-
8/20/2019 (Mergue With Nallayarasu PDF)
1/11
EJSE Special Issue: Loading on Structures (2007)
1 INTRODUCTION
The analysis, design and construction of offshorestructures is
arguably one of the most demandingsets of tasks faced by the
engineering profession.Over and above the usual conditions and
situationsmet by land-based structures, offshore structureshave the
added complication of being placed in an
ocean environment where hydrodynamic interactioneffects and
dynamic response become major consid-erations in their design. In
addition, the range of
possible design solutions, such as: ship-like
FloatingProduction Systems, (FPSs), and Tension Leg Plat-form (TLP)
deep water designs; the more traditional
jacket and jack-up (space truss like) oil rigs; and
thelarge member sized gravity-style offshore platformsthemselves
(see Fig. 1), pose their own peculiar de-
mands in terms of hydrodynamic loading effects,foundation
support conditions and character of thedynamic response of not only
the structure itself butalso of the riser systems for oil
extraction adopted
by them. Invariably, non-linearities in the descrip-tion
of the hydrodynamic loading characteristics ofthe structure-fluid
interaction and in the associatedstructural response can assume
importance and need
be addressed. Access to specialist modelling soft-ware is
often required to be able to do so.
This paper provides a broad overview of some ofthe key factors
in the analysis and design of offshorestructures to be considered
by an engineer uniniti-ated in the field of offshore engineering.
Referenceis made to a number of publications in which furtherdetail
and extension of treatment can be explored bythe interested reader,
as needed.
Figure1: Sample offshore structure designs
Introduction to the Analysis and Design of Offshore Structures–
AnOverview
N. HaritosThe University of Melbourne, Australia
ABSTRACT: This paper provides a broad overview of some of the
key factors in the analysis and design ofoffshore structures to be
considered by an engineer uninitiated in the field of offshore
engineering. Topicscovered range from water wave theories,
structure-fluid interaction in waves to the prediction of extreme
val-ues of response from spectral modeling approaches. The
interested reader can then explore these topics in
greater detail through a number of key references listed in the
text.
55
-
8/20/2019 (Mergue With Nallayarasu PDF)
2/11
EJSE Special Issue: Loading on Structures (2007)
2 OFFSHORE ENGINEERING BASICS
A basic understanding of a number of key subjectareas is
essential to an engineer likely to be involvedin the design of
offshore structures, (Sarpkaya &Isaacson, 1981; Chakrabarti,
1987; Graff, 1981;DNS-OS-101, 2004).
These subject areas, though not mutually exclu-sive, would
include:
• Hydrodynamics• Structural dynamics• Advanced structural
analysis techniques• Statistics of extremes
amongst others.In the following sections, we provide an
overview
of some of the key elements of these topic areas, byway of an
introduction to the general field of off-shore engineering and the
design of offshore struc-
tures.
2.1 Hydrodynamics
Hydrodynamics is concerned with the study of waterin motion. In
the context of an offshore environ-ment, the water of concern is
the salty ocean. Its mo-tion, (the kinematics of the water
particles) stemsfrom a number of sources including slowly
varyingcurrents from the effect of the tides and from localthermal
influences and oscillatory motion from waveactivity that is
normally wind-generated.
The characteristics of currents and waves, them-selves would be
very much site dependent, with ex-treme values of principal
interest to the LFRD ap-
proach used for offshore structure design, associatedwith
the statistics of the climatic condition of the siteof interest,
(Nigam & Narayanan: Chap. 9, 1994).
The topology of the ocean bottom also has an in-fluence on the
water particle kinematics as the waterdepth changes from deeper to
shallower conditions,(Dean & Dalrymple, 1991). This influence
is re-ferred to as the “shoaling effect”, which assumes
significant importance to the field of coastal engi-neering. For
so-called deep water conditions (wherethe depth of water exceeds
half the wavelength ofthe longest waves of interest), the influence
of theocean bottom topology on the water particle kine-matics is
considered negligible, removing an other-wise potential
complication to the description of thehydrodynamics of offshore
structures in such deepwater environments.
A number of regular wave theories have been de-veloped to
describe the water particle kinematics as-sociated with ocean waves
of varying degrees ofcomplexity and levels of acceptance by the
offshoreengineering community, (Chakrabarti, 2005). Thesewould
include linear or Airy wave theory, Stokessecond and other higher
order theories, Stream-
Function and Cnoidal wave theories, amongst oth-ers, (Dean &
Dalrymple, 1991).
The rather confused irregular sea state associatedwith storm
conditions in an ocean environment is of-ten modelled as a
superposition of a number of Airywavelets of varying amplitude,
wavelength, phaseand direction, consistent with the conditions at
the
site of interest, (Nigam & Narayanan, Chap. 9,1994).
Consequently, it becomes instructive to de-velop an understanding
of the key features of Airywave theory not only in its context as
the simplest ofall regular wave theories but also in terms of its
rolein modelling the character of irregular ocean seastates.
2.1.1 Airy Wave TheoryThe surface elevation of an
Airy wave of amplitudea, at any instance of time
t and horizontal position x
in the direction of travel of the wave, is denoted by),(
t xη and is given by:
( )t xat x κ η −=
cos),( (1)
where wave number L/2π κ = in which
L repre-sents the wavelength (see Fig. 2) and circular
fre-quency T /2π = in which T represents the
periodof the wave. The celerity, or speed, of the wave
C isgiven by L/T or
ω / κ , and the crest to trough
wave-height, H , is given by 2a.
Figure 2: Definition diagram for an Airy wave
The alongwave ),( t xu and vertical ),(
t xv water particle velocities in an Airy
wave at position z
measured from the Mean Water level (MWL) indepth of water
h are given by:
( )( )( )
( )t xh
h zat xu ω κ
κ
κ −
+= cos
sinh
cosh),( (2)
( )( )( )
( )t xh
h zat xv ω κ
κ
κ −
+= sin
sinh
sinh),( (3)
The dispersion relationship relates wave numberκ to
circular frequency ω (as these are not inde-
pendent), via:
( )hg κ κ ω tanh2 = (4)
56
-
8/20/2019 (Mergue With Nallayarasu PDF)
3/11
-
8/20/2019 (Mergue With Nallayarasu PDF)
4/11
EJSE Special Issue: Loading on Structures (2007)
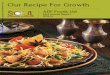
in which f p = 1.37/ 5.19U , is the
frequency in Hertzat peak wave energy in the spectrum and where
2
19.50.021U4 == η σ s H .
(Note that the variance ofa random process can be directly obtained
fromthe area under its spectral density variation,hence the basis
for the relationship for
2
19.50.005U≈η σ , from the P-M spectral descrip-tion
quoted above). Figure 4 depicts sample plotsof the
Pierson-Moskowitz (P-M) spectrum for aselection of wind speed
values, 5.19U .
0
20
40
60
80
100
0 0.05 0.1 0.15 0.2 0.25
Frequency (Hertz)
S p e c t r a l D e n s i t y
U = 20m/s
U = 18m/s
U = 16m/s
U = 12m/sU = 10m/s
Figure 4: Sample Pierson-Moskowitz Wave Spectra
An irregular sea state can be considered to becomposed of a
Fourier Series of Airy wavelets con-forming to a nominated spectral
description, such asthe P-M spectral variation.
Then wave height )(t η can be expressed as
∑=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ ⎟ ⎠
⎞⎜⎝
⎛ −=2/
0
2sin
)(.2)(
N
n
nT
nt
T
f S t φ
π η
η (12)
where η(t) is represented by a series of points (η1,η2, η3, …,
ηM) at a regular time step of dt for M points where T = M.dt
here represents the timelength of record, and φn is a random
phase angle be-tween 0 and 2π. (Equation (12) offers a
convenientapproach towards numerically simulating sea states
conforming to a desired spectral variation via theFast Fourier
Transform. Such sea state descriptionscan then be adopted in
numerical studies that takeinto account non-linear characteristics
and featuresthat would otherwise not be considered for
conven-ience).
3 ENVIRONMENTAL LOADS ON OFFSHORESTRUCTURES
3.1 Wind Loads
Wind loads on offshore structures can be evaluatedusing
modelling approaches adopted for land-basedstructures but for
conditions pertaining to ocean en-vironments. The distinction here
is that an open sea presents a lower category of roughness to
the free-
stream wind, which leads to a more slowly varyingmean wind
profile with height and to lower levels ofturbulence intensity than
encountered on land. As aconsequence, wind speed values at the same
heightabove still water level (for offshore conditions) asthose
above ground level (for land-based structures)for nominal storm
conditions, tend to be stronger
and lead to higher wind loads. (Figure 5 provides adiagrammatic
representation of this mean windspeed variation).
250m
300m
400m500m
Figure 5: Variation of mean wind speed with height
For free-stream wind speed, U G, at
gradientheight, zG (the height outside the influence of
rough-ness on the free-stream velocity), the mean windspeed at
level z above the surface, )( zU , is given bythe power
law profile
G
ref
ref
G
G U z
zU
z
zU zU ≤⎟
⎟ ⎠
⎞⎜⎜⎝
⎛ =⎟⎟
⎠
⎞⎜⎜⎝
⎛ =
α α
)( (13)
where α is the power law exponent and “ref” refersto
a reference point typically chosen to correspond
to 10m.Table I compares values for key descriptive pa-
rameters, α and zG, for different terrain
conditions,including those for rough seas.
Table I Wind speed profile parameters
Terrain Rough Sea Grassland Suburb City centre
α 0.12 0.16 0.28 0.40
zG (m) 250 300 400 500
The drag force, )(t F W , exerted on a bluff
body
(eg such as the exposed frontal deck area of an off-shore oil
rig), by turbulent wind pressure effects can be evaluated
from
)(2
1)( 2 t AV C t F DaW
ρ = (14)
where a ρ is the density of air (1.2 kg/m3),
A is the
exposed area of the bluff body, C D is the drag
coef-ficient associated with the bluff bodyshape/geometry, and
V(t) is wind speed at the loca-tion of the bluff body.
3.2
Wave Loads
The wave loads experienced by offshore struc-tural elements
depend upon their geometry, (the size
58
-
8/20/2019 (Mergue With Nallayarasu PDF)
5/11
EJSE Special Issue: Loading on Structures (2007)
2.5 3 4 5 6 7 8 9 10 15 20 30 40 50 100 150 200
0.4
0.3
0.5
1.0
1.5
3.0
2.0 Re x 10-3
KC
CM
2.5 3 4 5 6 7 8 9 10 15 20 30 40 50 100 150 200
0.4
0.3
0.5
1.0
1.5
3.0
2.0 Re x 10-3
KC
CM
2.5 3 4 5 6 7 8 9 10 15 20 30 40 50 100 150 200
0.4
0.3
0.5
1.0
1.5
3.0
2.0 Re x 10-3
KC
CD
2.5 3 4 5 6 7 8 9 10 15 20 30 40 50 100 150 200
0.4
0.3
0.5
1.0
1.5
3.0
2.0 Re x 10-3
KC
CD
of these elements relative to the wavelength andtheir
orientation to the wave propagation), the hy-drodynamic conditions
and whether the structuralsystem is compliant or rigid. Structural
elements thatare large enough to deflect the impinging wave
(di-ameter to wavelength ratio, D/L > 0.2) undergo
load-ing in the diffraction regime, whereas smaller, more
slender, structural elements are subject to loading inthe
Morison regime.
3.2.1 Morison’s EquationThe alongwave or in-line
force per unit length
acting on the submerged section of a rigid
verticalsurface-piercing cylinder, ),( t z f
, from the interac-tion of the wave kinematics at position z from
theMWL, (see Fig. 6), is given by Morison’s equation,viz:
),(),(),(
t z f t z f t z f
D I += (15)
where ( ) ),(4/),( 2
t zu DC t z f
M I ρ π =
and),(),(5.0),(
t zut zu DC t z f
D D ρ = represent the iner-
tia and drag force contributions in which
C M and C D
represent the inertia and drag force coefficients, re-
spectively, ρ is the density of sea water
and D is the
cylinder diameter.
Figure 6: Wave Loading on a Surface-Piercing Bottom-Mounted
Cylinder
Force coefficients C M and
C D are found to be de-
pendent upon Reynold’s number, Re,
Keulegan-Carpenter number, KC , and
the β parameter, viz:
KC
Re
D
T uKC m == β ; (16)
where um = the maximum alongwave water particlevelocity. It
is found that for KC < 10, inertia
forces progressively dominate; for 10 < KC <
20 both iner-
tia and drag force components are significant and
forKC > 20, drag force progressively
dominates.Sarpkaya’s (1976) original tests conducted on in-
strumented horizontal test cylinders in a U-tube witha
controlled oscillating water column remain to bethe most
comprehensive exploration of Morisonforce coefficients in the
published literature.
Figures 7 and 8, derived from these results pro-vide an
indication of the variation of these force co-efficients with
respect to KC and Re. As a rule ofthumb, it can
be stated that C M decreases as
C D in-creases, and vice versa, and that both
values gener-
ally lie in the range 0.8 to 2.0. The drag force coeffi-cient is
also influenced by roughness on thecylinder. (Marine growth is
particularly troublesomein this regard as it not only increases the
effectivediameter of a cylinder, but the increase in
roughnessgenerally leads to an increase in drag
coefficient,C D).
Figure 7: Inertia force coefficient dependence onflow
parameters
Figure 8: Drag force coefficient dependence onflow
parameters
The Morison equation has formed the basis for de-sign of a large
proportion of the world’s offshore platforms - a significant
infrastructure asset base, soits importance to offshore engineering
cannot be un-derstated. Appendix I provides a derivation of the
59
-
8/20/2019 (Mergue With Nallayarasu PDF)
6/11
EJSE Special Issue: Loading on Structures (2007)
Morison wave loads for a surface-piercing cylinderfor small
amplitude Airy waves and illustrates keyfeatures of the properties
of the inertia and dragforce components.
3.3 Transverse (Lift) wave loads
Transverse or lift wave forces can occur on offshorestructures
as a result of alternating vortex formationin the flow field of the
wave. This is usually associ-ated with drag significant to drag
dominant condi-tions (KC > 15) and at a frequency
associated withthe vortex street which is a multiple of the wave
fre-quency for these conditions. The vortex sheddingfrequency, n,
is determined by the Strouhal number,
N S , whose value is dependent upon the
structuralmember shape and Re, (typically ~0.2 for a
circular
cylinder in the range 2.5 x 10
2
< Re < 2.5 x 10
5
), andwhich is defined by
m
S U
nD N = (17)
where U m is the maximum alongwave water
particlevelocity and D is the transverse dimension of themember
under consideration (eg diameter of the cyl-inder).
The lift force per unit length, f L, can be
defined via
mm L L U U DC f
ρ 2
1
= (18)where C L is the Lift force coefficient
that is depend-ent upon the flow conditions. Again,
Sarpkaya’s(1976) original tests conducted on instrumentedhorizontal
test cylinders in a U-tube with a con-trolled oscillating water
column, also provide acomprehensive exploration of the lift force
coeffi-cient, from which the results depicted in Figure 9have been
obtained. (It should be noted here, that inthe case of flexible
structural members, when thevortex shedding frequency n
coincides with the
member natural frequency of oscillation, the resul-tant
vortex-induced vibrations give rise to the so-called “lock-in”
mechanism which is identified as aform of resonance).
Figure 9: Lift force coefficient dependence on flow
parameters
3.4 Diffraction wave forces
Diffraction wave forces on a vertical surface- piercing
cylinder (such as in Fig. 6) occur when thediameter to wavelength
ratio of the incident wave,
D/L, exceeds 0.2 and can be evaluated by integrat-ing the
pressure distribution derived from the time
derivative of the incident and diffracted wave poten-tials,
(MacCamy & Fuchs, 1954). Integrating thefirst moment of the
pressure distribution allowsevaluation of the overturning moment
effect aboutthe base. Results obtained for the diffraction
forceF(t) and overturning moment M(t) are given
by:
( ) ( ) ( )α ω κ κ κ
ρ −= t ha A
H gt F costanh
2)(
2 (19)
( )
( ) ( )[ ] ( )α ω κ κ κ
κ κ
ρ
−−+
=
t hhhh
a A H g
t M
cos1sectanh
.2
)(2 (20)
where
( ) ( ) ( )[ ] ( )( ) ⎟
⎟
⎠
⎞
⎜⎜
⎝
⎛
′
′−=′+′=
−
aY
a J aY a J a A
κ
κ α κ κ κ
1
11tan
211 ;
2
1
2 (21)
in which a is the radius of the cylinder ( D/2), (′)
de-notes differentiation with respect to radius r ,
J 1 andY 1 represent Bessel functions of
the first and second
kinds of 1
st
order, respectively. It should be notedthat specialist
software based upon panel methods, isnormally necessary to
investigate diffraction forceson structures of arbitrary shape, (eg
WAMIT,SESAM).
3.5 Effect of compliancy (relative motion)
In the situation where a structure is compliant (ienot rigid)
and its displacement in the alongwave di-rection at
position z from the free surface at time
t is
given by x(z,t), then the form of Morison’s
equationmodified under the “relative velocity”
formulation, becomes:
( )
( ) ),(),(),(),(...2
1
),(.1.4
),(..4
),( 22
t z xt zut z xt zu DC
t z x DC t zu DC t z f
D
M M
−−+
−−=
ρ
ρ π
ρ π
(22)
Consider the structure concerned to be of theform of the
surface-piercing cylinder depicted inFigure 6. Consider the
displacement at the MWL to be xo(t) and the primary
mode shape of response of
the cylinder to be ψ (z), with ψ (0) = 1, then
the cyl-inder motion can be considered to satisfy that ob-tained
from the equation of a single-degree-of-freedom (SDOF) oscillator,
given by:
60
-
8/20/2019 (Mergue With Nallayarasu PDF)
7/11
EJSE Special Issue: Loading on Structures (2007)
∫− Ψ≈++0
),()()()()(h
ooo
dzt z f zt kxt xct xm
(23)
where the integration has been taken to the MWL inlieu of
η (t), and at x = 0, as an approximation. Coef-ficients m,
c, and k represent the equivalent mass,viscous
damping and restraint stiffness of the cylin-
der at the MWL. (Note that allowing for forcing to be
considered at x(z,t) via u(x,z,t) produces
non-linearities that normally have only a minor effect onthe
character of the response (Haritos, 1986)).
When equation (22) for f(z,t) is substituted
into equation (23) above, the so-called “added
mass” term is identified for the cylinder viz:
dz z DC mh
A∫− Ψ=0
22 )(4
' ρ π
(24)
in which C A (= C M – 1)
is the “added mass” coeffi-cient.
This is an important result as it suggests that forall intensive
purposes a body of fluid surroundingthe cylinder appears to be
“attached” to it in its iner-tial response, and hence the coining
of the label“added mass” effect.
Equation (23) can be re-cast in the form
'
)()(2
2
mm
t F t F x x x
D I oooooo +
+=++ ω ζ ω (25)
where
dz zt zut F h
I )(),()(0
Ψ= ∫− α (26)
and
( )
dz z zt xt zu
zt xt zut F
o
oh
D
).(.)()(),(
.)()(),(.)(0
ΨΨ−
Ψ−= ∫−
β (27)
in which2
4 DC M ρ
π α = and
DC D ρ β 21= ,
ω o
is the natural circular frequency of the first modeand
ζ o is the critical damping ratio of the structure
inotherwise still water conditions.
In the case of )()( t x z oΨ small
compared to u(z,t) an approximation that can be made for this
interac-tive term is of the form:
( )
)()(),(2),(),(
)()(),()()(),(
zt xt zut zut zu
zt xt zu zt xt zu
o
oo
Ψ−≈
Ψ−Ψ−
(28)
Under these circumstances, equation (25) can befurther
simplified to:
( )'
)(')(2 2
mm
t F t F x x x
D I ooo H ooo +
+=+++ ω ζ ζ ω (29)
where
dz zt zut zut F h
D )(),(),()('0
Ψ= ∫− β (30)which is interpreted as the level
of equivalent drag
force at the MWL in the case of rigid support condi-tions
(negligible dynamic response).
The term ζ H in equation (29) is the
contribution
to damping due to hydrodynamic drag interaction
viz
( ) oh
H mm
dz zt zu
ω
β ζ
'
)(),( 20
+
Ψ≈ ∫−
(31)
(In the case of large diameter compliant cylinder in
the diffraction forcing regime, analogous expres-sions can be
derived for added mass effects and ra-diation damping due to
structure-fluid interaction ef-fects).
4 RESPONSE TO IRREGULAR SEA STATES
4.1 Inertia Force
Since the inertia force term FI(t) in equation (29)is linear it
generally poses little difficulty in model-ling under a variety of
hydrodynamic conditions.
Consider an irregular sea state composed of aFourier Series of
Airy wavelets conforming to a P-Mspectral description. Then ),(
t zu can be obtainedfrom the expression
( )
⎟⎟
⎠
⎞⎟ ⎠
⎞⎜⎝
⎛ −
⎜⎜⎝
⎛ +−= ∑
=
n
N
n n
nn
T
nt
T
f S
h
h zt zu
φ π
κ
κ ω
η 2cos
)(2
.)sinh(
)(cosh),(
2/
0
2
(32)
in which κn satisfies the dispersion relationship
ofequation (4).
In the case of Ψ(z) being a power law profile, asin Figure 10,
then
N
h
z z ⎟
⎠
⎞⎜⎝
⎛ +=Ψ 1)( (33)
and FI(t) can be shown to be obtainable via the
ex- pression given by (Haritos, 1989),
61
-
8/20/2019 (Mergue With Nallayarasu PDF)
8/11
EJSE Special Issue: Loading on Structures (2007)
N
N = 4
N = 2
N = 1
N = 0
IN(κh)
κh
0 2 4 6 8 10
0.2
0.4
0.6
0.8
1.0
ζ
2
5
1
1
5
4
3
2
1
01 2 4 8 16
σ
σ
x
xs
f of p
(
⎟⎟
⎠
⎞⎟ ⎠
⎞⎜⎝
⎛ −
= ∑=
n
N
n
n N M I
T
nt
T
f S
h I DgC t F
φ π
κ ρ π
η 2cos
)(.2
).(4
)(2/
0
2
(34)
where:
1,)cosh(
11
1)()(
0,)tanh()(
2,)(1
1)()(
01
0
20
=⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −−=
==
≥⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −−−= −
N hh
h I h I
N hh I
N h I h
N
h
N h I h I
nn
nn
nn
n N
nn
nn N
κ κ κ κ
κ κ
κ κ κ
κ κ
(35)
Figure 10: Compliant vertical surface-piercing cylinder
Figure 11 presents the variations in )( h I
n N κ for arange of power exponents N in
mode shape Ψ(z).The result for N = 0 is consistent with the
derivationfor the inertia force component acting on a rigid
cyl-
inder due to an Airy wave made in Appendix I.
Figure 11: Variation of I N(κh) for varying N
It is observed that all variations for )( h I
n N κ are as-ymptotic to 1 and that
I 0(π ) is close to this value tothe order of
accuracy associated with the “deep wa-ter” limit of Airy waves (ie
κh = π) but for N>0,
I N (κ h) ≈ 1 for
κh >> π. In general, the effect ofhigher order mode shapes (N
> 0) is to reduce thelevel of inertia forcing of each Airy
wavelet in an ir-
regular sea state.Figure 12 depicts the results obtained for the
re-
sponse of a vertical cylinder in deep water condi-tions
(I N(κh) = 1) for inertia only forcing in uni-directional P-M
waves.
Figure 12: Influence of Dynamic Properties on Response(Inertia
dominant forcing in deep water)
The levels are quoted as the ratio of the standard de-viation in
the response of a cylinder exhibiting anatural frequency of
f o to that of a near weightlesscylinder with the
same stiffness for which f o ap- proaches
infinity. It is clear from direct observationof Figure 12, that
response levels are controlled by both damping and the amount
of relative energyavailable near 'resonance' for a dynamically
respond-ing cylinder in an irregular sea state.
4.2 Drag force
Whilst it is possible to deal with the u|u| term fordrag
force numerically, the linearised approximation
to ),( t zu attributed to Borgman (1967), can
be usedin the case u(z,t) Gaussian in a random sea state,
sothat
)(.8
),( zt zuu
σ π
≈ (36)
where σ u(z) is the standard deviation in
water particle velocity and where current is taken
aszero-valued for all z.
This approximation can be used to simplify theexpressions for
both ζ H in equation (31) and
F D(t) in equation (30) and to thereby obtain
closed-
form solutions in the case of nominated
Ψ (z)variations.
This approximation would seem reasonable for de-termination of
ζ H for “stiff” structures, but in
situa-tions when the drag force F D(t) is
considered domi-nant, this linearization can lead to significant
errorsin the modelling of both the non-linear drag forceand the
prediction of the resultant response, accord-ing to Lipsett
(1985).
5
EXTREME VALUES
In the case of random vibrations associated with lin-ear
systems, use can be made of upcrossing theory
62
-
8/20/2019 (Mergue With Nallayarasu PDF)
9/11
EJSE Special Issue: Loading on Structures (2007)
Sη(f) SFtot
(f)
SFI(f)
SFD(f)H2FD,η
(f)
H2FI,η(f)
X
X
=
=
=+2η σ
2
t F σ
Sη(f) SFtot
(f)
SFI(f)
SFD(f)H2FD,η
(f)
H2FI,η(f)
X
X
=
=
=+2η σ
2
t F σ
in combination with spectral modelling of the proc-esses
involved to develop a basis for prediction of peak response
values, (Nigam & Narayanan, 1994).
A linear filter has the characteristics described
by( H y,η (f), φ lag(f)) which apply to
the Fourier compo-nents of a random time varying quantity (such as
awaveheight trace, η (t), conforming to say a P-M
spectrum) at frequency f , to produce a modified
re-sultant time varying quantity, y(t), that is linearly
re-lated to η (t), as follows
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ ⎟ ⎠
⎞⎜⎝
⎛ −+⎟ ⎠
⎞⎜⎝
⎛ −
= ∑=
)(2
sin)(2
cos
.)()(2/
1
,
nlagnnlagn
N
n
n y
f T
nt b f
T
nt a
f H t y
φ π
φ π
η
(37)
A 'zero-lag' filter would be one for which
φ lag(f n) = 0 for all
frequencies f n.
The spectrum for y, given by S y(f), can be
ob-tained from the spectrum of waveheight, S η (f),
via
)().()( 2,
f S f H f S
y y η η = (38)
5.1 Extreme Wave Forces
Use can be made of the dispersion relationship ofequation (4) in
conjunction with the separate de-scriptions above for Inertia and
Drag force, to obtain
the associated relationships for )(, f H
I F η and)(,
f H DF η
respectively, and hence the total forcespectrum for the
surface-piercing cylinder of Figure6. A diagrammatic illustration
of the concept is pro-vided in Figure 13.
Figure 13: Diagrammatic description of spectral modelling
ofMorison wave loading
The area under the total force spectrum equals thevariance,
2
T F σ , knowledge of which may be used to
estimate peak Morison loading of the vertical sur-face-piercing
cylinder, under consideration. This
peak load value may reasonably be expected to be ofthe
order
T F
σ 3 , but a more precise estimation is of-fered through the
use of upcrossing theory.
For a Normally distributed trace y(t) with zeromean
and variance 2
yσ , the rate of upcrossings at
level y, ν y, equates to the count of
upcrossings at
level y, N y, divided by the time length of
trace, T (ieν y = N y /T ).
ν o would correspond to the rate of up-crossings of the
zero mean.
It can be shown (Newland, 1975) that upcrossingsfor such a trace
would satisfy
2
2
1
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −
== y
y
o
y
o
y
e N
N σ
ν
ν (39)
The concept of a “peak value” in a time period ofT would
correspond to a y value with an upcrossingcount of 1 so
that ymax can be estimated from
2
max
2
1
1 ⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −
= y y
o
eT
σ
ν (40)
so that
yoT y σ ν .)ln(2max =
(41)
Because the value of ymax itself shows a
statisticalvariation, Davenport (1964) has suggested a
smallcorrection to equation (41) for the value of
E(ymax) so that
y
o
oT
T y σ ν
ν .)ln(2
577.0)ln(2max ⎟⎟ ⎠
⎞
⎜⎜⎝
⎛ += (42)
Now the rate of “zero” upcrossings is given by:
π
σ
σ
ν 2
)(
)(⎟⎟ ⎠
⎞⎜⎜⎝
⎛
= y
y
o
∫
∫∞
∞
=
0
0
2
)(
)(
df f S
df f S f
y
y
(43)
which can be determined from the spectral descrip-tion.
If y(t) is a narrow-banded process (ie energy
isconcentrated at a peak frequency, f p), then
ν o ≈ f p.
5.2 Extreme Response Values
The concepts above can be applied to the dynami-cally responding
surface-piercing cylinder to esti-mate the peak response at MWL,
(xo)max.
An additional stage is required for this purpose,
namely the linear transformation from Morison forc-ing to
dynamic excitation via the description ofequation (29), which in
terms of a spectral modellingapproach, is diagrammatically depicted
in Figure14.
63
-
8/20/2019 (Mergue With Nallayarasu PDF)
10/11
EJSE Special Issue: Loading on Structures (2007)
SFtot(f) H2x,F(f) Sx(f)
=X2
t F σ 2
xσ f o f o
SFtot(f) H2x,F(f) Sx(f)
=X2
t F σ 2
xσ f o f o
Figure 14: Diagrammatic description of spectral modelling
ofdynamic response
The Transfer Function for response from Morisonloading in
irregular sea states for the dynamically re-sponding
surface-piercing cylinder of Figure 10 isgiven
by H x,F (f), via
( )22
2
,'
)()(
mm
f f H mF x
+= χ
(44)
where
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ ⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ ⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −
=222
2
21
1)(
o
tot
o
m
f
f
f
f
f
ζ
χ (45)
in which f o is the natural frequency of
the cylin-der and ζ tot is the total critical
damping ratio
(ζ tot =ζ o +ζ H ).
The area under the response spectrum yields2
xσ
and after application of equation (43) to obtain
ν o,extreme value (xo)max can be obtained from
equation(42), for the nominated duration of the irregular seastate
under consideration, (eg T = 3600 secs for a 1-hour storm).
6 CONCLUDING REMARKS
This paper has provided an overview of some of thekey factors
that need be considered in the analysis
and design of offshore structures. Emphasis has been placed
on modelling of the hydrodynamic responseof a compliant vertical
surface-piercing cylinder inthe Morison loading regime under
uni-directionalwaves. Reference has also been made to a number
of
publications in which further detail and extension
oftreatment can be explored by the interested reader.
REFERENCES
API, 1984. Recommended Practice for Planning,
Designing
and Constructing Fixed Offshore Platforms, American Pe-troleum
Institute, API RP2A, 15th Edition.
Borgman, L.E. 1967. Spectral Analysis of Ocean Wave Forceson
Piling , Jl WW& Harbors, Vol. 93, No. WW2, pp 129-156.
Davenport, A.G. 1964. Note on the Distribution of the
LargestValue of a Random Function with Application to GustLoading,
Proc. ICE , Vol. 28, No. 187.
DNV-OS-C101, 2004. Design of Offshore Steel
Structures,General (LFRD Method). Det Norske Veritas,
Norway.
DNV-OS-C105, 2005. Structural Design of TLPS,
(LFRD Method). Det Norske Veritas, Norway.
DNV-OS-C106, 2001. Structural Design of Offshore Deep
Draught Floating Units, (LFRD Method). Det Norske
Veri-tas, Norway.Chakrabarti, S. K. (ed) 2005. Handbook of
Offshore Engineer-
ing, San Francisco: Elsevier.Chakrabarti, S. K. 2002. The Theory
and Practice of Hydrody-
namics and Vibration, New Jersey: World Scientific.Chakrabarti,
S. K. (ed) 1987. Fluid Structure Interaction in
Offshore Engineering, Southampton: Computational Me-chanics
Publications.
Chakrabarti, S. K. 1994. Hydrodynamics of Offshore
Struc-tures, Southampton: Computational Mechanics
Publica-tions.
Dean R. G. & Dalrymple, R. A. 1991. Water Wave
Mechanics for Engineers and Scientist s, New Jersey:
World Scientific.
Rienecker, M.M. & Fenton, J.D. 1981. A Fourier
approxima-tion method for steady water waves, J. Fluid Mechs,
Vol104, pp 119-137.
Graff, W. J. 1981. Introduction to Offshore Structures –
De-sign, Fabrication, Installation, Houston: Gulf
PublishingCompany.
Haritos, N. 1986. Nonlinear Hydrodynamic Forcing of Buoysin
Ocean Waves, Proc. 10th Aust. Conf. on Mechs. ofStructs. &
Materials, Adelaide, pp 253-258.
Haritos, N. 1989. The Influence of Modal Characteristics onthe
Dynamic Response of Compliant Cylinders in Waves,Computational
Techniques & Applications: CTAC-89, editW.L. Hogarth & B.J.
Noye, pp 683-690, (Hemisphere).
Holand, I., Gudmestad, O. T. & Jersin, E. (eds). 2000.
Designof Offshore Concrete Structures, London: Spon
Press.ICE, 1983, Design in Offshore Structures, ICE, London:
Tho-
mas Telford Ltd.Le Mehaute, B. 1969. An introduction to
hydrodynamics and
water waves, Water Wave Theories, Vol. II, TR ERL 118-POL-3-2,
U.S. Department of Commerce, ESSA, Washing-ton, DC.
Lipsett, A.W. 1985. Nonlinear Response of Structures in Regu-lar
and Random Waves, Ph.D. Thesis, Univ. of British Co-lumbia,
Canada.
MacCamy, R. C. & Fuchs, R.A.1954. Wave Forces on Piles:
aDiffraction Theory, U.S. Army Coastal Engineering Centre,Tech Memo
No. 69.
Newland, D.E. 1975. An Introduction to Random
Vibrationsand Spectral Analysis. Longman.
Nigam, N. C. & Narayanan, S. 1994. Applications
of RandomVibrations, New York: Springer-Verlag.
Sarpkaya, T. 1976, In-line and transverse forces on cylinders
inoscillating flow at high Reynold’s number, Proc. 8
th Off-
shore Technology Conference, Houston, Texas, OTC 2533, pp
95-108.
Sarpkaya, T. & Isaacson, M. 1981. Mechanics of Wave
Forceson Offshore Structures, New York: Van Nostrand
SESAM,http://www.dnv.com/software/systems/sesam/programModules.asp
Stewart, R. H. 2006. Introduction to Physical Oceanography,
http://oceanworld.tamu.edu/resources/ocng_textbook/PDF_ files/book.pdf .WAMIT,
http://www.wamit.com/ Wheeler, J.D. 1970. Method for
calculating forces produced by
irregular waves, Journal of Petroleum Technology,
March, pp 359-367.
64
-
8/20/2019 (Mergue With Nallayarasu PDF)
11/11
EJSE Special Issue: Loading on Structures (2007)
-1.5
-1
-0.5
0
0.5
1
1.5
0 0.2 0.4 0.6 0.8 1tT
FtotFI
Drag
Inertia
Total
(a)-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
0 0.2 0.4 0.6 0.8 1tT
FtotFI
Drag
Inertia
Total
(b)
Appendix I. – Base shear on a surface-piercingcylinder from
Morison loading
),(),(),(
t z f t z f t z f
D I +=
ƒ I (z,t) = α .u ;
(α =
π4
ρ CM D2)
ƒ D (z,t) = β u|u| ; (β =12
ρ CD D)
Inertia:
FI (t) = ⌡⌠ -h
o
α .u dz
⎝ ⎜⎜⎛
⎠⎟⎟ ⎞
= ⌡⌠ -h
o
ƒI (z,t) dz
= α ω2
sinh(κh) a.sin(κx-ωt) ⎪
⎪⎪⎪sinh( )κ(z + h)
κ -h
o
= α ω2
κ a . sin(κx - ωt) ⎪⎪ ⎪⎪sinh(κh)sinh(κh) - 0
= α g tanh(κh) . a . sin(κx - ωt)
= α g a sin(κx - ωt) (Deep Water)
Drag:
FD (t) = ⌡⌠ -h
o
β u|u|dz
⎝ ⎜⎜⎛
⎠⎟⎟ ⎞
= ⌡⌠ -h
o
ƒD (z,t) dz
= β a2 ω2
sinh2 κh cos (κx - ωt) | |cos (κx - ωt)
. ⌡⌠ -h
o
cosh2( )κ(z + h) dz
FD (t) = β a2 ω2
sinh2(κh) cos (κx - ωt) | |cos (κx - ωt)
. ⌡⌠
-h
o
1
2 (1 + cosh 2( )κ(z + h) ) dz
FD (t) = β a2 ω2
sinh2(κh) cos (κx - ωt)| |cos (κx - ωt) .
1
2 ⎝ ⎛
⎠ ⎞h + sinh(2κh)
2κ
FD (t) =
⎣
⎢⎡
⎦
⎥⎤
β a2 ω2 h
2 sinh2(κh)
+ β a2 g tanh(κh)
4
⎝
⎜⎛
⎠
⎟ ⎞sinh(2κh)
sinh2(κh)
. cos (κx - ωt)| |cos (κx - ωt)
=⎣⎢⎡
⎦⎥⎤
β a2g κhsinh2κh + β
a2g
2 cos(κx-ωt)| |cos (κx - ωt)
=β a2g
2 ⎣⎡
⎦⎤2 κ h
sinh2κh + 1 cos (κx - ωt)| |cos (κx - ωt)
Hence, as an alternative approximation
FD (t) ≈ β a2g
2 cos(κx-ωt)
Inertia:
α a g tanh(κh) sin (κx - ωt) → FI sin (κx -
ωt)
Drag:
β a2g2
⎣⎡
⎦⎤2 κ h
sinh2κh + 1 cos (κx - ωt) . | cos (κx - ωt)|
→ FD cos (κx - ωt) | cos (κx - ωt)|
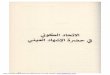
Figures I.a and I.b depict representative varia-tions over one
cycle of Airy wave of the Base Shearforce acting on a cylinder
normalised with respect toFD/FI = 2, respectively, by way of
illustration.
Figure I: Morison Base Shear Force components for (a):
FD/FI = 0.8 and (b): FD/FI = 2
65