Embed Size (px)
Citation preview

The Pennsylvania State University
The Graduate School
Graduate Program in Acoustics
MEASUREMENTS ON GALFENOL MATERIAL AND TRANSDUCERS
A Thesis in
Acoustics
by
Ryan S. Scott
2008 Ryan S. Scott
Submitted in Partial Fulfillment of the Requirements
for the Degree of
Master of Science
May 2008

ii
The thesis of Ryan S. Scott was reviewed and approved* by the following:
Richard J. Meyer Associate Professor of Acoustics Senior Research Associate Thesis Advisor
Stephen C. Thompson Professor of Acoustics Senior Scientist
Thomas B. Gabrielson Professor of Acoustics Senior Scientist
Anthony A. Atchley Professor of Acoustics Head of the Department of the Graduate Program in Acoustics
*Signatures are on file in the Graduate School

iii
ABSTRACT
Magnetostriction can be described most generally as the deformation of a material
in response to a change in its magnetization. A magnetostrictive transducer was designed
and tested in partnership with Etrema, Inc using Galfenol as the active material. This
transducer was the first tonpilz element to be built with Galfenol. Initial attempts at
predicting the transducer’s performance using finite element analysis showed that more
accurate measurements of the magnetostrictive constant, elastic constant, permeability,
and mechanical quality factor were needed. Measurements of the transducer’s
performance also showed that these properties are nonlinear with drive level and highly
dependent on the magnetic bias field.
A simple measurement technique was needed to accurately determine and track
material properties as this unique material is developed. A method for measuring these
properties as a function of magnetic bias and AC drive amplitude was developed. A
matrix of the magnetostrictive material properties as a function of magnetic bias and
drive level was created using this method for Galfenol. An experimental sonar transducer
was built and tested to validate the measurement process. The measured performance is
compared with a finite element model using the material properties measured in this
work. Permeability is shown to be accurately measured. The predicted resonance
frequency of the transducer is 11 percent higher then measured showing that
improvements need to be made in measuring the elastic constant.

iv
TABLE OF CONTENTS
LIST OF FIGURES ..................................................................................................... v
LIST OF TABLES ....................................................................................................... viii
ACKNOWLEDGEMENTS ......................................................................................... ix
Chapter 1 Introduction................................................................................................ 1
1.1 Background ..................................................................................................... 1 1.2 Magnetism ...................................................................................................... 3 1.3 Magnetostriction............................................................................................. 4 1.4 Governing Equations ...................................................................................... 6 1.5 Galfenol .......................................................................................................... 8 1.6 Experimental Galfenol Transducer ................................................................. 10 1.7 Measuring Material Properties ....................................................................... 12 1.8 Proposed Work ............................................................................................... 15
Chapter 2 Theory ........................................................................................................ 17
2.1 Magnetics........................................................................................................ 17 2.2 Magnetostriction............................................................................................. 20
Chapter 3 Experimental Method ................................................................................. 22
3.1 Requirements .................................................................................................. 22 3.2 Apparatus Design............................................................................................ 23 3.3 Procedure ....................................................................................................... 38 3.4 Data Analysis .................................................................................................. 44
Chapter 4 Results ........................................................................................................ 54
4.1 Galfenol Samples ............................................................................................ 54 4.2 Property Measurements vs DC Bias ............................................................... 57 4.3 Measurements versus AC Drive Level........................................................... 63 4.4 Uncertainty ..................................................................................................... 67
Chapter 5 ...................................................................................................................... 76
5.1 Property Discussion........................................................................................ 69 5.2 Transducer Measurements .............................................................................. 70 5.3 Future Work .................................................................................................... 77
Bibliography................................................................................................................. 78

v
LIST OF FIGURES
Figure 1-1: Typical WWII magnetostrictive sonar transducer designs reproduced from [6] ................................................................................................................. 2
Figure 1-2: Orientation of magnetic domains a) paramagnetic state, b) ferromagnetic state with zero net magnetization and c) fully saturated state reproduced from [2] .............................................................................................. 5
Figure 1-3: Induced strain as a function of applied magnetic field reproduced from [3].......................................................................................................................... 6
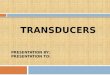
Figure 1-4: Schematic (left) and photograph (right) of the dual rod galfenol transducer.............................................................................................................. 11
Figure 2-1: magnetic field lines representing the magnetic field generated by a (a) single coil turn b) solenoid and c) helmholtz coil................................................. 19
Figure 3-1: Galfenol strain vs magnetic field curve showing the desired operating region of magnetic excitation as measured by Etrema, Inc. ................................. 24
Figure 3-2: Schematic showing parallel sections of turns within one DC coil............ 27
Figure 3-3: AC and DC helmholtz coils ...................................................................... 32
Figure 3-4: AC and DC helmholtz coils showing mandrel geometry ......................... 33
Figure 3-5: Measured DC magnetic field vs axial center with medium DC current input ...................................................................................................................... 34
Figure 3-6: Magnetic field versus axial distance for the AC helmholtz coil pair at medium drive at 1 kHz ........................................................................................ 35
Figure 3-7: Magnetic end-piece geometry with metal tab shown................................ 37
Figure 3-8: Simulated magnetic field versus axial position generated by the DC helmholtz coil pair without the sample rod, with the rod and with the rod and magnetic end-pieces in place. Plotted magnitude is normalized to the field generated with no rod in place. ............................................................................. 37
Figure 3-9: Fixture for holding magnetostrictive sample in place with magnetic end-pieces and sense-coil in place ........................................................................ 38
Figure 3-10: Plot depicting timing of AC trigger delay as compensation for the DC bias current ramp up and overshoot ............................................................... 40

vi
Figure 3-11: Block diagram showing equipment setup ............................................... 41
Figure 3-12: Input current as a function of time .......................................................... 44
Figure 3-13: Magnetic Field as a function of time ...................................................... 45
Figure 3-14: Sense-coil voltage as a function of time ................................................. 46
Figure 3-15: Velocity as a function of time ................................................................. 47
Figure 3-16: AC coil impedance measured with the DC coil leads electrically open....................................................................................................................... 48
Figure 3-17: AC coil impedance measured with the DC coil leads electrically shorted................................................................................................................... 49
Figure 3-18: Sine sweep current input from constant voltage input ............................ 50
Figure 3-19: Resultant sine swept magnetic field ........................................................ 51
Figure 3-20: Measured Velocity resulting from sine swept magnetic exciation ......... 52
Figure 4-1: Strain as a function of magnetic field measured at 1 Hz with a 2.275 MPa preload .......................................................................................................... 55
Figure 4-2: Magnetic flux as a function of magnetic field measured at 1 Hz with a 2.275 MPa preload ............................................................................................. 56
Figure 4-3: Relative permeability, µr, as a function of DC bias for rods A, B and C at low AC drive level............................................................................................ 58
Figure 4-4: Magnetostrictive constant, d, as a function of DC bias for rods A, B and C at low AC drive level ................................................................................. 59
Figure 4-5: Elastic Constant as a function of DC bias for rods A, B and C at low AC drive level....................................................................................................... 60
Figure 4-6: Mechanical Quality Factor as a function of DC bias for rods A, B and C at low AC drive level ........................................................................................ 61
Figure 4-7: Fundamental longitudinal resonance frequency as a function of DC bias for rods A, B and C at low AC drive level.................................................... 62
Figure 4-8: Relative permeability as a function of AC drive level for rods A, B and C at low optimum DC bias............................................................................. 63

vii
Figure 4-9: Magnetostrictive constant as a function of AC drive level for rods A, B and C at low optimum DC bias ......................................................................... 64
Figure 4-10: Elastic constant as a function of AC drive level for rods A, B and C at low optimum DC bias ....................................................................................... 65
Figure 4-11: Mechanical quality factor as a function of AC drive level for rods A, B and C at low optimum DC bias ......................................................................... 66
Figure 4-12: Fundamental longitudinal resonance frequency as a function of AC drive level for rods A, B and C at low optimum DC bias .................................... 67
Figure 5-1: Impedance as a function of frequency for increasing drive level for the dual-rod Galfeno l transducer ................................................................................ 71
Figure 5-2: Galfenol transducer built to validate experimental results........................ 72
Figure 5-3: Galfenol transducer without coil and magnetic return path cylinder ........ 73
Figure 5-4: Final state of the Galfenol transducer as tested......................................... 73
Figure 5-5: Measured (blue) and modeled (green) impedance as a function of frequency for the single rod Galfenol transducer in air at a DC bias of 155 and 200 Oe at low AC drive level ........................................................................ 74

viii
LIST OF TABLES
Table 1-1: Definition of variables used in magnetostrictive equations ....................... 7
Table 1-2: Comparison of maximum strain capability for nickel, Terfenol-D and Galfenol [3], [5], [6] ............................................................................................. 8
Table 1-3: Comparison of Galfenol and Terfenol-D material properties [3], [14] ...... 10
Table 3-1: Instruments Inc. L-10 Channel Settings ..................................................... 25
Table 3-2: DC Helmholtz coil parameters ................................................................... 27
Table 3-3: Incremental values of correction factor, K, for non- ideal solenoid inductance [13] ..................................................................................................... 29
Table 3-4: Choices of AC coil parameters and predicted magnetic field magnitude .. 30
Table 4-1: Diameter and length for each Galfenol sample .......................................... 54
Table 4-2: Maximum values for d and µ with corresponding optimum bias fields as measured at Etrema measured at 1 Hz with a prestress of 2.275 MPa [14] ..... 57
Table 4-3: Mean and Standard Deviations for 10 measurements of magnetic field, sense-coil voltage and velocity............................................................................. 68

ix
ACKNOWLEDGEMENTS
I would like to take this opportunity to thank my adviser Dr. Rich Meyer for his
wonderful guidance and patience throughout the scope of this project. I would also like to
thank my family and friends for being so supportive and encouraging. I give credit to my
Grandpa Max and my father for instilling the engineering spirit in me. This work would
not be possible without the help of many people at the Applied Research Lab, including
Eric Bienert and Mark Wilson. Also, I owe a great deal to Scott Porter for helping out so
much with experiments and for being such a great peer with which I could discuss the
complex issues of magnetism. I would also like to thank all of the faculty and staff in the
Graduate Program in Acoustics at Penn State for providing such a warm atmosphere to
gain such an amazing education.

Chapter 1
Introduction
1.1 Background
SONAR (SOund Navigation And Ranging) is the transmission of acoustic energy
through water. It is commonly used to transmit signals and as a means for locating
objects under water. The general operating frequency ranges from several hundred hertz
to hundreds of kilohertz. Magnetostrictive materials were commonly used in WWII sonar
transducer designs. A few examples of such designs are shown in Figure 1-1 [6].
Magnetostrictive materials undergo a body deformation in response to a change in
magnetization. This process also happens in reverse, where an imposed deformation of
the material will induce a change in magnetization. This characteristic is what enables
magnetostrictive materials to be used as the active material in transducers.
The discovery of piezoelectric materials soon replaced magnetostrictives in most
sonar applications due to the larger strain capabilities and higher energy densities. The
recent discovery of giant magnetostrictive materials such as Terfenol-D and Galfenol has
led to a renewed interest in using magnetostrictives for transducer design. Although it is
not expected that giant magnetostrictive materials will replace piezoelectrics, they do
possess characteristics which make them suitable for certain sonar applications. These
characteristics include competitive strain capabilities and in the case of Galfenol, a
physical robustness and durability which piezoelectrics do not have.

2
When designing a transducer, it is useful to the engineer to predict the behavior of
the finished product using modeling techniques such as lumped parameter or finite
element computer models. Accurate measurements of the material properties must be
made in order for meaningful results to be obtained from a model or simulation. The most
important magnetostrictive material properties for sonar transducer design are the
magnetostrictive coupling coefficient (d), elastic compliance (s) and magnetic
permeability (µ). These properties are dependent on magnetic bias, AC drive amplitude,
temperature, manufacturing processes, and composition. A robust method is required to
Figure 1-1: Typical WWII magnetostrictive sonar transducer designs reproduced from [6]

3
accurately measure these material properties to aid the transducer designer in modeling
how magnetostrictive materials will behave in a transducer system. The work in this
thesis will develop a method which can measure d, sH, µT and Qm simultaneously.
1.2 Magnetism
Due to the nature of magnetostrictive materials, a brief overview of magnetic
theory is presented. Oersted first discovered that a magnetic field, H, is produced in the
presence of moving charge [2]. A conductor will generate a magnetic field around it
according to the right-hand-rule. A magnetic field can also be produced by a material
which is magnetically saturated and retains a remnant flux density. To find the moving
charge in this case, one must examine the electron cloud structure of the material. To gain
a basic understanding of the field generated we first look at Ampere’s circuital law
where N is the number of current-carrying conductors, each carrying a current i amps,
and l is a line vector to the point of interest [2]. Carrying out the integration for a long
thin solenoid gives the generated magnetic field
where L is the length of the coil. This says that a magnetic field is generated within the
coil proportional to the number of turns and current in the wire and inversely proportional
to the coil’s length.
∫ ⋅= dlHNi 1-1
LNi
H = 1-2

4
When a magnetic field is generated in a medium the response of the medium is a
magnetic induction B, also called the flux density. The relationship between magnetic
field and magnetic induction is called the permeability, µ, of the medium where
The permeability of a material is generally given relative to the permeability of free
space, mHo /104 7−×= πµ .
1.3 Magnetostriction
Magnetostriction can be described most generally as the deformation of a body in
response to a change in its magnetization. This linking between mechanical and magnetic
domains can be explained by analyzing the problem on an atomic level where magnetism
is an intrinsically quantum mechanical and relativistic phenomenon. The scope of this
thesis is intended to cover the behavior of magnetostrictive materials on a macroscopic
level. The reader is directed to Chapter 1 of Engdahl [3] for an in-depth analysis of the
origins of magnetostriction at the atomic level.
The phenomenon of magnetostriction was discovered in the mid nineteenth
century. In 1842 Joule carried out a number of experiments characterizing the fractional
change in length of an iron bar when magnetized. The converse effect, a change in
magnetization induced by a strain was discovered by Villari [4].
Magnetostriction can be thought of as the rotation of magnetic domains within the
material. Above the Curie temperature the material is in a paramagnetic state, meaning
HB µ= . 1-3

5
that it exhibits no strain or magnetization in any direction. Below the Curie temperature
the magnetic domains randomly align and result in a net magnetization of zero. As a
magnetic field is applied to the material these domains rotate to align with the applied
magnetic field, causing a change in material volume as illustrated in Figure 1-2. This
alignment occurs until saturation is reached when all domains are oriented with the
applied magnetic field [2].
The relationship between magnetic field and strain is quadratic in nature. A
positive strain is induced for an applied magnetic field in either the positive or negative
direction. A generic plot of applied magnetic field versus induced strain is shown in
Figure 1-3. The point of saturation can be seen where the application of more magnetic
field does not result in any further strain. The section between zero applied field and
Figure 1-2: Orientation of magnetic domains a) paramagnetic state, b) ferromagnetic state with zero net magnetization and c) fully saturated state reproduced from [2]

6
magnetic saturation can be modeled as linear over a fairly wide range. Sonar transducers
are designed to operate in this region due to higher efficiencies. If an oscillating magnetic
field is applied around the origin then a frequency doubling will occur in the strain
output. In order to avoid this, a magnetic bias is required around which the magnetic field
is oscillated.
1.4 Governing Equations
A first order approximation of magnetostriction can be made if we assume that
the material is being operated in the linear range and that variations in the system
parameters are small compared with the initial values of the parameters. The governing
equations can then be written as
Figure 1-3: Induced strain as a function of applied magnetic field reproduced from [3]

7
where a superscript S, T, H and B denotes which quantity is constant and superscript tr
denotes the matrix transpose [10]. For example, sH is the elastic compliance with H held
constant. It should be noted that these equations only describe relative changes or
oscillations with respect to an absolute quantity. Table 1-1 defines the variables used and
their respective SI units. Only one set of equations are required to completely describe
the system. The other three sets can be derived from the first through matrix
manipulation. The first set of equations 1-4 and 1-5 will be used in this work.
HdTsS trH += , 1-4
HdTB Tµ+= , 1-5
HeScT trH −= , 1-6
HeSB Sµ+= , 1-7
BgTsS trB += , 1-8
BvgTH T+−= , 1-9
BhScT trB −= , and 1-10
BvhSH S+−= 1-11
Table 1-1: Definition of variables used in magnetostrictive equations
Quantity Symbol SI Unit Stress T N/m2 Strain S numeric Magnetic Field Strength H A/m Magnetic Flux Density B T Elastic Compliance s m2/N Permeability µ H/m Effective magnetostrictive constant d m/A

8
The three properties which are needed to describe a magnetostrictive material’s
behavior using equations 1-4 and 1-5 are defined as
1.5 Galfenol
Galfenol is a magnetostrictive alloy deriving the name from its atomic makeup of
gallium and iron and the laboratory that it was developed at, the Naval Ordinance
Laboratory (now the Naval Surface Warfare Center). The material tested in this work has
a composition of 18.4 at% Ga. Terfenol-D is a magnetostrictive material made up of
terbium, dysprosium and iron which is named in similar fashion to Galfenol. A
comparison of the maximum measured strain output of Terfenol-D, Galfenol and Nickel
is shown below in Table 1-2.
HT T
BHS
d∂∂
=∂∂
= , 1-12
H
H
TS
s∂∂
= , and 1-13
T
T
HB
∂∂
=µ . 1-14
Table 1-2: Comparison of maximum strain capability for nickel, Terfenol-D and Galfenol [3], [5], [6]
Material Maximum Strain [ppm]
Nickel 40
Terfenol-D 1400
Galfenol 400

9
Galfenol possesses many properties which make it unique and advantageous as
the active element in sonar transducers. Unlike Terfenol-D, it is not brittle and can thus
withstand large tensile stress. It is possible to stress anneal Galfenol such that it has full
magnetostriction far into the tensile range [5]. The need for a prestress bolt which is
required for most other sonar materials is not required for Galfenol due to its ability to be
stress annealed and its large tensile strength. This opens the door for more creativity in
the transducer design and is a feature which makes Galfenol attractive to sonar transducer
designers. The comparatively high ductility also means that it can be rolled into sheets
which allows for the previous work on nickel designs from WWII to be resurrected and
evaluated with Galfenol in mind. The permeability of Galfenol is approximately twenty
times greater then that of Terfenol-D. Because flux lines tend toward a medium of higher
permeability, Galfenol will act as a more efficient material in the magnetic return path
when compared with magnetostrictives of lower permeability. Table 1-3 compares
approximate material properties of Galfenol and Terfenol-D taken from measurements
made at Etrema, Inc and values listed in Engdahl [3]. Measurements of Galfenol’s
properties were made at Etrema by applying a 1 Hz magnetic field to full magnetic and
mechanical saturation while the induced flux and strain were recorded.

10
1.6 Experimental Galfenol Transducer
A proof of concept transducer was designed and built in partnership with Etrema,
Inc. as a joint project. Galfenol was used as the active material to showcase the unique
characteristics. The transducer was designed to take full advantage of galfenol’s high
permeability and mechanical strength. A schematic and picture of the transducer are
shown in Figure 1-4. Two parallel rods of galfenol are used as the active material which
push and pull in unison. Both rods also act as sections of the magnetic circuit. A high
permeability cylinder is typically used to complete the magnetic circuit for single rod
magnetostrictive transducers. The galfenol rods are stress annealed which removes the
need for a mechanical preload typically applied by a prestress bolt. The goal was a larger
volume of active material and fewer mechanical and magnetic complications in the
design. The goal of the design was to operate in tension, have an active magnetic return
path and not require a mechanical bias bolt.
Table 1-3: Comparison of Galfenol and Terfenol-D material properties [3], [14]
Units Galfenol Terfenol-D
s33H m2/N 17E-12 42E-12
d33 m/A 18E-9 11E-9
µ33/µo --- 70 4 ρ kg/m3 7870 9200

11
The work in this thesis originally began by testing and modeling this transducer
with the intent of verifying that modeling techniques can accurately predict the behavior
of a magnetostrictive transducer. Modeled impedance and experimentally measured
impedance are shown in Figure 1-5. The modeled resonance frequency is 40% higher
then measured and overall impedance magnitudes are not in agreement. It was decided
that more accurate measurements of Galfenol material properties were required to
correctly model the transducer. A further discussion of the transducer performance will
be provided in Chapter 4.
Figure 1-4: Schematic (left) and photograph (right) of the dual rod galfenol transducer

12
1.7 Measuring Material Properties
Galfenol offers the sonar transducer designer many options in regards to
mechanical and magnetic design. With so many possible design variations it becomes
necessary to have accurate modeling capabilities. The use of such modeling techniques as
finite element analysis and equivalent circuits has been shown to accurately predict and
1
10
100
1000
10000
5 7 9 11 13 15 17 19
Frequency [kHz]
|Z| [
Oh
ms]
ModeledMeasured
Figure 1-5: Modeled and experimentally measured in-air impedance magnitude of the dual rod Galfenol transducer showing the need for more accurate material properties.

13
model transducers [3] [4] [6]. Accurate knowledge of material properties must be used in
order for the model to produce meaningful predictions.
The methods for measuring magnetostrictive material properties for use in early
sonar transducer designs are summarized in the NRDC Summary Technical Report [6].
The method uses samples in the form of laminated stacks of rings. Permeability is first
measured using the inductance which uses one coil wound on the ring stack to generate
magnetic field and another to measure the induced magnetic flux. The ring stack is then
suspended in a toroidally wound solenoid allowing for unconstrained radial expansion
while immersed in the generated magnetic field. The motional- impedance circle and
measured permeability are used with the governing equations to determine the
magnetostrictive and stiffness coefficients at constant field. This method could be directly
applied once the manufacturing technology for production grade Galfenol becomes
capable of producing laminated rings.
Meeks and Timme developed a method which eliminates the problem of
laminating the sample under investigation [7]. A rod of magnetostrictive material is
placed in a gap of equal length in an iron core magnetic return path around which a
magnetic drive coil is wound. A sense coil is wrapped around the magnetostrictive rod.
Meeks and Timme derived an analytical expression for the impedance as seen at the coil
leads which accounts for eddy current losses in the material based on a complex
permeability. The material property values can be determined by matching the analytical
solution to the experimentally measured values. Both ends of the sample are physically
blocked by the magnetic return path so this makes direct measurement of the strain
difficult.

14
Faidley and Lund devised a method which places a rod of the magnetostrictive
sample in a transducer type device [8]. The apparatus consists of a solenoid, a magnetic
return path and a mechanical bias. It should be noted that this apparatus was designed to
test Terfenol-D, which cannot be stress annealed and requires a mechanical bias. The
analysis looks at the shape of hysteresis loops in the displacement versus applied field
measurements. The susceptibility, permeability and effective magnetostrictive constant
can be determined from these measurements. These properties were measured as a
function of magnitude and frequency of the AC magnetic field and magnitude of the DC
bias. This method does not allow for the measurement of the elastic stiffness. The
measurement is also complicated by the fact that the magnetostrictive sample under
investigation is part of a transducer system, and data are not directly measured on the
material itself. The contributions of added mass from the magnetic return plate and
linearity of prestress mechanism are details which further complicate the measurement
procedure. The magnetostrictive sample is physically encased in the experimental
apparatus so it is visibly obstructed and is also close to the solenoid which raises issues of
heating while being run at high fields. This is an important aspect to note due to the
temperature dependence of the magnetostrictive constants.
Kellogg and Flatau performed experiments to measure the stiffness coefficient of
magnetostrictive materials as a function of applied DC magnetic field under quasi-static
conditions [9]. A force is applied to the sample with a load cell and the resultant strain
was measured. The sample was placed inside a magnetic drive coil which allowed for a
DC magnetic field to be applied. A cooling system was incorporated in the transducer
construction in order to eliminate temperature from the variables in the experiment.

15
Because magnetostrictive materials used in sonar applications are typically run at
resonance, the stiffness coefficient should be measured under these conditions. This
method does not enable this measurement to be made.
A simple method for measuring d, µT , sH, and Qm simultaneously is not presented
in the literature. A method for measuring these properties as a pure measurement on a
material sample without the influence of a transducer device is also missing. The ultimate
purpose for performing these measurements is to acquire accurate material property data
for use in transducer design. Previous methods used cannot measure all the desired
quantities and thus require the use of multiple experimental setups. A method which
allows the quick characterization of a magnetostrictive sample from batch to batch is
desired by both manufacturers for quality control and the ability to give accurate data to
the end user.
1.8 Proposed Work
The work in this thesis develops an experimental technique that can measure the
main desired material properties as a function of DC magnetic bias and AC magnetic
drive level. The material sample will be placed in a uniform magnetic field generated by
larger drive coils which eliminates the need for a magnetic return path. By suspending the
material sample in the magnetic field generated by a physically open coil system, the
measurements will be purely dependent on the material properties themselves with no
influence from the experimental apparatus. Open coils also allow for observation of the
sample’s temperature with a thermal camera. Such independent measurements are the

16
ultimate goal in characterizing magnetostrictive materials and are required to accurately
design sonar transducers with these materials.
Material properties can be measured as a function of DC bias, drive amplitude and
temperature. The test method shown in this thesis is also robust in that variation in
sample geometry is allowable.

Chapter 2
Theory
2.1 Magnetics
Magnetic field, H, can be considered to be the most fundamental concept in
magnetics. A magnetic field is produced by electric charge in motion, as first discovered
by Oersted in 1819 [11]. This moving charge can be in the form of a current in a wire or
the orbital motions and spins of electrons within a permanent magnetic material. To
calculate the strength of the magnetic field Biot-Savart law can be used in the form
where i is the current flowing in an elemental length dl of conductor, r is the radial
distance, u is a unit vector along the radial direction and dH is the contribution to the
magnetic field at r due to the current in the elemental length [2]. It can be shown that
equation 2-1 is equivalent to Ampere’s circuital law. Units of magnetic field, H, are given
in A/m.
When a magnetic field, H, is generated in a medium, the response by the medium
is its magnetic induction, B, also referred to as the magnetic flux density. The units of
magnetic induction, B, are given in tesla. A tesla is defined as the strength of magnetic
induction which generates a force of 1 newton per meter on a conductor carrying a
ulir
H ×= δπ
δ 241
2-1

18
current of 1 ampere perpendicular to the direction of the induction [2]. The units of one
tesla are equivalent to one Vs/m2. In free space the magnetic induction, B, is directly
proportional to H as given by
where µo is the permeability of free space defined as 7104 −×π H/m. The permeability of a
material is generally defined relative to the permeability of free space where
Using Faraday’s law and Lenz’s Law the law of electromagnetic induction can be written
as
where V is the induced voltage, N is the number of turns in the coil and A is the cross-
sectional area of the coil.
The Biot-Savart law can be used to determine the magnetic field generated by a
single-turn circular coil of radius a. Dividing the coil into elements of arc length dl, the
magnetic field can be written as [2]
This magnetic field is valid only at the center of a coil of finite length. The magnitude of
H quickly drops off with axial distance from the coil. A solenoid is a multi- turn coil
which generates a longer area of magnetic field at its center. Helmholtz coils can be used
if a more uniform magnetic field over a larger volume is required. This configuration
HB οµ= 2-2
οµµ
µ =r 2-3
dtdB
NAV −= 2-4
∑ ==ai
lir
H2
sin4
12 θδ
π. 2-5

19
consists of two flat coaxial coils with current flowing in the same direction in each coil.
The separation distance between the coils is equal to their common radius, a. Using the
Biot-Savart law, the magnetic field generated at any point along the axis of the Helmholtz
coils can be calculated as
The magnetic field lines for a single coil turn, a solenoid and a Helmholtz coil are shown
in Figure 2-1.
If a material of permeability greater than unity is placed in the generated magnetic
field, an interaction will occur. The magnetic field will tend to align the magnetic
domains in the magnetic material creating an induced magnetic pole oriented in the
opposite direction of the applied field. This induced magnetic pole tends to oppose the
applied field and reduce the overall magnitude of field seen by the magnetic material.
The severity of this trend is reduced as the ratio of length to diameter is increased. Long
( )
−++
+=
−− 5.1
2
25.1
2
2
112 a
xaax
aNi
H 2-6
(a) (b) (c)
Figure 2-1: Magnetic field lines representing the magnetic field generated by a (a) single coil turn b) solenoid and c) helmholtz coil [2]

20
thin rods are not affected by demagnetization to the same degree as a short fat rod. A
torus of material has a length to diameter ratio of infinity and is not affected by
demagnetization.
2.2 Magnetostriction
The governing equations for magnetostrictive materials were outlined in Chapter 1. The
independent variables required to fully describe the magnetostrictive behavior are defined
as
As defined above, the effective magnetostrictive constant, d, is the change in
strain for a change in magnetic field with uniform stress throughout the material. It is also
defined as a change in magnetic induction for a change in stress with a uniform magnetic
field throughout the material. The elastic compliance, sH, is defined as a change in strain
for a change in stress with a constant magnetic field throughout the material. The
permeability, µT , is defined in the same manner with the additional requirement that
stress be uniform throughout the material.
It is important for these properties to be clearly defined in order for accurate
experimental measurements to be made. The proposed method in this thesis will be based
on the definitions in equations 2-7 through 2-9.
HT TB
HS
d∂∂
=∂∂
= , 2-7
H
H
TS
s∂∂
= , and 2-8
T
T
HB
∂∂
=µ . 2-9


Chapter 3
Experimental Method
3.1 Requirements
A method is needed which can measure the magnetostrictive properties as defined
in Chapter 2. The goal of the work done in this thesis was to measure d, sH, Qm and µT as
a function of DC bias and AC drive level. The test method must allow for control and
variation of both of these parameters during the measurement procedure.
The geometry of the samples was chosen to be in the form of a rod to allow for
the simplified analysis that an axisymetric problem yields. The nominal sample size was
chosen to ease both the fabrication and measurement process. A longer rod will lower the
fundamental resonance frequency of the rod, thus lowering the effect of eddy current
losses during testing. A longer rod will, however, be harder to fabricate and yield fewer
samples per batch. It will also be more expensive to generate a uniform magnetic field
along the entirety of its length due to increased power requirements as the radius of the
Helmholtz coils is increased. It is also desired to allow for some flexibility in the exact
dimensions of the material sample being measured.
A length of 4.7 cm (1.85 inches) and a diameter of 0.318 cm (0.125 inches) were
chosen as a compromise between lowering the fundamental resonance frequency and
minimizing the required length of uniform magnetic field.

23
3.2 Apparatus Design
The experimental method is designed to meet the specifications required for
measuring the desired parameters. Helmholtz coils were chosen to generate the magnetic
field. When compared with a solenoid of equal magnetic field generation the open area
within the coil is significantly large r. This makes exact placement of the sample in the
apparatus less critical. The geometry of the sample is also less critical allowing more
flexibility as manufacturing techniques evolve. Temperature is also more easily
controlled due to physical separation of the material sample from the ohmic heating of
the coils.
Figure 3-1 shows the typical strain versus magnetic field behavior of Galfenol as
measured under quasistatic conditions. The operating region of DC bias and maximum
AC swing which is of most interest to the sonar transducer designer is represented as the
shaded region. The generated magnetic field requirements were chosen as a DC bias of 0
to 30 kA/m and an AC magnitude up to 15 kA/m (30 kA/m peak to peak). This allows for
measurement of the material properties through the entire linear region of the strain
versus field curve and AC drive into magnetic saturation.

24
The operating frequency of the AC coils was chosen to allow for a variation in
sample length. The AC coils must be able to apply an excitation field at and above the
fundamental longitudinal resonance frequency of the material sample being measured to
accurately measure the resonance frequency and mechanical quality factor. The
resonance frequency of the sample rods supplied was estimated to be about 30 kHz based
on the previously measured stiffness. A frequency range of up to 50 kHz was chosen for
the AC drive coils to allow for flexibility in the material sample sizes.
Figure 3-1: Galfenol strain as a function of applied quasistatic magnetic field as measured by Etrema, Inc (79.578 A/m = 1Oe). The optimum range of operation is highlighted.

25
Litz wire is commonly used to reduce electrical losses from high frequency
signals. Litz wire consists of a number of high gage insulated wires braided together to
reduce the power losses associated with eddy currents and the “skin effect” where current
tends to be concentrated at the surface of the conductor at high frequencies. The
resistance per unit length of typical Litz wire is higher then required for the DC coils.
This choice of wire conflicted with the need for a low resistance conductor for the DC
current component due to limitations in resistance per length of the wire available from
manufacturers. The required DC current was high based on preliminary calculations so
ohmic heating and available voltage was a factor in selecting wire gage. The competing
requirements of low resistance for the DC component and high frequency for the AC
component led to the decision to generate the AC and DC magnetic field with two
separate Helmholtz coil pairs. The separate coils could then be optimized for AC and DC
drive without sacrificing one for the other.
A 40 Volt and 25 Amp Sorrenson constant voltage amplifier is used as the DC
power supply. An Instruments Inc. L-10 is used as the AC power supply. Table 3-1
shows the channel settings available on the L-10.
A nominal radius for the DC coil pair was first chosen to achieve a magnetic field
with a magnitude of equal value within 1% over a cylindrical volume of 5.08 cm (2 inch)
length and 0.635 cm (0.25 inch) diameter while maximizing the current to magnetic field
Table 3-1: Instruments Inc. L-10 Channel Settings
Load Resistance [O] 3.5 7 14 28 56 111 222 Max Amps [A rms] 30 22 15 11 7.7 5.5 3.8 Max Volts [V rms] 106 150 212 300 425 600 850

26
conversion. A numerical simulation using Eq. 2-6 was used to determine the magnitude
and volume of uniform magnetic field as a function of the various coil parameters. It was
determined that a coil radius of 8.89 cm (3.5 inch) is required to achieve the DC magnetic
field.
The number of turns and wire gage were chosen next. These values were
optimized to maximize the generated magnetic field within the limits of the available DC
power supply. Increasing the number of turns will increase the value of generated
magnetic field per input current but this reaches a limit for a non- ideal wire having a
finite resistance per unit length. Choosing the wire gage required a compromise between
minimizing wire resistance or wire diameter and dimensions of the coil. Increasing the
length and thickness of the coils also means further deviation from the assumptions that a
Helmholtz coil’s radius is much larger then its length and that the ratio of outer to inner
radius is close to one. The resistance can be reduced by splitting the total turns into
several parallel sections. This is shown schematically in Figure 3-2. Each parallel section
of turns is represented as a lumped resistance, R, and an inductance, L. An interwinding
capacitance, Cwind, is also present in each of the coils. The exact value of the capacitance
is difficult to predict because it is highly dependant on how tightly the coil is wound.

27
A compromise between maximizing the generated magnetic field and minimizing
the resistance and capacitance was made in selecting the number of turns and parallel
sections. The selected DC coil parameters are shown in Table 3-2.
Due to heating effects, the DC coils were implemented with a switch which turns
on just before a measurement is made. The steady state electrical impedance of the DC
coil is only dependent on the combination of parallel wire resistances. The transient
response, as the current is ramped up, will oscillate or “ring” about the steady state value.
The DC power supply contains a feedback loop which attempts to minimize this ringing
Figure 3-2: Schematic showing parallel sections of turns within one DC coil
Table 3-2: Final DC Helmholtz coil parameters
Nominal Radius 8.89 cm (3.5 in) Number of turns 800 Number of parallel sections 4 (200 turns/section) Wire Gage 18 AWG
Cwind R
L
R R R

28
and reach steady state. This issue is overcome by using a trigger to delay the AC
excitation and data capture until the DC steady state is reached.
The presence of the DC coils set a limit on the size and spacing of the AC coils.
The AC drive coils were designed to fit within the DC coils to allow for more leeway in
the choice of AC coil radius. The inner radius of the DC coils restricted the maximum
outer radius of the AC coils. This meant that maintaining the magnetic field magnitude
within 1% of the center value was not possible. This requirement was relaxed to 3% and
was met by choosing a radius of 6.35 cm (2.5 inch) for the AC coils. This also allowed
for a reasonable thickness in the coil turns of both sets of coils. The frequency range up to
50 kHz demanded that Litz wire be used as the AC coil windings. Litz wire is sold as
bundles of a specific wire gage. The first step in Litz wire selection is to choose the gage
based on the upper frequency limit. In this case 36 AWG was chosen to allow for the
desired frequency range. The resistance per unit length and current carrying capacity is
set by the number of parallel strands in the bundle. The wire was chosen to be 20/36
AWG litz wire, which is made of 20 strands of 36 AWG wire in the braided
configuration which reduces surface losses.
As the drive frequency is increased the electrical impedance will become
dominated by the inductance of the coils. The inductance of a coil, L, can be calculated as
where A is the area of the coil and K is a correctional factor for non- ideal solenoids.
Values of K for various increments of radius/length are shown in Table 3-3.
lAN
L ro2µµ
κ= 3-1

29
The inductance is directly dependent on the core permeability, coil area and the
number of turns squared and is inversely proportional to the coil length. The cross
sectional area of Galfenol covers less then 1% of the coil’s cross sectional area. The core
permeability is assumed to be that of air in order to estimate the impedance of the AC
coils during the design procedure. This was verified experimentally after constructing the
Helmholtz coils by measuring impedance with and without a Galfenol rod present. It is
important to note that the same trick of parallel sections of windings per coil does not
work when attempting to reduce the overall inductance of a coil. The parallel sections
would share the same magnetic core and act as one inductor with a distributed wire cross
section. It can be imagined that the coil wire’s cross sectional area is split into smaller
wires, but the number of turns and total current still remains the same. This fact greatly
limited the AC magnetic field which could be generated.
The number of layers in each coil, along with the number of turns per layer was
simultaneously selected. Table 3-4 shows the combinations of parameters which were
Table 3-3: Incremental values of correction factor, K, for non- ideal solenoid inductance [13]
Radius/Length K 0 1
0.2 0.85 0.4 0.74 0.6 0.65 0.8 0.58 1.0 0.53 1.5 0.43 2.0 0.37 4.0 0.24 10.0 0.12

30
selected. The electrical impedance at 50 kHz was calculated from the coil inductance.
Resistive impedance was neglected due to the relatively short length of wire being used.
The coil length, l, was experimentally measured by wrapping the 20/36 AWG litz wire
and averaging several iterations. The maximum current was selected based on the
available channel settings of the AC amplifier. The calculation was done with the coil
pair driven in series. The AC magnetic field magnitude at 50 kHz was used as a
comparison point to choose the best coil parameter combination.
Based on the predicted values, it can be seen that the optimum AC coil design
could only reach slightly more than 1850 A/m in peak magnitude. This does not reach the
goal of 15 kA/m peak due to limitations in AC current generation. The final coil design
was chosen to be 60 turns per coil, with two layers of turns per coil. This was selected
because the required current was lower then for the 40 and 50 turn designs and still gave
similar results in magnetic field generation.
The coil mandrels were designed next. The dimensions were chosen such that the
AC coils fit inside the DC coils. A means for adjusting the coil spacing was incorporated
to account for deviation from the ideal spacing due to non ideal coil aspect ratios. The
Table 3-4: Possible AC coil parameters and corresponding predicted AC magnetic field magnitude with available power supply (79.578 A/m = 1Oe).
Turns Length Radius/Length K Inductance Zcoil@50kHz imax H [cm] [µH] [Ohm] [A] [A/m]
20.00 1.60 3.97 0.24 96.32 30.26 5.45 1228.2 30.00 2.54 2.50 0.34 190.33 59.79 3.85 1301.4 40.00 3.30 1.92 0.37 289.19 90.85 3.85 1734.8 50.00 3.81 1.67 0.39 409.00 128.49 3.3 1858.9 60.00 2.54 2.50 0.34 761.32 239.18 2.5 1690.2 80.00 3.30 1.92 0.37 1156.75 363.40 1.65 1487.3
100.00 3.81 1.67 0.39 1636.02 513.97 1.17 1318.4

31
DC coil spacing can be adjusted by moving and remounting them to the table. The AC
coils were attached to the DC coils using guide pins and a set of locking screws to allow
for spacing adjustments independent of the DC coils. The mandrels were machined out of
aluminum to withstand possible coil stresses from interactions in the generated magnetic
fields. The geometry was selected such that no radial dimension was larger then the
critical dimension for eddy currents, defined as
where eρ is the electrical resistivity, fc is the maximum frequency operation in kilohertz,
and t is the material thickness in millimeters. This was done by minimizing the cross
sectional area of the mandrel, and by cutting a slit in the mandrel to remove the
circumferential path for eddy currents.
The coil mandrels were covered in a layer of kapton tape to prevent arcing and
reduce the interwinding capacitance. Each layer of wire turns was also covered with a
layer of kapton tape. Figure 3-3 and Figure 3-4 show the finished drive coils. The AC
coils sit further inside the DC coils when the proper spacing between coil pairs is set.
cr
e
ft
µπρ
2
10
210
= 3-2

32
Figure 3-3: AC and DC helmholtz coils
AC Coils
DC Coils

33
The separation between coil pairs was determined experimentally. The magnetic
field at medium drive level was measured throughout the volume inside the Helmholtz
coils as the coil spacing was adjusted to yield the highest uniformity possible. It was
assumed that the variation in magnetic field throughout the coil volume is not a function
of drive level. Magnetic field was measured along the coil axis for varying DC and AC
coil spacing. Once the optimum spacing was found the coils were mounted to the test
bench. The magnetic field versus axial distance for the DC coils is shown in Figure 3-5.
The initial spacing of 8.89 cm (3.5 inch) from the center of each DC coil mass was too
small. As the coils were brought together the magnetic field tends to flatten and slightly
Figure 3-4: AC and DC helmholtz coils showing mandrel geometry

34
decrease in magnitude. A final spacing of 10.48 cm (4.125 in) was chosen to give
magnetic field profile close to that predicted for ideal Helmholtz coils.
The AC coils were initially spaced 6.35 cm (2.5 inch) apart, but this changed as
the DC coils were moved. This meant that the AC coils started out with spacing larger
than required. Magnetic field versus axial center was measured with a 1 kHz sine wave
input. The trend in magnetic field as a function of spacing for the AC coils can be seen in
Figure 3-6. As the spacing of the helmholtz coils approaches infinity, the measured
Figure 3-5: Measured DC axial magnetic field as a function of axial distance with 10 A DC input current showing the curve flattening as the coil spacing is increased (79.578 A/m = 1Oe).

35
magnetic field will be that of two separate coils. As the spacing approaches zero the
measured magnetic field will be that of a solenoid.
Initial test results for d, sH and µT and Qm were measured to be significantly lower
then previous methods showed. Demagnetization was discovered to be the root cause of
this issue. This caused the magnetic field seen by the sample in the experiment to be
significantly lower then was measured for the same drive current without the rod in place.
The initial calculation of the magnetostrictive parameters, ratios of strain to field and flux
Figure 3-6: Measured AC axial magnetic field as a function of axial distance with 1 kHz input current showing the curve flattening as the coil spacing is decreased (79.578 A/m = 1Oe).

36
to field, were done using the predicted magnetic field applied. The calculated value of d
and µ were artificially reduced because the actual field was lower then initially predicted.
A computer model of the magnetic field generated by the helmholtz coil apparatus
was created using finite element analysis. The FEMM software package is freely
available and is made specifically for analysis of electro-magnetic problems. The model
includes the coil geometry, number of turns and wire density of both the DC and AC coil
pairs. The magnetic field magnitude is simulated with and without the rod sample in
place. Figure 3-8 shows that the overall magnitude is significantly reduced along with the
field uniformity. The effects of demagnetization are reduced by placing rods of high
permeability on both ends of the rod sample. This increases the effective magnetic length
of the sample. The predicted magnetic field with the magnetic end-pieces is also plotted
below to show the improvement of nearly 6 kA/m in DC field.
A small metal stainless steel tab must be glued to one end of the rod allowing for
the laser vibrometer to measure the velocity of the rod end while maintaining alignment
of the rod and magnetic end-pieces. Figure 3-7 shows the configuration of this setup with
the laser beam depicted as a dashed line. Velocity measurements were made with the tab
glued to the sample rod to ensure that the tab could be assumed to be rigid. The velocity
at the rod center and tab tip were measured to be in phase and of equal magnitude.

37
Figure 3-7: Magnetic end-piece geometry with metal tab shown
-25
-20
-15
-10
-5
0
5
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
Axial Position [cm]
No
rmal
ized
Mag
net
ic F
ield
[kA
/m]
no rodrodrod & endpieces
Figure 3-8: Simulated magnetic field versus axial position generated by the DC helmholtz coil pair without the sample rod, with the rod and with the rod and magnetic end-pieces in place. Plotted magnitude is normalized to the field generated with no rod in place (79.578 A/m = 1Oe).
magnetic end-pieces
sample rod metal tab w/ reflective tape
36% 7%

38
From this analysis it can be seen that the desired uniformity in magnetic field was
not achieved. The average magnetic field in the rod is calculated to be 7% lower then the
simulated field with no rod in place. This percent reduction in magnetic field seen by the
sample was used as a first order approximation for the demagnetization factor. Figure 3-9
shows the final test fixture for holding the magnetostrictive sample with the magnetic
end-pieces and sense-coil in place. Onion skin paper was placed in the gap between the
rod and the magnetic end-pieces to simulate a zero force boundary condition.
3.3 Procedure
Applied magnetic field, magnetic induction, fundamental rod resonance, and
strain in the rod must be measured in order to calculate d, s, µ and Qm. Measurements
Figure 3-9: Fixture for holding magnetostrictive sample in place with magnetic end-pieces and sense-coil in place

39
were made as a function of DC bias and AC drive level. The relationships and equations
used to calculate the desired parameters will be described in this section.
The experimental procedure consists of three steps to capture the required data.
First, the DC bias is applied to the sample. There is a small amount of “ringing” which
occurs as the current is quickly increased in the DC coils. These decaying oscillations are
due to the coil inductance and capacitance interacting with the feedback loop of the DC
power supply. The DC bias is monitored using a current probe and set by the operator
manually. An AC field is then applied to the sample. The triggering of the AC excitation
is delayed by a few milliseconds to allow for the ringing in the DC coils to decay.
Figure 3-10 graphically represent the timing of the DC bias application and delay of the
AC drive. The AC excitation starts as a sine wave with a frequency far below resonance.
This ensures that the strain is uniform throughout the sample during measurement of
permeability and the magnetostrictive constant. The AC excitaiton then uses a sine sweep
which passes through the longitudinal resonance frequency of the rod sample being
measured to determine the exact resonance frequency and mechanical quality factor, Qm.

40
A block diagram is shown in Figure 3-11 which outlines the equipment used and the
signal path for the experiment.
Magnetic field is measured directly using a Lakeshore 475DSP axial hall probe.
The probe is mounted on an adjustable platform which allowed fo r axial and radial
positioning of the probe tip throughout the control volume. The hall probe measures flux
density perpendicular to the tip surface and outputs a proportional voltage. The magnetic
field can be determined using the permeability of free space.
Figure 3-10: Plot depicting timing of AC trigger delay as compensation for the DC bias current ramp up and overshoot

41
The magnetic induction in the rod sample is measured using a sense coil wrapped
around the center of the rod. Ten turns of 37 AWG wire were used. The resultant voltage
in the sense coil is recorded as a magnetic field is applied. Starting with Eq. 2-4 and
noting that
substitution leads to
An applied periodic magnetic field excitation will induce a voltage of the same
frequency, f, in the sense coil. Substituting and taking derivatives leads to a direct
Figure 3-11: Block diagram showing the equipment setup and signal flow for the measurement procedure.
T
T
HB
3
333 ∂
∂=µ , 3-3
T
T
tH
NAV∂
∂= 3
33µ . 3-4

42
calculation of permeability from the measured parameters. This relationship is expressed
as
where V is the induced voltage in the sense coil measured in volts, and H is the applied
magnetic field measured in A/m.
The axial velocity of the rod is measured using a laser-vibrometer. For a periodic
excitation,
where v is the measured velocity and x is the displacement of the rod end. The resultant
strain can be calculated using the relationship where
if the length of the sample, l, is known. An expression for d from the measured
parameters can be expressed by substituting into Eq. 2-7 as
where v3 and H3 are the magnitudes of the periodic velocity and magnetic field in the
axial direction. The coupling coefficient can be defined as [3]
HV
fNAT
πµ
21
33 = 3-5
fjv
xπ2
= 3-6
lx
strain2
= 3-7
THfl
vd
3
333
1π
= 3-8
HT sd
k3333
2332
33 µ= . 3-9

43
Woolett defines the longitudinal wave speed, c3, in a rod of magnetostrictive material to
be
where ρ is the density [12]. Using the relationship between sH and sB [3]
and the equation for the fundamental longitudinal resonance, fo, of a rod defined as
an equation for the magnetostrictive elastic constant based on measured parameters can
be written as
The fundamental resonance of the rod can be determined by observing the frequency at
which maximum displacement of the rod end occurs during the swept sine excitation. The
mechanical quality factor, Qm, can be calculated from the relationship
where f+ and f- are the frequencies above and below the resonance frequency where the
magnitude of the velocity spectrum is 3 dB less than the magnitude at resonance.
ρBsc
333
1= 3-10
)1( 2333333 kss HB −= 3-11
321
cl
f o = , 3-12
ρµ 2233
233
33 41
oT
H
fld
s += . 3-13
−+ −=
fff
Q om 3-14

44
3.4 Data Analysis
Input current, generated magnetic field, sense-coil voltage and velocity were
measured simultaneously. The measured signals are shown below for rod A at optimum
bias and low AC drive level.
-1
-0.5
0
0.5
1
0 10 20 30 40
Time [ms]
Cu
rren
t [A
]
Figure 3-12: 1 kHz sine wave input current as measured through the AC helmholtz coils.

45
-400
-300
-200
-100
0
100
200
300
400
0 10 20 30 40
Time [ms]
Mag
netic
Fie
ld [
A/m
]
Figure 3-13: Measured magnetic field generated from 1 kHz sine wave input current as shown in Figure 3-12 (1 Oe = 79.578 A/m).

46
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0 10 20 30 40
Time [ms]
Vo
ltag
e [V
]
Figure 3-14: Measured sense-coil voltage induced from magnetic field excitation shown in Figure 3-13.

47
During the initial testing procedure it was noted that a magnetic coupling exists
between the AC and DC coils. This coupling acts to reduce the amount of AC magnetic
field which can be generated by the apparatus. The DC coils are attached to a constant
voltage power supply, which acts as an electrical short circuit. The magnetic field
generated by the AC coils couples with the DC coils and induces a proportional current in
the DC coils which can flow unimpeded due to the short. This induced current flows in a
direction to oppose the change in magnetic flux, thus reducing the generated AC
magnetic field. Using a constant current DC amplifier would reduce this problem because
-1
-0.5
0
0.5
1
0 10 20 30 40
Time [ms]
Vel
oci
ty [
mm
/s]
Figure 3-15: Measured velocity induced from magnetic field excitation shown in Figure 3-13.

48
the load impedance acts like an open circuit of infinite impedance and would act to block
this induced current. Figure 3-16 and Figure 3-17 shows the impedance of the AC coils
with the DC coil leads left electrically open and closed respectively.
0
20
40
60
80
100
120
140
160
180
0 20000 40000 60000 80000 100000
Frequency [Hz]
|Z| [
Ohm
s]
0
10
20
30
40
50
60
70
80
Pha
se [
degr
ees]
Impedance MagnitudePhase
Figure 3-16: AC coil impedance magnitude measured with the DC coil leads left open-circuit

49
A second product of the magnetic coupling between the AC and DC coil pairs
was an effect on the generated magnetic field amplitude which is dependent on
frequency. A constant input current from 5 to 50 kHz results in a magnetic field of
increasing amplitude. This rise in magnetic field was approximately inversely
proportional to the rise in impedance of the AC coils. Therefore, a constant voltage sine
sweep was applied resulting in the current waveform shown in Figure 3-18. The
decreasing magnitude in the current drive offsets the increasing magnitude of the
generated magnetic field, leading to a generated magnetic field of nearly equal magnitude
through the entirety of the sine sweep.
0
200
400
600
800
1000
1200
0 20000 40000 60000 80000 100000
Frequency [Hz]
|Z| [
Ohm
s]
-60
-40
-20
0
20
40
60
80
100
Pha
se [
degr
ees]
Impedance MagnitudePhase
Figure 3-17: AC coil impedance magnitude measured with the DC coil leads left electrically short-circuit

50
Figure 3-19 shows the waveform of the sine swept magne tic field. The downward slope
is a product of the hall probe’s internal processing and filters. In AC detection mode the
internal hardware integrates the measured signal and this causes a constant field to
gradually reduce in time. The graphical scalloping just after 30 milliseconds is a product
of aliasing in the hall probes internal processing.
-1
-0.5
0
0.5
1
0 10 20 30 40
Time [ms]
Cur
rent
[A]
Figure 3-18: Measured sine sweep current as input through the AC helmholtz coils using a constant voltage input.

51
The measured velocity resulting from the applied frequency swept magnetic field
is shown in Figure 3-20. It can be seen that the velocity of the rod is mechanically
amplified by the fundamental longitudinal resonance of the rod.
-400
-300
-200
-100
0
100
200
300
0 10 20 30 40
Time [ms]
Mag
netic
Fie
ld [A
/m]
Figure 3-19: Resultant sine swept magnetic field as generated by the input current shown in Figure 3-18.

52
A computer program was written which imports the recorded 1 kHz sine pulse
waveforms and outputs the signal amplitude with appropriate conversions. The measured
velocity resulting from the 5 to 50 kHz sine sweep is also imported allowing for the
resonance frequency along with the 3 dB down points needed to calculate Qm. It should
be noted that the experimental procedure currently uses two separate pulses, a 1 kHz sine
wave and a sine sweep. These were initially done separately to allow for independent
control of each waveform. Combining these two pulses into a single input waveform
should be trivial and would lower test time in a manufacturing application.
-80
-60
-40
-20
0
20
40
60
80
0 10 20 30 40
Time [ms]
Vel
oci
ty [
mm
/s]
Figure 3-20: Measured velocity resulting from sine swept magnetic excitation shown in Figure 3-19.


Chapter 4
Results
4.1 Galfenol Samples
Measurements were made on three samples of Galfenol (18.4 at% Ga) in the
shape of a rod. The samples were produced using the Free Stand Zone Melt technique at
Etrema Products. The samples were stress annealed to 45 MPa. Each sample was then
sliced axially and glued back together with non-conductive epoxy to prevent eddy
currents. A lamination thickness of 0.04064 cm (0.016 inch) was chosen to prevent eddy
currents up to 50 kHz. The dimensions for each rod are shown below in Table 4-1.
Quasistatic measurements of d and µ were made at Etrema on the three provided
sample rods with a prestress of 2.275 MPa. Plots of strain and magnetic flux as a function
of magnetic field for all three rods are shown in Figure 4-1 and Figure 4-2 respectively.
Table 4-1: Diameter and length for each Galfenol sample
Diameter [cm] Length [cm]
Rod A 0.3175 4.722
Rod B 0.3175 4.684
Rod C 0.3175 4.702

55
Figure 4-1: Strain as a function of magnetic field measured at 1 Hz with a 2.275 MPa preload as measured by Etrema, Inc (79.578 A/m = 1 Oe).

56
The measurement technique used at Etrema, Inc. required the use of a preload.
The measurements were made with a minimum possible preload of 2.275 MPa and
averaged over several sweeps through magnetic and mechanical saturation. Maximum
reported material property values along with the corresponding optimum bias fields are
shown in Table 4-2.
Figure 4-2: Magnetic flux as a function of magnetic field measured at 1 Hz with a 2.275 MPa preload as measured by Etrema, Inc (79.578 A/m = 1 Oe).

57
4.2 Property Measurements vs DC Bias
Data was taken for a DC bias of 9.5 to 22 kA/m. This covered the entire linear
region of the strain versus field curve as shown in the quasistatic measurements made at
Etrema. Measurements were made with low AC drive level as a function of the DC bias.
The DC values were initially chosen based on quasistatic data and modified after initial
testing was done with this experiment. Eq. 3-5, 3-8, 3-13 and 3-14 are used with the
appropriate measurements to determine the desired parameters. Measured properties as a
function of DC bias are shown in the plots below. The magnetic field used to derive these
parameters was measured with no sample rod in place. The measured field was then
reduced by 7% to compensate for the demagnetization effects as previously discussed.
Figure 4-3 shows the measured relative permeability of the rods A, B and C as a
function of DC bias. The measurement shows that the optimum bias field is not identical
for each rod even though they are taken from the same batch. Figure 4-4 shows the
Table 4-2: Maximum values for d and µ with corresponding optimum bias fields measured at 1 Hz with a prestress of 2.275 MPa as measured at Etrema [14] (79.578 A/m = 1 Oe).
Rod max µr33 max µr33 Field max d33 max d33 Field
[kA/m] [m/A] [kA/m]
A 72 15.2 18.8E-9 15.2
B 67 16.3 17E-9 17.3
C 68 14.5 17.5E-9 14.5

58
magnetostrictive constant measured as a function of DC bias for the three galfenol
samples tested.
Figure 4-3: Relative permeability, µr, as a function of DC bias for rods A, B and C at low AC drive level of 430 A/m peak to peak (79.578 A/m = 1 Oe).

59
Figure 4-5 shows the elastic constant, s, measured as a function of DC bias.
Figure 4-4: Magnetostrictive cons tant, d, as a function of DC bias for rods A, B and C at low AC drive level of 430 A/m peak to peak (79.578 A/m = 1 Oe).

60
Figure 4-6 shows the mechanical quality factor, Qm, measured as a function of DC bias
for each rod. Figure 4-7 shows the resonance frequency of each rod measured as a
function of DC bias.
Figure 4-5: Elastic Constant as a function of DC bias for rods A, B and C at low AC drive level of 430 A/m peak to peak (79.578 A/m = 1 Oe).

61
Figure 4-6: Mechanical Quality Factor as a function of DC bias for rods A, B and C at low AC drive level of 430 A/m peak to peak (79.578 A/m = 1 Oe).

62
Figure 4-7: Fundamental longitudinal resonance frequency as a function of DC bias for rods A, B and C at low AC drive level of 430 A/m peak to peak (79.578 A/m = 1 Oe).

63
4.3 Measurements versus AC Drive Level
Optimum DC bias fields were selected based on the measurements in the previous
section. This bias was then applied while measurements were made as the AC drive level
was increased. Figure 4-8 shows the relative permeability at optimum DC bias as the AC
drive level is incrementally increased from 430 A/m to 2.15 kA/m peak to peak. This
measurement is also made for the magnetostrictive constant, elastic constant, mechanical
quality factor and resonance frequency and shown in Figure 4-9 through 4-12.
Figure 4-8: Measured relative permeability, µ33/µo, as a function of AC drive level for rods A, B and C at optimum magnetic bias (79.578 A/m = 1 Oe).

64
Figure 4-9: Measured magnetostrictive constant, d33, as a function of AC drive level for rods A, B and C at optimum magnetic bias (79.578 A/m = 1 Oe).

65
Figure 4-10: Measured elastic constant, s33, as a function of AC drive level for rods A, B and C at optimum magnetic bias (79.578 A/m = 1 Oe).

66
Figure 4-11: Measured mechanical quality factor, Qm, as a function of AC drive level for rods A, B and C at optimum magnetic bias (79.578 A/m = 1 Oe).

67
4.4 Uncertainty
The uncertainty was evaluated by repeating a single measurement and calculating
the mean value and standard deviation. This experiment was performed on the sense-coil
voltage, magnetic field, sine swept velocity and resonance frequency. Each measurement
was repeated 10 times on rod A. Table 4-3 shows a summary of this study.
Figure 4-12: Measured fundamental longitudinal resonance frequency, fr, as a function of AC drive level for rods A, B and C at optimum magnetic bias (79.578 A/m = 1 Oe).

68
The velocity measurement proved to have the highest amount of uncertainty.
Several factors contribute to this. The material sample tends to align itself with the
applied magnetic field as the DC bias is turned on. The force of this repositioning is
sensitive to the placement of the material sample in the center of the rods. This movement
of the rod oscillates until friction of the fixture causes the movement to decay and the rod
to center itself. Care was taken to build a fixture which supports the sample without
influencing its strain while maintaining a steady geometrical centering. A slight offset
from the center of the magnetic field will cause unwanted motion of the sample and
influence the measurement of velocity.
It should be noted that the measured property values at optimum bias in the study
as a function of DC bias did not match with the same measurement in the measurement as
a function of AC drive level. This discrepancy should be further investigated. It may be
due to a slight change in magnetic conversion of the Helmholtz coils from a change in
spacing or alignment.
Table 4-3: Mean and standard Deviations for 10 measurements of magnetic field, sense-coil voltage and velocity made on rod A
Measured Property Mean Standard Deviation %
Magnetic Field [kA/m] 1.397 0.0293 0.17
Sense-Coil Voltage [V] 0.1441 0.0011 0.76
Velocity [mm/s] 3.529 0.0308 0.87
Resonance Frequency [Hz] 29414 138.65 0.47

69
4.5 Property Discussion
The measurements of Galfenol’s material properties showed the basic trends of
magnetostrictive materials. It was shown that µ, d and s have a maximum value at a
specific DC magnetic bias field. The mechanical quality factor reaches a minimum value
at the optimum bias value. The mechanism behind this phenomenon should be further
investigated.
It is interesting to note that the optimum bias for permeability was not the same
for the three measured material samples. It can also be seen that for a single rod the
optimum bias for permeability is not always the same as the optimum bias for the
magnetostrictive constant. Looking at rod A, for example, we see that the permeability
reaches a maximum at 165 Oe whereas the magnetostrictive constant has a maximum at
about 175 Oe. These differences may be a result of the lamination process which occurs
after the samples are stress annealed.
The results also show that the fundamental longitudinal resonance frequency of
the Galfenol samples reached a minimum at optimum magnetic bias. This is important to
note when operating a magnetostrictive transducer which is designed to operate at a
specific frequency. This fact can be used in further experiments and transducer design to
quickly determine the optimum bias field at the desired drive level by tracking the
resonance frequency.
The trends in material properties were also tracked as the AC drive level is
increased. The permeability and elastic constant increase in magnitude as the AC drive
level is increased. It is assumed that the magnetostrictive constant also follows this trend,

70
but uncertainty in the velocity measurement hindered accurate results. It was also shown
that the resonance frequency is decreased as the magnetostrictive material is driven at
higher levels. A decrease by approximately 1 kHz was measured. Quantifying these
trends is important for transducer design and operation. Previous measurements were
made at low drive levels which could not predict the effects shown in this experiment.
The knowledge gained from this measurement would be greatly improved by increasing
the magnitutude of the AC drive level beyond what is currently capable with available
equipment. This would show a more general trend in the properties as a function of drive
level.
4.6 Transducer Measurements
The performance of the dual-rod transducer described in Section 1.6 was
measured. The transducer was tested in water with increasing drive level. A plot of
impedance as a function of frequency is shown in Figure 4-13. The transducer was driven
with constant voltage and the measured input current at resonance for each drive level
was converted to magnetic field. This measurement also shows the trend of the elastic
constant softening as the AC drive level is increased. The impedance of the transducer is
dominated by its inductance below resonance. The inductance is proportional to the slope
of the impedance at this point. The increasing slope with increasing drive level points to
the fact that permeability is also increasing as the drive level is increased.

71
A transducer was built using rod A to assess the validity of the results decribed in
Ch. 4. The transducer design consisted of a single rod of Galfenol and a high
permeability magnetic return path. The geometry is shown in Figure 4-14. The transducer
was designed to have a fundamental resonance well below the first plate mode resonance
of the head mass to avoid “flapping”. The head mass material is aluminum, the tail mass
material is made of stainless steel, and the magnetic return path is an iron composite
which has a high permeability and high resistivity to prevent eddy currents. The goal of
this transducer was only to compare the model using measured material properties and
the experimental performance. The transducer was not optimized for acoustic
50
150
250
350
450
550
650
750
5 10 15 20 25Frequency [kHz]
|Z|
[Ohm
s]
0.1 kA/m0.4 kA/m1 kA/m3.6 kA/m
Figure 4-13: Impedance magnitude of the dual- rod Galfenol transducer measured as a function of frequency for increasing drive level in water at optimum DC bias field (79.578 Oe = 1 A/m).

72
performance. The actual transducer is shown first in Figure 4-15 before the coil is wound
and the magnetic return path cylinder is attached. It is then pictured in Figure 4-16 in its
final state.
Figure 4-14: Galfenol transducer built to validate experimental results
Galfenol Rod
Tail Mass
Head Mass
Magnetic Return Path

73
Figure 4-15: Galfenol transducer without coil and magnetic return path cylinder
Figure 4-16: Final state of the Galfenol transducer as tested

74
A finite element computer model was created using the measured properties with
the goal of comparing measured and modeled performance. The model does not include
the glue joints between the Galfenol rod and the head and tail masses. The impedance of
the transducer was measured experimentally with a magnetic bias field of 14 kA/m and
an AC drive level of 1.4 kA/m. Figure 4-17 shows a comparison of the measured and
modeled impedance magnitude as a function of frequency.
The resonance frequency of the model is higher then the experimentally measured
value by 11 percent. This is an indication of the error in the measured value of the elastic
compliance used in the model. This error may be reduced by fixing the demagnetization
0
50
100
150
200
250
0 2000 4000 6000 8000 10000
Frequency [Hz]
Imp
edan
ce M
agn
itu
de
[Oh
ms]
ModeledMeasured
Figure 4-17: Measured (pink) and modeled (black) impedance magnitude as a function of frequency for the single rod Galfenol transducer in air at a DC bias of 14 kA/m and an AC drive level of 1.4 kA/m.

75
problems in the Helmholtz coil apparatus. Demagnetization causes the applied magnetic
field at the ends of the material sample to be lower in magnitude then the at the samples
center. This acts to reduce the length of material which is at the intended magnetic bias
and thus reduces the length of active material. An artificially reduced length would cause
the measured elastic compliance to appear greater in magnitude.
The model and measured slope of the impedance above resonance show a good
match. This shows that the permeability measured using the experiment in Chapter 4 is
valid. The coupling coefficient, defined in Eq. 3-9 can also be defined as
where fr is the resonance frequency and fa is the antiresonance frequency. Calculating the
experimentally measured coupling coefficient gives a value of 0.397. Calculating the
coupling coefficient of the model yields a value of 0.418. If we assume that the measured
values for permeability and elastic coefficient used in the model are accurate we can use
the coupling coefficient as a validation of the magnetostrictive constant measurement.
Comparing the coupling coefficients of the modeled and measured impedance shows that
the measured magnetostrictive coupling coefficient is relatively accurate.
The initial goal of this experiment was to accurately characterize Galfenol for
transducer design. The comparison of the measured and modeled impedance of the
transducer shows that the experimental method described in this thesis can measure the
permeability, magnetostrictive constant and elastic constant of Galfenol as a function of
DC magnetic bias and AC drive level.
2
2 1
−=
a
r
ff
k 4-1

Chapter 5
5.1 Conclusions
A magnetostrictive transducer was designed and tested in partnership with
Etrema, Inc. Initial attempts at predicting the transducer’s performance using finite
element analysis showed that more accurate measurements of the magnetostrictive
constant, d, elastic constant, s, permeability, µ, and mechanical quality factor, Qm, are
needed. Measurements of the transducer’s performance also showed that these properties
are nonlinear with drive level.
A method for measuring d, s, µ and Qm as a function of DC magnetic bias and AC
drive level was developed without a transducer- like apparatus used in previous methods.
The method is robust in allowable geometry and can be adapted for quality control in an
industrial setting. A matrix of Galfenol material properties was derived using this method
that will help to better understand the trends as a function of bias and drive level.
A transducer was built to validate the results of this work using one of the
Galfenol samples. A finite element model using the measured material properties showed
good correlation with the experimentally measured transducer performance. The
permeability measurement was shown to be accurate. An 11% difference between the
modeled and measured resonance frequency of the transducer shows that improvements

77
need to be made in measuring the elastic constant. This discrepancy is attributed to
demagnetization effects in the measurement procedure.
5.2 Future Work
In order to further improve the accuracy of the experiment a few improvements to
the technique can be made. Modifications to the magnetic end-pieces should be
investigated to improve the magnetic field magnitude throughout the sample. Deviations
from constant magnetic field throughout the volume of the material sample are a source
of error in all measurements made thus far.
Improvements in the AC power supply need to be addressed. The goal stated in
the design of the apparatus called for an AC drive level of 16 kA/m. A maximum of 21.5
kA/m AC drive level was reached with the available amplifiers. Increasing the drive level
capabilities will help further characterize the nonlinearities of the material properties as a
function of drive level.
A few steps can be adopted for use in a manufacturing environment. The 1 kHz
sine pulse and the sine sweep pulse should be combined into one waveform. Automating
the process of magnetic excitation, data collection and data processing can be done with
one of several commercial softare and hardware packages.

Bibliography
1 M. Velazquez, “Analysis of the Effective Coupling Coefficient of a Terfenol-D Tonpilz Transducer”, The Pennsylvania State University, 2005.
2 David Jiles. Introduction to Magnetism and Magnetic Materials. Chapman and Hall, 1991.
3. Goran Engdahl. Handbook of Giant Magnetostrictive Materials. Academic Press, 2000.
4. Frederick V. Hunt. Electroacoustics: The Analysis of Transduction, and its Historical Background. Acoustical Society of America, 1982.
5 R. Meyer, J. Slaughter, “Galfenol Transducer Technology”, Emes, Iowa, Etrema Products, October 5, 2005.
6 NDRC Summary Technical Report, Division 6, Volume 13, (1946), The Design and Construction of Magnetostrictive Transducers.
7. S. Meeks, R. Timme, Acoustic Resonance of a Rare Earth Iron Magnetostrictive Rod in the Presence of Large Eddy Currents, IEEE Transactions on Sonics and Ultrasonics, Vol. SU-27, No. 2, March 1980.
8. L. Faidley et al, Terfenol-D elasto-magnetic properties under varied operating conditions using hysteresis loop analysis, SPIE Symposium on Smart Structures, March 1998 Paper No. 3329-92.
9. R. Kellogg, A. Flatau, Blocked force investigation of a Terfenol-D transducer, SPIE Symposium on Smart Structures, March 1999, Paper No. 3668-19.
10. IEEE Standard on magnetostrictive materials: Piezomagnetic nomenclature, IEEE Std 319-1990, February 1991.
11. H. C. Oersted, Experiment on the effects of a current on the magnetic needle, Annals of Philosophy, 16, 1820.
12. R. Woollett, Sonar Transducer Fundamentals, Naval Underwater Systems Center, 1987.
13. F. Grover, Inductance Calculations: Working Formulas and Tables, Dover Publications, 1973.

79
14. Correspondence with Julie Slaughter and Eric Summers of Etrema, Inc. via telephone and email from October 2005 to December 2008