Embed Size (px)
Citation preview

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
Sub Module 2.11
Pressure transducers Here we discuss several pressure transducers that are grouped together, for
convenience. These are:
1. Pressure tube with bonded strain gage
2. Diaphragm/Bellows type transducer
3. Capacitance pressure transducer
The common feature of all these transducers is that the pressure to be
measured introduces a strain or movement in a mechanical element that is
measured by different techniques. The strain is measured by a) strain gage
or b) linear voltage displacement transducer (LVDT) or c) the change in
capacitance. Detailed discussion of each one of these follows.
1) Pressure tube with bonded strain gage
The principle of a pressure tube with bonded strain gage may be understood
by referring to Figure 72.
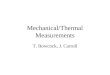
Figure 72 Pressure tube with bonded strain gage
The pressure to be measured is communicated to the inside of a tube of
suitable wall thickness one end of which is closed with a thick plate. Because
p Dummy Gauge
Active Gauge
1. Active gauge responds to hoop strain due to pressure
2. Dummy gauge helps in temperature compensation

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
the end plate is very thick it undergoes hardly any strain. The tube, however,
experiences a hoop strain due to internal pressure (indicated by the blue
arrows). A strain gage mounted on the tube wall experiences the hoop strain.
The way the strain gage works is dealt with below.
Strain gage theory: Strain gage consists of a resistance element whose resistance is a function of
its size.
Figure 73 Deformation of a wire element
Electrical resistance of a wire of Length L, area of cross section A and made
of a material of specific resistance ρ is given by
LRAρ
= (72)
Logarithmic differentiation yields
d R d d L d AR L A
ρρ
= + − (73)
Equation 73 represents the fractional change in the wire resistance due to
fractional changes in the specific resistance, the length and the area of cross
section due to an imposed deformation of the wire. The specific resistance is
a strong function of temperature but a weak function of pressure. If we
assume that the element is at a constant temperature the first term on the
A-∆A
∆L L
Original shape Changed shape

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
right hand side of Equation 73 may be dropped to get the relation
L o n g i t u d i n a l F r a c t i o n a lS t r a i n C h a n g e i n a r e a
d R d L d AR L A
= − (75)
If the wire is of circular cross section of radius r, we have 2A rπ= and hence
2
Fractional LateralChange in area Strain
dA drA r
= (76)
Recall from mechanics of solids that Poisson ratio ν for the material is defined
as the ratio of lateral strain to longitudinal strain. Hence we have
2 2dA dr dLA r L
ν= = − (77)
Combining these, Equation 75 becomes
( ) ( )1 2 1 2dR dLR L
ν ν= + = + ∈ (78)
In the above the longitudinal strain is represented by∈. An incompressible
material has Poisson ratio of 0.5. In that case the fractional change in
resistance is equal to twice the longitudinal strain. The ratio of fractional
resistance change of the wire to the longitudinal strain is called the gage
factor (GF) or sensitivity of a strain gage and is thus given by
( )1 2dR
RGF ν= = +∈
(79)
The gage factor is thus close to 2. Poisson ratio of some useful materials is
given in Table 8.

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
Table 14 Poisson ratio of some useful materials
Table 15 presents typical gage factor values with different materials. Strain gage construction details: Figure 74 shows the way a strain gage is made. The strain element is a
serpentine metal layer obtained by etching, mounted on a backing material
that may is bonded on to the surface whose strain needs to be measured.
The active direction is as indicated in the figure. When a force is applied
normal to this direction the serpentine metal layer opens up like a spring and
hence does not undergo any strain in the material (actually the response will
be something like 1% of that along the active direction). When the length of
the metal foil changes the resistance changes and the change in resistance is
the measured quantity. Connecting wires are used to connect the strain gage
to the external circuit.

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
Table 15 Typical gage materials and gage factors
Material Sensitivity (GF) Platinum (Pt 100%) 6.1 Platinum-Iridium (Pt 95%, Ir 5%) 5.1 Platinum-Tungsten (Pt 92%, W 8%) 4.0 Isoelastic (Fe 55.5%, Ni 36% Cr 8%, Mn 0.5%) * 3.6
Constantan / Advance / Copel (Ni 45%, Cu 55%) *
2.1
Nichrome V (Ni 80%, Cr 20%) * 2.1 Karma (Ni 74%, Cr 20%, Al 3%, Fe 3%) * 2.0 Armour D (Fe 70%, Cr 20%, Al 10%) * 2.0 Monel (Ni 67%, Cu 33%) * 1.9 Manganin (Cu 84%, Mn 12%, Ni 4%) * 0.47 Nickel (Ni 100%) -12.1 * Isoelastic, Constantan, Advance, Copel, Nichrome V, Karma, Armour D, Monel, and Manganin are all trade marks
Figure 74 Strain gage construction schematic (not to scale)
Connecting wires
Backing material
Etched metal foil
Strain Direction (active)

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
Figure 75 Strain gage elements as they actually appear (Visit: www.omega.com)
Strain gage elements as supplied by Omega are shown in Figure 75. By
making the element in the form of a serpentine foil the actual length of the
element is several times the length of the longer side of the element (referred
to as gage length in Figure 59). The gage length may vary from 0.2 to 100
mm. For a given strain the change in length will thus be the sum of the
changes in length of each leg of the element and hence the resistance
change will be proportionately larger. Gages with nominal resistances of
120,350,600 and 700 � are available. However 120 � gages are very
common.
Gage length

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
Example 25
A typical foil strain gage has the following specifications:
1. Material is Constantan 6 �m thick
2. Resistance 120 � ± 0.33%
3. Gage factor 2 ± 10%
Such a strain gage is bonded on to a tube made of stainless steel of
internal diameter 6 mm and wall thickness 0.3 mm. The tube is
subjected to an internal pressure of 0.1 MPa gage. The outside of the
tube is exposed to the standard atmosphere. What is the change in
resistance of the strain gage if the Young’s modulus of stainless steel is
207 GPa?
Data: Applied internal pressure is 50.1 10p MPa Pa= =
Tube internal diameter is 6 0.006ID mm m= = Tube wall thickness is 40.3 3 10t mm m−= = ×
Tube is assumed to be thin and the radius r is taken as the
mean radius given by
( ) ( )0.006 0.00030.00315
2 2ID t
r m+ +
= = =
The Young’s modulus of stainless steel is given to be
8207 2.07 10E GPa Pa= = ×
The hoop stress due to internal pressure is calculated as
5610 0.00315 1.05 10
0.0003hpr Pa Pat
σ ×= = = ×
The corresponding strain is calculated as
6
8
1.05 10 0.00512.07 10
hh E
σ ×∈ = = =
×
(For Constantan the maximum allowable elongation is 1% and the above
value is acceptable)

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
With the gage factor of 2GF = the change in resistance as a fraction of
the resistance of the strain element is
2 0.0051 0.0101hR GF
RΔ
= ∈ = × =
The change in resistance of the strain gage is thus given by
120 2 0.0051 1.02hR RGFΔ = ∈ = × × = Ω

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
Bridge circuits for use with strain gages: While discussing resistance thermometers we have already seen how a
bridge circuit may be used for making measurements (see Sub Module 2.3).
Since a strain gage is similar in its operation to an RTD it is possible to use a
similar bridge circuit for measuring the strain and hence the pressure. Lead
wire compensation is also possible by using a three wire arrangement. For
the sake of completeness some of these will be discussed again here.
The basic DC bridge circuit is shown in Figure 76. The output voltage Vo is
related to the input voltage Vs by the relation (derived using Ohm’s law)
( )( )( )
1 3 2 4
1 4 2 3o s
R R R RV V
R R R R−
=+ +
(80)
Figure 76 Basic bridge circuit and the nomenclature If all the resistances are chosen equal (equal to 120 �, for example) when the
strain gage is unstrained, the output voltage will be zero. Let us assume that
R3 is the strain gage element and all others are standard resistors. When the
strain gage is strained the resistance will change to 3 3R R+ Δ where 3 3R RΔ .
The numerator of Equation 80 then becomes 1 3R RΔ . The denominator is
approximated by ( )( ) ( )( ) 21 4 2 3 3 1 4 2 3 14R R R R R R R R R R+ + + Δ ≈ + + = since all
resistances are equal when the strain gage is unstrained. We thus see that
Equation 80 may be approximated by
Vs = supply voltage Vo + -
R1
R4
R2
R3

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
1 3 3 3
21 1 34 4 4 4o s s s s
R R R R GFV V V V VR R RΔ Δ Δ ∈
= = = = (81)
Thus the output voltage is proportional to the strain experienced by the strain
gage. For a gage with sensitivity of 2 the ratio of output voltage to input
voltage is equal to half the strain. In practice Equation 81 is rearranged to
read
4 1o
s
VV GF
∈= (82)
Since the pressure is proportional to the strain, Equation 82 also gives the
pressure within a constant factor. Note that Vo needs to be measured by the
use of a suitable voltmeter, likely a milli-voltmeter. In practice one may use an
amplifier to amplify the signal by a known factor and measure the amplified
voltage by a suitable voltmeter. Another method is to make the resistance R2
a variable resistor and null the bridge by using a controller as shown in Figure
77.
Figure 77 Null balanced bridge
The controller uses the amplified off balance voltage to drive the bridge to
balance by varying the resistor R2. The voltage Vo shown is then a measure
of the strain.
R1
R4
R2
R3
Controller
Vo
Amplifier

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
Example 26
The supply voltage in the arrangement depicted in Figure 60 is 5 V. All the
resistors are equal when the strain gage is not under load. When the strain
gage is loaded along its axis the output voltage registered is 1.13 mV. What
is the axial strain of the gage if the sensitivity is 2?
We use Equation 82 for calculating the axial strain. We have:
35 , 1.13 1.13 10 2s oV V V mV V and GF−= = = × = The axial strain is then given by
344 1 4 1.13 10 4.52 10 452
5 2o
as
V micro strainV GF
−−× ×
∈ = = = × = −×
Example 27
Consider the data given in Example 21 again. This gage is connected
in a bridge circuit with an input voltage of 9 V. What is the output
voltage in this case?
120 2 0.0101 1.02hR RGFΔ = ∈ = × × = Ω From the results in Example 21 the change is resistance has been
obtained as 3 1.02RΔ = Ω . We then have 3
3
1.02 0.0085120
RRΔ
= = . With
9sV V= we then have
3
3
1.029 0.0191 19.14 4 120o s
RV V V mVR
Δ= = × = =
×

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
Three wire gage for lead wire compensation:
Figure 78 Three wire arrangement for lead wire compensation
The connections are made as shown in Figure 78 while using a strain gage
with three leads. Let each lead have a resistance of RL as shown. Also let
'2 2 LR R R= + and '
3 3 LR R R= + . Equation 80 is recast as
( )( )( )
( )( )( )( )( )
' '1 3 2 4
' '1 4 2 3
1 3 2 4
1 4 2 3
1 3 2 4 1 4
1 4 2 3
( ) ( )2
( )2
o s
L Ls
L
Ls
L
R R R RV V
R R R R
R R R R R RVR R R R R
R R R R R R RV
R R R R R
−=
+ +
+ − +=
+ + +
− + −=
+ + +
(83)
If all the resistances are identical under no strain condition the second term in
the numerator is zero and hence the balance condition is not affected by the
lead resistance. Let 3 3R R+ Δ be the resistance in the strained condition for
the gage. Again we assume that 3 3R RΔ and, in addition, we assume
that 3 LR RΔ . With these Equation 83 may be approximated by the relation
( )( )( )
1 3 2 4 1 3 3 3
1 4 2 3 3 11
1
12 4
4 1
Lo s s s
L L
R R R R R R R R RV V V VR R R R R R RRR
R
− + Δ ⎛ ⎞Δ Δ= ≈ ≈ −⎜ ⎟+ + + ⎛ ⎞ ⎝ ⎠+⎜ ⎟
⎝ ⎠
(84)
In writing the above we have additionally assumed that the lead resistance is
small compared to the resistance of the gage. Thus Equation 81 is recast as
1
14
Lo s
RGFV VR
⎛ ⎞∈≈ −⎜ ⎟
⎝ ⎠ (85)
Vo
R3
Vs = supply voltage
R4
R1 R2 RL
RL

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
Thus the three wire arrangement provides lead wire compensation but with a
reduced effective gage factor of1
1 LRGFR
⎛ ⎞−⎜ ⎟
⎝ ⎠.
Example 28
A three wire strain gage with a lead resistance of 4LR = Ω and a gage
resistance under no strain of 120R = Ω is used to measure a strain of 0.001.
What will be the output voltage for an input voltage of 5 V if a) the lead
resistance effect is not included b) if the lead wire resistance is included?
The gage factor GF has been specified to be 1.95.
Case a
The effective gage factor in this case is the same as GF = 1.9. The output
voltage with a strain of ∈ = 0.001 is given by
31.9 105 0.00238 23.84 4o s
GFV V V mV−∈ ×
≈ = × = =
Case b
The lead resistance is given to be 4 �. The resistance of the gage is R = 120
�. Hence the effective gage factor is
41 1.9 1 1.837120
Leff
RGF GFR
⎛ ⎞ ⎛ ⎞= − = × − =⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
The corresponding output is given by
31.837 105 0.0023 23.04 4eff
o s
GFV V V mV
−∈ ×≈ = × = =

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
2) Diaphragm/Bellows type transducer:
Pressure signal is converted to a displacement in the case of
diaphragm/bellows type pressure gage. The diaphragm or bellows acts as a
spring element that undergoes a displacement under the action of the
pressure. Schematic of diaphragm and bellows elements are shown
respectively in Figure 79 (a) and (b).
(a)
(b)
Figure 79 Schematic of diaphragm and bellows type pressure gages that use
LVDT for displacement measurement
In the above figure a Linear Variable Differential Transformer (LVDT) is used
as a displacement transducer. The working principle of LVDT will be
discussed later on. In the case of the diaphragm type gage one may also use
a strain gage for measuring the strain in the diaphragm by fixing it at a
suitable position on the diaphragm (Figure 80).
P1 P2
Diaphragm
LVDT
LVDT
Bellows
P2
P1

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
Figure 80 Diaphragm gage with strain gage for Displacement measurement
In the case of the bellows transducer the relationship between the pressure
difference and the displacement is given by
( )1 2p p AK
δ−
= (86)
Here δ is the displacement of the bellows element, A is the inside area of the
bellows and K is the spring constant of the bellows element. In the case of
the diaphragm element the following formula from strength of materials is
useful:
( ) ( )2 2 2
1 2 23
3 ( )( ) 1
16p p a r
rE t
δ ν− −
= − (87)
In the above formula δ is the deflection at radius r, ‘a’ is the radius of the
diaphragm, t is its thickness, E and ν are respectively the Young’s modulus
and Poisson ratio of the material of the diaphragm. This formula assumes
that the displacement of the diaphragm is small and the deformation is much
smaller the elastic limit of the material. The perimeter of the diaphragm is
assumed to be rigidly fixed. The force is assumed to be uniformly distributed
over the surface of the diaphragm. It is seen that the maximum deflection
takes place at the center of the diaphragm
p1
Strain gage
p2 a
r

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
Figure 81 Strain gages for mounting on a diaphragm gage
(Figures from Vishay Intertechnology, Inc., Manufacturers of Diaphragm pressure gages) Terminals are provided for external connections and for compensating resistors. Different
strain gage elements of the bridge respond to radial (∈R) and tangential (∈T) strains Since the strain gage occupies a large area over the diaphragm it is
necessary to integrate the strain of the element over its extent. The
displacement given by Equation 87 is normal to the plane of the diaphragm.
Because of this displacement the diaphragm undergoes both radial as well as
circumferential strains. As indicated in Figure 81 strain gage elements
respond to both the radial as well as tangential (circumferential) strains. The
numbers represent the leads and the strain gages are connected in the form
of a full bridge. The ratio of output to input is then given by the approximate
formula (from Vishay Intertechnology, Inc., Manufacturers of Diaphragm
pressure gages)
( )( )2 21 2 3
10.75 10 /o
s
p pV a mV VV E t
ν− − ⎛ ⎞= ×⎜ ⎟⎝ ⎠
(88)
The above formula assumes that the diaphragm is perfectly rigidly held over
its perimeter. This is achieved by making the diaphragm an integral part of
the body of the pressure transducer. It is also assumed that the sensitivity of
the strain gage is 2. While measuring transient pressures it is necessary that

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
the transients do not have significant components above about 20% of the
natural frequency (fn) of the diaphragm given by the following expression.
( )2 2
0.4691n
t Efa ρ ν
=−
(89)
In the above expression ρ is the density of the material of the diaphragm in
kg/m3. The diaphragm is again assumed to be rigidly clamped along its
periphery.

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
Example 29
Steel diaphragm of 15 mm diameter is used in a pressure transducer to
measure a maximum possible pressure of 10 MPa. The transducer is
required to give an output of 3 /mV V at the maximum pressure. Use
the following data to determine the thickness of the diaphragm. Also
determine the maximum out of plane deflection of the diaphragm and
the its natural frequency.
Young’s modulus 207E GPa= Poisson ratio 0.285ν = The gage is constructed as shown in Figure 81.
From the given data we have:
3 /o
s
V mV VV
= ; 15 0.0752
a mm m= = ; ( ) 71 2 10 10p p MPa Pa− = =
We use Equation 88 to obtain the diaphragm thickness as
( )( )
( )
2 31 2
7 2 3
11
0.75 1 10 1
0.75 10 1 0.285 10 10.0752.07 10 3
0.000593 0.593
o
s
p pt a
E VV
m mm
ν− − ×=
× × − ×= × ×
×= =
The maximum out of plane deflection is obtained by putting 0r = in
Equation 87.
( ) ( )7 4 2
11 3
3 10 0.0075 1 0.2850 0.0001263 0.126
16 2.07 10 0.000593r m mmδ
× × × −= = = =
× × ×
The ratio of the maximum deflection to the diaphragm thickness is
( )0 0.000126 0.2130.000593t
δ= =
This ratio is less than 0.25 and hence is satisfactory.
The natural frequency is given by

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
( )9
2 2
0.469 0.000593 207 10 265220.0075 7830 1 0.285nf Hz× ×
= =× −
The sensor is useful below about 5 kHz Diaphragm/Bellows type gage with LVDT: As indicated earlier a diaphragm/bellows element may be used to measure
pressure by directly measuring the small displacement very accurately. This
may be done by using a Linear Variable Differential Transformer (LVDT) as
shown in Figure 63. A schematic of LVDT is shown in Figure 82.
Figure 82 Schematic of an LVDT
Figure 83 Operation of the LVDT
Secondary 1
Vo=V1-V2
Secondary 2
V1
V2 Primary
Co
re
Movement
Secondary Coil 1 Secondary Coil 2
Primary Coil Ferrite Core
SS = Support Spring
S S

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
LVDT consists of three coaxial coils with the primary coil injected with an ac
current. The coils are mounted on a ferrite core carried by a stainless steel
rod. The two secondary coils are connected in opposition as shown in Figure
83.
The stainless steel rod is restrained by springs as indicated. One end of the
rod is connected to the diaphragm/bellows element as indicated in Figure 79.
When the ferrite core is symmetrical with respect to the two secondary coils
the ac voltages induced by magnetic coupling across the two secondary
coils are equal. When the core moves to the right or the left as indicated the
magnetic coupling changes and the two coils generate different voltages and
the voltage difference is proportional to the displacement (see Figure 84).
Figure 84 Output of an LVDT excited by alternating current supply. The phase information is with respect to the phase of the supply.
Figure 85 Schematic of a typical LVDT signal conditioner
Demodulator
Demodulator
Sum
Difference
Divider Gain A
Primary Input
Output DC

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
We describe the typical LVDT circuit shown in Figure 85. The primary input
voltage is 1 – 3 V rms. Full scale secondary voltage is between 0.1 – 3 V
rms. Gain is set between 2 – 10 to increase the output voltage to ± 10 V. The
two secondary coils are connected in opposition and sum and difference
signals are obtained from the two coils, after demodulating the two voltages.
The ratio of these is taken and is output with a gain A as indicated in the
figure. The output is independent of the gain settings of the sum and
difference amplifiers as long as they have the same gain.
Table 16 Common specifications for commercially available LVDT
Input: Power input is a 3 to 15 V (rms) sine wave with a frequency
between 60 to 20,000 Hz (the two most common signals are 3 V, 2.5 kHz and 6.3 V, 60 Hz).
Stroke: Full-range stroke ranges from ±125 µm to ±75 mm Sensitivity: Sensitivity usually ranges from 0.6 to 30 mV per 25 µm
under normal excitation of 3 to 6 V. Generally, the higher the frequency the higher the sensitivity.
Nonlinearity: Inherent nonlinearity of standard units is on the order of 0.5% of full scale.
In Example 29 the diaphragm undergoes a maximum deflection of 0.126 mm
or 136 μm. As Table 16 shows we can certainly pick a suitable LVDT for this
purpose.

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
3) Capacitance diaphragm gage:
Figure 86 Capacitance pressure transducer
Figure 86 shows the schematic of a capacitance type pressure transducer.
The gap between the stretched diaphragm and the anvil (remains fixed
because of its mass) varies with applied pressure due to the small
displacement of the diaphragm. This changes the capacitance of the gap.
The theoretical basis for this is derived below.
Consider a parallel plate capacitor of plate area A cm2 and gap between
plates of x cm. Let the gap contain a medium of dielectric constant κ. The
capacitance of the parallel plate capacitor is then given in pico-Farads (1 pF =
10-12 Farad) by
0.0885 AC pFx
κ= (90)
The dielectric constants of some common materials are given in Table 17.
Table 17 Dielectric constants of some common materials
Material κ Material κ Vacuum 1 Plexiglass® 3.4 Air (1 atmosphere) 1.00059 Polyethylene 2.25 Air (10 atmospheres)
1.0548 PVC 3.18
Glasses 5 – 10 Teflon 2.1 Mica 3 – 6 Germanium 16 Mylar 3.1 Water 80.4 Neoprene 6.7 Glycerin 42.5
p
Diaphragm
Variable Gap
Anvil

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
Logarithmic differentiation of Equation 90 shows that
20.0885C x ACx x
κΔΔ = − = − (91)
As an example consider a capacitance type gage with air as the medium,
21A cm= , 0.3 0.03x mm cm= = . We then have 0.0885 1 2.950.03
C pF×= = . The
sensitivity defined by the partial derivative of C with respect to x
is 2.95 98.3 /0.03
C CS pF cmx x
∂= = − = − = −∂
.
Bridge circuit for capacitance pressure gage: Schematic of a bridge circuit for a capacitance pressure gage is shown in
Figure 87. The circuit is driven by alternating current input at high frequency
and coupled using a transformer, as shown in the figure.
Figure 87 Bride circuit for capacitance pressure gage
P
Pref
AC Output
Diaphragm

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
Electrical input and output Electrical input and output of pressure transducersof pressure transducers
• Standard input:–5-24 V DC for amplified voltage
output transducers–8-30 V DC for 4-20 mA current
output• Standard output:
–0-5 or 0-10 V DC output (used in industrial environments)
–4-20 mA current output (pressure transmitters)
Figure 88 Summary of typical electrical input and output values
Either a balanced or unbalanced mode of operation of the bridge circuit is
possible. In the balanced mode of operation the variable capacitor is adjusted
to bring the bridge back to balance. The position of a dial attached to the
variable capacitor may be marked in pressure units. Alternately the output
may be related to the pressure by direct calibration. Figure 88 indicates the
typical electrical input output pairs for pressure transducers. In the current
output type of instrument 4 mA corresponds to 0 pressure and 20 mA
corresponds to full scale (dependent on the range of the pressure transducer).
Current transmitters of this type will be discussed later. The full scale may be
a few mm of water column up to pressures in the MPa range. The scale is
linear over the entire range of the transducer. Note that this type of gage may
also be used for measurement of pressures lower than the atmospheric
pressure.
Measurement of transient pressures: In continuation of what we have said about transient pressures, we note
the following points:
• Transient behavior of pressure measuring instruments is needed
to understand how they will respond to transient pressures.

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
• Measurement of transient or time varying pressure requires a
proper choice of the instrument and the coupling element
between the pressure signal and the transducer.
• Usually process pressure signal is communicated between the
measurement point and the transducer via a tube.
• The tube element imposes a “resistance” due to viscous friction.
• Viscous effects are normally modeled using laminar fully
developed flow assumption (discussed earlier while considering
the transient response of a U tube manometer).
Before we proceed with the analysis we shall look at a few general things.
These are in the nature of comparisons with what has been discussed earlier
while dealing with transients in thermal systems and in the case of the U tube
manometer. We shall keep electrical analogy in mind in doing this.
Thermal system: Thermal Capacity C (J/K) = Product of mass (M, kg) and specific heat (c, J/kg
K). With temperature T representing the driving potential, he representing the
enthalpy the specific heat capacity is given by ehcT
∂=∂
. Then, we
have, ehC Mc VT
ρ ∂= =
∂. Thermal resistance is given by 1R
hS= where h is the
heat transfer coefficient and S is the surface area. The time constant is given
by McRChS
τ = = (using analogy with an electrical circuit).
Pressure measurement in a liquid system: Driving potential is the head of liquid h (m). Volume of liquid V (m3) replaces
enthalpy in a thermal system. Thus the capacitance is dVCdh
= and has units
of m2. We have already seen that the resistance to liquid flow is defined

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
through the relation dpRdm
= − with p standing for pressure and m standing for
the mass flow rate. Again the time constant is dV dpRCdh dm
τ = = − .
Gas system: Potential for bringing about change is the pressure p. The mass of the gas m
replaces the enthalpy in the thermal system. The capacitance is given
by dmCdp
= . With m being given by the product of density and volume, we
have ( )dm d VCdp dp
ρ= = . The capacitance depends on the process that the gas
undergoes while the pressure transducer responds to the transient. If we
assume the process to be polytropic, then Constantn
pρ
= , where n has an
appropriate value ≥ 1. If, for example, the volume of the gas is held constant,
we have dC Vdpρ
= . For the polytrope, logarithmic differentiation
gives 0dp dnp
ρρ
− = or ddp npρ ρ= . With this the capacitance becomesC V
npρ
= .
Assuming the gas to be an ideal gas gp R Tρ= and hence the capacitance
isg
VCnR T
= . The resistance to flow is again given by the Hagen-Poiseuelle
law as in the case of a liquid. The time constant is then given byg
VRnR T
τ = .
Transient response of a bellows type pressure transducer: The bellows element may be considered as equivalent to a piston of area A
(in m2) spring arrangement as shown in Figure 89. Let the bellows spring
constant be K (in N/m). Let the displacement of the bellows element be b (in
m). Let the bellows gage be connected to a reservoir of liquid of density ρ
(kg/m3) at pressure P (in Pa). At any instant of time let p (in Pa) be the

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
pressure inside the bellows element. The displacement of the spring is then
given by the relation
ForceSpring constant
pAbK
= = (92)
Figure 89 Transient in a bellows type gage Let the connecting tube between the reservoir and the gage be of length L (in
m) and radius r (in .m). If the pressure P is greater than the pressure p, the
liquid will flow through the intervening tube at a mass flow rate given
by dbm Adt
ρ= . We know from the definition of connecting tube resistance that
this should equal P pmR−
= . All we have to do is to equate these two
expressions to get the equation governing the transient.
KP bdb P p AAdt R R
ρ−−
= = (93)
The latter part of the equality follows from Equation 92. The above equation
may be rearranged in the form
2A R db Ab PK dt Kρ⎛ ⎞
+ =⎜ ⎟⎝ ⎠
(94)
`We see that the transient of a bellows type gage is governed by a first order
ordinary differential equation with a time constant2A RKρτ = . Hence the
bellows type gage is a first order system just like the first order behavior
L
Pressure P
Coupling Element
p
Displacement Element
Bellows (Spring)
Fixity
2r

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
exhibited by a first order thermal system. We infer from the above that the
capacitance of a bellows type gage is given by2ACKρ
= .

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
Example 30
A bellows pressure gage of area 1 cm2, spring constant K = 4.4 N/cm is
connected by a 2.5 mm ID tubing that is 15 m long in a process
application. Measurement is of pressure of water at 30°C. Determine the
time constant of this gage.
The given data for the gage:
2 4 21 10 , 4.4 / 440 /A cm m K N cm N m−= = = = The given data for the connecting tube:
2.5 1.25 0.00125 , 152 2IDr mm mm m L m= = = = =
Properties of water required are taken from tables. These are
3 6 2995.7 / , 0.801 10 /kg m m sρ ν −= = ×
The tube resistance is calculated as
( )6
174 4
8 8 0.801 10 15 1.2532 100.00125
LR m srνπ π
−−× × ×
= = = ××
The capacitance is given by
( )2428 2
10 995.72.26 10
440AC s mKρ
−−
×= = = ×
The time constant is then given by
7 81.2532 10 2.26 10 0.284RC sτ −= = × × × =

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
Force balancing element for measuring pressure:
Figure 90 Transient in a force balance transducer Figure 90 shows the arrangement in a force balance element. It consists of
a diaphragm gage that is maintained in its zero displacement condition by
applying a force that balances the pressure being measured. The required
force itself is a measure of the pressure. Let us assume that the pressure
being measured is that of a gas like air. If the diaphragm displacement is
always in the null the volume of the gas within the gage is constant. If the
pressure P is greater than pressure p mass flow takes place from the
pressure source in to the gage to increase the density of the gas inside the
gage. The time constant for this system is just the one discussed earlier and
is given by
g
VRnR T
τ = (95)
In case the instrument is not the null type (where the diaphragm displacement
is zero at all times), the capacity should include both that due to density
change and that due to displacement. Since the displacement is very small, it
is appropriate to sum the two together and write
2
g
A VCK nR Tρ
= + (96)
The above is valid as long as the transients are small so that the changes in
density of the fluid are also small. In most applications this condition is
satisfied.
Force p
Pressure P
L
2r

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
Example 31
A bellows type pressure gage of effective area A = 0.25 cm2, spring
constant K = 100 N/m is connected by a 1.5 mm ID 10 m long stainless
tubing in a process application. The volume of the effective air space
in the bellows element is V = 2 cm3. Determine the time constant if the
pressure measurement is a pressure around 5 bars and the
temperature is 27°C.
We assume that the pressure hovers around 5 bars during the
transients. The air properties are taken from appropriate tables.
Air properties:
55 5 10 , 27 300 , 287 /gp bars Pa T C K R J kg K= = × = ° = =
The density of air is calculated as
535 10 5.807 /
287 300g
p kg mR T
ρ ×= = =
×
The dynamic viscosity of air is (from table of properties)
51.846 10 /kg m sμ −= × The kinematic viscosity is hence given by
56 21.846 10 3.179 10 /
5.807m sμν
ρ
−−×
= = = ×
The capacity is calculated based on Equation 96
( )242 611 2
0.25 10 5.807 2 10 5.289 10100 1.4 287 300g
A VC m sK nR Tρ
− −−
× × ×= + = + = ×
× ×
In the above we have assumed a polytropic index of 1.4 that
corresponds to an adiabatic process.
The fluid resistance is calculated now as
68 1
44
8 8 3.179 10 10 2.559 10 ( )0.0015
2
LR m srνπ
π
−−× × ×
= = = ×⎛ ⎞×⎜ ⎟⎝ ⎠
The time constant of the transducer is then given by 8 112.559 10 5.289 10 0.0135RC sτ −= = × × × =

Mechanical Measurements Prof. S.P.Venkateshan
Indian Institute of Technology Madras
Example 32
Rework Example 28 assuming that the gage operates in the null mode.
The capacity is given by
611 22 10 1.659 10
1.4 287 300g
VC m snR T
−−×
= = = ×× ×
In the above we have assumed a polytropic index of 1.4 that
corresponds to an adiabatic process.
The fluid resistance is calculated now as
68 1
44
8 8 3.179 10 10 2.559 10 ( )0.0015
2
LR m srνπ
π
−−× × ×
= = = ×⎛ ⎞×⎜ ⎟⎝ ⎠
The time constant of the transducer is then given by
8 112.559 10 1.659 10 0.0042RC sτ −= = × × × =