Embed Size (px)
Citation preview

1/72
Matrix Method for Coordinates Transformation
Toshimi Taki
January 10, 2002
Revision A: February 17, 2002
Revision B: December 21, 2002
Revision C: January 11, 2003
Revision D: November 22, 2003
Table of Contents
1. Introduction....................................................................................................................... 3
2. References......................................................................................................................... 3
3. Notations ........................................................................................................................... 3
3.1 Note .............................................................................................................................. 3
3.2 Symbols ....................................................................................................................... 3
4. Basic Equations of Coordinates Transformation in Matrix Method............................ 5
4.1 Polar Coordinates and Rectangular Coordinates ................................................... 5
4.2 Coordinate Transformation........................................................................................ 8
4.2.1 New Coordinate System Rotated around Z-axis............................................... 8
4.2.2 New Coordinate System Rotated around X-axis .............................................. 9
4.2.3 New Coordinate System Rotated around Y-axis ............................................ 10
4.3 Obtaining Polar Coordinates from Direction Cosine............................................ 11
4.4 Notes on Approximation .......................................................................................... 12
4.4.1 Approximation of Trigonometric Functions.................................................... 12
4.4.2 Approximation of Other Functions................................................................... 12
5. Applications .................................................................................................................... 13
5.1 Transformation from Equatorial Coordinates to Altazimuth Coordinates ......... 13
5.1.1 Transformation Equations................................................................................. 13
5.1.2 Example Calculation .......................................................................................... 15
5.2 Angular Separation................................................................................................... 18
5.2.1 Equations ............................................................................................................ 18
5.2.2 Example Calculation .......................................................................................... 19
5.3 Compensation of Mounting Fabrication Errors..................................................... 21
5.3.1 Telescope Coordinates ...................................................................................... 21

2/72
5.3.2 Fabrication Errors of Mount.............................................................................. 21
5.3.3 Derivation of Equations..................................................................................... 22
5.3.4 Apparent Telescope Coordinate without Approximation .............................. 24
5.3.5 Example Calculations ........................................................................................ 28
5.4 Equations for Pointing Telescope........................................................................... 32
5.4.1 Introduction......................................................................................................... 32
5.4.2 Transformation Matrix........................................................................................ 33
5.4.3 Derivation of Transformation Matrix ................................................................ 34
5.4.4 Example Calculation .......................................................................................... 37
5.5 Polar Axis Misalignment Determination................................................................. 42
5.5.1 Derivation of Equations..................................................................................... 42
5.5.2 Example Calculations ........................................................................................ 52
5.6 Dome Slit Synchronization ...................................................................................... 62
5.6.1 Object in First Quadrant .................................................................................... 63
5.6.2 Object in Second Quadrant............................................................................... 65
5.6.3 Object in Third Quadrant................................................................................... 67
5.6.4 Object in Fourth Quadrant ................................................................................ 69
5.6.5 Intersection ......................................................................................................... 71

3/72
1. Introduction
Coordinates transformation is a basic part of astronomical calculation and spherical
trigonometry has been long used for astronomical calculation in amateur astronomy.
Spherical trigonometry equations can be a little bit difficult for amateurs to understand.
In the last two decades, development of personal computers has brought about a change in
the way astronomical calculations are carried out. In my opinion, spherical trigonometry is
not appropriate to astronomical calculation using personal computers. I recommend the
matrix method for coordinates transformation, because of its simplicity and ease of
generalization in writing computer programs.
In this monograph, I describe coordinates transformation using the matrix method. I also
extend the method to some specific applications, such as polar axis misalignment
determination of equatorial mount (Challis’ method) and a telescope pointing algorithm.
2. References
[1] Jean Meeus, “Astronomical Formulae for Calculators,” 1985, Willmann-Bell, Inc.
[2] Jean Meeus, “Astronomical Algorithms,” 1991, Willmann-Bell, Inc.
[3] Ko Nagasawa, “Calculation of Position of Astronomical Objects,” 1985, Chijin-Shokan
Co., in Japanese
[4] W. R. Vezin, “Polar Axis Alignment of Equatorial Instrument”
[5] Rev. James Challis, “Lectures on Practical Astronomy and Astronomical Instruments,”
1879.
[6] Toshimi Taki, “A New Concept in Computer-Aided Telescopes," Sky & Telescope,
February 1989, pp.194-196.
3. Notations
3.1 Note
In this monograph, angles are expressed in radian, because all computer languages for
personal computers use radian for trigonometric functions.
3.2 Symbols
Following symbols are used in this monograph.
X-Y-Z : General rectangular coordinate system

4/72
Xe-Ye-Ze : Rectangular equatorial coordinate system
Xh-Yh-Zh : Rectangular altazimuth coordinate system
Xt-Yt-Zt : Rectangular telescope coordinate system
α : Right Ascension (in radian)
δ : Declination (in radian)
A : Azimuth, measured westward from the South. (in radian)
h : Altitude (in radian)
ξ : General polar coordinate measured counterclockwise from X-axis in XY-plane (in
radian)
ζ : General polar coordinate, measured upward from XY-plane. (in radian)
ϕ, θ : Telescope polar coordinates (in radian)
∆, ∆', ∆" : Telescope mount fabrication errors (in radian)
L : X-component of direction cosine of celestial object in X-Y-Z coordinates
M : Y-component of direction cosine of celestial object in X-Y-Z coordinates
N : Z-component of direction cosine of celestial object in X-Y-Z coordinates
H : Hour angle
φ : Observer’s latitude
θ0 : Sidereal time at Greenwich
t : Time
u, v : Telescope polar axis misalignment (in radian)
JD : Julian day number
d : Angular distance between two objects
[T] : Transformation matrix between coordinate systems
R : Atmospheric refraction (in radian)

5/72
4. Basic Equations of Coordinates Transformation in Matrix Method
4.1 Polar Coordinates and Rectangular Coordinates
In astronomical calculations, polar coordinate systems are usually used. See figure 4-1.
Point O is the observation point. Vector OR shows unit vector directing to a celestial object.
The position of the celestial object is express in polar coordinates (ξ, ζ). Normally, angle ξ is
measured counterclockwise from X-axis (viewing from positive Z) and angle ζ is measured
upward (toward Z-axis) from XY-plane.
Figure 4-1 Polar Coordinates and Rectangular Coordinates
An example of polar coordinates is right ascension and declination, (α, δ). See figure 4-2.
The other example is azimuth and altitude, (A, h). But azimuth is measured westward
(clockwise) from the South which is the opposite direction to the normal polar coordinate
system. See figure 4-3.
YX
Z Celestial Object
O
R (L,M,N)
Sphere with radius = 1
ζ
ξ
YX
Z Celestial Object
O
R (L,M,N)
Sphere with radius = 1
ζ
ξ

6/72
Figure 4-2 Equatorial Coordinates
Figure 4-3 Altazimuth Coordinates
Ye
Xe (Vernal Equinox)
Ze (Celestial North Pole)Celestial Object
O
R (Le,Me,Ne)
δ
α
Celestial Equator
Ye
Xe (Vernal Equinox)
Ze (Celestial North Pole)Celestial Object
O
R (Le,Me,Ne)
δ
α
Celestial Equator
Yh (East)
Xh (South)
Zh (Zenith) Celestial Object
O
R (Lh,Mh,Nh)
hA
Horizon
Yh (East)
Xh (South)
Zh (Zenith) Celestial Object
O
R (Lh,Mh,Nh)
hA
Horizon

7/72
The vector OR is also expressed in rectangular coordinates, (L, M, N). (L, M, N) is called
direction cosine. In the matrix method, direction cosines are used to express coordinate
transformation.
Relationship between rectangular coordinates and polar coordinates can be expressed in
matrix form as follows.
=
ζξζξζ
sin
sincos
coscos
N
M
L
…. Equation (4-1)
For equatorial coordinates,
=
δαδαδ
sin
sincos
coscos
e
e
e
N
M
L
…. Equation (4-2)
For horizontal coordinates,
−−
=
h
Ah
Ah
N
M
L
h
h
h
sin
)sin(cos
)cos(cos
…. Equation (4-3)
Note that (-A) is used in the equation (4-3) instead of A, because azimuth A is measured
clockwise.

8/72
4.2 Coordinate Transformation
4.2.1 New Coordinate System Rotated around Z-axis
New coordinate system, X’-Y’-Z’ is generated rotating X-Y-Z coordinates around Z-axis as
shown in figure 4-4.
The polar coordinates in X’-Y’-Z’ coordinate system is (ξ’, ζ’) and the direction cosine in
X’-Y’-Z’ coordinate system is (L’, M’, N’). The relationship between the direction cosines in
both coordinate systems is expressed as follows.
=
'sin
'sin'cos
'cos'cos
'
'
'
ζξζξζ
N
M
L
…. Equation (4-4)
−=
N
M
L
N
M
L
zz
zz
100
0cossin
0sincos
'
'
'
θθθθ
…. Equation (4-5)
−=
'
'
'
100
0cossin
0sincos
N
M
L
N
M
L
zz
zz
θθθθ
…. Equation (4-6)
Figure 4-4 Coordinates Rotation around Z-axis
X
X’
Y
Y’
OR : unit vector
L
M
L’M’
O
θz (rotate counterclockwise around Z-axis)
R
Looking Normal to XY-plane
X
X’
Y
Y’
OR : unit vector
L
M
L’M’
O
θz (rotate counterclockwise around Z-axis)
R
Looking Normal to XY-plane

9/72
4.2.2 New Coordinate System Rotated around X-axis
New coordinate system, X’’-Y’’-Z’’ is generated rotating X-Y-Z coordinates around X-axis as
shown in figure 4-5.
The polar coordinates in X’’-Y’’-Z’’ coordinate system is (ξ’’, ζ’’) and the direction cosine in
X’’-Y’’-Z’’ coordinate system is (L’’, M’’, N’’). Then the relationship between the direction
cosines in both coordinate systems is expressed as follows.
=
''sin
''sin''cos
''cos''cos
''
''
''
ζξζξζ
N
M
L
…. Equation (4-7)
−=
N
M
L
N
M
L
xx
xx
θθθθ
cossin0
sincos0
001
''
''
''
…. Equation (4-8)
−=
''
''
''
cossin0
sincos0
001
N
M
L
N
M
L
xx
xx
θθθθ …. Equation (4-9)
Figure 4-5 Coordinates Rotation around X-axis
Y
Y’’
Z
Z’’
OR : unit vector
M
N
M’’N’’
O
θx (rotate counterclockwise around X-axis)
R
Looking Normal to YZ-plane
Y
Y’’
Z
Z’’
OR : unit vector
M
N
M’’N’’
O
θx (rotate counterclockwise around X-axis)
R
Looking Normal to YZ-plane

10/72
4.2.3 New Coordinate System Rotated around Y-axis
New coordinate system, X’’’-Y’’’-Z’’’ is generated rotating X-Y-Z coordinates around Y-axis
as shown in figure 4-6.
The polar coordinates in X’’’-Y’’’-Z’’’ coordinate system is (ξ’’’, ζ’’’) and the direction cosine
in X’’’-Y’’’-Z’’’ coordinate system is (L’’’, M’’’, N’’’). Then the relationship between the
direction cosines in both coordinate systems is expressed as follows.
=
''''sin
''''sin''''cos
''''cos'''cos
'''
'''
'''
ζξζξζ
N
M
L
…. Equation (4-10)
−=
N
M
L
N
M
L
yy
yy
θθ
θθ
cos0sin
010
sin0cos
'''
'''
'''
…. Equation (4-11)
−=
'''
'''
'''
cos0sin
010
sin0cos
N
M
L
N
M
L
xy
yy
θθ
θθ …. Equation (4-12)
Figure 4-6 Coordinates Rotation around Y-axis
Z
Z’’’
X
X’’’
OR : unit vector
N
L
N’’’
L’’’
O
θy (rotate counterclockwise around Y-axis)
R
Looking Normal to ZX-plane
Z
Z’’’
X
X’’’
OR : unit vector
N
L
N’’’
L’’’
O
θy (rotate counterclockwise around Y-axis)
R
Looking Normal to ZX-plane

11/72
4.3 Obtaining Polar Coordinates from Direction Cosine
After coordinate transformation using the matrix method it is necessary to obtain the polar
coordinates (ξ’, ζ’) from the direction cosines.
Using equation (4-4), ξ’ and ζ’ are obtained from direction cosines as shown below.
''
'tanLM
=ξ …. Equation (4-13)
When L’ >= 0, ξ’ is in the 1st quadrant or the 4th quadrant.
When L’ < 0, ξ’ is in the 2nd quadrant or the 3rd quadrant.
''sin N=ζ …. Equation (4-14)
-π/2 (-90o) <= ζ’ <= +π/2 (+90o)

12/72
4.4 Notes on Approximation
4.4.1 Approximation of Trigonometric Functions
When we process small angles in trigonometry, approximation of trigonometric functions is
often used.
In the following approximations, θ is very small angle and expressed in radian.
θθ ≅sin …. Equation (4-15)
1cos ≅θ …. Equation (4-16)
For higher order approximation,
21cos
2θθ −≅ …. Equation (4-17)
4.4.2 Approximation of Other Functions
For other functions, following approximation can be used when x is very small compared to
1.
211
xx +≅+ …. Equation (4-18)
( ) xx 211 2 +≅+ …. Equation (4-19)

13/72
5. Applications
5.1 Transformation from Equatorial Coordinates to Altazimuth Coordinates
5.1.1 Transformation Equations
Altazimuth coordinate system, Xh-Yh-Zh is rotated –(π/2 - φ) around Yh-axis to equatorial
coordinate system, Xe’-Ye’-Ze’. φ is observer’s latitude. See figure 5.1-1.
The direction cosines are expressed in angles as follows.
−−
=
h
Ah
Ah
N
M
L
h
h
h
sin
)sin(cos
)cos(cos
…. Equation (5.1-1)
Where A is azimuth measured westward from the South and h is altitude.
−−
=
δδδ
sin
)sin(cos
)cos(cos
'
'
'
H
H
N
M
L
e
e
e
…. Equation (5.1-2)
Where H is local hour angle measure westward from the South and δ is declination.
Relationship between the coordinates is expressed in matrix form as shown below.
−
−
−−
−
=
h
h
h
e
e
e
N
M
L
N
M
L
2cos0
2sin
0102
sin02
cos
'
'
'
πφ
πφ
πφ
πφ
…. Equation (5.1-3)
−
−−
−
−
=
'
'
'
2cos0
2sin
0102
sin02
cos
e
e
e
h
h
h
N
M
L
N
M
L
πφ
πφ
πφ
πφ
…. Equation (5.1-4)
h
h
L
MA =− )tan( …. Equation (5.1-5)
When Lh >= 0, (-A) is in the 1st quadrant or the 4th quadrant.
When Lh < 0, (-A) is in the 2nd quadrant or the 3rd quadrant.
hNh =sin …. Equation (5.1-6)

14/72
-π/2 (-90o) <= h <= +π/2 (+90o)
Figure 5.1-1 Altazimuth Coordinates and Equatorial Coordinates
Comparison with spherical trigonometric equations (ref. [1]) is performed below.
From equations (5.1-2), (5.1-4) and (5.1-5), we obtain the following equations.
δφφ
δπ
φπ
φ
δπ
φδπ
φ
δ
πφ
πφ
tancoscossin)sin(
tan2
sin)cos(2
cos
)sin(
sin2
sincos)cos(2
cos
cos)sin(
'2
sin'2
cos
')tan(
−−
=
−+−
−
−=
−+−
−
−=
−+
−
=−
HH
H
H
H
H
NL
MA
ee
e
…. Equation (5.1-7)
Yh, Ye’ (East)
Xh (South)
Zh (Zenith)Celestial Object
O
Ze’ (North Pole)
Xe’ (Meridian)
φ-H
Equator
Horizon
Meridian
Yh, Ye’ (East)
Xh (South)
Zh (Zenith)Celestial Object
O
Ze’ (North Pole)
Xe’ (Meridian)
φ-H
Equator
Horizon
Meridian

15/72
δφδφ
δπ
φδπ
φ
sinsincoscoscos
sin2
coscos)cos(2
sinsin
+=
−+−
−−=
H
Hh …. Equation (5.1-8)
These equations are the same as equations (8.5) and (8.6) in ref. [1].
5.1.2 Example Calculation
Example 8.b in ref. [1]:
Find the azimuth and the altitude of Saturn on 1978 November 13 at 4h34m00s UT at the
Uccle Observatory (longitude –0h17m25.94s, latitude +50o47’55.0” = 0.88660302 (radian)); the
planet’s apparent equatorial coordinates, interpolated from the A.E., being
α = 10h57m35.681s = 10.9599114h = 2.86929809 (radian)
δ = +8o25’58.10” = 8.432806o = 0.14718022 (radian)
The apparent sidereal time at Greenwich, θ0 = 8h01m46.135s.
Local hour angle, H is,
H = θ0 - L - α
= 8h01m46.135s + 0h17m25.94s – 10h57m35.681s
= -2h38m23.606s
= -2.6398906h
= -2.6398906 x 15 / (180/π) … (radian)
= -0.69112174 (radian)
From equation (5.1-2),
=
−−
=
14664943.0
63051067.0
76220092.0
sin
cos)sin(
cos)cos(
'
'
'
δδδ
H
H
N
M
L
e
e
e
From equation (5.1-4),

16/72
=
−=
−−−
−−=
−
−−
−
−
=
59539056.0
63051067.0
49796223.0
14664943.0
63051067.0
76220092.0
77492917.0063204809.0
010
63204809.0077492917.0
14664943.0
63051067.0
76220092.0
)68419331.0cos(0)68419331.0sin(
010
)68419331.0sin(0)68419331.0cos(
'
'
'
2cos0
2sin
0102
sin02
cos
e
e
e
h
h
h
N
M
L
N
M
L
πφ
πφ
πφ
πφ
From equations (5.1-5) and (5.1-6),
2661817.149796223.063051067.0
)tan( ===−h
h
L
MA
-A = 0.90232066 (radian) à A = -0.9032066 (radian) = -51.6992o
sin h = 0.59539056
h = 0.63775167 (radian) = 36.5405o

17/72
Figure 5.1-2 Hour Angle and Sidereal Time
Looking from North Pole Normal to Equatorial Plane
Xe (Vernal Equinox)
Ye
Ye’
O
Xe’ (Meridian)
α: Right Ascension
H: Hour Angle
θ : Local Sidereal Time
Celestial Object
Looking from North Pole Normal to Equatorial Plane
Xe (Vernal Equinox)
Ye
Ye’
O
Xe’ (Meridian)
α: Right Ascension
H: Hour Angle
θ : Local Sidereal Time
Celestial Object

18/72
5.2 Angular Separation
5.2.1 Equations
The angular distance d between two celestial objects, P1 and P2 is derived using the matrix
method.
Position of object 1, P1: (ξ1, ζ1)
Position of object 2, P2: (ξ2, ζ2)
Direction cosines of the two objects are,
=
1
11
11
1
1
1
sin
sincos
coscos
ζξζξζ
N
M
L
…. Equation (5.2-1)
=
2
22
22
2
2
2
sin
sincos
coscos
ζξζξζ
N
M
L
…. Equation (5.2-2)
Using scalar product of the two unit vectors, 1OP and 2OP , angular separation d is
obtained as follows. See figure 5.2-1.
)cos(coscossinsin
sinsincoscossinsincoscoscoscos
cos
212121
2121212121
212121
ξξςςςςςςςςξξςςξξ
−+=++=
++= NNMMLLd
…. Equation (5.2-3)
This equation is identical to equation (9.1) in ref. [1].
Figure 5.2-1 Angular Separation
OP1
P2
d
OP1
P2
d

19/72
When angular separation is very small, (ξ1-ξ2) and (ζ1-ζ2) are nearly zero and equation
(5.2-2) can not be used. Equation (5.2-2) is transformed to a new equation as follows.
( )
( )
( )
( ) ( )ς
ξς
ςξ
ς
ςςξ
ςςςς
ξςςςς
ξςςςς
222
22
21
2
2121
2
2121
2121
cos22
1
cos2
cos
coscos2
coscossinsin
21coscossinsin
coscoscossinsincos
∆−
∆−≅
∆−∆=
∆−+=
∆−+≅
∆+=d
Where 2
21 ςςς
−=
( ) ( ) ( )ς
ξς 2222
cos22
12
1
cos
∆−
∆−≅
∆−≅
d
d
( ) ( ) ( ) ςξς 2222 cos∆−∆≅∆d
( ) ( )22cos ςςξ ∆+⋅∆=d …. Equation (5.2-4)
Note: When θ is very small, the following approximation can be used.
21cos
2θθ −≅ (in radian)
5.2.2 Example Calculation
Example 9.a in ref. [1]:
Calculate the angular distance, d between Arcturus and Spica.
The 1950 coordinates of these stars are,
Arcturus : α1 = 14h13m22.8s = 213.3450o = 3.72357269 δ1 = +19o26’31” = 0.33932594
Spica : α2 = 13h22m33.3s = 200.6388o = 3.50180767 δ2 = -10o54’03” = -0.19025543

20/72
−−
=
=
33285154.0
51833597.0
78774214.
sin
sincos
coscos
1
11
11
1
1
1
δαδαδ
N
M
L
−−−
=
=
18910972.0
34611538.0
91893507.0
sin
sincos
coscos
2
22
22
2
2
2
δαδαδ
N
M
L
84034247.0
)18910972.0(33285154.0
)34611538.0()51833597.0()91893507.0(78774214.0
cos 212121
=−×+
−×−+−×−=++= NNMMLLd
d = 0.57288162 (radian) = 32.8237o

21/72
5.3 Compensation of Mounting Fabrication Errors
5.3.1 Telescope Coordinates
A telescope has telescope coordinate system as shown in figure 5.3-1. True telescope polar
coordinates is (ϕ, θ). “True” means that we consider hypothetical perfect telescope mount
without fabrication error.
If the Xt-axis points to the South and Zt-axis points to zenith, this mount is an alt-azimuth
mount.
A−=ϕ
h=θ
If the Zt-axis points to celestial north pole and Xt-axis points to meridian, this mount is an
equatorial mount.
H−=ϕ
δθ =
Figure 5.3-1 Telescope Coordinates
5.3.2 Fabrication Errors of Mount
In the real world all mountings have fabrication errors. There are three different fabrication
errors to be considered as shown in figure 5.3-2.
(1) ∆: Error in perpendicularity between horizontal axis and vertical axis, or polar axis
Xt
Yt
Zt
«
ϕ: Horizontal Angle
θ: Elevation Angle
Xt
Yt
Zt
«
ϕ: Horizontal Angle
θ: Elevation Angle

22/72
and declination axis
(2) ∆’: Collimation error between vertical or polar axis and telescope optical axis
(3) ∆’’: Shift of zero point in apparent elevation angle or declination angle
Figure 5.3-2 Telescope Mount Fabrication Error
5.3.3 Derivation of Equations
The apparent telescope coordinates (ϕ’, θ’) is the coordinates measured with setting circles
of the telescope mount. Relationship between the true telescope coordinates and the
apparent telescope coordinates are derived as follows. See figures 5.2-3 to 5.2-5.
(1) Telescope optical axis, R’’’-axis points to a celestial object of true telescope
coordinates (ϕ, θ). R’’’S’’’-plane is the plane defined by telescope optical axis and
telescope vertical axis. This means that direction cosines of the celestial object in
R’’’-S’’’-T’’’ coordinates is
0
0
1
.
∆
∆’
θ’’ + ∆”
Telescope Optical Axis
Telescope Vertical Axis
Telescope Horizontal Axis
∆
∆’
θ’’ + ∆”
∆
∆’
θ’’ + ∆”
Telescope Optical Axis
Telescope Vertical Axis
Telescope Horizontal Axis

23/72
(2) The coordinate system R’’’-S’’’-T’’’ is rotated –∆’ counterclockwise around T’’’-axis and
becomes a new coordinate system R’’-S’’-T’’.
(3) The coordinate system R’’-S’’-T’’ is rotated (θ’+∆’’) counterclockwise around S’’-axis
and becomes R’-S’-T’ coordinate system.
(4) The coordinate system R’-S’-T’ is rotated -∆ counterclockwise around R’-axis and
becomes R-S-T coordinate system.
(5) Finally, the coordinate system R-S-T is rotated –ϕ’ counterclockwise around T-axis and
becomes X-Y-Z coordinate system which is the true telescope coordinates.
∆∆+∆∆∆+∆∆∆+−∆∆+∆∆+∆∆∆++∆∆−∆∆+
=
∆∆∆−∆
∆+∆+
∆+−∆+×
∆∆∆−∆
−=
'sinsin'coscos)'''sin(
'cossin'cos)'''sin('sincos'cos'cos'sin)'''cos(
'cossin'sin)'''sin('sincos'sin'cos'cos)'''cos(
0
0
1
100
0'cos'sin
0'sin'cos
)'''cos(0)'''sin(
010
)'''sin(0)'''cos(
cossin0
sincos0
001
100
0'cos'sin
0'sin'cos
sin
sincos
coscos
θϕθϕϕθϕθϕϕθ
θθ
θθ
ϕϕϕϕ
θϕθϕθ
…. Equation (5.3-1)
Equation (5.3-1) is an exact solution to obtain true telescope coordinate from apparent
telescope coordinate.
Using the following approximation,
'cossincossin'cossin'cos)'''sin(,'sincoscos'sincos'cos
'cossinsinsin'cossin'sin)'''sin(,'sincossin'sincos'sin
∆∆≈∆∆∆+∆∆≈∆∆∆∆≈∆∆∆+∆∆≈∆∆
ϕθϕθϕϕϕθϕθϕϕ
Equation (5.3-2) is derived from equation (5.3-1).
∆∆∆∆−∆∆∆+∆∆−∆∆∆−∆∆+
=
∆+∆+∆+
'coscos/)'sinsin(sin
'cos/)'cossincossin'sincoscossin(cos
'cos/)'cossinsinsin'sincossincos(cos
)'''sin(
'sin)'''cos(
'cos)'''cos(
θϕθϕϕθϕθϕϕθ
θϕθϕθ
…. Equation (5.3-2)

24/72
Using equation (5.3-2), an exact solution of θ ’ and an approximate solution of ϕ’ are
obtained.
Further approximation can be made as follows.
Assuming the errors are very small, equations (5.3-1) and (5.3-2) are simplified as follows.
∆+∆+∆−∆+∆+∆+∆+∆−∆+
=
)'''sin(
'cos)'''sin('cos''sin)'''cos(
'sin)'''sin('sin''cos)'''cos(
sin
sincos
coscos
θϕθϕϕθϕθϕϕθ
θϕθϕθ
…. Equation (5.3-3)
∆+∆−∆−∆+
=
∆+∆+∆+
θϕθϕϕθϕθϕϕθ
θϕθϕθ
sin
cossincos'sincos
sinsinsin'coscos
)'''sin(
'sin)'''cos(
'cos)'''cos(
…. Equation (5.3-4)
5.3.4 Apparent Telescope Coordinate without Approximation
In order to obtain an exact solution of apparent telescope coordinate ϕ’, iteration will be
made as follows.
Rewriting equation (5.3-1), we get the following equation.
∆∆∆∆−∆∆∆∆∆−+∆∆−∆∆∆∆∆−−∆∆+
=
∆∆∆∆−∆∆∆∆++∆∆−∆∆∆∆+−∆∆+
=
∆+∆+∆+
'coscos/)'sinsin(sin
'cos/)cos/sin'cos)'sinsin(sin'sincos'cossin(cos
'cos/)cos/sin'sin)'sinsin(sin'sincos'sincos(cos
'coscos/)'sinsin(sin
'cos/)'cossin'cos)'''sin('sincos'cossin(cos
'cos/)'cossin'sin)'''sin('sincos'sincos(cos
)'''sin(
'sin)'''cos(
'cos)'''cos(
θϕθϕϕθϕθϕϕθ
θϕθϕϕθϕθϕϕθ
θϕθϕθ
…. Equation (5.3-5)
Using equation (5.3-2), the first approximate solution (ϕ’1, θ ’) is obtained. The first
approximate solution is input into equation (5.3-5),

25/72
∆∆∆∆−∆∆∆∆∆−+∆∆−∆∆∆∆∆−−∆∆+
=
∆+∆+∆+
'coscos/)'sinsin(sin
'cos/)cos/sin'cos)'sinsin(sin'sincos'cossin(cos
'cos/)cos/sin'sin)'sinsin(sin'sincos'sincos(cos
)'''sin(
'sin)'''cos(
'cos)'''cos(
11
11
2
2
θϕθϕϕθϕθϕϕθ
θϕθϕθ
…. Equation (5.3-6)
Solving this equation, the second approximate solution (ϕ’2, θ ’) is obtained.
This iteration will be performed until the solution converges. If the mount fabrication errors
are about 1 degree, two iterations are enough.

26/72
Figure 5.3-3 True Telescope Coordinates
Figure 5.3-4 Apparent Telescope Coordinate
ϕ’
θ’ + ∆’’
«
R’’’ R’’
R, R’
XY
Z, T
S
S’, S’’
T’’, T’’’T’ ∆’
∆
ϕ’
θ’ + ∆’’
«
R’’’ R’’
R, R’
XY
Z, T
S
S’, S’’
T’’, T’’’T’ ∆’
∆
ϕ
θ
«
XY
Z
ϕ
θ
«
XY
Z

27/72
Figure 5.3-5 Apparent Telescope Coordinates with Mount Error
∆
∆’
θ’’ + ∆”
T’’’, T’’
R’’
S’’, S’
R’
T’T’
S’
S
T, Z
R, R’
Telescope Vertical Axis
Telescope Horizontal Axis
Telescope Optical Axis
∆
∆’
θ’’ + ∆”
T’’’, T’’
R’’
S’’, S’
R’
T’T’
S’
S
T, Z
R, R’
∆
∆’
θ’’ + ∆”
∆
∆’
θ’’ + ∆”
T’’’, T’’
R’’
S’’, S’
R’
T’T’
S’
S
T, Z
R, R’
Telescope Vertical Axis
Telescope Horizontal Axis
Telescope Optical Axis

28/72
5.3.5 Example Calculations
5.3.5.1 Apparent Telescope Coordinates à True Telescope Coordinates
Find true telescope coordinates from apparent telescope coordinates.
(1) Data
Mount errors are given as shown below.
∆ = 0.15o = 0.15 / 180 x π = 0.0026179939 (radian)
∆’ = -0.08o = -0.08 / 180 x π = -0.0013962634 (radian)
∆’’ = 0.2o = 0.2 / 180 x π = 0.0034906585 (radian)
Measured position (apparent telescope coordinates) of a celestial object, (θ’, ϕ’) is,
θ’ = 62.3000o = 62.3 / 180 x π = 1.08734012 (radian)
ϕ’ = 53.5000o = 53.5 / 180 x π = 0.93375115 (radian)
(2) Calculation
θ’ + ∆’’ = 1.08734012 + 0.0034906585 = 1.09083078 (radian)
Exact solution is obtained from equation (5.3-1),
=
−+−
−−−+
−
−+−−
−
=
88700327.0
36896762.0
27764743.0
)0013962634.0sin(0026197739.0sin
)0013962634.0cos(0026179939.0cos09083078.1sin
)0013962634.0cos(0026179939.0sin93375115.0cos09083078.1sin
93375115.0cos0026179939.0cos)0013962634.0sin(
)0013962634.0cos(93375115.0sin09083078.1cos
)0013962634.0cos(0026179939.0sin93375115.0sin09083078.1sin
93375115.0sin0026179939.0cos)0013962634.0sin(
)0013962634.0cos(93375115.0cos09083078.1cos
sin
sincos
coscos
θϕθϕθ
From equations (4-13) and (4-14),

29/72
32890702.127764743.036896762.0
tan ===LM
ϕ
ϕ = 0.92569835 (radian) = 53.0386o
sin θ = 0.88700327
θ = 1.09081440 (radian) = 62.4991o
Approximate solution is obtained from equation (5.3-4) as follows.
=
−−+
+−−
=
88701083.0
36896797.0
27764770.0
09083078.1sin
93375115.0cos09083078.1sin0026179939.0
93375115.0cos)0013962634.0(93375115.0sin09083078.1cos
93375115.0sin09083078.1sin0026179939.0
93375115.0sin)0013962634.0(93375115.0cos09083078.1cos
sin
sincos
coscos
θϕθϕθ
From equations (4-13) and (4-14),
32890699.127764770.036896797.0
tan ===LM
ϕ
ϕ = 0.92569834 (radian) = 53.0386o
sin θ = 0.88701083
θ = 1.09083078 (radian) = 62.5000o

30/72
5.3.5.2 True Telescope Coordinates à Apparent Telescope Coordinates
Find apparent telescope coordinates from true telescope coordinates
(1) Data
Mount errors are the same as 5.3.4.2.
∆ = 0.15o = 0.15 / 180 x π = 0.0026179939 (radian)
∆’ = -0.08o = -0.08 / 180 x π = -0.0013962634 (radian)
∆’’ = 0.2o = 0.2 / 180 x π = 0.0034906585 (radian)
True telescope coordinates of a celestial object, (θ, ϕ) is,
ϕ = 0.92569835 (radian) = 53.0386o
θ = 1.09081440 (radian) = 62.4991o
(2) Calculation
From equation (5.3-2),
=
−−−
−−+−−
−−−−+
=
∆+∆+∆+
88701083.0
37120378.0
27467653.0
)0013962634.0cos(0026179939.0cos/
))0013962634.0sin(0026179939.0sin09081440.1(sin
)0013962634.0cos(/))0013962634.0cos(0026179939.0sin92569835.0cos09081440.1sin
)0013962634.0sin(0026179939.0cos92569835.0cos92569835.0sin09081440.1(cos
)0013962634.0cos(/))0013962634.0cos(0026179939.0sin92569835.0sin09081440.1sin
)0013962634.0sin(0026179939.0cos92569835.0sin92569835.0cos09081440.1(cos
)'''sin(
'sin)'''cos(
'cos)'''cos(
θϕθϕθ
From equations (4-13) and (4-14),
35142154.127467653.037120378.0
''
'tan ===LM
ϕ
ϕ ' = 0.93375083 (radian) = 53.5000o
sin (θ‘ + ∆'') = 0.88701083

31/72
θ' + ∆'' = 1.09083078 (radian) = 62.5000o
θ' = 62.5000o – 0.2o = 62.3000o
Approximate solution is obtained from equation (5.3-5).
=
+−−
−−+
=
∆+∆+∆+
88700327.0
37120343.0
27467625.0
09081440.1sin
92569835.0cos09081440.1sin)0026179939.0(
92569835.0cos)0013962634.0(92569835.0sin09081440.1cos
92569835.0sin09081440.1sin)0026179939.0(
92569835.0sin)0013962634.0(92569835.0cos09081440.1cos
)'''sin(
'sin)'''cos(
'cos)'''cos(
θϕθϕθ
From equations (4-13) and (4-14),
35142165.127467625.037120343.0
''
'tan ===LM
ϕ
ϕ ' = 0.93375087 (radian) = 53.5000o
sin (θ‘ + ∆ '') = 0.88700327
θ' + ∆'' = 1.09081440 (radian) = 62.4991o
θ' = 62.5000o – 0.2o = 62.2991o

32/72
5.4 Equations for Pointing Telescope
5.4.1 Introduction
Using setting circles in telescope mount, you can point a telescope to a target object whose
equatorial coordinates is known. You don’t need align the telescope mount. You just have to
point your telescope to two reference stars and measure the setting circle readings of the
stars. Input the data to your computer, and the computer will create transformation
equations. After that, you just input equatorial coordinates of a target into the computer and
the computer will return the setting circle numbers for the target (ref. [6]).
The telescope coordinate system is defined as shown in figure 5.4-1. The position of a star
will be specified in horizontal angle, ϕ and elevation, θ. Note that the horizontal angle is
measured from right to left. This is the opposite direction to azimuth. The telescope is not
necessarily leveled or aligned with any directions. Equatorial mounts and altazimuth mounts
are the special cases. For equatorial mounts, ϕ corresponds to right ascension, α and θ
corresponds to declination, δ. For altazimuth mounts, ϕ corresponds to –(azimuth angle)
and θ corresponds to altitude.
Figure 5.4-1 Telescope Coordinates and Equatorial Coordinates
XY
Z«
ϕ: Horizontal Angle
θ: Elevation Angle
Xe (Vernal Equinox)
at t0
Ze (Celestial North Pole)
Ye at t0
XY
Z«
ϕ: Horizontal Angle
θ: Elevation Angle
Xe (Vernal Equinox)
at t0
Ze (Celestial North Pole)
Ye at t0

33/72
5.4.2 Transformation Matrix
The relationship between telescope coordinates and equatorial coordinates is derived in this
section.
Transformation from equatorial coordinates to telescope coordinates is expressed in matrix
form as follows.
[ ]
=
=
N
M
L
T
N
M
L
TTT
TTT
TTT
n
m
l
332331
232221
131211
.... Equation (5.4-1)
Transformation from telescope coordinates to equatorial coordinates is expressed as follows.
This is the inverse form of equation (5.4-1).
[ ]
=
−
n
m
l
T
N
M
L1 .... Equation (5.4-2)
Where,
=
θϕθϕθ
sin
sincos
coscos
n
m
l
.... Equation (5.4-3)
: Direction cosine of an object in telescope coordinate system
−−−−
=
δαδαδ
sin
)(sin(cos
)(cos(cos
0
0
ttk
ttk
N
M
L
…. Equation (5.4-4)
: Direction cosine of an object in equatorial coordinate system
[ ]T , [ ] 1−T : Transformation matrix and its inverse matrix
t : Time
t0 : Initial time
ϕ : Horizontal angle of an object
θ : Elevation angle of an object

34/72
α : Right Ascension of an object
δ : Declination of an object
k = 1.002737908
5.4.3 Derivation of Transformation Matrix
Suppose that data set of equatorial coordinates and telescope coordinates for three
reference stars are obtained as follows.
Equatorial Coordinates Telescope Coordinates Reference
Star
Observation
Time Right
Ascension Declination
Horizontal
Angle
Elevation
Angle
Star 1 t1 α1 δ1 ϕ1 θ1
Star 2 t2 α2 δ2 ϕ2 θ2
Star 3 t3 α3 δ3 ϕ3 θ3
Using the data above, direction cosine of each star is expressed in both telescope
coordinates and equatorial coordinates.
=
1
11
11
1
1
1
sin
sincos
coscos
θϕθϕθ
n
m
l
.... Equation (5.4-5)
−−−−
=
1
0111
0111
1
1
1
sin
))(sin(cos
))(cos(cos
δαδαδ
ttk
ttk
N
M
L
…. Equation (5.4-6)
=
2
22
22
2
2
2
sin
sincos
coscos
θϕθϕθ
n
m
l
…. Equation (5.4-7)
−−−−
=
2
0222
0222
2
2
2
sin
))(sin(cos
))(cos(cos
δαδαδ
ttk
ttk
N
M
L
…. Equation (5.4-8)

35/72
=
3
33
33
3
3
3
sin
sincos
coscos
θϕθϕθ
n
m
l
…. Equation (5.4-9)
−−−−
=
3
0333
0333
3
3
3
sin
))(sin(cos
))(cos(cos
δαδαδ
ttk
ttk
N
M
L
…. Equation (5.4-10)
Relationship between telescope coordinates and equatorial coordinates are,
[ ]
=
1
1
1
1
1
1
N
M
L
T
n
m
l
[ ]
=
2
2
2
2
2
2
N
M
L
T
n
m
l
[ ]
=
3
3
3
3
3
3
N
M
L
T
n
m
l
Combining the three equations above, we obtain the following equation.
[ ]
=
321
321
321
321
321
321
NNN
MMM
LLL
T
nnn
mmm
lll
Multiplying
1
321
321
321
−
NNN
MMM
LLL
to the both side of the equation above, the transformation
matrix is derived as follows.
[ ]
1
321
321
321
321
321
321
−
=
NNN
MMM
LLL
nnn
mmm
lll
T …. Equation (5.4-11)

36/72
Although we use three reference stars in equation (5.4-11), two stars are enough. An
independent vector (direction cosine) is created from reference star 1 and star 2 using
vector product. The new direction cosines will replace direction cosines for reference star 3.
The definition of vector product is shown in figure 5.4-2 and equation (5.4-12).
−−−
=×=
2121
2121
2121
213
lmml
nlln
mnnm
OPOPOP …. Equation (5.4-12)
Where,
=
1
1
1
1
n
m
l
OP ,
=
2
2
2
2
n
m
l
OP
Figure 5.4-2 Vector Product
New direction cosines are created from the coordinates of the reference star 1 and the
reference star 2 using equation (5.4.12). Note that the vector products are divided by the
length of the vector because direction cosines should be unit length.
−−−
×−+−+−
=
2121
2121
2121
22121
22121
22121
3
3
3
)()()(
1
lmml
nlln
mnnm
lmmlnllnmnnmn
m
l
…. Equation (5.4-13)
O P1
P2
P3
O P1
P2
P3

37/72
−−−
×−+−+−
=
2121
2121
2121
22121
22121
22121
3
3
3
)()()(
1
LMML
NLLN
MNNM
LMMLNLLNMNNMN
M
L
…. Equation (5.4-14)
Use equations (5.4-13) and (5.4-14) in equation (5.4-11) instead of (5.4-9) and (5.4-10).
5.4.4 Example Calculation
The following data was measured using my 12.5 inch Dobsonian with setting circles.
Calculate the transformation matrix from telescope coordinates and equatorial coordinates
assuming the mount does not have fabrication errors.
Equatorial Coordinates Telescope Coordinates Reference
Star
Observation
Time Right
Ascension Declination
Horizontal
Angle
Elevation
Angle
Initial Time
t0
= 21h00m00s
= 5.497787
-- -- -- --
Star 1:
α And
t1
= 21h27m56s
= 5.619669
α1
= 0h07m54s
= 0.034470
δ1
= 29.038o
= 0.506809
ϕ1
= 99.25o
= 1.732239
θ1 =
= 83.87o
= 1.463808
Star 2:
α Umi
t2
= 21h37m02s
= 5.659376
α2
= 2h21m45s
= 0.618501
δ2
= 89.222o
= 1.557218
ϕ2
= 310.98o
= 5.427625
θ2
= 35.04o
= 0.611563
From equation (5.4-5),
−=
=
994282.0
105396.0
0171648.0
463808.1sin
732239.1sin463808.1cos
732239.1cos463808.1cos
1
1
1
n
m
l
From equation (5.4-6),

38/72
−=
−−−−
=
485390.0
0766175.0
870934.0
506809.0sin
))497787.5619669.5(81.00273790034470.0sin(506809.0cos
))497787.5619669.5(81.00273790034470.0cos(506809.0cos
1
1
1
N
M
L
From equation (5.4-7),
−=
=
574148.0
618107.0
536934.0
611563.0sin
427625.5sin611563.0cos
427625.5cos611563.0cos
2
2
2
n
m
l
From equation (5.4-8),
=
−−−−
=
999908.0
00598490.0
0121877.0
557218.1sin
))497787.5659376.5(002737908.1618501.0sin(557218.1cos
))497787.5659376.5(002737908.1618501.0cos(557218.1cos
2
2
2
N
M
L
From equation (5.4-13),

39/72
−=
×−−×−×−−×
−×−××
×−−−+
×−−×+
−×−×=
0529714.0
626379.0
777717.0
)536934.0(105396.0)618107.0()0171648.0(
574148.0)0171648.0(536934.0994282.0
)618107.0(994282.0574148.0105396.0
)536934.0105396.0)618107.0)(0171648.0((
)574148.0)0171648.0(536934.0994282.0(
))618107.0(994282.0574148.0105396.0(
1
2
2
2
3
3
3
n
m
l
From equation (5.4-14),
−
−=
×−−××−××−×−
×
×−−×+
×−×+
×−×−=
00707598.0
995776.0
0915436.0
0121877.0)0766175.0(00598490.0870934.0
999908.0870934.00121877.0485390.0
00598490.0485390.0999908.0)0766175.0(
)0121877.0)0766175.0(00598490.0870934.0(
)999908.0870934.00121877.0485390.0(
)00598490.0485390.0999908.0)0766175.0((
1
2
2
2
3
3
3
N
M
L
The inverse matrix is,

40/72
−−−
−−=
−−
−=
−
00707598.0995776.00915436.0
006518.10582508.0555830.0
0133413.0105481.0146349.1
00707598.0999908.0485390.0
995776.000598490.00766175.0
0915436.00121877.0870934.01
321
321
321
NNN
MMM
LLL
From equation (5.4-11), we obtain the following transform matrix.
[ ]
−−−
−−=
−−−
−−
−−
−=
=
−
56425.0018686.082552.0
61911.067086.040704.0
54617.074134.038932.0
00707598.0995776.00915436.0
006518.10592508.0555830.0
0133413.0105481.0146349.1
0529714.0574148.0994282.0
626379.0618107.0105396.0
777717.0536934.00171648.0
1
321
321
321
321
321
321
NNN
MMM
LLL
nnn
mmm
lll
T
If you want to aim the telescope at β Cet (α = 0h43m07s, δ = -18.038o) at 21h52m12s, from
equation (5.4-1),
radiansmh 188132.007430 ==α
radian314822.0038.18 −=−= oδ
radiansmht 725553.5125221 ==
From equation (5.4-1),

41/72
−−=
−−×−×−−×−×−
=
−−−−
=
309647.0
0382687.0
950081.0
)314822.0sin(
))497787.5725553.5(002737908.1188132.0sin()314822.0cos(
))497787.5725553.5(002737908.1188132.0cos()314822.0cos(
sin
)(sin(cos
)(cos(cos
0
0
δαδαδ
ttk
ttk
N
M
L
From equation (5.4-1),
[ ]
−=
−−
−−−
−−=
=
610308.0
604099.0
510635.0
309647.0
0382687.0
950081.0
56425.0018686.082552.0
61911.067086.040704.0
54617.074134.038932.0
N
M
L
T
n
m
l
From equations (4-13) and (4-14), telescope coordinates are calculated as follows.
183035.1510635.0
604099.0tan −=
−=ϕ
o21.130272546.2 == radianϕ
610308.0sin =θ o61.37656449.0 == radianθ
This calculated telescope coordinates is very close to the measured telescope coordinates,
ϕ = 130.46o, θ = 37.67o.

42/72
5.5 Polar Axis Misalignment Determination
The matrix method is applied to derive the equations of the declination drift method for polar
axis misalignment determination in this section.
The declination drift method was proposed by Challis [5] to determine the polar axis
misalignment of equatorial mount. The advantage of the declination drift method is its
simplicity of the measurement.
5.5.1 Derivation of Equations
5.5.1.1 Relationship between Coordinate Systems
Following Coordinate systems are used. See figure 5.5-1.
Equatorial coordinate system is Xe’-Ye’-Ze’. Ze’-axis directs to the north pole. Ye’-axis is in the
horizontal plane and directs to the east. Xe’-axis is on the meridian. Polar coordinates of a
celestial object in the equatorial coordinate system is (-H, δ), where H is hour angle and δ is
declination.
Telescope coordinate system is X-Y-Z and its polar coordinates is (ξ, ζ).
Misalignment of the telescope polar axis Z from the celestial polar axis Ze’ is defined as
follows.
First, equatorial coordinate system Xe’-Ye’-Ze’ is rotated θ clockwise around Ze’-axis (polar
axis), then the new coordinate system is rotated γ clockwise around the new X-axis.

43/72
Figure 5.5-1 Misalignment of Telescope Polar Axis
Direction cosine of a star in equatorial coordinates is,
−−
=
δδδ
sin
)sin(cos
)cos(cos
'
'
'
H
H
N
M
L
e
e
e
… Equation (5.5.1-1)
Direction cosine of the same star in telescope coordinates is,
=
ςξςξς
sin
sincos
coscos
N
M
L
… Equation (5.5.1-2)
Relationship between the coordinate systems is derived as follows using equations shown
in section 4.2.
Yh , Ye’ (East)
Xh (South)
Zh (Zenith)
O
Ze’ (North Pole)
Xe’ (Meridian)
EquatorHorizon
Meridian
Z (Polar Axis of Telescope)
Y
θ (rotate clockwise around Ze’-axis)
X
uv
Yh , Ye’ (East)
Xh (South)
Zh (Zenith)
O
Ze’ (North Pole)
Xe’ (Meridian)
EquatorHorizon
Meridian
Z (Polar Axis of Telescope)
Y
θ (rotate clockwise around Ze’-axis)
X
uv

44/72
−
−=
−
−=
'
'
'
coscossinsinsin
sincoscossincos
0sincos
'
'
'
100
0cossin
0sincos
cossin0
sincos0
001
e
e
e
e
e
e
N
M
L
N
M
L
N
M
L
γθγθγγθγθγ
θθ
θθθθ
γγγγ
… Equation (5.5.1-3)
−−
−
−=
δδδ
γθγθγγθγθγ
θθ
ςξςξς
sin
)sin(cos
)cos(cos
coscossinsinsin
sincoscossincos
0sincos
sin
sincos
coscos
H
H
… Equation (5.5.1-4)
5.5.1.2 Basic Equations for Declination Drift Method
Two stars are selected for measurement. Point the telescope to the first star and drive the
equatorial mount around polar axis only. Measure the drift of the star in declination in a
certain time interval. Same measurement is done for the second star.
Assume that declination drifts of two stars are obtained from observation as shown in table
5.5.1-1. Atmospheric refraction is neglected in this section. Effect of atmospheric refraction
will be discussed in section 5.5.1.4.
Table 5.5.1-1 Observed Data
Position of Star Time
Star Right
Ascension, α
Declination,
δ Start End
Drift of Declination
(Refraction is
neglected.)
Star 1 α1 δ1 t1a t1b ζ1b - ζ1a
Star 2 α2 δ2 t2a t2b ζ2b - ζ2a
From equation (5.5.1-4),
δγδθγδθγς sincos)sin(coscossin)cos(cossinsinsin +−+−= HH
… Equation (5.5.1-5)

45/72
Using the data from star 1 in table 5.5.1-1,
111111 sincos)sin(coscossin)cos(cossinsinsin δγδθγδθγς +−+−= aaa HH
… Equation (5.5.1-6)
Where,
H1a: Hour angle of the first star at time t1a
H1b: Hour angle of the first star at time t1b
ζ1a: Declination in Telescope Coordinates at time t1a
δ1: Declination of the first star in Equatorial Coordinates
Assuming that γ is very small, equation (5.5.1-6) is expressed as,
))sin(cos)cos((sincossin
sin)sin(coscos)cos(cossinsin
1111
111111
aa
aaa
HH
HH
−+−+=+−+−≅
θθδγδδδθγδθγς
… Equation (5.5.1-7)
Considering the following relationship (assuming that ∆ is very small),
11111 cossinsincoscossin)sin( δδδδδ ∆+≅∆+∆=∆+
We get the following equation from equation (5.5.1-7).
)sin(cos)cos(sin
))sin(cos)cos((sin
111
1111
aa
aaa
HH
HH
−+−+=−+−+≅
θγθγδθθγδς
… Equation (5.5.1-8)
Same equation is derived for time t1b.
)sin(cos)cos(sin 1111 bbb HH −+−+≅ θγθγδς … Equation (5.5.1-9)
Retracting equation (5.5.1-8) from (5.5.1-9),
))sin()(sin(cos))cos()(cos(sin 111111 ababab HHHH −−−+−−−=− θγθγςς
… Equation (5.5.1-10)
Putting θγ sin=u , θγ cos=v in equation (5.5.1-10),
))sin()(sin())cos()(cos( 111111 ababab HHvHHu −−−+−−−=− ςς
… Equation (5.5.1-11)
Using the data of star 2 in table 5.5.1-1,
))sin()(sin())cos()(cos( 222222 ababab HHvHHu −−−+−−−=− ςς
… Equation (5.5.1-12)
Equations (5.5.1-11) and (5.5.1-12) are the basic equations of declination drift method.

46/72
When you obtain the data in table 5.5.1-1 from observation, you can calculate the polar axis
misalignment u and v from equations (5.5.1-11) and (5.5.1-12).
Two important comments can be made based on the equations.
(1) In order to maximize the accuracy of the method, it is desirable to take two stars which
locations at observation are nearly 90 degree apart.
(2) It is not necessary to select stars near equator. Stars far from celestial equator can work.
This conclusion is derived from the fact that the declinations of the stars do not appear in
equations (5.5.1-11) and (5.5.1-12).
5.5.1.3 Challis’ Method
Challis’ original declination drift method requires three measurements with one star. See
table 5.5.1-2 for the required data.
Table 5.5.1-2 Observed Data – Challis’ Method
Position of Star Time
Star Right
Ascension, α
Declination,
δ Start End
Drift of Declination
(Refraction is
neglected.)
ta tb ζb - ζa Star 1 α1 δ1
ta tc ζc - ζa
Based on equations (5.5.1-11) and (5.5.1-12),
))sin()(sin())cos()(cos( ababab HHvHHu −−−+−−−=− ςς
… Equation (5.5.1-13)
))sin()(sin())cos()(cos( acacac HHvHHu −−−+−−−=− ςς
… Equation (5.5.1-14)

47/72
5.5.1.4 Compensation of Atmospheric Refraction
Effect of atmospheric refraction is included in the measured data.
Table 5.5.1-3 Observed Data
Position of Star Time
Star Right
Ascension, α
Declination,
δ Start End
Drift of Declination
(Refraction is
included.)
Star 1 α1 δ1 t1a t1b ζ1b’ - ζ1a’
Star 2 α2 δ2 t2a t2b ζ2b’ - ζ2a’
Altitude of the star at observed instant is necessary to calculate the atmospheric refraction.
Relationship between equatorial coordinates and altazimuth coordinates is (see section
5.1.1),
−=
'
'
'
sin0cos
010
cos0sin
e
e
e
h
h
h
N
M
L
N
M
L
φφ
φφ … Equation (5.5.1-15)
Where,
φ is observer’s latitude.
−−
=
h
Ah
Ah
N
M
L
h
h
h
sin
)sin(cos
)cos(cos
… Equation (5.5.1-16)
A is azimuth measured westward from the South and h is “airless” altitude.
δφδφ sincos)cos(cossin)cos(cos −−=−= HAhLh
)sin(cos)sin(cos HAhM h −=−= δ
δφδφ sinsin)cos(coscossin +−== HhN h
h
h
L
MA =− )tan( … Equation (5.5.1-17)
From equation (15.2) in ref. [2] (page 101), atmospheric refraction R is expressed as follows.
R is added to “airless” altitude h to obtain apparent altitude. Note that equation (5.5.1-18) is
valid for the altitude larger than 15 degree.

48/72
−
×−
−
×= hhR
2tan
/18036000824.0
2tan
/1803600276.58 3 π
ππ
π (in radian)
… Equation (5.5.1-18)
Using the following relationship,
h
h
N
N
hh
hh
h22 1
sinsin1
sincos
2tan
−=
−==
−π
… Equation (5.5.1-19)
Equation (5.5.1-18) is expressed as follows.
322 1
/18036000824.01
/1803600276.58
−
×−
−
×=
h
h
h
h
N
N
N
NR
ππ
… Equation (5.5.1-20)
Apparent altitude h0 is expressed as follows.
Rhh +=0 … Equation (5.5.1-21)
Refracted position of the star in altazimuth coordinates
'
'
'
h
h
h
N
M
L
is,
−+
=
+−−−−
≈
+−−−−−−
=
+−+−+
=
h
Ah
Ah
R
N
M
L
hRN
AhRM
AhRL
RhRh
ARhARh
ARhARh
Rh
ARh
ARh
N
M
L
h
h
h
h
h
h
h
h
h
cos
sinsin
cossin
cos
)sin(sin
)cos(sin
sincoscossin
)sin(sinsin)sin(coscos
)cos(sinsin)cos(coscos
)sin(
)sin()cos(
)cos()cos(
'
'
'
… Equation (5.5.1-22)
Then, refracted position of the star in equatorial coordinates
''
''
''
e
e
e
N
M
L
is,

49/72
+
+−+
=
−
−+
−=
−+
−=
−=
hAh
Ah
hAh
R
N
M
L
h
Ah
Ah
R
N
M
L
h
Ah
Ah
R
N
M
L
N
M
L
N
M
L
e
e
e
h
h
h
h
h
h
h
h
h
e
e
e
cossincossincos
sinsin
coscoscossinsin
'
'
'
cos
sinsin
cossin
sin0cos
010
cos0sin
sin0cos
010
cos0sin
cos
sinsin
cossin
sin0cos
010
cos0sin
'
'
'
sin0cos
010
cos0sin
''
''
''
φφ
φφ
φφ
φφ
φφ
φφ
φφ
φφ
φφ
φφ
… Equation (5.5.1-23)
Refracted position of the star in telescope coordinates
'
'
'
N
M
L
is derived from equations
(5.5.1-3) and (5.5.1-23).
+
+−+
−
−=
hAh
Ah
hAh
R
N
M
L
N
M
L
e
e
e
cossincossincos
sinsin
coscoscossinsin
'
'
'
coscossinsinsin
sincoscossincos
0sincos
'
'
'
φφ
φφ
γθγθγγθγθγ
θθ
… Equation (5.5.1-24)
Putting observed data of star 1 at t1b in table 5.5.1-3 to equation (5.5.1-23),
( )( )
( )bbbbb
bbbb
bbbbbbb
hRAhR
AhRH
hRAhRH
111111
11111
11111111
cossincossincossincos
sinsin)sin(coscossin
coscoscossinsin)cos(cossinsin'sin
φφδγδθγ
φφδθγς
++++−+
+−−=
Considering γ and R1b are very small,

50/72
11
1111111
11111
111111
coscos
cossincossincos)sin(cos)cos(sinsin
cossincossincos
sin)sin(coscos)cos(cossin'sin
δδ
φφθγθγδ
φφ
δδθγδθγς
++−+−+=
++
+−+−≅
bbbbbb
bbbbb
bbb
hAhRHH
hRAhR
HH
Considering the following relationship (assuming that ∆ is very small),
11111 cossinsincoscossin)sin( δδδδδ ∆+≅∆+∆=∆+
1
11111111 cos
cossincossincos)sin(cos)cos(sin'
δφφ
θγθγδς bbbbbbb
hAhRHH
++−+−+=
… Equation (5.5.1-25)
Same equation is derived for data of star 1 at t1a in table 5.5.1-3.
1
11111111 cos
cossincossincos)sin(cos)cos(sin'
δφφ
θγθγδς aaaaaaa
hAhRHH
++−+−+=
… Equation (5.5.1-26)
Retracting equation (5.5.1-25) from (5.5.1-26),
CBAab ++=− θγθγςς cossin'' 11 … Equation (5.5.1-27)
Where,
)cos()cos( 11 ab HHA −−−=
)sin()sin( 11 ab HHB −−−=
1
1111
1
1111
1
1111
1
1111
cos
cossintancos
cos
cossintancos
cos
cossincossincos
cos
cossincossincos
δφφ
δφφ
δφφ
δφφ
aaaha
bbbhb
aaaa
bbbb
hhLR
hhLR
hAhR
hAhRC
+−
+=
+−
+=
Same equation is derived for data of star 2.
FEDab ++=− θγθγςς cossin'' 22 … Equation (5.5.1-28)
Where,
)cos()cos( 22 ab HHD −−−=
)sin()sin( 22 ab HHE −−−=

51/72
2
2222
2
2222
2
2222
2
2222
coscossintancos
coscossintancos
coscossincossincos
coscossincossincos
δφφ
δφφ
δφφ
δφφ
aaaha
bbbhb
aaaa
bbbb
hhLR
hhLR
hAhR
hAhRF
+−
+=
+−
+=
Putting θγ sin=u , θγ cos=v in equations (5.5.1-23) and (5.5.1-24),
0)''( 11 =−−++ abCBvAu ςς … Equation (5.5.1-29)
0)''( 22 =−−++ abFEvDu ςς … Equation (5.5.1-30)
Equations (5.5.1-29), (5.5.1-30), (5.5.1-17) and (5.5.1-20) are the equations for declination
drift method with atmospheric refraction.

52/72
5.5.2 Example Calculations
5.5.2.1 Two Star Declination Drift Method with Atmospheric Refraction Neglected
(1) Observed Data
Observed data is shown in table 5.5.2-1.
Table 5.5.2-1 Observed Data
Position of Star Time
Star Right
Ascension,
α
Declination,
δ Start End
Drift of Declination
α Boo α1 =
14h15m49s
δ1 =
19o10’29”
t1a =
2001 May 24,
21h00m00s
t1b =
2001 May 24,
21h50m00s
ζ1b - ζ1a = -34.52”
α Boo α2 =
14h15m49s
δ2 =
19o10’29”
t2a =
2001 May 24,
21h50m00s
t2b =
2001 May 24,
22h23m00s
ζ2b - ζ2a = -65.88”
Observation Location: Latitude, φ = 52o09’20”.32N, Longitude, L = 0o0’38”.36E
All the data is converted to radian.
Table 5.5.2-2 Observed Data (in radian)
Position of Star Time
Star Right
Ascension,
α
Declination,
δ Start End
Drift of Declination
α Boo α1 =
3.73420466
δ1 =
0.33466204
t1a =
2001 May 24,
5.49778714
t1b =
2001 May 24,
5.71595330
ζ1b - ζ1a =
-0.00016736
α Boo α2 =
3.73420466
δ2 =
0.33466204
t2a =
2001 May 24,
5.71595330
t2b =
2001 May 24,
5.85994296
ζ2b - ζ2a =
-0.00031940
Observation Location: Latitude, φ = 0.91028772, Longitude, L = -0.00018597

53/72
(2) Sidereal Time
Julian Day number JD corresponding to 2001 May 24, 0h UT is 2452053.5 (chapter 7 in ref.
[2]).
The sidereal time at Greenwich at 2001 May 24, 0h UT is (chapter 11 of ref. [2]),
50139219712.036525
0.24515455.245205336525
0.2451545=
−=
−=
JDT
smh
TTTUThat
95.38061621780288.4deg662304.241deg662304.60138710000
000387933.0770053608.3600046061837.10003
20
====
−++=θ
(3) Hour Angle
From chapter 12 of ref. [2], hour angles are calculated as follows.
αθ −−= LH 0
99662377.5
73420466.3)00018597.0(49778714.550027379093.121780288.41
=−−−×+=aH
21538725.6
73420466.3)00018597.0(71595330.550027379093.121780288.41
=−−−×+=bH
21538725.6
73420466.3)00018597.0(71595330.550027379093.121780288.42
=−−−×+=aH
35977114.6
73420466.3)00018597.0(85994296.550027379093.121780288.42
=−−−×+=bH
(4) Basic Equations
From equation (5.5.1-11),
))99662377.5sin()21538725.6(sin(
))99662377.5cos()21538725.6(cos(00016736.0
−−−+−−−=−
v
u
vu 21490953.0038481147.000016736.0 −=− … Equation (5.5.2-1)
From equation (5.5.1-12),
))21538725.6sin()35977114.6(sin(
))21538725.6cos()35977114.6(cos(00031940.0
−−−+−−−=−
v
u

54/72
vu 14425712.070006338536.000031940.0 −−=− … Equation (5.5.2-2)
Solving equations (5.5.2-1) and (5.5.2-2),
u = 0.007916 radian = 0.454o = 1633”
v = 0.002179 radian = 0.125o = 449”

55/72
5.5.2.2 Challis’ Method with Atmospheric Refraction Neglected
(1) Observed Data
Observed data is shown in table 5.5.2-3.
Table 5.5.2-3 Observed Data
Position of Star Time
Star Right
Ascension,
α
Declination,
δ Start End
Drift of Declination
ta =
2001 May 24,
21h00m00s
tb =
2001 May 24,
21h50m00s
ζb - ζa = -34.52”
α Boo α1 =
14h15m49s
δ1 =
19o10’29” ta =
2001 May 24,
21h00m00s
tc =
2001 May 24,
22h50m00s
ζc - ζa = -100.40”
Observation Location: Latitude, φ = 52o09’20”.32N, Longitude, L = 0o0’38”.36E
All the data is converted to radian.
Table 5.5.2-4 Observed Data (in radian)
Position of Star Time
Star Right
Ascension,
α
Declination,
δ Start End
Drift of Declination
ta =
2001 May 24,
5.49778714
tb =
2001 May 24,
5.71595330
ζb - ζa =
-0.00016736
α Boo α1 =
3.73420466
δ1 =
0.33466204 ta =
2001 May 24,
5.49778714
tc =
2001 May 24,
5.85994296
ζc - ζa =
-0.00048675
Observation Location: Latitude, φ = 0.91028772, Longitude, L = -0.00018597
(2) Sidereal Time
Julian Day number JD corresponding to 2001 May 24, 0h UT is 2452053.5 (chapter 7 in ref.

56/72
[2]).
The sidereal time at Greenwich at 2001 May 24, 0h UT is (chapter 11 of ref. [2]),
50139219712.036525
0.24515455.245205336525
0.2451545=
−=
−=
JDT
smh
TTTUThat
95.38061621780288.4deg662304.241deg662304.60138710000
000387933.0770053608.3600046061837.10003
20
====
−++=θ
(3) Hour Angle
From chapter 12 of ref. [2], hour angles are calculated as follows.
αθ −−= LH 0
99662377.5
73420466.3)00018597.0(49778714.550027379093.121780288.4
=−−−×+=aH
21538725.6
73420466.3)00018597.0(71595330.550027379093.121780288.4
=−−−×+=bH
35977114.6
73420466.3)00018597.0(85994296.550027379093.121780288.4
=−−−×+=cH
(4) Basic Equations
From equation (5.5.1-13),
))99662377.5sin()21538725.6(sin(
))99662377.5cos()21538725.6(cos(00016736.0
−−−+−−−=−
v
u
vu 21490953.0038481147.000016736.0 −=− … Equation (5.5.2-3)
From equation (5.5.1-14),
))99662377.5sin()35977114.6(sin(
))99662377.5cos()35977114.6(cos(00031940.0
−−−+−−−=−
v
u
vu 3591666.0037847293.000048675.0 −=− … Equation (5.5.2-4)
Solving equations (5.5.2-3) and (5.5.2-4),
u = 0.008051 radian = 0.447o = 1661”
v = 0.002204 radian = 0.125o = 455”

57/72
5.5.2.3 Two Star Drift Method with Atmospheric Refraction Compensated
(1) Observed Data
Same data as section 5.5.2.1 is used.
Table 5.5.2-5 Observed Data
Position of Star Time
Star Right
Ascension,
α
Declination,
δ Start End
Drift of Declination
α Boo α1 =
14h15m49s
δ1 =
19o10’29”
t1a =
2001 May 24,
21h00m00s
t1b =
2001 May 24,
21h50m00s
ζ1b - ζ1a = -34.52”
α Boo α2 =
14h15m49s
δ2 =
19o10’29”
t2a =
2001 May 24,
21h50m00s
t2b =
2001 May 24,
22h23m00s
ζ2b - ζ2a = -65.88”
Observation Location: Latitude, φ = 52o09’20”.32N, Longitude, L = 0o0’38”.36E
All the data is converted to radian.
Table 5.5.2-6 Observed Data (in radian)
Position of Star Time
Star Right
Ascension,
α
Declination,
δ Start End
Drift of Declination
α Boo α1 =
3.73420466
δ1 =
0.33466204
t1a =
2001 May 24,
5.49778714
t1b =
2001 May 24,
5.71595330
ζ1b - ζ1a =
-0.00016736
α Boo α2 =
3.73420466
δ2 =
0.33466204
t2a =
2001 May 24,
5.71595330
t2b =
2001 May 24,
5.85994296
ζ2b - ζ2a =
-0.00031940
Observation Location: Latitude, φ = 0.91028772, Longitude, L = -0.00018597
(2) Sidereal Time

58/72
Julian Day number JD corresponding to 2001 May 24, 0h UT is 2452053.5 (chapter 7 in ref.
[2]).
The sidereal time at Greenwich at 2001 May 24, 0h UT is (chapter 11 of ref. [2]),
50139219712.036525
0.24515455.245205336525
0.2451545=
−=
−=
JDT
smh
TTTUThat
95.38061621780288.4deg662304.241deg662304.60138710000
000387933.0770053608.3600046061837.10003
20
====
−++=θ
(3) Hour Angle
From chapter 12 of ref. [2], hour angles are calculated as follows.
αθ −−= LH 0
99662377.5
73420466.3)00018597.0(49778714.550027379093.121780288.41
=−−−×+=aH
21538725.6
73420466.3)00018597.0(71595330.550027379093.121780288.41
=−−−×+=bH
21538725.6
73420466.3)00018597.0(71595330.550027379093.121780288.42
=−−−×+=aH
35977114.6
73420466.3)00018597.0(85994296.550027379093.121780288.42
=−−−×+=bH
(4) Basic Equations
Atmospheric refraction is calculated using equations (5.5.1-17) and (5.5.1-20).
51394425.0
)33466204.0sin()91028772.0cos(
)99662377.5cos(*)33466204.0cos()91028772.0sin(1
=−
−=ahL
54264618.0
)33466204.0sin()91028772.0cos(
)21538725.6cos(*)33466204.0cos()91028772.0sin(1
=−
−=bhL
54264618.0
)33466204.0sin()91028772.0cos(
)21538725.6cos(*)33466204.0cos()91028772.0sin(2
=−
−=ahL

59/72
54217341.0
)33466204.0sin()91028772.0cos(
)35977114.6cos(*)33466204.0cos()91028772.0sin(2
=−
−=bhL
81522146.0
3366204.0sin91028773.0sin)99662377.5cos(33466204.0cos91028772.0cos1
=+−=ahN
83752057.0
3366204.0sin91028773.0sin)21538725.6cos(33466204.0cos91028772.0cos1
=+−=bhN
83752057.0
3366204.0sin91028773.0sin)21538725.6cos(33466204.0cos91028772.0cos2
=+−=ahN
83715326.0
3366204.0sin91028773.0sin)35977114.6cos(33466204.0cos91028772.0cos2
=+−=bhN
95311148.081522146.0sinsin 11
11 === −−
aha Nh
99272961.083752057.0sinsin 11
11 === −−
bhb Nh
99272961.083752057.0sinsin 12
12 === −−
aha Nh
99205772.083715326.0sinsin 12
12 === −−
bhb Nh
"37.4100020057.0
81522146.081522146.01
/18036000824.0
81522146.081522146.01
/1803600276.58
322
1
==
−×
−−
×=
radian
R a ππ
"00.3800018421.0
83752057.083752057.01
/18036000824.0
83752057.083752057.01
/1803600276.58
322
1
==
−×
−−
×=
radian
R b ππ
"00.3800018421.0
83752057.083752057.01
/18036000824.0
83752057.083752057.01
/1803600276.58
322
2
==
−×
−−
×=
radian
R a ππ

60/72
"05.3800018448.0
83715326.083715326.01
/18036000824.0
83715326.083715326.01
/1803600276.58
322
2
==
−×
−−
×=
radian
R b ππ
From equation (5.5.1-27),
038481147.0)99662377.5cos()21538725.6cos()cos()cos( 11 =−−−=−−−= ab HHA
21490953.0)99662377.5sin()21538725.6sin()sin()sin( 11 −=−−−=−−−= ab HHB
00000769.000019137.000018368.0
33466204.0cos95311148.0cos91028772.0sin
95311148.0tan91028772.0cos51394425.0
00020057.0
33466204.0cos99272961.0cos91028772.0sin
99272961.0tan91028772.0cos54264618.0
00018421.0
coscossintancos
coscossintancos
1
1111
1
1111
−=−=
×+××
×−
×+××
×=
+−
+=
δφφ
δφφ aaah
abbbh
b
hhLR
hhLRC
70006338536.0
)21538725.6cos()35977114.6cos()cos()cos( 22
−=−−−=−−−= ab HHD
14425712.0
)21538725.6sin()35977114.6sin()sin()sin( 22
−=−−−=−−−= ab HHE

61/72
00000012.000018368.000018380.0
33466204.0cos99272961.0cos91028772.0sin
99272961.0tan91028772.0cos54264618.0
00018421.0
33466204.0cos99205772.0cos91028772.0sin
99205772.0tan91028772.0cos54217341.0
00018448.0
coscossintancos
coscossintancos
2
2222
2
2222
=−=
×+××
×−
×+××
×=
+−
+=
δφφ
δφφ aaah
abbbh
b
hhLR
hhLRF
From equations (5.5.1-29) and (5.5.1-30),
000016736.000000769.021490953.0038481147.0 =+−− vu
000031940.000000012.014425712.070006338536.0 =++−− vu
Solving the equations,
u = 0.008015 radian = 0.459o = 1653”
v = 0.002178 radian = 0.125o = 449”
Comparing these values with the result in section 5.5.2.1 (refraction neglected), effect of
atmospheric refraction is small in this example.

62/72
5.6 Dome Slit Synchronization
Computer control of telescope has become popular in amateur astronomy, and now the
advancement expands further. Dome slit control is an example of such advancement. In this
section, equations to perform dome slit control for a telescope on German equatorial mount
are derived. The equations are actually used by John Oliver of University of Florida to
develop his dome control software “DomeSync”.
The center of the telescope tube on German equatorial mount is offset from the center of a
dome as shown in figure 5.6-1. Because of this, the azimuth of the dome slit is not
coincident with the azimuth of the object which the telescope is aimed. The objective is to
develop equations of the azimuth of the dome slit. This problem is a very good example of
matrix method application.
Figure 5.6-1 shows definition of coordinate systems used in this section. Point O is the
center of the dome. Point P is the intersection of the polar axis and the declination axis of
the German equatorial mount. Point Q is the intersection of the telescope tube centerline
and the declination axis. Dimensions of the dome and the mount are also defined in the
figure.
Ydome (East)
Zdome(Zenith)
Object
Ze’ (North Pole)Xe’ (Meridian)
φ : Latitude
P
R
r
Dome
O
Ye’ (East)
Xdome (South)
Xdome0
Zdome0
Q
Azimuth
Figure 5.6-1 Definition of Coordinate Systems – Dome Slit Position

63/72
5.6.1 Object in First Quadrant
Equation when the object is in the first quadrant (180o < H < 270o) and telescope is in east
side of mount is derived in this section. Point S in figure 5.6.1-1 is on the dome surface.
Ydome(East)
Xdome (South)
Zdome(Zenith)
Object
Ze’ (North Pole)Xe’ (Meridian)
φ : Latitude
H Ye’ (East)
P
QR
r
δ
S
Dome
O
Telescope is in east side of mount.
180o < H < 270o
Figure 5.6.1-1 Object in First Quadrant
From equation (5.1-2), unit vector QS
QS is,
−−
=
=
δδδ
sin
)sin(cos
)cos(cos
'
'
'
H
H
N
M
L
QS
QS
e
e
e
Vector PàQ in Xe’-Ye’-Ze’ coordinate is,

64/72
−−
=
=
0
)cos(
)sin(
'
'
'
ππ
H
H
r
Z
Y
X
PQ
e
e
e
From equation (5.1-4), vector OàS in Xdome-Ydome-Zdome coordinate is,
+++
=
−+−
−−+−
−−
−+−
−+−
−+−
−+
=
+
−−
+
−−
−
−−
−
−
=
=
FkC
EkB
DkA
HkHrZ
HkHr
HkHrX
Z
X
H
H
kHr
Hr
Z
Y
X
OS
dome
dome
dome
dome
dome
dome
dome
δπ
φδπ
φππ
φ
δπ
δπ
φδπ
φππ
φ
δδδ
ππ
πφ
πφ
πφ
πφ
sin2
cos)cos(cos2
sin)sin(2
sin
)sin(cos)cos(
sin2
sin)cos(cos2
cos)sin(2
cos
0
sin
)sin(cos
)cos(cos
0
)cos(
)sin(
2cos0
2sin
0102
sin02
cos
0
0
0
0
… Equation (5.6.1-1)
Where,
k: Constant
δπ
φδπ
φ
δ
δπ
φδπ
φ
ππ
φ
π
ππ
φ
sin2
cos)cos(cos2
sin
)sin(cos
sin2
sin)cos(cos2
cos
)sin(2
sin
)cos(
)sin(2
cos
0
0
−+−
−−=
−=
−+−
−=
−
−−=
−=
−
−+=
HF
HE
HD
HrZC
HrB
HrXA
dome
dome
… Equation (5.6.1-2)

65/72
5.6.2 Object in Second Quadrant
Object is in the second (270o < H < 360o) and telescope is in west side of mount.
Ydome(East)
Xdome (South)
Zdome(Zenith)
Object
Ze’ (North Pole)Xe’ (Meridian)
φ : Latitude
H Ye’ (East)
P
Q
R
r
δS
Dome
O
Telescope is in west side of mount.
270o < H < 360o
Figure 5.6.2-1 Object in Second Quadrant
From equation (5.1-2), unit vector QS
QS is,
−−
=
=
δδδ
sin
)sin(cos
)cos(cos
'
'
'
H
H
N
M
L
QS
QS
e
e
e
Vector PàQ in Xe’-Ye’-Ze’ coordinate is,

66/72
−−
−
=
=
02
3sin
23
cos
'
'
'π
π
H
H
r
Z
Y
X
PQ
e
e
e
From equation (5.1-4), vector OàS in Xdome-Ydome-Zdome coordinate is,
+++
=
−+−
−−+
−
−−
−+
−−
−+−
−+
−
−+
=
+
−−
+
−−
−
−
−−
−
−
=
=
FkC
EkB
DkA
HkHrZ
HkHr
HkHrX
Z
X
H
H
kHr
Hr
Z
Y
X
OS
dome
dome
dome
dome
dome
dome
dome
δπ
φδπ
φππ
φ
δπ
δπ
φδπ
φππ
φ
δδδ
π
π
πφ
πφ
πφ
πφ
sin2
cos)cos(cos2
sin2
3cos
2sin
)sin(cos2
3sin
sin2
sin)cos(cos2
cos2
3cos
2cos
0
sin
)sin(cos
)cos(cos
02
3sin
23
cos
2cos0
2sin
0102
sin02
cos
0
0
0
0
… Equation (5.6.2-1)
Where,
k: Constant

67/72
δπ
φδπ
φ
δ
δπ
φδπ
φ
ππφ
π
ππφ
sin2
cos)cos(cos2
sin
)sin(cos
sin2
sin)cos(cos2
cos
23
cos2
sin
23
sin
23
cos2
cos
0
0
−+−
−−=
−=
−+−
−=
−
−−=
−−=
−
−+=
HF
HE
HD
HrZC
HrB
HrXA
dome
dome
… Equation (5.6.2-2)
5.6.3 Object in Third Quadrant
Object is in the third quadrant (0o < H < 90o) and telescope is in east side of mount.
Ydome(East)
Xdome (South)
Zdome(Zenith)
Object
Ze’ (North Pole)Xe’ (Meridian)
φ : Latitude
H
Ye’ (East)
PQ
R
r
δ
SDome
O
Telescope is in east side of mount.
0o < H < 90o
Figure 5.6.3-1 Object in Third Quadrant

68/72
From equation (5.1-2), unit vector QS
QS is,
−−
=
=
δδδ
sin
)sin(cos
)cos(cos
'
'
'
H
H
N
M
L
QS
QS
e
e
e
Vector PàQ in Xe’-Ye’-Ze’ coordinate is,
=
=
0
cos
sin
'
'
'
H
H
r
Z
Y
X
PQ
e
e
e
From equation (5.1-4), vector OàS in Xdome-Ydome-Zdome coordinate is,
+++
=
−+−
−−+
−−
−+
−+−
−+
−+
=
+
−−
+
−
−−
−
−
=
=
FkC
EkB
DkA
HkHrZ
HkHr
HkHrX
Z
X
H
H
kHr
Hr
Z
Y
X
OS
dome
dome
dome
dome
dome
dome
dome
δπ
φδπ
φπ
φ
δ
δπ
φδπ
φπ
φ
δδδ
πφ
πφ
πφ
πφ
sin2
cos)cos(cos2
sinsin2
sin
)sin(coscos
sin2
sin)cos(cos2
cossin2
cos
0
sin
)sin(cos
)cos(cos
0
cos
sin
2cos0
2sin
0102
sin02
cos
0
0
0
0
… Equation (5.6.3-1)
Where,
k: Constant

69/72
δπ
φδπ
φ
δ
δπ
φδπ
φ
πφ
πφ
sin2
cos)cos(cos2
sin
)sin(cos
sin2
sin)cos(cos2
cos
sin2
sin
cos
sin2
cos
0
0
−+−
−−=
−=
−+−
−=
−−=
=
−+=
HF
HE
HD
HrZC
HrB
HrXA
dome
dome
… Equation (5.6.3-2)
5.6.4 Object in Fourth Quadrant
Object is in the fourth quadrant (90o < H < 180o) and telescope is in west side of mount.
Ydome(East)
Xdome (South)
Zdome(Zenith)
Object
Ze’ (North Pole)Xe’ (Meridian)
φ : Latitude
H
Ye’ (East)
P
Q
R
r
δ
SDome
O
Telescope is in west side of mount.
90o < H < 180o
Figure 5.6.4-1 Object in Fourth Quadrant

70/72
From equation (5.1-2), unit vector QS
QS is,
−−
=
=
δδδ
sin
)sin(cos
)cos(cos
'
'
'
H
H
N
M
L
QS
QS
e
e
e
Vector PàQ in Xe’-Ye’-Ze’ coordinate is,
−−
−
=
=
02
sin
2cos
'
'
'π
π
H
H
r
Z
Y
X
PQ
e
e
e
From equation (5.1-4), vector OàS in Xdome-Ydome-Zdome coordinate is,
+++
=
−+−
−−+
−
−−
−+
−−
−+−
−+
−
−+
=
+
−−
+
−−
−
−
−−
−
−
=
=
FkC
EkB
DkA
HkHrZ
HkHr
HkHrX
Z
X
H
H
kHr
Hr
Z
Y
X
OS
dome
dome
dome
dome
dome
dome
dome
δπ
φδπ
φππ
φ
δπ
δπ
φδπ
φππ
φ
δδδ
π
π
πφ
πφ
πφ
πφ
sin2
cos)cos(cos2
sin2
cos2
sin
)sin(cos2
sin
sin2
sin)cos(cos2
cos2
cos2
cos
0
sin
)sin(cos
)cos(cos
02
sin
2cos
2cos0
2sin
0102
sin02
cos
0
0
0
0

71/72
… Equation (5.6.4-1)
Where,
k: Constant
δπ
φδπ
φ
δ
δπ
φδπ
φ
ππφ
π
ππφ
sin2
cos)cos(cos2
sin
)sin(cos
sin2
sin)cos(cos2
cos
2cos
2sin
2sin
2cos
2cos
0
0
−+−
−−=
−=
−+−
−=
−
−−=
−−=
−
−+=
HF
HE
HD
HrZC
HrB
HrXA
dome
dome
… Equation (5.6.4-2)
5.6.5 Intersection
Figure 5.6.5-1 shows vector expression of points on a straight line.
O
P
Q
S
Object
Points P, Q and S are on a straight line.
PQkOPPSOPOS
PQkPS
+=+=
=
Where k is a scalar.
PS
PQ
OP
OS
Figure 5.6.5-1 Vector Expression of Points on a Straight Line

72/72
Since point S is on the dome surface, length of vector OàS is R.
( ) ( ) ( ) 2222 RFkCEkBDkA =+++++
Then,
( ) ( ) ( ) 02 22222222 =−−−−+++++ CBARkCFBEADkFED
Solving this equation for k,
( ) ( ) ( )( )222
22222222
FED
CBARFEDCFBEADCFBEADk
++−−−++++++++−
=
… Equation (5.6.5-1)
+++
=
=
FkC
EkB
DkA
Z
Y
X
OS
dome
dome
dome
… Equation (5.6.5-2)
From equations (5.1-5) and (5.1-6), azimuth and elevation of dome slit are,
dome
domedome X
YA =− )tan( … Equation (5.6.5-3)
When Xdome >= 0, (-Adome) is in the first quadrant or the fourth quadrant.
When Xdome < 0, (-Adome) is in the second quadrant or the third quadrant.
Azimuth, Adome is measured from south to westward.
RZ
h domedome =sin … Equation (5.6.5-4)
-π/2 (-90o) <= hdome <= +π/2 (+90o)










![Convergence of Wachspress coordinates: from polygons to ...jiri/papers/14KoBa.pdf · convex polygons are Wachspress coordinates [14], mean value coordinates [4], and harmonic coordinates](https://img.pdfslide.us/doc/110x75/5f6dfe23261f61015179236e/convergence-of-wachspress-coordinates-from-polygons-to-jiripapers-convex.jpg)











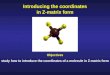

![Interpolation via Barycentric Coordinates · • Moving least squares coordinates [Manson and Schaefer, 2010] • Cubic mean value coordinates [Li and Hu, 2013] • Poisson coordinates](https://img.pdfslide.us/doc/110x75/6062738927364e51e610e629/interpolation-via-barycentric-coordinates-a-moving-least-squares-coordinates-manson.jpg)



