Embed Size (px)
Citation preview

MEMS and Robotics-BasedManipulation and Characterization ofMicroand Nanomaterials
by
Yong Zhang
A thesis submitted in conformity with the requirementsfor the degree of Doctor of Philosophy
Graduate Department of Electrical and Computer EngineeringUniversity of Toronto
Copyright© 2011 by Yong Zhang

Abstract
MEMS and Robotics-Based Manipulation and Characterization of Micro and Nanomaterials
Yong Zhang
Doctor of Philosophy
Graduate Department of Electrical and Computer Engineering
University of Toronto
2011
Advances in the synthesis of micrometer and nanometer-sized materials have resulted in a
range of novel materials having unique properties. Characterizing those materials is important
for understanding their properties and exploring their applications. Physically manipulating
those materials is important for constructing devices. This thesis develops tools and techniques
for the manipulation and characterization of micro and nanomaterials.
A microelectromechanical systems (MEMS) microgripper is developed to pick and place
micro-objects, achieving high repeatability, accuracy, and speed. The adhesion forces at the
microscale are overcome by actively releasing the adhered micro-object from the microgripper.
A microrobotic system is built based on this microgripper and realizes automated pick-and-
place of microspheres to form patterns.
To characterize the electrical properties of one-dimensional nanomaterials, a nanorobotic
system is developed to control four nanomanipulators for automated four-point probe measure-
ment of individual nanowires inside a scanning electron microscope (SEM). SEM is used as a
vision sensor to realize visual servo control and contact detection.
To characterize the electromechanical properties of individual nanowires, a MEMS device
is designed and fabricated that is capable of simultaneous tensile testing and current–voltage
measurement of a nanowire specimen. A nanomanipulation procedure is developed to transfer
a single nanowire from its growth substrate to the MEMS device in SEM. The piezoresistive
properties of silicon nanowires are characterized.
ii

A nanomanipulation system is developed that is capable of being mounted onto and de-
mounted from the SEM specimen stage without opening the high-vacuum chamber. The sys-
tem architecture allows the nanomanipulators to be transferred through the SEM load-lock.
This advance facilitates the replacement of end-effectors and circumvents chamber contamina-
tion due to venting.
iii

Acknowledgements
I would like to express my gratitude to my adviser, Prof. Yu Sun, for providing guidance, ad-
vice, and support throughout my Ph.D. studies. His broad knowledge and considerable insight
were instrumental in my research. His striving for excellence has been an inspiration to me.
I thank Prof. Xueliang Sun and his student Yu Zhong, and Prof.Junqiao Wu and his stu-
dent Kevin Wang for the valuable collaboration opportunities in nanomaterial characterization.
I thank Prof. Wai Tung Ng, Prof. Bruce Francis, Prof. Axel Guenther, Prof. Gary Fedder,
Prof. Jean Zu, and Prof. Foued Ben Amara for serving on my Ph.D. exam and defense com-
mittees and commenting on my project.
Hitachi High-Technologies Canada Inc. partially funded myproject. Its staff members,
Dr. David Hoyle, Dr. Patrick Woo, Mitsuhiro Nakamura, and Ian Cotton provided technical
support and constructive suggestions. The managers and technicians with the cleanrooms of the
Emerging Communications Technology Institute and the ThinFilm Physics and Technology
Research Center provided considerate assistance during mymicrofabrication.
I am also grateful for the support and friendship of all my former and current colleagues
with the Advanced Micro and Nanosystems Laboratory, including Prof. Xinyu Liu, Prof. Chang-
hai Ru, Prof. Wenhui Wang, Prof. Jianhua Tong, Dr. KeekyoungKim, Dr. Yanliang Zhang,
Dr. Zhe Lu, Jian Chen, Brandon Chen, Jason Li, and many others.
I thank my parents for their love and support.
iv

Contents
1 Introduction 1
1.1 Background and Motivations . . . . . . . . . . . . . . . . . . . . . . . .. . . 1
1.2 Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3 Dissertation Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . 4
2 Pick-and-Place of Micro-Objects Using a MEMS Microgripper 5
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5
2.2 Three-Pronged Microgripper . . . . . . . . . . . . . . . . . . . . . . .. . . . 8
2.3 Force Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.4 Experimental Results and Discussion . . . . . . . . . . . . . . . .. . . . . . 15
2.4.1 Repeatability of Active Release . . . . . . . . . . . . . . . . . .. . . 16
2.4.2 Quantification of Release Performance . . . . . . . . . . . . .. . . . 17
2.4.3 Understanding the Curved Trajectory . . . . . . . . . . . . . .. . . . 20
2.5 Microrobotic Pick-and-Place of Microspheres . . . . . . . .. . . . . . . . . . 22
2.5.1 Recognition of Microgripper and Microspheres . . . . . .. . . . . . . 22
2.5.2 Contact Detection and Microrobotic Control . . . . . . . .. . . . . . 23
2.5.3 Automated Pick-and-Place of Microspheres . . . . . . . . .. . . . . . 26
2.5.4 Three-Dimensional Assembly of Microspheres . . . . . . .. . . . . . 27
2.6 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
v

3 Automated Four-Point Probe Measurement of Nanowires in SEM 29
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29
3.2 Automated Nanomanipulation inside SEM . . . . . . . . . . . . . .. . . . . . 31
3.2.1 Nanomanipulation System . . . . . . . . . . . . . . . . . . . . . . . .31
3.2.2 Recognition of Probes and Nanowires . . . . . . . . . . . . . . .. . . 33
3.2.3 Feature Tracking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.2.4 Vision-Based Contact Detection . . . . . . . . . . . . . . . . . .. . . 34
3.2.5 Look-then-Move Control and Visual Servo Control . . . .. . . . . . . 35
3.2.6 Overall Process of Automated Nanomanipulation . . . . .. . . . . . . 37
3.3 Experimental Results and Discussions . . . . . . . . . . . . . . .. . . . . . . 38
3.3.1 Manual Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.3.2 Evaluation of Drift and Noise in SEM Imaging . . . . . . . . .. . . . 39
3.3.3 Contact Detection Results . . . . . . . . . . . . . . . . . . . . . . .. 41
3.3.4 Performance of Vision-Based Control System . . . . . . . .. . . . . . 42
3.3.5 Four-Point Probe Measurement Results . . . . . . . . . . . . .. . . . 43
3.4 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4 Piezoresistivity Characterization of Nanowires using a MEMS Device 46
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .46
4.2 Device Design and Analysis . . . . . . . . . . . . . . . . . . . . . . . . .. . 48
4.2.1 Device Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.2.2 Mechanical Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.2.3 Electrical Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . .52
4.3 Device Fabrication and Calibration . . . . . . . . . . . . . . . . .. . . . . . . 53
4.3.1 Microfabrication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.3.2 Sensor Calibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.4 Experimental Results and Discussions . . . . . . . . . . . . . . .. . . . . . . 56
4.4.1 Synthesis of Silicon Nanowires . . . . . . . . . . . . . . . . . . .. . 56
vi

4.4.2 Transfer of Nanowire onto MEMS Device . . . . . . . . . . . . . .. . 57
4.4.3 Nanowire Characterization . . . . . . . . . . . . . . . . . . . . . .. . 59
4.4.4 Effect of E-Beam Irradiation . . . . . . . . . . . . . . . . . . . . . . . 61
4.5 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5 A load-lock-compatible nanomanipulation system for SEM 64
5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .64
5.2 System Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5.3 System Characterization . . . . . . . . . . . . . . . . . . . . . . . . . .. . . 69
5.3.1 SEM Imaging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
5.3.2 Actuator Characterization . . . . . . . . . . . . . . . . . . . . . .. . 70
5.3.3 Encoder Characterization . . . . . . . . . . . . . . . . . . . . . . .. . 73
5.3.4 Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
5.4 Results and Discussions . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . 77
5.5 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
6 Conclusions 82
6.1 Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .83
6.2 Future Directions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 83
vii

List of Tables
2.1 Structural Parameters of the Microgrippers . . . . . . . . . .. . . . . . . . . . 10
2.2 Summary of Release Accuracy . . . . . . . . . . . . . . . . . . . . . . . .. . 20
3.1 Quantification of SEM Image Drift and Noise . . . . . . . . . . . .. . . . . . 40
5.1 Resolution of the Optical Encoders . . . . . . . . . . . . . . . . . .. . . . . . 74
5.2 Summary of System Performance. . . . . . . . . . . . . . . . . . . . . .. . . 78
viii

List of Figures
1.1 Manipulation of nanomaterials for mechanical and electrical characterization. . 3
2.1 SEM image of a three-pronged microgripper. . . . . . . . . . . .. . . . . . . 7
2.2 Microgripper schematic. . . . . . . . . . . . . . . . . . . . . . . . . . .. . . 9
2.3 Microfabrication process. . . . . . . . . . . . . . . . . . . . . . . . .. . . . . 10
2.4 Characterized microactuator performance. . . . . . . . . . .. . . . . . . . . . 11
2.5 Adhesion forces acting on a microsphere on a rough surface. . . . . . . . . . . 12
2.6 Analysis of forces during grasping and active release. .. . . . . . . . . . . . . 14
2.7 Experimental setup for micrograsping and active release tests. . . . . . . . . . 16
2.8 Landing positions of microspheres. . . . . . . . . . . . . . . . . .. . . . . . . 18
2.9 Landing positions of microspheres released from 2µm height. . . . . . . . . . 19
2.10 Pick-and-place to align microspheres. . . . . . . . . . . . . .. . . . . . . . . 21
2.11 High-speed videography quantifying microsphere trajectories. . . . . . . . . . 22
2.12 Microsphere reveals a curved trajectory during activerelease. . . . . . . . . . . 23
2.13 Gripper recognition. . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . 24
2.14 Visual determination of which gripping arm the microsphere adheres to. . . . . 25
2.15 Vision-based contact detection. . . . . . . . . . . . . . . . . . .. . . . . . . . 25
2.16 Contact detection results. . . . . . . . . . . . . . . . . . . . . . . .. . . . . . 25
2.17 “U OF T” pattern formed by automated microrobotic pick-and-place. . . . . . . 26
2.18 Pattern formation by automated pick-and-place. . . . . .. . . . . . . . . . . . 27
2.19 Microspheres assembled into two-layered structures.. . . . . . . . . . . . . . 27
ix

3.1 Four nanomanipulators with probes installed for manipulation in SEM. . . . . . 32
3.2 Visual recognition of probes and nanowires from SEM visual feedback. . . . . 33
3.3 Principle of vision-based contact detection. . . . . . . . .. . . . . . . . . . . 35
3.4 SEM vision-based control . . . . . . . . . . . . . . . . . . . . . . . . . .. . . 36
3.5 Characterization of a piezo actuator for look-then-move control. . . . . . . . . 37
3.6 Four probes simultaneously move to their target positions on a nanowire. . . . . 38
3.7 Manual operation often causes probe tip damage. . . . . . . .. . . . . . . . . 39
3.8 Automated contact detection and subsequentZ-positioning of a probe. . . . . . 41
3.9 Step responses of the vision-based control system. . . . .. . . . . . . . . . . . 42
3.10 Four probes landing on target positions for four-pointprobe measurement. . . . 43
3.11 Four-point probe measurement results of a nanowire. . .. . . . . . . . . . . . 44
4.1 Schematics of the MEMS device for electromechanical characterization. . . . . 49
4.2 Mechanical model of the device during mechanical characterization. . . . . . . 51
4.3 Circuit diagram of the testing setup during electrical characterization. . . . . . 52
4.4 Microfabrication process flow. . . . . . . . . . . . . . . . . . . . . .. . . . . 53
4.5 MEMS device wire-bonded to a circuit board. . . . . . . . . . . .. . . . . . . 54
4.6 Calibration results of the displacement sensor and force sensor. . . . . . . . . . 55
4.7 Nanowire transfer. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . 58
4.8 Mechanical and electrical characterization results... . . . . . . . . . . . . . . 59
4.9 Effect of e-beam irradiation. . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.1 Commercial nanomanipulation systems. . . . . . . . . . . . . . .. . . . . . . 65
5.2 Load-lock-compatible nanomanipulation system. . . . . .. . . . . . . . . . . 67
5.3 Installation procedure of the nanomanipulation system. . . . . . . . . . . . . . 68
5.4 Quantification of SEM image drift and noise. . . . . . . . . . . .. . . . . . . 70
5.5 Actuator characterization results. . . . . . . . . . . . . . . . .. . . . . . . . . 71
5.6 Encoder characterization results. . . . . . . . . . . . . . . . . .. . . . . . . . 72
x

5.7 Contact detection results. . . . . . . . . . . . . . . . . . . . . . . . .. . . . . 77
5.8 Control system performance. . . . . . . . . . . . . . . . . . . . . . . .. . . . 79
5.9 Nanowire probing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .80
xi

Chapter 1
Introduction
1.1 Background and Motivations
A variety of micro and nanomaterials have been synthesized that exhibit unique mechanical,
electrical, and photonic properties, and have been used as functional elements in device appli-
cations. For example, self-assembly of silica microspheres resulted in a photonic crystal with
a complete three-dimensional bandgap [1]. Semiconductor nanowires were used to construct
nanoelectronic circuits [2], solar cells [3], and nanosensors for the detection of biological and
chemical species [4].
Device construction usually requires the positioning of micro and nanomaterials. Taking
one-dimensional nanomaterials as an example, nanowires/nanotubes need to be positioned be-
tween source and drain electrodes for building nanotransistors and biosensors. To position
relatively large amounts of materials simultaneously, large-scale methods are used, namely,
self-assembly [1], contact printing [5], and dielectrophoresis [6]. However, these methods rep-
resent probabilistic strategies and are not capable of precision control of individual materials.
By contrast, mechanical manipulation, despite being slow in comparison with the afore-
mentioned large-scale methods, promises specificity, precision, and programmed motion, and
thus, can enable the precise manipulation of individual materials. For the manipulation of mi-
1

Chapter 1. Introduction 2
cromaterials, a micromanipulator under an optical microscope is used. The end-effector can be
either a microprobe or a microgripper. Owing to the strong adhesion forces (capillary forces,
electrostatic forces, and van der Waals forces) at the microscale, manipulation is unreliable and
has low repeatability, motivating the development of suitable manipulation tools and strategies.
Different from micromanipulation, manipulation of nanomaterials requires higher-resolution
microscopes, typically atomic force microscopes (AFM) or scanning electron microscopes
(SEM). AFM nanomanipulation can be conducted in either vacuum, ambient, or aqueous en-
vironments. Nonetheless, since AFM uses the same cantilever for both imaging and manipula-
tion [7–9], performing truly simultaneous imaging and manipulation is a challenge. In contrast,
SEM nanomanipulation uses nanomanipulators inside an SEM and is conductedin situ with
video rate imaging.
An important application of SEM nanomanipulation is to characterize the mechanical and
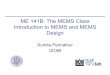
electrical properties of individual nanowires/nanotubes. Figure 1.1(a) shows that two AFM
cantilevers stretch a multi-walled carbon nanotube (MWCNT) for tensile testing [10]. Individ-
ual MWCNTs are first picked up by one cantilever and then attached to the second cantilever.
In Figure 1.1(b), an AFM cantilever buckles a bundle of MWCNTs for mechanical character-
ization [11]. An InGaAs/GaAs nanospring was tensile-tested between a probe and an AFM
cantilever [12], as shown in Figure 1.1(c). Figure 1.1(d) schematically illustrates that a silicon
nanowire is stretched for the characterization of its piezoresistivity. The green-colored probe
is used to push the freestanding cantilever and stretch the suspended silicon nanowire [13].
The two red probes form electrical connections for measuring the resistance changes of the
nanowire during straining.
State-of-the-art SEM nanomanipulation is conducted via teleoperation. An operator moni-
tors the SEM screen and carefully operates a joystick to movea nanomanipulator (thus position
an end-effector) inside an SEM. The operation process is time consuming, skill dependent, and
poor in repeatability. Thus, developing nanorobotic techniques that facilitate this process and
enable automation is desired.

Chapter 1. Introduction 3
(a) (b)
(c) (d)
Figure 1.1: Manipulation of nanomaterials for mechanical and electrical characterization. (a)
A MWCNT was tensile-tested by two AFM cantilevers [10]. (b) Abundle of MWCNTs was
buckled by an AFM cantilever [11]. (c) An InGaAs/GaAs nanospring was stretched between
a probe and an AFM cantilever [12]. (d) A silicon nanowire wasstretched for piezoresistivity
characterization [13].
In addition, the aforementioned nanomaterial characterization techniques [Figure 1.1] rely
on SEM imaging for deformation and force measurements. However, the electron-beam irra-
diation affects the electrical measurement of a nanomaterial. Therefore, it is desirable to have
a testing device that is capable of acquiring all the testingdata electronically without relying
on SEM imaging. Given that MEMS (microelectromechanical systems) actuators and force
sensors can deliver nanometer motion resolutions and nanonewton force resolutions, they can
be used for nanomaterial testing.
Since end-effectors (e.g., nanoprobes or nanogrippers) can be easily damaged during nanoma-
nipulation, they require frequent replacement. The replacement process has two drawbacks
because the high-vacuum chamber of SEM must be opened to access the nanomanipulators.
First, exposing the chamber to air incurs contamination. Second, pumping the chamber again

Chapter 1. Introduction 4
takes a few hours. Therefore, it is desirable to have a nanomanipulation system that does not
require the opening of the high-vacuum chamber for end-effector exchange. Since SEM speci-
mens are transferred through the SEM load-lock, using the load-lock also for nanomanipulator
transfer is a solution.
1.2 Objectives
The objectives of this thesis are:
• To develop a MEMS microgripper to pick and place micro-objects with high repeatabil-
ity, accuracy, and speed, and build a microrobotic system for automated pick-and-place.
• To develop nanorobotic techniques and a MEMS device to characterize the electrical,
mechanical, and electromechanical properties of nanomaterials in SEM.
• To develop a nanomanipulation system that is capable of being transferred through the
load-lock of SEM without opening the high-vacuum chamber.
1.3 Dissertation Outline
An overview of the ensuing chapters is as follows. Chapter 2 presents a MEMS microgrip-
per that is capable of overcoming adhesion forces to releaseadhered micro-objects, and the
demonstration of automated pick-and-place. Chapter 3 presents a nanorobotic system in SEM
for automated four-point probe measurement of nanowires. Chapter 4 presents a MEMS de-
vice for the characterization of piezoresistive properties of nanowires. Chapter 5 presents a
load-lock-compatible nanomanipulation system for use in SEM and the system characteriza-
tion results. Chapter 6 concludes with a summary and contributions of this thesis, and possible
future research directions.

Chapter 2
Pick-and-Place of Micro-Objects Using a
MEMS Microgripper
2.1 Introduction
Physical pick-and-place of micro-objects promises specificity, precision, and programmed mo-
tion, features making micromanipulation amenable to automation for the construction of mi-
crosystems [14–17]. For instance, micromanipulation has been used to build a diamond-shaped
structure by assembling microspheres into a lattice [14]. Based on a combination of microfab-
rication and micromanipulation [16], novel photonic crystals were also demonstrated.
Analogous to manipulation in the macroworld, manipulatingmicrometer-sized objects ne-
cessitates gripping devices with end structures comparable in size to objects to be manipulated.
Enabled by MEMS technologies, many microgripping devices have been reported, including
two-fingered devices [18–28] and multi-fingered devices [29–35].
Despite the availability of MEMS gripping tools and the significant progress made in au-
tomation techniques for eventually autonomous operation,micromanipulation is still largely
skill dependent and entails repeated trial-and-error efforts. Among the challenges, a long-
standing difficulty is the release of micro-objects from the end effector due to strong adhesion
5

Chapter 2. Pick-and-Place ofMicro-Objects Using aMEMS Microgripper 6
forces at the microscale. Force scaling causes surface forces (i.e., adhesion forces) including
the capillary force, electrostatic force, and van der Waalsforce to dominate volumetric forces
(e.g., gravity) [36]. In pursuit of rapid, accurate releasemethods, several strategies have been
proposed in the past decade.
These release techniques can be classified into two categories, passive release and active
release. Passive release techniques depend on the adhesionforces between the micro-object and
the substrate to detach the micro-object from the end effector. In consideration of adhesional
and rolling-resistance factors [37, 38], microspheres were rolled on an Au-coated substrate
for both pick and release, causing the fracture of the microsphere–substrate interface and the
microsphere–tool interface, respectively. Similarly, itwas also demonstrated that substrates
with a ultraviolet cure adhesive [39] or a gel film [40] were used to facilitate release. Another
passive release technique uses the edge of the substrate to scrape the adhered object off the
tool [41]. A commonality of passive release techniques is the dependency on surface properties
of substrates, time-consuming, and poor repeatability.
By contrast, active release methods intend to detach the micro-object from the end effector
without touching the substrate. By applying a voltage between the probe and the substrate
[42–45], an electric field was created to detach the object from the probe. Nevertheless, this
method requires the micro-object, the probe, and the substrate all to be conductive. More
importantly, the released micro-objects landed at random locations on the substrate, resulting
in a poor release accuracy.
The second type of active release makes use of mechanical vibration [46, 47]. Requiring
a large bandwidth of the manipulator, the vibration-based method takes advantage of inertial
effects of both the end effector and the micro-object to overcome adhesion forces. Therelease
process has been modeled and simulated to predict the landing radius of the released object
[48]; however, the accuracy has not been experimentally quantified. The third type of active
release employs vacuum-based tools [49] to create a pressure difference for pick and release.
However, miniaturization and accurate control of vacuum-based tools can be difficult, and its

Chapter 2. Pick-and-Place ofMicro-Objects Using aMEMS Microgripper 7
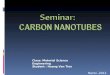
Figure 2.1: SEM image of a three-pronged microgripper capable of both grasping and active
release.
use in a vacuum environment can be limited. Finally, micro peltier coolers were used to form
ice droplets instantaneously for pick-and-place of micro-objects [50–52]. Thawing of the ice
droplets was used to release objects. The freezing-heatingapproach requires a bulky, complex
end effector and is limited to micromanipulation in an aqueous environment.
In summary, no techniques exist for easy, rapid, accurate, and highly repeatable release of
micro-objects in micromanipulation. This chapter presents an active release strategy using a
MEMS microgripper that integrates a plunging structure between two gripping arms, as shown
in Figure 2.1. While this method retains the advantage of double-ended tools for picking up
micro-objects, the plunger is capable of thrusting a micro-object adhered to a gripping arm to
a desired destination on a substrate, enabling highly repeatable release with a high accuracy of
0.45±0.24µm.
This chapter also presents the theoretical analyses of the micromanipulation process in
order to understand the microphysics behind this active release technique. All the results in this
chapter were obtained under an optical microscope with 7.5–10.9µm borosilicate microspheres
on glass and steel substrates in an ambient environment. No surface treatments were conducted

Chapter 2. Pick-and-Place ofMicro-Objects Using aMEMS Microgripper 8
to the microspheres, microgripper, or substrates.
Enabled by the grasping and release capabilities, a microrobotic system is built that achieved
fully automated pick-and-place of microspheres at a speed of 10 spheres/min. This speed is
an order of magnitude higher than the highest speed reportedin the literature [53]. Image pro-
cessing is used to recognize features such as the gripping arms and microspheres. The system
detects the contact between the microgripper and the substrate purely through visual feed-
back without using additional force/touch sensors. Automated pick-and-place was performed
through vision-based control.
2.2 Three-Pronged Microgripper
Figure 2.2 shows a schematic of the microgripper. The monolithic device integrates three elec-
trostatic microactuators for driving two normally open gripping arms as well as a plunger for
active release. In this design, electrostatic actuation was chosen over electrothermal actuation
because temperature rise of the gripping arms can influence adhesion forces [54] and reduce the
consistency of device performance. Furthermore, electrostatic actuation was also chosen for
driving the plunger because it exhibits a much higher bandwidth than electrothermal actuators
and is able to deliver a much faster speed, representing an important advantage for thrusting
off an adhered micro-object.
This design is different from existing microgrippers that have either only oneactively actu-
ated gripping arm [20–22] or two interdependently active gripping arms [18]. Since to which
gripping arm a micro-object adheres is random, both gripping arms in our design have an inde-
pendent actuator for positioning the adhered object to properly align to the plunger for release.
Structural parameters of the microgrippers are shown in Table 2.1. The thickness of the grip-
ping arms and actuators is 25µm, the thickness of the device layer. The initial opening between
the gripping arms is 17µm, intended to accommodate microspheres of around 10µm in diam-
eter. The widths of the gripping arm tips (6µm) and plunger tip (8µm) are slightly smaller

Chapter 2. Pick-and-Place ofMicro-Objects Using aMEMS Microgripper 9
comb drives
plunger
left gripping arm right gripping arm
3.0 mm
4.5 mm
flexure
Figure 2.2: Microgripper schematic.
than the microsphere to be grasped so that the microgripper does not contact microspheres in
proximity. The number of combs for each gripping arm is 280 toensure the gripping arms can
be fully closed at an actuator voltage of 60 V, according to the electrostatic force calculation
results. The number of combs for the plunger is 540 to ensure the plunger tip can pass the
gripping arm tips at an actuator voltage of 60 V.
The devices were microfabricated using a modified DRIE on SOIprocess [21] with a 25
µm thick device silicon layer, as illustrated in Figure 4.4. Two-step DRIE etching of the handle
layer creates a step difference between the central suspended structure and the device frame,
which greatly reduces the risk of device breakage during device operation and handling. Figure
2.4 shows the experimentally characterized device performance as well as fitted lines.
The device also permits experimentally estimating adhesion forces between the gripping
arms and a grasped microsphere. After the microsphere is gently but securely grasped, the
actuation voltages for the gripping arms are released in a continuous and synchronous manner
until the voltage,V2 at which the gripping arms are opened is obtained. The adhesion forces
can then be estimated as
F =12
Nǫtb
(
V21 − V2
2
)
, (2.1)
whereǫ is the permittivity of air,N is the number of comb finger pairs,t is the comb fin-

Chapter 2. Pick-and-Place ofMicro-Objects Using aMEMS Microgripper 10
Table 2.1: Structural Parameters of the Microgrippers
parameter value
device Si layer thickness (t) 25µm
width of gripping arm tips 6 µm
width of plunger tip 8 µm
initial opening of gripping arms 17µm
gap between opposing comb fingers (b) 4 µm
finger pair number of each gripping arm 280
finger pair number of plunger 540
width of all flexible beams 5 µm
length of flexible beams of gripping arms 580µm
number of flexible beams of each gripping arm2
length of flexible beams of plunger 630µm
number of flexible beams of plunger 4
Figure 2.3: Microfabrication process.

Chapter 2. Pick-and-Place ofMicro-Objects Using aMEMS Microgripper 11
0 1000 2000 3000 4000 5000voltage squared (V2)
0
4
8
dis
pla
cem
ent
(µm
)
gripping arms
plunger
Figure 2.4: Characterized microactuator performance.
ger thickness,b is the gap between opposing comb fingers, andV1 is the voltage applied to
both gripping arms for creating a gap of the size of the micro-object. Note that when the ini-
tial grasping force applied to the micro-object is increased, the actuation voltageV2 required
for opening the gripping arms becomes smaller, resulting ina larger estimate of the adhesion
forces. Despite the initial grasping force variations as well as microfabrication induced imper-
fections, the adhesion forces obtained through this actuation force estimation proved useful for
understanding purposes.
2.3 Force Analysis
Adhesion forces in an ambient environment include three types of attractive forces, namely,
the van der Waals force, the electrostatic force, and the capillary force, all of which depend on
the separation distance,δ, between a microsphere and a flat surface it adheres to. Figure 2.5
shows a microsphere adhered to a flat surface with surface roughness exaggerated.
Van der Waals forces are caused by the instantaneous polarization of atoms and molecules
due to quantum mechanical effects. The van der Waals force between a microsphere and a flat
surface is [55]
Fvdw =
(
δ
δ + r/2
)2 (
Hd16πδ2
+Hρ2
8πδ3
)
, (2.2)
wherer is the roughness of the flat surface,H is the Lifshitz-van der Waals constant which

Chapter 2. Pick-and-Place ofMicro-Objects Using aMEMS Microgripper 12
θrK
liquid meniscusrough surface
normal force
adhesion forces
δ
Figure 2.5: Adhesion forces acting on a microsphere on a rough surface.
ranges from 0.6 eV for polymers to 9.0 eV for metals,d is the microsphere diameter, andρ is
the radius of the adhesion surface area.
To estimate the van der Waals force between a 10µm borosilicate microsphere and the
sidewall of a gripping arm,δ is assumed to be 0.35 nm [54],ρ is assumed to be 0.65% of the
radius of the microsphere [54],H is assumed to be 7.5 eV [54], andr is assumed to be 100 nm.
Thus, the van der Waals force is calculated to be 1.51×10−4 µN.
The electrostatic force for microspheres smaller than 100µm is predominantly the electro-
static double layer force, which is [56]
Felec=πǫdU2
2δ, (2.3)
whereǫ is the permittivity of air, andU is the voltage difference between the microsphere and
the flat surface. WhenU is assumed to be 0.40 V [54], the electrostatic force betweena 10µm
microsphere and the sidewall of a gripping arm is calculatedto be 6.36×10−2 µN.
The third type of attractive force is the capillary force, which is composed of the capillary
pressure force and surface tension force [57, 58]. The capillary pressure force dominates the
surface tension force for microspheres larger than 1µm [57]. For the microsphere-plane model,
the capillary force is [59,60],
Fcap=2πdγ cosθ
1+ δ/(2rK cosθ − δ), (2.4)

Chapter 2. Pick-and-Place ofMicro-Objects Using aMEMS Microgripper 13
whereγ is the liquid surface tension, which is 0.073 Nm−1 for water at 22°C,θ is the contact
angle of the meniscus with the microsphere, andrK is the Kelvin radius, which is defined as
the mean radius of the curvature of the liquid-vapor interface.
For estimating the capillary force exerted on a 10µm microsphere by a water meniscus at
room temperature,θ is assumed to be 10, δ is still assumed to be 0.35 nm as for the calculation
of the van der Waals force, andrK is assumed to be 1 nm. The capillary force is calculated to
be 3.71µN.
For comparison purposes, the gravity of the 10µm microsphere is calculated to be 1.31×10−5
µN, using the density of borosilicate glass, 2.55 g/cm3. In summary, the pecking order is
Fcap≫ Felec≫ Fvdw ≫ Fgrav . (2.5)
It can be seen that the van der Waals force is the smallest among the three attractive forces.
The van der Waals force heavily depends on the roughness of the surface. Since devices were
formed through deep reactive ion etching, which produces scallop structures on the sidewalls
of the gripping arms, the rough surface makes the van der Waals force negligible. The electro-
static force depends on voltage differences, which are difficult to accurately estimate when the
microsphere is nonconductive. Unlike the van der Waals force and electrostatic force, neither
of which requires physical contact, the capillary force in the air results from a phenomenon
called capillary condensation [56]. Liquid from the vapor phase condenses between sufficient-
ly close asperities and forms menisci that cause the capillary force. Thus, there exists a working
range, beyond which the capillary force as well as the liquidmenisci disappear.
Schematic diagrams in Figure 2.6 illustrate forces exertedon a microsphere by the gripping
arms and/or the substrate during grasping and release. Figure 2.6(a)-(c) are drawn from the
side view, and Figure 2.6(d)-(f) are from the top view. Figure 2.6(a) shows the microgripper
approaches the microsphere and uses the gripping arm to laterally push it in order to break the
adhesion bond between the microsphere and the substrate.Fs is the adhesion forces, andNs is
the normal force from the substrate.Nr is the lateral pushing force applied by the right gripping
arm, andFr is the adhesion forces from the gripping arm in the normal direction. Upon the

Chapter 2. Pick-and-Place ofMicro-Objects Using aMEMS Microgripper 14
Nr
fs
Fr
Ns
Fs
(a)
Msfr NrFl Nl Fr
Ns
Fs
(b)
NrFl Nl Fr
Ns
Fs
(c)
frfl
NrFl Nl Fr
(d)
Nr Fr
(e)
Nr Fr
Np
fr
Fp
Mr
(f)
Figure 2.6: Analysis of forces during grasping and active release.
application ofNr, the stress distribution in the contact area between the microsphere and the
substrate becomes nonuniform, which creates a rolling resistance moment,Ms [61,62]. Besides
the adhesion forcesFs and Fr that are normal to the flat surfaces,fs and fr are additional
capillary forces from the substrate and the gripping arm, respectively.fs ( fr) resists the relative
motion between the microsphere and the substrate (grippingarm), through the menisci. In this
situation, the total capillary forces from the substrate and gripping arm are not perpendicular
to the flat surfaces.
After the microsphere is moved laterally from its original position, the two gripping arms
close and grasp it, as shown in Figure 2.6(b). The normal force and adhesion forces,Nl andFl,

Chapter 2. Pick-and-Place ofMicro-Objects Using aMEMS Microgripper 15
are from the left gripping arm. Similarly,Nr andFr, are from the right gripping arm. Besides
Fl and Fr, there can also be additional capillary forces parallel to the substrate surface and
gripping arm surface, although they are not shown in the diagram for clarity.
The microgripper is then raised, as shown in Figure 2.6(c) tolift up the microsphere. The
additional capillary forces from the gripping arms,fl and fr, overcome the adhesion forces
from the substrate,Fs, which decreases gradually as a function of the distance between the
microsphere and the substrate.
When the microsphere is up in the air (Figure 2.6(d)), the adhesion forces from the sub-
strate become negligible. Upon reaching a desired destination, the gripping arms are opened,
during which all of the adhesion forces and normal forces from the gripping arms decrease.
Consequently, the microsphere separates from one grippingarm and keeps adhering to the
other gripping arm by adhesion forces, as shown in Figure 2.6(e).
For release, the gripping arm with the adhered microsphere is properly positioned relative to
the plunger, as shown in Figure 2.6(f). The plunger is then controlled to move forward to thrust
out and collide with the microsphere. The microsphere eventually escapes from the adhesion
forces from the gripping arm by its own inertia and lands on the substrate. In Figure 2.6(f),Np
is the pushing force applied by the plunger,Fp is the adhesion forces from the plunger, andMr
and fr are respectively the rolling resistance moment and additional capillary force from the
gripping arm.
2.4 Experimental Results and Discussion
The experimental setup (Figure 2.7) consists of an optical microscope (Motic PSM-1000) with
a CMOS camera (Basler A601f). A custom-made circuit board with a wire bonded microgrip-
per was mounted on a 3-DOF micromanipulator (Sutter MP285) at a tilting angle of 25.
Borosilicate glass microspheres (diameters: 7.5–10.9µm) were manipulated at room tem-
perature of 22°C with relative humidity of 50±5%. A droplet of microspheres in isopropanol

Chapter 2. Pick-and-Place ofMicro-Objects Using aMEMS Microgripper 16
Figure 2.7: Experimental setup for micrograsping and active release tests. Inset shows a wire
bonded microgripper.
was micropipetted onto the substrate and let dry in air. The surface tension of isopropanol
(0.021 N/m at room temperature) is smaller than that of water. However, due to the volatility
of isopropanol and because the microspheres were let dry in air for a prolonged period, water
was assumed to constitute most of the liquid menisci betweenthe microspheres and the sub-
strate. Therefore, the surface tension of water was used in (2.4) in Section 2.3 for estimating
the capillary force.
Two types of substrates, wipe cleaned with isopropanol and let dry in air, were used in
the experiments, including an electrically conductive substrate (steel) and a non-conductive
substrate (glass). These two substrates were expected to exert different electrostatic forces and
van der Waals forces on the microsphere while it is travelingin air during release, which might
affect the release accuracy.
2.4.1 Repeatability of Active Release
After the gripping arms opened, the microsphere randomly adhered to a gripping arm in all
cases. The overall adhesion forces between the gripping arms and microsphere were estimated

Chapter 2. Pick-and-Place ofMicro-Objects Using aMEMS Microgripper 17
to be 3.6µN to 5.8µN through measuring actuation voltages required to open thegripping
arms after a gentle yet secured grasping of a microsphere, asdescribed in (2.1) in Section 2.3.
For successful release, the microsphere must gain a sufficient amount of momentum from
the collision with the plunger in order to overcome the adhesion forces. The speed of the
plunger can be varied by controlling the rising profile of theactuation voltage. When a sharp
increase in actuation voltage was applied to the plunger (e.g., from 0 V to 50 V within 0.1 s),
release of the microsphere was guaranteed (i.e., 100% success rate,n=700). A high plung-
ing speed alleviates careful sample preparation requirements (e.g., baking) or environmental
control requirements (e.g., humidity). Quantification using high-speed videography (13,000
frames/sec) revealed that a plunging speed of 65.24mm/sec produced a microsphere speed of
105.01 mm/sec with a momentum of 1.40×10−13 kg·m/s. This plunging speed guaranteed the
successful release for all trials. High-speed videographyalso demonstrated that a micro sphere
was separated from the plunger upon impact.
2.4.2 Quantification of Release Performance
To quantitatively characterize the release performance, single microspheres were repeatedly
picked and released from different heights (2–30µm) above the substrate. Figure 2.8(a) shows
representative data of landing positions on a glass substrate. The results show a fairly linear and
predictable relationship between landing positions and heights from the substrate, indicating
that forces including the van der Waals forces and the electrostatic forces from both the sub-
strate and the microgripper, as well as the gravitational force, do not have a significant effect
on the high-speed microsphere that travels a short distancein air.
Figure 2.8(a) also shows that the precision of landing is inversely proportional to the height
from the substrate. When the height was over 20µm, random landing locations were observed,
which should be partly due to the more pronounced air flow effect. To investigate the influence
of substrate differences on release performance, experiments were also repeated using a steel
substrate. Compared to data in Figure 2.8(a), results shownin Figure 2.8(b) confirm that the

Chapter 2. Pick-and-Place ofMicro-Objects Using aMEMS Microgripper 18
0 10 20 30x (µm)
20
40
60
y(µ
m)
h = 2µm
h = 5µm
h = 10µm
(a)
0 10 20 30x (µm)
20
40
60
y(µ
m)
h = 2µm
h = 5µm
h = 10µm
(b)
Figure 2.8: Landing positions of microspheres.h is the height of the gripping arms from above
the substrate. (a) Glass substrate. (b) Steel substrate.
active release approach does not have observable substratedependence.
As mentioned earlier, adherence of the microsphere to whichgripping arm is random. Fig-
ure 2.8(a)(b) show experimental data collected when the microspheres adhered to the right
gripping arm. Similar data were captured but not shown for microspheres that adhered to the
left gripping arm.
Given the above findings, the release height was set to 2µm above the substrate for quanti-
fying release accuracy. The small distance of 2µm from the substrate reduces the distance/time
the microsphere travels in air, making the landing locationless sensitive to environmental dis-
turbances. Figure 2.9 shows the recorded landing positionsof the microsphere, proving an
accuracy of 0.70±0.46µm. A summary of the characterized release accuracy is given in Table
2.2. The 0.55µm standard deviation of landing positions can be due to either (1) slight vari-
ations of initially adhered lateral and/or vertical positions of the microsphere on the gripping
arm or (2) imperfect control of the microgripper height above the substrate.
By using an automated substrate contact detection method (Section 2.5.2) to accurately
control the release height, the release accuracy was further improved to 0.45±0.24µm.
Besides a high accuracy, the active release technique enables easy, fast pick-and-place op-

Chapter 2. Pick-and-Place ofMicro-Objects Using aMEMS Microgripper 19
−1 1
−2
2
y(µ
m)(a)
x (µm)
−1 1
−2
2
y(µ
m)(b)
x (µm)
−1 1
−2
2
y(µ
m)(c)
x (µm)
−1 1
−2
2
y(µ
m)(d)
x (µm)
Figure 2.9: Landing positions of microspheres when the gripping arms were placed 2µm above
the substrate. (a)(b) Glass substrate. (c)(d) Steel substrate. (a)(c) Microspheres adhered to the
left gripping arm. (b)(d) Microspheres adhered to the rightgripping arm.
eration in micromanipulation. Figure 2.10 shows the resultof a series of pick and release of
microspheres. While grasping was manually conducted, which is skill dependent, positioning
the microsphere properly for plunging was rapid and took less than 1 s with the use of cali-
bration results shown in Figure 2.4. The actual release takes 0.17 ms, according to high-speed
videography.

Chapter 2. Pick-and-Place ofMicro-Objects Using aMEMS Microgripper 20
Table 2.2: Summary of Release Accuracy
glass substrate steel substrate
release accuracyrelease accuracy
microspheres adhered0.70± 0.46µm 0.67± 0.55µm
to left arm (n = 18) (n = 18)
microspheres adhered0.64± 0.46µm 0.67± 0.55µm
to right arm (n = 18) (n = 20)
2.4.3 Understanding the Curved Trajectory
Interestingly, it can be seen from Figure 2.8 that the microspheres all landed to the right/left side
of the plunger (plunger was along they axis) depending on which gripping arm they adhered
to. High-speed imaging verified that the flying path of the microsphere was indeed curved.
Images shown in Figure 2.11 were taken through high-speed videography when the gripping
arms were 20µm above the substrate before the release of the microsphere.
According to the brief force analysis in Section 2.3, the vander Waals force and elec-
trostatic force decrease with increased distances betweenthe microsphere and gripping arm.
Additionally, the capillary force vanishes beyond a certain distance. Thus, it is assumed that
the gripping arm has an adhesion force effective region around it, as indicated by dashed lines
in Figure 2.12.
During release, the plunger first impacts the microsphere along the sidewall of the gripping
arm at a high speed as shown in Figure 2.12(a), where the dotted lines represent the adhesion
force effective region. When the traveling microsphere approaches the gripping arm corner,
which was rounded by deep reactive ion etching, the adhesionforces create a radial acceleration
towards the corner, which curves its travel direction. While the microsphere is within the
adhesion force effective region, there exists resistancefr (additional capillary force) in the
tangential direction caused by menisci. Eventually, the microsphere leaves the gripping arm

Chapter 2. Pick-and-Place ofMicro-Objects Using aMEMS Microgripper 21
20m
(b) (c)
(d) (e)
(a)
(f)
active release
Figure 2.10: Pick-and-place to align microspheres (7.5µm to 10.9µm). Note that the micro-
gripper was titled 25. (a) The microgripper approaches a microsphere, and uses one gripping
arm to laterally push it to break the initial adhesion bond between the microsphere and the
substrate. (b) Two gripping arms are closed, grasping the microsphere and lifting it up. (c)
The microsphere is transported to the target area where somemicrospheres have already been
aligned. (d) The gripping arms are opened and the gripping arm that the microsphere adheres
to positions the microsphere properly to the right positionin relation to the plunger. (e) The
plunger thrusts out the microsphere that lands accurately on the substrate. (f) Microgripper
retracts to repeat the pick-and-place process.
tip and hence the adhesion force effective region. It then travels straightly and lands on the
substrate, as depicted in Figure 2.12(b).

Chapter 2. Pick-and-Place ofMicro-Objects Using aMEMS Microgripper 22
Figure 2.11: High-speed videography (13,000 frames/second) quantifying microsphere trajec-
tories upon release from a height of 20µm above the substrate.
2.5 Microrobotic Pick-and-Place of Microspheres
2.5.1 Recognition of Microgripper and Microspheres
The microspheres on the substrate were recognized using a Hough transform to determine their
centers and radii. Contours formed from Canny edge detection readily recognize the gripping
arms and the plunger. As shown in Figure 2.13(a), M1, M2, and M3 denote the centroids of the
two gripping arms and the plunger. By comparing they coordinates of their centroids, the left
gripping arm, right gripping arm, and plunger were distinguished.
Minimum bound rectangles (MBRs) were used to further define the positions of the two
gripping arms, as shown in Figure 2.13(a). Point D was then taken as the overall position of
the microgripper, which is the intersection of the horizontal line going through the plunger
centroid, M3, and the line connecting the left adjacent corners of the topand bottom MBRs.
To attain secured grasping, the system aligns the grasping position of the gripping arms with
respect to a microsphere, as illustrated in Figure 2.13(b) whereg is the width of the gripping
arm (denoted byk in Figure 2.13(a)).r is the radius of the microsphere. The contact position of
the gripping arm with the microsphere is on the segment AB. Inparticular, the middle position

Chapter 2. Pick-and-Place ofMicro-Objects Using aMEMS Microgripper 23
Np
Fp
Nr
Fr
gripping arm
plunger
vv1
v2
fr
(a)
gripping armplunger
v
α
destination
(b)
Figure 2.12: Microsphere reveals a curved trajectory during active release. (a) The plunger
thrusts the microshphere that reaches the roundish corner of the gripping arm. (b) The micro-
sphere escapes from the effective range of the adhesion forces. The trajectory is drawnunder
the assumption that there are no disturbances when the microsphere is in the air.
C provides the most security for grasping when microspheresslide during grasping (Figure
2.13(b)). According to the geometry, the distance from the microgripper position D to the
optimal grasping position C isl = t sinα + g2 cosα − r cotα, which is a function of the size of
the microsphere to be grasped.
When the gripping arms open, the microsphere randomly adheres to one of the two gripping
arms. As shown in Figure 2.14, the boundary of the gripping arm to which the microsphere
adheres is connected with that of the plunger. Thus, only twocontours are detected with the
larger contour containing the microsphere. By comparing the y coordinates of the centroids
of the contours (M1 and M2 in Figure 2.14), the system determines to which gripping armthe
microsphere adheres.
2.5.2 Contact Detection and Microrobotic Control
Knowledge of relative depth positions of the gripping arms and microsphere is gained through
the detection of the contact between the gripping arms and the surface of the substrate. Ob-

Chapter 2. Pick-and-Place ofMicro-Objects Using aMEMS Microgripper 24
r
A C BD
l
k
g
t
α
(b)
Figure 2.13: (a) Recognized gripping arms and plunger. (b) Sidewall of a gripping arm for
determining the secured grasping position, C. (c) 3D schematic showing the grasping of a
microsphere.
viating the need for additional force/touch sensors, the system employs a vision-based contact
detection algorithm [63] that provides a detection accuracy of 0.2 µm. The contact detection
process completes within 5–8 seconds.
The microgripper was controlled to move downwards at a constant speed (e.g., 20µm/sec)
to establish contact with the substrate while the algorithmran in real time. Since further low-
ering the gripping arms after the contact is established causes the gripping arms to slide on
the substrate (Figure 3.3), monitoring thex coordinates of the gripping arms result in a V-
shaped curve, as shown in Figure 2.16. The global minimum represents the initial contact of
the microgripper with the substrate.
The microrobotic system is a “looking-and-moving” system.Transformation between the
image frame (x-y) and the microrobot frame (X-Y) was achieved with calibrated pixel sizes.

Chapter 2. Pick-and-Place ofMicro-Objects Using aMEMS Microgripper 25
Figure 2.14: Visual determination of which gripping arm themicrosphere adheres to after the
gripping arms open.
substrate
X
Z
gripping arm(upon contact)
gripping arm(sliding)
Figure 2.15: Vision-based contact detection. Gripping arms slide on the substrate after contact
is established.
38
40
42
44
46
48
x(p
ixel
)in
imag
efr
ame
0 10 20 30 40 50 60 70 80image number
contactpoint
Figure 2.16: Contact detection by monitoringx coordinate of a gripping arm in the image while
lowering the microgripper at a speed of 20µm/sec.

Chapter 2. Pick-and-Place ofMicro-Objects Using aMEMS Microgripper 26
50 m µ
Figure 2.17: “U OF T” pattern formed by automated microrobotic pick-and-place of 7.5–10.9
µm microspheres.
With the centroid and radius of a target microsphere recognized, the microrobot moves the
microgripper to the target position via a PID controller.
2.5.3 Automated Pick-and-Place of Microspheres
To quantify the operation speed of the microrobotic system,microspheres were picked and
placed to form patterns. The system starts with the contact detection to determine the depth
position of the gripping arms relative to the substrate surface. The microgripper was then
moved upwards by 15µm above the substrate, ready for the pick-and-place operation.
Microspheres in the field of view were visually recognized. Their positions in the image
frame, sizes, and optimal grasping positions were determined. Then, by using the contact
detection result and coordinate transformation, the target X-Y-Z positions were determined by
the system. The microspheres were picked up from the source area in the order of theirx
coordinates in the image frame. According to the actuation calibration results (Figure 2.4),
the system determined actuation voltages for the gripping arms for secured grasping while
ensuring no excessively large actuation voltages were applied.
The microrobot lifted the securely grasped microsphere to 15µm above the substrate. When
a pre-planned target position was reached, the microrobot moved downwards and stopped at 2
µm above the substrate for release. The gripping arm to which the microsphere adhered was
first visually detected and then aligned the microsphere accurately in front of the plunger based

Chapter 2. Pick-and-Place ofMicro-Objects Using aMEMS Microgripper 27
Figure 2.18: Pattern formation by automated pick-and-place. (a) Microspheres before pick-
and-place. (b) A circular pattern with circularity of 0.52µm.
Figure 2.19: Microspheres assembled into two-layered structures.
on the calibration results shown in Figure 2.4. The plunger was then actuated to release the
microsphere, after which the microgripper was raised 15µm above the substrate and return to
the source area for picking up the next microsphere. Figure 2.18 shows that microspheres were
arranged into a circular pattern with a circularity of 0.52µm, which is defined as the standard
deviation of the distances from the microspheres to the center of the circle. Figure 2.17 shows
an assembled “U OF T” pattern. The average pick-and-place speed was 10 spheres/min.
2.5.4 Three-Dimensional Assembly of Microspheres
The technique can be extended to building three-dimensional structures (e.g., Figure 2.19). The
difficulty involved in such tasks is that the microgripper tips, when positioning a microsphere

Chapter 2. Pick-and-Place ofMicro-Objects Using aMEMS Microgripper 28
for release, may collide with other microspheres in close proximity. To overcome this difficulty,
a rotational degree of freedom is required in the system, either for the substrate and thus the
microspheres, or for the microgripper to avoid collision between the microgripper tips and
microspheres.
2.6 Conclusions
This chapter presented a new MEMS microgripper that integrates both gripping and release
mechanisms. The microgripper was applied to the grasping and active release of microspheres.
The plunger provides the microsphere with sufficient momentum to overcome adhesion forces,
resulting in highly repeatable release (100% of 700 trials)and a release accuracy of 0.45±0.24
µm. The tested borosilicate microspheres varied from 7.5µm to 10.9µm in size. Within this
size range, release accuracy was found independent of microsphere sizes. Release performance
was also found independent of electrical conductivity of substrates (steel and glass). Consider-
ing structural dimensions of the present device (e.g., thickness of gripping arms and plunger:
25 µm and initial gripping arm opening: 17µm), we speculate that the reported release accu-
racy should be consistent for microspheres ranging from a few micrometers up to 17µm. This
study revealed that the most important operating parameters are plunging speed and the height
from the substrate. The highly controllable active releasecapability represents an important
progress for reliable pick-and-place micromanipulation.
Enabled by this releasing technique, an automated robotic pick-and-place system was real-
ized using vision-based techniques for the recognition of the microgripper and microspheres,
determining the height of the microgripper above the substrate, and motion control of the mi-
cromanipulator. The system demonstrated a pick-and-placespeed of 6 spheres/min, which is
much faster than a skilled operator and an order of magnitudefaster than the highest speed
reported in the literature thus far. Three-dimensional structures were also built with micro-
spheres, demonstrating the capability of three-dimensional assembly.

Chapter 3
Automated Four-Point Probe
Measurement of Nanowires in SEM
3.1 Introduction
Using electron microscopy as an imaging platform, nanomanipulation inside a scanning elec-
tron microscope (SEM) has been employed to maneuver and characterize the properties of
nanomaterials. For instance, carbon nanotubes, InGaAs/GaAs nanosprings, and silicon nanowires
were deformed via a nanomanipulator inside an SEM to characterize their mechanical and/or
electrical properties [10–13, 64, 65]. Through nanomanipulation, nanomaterials were also
placed on MEMS devices for tensile testing [66–70].
To date, SEM nanomanipulation has largely been performed manually by an operator using
a joystick and/or a keypad while constantly monitoring SEM images, which istime-consuming,
skill-dependent, and often breaks end-effectors. As this technology becomes increasingly
relevant for device prototyping [11, 71–75] as well as the aforementioned material testing at
the nanometer scale, progress is being made toward automated nanomanipulation in order to
achieve high reliability, efficiency, and repeatability.
Existing nanomanipulators are driven by piezoelectric actuators and usually have only three
29

Chapter 3. Automated Four-Point ProbeMeasurement of Nanowires in SEM 30
translational degrees of freedom. Because of creep, drift,and hysteresis of piezoelectric actu-
ators, open-loop control cannot suffice in precision for automatic nanomanipulation tasks, ne-
cessitating feedback control. Integrating position sensors (e.g., optical encoders or capacitive
sensors) appears to be a straightforward solution and has been achieved for a few commercial
nanomanipulators manufactured by, for example, SmarAct GmbH and Attocube Systems AG.
However, the integration of high-resolution encoders increases the cost significantly; further-
more, sensor drift can be significant at the nanometer scale.Thus, visual feedback from SEM
becomes essential for closed-loop control of nanomanipulators with/without encoders.
To visually obtain theXY position of an end-effector, visual tracking of the end-effector
in a sequence of SEM images has been implemented using feature-based methods [76, 77] or
correlation-based methods [76, 78]. For example, a rigid-model-based visual tracking method
was reported, which applies domain-specific constraints and was evaluated by tracking a mi-
crogripper inside an SEM [78]. Based on SEM visual tracking,visual servo control can be
realized to control the in-plane position of the nanomanipulator, which, however, has not been
reported in the literature.
Besides position control alongXY, precise positioning along thez axis is also essential but
more challenging since it is difficult to extract depth information from SEM visual feedback.To
address this issue, a few techniques were proposed. The depth-from-focus method commonly
used under an optical microscope was extended to SEM for a coarse estimate of theZ position
of an end-effector [79]. A touch sensor based on piezoelectric ceramics [79] and a shadow-
based depth detection method [80, 81] were used for a fine estimate of theZ position. MEMS
capacitive sensors for contact detection under optical microscopes [82] can also be used inside
an SEM. However, the precisions of these methods have not been quantified.
In addition, stereoscopic SEM images can be generated by tilting the electron beam [83],
which requires the installation of specialized hardware and needs more thorough studies in
order to be used for automated nanomanipulation. Tilting the specimen stage can also be
used for SEM stereoscopy [84], but has not been evaluated fornanomanipulation purposes. In

Chapter 3. Automated Four-Point ProbeMeasurement of Nanowires in SEM 31
summary, a convenient technique is needed which is capable of precisely estimatingZ positions
or detecting contact between an end-effector and a substrate.
In this chapter, automated nanomanipulation is demonstrated inside an SEM by perform-
ing a well-structured nanomanipulation task for probing the electrical properties of individual
nanowires. Four-point probe measurement of nanomaterialshas been reported using scan-
ning tunneling microscopy inside an SEM [85–87], using four-probe devices [88–91], and
using focused ion beam deposition or electron beam lithography to pattern electrodes [92,93].
Nonetheless, existing techniques require expensive equipment and lack flexibility; moreover,
they all entail tedious trial-and-error manual operation.
The nanomanipulation system controls four nanomanipulators inside an SEM to realize au-
tomated four-point probe measurement on individual nanowires lying on a substrate. Nanowires
as well as nanoprobes installed on the nanomanipulators arevisually recognized from SEM
imaging. TheXY positions of the nanoprobes are controlled via look-then-move control fol-
lowed by visual servo control. Their contact with the substrate is also detected via visual
feedback. Current–voltage (I–V) data of tin oxide nanowires are obtained after the nanoprobes
positioned on the nanowires.
3.2 Automated Nanomanipulation inside SEM
3.2.1 Nanomanipulation System
A nanomanipulation system (Zyvex S100) is integrated into an SEM (Hitachi S-4000) by
mounting its head assembly onto the specimen stage of the SEM. The head assembly, as shown
in Figure 3.1, is composed of four quadrants of 3-DOF nanomanipulators, each of which is
composed of a coarse positioning stage and a fine positioningunit. The coarse positioning
stage contains three identical piezoelectric slip-stick motors, each of which has a travel of 12
mm with 100 nm resolution. The fine positioning unit containsa piezoelectric tube having
travel ranges of 10µm along the axis of the tube and 100µm along each of the two transverse

Chapter 3. Automated Four-Point ProbeMeasurement of Nanowires in SEM 32
Figure 3.1: Four nanomanipulators with probes installed for manipulation in SEM.
directions with 5 nm nominal resolution.
The nanomanipulators do not have integrated position sensors for either coarse or fine po-
sitioning, as in most commercial and academic nanomanipulation systems. In Figure 3.1, each
nanomanipulator has a tungsten probe installed as an end-effector for interacting with the spec-
imen placed at the center of the specimen stage. The probes have direct electrical connections
to an interface located outside the SEM for applying or measuring electrical signals. Prior to
loading the probes into the nanomanipulators, the probes are chemically cleaned to remove the
native tungsten oxide using KOH solutions and HF. After the cleaning procedure, the probe
tips are 150–200 nm in diameter.
SnO2 nanowires being probed in this chapter are synthesized for use as anode materials in
Li-ion batteries. The nanowires are prepared by the CVD (chemical vapor deposition) method
in a horizontal quartz tube. Sn powder is chosen as the starting material and is loaded in a
ceramic boat. The ceramic boat is placed in the center of a quartz tube mounted in an electric
furnace. A silicon wafer with a Au film of 5 nm thick is placed close to the starting powder.
An Ar flow is introduced into the furnace as the gas carrier. The furnace is heated up to 700 °C,
which is maintained for two hours. Finally, the furnace is cooled down to the room temperature
under the Ar atmosphere. The nanowires are scratch-removedand placed on a SiO2-covered
silicon substrate. Consequently, the nanowires lie directly on the substrate surface, which

Chapter 3. Automated Four-Point ProbeMeasurement of Nanowires in SEM 33
Figure 3.2: Visual recognition of probes and nanowires fromSEM visual feedback. (a) Four
probes and nanowires. (b) Probes and nanowires are recognized from image processing.
constitutes a well-structured manipulation condition andmakes automated probing possible.
3.2.2 Recognition of Probes and Nanowires
When the four probes and one or multiple nanowires are in the field of view [Figure 3.2(a)],
they are visually recognized and identified [Figure 3.2(b)]. The contours of the objects in the
image are recognized through a sequence of low-pass Gaussian filtering, adaptive threshold-
ing, and morphological operations. The probes and nanowires are distinguished by comparing
areas surrounded by the contours, since nanowires have smaller areas. The four probes are dis-
tinguished from each other by comparing the positions of thecentroids of their contours, and
the positions of their tips are determined as either the highest or lowest point of a probe’s con-
tour. The target positions on the nanowire for probing are determined relative to the positions
of the rightmost and leftmost points of the nanowire’s contour, according to desired separations
between the probe tips during measurements.

Chapter 3. Automated Four-Point ProbeMeasurement of Nanowires in SEM 34
3.2.3 Feature Tracking
Visual tracking provides motion/position information of the probes in the image frame as posi-
tion feedback for vision-based contact detection and visual servo control. The sum-of-squared-
differences (SSD) algorithm is employed to track the tip of a probe. The system first conducts
visual recognition in a frame of imageI1 to obtain the coordinate (x1, y1) of the probe tip. A
rectangular patch of the image containing the probe tip is recorded as a template. In subsequent
frames, the SSD measure is calculated for each possible displacement (∆x,∆y) within a search
window. Specifically, in thekth frame,
SSD(∆x,∆y) =∑
i, j∈N
[Ik(xk−1 + ∆x + i, yk−1 + ∆y + j) − Ik−1(xk−1 + i, yk−1 + j)]2 , (3.1)
where (xk−1, yk−1) is the coordinate of the probe tip in the (k − 1)th frame of imageIk−1. The
displacement (∆x,∆y) producing the minimum SSD value is considered to be the displacement
of the probe. The system simultaneously tracks all the four probes using the SSD algorithm.
To achieve a subpixel tracking resolution, eight neighboring pixels as well as the select-
ed pixel are used to fit a curved surface in terms of their SSD values. The pixel coordinate
corresponding to the valley of the curved surface is used to determine the displacement of the
feature [94].
3.2.4 Vision-Based Contact Detection
Manipulation of a nanoobject lying on a substrate requires knowledge on relative vertical po-
sitions between the end-effector and the object/substrate. When a probe is moved downwards,
the system detects the contact between the probe tip and the substrate via a vision-based con-
tact detection method, which was extended from a previous method we developed for optical
microscopy [63]. This method makes use of the phenomenon that a downward-moving probe
slides on the surface of the substrate after contact is established, as illustrated in Figure 3.3.
Inside an SEM, when a nanomanipulator moves a probe along itsz axis to approach a
substrate, the position of the probe in the image frame also moves along a certain direction, due

Chapter 3. Automated Four-Point ProbeMeasurement of Nanowires in SEM 35
substrate
X
Z
probe(upon contact)
probe(sliding)
Figure 3.3: Principle of vision-based contact detection: probe slides on the substrate after
contact establishment.
to the perspective projection model of the SEM [78]. When theprobe contacts the substrate
and begins to slide, an abrupt shift in the moving direction of the probe in the image frame is
recognized as the contact point. Therefore, by monitoring the occurrence of this phenomenon,
visually tracking a downward-moving probe is capable of detecting the contact between the
probe and the substrate.
3.2.5 Look-then-Move Control and Visual Servo Control
To achieve closed-loop positioning of a nanomanipulator intheXY plane, visual tracking of the
end-effector is used to provide position feedback for a visual servocontroller. Visual feedback
from SEM has a low sampling frequency (typically<15 frames per second (fps)). This issue
was previously addressed by selectively scanning a smallerregion of interest [77, 78]. This
approach, however, requires the installation of new hardware for accessing the scan controller
of the SEM.
To quicken the system response, this thesis uses open-loop control [Figure 3.4(a)] to quickly
bring the probe to the vicinity of the target position, without the reliance on visual feedback.
Subsequently, visual servo control [Figure 3.4(b)] is usedto bring the probe precisely to the
target position. For the open-loop control, since piezo actuators have hysteresis, a mathematical
model (denoted byH) of piezo actuators is used that takes into account the effect of hysteresis.
H is a static model that relates the actuation voltage to the output displacement.

Chapter 3. Automated Four-Point ProbeMeasurement of Nanowires in SEM 36
Figure 3.4: SEM vision-based control. (a) Look-then-move control. It quickly brings the probe
to the vicinity of the target position. (b) Image-based visual servo control. It brings the probe
precisely to the target position.
To use the model, the piezo actuator is characterized first, as shown in Figure 3.5. A voltage
is incrementally applied to an actuator and then incrementally released with the corresponding
displacements in the image frame recorded by the visual tracking algorithm. Figure 3.5 shows
the characterization results of one piezo actuator at a magnification of 3000×. The applied
voltage is denoted byu, with its lowest and highest values denoted byU0 andUn. The as-
cending and descending curves are denoted by functionsPn(u) andDn(u), and are respectively
fitted with a fourth-order polynomial. If the piezo actuatoris at any point on the ascending (de-
scending) curve, and the applied voltage is monotonically increasing (decreasing), the output
displacement isPn(u) (Dn(u)).
However, if the applied voltage starts to decrease (increase) when the actuator is on the
ascending (descending) curve, the actuator will stray awayfrom that curve due to hysteresis.
In that case, a mathematical model is used to calculate the output displacement. When the
applied voltage increases from point (u1,Dn(u1)) on the descending curve [Figure 3.5], the
output displacement (dashed curve in Figure 3.5) is [95]
P1(u) = k · Pn(m · (u − Un) + Un) + Dn(U1) − k · Pn(U0) , (3.2)
wherek = (Dn(Un) − Dn(u1))/(Dn(Un) − Dn(U0)) andm = (Un − u1)/(Un − U0).
When the actuator is on the descending curve and a certain displacement is desired, the

Chapter 3. Automated Four-Point ProbeMeasurement of Nanowires in SEM 37
Figure 3.5: Characterization of a piezo actuator for look-then-move control.
corresponding applied voltage is calculated via the Newton-Raphson method to invertDn(u)
or the mathematical model (3.2), as the output of the inversemodelH−1 in Figure 3.4(a). A
similar mathematical model is used for the scenario where the applied voltage starts to decrease
while the actuator is on the ascending curve to calculate theoutput of the inverse model.
3.2.6 Overall Process of Automated Nanomanipulation
The four probes are first brought into the field of view under a proper magnification using the
coarse positioning stages, after which only the fine positioning units are controlled to move the
probes. The probes and nanowires are visually recognized. The longest nanowire is selected
for testing, and four target positions on the nanowire are determined. The system moves the
probes downwards to establish their contact with the substrate through vision-based contact
detection. After contact detection, the probes are positioned at a certain height (e.g., 200 nm)
above the substrate, ready for subsequent in-plane movement.
The four piezoelectric tubes are actuated in their respective x andy axes to obtain param-
eters for their mathematical models to be used in the look-then-move controllers. Through
look-then-move control followed by visual servo control, the probes are simultaneously moved
toward their target positions on the nanowire [Figure 3.6].Then the probes move downwards

Chapter 3. Automated Four-Point ProbeMeasurement of Nanowires in SEM 38
Figure 3.6: Four probes simultaneously move to their targetpositions on a nanowire by vision-
based control.
to land on the nanowire for measurements. The separation distance between the inner pair of
probes can be automatically adjusted by repositioning the probes for measuring the electrical
properties of different lengths of the nanowire.
Asides from the sharp probes used in this thesis, probes withflat tips of hundreds of
nanometers in width can also be microfabricated and used forprobing nanowires. Despite
higher costs, they can provide more secure contact with nanowires. For installation, their ori-
entation should be carefully adjusted to ensure they are parallel to the substrate surface.
3.3 Experimental Results and Discussions
3.3.1 Manual Operation
For comparisons between automated nanomanipulation and manual operation, a nanomanip-
ulator was manually controlled to perform the task. An experienced operator used a joystick
and/or a program via mouse clicking to control actuation voltages for a piezoelectric tube while
monitoring the imaging screen. When approaching and contacting the substrate, the probe tip
is often bent [Figure 3.7] before the operator realizes thatthe contact has been established since
it is difficult for a human operator to promptly perceive the initial contact between the probe

Chapter 3. Automated Four-Point ProbeMeasurement of Nanowires in SEM 39
Figure 3.7: Manual operation often causes probe tip damage and sometimes inadvertently
severs a nanowire.
tip and the substrate even at high magnifications due to the drift and noise in real-time SEM
imaging.
Aside from probe damage, manually controlling a probe to probe a nanowire is also time
consuming and can be destructive to the nanowire. Bringing the probe tip to a desired location
takes much time since thex andy motions must be carefully coordinated. When the probe con-
tacts and then is lifted off the nanowire, the probe sometimes inadvertently severs thenanowire,
as shown in Figure 3.7, since the contact between the probe tip and the nanowire is difficult to
accurately determine by naked eyes observing noisy SEM imaging.
3.3.2 Evaluation of Drift and Noise in SEM Imaging
Drift and noise are inherently present in SEM imaging in the fast scanning mode, both of
which affect the performance of visual tracking. SEM image noise refers to random variations
of pixel values and arises from a few sources. Image drift refers to the movement of the entire
image, such as from electron beam drift, charge drift on a specimen, and/or electromagnetic
interferences from the environment.
In order to quantify the magnitudes of image drift and noise,the subpixel visual tracking
method was used to track stationary features on a substrate.TABLE 3.1 summarizes standard

Chapter 3. Automated Four-Point ProbeMeasurement of Nanowires in SEM 40
Table 3.1: Quantification of SEM Image Drift and Noise
magnification 30,000× 10,000× 5,000× 3,000× 1,500× 600×
(pixel size) (6.6 nm) (20 nm) (40 nm) (66 nm) (133 nm) (330 nm)
drift and noise x 4.46 2.97 2.20 1.23 0.77 0.65
(pixel) y 4.42 1.56 1.38 1.14 0.68 0.69
noise x 1.27 0.97 0.72 0.68 0.77 0.60
(pixel) y 0.96 0.76 0.49 0.40 0.41 0.49
deviations for different magnifications at the highest scanning rate of 13 fps. Besides showing
the combinatorial effect of image drift and noise, TABLE 3.1 also shows the effect of image
noise alone, which was obtained by simultaneously trackingtwo stationary features in the
image to remove the effect of image drift. It can be seen from TABLE 3.1 that at higher
magnifications, image drift and noise are more significant and are generally smaller along the
y direction than along thex direction.
Since the effect of image drift can be eliminated, image noise is the primary source of
errors in visual tracking and automated nanomanipulation,and therefore, of primary concern.
In TABLE 3.1, the image noise at the magnification of 3000× is approximately 0.68 pixel along
thex axis, which corresponds to 45 nm considering the pixel size of 66 nm/pixel. It can also be
observed from TABLE 3.1 that although a higher magnificationgenerally gives rise to higher
image noise in pixels, the noise level in terms of nanometersis actually reduced at increasing
magnifications. Thus, for manipulating nanoobjects smaller than 45 nm, a higher magnification
than 3,000× is necessary. Since the nanowires in this study have diameters ranging from 70 nm
to 100 nm, the 3,000× magnification was sufficient in terms of tracking resolution and hence,
automated probing requirements.
While image noise can be reduced by choosing slow scanning modes of the SEM, lower
frame rates are inadequate for automated nanomanipulationrelying on the SEM visual feed-

Chapter 3. Automated Four-Point ProbeMeasurement of Nanowires in SEM 41
140
145
150
coo
rdin
ate
(pix
el)
of
pro
be
tip
0 100 200 300image number
A
B
C
D
E
F
subpixel tracking
pixel tracking
Figure 3.8: Automated contact detection and subsequentZ-positioning of a probe via pixel and
subpixel visual tracking.
back for closed-loop control.
3.3.3 Contact Detection Results
Contact detection was performed in an area of the substrate where there were no nanowires or
contaminants below the probe to ensure contact detection accuracy. The system moved a probe
downwards at a constant speed. Meanwhile, the position of the probe tip in the image frame
along its moving direction was monitored using visual tracking. As an example, Figure 3.8
shows the results of automated contact detection and subsequentZ-positioning for one of the
piezoelectric tubes via both pixel and subpixel tracking methods.
Each of the two data curves in Figure 3.8 is comprised of five characteristic segments,
representing five different stages of the process. First, in segmentAB, the pixel coordinate
of the probe tip in the image frame increases, correspondingto the stage that the probe tip
approaches the substrate prior to contact. Second, in segment BC, the pixel coordinate quickly
decreases after pointB, which represents that the probe is sliding forward on the substrate
surface after contact. At pointC, contact is determined by the system to have occurred since
the pixel coordinate has decreased by five pixels, which is the preset threshold in consideration

Chapter 3. Automated Four-Point ProbeMeasurement of Nanowires in SEM 42
with look-and-move firstwithout look-and-move
Figure 3.9: Step responses of the vision-based control system for one axis of a piezo tube with
and without using look-then-move control first.
of the image noise level. Thereby at pointC the probe is stopped from descending, and the
initial contact point is determined to be pointB.
Third, in segmentCD, the pixel coordinate increases again, which corresponds to the stage
that the probe tip is sliding back as the probe is being raised. Fourth, in segmentDE, the
pixel coordinate decreases, which represents that the probe tip is ascending after having been
lifted off the substrate. Fifth, in segmentEF, the pixel coordinate remains unchanged within a
margin of 0.6 pixel, which represents that the probe is positioned at a height above the substrate.
By comparing the two curves in Figure 3.8, it can be seen that the subpixel tracking method
demonstrates a superior resolution for processing noisy SEM images.
3.3.4 Performance of Vision-Based Control System
A step signal (the desired displacement in pixels) was inputto the control system. The respons-
es of the system to a 100-pixel-step input with and without using the open-loop control first
are shown in Figure 3.9. The use of the open-loop control shortens the rise time from 3.51 s
to 0.44 s, and the settling time from 5.23 s to 0.61 s. TheXY positioning accuracy was deter-
mined to be 42 nm at 3000×magnification. The much faster response is because the open-loop

Chapter 3. Automated Four-Point ProbeMeasurement of Nanowires in SEM 43
Figure 3.10: Four probes landing on target positions for four-point probe measurement.
control incorporates the mathematical model of the piezoelectric actuator and does not rely on
any feedback. Low-frame-rate SEM visual feedback is only used after the probe tip is within
the vicinity of the target position, for fine positioning.
3.3.5 Four-Point Probe Measurement Results
A source-measure instrument (Keithley System SourceMeter2602) was connected to the four
probes through its two channels (a current source and a voltmeter). After contact detection, the
probes were positioned at approximately 200 nm above the substrate, with their corresponding
xy coordinate changes (vs. thexy coordinate when a probe is in initial contact with the substrate
and when a probe is 50 nm above the substrate) in the image frame recorded.
The system then horizontally servoed the probes to their target positions on a nanowire,
taking into account the pixel coordinate changes of the probes from the height of 200 nm to
the target height of 50 nm above the substrate. A target height of 50 nm above the substrate
was chosen to ensure secured pressing on our nanowires that range from 70 nm -100 nm in
diameter. After the probes landed on the nanowire, as shown in Figure 3.10, a current sweep
was applied to the outer pair of probes (probe 1 and probe 3), and the inner pair of probes
(probe 2 and probe 4) measured the resultant voltages. To quantify the repeatability of this
technique, the entire automation process from contact detection to the finalI–V measurement

Chapter 3. Automated Four-Point ProbeMeasurement of Nanowires in SEM 44
0
2
4
6
8
mea
sure
dv
olt
age
(V)
0 1 2 3 4 5 6applied current (µA)
(a)9 µm
8 µm
6 µm
4 µm
3 µm
0
0.5
1
1.5
2
resi
stan
ce(M
Ω)
0 1 2 3 4 5 6 7 8 9 10separation between inner tips (µm)
(b)
resistance data
linear regression
Figure 3.11: Four-point probe measurement results of a nanowire. (a) I–V data of a nanowire
with regard to different separations between the two inner probes. (b) Separation-resistance
relationship.
was attempted 50 times on 5 nanowires with 100% success rate.
The I–V data from a nanowire (83 nm in width) is shown in Figure 3.11 (a). The five
data curves correspond to five different separations between the two inner probes. The five
corresponding resistance values are proportional to the separations (i.e., the portions of the
nanowires between two inner probe tips), as shown in Figure 3.11 (b). Assuming the nanowire
has a circular cross section, the resistivity was determined to be 9.88×10−4 Ω · m. When a
higher current was applied, and the nanowire finally failed when the current reached 7.4µA.

Chapter 3. Automated Four-Point ProbeMeasurement of Nanowires in SEM 45
The breakdown current density of the nanowire was calculated to be 1.36×109 A/m2.
3.4 Conclusions
This chapter demonstrated automated nanoprobing using SEMas a vision sensor. A method
for vision-based contact detection was developed to detectthe contact between a probe and a
substrate for determining relative vertical positions of the probe tip and a nanoobject to be ma-
nipulated. A visual servo control system was built for closed-loop control of multiple nanoma-
nipulators, following the open-loop control that brought the probe to the vicinity of the target
position. Four-point probe measurements were conducted onindividual tin oxide nanowires
lying on a substrate. This technique can also be useful for electrical testing of nanostructures,
such as nanodevices comprised of multiple nanoelectrodes and one-dimensional nanomaterials.

Chapter 4
Piezoresistivity Characterization of
Nanowires using a MEMS Device
4.1 Introduction
Characterization of nanomaterials is important for understanding their properties and exploring
their applications. Among a range of properties of nanomaterials, the piezoresistive effect is of
interest because of its potential utilization in electromechanical sensors and strain engineering
for nanoelectronics applications. For instance, individual single-walled carbon nanotubes were
used as active transducer elements in a pressure sensor [96]and a displacement sensor [97].
To quantify the piezoresistivity of individual nanomaterials, a number of experimental tech-
niques have been reported. The experiments in common require simultaneous mechanical load-
ing and electrical measurement of a nanomaterial. For example, the cantilever tip of AFM was
used to laterally push a single-walled carbon nanotube suspended over a trench between two
solid electrodes [98], which results in large local deformation of the nanotube at the tube-tip
contact point. To achieve more uniform tensile stretching,carbon nanotubes were suspend-
ed between a solid terrace and a suspended beam, which was pushed downwards by an AFM
cantilever [99]. This scheme also results in large local deformation of carbon nanotubes at the
46

Chapter 4. Piezoresistivity Characterization of Nanowires using aMEMS Device 47
edges of the terrace and suspended beam, which undesirably contributes to the characterization
results.
Uniaxial or almost uniaxial tensile strains were also produced. The four-point bending
method was used to deform silicon nanowires that were epitaxially grown across a trench, pro-
ducing low level uniform strains on the order of 10−4 [100]. To produce severe strains, silicon
nanowires were grown between a silicon pad and a cantilever beam, which was pushed by a
probe along the longitudinal direction of the nanowire [13]. A single-walled carbon nanotube
was adsorbed on top of a membrane and was electromechanically characterized through bulge
testing [96]. A silicon nanowire was embedded close to the anchor of a cantilever, which was
pushed down by a stylus [101]. Individual InGaAs/GaAs nanosprings were stretched by two
nanomanipulators inside a scanning electron microscope (SEM) for piezoresistivity character-
ization [102].
Besides the aforementioned methods, MEMS actuators are capable of delivering adequate
motion resolutions and ranges for deforming nanomaterials, a number of MEMS devices were
developed for mechanical characterization of nanomaterials [66–70, 103–113]. For example,
electrostatic actuators [66, 70, 105] and electrothermal actuators [105, 111] were utilized to
stretch nanomaterial specimens. MEMS capacitive sensors were incorporated into some of the
MEMS devices [67, 70] to measure tensile forces of the specimen. The elongation measure-
ments of the nanomaterial were obtained via SEM imaging.
While most of existing MEMS devices are only capable of mechanical characterization of
nanomaterials, two of them have electrical testing capabilities [107,108]. However, the device
reported in [107] can only characterize a pair of nanowires in conjunction, rather than individ-
ual nanowires, because the two electrical terminals are both on the stationary portion of the
device. The device reported in [108] contains an electrothermal actuator, which causes temper-
ature increase in the specimen and affects nanomaterial characterization results. Additionally,
force sensing mechanisms of both devices [107, 108] are coupled with actuators, which can
introduce large errors in comparison with the use of an independent force sensor.

Chapter 4. Piezoresistivity Characterization of Nanowires using aMEMS Device 48
This chapter reports on a MEMS device and experimental techniques for the electrical
and mechanical characterization of individual one-dimensional nanomaterials. Different from
previous MEMS tensile-testing devices, this device is capable of acquiring both force and e-
longation data of a nanomaterial specimen electronically without relying on SEM imaging.
In addition, since this MEMS device is capable of performingelectrical measurements on a
nanomaterial under controllable mechanical strains, the piezoresistive property of the nano-
material is able to be characterized. The effect of electron beam (e-beam) irradiation on the
characterization results is also presented. Electrical insulation on the suspended structures was
created through a microfabrication process, enabling the electrical measurement of a nanoma-
terial. Individual silicon nanowires were integrated to the MEMS device via pick-and-place
nanomanipulation inside an SEM, and characterized for their mechanical and piezoresistive
properties.
4.2 Device Design and Analysis
4.2.1 Device Design
As schematically illustrated in Figure 4.1(a)(b), the device is composed of two suspended shut-
tles, namely, the actuator shuttle (on the left) and the force sensor shuttle (on the right), with a
small gap in between to be bridged by a nanomaterial specimen. The actuator shuttle includes
an electrostatic actuator and a capacitive displacement sensor (lateral comb-drive configura-
tion) that measures displacements of the actuator. The force sensor shuttle contains a capacitive
force sensor (transverse-comb configuration), which measures tensile forces of the specimen
as well as its own displacement. When the actuator shuttle moves leftward, the specimen is
stretched and the force sensor shuttle is also pulled leftward. Thus, the amount of specimen
elongation is the displacement of the actuator subtracted by that of the force sensor.
This electronic method of elongation measurement has advantages over electron microscopy
(EM) imaging as used in previous MEMS-based nanomaterial testing devices. First, it offers a

Chapter 4. Piezoresistivity Characterization of Nanowires using aMEMS Device 49
a b
(a) gap to be bridged by a nanomaterial
electricalinsulation cuts
displacementsensor
actuator forcesensor
calibrationsensor
A +−1 mm
(b)
mechanicalconnection
Figure 4.1: Schematics of the MEMS device for electromechanical characterization. Force and
displacement data of the nanomaterial are both acquired electronically, obviating the reliance
on electron microscopy imaging. Electrical insulation within suspended structures enables
simultaneous electrical characterization during tensiletesting. (a) Planar schematic showing
device compositions. (b) 3D model of the device.
higher sampling rate than EM imaging (EM typically has a rateof 13 frames per second in fast
scanning mode). Thus, data points during rapidly developing events (e.g., plastic deformation
and failure) can possibly be captured. Second, EM imaging can be relieved from observing the
entire nanomaterial, and hence, can be used to focus on a section of the nanomaterial with a
higher magnification (e.g., forin situ study of deformation mechanisms). Third, EM imaging
affects electromechanical characterization, owing to e-beamirradiation. We experimentally
verified the e-beam irradiation effect, which will be discussed quantitatively in Section 4.4.4.
Fourth, the specimen can be characterized outside the EM vacuum chamber, making it easier

Chapter 4. Piezoresistivity Characterization of Nanowires using aMEMS Device 50
to study the effect of environmental factors, such as gas, light, or temperature, on nanomaterial
properties.
The probe [Figure 4.1] protruding out from the device frame is for the stiffness calibration
of the force sensor. An electrostatic actuator was chosen over an electrothermal actuator to
avoid unwanted temperature increase of the specimen owing to heat conduction, which can
alter material properties. The lateral-comb configurationwas used for displacement sensing,
since the displacement sensor should have a larger linear displacement sensing range than the
force sensor. Additionally, there is an open window below the suspended structures in the area
surrounding the gap in order to achieve electron transparency, so that transmission electron
microscopy can be used to observe the nanomaterial specimen, if desired.
Figure 4.1(a)(b) also show four electrical insulation cutson the actuator shuttle and the
force sensor shuttle. These cuts electrically separate structures of different electrical functions.
Meanwhile, mechanical connection is maintained by using the insulation layer material below
the device silicon layer of the SOI wafer, as shown in Figure 4.1(b). The specific functions
of these insulation cuts are as follows. First, the insulation cut between the displacement sen-
sor and the actuator ensures that capacitance sensing is decoupled from the actuation voltage.
Second, the two electrodes at the gap are respectively insulated from the actuator and the force
sensor, in order to provide independent electrical connections to the specimen for two-point
electrical measurement. During the electrical characterization, an electric current flows in se-
ries through beam ‘b’, the specimen, and beam ‘a’ [Figure 4.1(a)]. Third, the calibration probe
is insulated from the force sensor for valid calibration.
4.2.2 Mechanical Analysis
Since a nanomaterial specimen becomes part of the mechanical system of the device during
testing, the motion ranges and stiffness values of the actuator and sensors must be compati-
ble with the mechanical properties of the specimen. Figure 4.2 shows a spring diagram for

Chapter 4. Piezoresistivity Characterization of Nanowires using aMEMS Device 51
actuator specimen force sensorka ks k f
da d f
Fa
Figure 4.2: Mechanical model of the device during mechanical characterization of a specimen.
The characteristics (motion range and stiffness) of the actuator and the two sensors must be
compatible with that of the target specimen, in order to achieve desired testing conditions.
analyzing deformation compatibility and force equilibrium.
da = ds + d f (4.1a)
ksds = k f d f (4.1b)
Fa = kada + ksds (4.1c)
whereda is the displacement of the actuator shuttle,ds is the elongation of the specimen,d f
is the displacement of the force sensor shuttle,ka, ks, andk f are the stiffness values of the
actuator shuttle, the specimen, and the force sensor shuttle, respectively, andFa is the output
force generated by the actuator.
The equations were used for parameter design of the device, in consideration of the require-
ment to produce tensile failure of the specimen. The specimen elongation at the failure point
can be estimated using
dso = wgεo (4.2)
wherewg is the gap width of the device (original specimen length), and εo is the approximate
failure strain according to the reported data in literature. d f at specimen failure is set to be
the largest displacement of the force sensor in its linear sensing range. Thenks, k f can be
selected according to (4.1b). A slightly largerk f can be chosen to ensure specimen failure.
Subsequently, (4.1a) is used to selectda at specimen failure, which is the largest displacement
required for the actuator shuttle. Finally, (4.1c) is used to determine the largestFa required, for
the actuator parameter design (e.g., number of comb pairs).

Chapter 4. Piezoresistivity Characterization of Nanowires using aMEMS Device 52
contact specimen contact
beam a beam b
source–measurementunit
Figure 4.3: Circuit diagram of the testing setup during electrical characterization of a nanoma-
terial specimen. In order to extract the intrinsic electrical characteristics of a specimen, contact
resistances as well as the resistances of the two beams are considered.
4.2.3 Electrical Analysis
Within the circuit for electrical characterization, the specimen is connected in series with beam
a and beam b (these beams are labeled in Figure 4.1(a)). Additionally, contact resistances exist
between the specimen and the two electrodes [Figure 4.3]. Thus, the measured current–voltage
(I–V) characteristics are not from the specimen alone. The contact can be either an ohmic
contact or a Schottky barrier. Since an ohmic contact can also be regarded as a Schottky barrier
with a low barrier height close to zero [114], Schottky diodes are used in Figure 4.3 to represent
contacts. It can be seen that at a given voltage, one Schottkybarrier is forward-biased, whereas
the other is reverse-biased, playing an important role in the measuredI–V data. This contact
effect must be considered and is discussed in detail in Section 4.4.3.
The resistances of beam a and beam b can be well calculated, given that beam dimensions
and the resistivity of the silicon device layer are known. They can also be experimentally
verified by fabricating and testing a device with the actuator shuttle and the force sensor shuttle
connected. Additionally, if the device layer silicon is notheavily doped, the piezoresistive
effect of beam a and beam b should also be taken into account.
It should be noted that four-point probe measurement is capable of eliminating/minimizing
the contact resistance effect [90, 115, 116], and can also be realized herein by modifying the
device design. However, such modification would require a longer specimen to span four
suspended electrodes.

Chapter 4. Piezoresistivity Characterization of Nanowires using aMEMS Device 53
(a) (b)
(c) (d)
(e) (f)
(g) (h)
device layer Si
handle layer Si SiO2
photoresist
Al electrodes combs gap
Figure 4.4: Microfabrication process flow. (a) Grow thermaloxide on the backside of the
SOI wafer. (b) Pattern thermal oxide layer by RIE. (c) DRIE-etch handle layer Si. (d) RIE-
etch thermal oxide layer. (e) DRIE-etch handle layer Si. (f)BOE-etch buried oxide layer and
thermal oxide layer. (g) E-beam-evaporate Al and lift off. (h) DRIE-etch device layer Si and
release devices.
4.3 Device Fabrication and Calibration
4.3.1 Microfabrication
A deep reactive-ion etching (DRIE) on silicon-on-insulator (SOI) process, modified from [117],
was used for device construction [Figure 4.4]. The startingSOI wafer has a 25-µ-thick silicon
device layer that was heavily doped with boron (resistivity: 1.7–1.9×10−5 Ω·m). The low-
resistivity device layer reduces the resistivity of beam a and beam b [Figure 4.1(a) and Figure
4.3] as well as their piezoresistive effect.
Briefly, thermal oxidation is used to grow 1-µm-thick oxide layers on the top and bottom
surfaces of the wafer, and then the top oxide layer is stripped with buffered oxide etch (BOE)
[Figure 4.4(a)]. The bottom thermal oxide layer is then patterned using reactive-ion etching
(RIE) [Figure 4.4(b)]. A thick layer of photoresist is patterned on the bottom side, which is
used in conjunction with the thermal oxide layer as an etch mask for the DRIE of the handle

Chapter 4. Piezoresistivity Characterization of Nanowires using aMEMS Device 54
AD7746 capacitance-to-digital converter
5 mmMEMS device
Figure 4.5: MEMS device wire-bonded to a circuit board with acapacitive readout IC for
sampling capacitance data from the displacement sensor andthe force sensor.
layer to create steps of a certain height (e.g., 100µm) [Figure 4.4(c)]. The thermal oxide not
covered by the photoresist is etched using RIE [Figure 4.4(d)]. Using the remained photoresist
as an etch mask, the silicon handle layer is etched until the buried oxide layer by DRIE [Figure
4.4(e)]. The buried oxide layer as well as the remained bottom oxide layer is etched using BOE
[Figure 4.4(f)]. Aluminum electrodes are patterned on the top side by e-beam evaporation
and lift-off [Figure 4.4(g)]. Finally, the device layer is patterned using DRIE to form active
structures [Figure 4.4(h)].
For mechanically connecting suspended structures with electrical insulation, the two-step
DRIE process of the handle layer [Figure 4.4(c) and (e)] creates a step difference between
the central suspended structure and the device frame, whichsignificantly reduces the risk of
device breakage during device handling and operation. The released devices are glued and
wire-bonded to custom-made printed circuit boards [Figure4.5] with a two-channel capacitive-
to-digital converter (AD7746, Analog Devices Inc.) for sampling data from the two capacitive
sensors on the device. Since the remained flux on the circuit boards can outgas in SEM, it was
removed using an ultrasonic cleaner and an aqueous flux remover, prior to the wire-bonding.
The glue and solder used in this work are vacuum compatible.

Chapter 4. Piezoresistivity Characterization of Nanowires using aMEMS Device 55
0.0 0.5 1.0 1.5 2.00.0
0.4
0.8
1.2 measured data
linear regressionou
tput
vol
tage
(V)
displacement ( m)
(a)
0.0 0.5 1.0 1.50.0
0.2
0.4
0.6
0.8
1.0 measured data
linear regression
outp
ut v
olta
ge (V
)
displacement ( m)
(b)
0 5 10 15 20 250.0
0.2
0.4
0.6
0.8
1.0 measured data
linear regression
outp
ut v
olta
ge (V
)
applied force ( N)
(c)
Figure 4.6: Calibration results of the displacement sensor(a) and the force sensor (b)(c). The
displacement sensor exhibits a resolution of 1.7 nm at 45 Hz.The force sensor exhibits a
displacement sensing resolution of 1.5 nm and a force sensing resolution of 26.8 nN at 45 Hz.
A few devices whose actuator shuttle and force sensor shuttle are connected by design
were also included on the same wafer, for device characterization. The equivalent resistance
of beam a and beam b was measured to be 81Ω, which is negligible in comparison with the
nanowire resistances obtained in Section 4.4.3. Furthermore, the deformation of the two beams
by the actuator did not result in resistance change. Therefore, beam a and beam b can be safely
ignored in the circuit shown in Figure 4.3.

Chapter 4. Piezoresistivity Characterization of Nanowires using aMEMS Device 56
4.3.2 Sensor Calibration
The displacement sensing functions of both the displacement sensor and the force sensor were
calibrated. The force sensing function of the force sensor was also calibrated. A data sampling
rate of 45 Hz was used during device calibration.
The displacement sensor was deformed by driving the actuator [Figure 4.1(a)], with the
displacements measured from microscopy imaging and correlated to the output voltage of the
readout circuit [Figure 4.6(a)]. Determined from the noiselevel of the output voltage, the
displacement sensor exhibits a resolution of 1.7 nm at 45 Hz.The force sensor was deformed
by using a microprobe under a probe station to push the calibration probe of the device, with
the displacements also measured from both imaging and the readout circuit. The calibration
results are shown in Figure 4.6(b). The displacement sensing resolution of the force sensor was
determined to be 1.5 nm at 45 Hz.
A precision microbalance (XS105DU, Mettler-Toledo Inc.) with a resolution of 0.1µN was
used to calibrate the force sensor. Figure 4.6(c) shows the calibration results. The force sensor
exhibits a resolution of 26.8 nN at 45 Hz. Additionally, the stiffness of the force sensor can be
obtained by calculating the ratio of the slope of the regression line in Figure 4.6(b) to that in
Figure 4.6(c), resulting in 18.2 N/m.
4.4 Experimental Results and Discussions
4.4.1 Synthesis of Silicon Nanowires
As a type of piezoresistive nanomaterial, silicon nanowires were chosen for characterization by
the MEMS device in this work. Silicon nanowires used in this study were vapor-liquid-solid
(VLS) synthesized using low pressure chemical vapor deposition (LPCVD). A gold thin film
was thermally evaporated onto a silicon (111) substrate, which was subsequently annealed to
form a discontinuous film consisting of 50–100 nm diameter gold islands. The substrate was

Chapter 4. Piezoresistivity Characterization of Nanowires using aMEMS Device 57
then introduced into a reactor and brought to a temperature above the Au-Si eutectic point of
363 °C in a H2 atmosphere. Deposition occurred at approximately 550 °C using a 10% SiH4/H2
as the silicon source with trace levels of phosphine (PH3) as the n-type dopant source at a total
pressure between 10 and 50 Torr. Lengths of the synthesized nanowires were 10–30µm.
4.4.2 Transfer of Nanowire onto MEMS Device
A few methods have been reported for the integration of a nanomaterial to a MEMS de-
vice. Nanomaterials can be fabricated directly on MEMS devices [103,118]). Pre-synthesized
nanomaterials were also transferred onto MEMS devices via DEP (dielectrophoresis) trap-
ping [104,119] [111], FIB (focused ion beam) deposition [106], and direct pick-and-place [67,
70, 105, 108, 120–123]. Due to the flexibility of pick-and-place nanomanipulation inside SEM
and no need for nanomaterial pre-processing (e.g., sonication), we transferred individual sili-
con nanowires from growth substrates onto MEMS devices via direct pick-and-place.
For the experimental setup, a silicon nanowire substrate and a circuit board with a wire-
bonded MEMS device were placed on the specimen stage of an SEM(S-4000, Hitachi Inc.),
where a nanomanipulation system (S100, Zyvex Inc.) was mounted, as illustrated in Figure
4.7(a). A tungsten probe (tip diameter: 200 nm) was installed to one of the nanomanipulators
and used to transfer individual nanowires [Figure 4.7(b1)–(b3)]. Throughout the manipulation
process, an acceleration voltage of 2 kV in SEM imaging was typically used.
Briefly, the nanomanipulator first approaches an edge of the nanowire substrate and es-
tablishes contact with a single nanowire near its root. Following the contact, the nanowire
is ‘soldered’ to the probe tip using electron beam induced deposition (EBID). The deposited
material from EBID without injecting precursors is carbonaceous material, which is from the
decomposition of contaminants inside the SEM chamber [10, 11, 73]. The probe then retracts
and pulls the nanowire off from the growth substrate, as shown in Figure 4.7(b1). A detached
nanowire typically fractures near its root, so the upper section of the nanowire to be used for
testing does not experience tension and remains intact.

Chapter 4. Piezoresistivity Characterization of Nanowires using aMEMS Device 58
(a)
4
32
110 mm
(b1) (b2)
(b3) (b4)
probe
nanowire
probe
gap
EBIDfractured
Figure 4.7: Nanowire transfer. (a) Experimental setup: TheMEMS device and the nanowire
sample are installed to the specimen stage of an SEM integrated with a nanomanipulation sys-
tem. 1. Nanomanipulator, 2. tungsten nanoprobe, 3. siliconnanowire substrate, and 4. MEMS
device. (b) Transfer procedure: A silicon nanowire is transferred from its growth substrate to
the testing device via nanomanipulation inside an SEM, followed by electromechanical char-
acterization. (b1) The probe picks up a nanowire by soldering it to the probe tip using EBID
and detaching it from the growth substrate. (b2) The nanomanipulator transfers the nanowire to
above the device. (b3) The nanomanipulator places the nanowire across the gap of the device
and the nanowire is EBID-soldered to the two edges of the gap.(b4) The device electrome-
chanically interrogates the nanowire until its tensile failure.
The nanomanipulator subsequently transfers the nanowire to above the MEMS device [Fig-
ure 4.7(b2)] and lowers the nanowire to place it across the gap of the device. The first bond
between the nanowire and one edge of the gap is formed again via EBID. The nanomanipula-
tor then orients the nanowire to make it perpendicular to thegap, followed by EBID-soldering
the nanowire to the second gap edge [Figure 4.7(b3)]. The purpose of fixing the nanowire to
the very edges of the gap, rather than some distance away fromthe edges, is to prevent static
friction between the nanowire and the device surface when the nanowire is stretched.
Finally, the probe is retracted from the MEMS device, duringwhich the nanowire break-

Chapter 4. Piezoresistivity Characterization of Nanowires using aMEMS Device 59
(a)
stre
ss (
GP
a)
0 1 2 3 4 0
1
2
3
4
5
6
strain (%)
measured data
linear regression
E = 165.3 GPa
(b)
0.0% 1.3% 2.1% 2.7% 3.0%
–20 –10 0 10 20
strain level
0
–1
–2
1
2
3
4
curr
ent
(nA
)
voltage (V)
Figure 4.8: Mechanical and electrical characterization results. (a) Stress–strain curve. The
nanowire exhibits a Young’s modulus of 165.3 GPa and a failure strength of 5.67 GPa. (b)I–V
characteristics of the nanowire under different strain levels.
s between the second EBID-bond on the device and the EBID-bond on the probe. Prior to
stretching the nanowire, the two bonds are strengthened using EBID once again, until theI–V
characteristics of the nanowire does not change anymore. This step was also performed to en-
sure the EBID bonds are secure during nanowire stretching and do not break before the tensile
failure of the nanowire.
4.4.3 Nanowire Characterization
The nanowire specimen was tensile-stretched until its fracture [Figure 4.7(b4)] with the force–
elongation data recorded, during which itsI–V data curves were also obtained using a source
measurement unit (SourceMeter 2602, Keithley InstrumentsInc.) at a number of strain levels.
A representative stress–strain curve from a nanowire specimen is shown in Figure 4.8(a), from
which the Young’s modulus (165.3 GPa) and failure strength (5.67 GPa) were determined. It
can also be observed from the curve that the nanowire specimen did not experience the phase
of plastic deformation before fracture, proving to be brittle. The Young’s modulus derived
from five silicon nanowires was 165.4±3.9 GPa (n=5), which is in agreement with findings for
VLS-grown [111] silicon nanowires as reported in [70, 124].In all experiments, the nanowire

Chapter 4. Piezoresistivity Characterization of Nanowires using aMEMS Device 60
misalignment was less than 5 between the axial direction of the nanowire specimen and the
stretching direction, resulting in an error of less than 1% in the measured Young’s modulus [67].
The failure strengths of the nanowires were determined to be5.3±0.6 GPa (n=5). The tested
nanowires had diameters of 72–97 nm and lengths of 6.7–8.2µm between the two EBID bonds.
For coupled electrical characterization at each strain level, a voltage sweep (e.g., from−20
V to +20 V) was applied to a nanowire specimen and the current flow was measured. Figure
4.8(b) showsI–V characteristics of a silicon nanowire at different strain levels. It can be seen
that straining the nanowire resulted inI–V changes.
Figure 4.8(b) also shows that theI–V curves are not symmetrical with regard to the ori-
gin, indicating the existence of Schottky contacts. When the applied voltage is low (<0.5 V),
the voltage is mainly distributed on the two Schottky barriers [Figure 4.3], rather than on the
specimen. As the applied voltage increases, the specimen starts to contribute more to theI–V
characteristics. At a high voltage (>5 V), while the voltage drop across the forward-biased
Schottky barrier remains small, the voltage drop across thereverse-biased Schottky barrier
becomes saturated. Thus, the slope of the linear section of aI–V curve at high voltages ap-
proximates the conductance of the specimen [114, 125–127].When the applied voltage is
even higher (e.g.,>15V), theI–V curves become more nonlinear since the electrical transport
through the nanowire is space charge limited [13,128].
Therefore, the voltage range of 5–9 V in Figure 4.8(b) was used to determine the intrinsic
resistance of the nanowire at different strain levels. The resistance and resistivity under the
unstrained condition were determined to be 5.9× 1011 Ω and 406Ω · m. At 3.0% strain, the
resistance was determined to be 2.2× 1010 Ω, reduced by a factor of 26.8 from the resistance
at zero strain. This significant change in the resistance indicates the piezoresistive effect of the
silicon nanowire. As another measure to quantify this effect, the gauge factor (ratio of relative
resistance change to strain) of the nanowire was determinedto be 67.1 at 1.3% strain. The
characterization of the piezoresistivity of silicon nanowire was enabled by the capability of the
MEMS device for simultaneous electrical and mechanical characterization.

Chapter 4. Piezoresistivity Characterization of Nanowires using aMEMS Device 61
(a) (b)
(c) (d)
0 0
1 1
2 2
3 3
4 4
−1 −1
1 1
2 2
3 3
4 4
5 5
6 6
0 020 2040 40time (s) time (s)
curr
ent
(nA
)cu
rren
t(n
A)
curr
ent
(nA
)cu
rren
t(n
A)
−20 −200 020 20voltage (V) voltage (V)
3.0%
2.1%
0.0%
3.0%
2.1%
0.0%
30 kV
20 kV
10 kV
e-beam off
30 kV20 kV
10 kV
e-beam off
Figure 4.9: (a)(b)I–V characteristics of a nanowire under e-beam irradiation of different ac-
celeration voltages (0 kV, 10 kV, 20 kV, and 30 kV), with nanowire unstrained (a) and 2.1%
strain (b), revealing the effect of SEM imaging. (c)(d) Dynamic current response of a nanowire
subject to cyclic mechanical loading with different strain levels (0, 2.1%, and 3.0%), under
a constant applied voltage of 20 V, with e-beam off (c) and e-beam on with the acceleration
voltage of 20 kV (d).
The EBID deposits for nanowire–device contact were carbonaceous materials, since no
gas was used. If a gas injection system is available, different metals such as tungsten, gold, or
platinum can be deposited. The Schottky barrier height willbe different with a different contact
material.
4.4.4 Effect of E-Beam Irradiation
Repeated tensile tests were performed on silicon nanowires, under the conditions of e-beam on
and off. The experimental results indicate that e-beam irradiation did not affect the measured

Chapter 4. Piezoresistivity Characterization of Nanowires using aMEMS Device 62
mechanical properties. However, e-beam irradiation produces significant effect onI–V charac-
teristics of nanowires. In our study,I–V characteristics of the nanowires were quantified with
the e-beam off and on with different acceleration voltages of 10 kV, 20 kV, and 30 kV, under
0% and 2.1% strain levels [Figure 4.9(a)(b)]. It can be seen that e-beam irradiation signifi-
cantly altersI–V data, likely through charge injection from e-beam into the specimen. Thus,
for electromechanical characterization of nanowires, theelongation measurement preferably
should be performed electronically. When EM imaging must beused, the acceleration voltage
should be kept low.
Figure 4.9(c)(d) show data collected on a silicon nanowire that was subject to cyclic loading
at strain levels of 0%, 2.1%, and 3.0%. By comparing the e-beam off result (Figure 4.9(c))
with the e-beam on result (Figure 4.9(d)), the current increases due to e-beam irradiation are
107% for 0% strain, 35% for 2.1% strain, and 56% for 3.0% strain, again demonstrating the
significant effect of e-beam irradiation. Additionally, cyclic loading was repeated for over
1,000 cycles. No signs of nanowire fatigue were observed.
Of the over 1,000 cycles, the above e-beam on and e-beam off experiments (Figure 9(c)(d))
demonstrated highly repeatable results, indicating that short-term e-beam irradiation affect-
s electrical measurements but does not permanently change the electrical properties of the
nanowires.
4.5 Conclusions
This chapter described a MEMS device for simultaneous electrical and mechanical charac-
terization of individual nanowires. The device integratesan actuator, two capacitive sensors,
and two suspended electrodes for a nanowire to bridge. Tensile forces and elongation mea-
surements are all acquired electronically, without relying on EM imaging. The two suspended
electrodes enableI–V characteristics of a specimen to be obtained at different strain levels.
Nanomanipulation (pick-and-place) inside SEM was performed to transfer individual silicon

Chapter 4. Piezoresistivity Characterization of Nanowires using aMEMS Device 63
nanowires from their growth substrates onto the MEMS device. Measurements were made
to quantify the mechanical and electrical properties, and piezoresistive effect of the silicon
nanowires. The significant effect that e-beam irradiation has through EM imaging on theI–V
characteristics of nanowires was also revealed.

Chapter 5
A load-lock-compatible nanomanipulation
system for SEM
5.1 Introduction
The capability of real-time imaging with nanometer resolutions makes scanning electron mi-
croscopes (SEM) an appealing imaging platform for robotic manipulation of nanometer-sized
objects. Nanomanipulation in SEM has been used to manipulate carbon nanotubes [10,73,129],
InGaAs/GaAs nanosprings [12,102], and silicon nanowires [13,65,130] for characterizing their
mechanical and/or electrical properties. Nanoassembly in SEM was also demonstrated for the
construction of three-dimensional photonic crystals [71].
A number of nanomanipulation systems have been developed bycompanies, such as K-
leindiek, Zyvex, SmarAct, and Attocube [Figure 5.1], as well as by academic laboratories
(e.g., [10, 77, 131, 132]). Piezo motors and actuators are used due to their high positioning
resolution, fast response, high force generation, and no magnetic field generation (thus, no
interference with EM imaging).
When a piezoelectric element is operated in the stick-slip mode for achieving a large motion
range (e.g., millimeters), it is often called a piezo motor.The same piezoelectric element can
64

Chapter 5. A load-lock-compatible nanomanipulation system for SEM 65
(a) (b)
(c) (d)
Figure 5.1: Commercial nanomanipulation systems. (a) Zyvex S100; (b) Kleindiek NanoWork-
station; (c) SmarAct system; (d) Attocube system.
also be operated in the fine mode (called a piezo actuator) to produce fine motion of nanometers
with a travel range limited to a few micrometers. Using a single piezo element for both coarse
and fine positioning is advantageous when a compact system size is desired. On the other hand,
when employing two piezoelectric elements, one functioning as a piezo motor and the other
independently as a piezo actuator, a nanomanipulation system is capable of extending the travel
range of fine positioning from a few micrometers to tens of micrometers.
For installing a nanomanipulation system into an SEM, nanomanipulators are mounted
onto, in most cases, the SEM stage [132, 133], or less commonly, the chamber wall [70] or
the ceiling [134] of the SEM. SEM imaging and nanomanipulation occur in the high-vacuum
chamber. The installation of a nanomanipulation system or exchanging end-effectors (e.g.,
nano probes and grippers) requires the opening of the high-vacuum chamber. Breaking the
high vacuum and exposing the chamber to the ambient environment contaminate the chamber
and incur a lengthy pump-down process (e.g., 30 minutes to 2 hours) after closing the chamber.
Besides the high-vacuum chamber, an SEM has a specimen exchange chamber (load-lock,

Chapter 5. A load-lock-compatible nanomanipulation system for SEM 66
typically much smaller than the high-vacuum chamber) through which a specimen is trans-
ferred into and out of the high-vacuum chamber. The specimentransfer process does not
significantly alter the high vacuum in the SEM main chamber; thus, no lengthy pumping is
required, and less contamination is incurred in comparisonto the opening of the high-vacuum
chamber. Therefore, it is desirable to develop a compact nanomanipulation system that can be
transferred through the specimen exchange chamber withoutbreaking the high vacuum. This
advance would make nanomanipulation systems more SEM-compatible and improve produc-
tivity especially for nanomanipulation tasks that requirefrequent exchange of end-effectors.
SEM nanomanipulation has been largely performed manually by an operator using a joy-
stick and/or a keypad while closely monitoring SEM images, which is time consuming and
skill dependent, and results in low productivity and frequent end-effector breakage. Using
SEM as a vision sensor, advances were recently made [77,78,115,135,136] to facilitate auto-
mated nanopositioning. However, piezo motor or actuator has inherent hysteresis demanding
a high-bandwidth sensor for hysteresis modeling in feedforward control [137] or closed-loop
control [138, 139], but SEM imaging suffers from low frame rates, image drift and noise, and
image quality variations due to environmental factors and electrical charging of specimens,
necessitating the use of additional position feedback, such as high-resolution optical encoders.
This chapter presents a nanomanipulation system [Figure 5.2] that is small in size, capable
of being transferred through the specimen exchange chamberof a standard SEM. This feature
circumvents the opening of the high-vacuum chamber of the SEM, which is necessary for ex-
isting nanomanipulation systems. The system also integrates high-resolution optical encoders
to provide position feedback along multiple axes with nanometer resolutions for closed-loop
positioning. The system design, system characterization details, and system performance are
presented.

Chapter 5. A load-lock-compatible nanomanipulation system for SEM 67
1
2
3
4
6
(a)
5
(b)
3 cm
2
5
4
Figure 5.2: Nanomanipulation system that is compact in size, capable of being transferred
through the specimen exchange chamber of a standard SEM. 1. SEM pole piece, 2. nanoma-
nipulator, 3. specimen holder, 4. nanomanipulator carrier, 5. male electrical connectors, 6.
female electrical connector.
5.2 System Design
As shown in Figure 5.2, the nanomanipulation system has a nanomanipulator carrier (4), on
which there are two nanomanipulators (2) and two corresponding male electrical connectors
(5). The female electrical connectors (6) are installed onto the SEM main chamber stage per-
manently, and mate with connectors (5) when carrier (4) is transferred through the specimen
exchange chamber like a regular specimen. Electrical wiresfrom connectors (6) are connected
to the nanomanipulator driver/controller outside the SEM through an SEM feedthrough port.
Carrier (4) has a T-shaped structure at its bottom for its mounting to the T-groove of the speci-
men stage. After the transfer of carrier (4), the specimen holder (3) is transferred to the carrier
through the specimen exchange chamber.
The installation of electrical connectors requires one-time opening of the high-vacuum
chamber while mounting and demounting of nanomanipulatorsdo not break the high vacu-
um. Nor does the exchange of end-effectors affect the high vacuum. In addition, in this design
architecture, transferring a specimen into and out of the SEM is decoupled from the nanoma-
nipulation system. Thus, during specimen exchanging, the nanomanipulation system stays

Chapter 5. A load-lock-compatible nanomanipulation system for SEM 68
Figure 5.3: Installation procedure of the nanomanipulation system. (a) Female electrical con-
nectors (1) are installed to the specimen stage (3) inside the SEM main chamber (2). (b) The
nanomanipulator carrier (6) is installed to the specimen exchange rod (5) after the specimen
exchange chamber (7) is aired and its door (4) is opened. (c) The nanomanipulator carrier is
transferred to the main chamber for mechanical mounting to the specimen stage and electri-
cal coupling to the previously installed female electricalconnectors. (d) The specimen holder
(8) with a specimen stub (9) is transferred to the manipulator carrier through the specimen
exchange chamber.
inside the SEM without being disturbed. Figure 5.3 shows theinstallation procedure of the
nanomanipulation system to a standard SEM (Hitachi SU6600). For demounting the specimen
holder or the nanomanipulator carrier, the specimen exchange rod is used again to transfer them
out through the specimen exchange chamber.
The system contains two nanomanipulators, both assembled from three nanopositioners
(SmarAct GmbH) integrated with optical encoders (reportedresolution: 1 nm, Numerik Jena
GmbH). The size of each nanomanipulator is 36×21×22 mm3. The nanopositioners, as esti-
mated by the manufacturer, when operating in the coarse positioning mode (i.e., as a piezo
motor), have a travel range of 10 mm and a resolution of∼50 nm; and when operating in the

Chapter 5. A load-lock-compatible nanomanipulation system for SEM 69
fine positioning mode (i.e., as a piezo actuator), have a travel range of 1µm and a resolution of
∼1 nm. The load carrying capability of the nanopositioner is approximately 3.0 N.
The system can be redesigned to contain more than two nanomanipulators. Additionally, it
is also feasible to integrate nanomanipulators with both translational and rotational degrees of
freedom into the system for more dexterous nanomanipulation. The present nanomanipulation
system producing only translational motions was systematically characterized to quantify its
performance inside SEM.
5.3 System Characterization
5.3.1 SEM Imaging
SEM imaging is used as a benchmark to characterize the performance of the actuators and
encoders of the nanomanipulation system. SEM is known to have issues such as image drift
and noise, making stationary features on a specimen appear moving in the image frame. Thus,
characterization of drift and noise in SEM imaging was conducted.
SEM image noise refers to random variations of pixel values,arising from a few sources
(e.g., limited number of excited secondary electrons from specimens). Image drift refers to the
movement of the entire image due to electron beam drift, charge drift on a specimen, and/or
electromagnetic interferences from the environment. In order to quantify image drift and noise,
two features on a stationary specimen were visually trackedsimultaneously over 5 min using a
subpixel visual tracking algorithm [94]. A high imaging magnification of 100,000× was used
along with other optimal imaging conditions (e.g., a short working distance of 5 mm, a high
acceleration voltage of 30 kV, and the use of a magnetic field cancelation device). The pixel
size at 100,000× magnification is 2 nm× 2 nm. These imaging conditions were also used in
the subsequent characterization of the nanomanipulation system.
The two tracking curves in Figure 5.4 each represent the position change of a feature rela-
tive to its original position at 0 s in the image. Those two tracked features were 1µm apart. The

Chapter 5. A load-lock-compatible nanomanipulation system for SEM 70
0 50 100 150 200 250 300−10
0
10
20
30
40
50
60
70
time (s)
drift
(nm
)
tracking curves of features 1 and 2 (overlapping)
image noise
Figure 5.4: Quantification of SEM image drift and noise. Drift curves (top) were collected by
visually tracking two stationary features on the specimen.The noise curve (bottom) results
from substraction of the two drift curves.
two curves essentially overlap, indicating that image drift dominates noise. The relative posi-
tion change between the two features (subtraction between the two tracking curves) represents
image noise, shown as the horizontal curve in Figure 5.4 (mean: 0.05 nm; standard deviation:
0.33 nm).
5.3.2 Actuator Characterization
The step size of the piezo motor (stick-slip mode) in coarse movement depends on the ampli-
tude and frequency of the driving sawtooth signal. The minimum step size is defined as the
minimum repeatable movement of the actuator in the coarse mode. As shown in Figure 5.5(a),
the minimum step size of the nanomanipulators is 97.2 nm witha standard deviation of 1.1
nm when the amplitude and frequency of the driving sawtooth signal are set to be 48.84 V and
12,000 Hz, respectively.
The input voltage of the piezo actuator ranges from 0 V to 100 Vusing a 12-bit DAC
(digital-to-analog converter), corresponding to 10 nm/V. The piezo actuator often starts at its
center position, e.g., 50 V actuation voltage, in a coarse-fine positioning system for the pur-

Chapter 5. A load-lock-compatible nanomanipulation system for SEM 71
1080 1080.1 1080.2 1080.3 1080.4 1080.50
100
200
300
400
500
600
time (s)
disp
lace
men
t (nm
)
(a)
97 nm
0 0.2 0.4 0.6 0.8 10
2
4
6
8
10
12
voltage increment (V)
disp
lace
men
t (nm
)
raw data
linear regression
(b)
0.63 nm
0 5 10 15 200
50
100
150
200
250
300
350
400
voltage increment (V)
disp
lace
men
t (nm
)
(c)
initial input voltage: 50 V
initial input voltage: 0 V
Figure 5.5: Actuator characterization results. (a) The step size of the stick-slip movement was
experimentally determined. The minimum step size that the system is capable of producing
with a high repeatability is determined to be 97.2 nm with a standard deviation of 1.1 nm.
(b) The resolution of the actuator is characterized to be better than 0.70 nm. (c) Hysteretic
behaviors of the piezo actuator when the initial input voltages are 0 V and 50 V, respectively.
pose of producing forward/backward movement. The piezo actuator was driven by an input
voltage increasing from 50 V to 51 V with an interval of 0.024 V(i.e., 100/212 V). The same
imaging conditions and subpixel visual tracking algorithmas used in the SEM characterization
were applied. As shown in Figure 5.5(b), the subpixel visualtracking algorithm detects the
movement of the piezo actuator after each two voltage increments, since one voltage increment
results in the calculated movement of 0.24 nm, smaller than the SEM imaging noise level (i.e.,
0.33 nm). The mean and standard deviation of the position increments are 0.51 nm and 0.19
nm, respectively, indicating that piezo actuator has a resolution better than 0.70 nm.

Chapter 5. A load-lock-compatible nanomanipulation system for SEM 72
0 100 200 300 400 500 600600
−800
−600
−400
−200
0
time (s)en
code
r re
adin
g (n
m)
threeencoders
encoder drift
(a)
100 100.5 101 101.5 102 102.5 103−1.5
−1
−0.5
0
0.5
1
1.5
time (s)
nois
e (n
m)
(b)p−p: 2 nm
0 0.2 0.4 0.6 0.8 1−1
0
1
2
3
4
5
time (s)
disp
lace
men
t (nm
)encoder reading
subpixel tracking
(c)
Figure 5.6: Encoder characterization results. (a) Drift quantification. (b) Noise quantification.
(c) Resolution quantification.
As the actuation voltage increases by 20 V and returns to the initial voltage, the piezo
actuator exhibits significant hysteretic behavior [Figure5.5(c)], translating into poor linearity
between the displacement and the actuation voltage. For portions of the curve where a voltage
increment corresponds to a travel distance larger than the image noise level, one voltage incre-
ment can also result in a movement detectable by the trackingalgorithm. Figure 5.5(c) also
indicates that hysteresis is highly dependent on the starting voltage, necessitating closed-loop
control [138–140] or a suitable mathematical model of the hysteretic behavior [95, 141–143]
to compensate for the nonlinearity.

Chapter 5. A load-lock-compatible nanomanipulation system for SEM 73
5.3.3 Encoder Characterization
Drift, accuracy, and resolution of the optical encoders were characterized inside the SEM. The
encoder reading drifts because the light source of the encoder generates heat and causes the
optical scale of encoder to expand. This issue is worsened bypoor heat transfer in the high
vacuum environment of SEM. Figure 5.6(a) shows encoder reading sampled at 100 Hz for 10
min while the nanomanipulators were kept unactuated. It is not clear why the encoders drift
in one direction for the first few seconds when they are turnedon and subsequently drift in the
opposite direction. After the direction reverse, all encoders drift at a near constant rate of 1.2
nm/s. This result is useful for encoder drift compensation whenrequired. It also guides one to
limit the duration between two critical encoder readings tobelow 1 s, in order to avoid/mitigate
the effect of encoder drift.
Encoder accuracy was quantified using SEM imaging. The nanomanipulators were moved
in the XY plane in open loop, with the travel distance measured from both the encoders and
SEM imaging. The absolute accuracy of the encoders depends on travel distances. For ex-
ample, when the nanomanipulator traveled by 1,292 nm (measured by SEM imaging), the
corresponding encoder reading was 1,280 nm. The encoder error changes proportionally with
traveled distances. The results show that the average accuracy of the encoders is 98% of SEM
measurements.
Subtracting the drift (e.g., a ramp signal of 1.2 nm/s) from the encoder reading in Figure
5.6(a) yields the noise component of the reading, as shown inFig. 5.6(b). The noise has a p-p
value of 2 nm, limited by the resolution of the encoder. To quantify the minimum motion an
encoder (i.e., encoder resolution) is able to detect, a piezo actuator (fine mode) was actuated to
travel by approximately 5 nm during 1 s with an interval of 1 nm. The subpixel visual tracking
result from SEM imaging is deemed to be the actual displacement, and the encoder reading is
the measured output. As shown in Figure 5.6(c) and TABLE 5.1,the difference between the
actual position and the encoder reading is less than 2 nm, demonstrating that the encoder has a
2 nm resolution.

Chapter 5. A load-lock-compatible nanomanipulation system for SEM 74
Table 5.1: Resolution of the Optical Encoders
subpixel (nm) 0 1.01 2.39 3.17 4.0 4.78
encoder (averaged) (nm) 0 0 2 2 4 4
(subpixel− encoder) (nm) 0 1.01 0.39 1.17 0 0.78
It should be noted that when an actuator was actuated to travel a small distance close to the
resolution of its encoder, the encoder resolution is the major factor determining the accuracy
the encoder reading. When the traveled distance is much larger than the encoder resolution,
the effect of the encoder accuracy alone dominates the effect of the encoder resolution.
5.3.4 Control
The integration of encoders enables the implementation of look-then-move control in theXY
directions. Considering the large travel range of the piezomotor in the coarse mode and the
small travel range of the piezo actuator in the fine mode, two classical discrete PID controllers
were implemented to control the coarse-fine system. A switchfunction was used to determine
the selection of the two PID controllers.
However, the accuracy of the optical encoders (e.g., 98% over the travel range) degrades
the accuracy of position control in the image frame, demanding an image-based visual servo
integrated with the look-then-move control. The combined use of look-then-move and image-
based visual servo improves the accuracy while maintaininga reasonable speed.
Denoting fd ∈ ℜ2×1, fi ∈ ℜ
2×1 and fc ∈ ℜ2×1as the desired, initial and current position
of the end-effector in the image frame, andXi ∈ ℜ2×1 as the initial position along theXY
directions in the actuator coordinate system, the desired positionXd ∈ ℜ2×1 of the end-effector
in the actuator coordinate system is
Xd = J( fd − fi) + Xi , (5.1)

Chapter 5. A load-lock-compatible nanomanipulation system for SEM 75
where J ∈ ℜ+ is the ratio between the displacements in the image frame andthe actuator
coordinate system by assuming thatX andY axes of the actuator coordinate system coincide
with column and row of the image frame, respectively. The assumption is feasible because the
electron beam and the SEM sample stage can be rotated to alginthe X andY axes with the
column and row of the image frame.
Coarse-Fine Switch of Look-then-Move Control
The control input (e.g.,Ux along theX direction) is switched from coarse modeUc to fine mode
U f by comparing the error (Ex) with the travel range (Θ) of the piezo actuator as follows:
Ux =
Uc, Ex > Θ
U f , Ex ≤ Θ
(5.2)
whereUc andU f are control output from classical discrete PID controllers:
Uc = KpcEx(n) + Kic
n∑
k=0
Ex(k) + Kdc∆(n) , (5.3)
U f = Kp f Ex(m) + Ki f
m∑
k=0
Ex(k) + Kd f∆(m) , (5.4)
wheren (m) is the discrete step at timet, Kpc, Kic, Kdc andKp f , Ki f , Kd f are the PID parame-
ters for the coarse and fine control, respectively.Ex(n) (Ex(m)) is the error between the current
position and desired position, and∆(n) (∆(m)) is the difference between the current position
and previous position at timen − 1 (m − 1).
Coarse-Fine Switch of Image-Based Visual Servo
The form of the controller of coarse-fine image-based visualservo is similar as (5.3) and (5.4),
except that the error is determined in the image frame. The switch of the coarse-fine control
input (ux) is as follows:
ux =
uc, ex > Ω
u f , ex ≤ Ω
, (5.5)

Chapter 5. A load-lock-compatible nanomanipulation system for SEM 76
whereuc andu f are the coarse and fine control input, andΩ (pixel) is often chosen as the ratio
between the travel range of the piezo actuator and the pixel size of the SEM image.
Switch of Look-then-Move Control and Image-Based Visual Servo
The image-based visual servo won’t be triggered until the look-then-move control reaches its
steady state, e.g.Ex = τ nm (absolute accuracy of the optical encoder correspondingto a travel
distance) by choosing the PID parameters inUc andU f carefully. For example, the control
inputu in theX direction is:
u =
Ux, |Ex| > τ
ux, Ex ≤ τ
, (5.6)
Positioning along theZ Direction
The Z position of a nanomanipulator can also be obtained through SEM imaging, by tilting
the SEM stage to achieve views from a different angle. The tilting angle can be determined
from the rotary encoder of the SEM specimen stage. The stage tilting induces relative position
change between the end-effector and the substrate in the image frame. With the tilting angle
and position change being known, the height of the end-effector relative to the substrate surface
can be calculated. However, this method depends on the availability of high-resolution rotary
encoders and is time costly in implementation. Thus, an SEM vision-based contact detection
method is developed forZ-position determination.
Accurately detecting the contact between an end-effector and the substrate can provide a
nanomanipulation system with a reference along theZ direction. Vision-based contact detec-
tion [63] is used. This approach does not require additionalequipment, devices or sensors.
Using SEM visual feedback, the end-effector (i.e., nanoprobe) is visually tracked in real-time
as it descends towards the target surface. Once contact between the end-effector and target sur-
face is established, further motion of the end-effector in theZ direction causes the end-effector

Chapter 5. A load-lock-compatible nanomanipulation system for SEM 77
0 50 100 150 200 250 30078
80
82
84
86
88
90
92
94
image frame
x co
ordi
nate
(pi
xel)
of p
robe
tip
s
B
sA
sCs
D(xB − xA) > ∆d
Figure 5.7: The end-effector slides on the substrate after contact is established.A contact is
detected if the pixel values difference in currentxi (e.g., B) and previous positionxi−5 (e.g., A)
is greater than a threshold∆d (e.g., 4 pixel).
to slide on the substrate surface. This sliding motion is detected by comparing the pixel values
difference (e.g.,xi − xi−5) and a threshold∆d (e.g., 4 pixel) as shown in Figure 5.7.
Upon the detection of the contact (e.g., point B in Figure 5.7), the end-effector is retracted to
the actual contact point (point C) by ascending in theZ direction by∆Z, and then raised by tens
of nanometers (∆Za) (to point D). As summarized in TABLE 5.2, encoder accuracy is within
98% of travel distance. Since the motion range along the∆Z is typically not beyond 100 nm
after contact detection, the nanomanipulation system usesonly encoder feedback and standard
PID position control for positioning along theZ direction after the first contact detection.
5.4 Results and Discussions
TABLE 5.2 summarizes system specifications and characterized performance. The size of the
overall system makes it easily fit through the SEM specimen exchange chamber to enter the
high vacuum chamber. The coarse positioning resolution of 97.2 nm is sufficient for the system
to manipulate submicrometer-sized objects. However, in order to manipulate nanometer-sized

Chapter 5. A load-lock-compatible nanomanipulation system for SEM 78
Table 5.2: Summary of System Performance.
dimensioncomplete system 100×80×46 mm3
manipulator 36×21×22 mm3
encoder
resolution 2 nm
accuracy 98% of travel distance
drift 1.2 nm/s
piezo motorrange 11 mm
step size 97.2 nm
piezo actuatorrange 1.2µm
resolution 0.7 nm
closed loop
accuracy98% of travel distance
(look-then-move)
accuracy< 1 pixel
(visual servo)
objects, the system must operate in the fine mode to produce a motion resolution of nanometers.
While the steady state error of the closed-loop controlled nanomanipulation system is de-
termined by the resolution of the encoders, the positioningaccuracy depends on the accuracy
of the encoders. For example, when the system is controlled to travel 320 nm along theX or Y
direction, the system reaches the target position with an error of±4 nm, benchmarked by SEM
imaging. The average encoder accuracy and actuator performance listed in TABLE 5.2 are also
applicable to theZ direction. Characterizing the system’s positioning performance along the
Z direction was performed by accurately tilting the SEM stageand using SEM imaging from
multiple oblique views.
The integrated encoders increase system bandwidth. A comparison was made between
look-then-move control and image-based visual servo. The encoder sampling frequency was

Chapter 5. A load-lock-compatible nanomanipulation system for SEM 79
0 1 2 3 4 50
0.5
1
1.5
2
2.5
3x 10
5
time (s)
resp
onse
(nm
)
look−then−move
visual servo
(a)
−20 −10 0 10 20 30 40−20
−10
0
10
20
x (µm)
y (µ
m)
initialposition
plannedtrajectory
actualtrajectory
(b)
Figure 5.8: Control system performance. (a) Step response of the system. Comparison of look-
then-move control and image-based visual servo. (b) Tracking a circle using look-then-move
control.
set to 100 Hz. SEM imaging at the fast scan mode is 30 Hz as maximum. The control gains
were tuned through trial and error. To travel a distance of 250 µm, look-then-move control
costs 0.25 s to reach the steady state while visual servo takes 3 s, as shown in Figure 5.8(a).
Figure 5.8(b) shows the tracking of a circle (diameter: 32µm) with the look-then-move
control approach. Tracking the full circle took the system 0.87 s and 10.33 s using look-then-
move and image-based visual servo, respectively. Due to encoder inaccuracies (98% of travel
distance), the largest error generated by the system was approximately 640 nm. It is also
observed that the tracking errors were larger for target positions farther away from the original
position, since the absolute encoder error is proportionalto the travel distance.
In order to leverage the high speed of look-then-move approach while reducing its errors, a
combined use of look-then-move and image-based visual servo was implemented. After look-
then-move control reaches the steady state, image-based visual servo can be used to fine tune
the final positions, making the tracking accuracy less than 1pixel with a trade off of a longer
tracking time (2.58 s vs. 0.87 s).
A range of end-effectors such as nano probes, AFM cantilevers, and micro-nanogrippers

Chapter 5. A load-lock-compatible nanomanipulation system for SEM 80
(a)
0 1 2 3 4 50
0.5
1
1.5
2
2.5
3
3.5
applied voltage (V)
mea
sure
d cu
rren
t (µA
)
measurement data
linear regression
(b)
Figure 5.9: Nanowire probing. (a) Two nano probes landing ona nanowire (90 nm in diameter)
for electrical characterization. (b)I–V characteristics of the probed nanowire.
can be mounted on the nanomanipulation system to perform tasks such as nanomaterial char-
acterization and pick-place assembly. In this chapter, nanowire probing (tin oxide nanowires)
is used as an example application to demonstrate the operation of the system.
Both nanomanipulators were mounted with a tungsten nano probe. Electrical connection
between the nano probes and outside SEM was established through electrical connectors on
the nanomanipulators and the SEM feedthrough port. The probes were chemically treated to
remove the native oxide layer using KOH and HF solutions, having an end tip of approximately
150 nm in diameter.
The system is capable of detecting the contact position by monitoring the slope change
in the image pattern. Contact detection typically costs 10 s. The system positions the nano
probes using look-then-move control along theXY direction and position control along theZ
direction. Figure 5.9(a) shows the probing of a 90 nm wide Sn nanowire. Exact accuracy of
contact detection has not been fully characterized; however, the fact that the nano probes were
able to repeatedly land on the 90 nm nanowire confirms that thecontact detection accuracy is
better than 90 nm. The average positioning time for probing ananowire is 0.25 s alongXY
directions. A SourceMeter (2602, Keithley Instruments Inc.) was used to supply voltages and
measure currents. The resistivity of the nanowire was determined from theI–V data shown in

Chapter 5. A load-lock-compatible nanomanipulation system for SEM 81
Figure 5.9(b) to be 1.10×10−3 Ω ·m.
5.5 Conclusions
This chapter presented a compact, closed-loop controlled nanomanipulation system. The sys-
tem eases end-effector exchange without requiring the opening of the high vacuum chamber
of an SEM, eliminating lengthy pumping processes and incursless contamination. The system
was systematically characterized, demonstrating the suitability for nanopositioning. The inte-
grated high-resolution encoders increase system bandwidth. When encoder feedback and SEM
visual feedback are combined, the control system is capableof achieving both a high speed and
a high accuracy.

Chapter 6
Conclusions
This thesis developed MEMS devices and robotic techniques and systems for the manipulation
and characterization of micro and nanomaterials. MEMS actuators and sensors permit the
interaction with micro and nanomaterials in a precise and well-controlled manner. Computer
vision and automatic control techniques enable the automation of manipulation processes that
are skill dependent and time consuming.
A MEMS microgripper was developed that is capable of releasing microspheres with 100%
success rate and an accuracy of 0.45±0.24µm. A MEMS testing device was developed and
used to characterize the mechanical and piezoresistive properties of silicon nanowires com-
pletely electronically without relying on SEM imaging. Theeffect of e-beam irradiation from
SEM imaging was also revealed and quantified.
Based on the microgripper, automated pick-and-place of microspheres was demonstrat-
ed using ”looking-and-moving” control. For automated four-point probe on nanowires, four
nanomanipulators in SEM were automatically controlled to land on a nanowire using visual
servo control. Vision-based contact detection was also implemented forZ position control.
A load-lock-compatible nanomanipulation system was developed to make the replacement of
end-effectors more convenient.
82

Chapter 6. Conclusions 83
6.1 Contributions
The contributions of this thesis are:
1. Design and fabrication of a MEMS microgripper that is capable of active release as well
as gripping of micro-objects.
2. Demonstration of automated pick-and-place of microspheres with 100% repeatability
and high speed.
3. Development of SEM-vision-based servo control and contact detection methods for au-
tomated nanomanipulation in SEM.
4. Demonstration of automated four-point-probe measurement of nanowires in SEM.
5. Design and fabrication of a MEMS device for the electromechanical characterization of
nanowires.
6. Revealing and quantification of the effect of e-beam irradiation on theI–V measurement
of nanowires in SEM.
7. Development and characterization of a load-lock-compatible nanomanipulation system
for SEM.
6.2 Future Directions
Many possibilities exist for extending this research. Examples are:
1. To develop a MEMS nanogripper for pick-and-place of nano-objects, such as nanowires
and nanospheres. The nanogripper has thin and narrow end tips and can be constructed
using combined micro and nanofabrication.

Chapter 6. Conclusions 84
2. To automate the pick-and-place process of nanowires by extending the developed visual
servo control and contact detection methods. Nanowire detection and selection algo-
rithms should be developed.
3. To take advantage of theex situ testing capability of the MEMS testing device to study
the effects of environmental factors, such as gas, light, or temperature, on the characteri-
zation results of nanowire specimens.
4. To modify the design of the MEMS testing device to integrate four suspended electrodes
for four-point-probe measurement of nanowires during tensile or compression tests. This
new design eliminates the effect of contact resistance on the characterization results and
also enables the study of contact effects.
5. To improve on the developed nanomanipulation system by integrating two more nanoma-
nipulators and a rotational specimen stage in the center.

Bibliography
[1] A. Blanco, E. Chomski, S. Grabtchak, M. Ibisate, S. John,S. W. Leonard, C. Lopez,
F. Meseguer, H. Miguez, J. P. Mondia, G. A. Ozin, O. Toader, and H. M. van Driel,
“Large-scale synthesis of a silicon photonic crystal with acomplete three-dimensional
bandgap near 1.5 micrometres,”Nature, vol. 405, pp. 437–440, 2000.
[2] H. Yan, H. S. Choe, S. W. Nam, Y. Hu, S. Das, J. F. Klemic, J. C. Ellenbogen, and
C. M. Lieber, “Programmable nanowire circuits for nanoprocessors,”Nature, vol. 470,
pp. 240–244, 2011.
[3] M. Law, L. E. Greene, J. C. Johnson, R. Saykally, and P. Yang, “Nanowire dye-sensitized
solar cells,”Nat. Mater., vol. 4, pp. 455–459, 2005.
[4] Y. Cui, Q. Wei, H. Park, and C. M. Lieber, “Nanowire nanosensors for highly sensitive
and selective detection of biological and chemical species,” Science, vol. 293, pp. 1289–
1292, 2001.
[5] Z. Fan, J. C. Ho, Z. A. Jacobson, R. Yerushalmi, R. L. Alley, H. Razavi, and A. Javey,
“Wafer-scale assembly of highly ordered semiconductor nanowire arrays by contact
printing,” Nano Lett., vol. 8, pp. 20–25, 2008.
[6] E. M. Freer, O. Grachev, X. Duan, S. Martin, and D. P. Stumbo, “High-yield self-limiting
single-nanowire assembly with dielectrophoresis,”Nat. Nanotechnol., vol. 5, pp. 525–
530, Jul. 2010.
85

Bibliography 86
[7] A. A. G. Requicha, D. J. Arbuckle, B. Mokaberi, and J. Yun,“Algorithms and software
for nanomanipulation with atomic force microscopes,”Int. J. Robot. Res., vol. 28, pp.
512–522, 2009.
[8] F. J. Rubio-Sierra, W. M. Heckl, and R. W. Stark, “Nanomanipulation by atomic force
microscopy,”Adv. Eng. Mater., vol. 7, pp. 193–196, 2005.
[9] S. Hsieh, S. Meltzer, C. R. C. Wang, A. A. G. Requicha, M. E.Thompson, and B. E.
Koel, “Imaging and manipulation of gold nanorods with an atomic force microscope,”
J. Phys. Chem. B, vol. 106, pp. 231–234, 2002.
[10] M.-F. Yu, O. Lourie, O. Lourie, K. Moloni, T. F. Kelly, and R. S. Ruoff, “Strength and
breaking mechanism of multiwalled carbon nanotubes under tensile load,”Science, vol.
287, pp. 637–640, 2000.
[11] T. Fukuda, F. Arai, and L. Dong, “Assembly of nanodevices with carbon nanotubes
through nanorobotic manipulations,”Proc. IEEE, vol. 91, pp. 1803–1818, 2003.
[12] D. J. Bell, L. Dong, B. J. Nelson, M. Golling, L. Zhang, and D. Grutzmacher, “Fabrica-
tion and characterization of three-dimensional InGaAs/GaAs nanosprings,”Nano Lett.,
vol. 6, pp. 725–729, 2006.
[13] A. Lugstein, M. Steinmair, A. Steiger, H. Kosina, and E.Bertagnolli, “Anomalous
piezoresistance effect in ultrastrained silicon nanowires,”Nano Lett., DOI: 10.1021/n-
l102179c.
[14] F. Garcıa-Santamarıa, H. T. Miyazaki, A. Urquıa, M.Ibisate, M. Belmonte, N. Shinya,
F. Meseguer, and C. Lopez, “Nanorobotic manipulation of microspheres for on-chip
diamond architectures,”Adv. Mater., vol. 14, no. 16, pp. 1144–1147, 2002.

Bibliography 87
[15] K. Aoki, H. T. Miyazaki, H. Hirayama, K. Inoshita, T. Baba, N. Shinya, and Y. Aoyagi,
“Three-dimensional photonic crystals for optical wavelengths assembled by microma-
nipulation,”Appl. Phys. Lett., vol. 81, no. 17, pp. 3122–3124, 2002.
[16] K. Aoki, H. T. Miyazaki, H. Hirayama, K. Inoshita, T. Baba, K. Sakoda, N. Shinya,
and Y. Aoyagi, “Microassembly of semiconductor three-dimensional photonic crystals,”
Nat. Mater., vol. 2, pp. 117–121, 2003.
[17] A. Tafazzoli, C.-M. Cheng, C. Pawashe, E. K. Sabo, L. Trofin, M. Sitti, and P. R. LeDuc,
“Subfeature patterning of organic and inorganic materialsusing robotic assembly,”J.
Mater. Res., vol. 22, no. 6, pp. 1601–1608, 2007.
[18] N. Chronis and L. P. Lee, “Electrothermally activated SU-8 microgripper for single cell
manipulation in solution,”J. Microelectromech. Syst., vol. 14, no. 4, pp. 857–863, 2005.
[19] D. H. Kim, M. G. Lee, B. Kim, and Y. Sun, “A superelastic alloy microgripper with
embedded electromagnetic actuators and piezoelectric force sensors: a numerical and
experimental study,”Smart Mater. Struct., vol. 14, pp. 1265–1272, 2005.
[20] F. Beyeler, A. Neild, S. Oberti, D. J. Bell, Y. Sun, J. Dual, and B. J. Nelson, “Monolithi-
cally fabricated microgripper with integrated force sensor for manipulating microobjects
and biological cells aligned in an ultrasonic field,”J. Microelectromech. Syst., vol. 16,
no. 1, pp. 7–15, 2007.
[21] K. Kim, X. Liu, Y. Zhang, J. Cheng, X. Y. Wu, and Y. Sun, “Elastic and viscoelas-
tic characterization of microcapsules for drug delivery using a force-feedback MEMS
microgripper,”Biomed. Microdevices, vol. 11, no. 2, pp. 421–427, 2009.
[22] C. Yamahata, D. Collard, B. Legrand, T. T. M. Kumemura, G. Hashiguchi, and H. Fu-
jita, “Silicon nanotweezers with subnanometer resolutionfor the micromanipulation of
biomolecules,”J. Microelectromech. Syst., vol. 17, no. 3, pp. 623–631, 2008.

Bibliography 88
[23] G. K. Lau, J. F. L. Goosen, F. v. Keulen, T. C. Duc, and P. M.Sarro, “Polymeric thermal
microactuator with embedded silicon skeleton: Part I—design and analysis,”J. Micro-
electromech. Syst., vol. 17, no. 4, pp. 809–822, 2008.
[24] T. C. Duc, G. K. Lau, and P. M. Sarro, “Polymeric thermal microactuator with embed-
ded silicon skeleton: Part II—fabrication, characterization, and application for 2-DOF
microgripper,”J. Microelectromech. Syst., vol. 17, no. 4, pp. 823–831, 2008.
[25] O. Sardan, V. Eichhorn, D. H. Petersen, S. Fatikow, O. Sigmund, and P. Bøggild, “Rapid
prototyping of nanotube-based devices using topology-optimized microgrippers,”Nan-
otechnol., vol. 19, 49550, 2008.
[26] Y. Choi, J. Ross, B. Wester, and M. G. Allen, “Mechanically driven microtweezers with
integrated microelectrodes,”J. Micromech. Microeng., vol. 18, 065004, 2008.
[27] T. C. Duc, G.-K. Lau, J. F. Greemer, and P. M. Sarro, “Electrothermal microgripper
with large jaw displacement and integrated force sensors,”J. Microelectromech. Syst.,
vol. 17, no. 6, pp. 1546–1555, 2008.
[28] K. N. Andersen, D. H. Petersen, K. Carlson, K. Mølhave, O. Sardan, A. Horsewell, V. E-
ichhorn, S. Fatikow, and P. Bøggild, “Multimodal electrothermal silicon microgrippers
for nanotube manipulation,”IEEE Trans. Nanotechnol., vol. 8, no. 1, pp. 76–85, 2009.
[29] H.-Y. Chan and W. J. Li, “A thermally actuated polymer micro robotic gripper for ma-
nipulation of biological cells,” inProc. IEEE/RSJ Int. Conf. Intell. Robot. Syst., Taipei,
Taiwan, Sept. 2003, pp. 288–293.
[30] J. K. Luo, J. H. He, Y. Q. Fu, A. J. Flewitt, S. M. Spearing,N. A. Fleck, and W. I. Milne,
“Fabrication and characterization of diamond-like carbon/Ni bimorph normally closed
microcages,”J. Micromech. Microeng., vol. 15, pp. 1406–1413, 2005.

Bibliography 89
[31] Y.-W. Lu and C.-J. Kim, “Microhand for biological applications,”Appl. Phys. Lett., vol.
89, 164101, 2006.
[32] J. Ok, Y.-W. Lu, and C.-J. Kim, “Pneumatically driven microcage for microbe manipu-
lation in a biological liquid environment,”J. Microelectromech. Syst., vol. 15, no. 6, pp.
1499–1505, 2006.
[33] S. Krishnan and L. Saggere, “A multi-fingered micromechanism for coordinated micro/-
nano manipulation,”J. Micromech. Microeng., vol. 17, pp. 576–585, 2007.
[34] J. S. Randhawa, T. G. Leong, N. Bassik, B. R. Benson, M. T.Jochmans, and D. H.
Gracias, “Pick-and-place using chemically actuated microgrippers,”J. Am. Chem. Soc.,
vol. 130, pp. 17 238–17 239, 2008.
[35] T. G. Leong, C. L. Randall, B. R. Benson, N. B. G. M. Stern,and D. H. Gracias, “Teth-
erless thermobiochemically actuated microgrippers,”Proc. Nat. Acad. Sci. U.S.A., vol.
106, no. 3, pp. 703–708, 2009.
[36] R. S. Fearing, “Survey of sticking effects for micro-parts,” inProc. IEEE/RSJ Int. Conf.
Intell. Robot. Syst., Pittsburgh, PA, Aug. 1995, pp. 212–217.
[37] H. T. Miyazaki, Y. Tomizawa, S. Saito, T. Sato, and N. Shinya, “Adhesion of
micrometer-size polymer particles under a scanning electron microscope,”J. Appl.
Phys., vol. 88, no. 6, pp. 3330–3340, 2000.
[38] S. Saito, H. T. Miyazaki, T. Sato, and K. Takahashi, “Kinematics of mechanical and
adhesional micromanipulation under a scanning electron microscope,”J. Appl. Phys.,
vol. 92, no. 9, pp. 5140–5149, 2002.
[39] O. Fuchiwaki, A. Ito, D. Misaki, and H. Aoyama, “Multi-axial micromanipulation or-
ganized by versatile micro robots and micro tweezers,” inProc. IEEE Int. Conf. Robot.
Autom., Pasadena, CA, May 2008, pp. 893–898.

Bibliography 90
[40] D. Heriban and M. Gauthier, “Robotic micro-assembly of microparts using a piezogrip-
per,” in Proc. IEEE/RSJ Int. Conf. Intell. Robot. Syst., Nice, France, Sept. 2008, pp.
4042–4047.
[41] W. Driesen, T. Varidel, S. Regnier, and J.-M. Breguet,“Micro manipulation by adhesion
with two collaborating mobile micro robots,”J. Micromech. Microeng., vol. 15, pp.
S259–S267, 2005.
[42] K. Takahashi, H. Kajihara, M. Urago, S. Saito, Y. Mochimaru, and T. Onzawa, “Voltage
required to detach an adhered particle by Coulomb interaction for micromanipulation,”
J. Appl. Phys., vol. 90, no. 1, pp. 432–437, 2001.
[43] S. Saito, H. Himeno, and K. Takahashi, “Electrostatic detachment of an adhering particle
from a micromanipulated probe,”J. Appl. Phys., vol. 93, no. 4, pp. 2219–2224, 2003.
[44] S. Saito, H. Himeno, K. Takahashi, and M. Urago, “Kinetic control of a particle by
voltage sequence for a nonimpact electrostatic micromanipulation,” Appl. Phys. Lett.,
vol. 83, no. 10, pp. 2076–2078, 2003.
[45] S. Saito and M. Sonoda, “Non-impact deposition for electrostatic micromanipulation
of a conductive particle by a single probe,”J. Micromech. Microeng., vol. 18, 107001,
2008.
[46] D. S. Haliyo, S. Regnier, and J.-C. Guinot, “[mu]mad,the adhesion based dynamic
micro-manipulator,”Eur. J. Mech. A, vol. 22, no. 6, pp. 903–916, 2003.
[47] D. S. Haliyo, Y. Rollot, and S. Regnier, “Manipulationof micro objects using adhesion
forces and dynamical effects,” inProc. IEEE Int. Conf. Robot. Autom., Washington, DC,
May 2002, pp. 1949–1954.

Bibliography 91
[48] Y. Fang and X. Tan, “A dynamic JKR model with applicationto vibration release in
micromanipulation,” inProc. IEEE/RSJ Int. Conf. Intell. Robot. Syst., Beijing, China,
Oct. 2006, pp. 1341–1345.
[49] W. Zesch, M. Brunner, and A. Weber, “Vacuum tool for handling microobjects with a
nanorobot,” inProc. IEEE Int. Conf. Robot. Autom., Albuquerque, NM, Apr. 1997, pp.
1761–1766.
[50] J. Liu, Y.-X. Zhou, and T.-H. Yu, “Freeze tweezer to manipulate mini/micro objects,”J.
Micromech. Microeng., vol. 14, pp. 269–276, 2004.
[51] Y. Yang, J. Liu, and Y.-X. Zhou, “A convective cooling enabled freeze tweezer for ma-
nipulating micro-scale objects,”J. Micromech. Microeng., vol. 18, 095008, 2008.
[52] B. Lopez-Walle, M. Gauthier, and N. Chaillet, “Principle of a submerged freeze gripper
for microassembly,”IEEE Trans. Robot., vol. 24, no. 4, pp. 897–902, 2008.
[53] F. Garcıa-Santamara, H. T. Miyazaki, A. Urquıa, M. Ibisate, M. Belmonte, N. Shinya,
F. Meseguer, and C. Lopez, “Nanorobotic manipulation of microspheres for on-chip
diamond architectures,”Adv. Mater., vol. 16, pp. 1144–1147, 2002.
[54] Y. Zhou and B. J. Nelson, “Adhesion force modeling and measurement for micromanip-
ulation,” in Proc. SPIE Conf. Microrobot. Micromanipulation, Boston, MA, Nov. 1998,
pp. 169–180.
[55] F. Arai, D. Ando, and T. Fukuda, “Adhesion forces reduction for micro manipulation
based on microphysics,” inProc. Int. Workshop on Micro Electro Mech. Syst., San
Diego, CA, Feb. 1996, pp. 354–359.
[56] R. A. Bowling, “A theoretical review of particle adhesion,” in Particles on Surfaces I:
Detection, Adhesion and Removal, K. L. Mittal, Ed. New York: Plenum Press, 1988,
pp. 129–155.

Bibliography 92
[57] O. H. Pakarinen, A. S. Foster, M. Paajanen, T. Kalinainen, J. Katainen, I. Makkonen,
J. Lahtinen, and R. M. Nieminen, “Towards an accurate description of the capillary force
in nanoparticle-surface interactions,”Model. Simul. Mater. Sci. Eng., vol. 13, no. 7, pp.
1175–1186, 2005.
[58] S. C. Chen and J. F. Lin, “Detailed modeling of the adhesion force between an AFM
tip and a smooth flat surface under different humidity levels,”J. Micromech. Microeng.,
vol. 18, 115006, 2008.
[59] J. N. Israelachvili,Intermolecular and Surface Forces, 2nd ed. New York: Academic
Press, 1992.
[60] A. Hariri, J. Zu, and R. B. Mrad, “Modeling of wet stiction in microelectromechanical
systems (MEMS),”J. Microelectromech. Syst., vol. 16, no. 5, pp. 1276–1285, 2007.
[61] W. Ding, A. J. Howard, M. D. M. Peri, and C. Cetinkaya, “Rolling resistance moment
of microspheres on surfaces: contact measurements,”Philos. Mag., vol. 87, no. 36, pp.
5685–5696, 2007.
[62] W. Ding, H. Zhang, and C. Cetinkaya, “Rolling resistance moment-based adhesion char-
acterization of microspheres,”J. Adhes., vol. 84, no. 12, pp. 996–1006, 2008.
[63] W. H. Wang, X. Y. Liu, and Y. Sun, “Contact detection in microrobotic manipulation,”
Int. J. Robot. Res., vol. 26, pp. 821–828, 2007.
[64] M.-F. Yu, M. J. Dyer, G. D. Skidmore, H. W. Rohrs, X. Lu, K.D. Ausman, J. R. V.
Ehr, and R. S. Ruoff, “Three-dimensional manipulation of carbon nanotubes under a
scanning electron microscope,”Nanotechnology, vol. 10, pp. 244–252, 1999.
[65] Y. Zhu, F. Xu, Q. Qin, W. Y. Fung, and W. Lu, “Mechanical properties of vapor-liquid-
solid synthesized nanowires,”Nano Lett., vol. 9, pp. 3934–3939, 2009.

Bibliography 93
[66] P. A. Williams, S. J. Papadakis, M. R. Falvo, A. M. Patel,M. Sinclair, A. Seeger,
A. Helser, and R. M. Taylor II, “Controlled placement of an individual carbon nanotube
onto a microelectromechanical structure,”Appl. Phys. Lett., vol. 80, pp. 2574–2576,
2002.
[67] Y. Zhu and H. D. Espinosa, “An electromechanical material testing system forin situ
electron microscopy and applications,”Proc. Nat. Acad. Sci., vol. 102, pp. 14 503–
14 508, 2005.
[68] B. Peng, M. Locascio, P. Zapol, S. Li, S. L. Mielke, G. C. Schatz, and H. D. Es-
pinosa, “Measurements of near-ultimate strength for multiwalled carbon nanotubes and
irradiation-induced crosslinking improvements,”Nat. Nanotechnol., vol. 3, pp. 626–631,
2008.
[69] R. Agrawal, B. Peng, and H. D. Espinosa, “Experimental-computational investigation
of ZnO nanowires strength and fracture,”Nano Lett., vol. 9, pp. 4177–4183, 2009.
[70] D. Zhang, J.-M. Breguet, R. Clavel, V. Sivakov, S. Christiansen, and J. Michler, “In
situ electron microscopy mechanical testing of silicon nanowires using electrostatically
actuated tensile stages,”J. Microelectromech. Syst., vol. 19, pp. 663–674, 2010.
[71] K. Aoki, H. T. Miyazaki, H. Hirayama, K. Inoshita, T. Baba, K. Sakoda, N. Shinya,
and Y. Aoyagi, “Microassembly of semiconductor three-dimensional photonic crystals,”
Nat. Mater., vol. 2, pp. 117–121, 2003.
[72] L. Dong, F. Arai, and T. Fukuda, “Destructive constructions of nanostructures with
carbon nanotubes through nanorobotic manipulation,”IEEE/ASME Trans. Mechatron.,
vol. 9, pp. 350–357, 2004.
[73] T. Fukuda, M. Nakajima, P. Liu, and H. ElShimy, “Nanofabrication, nanoinstrumenta-
tion and nanoassembly by nanorobotic manipulation,”Int. J. Robot. Res., vol. 28, pp.
537–547, 2009.

Bibliography 94
[74] Y. Peng, T. Cullis, and B. Inkson, “Bottom-up nanoconstruction by the welding of in-
dividual metallic nanoobjects using nanoscale solder,”Nano Lett., vol. 9, pp. 91–96,
2009.
[75] R. T. R. Kumar, S. U. Hassan, O. S. Sukas, V. Eichhorn, F. Krohs, S. Fatikow, and
P. Bøggild, “Nanobits: customizable scanning probe tips,”Nanotechnology, vol. 20, p.
395703, 2009.
[76] T. Sievers and S. Fatikow, “Real-time object tracking for the robot-based nanohandling
in a scanning electron microscope,”J. Micromechatron., vol. 3, pp. 267–284, 2006.
[77] S. Fatikow, T. Wich, H. Hulsen, T. Sievers, and M. Jahnisch, “Microrobot system for
automatic nanohandling inside a scanning electron microscope,” IEEE/ASME Trans.
Mechatron., vol. 12, pp. 244–252, 2007.
[78] B. E. Kratochvil, L. Dong, and B. J. Nelson, “Real-time rigid-body visual tracking in a
scanning electron microscope,”Int. J. Robot. Res., vol. 28, pp. 498–511, 2009.
[79] V. Eichhorn, S. Fatikow, T. Wich, C. Dahmen, T. Sievers,K. N. Andersen, K. Carlson,
and P. Bøggild, “Depth-detection methods for microgripperbased CNT manipulation in
a scanning electron microscope,”J. Micro-Nano Mech., vol. 4, p. 2736, 2008.
[80] V. Eichhorn, S. Fatikow, T. Wortmann, C. Stolle, C. Edeler, D. Jasper, O. S. P. Bøggild,
G. Boetsch, C. Canales, and R. Clavel, “Nanolab: A nanorobotic system for automated
pick-and-place handling and characterization of CNTs,” inProc. IEEE Int. Conf. Robot.
Autom., Kobe, Japan, May 2009, pp. 1826–1831.
[81] B. K. Chen, Y. Zhang, D. D. Perovic, and Y. Sun, “MEMS microgripper with thin grip-
ping tips,”J. Micromech. Microeng., vol. 21, no. 10, p. 105004, Sep. 2011.

Bibliography 95
[82] K. Kim, X. Liu, Y. Zhang, and Y. Sun, “Nanonewton force-controlled manipulation of
biological cells using a monolithic MEMS microgripper withtwo-axis force feedback,”
J. Micromech. Microeng., vol. 18, 055013, 2008.
[83] M. Jahnisch and S. Fatikow, “3-D vision feedback for nanohandling monitoring in a
scanning electronmicroscope,”Int. J. Optomechatronics, vol. 1, pp. 4–26, 2007.
[84] F. Marinello, P. Bariani, E. Savio, A. Horsewell, and L.D. Chiffre, “Critical factors in
SEM 3D stereo microscopy,”Meas. Sci. Technol., vol. 19, p. 065705, 2008.
[85] X. Lin, X. B. He, T. Z. Yang, W. Guo, D. X. Shi, H.-J. Gao, D.D. D. Ma, S. T. Lee, F. Li-
u, and X. C. Xie, “Intrinsic current-voltage properties of nanowires with four-probe s-
canning tunneling microscopy: A conductance transition ofZnO nanowire,”Appl. Phys.
Lett., vol. 89, p. 043103, 2006.
[86] A. S. Walton, C. S. Allen, K. Critchley, M. Ł. Gorzny, J.E. McKendry, R. M. D. Bryd-
son, B. J. Hickey, and S. D. Evans, “Four-probe electrical transport measurements on
individual metallic nanowires,”Nanotechnol., vol. 18, p. 065204, 2007.
[87] T.-H. Kim, X.-G. Zhang, D. M. Nicholson, B. M. Evans, N. S. Kulkarni, B. Radhakr-
ishnan, E. A. Kenik, and A.-P. Li, “Large discrete resistance jump at grain boundary in
copper nanowire,”Nano Lett., DOI: 10.1021/nl101734h.
[88] R. Lin, M. B. OHansen, R. R. Schlittler, and P. Bøggild, “Micro-four-point-probe char-
acterization of nanowires fabricated using the nanostencil technique,”Nanotechnology,
vol. 15, pp. 1363–1367, 2004.
[89] S. Dohn, K. Mølhave, and P. Bøggild, “Direct measurement of resistance of multiwalled
carbon nanotubes using micro four-point probes,”Sens. Lett., vol. 3, pp. 1–4, 2005.
[90] S. Yoshimoto, Y. Murata, K. Kubo, K. Tomita, K. Motoyoshi, T. Kimura, H. Okino,
R. Hobara, I. Matsuda, S. ichi Honda, M. Katayama, and S. Hasegawa, “Four-point

Bibliography 96
probe resistance measurements using PtIr-coated carbon nanotube tips,”Nano Lett.,
vol. 7, pp. 956–959, 2007.
[91] V. Eichhorn, S. Fatikow, O. S. Sukas, T. M. Hansen, P. Bøggild, and L. G. Occhipinti,
“Novel four-point-probe design and nanorobotic dual endeffector strategy for electrical
characterization of as-grown swcnt bundles,” inProc. IEEE Int. Conf. Robot. Autom.,
Anchorage, Alaska, May 2010, pp. 4100–4105.
[92] Y. Wang, K.-K. Lew, T.-T. Ho, L. Pan, S. W. Novak, E. C. Dickey, J. M. Redwing, and
T. S. Mayer, “Use of phosphine as an n-type dopant source for vapor-liquid-solid growth
of silicon nanowires,”Nano Lett., vol. 5, pp. 2139–2143, 2005.
[93] S. Valizadeh, M. Abid, F. Hernandez-Ramırez, A. R. Rodrıguez, K. Hjort, and J. Å.
Schweitz, “Template synthesis and forming electrical contacts to single Au nanowires
by focused ion beam techniques,”Nanotechnology, vol. 17, pp. 1134–1139, 2006.
[94] X. Liu, J. Tong, and Y. Sun, “A millimeter-sized nanomanipulator with sub-nanometer
positioning resolution and large force output,”Smart Mater. Struct., vol. 16, pp. 1742–
1750, 2007.
[95] L. Sun, C. Ru, W. Rong, L. Chen, and M. Kong, “Tracking control of piezoelectric
actuator based on a new mathematical model,”J. Micromech. Microeng., vol. 14, pp.
1439–1444, 2004.
[96] C. Stampfer, T. Helbling, D. Obergfell, B. Schoberle,M. K. Tripp, A. Jungen, S. Roth,
V. M. Bright, and C. Hierold, “Fabrication of single-walledcarbon-nanotube-based pres-
sure sensors,”Nano Lett., vol. 6, no. 2, pp. 233–237, Feb. 2006.
[97] C. Stampfer, A. Jungen, R. Linderman, D. Obergfell, S. Roth, and C. Hierold, “Nano-
electromechanical displacement sensing based on single-walled carbon nanotubes,”
Nano Lett., vol. 6, no. 7, pp. 1449–1453, Jul. 2006.

Bibliography 97
[98] T. W. Tombler, C. Zhou, L. Alexseyev, J. Kong, H. Dai, L. Liu, C. S. Jayanthi, M. Tang,
and S.-Y. Wu, “Reversible electromechanical characteristics of carbon nanotubes under
local-probe manipulation,”Nature, vol. 405, pp. 769–772, Jun. 2000.
[99] J. Cao, Q. Wang, and H. Dai, “Electromechanical properties of metallic, quasimetallic,
and semiconducting carbon nanotubes under stretching,”Phys. Rev. Lett., vol. 90, no. 15,
pp. 157 601–1–157 601–4, Apr. 2003.
[100] R. He and P. Yang, “Giant piezoresistance effect in silicon nanowires,”Nat. Nanotech-
nol., vol. 1, pp. 42–46, Oct. 2006.
[101] P. Neuzil, C. C. Wong, and J. Reboud, “Electrically controlled giant piezoresistance in
silicon nanowires,”Nano Lett., vol. 10, no. 4, pp. 1248–1252, Apr. 2010.
[102] G. Hwang, H. Hashimoto, D. J. Bell, L. Dong, B. J. Nelson, and S. Schon, “Piezoresis-
tive InGaAs/GaAs nanosprings with metal connectors,”Nano Lett., vol. 9, pp. 554–561,
2009.
[103] M. A. Haque and M. T. A. Saif, “Microscale materials testing using MEMS actuators,”
J. Microelectromech. Syst., vol. 10, no. 1, pp. 146–152, Mar. 2001.
[104] S. Lu, Z. Guo, W. Ding, D. A. Dikin, J. Lee, and R. S. Ruoff, “In situ mechanical testing
of templated carbon nanotubes,”Rev. Sci. Instrum., vol. 77, no. 12, p. 125101, Dec.
2006.
[105] H. D. Espinosa, Y. Zhu, and N. Moldovan, “Design and operation of a MEMS-based ma-
terial testing system for nanomechanical characterization,” J. Microelectromech. Syst.,
vol. 16, no. 5, pp. 1219–1231, Oct. 2007.
[106] M. Kiuchi, S. Matsui, and Y. Isono, “Mechanical characteristics of FIB deposited carbon
nanowires using electrostatic actuated nanotensile testing device,”J. Microelectromech.
Syst., vol. 16, no. 2, pp. 191–201, Apr. 2007.

Bibliography 98
[107] ——, “The piezoresistance effect of FIB-deposited carbon nanowires under severe s-
train,” J. Micromech. Microeng., vol. 18, no. 6, p. 065011, Jun. 2008.
[108] J. J. Brown, J. W. Suk, G. Singh, A. I. Baca, D. A. Dikin, R. S. Ruoff, and V. M. Bright,
“Microsystem for nanofiber electromechanical measurements,” Sens. Actuators, A, vol.
155, no. 1, pp. 1–7, Oct. 2009.
[109] D. Zhang, J.-M. Breguet, R. Clavel, L. Phillippe, I. Utke, and J. Michler, “In situ tensile
testing of individual Co nanowires inside a scanning electron microscope,”Nanotech-
nology, vol. 20, no. 36, p. 365706, Sep. 2009.
[110] M. A. Haque, H. D. Espinosa, and H. J. Lee, “MEMS forin situ testing—handling,
actuation, loading, and displacement measurements,”MRS Bull., vol. 35, pp. 375–381,
May 2010.
[111] J. Brown, A. Baca, K. Bertness, D. Dikin, R. Ruoff, and V. Bright, “Tensile measurement
of single crystal gallium nitride nanowires on MEMS test stages,” Sens. Actuators, A,
doi:10.1016/j.sna.2010.04.002.
[112] W. Kang, J. H. Han, and M. T. A. Saif, “A novel method forin situ uniaxial tests at the
micro/nano scale—Part II: Experiment,”J. Microelectromech. Syst., vol. 19, no. 6, pp.
1322–1330, Dec. 2010.
[113] R. A. Bernal, R. Agrawal, B. Peng, K. A. Bertness, N. A. Sanford, A. V. Davydov, and
H. D. Espinosa, “Effect of growth orientation and diameter on the elasticity of GaN
nanowires. A combined in situ TEM and atomistic modeling investigation,”Nano Lett.,
vol. 11, no. 2, pp. 548–555, Feb. 2011.
[114] Z. Zhang, K. Yao, Y. Liu, C. Jin, X. Liang, Q. Chen, and L.-M. Peng, “Quantitative
analysis of current-voltage characteristics of semiconducting nanowires: Decoupling of
contact effects,”Adv. Funct. Mater., vol. 17, no. 14, pp. 2478–2489, Sep. 2007.

Bibliography 99
[115] C. Ru, Y. Zhang, Y. Sun, Y. Zhong, X. Sun, D. Hoyle, and I.Cotton, “Automated
four-point probe measurement of individual nanowires inside a scanning electron mi-
croscope,”IEEE Trans. Nanotechnol., vol. 10, no. 4, pp. 674–681, Jul. 2011.
[116] T.-H. Kim, X.-G. Zhang, D. M. Nicholson, B. M. Evans, N.S. Kulkarni, B. Radhakr-
ishnan, E. A. Kenik, and A.-P. Li, “Large discrete resistance jump at grain boundary in
copper nanowire,”Nano Lett., vol. 10, no. 8, pp. 3096–3100, Aug. 2010.
[117] Y. Zhang, B. K. Chen, X. Liu, and Y. Sun, “Autonomous robotic pick-and-place of
microobjects,”IEEE Trans. Robot., vol. 26, no. 1, pp. 200–207, Feb. 2010.
[118] M. A. Haque and M. T. A. Saif, “Deformation mechanisms in free-standing nanoscale
thin films: A quantitativein situ transmission electron microscope study,”Proc. Nat.
Acad. Sci., vol. 101, no. 17, pp. 6335–6340, Apr. 2004.
[119] S. Lu, J. Chung, and R. S. Ruoff, “Controlled deposition of nanotubes on opposing
electrodes,”Nanotechnology, vol. 16, no. 9, pp. 1765–1770, Jul. 2005.
[120] B. D. Sosnowchik, J. Chang, and L. Lin, “Pick, break, and placement of one-dimensional
nanostructures for direct assembly and integration,”Appl. Phys. Lett., vol. 96, no. 15, p.
153101, Apr. 2010.
[121] Y. Ganesan, Y. Lu, C. Peng, H. Lu, R. Ballarini, and J. Lou, “Development and applica-
tion of a novel microfabricated device for thein situ tensile testing of 1-D nanomateri-
als,” J. Microelectromech. Syst., vol. 19, no. 3, pp. 675–682, Jun. 2010.
[122] Y. Ganesan, C. Peng, Y. Lu, L. Ci, A. Srivastava, P. M. Ajayan, and J. Lou, “Effect of
nitrogen doping on the mechanical properties of carbon nanotubes,”ACS Nano, vol. 4,
no. 12, pp. 7637–7643, Dec. 2010.

Bibliography 100
[123] Y. Hu, J. Zhou, P.-H. Yeh, Z. Li, T.-Y. Wei, and Z. L. Wang, “Supersensitive, fast-
response nanowire sensors by using schottky contacts,”Adv. Mater., vol. 22, no. 30, pp.
3327–3332, Aug. 2010.
[124] M. J. Gordon, T. Baron, F. Dhalluin, P. Gentile, and P. Ferret, “Size effects in mechanical
deformation and fracture of cantilevered silicon nanowires,” Nano Lett., vol. 9, no. 2, pp.
525–529, Feb. 2009.
[125] Z. Y. Zhang, C. H. Jin, X. L. Liang, Q. Chen, and L.-M. Peng, “Current-voltage charac-
teristics and parameter retrieval of semiconducting nanowires,”Appl. Phys. Lett, vol. 88,
no. 7, p. 073102, Feb. 2006.
[126] Y.-F. Lin and W.-B. Jian, “The impact of nanocontact onnanowire based nanoelectron-
ics,” Nano Lett., vol. 8, no. 10, pp. 3146–3150, Oct. 2008.
[127] A. Asthana, T. Shokuhfar, Q. Gao, P. Heiden, C. Friedrich, and R. S. Yassar, “A study on
the modulation of the electrical transport by mechanical straining of individual titanium
dioxide nanotube,”Appl. Phys. Lett, vol. 97, no. 7, p. 072107, Aug. 2010.
[128] A. A. Grinberg, S. Luryi, M. R. Pinto, and N. L. Schryer,“Space-charge-limited current
in a film,” IEEE Trans. Electron Devices, vol. 36, no. 6, pp. 1162–1170, Jun. 1989.
[129] T. Fukuda, F. Arai, and L. Dong, “Assembly of nanodevices with carbon nanotubes
through nanorobotic manipulations,”Proc. IEEE, vol. 91, no. 11, pp. 1803–1818, 2003.
[130] Y. Zhang, X. Liu, C. Ru, Y. L. Zhang, L. Dong, and Y. Sun, “Piezoresistivity charac-
terization of synthetic silicon nanowires using a MEMS device,” J. Microelectromech.
Syst., vol. 20, no. 4, pp. 959–967, Aug. 2011.
[131] L. Dong, F. Arai, and T. Fukuda, “Destructive constructions of nanostructures with
carbon nanotubes through nanorobotic manipulation,”IEEE/ASME Trans. Mechatron.,
vol. 9, pp. 350–357, 2004.

Bibliography 101
[132] E. C. Heeres, A. J. Katan, M. H. van Es, A. F. Beker, M. Hesselberth, D. J. van der
Zalm, and T. H. Oosterkamp, “A compact multipurpose nanomanipulator for use inside
a scanning electron microscope,”Rev. Sci. Instrum., vol. 81, p. 023704, 2010.
[133] L. X. Dong, F. Arai, and T. Fukuda, “Electron-beam-induced deposition with carbon
nanotube emitters,”Appl. Phys. Lett., vol. 81, pp. 1919–1921, 2002.
[134] M. Noyong, K. Blech, A. Rosenberger, V. Klocke, and U. Simon, “In situ nanomanip-
ulation system for electrical measurements in SEM,”Meas. Sci. Technol., vol. 18, pp.
N84–N89, 2007.
[135] V. Eichhorn, S. Fatikow, T. Wich, C. Dahmen, T. Sievers, K. N. Andersen, K. Carlson,
and P. Bøggild, “Depth-detection methods for microgripperbased cnt manipulation in a
scanning electron microscope,”J. Micro-Nano Mech., vol. 4, pp. 27–36, 2008.
[136] D. Jasper and S. Fatikow, “Line scan-based high-speedposition tracking inside the
SEM,” Int. J. Optomechatronics, vol. 4, pp. 115–135, 2010.
[137] Y. L. Zhang, M. L. Han, M. Y. Yu, C. Y. Shee, and W. Ang, “Automatic hysteresis mod-
eling of piezoelectric micromanipulator in vision-guidedmicromanipulation systems,”
IEEE/ASME Trans. on Mechatron., 2011, DOI: 10.1109/TMECH.2011.2106136.
[138] J. Yi, S. Chang, and Y. Shen, “Disturbance-observer-based hysteresis compensation for
piezoelectric actuators,”IEEE/ASME Trans. Mechatron., vol. 14, no. 4, pp. 456–464,
2009.
[139] S. Bashash and N. Jalili, “Robust adaptive control of coupled parallel piezo-flexural
nanopositioning stages,”IEEE/ASME Trans. Mechatron., vol. 14, no. 1, pp. 11–20, 2009.
[140] J. Li, X. Chen, and W. Zhang, “A new approach to modelingsystem dynamics-in the
case of a piezoelectric actuator with a host system,”IEEE/ASME Trans. Mechatron.,
vol. 15, no. 3, pp. 371–380, 2010.

Bibliography 102
[141] K. Kuhnen and H. Janocha, “Inverse feedforward controller for complex hysteretic non-
linearities in smart-material systems,”Control Intell. Syst., vol. 29, no. 3, pp. 74–83,
2001.
[142] W. T. Ang, P. Khosla, and C. Riviere, “Feedforward controller with inverse
rate-dependent model for piezoelectric actuators in trajectory-tracking applications,”
IEEE/ASME Trans. Mechatron., vol. 12, no. 2, pp. 134–142, 2007.
[143] U.-X. Tan, W. T. Latt, C. Y. Shee, C. Riviere, and W. T. Ang, “Feedforward controller of
ill-conditioned hysteresis using singularity-free Prandtl-Ishlinskii model,” IEEE/ASME
Trans. Mechatron., vol. 14, no. 5, pp. 598–605, 2009.