Upload
constantin-dorinel
View
56
Download
3
Tags:
Embed Size (px)
DESCRIPTION
Mecom Module K
Citation preview
Printer 10/22/03 3:01 PM Page 11
Copyright 1998-2004 NJCATE, a National Center for Advanced Technological Education
Middlesex County College, 2600 Woodbridge Avenue, Edison, New Jersey 08818-3050
Phone: (732) 906-4178 Fax: (732) 906-4662
Web Site: www.njcate.org
All rights reserved. No part of this publication may be reproduced or transmitted in any form or by any means, electronic or mechanical, including photocopy, recording, or any information storage
and retrieval system without permission in writing from NJCATE.
This material is based on work supported by the National Science Foundation Advanced Technological Education Program under NSF grant # ESI-9553749 and DUE-9813444. Any
opinions, findings, conclusions, or recommendations expressed in this material are those of the authors and do not necessarily reflect those of the National Science Foundation.
Module K: Applications of Electromechanical Systems Shamsa Anwar, M.S. Sohail Anwar, Ph.D. Richard Flack, Ph.D. Paula Ford Andrew N. Vavreck, Ph.D.
Penn State University NJCATE Publications Coordinator:
Paula Neves
TABLE OF CONTENTS
HOW TO USE THIS MODULE GUIDE.............................................................................. ..1
MECOMTRONICS MODULE K COMPETENCIES ............................................................ 2
MODULE OVERVIEW ......................................................................................................... 6
TERMINOLOGY AND CONCEPTS ..................................................................................... 8
INDUSTRIAL CONTEXT.................................................................................................... 10
PROJECT OVERVIEW ........................................................................................................ 13
SUPPLEMENTAL MATERIALS......................................................................................... 15
TECHNICAL ACTIVITIES
LEARNING ACTIVITY: MOUNT COMPRESSION TESTER DEVELOPMENT PROJECT: HYDRAULIC, PNEUMATIC, AND ELECTROMECHANICAL ACTUATOR APPLICATION #KPT1........................................................................ 16
LEARNING ACTIVITY: MOUNT COMPRESSION TESTER DEVELOPMENT PROJECT: TESTING AND TROUBLESHOOTING OF ELECTRICAL/ ELECTRONIC AND SENSING DEVICES #KPT2...29
LEARNING ACTIVITY: MOUNT COMPRESSION TESTER DEVELOPMENT PROJECT: MECHANICAL DESIGN AND FABRICATION #KPT3. ............. 42
LEARNING ACTIVITY: PRELIMINARY DESIGN #KST1 ............................................. 63
LEARNING ACTIVITY: ELECTRONIC CONTROL AND SENSING INTEGRATION #KST2..................................................................................................................................... 76
MATHEMATICS ACTIVITIES
LEARNING ACTIVITY: STATISTICAL CONCEPTS #KSM1 ........................................ 93
LEARNING ACTIVITY: SWITCHING ALGEBRA AND COMBINATIONAL LOGIC SYSTEMS #KSM2.... ............................... 108 APPENDIX A ..124
SCIENCE ACTIVITIES
LEARNING ACTIVITY: MECHANICAL AND THERMAL PROPERTIES OF MATTER #KSS1 ................................................................................................................................... 125
LEARNING ACTIVITY: CONTROLLING OSCILLATIONS #KSS2 ............................ 140
RESEARCH, COMPOSITION, AND PRESENTATION (RCP) ACTIVITIES
LEARNING ACTIVITY: MOUNT COMPRESSION TESTER DEVELOPMENT PROJECT: DATA COLLECTION AND REPORTING #KPC1 ...................................... 151
LEARNING ACTIVITY: MOUNT COMPRESSION TESTER DEVELOPMENT PROJECT: TRAINING PROGRAM DEVELOPMENT #KPC2. ................ 160 EVALUATION FORMS .. ......170
Module K Student Guide
2004 NJCATE
1
HOW TO USE THIS MODULE GUIDE
This module guide contains several unique features: Competencies Each activity covers a list of technical competencies, which are researched and verified by industry representatives. These competencies provide the conceptual framework for students to develop knowledge and skills required by industry.
The list of competencies is broken out by Technical, Physical Science, Mathematics, and Research, Composition and Presentation (RCP). The level of mastery attained for each competency as it relates to the material covered in corresponding modules, is indicated as Introduce (I), Develop (D), Master (M), and Reinforce (R). Therefore, you will find in the competency list an indication of the level of mastery to be attained. Projects Each module includes an industry-related capstone project. Learning activities in each module are classified by whether they are project-embedded (activities essential to the development and implementation of the project) or stand-alone (activities guiding the student in the development of the core competencies of technical, mathematics, physical science, and research, composition, and presentation skills). The corresponding equations, tables, and figures for each activity follow the same classification system. Activity Codes An activity numbering key is followed throughout the module. For example, in codes KPT1 and KSM1, the first letter of the code signifies that this is an activity of Module K. The second letter can be either a P for a project embedded activity or an S for a stand-alone activity. KSM1 then is a stand-alone activity. The third letter represents either T for Technical, S for Physical Science, M for Mathematics, or C for Research, Composition and Presentation. KSM1 is a mathematics activity. The last digit in the code represents the order of the activity in a particular discipline. KSM1 is the first mathematics activity in Module K. Use this key code to identify each learning activity.
Module K Student Guide
2004 NJCATE
2
MECOMTRONICS MODULE K COMPETENCIES
The list of competencies in this module is broken down by Technical, Physical Science, Mathematics, and Research, Composition, and Presentation (RCP). The codes I, D, M or R in each competency indicate:
Introduce (I), Develop (D), Master (M), and Reinforce (R).
A spiral approach to learning reinforces competencies as they are revisited each semester. Technical Competencies:
R 1.6 Create and modify spreadsheets for presenting data in graphical
form. I,D 1.7 Construct, modify and manage databases; use forms, perform
queries, and generate reports. D 1.8 Create computer-generated visual aids using application software
and imported graphics. R 3.7 Identify and create electrical and logic diagrams utilizing a library
of appropriate symbols. M 3.12 Read and interpret engineering drawings, wiring diagrams,
schematics and process diagrams. D 4.7 Demonstrate knowledge of electromagnetic principles, operation of
electromagnetic devices and their use in systems. D 4.8 Demonstrate knowledge of electric motors and generator types and
applications. D 4.9 Select and specify electric motors, generators and transformers.
Perform measurements to determine electric motor characteristics. I,D 4.25 Employ semiconductor switching devices in power control systems
(ON/OFF, phase control, frequency control). I,D 6.3 Test, adjust, and repair electromechanical equipment. D 6.8 Maintain equipment maintenance and repair records. D 6.13 Maintain, troubleshoot, and repair hydraulic and pneumatic
control equipment and systems. R 7.1 Use measuring devices for measuring linear and angular quantities. R 7.2 Use analog and digital meters, oscilloscopes, and virtual instruments
to measure electrical and electronic parameters. D 7.6 Use a variety of instruments to determine the hardness, toughness
and impact of a material. R 7.7 Evaluate the measurement specification and select the appropriate
instrument to accurately perform the measurement.
Module K Student Guide
2004 NJCATE
3
R 7.9 Record and present data for evaluation and analysis. R 7.10 Evaluate and analyze data obtained from measurements. D 8.1 Employ safety procedures using manufacturer guidelines and
industry and government standards when working with electrical/electronic equipment.
D 8.4 Demonstrate knowledge of effective troubleshooting techniques; use manufacturers' documentation and software, flow charts, and diagrams for efficient troubleshooting and repair of electrical/electronic system problems.
D 8.5 Calibrate/adjust electrical equipment. D 9.2 Assemble or disassemble electrical and mechanical components and
systems. D 9.3 Select and use appropriate tools needed for assembling and
disassembling machine components. D 9.9 Calibrate/adjust mechanical equipment. I,D 9.13 Demonstrate knowledge of characteristics, functions, and
applications of power transmission systems based on mechanical and/or fluid components.
Physical Science Competencies:
R 15.A Demonstrate knowledge of the definitions of fundamental physical
quantities such as: length, time, mass, charge, etc. R 15.B Demonstrate knowledge of the definition of derived physical
quantities such as: velocity, acceleration, force, torque, energy, momentum, current, voltage, resistance, pressure, viscosity, power, inductance, capacitance, hardness, stress, strain, magnetic field strength, flux, etc.
D 15.1 Apply kinematics equations for translation and rotation to describe the motion of rigid bodies.
D 15.2 Draw (sketch) the free body diagram of a structure; determine the forces and/or torques acting on the structure by applying Newtons Second law.
D 15.8 Calculate the stress on an object from a measurement of the strain.
R 15.9 Distinguish between gauge pressure and absolute pressure. D 15.10 Calculate the pressure exerted by or on a fluid. R 15.11 Use Pascals Law to predict the ratio of the forces on the two
pistons of a hydraulic and/or pneumatic press. D,M 15.12 Analyze and predict the rate of fluid flow through a system by use
of Bernoullis Law. D 15.13 Describe the effect of viscosity on flowrate and the variation of
viscosity as a function of temperature.
Module K Student Guide
2004 NJCATE
4
D 15.15 Use Hookes Law, the equations of motion and the law of conservation of energy to predict the frequency, period and amplitude of a mechanical oscillator.
M 15.16 Apply the concepts of simple harmonic motion (amplitude, frequency, energy transformations) to tuned circuits and mechanical oscillators.
M 15.17 Define the three types of damping (under, critical, over) and describe the motion associated with each.
R 15.21 Determine the capacitance of a capacitor in terms of its physical characteristics.
R 15.22 Calculate the energy stored in a system of capacitors. R 15.23 Predict and measure the time constant of a RC circuit. R 15.24 Predict and measure the time constant of a RL circuit. M 15.25 Measure current as a function of frequency and calculate the
resonant frequency of an AC circuit. M 15.26 Predict and measure the power of an AC circuit. R 15.27 Predict and plot B (total magnetic field) vs. Bo (externally applied
magnetic field) for a paramagnetic, diamagnetic and ferromagnetic material.
M 15.28 Calculate the magnetic force on a current carrying wire, and the torque on a current loop.
R 15.29 Predict the self-inductance of a coil in terms of its geometry. R 15.30 Calculate the energy stored in a system of inductors. R 15.40 Differentiate between conductors, semiconductors and insulators
based on their atomic structure. I 15.48 Use the law of conservation of energy to predict state and
temperature changes of a thermally isolated system. I 15.49 Employ the first law of thermodynamics and the gas laws to
predict the state variables of an ideal gas. Math Competencies:
R 14.1 Perform numerical computations using decimals, fractions, and
percents. R 14.2 Raise numbers to powers and take roots of numbers. D 14.3 Estimate and approximate answers to multiple operation problems,
and evaluate the reasonableness of the results. R 14.4 Use ratios and proportions to solve technical problems. R 14.5 Use scientific, engineering and prefix notation to simplify
computations and to represent data. R 14.6 Use a calculator to perform multiple operation problems. R 14.7 Convert between U.S. customary and SI units.
Module K Student Guide
2004 NJCATE
5
R 14.8 Translate problem situations into their symbolic representations and use those representations to solve the problem.
R 14.9 Solve technical problems involving polynomial, rational, and radical equations graphically, numerically and analytically.
D 14.10 Identify, describe, compare and classify geometric figures. R 14.13 Graph empirical data and determine the function that the graph
represents. R 14.14 Graph a straight line on a rectangular coordinate system, and
determine its slope and intercept from the graph of a linear function.
D 14.27 Analyze collected data and use probability and statistical models to make decisions about technical situations.
D 14.28 Collect, organize and describe data from real world situations. D 14.30 Use Boolean algebra to perform logic operations. RCP Competencies:
D 13.1 Convey ideas and facts by composing, revising and editing
memoranda and letters, reports, articles, proposals, and essays. D 13.2 Use varied and precise technical language appropriately in
written documents and oral presentations. D 13.3 Determine the form, length, content and styleeither oral or
writtenfor presenting material to an intended audience. D 13.4 Eliminate errors in Standard American English (SAE) grammar,
syntax, usage, punctuation and spelling. D 13.9 Use specific factual data to provide instructions and explanations
of processes and technical concepts, and to recommend a course of action.
D 13.10 Classify information into related groups, and analyze data to discover or present similarities and differences, to discover or present relationships, to explain unfamiliar concepts and to highlight specific details.
D 13.12 Plan, organize, rehearse, and make effective oral presentations. D 13.13 Prepare visual materials for oral presentations.
Module K Student Guide
2004 NJCATE
6
MODULE OVERVIEW
Applications of Electromechanical Principles
Apply electrical, electronic, and mechanical principles to the development and installation of
systems designed to perform a useful task. Study the life-cycle repair and maintenance requirements for electromechanical systems.
Learning Activity Code Time Allocation
Introductory Session 1.0 hour Hydraulic, Pneumatic, and Electromechanical Actuator Application
KPT1 5.0 hours
Testing and Troubleshooting of Electrical/Electronic and Sensing Devices
KPT2 4.0 hours
Mechanical Design and Fabrication KPT3 9.0 hours Preliminary Design KST1 4.0 hours Electronic Control and Sensing Integration KST2 4.0 hours Statistical Concepts KSM1 2.0 hours Switching Algebra and Combinational Logic Systems KSM2 2.0 hours Mechanical and Thermal Properties of Matter KSS1 6.0 hours Controlling Oscillations KSS2 2.0 hours Data Collection and Reporting KPC1 2.0 hours Training Program Development KPC2 4.0 hours
TOPIC
OBJECTIVES
LEARNING ACTIVITIES
Module K Student Guide
2004 NJCATE
7
To ensure your success in this module, the following prerequisites and corequisites are recommended:
Prerequisites
Module B: Electrical and Mechanical Components and Systems Module D: Electrical and Mechanical Principles
Corequisites
Module H: Electrical and Mechanical Power Components and Applications
PREREQUISITES/COREQUISITES
Module K Student Guide
2004 NJCATE
8
TERMINOLOGY AND CONCEPTS
Upon completion of this module, you should be able to use in context the following terminology and concepts: absolute pressure empirical AC circuit experts AC motors ferromagnetic amplitude field-effect transistor (FET) angles first law of thermodynamics B (total magnetic field) flat-file database B0 (externally applied magnetic field) flowrate Bernoullis constant fluid Bernoullis Law fluid power cylinders binary variable fracturing bipolar junction transistor(BJT) frequency diagram Boolean function breakdown gas turbine engines brittle gauge pressure calibrate gear motor capacitor generalists cells graphics Charpy test hardness circuit breaker harmonic oscillators coil heat combinational logic systems heat of fusion complex audience heat of vaporization compressors histogram conductor hydraulic conservation of energy hydraulic motors damping ideal gas database impact database management system inductive statistics DC motors inductor descriptive statistics insulator diamagnetic internal energy dielectric junction field-effect transistor(JFET) displacement kinematics DPST (Double Pole Single Throw) kinetic energy ductile linear function elastic limit linear spring elasticity linear variable differential transformer (LVDT)elastomer magnetic force elastomer isolators mean electromagnetic measures of central tendency electropneumatic regulator measures of dispersion
Module K Student Guide
2004 NJCATE
9
mechanical linkages silicon-controlled rectifier(SCR) median simple harmonic motion
sine wave metal-oxide semiconductor field-effect transistor(MOSFET) SI unit mode slope and intercept momentary push-button switch solenoids motor SPDT relay mount specific heat / specific heat capacity NC (normally closed) push button switch specimen NO (normally open) push button switch spread object-oriented database spreadsheet operational amplifiers spring constant oscillatory motion SPST (Single Pole Single Throw) Pascals law standard deviation period state periodic statistical analysis phase control statistics PN junction diode stepper motors pneumatic strain pneumatic motors stress population switch potential energy switching algebra power tensile stress primary audience thermally isolated query thermodynamic system range thyristor RC circuit time constant rectangular coordinate system torque rectifiers torsion relational database toughness relay transistor relay control circuit transmitter resonance triac resonant frequency troubleshooting rigid truth table RL circuit turbine Rockwell test turned circuits root ultimate strength rotary switch unijunction transistor rotary variable differential transformer U.S. customary unit sample viscosity secondary audience workbook semiconductor working fluid semiconductor switching device worksheets servomotors Youngs Modulus shroud zener diode
Module K Student Guide
2004 NJCATE
10
INDUSTRIAL CONTEXT
Systems Integration
Intermech Ltd. is a small electromechanical systems integrator. The company, which has 100 employees, designs, develops, fields, and maintains electromechanical devices such as mechanized part feeders, metal-forming equipment, automated packaging and labeling equipment, and machine vision-based inspection systems. Much of the companys work involves integrating Original Equipment Manufacturer (OEM) components into complete automated electromechanical systems. The company primarily serves the metalworking industry.
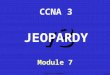
Gas turbine engines have sets of disks, around which are mounted many blades, like blades on a fan. These fans serve as compressors of incoming air (in the compressor section) or extract energy from the jet exhaust to operate the compressor (in the turbine section). Each blade has a root area, which mounts in the disk, and a shroud area, which mates to adjoining blades to form a ring (Figure 1).
This ring is part of the seal for the outside edge of the compressor or turbine fan. It is very important that the root and shroud have a specific angle (around the long axis of the blade) relative to each other. If they do not, shrouds in the outer ring can wear against each other incorrectly, and can experience excessive stress. The angle can change because of creep due to the high temperatures and pressures the blades may experience.
During maintenance, when blades are removed from their disks for inspection and repair, they undergo a process of inspection and adjustment of the root-to-shroud angle. The angle is measured and the blades are carefully twisted to restore the correct angle. A manual process is currently used, during which the blade root is held in a fixture. The blade shroud is twisted by hand with a bar clamped to the shroud, then measured, then re-twisted. The manual process is inaccurate, leads to too many scrapped blades, and is too slow.
The student is part of a design and development team within Intermech Ltd., an electromechanical design and development company, which has been contracted to design,
INDUSTRY TYPE
COMPANY PROFILE
PROBLEM/SITUATION
Module K Student Guide
2004 NJCATE
11
construct, install, and maintain a prototype, automated electromechanical system to twist used gas turbine engine blades to restore specified root-to-shroud angles for reuse.
root
blade airfoil
shroud
1.5 inches
Figure 1. J-52 High-Pressure Turbine Engine Compressor Blade
The industrial development encompasses three major phases:
Phase I: Specification of Machine Requirements
1. Develop database of part specifications
2. Prepare graphs of blade torque-strain response ranges
3. Review operator requirements (cycle times, ergonomics)
4. Report on blade forming requirements
Phase II: Machine Design, Development and Integration
5. Specify hydraulic components for blade twist
6. Specify electromechanical components for blade shroud gripping
7. Machine mechanical design and fabrication
8. Design and fabricate machine electrical/electronics
9. Operate prototype machine on sample blades, gathering and analyzing data
on blade torque response to strain
10. Measure blade material properties before and after forming
11. Report on machine design and testing
Module K Student Guide
2004 NJCATE
12
Phase III: Installation and Life-Cycle Support
12. Install machine at customer site
13. Adjust head design, mechanics, electronics and hydraulics
14. Provide training for customer operator personnel
15. Maintain machine, field troubleshoot and repair
Module K will help students understand the process of design, development, and maintenance through activities involving all areas of product development and fielding.
Module K Student Guide
2004 NJCATE
13
PROJECT OVERVIEW
Module Ks Mount Compression Tester Development Project focuses on electromechanical system integration. Students will:
Develop, test, install, and maintain an elastomer mount compression tester. Use a pneumatic cylinder to compress an elastomer specimen. The compression of the
specimen and the force on the specimen will be measured electronically.
Part 1: Hydraulic, Pneumatic and Electromechanical Actuator Application (KPT1)
1. State the Problem
2. State the Goal
3. Data Collection - Industrial Applications
4. Approach Listing
5. Actuator Approach Weighting and Selection
Part 2: Testing and Troubleshooting of Electrical/Electronic and Sensing Devices (KPT2)
1. LVDT Testing
2. Using an Operational Amplifier
Part 3: Mechanical Design And Fabrication (KPT3)
1. Design the Frame
2. Fabricate and Assemble Components of the Mount Compression Tester Frame
3. Assemble and Test the Complete Mount Compression Tester
4. Measure Mount Parameters
5. Calculate the Modulus of Elasticity and Power
6. Fluid Flow Calculations
7. Thermodynamic Relationships
PROJECT NAME, FOCUS & DESCRIPTION
PROJECT PROCEDURE
Module K Student Guide
2004 NJCATE
14
Part 4: Data Collection and Reporting (KPC1)
1. Use Word Processing to Write a Memo Report
2. Write a Report Using Data from the Database Created in KST1
Part 5: Training Program Development (KPC2)
1. Find Examples of Warnings
2. Prepare a Diagram of the Mount Compression Tester
3. Make a List of the Steps in Your Instructions
4. Rehearse the Presentation
5. Make Training Presentation to the Class
The project will result in the development of an electromechanical/pneumatic compression tester. The project will serve as the core of the technical activities, and will encompass activities involving electronics, mechanics, pneumatics, design, maintenance, troubleshooting, assembly, measurement, safety, and the machine shop.
OUTLINE OF PROJECT OUTCOMES OR SPECIFICATIONS
Module K Student Guide
2004 NJCATE
15
SUPPLEMENTAL MATERIALS
Bogart, Theodore F. Jr. 1992. Introduction to Digital Circuits. Glencoe. Dueck, Robert K. 1994. Fundamentals of Digital Electronics. West Publishing Company. Floyd, Thomas L. 1997. Principles of Electric Circuits. New Jersey: Prentice-Hall. Honeycutt, Richard A. 1986. Electromechanical Devices. New Jersey: Prentice-Hall. Kissell, Thomas E. 1997. Industrial Electronics. New Jersey: Prentice-Hall. Ledolter, Johannes and Claude W. Burrill. 1999. Statistical Quality Control: Strategies and Tools for Continual Improvement. John Wiley and Sons. Majumdar, S. J. 1996. Pneumatic Systems. New York: McGraw-Hill. Maloney, Timpoty J. 1996. Modern Industrial Electronics. New Jersey: Prentice-Hall. Norton, Robert L. 1992. Design of Machinery. New York: McGraw-Hill. Reeves, William W. 1987. The Technology of Fluid Power. New Jersey: Prentice-Hall. Smith, Gerald M. 1998. Statistical Process Control and Quality Improvement. New Jersey: Prentice-Hall.
Allied Electronics Catalog (1-800-433-5700), www.allied.avnet.com
Jameco Catalog (1-800-831-2424), www.jameco.com
Mouser Electronics Catalog (1-800-346-6873), www.mouser.com
http://www.ggrweb.com for GeoWeb jobssearch in engineering technology.
http://www.prosci.com for discussions of product realization processes, best practices, and participating companies.
http://www.asme.org/codes/ for ASME standards and reports.
BOOKS
INDUSTRIAL CATALOGS
WEBSITES
Module K Student Guide
2004 NJCATE
16
Project-Embedded Stand-Alone
5 hours
To develop an understanding of the application of motors and generators, and hydraulic and pneumatic power transmission devices by selecting an actuator approach for use in the mount compression tester.
Understand the engineering design process Understand the range of suitable applications for actuators Explore applications of hydraulic, pneumatic, and motor actuators in real industrial machines Identify appropriate types of actuators to compress elastomer specimens in the mount
compression tester
Establish performance requirements for selected actuators
LEARNING ACTIVITY MOUNT COMPRESSION TESTER DEVELOPMENT PROJECT: HYDRAULIC, PNEUMATIC, AND ELECTROMECHANICAL ACTUATOR APPLICATION KPT1
TIME ALLOCATION
STATEMENT OF PURPOSE
OBJECTIVES
Module K Student Guide
2004 NJCATE
17
Your instructor will assess you on the following:
Correct answering of all review questions within this activity Identification of appropriate actuators Identification of industrial actuator applications
The blade twist machine must have elastomer (elastic, rubber-like material) isolators installed on its base to reduce the transmission of vibration from the machine to the floor on which it is mounted. The proper selection of the elastomer for the isolation mount requires the use of a tensile test machine. Your company currently employs the tensile test machine to measure the compression characteristics of samples of material. Your team is assigned to automate this purely mechanical tensile test machine to facilitate the selection of the isolation mount elastomer.
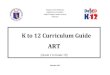
The current machine uses a simple, mechanical worm screw-spring arrangement to compress a sample in incremental steps (see Figure KPT1-1). The specimen to be tested is held between two plates that can slide on four rods. The rods are attached to end plates that do not move. A crank turns a worm screw, which pushes on the first floating plate (specimen plate). The displacement of the specimen plate relative to the spring plate is measured with a scale. This measurement is used to calculate the strain on the specimen. The deflection of the spring (the relative displacement of the spring plate and right end plate) gives a measurement of the force on the specimen, which can be used to calculate the stress.
crankframe rods
worm screw specimen
left end plate
specimen plate
springspring plate
right end plate
Figure KPT1-1. Current Compression Tester
ASSESSMENT
SITUATION
Module K Student Guide
2004 NJCATE
18
The compression tester is slow, inaccurate, and very difficult to maintain. Your team is assigned to apply electromechanical devices to automatically:
1. compress the sample 2. measure the force (stress) on the sample 3. measure the compression (strain) on the sample
In this activity, your design team must identify an initial approach for an actuator to replace the worm screw and mechanical crank in the device currently used to compress elastomer mounts.
In order to modify the compression tester, your engineering team must make an initial selection of the types of actuators that can be used to compress the elastomer mounts. Later, in learning activities KPT2 and KPT3, the selected actuator will be combined with both the compression testers mechanical structure, and the electronics for sensing and power transmission. You shall then prepare a detailed machine design. In KPT1, you will be following the engineering design process, which is a formal means of addressing a problem by identifying and following through with a selected approach. The process helps designers be unbiased toward their own preferences by performing a thorough, objective identification of approaches, and then rating the value of the various approaches in different categories. The process also helps uncover potential problems that could cause delays or incur costs in later parts of the development.
THE ENGINEERING DESIGN PROCESS
1. State the Problem Clearly identify just what problem is being addressed. Try to be as general as possible. For instance, if you are designing a new vacuum cleaner because an older model makes too much noise, do not say, The old models fan is too noisy. Maybe it is not just the fan, but other parts of the machine, and you will have just biased the process. The correct statement would be, The cleaner is too noisy.
2. State the Goal Clearly and briefly state the objective of the project. For the vacuum cleaner example above, the goal might be, Reduce the noise level of the cleaner by 10 decibels without increasing the unit production cost. Any performance specifications required of the design should also be identified and listed at this time.
BACKGROUND
Module K Student Guide
2004 NJCATE
19
3. Collect Background Information Examine potential approaches to solve the problem. What have others done in the past? Identify analysis tools you might have to use, including applicable equations, computer design tools, books, articles, patentsanything that builds up your background enough to tackle the problem.
4. Identify Potential Approaches List as many approaches to solve the problem as possible, keeping in mind that no idea is a bad one at this point. A good technique is called brainstorming, where a group gets together in a room and writes down potential approaches that come to mind.
5. Analyze Potential Approaches Determine which measures or metrics shall allow you to make an unbiased evaluation of each approach. All approaches are analyzed for performance, cost, impact on other parts of the system, etc. For example, in the vacuum cleaner problem, some categories might include risk, cost, weight, tooling impact, supply impact, and size. Each of these categories gets a score for each approach.
6. Select Single Approach Choose one approach with which to proceed. Your analysis should have yielded scores in different categories for each approach. The most common way now to select an approach is to weight each category by how important it is. For instance, if cost is most important, the weighting for cost might be 5, while the weighting for weight, which is less important, might be 1. Each category score is then multiplied by the weighting factor for that category, and the total weighted score for each approach is calculated by adding up the weighted category scores. The highest composite score indicates the best approach.
7. Modeling and Testing After choosing your conceptual design, model and test this approach in more detail than you used in the analysis step above. The model might be a real, physical construction, like an aircraft wing in a wind tunnel, or a computer model. This step allows you to try out and refine many scenarios on a small scale, before selecting a final design.
8. Production Use the final design to produce tooling, manufacturing equipment, and a manufacturing process, ending in production of the product.
In this activity, you shall explore the first six steps of the engineering design process. You will state the problem and goal, and identify and select approaches to the actuation needs of the mount compression tester. First, you need to review a little background information on the types of actuators from which you have to choose.
ACTUATOR TYPES Actuators are devices that convert or transmit energy to apply mechanical force or torque to a mechanism. They are often provided with some control of position or speed. A range of
Module K Student Guide
2004 NJCATE
20
alternatives to apply force or torque exists, including electrical motors and fluid power systems. Mechanical linkages can also be applied to trade off force or torque for speed from an actuator to some other part of a mechanism.
DC Motors The primary characteristic of DC motors is that their torque and speed vary strongly in some way. A permanent magnet DC motor might have a torque-speed curve that resembles the one in Figure KPT1-2.
torque
speed
voltageincrease
Figure KPT1-2. DC Motor Speed-Torque Curves
Therefore, if the motor voltage is held constant, a given load would result in a given speed for the motor, with higher loads increasing torque on the motor and reducing speed. If the application requires constant speed for a range of loads, such behavior would be unacceptable.
DC motors come in a number of forms, each with functions and suitable types of applications. The most common type is the series-wound motor, which has the field coil in series with the armature coil. These motors are called universal motors, because they can be operated from either AC or DC. Because they are light and cheap, they are used in many portable power applications like hand drills.
One solution to the speed-load variation problem is to use a speed-controlled DC motor, which has electronics to vary the current to the motor to adjust for different loads. This type of motor will run from an AC source as well since the controller converts AC to DC. Speed-controlled DC motors, however, are more expensive than uncompensated DC motors.
As a reminder, DC generators function as the reverse of the DC motor operation. A rotary input to the motor rotor generates a current in the field coil. Brushes are used to switch the coil current direction through the commutator, producing a DC waveformthe more windings available, the smoother the output.
AC Motors AC motors are often the most inexpensive solution to continuous rotary motion. Most of the motors in use in industry are AC motors. AC motors can be found with a variety of torque-speed
Module K Student Guide
2004 NJCATE
21
curves, most of which are much flatter than DC motor curves. That is, the motor speed does not vary much over a range of loads.
AC motors are often limited to only a few speeds, which are a function of the AC line frequency. The most common no-load speeds are 1725 and 3450 revolutions per minute (rpm). More expensive synchronous AC motors can give corresponding speeds of 1800 and 3600 rpm exactly, which represent no slippage from the standard motors. If speeds other than those related to the AC line voltage are needed, a common solution is to employ a gearbox to reduce or increase the speed (with a corresponding change in torque, of course).
AC generators (usually called alternators) do not use a commutator. The simple rotation of the armature within the field coil creates an AC output. The alternator in your car, for example, outputs AC, which is rectified into DC to charge the battery. The battery in turn provides field current for the alternator.
Servomotors Servomotors have electronic speed controls that automatically adjust the motors current flow in response to the tachometers measurement of the motor speed. The motor in the system can be either AC or DC. The controller compares the tachometer speed to the commanded speed, and adjusts the current to compensate. Servomotors are capable of extremely precise positioning of a load but are very expensive and have lower power and torque capacity than straight AC or DC motors.
Gearmotors Gearmotors represent one solution to the inability of straight motors to operate below several hundred RPM, and to the inefficiency, complex circuitry, and expense of stepper and servomotors. Incorporating a gearmotor, a gearbox within the motor housing, provides, in most cases, a smaller shaft output speed than the motor speed and a larger torque output. With the integrated gearbox, which can allow for a straight, offset, or angled shaft output relative to the motor rotor shaft, maintenance will be slightly increased, and efficiency, in comparison to straight motors, will be reduced. The cost will also be higher than for straight motors.
Stepper Motors Stepper motors have toothed rotors and specially designed field coils to allow the rotor to turn in very small, angular increments (or small steps). The motor has complex control circuitry to maintain a speed (steps per second) or position very accurately. Stepper motors can withstand lower torque loads than AC or DC motors, generally, and are expensive.
Pneumatic and Hydraulic Cylinders (or Fluid Power Cylinders) Fluid power cylinders are linear actuators (often pistons in cylinders) which give a limited stroke in a straight line. They are preferable in situations where straight-line motion is required but actuator speed is not an issue. If speed control is necessary, expensive servovalves will do the
Module K Student Guide
2004 NJCATE
22
job, but at a cost. Output forces can be very high, especially for hydraulic systems. If fluid sources are already available, the cost of fluid power systems can be very low. However, the cost for a system will be very high if a hydraulic or a pneumatic power source is not available. Also, in the case of hydraulic devices, there exists potential for contamination of the machine with oil.
Pneumatic and Hydraulic Motors Pneumatic and hydraulic motors are rotary devices using hydraulic or pneumatic power that function in a similar way to the pumps used to pressurize fluid in hydraulic or pneumatic cylinders. However, instead of inputting rotary motion to yield a pressure increase, these devices reverse the process, inputting pressure to extract rotary motion. These devices share the same advantages and disadvantages as hydraulic and pneumatic cylinders, including high cost (if a hydraulic or pneumatic power source is not available), limited speed and position accuracy, and, for hydraulic devices, the potential for contamination of the machine with oil.
Solenoids Solenoids are purely electromechanical devices that use a coil to move a magnetic core very rapidly over a small stroke. They are very cheap and compact, but have low load capability and poor speed control. One very common application is in camera shutters and in electric car door locks, where their simple construction, small size, high speed, and low cost are major advantages.
Mechanical Linkages Mechanical linkages, which can multiply available force or displacement or alter the direction of power transmission, can be joined to any of the devices described above. Gears are just like rotary linkages, trading torque for speed or displacement. A pneumatic cylinder, which produces only a limited force, can be used to move a linkage that can multiply the force by the lever effect while the stroke is reduced. Linkages can be made inexpensively, and are low maintenance, especially if pinned (rotary) joints are used.
high force,small stroke
low force,large stroke
pneumatic cylinder
Figure KPT1-3. Mechanical Linkages
Module K Student Guide
2004 NJCATE
23
MACHINE DESIGN REQUIREMENTS Returning to the engineering design process that you shall undertake, each teams goal statement must include a listing of the design performance requirements for the mount compression tester, as shown below.
Table KPT1-1. Performance Specifications for Mount Compression Tester Actuator
Maximum force 500 pounds (high)
Maximum displacement 2 inches (moderate)
Portability High
Position accuracy 0.01 inches (high)
Maximum speed 1 inch per second (low)
Speed accuracy 0.1 inch per second (low)
Actuator cost Very low
Hydraulic power availability None expected
Pneumatic power availability Yes
Note: Remarks in parentheses refer to the relative importance of the criteria listed.
Identify and discuss real industrial applications of motors, generators, and hydraulic and
pneumatic cylinders
Brainstorm actuator applications Select an actuator type for compressing the specimen
TEAM EXPLORATION
Module K Student Guide
2004 NJCATE
24
State the Problem In this task, your team will develop, discuss, and refine a statement of problem involving the selection of actuator types for the mount compression tester.
Step Result 1. Write down a statement of the problem that
your team is trying to solve, as clearly and briefly as possible.
1. Each team prepares a problem statement.
2. Share your teams problem statement with other teams in the class.
2. Class teams share problem statements.
3. Discuss your problem statements. 3. The class discusses problem statements. 4. Select one of the teams problem statement
to use for the activity. 4. Teams select a single problem statement for
the activity.
1. Are the problem statements from different teams similar? 2. How do they differ? 3. Why should the problem statement be written as broadly as possible?
Statement of Goal In this task, your team will develop, discuss, and refine a statement of the goal of the project involving selection of actuator types for compressing specimens.
Step Result 1. Write down as clearly and briefly as
possible a statement of the goal of your teams actuator project.
1. Each team prepares a statement of the project goal.
2. Share your teams goal statement with other teams in the class.
2. Class teams share project goals.
3. Discuss your goal statements. 3. The class discusses project goals.
TASK #1
REVIEW QUESTIONS
TASK #2
Module K Student Guide
2004 NJCATE
25
4. Select one teams goal statement to use for the activity.
4. The class chooses a single goal statement for the activity.
5. Review the list of performance specifications given in Table KPT1-1.
5. Teams review the performance requirements for the actuator.
1. Why should the goal statement be written as broadly as possible?
Collect Background Information In this task, you will individually collect data on examples of the actuator types described in the Background section of this activity. You will learn about real-world applications of the various actuator types, and discuss the applicability of these actuators to the compression tester design.
Step Result 1a. Outside of class time (or in class if time and
facilities permit), identify real-world applications of each of the potential actuator types, using:
The Internet Product literature Observation of actual industrial
equipment or equipment at your school
Any other source b. Outside of class time, gather one example of
each type of actuator from the Background section of this activity. For instance, construction equipment often uses hydraulic actuators for providing force to parts of a mechanism, like the bucket of a loader. Write a short paragraph on how the loader uses a hydraulic cylinder, and include a small sketch of the set-up. Do this for all of the actuator types.
1a. Team members produce lists of examples of actuators in use in industry.
b. Team members prepare written summaries on the use of each type of actuator provided in the Background section.
REVIEW QUESTIONS
TASK #3
Module K Student Guide
2004 NJCATE
26
2. Bring your examples to class and discuss
with the other students. Determine if some of the applications are relevant to the tester design problem, and list them.
2. Teams produce a list of actuator examples that are relevant to the mount tester.
1. Where are some potential sources for approaches? 2. What other types of background information will you need?
Identify Potential Approaches In this task, you will list approaches to the actuator selection problem.
Step Result 1. Discuss with your team the actuation
problem and identify potential approaches. Do not discard any potential approach. You may use the industrial examples you found to help suggest approaches.
1. Teams discuss the actuation problem and identify potential approaches.
2. Submit all potential approaches to the instructor for identification and listing on the blackboard. Do not discard any approach unless it is a duplicate of another.
2. The instructor lists all the teams potential approaches.
3. Write down the complete list of approaches. 3. Each student records a list of potential approaches.
1. Why should you not immediately discard approaches that you feel are clearly not going to work very well?
REVIEW QUESTIONS
TASK #4
REVIEW QUESTION
Module K Student Guide
2004 NJCATE
27
Analyze Potential Approaches and Select a Single Approach In this task, you will weight the actuator approaches objectively and select the best overall approach.
Step Result 1. List categories in which you will rate the
actuator approaches for the mount compression tester. Some potential categories are:
Cost Torque Angular speed accuracy Power source compatibility Maintenance Portability
1. Teams list categories in which actuator approaches will be rated.
2. Discuss within your team and select weightings for each category. Use your best judgment as to how to weight the categories. For instance, the machine MUST produce the force and displacement specified, but cost may be more flexible.
2. Each team selects weightings for each category.
3. List each approach for the actuation design on the board.
3. Each team lists the approaches for the actuation design on the board.
4. Next to each approach, create columns for all the rating categories and a last column for the total score for each approach. The table on the board should look something like the example below, Table KPT1-2.
4. Each team produces a chart on the board showing approaches and categories.
5. Average the category weightings from each team. (Note: Since there may be some variation among the selected rating categories from each team, average those weightings whose categories were chosen by more than one team.)
5. Teams average the weightings assigned by each team to the various rating categories.
TASK #5
Module K Student Guide
2004 NJCATE
28
Table KPT1-2. Example of Actuator Approach Table
Rating Categories
Actuator Approach Cost Size Force Speed Total
Score Weighted Score
Score Weighted Score
Score Weighted Score
Score Weighted Score
1. DC motor with worm gear 2. DC motor with linkages 3. Pneumatic cylinder 4. etc.
6. List the category weightings next to the
category names at the top of the chart. For instance, Force (5).
6. Teams list the category weightings.
7. Within each team, score each of the approaches for every category.
7. Each team scores their approaches.
8. As a class, average the scores for each approach, weight them, and enter the weighted value in the chart.
8. The class produces a list of scores for all approaches.
9. Add up the weighted values for each approach and enter the sum in the last column.
9. The class produces a sum of weighted scores for each approach.
10. Identify the approach having the highest overall weighted score.
10. The class selects the highest rated actuation approach that will replace the mechanical crank and worm screw in the current compression tester.
11. Discuss the selected approach. 11. Teams discuss the chosen approach.
1. How is the weighting for each category selected? 2. What would be the impact of a change to one of the categories after the process is complete
(e.g., if cost suddenly became the most important, for instance, due to budget reductions)?
REVIEW QUESTIONS
Module K Student Guide
2004 NJCATE
29
Project-Embedded Stand-Alone
4 hours
To learn how to test and troubleshoot electrical/electronic devices and sensors which can be integrated into the mount compression tester.
Learn how a displacement transducer works Learn how an operational amplifier works Understand the general principles of troubleshooting Learn how to troubleshoot various electrical/electronic devices
Your instructor will assess you on the following:
Knowledge of electrical/electronic devices and sensors which can be integrated into a mount compression tester
LEARNING ACTIVITY MOUNT COMPRESSION TESTER DEVELOPMENT PROJECT: TESTING AND TROUBLESHOOTING OF ELECTRICAL/ELECTRONIC AND SENSING DEVICES KPT2
TIME ALLOCATION
STATEMENT OF PURPOSE
OBJECTIVES
ASSESSMENT
Module K Student Guide
2004 NJCATE
30
Performance of all tasks and answering all questions listed in this learning activity.
Intermech Ltd. is considering the integration of electronics and sensors into the design of the new mount compression tester, which will be developed in Learning Activity KPT3. Most of the electronic and control devices that can be integrated into the mount compresssion tester are described in this learning activity and in Module H. In addition, this learning activity describes the sensors that can be integrated into the compression tester and focuses on the troubleshooting of electrical/electronic devices.
ELECTRICAL/ELECTRONIC DEVICES AND SENSORS Displacement Transducers Displacement is defined as the distance between the position and a reference point. Displacement can be linear or rotary. The linear variable differential transformer (LVDT) can be used to measure linear displacement. It is shown in Figure KPT2-1.
I n p u tS h a f t
S e c o n d a r y 1 P r im a r y
S e c o n d a r y 2
C O R E
Figure KPT2-1. Linear Variable Differential Transformer (LVDT)
It consists of a primary, two secondaries, and a movable core. The primary is excited by an AC source. When the core is in its center location, the amplitude of the voltage induced into one secondary will be the same as the voltage induced into the other secondary. The secondaries are connected so as to cancel out the equal voltages, and so the output voltage will be zero (when the displacement equals zero). Figure KPT2-2 shows what happens to the output voltage as the core is moved to points A and B. The magnitude of the output voltage is a linear function of the core position and the phase of the output is determined by the side of the zero or null position on which the core is located.
SITUATION
BACKGROUND
Module K Student Guide
2004 NJCATE
31
The excitation frequency for an LVDT varies according to its design and the application. If the LVDT has to accurately track rapidly changing displacement, the higher frequencies are better. Typical values of excitation frequency range from 50 Hz to 30 kHz. The magnitude of the voltage applied to the primary is usually about 10V.
Core at A Core at 0 Core at B
Output Voltage
PositionA 0 B
Figure KPT2-2. Output Voltages as a Function of Core Displacement
Figure KPT2-3 shows a rotary variable differential transformer (RVDT) which measures angular displacement up to 90. This range of angular measurement may be extended with gearing.
Module K Student Guide
2004 NJCATE
32
PrimaryWinding
Secondary1
Secondary2
DifferentialVoltage
Out
Core
InputShaft
Figure KPT2-3. Rotary Variable Differential Transformer (RVDT)
Operational Amplifiers
An electronic circuit, called an amplifier, is used to enlarge a relatively small signal at the input and produce a larger signal at the output. Operational amplifiers are high-gain amplifiers usually powered by a dual supply. Dual power supply allows operational amplifiers to amplify signals near ground potential. It also makes it possible for the output of operational amplifiers to swing above and below ground potential. An operational amplifier is shown in Figure KPT2-4.
In ve r t in gInp u t
N o n -Inv e r t ing
In p u t
+ V
-VD iffe re n t ia lIn p u t
A m p lifie r
In te rm e d ia teV o lta g e
A m p lifie r
O u tp u tA m p lifie r
O u tp u t
Figure KPT2-4. Operational Amplifier
Module K Student Guide
2004 NJCATE
33
The output of an operational amplifier is usually single-ended. The first stage in an operational amplifier is an operational differential amplifier circuit. It has two inputs. One of the inputs is in phase with the output and is called the non-inverting input. It is marked plus (+). The other input is out of phase with the output. It is called the inverting input and is marked minus (-).
The second stage in an operational amplifier is called an intermediate voltage amplifier. It follows the differential amplifier stage to provide high gain. The third stage consists of an output amplifier that provides a low output impedance so that the operational amplifier can drive most loads. Figure KPT2-5 shows a widely used operational amplifier package called a dual-in-line package (DIP). The dual-in-line package shown in Figure KPT2-5 houses two 741 operational amplifiers.
1
2
3
4
5
6
7
14
13
12
11
10
9
8
-In A
+In A
Offset Null A
V-
Offset Null B
+In B
-In B
Offset Null A
V+ A
Out A
NC
Out B
V+ B
Offset Null B
-+
+
-
A
B
Figure KPT2-5. Dual-In-Line Package (DIP)
This package uses a separate V+ pin for each operational amplifier. Both pins must be energized when both amplifiers are used. Operational amplifiers are extensively used because they approach ideal amplifiers, especially for DC and low-frequency signals. The ideal amplifier has an infinite input impedance so that it can be connected to any signal source with no loading. An operational amplifier such as the 741 approaches the ideal with an input impedance of 6M. Another characteristic of an ideal amplifier is infinite gain. Operational amplifiers usually provide gains exceeding 100dB at low frequencies. An ideal amplifier has zero output impedance and is capable of driving any load. Operational amplifiers such as the 741 can provide at least 5mA to a 2000 load. An ideal amplifier has infinite bandwidth, which means it can amplify any signal frequency. Here, the operational amplifiers are at a disadvantage. The useful gain provided by an
Module K Student Guide
2004 NJCATE
34
operational amplifier usually extends only into the tens of kHz range. Some of the common applications of an operational amplifier are shown in Figures KPT2-6 to KPT2-9.
-
+
Vin
R2
R1
Vout
Vout = Vin R2R1
R3
Figure KPT2-6.
-
+VinVout
Vout =Vin
Figure KPT2-7.
-
+Vin
R2
Vout
Vout =Vin R1 +R2R1
R1
Module K Student Guide
2004 NJCATE
35
Figure KPT2-8.
-
+
Vin, 1
R2
Vout
Vout = Vin,2 Vin,1( )R2R1R4
Vin, 2
R1
R3R1 = R3
R2 = R4
Figure KPT2-9. TROUBLESHOOTING PROCESS Troubleshooting can be described as a logical system of investigation for determining the correct cause of breakdown in the shortest possible time and with the least likelihood of error. Breakdown is a term used to indicate any machine condition that is considered to be less than satisfactory according to the factors listed below:
performance downtime service life efficiency safety environmental impact cost
Whenever a machine fails to meet the criteria of satisfactory operation, the process of troubleshooting must be employed to determine why. When confronted with a problem, technicians must make sure that they:
have an adequate knowledge and understanding of the machine needing troubleshooting use common sense and a step-by-step approach draw on their own experience and that of others when a need arises
Module K Student Guide
2004 NJCATE
36
To troubleshoot a problem quickly and effectively, it is necessary that all relevant information be available. The information needed for troubleshooting falls into two categories. The first one comprises background information, which includes information regarding the function, design characteristics, and maintenance instructions of the machine.
The second category of information comprises operational data, including the conditions of operation at the time of breakdown. Therefore, it is important for a technician who is troubleshooting the problem to be aware of the potential sources of such data. The sources of background information include manufacturers information, maintenance history, systems drawings, process drawings and troubleshooting charts. The sources of operational data are operating records, observers reports, test readings, condition monitoring equipment, and metallurgical analysis.
The process of troubleshooting consists of a series of basic steps that apply to fault location for all types of machinery. They are summarized in Table KPT2-1 below.
Table KPT2-1. Troubleshooting Process
STEP DESCRIPTION
1. Problem Analysis The first step involves gathering information about the fault so that the problem can be defined as accurately as possible.
2. Preliminary Inspection
Once the problem has been defined, a more detailed inspection of the equipment can be conducted.
3. Fault Zone Location If the fault has not been located by this time, the equipment should be mentally divided into functional zones that can be checked for operation. Fault zone location involves checking inputs and outputs.
4. Zone Investigation Once a fault has been traced to a particular zone, a thorough examination should be initiated. The more components that can be eliminated as functioning correctly, the simpler it becomes to find the component that is functioning improperly.
5. Finding the Cause The objective of a troubleshooting procedure is not to simply locate the fault but also to find out its cause. The cause can be categorized according to the manner in which a failure occurs. The following types of failures are possible:
a. wear out failures b. misuse failures c. inherent weakness failures
6. Replacement/Repair The decision whether to repair or replace a faulty device depends on the organizations maintenance policies and the downtime involved.
7. Performance Checks Once the repair of the faulty device/machine is made, it is important to check its performance to make sure that the fault has been eliminated. Tests should be conducted to ensure that the machine/device is functioning properly.
Module K Student Guide
2004 NJCATE
37
TROUBLESHOOTING OF ELECTRICAL/ELECTRONIC DEVICES Due to an extremely wide variety of electrical/electronic devices and systems used in industry, it is not possible to cover the troubleshooting procedures for every electrical/electronic device. Therefore, the material covered in this section of Module K is limited to the general principles for troubleshooting an electrical/electronic device. Because the integration of electronics into the mount compression tester would include operational amplifiers, a general discussion of their troubleshooting is included.
Observation of Symptoms Troubleshooting of an electrical/electronic system starts with an observation of the symptoms. A technician should check all control settings, external connections, and power to the system before opening it up. Once the technician confirms that there are no obvious external reasons for the system to malfunction, then the system is powered down. In an industrial situation, the usual procedure is to lock off the faulty systems and tag them to inform others that maintenance is in progress.
Visual Inspection After opening up the faulty system, it is visually inspected for problems such as leaking capacitors, broken wires, burned components, foreign substances, cracks in the circuit boards, components that are improperly held in their sockets, circuit boards that are improperly held in their connectors, dirt, loose connectors, and leaking batteries. Sometimes it is found that the faulty equipment is loaded with dirt and dust. Washing the circuit boards after removing them from the system is recommended in such a situation. The manufacturers specifications must be checked before proceeding any further. Some manufacturers specify the use of a solution of 90% ethyl alcohol and 10% water for washing the circuit boards. If the circuit board has corrosive materials on it, a solution of water and soda bicarbonate may be used to wash the circuit board. The circuit boards should be thoroughly rinsed with deionized water and must be dried before they are installed back in the systems.
Troubleshooting of an amplifier should be started with a detailed visual inspection. Sockets, connectors, and cables must be checked. Devices in sockets should be checked because they can turn loose due to vibration of any kind. Any device that looks suspicious should be reseated.
Supply Voltage Check If everything looks good during visual inspection, the supply voltages should be checked. A complete supply voltage check may include an oscilloscope test. After the supply voltage has been checked, trouble symptoms must be considered. The possible symptoms include no output at all, weak output, unstable amplifier, distorted output, or output signal noise. If the amplifier is part of a system with motors, or with hydraulic or pneumatic actuators, care must be taken so that a disturbance of an electrical device does not result in an undesired mechanical disturbance. Manufacturers specifications must be consulted when servicing such systems.
Module K Student Guide
2004 NJCATE
38
1. Compute the dB power gain for an amplifier with an input signal of 5mW and an output signal of 25W.
2. Determine the dB voltage gain of an amplifier with an input signal of 0.25V peak-to-peak
and an output signal of 10V peak-to-peak. 3. Which operational amplifier input is in phase with the output, and how is it marked on a
schematic? 4. What is the input impedance of an ideal amplifier? Why? 5. What is the output impedance of an ideal amplifier? Why? 6. Use Figure KPT2-6 to calculate the voltage gain of an inverting amplifier if R1 = 1k and R2
= 200 k. What is the input impedance? 7. What is an LVDT used for?
1k potentiometer Resistors: 18 k (1), 10 k (2), 2 k (1) Capacitors: 0.47F (2) Power Supplies: 15V (2) 741 Operational Amplifier (1) DMM (digital multimeter) Two diodes Standard LVDT (An appropriate LVDT for this activity is model LMT-711P33,
manufactured by G. L. Collins Corporation, Long Beach, CA. The specifications for this model include an input voltage of 5 8 8 Vrms, a frequency range of 2kHz to 10 kHz, a null voltage value of less than 50 mVrms, a non-linearity value of 0.5% of full range, and a sensitivity value of 0.465 mV/V/0.001 inch. Other LVDT models from this company include LMT-711P36, LMT-711P35 and LMT-711P34.)
Function generator (AC voltage source) Mounting devices Wire
REVIEW QUESTIONS
FACILITIES & EQUIPMENT
Module K Student Guide
2004 NJCATE
39
Testing an LVDT
PrimaryWinding
Secondary1
Secondary2
Core
R1
R2
+
-
-
+
A
B
Figure KPT2-10. LVDT Circuit for Task #1
Step Result 1. Install the LVDT into an appropriate
mounting device. 1. You have seated the LVDT onto a mounting
device. 2. Attach the primary leads to the given AC
voltage source as shown in Figure KPT2-10. 2. You have connected primary leads to the
given AC voltage source.
3. Attach the secondary leads, S1 and S2, to the phase canceling circuit shown in Figure KPT2-10.
3. You have connected the secondary leads of the LVDT as shown in Figure KPT2-10.
4. Center the core of the LVDT. 4. You have centered the core of the LVDT. 5. Apply the AC voltage to the primary leads. 5. You have applied the AC voltage to the
primary leads. 6. Measure the output of each phase for a zero
voltage condition. 6. The output of each phase is measured for a
zero condition. 7. Move the LVDT through its entire range of
motion in each direction, in ten equal steps, recording output voltages for each phase at every position.
7. The output voltages of each phase are recorded while the LVDT is moved through its entire range of motion. Voltages are recorded at ten, equally-spaced locations.
8. Note the values of each phase compared to each other.
8. You have noted the values of each phase in comparison with each other.
TASK #1
Module K Student Guide
2004 NJCATE
40
9. Interpolate and calibrate the voltages for the linear distance traveled by the LVDT.
9. You have interpolated and calibrated the voltages.
10. Remove power from the circuit. 10. You have removed the power from the circuit.
11. Disassemble the circuit. 11. The circuit is disassembled.
1. Using the data collected in Task #1, draw a graph showing output voltage values corresponding to the LVDT core positions.
2. Explain how the circuit in Figure KPT2-10 works.
Using an Operational Amplifier as a Voltage Amplifier
-
+
1k
741
10k
18k 10k
2k
0.47F
0.47F
+15V
-15V
+
-
Figure KPT2-11. Voltage Amplifier Circuit
REVIEW QUESTIONS
TASK #2
Module K Student Guide
2004 NJCATE
41
Step Result 1. Set up the circuit shown in Figure KPT2-11. 1. You have set up the circuit illustrated in
Figure KPT2-11. 2. For the various DC input voltages listed
below, measure the DC output voltages and record them. Each DC input voltage listed below is obtained by adjusting the potentiometer in Figure KPT2-11.
DC Input Voltages (V): 0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.8, 1.0
2. After adjusting the potentiometer in Figure KPT2-11 to obtain the given DC input voltages, you have measured and recorded the corresponding DC output voltages.
Module K Student Guide
2004 NJCATE
42
Project-Embedded Stand-Alone
9 hours
To design and fabricate the mechanical/pneumatic portion of the automated tensile test device.
Design mount tester frame Fabricate components Assemble frame and install air cylinder Connect pneumatic system Test device
Your instructor will assess you on the following:
Adherence to design requirements in the constructed device Responses to review questions
LEARNING ACTIVITY MOUNT COMPRESSION TESTER DEVELOPMENT PROJECT: MECHANICAL DESIGN AND FABRICATION KPT3
TIME ALLOCATION
STATEMENT OF PURPOSE
OBJECTIVES
ASSESSMENT
Module K Student Guide
2004 NJCATE
43
The blade twist machine must have elastomer isolators installed on its base to reduce the transmission of vibration from the machine to the floor on which it is mounted. The proper selection of the elastomer for the isolation mount requires the use of a tensile test machine. Your company currently employs the tensile test machine to measure the compression characteristics of samples of material. Your team assignment is to automate this purely mechanical tensile test machine to facilitate the selection of the isolation mount elastomer.
The current machine uses a simple, mechanical worm, screw-spring arrangement to compress a sample in incremental steps (see Figure KPT3-1 below). The specimen to be tested is held between two plates that can slide on four rods. The rods are attached to end plates that do not move. A crank turns a worm screw which pushes on the first floating plate (specimen plate). The displacement of the specimen plate relative to the spring plate is measured with a scale. This measurement is used to calculate the strain on the specimen. The deflection of the spring (the relative displacement of the spring plate and right end plate) gives a measurement of the force on the specimen, which can be used to calculate the stress.
crankframe rods
worm screw specimen
left end plate
specimen plate
springspring plate
right end plate
Figure KPT3-1. Current Compression Tester
The compression tester is very difficult to maintain, and is slow and inaccurate. Your team is assigned to apply electromechanical devices to automatically:
1. compress the sample 2. measure the force (stress) on the sample 3. measure the compression (strain) on the sample
Activity KPT2 introduced one of the sensing devices involved in the mechanical tester, a linear variable differential transformer or LVDT. Learning Activity KPT2 also involved
SITUATION
Module K Student Guide
2004 NJCATE
44
troubleshooting, maintenance and calibration of the compression tester that you will build. This activity (KPT3) involves the mechanical aspects of the design and development of the new compression tester.
The new compression tester will use a pneumatic cylinder to push the sample to a certain displacement. The pressure on the cylinder will be controlled by an electromechanical device, an electropneumatic regulator, to compress the sample to a certain length. The sample will be held between two plates. The cylinder will be attached to the plate fixture at one end of the sample. The other end of the sample will be pressed against a fixed end plate.
The pressure required in the cylinder will be the force required to compress the sample divided by the area of the piston in the cylinder. The maximum force can be calculated from the change in the length of the sample when it is compressed. The change in length divided by the original, unstressed length gives the strain associated with the compression.
= xx0
(KPT3-1)
where
= strain (inches/inches) x = change in the length of the sample (inches)
x0 = initial uncompressed length of the sample (inches)
The stress in the sample is the force on the sample divided by the cross-sectional area of the sample:
= FA
(KPT3-2)
where
= stress (pounds per square inch) F = force on the sample (pounds force)
BACKGROUND
Module K Student Guide
2004 NJCATE
45
A = cross-sectional area of the sample (inches squared)
If we ignore the change in the cross-sectional area of the sample as it is being strained, the ratio of the stress to the strain (for small strains which do not permanently deform the material) is a quantity known as the modulus of elasticity, E, of the material.
E = (KPT3-3)
The modulus of elasticity, E, has the units of pounds per square inch. To calculate the force for any displacement, we can then combine these equations to get
F = AxEx0
(KPT3-4)
or
E = FA
x0x
(KPT3-5)
The compression tester can thus be used to estimate the modulus of elasticity.
The force exerted by the cylinder times the displacement in the direction of the force gives a measure of the work performed by the cylinder.
W = Fx (KPT3-6)
where
W = work performed (foot-pounds or inch-pounds)
x = displacement in the direction of the force (feet or inches)
F = force exerted (pounds force)
The elastomer mount develops a force proportional to the displacement
F = kx (KPT3-7) where
Module K Student Guide
2004 NJCATE
46
k = spring constant (pounds per inch)
x = displacement of the mount (inches)
So the work the cylinder does on the elastomer is given by combining Equations KPT3-6 and KPT3-7 as
W = kx2 (KPT3-8)
The power generated by the cylinder into the elastomer is given by
P = Fv (KPT3-9)
where
v = velocity of the cylinder (feet per second)
P = power (horsepower or foot-pounds per second)
In terms of displacements and velocity,
P = kxv (KPT3-10)
In terms of the pressure in the cylinder, the force developed by the cylinder is
F= PPAP (KPT3-11)
where
AP = area of the piston in the cylinder (inches squared or feet squared)
PP = pressure in the cylinder (pounds per square inch)
We will also explore the pneumatic circuit in terms of the effect on the air of compression and flow. Bernoullis Law states that, in the absence of losses, including heat transfer and friction,
Module K Student Guide
2004 NJCATE
47
and with no work done on or by the fluid, a fluid will flow with the following sum of terms constant:
constantzg
Vg
P =++2
2
(KPT3-12)
where
P = static pressure, as measured by a pressure probe out of the flow (pounds per square inch)
= density of the fluid (slugs per foot cubed) g = gravitational acceleration (feet per second per second)
V = average velocity of the fluid (feet per second)
z = elevation above some arbitrary datum (feet)
This constant is known as Bernoullis constant. Boyles Law is another relationship governing the air, which involves the properties: pressure, temperature, and density. If the air is considered an ideal gas, that is, if the temperature is high enough and the pressure low enough (room temperature and atmospheric pressure, for instance) the following law holds:
P = RT (KPT3-13)
where
P = pressure (pounds per square inch)
= density (slugs per foot cubed) R = gas constant for that gas (BTUs per pound per degree Rankine) T = absolute temperature (degrees Rankine)
Module K Student Guide
2004 NJCATE
48
Lastly, a thermodynamic system, with a constant quantity of mass in the system, will have the following energy relationships as it changes from a state 1 to a state 2, if the potential energy and kinetic energy of the mass do not change appreciably:
1Q2 1W2 = U2 U1( ) (KPT3-14)
where
1Q2 = heat transfer taking place during the transition (BTUs converted to foot-pounds)
1W2 = work transfer taking place during the transition (foot-pounds)
(U2 U1) = change in internal energy of the system (foot-pounds)
The internal energy of an ideal gas is related to the temperature through
U2 U1 = mcv T2 T1( ) (KPT3-15)
where
m = mass of the gas (slugs)
cv = constant volume specific heat of the gas (which can be taken to be constant over a broad range of selected temperatures for most materials, and has the units of BTUs per slug per degree Rankine)
(T2 T1) = change in temperature of the gas (degrees Rankine)
In this learning activity, you will electronically take readings of compression and the resultant force at that compression when the device is completed. In addition, you will estimate the modulus of elasticity of the specimen material, and will calculate the power input and work done by the cylinder on the specimen. An exercise will also explore the effect of flow and pressure changes on the gas.
The pneumatic cylinder will be attached to supply air pressure. An electropneumatic regulator will be inserted in the circuit to maintain a specified pressure to the cylinder. A schematic of your system will be as shown in Figure KPT3-2.
Module K Student Guide
2004 NJCATE
49
Filter/Lubricator
Supply Air
ElectropneumaticRegulator
Air Cylinder
Frame
Specimen
DisplacementProbe
Load Cell
Bleed Valve
Overpressure Valve
PressureGauge
Supply Valve
Figure KPT3-2. New Compression Tester
The new compression tester is mechanically similar to the old tester, but instead, the crank and worm screw have been replaced by an air cylinder, and the spring has been replaced by a load cell. The supply air is filtered and lubricated, and the regulator tracks its pressure. The regulator controls the output air pressure to the cylinder, which exerts a force on the specimen.
The specimen compresses (displaces) an amount proportional to the force applied to it by the testing machine. A displacement probe measures the linear motion of the interface between the elastomer and the cylinder and the load cell measures the force on the specimen. Both the force on the specimen and its displacement will be used to estimate the modulus of elasticity of the elastomer.
Review Module H.
You will build a mechanical device that will have pinch points. In addition, the pneumatic system can generate high pressures. A loose connection or ruptured tube can cause injury. Wear safety goggles at all times when pressure is applied to the system, and avoid pinch points by keeping your hands away from the compression tester at all times when pressure is applied.
PREPARATION
SAFETY ISSUES
Module K Student Guide
2004 NJCATE
50
You will also be fabricating components in your machine shop. Always use standard shop safety practices for metalworking.
Air compressor, piston type, single stage, rated at 3.5 cfm (cubic feet per minute, free flow), maximum pressure 100 psig, such as Gast Manufacturing (Benton Harbor, Michigan) model 4H (or shop air supply capable of 3.5 cfm and 100 psi)
Machine shop equipment including, at a minimum, a band-saw, a drill press, drill bits, and a tap and die set
Single-acting air cylinder, such as ControlAir (Amherst, NH) S-4-L, effective area 4 sq. in, 1.8 in stroke
Electropneumatic regulator, such as ControlAir Type 500X (3-100 psig) Pneumatic overpressure valve, such as Flow Safe (Orchard Park, NY) F84M/F85M Micro
Safety Relief (15 to 6600 psig)
Pneumatic bleed valve, such as Pneumadyne (Plymouth, MN) # PBV-4 with an operating pressure range of 0-150 psi
Load cell, compact-type, 250 pound capacity, such as Entran Devices (Fairfield, NJ) ELA-B2 Pneumatic pressure gauge, standard type, such as Wika Instrument Corporation
(Lawrenceville, Georgia) Model 113.13
Linear variable differential transformer (LVDT) as specified in Learning Activity KPT2 Fasteners Metal stock (for machining)
-- T6061 aluminum plate, -inch thickness, or appropriate dimension based on design -- steel rods, -inch diameter or appropriate dimension based on design
Air tubing Elastomer specimens, in cylinder form (instructor specified)
Design the Frame
FACILITIES & EQUIPMENT
TASK #1
Module K Student Guide
2004 NJCATE
51
Step Result 1. Measure and record the uncompressed
specimen height. 1. You have measured and recorded the
uncompressed specimen height. 2. Measure and record the minimum air
cylinder height. 2. You have measured and recorded the
minimum air cylinder height. 3. Determine the load cell and LVDT mounting
requirements (height, mounting holes, diameter).
3. The machine dimensional specifications are listed.
4. Sketch the frame. The frame should be designed to have four rods of an appropriate diameter at the corners of two thick steel plates. The cylinder will be mounted on one plate. A plate attached to the piston rod will compress the specimen. A second plate will interface between the specimen and the load cell. The frame will consist of:
a. specimen end plate
b. cylinder end plate
c. plate connection rods (4)
d. rod/plate fasteners (nuts and lock washers)
e. cylinder mounting fasteners
f. cylinder rod-to-specimen plate
g. cylinder rod-to-specimen plate fasteners
4. You have sketched a frame layout.
5. Using mechanical drafting tools, draw the detail views and assembly view of the frame and attachment plates. Check for tolerances and fit with OEM parts (the air cylinder, load cell and displacement probe).
5. The frame design is complete.
1. What functions do the floating plates serve? 2. For what calculation will the uncompressed specimen height be used? 3. What function does the load cell serve? 4. Why are there four connecting rods?
REVIEW QUESTIONS
Module K Student Guide
2004 NJCATE
52
Fabricate and Assemble Components of the Mount Compression Tester Frame
Step Result 1. Select stock from aluminum plate of
appropriate dimensions and steel rods of appropriate dimensions.
1. Machine stock materials are selected.
2. Set up machines for fabrication. 2. You have prepared the machine shop equipment for fabrication.
3. Fabricate all device parts. 3. You have fabricated the device parts. 4. You are now ready to assemble the mount
tester frame.
Insert the floating plates, connect the rods to the end plates, connect the cylinder to the end plate, and connect the specimen plate to the cylinder.
Upon inspection, you may need to make some adjustments. Begin by checking that the rods are tightly held in the end plates. Ensure that the end plates are parallel to each other AND perpendicular to the rods. Also, the floating plate should slide with very little resistance along the connecting rods.
4. The frame is completely assembled and inspected.
1. Why must the plates be parallel and the rods perpendicular to the plates? 2. What would be the effect of poor fit, i.e., high friction between the rods and floating plate?
TASK #2
REVIEW QUESTIONS
Module K Student Guide
2004 NJCATE
53
Assemble and Test the Complete Mount Compression Tester
Step Result 1. Gather system components, consisting of:
a. air tubing b. electropneumatic regulator (or manual
regulator) c. cylinder/frame assembly d. air tubing fittings e. bleed valve f. pressure gauge g. overpressure valve h. load cell i. linear variable differential transformer
1. System components are gathered and laid out.
2. Assemble the components according to Figure KPT3-2 and insert an elastomer specimen between the floating plate and the load cell plate.
Adjust the connecting rod positions until the cylinder in its retracted position just touches the specimen.
2. You have assembled the testing device and pneumatic system.
3. Turn on the compressor and VERY SLOWLY increase pressure (or open valve to air supply VERY SLOWLY). Watch the cylinder end plate (floating plate) as the pressure is increased. The cylinder will compress the specimen. When the cylinder has extended approximately one-half inch, stop increasing the pressure.
Note: The cylinder may move RAPIDLY. Be careful to SLOWLY increase pressure!
WARNING!!!! Do not place hands in or otherwise handle the tester during this step. The cylinder can crush your hands or fingers!!!
3. The cylinder is extended and the specimen compressed approximately one-half inch.
TASK #3
Module K Student Guide
2004 NJCATE
54
4. Close the valve to the air supply or turn off the compressor.
4. The air supply is disconnected.
5. Bleed the air pressure in the circuit with the relief valve.
5. The system is depressurized.
6. Notice that the cylinder has returned to the original position, in which the specimen is unloaded.
6. The specimen is unloaded, and the system depressurized.
1. List the functions of the following components:
a. air tubing b. electropneumatic regulator (or manual regulator) c. cylinder/frame assembly d. air tubing fittings e. bleed valve f. pressure gauge g. overpressure valve h. load cell i. linear variable differential transformer
2. Why is the air pressure bled off at the end?
Measure Mount Parameters
Step Result 1. Connect the electropneumatic regulator