-
7/23/2019 Mechanics and Control in Robotics
1/569
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
2/569
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
3/569
)
Jjse{iKo
1o
.$\g:
."foQ
Grl'tno
,*
ffc
Aor;
,.Jtf.l;"
o}
li
Ur',\.i,.
*f.i
*
otff.ils
-.L
\3l.;tii,l
L-9.
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
4/569
Introduction
to Robotics
Mechanics and
Control
(Second Edition)
John
J. Craig
Addison-Wesley,
1989
.+1"
ill)Liitl'at-,,t
9"
.4.i
G;t;'o
oKiilc
$lu2'>
J}'-{i
'4lK,.
3---5ot? .-cJ'ir
g)F-t
ojU
c6;;tJL
* 4;
L;l;il
tj-;"t^-.,.'.u\1J
|t,g
ce-rr--:
,*
olK-;jl.,r"l"
..lbt-:.jl
'r*,3-
\fAO:fr
Vb
iooo: tfJL-i
JU-Jfqooo
lt.6,
?q
J*"
ful;",q
:;v,-e
r
?q
..:*,1
LtU," i-t''
ISBN 964-6379-29-X
12f-tfvq-Yq-X
.it-i
Craig,
fohn. J.
-\ loo
r.tia rci-f
;i:.o
o\3.:.itr'.b\r+
--.*l-\rcr*
i \i rg.f.ri.
J*,--;
\
-
7/23/2019 Mechanics and Control in Robotics
5/569
A)
oriI
o+:-
\
\
f
\2
Y\
Y\
Y\
YV
rr
fo
r\
fr
Y7
7Y
?Y
e)l
,>*)l
*Ul
,.."{
9JtI"
c.,;.Jlt
.r
-
L-?
^
u*..tt;l*4*,
LlJli
'^td
,t
,gj:;'K.Z,a,
.;JVrKi:*
{.Jir
\
&--j \- \
-'"t
uSlS,
,.st"rrtr
J.J:
.SJli
f
-
\
6rljf)Lr
f-
\
,r5.*L"i
g;t{lJr..l
t
14
i
Y
a..li-
\-Y
h-rtrh
),t+-;r4.,t+t(,
:tgi,.-; Y-Y
-&-t
,--/4i
+
Ln3'.r$
;t
\;*-;
srlr.,-i;
,t{IK
f-Y
,166t$-+
r
,l+Lrt
,tdh:;l
rterfu^r f-Y
Llrr+
i.-)E
0- Y
"5
'l
+
I
nbL-t
't&
?-Y
f[,--u
s;t^dJrL
V-
Y
6;+
u,iti
i.r .rr
,rt *JA
A-Y
rbT
6tArl.ry
,,[.l";
1-f
,Jl.-,t
.,.
crUi-),
\.
-Y
,at,
,rd;lS,
g[nlt?
.SJl.r,-, f
+.;L \-f
L.1.,
-;*;
Y-r
VV
VV
VV
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
6/569
A\
Ar
c\\
10
\7
\"
t
\\Y
\\Y
\YO
\YO
\YO
\TY
\rf
\F"
\TY
If0
\OP
\04
\04
\AT
\tq
\t1
\21
\VT
\VP
\Ar
\AY
\AA
\t\
\tf
\1V
hl.,
Jl--;l
-\-;
f-f
L+hl
+
t+ata3
JLdl
6 11
rl:-2 a
f-f
,ot
,rStS,.
,sto.u
.SJt^+ 0-r
A16,
g;L;i
2,j-d.
g;L;i
.g;;l.sl25G[;i
7-Y
,P; :,,
9:
&L'.::,,
,t+Jti
V-f
slsLl
,rtj.[
t
,sl+-rrt.6a
A-f
sc*175r l
1-f
GQI*,
c.,tl--)L
\"- "
,at
.r$lS"
.sla-r;tl
4ub
.iJt-.-,
f
a..tir
\-f
,r:r
r-t
J*
Y-f
n
1
? .:JL
-r);^L
uSJts,
,,s511
61;j2;
ctrljft[ f-f
u-,JlA
J-'b
.Jrb.,t
.s-*
J-. ,
f-f
6laL-.1u,-
{
"},--tr
,t-}
jl
cs-*
J-' ,
0-f
,,t.i.;
.5'-
rt
*b
tp
t*'
,slt
-e-\
,F
'ia
?-f
,at
,rs,;K.
.-Etol
irrb.tnl^.=-;l
.r-ttJL
V-f
:rllt:-l
(J;h-r?.r[+t
A-f
/t
.-(;t5.,
,-rt"rt:
cr[
SOLVD
Llr;r,-;;l ,rtc-l
t-f
,sy-i,rl$5,tjr
\"-f
jt*t^..
c,th--)L
\
\-f
.,5aih-l
1rblp.l
kryW:f[
0
a,.li,
\
-0
;L;
;t-
,s;ri-r
iL(,
slr
,s.rljfr*
Y-O
,-J*
f
t--*l
GLst
t
;Lt
t>cr*
f-0
g'l*-3li
,--c- i.rl*-r:
-Q;tL
f -A
crlr:,'
GW
8)o
0-0
-&-t
kl.,
+
&.t;l
c,.c-
aicblu
,5"&
?-A
Li*tlj
Y-0
c"S6tCL
A-0
,"L
,_$t5.
tst"ri ;r
f;b-l
ut"ri
t-0
si
i:r.,,
h*-f
lj
\
.
-0
,h
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
7/569
\tr
Y"t
Y. t
Y\"
r\Y
Y
\V
Y\1
rYr
Yrf
YYA
Yr"
Yr0
rrA
Yf"
YT\
Y6A
Y00
YOP
YOV
rYF
YYA
rA\
rAr
YAr
YA0
Yrr
Ylr
YTF
YTV
l'"
l'
",$l-l
sb-rr*
s
W-
ar6,
;l.s
\ \-6
jt,
,15.,;15..,
g[arib
.dpQr
f
a..tir
\-P
vJ-
p...-
,-lL:
Y-?
ilt
ei-i
Y-?
,L;l
iJ:L
-Ui
iJ:L
f
-?
-Arl-
ui
d$,rS"L.,-t
d,t-t^".
o-?
d-:
Jf-
,"
U;t^aJrL
s
6tl$ u;tlrJrL
?-7
{*i
.ts#ti-r
u;laalrL;l
;M
Y-?
,nt
"$lt
tstt'r
,,fuQr
U;tadJrU,
JL;L
h-7
,rSrtS,
cstr-rrtr
uS-tt-)
gtralrl..
brtT
c^..,)a
I
j$^t
')a
\-?
ar6t
c;t-oi
;r
ptS.
cstlr;
,rS"rli-r
1-5;balrh.
irll
c^-.,)dr
\
"
-P
dp*
g,ilr;l
&J\\-2
.,S.,q)
6iLal
\
Y-P
cttt-t^,.
c.,tl'-)L
\
f-2
.,*
4i
e..li.
\
-Y
-.-
$; 3
,J=.-;
trtur
,rl ;tl-)t
Y-V
;l*L
6[-ai
al+::,'
f-Y
.rr5t
6Vi
sWa
f-V
,-116,
,s6_*
.,...[,a
&)[t-i
0-V
ts
-
S
L\
csll
f
fu
.rt
,.-.-
s);
?-Y
; -r,,
Ga-1a.l.r;
r ;
ti
r*
ryt
V-V
,ri,ti-r
J.u;l
orlc-l
\
-*
,sj.f-h
A-V
\*t
)l
qG
u;[+i..- Ls]-f]
t-V
,at
,rS,jlS"
s:;
fjJtfu
,f*
A
cr -r,,
;l
oli
t*lfcrt=Lc
L-1,
t
fr
):l
,#Lr.-
6+J:i,
f-A
615
6L,bi
alehL.
ui5
15t6Jt',
f-A
;i
(_r
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
8/569
r.A
r\\
r\r
rY.
rY\
rrr
rrr
rrr
YY?
rfr
rrv
rrl
r0.
r0r
r0F
rt\
rtl
rPl
rv.
rv0
rv0
rYV
rAr
rA0
rt.
r10
f.6
F.0
1"7
1.."
?
&.r
r
x-l;
6a;i
ut^.;L
0-A
u;lilr6
cWy
7-h
,P
Jgr-td
:
rfu
Y-A
;t^L
,".-
A-A
ti
U*
t-A
,aU
ptS,
s[a.ut?
,rb
$rS
1
a,.ti- \-1
(4+i)
"ul.,'--.
s
4
tlv
J-J
Y-'\
1:r
i>.,r:
,li
6L+;
.
,
f-'\
p)
1"J)
s['.
=
'
J,"S
f-1
#5
i;b
F
0-1
.*,
,*i.r-
J.;S
?-\
;t
;-,
I
gi:
Y-1
eir)
{*.jrtti
)
LE
r-t|:
J}
A-1
t{:;
J-"t
.5.-
JFI
,.sjLJ-
t-t
,p
c,t:r.r
.5"-
;-r:5$5;L;L
\'-t
,rt,
,rS;15,
rsb./\
&-*
Jt:t\
"
+.-li,
\-\'
;b -,P),F*15lc-:'Y-\"
Lt)f
Ji>45:se
r+
JF
tJlC
''
:
f-
\'
,"t,
"$tS,
,-st^:,ilr
JFf
-
\'
,rLs
drE-)L
0-
\'
6btl
,p
st+ r,,
J;5
,st
I
'
"
P-
\
"
iiy.U
cE-rl*1,
JJ^,-
V- \.
,;5:
;L.a:;...
t 'P
l;:561+;
"=-"
A-\'
'j=h
Jr=51-
\
"
,lt,
.r$tS,
g[al :r.U,
Jt
t\
\
ar,ti,
\-
\ \
jE_f
;tJ^c
J5
L;':r
cst+trr,r
sttS
Y- \ \
G?
t):
{i
;t=Ls
t'
J-J JL'l
=*rV
f-\
\
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
9/569
r\r
r\r
r\A
fYr
frr
rrr
rrf
rrv
rrr
rrr
r0\
f61
F0r
r?Y
r?Y
rvt
rAY
rAV
rAr
F1r
F10
a't
0Yl
0fv
:r-itS,
'#;
J15'al:*
F-
\ \
t'1r
fr-u:x
J.JA-\\
r*-itL
'#;
J/
,jaP-\
\
,c-f
dt-,st+ :, JF
,slf
',aV-\
\
e -r,,
6J1bU1
gt+ ;
j
le
s .,.
u \
y
a.-Li. \-\Y
; l
csa-1ulr;
iF
-
Y-
\ Y
dr
u'ttt5f-
\ Y
; :.,
rst-tu\t
l\t oU. p)
l- r: f-\
f
;rtrf,'
LSal+,Lr1; ;
a-
a
4f
15:j-l60-\
Y
; :,,
ts1_1uti
.st+t
;
t)
o;;-s
Jtrt...
t-
\
Y
J+
6:b
tsJfebr,lt5lf
;,:"u
\t'
a..-ti.
\-\f
OLP
g;t1:=.
1;;_-t dtLy-\r
Cim
't3;*-l
f-
\
f
OLP
13;t+;*-
-t5
,t't;LJ^.c
;r*Usl
f -
\
f
;hL;:;
l-121
'a-c2-a-
,slJ
dqVJ
....=1
6tr:1r.2 f
f
+ur3.1
,:.,1:4-t+
L.l:,
&t
C
turr*
t+n;
jl
cft
t
fL'
)
c*,3,*r
ulkfu-rl.i
a,.Ur;13
u-JV=sJkl
a.Lo3l5
L..ll
c*r+
C^4.A
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
10/569
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
11/569
;)L,.PJt:.irfuf
L-;,r -l-rr.,[
g;;;6 ,a.S".t:,-:9
&;l ;,
.:.S;Lyr
Lrr),\fPV
JL;* r,
'K;-U;T
jT
Jtt,
a
s
,'6l.tl.A-;
,p
063;1,
lJtS,
Lf
+
r.r5..iil:_2:
c*i.j
fr-,-
,
jW
,t3-:-L;T
U-l
,rJ;
JL
r,
.s
,*'b
orS,.j.jl:
,t-l
tr
.Soti-x
r
lolr:.,
4rr
6,,
L)
Ma\'.
"
"
s
,lu:7rT
t-1..
,slt
,stl:i
L)t
,j*
L)
MaY
"
o
.
i,
J)
6-J
)
,i::t,S;r$.u,u.+L
cf-L=i
,st+-..=-
,(.-r:.r,r1
I
,* -J
r-ti.
,sD.
,stl:T
.,>*l
br*U-;l
,sD
pl,'(,
6taatft-:
-15a1
crL)tt
.al
,i,
i-r.;.1)
,c*l
,;b;t=*r
6la:-.i
L
y"5
y.Srtr:,
.5
ta;i-;l
osli-l
,fJli
JrL;l
atS,l
.r-
b,:rl.e,.
cl-l-r).,qlor;
alty,DlSr
vlS
rlll:
r;i1
+
+V;rr;
;LI
,sla.t;lt;r.,6"
,r*-6;l
.st",;l:
."r
rhU
,I
,-fG
Ll
,o.u
trl:'
'l
.slJ.E
s,?l
'Jd
dtil
vlkl
\ g5r1u
LL,3l5
vt5rL-t.r,
,,r-Jll
.-st".;lr
t+JL
J--L
a-t:,y-l .c*l
'.uT
(r)
(>-r-;)t
7lS
ex-f,6t+_r-
t
6*ti
,;[ra,.,.ll:
.:-;ll
:.9-.1
;J.l.:[]f.rr
9
c*l
c*;j
fi-r-
L-;.s=r-t
r,
,t.tt
t-t-tJj
:ly
,Jt.f, j. L-r;#
c^fi.r,
trilr
r;t-J:L
6rtrr,
.7[5
u6sb;
utorlr.
.-,
.): $li
b4-,-
j(::-l
,il**
ojbaj,iae
,),s.
rl^
\-t'_;
'+-
oll-Ljl:
\ f Vf
ot,i.e.-l
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
12/569
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
13/569
Introduction to
Robotics: Mechanics and
Control
John
J.
Craig
Preface
to the Persian Edition
It
was
with
great
pleasure
that
I
learned
that
this text
book would
be
translated
into
the
Persian la.nguage.
The book
is now
available in
En-
glish,
Japanese,
Korean, Polish, Italian, Chinese,
and
Persian.
I hope
that
readers of the Persian la,nguage
find my
efforts
in
writing
this
book
were
worthwhile.
My
thanks
to
Prof. Ali
Meghdari
and his
students
for
this translation.
John
J.
Craig
August, 1992
California,
USA
lr r, tt
J-;S
s.#1fu
'&f
d
'it?
&ri
L_f)li,'/h;J
urJhii+
rlSu-l
.pJ
b-;rt-l
,.ld.rrp u>j
Llrli
rlr;
t
=5u-l
f-u,.tJi
S
o,ts$
s-?;1t
u-ii
)
h,d-Ub-l
,,iL-6J
,clof
,,;,li
,u1kl
,st+ .;
a
r-;
JL.r,
; J*:,-
.+Q.
,t:ul
t,
,.-,-Ut
u-l
r::t
i
l..g;t{-i)b
i\t1.5-18,
ul3xl;
3
pl:+-l.c*l
.pl;
6,,,-.li
a---.r;
U-l
,slt;t-r4:tre
6-ll$.
uk,Fu,q
I
:.9r
4td
it"
\
11
Y
,c,jl
ts,_r.l
, ;J5
o)jL_
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
14/569
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
15/569
,-dy.rhj(.;,,,
.;bh
1;Ul)13-
;l
gslo^>
i.r r,
,;[:;UIL
f
t+jl
3 8'l
u-L.-liJG
;trr.;tt
e*ttL
1t.s:Sun
otaL
b
LVj
y-l
a-a,;[;l.u;1,aLL-i;le,;U.l(,-;j
.x:-rTg
.jUU..'+,,
u-l
,r.
LVj,(*^-:,9
,ft-^,6tat
:l
,fll5
c;U-:
,.,tr).Sr ,
o.ti-,
' :.;
t
l+-
6
,g*
.iy;
r
.Snl
:,
ra::?ra
.c-l
,J
.Job
rl.*
, [-Jl 5f
s
i,:-r
t
+L:
..l5.f o:ti-l
(-p)
4;
g'0.
U
L/+;l
,r
p;
r[5.:
-2r
,x:s,r,
.c*l
c;L :,; ii:
?
b
,stQ
uc-'"t
,a-l
af
Ut ;l)r
l,:
i[;l
L-;
,.u
,,t+l
ulor5
il
,A
4;
a
ualJ,,l,-L;
t, ,.Snt
r,
'a,J/.l-,.
c-l
,,
--ls
,6
,t-1.:ylr
.5.-:y LVtl t"r-t*.5r ,tgl.l r5,tra-L.-
,l+1";tS.;l o:tj;-l
.-r-21:;
i;E;
aJ-.*,)t5r
6tac,.i-2;l
(J;r&:,
olh
+
6
lf\f
,s .+.i
il,-..tt,
L-;'(;|
,
c,tij;.jJ:;
,ql
,-u
,r-b;
JLrr
y
U-ljl
.r:
Ll,-.,.So r,
*:.f
t
6
tf
l+,
.srl
ll-i,ei*.ry-i,,r,
,,ta"l
'c':u
tV +
I.S*tr-u
;.tljcl
>rt'
$^,.c-l
'.,r.i
F.-
rft
c6et
+
+'u
U-l
.r/
F.J
,fi*,
'i*
:
xst.*6'r[:
,cSr-:
Jbl
,.,SJK.
J|-cl
,Cl
t*1
,;21dt-.
.r.9.3
,g
g*
uSJtS,
Jtrl ,-x1,
:
fr ,-ft *t,vl:5
cr-lrr
,.5=;lS.
l4i1r
U-A-I
6 :f
u.
cit_
.jJ:;.
.S-)[t
:+;
cr_.l;3
yr
p[1.,
,rcj
,c,l.iL-r
r
.Srrti
L/+;l
al+lrr
A
b
\
st+I,.-i
.c*l
1.;-5
f*:,J-5'1--b
b;-*6
f*t;lL
\rr
\Y
(., 'tcJ"ai
:,J-J'r--bt
GG-t-y
\\ b
t
(JLcr.-i
.rtrL,.lt
3
,C-l
rt:
+5'U
,
,W,,JII-,.
'*
t
*t:f
u-|.1:
,03)lr t ..rrSg
y.;
";J
k1r
jf-t-,
Jtt-.
e15
rl;15
,ss,.,JlorJc.^.,
.SJIS, tr -rr,;-+
a5cit{l,-i
.C-l oli
c.S=1- g
2.61^.,t6.D
g,-,.2Ji
u .2
o:[',."l
tt-f
.,-iS6t+Lilr:L-
6-u,
]t5,=lJ.rl
;l
,S
e*1.-15i.^r
J:l
,r-lt:J,\tAO
JL
b
\tAf
JLit, :l tt*Ll
ot3;;lrrt
,r-A-:ls
.c-l
c.\^i
,.t-,-.2-$.&-,
.rkftfu;|, u.lt.-:9
:,rib-l;r \1AA
b
\1AP
JL
orl;-
.l
JtL
d;L :+.s
e
6b.1-#
e-lt:,-t-trJ
jl
,j-;
rr.*
jl
2b;
,J1l
pl.tnt
r,
s
6la.tL,r-2lr;,1
,-
u ,--.;
JLd,ruiL-l
ot-fu.;|t.2:.c*l or-3
ly
lt
9
2cir\,
u-si
5,cSs- r
JUi:;l
,g2:--at
J*:,ftt
f;
p
s;a2,-,lS
d-t+
'Fe
sbl
olF
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
16/569
;;Jl
'-l;;16
irer
Jrl
JL
t_
.rfr6
ir3,
prtq
JL
l,
,r-t,
csD
=6
"t-i
5
,u,EJi?
,6r.U,-r
,.S-;L-,|
qsl{-tr
,'7":;lr
c*l
;;a,JtL
6t
,Sll.c*l
.-li
,,
6l+.sL
qtt
isbjf
,,5)lr
1
.r:
,;l,l.,S
I
It1
+-
,st+t',;
J
,t-
a;
u--ia.l1
u-l
st+.u
J
,J1-.c^-J
qs*
Ul
,rJ.up
SJ
oGt;y.,.+
6,
*
,J-S
L--b
.SJ[S,
Lr+
jleJtL
:l
,aQ,
\
-51..-lp#
.,t
b
r
o:L
;t,;
t
eJtL
tutl
,'b5
:l
,aQ,,rrfb-l
otJi;lrr).st:
.(it.(,
t-r4,xjlF
c^-J
(J;i
tl
,slot)
ai3
..[lorl:
,
ya.'.],-]u
o:$-."'l
,.],1ti
,
=6
t-\,;Ul5:L-,
s,-t:-S
ilrzti.,Jr
iL.r4,
l-id
4:,j 156"
rlS
,7\u
15F
3
6a
J.S,r,L.uX,
6la.c^*X
Ltl
tt,=l:f,y-l
,srlz,;tr)t l
*-i
i;
.x1b
162r-.Snt',r.,
l.G,-rn+
os
rs-&-t
tltl
rsb
Ll
,c*l or"i
V,T
.,191
oa-
t,
,s.r-
E
6t-rS
6la1lall)
ilaatu
S
tj
aLa
.r.2el,r,
eV
b
JU,
.l-
J)
,c*,-
i
lJlJ
,S:-
Ltt,:.,
J.J:
lJtS"
t,
Lny-*-,
3
6tlttl,JlL--a
.-u.it,
,u-:l:
,raKT
u:
,-r-l
t5,.:t5
u-l
\A
sl--'d
lr.i--,'r..JtL.c-l
o-ui
,|5-
J-i
\l-;l
,-t5y-l
1::
,y-A-:
-rr
t
,.r.iL
6l,r:i.r
\ Y
pr.5---1r
.:t5.r--rs
trll
Jtt-l,Jlu-,--ri,.Jrb
.flt
6lc'i.r
;tl;.tr
b
u-:6
i=S
*iye.r^
t
Ul
.li
.iL
t+,[.ai;l g;:l.u;
'*ib
u'i"':
*
,,
,ili
j
,c*l
o.t..i
aty
aJ'
,
ir-|l
,vt:J
cr-l
.r)
.tf
6tt
'*
,*+.-J..
gr-l
.,p:
UJV
3
c.*l
,+-f
oJl-,-9
.t-j.,g:l+',"tr,'
Jbt.-
,F
,S\,,,:,'
.i-
ta-
Qt;;-,
#t
U-l6\
citt
i5+,r-r,,
.i-
)S
jL.,cr-ts,rt
Jyu
;;1.;
qglla -U
q ."r
L
q,t{:l
,.x-fct'
Lt,
utts,.
csta:,i
i'JtL
1l=;:-...
aic*l
6JAll
oru-""|
2c.4g
oJi"?.r,..3-.
&sj,csbt--,.i;
il
r;*.,4t,J,ti
d,c-l
o.ul
G-/
U-\,\
Jt--i
':.*e;
l=; r,'
af
r.2lr
o,sj-*t
?--prr
6-
,,r--
.ra
.c*l il)
aL'
dL6'--.r"
,JLi
I
o[-1,.r,
?--p.c*l
oJi.,i
d:-ij
ctr
6Jt^-i,
jl
,r,
^,L-U\
:
e:J
rf- :
-2:
o.1t-i
c42-aa
3J,-rll..r
[0.]r,uLI:
osL
g;1i
6r:^il-r
["
"].r5.f
r=i;
10"]
tr'["Jcx
qlft
;l.5-.jJ;;*,
itfu;lF
-bt
t+r-;
.5t;:
qVs
a:Jl
.,:*lo.l:;
J'-
;U'i;
'lu
,JL
/
r)
..r.rt=r
,)S
,lr3
b
,al*t
?-j4
36r;l;
,?t
t-E
r[J:
o.^a
4
e
rc.*;
.rt
,s.l-il k
-;
,al-*t
b
o-u
;;;
, l
t)
a5
c*l
o.*
u;+.ufu,
cf-tull
tlr.S.,-
,JLi
,^
at-t,
-2:
,y-l
.2
0.9)r
,6
*.
,J-L
a-
l.
6lai-o.r"t
,,.(*;tS,
qltq
*i-
|t.f
tt
1.,
,P
iT
..JU"
3a-:;l:
ufufS.,storr
Jrl'*Sq-.{.5c....l,;lll
;T
{,,.(=;tS"
,sA\
u-l
J*,
t},C
,,f,-t-l..
Lj-rt.;S;rr,[5*:,rt*.,[L
t
ra:lr
d;Ti:+,1ljf
,r-LJ
q
I
,-rl"rlf
l
:l
cllcltSra;b
,or)
6t+51-2:
.5.t-t"
b
.r5.,,
|.5
l-,
U
ut*---'-
.c..ilr
-uprt
;l-2r
I
ptS,
tster;ti
or-2|-tr;
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
17/569
ct-l
t5
0.r.3
ci.,r-i,
6rljfrl.';
,+l
dtL
aS,c-l
.(ot
l
4:
t
6lr..ri,
\
Ji"i
.ri1-1,
j.*
,
.l-l
Ut+L-i
JtL
),s-Ll
i-J-
*
,.r15
.:;ly,,u.6Jrl
a-
g;Lai
.rtqgr*:a-r ,tS.
J:4j
cb,$t$+;L;[-.rt
Y
Jr.-i
,c,t'lri)
f
t--"1
cSy,r.t
,f;ti.
ur.r t)
s,-i
t\A-:,r.1lr
c-^.rlrl=-,
J; U-l
.Jrb
:
rrL
s;l
|'.:,
tlrl
+,ksJ-
y_l
J=--;
cb
.>-*,g
iL.
lli-r,
(r.i
)r
lb.rlil
.Frb;U
J.r,
(4-l.j
tt-l
ts s
;.i,l
d-'u
JrU
u(=;tt
.stori
L.r:.r
6r -r,
,f
I
I
gt$.oi;r
i.s_r;i4.1
.st^ri
a +i
jr*
cir
iJtL)
lJt+
f
b
*
.SllS,
,-+;l
6le
t-;
.:JL
g
Lii'
,r"t
.-$tS.
.st"r,i
l"-t^:.-
,J-i
r,
.r-l
tt
.f
,g
j*
I
(il
.r.l
$F
(frJ
.,s.iL-l
.t--J.g ,$
,,)13
.,S=y-tt-l
..st^rr,',
9
turt
l
.S=i-L+
d^r,.,
,O
.,[..oi.2r
,rt
,S-;tS,
15t
.i-
6?
ulr
pI
,-rt"F
r
br*
,1.
;rr*;
,sb
,?
J.oi
I
.c*l
.F
Er"t
,-J..;tS,
.-st"-tit
S.,t--l
y:
.r-Ll
iL..- .t2-u.
pL.
.4lsr,.u.
L;i
-1r
4T
,*
nll
t fL
uSJtS.
.sl"r,il.:
tSr J:6i
a,
V
,l--i
W:l.r;
a-
dr-l
,|=;
jl
,tU
u tS,
.st^r,i
,rSiti
,rl)
",rt-.
,A
,l--i
-2r
-rr
j_[r
^;r\
4i
,s.Srt;
*t
s
t-r:.l
U
+:l
+
tei.-t
y_l
:c*l
ple.i
]
6\
.:-i,g
AJJ
t-.;.
E;J
-b
ld,;r*S\*rL,13
..)rrt
r$tS,
.gtti.S,
J--JrslI1,:r,\o
e
16$-oi.2:
,uL;
J-;5,sll.t
t
Ji;r
.r-i
up
tgJJ,L'I_r)
-h
tr-r
-*
,Et v$ 6lJ.
.t_iC
dtL F*
JA
:$
*
t*-:,,
a,,_l
-;
\
"
,l-oi
yr.e
JIS
,5";-
;1.2:
.5
,t-J,s
t
f
b
Jtu
tsi
JF
r-+
I;
+j
\
\
Ji
L='..
t,
rrt.1
,rk
f
t3 ^
, ,J-;S
Gu u-l
.:-f
,g
c.fst
,y\
tsy-,;l
o.ui
llr
utrx
.:;l:
c^--ll
,$./
,rll--*l
el-l
1l
orau,,
j'-
'.
,slla\
^S
v.l(;-e'>L,
,ii
.Jrl}.l
6a-1a.Nt
e
I
ts
3
'S.EI
oj-s
*,t+ -r,
rSy1ul2.
,sLyy
6.r l)
\
Y
,L-i
-2:
.t-j.,g
t-.2,,'
,r;t>
t-st+tr:,,
tS1-1uL"
+
L1.,. S,1.-:
rl*.f
,.rijlr
q7l
JLy
;r
l.lr.L2L
t
U_-pT
$,rt_j
6a1uN, ut*...-
)
Lt
eV
,s:L
'. \l
,l^oi.2r
.'-;.e
j*,.l.::_A
; r
;t;l
JLL
r6:L
.*td
Jl"
lrr+Jl5
,di
jV
,it,
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
18/569
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
19/569
I
do$"0
A;:oj
\
-
\
.r,
.tW[
t
er
c,LJ
t+lr, I
1r,t
,-i^r,r,-tao-2e:
I
,;';-
;rs*l;l
g]
,g-1-V1'l
i-p
.tt
,*i;
g9ll,o,15:
y-l
af ;.*t,l
-h
+
.c*l
atJ
J12-a
J:*
,sW:t
.up
gll1l
or$-.-"1
.r.i[ +,,,=..r. E:^r
u,t{"
rL :;l
l ,&t
}-L;:
t>Lc t1yo*.
u[--""=*' ra
q.l-:
c;ti
:,r
t
t'
r,r"tK:*,
;tl;,r,+15)>L..
\tt"
br.2:
a5
U.fT
S
,s-S-t
rlK
+te
;*-
;r-'-,l-1,,l,t+-;rl;S;
i/-1.[\]
c*l
+lr
tt-l;,
I,t-L;l
g;tur;1,
)Sv.
c^-l.u
,c-l
,.lJo,,|.;;j"
;l;l;laq
,( \- \
JS-:)
c*l
ai
ui^6
\
14.
br
lel,rLCL
a*,_G,-2r .(jt
:rrb
s,
+
Jl
,*
lt
rr
.y-|.\l
if:t
;.1,^
*,-st+t
:r
1l
o:1,'-*,1
,o.t..-i1l+l
15k;*ui.1,
,*
,ll
..rt+ J,
aJc*l
J)1,,d
U-
+t
.rid
J6.,*+
t#or+,
irr_l
ag-l
J-bu*
)Su.
.ir sli
,6xl'
s:;-.a-2r
,,,[5J
]
7
s
JL
r"
1t
tu]d-.a
r[;
..:j:
CU-,
^S.ql$e
orL
iu.rt"r6-2r
"-lcl
,p
gt+t::,,
;l
o;2r"1
,rL
ii
',slor6ft4l
\tA.
b:
tr
6,
c"Jb
i/-l
Y-\
Jtfu
.r-*,g o:h-l ,-r::*l
u,i.-t-j
,c-l
6rL ^:il
t+|,r,
^b:+6;6*i,+
J
,,,^iti;
,: "
JE:l
,t+JL
;l
c.Jlr"
xL'
.st+ r,
,qrr>L,
\ 11.
irr
.2:
6
8,g
,A,,_b,
,li
,-l''
.tt
tl:\
;r$rj_-L...$rc/
'e
-b:le
Ji-21:
iV;*
c^ira,
,:U;r
r.;L
.,,-tar5
tr
ivlia 6laJ^ ,p
iJ
xalr-.2[ orLi;-l
tt-f
"#
rrLr,
,;16,.,t
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
20/569
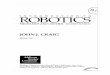
500
J'
-.:--\
-\
400
a
-J'
J,
J
300
J.
\
;t
zoo
v
100
83 84 85 86
87
88 89 90 91
92
ut)l=- JL
e):
;rd..
-r
Jl;,
,s$,,i.1:
5111.1 t,
\-
\
Jfu
o=-L
il
*ly
: ,
Jti:;l
(c,.-t-
;l
c.Jly
Vl
gl'L::
U.r6..:r-
"ttsJl
s-l6*:r'
lr*u.
qtS
&t
u.t5n-st
'cstslJ
c,tJi;b;r.
'J".lFll
;br.
;u^r
J-:
-
7/23/2019 Mechanics and Control in Robotics
21/569
r
+rj
;_*,1
,A'fu.
'P,st+t
:,
6la
6
r;,r)-a.-\:Sri;
.r-J,t
rS+L
t+l
a5
v.-lb
A
r-
tl-
*
cf
itf-uSr:l:-
.l
JJ.,e J5;ta-.r
,c-l
eiJJ6.,(J':Lo:il
c*
r
LgUt/
\1V"
.rl:
-ul5,l'
treL
tLtt,tlrT.-st+t,:,
ct
^".1.:-1
y-;i*
Ll
,.tL.up
6$b.
L;-s-
,L?t>
c,trl;l
Jf-
U_r+
J/
:
.StlS,
,,
b
5r a-..1i ,.-t:f
y-l
.r-rg
d-:r,,
rrl-....>'Wt
;r-;trl
&-l-
lVlit
JSv..',Jt*.raL,
ptst,
-r|.;
t ,P
,-st+ :,
sn 4
,t-ic/ o-t-r f-
\
Jifu
tr
a+T
r.L;
Ct+
t(;t
.Jt3,f
.4,b
.iu-o
; l't
.r,,(NC)
sr&
J.J
,sblt:t15[C'=.'L
&i
JL
.;l,,,,l
,sl.2
;tl*I
,-J"ti
,sl4*:
Jt
.t*Wi
6r,-t,^.1.
dJ".
jlp
tr,ot-(;*r
r:
ct-l
c,rt
;
.rr
$l:i
(p
; -u
.i-
&r
;l':*-t
,$
,slt+,Et
,t'_F_rt-,
Jtrl
f
till
(c4U
;sjr-'la'ill iLt'
c^rd
,J.li
ut
o,a1s
u-V
JKft+il
,51,
*.5s,t6at(:-,
;l
6l'53
/il.,t.5.rl6la,-[
Jrt-.
,.r15
tt-l
tt
ilJ
eh.
JtL *.
.,x;,g
,eJr
l*'=;L
lL
s
,P; :r
Jj
t+i,-l.1.r,r r
iri^a
t
).r).td
16a,.1t,+.[.,1
1510'.iL
..t.i
J"bri
tgrJ
reJ
cr-y
, lr
r"t
,;rtt
,.st^:;tr
JA:
JJIS,
i^JU,
)
urrr
,$t
t'
6a
6;151j5
6rU-
.1
u.lr.
ut;L;t':-L
r.
,
5l
rJ;
1l:t,e
4*
pU
cs**
ilrl
'lr'
lrl
c,ly'
c *
lV;-'
6tb
'>Vt>.
;)l;;U
crs;rsJl
;lr
;l;gn-
QLy)r
t-:i
b.b
J.
I
j-
,ilAa;
J"-t
0 5
l0
15 20 25
30
35
40
45
50
55
,o.rii;:
qr.i
.jJ:;
CL
q
aLy
;5rt
tors
f- \
JSJ
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
22/569
{.Ji.. f
LrlSJr.
r)
d5,u-:;
n
P
"F
'vv2
;rr$..
G*,i-r.rL
ptS-
61;L
f
-
\
Jfu
.:,21:
: ;
)ttS
6l,L;r
c/-h3Ll,.-fuLL
cf+
.c*l.S-y5u;t^r:*.;
J
d-$
,J)G;l
,51^-"3'-,,.b*
oil
6lJ
t
ct-\li)
',\-bl).J.su.
,Jtl
u(..b-:
3
,5-;L-l
.-rt+JL
yr
[4:--:L
iJtL
6D
lr
JL,
J.5
L--b .tttir-t
dli
,.rrt
u(-ti
,sU\
o.lr
tL
s
u;1.5;5r
Je;
.r:Tct'
pl,,
vb
rslr-(r
t
t"rx
Sltyb-
t
s:trg,__r-fi|
oL-,irlr,gV,sltl",
rrJ,,
u^,i-r'
t-Ettt:-u
6\t
lt(i;.
F:
taa-L-.-
V.,lt:,
,at,g4
i-tt
,.h r.,-yJKlL+jl
#,
q,t+
y-l
6a-1+,1r1 61r,.1;lu,:6;;,--rr,5
{
s,trsTu,
.:11: o-rXcy
l,
rAl'.0
"5rt5"
.-rlait;
J;;S
r
t(itfu
Y-
\
cr-l
r.:
'-^J,
Ab-
c^-L
il
.i-
.p
s
1.tig
J-S:;L)l,t--l
,;t,o-u,-l
6l.x^1i-
-7:
..r.:
J"lF
o:l:
p*i
a.o)L
.r-br.,-[5
,s;4a
J
,ll'("
'i--a;
,al
.f"-tl:
-162'-
g;J+
1-
qglji
rr
,,1-.-l
6;+
r
ul5,
.,;:",
,.So-t,:,
.*JtL
-2r
I
-Cir.i..rti
lvltl".r".
?i6
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
23/569
d
,lt
.,(Jt(r,-sbr:l*
JF
t.f;K,
Ll
.1lrl
'",L1r,,,t-..-l
irl
.st,r,,tr-rK
L*t> 5fy
fL*ly_L
t-e,:yl:
,Ss-
Lr-i
i-
3'**y'h*t
.6;+J
jt(,
,.r.r,t
f=i
ta;,-Lt:,
tr
Le,cr-.alJ,
c,t=Lc
r)
:
Fr)c/
jtJ
t+J
cr_l
il
;tL
rJ
c*l
,iu,r-
Gb
_&_t
*
t
:l
'f-Jd
161
u'ol-t
L-
;,t----.
o6 -,
4'rl:-
,L:i.2:
f--"
JA
6;+:
utS.
,-)':--j
::b:.
n
u-l
,s;+:
,tS,
-r,
r
*
r*
.e^{.r.l
P (e
;.-J-
Jua*L
vX:V
.(+=l
7
0-\
Ji:)
.:.-lr.r1
F+l.1'-
g-r.,>l.-'J",,
otft-r
a,
r;--j
*-n.rV
r,.rlS.
utn,s r
g-.r
oL(;r
iJ;ir,
iljLl
.lFtr
,>lut*.
oK;,
j
6
t+l;l
atS-)
p...-
c;ba.-i.:-.
-o:
i
.,*;
U_
. _:;
a,
.rlai)tc
UG
,r,
1S*.
,a
6;+
trlr
p).\tly;-rtr-r:,Y
r[^oiJr.F;-..a
-&-t
*-nrh
t
-.r,rtq.i_;l
fu.rJ:a-
3
al.-:;
ggtaatS*-,
o
c*j
t#-J
;r,-l
^,.
Lg.-r"
,-,Vl-J
5
tlgr;3:.-6>
r
,.rt(,
J: j
.:-ig
c"r.,
i;E;
,aU
ljK,
,-sta-uti
f+r*.
-(tLt
*.,
&JtL
,'uT
rrrrT
5:.s\,-slor,o
dJ.h_rr
j:{
b
4r
5,>*l
6f
*
-{Jt
*
6z
Z
A
#J{
,,p,L=*r,
1,
L
f
t-.1
:
*L,,51[S.
6rr\
a
h-rrkt
c,ta-;..6t9nt3:-, 0-
\JfJ
'5r'l
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
24/569
..ri.
7
dt5.
.slt;rjliq
'--r.
rs i'.i,,
i53,.-[:-i
t&e2u, ti,6Jt^+
rtt
J5'rJ
.-t'
,rSrl5.
qgtrrl1
.SJl+--
i'JtL
y
it-l:l
.t-J.,g
(frr.,(.&,
.p
I
t-
iL;
a1
c-.;)
.s-*C
Lt-n
cS7
GU:
:
u-,r:^
u6i;
s.l;1
,J^U
,4\f-L
'^-1s+
E
s-.:.a
#*5
,*
U.-,
*l ,)->,
g-ti
c-*
^1
^S
,i1l
cXtV J*i
L
.(P-
\
JSj)
d't
g.=-i
,r-2lr
Jtil
$\
-5r+-
*
.c-l
f;;*
.-iJk
-,
'l
,r"t
,-J:tS,
,st"r;tl
i'.ltL.l:,r-Ll.1l="
:
6lali.-'
g-r;lr
cf-t+
(s-p
,s;:4a
r
,tl,
"*lt-
utL-L.,-l'r
ik"-
tlr
.1t
'dc"u
y-l
ils-
,13[
o-u.i
o:l:
,rL:L
L-51;
a-,:.S"-
.itit
]-i.i:
t]
+.c*l
,tt
,'f$tS.r
=;6ry6
a,
r*i
.rl12l
=-nr9.'
6;J4-r
,[S.
'+*6:l
c*l crrfr
,d:..-
.SJt-i,-
LsL,^ai
,,1
,stat'
6bit
:l
tU
r,5=;t5..
15ljq iK.
;-l;
-J
., ds-.-
y-l
,r.rtf
.t-t,
.*u
$li
,j:S
f
J--i
r:
ale...,
y-l
i.1 .2:
t.p5.f
-#
G$:
,aU
,rfut.(e
,star;
.lr,,lr
.$t
r.-
Cb
*
4k-
u-l
.c-t;
f+lf
-b
tt
l,
issls.iJl-:.-,
'd,-
'fJh
J'";
t>
t5
,r:L,
or-t
orlr
,nt
,;=;tS,
sr,it:
cl+
6*
,s;+:
,l(,
^iq
:5-j.
,l
utS-
t,"t
,,f";tS,
tsr;tr
;JL1s
rJl-i,g
3
tt
dS--
J-L.st-lr;
6l-a^s2,u
)rr
4-
;
r-+
g
,.5r$a-;
,))r r;
.LE,g;
,rr\l-c
tsL:l
Gr\S
sL:i
t;.,1
,C6.r;ir.
rrlr
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
25/569
V
.lt
.,$tf..
abr,i
J.J:.iJK.
,s6ri;-:l
,*E
J22et.
q
-.
;n;qe
e,
.:-i
b
jrl
v-nt
Lte
Jjt+.-
c,I:h-
t-
\
Jfu
)56.
\3?-j
,;l-L
61de,,,.
o,-l
.(+..{
V-\
JS.:)
+5+-t-,
;}rV
ork-l
,-f
ftf
,9r.3:-a-
2
>-l
2 ,rt=;t5,
rstrr;
],-c.
s2$f
s-*l
.f.9t
+
U;bdJrU,
ig
.c^-;
F
-,
-$l^+
Jtl
+ iyls.SJt-+
iJs--.
E
\tly
cft
t>3
,rrlJ
;t5.l
JrL
+ \l-f
-{l
I
4
;'t-tp{
t+TJ-
,sluh;
;
..:*l
.l-r;
\-f
i
wlf
+
t- .5'- r1,-.9
..:*l
#.-,
.i
.up
wbr^t.-JjtS-
6$\t
tstS
dL'1,,rS,-;L;,
,
J-
,r.r
le
L-
rrr:
=b
6;+
r
utL
r.
rljcr
r^t
,,S=;tS..
15tt:
d
c-l;.
t,'-x.
vlr
jl.rii
.rJ
.c-l ,.li.i
il,
qS
6l;i
;l
g1V
I
ltj,.lL- c-.r
c"tJ
Lw
,.,.(Jb-l
t-stel*
,Wr-
r
.,t5,
f
)L
.,SjlS.
,st^ritt
,;jt-l
rl.i,Ll
+,
Lt-r
JtL-,
i-rb,
d-.^.,
,,
,3)lr
UU
.FiJ]';
i
cSr
JL
r, b
tU
.,ItS.
.-Et^r;t
lr,g
,u3p
6;+
,t
,J;tS.
c::\
s:$D
,nlV
S
b
,-e-jt
.ritS.
,Ler-
J"L;
612
c-*l;a.
trL:i
t.
u[n
6':i
;l
.lq--
il
.iJ6:i e-f
l:
e-tL
.tf
;,4,:3-3,rr
o][
..tsv.r=i.-JttS-
srrtr s.li
*,.J
L
.c-:L*
u_l
u?L.(A-\
Jf-i)
c-l
;6s
.**
u_l
J.1r..:*ly-+L
ir,,b
,f*\r.t'
OJ{
LW I,
t+T
d ,,p .tUuy:. l*
6,-l
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
26/569
,jrb
ljlr:-;l
.rl.i
.l
L.
;.,lj,g
,rll
?)ar[
,es*
6;+
-r
,tS-
,s
V-
\
Jfu
.t-S
^-L*
\
;LL6t#i
,g-fl:
{
^;.s-:..)L
l,,,,2t+
ts-rryur
J
[L-L
,slr-s\titr,}
Lf.l:-l
ih ,
A-\JSJ
.>-rr-f
'
'^,
t
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
27/569
1
lt,
uSlitt5..
,rtr.r,iLr
J.J
t.SJti
.r-11:
c--.rl ,r^b,rSJtS..st^r; ;l
;615 )l:'.,1
:
AVI* csb,
J6&.Li
L
c*l
g,;),116lil,,r5;
cSr,
L:irr
r..-Ar^t
u5-;ti
gtlri
g
'lk'-..'
Ct
c,
l:-. -[
,.rb
",.$t-l
q7
jT
J
)
rS
l+,
,,,t;
15JK
Ct-
ti
,tr"-l
tslr
L).a;. ,rb.;,l
rl*
+
yb
sts.
u*l;
-9
,
s-*
jst frL.
t
,f ; ab
.drr
ablt,efl:
e-tU
o.rt:l)
Ft,i,-l
,,
g:1.:
f[,s .r
t:;.i.rlri-rt' rr:.
1+T
.{rQr
dlL
tt-r
cir
i-sr5T
J,_-r,
6t-r2r1
;l
lt
rS
c*l
j;tS-
;l
,s;3
u;la-t-:
*{re:
6p
1,,t-ljl
.,ti
t
;F JL;l
IrlU,rSJtS.
crtq.t_
rS:,-l
slr
.s-JCrlt
,-,[s t,
I
;T
lFl :
,g&
1:ls
ct+
ts.,ry
'4V
,>o-
\
,tt
".lt
;ri
,Sf ,fisb,
6b;llt5
^U:+
b
6DlS
Clj;l
g;lc.r.a-,
'ar-r-*,
t
,g,,.rrl,
;,5.- JL
I
rJi:-r5
61.ea-.;.-L
t
d-rb
$ i
iV
st-r
;lsl5
,51:-S
Cly
.;;,
Jfu
.f_J
JLrl
\J"-L
,t
,t+hl
,t.t
,rlr t
d{,c*l
,l$
6-p'".s+
r}.,i
o:J--.l
-r*
cil:
s
s;Lbi
-r"t
,r tt
,aiL
J;5
csL$uil
.r -
.:rlr
Ji
?'.iyqJr-aLy:
JtS -ol ,rL
,JAt
ufutS,
ca\
cSr
,r5-,t-r
crbalrL
;l
,:[r-
I
2h
tr-r
:#
t)
cSls|
.c*l;l-ul
LS
DI'
,r-tL
L_,[.
o
o
t]
l*.r
-rT.b
rf
; )
urlS.,.li.
c,lj*cr
(]4-/,)
.[Y]
,:-r5*
(c*J
nrrb-rl
,c*l
;i ar,1
i6^o
,ij*,
aS
6rL;
aJ
*
jr*
(\A-Y)
r.;L
.,,trdrL
IJG
,.11.*L
or_-ri
tts-oL;IrL
,tsj
6ly
jsa.st+t-+
\
Jld+J-.y
.1*_t,C
tl^:i'-
i;J
=*
6b,-,t.t-U-l.rr
U:
ljy,g
osr;15r,.
64XS
LN2g'l-,
Ut
c{a*
}t
+^t-t-l,L*rn
u:"-t-j
U
,:,r-l:l
,rlt\.c.i-r
$l:;
-r.lr
{
-rl.-l
.-;: t{.
.s-,'.l.,g
o:t
'
.l
ji6ts:,,t4i;:-r.elr,.p5-2:
l.ralrL
i/,_l
iFLrr
,f-tS
o:lr',"
1
6;+
;$
u-;;,
clt
ib-:
,st+-_r[
)l
S
i-$aL"
#Jr
\
Jl
d+J
\i
.y_tt6+
,-,.
-trh
;rlr,Jl-:i
,sDb
(ofu
L-,.)
,,st+I,+
-,l1.,/
kr,-rttt
Li:zj
,sltb
t+i
tl,g-r/
j*
t6-tK;
it-.i1tt
#-*,-st+t-+
;.,.1;l
,,:.:,
.up
orlr;Li
AT
'.,-r-{
t,4}
{
#
{B}
vnrtp-,";=
;..r
f+lF
$+-,:
..L.,
Y-Y
Jbr
r
2
u* Jr
b.tt
\'.
i;llla,
{A}
=x]-6.
t
c^*;
Sl,
{B}
--rtrh
A-y
Jtfu,
;t-l
,c-l
dj[
Jti:l
i'a
6Lby)
r>
b
O
,
X
A
,sV-Lr)
blr \.
e;l.r;lr
s
*;]
iLs>
.B P
=1Y1"
Yt"
.
t")T
^Supt'
-)r,Ap
+L*
c*l ,_,.
rlL.Ja:.r..
c*l
a.a
{B}
-3-'/a;;-;
|
"
tA??
ar
-l''0""
L"':
"
"
-or0oo
olooo
\"f".l
"/A??
olooo
dt"
I
o'oooo
t'l
"1"
I
\J
(Y\-Y)
2_;
J9:,
^;
B
P
ylry
o:-i,lr
L
ll'1
BP
-
(
Y
Y-
Y
)
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
52/569
,#,*$
utdl.ry
st4itag
ff
or/
/
oP"o^"
.{B}
tit
;sl:s:sJlxl
,-frlf
A-YJfu
f*-:
t-l
:
d,g
orlq'--'l
.l'-+
.-S-
J12"oa
{B)
';-p
;l
AP-fTBP-
(
Yr-Y)
I'i;:ll
,rS.rL*+
t
,$lrsr
,Lgtl.iil
:tAr
-
7/23/2019 Mechanics and Control in Robotics
53/569
f0
.,[,.et*"yr,t+ l,l{llljl,bJLt
.?
&*;
-rl:ra
.5--
d.f
fu :c-l
rrL
Jt-,
,,(JS.,_.;l
crl=.;
gr_l
arl:
...^,-
.:.11r.,
+,
b
v*tV
,Sf L-
,uJro
+
b it1^
cS2-
lljct
,S,J
Ef
nJ-u
q
.rr,-rt{t
L2'))
;r'-l
il
V
+r
t+-
5
,,b);t-..(,-
cJL
rr
-,,r
p
nbL-1
;)q
.c;-S
-b
.tt
nr--ir;
.2r
.J.r:6
;b
,nQ
,lt-r
il=
r{
,A
P1
jt2
Jtiil
.F&
t-Y Jfu'
.Sc
-J
.1lr
2
-1:
I
JE:;l pl+l
r-r r
jV
't-r;l')ttl
AQ
)ltrI4L-l
;-*cl
a*1..-,
l)
tUpa'
aJ.:*l
'Pt
"-t_+
jry
.J,s.
U_l J-S
oPr--oPr+nQ
dg.:tr'-.ly-j
rL;
:1
,,e-tU
J,Lt
*t13.,a6
Jti:;l
J^r
U_|
,;;j
clt
oPr=Dek)oP,
(Yr-Y)
(Y0-Y)
It
De
J,;t.c*l
Q
.rltt
cLb
I
$J.b
"
Dq(q)
-
Jtxl
(ur.-
t_
.*
.;-)b
)
1l.tl
q
;.;T
,t
,S
.r(^"
.J,-+.f-
-il
,eV
e
o:L
JL
q
;;lt,l
[\
o o
q,1
l"
\
o
q,
I
l'
.
\
;,1
(Yt-Y)
L.
o
o
\l
/:
{A}
/
//or,
^P,
/
/
/
//r'
.Ju:lFr
1-
Yjtu
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
54/569
"5Cg
,.rkllrr
r\ir.-i
Y?
7_)t:
r::..r
Q
Jd-Ji4,6ll'j'17 Qz
),Qv
,e,
,iT
r5
S
,[5*:
-1:
Jt
S
+5o.
j .c*l
ttrr6*
,-rgf
c,l=;L-.,,
(yf-y):
(1-y)
6bJrL
_1r
#,-.S"-
,,q:-7
rrlrrF
(1-Y)
il" .,r
,c15
\a-f;
(^
Psone
uh
q)
|
B
Pasa6
,f-Y
ea
j)|:;lFt*,c^..)tc
,t-
oll
.f_tj,g
o.rlL:.
(yf-f):
(t-y)
.L'.l,,,:1
d^,>{.c
dJ
(:.-..,.;
{B}
iti
i-f;..:*l
a.-icl
7
al.o*^.
o6 -,
.Sf,
-b
613.r
rL;
I
oI3
o:lr
o
P,
--
RKQ)
A
P\
(Y^-Y)
6;l-lla,
Ii
Jt
-.rt* ,
JrL
Gb:t
aJc*l
Gb:t,slJ*
aftr(0)r,6rljl:L;
ct-ltJ
alS.7l:r1
c*i S
j1a
" -+.S,-
.rJr,eu.
ll-iglr.S-G,;r-l
.-u:,r,
1el
+1r
0
2
u*
Jr
.r r,
3
6jJ*.,(\
\-Y)
il"t
,s
6.,,lKL
,)l:,
.L>:j
*>*l
j,-
;rI
qI+qJ+q
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
55/569
rv
"5.rt*+.1,t+Ll
,l+Jbt
'trJLr
r,l
lrp
cdra
,;5u.
U-*
lr 0 ;3lsl*
-sind
o
ol
cosd
.
"l
o \
"l
o o
\l
(Y1-Y)
,f*
"l-+
q
Lt-n
I
x
I
iby,y-tL
c-^-i
J
n11l;e,;t5,-21:r1.p
,r rr
.s x
qJl
-bl
f
x
f
L-
f
x
f
un-,-jL
J15^oa
ll-i,g
f
nRrl
rL;,r r
ir:-r
1.{rrUi:-l
altt'
,sb
GLs'
,r-tL
ilid
43.1
3
'J
F"F
:i*r.ry
c1,r,
i+
-o;J
,*,t
K
-u;L
'p:
rstf
Jf
l-Y
Jllr
r
tr
Jr
jtra
y-l..rl.,rt
jl
6l61lsa
lr,g.$rc/
iLJ
t
AP1
j;r;
\'-Y
JSJ'
.+/q
AP,
b
*J+.rl:-r
.C
+A
;p,l
Jt-t
a.-r: \'o
t;l.rla;2
,r-tU
l,:
c*l
)t
,r ru.
2
Jf
-1,
1""
;;l.lh
,
tarl:.,1
6
Gbtt
,r-tl
Rz(,,
_[T,
^1
X1
.c-l
,.t r,-
2
Jf
r-.rr
t'"
;;lJlo
SAPl
2lt1
\.-YJSi
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
56/569
e>.
?-ftrht
t
c*;
b
Z
Jf
o,.r:
1"" 6;l.ula, r-D oJLir,-
-.
r,rh
.S-
d
Gbst
i^:;:':X'r
$'/
j:''
Rz(Y"t")=l.rO'o
otA??
otoool
tf"-Y)
ll
L.r"ro
olooo
\1.""J
+1.-f
C-.r/c
lj
Jt-tuv.
=
l-
lt;;;l
L
";"..1
,_F
,ebi.rt*ll.rr
t\i*rt
fA
A
P1
jsr1tsl,
t
o
P,
=
Rz(Y'
t")
o
P,
(r
\-Y)
A
P1
js2
(rY-r)
I
,rht)
It
iR-St
S
+5-.r
..rulJrL
u-l-r
-btJ;l
(YV-Y):
(tr-Y)
6balrt,,
u-l
.*,g
it-L;
(YV-
Y)
'r\b
I
R
ials
ot3;T
,,'-rr1 ,:f
,-n-v
(
\ f- Y)
'&b
I
(A
R
.src/
iL.l;
-
7/23/2019 Mechanics and Control in Robotics
57/569
f
l
.r5.st+ .y
r,t+Ll,t{Jti::l'bJ,Lt
y3.?J\1
d,J--
.
c.*\
JsL.
.rsr.
$i:;\
I
i .-5r".
r
,iLr:
R'A*5r,.
d
J--
.J,Su..
q:-j
t?t
yj?r\t
..L-.-,1
Q\)r..
cit-
JUi;\
5
.R'rI-)r,.
..ul
r:\s
;15:
,'5itS,
,lrts
ib.;,r-l,L
c*i1r;l
,[5
,rS'u
r].F
arrr,)5.^.
r1,-u
'.*,t
sJ
-b
"
f-Y
JEr
r
un
Jf
a?-r:
l'"
l;l.r;h,,
brlt,,^
U-l
,.^l,lf,g.src/
itJ
L
AP1
j11
\\-Y
J.fu,
+t+.f^,
Jl;:lYe
cL -,,r
bl:
6:
Xn,sE-b-r)
bl:
\"
a;lllr,
s,ibst
Z
.+lri d-rlr
b
o
P,,
,A
P1
=
lY
t"
Y
t"
"
,"fr
c*l
6"1;
rJar,rr
f
t";l
t
Jti:;l
r
if:,
d
f
JJ-'
T_
L";:."
-
o70oo olooo
"1h?7
olooo
o
lo
o o
\7o
o
o
1"]
(rr-Y)
/'
/
/
/
APz
/
#p,
/
.c-l
o.r.l
.l+
"&
4
Jtiil
s
bb1o
\
AP,,ltt
\ \-YJKJ
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
58/569
,-{
oM;,rtr .^y
tLi?ai'
Fo
oPr
=
t.rlr.f
(r0-
Y
)
V-i,c
t
#'l
orLt-l
jJ-t
)',;',
*
T
il
oPr=ToP,
(rP-Y)
Y-Y
Jti
s;
i;.i5
15)r'
k:l
JE
,,r-l
a5rjl.'
a:--il:
o.e;
.:_1
l:
tAJiri
i..-)'
0-
Y
.5'-
Jr
i r,
sScJL
P;;5,j'o
t:b*'+,jr-a
Jti:l
;rLrr,r-.+U,
it5ti
c*J
csj .Jbl:., :r"5tJt
,fJkr,
.F1,#
j-o
f
,,Li;;lJU:t
)^Li
.Jl,r,.5
cJL
,h
-,:
4T
lt-:
,1-ilst
iy
.r ::
r
i..
Jti:l;.:L
.-JL
.e:
,"
.f-l,r/
j*
k-rt-rt.33
u:"-l
cslt
Ct'
,stlil
il';.
t
,:-1lr
,r*-tJ 4lrl
t;
gi
a-,r(^"
,l-+
Cr-l
.s ,
ia;
{1}
*
c,*;
1.,
{B }
*aL6;
fT
.c*l
*51r\t
.1,-
-n,
-;
,,.},-rn
Cr-l
.
\
t
{B}
;I-l
csot.tn
15b-|,
.5.u--.n
151,&-
qita-/l:J,:
AR
rs\r
oi-5^;.tSu.
.src/
iLJ
b {B}
;L--...
o6 -,
1rr,
iti
t
o
P"o^c
:
;cJ.u.
j*
.$)./
cd)de
A
P
,s:t
L
"
P
zF
fT
.c*l
*,K
.i-
,,- -ri
i/-l
.Y
.$rc,/
dryr4
b
o
Pr
r
tSrt
k
o
Pt
css.t
T
.c*l"\,-ri
Ft^r
.5.,-,rl
rJ
i/-l
.f
.i-
;r)lrq
slS,
-71:11
.i-
.sti.
{
rr:a
(.- -{
D
5
r{.73a1\3
r
,st".-;b
,tr.
Lt-l
jl
UU
,. -+
jl
s
u
z=
^.i
il
c,,-,u
f
fu
c
,,v:tr\,.1
r;l
.c.i-1 .r:.rp
jS^,,
6rr3;a--
c,JL.#
J-+
;;l.e
ai-l
,+t
t,,;r:.,*.r
.s-.'J.e,:lc*"|
.r3,1^t
t-
-:t*
fttr^-
a
l,
(i*
Jbl
t-)
\r
; r,
r+F
Jl
,u)rq ,,-Jd
t
t,
L
ij
;rlrr'r Jbl
,,5
.tj
'^lrlr
orlr-
.l
"1,-+;;b
jl
UG
,C;
[;']
:['ii::i]
;:Li;,
)"6
6r-;
Ll
,c*l
I
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
59/569
f
\
,.F
,l*
e
p\,
crga
,s
-
7/23/2019 Mechanics and Control in Robotics
60/569
tT
arV
rolj,l.#
r^l'rL
I
c,t'-l-,,
e-tt
il,il-r"r''ff:
r,
p+,
"i-lr
ti
rt:e+
,{C}
:
{B}
c\xtV
J
fh
c$-;
*t b
I AnEn
'i1,R"Pcone+nP"o^"]
Aq_l I I
tr\-y)
r
l-----
-i----
-----l
L'oo;
\J
.,Lrr
Jrf
isul:
6li.
t
,r-l)
;.-r31
-b
.tt,.;-l
,,rl',
{A}
*X.tkA
q
&*;
d
,
{
B}
vXtV
,{A}
1r-:*;
{a},;r-;
b
FJ
iyl:b.1,-+
cr-l
dU
"16.(c-l
AT
rlri..,::-;lr
..;*l
f
x
f
#-j,-+
;:rlr
'.-l^.
y6u-l
yll
,sb..:L
,'jl,
.4i .:*r"
"of
*-
;l;,rL ,-it :l
ali,r,iT
i:,,lr
i-t^,
,slt
S
c*l
61143r,
J-+
,r-;L
y-l-2h;L
.:J,rU-
.l
Jt-,'
;,
c*){,
n
Pnone
:
AR:l
--i
+
b
"
Pnonc
:
"nn-r-rL
+tt
,3f
'+A
,sh
F-ljd,il,,:),-sl.f-,--rL
3.r1,:.r)
,-E
rjf
JtL
a
+i
L:
l+l
.f-tT
"on
-
An'
(rY-Y)
CC
J:ai
i,.+
{B}
*-njy--;lb^Pnone
,(\Y-Y)
iJrL;l
,:1.'-...1
t
,.'-
u
(n
P"o*r)
=
"nn
o
Pnonc
*
B
P,aone
(rr-r)
*\-b
+
(rr-r)
.J.1t
*
s 3n
"
Poo^o
=
-|R
n
Pnonc
=
-f
nr
^
Paonc
(rr-Y)
L:j
tj
a.t-re+b
uo?.
ijd,(FF-Y)
r
(f
Y-Y)
,st^.h r;l
orl.L-l I
I
A*'
i,-ARr
a
Pnoncf
'or-[.t,;i t
]
uoT
-
aT-,
'L
u;.,lir)L;
"J
t
6
+S
+i
.c*l
;^^
,1,-+
.,r
iyl:'*6
cla
,t:-t-rl=*
r
,{
;l1tt
(f
O-f
1
iJrL
(
ro-
r)
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
61/569
f
f
,-F
, -*,>
,;\1c, r.r
0-Y
Jb
r
o.2.r
l'o i;l.lh
{A}
v*tl.36
r
c*;
e5.u:r,
itJ
I
{B}
v*jq
\f-Y
Jfu'
i/- rfl ...:*l
d:jt-
Jtiil
r-b
f
tf ;J+tn,
*o.-st^l-
1t,ct1$;-,b:t
Z
t.tn
Jf
.
.+t=:
, Nf
.,:*l
,4^*
ff
t-.-J.4
r-o'-;';
&+
{B}
=*.,V
Artl
_
Br
Brn
_
ar
l'
tA??
I"rd''
L"''"
-r
t\?l
-'70tA
o
/o
\
"
th?7
-
o
r0o
o
o
'o
oo
o
-"rA"o
olooo
fr"l
.1A?7
ofooo
fr"l
o
,ooo
o
trl
.1"
I
\J
(ff-Y)
o/0o
o o
lo
o o
"1[?7
olooo
o
lo
o
o
\7o
o o
t-ig
a.*,; ,(f0-T)
i.t ;l
,:ti-
.l
L
(rv-Y)
.{A}
+.-,.'{B} *nr[
\f-YJSI
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
62/569
,.F rl|'^e;
at+l:.rr
2\\.ai
f f
,L*
6lo+lstr"
V- Y
;l
':tl
.l
\
;rli,g
b
{D}
*akt
.,i
-/,
.tsrc/ jts
2 ,p:
\f-r
Jfu,
J12,.at'
C-a.J
.rJ
it"
drfk bg,o
Jr
{
,t+ -+
V;rkL
'oT
=
ir
Ar
(
r^-
r)
(rr-Y)
r
-
flr
B"r
$r
r,T .up
c*)de
tj
ut_tpt
, .t.j
iJlt
,
,'oT
jl
\):
j;,
,l_l
,Jrl:-/lri
,srt-
Xr Ar
-
Yr 3r
""r
(0.
-Y)
.J:r)s-.
J=.5;;
dl-
.S: dtd+
;l
6l^se.--
\f
-YJKJ
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
63/569
f
0
.L+
silrdrt,
,f,-.r;
iJrL
n
5
)2p..Jr-+
t d.ffu
,t$-rn
'.*l-..,s|,.;tl-irl,. r.,
6trrJrL;l
.1r
,.11,,5L,
""f
n $+
'.:S
6
uJ[-
,slt
b
(0"-Y)
tL.lr.tj
o:l.r-*"1
,r;l
4-3.
bli.-r.
b
J:*., -ri
,r,
.f:-rlr
J*j,-+
.S,-
r
.J,-+
iJrt^.
.f-
?-,
I
.r--&,
-b
,.25T
c-r.,
,-lLT*
3r
-
Yr-'
ir
Ar
"or-'
(0
\-Y)
.c*l o.ui orlr;ti;
u-&-t
rLi
c--r";l
,\0-Y
rfS-i.1r
4
i+,
f
;tQ
il-:t
,.$\J
,t12eL
haL6;
,t+Ifu
i15.r)
d
+{
-.y
src/
it:;
;t
c4-
..slo.u
.rlr
,ril;
,J:1u,
,kt-&-t
-.
r,r[43'i+.
+
-.
.1>,kt
a,
c*.i
{D}
=nj{-,\f-Y
J"fu,
t>zsFdi-t;
u-S-t
a,
l:*i
-.f,rl1a
llJSrs
."[u il:L
51;l
6li;
\ 0-
Y
JSJ
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
64/569
J-f;
D}
+s*;
{A}
,-,rt,.
,\O-Y
Jfu,r,
Oj:-j:jTt
r'^'t
c*l
,jK
,s-Je
,V
pr
r;.:",
t+t5s
3u.13;^l.r,
hr,.rt'6,;
4;
,sb
.tf
,g
c1-
t
.jJH.
,k.slrlr,rt
^it+
.fisT
c-)d,r
lr
rlQ,,sLd,.+
,-*k;
;l
0S-
J: j;r
\0-r
Jfu,
l.{g
t*l^.
lr;rT
;.,t,1:
l.ril
,.tu:L ,ratr,
,rtd.rr
;l
.ulc.,-,Lc
{C}
rrrt-rkt
Zr
-ir
ir-'
3r
Urn Urn Brn
Cl=BACI
(0r-Y)
)
(or-Y)
C
+A1.,'1TL
tli,-r,(or-Y)r
(OY-r)
t5bAf
;rl:; ri 62L.-,
tri
t+:,-l-r,
xr
=
Hr 8r
Br-,
2r
(
or-
Y)
9-l
Jt:t
t
u;gL
;b-i3Jl
t
eb,{"}
.r,rkt
Ft
t,
.5,\P-Y
Ji.fu,
tt
FT
,}-+;
+S
*t
I {S}
*rtV,3T
"1,-+
ro:r.r.r .r.r
frL
,c*l
{B}
r;t
i_t .
c^-.i
,r5jtS,
tU
-* u,
3
rf*
it^(.
J:5.,,
J"ci
{B}
1-t,
d,
c----i
,.:*l
.}.oi
$ -*
+
I
6a;L
,*,:
ds
r*;
Ex
ui*+r
utS,
,TT
.t-rrf
Lra;^*
8f
., -+
'&s+;
r-11:
.+5
+-l-.,
b
,fV
,r5jl5,
ll-i,l
,lu-;;
Jr,
t,
c-l
.ul;
r)
.rti
u-l-r:
o-rJ.,kil
qlStV
,sA6r.\
tj
+L+:-j
J.t.t-Ar
cdr
-.-,f,rh
{
+
l,
6r,
*nr[
TT =
+T-'
Bsf
ZT
(oo-
Y)
Ls;+
u,Qti
6tU.tr.&r;G"
A-Y
Ji-t,-u
c-l,:
66t**.,+-lorlr;LJ
r
x
l; 3r
,r-tl
"b:+,t+-
f
,lr*.F
jj5u
b
tU
t4l
;-;l.ll
3
,\,4
p^;:
r:t:,
t+i
.st+r*
15.J
c*l
;i
jlrr
utr*,-rL
c*l
;T
(oJ'd))
;l 1,b>.&L.r
-*
o.t
rrtr:..t
6t{.-Jit,
L;tlt:s,st+*,-y[.c-l
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
65/569
f
V
,rr*{"
4l;
i; -yr r
.,,JU,
"6
*
6)t.tt
6*
4
t .r.l.:
4,;; JL.,:1t
,5;t5"
6t
\t-
YJ'f'J
J.lj.
GVj:
cr;Ull
.uL,:.t5.-
tst+-,_;t)
r.2l:
f
\
r
6rrr
tlb
,r_tL
1l:=
i:
a5
.(srl:
-
\ L
Jej;:-rc
t
jl;S
;ly.r
b
6;;+-.5--
t_T
S t-J.e
dL
Jly
cr_l
,r
t
,r-
nttl t
6U.,[f]
ut;
t*
tr
rrtsrtf,1
6t+-Jit,
,Jh
t,,'-1,5
Jyt
,*t.d
t_
,t'
^S
6ltJ^',tf
*--*
aa7[ir:Ll
,r-tL.f..,-
ily.f
,or--utritS--
R=(Ir-S)-'(/r*^S)
(or-
Y)
e-JU
tr
6,(5 =
-l'
cr--)
.r-rh:rrL,
.r-yL ..:*l
I
x
I
i5.,-,r-;,
I7
;.1
I
3
+lcf
dd)dJ
;;;
(s',.eur
sz
); rU,
at
c.*2,c*l
\"
x
\"
'
-
ltt,
;:"
ti"l
l.
Cayley
(oY- Y
)
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
66/569
,-{
eLa;
at+.t1.rr
t\i4.ai
fA
a.-
t6;'.b:t
llj,C
f
x
l; rr
,r-tL
j.S
sy,t..u';
'L
=t'**,
(6P-Y)
'll',,tJ
.$
"r;-:-;-bL,
.*U--
,b
R
e-tt .uj
;3u1,
iJ:L.
,-,*
;ri
,sl.z.rl
u.
;rl-irl .R
irbs,
,r-tU
,-i-S
-b
t5
j-fuu
L
,,5)-
Lf_;t,
Al-;.,f
,,r_rlr
;t:;
l.x,lr:
*=[* ? 2]
(a^-
Y
)
-J
aJ
-r::-..e
,SnrV
&-
6l-y3,..
tl:
_r,
jt,r1-
y_l
,,*.r,_r Y- Y
,14
,t
&t?
,J:.e--c
t':r:{r,
b:
J::--a &-Ll
l.rrlrri
U-l
i*.,:-l
oli *j
Fr-.
-rtrt*?
,:
$lF
jll
,r--tV
,;s
t
:,Jr
tt
t)
+p
"r*
li1
-r
lvl
-\
121
-t
*.Y-"
*.2_.
Y.2-"
(01-
Y)
:l:
.r:"_L;
;-.lrl,
a-
'^1"-51
ll-i,g
)
6;Jl-.1
l
T
(v*
Jl
t".up *
U-lJ.q
.i;--15r,
f+li
l,{i-tJ
;r,_l
;l
a;;
r* j*
t
.u4
g,-l;:
.a; L
ts
-,.\ir,-l
Ul
,:j
4
,jtL+ ;)l-i,f
L
e
t
l-t'
t2n
-
6Lby:
Jti;l
,[-c
a-
6l
:l-1:
t+-f,(+-
iej
tr)b
&
t
jL;l
iLi-,.l::..c^-J
c-J)
ilt's
s,y
,Jrl.u,-*ttlLr
c-^"--E'1--.
t+Lr,
dc*l
;T
,ttf
tp-l;r;)tL:.
J,-{-.c*l
cri,i
.c*.r
jL
3R fR\
AR
3R
A-
Y-Y
JEr
r
-b
tt
r4>..1) t""
;;l-tla,
X
Jr
u-&-tj
,d>.-2) \""
;;l.tla,
2
Jr,F-
, ,
tj
ibss
s:
'"'t=32
-o70o
o
"
1477
o
lo
o
o
l"
rlrr
|"ro"'
l'r"
"'
f
::]
Rz(Y'
)
-
(r" -Y)
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
67/569
f
\
,r,.ts{e
,-*-Q
i:\tt,S,
,rJb
Jr
t+-_-rU
I
.:rll
.,1[r,L
c_*--t--
"5.JL
6;+
e$
ep;
er-t',
t:,3,1,*
rt-f*
e
jljLl
t+ r,
^Sl4I
J
ui"_t-i
.F",
,i_L;
i;U;
tsit:na
trlst
c.*1t
,
t+l
d
c^-l
,u,.J
,-iJ
-h
,,
-,,
5
,>-l
5liJ+
4i
e-rl
j1'e
lr,-;
**l
J:-.rr
JJ-t
Js..aa,
jl::
uLe,-rL
\4at
clt
ib:t
6t+-_/t
Ll.-r:a:,r,
f
t il,
..lfj:
rl-.t
el:r1
*S_.,:
s.r--i
=-e
f
tt"
,y
Ls-&+
,ilu.^..ulf
cf
I
tyS
J+;
6,L.-a:-.-r::-+
.*t-.
jl.r:1
,s;:4-
g.4-r*\
ar-:-
i
,-*-:U
jrjr.,,l,
ffuy)
rJaI
t*.6
a;1.r,.1.21
,*:61
T
.;:,rylr
)Jr
4-
tt-
t
jt";
du^,_l
:),r|
t
ir:.^
t.:$l
.ulr-
c-,-.>;
a.,,-r.L:rt5-_
r+lr-
i-*
d--f
aJ
u-l)l
dr
r-- ,or--i
.rl.6.:.4r).,,1
-up
;*u-rt=-:t+--l
t;
,.:-,U
X-Y-Z
sgJt_lg
:;-l 64
{IJ}
-gr$
6;14-
\;a:--j
ts9.Jstjl
.,
l+l
b
{B} +5
Urt--t
"+-
{A}
f}*
)
er
*-*rV
r
6
rt-;.rka;l
.r.a:
.rLr)
o
;11.r;lr,
2o
Jr
(Ql-
e
,11
t;ltl*
?o
Jr
ctr
,-l
i;lJlo
*
n
Jr
t-Jr-l
urf
{rl}
C:y
J
,*U
=*rV
jl
ct-r Jri|s,
u
,J-l;l
.t-
l
.*[
+
i^JS.r-"[,r..
c+ti X-Y-Z glil,
t
,s;4-
;r:]
u^;.*:lr.2lri
gr,_l
.t^tJ.(\v-Y
Js'i)
)s15",.,1:l ,xrSu'
rhl
;i
clo*
Jr
t+ :,
6
6.-nrf
irt
[\r""
o
olooo
"/oool
Rx(r")=
1.r.."
"1A??
-.ro""l
(p\-y)
L"r"'o
oTooo orh??)
i34
,J,drtl
,r,_l:tt+
c
_---t-
..,br:
l)
,?_l
S
ty,g
olal..i.,
['r,fV
-'tYY
'rtO-l
Rz(Y.)
Rr(f')
=
l"rO"
"zVO
-.rftl
L'r'"
o/Ao
"rAVJ
(PY-Y)
f'rrtv
-'/d"
'r'"-l
*
R*(Y")
Rz(\'"
)
=
l"rff
.rVO
-.r0"
I
l"rYO "tlY
"rAYJ
--e
s,s-7J.
,l
o:ll-
.l
,r_jU_rl
t+f;,
,'n:
-i
tSU.lt:,:rls
uA*
g,_l
1
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
68/569
,#
ut|;i,rt+Jg*y
t$to;
0o
.c-ti
6tarrr,-,
Jf
ufl
)
,6
.Jr.,l
\V-
YJifu
l[u_l
.r:-1t61
.,rLl
,1i,/
rL-tt-l J,t61,tJrrSUr;llrl:-7lri,,[[,:l1f y-l;l
.r.2lr
:.r,-26
i: .9-t
6Lr:1r.2 ,i
.rt
ltj
,:f
],s.
lti-l
tr
+tt
lr-:
;j,g
.tt'
J'a
+
ARxvz(t,
g,,o)
J:t^. iby
*-jL
;r;el
c-rdJ
x-ig
pt+l
1-..,,
*r,lt+t
clt.tr Jf
dS*,
t+b,
',)* t*
Jr
,r :'roll
'\
.i6,*
Jr JL::
yarv
.l
AR"rz(1',0,a)=
Rz@)
Rv(A)
Rxo\
=
[::
-ll
:l
l':
i
'i]
[r
;,
-;]
L
"
'
'l
l_-,0
,p)
L"
,;
,;)
(Pr-Y)
-r6q
,Jt+lrr:
u*;r; c^-b.l
.c*l . . .
.1
,sin
a t;;;-
so
rcos
a
.;,i;-
co
;i
t,
d
4J
,j-l
r.
,d
,?j
,sJ.^t
,-,rfr
l
l+1,,r,
Jl
.trlt
c-*^al
rt-.-:
(Pf-Y)
;,
&-r
t+--;t
;ttf
--,-\.Rt(") f\lr
s,Ry(p)
r,Rx(f
)
l+l
'r/.r-"li
J^'
tre
a';.;
(21-Y)rr
lcac1l
cosljs^1
-
sac1
cas13c11
so's7l
AR*rr3,0,a)
=
lror0
soslsl
I
cacl
sa-sBc1-
co.sJ
I
ttt-tl
l-''n
c|s^r
c{tc'1
J
'L*
t
t*
Jr; .1r
Pitch
'Y
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
69/569
0
\
,r.6*,{e
,}.2V
i}.;,&,
,rJtL,
k-
(f
f-Y)
iJ:b,
.:jLcf
Li^L
I
tCfrr,*,;,tail-2r
r-\.'3
clrl
i-;
^f
+5o.y
3,8
1lslt,tn
Jr,1
t;lsl+
X,q
Jr:r.71:.21-l
n
-.;t+.-u
lt+jl
tslb:s
cD.
.o
i;l.tla,
2n
Jr
,_t-;JU;l
I
Jrt'.
c,:t'X-Y-Z
6l_ly c;,,-
,F+r
l4l
L rk
u_l
byl'd-U
UU
'CJ-
\Qs-*rr)
Jk
6Lrd:L
;l
jcr-^..r,-
yrl..
rr-*
.p-.rrT
a-rr
; er
t{J
d+T.r
cs- a
rJrL 1,.-*
tll-h:-1.5r,rfr)
'r--rv
tr,srL-
bVr-v).+h
3
aJ:L
t-
u,i,-,1:,r;l:
t5a5
u ,4 Ar.i;,alrL
1
y-l_2r
.r93.Jj;lr
Jrar-
a-
AR*rt?Y,0,a)
=
?"r
r
,
Yr
Trr
(r0-Y)
il-;,rr\
J
rrr
-tn-r.
L*tlt
+t--.
t
,5rr.f
o$t-L
(Pf-Y)
L.tJ
a*l^-,cos
B
t
-?'rr
d-*;
_;l
c;$b
-5rI ,fJ
\
0
+.:l:
tr.r.2el
.*:
^.,
I
cos
p
,rvlcA
t
rrr
lrg,^,.
,-;l
c;l;b
6i,jiJ\1,
"
ili,r.cp
#
"
SGV:t.r-;.,g
.r.2.el
c-:a,
rrrlc0
a
rnlcg
c+;l
c;l;b
.5rT
uJ\1,
I
:
;-i
ol-ict
o-o)ti
,*+
0
=
Atany(-rr,,,
ffl
+
r;.,y
a
=
AtanY(rrl
lrl3
,
rrrlc0)
7
=
Atan
Y
(rrl
lcp
,
rrr
lc0)
\.c*l
6la-t:-
.1:
c.,;l;;L-
JrT
Atan
Y (A,
r)
,rT./,
at
'^kbl
Jti-r
tsl
c-i
c-)lr
FJ.h.2.:
L
Ll ,:.71r:;-;
2
,-/s,
vl9.
\
Jl
,.*t:.
da
UU
,r-l
.,-:-:lr
f+b;
-1oo
j
.
;=-;
;
-S_t Gt_*7
iliL/
l,
{B}
-,.
.;-;t+t
2s
Jr
l+l
{B}
.+5
er,.
-t,r-h-
{n}
f-J,-
v-rrf ,
6
,s.-nrf:l
.i-r:
oLr)
7
i;ltla;
*n
Jf
(fl-
r,p'ollsl^,?"
Jf
,s=-,a;;l-ulr
f
t
il ,{1}
cntj
Fr.
o;r,{
B}
S-*
oK;,
jl
cstr.
Jr ib:t},,rs.t
,-r_lt>
c52p
Jr
.,tr,
g
aS
+J
o+y
.LU.f
*sl
ts\lu
t
.,1:,
u
,j-l
b*
t.J,-r
Jr
iL::,,-,J-l
d:"1
*
o-.-?
.:.71r
f-
"-F,st+ :r
t,-rT
jtS..
d
t-Jr-r,-,12.-o
.fEe
Z-Y-)I-
*-i
"s -l_st,
,#;+-,j.,-l
U-l
,t-rLt'
{;l
*
,
,Y
,2
csr,"t:n
i-;l.r;la".1f-e:..ra:,r,
ul_t^j
),;lL-51;
jlts>-p:l
e.t
{B}
rstot:^,
\A-Y
Jifu,
,..,f:r
*
-
7/23/2019 Mechanics and Control in Robotics
71/569
6f
,rr*{e
oZ.;
i1\i
J1,,rJt ,
Z6
Ys
?o
f;R
-
fr,R. E",R
Bo"
R
(tl-Y)
.c-l eJ.-3
i
Z-Y-X.tr-:l
st-l:,
Jt-tn\,c- c*
g;t+bst
tl.f-,'l
ai
-2:
.5
+T.f
c*rde
tj
rt-t'1
{A}
du
c^.-.i
{f
}
a_t+
,s;r4-
f
R2,y,*s,
-
Rz(a)
R,(0)
ftx(r)
f."
-sd"l
lrO
'P'l
ft
. .l
=
[:
':
,]
l_,,
'
;l
["
::
;i]
(v._y)
kS
+l3'.,J"-S"--,r
t+--rL
=-e
tr....1,so
=
sin
e. tce
=
coso;ir: af
t-*,-l
lcacg
casBsl
-
sc.cl
cosBcl
*
sasTl
f
Rs,y,1s,(o,,
A,l)
=
lsac/
saspsl
*
cacl
sasBcl
-
ro"7
|
l-tB
c/s^t
c|c^t
J(V\-Y)
,54-t*
Jf
.r r,
ad
o.Ja
,Slt
6 c*l
6laa=l
\
)t
'E.i,
,.iy
'a4*
AS
+5
otf
t\t
E,}.t.JL
1s
or[:--
-*
c)a
b
ra.=;
;r1l
t:;u.
J-;
,-"-fu,.*;/-
[
c.,ti
c*l
aJ--,.iti
6t.l.7-9,^,.
Jf ib*,*
pt+l;l
,-,
o.LI
cryrrJ
.,,-t4
6fa-:c*l
.Z-Y-X
-$l
,st
lr;
\
A-
Y
JSJ
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
72/569
cl,.t-tn
Jr
'**
4;t,.r ::
&
j,,
I
f+
I
;
I
-:j::;
T:,
.Svz
*-;;$
bstsT
cryr.r
(J;
b.JrU.
y-l
r.t^.
J-
+,c-l
JrL
(Pf-Y)
lr
(Vt-Y).j+L
i:t
,slt
;tlj,a
b
Vf
-Y)
it1
,F-r
ort.ct
.c^-J
jU
,rLr,
,r-tl
;l
Z-Y-Xy'-:l
.st-h;
.r-r
-r6t
,;
,frr-
iLs:.
,y-tL
t
,lt:i
Z-Y-X
-f,-:l
,sL-lU,J:-,;T
c*:r
,tf;i,sinB+"Jl
Z-Y-Z
*:l
(Jltilt
:c*l
s;
{B}
v*rla;;l
u-&-'
J:
t
;;r's
ra'
t
"
t:
:,,1,1?rff"
oil
y,'I--,:;Y;;r*
f*:i
u-l
,sfi,t
J:
j
{n)
S-*
-.
r.rltr3
q--..;
t+ r,
u-l
;t-n
6
.45
r-.
j;
plh,l
2
r,Y
,2
Lsl^1t^-
Jr,r :r
-
i).rf,.rj.up
-*-:lL-:l:
il=-rt
,kl
.E,l Z-Y-2.{-ll
crUl
L
0t
"i-[
,,i1;
,c-l
or.i,
r.T .up
c-)4
g;3
Jrt
jbss
,r-tt
,Jl^;
e
,bb;L"
i# Jt"r
lcacPcl
-
sasT
-cacBsl
-
sacl
cosg]
f
Rs,y,s,(o,,9,^t)
-
lsacBcl
I
co.s1
-sacpsl
coc1 sosp
I
tvr-rt
|
-"/rt
slsj
c0
J
:c*l
r.uT
tj tt,if:r ,r-tl
Cpl:
I
Z-Y-Z
,L-21
6l-11;'+A
,b
c*l
g=:q
ibs:
,r_tV
ftrr
rrr
rrrl
fiRs,y,,,(o,
A,l)
=
l"rr
rrr ,rr
l
(Vr-Y)
tt
Ltt'r
?nrr
TrrJ
(Yr-r)
AtanY(f4,
+
4,,
r.rr)
Atan
I
(rs
f
sB,
rvl
sA)
Ata,n
Y (r1
f
sB,
-
rrt
I
-s0)
B_
a-
t-
It
vlr
o.2l9
.r ,P
Ulr-1r
c-,:..
,L
,>tJ
-b
tt
I
Ll ,r,-i,r,.
c-).
=h
tt
\
Jl
,p
=
\Ao/oo
\0
=
"1'
$"Syel.Cga*l-."to
1P
-l
t:,
ef+ef+e[+e[-\
(r.
-Y)
,[1;
,f
.rr
blr
Lf t
,slr-S
.h)
J
.l'l,.Li
tt12ea
bli.-r.
b
c;Jp t
U-Ug.
JtLl
.A-
lrirt I
x
\
rlrr.i-
it1:euy'-jl
u;LAr:.,f1,;bel
,-16.tf
,.-.+
rr.r+
l
alfrt+t
l,
t+l
,r1,;6a1 f
x
\
-21:r,
,f5;
+
t"r 1.
U-l
Jl
.s-;'g
dJ
_h
,,
tFg
dLtj)
0:+
,c^-l
,L_51
,56.n
fr-r.;-y.l
R,=
lf(.,ey{eye1)
lr(ers
-
y1)
'eU.r
\\;l
6las2.^.
JtL
^5,R,
bbst
,r-tL
Y(e1e1
-
r(r)
Y(.,e1'
+
eref)l
\
-
Ye
{
-
Y.l
Y(e
1e;
-
.,,.r)
I
(1\-y)
Y(eyes*erer) \
-
Y.l
- r.ll
f,F
tL:'
,r-;u
Jl
Trr
-
Ttr
c,
-
-
'
fet
?.rr
-
frr
Y
-
_
'
fet
,l\
-
,
\r
C?--
'
fet
\_
et=iy'\+rrr*rrt*rrr
rSt-ttu
Jr
\A"o
.rl,rlr.i_,J.l:
jb1o,r-tL
6Gr-r-r:
(ly-y)
ila ,
d+t.t-r
Ul
.&iJ.up
ip
c*
.
{
r,.-,,.}
tt_ltt
-;,v-il:.ulp.j t^.
rrr6,U
t
i .2r
..uiLr,
c/lr
4b,
i
cJL
u-l
,sD
(lf-Y)
.st".lq
ef
rlr
lf
;jtg
..lL
r,.rp./t
t-\,
\l
;-; -2r
o.,l.e-e
tre;.5
c--l;;y,(At-y).st++r.
++,
-rrlo.r.i
^t
:ti
S
er_1e
,b
:l d Ck ;-p
c, r.r
tr
jl
rrl.r-
,l
\
;rl-i,l
lrl+-;r+-r
t+&
-
7/23/2019 Mechanics and Control in Robotics
80/569
bbst,r-
tL,t2
2,e
t
J-i d r.T iLi
,lJl-,
cr
tr
:.r
::
:::::":',
ilt-.3,
L-
i+,
,,.g-1.jit:-lrJ::f
rrll'
-l,,.;*
&rs.r*n;.f,l
.L*.&-t
G.rf
L-
,J-1lr
I
c,lrr.r
rr
il-:q
t+r,r["33
,.):ylcrblj
S
u.\u
ttl+-,
,
"
,u_D\.rrl.r
$T
.rrlJd
'DrT/; -u
6
,J,4P'jvo'
tog)tr
,le
' "
u-t
c-lui-,
..t1,-,.
5,tJ..rl,
:
,tJ
.r:..i,t
c-:l:
;;
(s">
cs
*l
L-
aO*-1,
c*
tD
J:-;L
r-\-i
sjr,-.;,
'h,
jl
,s;J+"
,slt,lW
t,-t&
U_lJI,JLro.,:.c*l
orL
aL;l
a;lra*>l.o;^>
Cr-l
tr
i#
..u
Joli
fJer,r
-rl=*
,-
"=-
,J:.,
16{
6;+
'*j
rli
sta;lr;
,Lrr
1-Y
ya
3
ur-
q5te-1lrr1 ..rii
15LCl--i
y:
.6-ll:
-rSs-,rt(,
dt^_rl:,
.lo
,JL.oi
r;l;r
..llc,;ti,
U
,l
,4tr.1lrra
4T
lt-:,c-l
c,eLt
l-o.2b2
i/-l
,.1,-{
.#r+tr ,rtt
-o
b
t
aL;1\:r,.5:
.f-Frl;16
olti,'larlr;
(,r;-rlr")
,(:*"
:6tb,g-
&tS..2r
Lp;
c*l
gS-.
r. .
,lrr,
j:
.r-i[.
;L-S,-b{
.-e
5.0;\s\.;r..-,L_:
{
sr.\r.f,-S"-
.+-5..
-b
I I
Y \
-
Y
J"fu,
.2r
oJ-1,
orlr
lt
l;
,Jtr
lltra
^-
>{:,
.*
^*B
d)l;,
;l
J,_S"_
t
;_r.
tL.
,r,,.trlr
;L*
-{a
r
,rl,
;;lsl
,)t
j'.L-:
yl:r1
u
,}-l
.it
v2
vJ
///
.1112
c,-c-
6tr.2l:r1
Y
\
-
Y
JS,J
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
81/569
?Y
gl
g;b.1ly
upe,.,
,.?.;t+
,,;,,,-lrq .rJ\K
qsE
-r.
dt-S,-
j\
.u.;jr
ur\:.
r:
rS
s\S;-..-r
,r,L11\sr,
5r
JLr:r..
d-:a,
u,;Ll_
ia;
jsr,
.-.
f
,-I-iL
r-\.i r)F,
cit.-
JL^,
,Y \-Y
ufS;.2.r
,[.r-11:2
u-l
,f-A-bt
ay
i-"Je;l
7trjb.,V
JlUt.rL3 ...-r
,t-r
,s-lt,
s
t
j,6
'fu,t+T
jrr .t{.--
e
[.r-11:r1
,y.
L.L
,U)'q..ff
i .L..-
,bt.;.
tb,
s:+s
;t5-
Jll
,soV
yly.,r
c-I
OS^,i
r:-+
-rlrS,r,-t-1lrr4.r-2l:.l3.:bcl,t=-
);rlS
6)
t
,Jr.i
ib
Ji.rr5,-
c-l
OS-,
^S
,,g\4;tstrgJ
;l
u-ll
U
st
i-,;
I
tj
tt
:c^-lrr
f+lf
-)l
b
t
,c^t?
e
,;l.ll
2
.3)r
2b
t
-r
.tQ
i
3i
;l
S
c,-l
6rlsr;
u ;
rtry
,1lr
p-,
jT
Ul
e
U-t
.;l
E
a.5y
rlrt
/.st"jl
UG
.-ut,
a:-,:l:
,r(:-,
E
tlr;-
.c*l
"rL;
1.
.r,-l
++
6.J
aT
f*r-r
o5,;T
;.1.r,
a,
d*^i
B
N
Dl'
-
7/23/2019 Mechanics and Control in Robotics
82/569
,-{
eV;,-rkrr.ry
t\L.j
?l
.lrvr
"1,-.tr
YY-YJSJ
./ -,tt"
crtg-)'.
\"-Y
Ll
,c*l
c.:,b
Jti
"5
5"-
y
t*.t-i-2.1r ,;tful
"sQt-..
;rs
it1.
d;d>
Jt
.x-iL
,u-il:
,r*1..
,:-; ;t-t".
-t-t
,G\tr
6[nt(*t
el]-rr
t'
j-*
C+
,sl.eylil,.1-.-l'cl-2:
Ll ,c*,1
J:-.rr JU,
6t
rslt
6,L.
,j-1-
\ Jl
2l-rrr--
is{
--e
,slt
csl-:
ilj
at:u
"r-l
t,
D:,r-J.
,C
ort
-
'l
td+il
ii+.-,
(fO-Y)r
(f
t-Y).st".l+ -2: o.,r-l
o:lr
l^i.i
JS-
t'1r-.
d,t-t^.
.trdr$
tt+i-
.l-.4,g
cir-rlrr,.
f
x
f
q5L+--rL
it;
b)lt
t
n:-,
wt';l
3;lu.
1.q;,1
Jt*ut+ r,
,'Jc.
.r1lSu.
ilrlt;U
i,t-t-..
f
J,,,I,-ri
.sL+--rL
v-e
4j
t'-r31
-b
tt
tj
ut-t-l
b rlt;^
4
(4.1r.a)
op=AR
in
$n
op
(
1o- Y)
rtV
I
#R
,e-tV
b
rJ
+-*J,.rS"-r:
b
.r[:
sl.t--r[
lt:.,|
a5c*l
;T
,-ir,'
.5.,-
L_i
,--tn.rr-1
op=iR
op
(tt-Y)
.up
3i
,k
Y?
),-'r,>
J^t
Of
q;
,;l6r.e:
Jg-
a-
6,
illR.lr.2eic-ra,
?
s
u-J
J'^t
t
1.1
:-
3
$?-Y)
;rl=s
t5
itt i
e-tV
v-e1t+l
..-1,
www.mohandesyar.com
-
7/23/2019 Mechanics and Control in Robotics
83/569
?6
e.V
F,Lc
YY
2,r2.b
,j*
rY
il*
r.rr.
d,q-b-,
,[5:l.r--
,d1,;--r,
.c*l
g.a
.,|.s
.a:*l
t+,-,-;U
9
,rrtj'
,l
cful:l'rt-r.
+,
,b-,.
,j-+ ,tt.
jl
,,;,-rt
,tlt
,s4*
Jt
t
l
,f-,d
:.1
l3
c,f-L^..
.rt,F-" -
op
=AR
op=AR


























![[John J.craig] Introduction to Robotics Mechanics (BookFi.org)](https://img.pdfslide.us/doc/110x75/55cf8ebe550346703b952908/john-jcraig-introduction-to-robotics-mechanics-bookfiorg.jpg)