Embed Size (px)
Citation preview

Digital Object Identifier (DOI):10.1007/s00285-005-0329-3
J. Math. Biol. 52, 1–26 (2006) Mathematical Biology
Kalle Parvinen · Ulf Dieckmann · Mikko Heino
Function-valued adaptive dynamics and the calculusof variations
Received: 8 December 2004 / Revised version: 15 February 2005 /Published online: 13 July 2005 – c© Springer-Verlag 2005
Abstract. Adaptive dynamics has been widely used to study the evolution of scalar-valued,and occasionally vector-valued, strategies in ecologically realistic models. In many eco-logical situations, however, evolving strategies are best described as function-valued, andthus infinite-dimensional, traits. So far, such evolution has only been studied sporadically,mostly based on quantitative genetics models with limited ecological realism. In this articlewe show how to apply the calculus of variations to find evolutionarily singular strategiesof function-valued adaptive dynamics: such a strategy has to satisfy Euler’s equation withenvironmental feedback. We also demonstrate how second-order derivatives can be used toinvestigate whether or not a function-valued singular strategy is evolutionarily stable. Weillustrate our approach by presenting several worked examples.
1. Introduction
To date, research in theoretical evolutionary ecology has mainly focused on adap-tations in traits that can be represented by a single number, or by a small collectionof numbers. For example, the rate at which a consumer harvests a resource is a one-dimensional trait. While too low a harvesting rate will not provide the consumerpopulation with enough resources to maintain itself, too high a harvesting rate maycause the resource population to go extinct. Models have thus been devised to pre-dict the intermediate harvesting rates that are expected as evolutionary outcomesin such a system. In nature, however, consumers may have opportunities for usingmany different types of resource, and harvesting them all at an equal rate will usu-ally not be efficient. When the number of resource types is large, it will often berealistic to describe the harvesting rates of a consumer by a function defined on acontinuum of resource types. Such a harvesting strategy, traditionally referred to asa resource utilization spectrum, will thus be infinite-dimensional. It is easy to think
K. Parvinen: Department of Mathematics, 20014 University of Turku, Finland.e-mail: [email protected]
U. Dieckmann, M. Heino: Adaptive Dynamics Network, International Institute for AppliedSystems Analysis, 2361 Laxenburg, Austria.
M. Heino: Institute of Marine Research, Box 1870 Nordnes, 5817 Bergen, Norway
Mathematics Subject Classification (2000): 92D15, 49-00
Key words or phrases: Adaptive dynamics – Infinite-dimensional traits – Reaction norms– Calculus of variations – Euler’s equation

2 K. Parvinen et al.
of many other ecological settings in which considering function-valued strategiesis advantageous.
The evolution of function-valued strategies has already been studied in quan-titative genetics (Beder and Gomulkiewicz 1998; Gomulkiewicz and Beder 1996;Gomulkiewicz and Kirkpatrick 1992; Jaffrezic and Pletcher 2000; Kingsolver et al.2001). While these models are relatively realistic in terms of genetic detail, they givelittle emphasis to ecological detail. In particular, environmental feedback, whichis generally essential for understanding all but the most simple effects of naturalselection, is not yet addressed by these earlier models. By contrast, adaptive dynam-ics theory (Metz et al. 1992, 1996a; Dieckmann and Law 1996; Geritz et al. 1997,1998) has been devised as a general framework for analyzing the phenotypic evo-lutionary dynamics of populations under environmental feedback. It is only veryrecently that adaptive dynamics theory has been extended to function-valued strat-egies (Dieckmann et al. in prep), and applied to general reaction norms (Ernandeand Dieckmann 2004) and resource utilization strategies (Heino et al. in prep).
According to Dieckmann et al. (in prep), the following equation, referred to asthe canonical equation of function-valued adaptive dynamics, describes the rate ofexpected evolutionary change, d
dts, in a function-valued strategy s,
d
dts(a) = 1
2µsns
∫σ 2
s (a′, a)Gs(a′)da′, (1)
where a is the argument of the function s, µs is the mutation probability of traits, ns is the trait-dependent equilibrium population size of the evolving population,σ 2
s is the variance-covariance function of the mutation distribution, and Gs is theselection gradient (see equation 63). Equilibria of the dynamics defined by equation(1) are called evolutionarily singular strategies. These can be of different types, oneof which is an evolutionarily stable strategy (ESS; Maynard Smith 1976): a residentpopulation expressing such a strategy is evolutionarily unbeatable, in the sense thatno mutants can invade, such that evolution comes to a halt.
In this article we complement the analysis of equation (1) by applying the cal-culus of variations. To explain the idea underlying this approach, let us assume thata resident population has reached an evolutionarily stable strategy. While a mutantwith a strategy equal to that of the resident has zero fitness, any small variation inthe mutant strategy around the resident strategy will decrease fitness below zero.In other words, the evolutionarily stable function-valued trait maximizes fitness,which is given as a function of the trait. Such situations are commonly addressedin the field of mathematical optimization known as the calculus of variations. Herewe investigate how the calculus of variations can be used to find evolutionarilysingular strategies, when strategies are real-valued functions defined on an interval[amin, amax]. We demonstrate that a singular strategy has to satisfy Euler’s equationwith environmental feedback.
The methods introduced in this article have important advantages and disad-vantages relative to the direct integration of equation (1):
– Evolutionary stability. A one-dimensional singular strategy is generally eithera local fitness minimum or a maximum. If a one-dimensional strategy is an

Function-valued adaptive dynamics and the calculus of variations 3
evolutionarily attracting fitness minimum, evolutionary branching (Geritz et al.1998) is expected, resulting in a population dimorphism. A vector-valued singu-lar strategy, as well as a function-valued singular strategy, is not either a fitnessminimum or a maximum, but can be a saddle instead. The calculus of variationsoften allows us to determine whether a singular strategy is a fitness maximum,and thus an evolutionarily stable strategy.
– Convergence stability. In case of one-dimensional strategies, conditions forwhether a singular strategy is an evolutionary attractor are relatively easy toanalyze (Geritz et al. 1998). Already with two-dimensional strategies this anal-ysis becomes more complicated (Marrow et al. 1996; Leimar 2001; Meszenaet al. 2001). In the case of function-valued strategies, convergence stability isbest addressed by analyzing equation (1) and consequently is not covered here.
– Evolutionary constraints. A key advantage of using the calculus of variationsis that incorporation of some evolutionary constraints is particularly easy. Theappendix provides a detailed comparison of how one especially important typeof such constraints is handled by the two approaches.
The purpose of this paper is to illustrate in general how the calculus of variationscan be used to find and analyze evolutionarily singular function-valued strategiesof adaptive dynamics. After introducing our modeling framework in Section 2, wecontinue with presenting a sequence of five worked examples in Sections 3 to 7.These examples serve to highlight the approach’s utility and to explain in detailhow to cope with various typical complications modelers are bound to encounterin applications. The article concludes with a summary and outlook in Section 8.
2. Modeling framework
Throughout this study we focus on function-valued strategies, or infinite-dimen-sional traits of the form
s(a) ∈ R, a ∈ R, amin � a � amax. (2)
The variable a is referred to as the strategy’s determinant; [amin, amax] is thus calledthe determinant space of the function-valued trait s. The function s is assumed tobe piecewise smooth, meaning that
1. The function s is continuous on [amin, amax].2. The function s is differentiable on (amin, amax) except possibly for a finite num-
ber of points.3. The derivative s′ is piecewise continuous on (amin, amax).
2.1. Resident equilibrium
Depending on the considered population dynamics, a population comprising indi-viduals with one or more strategies s will reach a population-dynamical attractor.We consider the environmental interaction variable E that contains all essentialinformation about the environment individuals experience on such an attractor. Anecessary condition for the attractor having been reached is that the population’s

4 K. Parvinen et al.
basic reproduction ratio, given by the expected number of offspring produced byan individual, is equal to one (Diekmann et al. 1998, 2001),
R(sres, Eres) = 1. (3)
2.2. Invasion fitness of a mutant
We now consider a resident population at its population dynamical attractor, withcorresponding environmental interaction variable Eres. If a small mutant populationwith a different strategy from that of the resident appears, this mutant populationwill not initially affect the population dynamics of the resident, and the environ-mental interaction variable will remain at Eres. The mutant population size will thusinitially increase or decrease exponentially. Specifically, the mutant population willgrow, if its basic reproduction ratio
R(smut, Eres) > 1. (4)
Equivalently, the mutant population will grow, if its long-term exponential growthrate
r(smut, Eres) > 0. (5)
Either one of these quantities can be used as a measure of invasion fitness of amutant in an environment set by the resident.
Evolutionarily stable strategies (ESSs; Maynard Smith 1976) have been widelystudied in evolutionary ecology. A resident expressing such a strategy s∗ is evo-lutionarily unbeatable, since no mutants can invade the resident. By contrast, astrategy s∗ is convergence stable, and thus serves as an evolutionary attractor, if therepeated invasion and replacement of resident strategies by nearby mutant strate-gies lets the resultant sequence of resident strategies converge to s∗ (Christiansen1991). If an evolutionary attractor is also evolutionarily stable, it is called a con-tinuously stable strategy (CSS; Eshel 1983) and may be regarded as a possiblefinal outcome of the considered evolutionary process. If an evolutionary attractor isnot evolutionarily stable, disruptive selection may result in evolutionary branching(Geritz et al. 1998): an initially monomorphic population will first converge to theattractor and then divide into two phenotypic groups that subsequently will evolvefurther away from each other.
When a resident population has reached an evolutionarily stable strategy, wemay consider the fitness of mutants in the environment set by such a resident. Asno mutant can invade, all mutants necessarily have lower fitness than the resident,such that the resident strategy is a (local) fitness maximum. For finite-dimensionalstrategies s = (s1, . . . , sn), the selection gradient, i.e., the derivative of invasionfitness with respect to the components of the mutant’s strategy vector, vanishes atsuch points,
∂
∂si,mutr(smut, Eres)
∣∣∣∣smut=sres
= 0 (6)

Function-valued adaptive dynamics and the calculus of variations 5
for all i. More generally, strategies for which the selection gradient is zero, arecalled evolutionarily singular strategies (Metz et al. 1996; Geritz et al. 1998). Weare aiming at an analogous criterion for infinite-dimensional strategies.
In simple models featuring an infinite-dimensional strategy, invasion fitness canoften be written as an integral of the following type,
r(smut, Eres) =∫ amax
amin
F(a, smut(a), Eres)da, (7)
where Eres describes the environment set by the resident. We now consider a mutantwith strategy sres(a)+ε�s(a), where �s(a) is an arbitrary piecewise smooth func-tion, and |ε| is small. When sres is evolutionarily singular, the mutant’s invasionfitness r(sres + ε�s, Eres) possesses either a local minimum or a local maximumat ε = 0. This connects the notion of evolutionarily singular function-valued traitsto a standard procedure in the calculus of variations: identifying the evolutionarilysingular strategies determined by a specific fitness function is equivalent to mini-mizing or maximizing that function by variation of the underlying function-valuedstrategy. As a next step we will therefore present some salient results from the gen-eral theory of calculus of variations, including an explanation of how this method’scentral result, the so-called Euler’s equation, is derived. While the section belowprovides a general introduction to the calculus of variations, we use the same nota-tion as elsewhere in this article. An example of a textbook in which these resultsare presented in greater detail is Wan (1993).
2.3. Calculus of variations and Euler’s equation
The general problem in the calculus of variations is to minimize a function J ,
J (s) =∫ amax
amin
F(a, s(a), s′(a))da, (8)
through the variation of s, while respecting the boundary conditions s(amin) =Amin and s(amax) = Amax. The function s is assumed to be piecewise smooth.Compared to equation (7), the integrand function F is allowed to depend also ons′(a) = d
das(a). We now retain this potential dependence in the equations, but we
will also explicitly show conditions for singular strategies in the absence of thisdependence. The function F is assumed to be differentiable with respect to s and s′.Notice that in equation (7) there are no boundary conditions of the form describedabove. How free values at boundaries are handled in the calculus of variations isexplained in Section 2.3.3.
A solution of the minimization problem (8) is called an extremal. Let us assumethat the function s minimizes (8). We can then study the value of the function J
for s + ε�s, assuming that the perturbation �s is an arbitrary piecewise smoothfunction. We also assume that �s(amin) = �s(amax) = 0 to satisfy the boundaryconditions. For sufficiently small values of |ε|, we have
J (s) � J (s + ε�s). (9)

6 K. Parvinen et al.
The right-hand side thus has a local minimum at ε = 0. We therefore obtain, throughintegration by parts, and using the definitions in (12) and (13),
d
dεJ (s + ε�s)
∣∣ε=0 =
∫ amax
amin
d
dεF (a, s(a) + ε�s, s′(a) + ε�s′)da
∣∣ε=0
=∫ amax
amin
Fs(a, s(a), s′(a))�s + Fs′(a, s(a), s′(a))�s′da
=∫ amax
amin
[Fs(a, s(a), s′(a)) − d
daFs′(a, s(a), s′(a))
]�s da
+Fs′(amax, s(amax), s′(amax))�s(amax)
−Fs′(amin, s(amin), s′(amin))�s(amin)
=∫ amax
amin
[Fs(a, s(a), s′(a)) − d
daFs′(a, s(a), s′(a))
]
�s da = 0 (10)
for all possible perturbations �s. This results in the so-called Euler’s equation,which is a necessary condition for a function s to be a local minimum of (8),
d
daFs′(a, s(a), s′(a)) = Fs(a, s(a), s′(a)), (11)
where
Fs(a, s(a), s′(a)) = ∂
∂s(a)F (a, s(a), s′(a)) (12)
and
Fs′(a, s(a), s′(a)) = ∂
∂s′(a)F (a, s(a), s′(a)). (13)
Euler’s equation usually yields a differential equation for s, unless the quantityF(a, s(a), s′(a)) does not depend on s′(a).
As the function s(a) is assumed to be piecewise smooth, there can be pointswhere the derivative s′(a) is discontinuous. Such points (a, s(a)) are called corners.At corners, the so-called corner conditions of Erdmann have to be satisfied,
Fs′(a, s, s′−) = Fs′(a, s, s′
+), (14)
F − s′Fs′ is continuous at corners, (15)
where s′− is the left-side derivative and s′+ is the right-side derivative.Not all continuous functions are necessarily allowed as possible strategies. Nat-
ural constraints arise from the interpretations underlying the model in question. Forexample, in the case of s(a) describing the harvesting time invested on differentresources a, s(a) cannot be negative at any a, and the total time spent on harvesting,∫ amaxamin
s(a)da, cannot exceed the maximal time available for harvesting. Below weexplain how such constraints are incorporated into the analysis of function-valuedtraits using the calculus of variations.

Function-valued adaptive dynamics and the calculus of variations 7
2.3.1. Local inequality constraintsMany ecological variables are necessarily non-negative. Population sizes, rates,and probabilities are examples. Consequently, when such variables are consideredin connection with function-valued traits, certain inequality constraints have to besatisfied.
Problems with inequality constraints for s(a) that are local in determinant space,such as s(a) � g1(a) and s(a) � g2(a), have been widely studied in the general the-ory of the calculus of variations. If an extremal satisfies these inequality constraintswith strict inequality, such as s(a) < g1(a) and s(a) > g2(a), the extremal is saidto be an interior solution. By contrast, if an extremal satisfies one or more inequalityconstraints with equality, we say that the extremal is on the border. Euler’s equation(11) need not be satisfied on the border. The extremal can be a combination of aninterior solution and borders. Points (a, s(a)) where the extremal changes from theborder to the interior are called switching points. At switching points, the followingequation must be satisfied
F(a, s(a), s′(a)) − F(a, g(a), g′(a))
−(y′(a) − g′(a))Fy′(a, s(a), s′(a)) = 0. (16)
If Fs′s′(a, g(a), z) > 0 or Fs′s′(a, g(a), z) < 0 for all z satisfying |z − s′(a)| �|g′(a) − s′(a)|, then condition (16) reduces to s′(a) = g′(a).
2.3.2. Global equality and inequality constraintsIn some models, functions s need to satisfy equality constraints of the type
Ci(s) =∫ amax
amin
�i(a, s(a), s′(a))da = γi (17)
with i = 1, . . . , n, which involve integrals and thus apply globally in determinantspace. As in the method of Lagrange multipliers in ordinary constrained optimiza-tion, conditions (17) result in a Lagrange function
L = F − (λ1, . . . , λn)T (�1, . . . , �n), (18)
and Euler’s equation takes the form
d
daLs′(a, s(a), s′(a)) = Ls(a, s(a), s′(a)), (19)
known as the Euler-Lagrange equation. The extremal then has to satisfy equa-tion (19), and the unknown Lagrange multipliers λi are solved from (17).
Inequality constraints of the form Ci(s) � γi require equations (18) and (19)to be satisfied together with the so-called Karush-Kuhn-Tucker conditions,
{λi = 0 and Ci(s) < γi} or {λi � 0 and Ci(s) = γi}. (20)

8 K. Parvinen et al.
2.3.3. Local equality constraints and free boundary valuesIn the general problem of the calculus of variations, the boundary conditionss(amin) = Amin and s(amax) = Amax have to be satisfied. Such conditions maybe referred to as local equality constraints and often occur in problems related tophysics, e.g., when determining the shape of a chain hanging from its two endpoints.
In other problems, however, the values s(amin) or s(amax) are free. This istypically the case in ecological models. When boundary values are free, Euler’sboundary condition has to be satisfied, which is obtained from equation (10),
Fs′(amin, s(amin), s′(amin)) = 0, (21)
with an analogous condition for amax.
2.3.4. Conditions for minimalityEuler’s equation does not guarantee the minimality or maximality of an extremal.A necessary condition for a minimum is
Fs′s′(a, s(a), s′(a)) � 0 for all a ∈ [amin, amax]. (22)
The condition Fs′s′(a, s(a), s′(a)) > 0 is called the strong Legendre condition. Itis not a sufficient condition for minimality. By contrast, a sufficient condition for aglobal minimum is provided by the following theorem.
Theorem 1. If F(a, s, s′) is differentiable and convex with respect to s and s′, thenan extremal is a global minimum of (8).
2.3.5. No dependence on derivativeIn many problems related to physics, the integrand of (8) depends on both s(a)
and s′(a), especially when s(a) describes the position and s′(a) the velocity of anobject. In many ecological models, however, the integrand does not depend on s′,but instead is of the simpler form F(a, s(a)). In such cases, Euler’s equation (11)takes the form
Fs(a, s(a)) = 0, (23)
from which s can be solved implicitly.Euler’s equation (23) has to be satisfied also at the boundaries amin and amax. As
a result, no fixed boundary conditions of the form s(amin) = Amin, s(max) = Amaxcan be satisfied in general. This is not a problem, because in ecological mod-els the boundary values are typically free, and Euler’s boundary conditions (21)Fs′(amin, s(amin), s
′(amin)) = 0 and the analogous condition for amax are automat-ically satisfied, because Fs′ = 0.
When there are local inequality constraints for the function s(a), the extremalconsists of the corresponding borders together with an interior solution satisfying(23). Since Fs′ = 0, the condition (16) becomes F(a, s(a)) = F(a, g(a)), which issatisfied, because the function s is assumed to be continuous. The extremal is thusa continuous curve, consisting of the interior solution together with the borders.
Concerning corners, the first corner condition (14) of Erdmann is automaticallysatisfied, and the second corner condition (15) is satisfied since s is assumed to becontinuous.

Function-valued adaptive dynamics and the calculus of variations 9
2.4. Applying the calculus of variations to ecological models
Based on the above considerations, we now assume that the invasion fitness of amutant in an environment set by the resident can be written as
r(smut, Eres) =∫ amax
amin
F(a, smut(a), s′mut(a), Eres)da. (24)
In most ecological models, finding a function-valued evolutionarily singular strat-egy requires more than merely applying the calculus of variations. The reason isthat the integrand F usually depends also on the environment set by the resident.We therefore have to analyze the following fixed-point problem: find a residentstrategy s with resulting environment E such that s solves the problem of calcu-lus of variations given by (24) for E. In short, a singular strategy satisfies Euler’sequation with environmental feedback,
{r(s, E) = 0dda
Fs′(a, s(a), s′(a), E) = Fs(a, s(a), s′(a), E).(25)
In contrast to the infinite-dimensional strategy s, the dimension of the envi-ronmental variable E is usually finite, and frequently small. It is therefore ofteneasier to find evolutionarily singular strategies in the following way: find the envi-ronmental variable E for which the resulting extremal strategy s begets the sameenvironmental variable E.
Only in very simple ecological models with frequency-independent selection,environmental feedback is absent, such that finding evolutionarily singular strate-gies is a direct optimization problem. Such a simple situation is addressed in theexample considered in the following section. After that we will present four otherexamples of increasing ecological complexity, to illustrate the use of various toolsderived from the calculus of variations.
3. First example: Frequency-independent selection
As a first example, we will study a model in which finding the evolutionarily sin-gular strategy reduces to a direct optimization problem. This simplification applieswhenever the strategy giving a mutant maximum fitness is the same in all environ-ments potentially set by the resident.
For coherence’s sake, all examples in this article address the evolution of met-abolic investment strategies, by extending a model introduced by Dieckmann et al.(in prep).
3.1. Model description
We consider consumers that can feed on a variety of resources. In general, the utili-zation of different resources requires prior physiological or morphological invest-ments into handling and processing. Such investments are expected to be costly.How should a consumer allocate these metabolic investments across the range ofdifferent resources?

10 K. Parvinen et al.
Let 0 � a � 1 characterize the digestibility of the different types of resource,with the value a = 0 corresponding to highest digestibility. Values s(a) of the func-tion-valued trait s now describe the metabolic effort invested on different resourcetypes a. This investment is necessarily non-negative: s(a) � 0 for all a. With met-abolic effort s(a), the gain obtained from consuming one resource unit of type a isassumed to equal
e(a, s(a)) = s(a)
s(a) + a. (26)
This quantity is called the metabolic efficiency, and ensures that there is diminish-ing return of metabolic investment. If the density of resource type a is n(a), theconsumer’s total gain is
T (s, n) =∫ 1
0n(a)e(a, s(a))da. (27)
Without constraints, evolution of the function-valued strategy s would cause meta-bolic effort s(a) to approach infinity for all types of resources a �= 0. However, asinvestment is costly, the total investment
S(s) =∫ 1
0s(a)da (28)
must necessarily be limited. To reflect this, we assume that increasing total invest-ment is costly, decreasing the consumer’s growth rate. Specifically, we assume thatconsumers with trait s, experiencing resource densities n and a total consumerpopulation size of N , have a per capita growth rate of
r(s, N) = T (s, n) − cS(s) − N
K
=∫ 1
0
[n(a)
s(a)
s(a) + a− cs(a) − N
K
]da, (29)
where K is the consumer’s carrying capacity, and c is a constant measuring thecost of metabolic investment. To keep this first example simple, we assume that theavailability of resource types, described by n, remains unaffected by the consumer,even though this is not always realistic in nature.
3.2. Invasion fitness
For a given resident strategy sres, the equilibrium condition r(sres, Nres) = 0 resultsin Nres = K(T (sres, n) − cS(sres)), if T (sres, n) − cS(sres) � 0, and in Nres = 0otherwise. We can then consider a small mutant population with strategy smut. Themutant’s invasion fitness is given by
r(smut, Nres) =∫ 1
0F(a, smut(a), Nres)da
=∫ 1
0
[n(a)
smut(a)
smut(a) + a− csmut(a) − Nres
K
]da, (30)

Function-valued adaptive dynamics and the calculus of variations 11
where the environment set by the resident is characterized by the resident’s popu-lation size, Eres = Nres.
3.3. Analysis based on the calculus of variations
We can use the calculus of variations to identify the models’ evolutionarily singularstrategies. According to (30), Euler’s equation (23) becomes
Fs(a, s(a), N) = n(a)a
(s(a) + a)2 − c = 0. (31)
In general, we would now have to find a strategy s, whose equilibrium popu-lation size is N , and which satisfies Euler’s equation for N , Fs(a, s(a), N) = 0.In this first example, however, we notice that equation (31) does not depend onpopulation size N . The problem of finding evolutionarily singular strategies is thusa direct optimization problem. This does not come as a surprise, because the envi-ronment that the mutant experiences depends only on the one-dimensional variableN , the resident’s population size. In such a case, evolution proceeds according toan optimization principle (Metz et al. 1996b; Heino et al. 1998), and selection issaid to be frequency-independent.
We can thus obtain the evolutionarily singular strategy directly from solvingequation (31). Any solution must, however, be non-negative. Wherever the strategysatisfying (31) is negative, the correct solution follows the border s(a) = 0. Thesought evolutionarily singular strategy is therefore given by
s(a) ={√
n(a)ac
− a if n(a) � ac
0 otherwise,(32)
recovering an earlier result obtained by Dieckmann et al. (in prep). Note that in thiscase, according to equation (63), the selection gradient Gs(a) = Fs(a, s(a), N) =0. Therefore the singular strategy given by (32) is an equilibrium of the canonicalequation (1).
The calculus of variations allows us to prove that the singular strategy (32) isevolutionarily stable. The second derivative
Fss(a, s(a), N) = − 2n(a)a
(s(a) + a)3 � 0, (33)
is non-positive. Together with Fss′ = Fs′s′ = 0 this means that the functionF(a, s(a), N) is concave with respect to s(a) and s′(a). According to Theorem 1,the evolutionarily singular strategy thus is a global maximum of r(s, N), and istherefore evolutionarily stable.
3.4. Illustrations
Figure 1b shows an example of an evolutionarily stable investment strategy s∗. Forthe purpose of this illustration, we have assumed that the resource densities aregiven by

12 K. Parvinen et al.
Fig. 1. (a) Resource densities n(a) according to equation (34). (b) Evolutionarily stable met-abolic investment strategy s∗ in the first example, according to equation (32). Parameters:c = 0.5
n(a) = 4a(1 − a), (34)
shown in figure 1a. Figure 1b shows that, above the threshold value a = 1 − c/4 =0.875, resources are too indigestible (large a) and rare (low n(a)) for any metaboliceffort to be invested.
4. Second example: Global inequality constraints
The second example illustrates how global inequality constraints on function-val-ued traits are handled through the calculus of variations.
4.1. Model description and invasion fitness
As mentioned earlier, total investment S(s) in the metabolic investment model isnecessarily limited. In the first example above, this limitation was incorporatedby assuming a cost of total metabolic investment in terms of reduced populationgrowth rate. In our second example we proceed differently, by removing this costfrom the model’s invasion fitness,
r(smut, Nres) =∫ 1
0F(a, smut(a), Nres)da
=∫ 1
0
[n(a)
smut(a)
smut(a) + a− Nres
K
]da, (35)
while considering the global inequality constraint S(s) � C. The environment setby the resident is again characterized by the resident’s population size, Eres = Nres.
4.2. Analysis based on the calculus of variations
As explained in Section 2.3.2, an inequality constraint can be reflected by con-sidering a Lagrange function, L = n(a)
smut(a)smut(a)+a
− NresK
− λsmut(a), in Euler’sequation (19),
Ls(a, s(a), N) = n(a)a
(s(a) + a)2 − λ = 0. (36)

Function-valued adaptive dynamics and the calculus of variations 13
In addition, the Karush-Kuhn-Tucker conditions (20) have to be satisfied. Again,the equation (36) does not depend on the resident population size, and finding thesingular strategies is a direct optimization problem.
For λ = 0, equation (36) cannot be satisfied, unless there are no resources atall, n(a) = 0 for all a �= 0. Since we are not interested in this trivial case, theinequality constraint S(s) � C is always satisfied with equality S(s) = C. Thiscondition results in (32), where the model parameter c is replaced by the Lagrangemultiplier λ. The value of λ can be found numerically from S(s) = C.
As in the first example, the selection gradient Gs(a) = Fs(a, s(a), N). How-ever, Gs(a) = 0 only if n(a)a = 0. We can include an equality constraint S(s) = C
into the canonical equation by using the variance-covariance function σ 2s (a′, a) =
δ(a − a′) − 1 given by equation (68) with A(a) = 1. The equilibrium condition ofthe canonical equation d
dts(a) = 0 results then in a similar condition as (36).
4.3. Illustrations
Some illustrations are shown in Figure 2a.
5. Third example: Dependence of fitness on a trait’s derivative
The third example shows how to address evolutionary problems in which invasionfitness depends on a function-valued trait’s derivative s′(a) = d
das(a), in addition
to the dependence on the trait s(a) itself.
5.1. Model description and invasion fitness
In conjunction with assuming that metabolic investment itself is costly, it is inter-esting to explore situations in which physiological mechanisms that accuratelyseparate the investment between two similar resource types are also costly. In otherwords, in addition to the direct costs of metabolic investment, there may be a cost
Fig. 2. (a) Evolutionarily stable metabolic investment strategies s∗ in the second example,with global inequality constraint S(s) � C, for different values of C. The value C = 0.1corresponds to λ = 1.05617, C = 0.2 to λ = 0.681346, and C = 0.294351 to λ = 0.5.The result for the latter case is thus identical to that in Figure 1b. (b) Evolutionarily stablemetabolic investment strategies s∗ in the third example, for different plasticity costs δ. Thedashed curve corresponds to the case without plasticity costs, δ = 0. Parameters: c = 0.5

14 K. Parvinen et al.
of plasticity. The derivative s′ describes how plastic a strategy s is. We assumethat the cost of plasticity increases with the absolute value of s′(a), and choose thefunction (s′(a))2 to describe this dependence. Assuming that the cost of plasticityreduces the growth rate r , we obtain the following invasion fitness,
r(smut, Nres) =∫ 1
0F(a, smut(a), s′
mut(a), Nres)da
=∫ 1
0
[n(a)
smut(a)
smut(a) + a−csmut(a) − δ(s′
mut(a))2 − Nres
K
]da, (37)
with δ � 0 scaling the cost of plasticity. For simplicity, we again use the assumptionthat n remains constant. For δ = 0, the model above is identical to that in the firstexample.
5.2. Analysis based on the calculus of variations
Since Fs′ = −2δs′(a), Euler’s equation (11) becomes
d
daFs′ = −2δs′′(a) = n(a)a
(s(a) + a)2 − c = Fs. (38)
Again, finding the singular strategies is a direct optimization problem. As the re-source density n can be an arbitrary function, we are not able, in general, to solvethis differential equation analytically. Numerical solution is, however, possible.
Since the strategy’s boundary values s(0) and s(1) are not prescribed, we obtainthe two necessary conditions for determining the constants of the solution of (38)from Euler’s boundary condition (21): Fs′(0, s(0), s′(0)) = −2δs′(0) = 0, result-ing in s′(0) = 0 and, analogously, in s′(1) = 0. If the extremal consisted of an inte-rior solution satisfying (38) together with a border solution s(a) = 0 = g(a), abut-ting at a∗, the switching point condition (16) would reduce to s′(a∗) = g′(a∗) = 0,because Fs′s′ = −2δ < 0. From equation (33) we obtain Fss � 0, and sinceFss′ = 0 and Fs′s′ = −2δ < 0, the function F is concave with respect to s and s′.According to Theorem 1,any singular strategy is therefore evolutionarily stable.
In the third example, the fitness gradient Gs(a) = Fs(a, s(a), s′(a)) − dda
Fs′(a, s(a), s′(a)). The condition Gs(a) = 0 of the canonical equation approach thusresults in the same condition as the calculus of variations approach (38).
5.3. Illustrations
We have solved equation (38) for different values of δ, using numerical methods forthe solution of ordinary differential equations. The resulting evolutionarily stableinvestment strategies s∗ are shown in figure 2b. These results demonstrate how,starting from the cost-free case indicated by the dashed curve, increasing the costparameter δ causes the evolutionarily stable strategy s∗ to become more and moreuniform.

Function-valued adaptive dynamics and the calculus of variations 15
6. Fourth example: Frequency-dependent selection
The previous examples were deliberately kept rather simplistic in that selectionremained frequency-independent. Our fourth example now shows how to analyzefunction-valued traits exposed to frequency-dependent selection.
6.1. Model description
To enhance the ecological realism of our metabolic investment model, we assumethat the resource densities n respond to consumption according to the followingdifferential equation,
d
dtn(a) =
(1 − n(a)
k(a)
)n(a) − γ n(a)Ne(a, s(a)), (39)
where k(a) is the density the resource of type a would attain in the absence ofconsumers, and the parameter γ � 0 is the consumer’s per capita harvesting rate.The intensity with which a consumer with strategy s harvests resources of type a isassumed to be proportional to its metabolic efficiency e(a, s(a)). For simplicity, weassume that the resource population grows much faster than the consumer popula-tion, and is thus always at an equilibrium that can be determined from d
dtn(a) = 0,
n∗(a, N, s(a)) ={
k(a)(1 − γNe(a, s(a))) if 1 − γNe(a, s(a)) > 00 otherwise.
(40)
For γ → 0, corresponding to consumers that affect their resources only veryweakly, this results in n∗(a) = k(a), such that we recover the simpler model con-sidered in the first example as a special case.
6.2. Invasion fitness
In this example, the environment mutants experience is characterized by both theresident’s population size Nres and the resource density n∗(a, Nres, sres(a)). Thismeans that this environment is no longer one-dimensional, and selection thereforeis frequency-dependent.Analogously to equation (30), the mutant’s invasion fitnessis given by
r(smut, Nres, sres) =∫ 1
0F(a, smut(a), n∗(a, Nres, sres(a)), Nres)da
=∫ 1
0
[n∗(a, Nres, sres(a))
smut(a)
smut(a) + a− csmut(a) − Nres
K
]da. (41)

16 K. Parvinen et al.
6.3. Analysis based on the calculus of variations
Euler’s equation for this example has the same form as in the frequency-indepen-dent case, equation (31), with the difference that the resource densities are not fixed,but are now obtained from equation (40). In order to find the evolutionarily singu-lar strategy for this example, we must find a strategy s, for which the consumer’sequilibrium population size is N , and resource densities are n∗(a, N, s(a)). Thisstrategy s must satisfy Euler’s equation (31) in the environment N , n∗(a, N, s(a)).
In practice, however, it is much easier to (i) choose a particular population sizeN , (ii) obtain the corresponding resource densities and extremal strategy from solv-ing the equations (32) and (40), and (iii) vary N until r(s, N, s) = 0 is satisfied.We used numerical methods to accomplish this task.
As in the frequency-independent case in the first example, we obtain for thesecond derivative Fss � 0. Since Fss′ = Fs′s′ = 0, the function F is concave withrespect to ss′. According to Theorem 1, once an evolutionarily singular strategy isidentified, it is necessarily evolutionarily stable.
In the fourth example, the fitness gradient Gs(a) = Fs(a, s(a), n∗(a, N, s(a)),
N). Again, the condition Gs(a) = 0 of the canonical equation approach results inthe same conditions as the calculus of variations approach.
6.4. Illustrations
Figure 3 shows the different evolutionarily stable strategies resulting for differentvalues of the harvesting rate γ . We have again chosen k(a) = 4a(1 − a), so thatin the absence of consumers, or for γ → 0, the resource densities are identicalto those in the frequency-independent case. Our numerical results illustrate howincreasing γ causes metabolic investment to become less beneficial.
7. Fifth example: Complex fitness functions
In all previous examples, the fitness of a mutant could be written as a single integralof the form shown in equation (7). This is not always the case. To illustrate howto use the calculus of variations for analyzing models with more complex fitnessfunctions, our fifth example extends the metabolic investment model to a meta-population setting. The resultant selection is frequency-dependent. We have thus
Fig. 3. Evolutionarily stable metabolic investment strategies s∗ in the fourth example, forγ = 0, γ = 0.5, and γ = 1. For γ = 0, selection becomes frequency-independent, andthe evolutionarily singular strategy coincides with that in figure 1b. Parameters: c = 0.5,K = 10.

Function-valued adaptive dynamics and the calculus of variations 17
frequency-independent selection in the first three examples, and frequency-depen-dent selection in the last two.
7.1. Model description
A metapopulation consists of local populations living in different habitat patches(Levins 1969, 1970). Here we consider M such patches. In patch i = 1, . . . , M ,the density of resources of type a is ni(a). For simplicity, we again assume that theresource densities ni(a) are unaffected by the consumer.
In each patch, consumer populations grow according to the same birth and deathprocesses considered in the first example. In addition, dispersal between patchesoccurs with per capita emigration rate m, so that population dynamics in the differ-ent patches are coupled. Emigrants survive dispersal with probability p. Survivedemigrants choose the patch into which they immigrate randomly, independentlyof the patch properties. Therefore, the probability to immigrate into patch i is 1
M.
It is thus possible that an emigrant immigrates into the same patch it left from.As a result, the population size Ni in patch i changes according to the followingdifferential equation,
dNi
dt= gi(s, Ni)Ni − mNi + pNm, (42)
where N = 1M
∑Mi=1 Ni is the average population size across patches. The local
population growth rate in patch i is given by
gi(s, Ni) =∫ 1
0F i(a, s(a), Ni)da
=∫ 1
0
[ni(a)
s(a)
s(a) + a− cs(a) − Ni
Ki
]da. (43)
7.2. Invasion fitness
The differential equation (42) can be written in matrix form,
d
dtN = A(s, N)N,
Aii = gi(s, Ni) − m + pm
M,
Aij = pm
M, if i �= j. (44)
We now assume that a resident population with strategy sres has reached its popula-tion-dynamical equilibrium Nres = (N1,res, N2,res, . . . , NM,res). Therefore, a smallmutant population with strategy smut will initially grow or decrease according tothe linear differential equation d
dtNmut = A(smut, Nres)Nmut. The mutant’s invasion
fitness is given by the dominant eigenvalue of the matrix A(smut, Nres), which isthe long-term exponential growth rate of the mutant in the environment set by theresident.

18 K. Parvinen et al.
However, in this example it is more practical to use, instead, the basic reproduc-tion ratio R as a measure of invasion fitness. This quantity describes the expectednumber of offspring produced by an individual during its entire life. In a meta-population setting, the basic reproduction ratio can be determined as the expectednumber of immigrant mutants produced by an immigrating mutant during its entirelife (Gyllenberg and Metz 2001; Metz and Gyllenberg 2001).
When a mutant arrives in patch i, it encounters a resident population of sizeNi,res. Initially, the mutant population is rare, and therefore does not affect the pop-ulation dynamics of the resident. Consequently, the mutant population will growaccording to the differential equation
d
dtNi,mut = Ni,mut
[gi(smut, Ni,res) − m
]. (45)
This means that the mutant’s population size at time τ after arrival of the initialmutant population of size Ni,mut(0) will equal
Ni,mut(τ ) = Ni,mut(0)e[gi(smut,Ni,res)−m]τ . (46)
This mutant population will produce mutant emigrants at rate mNi,mut(τ ). There-fore, the expected number of immigrants produced by a mutant with strategy smutthat has immigrated into habitat patch i is
Ri,mut(smut, Ni,res) = p
∫ ∞
0m
Ni,mut(τ )
Ni,mut(0)dτ = p
∫ ∞
0me[gi(smut,Ni,res)−m]τ dτ
={ pm
m−gi(smut,Ni,res)if m − gi(smut, Ni,res) > 0
∞ otherwise.(47)
An immigrating mutant has a probability of 1/M to immigrate into patch i. Analo-gously to Parvinen (2002), we obtain the expected number of immigrants producedby an immigrating mutant as
Rmut(smut, Nres) = 1
M
M∑i=1
Ri,mut(smut, Ni,res). (48)
Notice that the environment set by the resident is now M-dimensional, Eres = Nres,and selection is therefore frequency-dependent for M > 1.
At population-dynamical equilibrium, the resident populations are stationary inall patches, dNi
dt= 0 for all i = 1, . . . , M . From equation (42) we obtain
m − gi(sres, Ni,res) = pmN res
Ni,res> 0, (49)
and therefore
Rmut(sres, Nres) = 1
M
M∑i=1
pm
m − gi(sres, Ni,res)= 1
M
M∑i=1
Ni,res
N res= 1. (50)
This confirms that, at population-dynamical equilibrium, each resident individualexactly replaces itself, as consistency requires.

Function-valued adaptive dynamics and the calculus of variations 19
7.3. Analysis based on the calculus of variations
In the previous examples, we could use the calculus of variations directly to findevolutionarily singular strategies. In the metapopulation model the situation is morecomplex. In equation (43), the local growth rates gi in patches i are expressed asintegrals of the form shown in equation (7).Yet, the fitness measure in equation (48)is a function of these growth rates gi , and cannot be expressed as one integral ofthe form shown in equation (7). This means that we cannot apply the calculus ofvariations in its usual form. However, we can find candidate singular strategies bya method that is similar to that for deriving Euler’s equation (11).
We assume that a given resident strategy sres is an evolutionarily singular strat-egy, which means that it is a local minimum or maximum of the fitness measureRmut(smut, Nres). Therefore, the fitness of a mutant with function-valued strategysmut = sres+ε�s, Rmut(sres+ε�s, Nres), will be at a local maximum or a minimumfor ε = 0. This implies
d
dεRmut(sres + ε�s, Nres)
∣∣ε=0 = 0 (51)
for all possible perturbation functions �s. We can calculate this derivative by firstobtaining the corresponding derivative of d
dεRi,mut,
d
dεRi,mut(sres + ε�s, Ni,res) = pm d
dεgi(sres + ε�s, Ni,res)
[m − gi(sres + ε�s, Ni,res)]2 , (52)
for which we need the derivative ddε
gi according to equation (43),
d
dεgi(sres + ε�s, Ni,res) =
∫ 1
0F i
s (a, sres(a) + ε�s(a), Ni,res)�s(a)da, (53)
so that we obtain, by combining equations (49), (52), and (53),
d
dεRi,mut(sres + ε�s, Ni,res)
∣∣ε=0 = 1
pm
(Ni,res
N res
)2 ∫ 1
0F i
s (a, sres(a))�s(a)da.
(54)
Using equation (48), we thus obtain
d
dεRmut(sres + ε�s, Nres)
∣∣ε=0 = 1
Mpm
∫ 1
0
(M∑i=1
(Ni,res
N res
)2
F is (a, sres(a))
)
�s(a)da. (55)
According to (51), this derivative has to be zero for all possible perturbation func-tions �s, which implies
M∑i=1
(Ni,res
N res
)2
F is (a, sres(a), Ni,res) = 0. (56)

20 K. Parvinen et al.
This means that an evolutionarily singular strategy sres in the metapopulation modelhas to satisfy
M∑i=1
(Ni,res
N res
)2 (ni(a)a
(sres(a) + a)2 − c
)= 0, (57)
from which we obtain the solutions s∗,
s∗(a) ={√
n(a, Nres)ac
− a, if n(a, Nres) � ac
0 otherwise,(58)
with
n(a, Nres) =∑M
i=1
(Ni,res/N res
)2ni(a)∑M
i=1
(Ni,res/N res
)2 . (59)
The remaining unknowns Nres = (N1,res, N2,res, . . . , NM,res) in (58) are deter-mined from setting d
dtNi,res = 0 in equation (42).As a result, we have Rmut(s
∗, Nres)
= 1.If the second derivative of invasion fitness with respect to the mutant’s strategy
is negative for all perturbation functions �s,
d2
dε2 Rmut(sres + ε�s, Nres)∣∣ε=0 < 0, (60)
the evolutionarily singular strategy sres is a local fitness maximum, and thus evolu-tionarily stable. Using the same technique as above, we obtain
d2
dε2 Rmut(sres + ε�s, Nres)∣∣ε=0 = 1
Mp2m2
M∑i=1
(Ni,res
N res
)3
[∫ 1
0
pmN res
Ni,resF i
ss(a, sres(a))(�s(a))2da
+2
(∫ 1
0F i
s (a, sres(a))�s(a)da
)2]
. (61)
The first term in the square brackets is negative because, according to equation (33),we have F i
ss(a, sres(a)) � 0. Since the second term is positive, it is difficult to deter-mine the second derivative’s sign in general. Yet we can conclude that for smalldispersal rates m the second term dominates relative to the first, which means thatthe second derivative is positive. By contrast, for large values of m the first termdominates. Therefore, for small dispersal rates, evolutionary branching may bepossible, whereas for large dispersal rates, the singular strategy is expected to beevolutionarily stable.
In the fifth example, the left-hand side of equation (55) is the fitness gradientGs(a) when we choose �s = δa . The condition Gs(a) = 0 of the canonical equa-tion approach thus results in the same condition (56) as the calculus of variationsapproach.

Function-valued adaptive dynamics and the calculus of variations 21
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
Resource digestibility, a
Res
ourc
ede
nsity
,n(a
)
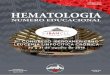
Fig. 4. Resource densities ni(a) according to equation (62)
7.4. Illustrations
To illustrate evolutionarily singular strategies in the fifth example, we use the fol-lowing functions for describing the resource densities in patch i,
ni(a) = 4a(1 − a)
1 + 2(a − ai )2 , i = 1, 2, with a1 = 0.1 and a2 = 0.9, (62)
which result in skewed resource density distributions as illustrated in figure 4.Numerical solutions for the resulting evolutionarily singular strategies s∗ are
shown in figure 5, which depicts different evolutionarily stable monomorphic anddimorphic solutions for a two-patch metapopulation, M = 2. For comparison, wealso display the locally optimal metabolic investment strategies in the two patchesas dashed curves. For sufficiently small values of the dispersal rate m, the mono-morphic singular strategy is not evolutionarily stable, and a protected dimorphismof two strategies is possible (Figure 5a-c). For very small values of m, the twocoexisting strategies essentially are complete specialists, each adapted to one ofthe two patches (Figure 5a). When the dispersal rate m is increased, these strategiesconverge (Figure 5bc). When the dispersal rate is increased further, coexistence ofthe two strategies is no longer possible: instead a monomorphic generalist strategybecomes evolutionarily stable (Figure 5d). Notice that the stable coexistence ofthree or more strategies is excluded, since the number of patches serves as an upperlimit to the number of stably coexisting strategies (Parvinen, in prep.).
Figure 6 illustrates how parameters in the metapopulation model affect thepotential for the emergence of an evolutionarily stable dimorphism of metabolicinvestment strategies. The figure demonstrates that the evolutionary effect of in-creased dispersal rate m shown in figure 5 applies more generally. For small valuesof m, the two specialist strategies can always coexist. When m is increased, dimor-phic coexistence becomes impossible, and instead a monomorphically singularstrategy becomes evolutionarily stable. The critical value of m at which this changefrom dimorphism to monomorphism occurs, varies with the carrying capacity K2.For intermediate values of K2, the two patches are more balanced, and coexis-tence remains possible for higher dispersal rates m. For smaller or larger values ofK2, either one of the two patches dominates, and coexistence is possible only forlower dispersal rates. Note that patch 1 has better resource distribution than patch2, and therefore the value of K2 for which patches are most balanced is larger than

22 K. Parvinen et al.
Fig. 5. Evolutionary outcomes for the metapopulation model considered in the fifth exam-ple. (a-c) For low dispersal rates, the monomorphically evolutionarily singular strategy isnot evolutionarily stable, enabling coexistence of two dimorphically singular strategies. (d)For high dispersal rates, the monomorphically singular strategy is evolutionarily stable, anda dimorphism does not evolve. Optimal investment strategies in the two patches are shownas dashed curves. Parameters: p = 0.95, c = 0.5, K1 = 10, K2 = 16
Fig. 6. Dependence of evolutionary outcomes in the fifth example on carrying capacity K2
and dispersal rate m. Parameter combinations enabling the evolutionarily stable coexistenceof two strategies are shown in dark grey, while combinations resulting in a monomorphicevolutionarily stable strategy are shown in light grey. Parameters: p = 0.95, c = 0.5,K1 = 10
K1 = 10. Balanced patches have been shown before to support the coexistence ofscalar-valued strategies in metapopulation models (Parvinen 2002).
8. Discussion
In this article we have introduced a general approach to using the calculus of varia-tions for finding and analyzing evolutionarily singular function-valued strategies ofadaptive dynamics. While previous work focused on the canonical equation of func-tion-valued adaptive dynamics (Dieckmann et al. in prep; Ernande and Dieckmann2004; Ernande et al. 2004; Heino et al. in prep), the general result derived hereshows that an evolutionarily singular strategy has to satisfy Euler’s equation withenvironmental feedback. The resultant two alternative approaches to function-val-ued adaptive dynamics constructively complement each other:

Function-valued adaptive dynamics and the calculus of variations 23
– As demonstrated by equations (10) and (63), Euler’s equation is satisfied if andonly if a function-valued strategy causes the corresponding selection gradientto vanish. Therefore, analyses based, alternatively, on the calculus of variationsor the canonical equation of adaptive dynamics result in the same predictionsfor evolutionarily singular strategies, provided there are no constraints on whichstrategies can be realized. This is the case in our first, third and fourth example.Also in our fifth example with complex fitness functions we obtain the sameconditions for singular strategies.
– In the canonical equation, evolutionary constraints are expressed via the var-iance-covariance function of a strategy’s mutation distribution. Although thisperspective is essential for correctly describing the expected transient dynamicsof a function-valued trait, it makes it relatively difficult to derive evolutionaryoutcomes. By contrast, as we have showed above and in the appendix, incor-porating several standard types of evolutionary constraints into the calculus ofvariations is easy.Also in our second example, which included a global inequalityconstraint, the same singular strategies are obtained from the two approaches.
– The calculus of variations also helps in evaluating the second-order conditionsthat determine the evolutionary stability of singular strategies.
– The canonical equation, on the other hand, can be used in situations in which thecalculus of variations is not applicable, especially since the canonical equationallows considering variance-covariance constraints of arbitrary form.
– The calculus of variations cannot be used to evaluate the convergence stability ofan evolutionarily singular strategy, which determines whether or not such a strat-egy serves as an evolutionary attractor. Also for describing transient evolutionarydynamics, the canonical equation is needed.
We have presented several worked examples to illustrate the various meth-ods presented in this article. All examples addressed the evolution of a metabolicinvestment strategy, in a variety of different ecological settings. In the first example(Section 3), ecological conditions were so simple that no environmental variablesappeared in Euler’s equation. This is characteristic of models without frequency-dependent selection: finding evolutionarily singular strategies in such models thusis a direct optimization problem, without the need to consider environmental feed-back. The second example (Section 4) served to illustrate the treatment of globalinequality constraints, which may be used to reflect costs involved in the expres-sion of function-valued traits. The third example (Section 5) explained how toaddress problems in which fitness depends not only on strategy values s(a) butalso on a strategy’s derivative s′(a) = d
das(a). Whereas in the first three examples
selection was frequency-independent, the fourth example (Section 6) illustrated thetreatment of frequency-dependent selection, which naturally occurs in virtually allecological models with realistic environmental feedback. Also in the fifth example(Section 7) selection was frequency-dependent: the analysis of a metapopulationmodel showed how to deal with models in which fitness cannot be expressed as asingle integral. This example also featured an evolutionarily stable dimorphism ina function-valued strategy.

24 K. Parvinen et al.
Together with Dieckmann et al. (in prep), this article provides a systematicframework for studying the adaptive dynamics of function-valued traits. Concreteapplications of this framework are presented by Ernande and Dieckmann (2004);Ernande et al. (2004) and Heino et al. (in prep). We hope that the new tools intro-duced here will help to raise the profile of function-valued traits in theoreticalevolutionary ecology, and result in interesting applications in the future.
Acknowledgements. This research has been supported by the European Research TrainingNetwork ModLife (Modern Life-History Theory and its Application to the Management ofNatural Resources), funded through the Human Potential Programme of the European Com-mission (Contract HPRN-CT-2000-00051). UD gratefully acknowledges financial supportby the Austrian Science Fund and by the Austrian Federal Ministry of Education, Science,and Cultural Affairs.
Appendix: Calculus of variations and the canonical equation
According to Dieckmann et al. (in prep), the expected dynamics of a function-val-ued trait can be described by the so-called canonical equation of function-valuedadaptive dynamics, equation (1). For evolutionarily singular strategies, the selectiongradient Gs(a) = d
dεJ (s + εδa)
∣∣ε=0 is zero for all a. Below we consider functions
J of type J (s) = ∫ amaxamin
F(a, s(a), s′(a))da as in equation (8).When we compare the selection gradient with equation (10), we see that the
latter gives the selection gradient at a if we choose the considered perturbancefunction to equal a Dirac delta function peaked at a, �s = δa . Equation (10) thenreduces to
Gs(a) = d
dεJ (s + εδa)
∣∣ε=0 = Fs(a, s(a), s′(a)) − d
daFs′(a, s(a), s′(a)).(63)
This implies that the selection gradient vanishes if and only if Euler’s equation(11) is satisfied. In this sense, the alternative methods for identifying evolutionarilysingular strategies, by using the calculus of variations or the canonical equation,are equivalent.
However, some differences between these two methods arise for constrainedevolution. Sections 2.3.1 to 2.3.3 described how to reflect several standard evo-lutionary constraints in the calculus of variations. Yet, the mutation structure ofa function-valued strategy might impose constraints that cannot be represented interms of local or global constraints of the form considered in these sections. Inthe approach of Dieckmann et al. (in prep), such restrictions are incorporated intothe canonical equation via a function-valued trait’s mutational variance-covariancefunction.
A global equality constraint of the form
C(s) =∫ amax
amin
�(a, s(a))da = γ. (64)

Function-valued adaptive dynamics and the calculus of variations 25
is readily transformed into a mutational variance-covariance function that, whenapplied in the canonical equation of function-valued adaptive dynamics (1), ensuresthat the constraint remains respected. From equation (64) it follows that
d
dt
∫ amax
amin
�(a, s(a))da =∫ amax
amin
�s(a, s(a))d
dts(a)da = 0, (65)
where �s(a, s(a)) = ∂∂s
�(a, s(a)). Using equation (1) and swapping the order ofintegration, we obtain
1
2µsns
∫ amax
amin
[Gs(a
′)∫ amax
amin
�s(a, s(a))σ 2s (a′, a)da
]da′ = 0. (66)
This condition is satisfied, if for all a′ we have∫ amax
amin
�s(a, s(a))σ 2s (a′, a)da = 0. (67)
There are infinitely many variance-covariance functions that satisfy this condition.One of them is
σ 2s (a′, a) = A(a)δ(a − a′) − 1, (68)
with A(a) = (�s(a, s(a)))−1 ∫ amaxamin
�s(a′′, s(a′′))da′′.
We have thus shown that all global equality constraints of type (64) can beexpressed through a variance-covariance function according to equation (68). Manyvariance-covariance functions, however, do not correspond to a constraint of thesimple form indicated in equation (64). When analyzing evolutionary outcomesunder such non-standard constraints, the canonical equation (1) has to be used.
References
Beder, J.H., Gomulkiewicz, R.: Computing the selection gradient and evolutionary responseof an infinite-dimensional trait. J. Math. Biol. 36, 299–319 (1998)
Christiansen, F.B.: On conditions for evolutionary stability for a continuously varying char-acter. Am. Nat. 138, 37–50 (1991)
Dieckmann, U., Heino, M., Parvinen, K.: The adaptive dynamics of function-valued traits.(in prep.)
Dieckmann, U., Law, R.: The dynamical theory of coevolution: A derivation from stochasticecological processes. J. Math. Biol. 34, 579–612 (1996)
Diekmann, O., Gyllenberg, M., Huang, H., Kirkilionis, M., Metz, J.A.J., Thieme, H.R.: Onthe formulation and analysis of general deterministic structured population models. II.Nonlinear theory. J. Math. Biol. 43, 157–189 (2001)
Diekmann, O., Gyllenberg, M., Metz, J.A.J., Thieme, H.R.: On the formulation and analysisof general deterministic structured population models. I. Linear theory. J. Math. Biol. 36,349–388 (1998)
Ernande, B., Dieckmann, U., Heino, M.: Adaptive changes in harvested populations: Plastic-ity and evolution of age and size at maturation. Proc. Royal Soc. London B 271, 415–423(2004)

26 K. Parvinen et al.
Ernande, B., Dieckmann, U.: The evolution of phenotypic plasticity in spatially structuredenvironments: implications of intraspecific competition, plasticity costs and environmen-tal characteristics. J. Evol. Biol 17, 613–628 (2004)
Eshel, I.: Evolutionary and continuous stability. J. Theor. Biol. 103, 99–111 (1983)Geritz, S.A.H., Kisdi, E., Meszena, G., Metz, J.A.J.: Evolutionarily singular strategies and
the adaptive growth and branching of the evolutionary tree. Evol. Ecol. 12, 35–57 (1998)Geritz, S.A.H., Metz, J.A.J., Kisdi, E., Meszena, G.: Dynamics of adaptation and evolution-
ary branching. Phys. Rev. Lett. 78, 2024–2027 (1997)Gomulkiewicz, R., Beder, J.H.: The selection gradient of an infinite-dimensional trait. SIAM
J. Appl. Math. 56, 509–523 (1996)Gomulkiewicz, R., Kirkpatrick, M.: Quantitative genetics and the evolution of reaction
norms. Evolution 46, 390–411 (1992)Gyllenberg, M., Metz, J.A.J.: On fitness in structured metapopulations. J. Math. Biol. 43,
545–560 (2001)Heino, M., Dieckmann, U., Parvinen, K.: Evolution of foraging strategies on resource gra-
dients. (in prep.)Heino, M., Metz, J.A.J., Kaitala, V.: The enigma of frequency-dependent selection. Trends.
Ecol. Evol. 13, 367–370 (1998)Jaffrezic, F., Pletcher, S.D.: Statistical models for estimating the genetic basis of repeated
measures and other function-valued traits. Genetics 156, 913–922 (2000)Kingsolver, J.G., Gomulkiewicz, R., Carter, P.A.: Variation, selection and evolution of func-
tion-valued traits. Genetica 112–113, 87–104 (2001)Leimar, O.: Evolutionary change and Darwinian demons. Selection 2, 65–72 (2001)Levins, R.: Some demographic and genetic consequenses of environmental heterogeneity
for biological control. Bull. Entomol. Soc. Am. 15, 237–240 (1969)Levins, R.: Extinction. In: M. Gerstenhaber (ed.), Some Mathematical Problems in Biology.
American Mathematical Society “Providence” RI, 1970, pp. 77–107Marrow, P., Dieckmann, U., Law, R.: Evolutionary dynamics of predator-prey systems: An
ecological perspective. J. Math. Biol. 34, 556–578 (1996)Maynard Smith, J.: Evolution and the theory of games. Am. Sci. 64, 41–45 (1976)Meszena, G., Kisdi, E., Dieckmann, U., Geritz, S.A.H., Metz, J.A.J.: Evolutionary optimisa-
tion models and matrix games in the unified perspective of adaptive dynamics. Selection2, 193–210 (2001)
Metz, J.A.J., Geritz, S.A.H., Meszena, G., Jacobs, F.J.A., van Heerwaarden, J.S.: Adaptivedynamics, a geometrical study of the consequenses of nearly faithful reproduction. In: S.J.van Strien, S.M. Verduyn Lunel (eds.), Stochastic and Spatial Structures of DynamicalSystems, North-Holland, Amsterdam, 1996a, pp. 183–231
Metz, J.A.J., Gyllenberg, M.: How should we define fitness in structured metapopulationmodels? Including an application to the calculation of ES dispersal strategies. Proc. RoyalSoc. London B 268, 499–508 (2001)
Metz, J.A.J., Mylius, S.D., Diekmann, O.: When does evolution optimize? On the relationbetween types of density dependence and evolutionarily stable life-history parame-ters. Working paper WP-96-004, IIASA, Laxenburg, Austria. http://www.iiasa.ac.at/cgi-bin/pubsrch?WP96004, 1996b
Metz, J.A.J., Nisbet, R.M., Geritz, S.A.H.: How should we define “fitness” for general eco-logical scenarios? Trends Ecol. Evol. 7, 198–202 (1992)
Parvinen, K.: Evolutionary branching of dispersal strategies in structured metapopulations.J. Math. Biol. 45, 106–124 (2002)
Parvinen, K.: On competitive exclusion in metapopulations. (in prep.)Wan, F.Y.M.: Introduction to the Calculus of Variations and its Applications. Chapman &
Hall, 1993