Embed Size (px)
Citation preview

April 18, 2023
Sparse Surface AdjustmentM. Ruhnke, R. Kümmerle, G. Grisetti, W. Burgard
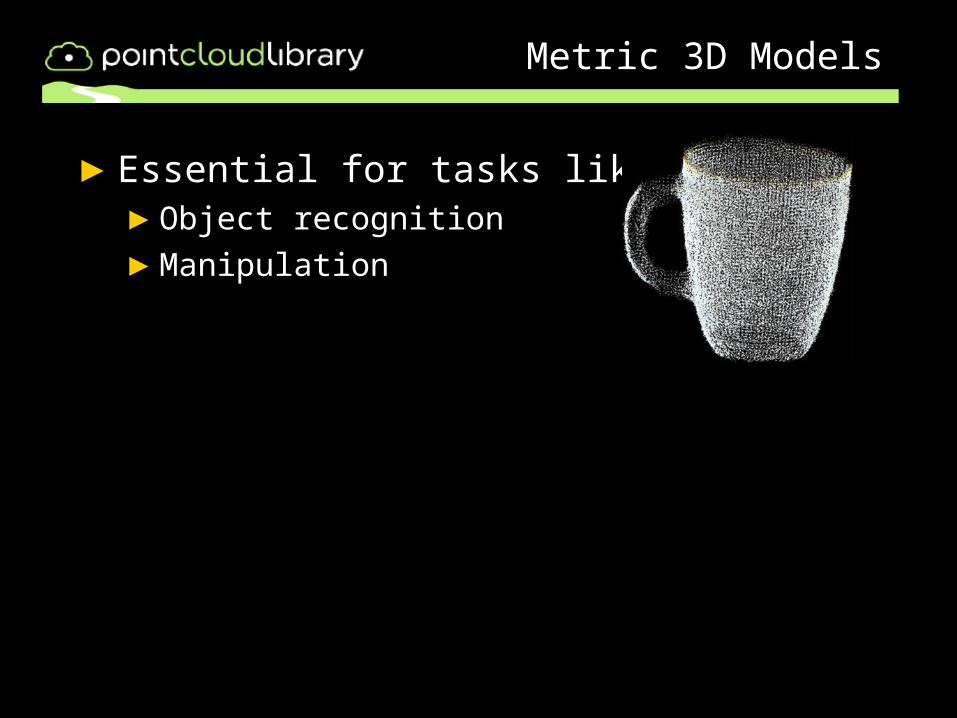
Metric 3D Models
►Essential for tasks like:►Object recognition►Manipulation
Metric 3D Models
►Essential for tasks like:►Object recognition►Manipulation
►Key challenges in model
acquisition with mobile robots►Errors in pose estimate►Measurement errors
Model Creation
►Optimize the sensor poses►Registration / SLAM
►Reduce the impact of measurement errors►Use optimal sensor distance►Local noise reduction techniques (Moving Least
Squares, Statistical Outlier Removal, …)►Pose information is mostly not considered
►Sensor pose gives information about normal direction and range of the measurement
Sparse Surface Adjustment
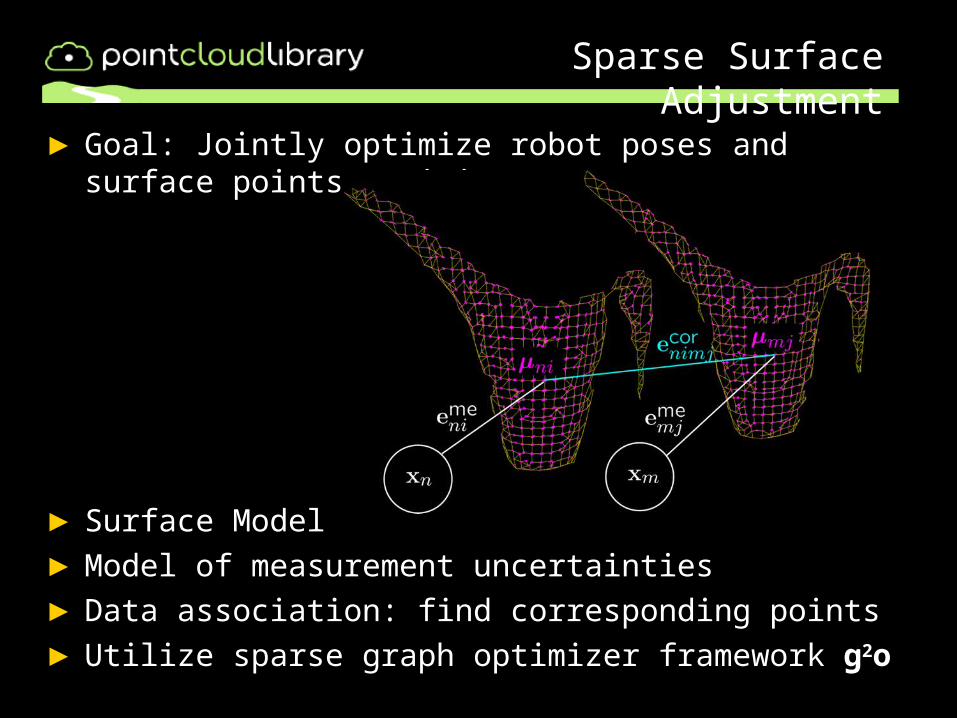
► Goal: Jointly optimize robot poses and surface points positions
► Surface Model► Model of measurement uncertainties► Data association: find corresponding points ► Utilize sparse graph optimizer framework g2o
Surface Model
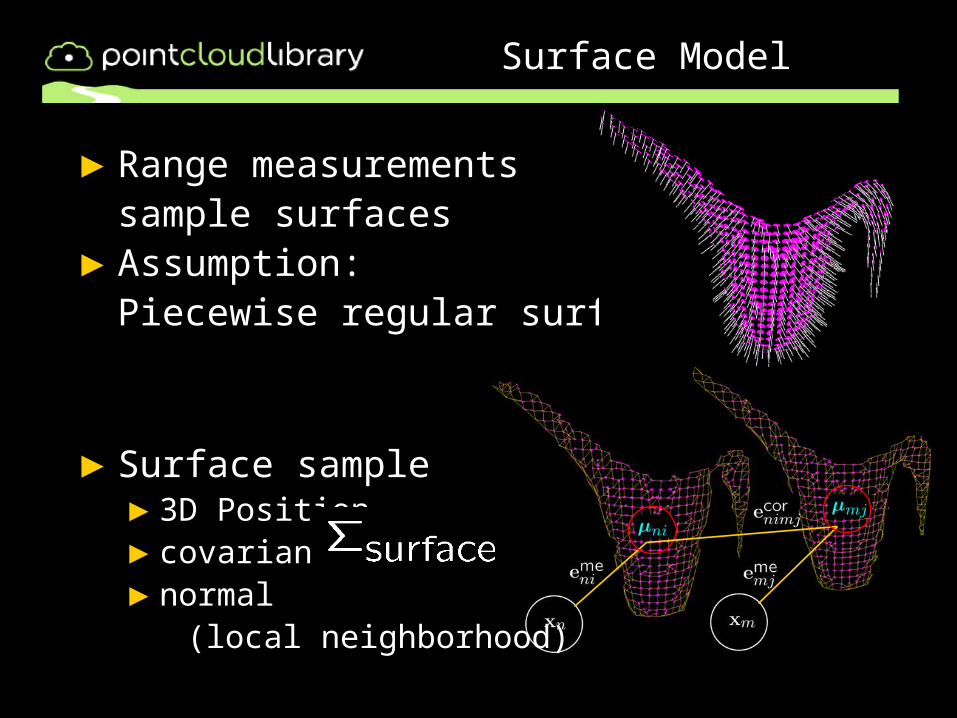
►Range measurements sample surfaces
►Assumption: Piecewise regular surfaces
►Surface sample►3D Position►covariance ►normal (local neighborhood)
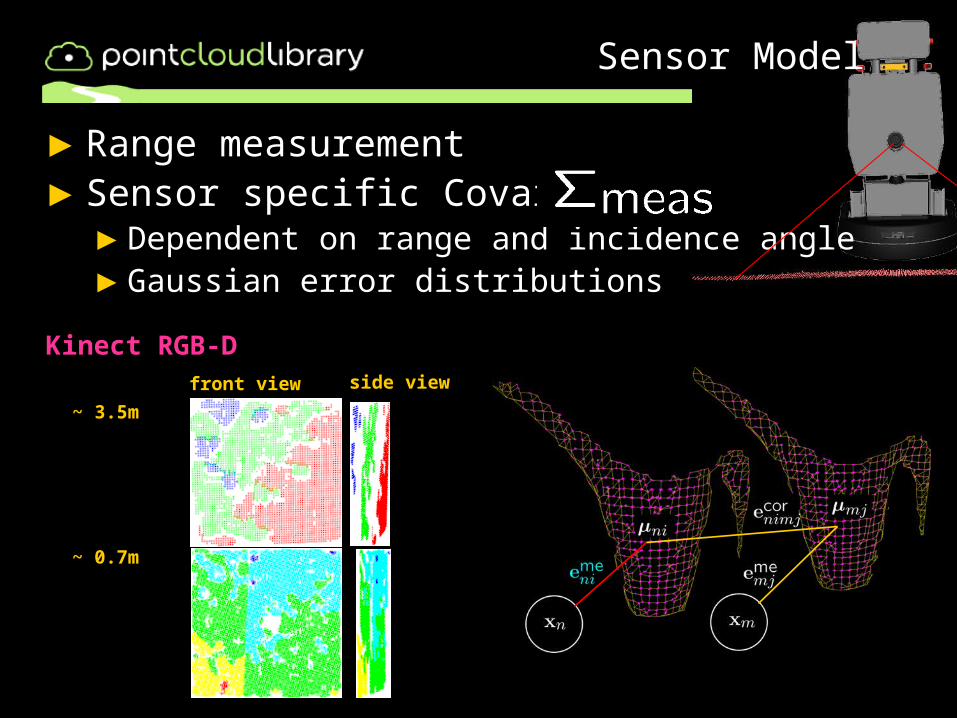
►Range measurement►Sensor specific Covariance
►Dependent on range and incidence angle►Gaussian error distributions
Sensor Model
front view side view
~ 3.5m
~ 0.7m
Kinect RGB-D
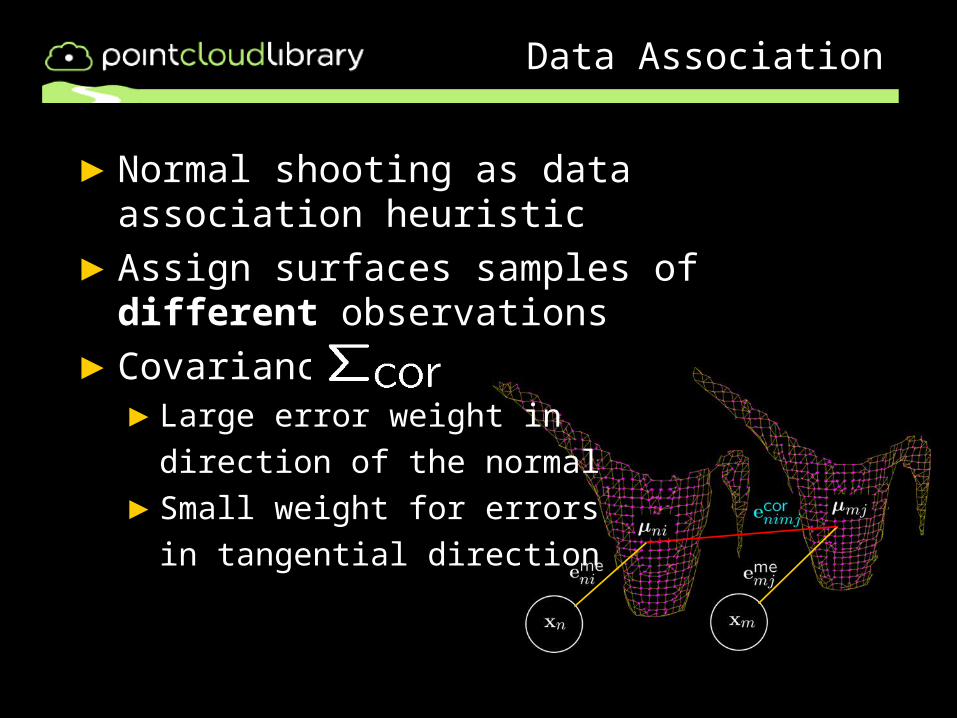
Data Association
►Normal shooting as data association heuristic
►Assign surfaces samples of different observations
►Covariance►Large error weight in
direction of the normal ►Small weight for errors
in tangential direction
Optimization
►Iteratively:►Optimize system with g2o ►Re-compute:
►surface point characteristics (covariance, normals)►data association
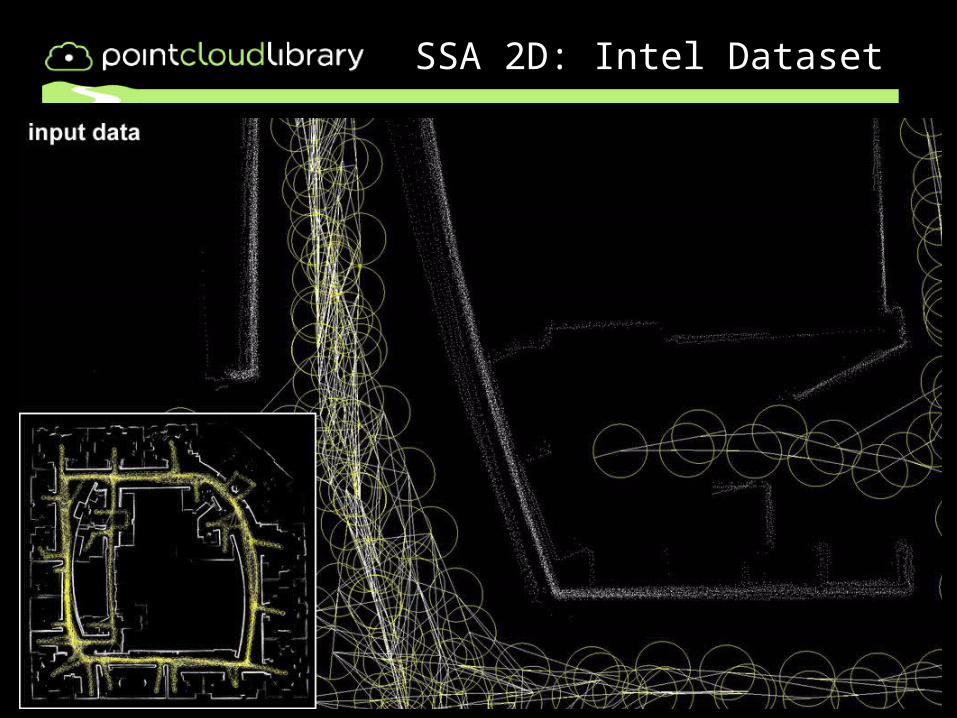
SSA 2D: Intel Dataset
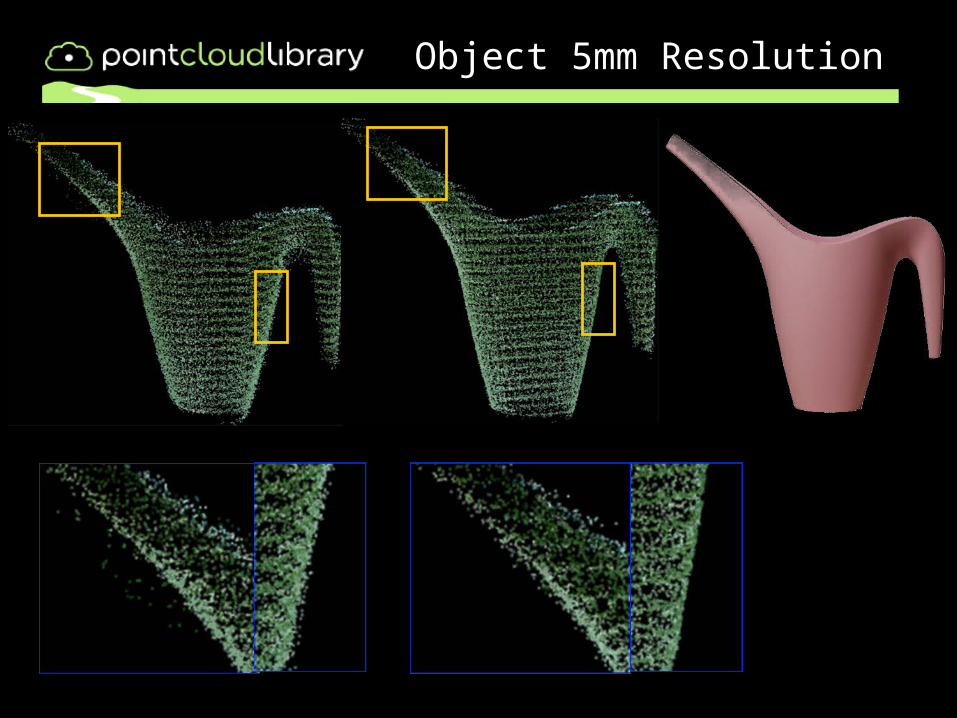
Object 5mm Resolution
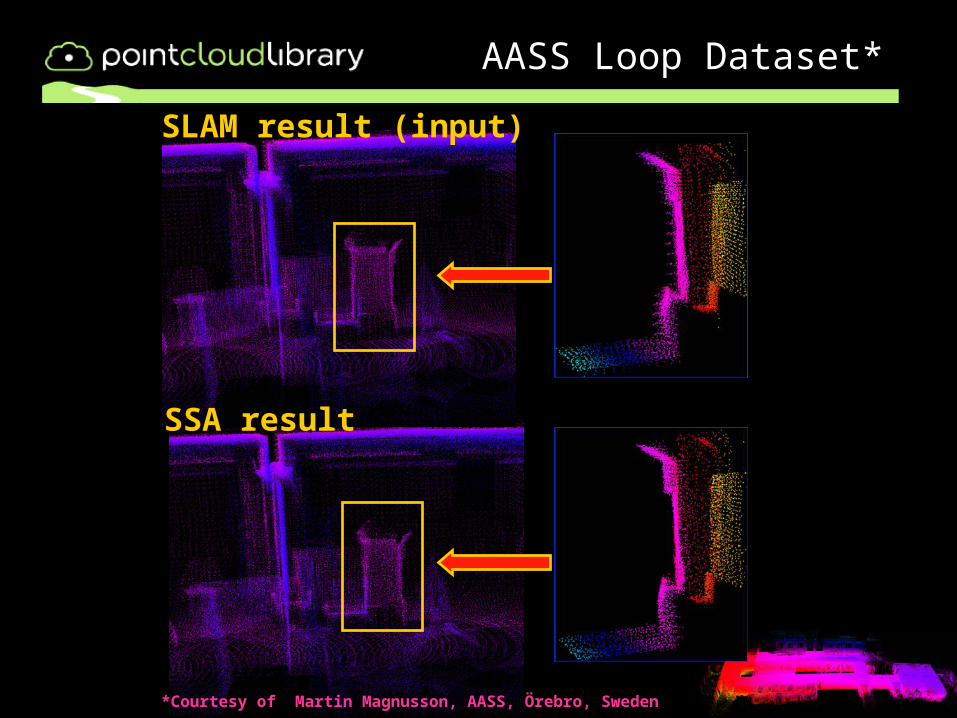
AASS Loop Dataset*
SLAM result (input)
SSA result
*Courtesy of Martin Magnusson, AASS, Örebro, Sweden
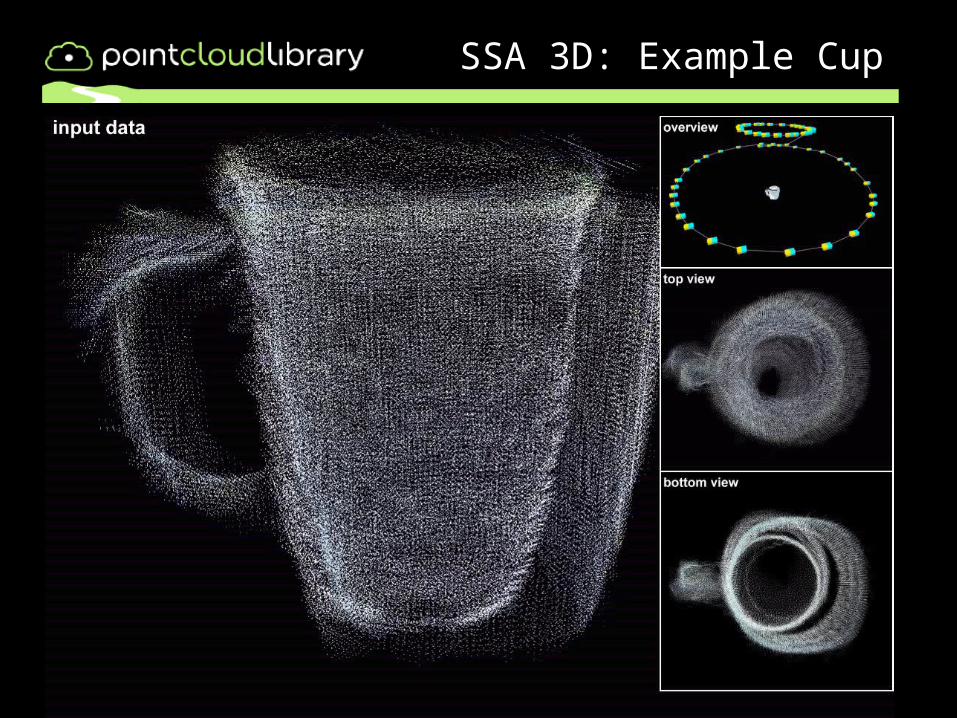
SSA 3D: Example Cup
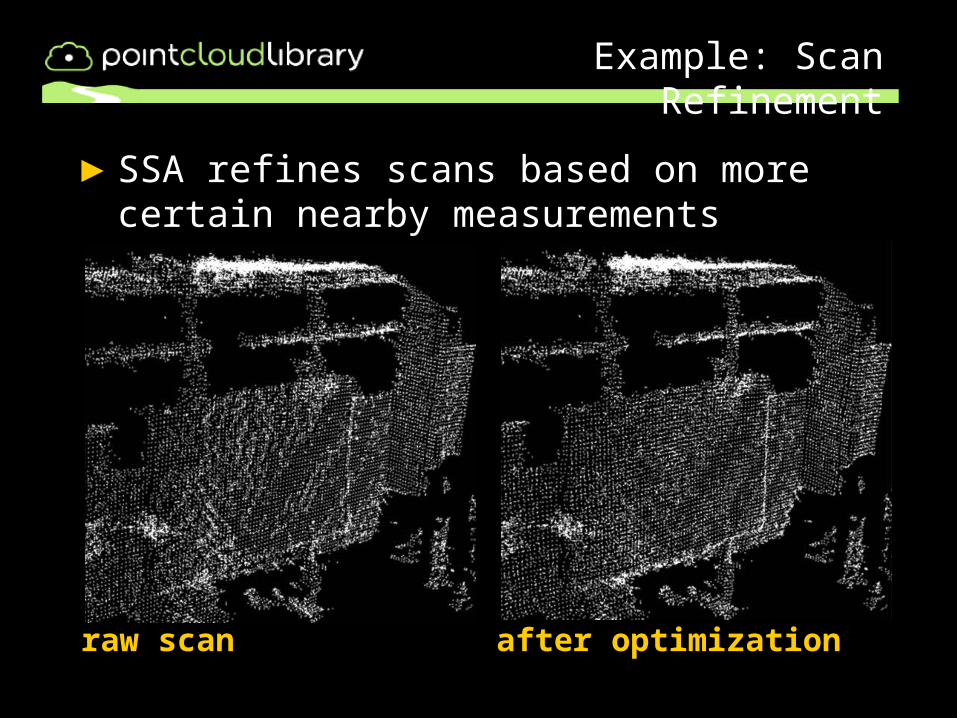
Example: Scan Refinement
►SSA refines scans based on more certain nearby measurements
after optimizationraw scan
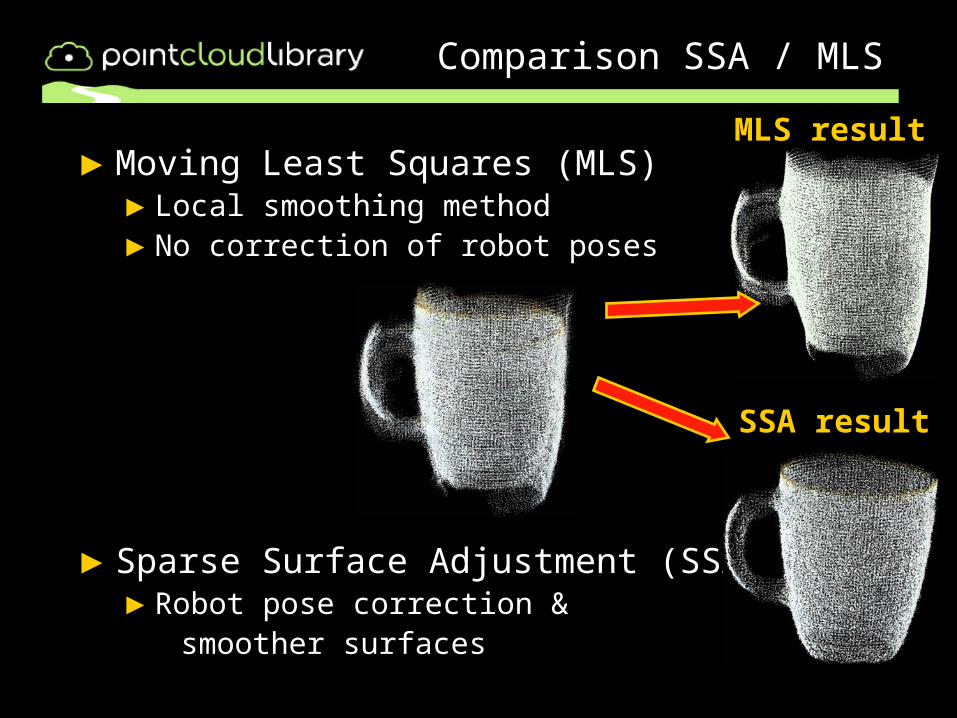
Comparison SSA / MLS
►Moving Least Squares (MLS)►Local smoothing method►No correction of robot poses
►Sparse Surface Adjustment (SSA)►Robot pose correction & smoother surfaces
SSA result
MLS result
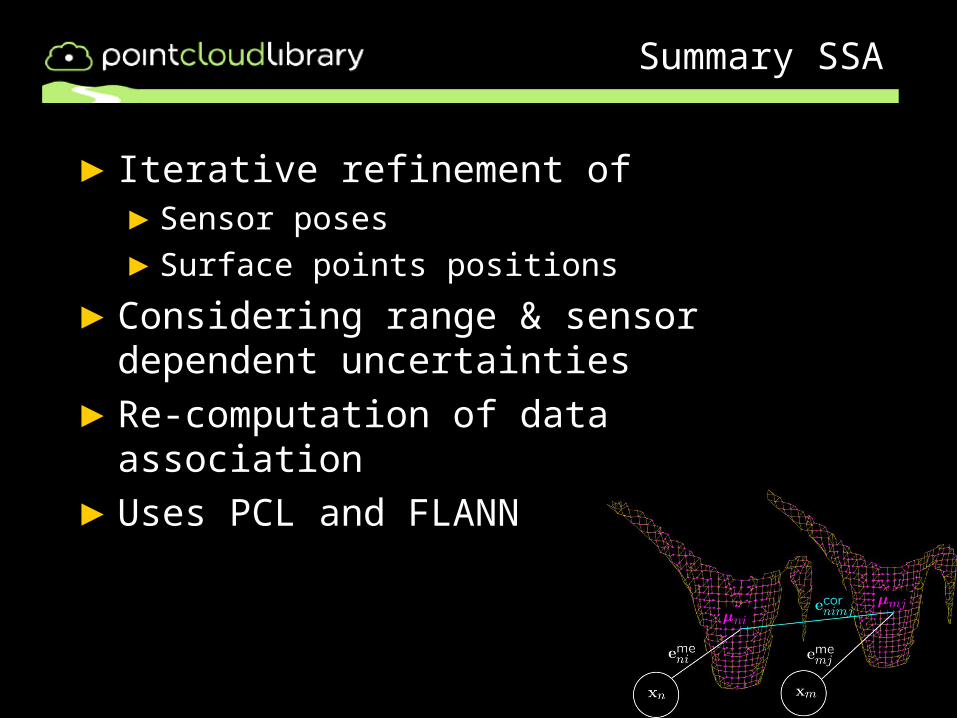
Summary SSA
►Iterative refinement of ►Sensor poses►Surface points positions
►Considering range & sensor dependent uncertainties
►Re-computation of data association►Uses PCL and FLANN