Embed Size (px)
DESCRIPTION
My paper in International Journal of Geographical Information Science (IJGIS).
Citation preview

PLEASE SCROLL DOWN FOR ARTICLE
This article was downloaded by: [2009 Universiti Putra Malaysia]On: 9 July 2010Access details: Access Details: [subscription number 781191585]Publisher Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House, 37-41 Mortimer Street, London W1T 3JH, UK
International Journal of Geographical Information SciencePublication details, including instructions for authors and subscription information:http://www.informaworld.com/smpp/title~content=t713599799
Maximal service area problem for optimal siting of emergency facilitiesVini Indriasaria; Ahmad Rodzi Mahmudb; Noordin Ahmadc; Abdul Rashid M. Shariffd
a GIS and Geomatic Engineering, Universiti Putra Malaysia, Malaysia b Department of CivilEngineering, Universiti Putra Malaysia, Malaysia c Geomatics Engineering Unit, Universiti PutraMalaysia, Malaysia d Department of Biological and Agricultural Engineering, Universiti PutraMalaysia, Malaysia
Online publication date: 01 March 2010
To cite this Article Indriasari, Vini , Mahmud, Ahmad Rodzi , Ahmad, Noordin and Shariff, Abdul Rashid M.(2010)'Maximal service area problem for optimal siting of emergency facilities', International Journal of GeographicalInformation Science, 24: 2, 213 — 230To link to this Article: DOI: 10.1080/13658810802549162URL: http://dx.doi.org/10.1080/13658810802549162
Full terms and conditions of use: http://www.informaworld.com/terms-and-conditions-of-access.pdf
This article may be used for research, teaching and private study purposes. Any substantial orsystematic reproduction, re-distribution, re-selling, loan or sub-licensing, systematic supply ordistribution in any form to anyone is expressly forbidden.
The publisher does not give any warranty express or implied or make any representation that the contentswill be complete or accurate or up to date. The accuracy of any instructions, formulae and drug dosesshould be independently verified with primary sources. The publisher shall not be liable for any loss,actions, claims, proceedings, demand or costs or damages whatsoever or howsoever caused arising directlyor indirectly in connection with or arising out of the use of this material.

Research Article
Maximal service area problem for optimal siting of emergency facilities
VINI INDRIASARI{, AHMAD RODZI MAHMUD*{, NOORDIN AHMAD§
and ABDUL RASHID M. SHARIFF"
{GIS and Geomatic Engineering, Universiti Putra Malaysia, Malaysia
{Department of Civil Engineering, Universiti Putra Malaysia, Malaysia
§Geomatics Engineering Unit, Universiti Putra Malaysia, Malaysia
"Department of Biological and Agricultural Engineering, Universiti Putra Malaysia,
Malaysia
(Received 4 June 2008; in final form 1 October 2008 )
Geographic information systems (GIS) have been integrated to many applica-
tions in facility location problems today. However, there are still some GIS
capabilities yet to be explored thoroughly. This study utilizes the capability of
GIS to generate service areas as the travel time zones in a facility location model
called the maximal service area problem (MSAP). The model is addressed to
emergency facilities for which accessibility is an important requirement. The
objective of the MSAP is to maximize the total service area of a specified number
of facilities. In the MSAP, continuous space is deemed as the demand area, thus
the optimality was measured by how large the area could be served by a set of
facilities. Fire stations in South Jakarta, Indonesia, were chosen as a case study.
Three heuristics, genetic algorithm (GA), tabu search (TS) and simulated
annealing (SA), were applied to solve the optimization problem of the MSAP.
The final output of the study shows that the three heuristics managed to provide
better coverage than the existing coverage with the same number of fire stations
within the same travel time. GA reached 82.95% coverage in 50.60 min, TS did
83.20% in 3.73 min, and SA did 80.17% in 52.42 min, while the existing coverage
only reaches 73.82%.
Keywords: Facility location; Emergency facilities; Service area; Geographic
information systems; Network analysis
1. Introduction
Studies about facility location problems, also known as Location Science, have
appeared in the literature since the beginning of the 1970s (e.g. Church and ReVelle
1974, Toregas and ReVelle 1972, Toregas et al. 1971), and even earlier (e.g. Hogg
1968). Problems in facility location were usually denoted as optimization problems
in operations research (OR) framework which should be solved by certain
algorithms in order to optimize single or multiple objective functions. The objective
is either to minimize costs or to maximize benefits. The problems include locating
hospitals, schools, power plants, ambulances, fire stations, pipelines, conservation
areas and warehouses. Early facility location modeling could only work with small
dataset and involve simple functions to measure spatial interaction between facilities
*Corresponding author. Email: [email protected]
International Journal of Geographical Information Science
Vol. 24, No. 2, February 2010, 213–230
International Journal of Geographical Information ScienceISSN 1365-8816 print/ISSN 1362-3087 online # 2010 Taylor & Francis
http://www.tandf.co.uk/journalsDOI: 10.1080/13658810802549162
Downloaded By: [2009 Universiti Putra Malaysia] At: 02:47 9 July 2010

and demands. Currently, with the advent of geographic information systems (GIS)
and sophisticated computer technology, decision making in facility site selection can
be enhanced into a larger dataset with more complicated data structures, more
accurate spatial measurement, spatial analysis and spatial modeling. GIS capability
to represent spatial objects as points, line, or polygons has increased the flexibility of
entity representations in facility location modeling no longer limited to points as it
has been (Miller 1996). Furthermore, GIS capability to perform surface modeling
allows location science to extend its version into three-dimensional problems.
Several studies have integrated GIS into location modeling (e.g. Murray and
Tong 2007, Liu et al. 2006, Li and Yeh 2005, Aertz and Heuvelink 2002, Yeh and
Cow 1996). However, there are still some GIS capabilities yet to be explored
thoroughly, requiring further investigation into how they may be effectively
implemented to improve solutions for facility location problems. This study tries to
enhance the location selection process by utilizing the GIS capability to generate
service areas as travel time zones, within an emergency facility context. The objective
of this study is to establish service coverage modeling in a continuous demand
region, with road accessibility considerations. This study emerges from the fact that
most conventional models only define a facility’s service area simply as a circular-
shaped region based on a specified radius. Such a definition might be appropriate
for facilities which are not influenced by topographical barriers, like sirens or
telecommunication transmitters. But for particular facilities like fire stations,
ambulances and delivery services, accessibility is an important requirement.
Through a network analysis, GIS allows the service area to be calculated by taking
into account the road access, barriers and road network attributes. This advantage
from GIS should be incorporated in the service area calculation to obtain a more
realistic model.
1.1 Emergency facility location problem
Facility location modeling introduced in this paper is addressed to emergency
facilities. Not all location models are suitable to be adopted for emergency facilities.
In fact, certain models are only appropriate for certain types of facilities. To select
an appropriate model, we should understand the objective of the model and the
nature of facility services. For example, we have location models concerning
minimizing distance called the P-median problem (PMP) and P-center problem
(PCP). The PMP has the objective to minimize the total or average distance between
facilities and demands assigned to them, whereas the PCP has the objective to
minimize the farthest distance (Klose and Drexl 2005, Hamacher and Nickel 1998).
We also have other models concerning optimizing service coverage, such as the
location set covering problem (LSCP) and maximal covering location problem
(MCLP). In the LSCP, the optimum number of facilities is one aspect of the solution
to the problem, and the constraint requires for all demands must be covered by at
least one facility (Toregas and ReVelle 1972). In the MCLP, the number of facilities
is known a priori and the objective becomes to maximize services for demands
(Church and ReVelle 1974). Which model is suitable for emergency facilities?
Emergency facilities have a unique characteristic in the way they measure benefits.
Typically, the objective of facility location problem is either to minimize costs or
maximize benefits. In the case of emergency services, the objective is often stated as
the minimization of losses to the public (Aly and White 1978). This objective is
equivalent to the maximization of benefits. Typical illustrations of emergency
214 V. Indriasari et al.
Downloaded By: [2009 Universiti Putra Malaysia] At: 02:47 9 July 2010

facilities are ambulances, fire stations, police stations, warning sirens, health clinics,
hospitals, police patrol cars and civil defense stations. In the case of ambulance
services, sick or injured people are to be delivered to the hospital. Fire stations are to
be located in order to minimize losses resulting from fire, such as property loss, loss
of lives and psychological damages. In the case of police services, protections against
criminal actions are to be provided.
It is obvious that in any case, the response time or distance traveled is a crucial
parameter to measure the quality of emergency services (Toregas et al. 1971).
Longer response will result in more losses, indicating the poor service. Conversely,
quicker response will save more properties and lives from losses and damages.
Therefore, emergency facility location problems are typically modeled under time or
distance constraint. This nature of emergency services affects the types of models
that should be adopted for locating emergency facilities. For instance, it may make
more sense to a city fire department to locate fire stations so that a response is
possible to every property in less than 5 min, than to worry about minimizing the
average response time (Longley et al. 2005). Given this consideration, coverage
location problems such as the MCLP and LSCP are more appropriate than the PMP
which seeks to minimize the total/average distance. In fact, both the LSCP and
MCLP and their variants appear as dominant approaches applied to solve
emergency facility location problems. ReVelle and Snyder (1995), for example,
developed an extension of the MCLP for integrated fire and ambulance siting, and
Chrissis (1980) modified the LSCP into a dynamic model for locating fire stations.
1.2 The maximal covering location problem
This study is interested to further develop the MCLP for optimal siting of
emergency facilities by integrating GIS in the service coverage modeling. The MCLP
was first introduced by Church and ReVelle (1974). It seeks the maximum
population that can be served by a limited number of facilities within a stated
service distance or time. A mathematical formulation of this problem is stated as
follows:
MCLP: Maximize z~X
i [ I
wixi ð1Þ
subject to:P
j [Ni
yj§xi Vi [ I ð2Þ
Pj [ J
yj~p ð3Þ
xi [ 0, 1f g, yj [ 0, 1f g Vi [ I , Vj [ J ð4Þ
where:
i,I the index and set of demand nodes
j,J the index and set of potential facility sites
Ni {j g J|dij(S}5the set of all node j which is within S of node i
dij the shortest distance/time between node i and node j
S the desired service distance/time for every demand node i
wi the population to be served at node i
Maximal service area problem 215
Downloaded By: [2009 Universiti Putra Malaysia] At: 02:47 9 July 2010

p the number of facilities to be sited
xi~1 if demand node i is covered by one or more facilities
0 otherwise
�
yj~1 if a facility is sited at the node j
0 otherwise
�
2. The maximal service area problem
The location model developed in this study is called the maximal service area
problem (MSAP), as its objective is to maximize the total service area of a fixed
number of facilities. The MSAP is created as a modification of the MCLP which
makes use of the capability of GIS to generate service areas of facilities as travel time
zones. In general, the service area of a facility can be defined as: (1) the area that is
closer in distance, time or cost to that facility than to any other facility; or (2) the
area that can be reached from the facility within a specified distance, time or cost. It
may be generated in planar region or based on the network. In the MCLP, a
demand node is said to be covered when the closest facility to that node is at a
distance or time less than or equal to S. Conversely, a demand node is said to be
uncovered when the closest facility to that node is at a distance or time greater than
S. The value of S can be chosen differently for each demand node i. Ni is the set of
facility sites eligible to cover demand node i. We can term the area within radius of S
from a facility as the service area of that facility, and the shape of this service area is
circular. Distances between demand nodes and facilities are typically measured as
straight-line distances by calculating the difference of location coordinates between
the two entities with the well-known Pythagorean formula. Such calculation can be
done without GIS.
In GIS, it is possible to generate various types of service areas according to the
nature of facility services. Figure 1 depicts various ways to define the service area.
Circular coverage is appropriate to define services provided by a warning siren or
radar station (e.g. Murray and O’Kelly 2002), assuming that the topographical
variation is not an issue. Thiessen polygon, which is very useful for proximity
mapping, may be conveniently adopted to define the service area of schools, where
students are to be allocated to the nearest school from their homes; or warehouses,
where retail stores should be supplied by the nearest warehouse. In surface
modeling, the viewshed of an observer point can be defined as the service area of the
observer point. Viewshed identifies regions of visibility from one or more observer
points. It typically works with raster digital elevation model. Each cell in the output
raster receives a value that indicates how many observer points can be seen from
each location. All cells that cannot see the observer point are given a value of zero.
Viewshed can be applied for locating transmission towers and designing a forest fire
watch tower. The travel time zone, or in some texts referred to as travel time band, is
a polygon layer, overlaid on the network, indicating band of travel time. Since
emergency facilities are typically modeled under time or distance constraint, the
travel time zones are the most appropriate way to define their service areas. In the
travel time zones, service area polygons are generated based on the network through
216 V. Indriasari et al.
Downloaded By: [2009 Universiti Putra Malaysia] At: 02:47 9 July 2010

a network analysis in a vector GIS environment. Network analysis in GIS takes into
account network attributes such as road width, speed limit, barriers, turn restriction
and one way restriction. Most GIS packages which support network analysis can
generate travel time zones. Some of these are TransCAD, ArcGIS Network Analyst,
GRASS with its v.net.alloc and v.nec.iso functions, SANET with its Voronoi
function and TNTMips Network Analysis with its allocation functionality.
Similar to the MCLP, the MSAP is designed as a discrete model where a specified
number of facility sites that achieve the best objective function value of the model
are selected out of a finite set of candidate sites. The entire region of the study area is
deemed as the demand region. Thus, the demand is continuous. In the MSAP, the
facility does not have capacity constraints which limit demand quantities it can
serve, or the capacity is not taken into consideration. As such, the model is
uncapacitated.
The objective of the MSAP is to reach the largest possible area of services from a
specified number of facilities. Totaling service area from multiple facilities cannot be
done simply by summing areas of service area polygons through the mathematical
addition operation, as the polygons are overlaid one on top of another (figure 2(a)).
Instead, all of the service area polygons must be dissolved into a single polygon first,
and then the area of the single polygon reflects the total service area of facilities
(figure 2(b)). The dissolving process and area calculation must be done in the GIS,
and surely will take a significant amount of time when run iteratively.
A method is introduced to overpass the dissolving process and area calculation in
the implementation of the mathematical modeling by using surrogate information.
Figure 1. Various ways to define service area: (a) circular coverage; (b) Thiessen polygons;(c) viewshed; (d) travel time zones.
Maximal service area problem 217
Downloaded By: [2009 Universiti Putra Malaysia] At: 02:47 9 July 2010

First, the continuous space of the demand region is partitioned into pieces of
discrete objects (figure 3(a)). The number of demand objects intersecting with a set
of service area polygons is then used as the surrogate information to measure the
total service area (figure 3(b)). We could easily understand that the larger number of
demand objects falling within the service area polygons indicates the larger total
service area. The service area polygons need not be dissolved in this way, thus the
computation time can be significantly shortened. As our interest in the MSAP is the
area of services, in this way we only have information of the number of demand
objects covered by multiple facilities. This means we calculate the percentage of
coverage as a ratio of the number of demand objects covered to the number of total
demand objects in the study area. The value of this percentage may not be exactly
the same as the ratio of the area of demand region covered to the area of the whole
demand region, which is our interest. But in a fine resolution of demand objects, the
former percentage will be close to the latter, and hence is sufficient to measure the
solution quality of the problem.
Either regular points or polygons can be used for discretization, with various
arrangements supported by the software. However, when evaluating a service from a
facility to polygon-based demands, some work must be done to specify conditions in
which polygons are said to be covered, as some polygons may only be partially
covered. For instance, coverage will be provided if the closest point of the polygon
falls within the service area of a facility. The center point of a polygon and the
percentage of a polygon covered can also be used to define coverage (Murray et al.
2008). These steps are unnecessary when regular points are used, as there is no issue
of partial coverage in point representations. In our approach, we only consider the
Figure 2. Calculation of total service area from multiple facilities. (a) Service area polygonsfrom multiple facilities are overlaid one on top of another. (b) The service area polygons aredissolved into a single polygon; the area of the single polygon reflects the total service area.
Figure 3. Calculation of total service area from multiple facilities through discretization ofdemand region. (a) The planar space of demand region is represented by discrete objects. (b)The number of demand objects falling within the service area polygons of facilities is used assurrogate information to measure the total service area.
218 V. Indriasari et al.
Downloaded By: [2009 Universiti Putra Malaysia] At: 02:47 9 July 2010

points inside or outside the polygon. Hence, to simplify the implementation of
mathematical modeling, regular points are used for discretization of demand region.
When point objects are used, the optimization problem of the MSAP becomes to
maximize the number of demand points falling within the service area polygons of a
set of facilities. The problem is then formulated as follows:
MSAP: Maximize z~X
i [ I
wixi ð5Þ
subject to:Pj [ J
aijyj§xi Vi [ I ð6Þ
Pj [ J
yj~p ð7Þ
xi [ 0, 1f g, yj [ 0, 1f g Vi [ I , Vj [ J ð8Þ
where:
aij~1 if demand object i falls within service area polygon of facility j
0 otherwise
�
Other notations have been defined previously.
In essence, this formula is the same as that of the MCLP, except for the constraint
in equation (6) where information of aij is obtained from the GIS. This is where the
integration of GIS distinguishes the MSAP from the original MCLP. To evaluate
the coverage of facilities over demand points, the GIS functionality is used to
examine whether the points fall within the service area polygons of facilities, and
these service area polygons are generated also by the GIS through a network
analysis as explained earlier. The weight wi in the MCLP represents the population
aggregated in the demand object. Since no data aggregation takes place in the
MSAP, this coefficient may be replaced by the risk level of the demand point. For
example, high-risk points have a higher weight than do low-risk points. For this
study, there is no distinction of risk levels among demand points. Thus, the value of
wi is set to 1 or simply ignored.
3. Solution algorithms
Coverage location problems, like MCLP and MSAP, are concerned with the
problem of selecting p facility sites out of n candidate sites that achieve the best
objective function value of the problem. In mathematics, such a problem is
considered as a combinatorial problem. The number of possible combinations is
calculated by the formula:
Cnp~
n!
p! n{pð Þ! ð9Þ
From that formula, we can see that the number of possible combinations C grows
exponentially as the number of facility sites p and the number of candidate sites n
increase. For a large dataset, it is impractical to investigate all possible combinations
(brute search) to find the best solution, as the run time needed is extremely
enormous. Even the most sophisticated computer cannot complete the search within
Maximal service area problem 219
Downloaded By: [2009 Universiti Putra Malaysia] At: 02:47 9 July 2010

a reasonable time. Unfortunately, most facility location problems involve a large set
of demand nodes and candidate facility sites. Therefore, we need to solve these
problems using techniques other than brute search. Two classifications of solution
techniques are available for this purpose – exact algorithms and heuristics. While
exact algorithms guarantee the optimal solution, heuristics only provide a near
optimal solution, as the solution is not proved to be the best. The most popular
exact algorithms are branch and bound and cutting plane (Wang 2006). Instead of
exhaustively searching the entire solution space to find the best solution, exact
algorithms use an intelligent search by discarding feasible solutions that have been
proved not to provide the optimal solution without having to search all of them.
Techniques to prove these non optimal solutions vary amongst algorithms.
Although able to find the real optimal solution, Schietzelt and Densham (2003)
stated that exact algorithms have relatively restricted importance for facility location
problems. They have been successfully applied to reduce problem sizes within hybrid
approaches and as validation methods for solutions previously found by heuristics.
Generally, however, their scope is limited by the inferior performance. Solution
times tend to increase exponentially with problem size. Therefore, developing more
efficient heuristics remains a great challenge. Church and Sorensen (1996) have
established criteria for selecting and developing appropriate heuristic to solve
facility location problems. These criteria involve the robustness of heuristic process,
ease of understanding, speed or efficiency of technique and ease of development and
integration. Among heuristics that have been applied in facility location problems
are tabu search (Jaeggi et al. 2008, Sun 2006), simulated annealing (Murray and
Church 2004, Aerts and Heuvelink 2002, D’Amico 2002), genetic algorithm (Li and
Yeh 2005, Jaramillo et al. 2002) and ant colony algorithm (Chan and Kumar 2008,
Liu et al. 2006, Zecchin et al. 2006). For this paper, genetic algorithm (GA) was
employed to solve the MSAP. Other heuristics, tabu search (TS) and simulated
annealing (SA), were also tested for comparison. Assuming that the reader is
familiar with these heuristics, we will not be discussing their theoretical descriptions
within this paper, and will directly address our problem.
3.1 Genetic algorithms
Search techniques in GA are based on the mechanism of natural selection and
natural genetics. Our GA is designed as follows:
1. Encoding: Each solution is encoded by a bit string as the chromosome
structure (figure 4). Each bit represents a candidate site, thus the length of bits
equal to the number of candidate sites. A bit value of 1 means that the facility
is located at the corresponding site; a bit value of 0 means otherwise. Since the
number of facilities to be sited p is a fixed variable in the MSAP, there are
Figure 4. Genetic representation of solution for the MSAP.
220 V. Indriasari et al.
Downloaded By: [2009 Universiti Putra Malaysia] At: 02:47 9 July 2010

always p bits which have the value of 1 in any chromosome. We refer thesebits as 1-value bits.
2. Population size: Practically, a population size around 100 individuals is quite
common (Sivanandam and Deepa, 2007). But in our GA, the fitness values of
all individuals are not too much diverse. Hence, 50 individuals will suffice to
explore the whole search space, as a larger population size might not provide
significant improvement to the solution yielded. Moreover, by using a smaller
population size, we gain the advantage of faster processing time.
3. Fitness function: The fitness function value of each chromosome is identical tothe objective function of the MSAP. That is, the number of demand points
covered by each individual.
4. Parent selection: We prefer that better individuals will be selected as the
parents for reproduction more often than the worse ones. Actually, the
roulette wheel and stochastic universal sampling techniques could meet this
purpose. However, as the interval of fitness function values of the solutions is
relatively small, those techniques become less significant because each solution
will have a nearly equal chance to be picked. Thus we use the tournamentselection instead.
5. Reproduction: Reproductions are typically performed by crossover and
mutation. But in our case, the number of 1-value bits in the individual
chromosome must be maintained. Due to this constraint, any crossover
operator can not be applied as it might violate the constraint. Therefore,
chromosomes of offspring are copied directly from chromosomes of parents,
and then the bits in the chromosomes are shuffled by mutation. The mutation
is performed by relocating one or more facilities to other free sites. Eachrelocation will swap one bit from 0 to 1 and another bit from 1 to 0. An
integer number between 1 and p/2 is randomly generated to determine how
many facilities will be relocated in each mutation.
6. Replacement: At each time step, offspring as many as the population size are
created in the reproduction process. These offspring replace less fit individuals
in the existing population to form a new generation. In this way, the best
solutions will survive on the population and the average fitness value of the
population improves over generations.7. Convergence criteria: The search is terminated by two stopping conditions –
maximum generations and stall generations. The algorithm stops either when
50 generations have evolved or if there is no improvement in the objective
function for five consecutive generations.
3.2 Tabu search
TS is aimed to overcome the problem of a local search procedure becoming trapped
at a local optimum by permitting non-improving moves whenever a local optimum
is encountered. It achieves this by recording the recent history of searches in a tabu
list and ensuring that future moves do not search this part of the search space, at
least not for a specified number of iterations (de Smith et al. 2007). Our TS is
designed with single tabu list (short-term memory) and single aspiration criteria. The
details are as follows:
1. Move: The move from one solution to the next solution is performed by
dropping and adding sites that yield the best coverage change. The best
Maximal service area problem 221
Downloaded By: [2009 Universiti Putra Malaysia] At: 02:47 9 July 2010

change does not necessarily an increase of coverage. When a local optimum is
encountered, any future move will only cause a decrease of coverage. At thissituation, the best change is the one that causes the smallest decrease.
2. Short-term memory: Short-term memory is a tabu list containing a series ofrecently dropped sites. The tabu restriction prevents these sites from being
added back to a solution for a specified number of iterations. We permit only
10 sites to be tabu at any given time. As a result, each dropped site remains
tabu for 10 iterations and then is removed from tabu list, releasing it from its
tabu status. There are 63 candidate sites in the solution space, and only 17 of
them are picked at each solution. With 10 sites retained in the tabu list, 36 free
sites are left admissible to be added. This number is considered sufficient for
diversification.
3. Aspiration criteria: The aspiration criterion to override the tabu status that
allows the move to add a site in the tabu list will be satisfied only when theresulting coverage is larger than the best coverage achieved in the current
search cycle.
4. Stopping rule: The search terminates when a maximum number of moves is
reached.
3.3 Simulated annealing
In our SA, each solution consists of a set of sites representing open facilities. At each
iteration, the current set is perturbed by randomly replacing several sites with other
free sites. Energy level C is defined as the coverage achieved by each solution. Thenew set will replace the current set if C(i + 1) is higher than C(i), where C(i + 1) is the
coverage of the new set and C(i) is the coverage of the current set. If C(i + 1) is lower
than C(i), the acceptance of replacement is subject to the following condition:
expC iz1ð Þ{C ið Þ
T ið Þ
� �wR ð10Þ
R is a random number uniformly distributed in the range [0,1]. T is a temperature
gradually cooled over time by a factor a as shown in formula (11), where 0,a,1.We use a50.9 in our SA. For initiation, T is set in such a way that the probability of
non-improving replacements being accepted is about 90%.
T sz1ð Þ~a�T sð Þ ð11Þ
To avoid too lengthy iterations within each temperature stage, T is controlled by
two parameters. It will decrease either when 100 solutions have been evaluated or
when the energy level has reached a constant value. The algorithm will terminate
when the system has been frozen. The freezing temperature at which the system isdeemed frozen is stipulated such that only about 1% of non-improving replacements
will be accepted.
4. Application
4.1 Study area and data
Fire stations in South Jakarta, Indonesia, are chosen to evaluate the effectiveness of
the MSAP. The road network dataset for performing the network analysis was
specially prepared. The ArcGIS 9.2 package was utilized to build the road network
222 V. Indriasari et al.
Downloaded By: [2009 Universiti Putra Malaysia] At: 02:47 9 July 2010

dataset. In ArcGIS, the road network connectivity is established either at endpoint
or at any vertex of the line object representing the road (figure 5). For this study, the
former connectivity rule was selected. Thus, the road data must be prepared so that
endpoints are present at all intended junctions. In certain cases where the
connectivity does not exist in the junction, such as in flyovers or underpasses, the
line must go through the junction so that the connectivity will not be established at
the junction.
There are five classes of roads in South Jakarta (table 1) which are classified by
similarities in physical characteristics and traffic condition. This classification is
used to stipulate the road hierarchies. The speed for each class is the average speed
between day and night estimated roughly through a driving test for a whole week.
The higher hierarchy road has the higher speed. The tollroad is excluded when
building the road network dataset, as fire vehicles do not typically use the toll road
as their routes due to limited entrances, unless the fire incident occurs along it.
Attributes of road data contain a Meters field representing the road segment length,
and a Minutes field representing the travel time to traverse the road segment. From
Meters and Speed fields, values of the Minutes field can be calculated. The Minutes
field is then used as the network impedance in the network analysis.
There are 63 candidate sites available in the study area, consist of 46 proposed
sites and 17 sites of existing fire stations. The proposed sites were obtained through
the site suitability evaluation performed as a multi-criteria decision making
(MCDM) problem in a raster GIS environment. A series of suitability criteria,
such as proximity to high-hierarchy road, distance to existing fire stations, ability to
cover fire risk zones and proximity to water sources were evaluated to determine
suitable sites for locating new fire stations. The number of existing fire stations is
used as the number of facilities to be sited in the MSAP (p), so that the output can be
Figure 5. Network connectivity rules in ArcGIS. (a) At endpoint; Junctions j1, j2, j3 and j4are only created at endpoints of lines L1 and L2. No connectivity established at the sharedvertex of crossing lines L1 and L2. (b) At any vertex; A junction j5 is created at the sharedvertex of lines L1 and L2. The connectivity is established at the junction, and the two lines aresplit into four edges by the junction.
Table 1. Road network classification.
Class Hierarchy Speed (km/h)
Tollroad 1 75Trunkroad 2 55Thoroughfare 3 45Main road 4 35Local street 5 25
Maximal service area problem 223
Downloaded By: [2009 Universiti Putra Malaysia] At: 02:47 9 July 2010

compared with the existing condition. Thus, we are going to select 17 fire station
sites out of 63 candidate sites in such a way that the total service area is maximal.
4.2 Service area computation
Service area polygons of fire stations are generated using the new service area
function in ArcGIS Network Analyst extension. There are two types of network
nodes in this function – facilities and barriers. Candidate sites of fire stations shown
in figure 6 are loaded as facilities in the service area computation. The service area is
defined as travel time zones away from facilities. Some necessary parameters must
be set first, such as in which band the travel time zones will be generated, how the
polygon should be constructed, and what restrictions should be applied. In this case,
the zones are generated within 4 min travel time, slightly faster than the standard
5 min travel time used in the country. For the one-way restriction, according to the
local regulation, on duty fire vehicles and ambulances are allowed to traverse
Figure 6. Candidate facility sites.
224 V. Indriasari et al.
Downloaded By: [2009 Universiti Putra Malaysia] At: 02:47 9 July 2010

a one-way road in the opposite direction and exempted from turn restrictions.
Therefore one-way restriction is unnecessary to be applied (unchecked).
The facilities are not located exactly on the network. In a network analysis, a
facility must be linked to the nearest point on the network edge to become a network
node, before its service area can be generated. Hence, we use the search tolerance
parameter to determine the radius within which the facilities will be linked to the
network edge. If with 100 m search tolerance some facilities are not linked because
they have no network within the distance, this value needs to be increased until all
facilities are linked. Parameter settings for the service area computation are shown
in table 2.
Some information must be prepared prior to the optimal site search process. These
include the discretization of demand entity from planar space into regular points to
implement the formulated mathematical model. For this study, the spacing of demand
points was set to 200 m which results in a total 3614 demand points. To obtain
information of aij required in the mathematical model, the ‘Spatial Join’ function in
ArcGIS was utilized. This function analyzed whether the demand points fall within
the service area polygons of facilities. One demand point might fall within many
service area polygons. Likewise, one service area polygon might contain many
demand points. If the row of a pair of demand point i – facility j exists, the value of aij
in equation (6) will equal to 1, indicating that demand point i is covered by facility j.
4.3 Results
The location modeling was loosely-coupled with the GIS. That is, all the necessary
data were exported from the GIS into an external database. Following this, the
heuristics were run outside GIS using this database, and finally, the outputs were
sent back to GIS for visualization and area calculation. All heuristics were coded in
Perl programming language and executed on a computer environment with Intel
Core 2 Duo 1.73 GHz processor and 2 GB RAM. Since GA and SA are stochastic
procedures, they were run multiple times to study their robustness in producing
Table 2. Parameter settings for service area computation.
Parameters Value
Network LocationsLocation type FacilitiesSearch tolerance 100 mSnap to Closest
Analysis settingsImpedance MinutesDefault breaks 4Direction Away From FacilitiesAllow U-turns EverywhereIgnore invalid locations checkedOneway restriction unchecked
Polygon GenerationPolygon type DetailedTrim polygons 100 mMultiple facilities options OverlappingOverlap type Disks
Maximal service area problem 225
Downloaded By: [2009 Universiti Putra Malaysia] At: 02:47 9 July 2010

good solutions. In this case, each of them was run five times. Results of five tests
using these two heuristics are shown in table 3. It is seen that on average, GA wasbetter in term of solution quality, but SA was slightly faster in terms of computation
time. The average of coverage achieved by GA is 2997.8 while the average of
coverage achieved by SA is 2729.8. The average of time consumed by GA is
51.17 min. In all tests, the algorithm terminated after completing the maximum 50
generations. The average of time consumed by SA is 47.49 min, with numbers of
iterations elapsed varying amongst tests.
Of three heuristics applied, TS appears to be the best both in term of solution
quality and computation time. By implementing only short-term memory process,TS managed to complete 50 iterations in 3.72 min and yielded 3010 coverage.
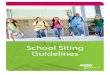
Comparison of performance between GA, TS and SA is shown in figure 7. The
coverage and time of GA and SA are taken from their best solutions of all tests
conducted, i.e. Test 1 for GA and Test 5 for SA. The graph depicts the coverage
achieved by each heuristic over time.
The objective function of the MSAP in equation (5), z, is defined as the number of
demand points falling within the service area polygons of a set of facilities. Since the
Table 3. Comparison of performance between GA and SA in five tests.
Test
GA SA
Coverage Time (min) Coverage Time (min)
1 3001 50.60 2733 50.782 2990 50.87 2639 44.023 3001 50.72 2709 46.584 2998 52.38 2673 43.655 2999 51.28 2895 52.42Average 2997.8 51.17 2729.8 47.49
Figure 7. Comparison of performance between GA, TS and SA.
226 V. Indriasari et al.
Downloaded By: [2009 Universiti Putra Malaysia] At: 02:47 9 July 2010

value of z only acts as the surrogate information to measure the total service area,
we need to calculate the actual area of demand region covered to verify how close
the z value reflects the total service area. The area calculation was done in the GIS
and the result is shown in table 4. For this calculation, service area polygons of the
facilities were dissolved into a single polygon, and then clipped by the study area
polygon to remove parts of the polygon lying outside the study area. As was
expected, for facility sets obtained by all heuristics, percentages based on the area of
demand region covered A are slightly different from (mostly lower than) percentages
based on z value. This also occurs to the existing coverage. Yet their differences d are
very small, around 0.1%. This is due to relatively fine resolution of points used for
discretization of demand region.
Maps of coverage area from all heuristics are shown in figure 8. It can be seen that
the sets of facility sites gained by GA and TS are nearly the same. There are only two
differences – sites 15 and 51 in GA set do not exist in TS set, and are replaced by
sites 3 and 45. SA set differs enough from the others. It only has six sites in common,
i.e. sites 9, 17, 27, 32, 44 and 61. This is no wonder as the coverage of GA and TS is
quite close, while coverage of SA is a bit far below them. All heuristics managed to
provide better coverage than the existing coverage. Based on A values, GA provided
an increase of 9.26%, TS did 9.51% and SA did 6.48%. In GA and TS coverage, Site
23 and 24 appear to provide a significant increase of coverage in the southern part of
the study area.
5. Conclusions
Through the use of GIS, this study has been able to extend the conventional facility
location models that employed concentric circle analysis to a more complex and
realistic model – the MSAP. By taking advantage of GIS capability to calculate the
service area as the travel time zones, the model takes into account the road
accessibility in the selection of facility locations. GIS simulates the real road
network of the area being analyzed. Hence the solution gained by using GIS is more
accurate than otherwise.
The objective of the MSAP is to achieve a maximal total service area from a
specified number of facilities. Calculation of total service areas from multiple
facilities cannot be done merely by creating simple summary of service area
polygons, as the polygons are overlaid one on top another. This study has managed
to solve this issue by dividing the planar space of demand region into discrete
regular points. The use of regular points as the surrogate information to measure the
total service area was introduced as an alternative method of calculation. The
method was found to be helpful to ease the implementation of mathematical
modeling of the MSAP. Using points for discretization instead of polygons also
Table 4. Comparison of coverage between existing and three heuristics based on the numberof demand points covered (z) and area of demand region covereda.
Facility set z A (km2) d (%)
Existing 2668 (73.82%) 106.41 (73.69%) 0.13GA 3001 (83.04%) 119.78 (82.95%) 0.09TS 3010 (83.29%) 120.15 (83.20%) 0.09SA 2895 (80.11%) 115.76 (80.17%) 20.06
aTotal number of demand points53614; total area of demand region5144.40 km2
Maximal service area problem 227
Downloaded By: [2009 Universiti Putra Malaysia] At: 02:47 9 July 2010

obviates the issue of partial coverage. In a fine resolution of demand points, thepercentage of total service area based on the number of demand points covered is
very close to the percentage based on the area of demand region covered. Hence, the
Figure 8. Coverage area of existing fire stations and three heuristics: (a) existing coverage;(b) coverage by GA; (c) coverage by TS; (d) coverage by SA.
228 V. Indriasari et al.
Downloaded By: [2009 Universiti Putra Malaysia] At: 02:47 9 July 2010

aforementioned method of calculation may be conveniently applied to measure the
solution quality of the problem.
Fire stations in South Jakarta, Indonesia, were chosen to implement the MSAP.
Three heuristics, GA, TS and SA, have been applied to solve the optimization
problem of the MSAP. Of three heuristics applied, TS was the most superior both in
term of solution quality and computation time. It reached 83.20% coverage in
3.73 min only. GA and SA were comparable in computation time, but GA was
better in solution quality. The best solution of GA reached 82.95% coverage in
50.60 min, and the best solution of SA reached 80.17% coverage in 52.42 min. Hence
all three heuristics managed to provide better coverage than the existing coverage
which only reaches 73.82%, with 17 fire stations within 4 min travel time.
ReferencesAERTS, J.C.J.H. and HEUVELINK, G.B.M., 2002, Using simulated annealing for resource
allocation. International Journal of Geographical Information Science, 16(6), pp.
571–587.
ALY, A.A. and WHITE, J.A., 1978, Probabilistic formulations of the emergency service
location problems. The Journal of the Operational Research Society, 29(12), pp.
1167–1179.
CHAN, F.T.S. and KUMAR, N., 2009, Effective allocation of customers to distribution centres:
A multiple ant colony optimization approach. Robotics and Computer-Integrated
Manufacturing, 25(1), pp. 1–12.
CHRISSIS, J.W., 1980, Locating emergency service facilities in a developing area. Fire
Technology, 16(1), pp. 63–69.
CHURCH, R.L. and REVELLE, C., 1974, The maximal covering location problem. Papers of the
Regional Science Association, 32(1), pp. 101–118.
CHURCH, R.L. and SORENSEN, P., 1996, Integrating normative location models into GIS:
Problems and prospects with the p-median model. In Spatial Analysis: Modelling in a
GIS Environment, P.A. Longley and M. Batty (Eds), pp. 167–183 (Cambridge:
Geoinformation International).
D’AMICO, S.J., 2002, A simulated annealing approach to police district design. Computers &
Operations Research, 29(6), pp. 667–684.
DE SMITH, M.J., GOODCHILD, M.F. and LONGLEY, P.A., 2007, Geospatial Analysis: A
Comprehensive Guide to Principles, Techniques and Software Tools (Leicester:
Matador).
HAMACHER, H.W. and NICKEL, S., 1998, Classification of location models. Location Science,
6, pp. 229–242.
HOGG, J.M., 1968, The siting of fire stations. Operational Research Quarterly, 19(3), pp.
275–287.
JAEGGI, D.M., PARKS, G.T., KIPOUROS, T. and CLARKSON, P.J., 2008, The development of a
multi-objective tabu search algorithm for continuous optimisation problems.
European Journal of Operational Research, 185(3), pp. 1192–1212.
JARAMILLO, J.H., BHADURY, J. and BATTA, R., 2002, On the use of genetic algorithms to solve
location problems. Computers & Operations Research, 29(6), pp. 761–779.
KLOSE, A. and DREXL, A., 2005, Facility location models for distribution system design.
European Journal of Operational Research, 162(1), pp. 4–29.
LI, X. and YEH, A.G., 2005, Integration of genetic algorithms and gis for optimal location
search. International Journal of Geographical Information Science, 19(5), pp. 581–601.
LIU, N., HUANG, B. and CHANDRAMOULI, M., 2006, Optimal siting of fire stations using GIS
and ant algorithm. Journal of Computing in Civil Engineering, 20(5), pp. 361–369.
LONGLEY, P.A., GOODCHILD, M.F., MAGUIRE, D.J. and RHIND, D.W., 2005, Geographic
Information Systems and Science (England: John Wiley & Sons).
Maximal service area problem 229
Downloaded By: [2009 Universiti Putra Malaysia] At: 02:47 9 July 2010

MILLER, H.J., 1996, GIS and geometric representation in facility location problems.
International Journal of Geographical Information Systems, 10(7), pp. 791–816.
MURRAY, A.T. and CHURCH, R.L., 2004, Applying simulated annealing to location-planning
models. Journal of Heuristics, 2(1), pp. 31–53.
MURRAY, A.T. and O’KELLY, M.E., 2002, Assessing representation error in point-based
coverage modeling. Journal of Geographical Systems, 4(2), pp. 171–191.
MURRAY, A.T. and TONG, D., 2007, Coverage optimization in continuous space facility
siting. International Journal of Geographical Information Science, 21(7), pp. 757–776.
MURRAY, A.T., O’KELLY, M.E. and CHURCH, R.L., 2008, Regional service coverage
modeling. Computers & Operations Research, 35(2), pp. 339–355.
REVELLE, C. and SNYDER, S., 1995, Integrated fire and ambulance siting: A deterministic
model. Socio-Economic Planning Sciences, 29(4), pp. 261–271.
SCHIETZELT, T.H. and DENSHAM, P.J., 2003, Location-allocation in GIS. In Advanced Spatial
Analysis: The CASA book of GIS, P.A. Longley and M. Batty (Eds), pp. 345–365
(Redlands, CA: ESRI Press).
SIVANANDAM, S.N. and DEEPA, S.N., 2007, Introduction to Genetic Algorithms (Berlin:
Springer).
SUN, M., 2006, Solving the uncapacitated facility location problem using tabu search.
Computers & Operations Research, 33(9), pp. 2563–2589.
TOREGAS, C. and REVELLE, C., 1972, Optimal location under time or distance constraints.
Papers of the Regional Science Association, 28(1), pp. 131–143.
TOREGAS, C., SWAIN, R., REVELLE, C. and BERGMAN, L., 1971, The location of emergency
service facilities. Operations Research, 19(6), pp. 1363–1373.
WANG, F., 2006, Quantitative Methods and Application in GIS (Boca Raton, FL: CRC Press,
Taylor & Francis).
YEH, A.G. and COW, M.H., 1996, An integrated GIS and location-allocation approach to
public facilities planning – An example of open space planning. Computers,
Environment and Urban Systems, 20(4/5), pp. 339–350.
ZECCHIN, A.C., SIMPSON, A.R., MAIER, H.R., LEONARD, M., ROBERTS, A.J. and
BERRISFORD, M.J., 2006, Application of two ant colony optimisation algorithms to
water distribution system optimisation. Mathematical and Computer Modelling, 44(5–
6), pp. 451–468.
230 Maximal service area problem
Downloaded By: [2009 Universiti Putra Malaysia] At: 02:47 9 July 2010