Embed Size (px)
Citation preview
Mathematical Preliminaries
Economics 3307 - Intermediate Macroeconomics
Aaron Hedlund
Baylor University
Fall 2013
Econ 3307 (Baylor University) Mathematical Preliminaries Fall 2013 1 / 25
Outline
I: Sequences and Series
II: Continuity and Differentiation
III: Optimization and Comparative Statics
IV: Basic Probability and Statistics
Econ 3307 (Baylor University) Mathematical Preliminaries Fall 2013 2 / 25
Sequences and Series
A sequence is a function whose domain is the positive integers.
Examples:I f (t) = 2t or 2, 4, 6, 8, 10, . . .
I f (t) = (−2)t or −2, 4,−8, 16,−32, . . .
A sequence is convergent with limit L if, for any ε > 0, there is someT such that |at − L| < ε whenever t > T . We write limt→∞ at = L.If at has no limit, it is divergent.
If at is a sequence, then sT =∑T
t=T0at ,T = 1, 2, 3, · · · is a series.
Econ 3307 (Baylor University) Mathematical Preliminaries Fall 2013 3 / 25
Sequences and Series
Theorem
If sT =∑T
t=T0at is the series associated with sequence at and
limT→∞
∣∣∣aT+1
aT
∣∣∣ = L it follows that:
1 if L < 1, then sT converges
2 if L > 1, then sT diverges
3 if L = 1, then sT may converge or diverge
A geometric series is a series sT of the form
sT =T∑
t=T0
ar t = arT0 + arT0+1 + arT0+2 + · · ·+ arT
Applying the theorem above, a geometric series converges if∣∣∣arT+1
arT
∣∣∣ = |r | < 1.
Econ 3307 (Baylor University) Mathematical Preliminaries Fall 2013 4 / 25
Sequences and Series
The partial sum of a geometric series can be written explicitly as
T∑t=T0
ar t =arT0(1− rT−T0+1)
1− r
Taking the limit when r < 1, we get
limT→∞
T∑t=T0
ar t =arT0
1− r
The present value PV of a stream of payments πtTt=1, discountedat rate r , is given by
PV =T∑t=1
πt(1 + r)t−1
Econ 3307 (Baylor University) Mathematical Preliminaries Fall 2013 5 / 25
Continuity and Differentiation
A function f : (a, b)→ R is continuous at x0 ∈ (a, b) if, for anyε > 0, there exists δ > 0 such that |f (x)− f (x0)| < ε whenever|x − x0| < δ.
We say that f (x) is differentiable at x ∈ (a, b) if the limit
f ′(x) = lim∆x→0
f (x + ∆x)− f (x)
∆x
exists and is finite. The derivative of y = f (x) can also be written asdydx or df
dx .
A function is continuously differentiable on a set S if it isdifferentiable and its derivative is continuous on S .
Econ 3307 (Baylor University) Mathematical Preliminaries Fall 2013 6 / 25
Differentiation Rules
1 f (x) = c ⇒ f ′(x) = 0.
2 f (x) = xn ⇒ f ′(x) = nxn−1.
3 g(x) = cf (x)⇒ g ′(x) = cf ′(x).
4 h(x) = f (x)± g(x)⇒ h′(x) = f ′(x)± g ′(x).
5 h(x) = f (x)g(x)⇒ h′(x) = f ′(x)g(x) + f (x)g ′(x).
6 h(x) = f (x)g(x) ⇒ h′(x) = g(x)f ′(x)−f (x)g ′(x)
[g(x)]2 .
7 h(x) = f (g(x))⇒ h′(x) = f ′(g(x))g ′(x), or dhdx = df
dx |g(x)dgdx .
8 h(x) = f −1(x)⇒ h′(x) = 1f ′(f −1(x))
, or dhdx = 1
dfdx|f−1(x)
.
Econ 3307 (Baylor University) Mathematical Preliminaries Fall 2013 7 / 25
Partial Differentiation
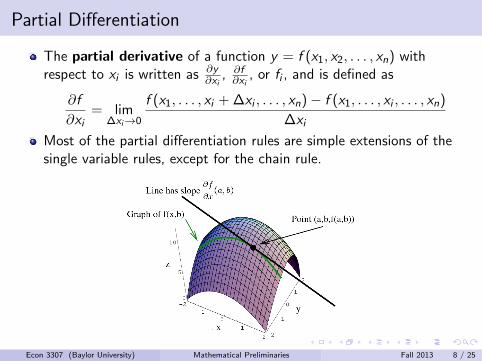
The partial derivative of a function y = f (x1, x2, . . . , xn) withrespect to xi is written as ∂y
∂xi, ∂f∂xi
, or fi , and is defined as
∂f
∂xi= lim
∆xi→0
f (x1, . . . , xi + ∆xi , . . . , xn)− f (x1, . . . , xi , . . . , xn)
∆xi
Most of the partial differentiation rules are simple extensions of thesingle variable rules, except for the chain rule.
Econ 3307 (Baylor University) Mathematical Preliminaries Fall 2013 8 / 25
Multivariable Chain Rule and Total Differentiation
Chain rule: Let y = f (u1, u2, . . . , um) and ui = gi (x1, x2, . . . , xn) forall i = 1, 2, ...,m. Denote x = (x1, . . . , xn) and defineh(x) = f (g1(x), . . . , gm(x)). Then
∂h
∂xj=
∂f
∂u1
∂g1
∂xj+∂f
∂u2
∂g2
∂xj+· · ·+ ∂f
∂um
∂gm∂xj
=m∑i=1
∂f
∂ui
∣∣∣∣ui=gi (x)
∂gi∂xj
, i.e.
∂y
∂xj=
∂y
∂u1
∂u1
∂xj+∂y
∂u2
∂u2
∂xj+ · · ·+ ∂y
∂um
∂um∂xj
=m∑i=1
∂y
∂ui
∣∣∣∣ui=gi (x)
∂ui∂xj
The total differential of a function f (x) is
df =n∑
i=1
∂f
∂xidxi
Econ 3307 (Baylor University) Mathematical Preliminaries Fall 2013 9 / 25
Second-Order Partial Derivatives
The second-order partial derivative of f (x) with respect to xi andthen xj is
fij =∂fi (x)
∂xj
Theorem (Young’s Theorem)
If f (x) has continuous first-order and second-order partial derivatives, theorder of differentiation in computing the cross-partial is irrelevant, i.e.fij = fji .
Econ 3307 (Baylor University) Mathematical Preliminaries Fall 2013 10 / 25
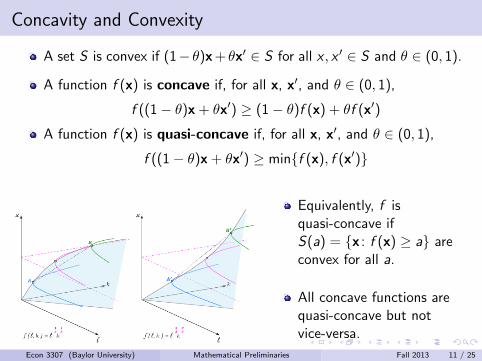
Concavity and Convexity
A set S is convex if (1− θ)x + θx′ ∈ S for all x , x ′ ∈ S and θ ∈ (0, 1).
A function f (x) is concave if, for all x, x′, and θ ∈ (0, 1),
f ((1− θ)x + θx′) ≥ (1− θ)f (x) + θf (x′)
A function f (x) is quasi-concave if, for all x, x′, and θ ∈ (0, 1),
f ((1− θ)x + θx′) ≥ minf (x), f (x′)
Equivalently, f isquasi-concave ifS(a) = x : f (x) ≥ a areconvex for all a.
All concave functions arequasi-concave but notvice-versa.
Econ 3307 (Baylor University) Mathematical Preliminaries Fall 2013 11 / 25
Concavity and Differentiability
Univariate functions: Let f (x) be twice continuously differentiable.I If f is concave, then f
′′ ≤ 0.
Bivariate functions: Let f (x1, x2) be twice continuously differentiable.I If f is concave, then f11 ≤ 0 and f11f22 − (f12)2 ≥ 0.
I If f (x1, x2) is quasi-concave, then f11f2
2 − 2f1f2f12 + f22f2
1 < 0.
Econ 3307 (Baylor University) Mathematical Preliminaries Fall 2013 12 / 25
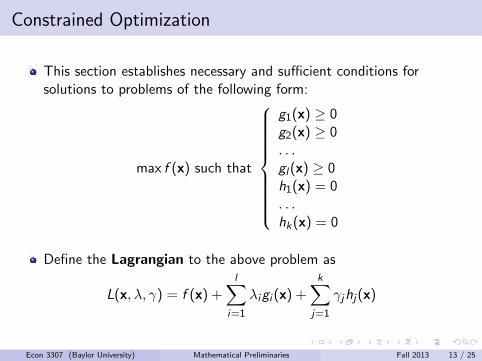
Constrained Optimization
This section establishes necessary and sufficient conditions forsolutions to problems of the following form:
max f (x) such that
g1(x) ≥ 0g2(x) ≥ 0. . .gl(x) ≥ 0h1(x) = 0. . .hk(x) = 0
Define the Lagrangian to the above problem as
L(x, λ, γ) = f (x) +l∑
i=1
λigi (x) +k∑
j=1
γjhj(x)
Econ 3307 (Baylor University) Mathematical Preliminaries Fall 2013 13 / 25
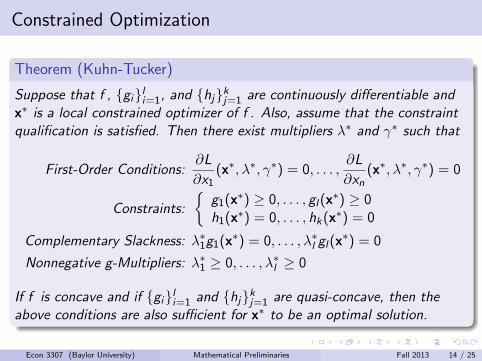
Constrained Optimization
Theorem (Kuhn-Tucker)
Suppose that f , gili=1, and hjkj=1 are continuously differentiable andx∗ is a local constrained optimizer of f . Also, assume that the constraintqualification is satisfied. Then there exist multipliers λ∗ and γ∗ such that
First-Order Conditions:∂L
∂x1(x∗, λ∗, γ∗) = 0, . . . ,
∂L
∂xn(x∗, λ∗, γ∗) = 0
Constraints:
g1(x∗) ≥ 0, . . . , gl(x∗) ≥ 0h1(x∗) = 0, . . . , hk(x∗) = 0
Complementary Slackness: λ∗1g1(x∗) = 0, . . . , λ∗l gl(x∗) = 0
Nonnegative g-Multipliers: λ∗1 ≥ 0, . . . , λ∗l ≥ 0
If f is concave and if gili=1 and hjkj=1 are quasi-concave, then theabove conditions are also sufficient for x∗ to be an optimal solution.
Econ 3307 (Baylor University) Mathematical Preliminaries Fall 2013 14 / 25
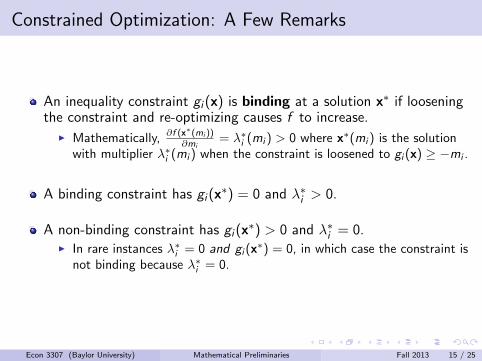
Constrained Optimization: A Few Remarks
An inequality constraint gi (x) is binding at a solution x∗ if looseningthe constraint and re-optimizing causes f to increase.
I Mathematically, ∂f (x∗(mi ))∂mi
= λ∗i (mi ) > 0 where x∗(mi ) is the solutionwith multiplier λ∗i (mi ) when the constraint is loosened to gi (x) ≥ −mi .
A binding constraint has gi (x∗) = 0 and λ∗i > 0.
A non-binding constraint has gi (x∗) > 0 and λ∗i = 0.I In rare instances λ∗i = 0 and gi (x∗) = 0, in which case the constraint is
not binding because λ∗i = 0.
Econ 3307 (Baylor University) Mathematical Preliminaries Fall 2013 15 / 25
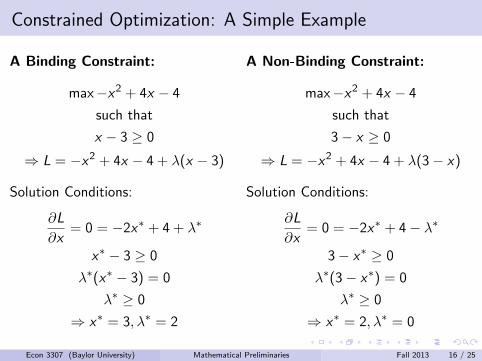
Constrained Optimization: A Simple Example
A Binding Constraint:
max−x2 + 4x − 4
such that
x − 3 ≥ 0
⇒ L = −x2 + 4x − 4 + λ(x − 3)
Solution Conditions:
∂L
∂x= 0 = −2x∗ + 4 + λ∗
x∗ − 3 ≥ 0
λ∗(x∗ − 3) = 0
λ∗ ≥ 0
⇒ x∗ = 3, λ∗ = 2
A Non-Binding Constraint:
max−x2 + 4x − 4
such that
3− x ≥ 0
⇒ L = −x2 + 4x − 4 + λ(3− x)
Solution Conditions:
∂L
∂x= 0 = −2x∗ + 4− λ∗
3− x∗ ≥ 0
λ∗(3− x∗) = 0
λ∗ ≥ 0
⇒ x∗ = 2, λ∗ = 0
Econ 3307 (Baylor University) Mathematical Preliminaries Fall 2013 16 / 25
Comparative Statics
Comparative statics analyzes how optimal solutions respond tochanges in underlying parameters.
I Example: how does labor supply change in response to a wage increase?
First, an important theorem:
Theorem (Implicit Function Theorem)
Let F (x, y) be a continuously differentiable function around (x∗, y∗) withF (x∗, y∗) = 0 and Fy (x∗, y∗) 6= 0. Then there is a continuouslydifferentiable function y = f (x) defined in a neighborhood B of x∗ suchthat
1 F (x, y(x)) = 0 for all x ∈ B
2 y∗ = f (x∗)
3∂y∂xi
(x∗) = fi (x∗) = −Fxi (x∗, y∗)/Fy (x∗, y∗)
Econ 3307 (Baylor University) Mathematical Preliminaries Fall 2013 17 / 25
Comparative Statics - One Endogenous Variable
Assume that we have an optimization problem that gives thefollowing solution condition:
F (x∗, α) = 0
Assume that F and the implicit solution x∗(α) are differentiable. As afunction of α, we have
F (x∗(α), α) = 0
Differentiating by α gives
Fxdx∗
dα+ Fα = 0⇒ dx∗
dα= −Fα(x∗, α)
Fx(x∗, α)
Econ 3307 (Baylor University) Mathematical Preliminaries Fall 2013 18 / 25
Comparative Statics - Two Endogenous Variables
Suppose we have the following solution conditions:
F 1(x∗1 , x∗2 , α) = 0
F 2(x∗1 , x∗2 , α) = 0
Assume that the solution gives differentiable implicit functions x∗1 (α)and x∗2 (α). Differentiating with respect to α gives
F 11
∂x∗1∂α
+ F 12
∂x∗2∂α
+ F 1α = 0
F 21
∂x∗1∂α
+ F 22
∂x∗2∂α
+ F 2α = 0
Solving the system of equations gives
∂x∗1∂α
=F 2αF
12 − F 1
αF22
F 11 F
22 − F 2
1 F12
and∂x∗2∂α
=F 1αF
21 − F 2
αF11
F 11 F
22 − F 2
1 F12
Econ 3307 (Baylor University) Mathematical Preliminaries Fall 2013 19 / 25
Probability and Statistics
Let Ω = ω1, ω2, . . . , ωn denote the sample space of an experiment,where each ωi is an outcome.
I Example: tossing a single die can yield any of the following outcomes:1, 2, 3, 4, 5, 6.
An event is a subset of outcomes in the sample space E ⊂ Ω.I Example: getting an even-numbered toss is the event that consists of
the following outcomes: 2, 4, 6.
We can assign a probability P(E ) to events, where P satisfies1 0 ≤ P(E ) ≤ 1 for all E .
2 P(Ω) = 1.
3 P(E1 ∪ · · · ∪ Em) =∑m
i=1 P(Ei ) if E1, . . . ,Em are mutually exclusiveevents.
Econ 3307 (Baylor University) Mathematical Preliminaries Fall 2013 20 / 25
Conditional Probability and Independence
The conditional probability of E2 given E1 is the probability that E2
will occur given that E1 has occurred. It is represented by
P(E2|E1) =P(E1 ∩ E2)
P(E1)
Events E1 and E2 are independent if P(E2|E1) = P(E2), orequivalently, if P(E1 ∩ E2) = P(E1)P(E2).
In applications it is useful to know Bayes’ rule:
P(E |F ) =P(E ∩ F )
P(F )=
P(F |E )P(E )
P(F |E )P(E ) + P(F |E c)P(E c)
Econ 3307 (Baylor University) Mathematical Preliminaries Fall 2013 21 / 25
Random Variables and Expectations
A random variable X is a function defined on a sample space,X : Ω→ R.
I Example: Ω = Heads, Tails, X (Heads) = 0, X (Tails) = 1.
The expected value or mean of a random variable X is
E(X ) =n∑
i=1
xiP(ω : X (ω) = xi )
where X takes on values x1, . . . , xn. Let P(xi ) = P(ω : X (ω) = xi ).I Above example: E(X ) = 0 · 0.5 + 1 · 0.5 = 0.5.
We often write µX instead of E(X ).
Econ 3307 (Baylor University) Mathematical Preliminaries Fall 2013 22 / 25
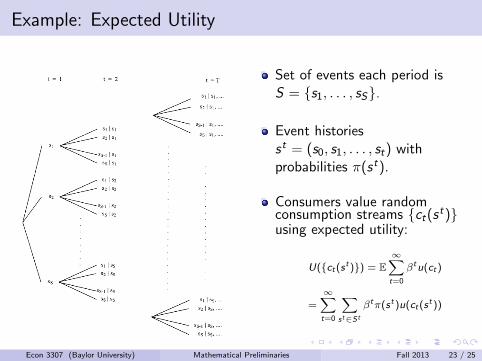
Example: Expected Utility
Set of events each period isS = s1, . . . , sS.
Event historiesst = (s0, s1, . . . , st) withprobabilities π(st).
Consumers value randomconsumption streams ct(st)using expected utility:
U(ct(st)) = E∞∑t=0
βtu(ct)
=∞∑t=0
∑st∈St
βtπ(st)u(ct(st))
Econ 3307 (Baylor University) Mathematical Preliminaries Fall 2013 23 / 25
Variance, Covariance, and Correlation
The variance of a random variable is
Var(X ) = E[(X − µX )2] =n∑
i=1
(xi − µX )2P(xi )
The covariance of two random variables X and Y is
Cov(X ,Y ) = E[(X−µX )(Y −µY )] =n∑
i=1
(xi − µX )(yi − µY )P(xi , yi )
The correlation between X and Y is Corr(X ,Y ) = Cov(X ,Y )SD(X )SD(Y ) ,
where SD(X ) =√Var(X ) is the standard deviation of X .
Econ 3307 (Baylor University) Mathematical Preliminaries Fall 2013 24 / 25
Sample Statistics
When confronting actual data, the underlying probabilities are notreadily observable, forcing us to compute sample statistics.
Suppose we have data (x1, y1), (x2, y2), . . . , (xn, yn).
The sample mean and variance of X are X = 1n
∑ni=1 xi and
Var(X ) = 1n−1
∑ni=1 (xi − X )2.
The sample covariance between X and Y isCov(X ,Y ) = 1
n−1
∑ni=1 (xi − X )(yi − Y ).
Econ 3307 (Baylor University) Mathematical Preliminaries Fall 2013 25 / 25





























