Embed Size (px)
Citation preview

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Robust stability and Performance
Topics: ([ author ] is supplementary source)
• Sensitivities and internal stability (Goodwin 5.1-5.4)
• Modeling Error and Model Uncertainty (Goodwin4.12-4.13, Doyle 4.1)
• Robust stability (Goodwin 5.7-5.10, Doyle 4.2)
• Robust performance (Doyle 4.3-4.4, Goodwin 5.9)
• Loop-shaping technique (Doyle 7.1) [We will coverthis only briefly]
• Innovation feedback and affine parameterizationapproach to tuning S and T (see Goodwin Chapters15, 16, 18.5-6 for details)
The following topic(s) are for your information:
• Performance limitation (Glad 7.3-7.4, Doyle 6.1-6.2,Goodwin [8.6],9.1-9.3)
M.E. University of Minnesota 137

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Nominal Sensitivity Functions
To(s) =
(Y (s)
Dm(s)=Y (s)
R(s)=
)Go(s)C(s)
1 +Go(s)C(s)(18)
So(s) =
(Y (s)
Do(s)=
)1
1 +Go(s)C(s)(19)
Sio(s) =
(Y (s)
Di(s)=
)Go(s)
1 +Go(s)C(s)(20)
Suo(s) =
(U(s)
Do(s)=
)C(s)
1 +Go(s)C(s)(21)
• To - Complementary sensitivity (goal: small fornoise, ≈ 1 for command following)
• So - Sensitivity (goal: small)
• Sio - Input disturbance sensitivity (goal: small)
• Suo - Control sensitivity (goal: small)
M.E. University of Minnesota 138

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Internal Stability
The nominal loop is internally stable if and only if alleight transfer functions below is stable:
(Yo(s)Uo(s)
)
=
(Go(s)C(s) Go(s) 1 −Go(s)C(s)
C(s) −Go(s)C(s) −C(s) −C(s)
)
1 +Go(s)C(s)
H(s)R(s)Di(s)Do(s)Dm(s)
Let C(s) = P (s)/L(s), and Go(s) = Bo(s)/Ao(s).
Proposition The system is internally stable if and onlyif the roots of the nominal closed loop characteristicequation
Ao(s)L(s) +Bo(s)P (s) = 0
all lie in the open left half plane.
M.E. University of Minnesota 139

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Example Consider
Go(s) =s
(s+ 4)(−s+ 2), C(s) =
−s+ 2
s
where pole-zero cancellations at s = 2 and s = 0occur.
Complementary sensitivity is stable:
To(s) = −Y (s)/Dm(s) =G(s)C(s)
1 +Go(s)C(s)=
1
s+ 5
Sensitivity is also stable:
S(s) = 1 − To(s) =s+ 4
s+ 5
However, control sensitivity is marginally stable:
Suo(s) =U(s)
Dm(s)=
C(s)
1 +Go(s)C(s)=
(−s+ 2)(s+ 4)
(s+ 5)s
And, input disturbance sensitivity is unstable:
Sio(s) =Y (s)
Di(s)=
s
(−s+ 2)(s+ 5)
M.E. University of Minnesota 140

ME8281 - Last updated: April 21, 2008 (c) Perry Li
• The effect of unstable pole at s = 2 shows up inSio as input disturbance will drive the output Y tobe unbounded. This effect is not observed by thecontroller as it is blocked by its zero.
• The effect of unstable pole at s = 0 shows up inthe control sensitivity so that output disturbance ormeasurement noise will drive the control output tobe unbounded. This effect is not observed at theoutput as it is blocked by the plant’s zero.
• Characteristic equation has unstable and marginallystable poles:
(−s+ 2)s+ (s+ 4)(−s+ 2)s = (−s+ 2)(s+ 5)s
predicting correctly that the system is NOTinternally stable.
M.E. University of Minnesota 141

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Modeling Error
For linear systems, if Go(s) is the nominal system, andthe actual system is G(s), then define:
• Additive uncertainty:
Gǫ(s) = G(s) −Go(s)
• Multiplicative uncertainty:
Go(s)G∆(s) = G(s) −Go(s)
or
G∆(s) =G(s) −Go(s)
Go(s)
M.E. University of Minnesota 142

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Example: Time delays - τ
The transfer function of time delay is e−τs. Since it isnot rational, one often models it as
e−τs ≈
(−τs+ 2k
τs+ 2k
)k
where k = 0, 1, 2, . . ..
The additive modeling error is:
Gǫ(s) = e−τs −
(−τs+ 2k
τs+ 2k
)k
The multiplicative modeling error is:
G∆(s) =
[
e−τs −
(−τs+ 2k
τs+ 2k
)k]
/
(−τs+ 2k
τs+ 2k
)k
.
M.E. University of Minnesota 143

ME8281 - Last updated: April 21, 2008 (c) Perry Li
10−2
10−1
100
101
102
10−10
10−8
10−6
10−4
10−2
100
102
ω rad/s
MM
E
Multiplicative Modeling error of approximation of various orders for 1s time delay
k=0k=1k=2k=3k=5
Other examples:
• Uncertain pole location:
1/(s+Am) → 1/(s+A) where A ∈ [A0, A1]
• Neglected (possibly structural) dynamics:
ω2n/(s
2 + 2ζωns+ ω2n) → 1.
• Neglected compressibility effect, etc...
M.E. University of Minnesota 144

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Robust Stability
Let Go(s) be the nominal plant. Consider a family ofplants characterized by:
P := {G(s) = (1 +Wu(s)∆(s))Go(s)}
where
• G∆(s) = Wu(s)∆(s) is the multiplicative modeluncertainty
• Wu(s) is a given stable uncertainty weightingfunction
• ∆(s) is the uncertainty itself, which is any stabletransfer function with |∆(jω)| < 1 for all ω ∈ ℜ.
The question of robust stability is whether a controllerdesigned for Go(s) also stabilizes the any plant G(s) ∈P . If so, we say that the controller provides robuststability.
M.E. University of Minnesota 145

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Robust Stability Theorem: Assume that thecontroller C(s) internally stabilizes the nominal plantGo(s). Suppose that G(s)C(s) and Go(s)C(s) havethe same number of unstable (openloop) poles on theopen right half plane. Then,
1. If |G∆(jω)| · |To(jω)| < 1 for all ω ∈ ℜ (in otherwords, ‖G∆ · To‖∞ < 1) then the controller C(s)internally stabilizes the perturbed plant G(s).
2. C(s) provides robust stability for the plant set P ifand only if
‖Wu · To‖∞ < 1 (22)
where To(s) is the complementary sensitivityfunction:
To(s) =Lo(s)
1 + Lo(s)where Lo(s) = Go(s)C(s).
Remark:
• ‖F‖∞ := supω∈ℜ|F (jω)| is the so called infinitynorm of the transfer function F (s).
• Every plant G(s) ∈ P corresponds to a G∆(s) thatsatisfies ‖G∆ · To‖∞ < 1. So the extra interestingaspect of robust stability condition is the necessity.
M.E. University of Minnesota 146

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Before we give a proof of this theorem, recall theNyquist theorem:
Nyquist Theorem: Suppose that L(s) has P unstablepoles on the open RHP. Then, the Nyquist plot (i.e.the plot of L(s) on the complex plane, as s traversesthe Nyquist contour (i.e. the imaginary axis, indentedto the right in case of poles of L(s) on the imaginaryaxis, and a half circle at infinity encircling the RHP),encircles the (−1, 0) point clockwise N = Z−P times,where Z is the number of unstable poles of the closedloop system:
L(s)
1 + L(s)
Corollary: The closed loop system is stable if and onlyif the Nyquist plot of L(s) encircles the (−1, 0) pointP times in the counter-clockwise direction.
This is obtained by setting Z = 0.
Note: P is the number of open-loop unstable poles.
M.E. University of Minnesota 147

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Return now to the robust stability theorem.
Notice that the perturbed plant lies in a family ofdisks of size |Lo(jω)Wu(jω)| centered at Lo(jω). Theperturbed plant is at a distance |G∆(jω)Lo(jω)| fromLo(jω).
Geometric interpretation: Since
|ToWu|s=jω = |Lo(jω)Wu(jω)|/|1 + Lo(jω)|
and 1 + Lo(jω) is the distance between (−1, 0) andLo(jω), |ToWu|s=jω < 1 if and only
|Lo(jω)Wu(jω)| < |1 + Lo(jω)|
Thus, the robust stability theorem states that thefamily of disks of size |Lo(jω)Wu(jω)| centered atLo(jω) should not contain the (−1, 0) point.
M.E. University of Minnesota 148

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Proof of Robust Stability:
Item 1 and sufficiency in item 2:
• Show that the number of encirclement of (-1, 0)does not change
• The distance from Lo(jω) to (−1, 0) is:
|1 + Lo(jω)|
• However, since
|To(jω)G∆(jω)| < 1 ⇒
∣∣∣∣
Lo(jω)
1 + Lo(jω)G∆(jω)
∣∣∣∣< 1
This implies that
|G∆(s)Lo(jω)| < |1 + Lo(jω)| = distance to (-1, 0)
Hence, the perturbed plant cannot reach (and hencechange the encirclement of) the (−1, 0) point.
• This is the case because if the perturbed plant doeschange the encirclement of (−1, 0) there wouldbe a β < 1 such that the perturbed plant (1 +βG∆(s))Lo(s) touches (−1, 0) at some s = jω1.
M.E. University of Minnesota 149

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Necessity in item 2:
• Suppose that ‖Wu · To‖∞ ≥ 1 (i.e. the robuststability condition not satisfied) hence,
|Wu(jω1) · To(jω1)| = γ1 ≥ 1
at some ω1.
• We need to construct a ∆(s) with ‖∆‖∞ < 1 suchthat, withG∆(s) = Wu(s)∆(s), (1+G∆(jω))Lo(s)touches the (−1, 0) point.
• To do this consider ∆(s) of the form:
∆(s) =±1
γ
(s− β)
(s+ β)
• Note that |∆(jω)| = 1/|γ| for all ω (i.e. all passfilter) so that:
∆(jω) =1
γejφ(β,ω)
where φ(β, ω) = π − 2tan−1(ω/β). Thus, for anyω, by choice of β, it is possible to achieve anyφ(β, ω) ∈ (0, π].
M.E. University of Minnesota 150

ME8281 - Last updated: April 21, 2008 (c) Perry Li
• Thus, we can choose γ = γ1 and β such that
1+Lo(jω1) =±1
γ1Wu(jω1)e
jφ(β,ω1) = Lo(jω1)G∆(jω1)
• This makes the perturbed Nyquist plot touch the(-1, 0) point.
QED.
Remarks:
• The perturbed closed loop system can be formulatedinto a closed loop system between G1(s) =G∆(s) = Wu(s)∆(s) and G2(s) = To(s).
• Sufficiency part of robust stability is a special caseof the Small Gain Theorem (SGT).
M.E. University of Minnesota 151

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Small Gain Theorem (SGT): Let G1 and G2 be(possibly nonlinear) stable systems with finite input-output gains. Let ‖G1‖ and ‖G2‖ denote theirrespective gains, i.e. their induced norms. If
‖G1‖ · ‖G2‖ < 1,
then the closed loop system consisting of G1 and G2
will also be stable.
Remarks: If we consider Gi : u(·) 7→ y(·) then, theinduced norm (gain) of Gi is defined to be:
‖Gi‖i := supu(·)
‖y(·)‖
‖u(·)‖
where ‖u(·)‖ and ‖y(·)‖ are the respective signal normsof the input and output. By using different signalnorms, different induced norms of the system can beobtained.
For linear systems, it turns out that ‖G‖∞ is theinduced 2-norm. i.e. the input and output aremeasured using the 2-norm:
‖u(·)‖2 =
(∫ ∞
−∞
u(t)2dt
)12
.
M.E. University of Minnesota 152

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Therefore, the sufficiency of (22) is exactly whatis provided by the Small Gain Theorem. What isinteresting for LTI systems is that (22) is also necessarycondition.
M.E. University of Minnesota 153

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Robust PerformanceWe assume that the performance is specified by thesmallness of the achieved sensitivity S(s).
S(s) =1
1 +G(s)C(s)=
1
1 + L(s)
Nominal performance:
‖WpSo‖∞ < 1; So(s) =1
1 + Lo(s)
where Lo(s) = Go(s)C(s), Wp(s) is the sensitivityperformance weight.
M.E. University of Minnesota 154

ME8281 - Last updated: April 21, 2008 (c) Perry Li
How to specify sensitivity weighting Wp ?
For example, output disturbance is
do = k + asin(ωt+ φ)
where
• DC disturbance: k ∈ [0, 10],
• AC disturbance: ω ∈ [2, 4]rads−1, a ≤ A.
If we would like the effect of disturbance to be smallerthan 1, then, we would choose |S(j0)| < 1/10 tosatisfy DC disturbance; and |S(jω)| < 1/A for ω ∈[2, 4]rads−1 to satisfy AC disturbance requirements.
Similar methodology can be used to specifyrequirements for Suo, Sio etc.
M.E. University of Minnesota 155

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Consider a family of plants characterized by:
P := {G(s) = (1 +Wu(s)∆(s))Go(s)}
• G∆(s) = Wu(s)∆(s) is the multiplicative modelerror
• Wu(s) is a given stable uncertainty weightingfunction
• ∆(s) is the uncertainty itself, which is any stabletransfer function with |∆(jω)| < 1 for all ω ∈ ℜ.
Perturbed sensitivity:
S(s) =1
1 + (1 +G∆)Lo(s)=
So
1 +G∆(s)To(s)
where To(s) = Lo(s)1+Lo(s)
.
We are interested in the controller C(s) stabilizing allplants in set P and also satisfying the performancespecification ‖WpS‖∞ < 1.
Robust performance means: ∀‖∆‖∞ < 1,
‖WuTo‖∞ < 1 and
∥∥∥∥
WpSo
1 + ∆WuTo
∥∥∥∥∞
< 1 (23)
M.E. University of Minnesota 156

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Theorem: A necessary and sufficient condition forrobust performance is:
‖|WpSo| + |WuTo|‖∞ < 1 (24)
Sketch of Proof:
Sufficency Suppose that (24) is satisfied.
• Clearly (23) implies that ‖WuTo‖∞ < 1
• We need only show that∥∥∥
WpSo
1+∆WuTo
∥∥∥∞< 1 for any
allowable ∆(s).
• Since |WpSo| + |WuTo| < 1, we have
∥∥∥∥
WpSo
1 − |WuTo|
∥∥∥∥∞
< 1
It is easy to see that for any ‖∆(s)‖∞ < 1,
∥∥∥∥
WpSo
1 − |WuTo|
∥∥∥∥∞
≥
∥∥∥∥
WpSo
1 + ∆|WuTo|
∥∥∥∥∞
M.E. University of Minnesota 157

ME8281 - Last updated: April 21, 2008 (c) Perry Li
(worst case with ‖∆‖∞ < 1 is for RHS to equalLHS) thus, we have
∥∥∥∥
WpSo
1 + ∆WuTo
∥∥∥∥∞
< 1
Necessity: Assume that (23) is true.
• Construct a ∆ such that
|WpSo|
1 − |WuTo|=
|WpSo|
1 + ∆WuTo
at the frequency where the LHS is maximized. Sincethe RHS < 1 by robust performance,
∥∥∥∥
WpSo
1 − |WuTo|
∥∥∥∥∞
< 1
and hence (24) is true.
M.E. University of Minnesota 158

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Geometric interpretation:The robust performance theorem states that at allω, disks of size |Lo(jω)Wu(jω)| centered at Lo(jω)should not intersect disk with radius |Wp(jω)| the(−1, 0) point.
This is because:
|Wp(jω)So(jω)| = |Wp(jω)|/|1 + Lo(jω)|
|Wu(jω)To(jω)| = |Wu(jω)Lo(jω)|/|1 + Lo(jω)|
Thus, ‖|WpSo| + |WuTo|‖∞ < 1 if and only if:
|Wp(jω)| + |Wu(jω)Lo(jω)| < |1 + Lo(jω)|
the latter is the distance between (−1, 0) and Lo(jω).
M.E. University of Minnesota 159

ME8281 - Last updated: April 21, 2008 (c) Perry Li
(−1, 0)
Lo(jw)
|Wp(jw)|
|Wu(jw)| |Lo(jw)|
M.E. University of Minnesota 160

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Robust performance can be achieved by robust stabilityand nominal performance
Proposition: If a controller provides
• Nominal performance ‖WpSo‖∞ < 1 for aperformance weighting Wp(s).
• Robust stability ‖WuTo‖∞ < 1 for an uncertaintyweighting Wu(s).
then the controller provides for robust performancew.r.t
‖|1
2WpSo| + |
1
2WuTo|‖∞ < 1.
i.e. when the performance requirement, anduncertainty requirements are halved.
Proof:
‖ |1
2WpSo|
︸ ︷︷ ︸<0.5
+ |1
2WuTo|
︸ ︷︷ ︸<0.5
‖∞ < ‖1
2+
1
2‖ ≤ 1 Q.E.D.
We can also run the argument backwards. To solvethe robust performance criteria for:
‖|W ′pSo| + |W ′
uTo|‖∞ < 1.
M.E. University of Minnesota 161

ME8281 - Last updated: April 21, 2008 (c) Perry Li
we can design a controller that satisfies
• Nominal performance with double requirement:‖(2W ′
p)So‖∞ < 1
• Robust stability with double uncertainty:‖(2Wu)T‖∞ < 1
Note: Other ratios are also possible. For example,0 < β < 1.
‖|βWpSo| + |(1 − β)WuTo|‖∞ < 1.
Choose β to be large or small depending on whichof performance or robust stability can be more easilysatisfied.
M.E. University of Minnesota 162

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Other Performance Specification?
Robust performance theorem is stated for performancein terms of S. What about other performancespecifications? e.g.
• Complementary sensitivity T (noise to output)
• Input-disturbance sensitivity Si
• Control sensitity Su (output disturbance tocontrol)?
Perturbed plant:
G(s) = (1 +G∆(s))Go(s); ‖∆(·)‖∞ < 1
Error sensitivity:
S∆(s) =1
1 + To(s)G∆(s)
Perturbed sensitivities in terms of nominal:
S(s) = So(s)S∆(s)
T (s) = To(s)(1 +G∆(s))S∆(s)
Si(s) = Sio(s)(1 +G∆(s))S∆(s)
Su(s) = Suo(s)S∆(s)
M.E. University of Minnesota 163

ME8281 - Last updated: April 21, 2008 (c) Perry Li
A Conservative Result:
• Design the nominal performance to be acceptable
• Try to ensure that achieved performances are similarto the nominal performance. This will be the caseif the error sensitivity
S∆(s) ≈ 1 + j0.
• This is the case if |To(jω)G∆(jω)| <<< 1.
• Hence, To(jω) should roll off before G∆(jω)becomes significant, or
|To(jω)Wu(jω)| <<< 1
Notice that this condition is similar, but morestringent than just robust stability. This resultmeans that to achieve robust performance whenperformance is specified using sensitivities that arenot S, one can design the nominal system to havegood performance, and then make sure that thecomplementary sensitivity has rolled off before theuncertainty becomes important.
M.E. University of Minnesota 164

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Servo-hydraulic Example
Consider a servo-valve controlled hydraulic actuatorwith precisely controlled flow rate.
Nominal model based on incompressible fluid is just anintegrator:
X(s)
U(s)= Go(s) =
1
s
where x(t) represents the displacement, and u(t) isthe flow rate (normalized by the piston area) into theactuator.
The fluid in the actual system has compressibility whichmanifests itself as:
mx+ bx+ kf(x− y) = 0;
y = u
This gives the transfer function from u to x to be:
⇒ G(s) =K
s(ms2 + bs+K)
M.E. University of Minnesota 165

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Thus, the multiplicative model error (MME) is:
G∆(s) =G(s) −Go(s)
Go(s)
=−(ms2 + bs)
m2 + bs+K=
−(s2 + 2ζwns)
s2 + 2ζwns+ w2n
wn and ζ depend on fluid compressibility which is highlyvariable due to aeration, dirt, temperature, additivesetc.
Uncertainty: wn ∈ [200, 500], ζ ∈ [0.1, 0.5].
Let us define bounds for uncertainty weights Wu(s)so that
|G∆(jω)| < |Wu(jω)|
This should ensure that for any allowable G∆(s), wecan write it as:
G∆(s) = Wu(s)∆(s);
for some ‖∆(s)‖ < 1.
M.E. University of Minnesota 166

ME8281 - Last updated: April 21, 2008 (c) Perry Li
10−3
10−2
10−1
100
101
102
103
104
10−10
10−8
10−6
10−4
10−2
100
102
104
Performance Weight − Wp
Wu = 9 s
s + 1200
Wu = 9 s (s+200)
(s + 1200)2
Wp = 100
(s + 20)5
Various G∆(s) and 2 definitions of Wu
M.E. University of Minnesota 167

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Since the bound of the uncertainty looks like a20dB/decade rise flattening out at about 1500 Hz,we first define
Wu =9s
s+ 1500The value 9 is chosen so that it bounds the uncertaintysufficiently. The bound is not very tight at low andhigh frequencies. This may cause performance to beconservative at low frequency.
Secondly try:
Wu =9s(s+ 200)
(s+ 1500)2
This is motivated by the desire to lower the size inlow frequency portion, and to introduce a boost atthe resonance frequency. Thus we added a lead-lag inthe weighting. This turns out to be adequate for lowfrequencies (at least for at least up to 1000 rad/s).
M.E. University of Minnesota 168

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Next we define the performance criteria. Thespecifications are:
• Bandwidth of ωc = 20 rad/s
• Output disturbance attenuation of 1/100 withinbandwidth.
Define performance weighting to be: wc = 20rad/s.
Wp(s) =100w5
c
(s+ wc)5
The “100” is used, so that we have the 1/100attenuation at D.C..
We used a high order filter to make sure that we don’ttry too hard to achieve any performance above thebandwidth wc.
The performance requirement is: for all ω,
|Wp(jω)S(jω)| < 1
where S is sensitivity function.
M.E. University of Minnesota 169

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Proportional control:
U(s) = K ∗ (R(s) −X(s))
Nominal complementary sensitivity and sensitivity:
To =K
s+K, So =
s
s+K.
Consider first nominal performance design.
Criteria is ‖So(s)Wp(s)‖ < 1.
After several iterations, this is achieved by K = 600.
10−1
100
101
102
103
104
10−10
10−8
10−6
10−4
10−2
100
102
Nominal Performance −WpS
K = 600 Nominal design:
WuT
WpS
Robust stability −WuT
Nominal sensitivity and nominal complementarysensitivity for K = 600
M.E. University of Minnesota 170

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Unfortunately, K = 600 does not provide for robuststability since ‖WuTo‖∞ > 1.
Next, we try different K’s and apply the robustperformance criterion:
‖|WuTo| + |WpSo|‖ < 1
M.E. University of Minnesota 171

ME8281 - Last updated: April 21, 2008 (c) Perry Li
K = 160
10−5
100
105
10−6
10−4
10−2
100
Sensitivity −S
10−5
100
105
10−6
10−4
10−2
100
Robust Stability −WuT
10−5
100
105
10−20
10−10
100
1010
Nominal Performance −WpS
10−5
100
105
10−4
10−2
100
102
Robust Performance −WpS + WuT
Proportional Control − K=160
K = 180
10−5
100
105
10−6
10−4
10−2
100
Sensitivity −S
10−5
100
105
10−6
10−4
10−2
100
Robust Stability −WuT
10−5
100
105
10−20
10−10
100
1010
Nominal Performance −WpS
10−5
100
105
10−4
10−2
100
102
Robust Performance −WpS + WuT
Proportional Control − K=180
M.E. University of Minnesota 172

ME8281 - Last updated: April 21, 2008 (c) Perry Li
K = 200
10−5
100
105
10−6
10−4
10−2
100
Sensitivity −S
10−5
100
105
10−6
10−4
10−2
100
102
Robust Stability −WuT
10−5
100
105
10−20
10−10
100
1010
Nominal Performance −WpS
10−5
100
105
10−4
10−2
100
102
Robust Performance −WpS + WuT
Proportional Control − K=200
K = 220
10−5
100
105
10−6
10−4
10−2
100
Sensitivity −S
10−5
100
105
10−6
10−4
10−2
100
102
Robust Stability −WuT
10−5
100
105
10−20
10−10
100
1010
Nominal Performance −WpS
10−5
100
105
10−4
10−2
100
102
Robust Performance −WpS + WuT
Proportional Control − K=220
M.E. University of Minnesota 173

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Gain - K ‖WuTo‖ ‖WpSo‖ ‖WuTo +WpSo‖160.0000 0.8670 3.4806 3.5330180.0000 0.9643 3.0948 3.1503200.0000 1.0581 2.7859 2.8437220.0000 1.1484 2.5330 2.5926240.0000 1.2350 2.3222 2.3831260.0000 1.3178 2.1437 2.2058280.0000 1.4071 1.9907 2.0537300.0000 1.4943 1.8581 1.9218
Conclusion: Proportional control cannot simultaneouslyprovide robust stability and performance.
Options:
• Reduce performance specification - e.g. reducebandwidth wc
• Reduce allowable size of uncertainties - e.g. bettersystem identification to nail down fluid / structurenatural frequency and damping ratio ωn, ζ, thusreducing Wu.
• Use a different type controller ⇒ loop shaping.
M.E. University of Minnesota 174

ME8281 - Last updated: April 21, 2008 (c) Perry Li
K = 180.
102
103
104
10−1
Robust Stability −WuT
100
101
102
10−4
10−2
100
Nominal Performance −WpS
K = 180
Sensitivity peaks at ≈ 15 rad/s whereas robust stabilitypeaks at 1500 rad/s.
Can we design a controller that only modifies thesensitivities around 5 to 50 rad/s, but have little effectat other frequencies?
M.E. University of Minnesota 175
ME8281 - Last updated: April 21, 2008 (c) Perry Li
Loop Shaping Principles
The robust performance control problem is essentiallya tradeoff between minimizing ‖WpSo‖ (performance)and ‖WuTo‖ (robustness). As we saw, at anyfrequency, either |Wp| or |Wu| must be less than 1.Typically, at low frequency, performance requirementis important and system uncertainty is low; and at highfrequency, the reverse is true. Thus,
• At low frequency, |Wp| >> 1 and |Wu| << 1.
• At high frequency |Wp| << 1 and |Wu| is large.
Thus intuitively, we solve |WpSo| < 1 at low frequency,and |WuTo| < 1 at high frequency.
Let Lo(s) = Go(s)C(s). These requirements translateto:
Low frequency (Wp dominates):
∣∣∣∣
Wp
1 + Lo
∣∣∣∣< 1 ⇐ |Lo| > |Wp|
M.E. University of Minnesota 176

ME8281 - Last updated: April 21, 2008 (c) Perry Li
High frequency (Wu >> 1 dominates):
∣∣∣∣
WuLo
1 + Lo
∣∣∣∣< 1 ⇐ |Lo| <
1
|Wu|
This provides some guidelines for designing Lo(s) tosatisfy robust performance.
To be more precise, we need to find bounds based onthe robust performance criterion itself.
We consider the cases of 1) when |Wp| < 1 (highfrequency) and 2) when |Wu| < 1 (low frequency) anddetermine the necessary and sufficient conditions forrobust performance.
Case 1: |Wp| < 1: (High frequency - uncertainty isimportant)
• Sufficient condition:
|Lo| <1 − |Wp|
1 + |Wu|⇒ |WpSo| + |WuTo| < 1.
• Necessary condition:
|Lo| <1 − |Wp|
|Wu| − 1⇐ |WpSo| + |WuTo| < 1.
M.E. University of Minnesota 177

ME8281 - Last updated: April 21, 2008 (c) Perry Li
• If |Wu| >> 1, both conditions approach,
|Lo| <1 − |Wp|
|Wu|(25)
Case 2: |Wu| < 1: (Low frequency - performance isimportant)
• Sufficient condition:
|Lo| >|Wp| + 1
1 − |Wu|⇒ |WpSo| + |WuTo| < 1.
• Necessary condition:
|Lo| >|Wp| − 1
1 − |Wu|⇐ |WpSo| + |WuTo| < 1.
• If |Wp| >> 1, both conditions approach,
|Lo| >|Wp|
1 − |Wu|(26)
These bounds (25)-(26) determine the design rule forLo(s) = C(s)Go(s).
M.E. University of Minnesota 178

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Loop Shaping Procedure
Setup:
• Open loop plant G(s) is stable, and minimum phase(no RHP zeros)
• Wu(s) and Wp(s) are designed such that
min{|Wu(jω)|, |Wp(jω)|} < 1, ∀ω
Procedure:
1. Plot on log-log sacle, magnitude versus frequency(25)-(26):
• At frequencies where |Wp| > 1 > |Wu| (lowfrequencies):
|Wp|
1 − |Wu|,
• At frequencies where |Wu| > 1 > |Wp| (highfrequencies):
1 − |Wp|
|Wu|
M.E. University of Minnesota 179

ME8281 - Last updated: April 21, 2008 (c) Perry Li
2. Construct Lo(s) = Go(s)C(s) such that |Lo(jω)|within the required bounds
• |Lo| > low frequency bound• |Lo| < high frequency bound
3. Choose Lo(s) such that at Lo(jω) passes through|Lo(jω)| = 1 with gentle slope (-20db/decade or-40dB/decade). This determines the phase margin.
4. Roll off Lo(s) (at least) as fast as Go(s) so thatC(s) is proper.
5. Check robust performance - |WpSo|+|WuTo| < 1.
6. Check nominal stability: roots of 1 + Lo(s) = 0should lie on open LHP.
7. Determine C(s) from the Lo(s).
M.E. University of Minnesota 180

ME8281 - Last updated: April 21, 2008 (c) Perry Li
One possibility is to construct a nice looking Lo(s)first, and then take
C(s) = Lo(s)/Go(s)
Another possibility is to start with L0o(s) = kG(s) and
then successively modify,
L1o(s) = kGo(s) → L2
o(s) = kC1(s)Go(s)
→L3o(s) = kC2(s)C1(s)Go(s) → . . .
where Ci(s) are typically lead-lag controller,
Ci(s) =βi
αi
(s+ αi)
s+ βi.
The controller is then
C(s) = kCm(s)Cm−1(s) . . . C1(s).
Cross-over region can be tricky to ensure robustperformance is achieved.
M.E. University of Minnesota 181

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Loop shaping example: EH actuator
Recall that using proportional control, it is not possibleto have both adequate performance and robustness atthe same time. However, for C(s) = K = 180,
• Performance curve |WpSo| peaks at 10 − 15 rad/s
• Robust stability |WuTo| peaks at 1500 rad/s withadequate margin.
Thus, it seems feasible that if we can improve |WpSo|at around 10-15 rad/s without disturbing |WuTo| athigh frequencies too much, robust performane can beachieved.
We use loop shaping techniques to guide us.
M.E. University of Minnesota 182
ME8281 - Last updated: April 21, 2008 (c) Perry Li
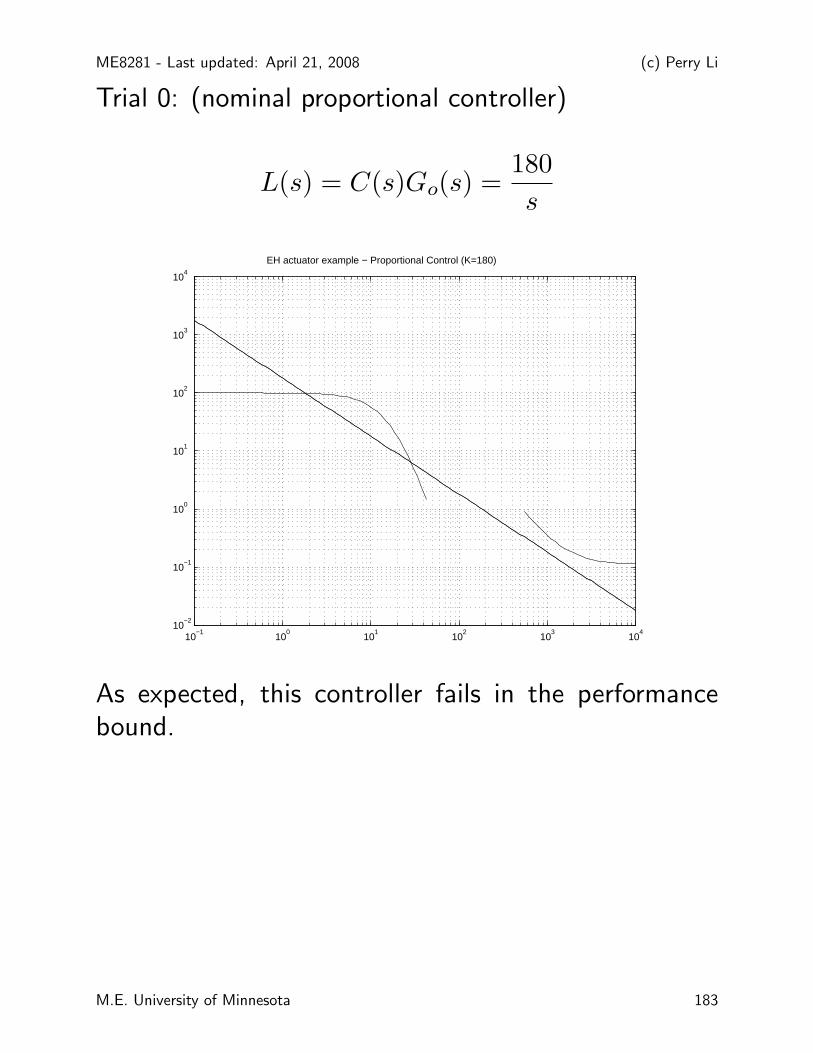
Trial 0: (nominal proportional controller)
L(s) = C(s)Go(s) =180
s
10−1
100
101
102
103
104
10−2
10−1
100
101
102
103
104
EH actuator example − Proportional Control (K=180)
As expected, this controller fails in the performancebound.
M.E. University of Minnesota 183

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Trial 1: Boost gain between 1 to 10 rad/s
Lo(s) = 180s+ 1
(s/10 + 1)Go(s) = 180
s+ 1
s(s/10 + 1)
10−1
100
101
102
103
104
10−2
10−1
100
101
102
103
104
EH actuator example − Proportional + lead
Performance bound is satisfied at the expense ofviolating the robustness bound. This is verifiedby plotting the robustness stability and performancecurves.
M.E. University of Minnesota 184

ME8281 - Last updated: April 21, 2008 (c) Perry Li
10−2
100
102
104
10−4
10−3
10−2
10−1
100
Sensitivity −S
10−2
100
102
104
10−6
10−4
10−2
100
102
Robust Stability −WuT
10−2
100
102
104
10−15
10−10
10−5
100
Nominal Performance −WpS
10−2
100
102
104
10−2
10−1
100
101
Robust Performance −WpS + WuT
Robust stability, nominal performance, robustperformance curves for
C(s) = 180s+ 1
s/10 + 1
M.E. University of Minnesota 185

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Trial 2: Reduce gain at high frequency to regainrobustness
Lo(s) = 180s/100 + 1
(s/10 + 1)·
s+ 1
s/10 + 1Go(s)
= 180s/100 + 1
s(s/10 + 1)2
10−1
100
101
102
103
104
10−2
10−1
100
101
102
103
104
Trial 0
Trial 1
Trial 2
Both performance and robustness bounds are satisfied.Need to check robust performance curve.
M.E. University of Minnesota 186

ME8281 - Last updated: April 21, 2008 (c) Perry Li
10−2
100
102
104
10−4
10−3
10−2
10−1
100
Sensitivity −S
10−2
100
102
104
10−5
100
Robust Stability −WuT
10−2
100
102
104
10−15
10−10
10−5
100
Nominal Performance −WpS
10−2
100
102
104
10−2
10−1
100
Robust Performance −WpS + WuT
Robust stability, nominal performance, robustperformance curves for
C(s) = 180(s+ 1)(s/100 + 1)
(s/10 + 1)2
Robust performance is satisfied.
Make sure to check that the system is nominally stable.
M.E. University of Minnesota 187

ME8281 - Last updated: April 21, 2008 (c) Perry Li
The characteristic polynomial is:
180(s+ 1)(s/100 + 1) + s(s/10 + 1)2
Roots are: −99.5 ± 90.5j and −0.996. Thus thesystem is stable.
Nyquist plot confirms that the nominal loop is stable.Thus, by robust stability, the system is robustly stableas well.
−1.2 −1 −0.8 −0.6 −0.4 −0.2 0
−20
−15
−10
−5
0
5
10
Nyquist Diagram
Real Axis
Imag
inar
y A
xis
M.E. University of Minnesota 188

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Control design via innovation feedback
Recall that using observer state feedback,
˙x = Ax+Bu− L(Cx− y)
u = −Kx
the controller itself satisfies [See Goodwin pp. 512 forproof]:
L(s)
E(s)U(s) = −
P (s)
E(s)Y (s) + V (s) (27)
where
L(s)
E(s)= 1 +KT1(s) =
det(sI −A+ LC +BK)
E(s)
P (s)
E(s)= KT2(s) =
KAdj(sI −A)J
E(s)
P (s)
L(s)= K(sI −A+ LC +BK)−1L
M.E. University of Minnesota 189

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Controller can be written as a two degree of freedomcontroller form:
U(s) =E(s)
L(s)
(
V (s) −P (s)
E(s)Y (s)
)
Or as a 1 degree of freedom controller form:
U(s) =P (s)
E(s)(R(s) − Y (s))
where V (s) = P (s)E(s)R(s).
The innovation is the output prediction error:
ν := y − Cx = −Ce
Therefore,
ν(s) = Y (s) − CX(s)
= Y (s) − CT1(s)U(s) − CT2(s)Y (s)
= (1 − CTs(s))Y (s) − CT1(s)U(s)
where
T1(s) = (sI −A+ LC)−1B
T2(s) = (sI −A+ LC)−1L
M.E. University of Minnesota 190

ME8281 - Last updated: April 21, 2008 (c) Perry Li
In transfer function form:
L(s)
E(s)U(s) = −
P (s)
E(s)Y (s)
G(s) =Bo(s)
Ao(s)=CAdj(sI −A)B
det(sI −A)
E(s) = det(sI −A+ LC)
F (s) = det(sI −A+BK)
L(s) = det(sI −A+ LC +BK)
P (s) = KAdj(sI −A)L
P (s)
L(s)= K [sI −A+ LC +BK]
−1L
Then, it can be shown (see Goodwin P545) that theinnovation
ν(s) =Ao(s)
E(s)Y (s) −
Bo(s)
E(s)U(s)
Consider now that observer state feedback augmented
M.E. University of Minnesota 191

ME8281 - Last updated: April 21, 2008 (c) Perry Li
with innovation feedback,
u = v −Kx−Qu(s)ν
where Qu(s)ν is ν filtered by the stable filter Qu(s)(to be designed). Then,
L(s)
E(s)U(s) = −
P (s)
E(s)Y (s)+Qu(s)
[B(s)
E(s)U(s) −
A(s)
E(s)Y (s)
]
The controller transfer function becomes then:
C(s) =
P (s)E(s) +Qu(s)A(s)
E(s)
L(s)E(s) −Qu(s)B(s)
E(s)
The nominal sensitivity functions, which define therobustness and performance criteria, are modifiedaffinely by Qu(s):
So(s) =Ao(s)L(s)
E(s)F (s)−Qu(s)
Bo(s)Ao(s)
E(s)F (s)(28)
To(s) =Bo(s)P (s)
E(s)F (s)+Qu(s)
Bo(s)Ao(s)
E(s)F (s)(29)
M.E. University of Minnesota 192

ME8281 - Last updated: April 21, 2008 (c) Perry Li
For plants that are open-loop stable with tolerable polelocations, we can set K = 0 so that
F (s) = Ao(s)
L(s) = E(s)
P (s) = 0
so that
So(s) = 1 −Qu(s)Bo(s)
E(s)
To(s) = Qu(s)Bo(s)
E(s)
In this case, it is common to use Q(s) := Qu(s)Ao(s)E(s)
to get the formulae:
So(s) = 1 −Q(s)Go(s) (30)
To(s) = Q(s)Go(s) (31)
Thus the design of Qu(s) (or Q(s)) can be used todirectly influence the sensitivity functions.
M.E. University of Minnesota 193

ME8281 - Last updated: April 21, 2008 (c) Perry Li
For instance, using Eqs.(28)-(29):
Minimize sensitivity ‖Wp(s)S(s)‖ for nominalperformance:
Qu(s) =L(s)
Bo(s)F1(s)
Minimize complementary sensitivity ‖Wu(s)T (s)‖:
Qu(s) = −P(s)
Ao(s)F2(s)
where F1(s), F2(s) are close to 1 at frequencies where‖S(s)‖ and ‖T (s)‖ need to be decreased.
Similarly, using Eqs.(30)-(31) for stable open loopsystems:
Minimize sensitivity ‖Wp(s)S(s)‖ for nominalperformance:
Q(s) = G−1o (s)F1(s)
Minimize complementary sensitivity ‖Wu(s)T (s)‖:
Qu(s) = −G−1o F2(s)
M.E. University of Minnesota 194

ME8281 - Last updated: April 21, 2008 (c) Perry Li
where F1(s), F2(s) are close to 1 at frequencies where‖S(s)‖ and ‖T (s)‖ need to be decreased. Notice thatit is not possible to do both at the same time.
Remarks:
• Generally, if F1(s) and F2(s) need to be active inoverlapping ranges, then the control design will notbe feasible.
• The internal stability of the system is ensured ifQu(s) is stable.
• How Qu(s) should be designed need to be modifiedin case when Bo(s) or Ao(s) are non-minimumphase.
M.E. University of Minnesota 195

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Electrohydraulic Actuator Example using
Qu(s) feedback
Simplified model for the EH system,
G(s) =Bo(s)
Ao(s)=
1
s
States space model:
x = u+ di
y = x+ do
where di and do are input and output disturbances.
The observer is:
˙x = u− L(x− y)
(s+ L)x(s) = u(s) + Ly(s)
M.E. University of Minnesota 196

ME8281 - Last updated: April 21, 2008 (c) Perry Li
The innovation ν is:
ν = y − y = y − x
ν(s) = y(s) −u+ Ly
s+ L
=s · y(s)
s+ L−
u(s)
s+ L
Let the observer state-feedback with innovationfeedback be:
u(s) = −Kx(s) −Qu(s)ν(s)
[(s+K + L) −Qu(s)]u(s) = −(KL+Qu(s)s)y(s)
So(s) =y(s)
do(s)=
s(s+K + L)
(s+ L)(s+K)−Qu(s)
s
(s+ L)(s+K)
To(s) =u(s)
di(s)=
KL
(s+K)(s+ L)+Qu(s)
s
(s+ L)(s+K)
This is consistent with the formulae (28)-(29) with
M.E. University of Minnesota 197

ME8281 - Last updated: April 21, 2008 (c) Perry Li
these definitions:
E(s) = s+ L
F (s) = s+K
L(s) = (s+ L+K)
P (s) = LK
First we consider K = 180. Without Qu(s) feedback,this is robustly stable, but does not have the requiredperformance.
10−2
100
102
104
10−15
10−10
10−5
100
105
Nominal Performance
10−2
100
102
104
10−5
100
Robust stability
10−2
100
102
104
10−3
10−2
10−1
100
101
Robust performance
0
0.5
1
Mag
nitu
de (
dB)
100
101
0
0.5
1
Pha
se (
deg)
Bode Diagram
Frequency (rad/sec)
To improve nominal performance, we focus onfrequency below 200 rad/s:
M.E. University of Minnesota 198

ME8281 - Last updated: April 21, 2008 (c) Perry Li
>> wc1=200;
>> [B1,A1]=butter(2,wc1,’s’);
Q(s) =(s+ L+K) ∗B1(s)
A1(s)
10−2
100
102
104
10−15
10−10
10−5
100
Nominal Performance
10−2
100
102
104
10−5
100
Robust stability
10−2
100
102
104
10−5
100
Robust performance
−50
0
50
100
Mag
nitu
de (
dB)
101
102
103
104
105
−180
−90
0
Pha
se (
deg)
Bode Diagram
Frequency (rad/sec)
This satisfies the robust performance criteria easily.
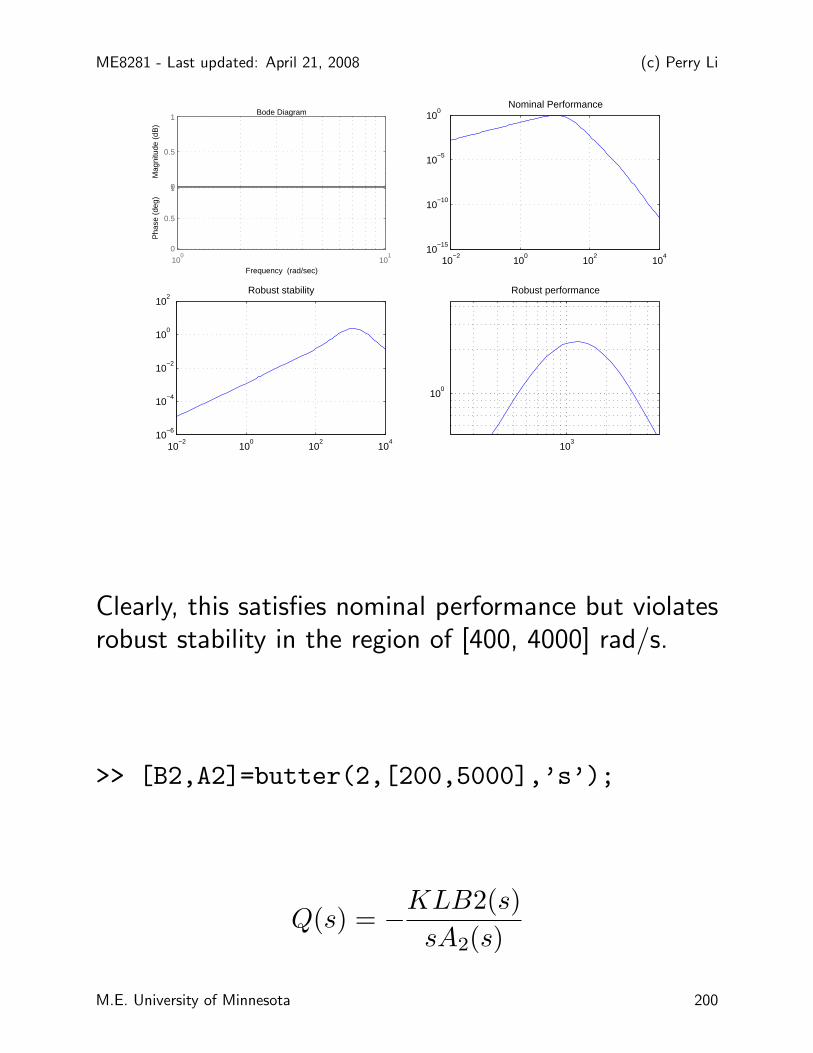
Let’s try starting out with performance. SetK = 1200.Without Qu(s), do not satisfy robust stability.
M.E. University of Minnesota 199
ME8281 - Last updated: April 21, 2008 (c) Perry Li
10−2
100
102
104
10−15
10−10
10−5
100
Nominal Performance
10−2
100
102
104
10−6
10−4
10−2
100
102
Robust stability
103
100
Robust performance
0
0.5
1
Mag
nitu
de (
dB)
100
101
0
0.5
1
Pha
se (
deg)
Bode Diagram
Frequency (rad/sec)
Clearly, this satisfies nominal performance but violatesrobust stability in the region of [400, 4000] rad/s.
>> [B2,A2]=butter(2,[200,5000],’s’);
Q(s) = −KLB2(s)
sA2(s)
M.E. University of Minnesota 200

ME8281 - Last updated: April 21, 2008 (c) Perry Li
10−2
100
102
104
10−15
10−10
10−5
100
Nominal Performance
10−2
100
102
104
10−5
100
Robust stability
10−2
100
102
104
10−3
10−2
10−1
100
Robust performance
−100
−50
0
50
100
Mag
nitu
de (
dB)
100
102
104
106
−360
0
360
Pha
se (
deg)
Bode Diagram
Frequency (rad/sec)
This also satisfies robust performance!
M.E. University of Minnesota 201

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Constraints on Wp and Wu
Wp(s) and Wu(s) specify the desired performance andallowable model uncertainties.
However, we cannot define Wp and Wu to be arbitrarilylarge and expect that that a controller can be foundthat solves the the robust performance problem. Here,we show that they must respect each other, and respectthe limitations of the open-loop system.
Knowledge of these limitations help us definemeaningful performance specifications (Wp), and ourneed to do accurate modeling (Wu).
First, some preliminary results ....
M.E. University of Minnesota 202
ME8281 - Last updated: April 21, 2008 (c) Perry Li
Preliminary Results
Maximum Modulus Theorem (MMT)
Let P (s) be a stable, rational transfer function. Then,
‖P‖∞ := supω∈ℜ|P (jω)| = sups with Re(s) ≥ 0 |P (s)|
It is obvious that LHS is less than or equal to the RHS.The interesting part of this theorem is that they areequal.
Consider L(s) = G(s)C(s). Let p be any pole ofL(s) and z be any zero of L(s), i.e. 1/L(p) = 0 andL(z) = 0. We have:
S(p) =1
1 + L(s)
∣∣∣∣s=p
= 0; T (p) = 1 − S(p) = 1;
T (z) =L(s)
1 + L(s)
∣∣∣∣s=z
= 0; S(z) = 1 − T (z) = 1;
M.E. University of Minnesota 203

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Constraint 1: Wu & Wp cannot simultaneously belarge
For the robust performance to be solvable, a necessarycondition is: for all ω ∈ ℜ,
min{|Wu(jω)| , |Wp(jω)|} < 1.
Proof: Suppose that |Wu| ≤ |Wp| (reverse theargument otherwise). At each ω,
|Wu| = |Wu(S+T )| ≤ |WuS|+|WuT | ≤ |WuS|+|WpT |
Thus, |WuS|+|WpT | < 1 (robust performance) impliesthat |Wu| < 1.
Significance: We cannot simultaneously tolerateuncertainty, and expect good performance at anyfrequencies.
• One cannot have better than open-loop performance(|S| < 1 as guranteed by |WpS| ≤ 1 and |Wp| > 1)when uncertainty is larger than 100% (|Wu| > 1).
M.E. University of Minnesota 204

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Constraint 2: Right Half Plane poles and zeros limitrobustness (Wu) and performance (Wp)
Suppose that C(s) internally stabilizes the nominalplant Go(s). Let So and To be the nominal sensitivities,and p and z are respectively an unstable pole, and anon-minimum phase zero of Lo(s) = Go(s)C(s), i.e.1/Lo(p) = 0 with Re(p) ≥ 0; and Lo(z) = 0 withRe(z) ≥ 0.
• The nominal (and robust) performance problemcannot be solved if |Wp(z)| ≥ 1, since
‖WpSo‖ = supRe(s)≥0|WpSo|
≥ |Wp(z)So(z)| = |Wp(z)|.
• The robust stability (and robust performance)problem cannot be solved if |Wu(p)| ≥ 1, since
‖WuTo‖ = supRe(s)≥0|WuTo|
≥ |Wu(p)To(p)| = |Wu(p)|.
The remedy for this is to reduce performancerequirement (smaller |Wp(z)|), and better systemidentification (lower uncertainty, and smaller |Wu(p)|).
M.E. University of Minnesota 205

ME8281 - Last updated: April 21, 2008 (c) Perry Li
The problem is more acute if there is a pair of RHPpole and zero close to each other.
Consider the open loop system:
G(s) =s− z
s− pG1(s)
where z and p are RHP zero and pole, G1(s) does nothave any RHP poles or zeros. Then, it can be shownthat:
‖WpSo‖∞ ≥ |Wp(z)|
∣∣∣∣
z + p
z − p
∣∣∣∣
‖WuTo‖∞ ≥ |Wu(p)|
∣∣∣∣
z + p
z − p
∣∣∣∣
Thus, as p ≈ z, the lower bounds for ‖WpS‖∞ and‖WuT‖∞ is significantly amplified. This is related tothe fact that the unstable pole is nearly canceled out bythe non-minimum phase zero. Thus, the unstable modebecomes either nearly uncontrollable or unobservable.
M.E. University of Minnesota 206

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Constraints due to Bode IntegralThese constraints are sometimes referred to as the“principle of conservation of dirts” or the area formula.The general meaning is that for systems that satisfy theconditions of the theorems, it is not possible to improvethe performance / robustness at all frequencies.
Theorem: (Bode Integral Theorem for Sensitivity)Let the open loop system L(s) = G(s)C(s) have thefollowing properties:
• It has relative degree (i.e. order of denominatorminus order of numerator) nr ≥ 1.
• L(s) has M ≥ 0 RHP (unstable) poles (countingmultiplicity): p1, p2, . . . , pM , Re(pi) > 0.
• Let κ := lims→∞sL(s). [Note: κ = 0 if nr ≥ 2]
• Sensitivity function is given by S(s) = 11+L(s).
Then, the sensitivity function S(jω) satisfies:
∫ ∞
0
ln|S(jω)|dω = π ·
M∑
i=1
Re(pi). nr > 1 (32)
∫ ∞
0
ln|S(jω)|dω = −κπ
2+ π ·
M∑
i=1
Re(pi). nr = 1.
(33)
M.E. University of Minnesota 207

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Significance:
• L(s) has relative degree nr > 1 if both plant G(s)and controller C(s) are strictly proper. Then, (32)applies.
• Decreasing |S(jω)| at some frequencies ω willincrease it at other frequencies. Hence, the “dirt”is conserved.
• The total amount of “dirt” is increased if the open-loop system L(s) is unstable since the RHS of(32)-(33) is increased.
• When nr = 1, the total amount of “dirt” isdecreased by increasing the high frequency gain(e.g. L(s) = K/s).
• The sensitivity peak ‖S‖∞ which is inversely relatedto robustness may be increased.
M.E. University of Minnesota 208

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Example: Proportional control of 2nd order plant withno zeros.
L(s) = kG(s) =k
s2 + s+ 1;
S(s) =s2 + s+ 1
s2 + s+ (1 + k)
0 1 2 3 4 5 6 7 8 9 1010
−2
10−1
100
101
k=0
k=10
log S(jw)
L(s) = k 1
s2 + s + 1
ω rad/s
Note that as k increases, the sensitivity at lowfrequencies decreases but the peaks increase at otherfrequencies.
M.E. University of Minnesota 209

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Theorem: (Bode Integral Theorem for ComplementarySensitivity) Let the open loop system L(s) = G(s)C(s)have the following properties:
• L(s) has at least 1 pole at 0 (i.e. L−1(0) = 0 orT (0) = 1).
• L(s) has M ≥ 0 RHP (non-minimum phase) zeros(counting multiplicity): c1, c2, . . . , cM , Re(ci) > 0.
• kv is the velocity constant - i.e.
kv = −
(
lims→0dT (s)
ds
)−1
= −lims→0sL(s)
• Complementary sensitity is given by T (s) = L(s)1+L(s).
Then, the sensitivity function T (jω) satisfies:
∫ ∞
0
1
ω2ln|T (jω)|dω = π ·
M∑
i=1
1
ci−
π
2kv(34)
M.E. University of Minnesota 210

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Significance:
• If L(s) has at least 2 free integrators (poles at 0),then kv = ∞. This ensures that steady error is 0for ramp input.
• Decreasing |T (jω)| at some frequencies ω willincrease it at other frequencies. Hence, the similarto the S(s) story, “dirt” is conserved.
• The total amount of “dirt” is increased if the open-loop system L(s) has non-minimum phase zeros,since the RHS of (34) is increased.
• If L(s) has only 1 free integrator, one can decreasethe total dirt by tolerating steady state error due toramp input.
• If L(s) does not have free integrators (i.e. L−1(0) 6=0 or T (0) 6= 1, then a similar relation to (34) exists,
except that in the integral we have ln|T (jω)|T (0)| . This
however, does not pose limitation on making T (jω)small in all frequencies.
M.E. University of Minnesota 211

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Application: Closed loop bandwidth and
Open loop unstable pole
Constraints on Wp, Wu imply the following design rule:
“The closed loop bandwidth should be larger than themagnitude of the unstable open loop pole”
Usually a factor of 2 is used.
Reasoning 1: (From complementary sensitivityfunction)
Suppose that the uncertainty weighting is chosen sothat it is important at high frequency, unimportant atlow frequencies. This roughly translates to requirementon To since ‖WuTo‖ < 1.
One possibility is Wu(s) = sωo
+ 1T. So that
W−1u =
T ωo
(sT + ω); |To(jωo)| ≈ |W−1
u (jωo)|.
Hence, the cross over frequency is ωo, and Wu(0) =T−1. Here, we can interpret ωo as the bandwidth ofthe system, since beyond which, we allow To(jω) tobe small.
M.E. University of Minnesota 212

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Let p ∈ ℜ be a real unstable pole of the open loopplant Go(s).
Then, from the constraint that |Wu(p)| < 1,
|p|
ωo+
1
T< 1 ⇒ ωo >
p
1 − 1/T≥ |p|.
If T is 2 (50% uncertainty at D.C.), then this gives therule of thumb with the factor of 2.
Reasoning 2: (From sensitivity function)
Let Go(s) have a real unstable pole at p ∈ ℜ, andLo(s) = Go(s)C(s).
As a rough approximation, let the open loop gain|Lo(jω)| ≈ 0 when ω > ωo where ωo is the bandwidthof the closed loop system. This implies that So(jω) ≈1 (ln|So(jω)| ≈ 0) when ω > ωo. Let M be the maxof |So(jω)| (sensitivity peak)
From Bode integral (32),
πp =
∫ ωo
0
ln|So(jω)|dω +
∫ ∞
ωo
ln|So(jω)|dω ≤ ωoln(M)
M.E. University of Minnesota 213

ME8281 - Last updated: April 21, 2008 (c) Perry Li
This shows that the sensitivity peak M ≥ eπp/ωo.Since M should be reasonably small (otherwise, thesystem will behave much worse than open loop), p/ωo
should not be large. In particular, if ωo = p, thenM = eπ ≈ 23 which is unacceptable in most cases.When, ωo = 2p, the estimated lower bound for M is4.81.
Note: M >> 1 is bad also for robustness, sinceT = 1−S. Thus, large T requires very good modelingeffort to maintain stability. Also, recall |S−1
o (jω)| isdistance of Lo(jω) to (−1, 0).
M.E. University of Minnesota 214
ME8281 - Last updated: April 21, 2008 (c) Perry Li
Application: Closed loop bandwidth and
Open loop non-minimum phase zero
The constraints on Wu and Wp also imply the followingdesign rule:
“The closed loop bandwidth should be smaller thanthe magnitude of the non-minimum phase zero”
Suppose that the performance weighting Wp(s)satisfies:
W−1p = S
s
s+ ωSThus, the sensitivity becomes important for ω < ωo;high frequency sensitivity requirement is given by S.
Let z be a real non-minimum phase (RHP) zero ofGo(s). Then from the necessary condition, |Wp(z)| <1,
z + ωoS
Sz< 1 ⇒ ωo < (1 − 1/S)z < z
M.E. University of Minnesota 215

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Limitations - summary
• Wu and Wp cannot be large simultaneously.
• Open loop RHP poles and zeros limit how Wu andWp can be defined
• Conservation of dirt theorems say that improvingsensitivity So(jω) in some frequencies requirepayment at others.
• Similar theorem for To(jω), especially when infiniteopen loop D.C. gain (open loop integrators).
• Design implications:
– Closed loop pole should be faster than open loopunstable pole;
– Closed loop pole should be slower than open loopnon-minimum phase zero.
– Problem when open loop pole is fast, and non-minimum phase zero is slow ⇒ consider changingsystem architecture.
M.E. University of Minnesota 216

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Example: Inverted pendulum
Balancing a beam on a palm. Let u be the force onthe palm and M is its mass; m and l are the mass andthe length of the beam. Assume that the beam massis concentrated at the tip. Let y be the tip positionand x be the position of the palm.
Transfer function from u to x:
Gux(s) =ls2 − g
s2(Mls2 − (M +m)g)
This has an unstable pole at +√
(M+m)gMl , and a non-
minimum phase zero at +√
g/l.
Transfer function from u to y:
Guy(s) =g
s2(Mls2 − (M +m)g)
This does not have any zeros.
M.E. University of Minnesota 217

ME8281 - Last updated: April 21, 2008 (c) Perry Li
Conclusions:
• Control is more difficult as the beam becomesshorter, or if the beam is heavier, as the unstablepole gets larger. This requires faster bandwidth onthe part of the human controller.
• Control by looking at the palm (x) is virtuallyimpossible, especially for short beams, because ofthe unstable pole is faster than the non-minimumphase zero. Thus, there will inevitably be alarge sensitivity peak (‖So‖∞) and hence robustnessproblems.
• Control by looking at the tip of the beam (y)is easier since there are no zeros. For l = 0.5m,assume that the palm is much heavier than the beam(M >> m). Using a factor of 2 × p the requiredbandwidth is 1.4 Hz. This is quite reasonable forhumans.
M.E. University of Minnesota 218


![ME8281 HW1 (Spring 2016) Solutions - University of … · Integrate the above in time with xbar(t) computed from with xbar(t=0) = [0; 2]. The linearized solution is obtained from:](https://img.pdfslide.us/doc/110x75/5ad2b2867f8b9abd6c8d07b4/me8281-hw1-spring-2016-solutions-university-of-the-above-in-time-with-xbart.jpg)


























