Embed Size (px)
Citation preview

MECHANISMMECHANISM
LINKAGESLINKAGES

MECHANISM ELEMENTMECHANISM ELEMENT Machines can be loosely defined as a device which receives energy and uses it Machines can be loosely defined as a device which receives energy and uses it
to do a particular kind of work.to do a particular kind of work. The teory of machines comprises the study o relative motion between parts of The teory of machines comprises the study o relative motion between parts of
the machine and forces which act on these parts due to constrained motion.the machine and forces which act on these parts due to constrained motion. Machines and mechanisms are distinguished from mere structures due to the Machines and mechanisms are distinguished from mere structures due to the
movements of their parts in relation to one another by magnitudes.movements of their parts in relation to one another by magnitudes. Only the geometric characteristics that affect the motion is consider, therefore Only the geometric characteristics that affect the motion is consider, therefore
the first family of elements of the mechanism that will be consider are different the first family of elements of the mechanism that will be consider are different forms of a rigid body.forms of a rigid body.
A mechanism element will be defined as the geometrical form by which two A mechanism element will be defined as the geometrical form by which two parts of a mechanism are joined together so that the relative motion between parts of a mechanism are joined together so that the relative motion between these two parts is consistent.these two parts is consistent.
Part of a machine which has motion telative to any other part is termed as link Part of a machine which has motion telative to any other part is termed as link or an element. It is possible that each link consists of several parts connected to or an element. It is possible that each link consists of several parts connected to each other but having no relative motion between them.each other but having no relative motion between them.
Two link which are connected together in such a wqy that their relative motion Two link which are connected together in such a wqy that their relative motion is completely constrained forms a kinematic pair.is completely constrained forms a kinematic pair.
A kinematic pair may be fully constrained or complete. A kinematic pair may be fully constrained or complete. Since rigid body has six degrees of freedom for general spatial motion and Since rigid body has six degrees of freedom for general spatial motion and
three degrees of freedom for planar motion, threfore the mechanism joints can three degrees of freedom for planar motion, threfore the mechanism joints can be described as:be described as:

Revolute joint (R) : allows relative rotation of the two parts about a point, one Revolute joint (R) : allows relative rotation of the two parts about a point, one degree of freedom, and imposes five constrains. Typical revolute joints are degree of freedom, and imposes five constrains. Typical revolute joints are pins and hinges.pins and hinges.
Cylindrical joint (C) : only rotation about its axis and translation along the Cylindrical joint (C) : only rotation about its axis and translation along the axis are possible; allow two degrees of freedom, and imposes four constrains axis are possible; allow two degrees of freedom, and imposes four constrains on the motion. on the motion.
Helix joint (H) : only rotation about its axis and translation along the axis are Helix joint (H) : only rotation about its axis and translation along the axis are possible; only one degrees of freedom, and imposes five constrains on the possible; only one degrees of freedom, and imposes five constrains on the motion. Typical helix joints are power skrew, skrew joint and helical joint.motion. Typical helix joints are power skrew, skrew joint and helical joint.
Spherical joint (S) : only three rotations about three axes are possible; allow Spherical joint (S) : only three rotations about three axes are possible; allow three degrees of freedom, and imposes three constrains on the motion. A three degrees of freedom, and imposes three constrains on the motion. A typical is ball joint.typical is ball joint.
Prismatic joint (P) : allows only rectilinear motion; allow one degree of Prismatic joint (P) : allows only rectilinear motion; allow one degree of freedom, and imposes two constrains in plane motion, five constrains in space freedom, and imposes two constrains in plane motion, five constrains in space motion. A typical prismatic joint is a slider.motion. A typical prismatic joint is a slider.
Link (L) : rigid body; hasLink (L) : rigid body; has three degrees of freedom if it is confined to move on a plane (planar link), three degrees of freedom if it is confined to move on a plane (planar link),
two translations and one rotation; crank and connecting rod of a piston two translations and one rotation; crank and connecting rod of a piston engine.engine.
six degrees of freedom if it has general spatial motion (planar link) , three six degrees of freedom if it has general spatial motion (planar link) , three translations and three rotation; robot arm.translations and three rotation; robot arm.
Lower pairs are kinematic pair in which the two elements have surface Lower pairs are kinematic pair in which the two elements have surface contact and when in motion one surface moves relati to the other.contact and when in motion one surface moves relati to the other.
Higher pairs will have line or point contact such a cam and follower, and a Higher pairs will have line or point contact such a cam and follower, and a pair of gears in mesh.pair of gears in mesh.

Mobility of MechanismMobility of MechanismA kinematic chain is called a mechanism if one link is fixed.
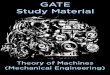
Pertimbangkan rajah di bawah, biasanya satu penyambung(link) akan ditetapkan, yang mana menggurangkan tiga darjah kebebasan. Oleh sebab setiap penyambung mempunyai enam darjah kebebasan(degree of freedom) dan setiap sendi revolut(revolute joint) mengalihkan lima darjah kebebasan, maka bilangan darjah kebebasan mekanisma tersebut adalah diberikan secara umumnya sebagai
M = 6 ( n - 1 ) – 5m (persamaan Gruebler)M = 6 ( n - 1 ) – 5m (persamaan Gruebler)
dimana n = bilangan penyambung
m = bilangan sendi revolut
Untuk mekanisma satah (planar mekanism) MMplanarplanar = 3 ( n – 1 ) – 2m = 3 ( n – 1 ) – 2m
r2
a r1
r3
c
b

MMplanarplanar = 3 ( n – 1 ) – 2m = 3 ( n – 1 ) – 2m
= 3 ( 3 -1 ) – 2(3)
= 0
Oleh sebab mekanisma ini tidak boleh bergerak maka ianya adalah satu struktur.
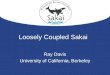
r2
a r1
r3
d
b
r4
c
Untuk rajah dibawah; mobiliti mekanisma adalah
Mplanar = 3 ( n – 1 ) – 2mMplanar = 3 ( n – 1 ) – 2m = 3 ( 4 -1 ) – 2(4)
= 1
Mekanisma hanya boleh bergerak secara putaran shaja.

SAMBUNGAN EMPAT-BAR (FOUR-BAR LINKAGE)SAMBUNGAN EMPAT-BAR (FOUR-BAR LINKAGE)
Linkage are often used in machines to achieve;
Change of reciprocating motion to rotary motion, and the inverse
Change of a constant speed rotary motion to one of non-constant speed
Chane of reciprocating motion to another such motion with different characteristics.
One link of the linkage the input link is connected with a prime mover that provide the power.
Another link, output link, is connected with a part that provides the useful function of of the linkage.
At least one link, a base link, is fixed in space(usually on the machine frame).
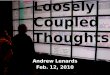
For a four-bar linkage, input usually is the rotation of the crank(link r2) and output the rotation of the follower(link r4).
Link r3 is the coupler while link r1 is the base link.
In order that one link of the four-bar linkage can make full revolution Grashof’s law state that
length teintermedia of links other two the q and p
length shortes s
lengthlongest l where
qpsl

If the shortest link is attached to the base link, we obtained the If the shortest link is attached to the base link, we obtained the crank and rocker mechanism. The crank executes a full rotation crank and rocker mechanism. The crank executes a full rotation while the rocker oscillates only between two limits.while the rocker oscillates only between two limits.
If the shortest link is the base link, we obtained the drag-link or If the shortest link is the base link, we obtained the drag-link or double-crank mechanism. The crank and the follower both double-crank mechanism. The crank and the follower both execute full rotations.execute full rotations.
If the opposite to the shortest link is the base link, we obtained If the opposite to the shortest link is the base link, we obtained the double rocker mechanism. The crank and the follower both the double rocker mechanism. The crank and the follower both oscillates only between two limits.oscillates only between two limits.
r2
a r1
r3
d
b
r4
c
2 4
The first problem in linkage analysis is to find the geometric configuration for differen locations of the input link, the output angle 4 for different values of the input angle 2 if the lengths of the links are known.
The geometric closure for the vector polygon is
r1 + r2 + r3 + r4 = 0

2/1
2212
22
1
4
24
223
43
4
23
224
1
22
221
4
23
24221
24422
2
3
4221
2
3
4422
32
32
3
44223
3
42213
443322
4433221
cos2
2arccos
2arccos
2arccos
then,identities tric trigonomeangle half using
coscossinsin
1coscossinsin
1cossinidentity theusing
sinsinsin
coscoscos
0sinsinsin
0coscoscos
rrrrS
Sr
rSrwhere
Sr
rSr
Sr
rSr
rrrrrr
r
rrr
r
rr
r
rr
r
rrr
rrr
rrrr
Dimana r1=base link length
r2=crank length
r3=coupler length
r4=follower length
2=input angle
3=coupler angle
4=output angle
S= auxiliary distance
= auxiliary angle

r2
a r1
r3
d
b
r4
c
2 4
EX. A four-bar linkage has link length of r1=2.5cm, r2=1.65cm, r3=2.1cm, r4=0.75cm. At the starting position the input angle is 600. Find the output angle and the coupler angle.
Penyelesaian
2.5 + 0.75 < 2.1 + 1.65
3.25 < 3.75
S=(2.52 + 1.652 – 2(2.5)(1.65)cos 600)1/2
=2.202cm
= 1800 – arccos [(2.52 + 2.202 – 1.652)/(2x2.5x2.202) + arccos [(0.752 + 2.2022 -2.12) /(2x0.75x2.202)
4 = 1800-40.540+119.880 = 139.460 + 119.880
arccos [(2.12 -2.2022 +0.752)/(2x0.75x2.202)] = +87.90
3 = 4 – 139.460 + 119.880 – 87.90 = 51.560 + 119.880