Embed Size (px)
Citation preview

Simulation, Modeling, & Decision Science AMES LABORATORY
Merged Environment for Simulation and
Analysis (MESA)
Project Investigator: Dr. Mark Bryden
Post-doc Research Associate Dr. Paolo Pezzini
Date: 04/12/2018
DOE Award Number DE-AC02-07CH11358
Period of Performance FY2017

Objectives
1. Enabling high efficiency high turn down operation of hybrid power systems
2. Enabling rapid design and analysis of complex power systems
3. Creating on the fly updates for control systems for existing power plants

Traditional Control Strategies
• Model-based design
• Tuned for a specific operating point

Limitations
Characterization of each operating point
• Process instability
• Adaptability cannot be reached without system identification

High efficiency high turn down operation
• Model-free design
• Adaptable on-the-fly
• Reconfigurable on different power plants
• Intelligent

Agent-based Control
• Multi-agents emulates intelligent control
• Agents can coordinate their behavior
• Agents are not limited to a set of models

Multi-agents in building automation
Multi-agents are mainly used for supervisory applications..
Local Temperature
Agent
Local Illumination
Agent
Local Air Quality Agent
Central Agent Optimizer• Model Predictive Control• Ant colony optimization• …
Supervisory control (minutes or hours timescale)
Dynamic control (milliseconds timescale)

Multi-agents for dynamic control of energy systems
Goal of Multi-agent Control Strategies

Grouping sensors and actuators in computational agents
Agent NAgent 1
Sensors
Local Decision
Actuator……
Sensors
Local Decision
Actuator
Agent Selection Criteria
Random Probability of ActionAgent Selection Criteria- Set of rules to avoid simultaneously actions
Random Probability of action- Emergent behavior in social insects
- Determines frequency of action taken
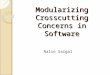
Resource sharing algorithm
Shared Resource (Blocks) establishes cooperation and sharing
Blocks are a discrete unit of change to an actuator
Exchange of blocks when the current state is not at nominal condition
Block Repository
Agent NAgent 1
……
Sensors
Current State
Actuator
Sensors
Current State
Actuator

Multi-agents control tested on Hyper
1. Multi-input multi-output (MIMO)
- 2 sensors and 2 actuators
- 2 agents
2. Multi-input single-output (MISO)
- 1 sensor and 2 actuators
- 2 co-worker (homogenous) agents
Turbine Speed
Electric Load
Current State
Block Repository
Agent 1 Blocks
Cathode Mass Flow
Cold Air Bypass
Current State
Agent 2 Blocks
CurrentState
Bleed-air
Turbine Speed
CurrentState
Auxiliary Fuel Valve
Turbine Speed
Block Repository
Agent 1 Agent 2
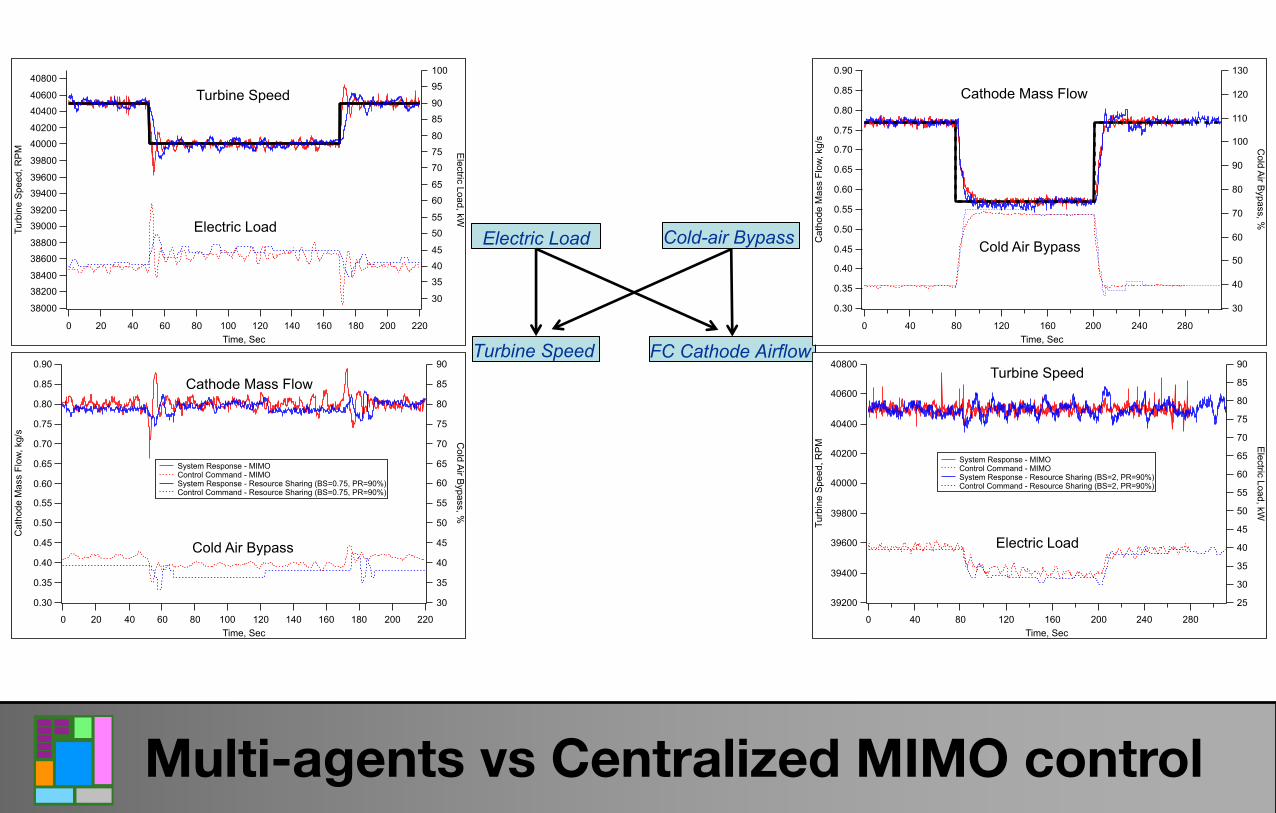
Electric Load Cold-air Bypass
Turbine Speed FC Cathode Airflow
40800
40600
40400
40200
40000
39800
39600
39400
39200
39000
38800
38600
38400
38200
38000
Turb
ine
Spe
ed, R
PM
220200180160140120100806040200Time, Sec
100
95
90
85
80
75
70
65
60
55
50
45
40
35
30
Electric Load, kW
0.90
0.85
0.80
0.75
0.70
0.65
0.60
0.55
0.50
0.45
0.40
0.35
0.30
Cat
hode
Mas
s Fl
ow, k
g/s
220200180160140120100806040200Time, Sec
90
85
80
75
70
65
60
55
50
45
40
35
30
Cold A
ir Bypass, %
Turbine Speed
Electric Load
Cathode Mass Flow
Cold Air Bypass
System Response - MIMO Control Command - MIMO System Response - Resource Sharing (BS=0.75, PR=90%) Control Command - Resource Sharing (BS=0.75, PR=90%)
0.90
0.85
0.80
0.75
0.70
0.65
0.60
0.55
0.50
0.45
0.40
0.35
0.30
Cat
hode
Mas
s Fl
ow, k
g/s
28024020016012080400Time, Sec
130
120
110
100
90
80
70
60
50
40
30
Cold A
ir Bypass, %
40800
40600
40400
40200
40000
39800
39600
39400
39200
Turb
ine
Spe
ed, R
PM
28024020016012080400Time, Sec
90
85
80
75
70
65
60
55
50
45
40
35
30
25
Electric Load, kW
Cathode Mass Flow
Cold Air Bypass
Turbine Speed
Electric Load
System Response - MIMO Control Command - MIMO System Response - Resource Sharing (BS=2, PR=90%) Control Command - Resource Sharing (BS=2, PR=90%)
Multi-agents vs Centralized MIMO control

Multi-input single-output (MISO)
Nominal design
[%]Auxiliary fuel valve range of operation
Bleed-air valve range of operation
Nominal condition:
• Fuel cell thermal heat drives the gas turbine
• Closed valves position to maximize system efficiency
• Valve opening during transient operation
Cold Air Bypass
Air
Exhaust
MixingVolume
Generator
Hot AirBypass
Bleed AirBypass
Anode
Cathode
Electrolyte
FuelPre-Combustor
Fuel
Combustor
AuxiliaryFuel

Co-worker agents algorithm
Asynchronous agent selection criteria
• Saturation limit as agent selection criteria
• 10% Probability of action Current
State
Bleed-air
Turbine Speed
CurrentState
Auxiliary Fuel Valve
Turbine Speed
Block Repository
Agent 1 Agent 2

Turbine load following – turn down
Turbine Speed Deviation
• In open-loop: 1000 rpm
• Multi-agent: 500 rpm
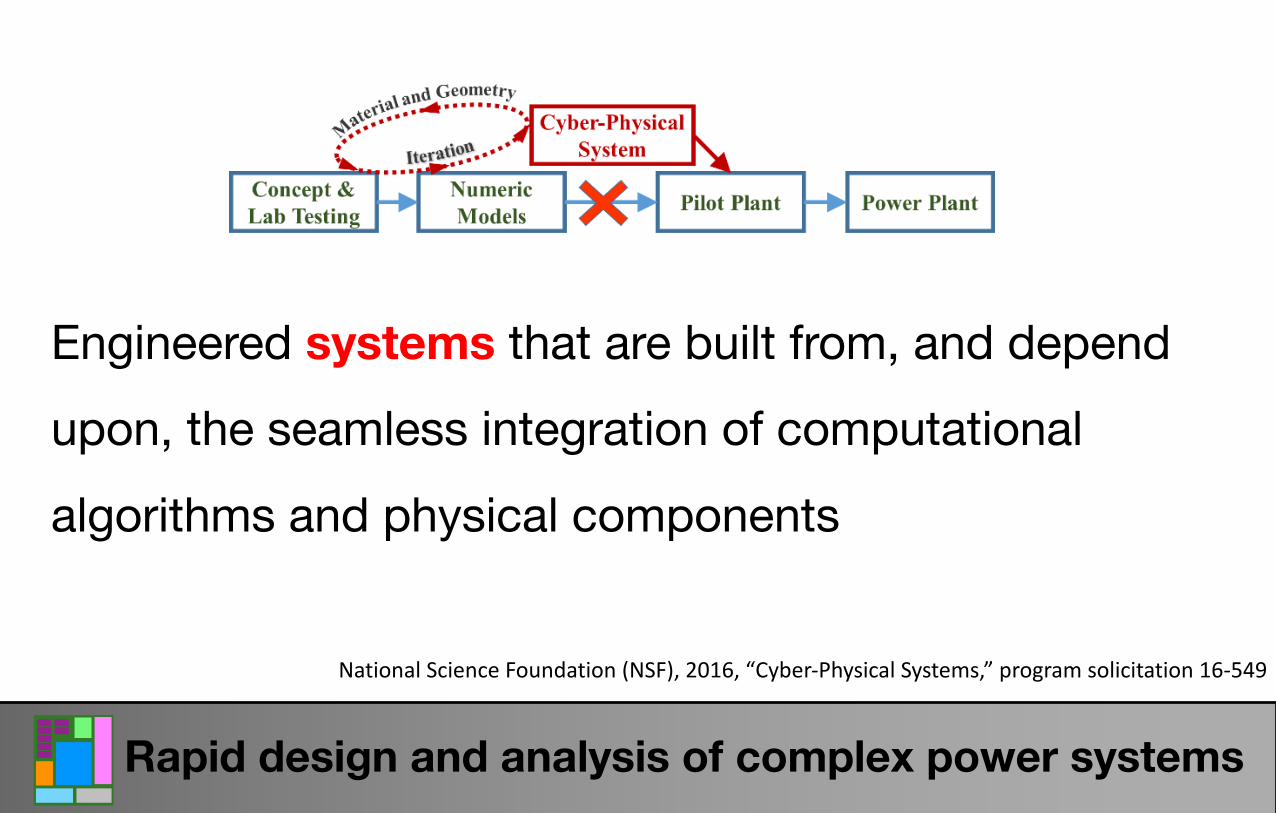
Engineered systems that are built from, and depend
upon, the seamless integration of computational
algorithms and physical components
National Science Foundation (NSF), 2016, “Cyber-‐Physical Systems,” program solicitation 16-‐549
Rapid design and analysis of complex power systems

NETL’s Cyber-physical System
Hybrid Performance Project (HYPER)
Design and Validation of Advanced Sensors• Advanced Sensing• High Temperature & Harsh Environment
Applications• Smart Sensors• Sensor Placement
Design and Validation of Novel Control Strategies
• Distributed Intelligent Control• Smart Actuation• Efficient Decision Making• Digital twin

Controls update for existing power plants
Technical Issues• Part-load operation
• Increase degradation of components
• Controls are designed for based–load operation

Health Parameter Degradation Profile
J. S. Litt, K. I. Parker, S. Chatterjee, “Adaptive Gas Turbine Engine Control for Deterioration Compensation Due to Aging,”Proceedings of the 16th International Symposium on Airbreathing Engines (ISABE–2003–1056), NASA/TM—2003-‐212607
Degradation rate is function of• Effective cycles
• Physical age
Degradation Rate
Effective Cycles
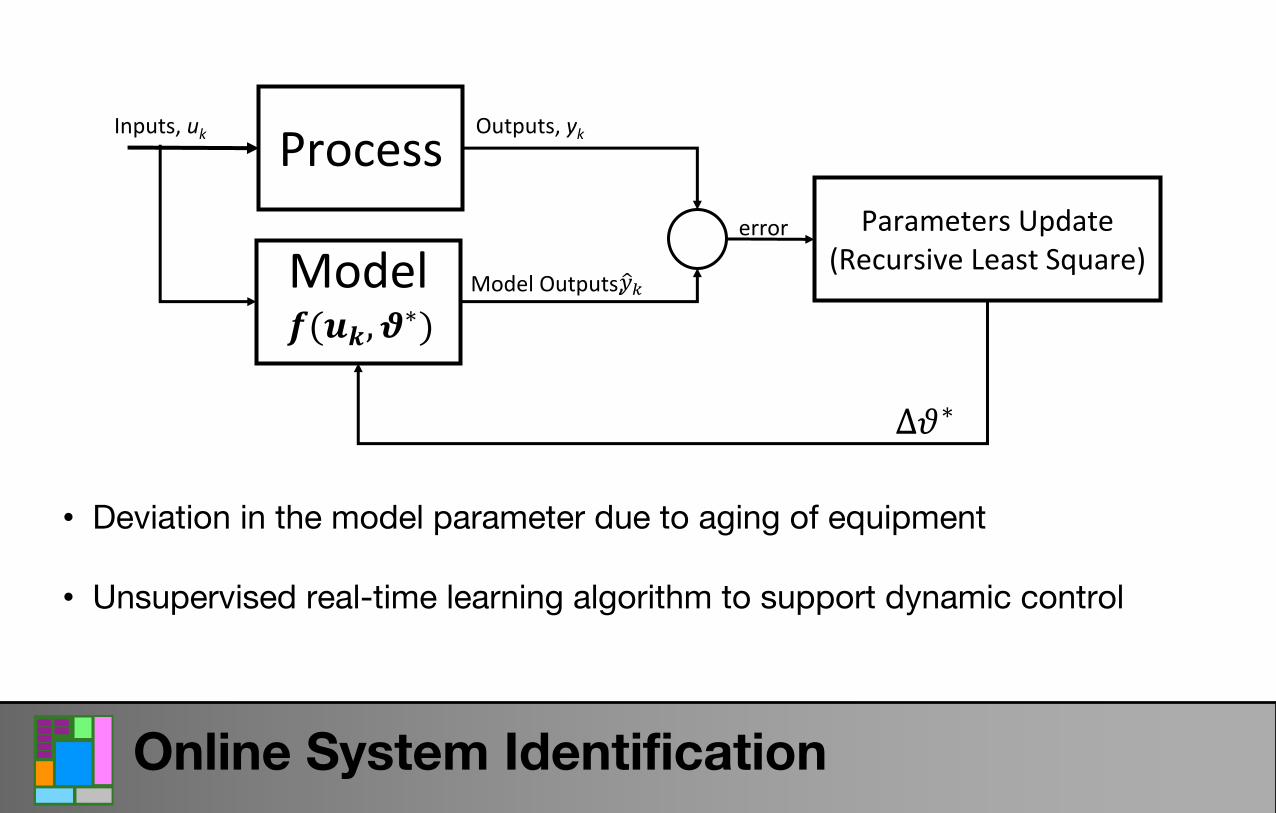
Online System Identification
• Deviation in the model parameter due to aging of equipment
• Unsupervised real-time learning algorithm to support dynamic control
ProcessInputs, uk Outputs, yk
Model Model Outputs,𝑦"#
Parameters Update(Recursive Least Square)
error
𝒇(𝒖𝒌, 𝝑∗)
∆𝜗∗

Summary
1. Enabling high efficiency high turn down operation of hybrid power systems
2. Enabling rapid design and analysis of complex power systems
3. Creating on the fly updates for control systems for existing power plants

Future work
Co-worker/Homogenous agents
• Fuel cell model in the loop – test reproducibility
• Supercritical CO2 power cycle
Virtual plant and cyber-physical track• ASME Power and Energy Conference
Existing power plants
• Online system identification

Acknowledgements
MESA Team in AmesDr. Peter Finzell
Dan Bell (PhD grad, Iowa State U)
Zach Reinhard (PhD grad, Iowa State U)
Tina Akinyi (PhD grad, Iowa State U)
Wadood Daoud (PhD grad, Iowa State U)
Hyper Team in NETL
Dr. David Tucker
Dr. Larry Shadle
Dr. Farida Nor Harun
Dr. Nana Zhou
Mr. Harry Bonilla