-simplified in themodel as compared to Tomas [52]. This is partly due to thelack of experimental reference data or theories, but also tokeep the model as simple as possible. The model containsthe basic mechanisms, elasticity, plasticity and adhesionasrelevant for fine, dry powders and shell-core materials. Apossible connection between the microscopic contact modeland the macroscopic, continuum description for adhesiveparticles was recently proposed by Luding and Alonso-Marroquin[26].
When two particles collide, the behavior is intermedi-ate between the extremes of perfectly elastic and fully in-elastic, possibly fragmenting collisions. The elasticityof thecollision can be best described by the coefficient of restitu-tion, which is the ratio of magnitude of post-collision andpre-collision normal relative velocities of the particles. Itquantifies the amount of energy not dissipated during thecollision. For the case of plastic and viscoelastic collisions,it was suggested that dissipation should be dependent onimpact velocity [18, 20], as can be realized by viscoelasticforces [6, 20, 23, 27] and follows from plastic deformationstoo [64]. An early experimental study on micrometer adhe-sive polystyrene latex spheres was done by Dahneke [9,10].He observed sticking of adhesive particles for low veloci-

4
ties, and an increasing coefficient of restitution for velocityhigher than a critical threshold. Wall et al. [58], confirmedthese findings for highly mono-disperse ammonium parti-cles. Thornton et al. [48] and Brilliantov et al. [4] presentedadhesive visco-elasto-plastic contact models in agreementwith these experiments. Work by Sorace et al. [42] furtherconfirms the sticking at low velocities for particle sizes ofthe order of a few mm. Li et al. [22] proposed a dynamicalmodel based on JKR for the impact of micro-sized sphereswith a flat surface. Recently, Saitoh et al. [40] reported neg-ative coefficients of restitution in nanocluster simulations,which is an artefact of the definition of the coefficient ofrestitution; one has to relate the relative velocities to the nor-mal directions before and after collision and not just in theframe before collision, which is especially serious for softerparticles [33]. Jasevicius et al. [16, 17] have recently pre-sented the rebound behavior of ultra fine silica particles us-ing the contact model from Refs. [51–54]. Rozenblat et al.[39] have recently proposed an empirical relation betweenimpact velocity and compression force.
1.2 Model classification
Since our focus is on dry particles, we do not review the di-verse work involving liquid [14] or strong solid bridges [3]here. Even though oblique collisions between two particlesare of practical relevance and have been studied in detail byThornton et al. [47], here we focus on central normal colli-sions without loss of generality. Finally, we also disregardmany details of non-contact forces, as e.g. due to van derWaals forces, for the sake of brevity, but will propose a sim-ple mesoscale non-contact force model in section 2.3.
Based on our review of adhesive, elasto-visco-plastic con-tact models, we propose here a (partial) classification, bydividing them into three groups: (i) Academic, (ii) Meso-scopic, and (iii) Realistic, detailed contact models.
1. Academic contact modelsallow for easy analytical so-lution, as for example the linear spring-dashpot model[23], or piece-wise linear models with constant unload-ing stiffness (see e.g. Walton and Braun [59]), which fea-ture a constant coefficient of restitution, independent ofimpact velocity. Also the Hertzian visco-elastic models,belong to this class, even though they provide a veloc-ity dependent coefficient of restitution, for a summarysee [23]. However, no academic model describes particledeformation that would be practically relevant, as theirrange of strict validity is extremely limited.
2. Mesoscopic contact modelsare a compromise, (i) stillrather easy to implement, (ii) aimed for fast ensemble/bulk-simulations with many particles and various materials,but (iii) not matching all the minute contact details of ev-ery single contact, they are often piece-wise linear, e.g.,
with a variable unloading stiffness or with an extendedadhesive force (Walton and Braun [59], Luding [25])Pasha et al. [35], Thakur et al. [45]).
3. Realistic, full-detail contact modelshave (i) the mostrealistic, but often rather complicated formulation, (ii)can reproduce with similar precision the pair interactionand the bulk behavior, but (iii) are valid only for the lim-ited class of materials they are particularly designed for,since they do include all the minute details of these in-teractions. As a few examples, there are:(a) visco-elastic:Brilliantov [4,5], Haiat [12];(b) adhesive elastic:JKR [19], Dahneke [8], DMT [11],
Thornton and Yin [49];(c) adhesive elasto-plastic:Molerus [30], Thornton and
Ning [48], Tomas [51–54].
Since our main goal is to define and apply contact modelsto simulate the bulk behavior of assemblies of many fineparticles (for which no valid realistic model is available),we focus on the second class, mesoscopic models.
1.3 Focus and Overview of this study
In particular, we study the dependence of the coefficient ofrestitution for two meso-particles on impact velocity andcontact/material parameters, for a wide range of impact ve-locities, using a generalized version of the contact model byLuding [25], extended by a non-contact force term. We ob-serve sticking of particles at low velocity, which is consis-tent with previous theoretical and experimental works [42,48, 58]. Pasha et al. [35] recently also reproduced the lowvelocity sticking using an extension of a similar, simplermodel [28]. Above a certain small velocity, dissipation is notstrong enough to dissipate all relative kinetic energy and thecoefficient of restitution increases. We want to understandthe full regime of relative velocities, and thus focus also onthe less explored intermediate and high velocity regimes, aseasily accessible in numerical simulations. In the intermedi-ate regime, we observe a decrease of the coefficient of resti-tution, as observed previously for idealized particles, see e.g.Refs. [4, 48], but with different functional behavior as pre-dicted by some realistic models, a property that can be tunedby simple modifications to the mesoscopic model. Tanaka etal. [44] have recently reported similar results, when simulat-ing the collision of more realistic dust aggregates, made bymany thousands of nanoparticles that interact via the JKRmodel. With further increase in impact velocity, we find asecond interesting sticking regime due to the increasing ad-hesive dissipation with respect to plastic dissipation. Finally,since the physical systems under consideration also are vis-cous in nature, we conclude with some simulations withadded viscous damping.

5
An exemplary application of our model that leads to theunexpected high velocity sticking and rebound regimes is,among others, the study of coating processes in cold sprays,where researchers are interested in the effect of the impactvelocity on the deposition efficiency of the powder on a sub-strate. In this process, bonding/coating happens when theimpact velocity of the particles exceeds a critical velocity,with values in the order 102 m/s. Interestingly, when the ve-locity is further increased the particles do not bond to thesubstrate anymore, with a decrease of the deposition effi-ciency (inverse of coefficient of restitution) [60]. Schmidt etal. [41] have used numerical simulations to explore the ef-fect of various material properties on the critical velocity,while Zhou et al. [61] studied the effect of impact veloc-ity and material properties on the coating process. The datashow that properties of both particle and substrate influencethe rebound, the details of which go beyond the scope ofthis study. Using our model we can explore the dependenceof the deposition efficiency on the impact velocity, helpingthe interaction between different communities.
In section 2, we introduce the DEM simulation methodand the basic normal contact models, which are further elab-orated on in the following section 3, where the coefficient ofrestitution is computed. Dimensionless contact parametersare proposed in section 4.1, the dependence on contact ad-hesion is described in section 4.2, the effect of viscosity insection 4.3, and some asymptotic solutions are given in sec-tion 4.4. The study is concluded in section 5.
2 Discrete Element Method
The elementary units of granular materials are mesoscopicgrains, which deform under stress. Since the realistic anddetailed modeling of real particles in contact is too compli-cated, it is necessary to relate the interaction force to theoverlapδ between two particles. Note that the evaluation ofthe inter-particle forces based on the overlap may not be suf-ficient to account for the inhomogeneous stress distributioninside the particles and possible multi-contact effects [18].This price has to be paid in order to simulate larger samplesof particles with a minimal complexity and still taking vari-ous physical contact properties like non-linear contact elas-ticity, plastic deformation or load-dependent adhesion intoaccount.
2.1 Equations of Motion
If all forces acting on a spherical particlep, either fromother particles, from boundaries or externally, are known –let their vector sum bef p – then the problem is reducedto the integration of Newton’s equations of motion for thetranslational degrees of freedom (the rotational degrees are
not considered here since we focus on normal forces) foreach particle:
mpd2
dt2 r p = f p+mpg (1)
where,mp is the mass of particlep, r p its position, f p =
∑c f cp is the total force due to all contactsc, andg is the
acceleration due to volume forces like gravity.With tools from numerical integration, solving the equa-
tions of motion, as nicely described in textbooks as [1, 37,38], is a straightforward exercise. The typically short-rangedinteractions in granular media allow for further optimizationby using linked-cell (LC) or alternative methods in order tomake the neighborhood search more efficient. However, thisis not of concern in this study, since only normal pair colli-sions are considered.
2.2 Normal Contact Force Laws
Two spherical particlesi and j, with radii ai anda j , respec-tively, interact if they are in contact so that their overlap,
δ = (ai +a j)− (r i − r j) ·n (2)
is positive,δ > 0, with the unit vectorn= ni j =(r i−r j)/|r i −r j | pointing from j to i. The force on particlei, from particlej, at contactc, can be decomposed into a normal and a tan-gential part asf c := f c
i = f nn+ f t t, wheren · t = 0. In thispaper, we focus on frictionless particles, that is only normalforces will be considered, for tangential forces and torques,see e.g. Ref. [25] and references therein.
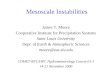
In the following, we discuss various normal contact forcemodels, as shown schematically in Fig. 1. We start with thelinear contact model (Fig. 1(a)) for non-adhesive particles,before we introduce a more complex contact model that isable to describe the realistic interaction between adhesive,inhomogeneous, slightly non-spherical particles (Fig. 1(b)).In the following (section 2.3) the adhesive non-contact forcelaw will be introduced, while the next section 3 is dedicatedto the study and the computation of the coefficient of resti-tution.
2.2.1 Linear Normal Contact Model
Modelling a force that leads to an inelastic collision requiresat least two ingredients: repulsion and some sort of dissipa-tion. The simplest normal force law with the desired proper-ties is the damped harmonic oscillator
f n = kδ + γ0vn , (3)
with spring stiffnessk, viscous dampingγ0, and normal rel-ative velocityvn =−vi j ·n =−(vi −v j) ·n = δ . This model

6
δ
fn = f lin
(a)
δ
fn = fhys
(b)
Fig. 1 Schematic plots of (a) the linear normal contact model for perfectly elastic collision (b) the force-overlap relation for elasto-plastic adhesivecollision
(also called linear spring dashpot (LSD) model) has the ad-vantage that its analytical solution (with initial conditionsδ (0) = 0 andδ (0) = vn
i ) allows the calculations of impor-tant quantities very easily [23]. For the non-viscous case,thelinear normal contact model is given schematically in Fig.1(a).
The typical response time (contact duration) and the eigen-frequency of the contact are related as
tc =πω
and ω =√
(k/mr)−η20 (4)
with the rescaled damping coefficientη0 = γ0/(2mr), andthe reduced massmr = mimj/(mi +mj). From the solutionof the equation of a half-period of the oscillation, one alsoobtains the coefficient of restitution
eLSDn = vf /vi = exp(−πη0/ω) = exp(−η0tc) , (5)
which quantifies the ratio of normal relative velocities after(vf ) and before (vi) the collision. Note that in this modelen
is independent ofvi . For a more detailed review on this andother, more realistic, non-linear contact models, see [23,25]and references therein.
The contact duration in Eq. (4) is also of practical tech-nical importance, since the integration of the equations ofmotion is stable only if the integration time-step∆ t is muchsmaller thantc. Note thattc depends on the magnitude ofdissipation: In the extreme case of an over-damped spring(high dissipation),tc can become very large (which rendersthe contact behavior artificial [27]). Therefore, the use ofneither too weak nor too strong viscous dissipation is rec-ommended.
2.2.2 Adhesive Elasto-Plastic Contacts
Here we apply a variation to the piece-wise linear hystereticmodel [23–25,51,59] as an alternative to non-linear spring-
dashpot models or more complex hysteretic models [48,51–53, 57, 63]. It reflects permanent plastic deformation, whichmight take place at the contact, and stronger attractive (ad-hesive) forces, both depending non-linearly on the maximalcompression force.
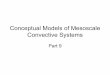
In Fig. 2, the normal force at contact is plotted againstthe overlapδ between two particles. The force law can bewritten as
f hys=
k1δ if k2(δ − δ0)≥ k1δk2(δ − δ0) if k1δ > k2(δ − δ0)>−kcδ−kcδ if − kcδ ≥ k2(δ − δ0)
(6)
with k1 ≤ k2 ≤ kp, respectively the initial loading stiffness,the un-/re-loading stiffness and the elastic limit stiffness.The latter defines the limit force branchkp(δ − δ p
0 ), as willbe motivated below in more detail, andk2 is interpolatingbetweenk1 andkp, see Eq. (10). Forkc = 0, andk2 = kp =
const., the above contact model reduces to that proposed byWalton and Braun [59], which leads to a constant coefficientof restitution
eWBn =
√
k1/kconst.2 , (7)
different from the model presented in the following, for whichk2 is nota constant.
During the initial loading the force increases linearlywith overlapδ alongk1, until the maximum overlapδmax=
vi√
mr/k1 (for binary collisions) is reached, which is a his-tory parameter for each contact. During unloading the forcedecreases alongk2, see Eq. (10), from its maximum valuek1δmax at δmax down to zero at overlap
δ0 = (1− k1/k2)δmax , (8)
whereδ0 resembles thepermanent plastic contact deforma-tion. Reloading at any instant leads to an increase of the

7
δpmaxδmax
k1δ
k2(δ − δ0)
−kcδ
δp0δpminδ0δmin
fhys
δ
kp(δ − δ0p)
Fig. 2 Schematic graph of the piece-wise linear, hysteretic, and adhesive force-displacement model in normal direction.
force along the (elastic) branch with slopek2, until the maxi-mum overlapδmax (which was stored in memory) is reached;for still increasing overlapδ , the force again increases withslopek1 and the history parameterδmax has to be updated.
Unloading belowδ0 leads to a negative,attractive(ad-hesive) force, which follows the line with slopek2, until theextreme adhesive force−kcδmin is reached. The correspond-ing overlap is
δmin =(k2− k1)
(k2+ kc)δmax . (9)
Further unloading follows the irreversible tensile branch, withslope−kc, and the attractive forcef hys=−kcδ .
The lines with slopek1 and−kc define the range of pos-sible force values and departure from these lines takes placein the case of unloading and reloading, respectively. Be-tween these two extremes, unloading and reloading followthe line with slopek2. A non-linear un-/re-loading behaviorwould be more realistic, however, due to a lack of detailedexperimental informations, the piece-wise linear model isused as a compromise; also it is easier to implement. Theelastick2 branch becomes non-linear and ellipsoidal, whena moderate normal viscous damping force is active at thecontact, as in the LSD model.
In order to account for realistic load-dependent contactbehavior, thek2 value is chosen dependent on the maximumoverlapδmax, i.e.particles are more stiff for larger previous
deformationand the dissipation is dependent on deforma-tion. The dependence ofk2 on overlapδmax is chosen empir-ically as linear interpolation:
k2(δmax) =
kp if δmax/δ pmax≥ 1
k1+(kp− k1)δmax/δ pmax
if δmax/δ pmax< 1
(10)
wherekp is the (maximal) elastic stiffness, and
δ pmax=
kp
kp− k1φ f
2a1a2
a1+a2, (11)
is the plastic flow limit overlap, withφ f the dimensionlessplasticity depth. This can be further simplified to
δ p0 = φ f a12, (12)
whereδ p0 represents the plastic contact deformation at the
limit overlap, anda12=2a1a2a1+a2
is the reduced radius.From energy balance, one can define the “plastic” limit
velocity
vp =√
k1/mr δ pmax , (13)
below which the contact behavior is elasto-plastic, and abovewhich the perfectly elastic limit-branch is reached. Impactvelocities larger thanvp can have consequences, as discussednext.
In summary, the adhesive, elasto-plastic, hysteretic nor-mal contact model is defined by the four parametersk1, kp,

8
kc and φ f that, respectively, account for the initial plasticloading stiffness, the maximal, plastic limit (elastic) stiff-ness, the adhesion strength, and the plastic overlap-rangeofthe model; it also involves an empirical choice for the non-linear, load-dependent, intermediate elastic branch stiffnessk2.
2.2.3 Motivation of the original contact model
To study a collision between two ideal, homogeneous spheres,one should refer to realistic, full-detail contact models witha solid experimental and theoretical foundation [19, 48, 51].These contact models feature a small elastic regime and theparticles increasingly deform plastically with increasing, nottoo large deformation (overlap). During unloading, their con-tacts end at finite overlap due to flattening. Otherwise, be-sides many smaller model details there exist various suchmodels. However, one has to consider also the non-contactforces that are often neglected for very large particles, butbecome dominant and hysteretic as well as long-ranged forrather small spheres [51]. A mesoscopic model that com-promises on the details of the contact model, but follows theflat contact detachment philosophy was recently proposed inRef. [35].
The mesoscopic contact model used here was originallyproposed by Luding [25] and follows a different approachin two respects: (i) it introduces a limit to the plastic defor-mation of the particles/material for various reasons as sum-marized below in subsection 2.2.4, and (ii) the contacts arenot idealized as perfectly flat, and thus do not have to losemechanical contact immediately at un-loading, as will be de-tailed in the subsection 2.2.5.
Note that a limit to the slopekp that resemblesa differentcontact behavior at large deformationshas various physicaland numerical reasons:(o) due to the wide probability distribution of forces in bulkgranular matter, only few contacts should reach the limit,which should not effect much the collective behavior;(i) in many particle systems, for large deformations the par-ticles cannot be assumed to be spherical anymore, as theydeform plastically or even could break;(ii) from the macroscopic point of view, too large defor-mations would lead to volume fractions larger than unity,which for most materials (except highly micro-porous, frac-tal ones) would be unaccountable;(iii) at small deformation, contacts are due to surface rough-ness realized by multiple surface asperities and at large de-formation, the single pair point-contact argument breaks downand multiple contacts of a single particle can not be assumedto be independent anymore;(iv) numerically in a bulk simulation the time step is cho-sen such that it is well below the minimal contact durationof all the contacts. Ifk2 is not limited this minimum could
become very small so that the required time step would haveto be reduced below practical values, only because of someextreme contacts.Following two subsections discuss the two major differencesof the present piece-wise linear model as compared to otherexisting models: (i) the elastic limit branch, and (ii) the elas-tic re-loading or non-contact-loss, as well as their reasons,relevance and possible changes/tuning – in cases needed.
2.2.4 Shortcomings, physical relevance and possible tuning
In the context of collisions between perfect homogeneouselasto-plastic spheres, a purely elastic threshold/limitandenduring elastic behavior after a sharply defined contact-loss are indeed questionable, as the plastic deformation ofthe single particle cannot become reversible/elastic. Never-theless, there are many materials that support the idea of amore elastic behavior at very high impact velocity (or con-tact force).
In the following, we will list some of these cases andextensively comment on them.
Mesoscopic contact model applied to real materials: Firstwe want to recall that the present model is mainly aimedto reproduce the behavior of multi-particle systems of real-istic fine and ultra-fine powders, which are typically non-spherical and often mesoscopic in size with internal micro-structure and micro-porosity on the scale of typical contactdeformation. For example, think of clusters/agglomeratesofprimary nano-particles that form fine micron-sized secondarypowder particles, or other fluffy materials. The primary par-ticles are possibly better described by other contact models,but in order to simulate a reasonable number of secondaryparticles one cannot rely on this bottom-up approach andbetter uses a meso-contact model. During the bulk compres-sion of such a system, the material deforms plastically andits internal porosity reduces. Plastic deformation diminishesif the primary particles are elastic/stiff and the materialhasbecome dense, almost non-porous. Beyond this point thesystem deformmore elastically, i.e. the stiffness becomeshigh and the (irrecoverable) deformations are much smallerthan initially.
In their compression experiments of granular beds withmicrometer sized granules of micro-crystalline cellulose, Pers-son et al. [36] found that a contact model where a limit onplastic deformation is introduced can very well describe thebulk behavior. Experimentally they observe a strong elasto-plastic bulk-behavior for the assembly at low compressionstrain/stress. In this phase the height of the bed decreases,irreversibly and almost linearly with the applied load, whilethe deviation from linearity strongly increases beyond a cer-tain strain/stress, with a dramatic increase of the stiffness

9
of the aggregate. They associate the change in the behav-ior to the loss of porosity and the subsequent more elasticbulk response to the particles that are now closely in touchwith each other. In this new, considerably denser configu-rations, not much more void reduction is allowed and thusthe behavior gets more elastic. While the elastic limit in thecontact model does not affect the description of the bulk be-havior in the first part, the threshold is found to play a keyrole in order to reproduce the material stiffening (see Fig.8in Ref. [36]).
Note that in an assembly of particles, not all the contactswill reach the limit branch and deform elastically simulta-neously. That is, even if few contacts are in the elastic limit,the system will always retain some plasticity, hencethe as-sembly will never be fully elastic.
Application to pair interactions: Interestingly, the contactmodel in Sec. 2.2.2 is suitable to describe the collision be-tween pairs of particles, when special classes of materialsare considered, such that the behavior at high velocity andthus large deformation drastically changes.
(i) Core-shell materials.The model is perfectly suitedfor plastic core-shell materials, such as asphalt or ice par-ticles, having a “soft” plastic outer shell and a rather stiff,elastic inner core. For such materials the stiffness increaseswith the load due to an increasing contact surface. For higherdeformations, contact between the inner cores can take place,which turns out to be almost elastic when compared to thebehavior of the external shell. The model was successfullyapplied to model asphalt, where the elastic inner core is sur-rounded by a plastic oil or bitumen layer [34]. Alternatively,the plastic shell can be seen as the range of overlaps, wherethe surface roughness and inhomogeneities lead to a differ-ent contact mechanics as for the more homogeneous innercore.
(ii) Cold spray.An other interesting system that can beeffectively reproduced by introducing an elastic limit in thecontact model is cold spray. Researchers have experimen-tally and numerically shown that spray-particles rebound fromthe substrate at low velocity, while they stick at intermediateimpact energy [32,41,43,62]. Wu et al. [60] experimentallyfound that rebound re-appears with a further increase in ve-locity (Fig. 3 in Ref. [60]). Schmidt et al. [41] relate thedecrease of the deposition efficiency (inverse of coefficientof restitution) to a transition from a plastic impact to hydro-dynamic penetration (Fig. 16 in Ref. [41]). Recently Moridiet al. [32] numerically studied the sticking and rebound pro-cesses, by using the adhesive elasto-plastic contact modelofLuding [25], and their prediction of the velocity dependentbehavior is in good agreement with experiments.
(iii) Sintering.As an additional example, we want to re-call that the present meso-contact model has already beenapplied to the case of sintering, see Ref. [29]. For large de-
formations, large stresses, or high temperatures, the materialgoes to a fluid-like state rather than being solid. Hence, theelasticity of the system (nearly incompressible melt) deter-mines its limit stiffness, whileφ f determines the maximalvolume fraction that can be reached.
All the realistic situations described above clearly hint ata modification in the contact phenomenology that can not bedescribed anymore by an elasto-plastic model beyond somethreshold in the overlap/force. The limit stiffnesskp and theplastic layer depthφ f in our model allow the transition ofthe material to a new state. Dissipation on the limit branch– which otherwise would be perfectly elastic – can be takencare of by a viscous damping force (as the simplest option).Due to viscous damping, the unloading and re-loading willfollow different paths, so that the collision will never be per-fectly elastic, which is in agreement with the description inJasevicius et al. [16,17] and will be shown below in subsec-tion 4.3.
Finally, note that an elastic limit branch is surely not theultimate solution, but a simple first model attempt – possiblyrequiring material- and problem-adapted improvements inthe future.
Tuning of the contact model: The change in behavior atlarge contact deformations is thus a feature of the contactmodel which allows us to describe many special types ofmaterials. Nevertheless, if desired, without changing themodel,the parameters can be tuned in order to reproduce the be-havior of materials where the plasticity keeps on increasingwith deformation. The limit-branch where plastic deforma-tion ends is defined by the dimensionless parameters plas-ticity depth,φ f , and (maximal) elastic stiffness,kp. Owingto the flexibility of the model, it can be tuned such that thelimit overlap is set to a much higher value which is neverreached by the contacts. When the new value ofφ f
′is cho-
sen, a newkp′can be calculated to describe the behavior at
higher overlap (as detailed in Appendix B). In this way themodel with the extendedφ f
′exhibits elasto-plastic behavior
for a higher velocity/compression-force range, while keep-ing the physics of the system for smaller overlap identical tothe one with smallφ f .
2.2.5 Irreversibility of the tensile branch
Finally we discuss a feature of the contact model in [25],that postulates the irreversibility, i.e. partial elasticity, of thetensilekc branch, as discussed in Sec. 2.2.2. While this isunphysical in some situations, e.g. for homogeneous plas-tic spheres, we once again emphasize that we are interestedin non-homogeneous, non-spherical meso-particles, as e.g.clusters/agglomerates of primary particles in contact withinternal structures of the order of typical contact deforma-tion.

10
Only for ideal, perfect, elasto-plastic adhesive spheresthat experience a large enough tensile force, the particlesdetach with a (perfect) flattened surface due to plasticity.In almost all other cases, the shape of the detaching sur-faces and the subsequent behavior depend on the relativestrength of plastic, attractive, and other contact mechanisms.Moreover, other details like particle rotation can also play arole. Few examples include core-shell materials [34], assem-blies of micro-porous fine powders [36] or atomic nanopar-ticles [44]. We first briefly discuss the case of ideal elasto-plastic adhesive particles and later describe the behaviorofmany particle systems, which is the main focus of this work.
For ideal homogeneous particles with radius of the orderof milli-meters [35, 48], a permanently flattened surface iscreated during deformation of the order of micrometers andthe plastic dissipation during mechanical contact is domi-nant with respect to the van der Waals force. When the par-ticles detach during unloading, the force suddenly drops tozero from the tensile branch. During non-contact, furtherun- and reloading involves no force; when the contact isre-established it also is assumed to be mostly elastic, follow-ing the previous contact-unloading path. Thus re-establishedcontacts have little or no plastic deformation until the (pre-viously reached) maximum overlap is reached again – fromwhen on strong plasticity kicks in again.
On the other hand for ultra-fine ideal spherical particlesof order of macro-meters [51,54,55], the van der Waals forceis much stronger and unloading adhesion is due to purelynon-contact forces. Therefore, the non-contact forces do notvanish and even extend beyond the mechanical first contactdistance. The contact model of Tomas [51, 54] is reversiblefor non-contact and features a strong plastic deformation forthe re-established contact – in contrast to the previous caseof large particles.
The contact model by Luding [25] follows similar con-siderations as others, except for the fact that the mechanicalcontact doesnot detach, as discussed next. The irreversible,elastic re-loading before complete detachment can be seenas a compromise between small and large particle mechan-ics, i.e. between weak and strong attractive forces. It alsocould be interpreted as a premature re-establishment of me-chanical contact, e.g., due to a rotation of the particles. De-tachment and remaining non-contact is only then valid if theparticles do not rotate relative to each other; in case of rota-tions, both sliding and rolling degrees of freedom can lead toa mechanical contact much earlier than in the ideal case ofa perfect normal collision of ideal particles. In the spiritof amesoscopic model, the irreversible contact model is due tothe ensemble of possible contacts, where some behave likeimagined in the ideal case, whereas some behave stronglydifferent, e.g., due to some relative rotation. However, thereare several other good reasons to consider an irreversible un-loading branch.
In the case of asphalt (core-shell material with a stonecore and bitumen-shell), dependent on the composition ofthe bitumen, it can contain a considerable amount of finesolids that will behave softly for loading, but rather stiffforre-loading (elastick2 branch). (Bitumen with fine fillers isreferred to as “mastic”, but a more detailed study of thisclass of materials goes beyond the scope of this study.) [34]
For atomistic nano-particles and for porous particles, onething in common is the fact the typical deformations canbe much larger than the primary particles inhomogeneitiesand that the adhesion of the primary particles is very strong,which leads to their re-arrangements (see Fig. 5 in Ref. [44]).That is the bulk material will deform plastically (irreversibly)even if the primary particles can be assumed to be perfectlyelastic. We can not assume permanent ideal flattening andfull loss of mechanical contact during unloading for the meso-scopic particles: Many contacts between the primary parti-cles and surface inhomogeneities will be lost, but – due totheir strong attraction – many others will keep their con-tacts. Strong clusters of primary particles will remain intactand can form bridges (threads) or clumps during unloading– which either keep the two surfaces in contact beyond theidealized detachment point or can lead to an elastic repulsiondue to a clump-particle sitting between the surfaces (see Fig.3 in Ref. [25]).
When reloading, the (elastic) connecting elements influ-ence the response; rearrangements of the primary particles(and clusters) happen on the surface, leading to its reshap-ing – leaving a surely non-flat contact surface.
Also in this case, as often mentioned for granular sys-tems, the interaction of several elastic particles does notim-ply bulk elasticity of the assembly, due to rearrangements.Thus, in the present model an irreversible tensile branch isassumed, without distinction between the behavior beforeand after the first contact-loss-point other than the intrin-sic non-linearity in the model: The elastic stiffness for re-loading k2 decreases the closer it comes toδ = 0; in thepresent version of the contact model,k2 for unloading fromthek1 branch and for re-loading from thekc branch are ex-actly matched.
As a final remark, for almost all models on the market– due to convenience and numerical simplicity, in case ofcomplete detachmentδ < 0 – the contact is set to its initialstate, since it is very unlikely that the two particles will touchagain at exactly the same contact point as before. On theother hand in the present model a long-range interaction isintroduced, in the same spirit as [52, 54]. Reloading in thenon-contact (δ < 0) regime is perfectly elastic, as it refersto the non-contact of surfaces and is due only to long-rangeattractive (van der Waals) forces, as will be detailed in thenext subsection.

11
δ
f adh
−fa
δa
kca
(a)
δ
f jump−in
−fa
(b)
Fig. 3 Schematic plots of (a) the non-contact adhesive force-overlap relation and (b) the non-contact jump-in force-overlaprelation.
2.3 Non-contact normal force
It has been shown in many studies that long-range interac-tions are present when dry adhesive particles collide, i.e.forces are present even for negative overlapδ [25,48,54,55].In the previous section, we have studied the force laws forcontact overlapδ > 0. In this section we introduce a de-scription for non-contact, long range, adhesive forces, fo-cusing on the two non-contact models schematically shownin Fig. 3 – both piece-wise linear in the spirit of the meso-scopic model – namely the reversible model and the jump-in(irreversible) non-contact models (where the latter couldbeseen as an idealized, mesoscopic representation of a liquidbridge, just for completeness). Later, in the next section,wewill combine non-contact and contact forces.
2.3.1 Reversible Adhesive force
In Fig. 3(a) we consider the reversible attractive case, wherea (linear) van der Waals type long-range adhesive force isassumed. The force law can be written as
f adh=
− fa if δ > 0−ka
cδ − fa if 0 ≥ δ > δa
0 if δa > δ(14)
with the range of interactionδa = − fa/kac, whereka
c > 0 isthe adhesive strength of the material andfa > 0 is the (con-stant) adhesive force magnitude, active for overlapδ > 0 inaddition to the contact force. Whenδ = 0 the force is− fa.The adhesive forcef adh is active when particles are closerthanδa, when it starts increase/decrease linearly along−ka
c,for approach/separation respectively. In the rest of the pa-per, for the sake of simplicity and without loss of generality,the adhesive strength will be chosen as coincident with thecontact adhesive stiffness in Sec. 2.2.2, that iska
c = kc.
2.3.2 Jump-in (Irreversible) Adhesive force
In Fig. 3(b) we report the behavior of the non-contact forceversus overlap when the approach between particles is de-scribed by a discontinuous (irreversible) attractive law.Thejump-in force can be simply written as
f jump−in =
{
0 if δ < 0− fa if δ ≥ 0
. (15)
As suggested in previous studies [4, 19, 48], there is no at-tractive force before the particles come into contact; the ad-hesive force becomes active and suddenly drops to a nega-tive value,− fa, at contact, whenδ = 0. The jump-in forceresembles the limit caseka
c → ∞ of Eq. (14). Note that thebehavior is defined here only for approach of the particles.We assume the model to be irreversible, as in the unloadingstage, during separation, the particles will not follow thissame path (details will be discussed below).
3 Coefficient of Restitution
As already mentioned, we can quantify the amount of dissi-pated energy relative to the incident kinetic energy in termsof the coefficient of restitutione, by using the expression1−e2.
When we consider a pair collision, with particles ap-proaching from infinite distance, the coefficient of restitu-tion can be defined as
e=vf
∞
vi∞ (16a)
and further decomposed as
e=vf
∞
vf
vf
vi
vi
vi∞ = εoenεi , (16b)
where three different regimes have been introduced to de-scribe the pair interaction.εi andεo are the pull-in and pull-off coefficients of restitution, that describe the non-contact

12
parts of the interaction (δ < 0), for approach and separationof particles respectively, whileen is the coefficient of resti-tution defined for particle in contact (δ > 0). vi
∞ andvf∞
denote the approach and separation velocities at infinity dis-tance, when the (short- and long-range) interaction force iszero.vi is the approaching velocity at zero contact overlapδ = 0 (start of contact) andvf is the separation velocity atzero overlapδ = 0 when the particles are separating (end ofcontact).In the following, we will first analyze each term in Eq. (16b)separately, based on energy considerations. Then we willshow combined contact models using the non-contact andcontact components described in sections 2.2-2.3 and pro-vide the coefficient of restitution for this wide class of mod-els.
3.1 Pull-in coefficient of restitution
In order to describe the pull-in coefficient of restitutionεi
we focus on the two non-contact models proposed in Sec.2.3, as simple interpretations of the adhesive force duringthe approach of the particles.
When thereversible adhesivecontact model is used, theenergy conservation argument
12
mrvi∞2 =
12
faδa+12
mrvi2 (17a)
yields the following expression forεi :
εadhi =
vi
vi∞ =
√
1− faδa
mrvi∞2 =
√
1+f 2a/kc
mrvi∞2 . (17b)
The pull-in coefficient of restitution increases with increas-ing adhesive force magnitudefa due to increase in attractiveforce. and decreases with the adhesive strength of the mate-rial kc. On the other hand, if theirreversible adhesive jump-in model is implemented, a constant valueε jump−in
i = 1 isobtained, asf jump−in = 0 for δ < 0 and the velocity is con-stantvi = vi
∞.
3.2 Normal coefficient of restitution
When focusing on the contact coefficient of restitutionen
and writing the energy balance between the start and end ofcontact interaction, we get
12
mrvi2 =Wdiss+
12
mrvf2 (18a)
and
en =vf
vi=
√
1− 2Wdiss
mrvi2 , (18b)
whereWdiss denotes the amount of energy dissipated duringthe collision.
If the linear contact model (see Sec. 2.2.1) is consideredin the absence of viscous damping (LS),Wdiss is zero, hencethe normal coefficient of restitutioneLS
n = 1. On the otherhand, for either viscous damping or in the case ofadhesiveelasto-plasticcontacts (see Sec 2.2.2), there is finite dissi-pation. AsWdiss is always positive, the normal coefficientof restitution is always smaller than unity, i.e.eLSD < 1 andeHYS
n < 1. The coefficient of restitution for the linear springdashpot model is given in Eq. (5), while the elasto-plasticcontact model will be discussed below.
3.3 Pull-off coefficient of restitution
The pull-off coefficient of restitution is defined for particlesthat lose contact and separate, using theadhesive reversiblemodel as described in section 2.3.1.
By assuming energy conservation
12
mvf∞2 =
12
faδa+12
mvf2 , (19a)
we obtain the following expression
εo =vf
∞
vf=
√
1+faδa
mvf2 =
√
1− f 2a/kc
mvf2 . (19b)
Similarly to what already seen for Eq. 17b, the pull-off co-efficient of restitution depends on both the adhesive forcemagnitudefa and strengthkc, other than the separation ve-locity vf . As the particles feel an attractive force during un-loading, part of their kinetic energy is lost and henceεo < 1in Eq. (19b).
It is worthwhile to notice that the force-overlap picturedescribed above, withεo defined as in Eq. (19b) refers toa system with sufficiently high impact velocity, so that theparticles can separate with a finite kinetic energy at the endof collision. That is
vf2 > f 2
a/(mkc) =: (vaf )
2 (20)
or, equivalently,v∞i > va
f /(enεi), wherevaf denotes the max-
imum relative velocity at which particles actually can sepa-rate. On the other hand, if the kinetic energy reaches zerobefore the separation, e.g. during the unloading path, theparticles start re-loading along the adhesive branch untilthevalueδ = 0 is reached and they follow contact law definedfor δ > 0 again.

13
δ
δ
B
F
B
f tot
A ≡ E
A ≡ E
G ≡ F
(a)
D
f tot
B
δ
C
A ≡ E
F
(b)
Fig. 4 (a) Reversible and irreversible non-contact forces, wherethe top blue line (for negative overlap) represents the former and the bottom redline (for negative overlap) the latter. The black line for positive overlap represents the linear contact force as superimposed on the non-contactforce. (b) Force-displacement law for elasto-plastic, adhesive contacts superimposed on the irreversible non-contact adhesive force.
3.4 Combined contact laws
The contact and non-contact models described in previoussections 3.1, 3.2 and 3.3 can be combined in order to ob-tain the overall description of the system behavior, duringapproach, contact and final separation of the particles.
For example, the combination of the pull-in, the linearnormal and the pull-off components leads to areversible ad-hesive linearcontact model, as shown schematically in theupper part of Fig. 4(a), with coefficient of restitutione=
εoeLSDn εadh
i . On the other hand, by combining the irreversible(jump-in) pull-in, the linear normal and the (reversible) pull-off components (see schematic in the lower part of Fig. 4(a))we get coefficient of restitutione= εoeLSD
n ε jump−ini .
In the following we will focus on the combination of theirreversible pull-in with the adhesive elasto-plastic andthe(reversible) pull-off parts, leading to anirreversible adhesiveelasto-plasticmodel, see Fig. 4(b), withe= εoeHYS
n ε jump−ini =
εoeHYSn . For this special case we want to analyze the influ-
ence of the adhesive component/parameters on the overallbehavior.
In Fig. 5, we plot the coefficient of restitutione. as afunction of impact velocity for both the irreversible elastic(en = eLSD
n ) and the irreversible elasto-plastic (en = eHYSn )
contact models. We observe that for low velocity the systembehaves in a similar fashion in both cases, showing an ini-tial sticking regime, in agreement with previous experimen-tal and numerical results [42, 48, 58] At higher velocities,asignificant difference appears: for elastic adhesive spheres,e keeps increasing and approaches unity while, for elasto-plastic adhesive spheres,e starts decreasing at intermediatevelocity until it becomes zero at higher velocity. This dif-
ference is related with the sources of dissipation in the twomodels. In the irreversible elastic case, energy is dissipatedonly due to the pull-off of the particles, which is significantin low velocity range only. On the contrary, for irreversibleelasto-plastic spheres, dissipation takes place during both,pull-off and normal contact, stages. The latter, new, effect isnegligible for low velocity (hence the two models coincide)but it becomes important for large impact velocity, leadingto a second, high velocity, sticking regime, (that will be dis-cussed in detail below).
Furthermore, in Fig. 6, we focus on the strength of thenon-contact adhesionfa and we plote against the impactvelocity for different fa. We observe that forfa = 0, en ≈ 1at low velocities, while, for finitefa, the particles stick toeach other withen = 0. The critical velocityva
f required toseparate the particles increases withfa. For extreme valuesof fa the particles stick in the whole range of velocities.
It is interesting to notice that for very lowfa and lowimpact velocities the behavior is independent of the adhesiveforce magnitude (cyan line and black circles lie on top ofeach other in Fig. 6). In the further sections we restrict ouranalysis to this range offa and impact velocity.
4 Elasto-plastic coefficient of restitution
In the following we will restrict our analytical study on thecoefficient of restitution to the range of moderate and largeimpact velocity, where the contribution of weak non-contactadhesive forcesfa → 0 can be neglected. Furthermore, wedisregard viscous forces in order to allow for a closed ana-lytical treatment. The coefficient of restitution will be com-

14
10−5
10−4
10−3
10−2
10−1
100
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
vi∞ (m/s)
e
Elastic adhesive
Elasto-plastic adhesive
Fig. 5 Restitution coefficiente plotted as a function of the impact velocityv∞i en− > e andvi− > v∞
i for irreversible elastic-adhesive and elasto-plastic adhesive spheres (as given in the inset). Parameters used here arek1 = 102 Nm−1, kp = 5×102 Nm−1, kc = 102 Nm−1, and fa = 5×10−7 N,which leads to the low-velocity sticking limitva
f = 2.1× 10−5m/s, for particles with radius 1.1.10−3 m, density 2000 kg/m3, and massm=
5.6×10−6 kg.
10−6
10−4
10−2
100
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
vi∞ (m/s)
e
fa=1×10−7 N
fa=1×10−5 N
fa=1×10−4 N
fa=5×10−4 N
fa=1×10−3 N
fa=0 N
Fig. 6 Restitution coefficient plotted as function of impact velocity. Different lines correspond to the analytical expression in Eq. (27) with differentfa as given in the inset. Black circles represent the numericalsolution results forfa = 0, where parameters are the same as in Fig. 5.
puted and its dependence on the impact velocityvi and theadhesive stiffnesskc is considered for two casesvi < vp andvi > vp, with vp defined in Eq. (13).
4.1 Theory and dimensionless parameters
4.1.1 Initial relative velocity vi < vp
Whenvi < vp the particles after loading, unload with slopek2 and the system deforms along the path 0→ δmax→ δ0 →δmin → 0, as described in the Sec. 2.2.2 and shown in Fig. 2.
The initial kinetic energy (atδ = 0 overlap) is com-pletely transformed to potential energy at the maximum over-lap δmax,
12
mrv2i =
12
k1δ 2max . (21a)
The direction of relative velocity is reversed atδmax, unload-ing starts with slopek2 and some part of the potential energyis converted to kinetic energy at the force-free overlapδ0,
12
mrv20 =
12
k2(δmax− δ0)2 , (21b)

15
which, using Eq. (8), can be written as
12
mrv20 =
12
k1δmax(δmax− δ0) . (21c)
Further unloading, belowδ0, leads to attractive forces. Thekinetic energy atδ0 is partly converted to potential energy atδmin
12
mrv2min+
12
k2(δmin− δ0)2 =
12
mrv20 . (21d)
The total energy is finally converted to only kinetic energyat the end of the collision (overlapδ = 0)
12
mrv2f −
12
mrv2min =−1
2kcδ 2
min , (21e)
that, when combined with (21d), gives
12
mrv2f −
12
mrv20 =−1
2kcδminδ0 (21f)
Using Eqs. (21a), (21c), and (21f) with the definitions ofδmin andδ0, and dividing by the initial kinetic energy, weobtain the coefficient of restitution
e(1)n =vf
vi=
√
k1
k2− kc
k1
(k2− k1)
(k2+ kc)
(k2− k1)
k2(22)
with k2 = k2(δmax) = k2(vi), as defined in Eq. (10).
4.1.2 Initial relative velocity vi > vp
When the initial relative velocityvi is large enough such thatvi > vp, the estimated maximum overlapδmax= vi
√
mr/k1
is greater thanδ pmax. Let v1 be the velocity at overlapδ p
max.The system deforms along the path 0→ δ p
max → δmax →δ0 → δmin → 0, see Fig. 2. The initial relative kinetic energyis not completely converted to potential energy atδ = δ p
max,hence
12
mrv2i =
12
mrv21+
12
k1(δ pmax)
2, (23a)
and the loading continues with the slopekp until all kineticenergy equals zero atδ = δmax> δ p
max
12
mrv21+
12
k1(δ pmax)
2 =12
kp(δmax− δ0)2, (23b)
the relative velocity changes sign atδmax, the contact startsto unload with slopekp. The potential energy is completelyconverted to kinetic energy atδ0, such that the equality
12
mrv20 =
12
kp(δmax− δ0)2 (23c)
or
12
mrv20 =
12
k1δ pmax(δ
pmax− δ0)+
12
mrv21 (23d)
holds. Further unloading, still with slopekp, leads to attrac-tive forces untilδ p
min is reached, where the kinetic energy ispartly converted to potential energy
12
mrv2min+
12
kp(δ pmin− δ0)
2 =12
mrv20 . (23e)
The unloading continues alongkc and the total energy atδ p
min is finally converted to only kinetic energy at the end ofcollision (δ = 0 overlap), so that
12
mrv2f −
12
mrv2min =−1
2kc(δ p
min)2 . (23f)
Using Eqs. (23c) and (23d) in Eq. (23f) gives
12
mrv2f −
12
mrv20 =−1
2kcδ p
minδ0 . (23g)
Combining Eqs. (23a), (23b), (23c), (23g) with the defini-tions of δ p
min andδ0, and dividing by the initial kinetic en-ergy, we obtain the coefficient of restitution
e(2)n =
√
1+
[
−1+k1
kp− kc
k1
(kp− k1)2
(kp+ kc)kp
]
v2p
v2i
, (24)
with vp/vi < 1.
4.1.3 Dimensionless Parameters
For a more general description, a few dimensionless param-eters can be defined:
Plasticity :η =kp− k1
k1, (25a)
Adhesivity :β =kc
k1, (25b)
Scaled initial velocity :χ =δmax
δ pmax
∼ vi
vp. (25c)
The final dimensionless number, given here for the sake ofcompleteness, but not used in this subsection, is the ratioof maximum velocity at which particles stick due to ad-hesion only to the initial relative velocity of the particles.ψa = va/v∞
i ≪ 1.Using Eqs. (25a), (25b) and (25c) in Eq. (10), one can
define
k2(χ) ={
kp if χ ≥ 1k1 (1+ηχ) if χ < 1
, (26)
while the coefficients of restitution,e(1)n in Eq. (22) ande(2)n
in Eq. (24) become
e(1)n (η ,β ,χ < 1) =
√
11+ηχ
− β η2χ2
(1+ηχ)(1+β +ηχ)(27)

16
and
e(2)n (η ,β ,χ ≥ 1) =
√
1+[A(η ,β )−1]1
χ2 , (28)
with
A(η ,β ) =[
e(1)n (η ,β ,χ = 1)]2
. (29)
4.1.4 Qualitative Description
In Fig. 7, the analytical prediction for the coefficient of resti-tution, from Eqs. (27) and (28), is compared to the numericalintegration of the contact model, for different scaled initialvelocitiesχ . We confirm the validity of the theoretical pre-diction for the coefficient of restitution in the whole range.
For very smallηχ < 10−3, en can be approximated as
e(1)n ≈ 1− ηχ2 , which gives a good agreement to 2 orders
of magnitude in velocity. With increasing initial relativeve-locity vi , dissipation increases faster than the initial kinetic
energy leading to a faster convex decrease ofe(1)n . The coef-
ficient of restitutione(1)n becomes zero when a critical scaledinitial velocity χ (1)
c (see Eq. (31)) is reached. At this point,the amount of dissipated energy is equal to the initial kineticenergy, leading the particles to stick. The coefficient of resti-tution remains zero until a second critical scaled initial ve-locity χ (2)
c is reached, i.e. sticking behavior is observed for
χ (1)c ≤ χ ≤ χ (2)
c . Finally, for χ > χ (2)c , the dissipated energy
remains constant (plastic limit is reached), while the initialkinetic energy increases. As a result, the kinetic energy aftercollision increases and so does the coefficient of restitutionen. 1 The increase inen with the velocity is because of a limiton maximum plastic overlap, thereby making the plastic dis-sipation to be constant forδ > δ p
max.Certainly, this is in contrast to what is expected and ob-
served in experiments on some types of elasto-plastic granu-lar materials. We point out that this behavior shows up onlyat very high velocities (x-axis in Fig. 7 has increased by 2orders of magnitude). Moreover, the definition ofen mightbecome questionable at that high velocity, as the particlescan fragment/break and physics of the system has to be re-considered. At such large deformations the particles cannotbe assumed to be spherical anymore. On the other hand, theincrease ofen for high velocity is a familiar observation inthe cold spray community [41, 43, 62]. After a given (criti-cal) velocity the spray particles adhere to the substrate, andthey do so for a range of impact velocities, while increas-ing velocity further leads to unsuccessful deposition, i.e. the
1 Note that this is the regime where the physics of the contactchanges and dependent on the material and other considerations, mod-ifications to the contact model could/should be applied, however, thisgoes beyond the scope of this paper.
particles will bounce from the substrate. The sticking phe-nomenon of the material has been extensively studied exper-imentally and numerically [41,43,60–62].
As explained in the previous section 2.2.3, a pre-determinatethresholdδ p
max on the plastic regime is the reason for theanomalous elastic high velocity behavior of the coefficientof restitution. The model can be tuned by choosing a higherφ f , re-calculatingkp, thereby keeping the behavior plastic inthe whole range of interest for the velocity and the collisiondynamics up toδ p
max unchanged (see appendix B). Neverthe-less, we consider a reference value forφ f (andkp) based onthe maximum volume fraction of the multi-particle granularassembly, such that the macroscopic behavior is reasonableand in good agreement with the experiment, e.g. based onour simulations on split-bottom ring shear cell [26]. Also,ina typical DEM simulation, the maximum overlap is 5−10%of the reduced particle radius. This is illustrated in Fig. 8,where we ploten against the normalized velocityχ = vi
vp,
for different values ofφ f , with vp calculated from the samereference stiffness input parametersφ f andkp. Referenceφ f
is chosen to be 0.05, which would meanδ p0 = 0.05a. For
low velocity the different curves lie on the top of each other,showing that the collision dynamics stays unaffected by thechange inφ f . The onset of the increase inen shifts to rightwith increasingφ f , providing a fully plastic regime at highχ if desired.
In Fig. 9, we compare the variation of the force withoverlap in the various regimes ofχ as discussed above forφ f = 0.05. For very smallχ , the unloading slopek2 ≈ k1,(see Fig. 9(a) for a moderately smallχ = 0.34), and theamount of dissipated energy is small, increasing withχ . Thekinetic energy after collision is almost equal to the initial ki-netic energy, i.e.en ∼ 1, see Fig. 7. In Figs. 9(b) and 9(c),the force-overlap variation is shown for sticking particles,
for the casesχ (1)c < χ < 1 and 1< χ < χ (2)
c , respectively(more details will be given in the following subsection). Fi-
nally, in Fig. 9(d), the caseχ > χ (2)c is displayed, for which
the initial kinetic energy is larger than the dissipation, re-sulting in the separation of the particles. The correspondingenergy variation is described in detail in the appendix.
4.1.5 Sticking regime limits and overlaps
In this section we focus on the range ofχ (1)c < χ ≤ χ (2)
c ,where the particles stick to each other and calculate the crit-
ical valuesχ (1)c and χ (2)
c . Also we assumeβ to be largeenough so that sticking is possible, as we show in later sec-tion that for a givenη a minimumβ = β ∗ is required for
particles to stick. Whenχ = χ (1)c all initial kinetic energy
of the particles is dissipated during the collision. Hence theparticles stick anden becomes zero:
e(1)n (η ,β ,χ (1)c ) = 0 , (30a)

17
10−5
10−4
10−3
10−2
10−1
100
101
102
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
χ
e n
χ<1χ>1Low χ approx.DEM simulated data
Fig. 7 Restitution coefficient plotted as a function of the scaled initial velocity χ . The thick red line correspond to the analytical expressions inEqs. (27), dashed blue line to (28), and circles are DEM simulations, while the thin black line represents the low velocity approximation resultsfor the same material parameters as in Fig. 5, i.e.η = 4 andβ = 1.
10−4
10−3
10−2
10−1
100
101
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
χ=vi/v
p
e n
Fig. 8 Restitution coefficient plotted as a function of the scaled initial velocity χ . The blue solid line corresponds to the solution forχ < 1, withφ f = 0.05, while the dashed lines with different colors represent the behavior once limit overlap is reached. Blue, green and red representen forφ f = 0.1, φ f = 0.5 andφ f = 1.0 respectively.φ f = 1.0 means fully plastic limit, as it would setδ p
0 = a, wherea is the radii of particle.
which leads to
β η2χ2−ηχ − (1+β ) = 0 . (30b)
Only the positiveχ solution is physically possible, as parti-cles with negative initial relative velocity cannot collide, sothat
χ (1)c =
12β η
[
1+√
1+4β (1+β )]
. (31)
For largerχ > χ (1)c , the dissipation is strong enough to con-
sume all the initial kinetic energy, hence the particles loosekinetic energy at a positive, finite overlapδc, see Fig. 9(b).
The contact deforms along the path 0→ δmax→ δ0 → δmin→δc. Thereafter, in the absence of other sources of dissipation,particles keep oscillating along the same slopek2. In order tocomputeδc, we use the energy balance relations in Eqs. (21),and conservation of energy alongδmin → δc, as described byEq. (21e)
12
mrv2f −
12
mrv20 =−1
2kc
{
δminδ0−12
kcδ 2c
}
, (32a)
with vf = 0 at the overlapδc. Re-writing in terms ofkc andδmax leads to
kcδ 2c +
{
k21
k2− kc(k2− k1)
2
k2(k2+ kc)
}
δ 2max= 0 (32b)

18
-0.01
0
0.01
0.02
0 5.10-5 10-4
f (N
)
δ (m)
χ =0.34
γ0=0k1 δ-kc δkp (δ−δ0)
(a)
-0.01
0
0.01
0.02
0 5.10-5 10-4
f (N
)
δ (m)
χ =0.69
γ0=0k1 δ-kc δkp (δ−δ0)
(b)
-0.01
0
0.01
0.02
0 5.10-5 10-4
f (N
)
δ (m)
χ =1.1
γ0=0k1 δ-kc δkp (δ−δ0)
(c)
-0.01
0
0.01
0.02
0 5.10-5 10-4
f (N
)
δ (m)
χ =1.37
γ0=0k1 δ-kc δkp (δ−δ0)
(d)
Fig. 9 Contact force during one collision, plotted against the overlap for different scaled initial velocitiesχ = 0.34, 0.69, 1.1, and 1.37, respectively.The three straight lines represent the plastic branch, withslopek1, the adhesive branch, with slope−kc, and the limit branch with slopekp, fork1 = 102 Nm−1, kp = 5×102 Nm−1, kc = 102 Nm−1 andφ f = 0.05, i.e.η = 4 andβ = 1
and thus to the sticking overlap
δ (1)c
δ pmax
=δmax
δ pmax
√
(k2− k1)2
k2(k2+ kc)− k2
1
k2kc. (32c)
In terms of dimensionless parameters, as defined earlier, onegets
δ (1)c
δ pmax
= χ
√
η2χ2
(1+ηχ)(1+β +ηχ)− 1
β (1+ηχ)=
χ√
β|e(1)n | ,
(33)
where|e(1)n | denotes the absolute value of the result from Eq.(27)
For larger initial relative velocities,χ ≥ 1, the coefficientof restitution is given by Eq. (28), so that the second critical
1< χ (2)c can be computed setting
e(2)n (η ,β ,χ (2)c ) = 0 , (34a)
or[
11+η
− β η2
(1+η)(1+β +η)−1
]
1χ2 = 1 . (34b)
Again, only the positive solution is physically possible, sothat
χ (2)c =
√
1− 11+η
+β η2
(1+η)(1+β +η)(35)
is the maximum value ofχ for which particles stick to
each other. Forχ 6 χ (2)c particles deform along the path
0 → δ pmax → δmax → δ0 → δmin → δc and then keep oscil-
lating with k2 stiffness,δc being one of the extrema of the

19
0.4 0.5 0.6 0.7 0.8 0.9 1 1.10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
χ=(vi/v
p)
δ c/δp m
ax
χ(1)c χ
(2)c
χ<1
χ>1
DEM simulated data
Fig. 10 Kinetic energy-free contact overlapδc plotted as a function of the scaled initial velocityχ = vivp
; the increasing branch corresponds toχ < 1,
while the decreasing branch corresponds toχ > 1. The dots are simulations forη = 4 andβ = 1, as in Fig. 9, which yieldsδ maxc
/δ pmax= (1/3)1/2
in Eq. (38).
oscillation, see Fig. 9(c). From Eq. (23e), applying conser-vation of energy alongδmin → δc, we get
12
mrv2f −
12
mrv20 =−1
2kcδminδ0+
12
kcδ 2c , (36a)
with vf = 0, and re-writing in terms ofkc andδ pmax leads to
δ (2)c
δ pmax
=
√
[
(kp− k1)2
kp(kp+ kc)− k2
1
kckp+
k1
kc
]
− mr
kc
v2i
(δ pmax)2
.
(36b)
In terms of the dimensionless parameters, this yields
δ (2)c
δ pmax
=
√
η2
(1+η)(1+β +η)+
ηβ (1+η)
− χ2
β=
χ√
β|e(2)n | ,
(37)
where|e(2)n | denotes the absolute value of the result from Eq.(28)
In Fig. 10, the evolution ofδc/δ pmax with χ is reported,
showing perfect agreement of the analytical expressions inEqs. (33) and (37), with the numerical solution of a pair-collision. In the sticking regime, the stopping overlap in-creases withχ , and reaches a maximum atχ = 1,
δ maxc
/δ pmax=
√
β η2−η −β −1β (1+η)(1+η+β )
(38)
which depends on the the adhesivityβ and the plasticityηonly. For χ > 1, dissipation gets weaker, relatively to theincreasing initial kinetic energy, andδ (2)
c/δ p
max decreases.
until it reaches 0 forχ = χ (2)c .
4.2 Dependence on Adhesivityβ
In the previous subsections, we studied the dependence ofthe coefficient of restitutionen on the scaled initial velocityχ for fixed adhesivityβ , whereas here the dependence ofen
onβ is analyzed.A special adhesivityβ ∗ can be calculated such thaten =
0 for χ = 1, which is the case of maximum dissipation andleads to sticking only at exactlyχ = 1. From Eq. (27), weget
1+β ∗+η −β ∗η2 = 0 , (39a)
so that
β ∗ =1
η −1. (39b)
In Fig. 11, we plot the coefficient of restitution as functionofthe scaled initial velocityχ for different values of adhesivityβ . Forβ < β ∗, in Fig. 11, the coefficient of restitutionen de-creases with increasingχ < 1, reaches its positive minimumat χ = 1, and increases forχ > 1. In this range, the particles(after collision) always have a non-zero relative separationvelocity vf . Whenβ = β ∗, en follows a similar trend, be-comes zero atχ = 1, and increases with increasing scaledinitial velocity for χ > 1. This is the minimum value of ad-hesivity for whichen can become zero and particles start tostick to each other. Forβ = β ∗, the two critical values coin-
cide,χ (1)c = χ (2)
c = 1. If β > β ∗, en decreases and becomes
zero atχ = χ (1)c < 1, it remains zero untilχ = χ (2)
c > 1, andfrom there increases with increasing initial velocity. Hence,we can conclude that the sticking of particles and then rangeof velocity for which this happens, is affected by material

20
0 0.5 1 1.5 2 2.50
0.2
0.4
0.6
0.8
1
β<β* β=β* β>β*
χ
e n
Fig. 11 Coefficient of restitutionen plotted against the scaled initial velocityχ . Different colors correspond to different adhesivityβ (red forβ < β ∗, green forβ = β ∗ and blue forβ > β ∗), with parametersk1 = 102, kp = 5×102, and differentkc (all in units of Nm−1), i.e. η = 4 and
β/β ∗ = 1/3, 1, and 3, withβ ∗ = 1/3. The dashed red line represents the solution with tuned newφ f′= 0.5 and newly calculatedkp
′, see Appendix
B .
properties of both particles. Indeed Zhou et al. [61] pre-sented similar conclusion about deposition efficiency in coldspray.
4.3 Effect of Viscosity
Since real physical systems also can have additional dissi-pation modes that are, e.g., viscous in nature, in this sec-tion we study the behavior of the collision when viscosityis present (γ0 > 0) and compare it with the non-viscous case(γ0 = 0). Note that any non-linear viscous damping force canbe added to the contact laws introduced previously, how-ever, for the sake of simplicity we restrict ourselves to thesimplest linear viscous law as given as second term in Eq.(3). In Fig. 12, we plot the contact force against the overlap,and the overlap against time, during collisions for a constantvalue ofχ = 1 and differentβ , for γ0 = 5×10−3.
Whenβ < β ∗, see Fig. 12(a) and Fig. 12(b), the contactends when the adhesive force−kcδ goes back to zero, forboth cases, with and without viscosity. This is since the vis-cosity is relatively small and does not contribute enough tothe total dissipation to make the particles stick.
For the critical adhesivityβ = β ∗, reported in Fig. 12(c),without viscosity the overlap between the particles still goesdown to exactly zero at the end of the collision, with all ki-netic energy dissipated. Forγ0 > 0, dissipation brings thismarginal collision case into the sticking regime and the par-ticles stay in contact atδ > 0. This can be seen clearly inFig. 12(d), where the particles undergo a damped oscillatorymotion with amplitude depending on the residual velocityvf
(the amplitude is very small due to small residual velocity).For larger valuesβ > β ∗, the overlap does not reach 0,
neither forγ0 = 0 nor for γ0 > 0, see Fig. 12(e). In both
cases, the particles stick and remain in contact with a fi-nite overlap. Without viscosity, the particles keep oscillat-ing along the slopek2, while in the case with viscosity theoscillation is damped and kinetic energy vanishes. Duringloading and unloading the apparent slope changes with timedue to the additional viscous force that leads to the dissi-pation of energy. Waiting long enough, for some oscillationcycles, the particles stick to each other with a finite overlapand zero relative kinetic energy. The difference is displayedin Fig. 12(f), where forγ0 = 0 the particles keep oscillat-ing with constant amplitude, whereas, forγ0 > 0, the parti-cles undergo a damped oscillatory motion, until the velocitybecomes 0 atδ > 0. The time evolution of the overlap inFig. 12(f) resembles that of the displacement evolution inRef. [13], where the authors studied sticking of particles inSaturn’s rings.2
4.4 Asymptotic Solutions
In this subsection, we focus on the caseχ ≤ 1, and studythe asymptotic behavior of the coefficient of restitution asfunction of the impact velocity.
For the sake of simplicity, let us start with an elasto-plastic system without adhesion, i.e.kc = 0, in Eq. (27) suchthat
e(1)n (η ,β = 0,χ < 1) =
√
11+ηχ
≈ (ηχ)−1/2 (40)
with the approximation valid forηχ ≫ 1. Since the scaledvelocity is moderate,χ < 1, the condition requires a large
2 In general, one could add a viscous law that is proportional to k2−k1 such that the jump-in viscous force in (e) at the beginning ofthecontact is not there, however, we do not go into this detail.

21
-0.01
0
0.01
0.02
0 5.10-5 10-4
f (N
)
δ (m)
β<β*
γ0=0γ0>0k1 δ-kc δkp (δ−δ0)
(a)
0
0.2
0.4
0.6
0.8
1
0 3.10-3 6.10-3 9.10-3
δ/δp m
ax
time(sec)
β<β*
γ0=0γ0>0
(b)
-0.01
0
0.01
0.02
0 5.10-5 10-4
f (N
)
δ (m)
β=β*
γ0=0γ0>0k1 δ-kc δkp (δ−δ0)
(c)
0
0.2
0.4
0.6
0.8
1
0 3.10-3 6.10-3 9.10-3
δ/δp m
ax
time(sec)
β=β*
γ0=0γ0>0
(d)
-0.01
0
0.01
0.02
0 5.10-5 10-4
f (N
)
δ (m)
β>β*
γ0=0γ0>0k1 δ-kc δkp (δ−δ0)
(e)
0
0.2
0.4
0.6
0.8
1
0 3.10-3 6.10-3 9.10-3
δ/δp m
ax
time(sec)
β>β*
γ0=0γ0>0
(f)
Fig. 12 (a), (c), (e) Contact forces plotted against overlap and (b), (d), (f) time evolution ofδ/δ pmax for pair collisions with parametersk1 = 102,
kp = 5×102 and differentkc = 10, 33.33, and 100, (units Nm−1), i.e. withη = 4, β < β ∗, β = β ∗ andβ > β ∗, for the same situations as shownin Fig. 11. The red and blue lines represent the data in the presence and absence of viscosity respectively, whereγ0 = 5×10−3, (unit Nm−1sec).

22
10−4
10−3
10−2
10−1
100
10−2
10−1
100
χ
e n
Increasing η
General EquationAsymptotic Fit
Fig. 13 The coefficient of restitution is plotted against the scaledinitial velocity χ in log-log-scale forβ = 0 and three values ofη = 5, 50, and500, with the other parameters as in Fig. 7. Red, green and blue circles denote, respectively, the solution of Eq. (40), while the solid lines representthe approximation for high scaled impact velocity and largeplasticityη ≫ 1.
plasticity, i.e., a strong difference between the limit stiffnessand the plastic loading stiffness,η ≫ 1 (orkp ≫ k1). In Fig.13, we plot the coefficient of restitution against the scaledinitial velocity χ for three different values ofη = kp/k1,together with the power law prediction of Eq. (40). We ob-serve, that for the smallestη (red circle and line), the ap-proximation is far from the data, while for higherη , theapproximation works well even for rather small velocitiesχ ≈ 0.1.
Next, when studying the elasto-plastic adhesive contactmodel,β > 0 andβ ≪ 1, again, we restrict ourselves to val-ues ofη such that asymptotic conditionηχ ≫ 1 is satisfied.Hence, Eq. (27) can be approximated as
e(1)n (η ,β ,χ < 1)≈√
1ηχ
−β , (41)
as long asηχ ≫ β ≥ 0 and 1η > β holds.
In Fig. 14, we plot the coefficient of restitution againstthe scaled initial velocityχ for different values ofβ andsuperimpose the approximation, Eq. (41). For smallβ andlargeχ , one observes good agreement between the full so-lution and the approximation. Differently, for the highestvalues ofβ the approximation is not valid. Due to the ad-hesive force, for largeχ , with increasingβ , the deviationfrom the χ−1/2 power law becomes increasingly stronger,leading to the sticking regime, as discussed in the previoussubsections. On the other hand, for smaller velocities, oneobserves a considerably smaller power-law, resembling thewell-known χ−1/4 power law for plastic contacts, as indi-cated by the dashed line in Fig. 14.
4.5 Dependence on interpolation
The choice of the interpolation rule for the unloading stiff-nessk2 in Eq. (26) is empirical. Therefore, forδmax/δ p
max<
1, a different choice could be:
k2(δmax) = k1(1+η√
χ) (42)
Inserting Eq. (42) into Eq. (22) leads to a different expres-
sion for the normal coefficient of restitutione(1)n , which forhigh values ofη√χ, and for smallβ , reduces to
en ∝√
η(χ)−1/4 . (43)
A similar power law prediction for moderate velocities hasbeen previously obtained by Thornton et al. in Ref. [48],using a non-linear Hertzian loading and unloading. Fig. 15shows the agreement between the power law approximationχ−1/4 and Eq. (22) with the alternative interpolation rule(42), for moderate velocities. The choice of different inter-polation laws fork2 shows the flexibility of the model andrequires input from experiments to become more realistic.The convexity of linear interpolation for zero cohesion isvery similar to that of lowβ in Fig. 11.
5 Conclusions
Various classes of contact models for non-linear elastic, ad-hesive and elasto-plastic particles, are reviewed in this paper.Instead of considering the well understood models for per-fect spheres of homogeneous (visco) elastic or elasto-plasticmaterials, here we focus on a special class of mesoscopicadhesive elasto-plastic models, aimed to describe the over-all behavior of assemblies of realistic (different from perfecthomogeneous spheres) fine particles.

23
10−4
10−3
10−2
10−1
100
10−1
100
χ
e n Increasing β
Fig. 14 Log-log plot of the coefficient of restitution against the scaled initial velocityχ for four different values ofβ = 0.01, 0.1, and 1.0,with η = 50. Red, green and blue circles denote the respective solutions of the general equation, Eq. (27), solid black line represents power lawen ∼ v−1/4, while magenta line denotesen ∼ v−1/2.
10−4
10−3
10−2
10−1
100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
χ
e n
Linear Interpolation
χ−1/2
Squareroot Interpolation
χ−1/4
Fig. 15 Semi-log plot of the coefficient of restitution as function of the scaled initial velocityχ , using different interpolation rules fork2, for paircollisions withη = 50 andβ = 0. The symbols denote the solutions of the general equation,Eq. (40) with linear interpolation (red circles) orsquare root interpolation (blue circles), as given in Eq. (42). The red and blue solid lines represent the approximations for high impact velocityen ∼ χ−1/2 anden ∼ χ−1/4.
The contact model by Luding [25] is extended and gen-eralized by adding short-ranged (non-contact) interactions,the model is critically discussed and compared to alterna-tive models. The influence of the model parameters on theoverall impact behavior is discussed, focusing on the irre-versible, adhesive, elasto-plastic part of the model and com-bining all the elements (non-contact, hysteretic contact andviscous) at the end. The model is simple yet it catches theimportant features of particle interactions that affect the bulkbehavior of a granular assembly, like elasticity, plasticityand contact adhesion. It is mesoscopic in spirit, i.e. it doesnot resolve all the details of every single contact, but it isde-signed to represent the ensemble of many contacts in a bulksystem. The goal is to propose a rich, flexible and multi-
purpose granular matter model, which is realistic and ableto involve large numbers of particles.
When the dependence of the coefficient of restitution,e,on the relative velocity between particles is analyzed, twosticking regimes,e= 0, show up. These are related to differ-ent sources of dissipation in the system.
(i) As previously reported in the literature (see e.g. Refs.[4,9,17,42,48]) the particles stick to each other at very lowimpact velocity. This can happen due to irreversible short-range non-contact interaction. The threshold velocity, belowwhich the particles stick, is directly related to the magni-tude of the non-contact adhesive forcefa. (ii) With increas-ing velocity,e increases and then decreases until a the sec-ond sticking regime is reached. This is a result of the plas-

24
tic/adhesive dissipation mechanisms in the hysteretic con-tact model.
At small impact velocity, the details of the contact modelare of minor importance. At higher velocities, for a suffi-ciently low value of fa the contribution of the (irreversible)non-contact forces can be neglected. In the limit of weakfa and for moderate-high velocities, the contact componentof the coefficient of restitutionen is examined analyticallyusing simple energy conservation arguments.
The results are derived in a closed analytical form, byphrasing the behavior in terms of dimensionless parameters(plasticity, adhesivity and initial velocity) and the range ofimpact velocities of the second sticking regime is predicted.
For still increasing relative velocity, beyond the stick-ing region,en starts increasing again. This regime involvesa change of the physical behavior of the system. and resem-bles for example to material with an elastic core like asphalt(stone with bitumen layer). On the other hand completelyplastic behavior can be reproduced by the same model with-out any change, instead just by tuning two input parame-terskp andφ f , such that low velocity collision dynamics iskept unaffected but the maximal plastic overlap is reached atmuch higher impact velocities. This modification providesthe high velocity sticking regime for a wider range of veloc-ity, as expected for plastic material. The existence of highvelocity rebound, as predicted by our model, has been ob-served experimentally and numerically in cold spray [41,43,60–62].
In the sticking regime, due to the lack of dissipation onthe unloading / reloading branch the sticking particles os-cillate around their equilibrium position. However, the realcollision between two-particles is viscous in nature. Sinceviscosity hinders analytical solutions, a few simulation re-sults with viscosity are presented. With viscosity, the un-loading/reloading is not reversible elastic anymore. Thuswithtime the particles undergo a damped oscillation and approacha static contact with finite overlap.
In the last part of the paper a section is dedicated to theasymptotic behavior ofen at high impact velocities. We ob-serve that the asymptotic behavior is directly related to thechoice of the interaction law and its details. For low ad-hesivity, the coefficient of restitution is found to decay asen ∼ vi
−1/2, which is directly related to the empirical choiceof the unloading stiffness in the model. Further analysis onthis feature is possible in the future, when new data frommodern experimental techniques involving fine powders orcore-shell materials will be available for numerical calibra-tion and validation.
The application of the present extended model to many-particle systems (bulk behavior) is the final long-term goal,see Ref. [26] as an example where the non-contact forceswere disregarded. An interesting question that remains unan-swered concerns a suitable analogy to the coefficient of resti-
tution (as defined for pair collisions) relevant in the case ofbulk systems, where particles can be permanently in con-tact with each other over long periods of time, and whereimpacts are not the dominant mode of interaction.
The interest of widely different communities viz. granu-lar physics, particle technology, asphalt or cold-spray inthedependence of restitution coefficient/deposition efficiencyon impact velocity is considerable. We hope our study helpsto connect these widely different communities by providingan overview and in particular a flexible multi-purpose con-tact model valid in many practically relevant situations.
6 Acknowledgment
Helpful discussions with N. Kumar and T. Weinhart are ap-preciated. We thank T. Weinhart for careful and critical read-ing of the manuscript. Insightful discussions with Prof. ShuiqingLi are also appreciated. We also thank Prof. Hidekazu Tanakafor some very helpful discussion. We would also like tothank the referees for their constructive criticism and com-ments that helped us to hugely improve the manuscript.
Financial support (project number: 07CJR06) from a re-search program “Jamming and Rheology” of the Stichtingvoor Fundamenteel Onderzoek der Materie (FOM), which isfinancially supported by the “Nederlandse Organisatie voorWetenschappelijk Onderzoek” (NWO), is acknowledged.
A Energy Picture
This appendix shows the energies of two particles during contact, wherethe difference between the different branches of the contact model,namely irreversible/unstable or reversible/elastic, will be highlighted.
In Fig. 16, the time-evolution of kinetic and potential energy isshown; the graphs can be viewed in parallel to Figs. 9(a) and 9(b).In Fig. 16(a), we plot the kinetic and potential energy of theparti-
cles against time for low initial velocityχ < χ (1)c , corresponding to
Fig. 9(a), for which dissipation is so weak that particles donot stick.The kinetic energy decreases from its initial value and is converted topotential energy (the conversion is complete atδmax). Thereafter, thepotential energy drops due to the change between the loadingand un-loading slope fromk1 to k2. The potential energy decreases to zero (atthe force-free overlapδ0), where it is converted to (less) kinetic energy.Then the kinetic energy decreases further due to the acting adhesiveforce. Atδmin the increasing potential energy drops to a negative valuedue to the change in unloading slope fromk2 to the adhesive (instable)slope−kc. From there it increases from this minimum, negative valueto zero, forδ = 0. From here the kinetic energy remains constant andthe potential energy stays at zero, since the particles are separated.
In Fig. 16(b), we plot the time evolution of kinetic and potentialenergy that the particles would have if un-/re-loading would take placeat that moment, along the branch with slopek2, namely the available(elastic) potential energy. This energy increases from zero att = 0, andreaches a maximum when the kinetic energy becomes zero (notethatit is not equal to the initial kinetic energy due to the plastic change ofslope ofk2.) Thereafter, the available potential energy decreases tozeroat the force-free overlapδ0. For further unloading, the available poten-tial energy first increases and then drops rapidly on the unstable branch

25
-4.10-9
0
5.10-9
1.10-8
1.5.10-8
2.10-8
2.510-8
0 0.0005 0.001 0.0015 0.002
Ene
rgy
(J)
time(sec)
χ<χ(1)c
δmax
δ0
δmin
Potential EnergyKinetic Energy
(a)
-4.10-9
0
5.10-9
1.10-8
1.5.10-8
2.10-8
2.510-8
0 0.0005 0.001 0.0015 0.002
Ene
rgy
(J)
time(sec)
χ<χ(1)c
δmax
δ0
δmin
Potential EnergyKinetic Energy
(b)
-3.10-8
0
3.10-8
6.10-8
9.10-8
1.2.10-7
0 0.0005 0.001 0.0015 0.002
Ene
rgy
(J)
time (sec)
χ(1)c<χ<χ(2)
c
δmax
δ0
δmin
δc
Potential EnergyKinetic Energy
(c)
-3.10-8
0
3.10-8
6.10-8
9.10-8
1.2.10-7
0 0.0005 0.001 0.0015 0.002
Ene
rgy
(J)
time (sec)
χ(1)c<χ<χ(2)
c
δmax
δ0
δmin
δc
Potential EnergyKinetic Energy
(d)
Fig. 16 (a,c) Kinetic and (irreversible, plastic, “potential”) energy of the particles, and (b,d) kinetic and available (elastic) potential energy (forre-loading) of the particles, plotted against time for paircollisions withk1 = 102 Nm−1. kp = 5×102 Nm−1, andkc = 102 Nm−1, i.e. η = 4 andβ = 1. The initial velocityχ is χ = 0.34 (a,b) andχ = 0.69 (c,d), in the regimes defined in the inset of each plot.
with slope−kc. The change in sign of the unloading slope, fromk2 to−kc, is reflected in the kink in the curve atδmin. Note, that comparingFigs. 16(a) and 16(b), the available potential energy always stays posi-tive, while the total, plastic “potential” energy drops to negative valuesafter the kink atδmin.
Figs. 16(c) and 16(d) show the time evolution of kinetic and po-tential energy (total and available, respectively) for an initial velocity
χ (1)c < χ < χ (2)
c in the sticking regime, see Fig. 9(b). In Fig. 16(c), asimilar trend as that of Fig. 16(a) is observed until the potential energybecomes negative atδmin. The difference to the case of smaller impactvelocity is that at this point, the kinetic energy is less than the mag-nitude of the negative potential energy and hence first reaches zero,i.e., the particles stick. At this point, the (plastic) potential energy in-creases and jumps to a positive value indicating the change in sign ofthe unloading slope from−kc to k2. Finally, it oscillates between thispositive value atδc, exchanging energy with the kinetic degree of free-dom. When the available potential energy is plotted in Fig. 16(d), a
similar trend as that of Fig. 16(b) is observed up to the kink at δmin.Here, the two energies have comparable values when they reach δminand the kinetic energy decreases to zero with a non-zero available po-tential energy, which causes the contact to re- and un-load alongk2.
B Possible tuning of model parameters to increase theplastic range
We assume that the reference dimensionless plasticity depth be φ f ,which is e.g. calculated based on the maximal volume fraction re-lated arguments of a multi-particle assembly, andkp be the reference
limit stiffness. We propose a newφ f′
which represents the new di-mensionless plasticity depth (our choice or calculated based on an-other volume fraction) and a new value ofkp
′such that the tuned
model resembles the reference forδ0 < a12φ f and becomes plastic for

26
a12φ f < δ0 < a12φ f′. At δ0 = a12φ f , with a12 being reduced radius,
Eq. (12) reads
kp = k2 = k1+(kp′ −k1)δ p
max/δ pmax
′(B.1)
Since all parameters exceptφ f andkp remain unchanged. Using thisdefinition in Eq. (12) we arrive at
(kp−k1)2
kpφ f=
(kp′−k1)
2
kp′φ f
′ , (B.2)
which gives the new limit stiffness
kp′=
2k1+AB+√
(AB)2+4k1AB2
, (B.3)
whereA=(kp−k1)
2
kpandB=
φ f′
φ f
Using Eq. (B.3), we can calculate values of the new limit plasticstiffnesskp
′for any givenφ f
′, such that the collision dynamics for
lower plastic deformationδ0 < δ p0 is intact, while the range of plastic
deformation is enhanced, depending on the chosenφ f′> φ f .
References
1. M. P. Allen and D. J. Tildesley.Computer Simulation of Liquids.Oxford University Press, Oxford, 1987.
2. Y. M. Bashir and J. D. Goddard. A novel simulation method forthe quasi-static mechanics of granular assemblages.J. Rheol.,35(5):849–885, 1991.
3. L. Brendel, J. Torok, R. Kirsch, and U. Brockel. A contact modelfor the yielding of caked granular materials.Granular Matter,13(6):777–786, 2011.
4. N. V. Brilliantov, N. Albers, F. Spahn, and T. Poschel. Colli-sion dynamics of granular particles with adhesion.Phys. Rev. E,76:051302, Nov 2007.
5. N. V. Brilliantov and T. Poschel.Collision of Adhesive Viscoelas-tic Particles. Wiley VCH, 2005.
6. N. V. Brilliantov, F. Spahn, J. M. Hertzsch, and T. Poschel. Modelfor collisions in granular gases.Phys. Rev. E, 53(5):5382, 1996.
7. P. A. Cundall and O. D. L. Strack. A discrete numerical model forgranular assemblies.Geotechnique, 29(1):47–65, 1979.
8. B. Dahneke. The influence of flattening on the adhesion of parti-cles.Journal of Colloid and Interface Science, 40(1):1 – 13, 1972.
9. B. Dahneke. Measurements of bouncing of small latex spheres.Journal of Colloid and Interface Science, 45(3):584 – 590, 1973.
10. B. Dahneke. Further measurements of the bouncing of small latexspheres.Journal of Colloid and Interface Science, 51(1):58 – 65,1975.
11. B. Derjaguin, V. Muller, and Y. Toporov. Effect of contact de-formations on the adhesion of particles.Journal of Colloid andInterface Science, 53(2):314 – 326, 1975.
12. G. Haiat, M. P. Huy, and E. Barthel. The adhesive contact of vis-coelastic spheres.Journal of the Mechanics and Physics of Solids,51(1):69 – 99, 2003.
13. A. P. Hatzes, F. Bridges, D. N. C. Lin, and S. Sachtjen. Coagu-lation of particles in saturn’s rings: Measurements of the cohesiveforce of water frost.Icarus, 89(1):113 – 121, 1991.
14. S. Herminghaus. Dynamics of wet granular matter.Advances inPhysics, 54(3):221–261, 2005.
15. H. J. Herrmann, J.-P. Hovi, and S. Luding, editors.Physics ofdry granular media - NATO ASI Series E 350, Dordrecht, 1998.Kluwer Academic Publishers.
16. R. Jasevicius, R. Kacianauskas, and J. Tomas. Simulation of nor-mal impact of micron-sized particle with elastic-plastic contact.Journal of Vibroengineering, 11(1):6–16, 2009.
17. R. Jasevicius, J. Tomas, and R. Kacianauskas. Simulation of nor-mal impact of ultrafine silica particle on substrate.ParticulateScience and Technology, 29(2):107–126, 2011.
18. K. L. Johnson.Contact Mechanics. Cambridge Univ. Press, Cam-bridge, 1989.
19. K. K. Johnson K. L and R. A. D. Surface energy and the contactof elastic solids.Proc. R. Soc. Lond. A, 324(1558):301–313, 1971.
20. G. Kuwabara and K. Kono. Restitution coefficient in a colli-sion between two spheres.Japanese Journal of Applied Physics,26(8):1230–1233, 1987.
21. M. Latzel, S. Luding, H. J. Herrmann, D. W. Howell, and R.P.Behringer. Comparing simulation and experiment of a 2d granularcouette shear device.Eur. Phys. J. E, 11(4):325–333, 2003.
22. S. Li, J. S. Marshall, G. Liu, and Q. Yao. Adhesive particulateflow: The discrete-element method and its application in energyand environmental engineering.Progress in Energy and Combus-tion Science, 37(6):633 – 668, 2011.
23. S. Luding. Collisions & contacts between two particles.In H. J.Herrmann, J.-P. Hovi, and S. Luding, editors,Physics of dry gran-ular media - NATO ASI Series E350, page 285, Dordrecht, 1998.Kluwer Academic Publishers.
24. S. Luding. Particulate solids modeling with discrete element meth-ods. In P. Massaci, G. Bonifazi, and S. Serranti, editors,CHoPS-05CD Proceedings, pages 1–10, Tel Aviv, 2006. ORTRA.
25. S. Luding. Cohesive, frictional powders: contact models for ten-sion. Granular Matter, 10:235–246, 2008.
26. S. Luding and F. Alonso-Marroqun. The critical-state yield stress(termination locus) of adhesive powders from a single numericalexperiment.Granular Matter, 13:109–119, 2011.
27. S. Luding, E. Clement, A. Blumen, J. Rajchenbach, and J.Duran.Anomalous energy dissipation in molecular dynamics simulationsof grains: The “detachment effect”.Phys. Rev. E, 50:4113, 1994.
28. S. Luding and H. J. Herrmann. Micro-macro transition forco-hesive granular media. in: Bericht Nr. II-7, Inst. fur Mechanik,Universitat Stuttgart, S. Diebels (Ed.), 2001.
29. S. Luding, K. Manetsberger, and J. Muellers. A discrete modelfor long time sintering.Journal of the Mechanics and Physics ofSolids, 53(2):455–491, 2005.
30. O. Molerus. Theory of yield of cohesive powders.Powder Tech-nology, 12(3):259 – 275, 1975.
31. O. Molerus. Effect of interparticle cohesive forces on the flowbehaviour of powders.Powder Technology, 20:161–175, 1978.
32. A. Moridi, S. Hassani-Gangaraj, and M. Guagliano. A hybrid ap-proach to determine critical and erosion velocities in the cold sprayprocess, 2013. in press.
33. P. Muller, D. Krengel, and T. Poschel. Negative coefficient ofnormal restitution.Phys. Rev. E, 85:041306, 2012.
34. T. Ormel, V. Magnanimo, H. H. ter, and S. Luding. Modelingof asphalt and experiments with a discrete particles method. InConference Proceedings MAIREPAV7 2012, 2012.
35. M. Pasha, S. Dogbe, C. hare abd A. Hassanpour, and M. Ghadiri,2013. Under review.
36. A.-S. Persson and G. Frenning. An experimental evaluation of theaccuracy to simulate granule bed compression using the discreteelement method.Powder Technology, 219(0):249 – 256, 2012.
37. T. Poschel and T. Schwager.Computational Granular Dynamics -Models and Algorithms. Springer, Berlin, Heidelberg, New York,2005.
38. D. C. Rapaport.The Art of Molecular Dynamics Simulation. Cam-bridge University Press, Cambridge, 1995.
39. Y. Rozenblat, A. Levy, H. Kalman, and J. Tomas. Impact velocityand compression force relationship equivalence function.PowderTechnology, 235(0):756 – 763, 2013.
40. K. Saitoh, A. Bodrova, H. Hayakawa, and N. V. Brilliantov. Nega-tive normal restitution coefficient found in simulation of nanoclus-ter collisions.Phys. Rev. Lett., 105:238001, 2010.

27
fn = fhys
δδpmax
kp
k1
−kc
δp′max
kp′
Fig. 17 Force-displacement law for elasto-plastic, adhesive contacts superimposed on the irreversible contact force law. The black solid linerepresents the force law for reference input parametersφ f andkp, while the dashed red line represents the same for a new chosen φ f
′and newly
calculatedkp′resembling a wider plastic regime of the particle deformation.
41. T. Schmidt, F. Grtner, H. Assadi, and H. Kreye. Development ofa generalized parameter window for cold spray deposition.ActaMaterialia, 54(3):729 – 742, 2006.
42. C. Sorace, M. Louge, M. Crozier, and V. Law. High apparentad-hesion energy in the breakdown of normal restitution for binaryimpacts of small spheres at low speed.Mechanics Research Com-munications, 36(3):364 – 368, 2009.
43. T. V. Steenkiste, J. Smith, R. Teets, J. Moleski, D. Gorkiewicz,R. Tison, D. Marantz, K. Kowalsky, W. R. II, P. Zajchowski, B.Pil-sner, R. McCune, and K. Barnett. Kinetic spray coatings.Surfaceand Coatings Technology, 111(1):62 – 71, 1999.
44. H. Tanaka, K. Wada, T. Suyama, and S. Okuzumi. Growth ofcosmic dust aggregates and reexamination of particle interactionmodels. Progress of Theoretical Physics Supplement, 195:101–113, 2012.
45. S. C. Thakur, J. Sun, J. Y. Ooi, and H. Ahmadian. An experimentaland numerical study of compression and shear behaviour of deter-gent powders. In7th International Conference on Conveying andHandaling of Particulate Solids, 2012.
46. C. Thornton. Numerical simulations of deviatoric sheardeforma-tion of granular media.Geotechnique, 50(1):43–53, 2000.
47. C. Thornton, S. J. Cummins, and P. W. Cleary. An investigationof the comparative behaviour of alternative contact force modelsduring elastic collisions.Powder Technology, 210(3):189 – 197,2011.
48. C. Thornton and Z. Ning. A theoretical model for the stick/bouncebehaviour of adhesive, elastic-plastic spheres.Powder Technol-ogy, 99(2):154 – 162, 1998.
49. C. Thornton and K. K. Yin. Impact of elastic spheres with andwithout adhesion.Powder Technol., 65:153, 1991.
50. C. Thornton and L. Zhang. A DEM comparison of different sheartesting devices. In Y. Kishino, editor,Powders & Grains 2001,pages 183–190, Rotterdam, 2001. Balkema.
51. J. Tomas. Particle adhesion fundamentals and bulk powder con-solidation.KONA, 18:157–169, 2000.
52. J. Tomas. Assessment of mechanical properties of cohesive par-ticulate solids. part 1: Particle contact constitutive model. Partic-ulate Science and Technology: An International Journal, 19:95–110, 2001.
53. J. Tomas. Assessment of mechanical properties of cohesive par-ticulate solids. part 2: Powder flow criteria.Particulate Scienceand Technology: An International Journal, 19:111–129, 2001.
54. J. Tomas. Adhesion of ultrafine particlesa micromechanical ap-proach.Chemical Engineering Science, 62(7):1997 – 2010, 2007.
55. J. Tomas and S. Kleinschmidt. Improvement of flowabilityof finecohesive powders by flow additives.Chemical Engineering andTechnology, 32(10):1470–1483, 2009.
56. P. A. Vermeer, S. Diebels, W. Ehlers, H. J. Herrmann, S. Luding,and E. Ramm, editors.Continuous and Discontinuous Modellingof Cohesive Frictional Materials, Berlin, 2001. Springer. LectureNotes in Physics 568.
57. L. Vu-Quoc and X. Zhang. An elastic contact force-displacementmodel in the normal direction: displacement-driven version. Proc.R. Soc. Lond. A, 455:4013–4044, 1999.
58. H.-C. W. Wall S., Walter J. and G. L. S. Measurements of kineticenergy loss for particles impacting surfaces.Aerosol Science andTechnology, 12(4):926 – 946, 1990.
59. O. R. Walton and R. L. Braun. Viscosity, granular-temperature,and stress calculations for shearing assemblies of inelastic, fric-tional disks.J. Rheol., 30(5):949–980, 1986.
60. J. Wu, H. Fang, S. Yoon, H. Kim, and C. Lee. The reboundphenomenon in kinetic spraying deposition.Scripta Materialia,54(4):665 – 669, 2006.
61. Z. Xianglin, W. Xiangkun, W. Jianguo, and J. Zhang. Numeri-cal investigation of the rebounding and the deposition behavior ofparticles during cold spraying.Acta Metallurgica Sinica(Englishletters), 24(1):43, 2011.
62. D. Zhang, P. Shipway, and D. McCartney. Cold gas dynamicspraying of aluminum: The role of substrate characteristics in de-posit formation. Journal of Thermal Spray Technology, 14:109–116, 2005.

28
63. X. Zhang and L. Vu-Quoc. Simulation of chute flow of soybeansusing an improved tangential force-displacement model.Mechan-ics of Materials, 32:115–129, 2000.
64. X. Zhang and L. Vu-Quoc. Modeling the dependence of the co-efficient of restitution on the impact velocity in elasto-plastic col-lisions. International Journal of Impact Engineering, 27(3):317–341, 2002.