-
Springer Undergraduate Textsin Mathematics and Technology
-
Series Editors
Jonathan M. BorweinHelge Holden
Editorial Board
Lisa GoldbergArmin Iske
Palle E.T. JorgensenStephen M. Robinson
-
Christiane RousseauYvan Saint-Aubin
Mathematics and Technology
With the participation of Helene Antaya and Isabelle
Ascah-Coallier
Chris Hamilton, Translator
123
-
Christiane Rousseau Yvan Saint-AubinDepartement de mathematiques
Departement de mathematiques
et de statistique et de statistiqueUniversite de Montreal
Universite de MontrealC.P. 6128, Succursale Centre-ville C.P. 6128,
Succursale Centre-villeMontreal, Quebec H3C 3J7 Montreal, Quebec
H3C 3J7Canada [email protected]
[email protected]
Series EditorsJonathan M. Borwein Helge HoldenFaculty of
Computer Science Department of Mathematical SciencesDalhousie
University Norwegian University of Science andHalifax, Nova Scotia
B3H 1W5 TechnologyCanada Alfred Getz vei [email protected]
NO-7491 Trondheim
[email protected]
ISBN: 978-0-387-69215-9 e-ISBN: 978-0-387-69216-6DOI:
10.1007/978-0-387-69216-6
Library of Congress Control Number: 2008926885
Mathematics Subject Classification (2000):
00-01,03-01,42-01,49-01,94-01,97-01
c 2008 Springer Science+Business Media, LLCAll rights reserved.
This work may not be translated or copied in whole or in part
without the written permission of thepublisher (Springer
Science+Business Media, LLC, 233 Spring Street, New York, NY 10013,
USA), except for briefexcerpts in connection with reviews or
scholarly analysis. Use in connection with any form of information
storage andretrieval, electronic adaptation, computer software, or
by similar or dissimilar methodology now known or
hereafterdeveloped is forbidden.The use in this publication of
trade names, trademarks, service marks, and similar terms, even if
they are not identifiedas such, is not to be taken as an expression
of opinion as to whether or not they are subject to proprietary
rights.
Printed on acid-free paper
springer.com
-
Preface
Of what use is mathematics? Hasnt everything in mathematics
already been discov-ered? These are natural questions often asked
by undergraduates. The answers providedby their professors are
often quite brief. Most university courses, pressed for time
andrigidly structured, offer little opportunity to present and
study actual applications andreal-world examples.
Even more high-school students ask the same questions with more
insistence. Teach-ers in these schools generally work under even
tighter constraints than university profes-sors. If they are able
to competently respond to these questions it is probably
becausethey received good answers from their teachers and
professors. And if they do not havethe answers, then whose fault is
it?
The genesis of this text
It is impossible to introduce this text without first discussing
the course in which itoriginated. The course Mathematics and
Technology was created at the Universitede Montreal and taught for
the first time in the winter semester of 2001. It was createdafter
observing that most courses in the department neglect to present
real applications.Since its creation the course has been open to
both undergraduate mathematics studentsand future high-school
teachers.
Since no appropriate text or manual for the course we envisioned
existed, we wereled to write our own course notes, from which we
taught. We got so caught up inwriting these notes that they quickly
grew to the size of a textbook, containing muchmore material than
could possibly be taught in one semester. Despite the two of
usbeing career mathematicians, we must admit that we both knew
little or nothing aboutmost of the applications presented in the
following chapters.
The goal of the Mathematics and Technology course
The primary goals of the course are to demonstrate the active
and evolving character ofmathematics, its omnipresence in the
development of technologies, and to initiate stu-dents into the
process of modeling as a path to the development of various
mathematicalapplications.
-
VI Preface
Although a few of the included subjects fall outside the strict
domain of technology,we hope to make it clear that, yes,
mathematics is useful, and it plays a major rolein everyday
technologies. Several of the subjects treated in this text are
still beingactively developed, and this allows students to see,
often for the first time, that the fieldof mathematics remains open
and dynamic.
Since the students taking our course include future high
school-teachers, it is impor-tant to stress that the point is not
simply to provide them with examples and applica-tions that they
can repeat to their future students, but rather to give them the
tools toformulate and develop real-world examples appropriate to
their students. They shouldbe instilled with the feeling that they
are teaching a subject that is intrinsically elegant,of course, but
whose applications have helped shape our physical environment and
ourunderstanding of it.
The choice of subjects
In choosing subjects we have paid particular attention to the
following points:
The applications should be recent or affect the students
day-to-day life. Moreover,contrary to the mature mathematics
typically taught in other undergraduate courses,some of the
mathematics used should be modern or even still in development.
The mathematics should be relatively elementary and if it
exceeds the typical first-year undergraduate curriculum (calculus,
linear algebra, probability theory), themissing pieces must be
covered within the chapter. A special effort is made to
makeextensive use of high-school-level mathematics, particularly
Euclidean geometry. Ba-sic high-school and undergraduate
mathematics form a remarkable toolkit, providedthey are well
understood and mastered, allowing students to readily explore
theirwide applications and, often for the first time, to discover
their power when usedtogether.
The level of mathematical sophistication required should remain
at a minimum:ideas are a scientists most precious commodity, and
behind most technological suc-cesses there lies a brilliant yet
sometimes elementary observation.
As a result, the mathematics used in the book covers a very wide
spectrum:
Lines and planes appear in all of their forms (regular
equations, parametric equa-tions, subspaces), often in unexpected
ways (using the intersection of several planesto decode a
ReedSolomon encoded message).
A large number of subjects make use of basic geometric objects:
circles, spheres,and conics. The concept of locus of points in
Euclidean geometry is often repeated,for example in problems where
we calculate the position of an object through trian-gulation
(Chapter 1 on GPS, and Chapter 15 on Science Flashes).
The different types of affine transformations in the plane or in
space (in particularrotation and symmetries) appear several times:
in Chapter 11 on image compressionusing fractals, in Chapter 2 on
mosaics and friezes, and in Chapter 3 on robot motion.
Finite groups appear as symmetry groups (Chapter 2 on mosaics
and friezes) andalso in the development of primality tests in
cryptography (Chapter 7).
-
Preface VII
Finite fields make an appearance in Chapter 6 on
error-correcting codes, in Chapter1 on GPS and in Chapter 8 on
random-number generation.
Chapter 7 on cryptography and Chapter 8 on random-number
generation both makeuse of arithmetic modulo n, while Chapter 6 on
error-correcting codes makes use ofarithmetic modulo 2.
Probability theory appears in several unexpected places: in
Chapter 9 on GooglesPageRank algorithm, and in the construction of
large prime numbers in Chapter 7.It is also used more classically
in Chapter 8 on random-number generation.
Linear algebra is omnipresent: in Chapter 6 on Hamming and
ReedSolomon codes,in Chapter 9 on the PageRank algorithm, in
Chapter 3 on robot motion, in Chapter2 on mosaics and friezes, in
Chapter 1 on GPS, in Chapter 12 on the JPEG standard,etc.
Using this book as a course text
The text is written for students who have a familiarity with
Euclidean geometry and havemastered multivariable calculus, linear
algebra, and elementary probability theory. Wehope that we have not
implicitly assumed any other background knowledge. Workingthrough
the text nonetheless requires a certain scientific maturity: it
involves integratinga variety of mathematical tools in a setting
different from the one in which they wereoriginally taught. For
that reason, undergraduates in their junior or senior years arethe
ideal audience for the course.
The text presents applications in two forms: the main chapters
(all except Chapter15) are long and detailed, while the Science
Flashes (sections of Chapter 15) are shortand narrow in scope.
Readers will notice a certain unity in the form of the
longerchapters: the first sections describe the application and the
underlying mathematicalproblem; this is followed by an exploration
of simple cases of the problem and, if neces-sary, a development of
the required mathematics. We call these parts the basic portionof
the chapter. Afterward, one or more sections may explore
more-complicated exam-ples, provide more details to the
mathematical tools discussed earlier, or simply discussthe fact
that mathematics alone is not always sufficient! We refer to this
latter part ofa chapter as the advanced portion. Each application
is typically covered in 56 hoursof class: two hours for the basic
theory, two hours for examples and exercises and, iftime permits,
one or two hours for advanced topics. Often we are able only to
touchbriefly on the advanced material, unless a second week is
spent on the chapter. EachScience Flash can be treated in an hour
of class or even assigned as an exercise withoutbeing preceded by
any theory development. During a single semester we aim to covera
significant part of 8 to 12 chapters and a handful of Science
Flashes. Another optionis to significantly reduce the number of
chapters being covered and to dig further intotheir advanced
sections.
We are thus forced to select subjects as a function of their
intrinsic interest or thestudents mathematical knowledge. The
chapters not selected or the advanced portionsof those that were
covered are natural points of departure for course projects.
Self-guided students who are reading this text on their own may
simply jump from chapter
-
VIII Preface
to chapter as the mood strikes them. Each chapter is
(mathematically) independent (orvery nearly so), and any links
among them are explicitly stated.
One last note for professors using this book as a course text.
Teaching this coursehas forced us to revise our usual pedagogical
methods: here no subject is prerequisite forfurther courses, the
definitions and theorems are not the ultimate goals of the course,
andthe problems are not drill. These factors can cause some anxiety
on the students side.Moreover, we are not specialists in any of the
technologies we discuss here. So we hadto revise our teaching. We
try to make as many links as possible to the technology.
Weencourage students to participate in the course. This allows us
to check their backgroundrelative to the mathematical tools being
used. As for exams, we choose to reassure themfrom the beginning by
stating that the exams are open book, noncumulative, and limitedto
the basic material. Emphasis is put on simple mathematical modeling
and problemsolving. Our sets of exercises focus on these
skills.
Using this book as a self-directed reader
During the writing of this text we have always been passionate
about presenting themathematics underlying technology and
demonstrating both its intrinsic beauty andpower. We believe that
this text will be of interest to any reader, from young scientistto
experienced mathematician, curious to understand the mathematics
that drives tech-nological innovation. Since the chapters are
largely independent, the reader can hopfrom subject to subject at
will. Hopefully, the reader will be equally interested in themany
historical notes scattered throughout the text and, who knows, even
find time towork through a few of the exercises.
The contributions of Helene Antaya and Isabelle
Ascah-Coallier
The first draft of Chapter 14 on the calculus of variations was
written by Helene Antayaduring a summer internship at the end of
her junior college. Chapter 13 on computingwith DNA was written the
following summer by Helene Antaya and Isabelle Ascah-Coallier while
they were supported by an Undergraduate Student Research Award
fromthe National Sciences and Engineering Research Council (NSERC)
of Canada.
How to use the chapters
For the most part, chapters are independent. The beginning of
each chapter contains abrief how-to, describing the required basic
knowledge, the relationships between thesections, and, if
necessary, their relative difficulty.
Christiane RousseauYvan Saint-Aubin
Departement de mathematiques et de statistiqueUniversite de
MontrealJune 2008
-
Preface IX
Acknowledgments
The genesis of the Mathematics and Technology course and
accompanying coursenotes can be traced back to the winter of 2001.
We had to learn a variety of subjectsthat we knew only incidentally
or not at all, and also had to construct sets of exercisesand
student projects. Throughout the many years of evolution of this
text we haveasked numerous questions that required a great level of
explanation. We would like tothank those who have supported us in
this endeavor. Their assistance has helped usreduce the inevitable
ambiguities and errors; we are responsible for any that remain,and
we invite our readers to report any they may find.
We learned much from Jean-Claude Rizzi, Martin Vachon, and Annie
Boily, all fromHydro-Quebec, who helped us learn about storm
tracking; from Stephane Durand andAnne Bourlioux about the finer
points of GPS; from Andrew Granville on recent inte-ger
factorization algorithms; from Mehran Sahami about the inner
workings of Google;from Pierre LEcuyer about random-number
generators; from Valerie Poulin and IsabelleAscah-Coallier about
how quantum computers function; from Serge Robert, Jean
Le-Tourneux, and Anik Souliere on the relationship between math and
music; from PaulRousseau and Pierre Beaudry about basic computer
architecture; from Mark Goreskyabout linear shift registers and the
properties of the sequences they generate. DavidAustin, Robert
Calderbank, Brigitte Jaumard, Jean LeTourneux, Robert Moody,
PierrePoulin, Robert Roussarie, Kaleem Siddiqi, and Loc Teyssier
provided us with referencesand precious commentary.
Many of our friends and colleagues read portions of the
manuscript and provided uswith feedback, notably Pierre Bouchard,
Michel Boyer, Raymond Elmahdaoui, Alexan-dre Girouard, Martin
Goldstein, Jean LeTourneux, Francis Loranger, Marie Luquette,Robert
Owens, Serge Robert, and Olivier Rousseau. Nicolas Beauchemin and
AndreMontpetit helped us on more than one occasion with graphics
and the subtleties ofLATEX. We were lucky to have colleagues
Richard Duncan, Martin Goldstein, and RobertOwens help us with the
English terminology.
Since the first draft we have freely shared our manuscript. Many
of our friendsand colleagues have encouraged us throughout this
adventure, including John Ball,Jonathan Borwein, Bill Casselman,
Carmen Chicone, Karl Dilcher, Freddy Dumortier,Stephane Durand,
Ivar Ekeland, Bernard Hodgson, Nassif Ghoussoub, Frederic
Gour-deau, Jacques Hurtubise, Louis Marchildon, Odile Marcotte, and
Pierre Mathieu.
We wish to thank Chris Hamilton, who worked for many months on
the excellentEnglish translation of our manuscript. Moreover, it
was a great pleasure working withhim. We appreciate his judicious
commentary and suggestions. His clever adaptations,when needed, and
his discovery of many errors helped to improve the original
Frenchversion of the text.
We thank David Kramer, our copyeditor for his expert assistance
and excellentsuggestions. We are grateful to Ann Kostant and
Springer, who showed great interestin our book, from the first
version to the printed one.
-
X Preface
We would also like to thank those nearest to us, Manuel Gimenez,
Serge Robert,Olivier Rousseau, Valerie Poulin, Anague Robert, and
Chi-Thanh Quach, who havealways supported us, including listening
to us talk about this project over the years.
-
Contents
Preface . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . V
1 Positioning on Earth and in Space . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . 11.1 Introduction . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 11.2 Global Positioning System . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
1.2.1 Some Facts about GPS . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . 21.2.2 The Theory Behind GPS . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
31.2.3 Dealing with Practical Difficulties. . . . . . . . . . . . .
. . . . . . . . . . . . . 6
1.3 How Hydro-Quebec Manages Lightning Strikes . . . . . . . . .
. . . . . . . . . . . . 121.3.1 Locating Lightning Strikes . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.3.2
Threshold and Quality of Detection . . . . . . . . . . . . . . . .
. . . . . . . . 151.3.3 Long-Term Risk Management . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . 18
1.4 Linear Shift Registers . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 191.4.1 The
Structure of the Field Fr2 . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 221.4.2 Proof of Theorem 1.4 . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
1.5 Cartography . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 271.6
Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 36
References . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
43
2 Friezes and Mosaics . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . 452.1 Friezes
and Symmetries . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 482.2 Symmetry Group and Affine
Transformations . . . . . . . . . . . . . . . . . . . . . . 522.3
The Classification Theorem . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . 582.4 Mosaics . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 642.5 Exercises . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . 67
References . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
83
-
XII Contents
3 Robotic Motion . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 853.1
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 85
3.1.1 Moving a Solid in the Plane . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . 873.1.2 Some Thoughts on the Number
of Degrees of Freedom . . . . . . . . 89
3.2 Movements That Preserve Distances and Angles . . . . . . . .
. . . . . . . . . . . . 913.3 Properties of Orthogonal Matrices . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 943.4
Change of Basis . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 1033.5 Different Frames
of Reference for a Robot . . . . . . . . . . . . . . . . . . . . .
. . . . 1063.6 Exercises . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
111
References . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
117
4 Skeletons and Gamma-Ray Radiosurgery . . . . . . . . . . . . .
. . . . . . . . . . . . . 1194.1 Introduction . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . 1194.2 Definition of Two-Dimensional Region Skeletons .
. . . . . . . . . . . . . . . . . . 1204.3 Three-Dimensional
Regions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 1304.4 The Optimal Surgery Algorithm . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . 1324.5 A
Numerical Algorithm . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 134
4.5.1 The First Part of the Algorithm. . . . . . . . . . . . . .
. . . . . . . . . . . . . . 1354.5.2 Second Part of the Algorithm .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1394.5.3
Proof of Proposition 4.17 . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 140
4.6 Other Applications of Skeletons . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . 1424.7 The Fundamental
Property of the Skeleton . . . . . . . . . . . . . . . . . . . . .
. . . 1434.8 Exercises . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
147
References . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
153
5 Savings and Loans . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 1555.1
Banking Vocabulary . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . 1555.2 Compound Interest .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 1565.3 A Savings Plan . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. 1595.4 Borrowing Money . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 1615.5 Appendix:
Mortgage Payment Tables . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 1645.6 Exercises . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . 168
References . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
171
6 Error-Correcting Codes . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 1736.1
Introduction: Digitizing, Detecting and Correcting . . . . . . . .
. . . . . . . . . 1736.2 The Finite Field F2 . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1786.3 The C(7, 4) Hamming Code . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . 1796.4 C(2k 1, 2k k 1)
Hamming Codes . . . . . . . . . . . . . . . . . . . . . . . . . . .
. 1826.5 Finite Fields . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1856.6
ReedSolomon Codes . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . 193
-
Contents XIII
6.7 Appendix: The Scalar Product and Finite Fields . . . . . . .
. . . . . . . . . . . . 1986.8 Exercises . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 200
References . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
207
7 Public Key Cryptography . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 2097.1 Introduction . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 2097.2 A Few Tools from Number Theory
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2107.3 The Idea behind RSA . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 2137.4 Constructing
Large Primes . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 2217.5 The Shor Factorization Algorithm . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2317.6
Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 234
References . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
239
8 Random-Number Generators . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . 2418.1 Introduction . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 2418.2 Linear Shift Registers . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . 2458.3 Fp-Linear Generators . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 248
8.3.1 The Case p = 2 . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . 2488.3.2 A Lesson on
Gambling Machines . . . . . . . . . . . . . . . . . . . . . . . . .
. . 2538.3.3 The General Case . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . 253
8.4 Combined Multiple Recursive Generators . . . . . . . . . . .
. . . . . . . . . . . . . . . 2558.5 Conclusion . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 2578.6 Exercises . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . 258
References . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
263
9 Google and the PageRank Algorithm . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . 2659.1 Search Engines . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 2659.2 The Web and Markov Chains . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 2689.3 An
Improved PageRank . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . 2789.4 The Frobenius Theorem . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . 2819.5 Exercises . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
284
References . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
289
10 Why 44,100 Samples per Second? . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . 29110.1 Introduction . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 29110.2 The Musical Scale . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . 29210.3 The Last Note (Introduction to Fourier Analysis) .
. . . . . . . . . . . . . . . . . 29610.4 The Nyquist Frequency and
the Reason for 44,100 . . . . . . . . . . . . . . . . . . 30710.5
Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 317
References . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
323
-
XIV Contents
11 Image Compression: Iterated Function Systems . . . . . . . .
. . . . . . . . . . . 32511.1 Introduction . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 32511.2 Affine Transformations in the Plane . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 32711.3 Iterated
Function Systems . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 33011.4 Iterated Contractions and Fixed
Points . . . . . . . . . . . . . . . . . . . . . . . . . . .
33611.5 The Hausdorff Distance . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 34011.6 Fractal
Dimension . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 34511.7 Photographs as Attractors
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 35011.8 Exercises . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
361
References . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
367
12 Image Compression: The JPEG Standard . . . . . . . . . . . .
. . . . . . . . . . . . . 36912.1 Introduction . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 36912.2 Zooming in on a JPEG-Compressed Digital Image
. . . . . . . . . . . . . . . . . . 37212.3 The Case of 2 2 Blocks
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . 37312.4 The Case of N N Blocks . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . 37812.5 The
JPEG Standard . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 38812.6 Exercises . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 396
References . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
401
13 The DNA Computer . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 40313.1
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 40313.2 Adlemans
Hamiltonian Path Problem . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 40513.3 Turing Machines and Recursive Functions . . .
. . . . . . . . . . . . . . . . . . . . . . 409
13.3.1 Turing Machines . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . 40913.3.2 Primitive
Recursive Functions and Recursive Functions . . . . . . . 416
13.4 Turing Machines and InsertionDeletion Systems . . . . . . .
. . . . . . . . . . . . 42613.5 NP-Complete Problems . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
430
13.5.1 The Hamiltonian Path Problem . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 43013.5.2 Satisfiability . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . 431
13.6 More on DNA Computers . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . 43513.6.1 The Hamiltonian
Path Problem and InsertionDeletion Systems 43513.6.2 Current Limits
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 43513.6.3 A Few Biological Explanations
Concerning Adlemans
Experiment . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . 43713.7 Exercises . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 441
References . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
445
-
Contents XV
14 Calculus of Variations . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . 44714.1 The
Fundamental Problem of Calculus of Variations . . . . . . . . . . .
. . . . . 44814.2 EulerLagrange Equation . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . 45114.3 Fermats
Principle . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 45514.4 The Best Half-Pipe. . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 45714.5 The Fastest Tunnel . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
46014.6 The Tautochrone Property of the Cycloid . . . . . . . . . .
. . . . . . . . . . . . . . . 46514.7 An Isochronous Device . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . 46814.8 Soap Bubbles . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
47114.9 Hamiltons Principle . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 47514.10
Isoperimetric Problems. . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . 47914.11 Liquid Mirrors . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 48614.12 Exercises . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 490
References . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
499
15 Science Flashes . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50115.1
The Laws of Reflection and Refraction . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 50115.2 A Few Applications of Conics . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
508
15.2.1 A Remarkable Property of the Parabola . . . . . . . . . .
. . . . . . . . . . . 50815.2.2 The Ellipse . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
51815.2.3 The Hyperbola . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . 52015.2.4 A Few Clever
Tools for Drawing Conics . . . . . . . . . . . . . . . . . . . . .
521
15.3 Quadratic Surfaces in Architecture . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . 52115.4 Optimal Cellular
Antenna Placement . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . 52815.5 Voronoi Diagrams . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53215.6
Computer Vision . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . 53715.7 A Brief Look at
Computer Architecture . . . . . . . . . . . . . . . . . . . . . . .
. . . . 53915.8 Regular Pentagonal Tiling of the Sphere . . . . . .
. . . . . . . . . . . . . . . . . . . . 54415.9 Laying Out a
Highway . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 55115.10 Exercises . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 552
References . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
567
Index . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . 569
-
This page intentionally left blank
-
1
Positioning on Earth and in Space
This chapter is the best example in the book of how diverse the
applications of mathe-
matics can be to a simple technical question: how can one locate
people or events on
Earth? This diversity is striking, and to spend more than one
week on this chapter
can be a good idea for that reason. Two hours are sufficient to
cover the theory behind
GPS (Section 1.2) and to briefly touch upon the application of
GPS to storm tracking
(Section 1.3). Afterward, there is a choice to be made. If you
have already introduced
finite fields in Chapter 6 on error-correcting codes or Chapter
8 on random-number
generators, then the mechanics of the GPS signal can be covered
in a little more than
an hour, since you may skip the review of finite fields. If time
is limited and finite fields
have not yet been introduced, a reasonable compromise is simply
to state Theorem 1.4
and to illustrate it using several examples such as Example 1.5.
Section 1.5 on car-
tography will require a minimum of two hours, unless the
students are already familiar
with the notion of conformal maps. Section 1.2 requires only
Euclidean geometry and
basic linear algebra, while Section 1.3 uses elementary
probability concepts. Section 1.4
is more difficult unless one has some knowledge of finite
fields. Section 1.5 makes use
of multivariable calculus.
1.1 Introduction
Since the beginning of time man has been interested in
determining his position onthe Earth. He started with primitive
instruments, navigating through the use of themagnetic compass, the
astrolabe, and later the sextant. Recent history has seen
thedevelopment of significantly more complex and accurate
navigational aids, such as theGlobal Positioning System (GPS). In
this chapter we walk backward through time:we will start by
discussing modern-day GPS, followed by a brief discussion of
ancienttechniques, mostly in the exercises.
Since such navigational techniques are really useful only if we
have accurate mapsof the world, we will dedicate a section to
cartography. Since the Earth is a sphere,
C. Rousseau and Y. Saint-Aubin, Mathematics and Technology,DOI:
10.1007/978-0-387-69216-6 1, c Springer Science+Business Media, LLC
2008
-
2 1 Positioning on Earth and in Space
it is impossible to represent it on a sheet of paper in a manner
that preserves angles,relative distances, and relative areas. The
chosen compromise depends largely on theapplication. The Peters
Atlas has chosen to use projections that preserve relative area[2].
Marine charts, on the other hand, have chosen projections that
preserve angles.
1.2 Global Positioning System
1.2.1 Some Facts about GPS
The GPS constellation of satellites was completed in July 1995
by the Defense Depart-ment of the USA, and was authorized for use
by the general public. When it was firstdeployed, the system
consisted of 24 satellites designed such that at least 21 would
befunctioning 98% of the time. In 2005 the system consisted of 32
satellites, of which atleast 24 are to be functioning while the
others are ready to take over in case a satellitefails. The
satellites are positioned 20,200 km from the surface of the Earth.
They aredistributed across 6 orbital planes, each tilted at an
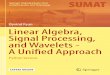
angle of 55 degrees to the equa-torial plane (see Figure 1.1).
There are at least 4 satellites per orbital plane,
roughlyequidistant from each other. Each satellite completes a
circular orbit around the Earthin 11 hours and 58 minutes. The
satellites are situated such that at any moment andat any location
on Earth we may observe at least 4 satellites.
Fig. 1.1. The 24 satellites on 6 orbital planes.
The 24 satellites emit a signal that repeats periodically, and
which is received withthe aid of a special receiver. When we buy a
GPS we are in fact buying a device (whichwe will call the receiver)
that receives the GPS signals and uses the information inthem to
calculate its location. It contains an almanac with which it is
able to calculatethe absolute position of each satellite at any
given moment of time. However, sinceslight errors in the orbit are
inevitable, correcting information for each satellite is coded
-
1.2 Global Positioning System 3
directly within the emitted signal (this correcting information
is updated every hour).Each satellite emits its signal
continuously. The period of the signal is fixed, and thestart time
of the cycle may be determined through the use of the almanac.
Additionally,each satellite is equipped with an extremely precise
atomic clock allowing it to staysynchronized to the start times
contained in the almanac. When a receiver records asignal from a
satellite, it immediately starts comparing it with one that it
generatesand that is supposed to match perfectly the one received.
In general, these signals willnot immediately match. Thus, the
receiver shifts the copy it generates until it is inphase with the
received signal (which it determines through calculating the
correlationbetween the two). In such a manner, the device is able
to calculate the time it takes forthe signal to arrive from the
satellite. We will discuss this system in much more detailin
Section 1.4.
The system described above is the standard precision GPS system.
In absenceof more sophisticated ground-based corrections, it
permits the calculation of receiverposition to about 20 meters.
Prior to May 2000, the Department of Defense
intentionallyintroduced inaccuracies to the satellite signals in
order to reduce the precision of thesystem to 100 meters.
1.2.2 The Theory Behind GPS
How does the receiver calculate its position? We will start by
assuming that theclocks of the receiver and all of the satellites
are perfectly synchronized. The receivercalculates its position
through triangulation. The basic principle of triangulation
meth-ods is to determine where a person (object) is located by
using some knowledge relatingthe position of the person (object)
with respect to reference objects whose positions areknown. In the
case of the receiver of the GPS, it calculates its distance to the
satellites,whose positions are known.
The receiver measures the time t1 it takes for the signal
emitted from satellite P1to reach it. Given that the signal travels
at the speed of light c, the receiver cancalculate its distance
from the satellite as r1 = ct1. The set of points situated at
adistance r1 from the satellite P1 forms a sphere S1 centered at P1
with radius r1. Sowe know that the receiver is on S1. Consider
these points as defined in a Cartesiancoordinate system. Let (x, y,
z) be the unknown position of the receiver and let(a1, b1, c1) be
the known position of the satellite P1. Then (x, y, z) must satisfy
theequation describing points on the sphere S1, namely
(x a1)2 + (y b1)2 + (z c1)2 = r21 = c2t21. (1.1)
This piece of information is insufficient to determine the
precise position of thereceiver. The receiver therefore records the
signal of a second satellite P2, recordingthe time t2 that the
signal took to arrive and calculating the distance r2 = ct2 tothe
satellite. As before, it must be that the receiver lies on the
sphere S2 of radiusr2 centered at (a2, b2, c2):
-
4 1 Positioning on Earth and in Space
(x a2)2 + (y b2)2 + (z c2)2 = r22 = c2t22. (1.2)
This narrows down our search, since the intersection of two
overlapping spheres isa circle. Thus, we have now narrowed down the
position of the receiver to a circleC1,2 on which the receiver must
lie. However, we again do not know precisely wherethe receiver is
on this circle.
In order for the receiver to calculate its final position, it
needs to capture and processthe signal received from a third
satellite P3. Once again, the receiver measures thetime t3 for the
signal to arrive and calculates its distance r3 = ct3 from it. As
before,it follows that the receiver lies somewhere on the sphere S3
of radius r3 centered at(a3, b3, c3):
(x a3)2 + (y b3)2 + (z c3)2 = r23 = c2t23. (1.3)The receiver is
therefore at the intersection of the circle C1,2 and the sphere
S3.Since a sphere and a circle intersect at two points, it may seem
that we are not yetsure of the position of the receiver.
Fortunately, this is not the case. In fact, thesatellites have been
positioned such that one of the two solutions will be
completelyunrealistic, being quite far away from the surface of the
Earth. Thus, by finding thetwo solutions of the system () of
equations formed by equations (1.1), (1.2), and(1.3), and
subsequently eliminating the spurious solution, the receiver may
calculateits precise position.
Solving the system (). The equations of system () are quadratic,
not linear, whichcomplicates the solution. You may have observed,
however, that if we subtract one ofthe equations from another we
obtain a linear equation, since the terms x2, y2, and z2
cancel. Thus, we replace the system () by an equivalent system
obtained by replacingthe first equation by (1.1)(1.3) and the
second equation by (1.2)(1.3) and by keepingthe third equation.
This results in the system
2(a3 a1)x + 2(b3 b1)y + 2(c3 c1)z = A1, (1.4)2(a3 a2)x + 2(b3
b2)y + 2(c3 c2)z = A2, (1.5)
(x a3)2 + (y b3)2 + (z c3)2 = r23 = c2t23, (1.6)
where
A1 = c2(t21 t23) + (a23 a21) + (b23 b21) + (c23 c21),A2 = c2(t22
t23) + (a23 a22) + (b23 b22) + (c23 c22).
(1.7)
The satellites have been placed in such a manner that no three
satellites will ever fallalong a line. This property guarantees
that at least one of the 2 2 determinants
a3 a1 b3 b1a3 a2 b3 b2
,
a3 a1 c3 c1a3 a2 c3 c2
,
b3 b1 c3 c1b3 b2 c3 c2
is nonzero. In fact, if all three determinants are zero, then
the vectors (a3 a1, b3 b1, c3 c1) and (a3 a2, b3 b2, c3 c2) are
collinear (their cross product is zero),implying that the three
points P1, P2, and P3 fall on a line.
-
1.2 Global Positioning System 5
Suppose that the first determinant is nonzero. Using Cramers
rule, the first twoequations of (1.6) can give us solutions for x
and y as a function of z:
x =
A1 2(c3 c1)z 2(b3 b1)A2 2(c3 c2)z 2(b3 b2)
2(a3 a1) 2(b3 b1)2(a3 a2) 2(b3 b2)
,
y =
2(a3 a1) A1 2(c3 c1)z2(a3 a2) A2 2(c3 c2)z
2(a3 a1) 2(b3 b1)2(a3 a2) 2(b3 b2)
.
(1.8)
Substituting these values into the third equation of (1.6)
yields a quadratic equationin z, which we may solve to find the two
solutions z1 and z2. Back-substituting z forthe values z1 and z2
into the two above equations yields the corresponding values x1,x2,
y1, and y2. We could easily find closed forms to these solutions,
but the formulasinvolved quickly become too large to offer any
insight or convenience.
Choosing the axes of our coordinate system. Nowhere in the above
discussiondid we mention or were we forced to choose a set of axes
for our coordinate system.However, to facilitate the translation
from absolute coordinates to latitude, longitude,and altitude we
make the following choice:
the center of the coordinate system is the center of the Earth;
the z axis passes through the two poles, and is oriented toward the
North Pole; the x and y axes both lie in the equatorial plane; the
positive x axis passes through the point of 0 degrees longitude;
the positive y axis passes through the point of longitude 90
degrees west;Since the radius R of the Earth is approximately 6365
km, a solution (xi, yi, zi) isconsidered acceptable if x2i + y
2i + z
2i (6365 50)2. The uncertainty of 50 km allows a
window for the altitudes of mountains and airplanes. A more
natural coordinate systemfor expressing points near the surface of
the Earth is the longitude L, the latitude l,and the distance h
from the center of the Earth (the altitude above sea level is
thereforegiven by h R). Longitude and latitude are angles that will
be expressed in degrees.If a point (x, y, z) lies exactly on the
sphere of radius R (in other words, if the point liesat altitude
zero), then its longitude and latitude may be found by solving the
followingsystem of equations:
x = R cos L cos l,y = R sinL cos l,z = R sin l.
(1.9)
Since l [90, 90], we obtain
-
6 1 Positioning on Earth and in Space
l = arcsinz
R, (1.10)
allowing us to calculate cos l. The longitude L is therefore
uniquely determined by thetwo equations
cos L =x
R cos l,
sinL =y
R cos l.
(1.11)
Calculating the position of the receiver. Let (x, y, z) be the
position of the receiver.We begin by calculating the distance h of
the receiver from the center of the Earth, givenby
h =
x2 + y2 + z2.
We now have two choices for calculating the latitude and
longitude: adapt the formulas(1.10) and (1.11) by replacing all
occurrences of R with h, or project the position (x, y, z)to the
surface of the sphere and use these values in the equations (1.10)
and (1.11):
(x0, y0, z0) =(
xR
h, y
R
h, z
R
h
)
.
The altitude of the receiver is given by h R.
1.2.3 Dealing with Practical Difficulties.
We have just presented the theory behind calculating the
position, which holds truein a perfect world. Unfortunately, real
life is vastly more complicated, since the timesbeing measured are
extremely short and must be measured to high precision.
Thesatellites are each equipped with an extremely precise (and
expensive!) atomic clockallowing them to be (very nearly) perfectly
in sync. Meanwhile, the average receiveris typically equipped with
only a mediocre clock, allowing it to be within the budgetof most
everyone. Assuming that the clocks of the satellites are in sync,
the receiveris easily capable of calculating precise transit times
for the signals from the satellites.However, given that the
receiver is not perfectly in sync, it will actually be
calculatingthree fictitious transit times T1, T2, and T3. How do we
deal with these inaccuratemeasurements? When we had three unknowns,
x, y, z, we had needed three measuredtimes t1, t2, t3, to find the
unknowns. Now the fictitious time Ti measured by the receiveris
given by
Ti = (arrival time of the signal on the receivers clock)
(departure time of the signal on the satellites clock).
The solution comes from the fact that the error between the
fictitious time Ti calculatedby the receiver and the actual time ti
is the same, regardless of the satellite from whichthe measurement
was taken. That is, Ti = + ti, for i = 1, 2, 3, where
-
1.2 Global Positioning System 7
ti = (arrival time of the signal on the satellites clock)
(departure time of the signal on the satellites clock)
and is given by the equation
= (arrival time of the signal on the receivers clock) (arrival
time of the signal on the satellites clock). (1.12)
The constant represents the clock offset between the clocks on
the satellites and thereceivers clock. This introduces a fourth
unknown, , to our original system of threeunknowns x, y, z. In
order to resolve the system of equations to a finite set of
solutionswe must obtain a fourth equation. This is simple to do in
our context: the receiversimply measures the offset signal transit
time T4 between itself and a fourth satelliteP4. Since ti = Ti for
i = 1, . . . , 4, our system then becomes:
(x a1)2 + (y b1)2 + (z c1)2 = c2(T1 )2,(x a2)2 + (y b2)2 + (z
c2)2 = c2(T2 )2,(x a3)2 + (y b3)2 + (z c3)2 = c2(T3 )2,(x a4)2 + (y
b4)2 + (z c4)2 = c2(T4 )2
(1.13)
where we have the four unknowns x, y, z, and . As before, we can
use elementaryoperations to replace three of these quadratic
equations by linear equations. To do thiswe subtract the fourth
equation from each of the first three, resulting in:
2(a4 a1)x + 2(b4 b1)y + 2(c4 c1)z = 2c2(T4 T1) + B1,2(a4 a2)x +
2(b4 b2)y + 2(c4 c2)z = 2c2(T4 T2) + B2,2(a4 a3)x + 2(b4 b3)y +
2(c4 c3)z = 2c2(T4 T3) + B3,
(x a4)2 + (y b4)2 + (z c4)2 = c2(T4 )2,(1.14)
where
B1 = c2(T 21 T 24 ) + (a24 a21) + (b24 b21) + (c24 c21),B2 =
c2(T 22 T 24 ) + (a24 a22) + (b24 b22) + (c24 c22),B3 = c2(T 23 T
24 ) + (a24 a23) + (b24 b23) + (c24 c23).
(1.15)
In the system of equations (1.14), Cramers rule applied to the
first three equationsallows us to determine values for x, y, and z
as a function of :
-
8 1 Positioning on Earth and in Space
x =
2c2(T4 T1) + B1 2(b4 b1) 2(c4 c1)2c2(T4 T2) + B2 2(b4 b2) 2(c4
c2)2c2(T4 T3) + B3 2(b4 b3) 2(c4 c3)
2(a4 a1) 2(b4 b1) 2(c4 c1)2(a4 a2) 2(b4 b2) 2(c4 c2)2(a4 a3)
2(b4 b3) 2(c4 c3)
,
y =
2(a4 a1) 2c2(T4 T1) + B1 2(c4 c1)2(a4 a2) 2c2(T4 T2) + B2 2(c4
c2)2(a4 a3) 2c2(T4 T3) + B3 2(c4 c3)
2(a4 a1) 2(b4 b1) 2(c4 c1)2(a4 a2) 2(b4 b2) 2(c4 c2)2(a4 a3)
2(b4 b3) 2(c4 c3)
,
z =
2(a4 a1) 2(b4 b1) 2c2(T4 T1) + B12(a4 a2) 2(b4 b2) 2c2(T4 T2) +
B22(a4 a3) 2(b4 b3) 2c2(T4 T3) + B3
2(a4 a1) 2(b4 b1) 2(c4 c1)2(a4 a2) 2(b4 b2) 2(c4 c2)2(a4 a3)
2(b4 b3) 2(c4 c3)
.
(1.16)
None of this makes sense unless the denominator is nonzero.
However, the denominatoris zero if and only if the four satellites
are situated in the same plane (see Exercise1). Once again, the
satellites are laid out such that no four of them that are
visiblefrom a given point on the Earth will ever lie in the same
plane. We forward-substitutethe solutions to the first three
equations into the fourth, resulting in a final quadraticequation
in , which yields two solutions 1 and 2. Back-substituting these
into (1.16)yields two possible positions for the receiver, and we
use the same trick as before toeliminate the spurious solution.
Which satellites should the receiver choose if it can see more
than four? Inthis case, the receiver has a choice for which data to
use in the calculations. It makessense to use the data that will
introduce the minimal amount of error. In reality, thetime
measurements are all approximate. This implies that the calculated
distances tothe satellites are only approximate. Graphically, we
could represent the area of incerti-tude by thickening the shell of
each sphere. The intersection of the thick spheres thenbecomes a
set, the size of which is related to the uncertainty of the
solution. Thinkinggeometrically, it is easy to convince ourselves
that the greater the angle between thesurfaces of two intersecting
thick spheres, the smaller the volume of space swept outby the
intersection. Conversely, if the spheres intersect almost
tangentially, then thevolume of intersection (and hence
uncertainty) is bigger. We thus want to choose thespheres Si that
intersect each other at as large an angle as possible (see Figure
1.2).
This is the geometric intuition behind our choice.
Algebraically, we see that thevalues of x, y, and z in terms of are
obtained by dividing by
-
1.2 Global Positioning System 9
Fig. 1.2. A small angle of intersection at the left (loss of
precision) and a large angle at theright.
2(a4 a1) 2(b4 b1) 2(c4 c1)2(a4 a2) 2(b4 b2) 2(c4 c2)2(a4 a3)
2(b4 b3) 2(c4 c3)
.
The smaller the denominator, the larger the error. Thus, we want
to choose the foursatellites that maximize this denominator.
More advanced investigations into this topic would fit easily
into a course project.
A few refinements:
Differential GPS (DGPS): One source of imprecision in GPS comes
from thefact that distances are calculated to the satellites using
the constant c, which is thespeed of light in a vacuum. In reality,
the signal is traveling and refracting throughthe atmosphere, which
both lengthens its trajectory and decreases its speed. Toobtain a
better approximation to the actual average speed of the signal on
the pathfrom the satellite to the receiver we can employ a
differential GPS system. Theidea is to refine the value of c to be
used in calculating satellite distance. We dothis by comparing the
transit time measured at the receiver and the transit timemeasured
at another nearby receiver at a precisely known position. This
allows us toaccurately calculate the average speed of light along
the path from a given satelliteto the receiver, which in turn
results in more accurate distance calculations. Whenhelped with
such a fixed ground station, GPS precision is on the order of
centimeters.
The signal sent by each satellite is a random signal that
repeats at regular knownintervals. The period of the signal is
relatively short, such that the distance coveredby the signal in
one period is on the order of a few hundred kilometers. When
thereceiver sees the beginning of a period of the signal it must
determine at preciselywhich moment in time this period was emitted
from the satellite. A priori we havean uncertainty of some integer
number of periods.
Rapidly moving GPS receiver: installing a GPS receiver on a
fast-moving object (anairplane, for example) is a very natural
application: if an airplane needs to land in
-
10 1 Positioning on Earth and in Space
inclement weather, the pilot needs to know its precise position
at every instant, andthe time to calculate the position must be
reduced to an absolute minimum.
The Earth is not really round! In fact, the Earth is more an
ellipsoid that is slightlyflattened at the poles and bulging at the
equator (an oblate spheroid). The radiusof the Earth is roughly
6356 km at the poles and 6378 km at the equator. Thus,
thecalculations for translating Cartesian coordinates (x, y, z)
into latitude, longitude,and altitude must be refined to
accommodate this fact.
Relativistic corrections. The speed of the satellites is
sufficiently large that all ofthe calculations must be adapted to
account for the effects of special relativity. Infact, the clocks
on the satellites are traveling very fast compared to those on
Earth.As such, the theory of special relativity predicts that these
clocks will run slower thanthose on Earth. Furthermore, the
satellites are in relatively close proximity to theEarth, which has
significant mass. General relativity predicts a small increase in
thespeed of the clocks on board the satellites. As a first
approximation, we may modelthe Earth as a large nonrotating
spherical mass without any electrical charge. Theeffect is
relatively easy to compute using the Schwarzschild metric, which
describesthe effects of general relativity under these simplified
conditions. As it turns out,this simplification is sufficient to
capture the actual effect to high precision. The twoeffects must
both be considered because even though they are in opposite
directions,they only partially cancel each other out. For more
details see [4].
Applications of GPS. The applications of GPS are numerous, and
we name only afew here:
A GPS receiver allows a person to easily find his/her position
when outdoors. Assuch, it is immediately useful to hikers,
kayakers, hunters, sailors, boaters, etc. Mostreceivers allow the
marking of waypoints, which can be saved either when one is
phys-ically present at the location (in which case the receiver has
calculated its position)or by manually entering map coordinates
into the receiver. By joining waypointswith line segments we can in
turn represent a route. The receiver may then provideus with our
position relative to a chosen waypoint or even give us instructions
onhow to follow our route. More sophisticated receivers may even
store detailed mapinformation. The receiver may then display our
position on a portion of the mapappearing on the screen, annotated
with our waypoints and routes.
More and more vehicles (especially taxis) are equipped with GPS
navigation systemsthat allow their drivers to find their way to a
particular address. In Western Europeand North America there exist
several products that provide precise directions tonearly any
address.
Imagine you have an ancient map on which you wish to plot a
route you havefollowed. The route can be saved in the GPS as it is
taken, and later uploaded toa computer with the appropriate
software. Such software can then superimpose thefollowed route on
the digitized map. If you do not already have a digital versionof
the map, you may first scan it and (using appropriate software)
overlay it with
-
1.2 Global Positioning System 11
a coordinate system by simply showing it the location of three
known points (seeExercise 5).
The ubiquitous use of GPS on airplanes allows the size of
airways (imaginary corri-dors of air that airplanes follow between
points) to be decreased while still ensuringthat airplanes on
different airways will stay a safe distance from each other.
A fleet of delivery vehicles may be equipped with GPS receivers
that permit thesimultaneous tracking of all vehicles. Such a system
is presently used to direct taxisin Paris. In this application the
GPS system must be coupled with a communicationsystem allowing the
coordinates of each vehicle to be broadcast (an example of such
asystem is the Global System for Mobile Communications, or GSM).
Similar systemsare used for tracking wildlife in environmental
studies. It is not hard to imaginethe impact on our lives if a car
rental company equipped its fleet with a GPS-GSMsystem, allowing it
to ensure that clients respect the territorial limits imposed bythe
rental contract!
GPS may be used to help blind people find their way. Geographers
use GPS to measure the growth of Mount Everest: this mountain
continues to grow slowly as its glacier, the Khumbu, descends.
Similarly, every twoyears an expedition ascends Mont Blanc to
update its official height at the peak.In the nineties, geographers
once again asked whether K2 was in fact taller thanMount Everest.
Since their 1998 expedition, where they used GPS, the matter isnow
definitely closed: Mount Everest is the tallest mountain on Earth,
at 8830 m. In1954, the height of Everest was estimated at 8848 m by
B. L. Gulatee. At the time,the estimate was computed using
theodolite measurements taken from six stations onthe north Indian
plains (a theodolite is an optical instrument for measuring
angles,used in the field of geodesy).
There are many military applications, considering that the
system was originallydeveloped for the use of the American
military. One such use is the precise guidanceof bombs.
The future: GPS and Galileo. Up until now the United States has
had a monopolyin this market. Given that they maintain exclusive
control over GPS, the Americangovernment can choose to scramble the
GPS signal to block access to it or degradeits accuracy over a
certain region for military reasons (under the NAVWAR program,for
navigational warfare). In March 2002 the European Union and
European SpaceAgency agreed to fund the development and deployment
of Galileo, a positioning systemdesigned as an alternative to GPS.
Two test satellites were launched in 2005 with theremaining 28
satellites to be launched before the end of 2010. GPS satellites do
notactually transmit information regarding the status of the
satellite or the quality of thesignal itself. It can thus take
several hours before a malfunctioning satellite is detectedand shut
down, with the system accuracy being degraded severely during that
time.This restricts the applications of GPS for guiding airplanes
in inclement weather. TheGalileo satellites are designed to
constantly transmit signal quality information, allowingreceivers
to ignore the signal from malfunctioning satellites. This is done
through a
-
12 1 Positioning on Earth and in Space
system of ground stations that accurately measure the actual
position of the satelliteand compare it to the satellites
calculated position. This information is sent to themalfunctioning
satellite, which in turn relays it back to receivers. The US
governmentis planning a similar improvement to the GPS system.
1.3 How Hydro-Quebec Manages Lightning Strikes
New solutions to existing problems often become apparent as new
technology is madeavailable. Hydro-Quebec1 uses GPS as part of its
approach to managing lightningstrikes. Mathematics is at work in
several places in their lightning-strike-monitoringsystem. As such,
this section focuses not only on the application of GPS to
managinglightning strikes, but on the mathematics involved
elsewhere in their approach.
1.3.1 Locating Lightning Strikes
In 1992, Hydro-Quebec installed a lightning strike locating
system throughout its net-work. The basic problem is to determine
the boundaries of areas affected by storms, inorder to reduce the
power transmitted on affected power lines and to reroute it
throughpower lines outside of the stormy area. In doing so, the
potential impact of a lightningstrike on a power line is minimized:
damage caused by a lighting strike is kept local-ized, thereby
minimizing the number of customers affected and increasing the
overallreliability of the power grid.
To accomplish this goal, Hydro-Quebec uses a system of 13
detectors distributedacross the lower two-thirds of the province of
Quebec (the territory covered by powerlines). Their positions are
precisely known, but since the system relies on precise
timemeasurements, the clocks in the detectors are required to be
perfectly synchronized. Todo this, they each use a GPS
receiver.
Using a GPS receiver as a time reference. It may seem a little
surprising that aGPS receiver can be used to tell time. We just
observed that GPS receivers are typicallyequipped with cheap clocks
of relatively low precision. However, we also observed thatin
calculating its position, the receiver calculates , the clock shift
between its clock andthose on board the GPS satellites. Thus, the
receiver actually calculates the precise timeas measured by the
clocks on board the satellites. When great precision is desired
andthe receiver is stationary, it is better to replace the
calculated values of x, y, z, and by the average of several
calculated values (xi, yi, zi, i)Ni=1 at different times.
Indeed,there is an error in each calculation (xi, yi, zi, i). The
errors in space can be in anydirection around the true receiver
position, and they obey a nice statistical law (theyare uniform and
Gaussian). Similarly, the error in the calculation of the time
shift can
1Hydro-Quebec is the largest producer, transporter, and
distributor of electricity in theprovince of Quebec. Its name comes
from the fact that 95% percent of its power generation
ishydroelectric.
-
1.3 How Hydro-Quebec Manages Lightning Strikes 13
be positive or negative. So the position of the receiver and
time shift are more preciselyapproximated by ( 1N
Ni=1 xi,
1N
Ni=1 yi,
1N
Ni=1 zi,
1N
Ni=1 i).
In such a manner, a GPS receiver is capable of synchronizing its
clock to the satelliteswith a precision of roughly 100 nanoseconds
(a nanosecond is 1 billionth of a second).Such an approach is used
in the Hydro-Quebec detectors. Indeed, the GPS allows the13
detectors to synchronize their clocks up to 100 nanoseconds. Once
the receiver issynchronized with the satellites clocks it can also
beat the second, i.e., send a pulseevery second. This is used for
other measurements.
Locating lightning strikes. In addition to maintaining a
synchronized clock, the 13detectors are also responsible for
monitoring all abnormal electromagnetic activity andidentifying
such activity caused by lightning strikes. Hydro-Quebec has
positioned thedetectors quite far from the actual power lines since
the electromagnetic fields causedby the power lines would disrupt
accurate signal detection. The detectors are typicallyplaced on the
roof of Hydro-Quebec management buildings, distributed as uniformly
aspossible throughout the territory to be monitored. When lightning
strikes within thisterritory with sufficient energy to threaten the
grid, it is typically recorded by at leastfive detectors. In fact,
the detectors are sufficiently sensitive to locate extremely
largelightning strikes as far away as Mexico, but with less
precision.
The lightning strike generates an electromagnetic wave, which
travels through spaceat the speed of light. Each detector notes the
precise time when the wave was perceived.For this, they use a fast
oscillator (for example, a quartz crystal) that is synchronizedto
the GPS time source. The frequency of such oscillators typically
varies from 4 to 16megahertz (a megahertz is a frequency of one
million oscillations per second, abbreviatedMHz). The detectors
relay this information to a central computer as soon as they
havemeasured the wave. This system then calculates the position of
the lightning strikethrough triangulation (in other words, by using
the differences in the times at whichthe wave was observed by the
individual detectors, as explored in Exercise 2).
Identifying lightning strikes. There exist three types of
lightning strikes:
Lightning strikes between clouds. This type forms the majority
of lightning strikes.They are not detected, but they do not affect
the grid, since they do not strike theground.
Negative lightning strikes. In this case the cloud is negatively
charged, and thelightning strike consists of a flow of electrons
traveling from the cloud to the ground.
Positive lightning strikes. In this case the cloud is positively
charged, and the light-ning strike consists of a flow of electrons
traveling from the ground to the cloud. Asyou may have guessed, the
wave of a positive strike is thus the mirror image of thatof a
negative strike.
If we limit ourselves to lightning strikes between the ground
and the clouds, 90% ofsuch strikes are negative. However, during a
strong storm this percentage is reversed,and 90% of the ground
lightning strikes are positive. The detectors can
differentiatebetween a negative and a positive lightning strike:
one is the mirror image of the other.
-
14 1 Positioning on Earth and in Space
If one detector were to register a wave for a positive lightning
strike, and another wereto register a negative lightning strike, it
stands to reason that these two waves could nothave been generated
by the same strike. Unfortunately, it is a little more
complicatedthan that. A wave that has traveled more than 300 km
from its source may be reflectedby the ionosphere, inverting the
signal. Thus a detector situated far enough away mayactually be
measuring a reflected signal.
To differentiate between lightning strikes and other
electromagnetic signals, the de-tector analyzes the shape of the
wave by filtering the signal and looking for the specificsignature
of a lightning strike. In particular, the detector notes the
beginning of thesignal, the maximum amplitude, the number of peaks,
and the slope of the rise, sendingthis information to the central
computer. Signal processing is a beautiful subject ofapplied
mathematics, but we will not discuss it here.
From theory to practice. There are several additional tricks
that may be employedto correctly identify received signals.
Let P and Q be the two detectors that are the furthest apart
from each other, andlet T be the time necessary for a signal to
travel between P and Q at the speed oflight. We can be sure that
the time difference between the two detected signals forthe same
lightning strike can be no more than T . Thus, if two detectors
registereda strike at times t1 and t2 such that |t1 t2| > T ,
then these signals could not havecome from the same lightning
strike.
The amplitude of the wave generated by the lightning strike is
inversely proportionalto the square of the distance to its source.
Thus, in order for two detected signals tocorrespond to the same
lightning bolt, the amplitudes of the measured signals mustbe
compatible with the calculated location.
If lightning strikes within 20 km of a detector, the readings
from the detector areeliminated from the calculation. This is
because the measured amplitude is toolarge, and the detector is not
able to detect difference between a signal of a singlelightning
strike and a superposed signal from two lightning strikes.
With these methods Hydro-Quebec is able to locate lightning
strikes within 500 mof accuracy when they fall within the area
covered by the detectors. The accuracydiminishes for lightning
strikes outside of the covered territory.
Locating faults in the power lines. A similar method is used to
locate faults in thetransport network: for example, if a lightning
strike has damaged a power line, techni-cians need to know where to
go in order to repair it. On either end of each power lineto be
protected an oscilloperturbograph is installed, synchronized by
GPS. This devicemeasures the form of the 60 Hz signal traveling
through the power line. Dependingon the fault, there will be
different types of perturbation observed. The perturbationtravels
along the power line at the speed of light. The two detectors
measure the timest1 and t2 at which the perturbation is observed,
and using the difference t1 t2, thelocation of the fault can be
calculated. These techniques are precise only within a fewhundred
meters, but this is generally sufficient. In Quebec the power lines
are often
-
1.3 How Hydro-Quebec Manages Lightning Strikes 15
very long and traverse immense uninhabited areas; thus the
system allows for a rapiddeployment of a repair team to the area of
the fault.
Redistributing power transmission. Lightning-strike detection
can be used to de-termine the size and location of a storm. Since
lightning strikes occur in a randommanner within a territory,
statistical models can be used. For this, the territory is di-vided
into an even grid, and a spatiotemporal density of lightning
strikes is calculated.For example, a storm with two lightning
strikes per km2 within 10 minutes is verystrong. Using the
information from the model, the heart of the storm is calculated
(thestorm centroid). The calculation is repeated every five
minutes, and the displacementof the calculated centroid used to
infer the speed and direction of the storm (which canbe anywhere
from 0 to 200 km/h). This information can in turn be used to
predictwhich areas of the power grid will be affected next. One of
the more difficult problemsto be solved is that of two storms near
each other: the system must decide whetherthere are in fact two
separate storms, or a single larger storm. An interesting
challengefor engineers!
Armed with this information, the distributor draws upon his
experience to decidewhether to lower the amount of power being
transmitted over a potentially affectedpower line. Keeping a power
grid in equilibrium is a very delicate operation. Theremust always
be a balance between the amount of power being generated, the
amountof power being transmitted, and the amount of power being
used. In order to diminishthe amount of power being transmitted on
one line, there must be excess capacity onone or more other lines.
Thus, in order to make such decisions the distributor musthave a
certain margin for maneuver. Each line has a maximum capacity, but
as a rule,power grids are always operated slightly below capacity
so that the system can absorbthe loss of an entire line at any
given moment.
1.3.2 Threshold and Quality of Lightning-Strike Detection
The detector equipment is tested to meet minimum standards for
detection, but one cangenerally do better. It is thus worthwhile to
accurately gauge their actual capabilities,a process that relies
principally on statistical methods.
To this end we will draw upon an empirical law of probability
for the random variableX, giving the intensity of a lightning
strike. Rather than using the density function f(I)of lightning
strikes, we will use the distribution function
P (I) = Prob(X > I) =1
1 +(
IM
)K. (1.17)
We have that P (0) = Prob(X > 0) = 1. The values of M and K
to be used de-pend on the geographic zone and the particulars of
its environment and are determinedempirically. The value of I is
given in kA (kiloamperes). Certain values are used suf-ficiently
often to merit being given a name. Thus, the function P from (1.17)
is calledthe Popolansky function when M = 25 and K = 2. It is
called the AndersonErikson
-
16 1 Positioning on Earth and in Space
function when M = 31 and K = 2.6. Figure 1.3 represents the
Popolansky functionand Figure 1.4 represents the density function
f(I) of the associated variable X. Recallthat P (I) =
I
f(J)dJ and therefore that f(I) = P (I).
Fig. 1.3. The Popolansky function.
Fig. 1.4. The density function associated with the Popolansky
function.
We demonstrate how this empirical law can be used in
practice.
Example 1.1 The Popolansky function
1. The probability of a random lightning bolt having an amperage
greater than 50 kAis
-
1.3 How Hydro-Quebec Manages Lightning Strikes 17
P (50) =1
1 +(
5025
)2 =15
= 0.2. (1.18)
2. The median of this distribution is the value Im of I such
that
Prob(X > Im) = P (Im) =12. (1.19)
This gives us the equation 11+( Im25 )
2 = 12 . Thus 1 +(
Im25
)2= 2, or in other words
(Im25
)2= 1. Hence Im = 25.
Calculating the rate of lightning-strike detection. In practice
we do not actuallydetect all lightning strikes, but only those with
energy greater than a certain threshold.This threshold depends on
the position of the lightning strike with respect to the de-tectors
and on various sources of interference that may decrease the
reception qualityof the detectors at any given moment in time. We
will explore how to determine thepercentage of lightning strikes
that are detected. In our example we determined that50% of
lightning strikes have an amperage higher than 25 kA. Suppose for
now that ina sample of detected lightning strikes we observed that
60% had an amperage higherthan 25 kA. Let E be the event the
lightning strike is detected. Then we wish tocalculate Prob(E). We
know the probability that a detected lightning strike (in
otherwords, that event E took place) had an amperage higher than 25
kA. This is a condi-tional probability because we have assumed that
the lightning strike was detected, andit may be written as
Prob(X > 25|E) = 0.6. (1.20)On the other hand, we know that
the conditional probability of X > 25 knowing thatE has occurred
can be expressed as
Prob(X > 25|E) = Prob(X > 25 and E)Prob(E)
. (1.21)
As such we cannot do much with this expression, since both the
numerator and thedenominator are unknown. But suppose we can assume
that all lightning strikes withan amperage higher than 25 kA are
detected. Then the event X > 25 and E becomessimply X > 25,
whose probability is known. Thus (1.21) provides
Prob(E) =Prob(X > 25)
Prob(X > 25|E) =0.50.6
=56
= 0.83. (1.22)
Suppose now that for a given limited geographic region we can
assume the hypothesis(with a reasonable margin of error) that the
only lightning strikes not detected are thosethat have a weaker
amperage. We may wish to determine the threshold amperage I0below
which lightning strikes are not detected. For this calculation the
event E becomesX > I0. We have seen that Prob(E) = 56 = 0.83.
Since Prob(E) = Prob(X > I0) =P (I0), this gives the
equation
-
18 1 Positioning on Earth and in Space
P (I0) =0.50.6
=56, (1.23)
while comes to 11+( I025 )
2 = 56 , or equivalently 1 +(
I025
)2= 6
5. Hence I0 is the value
satisfying(
I025
)2= 1
5= 0.2, yielding
I0 = 25
0.2 = 11.18. (1.24)
We can therefore conclude that for the given region, the
threshold of detection is I0 =11.18 kA, and that lightning strikes
with amperages below this value are not detected.
1.3.3 Long-Term Risk Management
Managing lightning strikes is not limited to the task of
detecting and locating storms.Hydro-Quebec keeps detailed long-term
statistics that are used to construct isokeraunicmaps giving the
density of lightning strikes over a period of five years. Such a
map canthen be used to identify which zones are subject to more
risk. In the case of powerlines that have already been built, this
information can be used to decide which sectionsshould be better
protected. Similarly, such maps allow for ready identification of
routesto take during the construction of new power lines. These
choices can be rewritten in arisk-management framework.
Risks due to violent storms are but one of many risks faced by a
company thatproduces, transports, and distributes electricity.
Hence, all of the tasks of locatinglightning strikes, storm
tracking and identifying risk zones may be used as part of ageneral
risk-management framework. The problem is to make the distribution
networkas reliable as possible. Investment in the grid for this
purpose represents the cost. Thus,individual investments in the
grid have to be evaluated in terms of their profitability.The more
dangerous a given event and the larger its financial impact, the
more preparedwe are to invest in protecting the system from the
event or limiting its impact. Naturally,this is always subject to
the condition that the cost of the protection not be too high!To
formalize such a system we introduce three variables:
the probability p of the event at risk; the projected cost Ci
were the event to occur without precautions taken to mitigate
it; the cost of attenuation Ca, which is to be paid to protect
equipment and limit the
impact of the event occurring.
We introduce the indexpCiCa
. (1.25)
We see that the numerator represents the expected cost of
repairs and that the denom-inator represents the cost of
protection. We must have this ratio at least 1 in orderfor
investing in protection to be profitable. However, there are
several other factors
-
1.4 Linear Shift Registers 19
that come into play in practice. We are more likely to purchase
protection if it is validfor multiple events. Similarly, the
situation changes if the protection is only partial,meaning we
incur some reduced repair cost if the event occurs, as opposed to
beingtotal.
1.4 Linear Shift Registers and the GPS Signal
Linear shift registers allow the generation of sequences that
have excellent propertiesin terms of allowing a receiver to
synchronize with them. These simple-to-build devices(one can build
a linear shift register with a few basic electrical components)
generatepseudorandom signals. That is, they generate signals that
appear to be largely randomeven though they are generated by
deterministic algorithms.
We will construct a linear shift register that generates a
periodic signal with aperiod of 2r 1. It will have the property
that it is extremely poorly correlated with alltranslations of
itself and with other signals generated by the same register using
differentcoefficients. This property of having a signal that
correlates poorly to its translationsand other similar signals
permits GPS receivers to easily identify the signals of
individualGPS satellites and synchronize to them. The signal
produced by a linear shift registercan be imagined as a sequence of
zeros and ones. The register itself may be imagined asa ribbon of r
boxes containing the entries an1, . . . , anr, each of which holds
a value of0 or 1 (see Figure 1.5). Each box is associated with a
number qi {0, 1}. The r values
Fig. 1.5. A linear shift register.
qi are fixed and distinct for all satellites. We generate a
pseudorandom sequence in thefollowing manner:
We give ourselves a set of initial conditions a0, . . . , ar1
{0, 1}, not all zero. Given anr, . . . , an1, the register
calculates the next element in the sequence as
-
20 1 Positioning on Earth and in Space
an anrq0 + anr+1q1 + + an1qr1 =r1
i=0
anr+iqi (mod 2). (1.26)
(To calculate modulo 2 we perform the calculation as normal. The
final result is 0if the number is even, and 1 otherwise. As such we
write a 0 (mod 2) if a is even,and a 1 (mod 2) if it is odd.)
We shift each entry to the right, forgetting anr. The calculated
value an is insertedinto the leftmost box.
We iterate the above procedure.Since the above procedure is
perfectly deterministic and the number of initial conditionsis
finite, we will generate a sequence that must become periodic.
Similarly we can seethat the period of the sequence can be at most
2r, since there are only 2r distinctsequences of length r. In fact,
we can convince ourselves that if at some momentanr = = an1 = 0,
then for all m n we will have am = 0. Thus an interestingperiodic
sequence must never contain a sequence of r zeros, and will
therefore have amaximal period of 2r1. In order to generate a
sequence with interesting properties weneed only carefully choose
the coefficients q0, . . . , qr1 {0, 1} and the initial
conditionsa0, . . . , ar1 {0, 1}.
We never see the entire sequence, but rather we only observe a
window of M =2r 1 consecutive entries {an}n=m+M1n=m , which we
label B = {b1, . . . , bM}. We wishto compare it with another
window C = {c1, . . . , cM} of the form {an}n=p+M1n=p . Forexample,
sequence B is sent by the satellite, and sequence C is a cyclic
shift of the samesequence generated by the GPS receiver. To
determine the shift between the two, thereceiver shifts repeatedly
its sequence by one unit (by making p p + 1) until it isidentical
with B.
Definition 1.2 We call the correlation between two sequences B
and C of length Mthe number of entries i where bi = ci minus the
number of entries i where bi = ci. Wedenote this by Cor(B,C).
Remark: If the register consists of r entries, then the
correlation between any pairs ofsequences B and C must satisfy M
Cor(B,C) +M , where M = 2r 1. We saythat the sequences are poorly
correlated if Cor(B,C) is close to zero.
Proposition 1.3 The correlation between two sequences is given
by
Cor(B,C) =M
i=1
(1)bi(1)ci . (1.27)
Proof. The number Cor(B,C) is calculated as follows: each time
bi = ci we mustadd 1. Similarly, each time bi = ci, we must
subtract 1. Recall that bi and ci maytake on only the value 0 or 1.
Thus if bi = ci, then either (1)bi = (1)ci = 1 or(1)bi = (1)ci = 1.
In either case we see that (1)bi(1)ci = 1. Similarly, if
-
1.4 Linear Shift Registers 21
bi = ci, exactly one of (1)bi and (1)ci is equal to 1 and the
other to 1. Hence(1)bi(1)ci = 1.
The following theorem shows that we may initialize a linear
shift register in such amanner that it will generate a sequence
that is poorly correlated to every translation ofitself.
Theorem 1.4 Given a linear shift register as shown in Figure
1.5, there exist coeffi-cients q0, . . . , qr1 {0, 1} and initial
conditions a0, . . . , ar1 {0, 1} such that thesequence generated
by the register has a period of length 2r 1. Consider two win-dows
B and C of this sequence of length M = 2r 1, where B =
{an}n=m+M1n=m andC = {an}n=p+M1n=p with p > m. If M does not
divide p m, then
Cor(B,C) = 1. (1.28)
In other words, the number of bits in disagreement is always one
more than the numberof bits in agreement.
The proof of this theorem makes use of finite fields. We will
begin by walking throughan example that illustrates the theorem.
The proof will follow in Section 1.4.2.
Example 1.5 In this example we take r = 4, (q0, q1, q2, q3) =
(1, 1, 0, 0), and (a0, a1,a2, a3) = (0, 0, 0, 1). We let the reader
verify that these values generate a sequence withperiod 24 1 = 15,
repeating the following block of symbols:
0 0 0 1 0 0 1 1 0 1 0 1 1 1 1 .
If we translate the sequence to the left by one symbol, we send
the first 0 to the end,yielding
0 0 1 0 0 1 1 0 1 0 1 1 1 1 0 .
We see that the two blocks of symbols differ at positions 3, 4,
6, 8, 9, 10, 11, and 15.Thus, they differ at eight positions and
agree at seven positions, yielding a correlationof 1.
In order to calculate the correlation with the other 14
translations of the sequence weexplicitly write all possible
translations. Inspection shows that any two of the
followingsequences agree at exactly seven places and differ in the
remaining eight. We leave it tothe reader to verify this:
-
22 1 Positioning on Earth and in Space
0 0 0 1 0 0 1 1 0 1 0 1 1 1 10 0 1 0 0 1 1 0 1 0 1 1 1 1 00 1 0
0 1 1 0 1 0 1 1 1 1 0 01 0 0 1 1 0 1 0 1 1 1 1 0 0 00 0 1 1 0 1 0 1
1 1 1 0 0 0 10 1 1 0 1 0 1 1 1 1 0 0 0 1 01 1 0 1 0 1 1 1 1 0 0 0 1
0 01 0 1 0 1 1 1 1 0 0 0 1 0 0 10 1 0 1 1 1 1 0 0 0 1 0 0 1 11 0 1
1 1 1 0 0 0 1 0 0 1 1 00 1 1 1 1 0 0 0 1 0 0 1 1 0 11 1 1 1 0 0 0 1
0 0 1 1 0 1 01 1 1 0 0 0 1 0 0 1 1 0 1 0 11 1 0 0 0 1 0 0 1 1 0 1 0
1 11 0 0 0 1 0 0 1 1 0 1 0 1 1 1
In the preceding example we did not explicitly show why we chose
those specificvalues for q0, . . . , q3 and a0, . . . , a3. In
order to show this and to prove Theorem 1.4 wewill need to use the
theory of finite fields. In particular, we will need to make use
ofthe field F2r containing 2r elements. For the case r = 1 the
field F2 is the field of 2elements {0, 1} with addition and
multiplication modulo 2.
1.4.1 The Structure of the Field Fr2
The structure and construction of finite fields of order pn (for
p prime) are explored inSections 6.2 and 6.5 of Chapter 6. These
sections are self-contained and may be readwithout reading the rest
of Chapter 6. For the remainder of this chapter, we will assumethat
the reader has knowledge of