Embed Size (px)
Citation preview

Mathematical modelling of controlled drugrelease from polymer micro-spheres:incorporating the effects of swelling,diffusion and dissolution via moving
boundary problems
A thesis submitted for the degree ofDoctor of Philosophy
ByMike Hou-Ning Hsieh
B Eng (Hons)/ B AppSc (Hons)
School of Mathematical SciencesScience and Engineering Faculty
Queensland University of Technology
December 13, 2012

Abstract
Controlled drug delivery is a key topic in modern pharmacotherapy, where controlleddrug delivery devices are required to prolong the period of release, maintain a constantrelease rate, or release the drug with a predetermined release profile. In the pharma-ceutical industry, the development process of a controlled drug delivery device may befacilitated enormously by the mathematical modelling of drug release mechanisms, di-rectly decreasing the number of necessary experiments. Such mathematical modelling isdifficult because several mechanisms are involved during the drug release process. Themain drug release mechanisms of a controlled release device are based on the device’sphysiochemical properties, and include diffusion, swelling and erosion.
In this thesis, four controlled drug delivery models are investigated. These four modelsselectively involve the solvent penetration into the polymeric device, the swelling of thepolymer, the polymer erosion and the drug diffusion out of the device but all share twocommon key features. The first is that the solvent penetration into the polymer causesthe transition of the polymer from a glassy state into a rubbery state. The interfacebetween the two states of the polymer is modelled as a moving boundary and the speedof this interface is governed by a kinetic law. The second feature is that drug diffusiononly happens in the rubbery region of the polymer, with a nonlinear diffusion coefficientwhich is dependent on the concentration of solvent. These models are analysed by usingboth formal asymptotics and numerical computation, where front-fixing methods andthe method of lines with finite difference approximations are used to solve these modelsnumerically. This numerical scheme is conservative, accurate and easily implemented tothe moving boundary problems and is thoroughly explained in Section 3.2. From thesmall time asymptotic analysis in Sections 5.3.1, 6.3.1 and 7.2.1, these models exhibitthe non-Fickian behaviour referred to as Case II diffusion, and an initial constant rate ofdrug release which is appealing to the pharmaceutical industry because this indicates zero-order release. The numerical results of the models qualitatively confirms the experimentalbehaviour identified in the literature. The knowledge obtained from investigating thesemodels can help to develop more complex multi-layered drug delivery devices in order toachieve sophisticated drug release profiles. A multi-layer matrix tablet, which consists ofa number of polymer layers designed to provide sustainable and constant drug release orbimodal drug release, is also discussed in this research.
The moving boundary problem describing the solvent penetration into the polymer alsoarises in melting and freezing problems which have been modelled as the classical one-phase Stefan problem. The classical one-phase Stefan problem has unrealistic singularities
i

existed in the problem at the complete melting time. Hence we investigate the effect ofincluding the kinetic undercooling to the melting problem and this problem is calledthe one-phase Stefan problem with kinetic undercooling. Interestingly we discover theunrealistic singularities existed in the classical one-phase Stefan problem at the completemelting time are regularised and also find out the small time behaviour of the one-phaseStefan problem with kinetic undercooling is different to the classical one-phase Stefanproblem from the small time asymptotic analysis in Section 3.3. In the case of meltingvery small particles, it is known that surface tension effects are important. The effectof including the surface tension to the melting problem for nanoparticles (no kineticundercooling) has been investigated in the past, however the one-phase Stefan problemwith surface tension exhibits finite-time blow-up. Therefore we investigate the effect ofincluding both the surface tension and kinetic undercooling to the melting problem fornanoparticles and find out the the solution continues to exist until complete melting.The investigation of including kinetic undercooling and surface tension to the meltingproblems reveals more insight into the regularisations of unphysical singularities in theclassical one-phase Stefan problem. This investigation gives a better understanding ofmelting a particle, and contributes to the current body of knowledge related to meltingand freezing due to heat conduction.
ii

The work contained in this thesis has not been previously submit-ted to meet requirements for an award at this or any other highereducation institution. To the best of my knowledge and belief,the thesis contains no material previously published or written byanother person except where due reference is made.
Mike Hou-Ning Hsieh
Signature:author
Date:
iii

Acknowledgements
I am indebted to my family and friends for their interest and encouragement during thisproject. I thank Steven Psaltis, Burton Wu and Glen Oberman for helping me to solvethe different kinds of latex problems during my research and I also thank Chuen Chanfor dealing with different problems occurring with my office computer. I thank JulianBack for his collaboration on the investigation of Chapter 4. I thank my supervisors fordiscussing possible methods of solving problems encountered during this project. I alsothank my main supervisor for his guidance during the preparation and submission of mypublications.
iv

Publications
− Hsieh M., S. W. McCue, T. J. Moroney and M. I. Nelson (2011). Drug diffusion frompolymeric delivery devices: A problem with two moving boundaries, in Proceedingsof the 15th Biennial Computational Techniques and Applications Conference CTAC-2010, W. McLean and A. J. Roberts, eds., ANZIAM J. 52, Austral. MathematicalSoc., Australian National University, Canberra, Australia, C549− C566.
− McCue S. W., M. Hsieh, T. J. Moroney and M. I. Nelson (2011). Asymptotic andnumerical results for a model of solvent-dependent drug diffusion through polymericspheres. SIAM Journal on Applied Mathematics (SIAP) 76, 2287 - 2311.
v

Contents
Abstract i
Declaration iii
Acknowledgements iv
Publications v
Chapter 1 Introduction 21.1 Diffusion-controlled release systems . . . . . . . . . . . . . . . . . . . . . . 21.2 Swelling-controlled release systems . . . . . . . . . . . . . . . . . . . . . . 51.3 Erosion-controlled release systems . . . . . . . . . . . . . . . . . . . . . . 91.4 Multi-layer release systems . . . . . . . . . . . . . . . . . . . . . . . . . . 91.5 Aims and objectives of thesis . . . . . . . . . . . . . . . . . . . . . . . . . 10
Chapter 2 Literature Review 132.1 Linear diffusion of drug from a sphere . . . . . . . . . . . . . . . . . . . . 132.2 Swelling controlled release system . . . . . . . . . . . . . . . . . . . . . . . 16
2.2.1 Stefan models in swelling controlled drug release system . . . . . . 182.2.2 Diffusion models in swelling controlled release system . . . . . . . 28
2.3 Erosion controlled release system . . . . . . . . . . . . . . . . . . . . . . . 312.3.1 The surface erosion . . . . . . . . . . . . . . . . . . . . . . . . . . . 312.3.2 The bulk erosion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Chapter 3 A one-phase Stefan problem with kinetic undercooling 383.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.1.1 Classical problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . 393.1.2 Model with kinetic undercooling . . . . . . . . . . . . . . . . . . . 40
3.2 Numerical scheme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413.2.1 Method of Lines . . . . . . . . . . . . . . . . . . . . . . . . . . . . 433.2.2 Finite difference method . . . . . . . . . . . . . . . . . . . . . . . . 443.2.3 Finite volume method . . . . . . . . . . . . . . . . . . . . . . . . . 463.2.4 ode15i . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 503.2.5 Comparison of numerical methods . . . . . . . . . . . . . . . . . . 513.2.6 The case of µ = 0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
vi

3.3 Small time limit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 553.4 Large Stefan number limit . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
3.4.1 The first time scale t = O(µ2/λ) . . . . . . . . . . . . . . . . . . . 583.4.2 The second time scale t = O(λ) . . . . . . . . . . . . . . . . . . . . 633.4.3 The third time scale . . . . . . . . . . . . . . . . . . . . . . . . . . 67
3.5 Effect of µ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 743.6 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Chapter 4 Radially-symmetric melting problem with a Gibbs-Thomson condition 804.1 Stefan problem with surface tension . . . . . . . . . . . . . . . . . . . . . 804.2 Stefan problem with surface tension and kinetic undercooling . . . . . . . 834.3 Numerical results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 834.4 Near-extinction behaviour the solid-melt interface . . . . . . . . . . . . . . 874.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
Chapter 5 Drug diffusion from a spherical polymer: a model with a moving bound-ary 89
5.1 Mathematical model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 905.2 Numerical scheme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 935.3 Asymptotic analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
5.3.1 Small-time behaviour . . . . . . . . . . . . . . . . . . . . . . . . . 1015.3.2 Large “Stefan number” limit . . . . . . . . . . . . . . . . . . . . . 105
5.4 Numerical experimentation . . . . . . . . . . . . . . . . . . . . . . . . . . 1115.4.1 The effect of varying β . . . . . . . . . . . . . . . . . . . . . . . . . 1125.4.2 The effect of varying λ . . . . . . . . . . . . . . . . . . . . . . . . . 1145.4.3 The effect of varying µ . . . . . . . . . . . . . . . . . . . . . . . . . 117
5.5 An alternate boundary condition for the drug transport at the glassy-rubbery interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
5.6 Multi-layered system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1205.6.1 Numerical procedure . . . . . . . . . . . . . . . . . . . . . . . . . . 1215.6.2 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
5.7 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Chapter 6 Swelling controlled drug release system: a model with two moving bound-aries 127
6.1 Mathematical model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1286.2 Numerical scheme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
6.2.1 A comparison with published results for outward flux . . . . . . . 1396.3 Asymptotic analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
6.3.1 Small-time behaviour . . . . . . . . . . . . . . . . . . . . . . . . . 1406.3.2 Large “Stefan number” limit . . . . . . . . . . . . . . . . . . . . . 145
6.4 Result . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1496.4.1 The effect of varying the parameters . . . . . . . . . . . . . . . . . 151
6.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
vii

Chapter 7 Erosion controlled drug release systems 1567.1 The bulk erosion model . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
7.1.1 Numerical experimentation . . . . . . . . . . . . . . . . . . . . . . 1607.2 The surface erosion model . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
7.2.1 Asymptotic analysis . . . . . . . . . . . . . . . . . . . . . . . . . . 1667.2.2 Numerical experimentation . . . . . . . . . . . . . . . . . . . . . . 169
7.3 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
Chapter 8 Discussion 1758.1 Future work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
Appendix A Parameter estimation 181
Appendix B Small time calculations 183
References 186
viii

Chapter 1
Introduction
In the pharmaceutical industry, the development of a new product is heavily based onexperimentation in order to create a desired drug release profile. The whole process can befacilitated greatly by mathematical modelling of the drug release which directly reducesthe number of necessary experiments during the development process, by identifying thekey parameters which determine the desired rate and profile of drug release. There existboth empirical and mechanistic models in the mathematical modelling of drug releaseliterature. This chapter gives a broad overview of the different controlled release systems.The detailed literature review is found in Chapter 2, focusing on the mechanistic modelswhich elucidate the mass transport and chemical reaction processes in the drug releasefrom a polymeric device, providing a physical understanding of the controlled releasesystems.
According to review papers Wu et al. (2005), Lin and Metters (2006), and Arifin et al.(2006), the three major mechanisms of drug transport in a controlled release system arediffusion, swelling and erosion. The pharmaceutical industry began with utilizing non-biodegradable polymers as drug carriers, and advanced to employ both non-biodegradableand biodegradable polymers together. The main drug release mechanism of drug carri-ers using non-biodegradable polymers is the diffusion process due to the physiochemicalproperties of polymers, as in Leong and Langer (1987). The swelling process is the prin-cipal drug release mechanism of drug carriers using hydrophilic polymers that are eitherbiodegradable or non-biodegradable. The erosion process is the most important drugrelease mechanism of drug carriers using biodegradable polymers.
1.1 Diffusion-controlled release systems
The transport mechanism of diffusion-controlled release systems is modelled by Fick’ssecond law of diffusion, which generally leads to the initial-boundary-value problem
∂V
∂t= ∇ · (D(V )∇V ) in B, (1.1)
V = Va on ∂B, (1.2)
V = V0 at t = 0, (1.3)
where V is the concentration of a drug, and B denotes the domain of interest. Thesystem (1.1)–(1.3) has analytical solution when the diffusion coefficient D in (1.1) is a
2

constant and B represents a simple geometry. Diffusion-controlled release systems can beclassified into reservoir and matrix systems according to the region where the diffusionmainly occurs, such as in Lowman and Peppas (1999) and Arifin et al. (2006).
RD RP
Drug
Polymer
Figure 1.1: The cross-section of the reservoir system
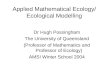
In reservoir systems, the drug is stored homogeneously in the red star region of Figure1.1 and is confined by the polymer in the blue region. The drug must diffuse through thepolymer layer before reaching the surrounding medium. Therefore the reservoir systemis a linear diffusion problem which may be solved analytically.
Dissolved drug Undissolved drug
Figure 1.2: The cross-section of the matrix system
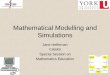
In the matrix system, the drug concentration is incorporated into the polymer matrix andis uniformly distributed over the system. Matrix systems are categorised into dissolveddrug and dispersed drug systems. In a dissolved drug system, the initial drug loading isless than the solubility of the drug in the polymer matrix as shown in the left part ofFigure 1.2, and hence the dissolved drug system is an under-saturated system, and lineardiffusion may be applied. In a dispersed drug system, the initial drug loading is above
3

the solubility of the drug in the polymer matrix, as shown in the right part of Figure 1.2.Therefore the dispersed drug system is an over-saturated system.
As in Figure 1.2, the dispersed drug system has a core (non-diffusing) region in blue starand a dissolved (diffusing) region in green. In the core region, the drug is undissolved andthe drug concentration is the same as the initial concentration. In the dissolved region,the drug is dissolved and diffusion occurs. The core region continuously diminishes asmore drug dissolves into the outer region, implying the occurrence of a moving front atthe interface of these two regions. Therefore, the dispersed drug system is a moving-boundary problem rather than a linear diffusion problem. It is almost impossible toanalytically solve a moving-boundary problem except in some special cases.
The first approximate solution of the dispersed drug system with perfect sink boundarycondition under planar geometry was proposed by Higuchi (1961) who used a pseudo-steady state approximation without considering the effect of the boundary layer. Higuchi(1963) also utilized the pseudo-steady state approximation to generate the correspondingsolution for a spherical pellet. A pseudo-steady state approximation assumes a linearprofile of drug concentration over the dissolved region and that the drug concentration overthe dissolved region is only dependent on a spatial variable. Applying this approach relieson the initial drug loading being much greater than the solubility of drug in the polymermatrix, and ideally when the initial drug loading is at least three-fold the solubility ofdrug in the polymer matrix.
Paul and McSpadden (1976) derived the exact solution for drug release from a planarsystem into a perfect sink by using combination of variables. Lee (1980) did not adoptthe approach of using the pseudo-steady state approximation, instead employing a refinedheat balance integral method. This approach does not have the restriction on the initialdrug loading of Higuchi (1961, 1963). Abdekhodaie and Cheng (1996, 1997) tried todevelop an exact solution of drug release from a spherical polymer network into bothinfinite and finite external medium by using combination of variables too, however thissolution is only effective in the infinite external medium with the pseudo-steady stateapproximation.
Zhou and Wu (2002) presented both a general solution and a simple solution to the drugrelease from a dispersed diffusion-controlled system. These solutions are approximationsto the drug release of the dispersed system with a boundary layer in a planar matrixand are based on a pseudo-steady state approximation. The advantage of the generalsolution over the simple solution is that the general solution may still work when theinitial drug loading is slightly above the solubility of drug in the polymer. When theratio of initial drug loading over the solubility of drug in the polymer matrix increases,the general solution approaches the exact solution. Zhou and Wu (2003) extended this toinclude a multi-particulate system.
4

1.2 Swelling-controlled release systems
Swelling-controlled release systems can provide enhanced drug diffusion from hydrophilicpolymer networks into the external medium. The cause of enhanced drug diffusion isthe swelling characteristic of hydrophilic polymer network which occurs on contact withan external solvent (water or biological fluid). The drug carriers formed by hydrophilicpolymers such as methylcellulose and hydroxypropylmethylcellulose (HPMC) are calledhydrogels. When water starts to penetrate into the hydrogel, polymer disentanglementor polymer chain relaxation occurs, resulting in an increase in volume of the hydrogel.The swelling hydrogel implies the simultaneous transition from a glassy state to rubberystate at the outermost region of hydrogel. The drug in the glassy region is yet to bedissolved, but the drug in the rubbery region dissolves with enhanced diffusivity. Thediffusion coefficient of the drug is greatly increased when more solvent is in the rubberyregion. The hydrogel will eventually stop swelling and start to dissolve when the polymerentanglement is adequately weak.
A schematic depiction of the swelling-controlled release system is presented in Figure1.3. There are two interfaces, S1 and S2, in the swelling-controlled release system. Theinterface S1 separates the glassy and rubbery parts, and moves inwards after the hydrogelis embedded in an aqueous environment. The interface S2 separates hydrogel and externalsolvent and it is also a moving front, moving outwards as hydrogel swells, before movinginwards when the hydrogel starts to dissolve, (for further discussion see Siepmann andPeppas (2001), Narasimhan (2001), Lin and Metters (2006), and Arifin et al. (2006)).
Several models have been proposed to describe the underlying mass transport mechanismsof the swelling-controlled release system, and they are classified by the approach of modelby Narasimhan and Peppas (1997b) as
− Phenomenological models,− Models that employ external mass transfer,− Models that utilise stress relaxation,− Anomalous transport models and− Models that use molecular theories.
Each model makes certain assumptions, and therefore restricts the applicability of therespective model. There is no model which takes into consideration all the importantphenomena on which occur during the drug release.
Phenomenological modelsTu and Ouano (1977) assumed Fickian diffusion for the penetration of solvent into apolymer network and incorporated the concentration-dependent diffusion coefficient ofthe solvent in their model, which has two moving boundaries. Tu (1977) later proposeda multi-phase Stefan model and used the notion of the disassociation rate for describingthe dissolution of the polymer. The shortcoming of this approach is that the rate of
5

Glassy hydrogel
Swollen hydrogel
Glassy core region
Rubbery region
S1 Glassy/Rubbery interfaceS2 Ploymer/Solvent interface
Diminished hydrogel
S1S2
S2
Drug in glassy core regionis completely dissolved
Figure 1.3: Hydrogel cross-section
6

disassociation is handled as a model parameter, and Tu do not give a more mechanisticor physical exposition of this disassociation rate.
Devotta et al. (1994) assumed the rapid transition from glassy state to rubbery state andincorporated the reptation time of polymer molecules according to de Grenes (1971), aswell as the rate of disassociating polymer chains and diffusion through the boundary layerin their model. A surprising observation from their experiment is that if the particle sizeof the polymer falls below a critical value, the dissolution time does not change. Devottaet al. (1995) improved the Devotta et al. (1994) model by incorporating the additionalphysical feature of dissolution. The rate of disassociation is assumed to be proportional tothe mobility of the disentangled polymer chain. The physical origin of some parametersused by Devotta et al. (1994, 1995) was not clarified.
Models in Devotta et al. (1994, 1995), Tu (1977) and Tu and Ouano (1977) only con-sider the polymer and solvent. Harland et al. (1988) proposed the first mathematicalmodel for drug release in a dissolving polymer system, assuming Fickian transport fordrug and solvent with constant diffusion coefficients, and using mass balance equationsat both interfaces. Harland et al. did not discuss the molecular origin of some importantparameters used in the model. Ju et al. (1995) developed a comprehensive model of theswelling-controlled release system. They introduced the polymer disentanglement concen-tration (an important physical property of the polymer), diffusion layer and concentration-dependent drug diffusion coefficient. Ju et al. also proposed an equation for the polymerdisentanglement concentration based on the molecular weight of the polymer network.
Siepmann et al. (1999) proposed a mathematical model for a swelling-controlled re-lease system without polymer dissolution in a cylindrical geometry and employed theconcentration-dependent diffusion coefficients for solvent and drug. Siepmann et al. (1999)also assumed homogeneous swelling throughout the whole polymer network, including theglassy core region. Siepmann et al. extended this model by including polymer dissolu-tion. They used a Fujita-type diffusion coefficient for the solvent and drug from Fujita(1961a), which is in exponential form and based on free volume theory. They also utilizeda constant dissolution rate for the mass balance equation of polymer dissolution. Theeffects of utilizing a constant dissolution rate on the drug release are over-prediction ofdrug release at the beginning of release and under-prediction of drug release in the longrun.
Siepmann and Peppas (2000) improved the Siepmann et al. (1999) model mainly byadopting inhomogeneous swelling of polymer network, naming this the sequential layermodel. The swelling of polymer now occurs layer by layer from the surface of the polymernetwork towards the centre, however this model does not consider the existence of theglassy-rubbery interface. An improvement to this model can be made by coupling thepolymer species with drug and solvent species in the transport equation such as has beendone previously by Harland et al. (1988) and Narasimhan and Peppas (1997a). Wu et al.(2005) proposed a mathematical model for swelling-controlled release system with a cylin-drical geometry. The two moving boundaries were explicitly derived and an additional
7

boundary condition for volume balance is introduced.
Models employing external mass transfer resistanceLee and Peppas (1987) proposed a mathematical model for a dissolving polymer andemployed external mass transfer resistance at the surface of the polymer network. Leeand Lee (1991) also proposed a mathematical model that utilizes external mass transferresistance, and their results agree with Lee and Peppas (1987). Lee and Lee (1991) alsoshowed that dissolution appears at large experimental times, which agrees with the ideaof reptation in de Grenes (1971). The models in Lee and Peppas (1987) and Lee andLee (1991) do not include drug concentration in their models, however the experimentsin Papanu et al. (1989) show the effects of external mass transfer resistance on polymerdissolution are insignificant and both models do not account for the time taken by swellingbefore polymer dissolution.
Models utilizing stress relaxationBrochard and de Gennes (1983) proposed a mathematical model which describes the dis-solution of a polymer droplet by stress relaxation. The stress originates from opposing thesolvent penetration during the swelling process. Herman and Edwards (1990) improvedthis model by incorporating the notion of stress resulting from swelling with reptation.The drawback of Herman and Edwards (1990) is that several parameters are difficult toacquire from experiments. Models in Brochard and de Gennes (1983) and Herman andEdwards (1990) do not consider the drug in their models.
Anomalous transport modelsThe dissolution of polymer networks is caused by polymer disentanglement and incurs thetransport mechanism of swelling-controlled system deviating from the standard diffusion.Papanu et al. (1989) proposed an anomalous model which also includes the convective fluxand reptation. The model can account for both Fickian and Case II diffusion mechanisms.Wu and Peppas (1993) developed an anomalous mode from linear irreversible thermody-namic theory. Peppas et al. (1994) developed a new anomalous mode by introducing theconcept of “dissolution clock” which governs the dissolution process of polymer, but didnot explain the observation of a decrease in melt viscosity. Ju et al. (1995) developed twoscaling laws for predicting the polymer and drug release from polymer network.
Models using molecular theoriesNarasimhan and Peppas (1996a) proposed a mathematical model to describe the disso-lution of rubbery polymer by dividing the penetrant concentration field into three dis-tinct regimes, and the diffusion coefficient and disentanglement rate are both defined bymolecular argument. Narasimhan and Peppas (1996b) improved their model by addingmechanisms of polymer chain disentanglement and reptation into the model, and applying
8

the linear irreversible thermodynamics argument to the solvent. Narasimhan and Pep-pas (1997a) extended this model by including the drug solute with boundary layer andcalculated the drug release rate by applying the Flory-Rehner theory in Narasimhan andPeppas (1996b).
1.3 Erosion-controlled release systems
Erosion-controlled release systems have complex drug release behaviour, disparting poly-mer chains from the polymer network either by chemical or physical processes. Thechemical process refers to the polymer chain, bond cleavage or scission reaction with asolvent. There are two general scenarios of polymer erosion; surface (heterogeneous) andbulk (homogeneous) erosions. In surface erosion, the spherical polymer has a shrinkingdiameter as the erosion of the polymer taking place from the surface of the polymer net-work. In bulk erosion, a spherical polymer has a constant diameter size and external fluidis allowed to penetrate into the polymer, so that the erosion process occurs within thepolymer network. Burkersroda et al. (2002) suggested that the manner of polymer ero-sion depends on the erosion number ψ, which is the ratio of characteristic time of solventdiffusing into the polymer to the degradation rate of the polymer backbone. Burkersrodaet al. also indicates that the type of erosion behaviour depends on the type of polymer,which strongly affects the degradation rate of the polymer backbone.
The drug release process of an erosion-controlled system is a combination of mass trans-port and chemical reaction phenomena. The process involves several important mech-anisms, which may include drug dissolution, polymer degradation, porosity creation,micro-environmental pH change due to polymer degradation, diffusion of drug in poly-mer matrix, and autocatalytic effects during polymer degradation. The interplay of thesecomplex mechanisms obstructs the development of a general, useful and accurate math-ematical model that is able to predict all the mechanism contributions on the resultingdrug release kinetics from a biodegradable polymer.
The mechanistic models of erosion-controlled systems account for the physiochemical phe-nomena that basically involve diffusional mass transfer and chemical reaction processesand are classified primarily into diffusion-reaction models and cellular-automata models.The diffusion-reaction models assume the erosion process is a transport process of poly-mer diffusion and chemical reactions, whereas the cellular-automata models consider theerosion process as a random event of surface detachment from the polymer network. Thediffusion-reaction models are primarily developed for the bulk-eroding devices whereasthe cellular-automata models are primarily built for the surface-eroding devices.
1.4 Multi-layer release systems
In multi-layer release systems, a basal polymer layer is made and followed by laminationof subsequent layers. Each layer may or may not incorporate drug during fabricationin order to produce an unique single-drug release profile. Alternatively each layer canincorporate different amounts of drug to provide tunable multiple drug release profiles.Both methods can be done by independently adjusting the crosslinking density of each
9

layer. Grassi et al. (2004) developed a semi-empirical model for multi-layer system. Theydeveloped the model by establishing an equation that described drug dissolution and bytaking into account the resistance to drug release given by the presence of a growing gellayer around the system. Papadokostaki et al. (2008) proposed a general mathematicalmodel for a two-layer release system in an one dimensional slab and the model adhered theFickian transport for drug and solvent. The diffusion coefficient of drug was dependenton solvent concentration.
1.5 Aims and objectives of thesis
Main moving boundary problem (Chap. 5)
Solventpenetration
Drug
diffusion
Stefan problemwith kinetic undercooling
(Chap. 3)
Stefan problemwith kinetic undercooling
and surface tension(Chap. 4)
Multi-layereddrug release system
(Chap. 5)
Swelling-controlleddrug release system
(Chap. 6)
Surface erosion(Chap. 7)
Bulk erosion(Chap. 7)
Two movingboundaryproblems
.
Figure 1.4: The flow diagram of the project.
Controlled drug delivery through oral administration is a key topic in modern pharma-cotherapy. The objectives of designing a controlled drug delivery device may includeprolonging the period of drug release, maintaining a constant drug release rate, or a drugrelease that follows the predetermined profile. These objectives stem from the need toprovide better health and convenience to patients. Prolonged drug release can providegreater compliance from patients and comfort to patients who no longer have to take thesame dosage repeatedly or several different dosages in one day to keep a certain level ofdrug concentration in the body. Therefore, patients can have better quality of life withoutthe worry of missing any doses.
The knowledge of the different transport phenomena involved in the controlled drug de-livery is a key prerequisite to develop a reliable mathematical model of the controlleddrug delivery device. Generally, the mass transport mechanisms of the controlled drugdelivery involve solvent penetration into the polymeric device, swelling of the polymer,polymer erosion, drug dissolution and drug diffusion out the device. The mathematical
10

models are useful to predict the drug release profile as a function of design parameters.Further, mathematical models can enormously simplify the task of developing new drugdelivery devices by reducing the number of required experiments either in vitro or in vivo.
There exists many mathematical models in the literature that describe drug release pro-cesses, however many of these models involve simple linear diffusion on a fixed domain toallow for exact solutions. In this research, we are interested in studying drug release frompolymeric carriers in contact with a solvent, which leads to a more sophisticated model,since the drug mobility is affected by the solvent concentration in the rubbery region ofpolymer. The polymeric carriers are initially in a glassy state and subsequently changeto a rubbery state due to the solvent penetration into the polymer. The separation ofthe two states is a mushy region and its width is comparatively small to the radius orwidth of the polymeric carrier from the observation of NMR, hence this mushy regionis treated as as sharp interface. The interface between the two states of the polymer ismodelled as a moving boundary and the speed of this interface is governed by a kineticlaw. The width of the rubbery region changes as the glassy-rubbery interface propagatesinto the polymer and the rubbery polymer may swell or even dissolve into the surroundingsolvent. The drug diffusion only happens in the rubbery region of the polymer, with anon-linear diffusion coefficient that depends on the concentration of solvent. The mathe-matical models describing these characteristics are called moving boundary problems. Inthis research, we aim to investigate mathematical models of drug release from polymericcarriers asymptotically and numerically to determine the effect of parameters on the drugrelease. We also aim to develop a general mathematical model of drug release from poly-meric carriers that contains important transport phenomena from the literature as muchas possible and accurately approximates the experimental results. The drug released fromany systems or models mentioned in this document is not confined to a particular drug.Instead, we aim to develop mathematical models of the controlled drug delivery devicesfor any generic drug.
The layout of this research is showed in Figure 1.4. This research starts with an investiga-tion of the important phenomena of drug release process and the proposed mathematicalmodels for drug release from polymeric carriers in the literature. We examine the meritsand drawbacks of these mathematical models in Chapter 2 and are specifically inter-ested in models that are based on the ideas of moving boundary problem. From this,we learn that the solvent permeation in the swelling controlled release system, ignor-ing the volume change of polymer, described by Cohen and Erneux (1988a) is a movingboundary problem. This moving boundary problem is also the one-phase Stefan problemwith kinetic undercooling governing the melting of an ice ball. Hence we investigate thisone-phase Stefan problem with kinetic undercooling asymptotically and numerically inChapter 3. When melting very small particles, it is known that surface tension effects arealso important. Therefore we extend the study in Chapter 3 with kinetic undercoolingto include surface tension and investigate this problem by using both formal asymptoticsand numerical computation in Chapter 4.
11

We turn our focus back to the drug delivery problems and use the asymptotical andnumerical skills developed in Chapter 3 to investigate the mathematical models of drugrelease from polymeric carriers. We firstly put certain approaches together to form aswelling controlled release system in Chapter 5 such as ignoring the volume change ofpolymer and including the phase change and non-linear diffusion. We then modify themodel to investigate the effect of different boundary conditions on drug release. We alsodiscuss the idea of a multi-layer matrix tablet, which consists of a number of polymerlayers designed to provide either sustainable and constant drug release or bimodal drugrelease in Chapter 5. Subsequently we investigate the swelling controlled release system(with volume change) in Chapter 6 by extending the model in Chapter 5 to a two mov-ing boundary problem. We then put certain approaches together to form two erosioncontrolled release systems for the bulk erosion and the surface erosion respectively inChapter 7. In these three chapters, we explore the models numerically and analytically,discuss the results and compare the results with with the literature. From these analyses,we hope to design mathematical models of drug release from polymeric carriers to suittherapeutic treatments in the future development by simply varying specific parametersin our models.
12

Chapter 2
Literature Review
2.1 Linear diffusion of drug from a sphere
The most simple case of drug release from a spherical polymer only considers the diffusionof the drug and neglects other mechanisms. Hence the transport mechanism of the drugwithin the spherical polymer is modelled by a linear diffusion equation and does notinvolve moving boundaries (unlike later). The model of drug release from the sphericaldrug carrier is
∂V
∂T= Dd
1R
∂2(RV )∂R2 in 0 < R < S2, (2.1)
V = 0 at R = S2, (2.2)∂V
∂R= 0 at R = 0, (2.3)
V = Vi at T = 0, (2.4)
where Dd is the diffusion coefficient of drug concentration and V is the drug concentrationin the spherical drug carrier. The model (2.1)–(2.4) based on the linear diffusion is scaledby the following non-dimensional variables
r = R
S2, t = DaT
S22, and v = V
Vi,
where Da is the diffusion coefficient of drug or some other material (depending on theapplication), S2 is the fixed radius of the spherical drug carrier and Vi is the initialconcentration of drug within the spherical drug carrier. The non-dimensional form ofEquations (2.1)–(2.4) is
∂v
∂t= δ
1r
∂2(rv)∂r2 in 0 < r < 1, (2.5)
v = 0 at r = 1, (2.6)∂v
∂r= 0 at r = 0, (2.7)
v = 1 at t = 0, (2.8)
where δ > 0 is the only dimensionless parameter herein and defined δ = Dd/Da. Thesystem (2.5)–(2.8) can be solved analytically via separation of variables or by applying a
13

Laplace transform. The exact solution is
v(r, t) = 2π
∞∑n=1
(−1)n+1
n
sin(nπr)r
e−δn2π2t, (2.9)
by using separation of variables, or
v(r, t) = 1− 1r
∞∑n=0
erfc((2n+ 1)− r
2√δt
)+ 1r
∞∑n=0
erfc((2n+ 1) + r
2√δt
), (2.10)
by using Laplace transform.
For the pharmaceutical industry, the outward flux of drug concentration at the surface ofthe polymer
−∂v∂r
∣∣∣∣r=1
= 2∞∑n=1
e−δn2π2t, (2.11)
and the normalised drug release from the polymer
mt = 4πr2∫ t
0−∂v∂r
∣∣∣∣r=1
dτ/(4π
3 r3v(r, 0)) ∣∣∣∣
r=1= −3
∫ t
0
∂v
∂r
∣∣∣∣r=1
dτ, (2.12)
provide more insight for evaluation than the profiles of drug concentration inside the drugcarrier. From the above exact solution (2.10), we find
−∂v∂r
∣∣∣∣r=1
=∞∑n=0
[ 1√πδt
e−n2δt − erfc
(n√δt
)+ 1√
πδte−
(n+1)2δt + erfc
(n+ 1√δt
)], (2.13)
and
mt = 1− 6π2
∞∑n=1
1n2 e−n2π2δt, (2.14)
= 6√δt
{1√π
+ 2∞∑n=1
[ 1√π
e−n2δt − n√
δterfc
(n√δt
)]}− 3δt. (2.15)
Equation (2.14) is a more useful form of the exact solution for moderate to large timesas the terms in the summation decay very quickly as n increases. On the other hand, forvery small times, for (2.14) to be useful, we must take more and more terms. Thus fort� 1 we could use (2.15) in practice as the summation in (2.15) converges much faster fort� 1. The solutions of v and mt are well known and appear in Crank (1980) and Carslawand Jaeger (1986), for example. The model (2.1)–(2.4) is also called the matrix system inthe diffusion-controlled release system with the initial amount of drug concentration lessthan the solubility of the drug in the polymer matrix. (i.e. Vi < Vs, where Vs is the thesolubility of the drug in the polymer matrix)
The other matrix system in the diffusion-controlled release system has the initial amountof drug concentration higher than the solubility of the drug in the polymer matrix (Vi >Vs) and is also called the dispersed matrix system. The dispersed drug system has a
14

core (non-diffusing) region and the dissolved (diffusing) region after the commencementof drug release. In the core region, the drug is undissolved and the drug concentration ofthe core region is the same as the initial drug concentration. In the dissolved region, thedrug is dissolved and diffusion takes place. The core region continuously diminishes andmore drug dissolves into the dissolved region. This ongoing process implies the occurrenceof a moving front at the interface that separates the core and the dissolved regions.
Higuchi (1963) is the first one to propose the idea of modelling the dispersed matrixsystem as a moving boundary problem and derives the amount of drug release from aplanar sheet by using a pseudo-steady state approximation :
MT = SA
∫ T
0−Dd
∂V
∂X
∣∣∣∣X=S2
dT ∼ SA√Dd(2Vi − Vs)VsT ∼ SA
√2DdViVsT , Vi � Vs,
where SA is the surface area for drug release to the surrounding. Cohen and Erneux(1988b) studied Higuchi’s model for a matrix-controlled release system which uses non-swellable polymer. The model of drug release from a planar sheet for a dispersed matrixsystem is
∂V
∂T= Dd
∂2V
∂X2 in S(T ) < X < S2, (2.16)
V = 0 at X = S2, (2.17)
V = Vs at X = S(T ), (2.18)
Dd∂V
∂X= (Vi − Vs)
dSdT at X = S(T ), (2.19)
V = Vi at T = 0. (2.20)
The model (2.16)–(2.19) is scaled by the following non-dimensional variables
x = X
S2, s = S(T )
S2, t = Dd
S22T, and v = V
Vi,
and the non-dimensional form of Equations (2.16)–(2.19) is
α∂v
∂t= ∂2v
∂x2 in s(t) < x < 1, (2.21)
v = 0 at x = 1, (2.22)
v = α at x = s(t), (2.23)∂v
∂x= (1− α)ds
dt at x = s(t), (2.24)
v = 1 at t = 0, (2.25)
where α = Vs/Vi � 1.
15

Cohen and Erneux investigate the model (2.21)–(2.24) in the limit α→ 0 asymptoticallyto find
v ∼1− x√2t√α+O(α2), and (2.26)
s ∼1−√
2tα+O(α), (2.27)
and the dimensional amount of drug release for the model (2.16)–(2.19) is
MT ∼ SA√
2DdViVsT , Vi � Vs,
which is the same as Higuchi’s result. Hence the asymptotic solution of leading order termis the same as the solution proposed by Higuchi who uses the steady state approximationapproach.
Another matrix-controlled release system investigated by Cohen and Erneux (1998) is al-most the same as Equations (2.16)–(2.19) except the constant solubility (2.18) is replacedwith a time-dependent solubility,
V = VsF (T )
at X = S(T ). They use pseudo-steady-state approximation to solve the problem for thecase of the initial drug loading which is much larger than the solubility of drug. They alsoinvestigate the difference between the initial drug loading, Vi and the maximum solubilityof the drug in the polymer, Vs, approaching zero on the drug release. They propose aparameter
β = 1α− 1→ 0,
for the problem and transform the moving boundary problem to a fixed boundary problemwith a new spatial variable. They find that the drug concentration within the polymeris approximately equal to Vs except near the boundary that separates the polymer andsolvent. Therefore they employ a singular perturbation technique and the method ofmatched asymptotic expansions to handle the boundary layer.
2.2 Swelling controlled release system
Polymer materials are important to the pharmaceutical industry and are used as drugcarriers in controlled drug release devices. Polymers are often stored in a glassy statebefore contacting with thermodynamically compatible solvent. The left drawing of Figure2.1 depicts a glassy polymer ball and the right drawing depicts a swollen polymer ball.After the solvent permeates into the polymer, parts of polymer that are near the surfacewill firstly undergo structural relaxation and then transform from the glassy state to therubbery state. Consequently, there is a volume expansion of the polymer ball. Thereforean interface forms to identify the concentration difference of solvent between the glassyand rubbery parts of polymer and this interface will move inward as the rubbery part
16

expands. This interface is often called the swelling interface or solvent-penetrant interfaceand S1(T ) is denoted as the distance from the centre of polymer ball to this interface.The other interface is named as the polymer-solvent interface or the volume expansioninterface and it will move outward due to the volume expansion of swelling process. S2(T )is denoted as the distance from the centre of polymer pill to the polymer-solvent interfaceand B is denoted as the thickness of boundary layer. However not all polymers will swellupon contacting with solvent. The swelling ability is dependent on the physicochemicalproperties of polymer and the thermal compatibility between polymer and solvent. Good(1976) experimented with the release of HCI from an insoluble and lightly cross-linkedpolymer sheet, PHEMA, to water and noted that there is virtually no thickness change ofthe slab. He ascribed this non-swelling to the balance between drug diffusion and solventabsorption.
Polymer at t = 0 Swollen polymer, t > 0
Glassy polymer Rubbery polymer Boundary layer
Solvent
S2(0)
S1(T )
S2(T ) B
.
Figure 2.1: Polymer swelling.
In the following analysis, V , U and Cp denote the concentration of drug, solvent andpolymer, respectively, and numerical subscripts are used to designate the three regions inthe system. For example, C1p, C2p and C3p are the concentrations of polymer in the glassyregion, rubbery region and boundary layer, respectively. In the swelling polymer, there isa threshold value of solvent at the solvent-penetrant interface and it is denoted as U∗2 . U∗2is the threshold value that transforms the glassy sate of polymer to the rubbery state ofpolymer and it is often used in the boundary condition at the solvent-penetrant interface.The boundary condition of solvent at the volume expansion interface is generally assumed
17

to be constant and is represented as the equilibrium solubility of solvent in the swollenpolymer, U2e.
The followings sections describe different attempts of modelling the swelling controlledrelease systems that are based on the idea of the Stefan-type moving boundary problemand the diffusion problem. The following sections also include the mathematical validationof models that use the idea of the Stefan-type moving boundary problem. If a symbol ofV , U or Cp used in the model appears without any numerical subscripts, it means themodel does not utilize the moving boundary condition of the swelling interface and theconcentration of corresponding species does not distinguish the glassy and rubbery regionin the polymer, e.g. U is the concentration of solvent in the polymer. In order to compareand analyse the work performed by different researchers, the analysis of each model iscarried out with the common dimensionless variables instead of the original ones used byeach author. We hope to determine the important phenomena of the swelling controlledrelease systems mathematically after reviewing these models.
2.2.1 Stefan models in swelling controlled drug release system
Astarita and Sarti (1978)
Astarita and Sarti (1978) summarise experimental evidences of solvent penetrating intoa glassy polymer from other researchers in the following:
(a) There is a morphological discontinuity in the polymer which partitions the glassyregion and rubbery region of polymer.
(b) The velocity of glassy-rubbery interface is initially constant in time.(c) The amount of solvent in the polymer initially increases linearly with time.(d) The activation energy for the initial velocity of glassy-rubbery interface is close to
the craze formation.(e) At intermediate times, the curve of the glassy-rubbery interface position versus time
can be fitted by a power law with an exponent ranging between 0.5 and 1.(f) Feature (c) will stop before feature (b).
They point out features (b) and (c) are “case-two-transport”, which implies the glassy-rubbery interface position is initially a linear function of time. After some finite time, theglassy-rubbery interface position is proportional to the square root of time which theyrefer as “pseudo-Fickian transport”.
Astarita and Sarti propose a mathematical model for a polymer slab exposing to solventwithout volume change which fixes the position of the polymer-solvent interface (S2 isconstant) or ignore the volume expansion due to swelling. They assume the phase tran-sition is a kinetic one and the concentration of solvent is zero in the glassy polymer.The moving boundary between the swollen (rubbery) region and the glassy region obeysan empirical penetration law which relates the velocity of the moving boundary with aempirical function of the solvent concentration. They use a simple n-order type functionto describe the kinetics of phase transition at X = S1(T ). There is another conditionat the moving boundary and it is the mass balance equation at the moving boundary,
18

which equates the mass density current to the product of the solvent concentration andthe velocity of the moving boundary. The model is
∂U2∂T
= D2∂2U2∂X2 in S1(T ) < X < S2, (2.28)
U2 = U2e at X = S2, (2.29)
U2dS1dT = −D2
∂U2∂X
at X = S1(T ), (2.30)
dS1dT = −k1 (U2 − U∗2 )n at X = S1(T ), (2.31)
S1(0) = S2 at T = 0, (2.32)
where S2 is the length of the polymer slab and k1 and n are phenomenological quantitiesthat depend on the type of solvent and polymer. Now we scale the model as
∂u2∂t
= ∂2u2∂x2 in s1(t) < x < 1, (2.33)
u2 = 1 at x = 1, (2.34)
(u2 + λ)ds1dt = −∂u2
∂xat x = s1(t), (2.35)
un2 = −µds1dt at x = s1(t), (2.36)
s1(0) = 1 at t = 0, (2.37)
where the dimensionless variables are
u2 = U2 − U∗2U2e − U∗2
, x = X
S2, s1(t) = S1(T )
S2, and t = TD2
S22. (2.38)
The two dimensionless parameters in Equations (2.33)–(2.37) are defined as
λ = U∗2U2e − U∗2
, (2.39)
and
µ = D2k1S2
1[U2e − U∗2 ]n . (2.40)
(Note that Astarita and Sarti use slightly different dimensionless variables.) Astarita andSarti investigate a modified model which has the value of n in Equation (2.36) equal tozero, and replacing Equation (2.35) with a new moving boundary condition
−∂u2∂x
= λds1dt at x = s1(t). (2.41)
This new moving boundary condition is only valid after solvent begins penetrating intothe polymer t > tcs . Also the value of u2(s1(tcs), tcs) is now equal to zero at the glassy-rubbery interface and after some finite time tcs. They utilise the idea that the influence
19

of the initial condition on parabolic equation fades away in time and therefore assumethat Equation (2.41) is valid for all time. They derive the analytic solutions
u2 = 1− erf(1− x
2√t
)/erf(m),
s1(t) = 1− 2m√t,
with 1λ = m
√πerf(m)em2
. Actually these analytic solutions are the Neumann solution ofthe classical Stefan problem documented in Crank (1987) and Vuik (1993). Astarita andSarti comment that they are unable to perform a perturbation analysis around t→∞ forthe general model with 0 < n <∞. They also comment the perturbation analysis t� 1is comparatively easy. They devise a computational program to calculate the numericalsolution of the model (2.35)–(2.36).
Fasano et al. (1986)
Fasano et al. (1986) investigate the model proposed by Astarita and Sarti (1978) (Equa-tions (2.33)–(2.37)), except Equation (2.36) is generalised to
ds1dt = f [u2(s1, t)] at s = s1(t). (2.42)
Fasano et al. assume f [u2(s1, t)] is a function which satisfies the following assumptions
f ∈ C1(0, 1], f′(c2) > 0 for c2 ∈ (0, 1], and f(0) = 0,
and let u2(s1, t) = Φ(s1(t), t) where Φ = f−1. They analyse the local and global existence,uniqueness, convexity and regularity of the solution of Equations (2.33)–(2.35) and (2.37),explore the asymptotic limits and devise a convergent numerical algorithm. The numericalmethod is the method proposed by Meyer (1977). It is the method of lines in which thepartial differential equation is replaced by a sequence of ordinary differential equationsat discrete time levels. Meyer uses the method of invariant imbedding (sweep method)to solve the ordinary differential equations. Fasano et al. suggest the Crank-Nicolsontime discretisation and a higher order Adams-Moulton space integration could be used tominimize the run times.
Cohen and Erneux (1988)
1988aCohen and Erneux (1988a) investigate two problems of polymer-penetrant systems. Theseproblems originate from the swelling-controlled release systems without considering vol-ume change, as studied by Korsmeyer and Peppas (1983).
The first problem is a polymeric film exposed to a solvent which is consisted by smallermolecule and capable to diffuse into the film. The model, based on the work by Astarita
20

and Sarti (1978),
∂U2∂T
= D2∂2U2∂X2 in S1(T ) < X < S2, (2.43)
U2 = U2e at X = S2, (2.44)
(U2 +K) dS1dT = −D2
∂U2∂X
at X = S1(T ), (2.45)
dS1dT = −k1 (U2 − U∗2 )n at X = S1(T ), (2.46)
S1(0) = S2 at T = 0, (2.47)
where K, k1 and n are phenomenological quantities. This model is almost the same as theAstarita and Sarti’s model (2.28)–(2.32) except the boundary condition (2.45) for massbalance at the moving interface. Equation (2.46) represents the swelling kinetics at theinterface, S1(T ) and indicates the velocity of the interface is dependent on the excess ofsolvent concentration at the interface over the threshold value.
Equation (2.45) is a result of mass balance at the moving interface. Cohen et al. let theflux from the swelling region across a moving boundary be
D2∂U2∂X
+ U2dS1dT ,
and assume to be proportional to the flux generated by the interface. Therefore at X =S1(T ), the mass balance equation is
D2∂U2∂X
+ U2dS1dT = k2 (U2 − U∗2 )n = −K dS1
dT ,
where K = k2/k1. Now we scale the model differently from Cohen and Erneux. Thedimensionless version of Equations (2.43)–(2.47), scaled according to the dimensionlessvariables defined in (2.38), are the same as (2.33)–(2.37), except the dimensionless pa-rameter λ which is now defined as
λ = U∗2 +K
U2e − U∗2> 0,
and is slightly different to the Equation (2.39). This difference is caused by the differentidea of applying the mass balance at the swelling interface.
Cohen et al. investigate the model asymptotically by firstly transforming the dimension-less model to the fixed boundary problem. An independent spatial variable
y = x− s1(t)1− s1(t) ,
is introduced.
21

The fixed boundary version of the dimensionless model is
(1− s1(t))2
λ
∂u2∂t
= ∂2u2∂y2 + (1− y)(1− s1(t))
λ
ds1(t)dt
∂u2∂y
in 0 < y < 1, (2.48)
u2 = 1 at y = 1, (2.49)∂u2∂y
= −1λ
(u2 + λ)(1− s1(t))ds1(t)dt
at y = 0, (2.50)
un2 = −µλ
ds1(t)dt
at y = 0, (2.51)
s1(0) = 1, at t = 0, (2.52)
where we use the new temporal variable t = t/λ. The dimensionless asymptotic solutionfor small time is investigated by expanding u2 and (1 − s1(t))′ = d(1 − s1(t))/dt in apower series for small (1− s1(t)) in Equations (2.48)–(2.52). Cohen et al. derive
u2 = 1− λ
µ
(1 + 1
λ
)(1− x) +O
((1− s1(t))2
)in s1(t) < x < 1,
and s1(t) = 1− 1µt+ λ
µ3n
2 (1 + 1λ
)t2 +O(t3),
which are presented in terms of original dimensionless variables here for the purpose ofcomparison.
Cohen et al. comment as t → ∞, the effect of the interface kinetics on the solventconcentration becomes negligible and the behaviour of solvent concentration in the swollenphase is now mainly Fickian are both reasonable assumptions.
Hence the dimensionless asymptotic solutions for long time are
u2 = 1− erf( 1− xγ(1− s1(t))
)/erf
(1γ
)+O
((1− s1(t))−1/n
)in s1(t) < x < 1,
and t = λ
E0(1− s1(t))2 +O((1− s1(t))2−1/n),
where γ is defined as γ = 2(E0/λ)−1/2, E0 is defined as E0 = 2 − 2/3λ + O(1/λ2) when1/λ → 0 and E0 is defined as E0 ∼ 4(ln 1/λ)/λ when 1/λ → ∞. The complete timeevolution of the solvent concentration and moving front for large λ by expanded u2 and1− s1(t) in power series for large λ are
u = λ
µ
1− x√1 + 2λ
µ2 t+ 1 +O
( 1λ
),
s1 = 1− µ
λ
(1−
√1 + 2λ
µ2 t
)+O
( 1λ
),
for the case n = 1.
The second problem considered by Cohen and Erneux (1988a) is a polymeric film which isexposed initially to a finite amount of solvent and then the polymer boundary is insulatedafterward. This problem is different from the first problem by the boundary condition
22

and initial conditions. Cohen et al. investigate the second problem for large and small λand a new asymptotic limit related to the diffusion coefficient.
1988b
Cohen and Erneux (1988b) investigated two problems of the controlled drug release sys-tems. Cohen and Erneux first study Higuchi’s model for a matrix-controlled releasesystem which uses non-swellable polymer. Cohen et al. investigate this problem asymp-totically for an asymptotic limit which is approaching zero. The leading order term oftheir asymptotic solution is actually the same as the solution proposed by Higuchi whouses the steady state approximation approach.
The second problem investigated by Cohen and Erneux (1988b) is the drug release froma swelling controlled release system. In this problem, the model proposed by Higuchi(1961) and Higuchi (1963) is used to describe the drug transport and the model proposedby Astarita and Sarti (1978) is used to describe the solvent transport. The resultantmodel has two moving boundaries which move in opposite directions. It is
∂U2∂T
= D2∂2U2∂X2 in S1(T ) < X < S2(T ), (2.53)
U2 = U2e at X = S2(T ), (2.54)
(U2 +K) dS1dT = −D2
∂U2∂X
at X = S1(T ), (2.55)
dS1dT = −k1 (U2 − U∗2 )n at X = S1(T ), (2.56)
and
∂V2∂T
= D2d∂2V2∂X2 in S1(T ) < X < S2(T ), (2.57)
V2 = 0 at X = S2(T ), (2.58)
(V2 − V2i)dS1dT = −D2d
∂V2∂X
at X = S1(T ), (2.59)
S1 = S2 at T = 0, (2.60)
with the result of volume expansion,
S2(T )− S2(0) = ν
∫ S2(T )
S1(T )
[U2(X ′ , T )
]dX ′ , (2.61)
where ν is the molar volume of the solvent. This model is similar to the model proposedby Peppas et al. (1980) and the differences between these two models are the boundaryconditions at moving boundaries and drug diffusion in the glassy part of the polymer.Cohen et al. assume no kinetics of drug in the glassy part of the polymer. Peppas et al.(1980) used the Dirichlet boundary condition and the idea of continuity at the glassy-rubbery interface for drug and insulate boundary condition at glassy-rubbery interfacefor solvent.
23

We scale the model differently from Cohen and Erneux by introducing the six dimension-less variables
u2 = U2 − U∗2U2e − U∗2
, v2 = V2V2i
, x = X
S2(0) ,
s1(t) = S1(T )S2(0) , s2(t) = S2(T )
S2(0) , and t = TD2S2
2(0).
The dimensionless model is
∂u2∂t
= ∂2u2∂x2 in s1(t) < x < s2(t), (2.62)
u2 = 1 at x = s2(t), (2.63)∂u2∂x
= −(u2 + λ)ds1dt at x = s1(t), (2.64)
un2 = −µds1dt at x = s1(t), (2.65)
and
∂v2∂t
= δ∂2v2∂x2 in s1(t) < x < s2(t), (2.66)
v2 = 0 at x = s2(t), (2.67)
(v2 − 1) ds1dt = −δ ∂v2
∂xat x = s1(t), (2.68)
s1 = s2 = 1 at t = 0, (2.69)
with
s2(t)− 1 = ν(U∗2 +K)∫ s2(t)
s1(t)
[U∗2
U∗2 +K+ 1λu2
]dx′ . (2.70)
In this model the process of solvent and drug diffusion are only coupled in one direction,in the sense that the double moving boundary problem of u2 does not depend on v2.Given solutions for u2, s1(t), and s2(t), the problem of v2 is solved. In order to deliver anapproximation solution for λ � 1, a new independent time variable is introduced whichis t = t/λ, and Equations (2.62)–(2.70) are now transformed to
∂u2∂t
= λ∂2u2∂x2 in s1(t) < x < s2(t), (2.71)
u2 = 1 at x = s2(t), (2.72)∂u2∂x
= −( 1λu2 + 1
) ds1dt
at x = s1(t), (2.73)
un2 = −µλ
ds1dt
at x = s1(t), (2.74)
and
24

∂v2∂t
= λδ∂2v2∂x2 in s1(t) < x < s2(t), (2.75)
v2 = 0 at x = s2(t), (2.76)1λ
(v2 − 1) ds1dt
= −δ ∂v2∂x
at x = s1(t), (2.77)
s1 = s2 = 1 at t = 0, (2.78)
with
s2(t)− 1 = ν(U∗2 +K)∫ s2(t)
s1(t)
[U∗2
U∗2 +K+ 1λu2
]dx′ . (2.79)
A new spatial variable y is introduced to replace x and is defined as
y = x− s1(t)s2(t)− s1(t)
.
The variables u2, v2, s1(t) and s2(t) are expanded in a power series for large λ andsubstituted into Equations (2.75)–(2.79) with a new spatial variable y. Cohen et al.derive u2 and v2 as
u2(x, t) = F (t)(
x− s1(t)s2(t)− s1(t) − 1
)+ 1 +O
( 1λ
),
s10(t) = 1 + (1− νU∗2 )µλ−
√[µ
λ(1− νU∗2 )
]2+ 2(1− νU∗2 ) 1
λt,
s20(t) = 1− νU∗2 s10(t)1− νU∗2
,
v2(x, t) = 1λG(t)
(x− s1(t)
s2(t)− s1(t) − 1)
+O
( 1λ2
),
with
F (t) = − [s20(t)− s10(t)] s′10(t),
G(t) = D2D2d
(s20 − s10)s′10,
for n = 1.
Hu (1991)
Hu (1991) studied the asymptotic solution of a diffusive solvent penetrating into a glassypolymer and the model is obtained from the first problem of Cohen and Erneux (1988a).Hu explored the short and long time behaviour of the model and his results confirm theresults derived by Cohen and Erneux (1988a), by using auxiliary problems which aresimilar to the model and may have analytic solutions. Hu investigated the complete timeevolution of the moving front and the solvent concentration for small 1/λ by expandingu2 and s2 − s1(t) in a power series for small 1/λ. Hu proved the convergence of the
25

asymptotic solution of u2 and s2 − s1(t) for large λ to the corresponding leading orderterms. Hu also proved the asymptotic solution of s2 − s1(t) = 0 when 1
λ → ∞. LastlyHu investigated the effects of n → ∞ and n → 0 and showed the asymptotic solution ofs2 − s1(t) = 0 when n→∞ and a critical value of time, T ∗ on s2 − s1n(t) when n→ 0.
Lin and Peng (2001)
Lin et al. (2001) investigated a model of the solvent penetration in a spherical polymerbut the model is really the spherical version of the model (2.43)–(2.47) proposed by Cohenand Erneux (1988a). The model is
∂U2∂T
= D21R
∂2(RU2)∂R2 in S1(T ) < R < S2,
U2 = U2e at R = S2,
(U2 +K) dS1dT = −D2
∂U2∂R
at R = S1(T ),
dS1dT = −k1 (U2 − U∗2 )n at R = S1(T ),
S1(0) = S2 at T = 0.
After non-dimensionalising dimensional variables similarly as in (2.38) and introducinga temporal variable and a spatial variable to the model, Lin and Peng investigated themodel asymptotically for small time. Lin et al. derive,
u2(r, t) = 1− λ
µ(1 + 1
λ)(1− r)
r+O
([1− s1(t)]2
)in s1(t) < r < 1,
s1(t) = 1− t
µ+n(1 + 1
λ)2µ2 t2 +O
(t3).
We will improve on these small time approximate solutions in Chapter 3.
Lin and Peng (2005)
Lin and Peng (2005) investigated a swelling-controlled release model from a sphericaldrug carrier however the model is actually the spherical version of the model (2.62)–(2.70) proposed by Cohen and Erneux (1988b). The model is
∂U2∂T
= D21R
∂2(RU2)∂R2 in S1(T ) < R < S2(T ), (2.80)
U2 = U2e > U∗2 at R = S2(T ), (2.81)
(U2 +K) dS1dT = −D2
∂U2∂R
at R = S1(T ), (2.82)
dS1dT = −k1 (U2 − U∗2 )n at R = S1(T ), (2.83)
and
26

∂V2∂T
= D2d1R
∂2(RV2)∂R2 in S1(T ) < R < S2(T ), (2.84)
V2 = 0 at R = S2(T ), (2.85)
(V2 − V2i)dS1dT = −D2d
∂V2∂R
at R = S1(T ), (2.86)
S1 = S2 at T = 0, (2.87)
and with the result of volume expansion,
S32(T )− S3
2(0) = 3ν∫ S2(T )
S1(T )U2(R, T )R2dR, (2.88)
where ν is the molar volume of the solvent and S2(0) is the initial radius of sphere. Wenow scale the model differently from Lin et al. as
∂u2∂t
= 1r
∂2(ru2)∂r2 in s1(t) < r < s2(t), (2.89)
u2 = 1 at r = s2(t), (2.90)∂u2∂r
= −(u2 + λ)ds1dt at r = s1(t), (2.91)
un2 = −µds1dt at r = s1(t), (2.92)
and
∂v2∂t
= δ1r
∂2(rv2)∂r2 in s1(t) < r < s2(t), (2.93)
v2 = 0 at r = s2(t), (2.94)
(v2 − 1) ds1dt = −δ ∂v2
∂rat r = s1(t), (2.95)
s1 = s2 = 1 at t = 0, (2.96)
with
s32(t)− 1 = ν(U∗2 +K)
∫ s2(t)
s1(t)
(U∗2
U∗2 +K+ 1λu2
)r2dr, (2.97)
by introducing six dimensionless variables which are
u2 = U2 − U∗2U2e − U∗2
, v2 = V2V2i
, t = TD2S2
2(0),
r = R
S2(0) , s1(t) = S1(T )S2(0) , and s2(t) = S2(T )
S2(0) .
As before, a new independent time variable is introduced which is t = t/λ, and Equa-tions (2.93)–(2.97) are transformed accordingly. The variables u2, v2, s1(t) and s2(t) areexpanded into a power series of large λ to investigate them asymptotically. Lin et al.
27

derived u2 and v2 asymptotically and they are
v2(r, t) = − 1λ
D2D2d
(1r− 1s20(t)
)s2
10(t)ds10dt +O
( 1λ2
),
u2(r, t) = 1 + s210(t)ds10
dt
(1r− 1s20(t)
)+O
( 1λ
),
with ds10dt = −
[1 + s2
10ds10dt
( 1s10− 1s20
)]n λµ,
s320(t)− 1 = νU2e
(s3
20(t)− s310(t)
),
where s10 and s20 are the leading order term of s1 and s2 in power series for large λ andcan be solved numerically by using Newton-Raphson iteration with Equation (2.96) whenthe value of n is known.
2.2.2 Diffusion models in swelling controlled release system
Peppas et al. (1980)
Peppas et al. (1980) proposed a model of the swelling controlled release system which takesthe glassy and rubbery parts of the polymer into account. The main release mechanismof their model is the diffusion but the idea of a moving boundary due to the swelling isalso used in the model. Peppas et al. used KCI as a drug, hydroxypropyl methyl cellulose(HPMC) as polymer matrices and water as a solvent for the drug release experiment asa comparison with their model. The diffusion coefficient of a drug in the rubbery part ofthe polymer is a function of solvent concentration in the polymer. However, due to thehigh solvent content in the rubbery part of the polymer they assumed a constant averagediffusion coefficient in the rubbery polymer. They also assumed the solvent only existsin the rubbery part of the polymer and in the external environment. The drug model inthe glassy part of the polymer is
∂V1∂T
= D1d∂2V1∂X2 in 0 < X < S1(T ),
∂V1∂X
= 0 at X = 0,
V1 = V2 = Vs at X = S1(T ),
D1d∂V1∂X
= D2d∂V2∂X
at X = S1(T ),
V1 = Vi at T = 0,
the drug model in the rubbery part of the polymer is
∂V2∂T
= D2d∂2V2∂X2 in S1(T ) < X < S2(T ),
V2 = 0 at X = S2(T ),
S1 = S2 at T = 0,
and the solvent model in the rubbery part of the polymer is
28

∂U2∂T
= D2∂2U2∂X2 in S1(T ) < X < S2(T ),
U2 = U2e at X = S2(T ),∂U2∂X
= 0 at X = S1(T ),
S2(T )− S2(0) = ν
∫ S2(T )
S1(T )U2dX at X = S1(T ),
where Vs is the solubility of the drug in the swollen polymer, Vi is the initial amount ofdrug in the polymer, ν is the molar volume of the solvent. This model is similar to themodel (2.62)–(2.70) proposed by Cohen and Erneux (1988b) except for the drug diffusionin the glassy part of the polymer. After non-dimensionalisation, Peppas et al. obtainedthe steady state solutions of the model by assuming that D1d/D2d and D1d/D2s approachzero. They claim their model can accurately predict the drug and solvent concentrationsin the polymer for most of the time except the initial time of release when they comparetheir model to the experiment result.
Peppas et al. (1986)
Korsmeyer et al. (1986) proposed a model for the swelling controlled release system andutilised concentration dependence of diffusion coefficients. The model does not make thedistinction between the glassy and rubbery parts of the polymer and it is
∂V
∂T= ∂
∂X
(Ddse−βd(1−U/Ue) ∂V
∂X
)in 0 < X < S2(T ),
V = 0 at X = S2(T ),∂V
∂X= 0 at X = 0,
V = Vi at T = 0,
and
∂U
∂T= ∂
∂X
(Dse−βs(1−U/Ue)
∂U
∂X
)in 0 < X < S2(T ),
U = Ue at X = S2(t),∂U
∂X= 0 at X = 0,
U = 0 at T = 0,
where Ue is the equilibrium concentration of the solvent in the polymer, Vi is the initialconcentration of drug in the polymer, Ds is the diffusion coefficient of solvent in the fullyswollen polymer, Dds is the diffusion coefficient of drug in the fully swollen polymer andβs and βd are parameters, characterizing the concentration dependence.
This model is simpler than the one proposed by Peppas et al. (1980) but has the solventdependent diffusivities which is also used in Siepmann et al. (1999). They solved the
29

model numerically using finite difference methods and studied the model for differentscenarios.
Peppas and Lee (1987)
Lee and Peppas (1987) investigated the solvent penetration of the swelling controlledrelease system based on the Fickian equation with very small initial film thickness. Thisviewpoint is also supported by Hopfenberg (1978) who considered the polymer dissolutionin the model, and the model is
∂U2∂T
= D2∂2U2∂X2 in S1(T ) < X < S2(T ),
U2 = U∗2 at X = S1(T ),
−D2∂U2∂X
= U2dS1dT at X = S1(T ), T < Tc,
∂U2∂X
= 0, at X = S1(T ), T > Tc,
S1 = S2 at T = 0,
D2∂U2∂X− kC2pe = (U2 + C2p)
dS2dT at X = S2(T ),
where C2pe is the equilibrium polymer volume fraction at the moving boundary S2(T )and k is a dissolution/mass transfer coefficient for the polymer. This model has twoboundary conditions at the swelling interface hence it is similar to the solvent penetrationpart in the model (2.62)–(2.70) proposed by Cohen and Erneux (1988b). After non-dimensionalisation, Lee and Peppas used a pseudo-steady state assumption to obtain theapproximate analytical solutions which implies the volume fraction of solvent is a linearfunction of space variable after a certain period of time. Therefore they obtained the
S2(T )− S1(T ) '√
2(2− U∗2 )(U∗2 − C2pe)D2T
(1− U∗2 ) ,
and compared this model with experimental results.
The above two sections review and discuss different mechanistic models of the swellingcontrolled drug release system. In contrast to mechanistic models, the other popularmodelling approach is the empirical model which quantifies the drug release withoutusing the exact description of the involved chemical and physical phenomena. In practiceempirical models are generally less accurate than the mechanistic models but easier touse. Generally empirical models describe the normalised amount of drug released fromthe polymeric network, mt, via the power law of time such as t1/2, t and combinationof tn from the review papers Siepmann and Goĺpferich (2001), Lin and Metters (2006),and Arifin et al. (2006). Some empirical models exhibit the zero order release which isdmt/dt is constant and is favoured by the pharmaceutical industry due to the controlon the dose. The empirical models are also developed in the erosion controlled releasesystem. Besides the power law of time, the exponential function of time is also usedto describe the normalised amount of drug released from the polymeric network in the
30

erosion controlled release system. However we only focus on the mechanistic models ofthe erosion controlled release system in the next section.
2.3 Erosion controlled release system
Erosion is the main feature for degradable polymers in the biomedical applications. Uponcontact with thermo-compatible solvent, the backbone of the polymer is mostly brokenby hydrolysis or other chemical reactions that depend on the type of solvent and polymerconstituents. The polymer then gradually degrades and eventually disappears into itssurroundings via the diffusion of the monomers which are the products of the erosionreaction. The two types of polymer erosion are bulk erosion and surface erosion. Bulkerosion means the polymer undergoes the erosion homogeneously because the rate ofsolvent diffusion in the polymer is faster than the rate of polymer degradation in thepolymer. Therefore, the rate of polymer degradation is roughly the same over the entirepolymer. On the other hand, surface erosion is heterogeneous. The polymer undergoingthe surface erosion is less hydrophilic than the polymer undergoing bulk erosion. Therate of polymer degradation in surface erosion is faster than the rate of solvent diffusionin the polymer. Hence, the erosion starts from the surface of the polymer and the solventonly penetrates into the polymer exterior.
In terms of hydrogel, the hydrophilic polymer swells and forms a gel layer when thethermodynamically compatible solvent diffuses into the polymer. The polymer chainsdisentangle in the gel layer and start to diffuse after an induction time at the surface ofthe polymer where the polymer chains are diluted enough. Therefore hydrogel has thefeature of swelling and surface erosion. The following reviews document models of theerosion controlled release systems that involve bulk erosion and surface erosion. Againwe hope to determine the important phenomena of the erosion controlled release systemsmathematically after reviewing these models.
2.3.1 The surface erosion
Devotta et al. (1994) proposed a model of polymer dissolution from a polymeric sphereand the model is categorised as surface erosion because the radius of the polymeric spherereduces with time. The model does not involve the drug and it is
∂U
∂T= 1R2
∂
∂R
(R2D
∂U
∂R
)− 1R2
∂
∂R
(R2VsU
)in 0 < R < S2(T ),
U = Ue > U∗ at R = S2(T ),∂U
∂R= 0 at R = 0,
dS2dT = D
∂U
∂R
∣∣∣∣R=S−2
− Dps
Cpe
∂Cp∂R
∣∣∣∣R=S+
2
at R = S2(T ),
Dps∂Cp∂R
= 0 at R = S+2 (T ), T < Trept,
−Dps∂Cp∂R
= KdCpe at R = S+2 (T ), T > Trept,
31

where Vs is the local swelling rate, Dps is the diffusivity of the polymer in the solvent, Cpeis the equilibrium value of polymer in the solvent, and Kd is the constant disengagementrate. The model does not make the distinction between the glassy and rubbery parts inthe polymer because Devotta et al. (1994) assumed the transition process from the glassystate to the rubbery state is rapid. Devotta et al. (1994) proposed a reptation time Trept
which is the minimum time that a polymer chain requires to reptate out of the entangledswollen network and diffuse itself and define Vs as equal in magnitude but opposite indirection to the local flux of solvent. When the value of Cp is equal to Cpe, the flux ofpolymer at R = S+
2 (T ) is equal to
−Dps∂Cp∂R
= Ks(Cpe − Cpb), (2.98)
where Ks is the liquid side mass transfer coefficient and Cpb is the polymer in the bulk.Devotta et al. (1994) obtained two values of D as 1× 10−6cm2/s and 4× 10−6cm2/s andtwo values of Dps as 3 × 10−7cm2/s and 2.2 × 10−7cm2/s from the experimental datapublished by other researchers.
Narasimhan and Peppas (1996a) proposed a model of polymer dissolution that only in-volves solvent and polymer molecules. The model is classified as surface erosion andis
∂U
∂T= ∂
∂X
(D2
∂U
∂X
)in 0 < X < S2(T ),
U = Ue at X = S2(T ),∂U
∂X= 0 at X = 0,
U = Ui at T = 0,
and
∂C3p∂T
= ∂
∂X
(D3p
∂C3p∂X
)− dS2
dT∂C3p∂X
in S2(T ) < X < S2(T ) + δb,
C3p = 0 at T = 0,
C3p = 0 at X = S2(T ) + δb,
Dp∂C3p∂X
= 0 at X = S+2 (T ), 0 < T < Trept,
−Dp∂C3p∂X
= Kd at X = S+2 (T ), T > Trept,
dS2dT = D2
∂U
∂X
∣∣∣∣X=S−2 (T )
− D3pUe
∂C3p∂X
∣∣∣∣X=S+
2 (T )at X = S2(T ).
Narasimhan and Peppas solved the model numerically and found the dissolution mecha-nism is affected by the polymer molecular weight. However, Narasimhan and Peppas didnot present the parameter value in the model.
Narasimhan and Peppas (1997a) proposed a one-dimensional model of drug release thatincludes the effect of polymer dissolution. They use a water soluble, crystalline drug in
32

their model and the drug is loaded into an amorphous, uncrosslinked and linear polymerfilm. The model includes the solvent, polymer and drug and the model is
∂U
∂T= ∂
∂X
(D∂U
∂X
)in S1(T ) < X < S2(T ),
U = 0 at T = 0,
U = U∗ at X = S1(T ),
−D∂U
∂X−Dd
∂V
∂X= (U + V ) dS1
dT at X = S1(T ),
∂U
∂X= 0 at X = 0,
U = Ue at X = S2(T ),
and
∂V
∂T= ∂
∂X
(Dd
∂V
∂X
)in S1(T ) < X < S2(T ),
V = Vi at T = 0,
V = V ∗ at X = S1(T ),
V = Ve at X = S2(T ),
with
∂C3p∂T
= ∂
∂X
(D3p
∂C3p∂X
)− dS2
dT∂C3p∂X
in S2(T ) < X < S2(T ) + δb,
C3p = 0 at T = 0,
C3p = 0 at X = S2(T ) + δb,
D3p∂C3p∂X
= 0 at X = S+2 (T ), 0 < T < Trept,
−D3p∂C3p∂X
= Kd at X = S+2 (T ), T > Trept,
where U∗ and V ∗ are the thermodynamic conditions of solvent and drug at the glassy-rubbery interface, Ue and Ve are the equilibrium solvent and drug volume fractions at thepolymer-solvent interface, and Vi is the initial amount of drug in the polymer. U∗ andV ∗ are determined by free volume theory. Ue and Ve are estimated from relative Flory-Rehner equations. Trept is the reptation time and is the minimum time that polymerchains require to disentangle and diffuse.
This model is similar to the model (2.62)–(2.70) proposed by Cohen and Erneux (1988b)except the polymer diffusion in the boundary layer. As time passes over reptation time,the rate of polymer diffusion is sufficiently high and Kd is used for the chain disentan-glement rate at X = S2(T ). As time passes, the polymer concentration increases in theboundary layer and the rate of polymer diffusion is insufficient to transport disentangledpolymer chains.
33

Therefore, the the boundary condition at X = S2(T ) is
C3p = C3pe at X = S2(T ), T > Trept, (2.99)
where C3pe is the equilibrium volume fraction of a polymer at the polymer-solvent inter-face. The speed of polymer-solvent interface is
dS2dT = DUe
Ue + Ve
∂U
∂X+ DdVeUe + Ve
∂V2∂X− D3pUe + Ve
∂C3p∂X
.
They solved the model at the steady state that is based on the approximation of linearprofile of components in the swollen polymer. They claimed the agreement between theexperimental data and the model prediction is very good. In their experiments, they usedtwo different drugs, cimetidine hydrochloride and diprophylline and the respective valuesof Dd are 1.3×10−6 and 1.5×10−6 cm2/s according to Takigawa et al. (1990). They alsoused water as the solvent for both cases and the value of D is 1.5× 10−5 cm2/s and thechain disentanglement rate, Kd is 2× 10−5 cm/s.
Siepmann et al. (1999) proposed a two-dimensional model of drug release that includesthe effect of polymer dissolution. The model includes the solvent, drug and polymer andthe model is
∂V
∂T= ∂
∂R
(Dd
∂V
∂R
)+ Dd
R
∂V
∂R+ ∂
∂Z
(Dd
∂V
∂Z
)V = Vi in 0 < R < S2(0), 0 < Z < Z2(0), T = 0,
V = 0 in 0 < R < S2(T ), Z = Z2(T ),
V = 0 in 0 < Z < Z2(T ), R = S2(T ),∂V
∂Z= 0 in 0 < R < S2(T ), Z = 0,
∂V
∂R= 0 in 0 < Z < Z2(T ), R = 0,
and
∂U
∂T= ∂
∂R
(D∂U
∂R
)+ D
R
∂U
∂R+ ∂
∂Z
(D∂U
∂Z
)U = 0 in 0 < R < S2(0), 0 < Z < Z2(0), T = 0,
U = Ue in 0 < R < S2(T ), Z = Z2(T ),
U = Ue in 0 < Z < Z2(T ), R = S2(T ),∂U
∂Z= 0 in 0 < R < S2(T ), Z = 0,
∂U
∂R= 0 in 0 < Z < Z2(T ), R = 0,
with the polymer dissolution characterised by mass loss as
MpT = Mp0 −KdissATT,
34

where Mpt is the mass of the dry matrix at time T , Mp0 is the mass of the dry matrixat t = 0, AT is the surface area of the system at time T and Kdiss is the dissolutionrate constant. The volume of the carrier is determined numerically at each time step bysumming the total concentration of drug, solvent and polymer that still remain in thecarrier.
Siepmann and Peppas (2000) improved the model proposed by Siepmann et al. (1999) byadopting inhomogeneous swelling of polymer networks (the sequential layer model) andincluded poorly water-soluble drugs and high initial drug loadings. The new assumptionused by Siepmann and Peppas is the rate of drug dissolution within the polymer is fasterthan the rate of the drug diffusion. The polymer swelling now occurs layer by layerfrom the surface of polymer network towards the centre and this is done numerically bymodifying the structure of the grid.
Wu et al. (2005) proposed a two-dimensional model of drug release that includes the effectof polymer dissolution and the model is similar to the model in Siepmann et al. (1999).Wu et al. (2005) used the concentration-dependent diffusivities and derived an equationfor the continuously varied volume which is
2πs22z2 = 2
ρv
∫ z2
0
∫ s2
0v2πrdrdz + 2
ρu
∫ z2
0
∫ s2
0u2πrdrdz+
1ρp
(mpi −
∫ t
0Kp(2πs2
2 + 2πs2z2dt),
where ρi is the density of solvent (i=u), drug (i=v) or polymer (i=p) and mpi is the initialmass of the polymer. They solved the model numerically using a front-fixing method andcompared this model with experimental results in different scenario.
2.3.2 The bulk erosion
Charlier et al. (2000) proposed a drug release model for a degradable slab and the model isbulk erosion without a moving boundary. Charlier et al. (2000) used pseudo steady-stateapproximation to model the drug release and modelled the loss of polymer mass as
dMp
dt = −KpMp,
where Mp is the polymer molecular weight and kp is the constant of degradation rate.They also postulated that the diffusion coefficient of drug depends on the polymer molec-ular weight and the diffusion coefficient of drug is
Dd(T ) = DdeKpT .
The idea of linking the diffusion coefficient of drug and the polymer molecular weighttogether is also supported by Faisant et al. (2006) who proposed an equation of drugrelease from spherical device that undergoes bulk erosion. In addition, several researchershave modelled the bulk erosion by reaction-diffusion and they are Lyu et al. (2005),Prabhu and Hossainy (2007), Han and Pan (2009),Rothstein et al. (2009) etc.
35

2.4 Conclusion
Many models have been proposed to describe the drug release from the swelling controlledrelease system and the erosion controlled release system, however only a few modelsmechanistically account for the physicochemical phenomena during the drug release. Themajority of the proposed models are based either on the diffusion problem with fixedboundaries or the empirical equations that describe the drug release even though thoseauthors acknowledge the existence of the moving boundaries.
In the swelling controlled release system, Astarita and Sarti (1978) are the first to de-scribe the complex process of solvent penetration that transforms the glassy polymer intothe rubbery polymer. Cohen and Erneux (1988a) investigate the model proposed by As-tarita and Sarti (1978) with a different mass balance equation at the swelling interfaceasymptotically for the small time and long time and in the limit of large λ. The sphericalversion of Cohen and Erneux (1988a)’s model is actually an extension of a well-studiedStefan problem for melting a ball. We investigate this Stefan problem asymptotically forthe small time and in the limit of large λ for different time scales in Chapter 3. We fur-ther investigate this Stefan problem that includes both kinetic undercooling and surfacetension asymptotically and numerically in Chapter 4.
Cohen and Erneux (1988b) include the drug diffusion within the polymer into the swellingmodel and investigate the model asymptotically. The idea of modelling the transition fromthe glassy polymer to the rubbery polymer during the drug release is also supported byPeppas et al. (1980) and Lee and Peppas (1987). Therefore we investigate two models ofthe swelling controlled release system that involves three attributes in Chapter 5 and 6asymptotically and numerically. The three attributes are the process of transforming theglassy polymer into the rubbery polymer, the swelling property and the concentrationdependent diffusion coefficient for drug which is used in Korsmeyer et al. (1986) andSiepmann et al. (1999). Additionally we investigate a multi-layered device of the swellingcontrolled release system in Chapter 5.
In the erosion controlled release system, most researchers propose an empirical equationto describe the drug release. From reviewing Devotta et al. (1994), Narasimhan andPeppas (1996a), Narasimhan and Peppas (1997a) and Wu et al. (2005), we learn that thesurface erosion can be described mathematically through the speed of the erosion front.Hence we incorporate this idea into the model of the swelling controlled release system andformulate a surface erosion model in Chapter 7. We also use the idea of time dependentdiffusivity in Charlier et al. (2000) to formulate a bulk erosion model in Chapter 7.
Lastly, the values of the parameters used in the dimensional models (Chapters 5-7) of thisthesis are given in Table 2.1. The definition of each parameter is given in Chapters 5-7.
36

Parameter Estimated values Units Referencesβ∗d 0− 20 Dimensionless (b), (d), (e), (f), (g), (h) and (i)Dv 0.83× 10−10 − 10−5 cm2/s (b), (d), (e), (f), (g), (h) and (i)S2 0.35− 0.7 cm (d),(h) and (i)D 1.9× 10−10 − 1.56× 10−5 cm2/s (b), (d), (g), (h) and (i)Ue 0.042− 0.375 mol/cm3 (d) and (h)U∗ 0.019 mol/cm3 (c) and (h)k1 2× 10−3 − 2.76× 10−2 cm
s · ( cm3ofpolymermolofsolvent )n (a) and (h)
n 1− 3 Dimensionless (a) and (h)νm(water) 18.016 cm3/mol (a) and (h)
kB 8.56× 10−7 − 1.45× 10−6 s−1 (j) and (k)KS 3.25× 10−8 − 5.87× 10−7 cm/s (d) and (i)
Table 2.1: Parameters in the dimensional models. References refer to: (a) Astarita andSarti (1978), (b) Narasimhan and Peppas (1997a), (c) Colombo et al. (1999), (d) Siepmannet al. (1999), (e) Siepmann and Peppas (2000), (f) Siepmann et al. (2000), (g) Radu et al.(2002), (h) Kiil and Dam-Johansen (2003), (i) Wu et al. (2005), (j) He et al. (2005), (k)Lao et al. (2009).
37

Chapter 3
A one-phase Stefan problem with kinetic undercooling
Problems of heat conduction involving a change of phase have received considerable inter-est in the past three decades. One particular scenario involves a spherical ice ball whichis initially at its melting point and is placed in an environment that is maintained ata higher temperature. As a result, the ice ball starts to melt and a moving solid-meltinterface separates the ice and water. This problem is considered as a one-phase movingboundary problem because there is no heat flow in the solid phase (the temperature of thesolid phase is at melting point initially and remains at melting point) and is the so-calledclassical one-phase Stefan problem. The assumptions made to simplify the modelling ofthis problem include neglecting effects of gravity, surface tension and kinetic undercoolingand assuming the values of all coefficients used to characterise the two phases are con-stant and the same in both phases. This problem (and the equivalence of this problem,the inward solidification of a sphere) has been considered in the past by a number ofauthors using both analytical and numerical tools (see below for specific references), witha particular focus on the complicated behaviour in the limit that the solid-melt interfaceapproaches the centre of the ball. One result of interest here is that both the interfacespeed and the heat flux develop unphysical singularities in this limit.
In the present chapter we generalise the classical one-phase Stefan problem for a sphereby including the effects of kinetic undercooling. From a Stefan problem perspective,the motivation is to study the question of whether the addition of a small amount ofkinetic undercooling in the model acts to regularise the unphysical singularities in thelimit that that the interface approaches the centre. From a drug diffusion perspective,our motivation for studying this model is that it is the same model that we use in Chapter5 for the diffusion of solvent into a glassy polymer, and the basis for similar models insubsequent chapters. Many of the numerical and asymptotic results treated in the presentchapter will be used in later Chapters.
We begin this chapter in Section 3.1 by briefly reviewing some past studies of the classicalone-phase Stefan problem and the modified problem with kinetic undercooling. These twomoving boundary problems are solved numerically using a front-fixing transformation to-gether with an appropriate spatial discretisation in Section 3.2. In Section 3.3 and 3.4, weprovide asymptotic analyses of the one-phase Stefan problem with kinetic undercoolingfor early melting and large Stefan number limit. In the small time analysis, we observe the
38

transition to a completely different qualitative behaviour as the important kinetic param-eter vanishes. This transition has important implication for drug diffusion, as discussedin Chapter 5. For the large Stefan number limit, we extend the analysis by matchedasymptotics in order to handle the case that the moving solid-melt boundary approachesthe centre of the sphere. We then compare these two problems numerically and show thatthe singularity at the complete melting time is indeed suppressed (or regularised) by theinclusion of kinetic undercooling. Therefore the one-phase Stefan problem with kineticundercooling provides physically more realistic solutions for a melting problem than theclassical one-phase Stefan problem.
3.1 Introduction
3.1.1 Classical problem
A spherical ice ball of radius a∗ is held in a container and is initially kept at its meltingtemperature U∗. A temperature U0 > U∗ is then imposed at the surface of the ice balland maintained until the ball is melted completely. Thus the ice ball starts to melt anda moving solid-melt boundary R = S(T ) moves towards the centre of the ice ball. Latentheat is absorbed at the moving boundary to transform ice to water. The assumption thatthe temperature of the ice ball and the temperature of water at the moving boundaryremains as the melting point U∗ means that only the heat conduction equation for thewater needs be considered. In other words, there is no heat flow in the solid phase.Therefore the problem is considered as a one-phase moving boundary problem. Otherassumptions made to simplify the modelling of the problem are neglecting effects of gravityand surface tension and assuming the values of all coefficients used to characterise thetwo phases are constant and the same in both phases.
This is the classical Stefan problem for a sphere. Mathematically, it is equivalent to theproblem of freezing a ball of water initially at the freezing temperature (simply change u to−u in the following dimensionless problem (3.1)–(3.5)). However, we shall use languageassociated with melting (and not freezing), since the melting problem (3.1)–(3.5) alsodescribes diffusion of solvent in a polymer, the application we treat later in the thesis.
The problem is scaled by introducing the non-dimensional variables
r = R
a∗, s(t) = S(T )
a∗, t = D
(a∗)2T, u(r, t) = U − U∗
U0 − U∗.
The non-dimensional model becomes
∂u
∂t= 1r2
∂
∂r
(r2∂u
∂r
)in s(t) < r < 1, (3.1)
u = 1 at r = 1, (3.2)
u = 0 at r = s(t), (3.3)∂u
∂r= −λds
dt at r = s(t), (3.4)
s(0) = 1 at t = 0, (3.5)
39

where u(r, t) is the temperature field in the liquid phase, r is the radial distance, t repre-sents time, r = s(t) describes the location of the solid-melt boundary and λ is the Stefannumber, defined as λ = L/Cl(U0 − U∗), where L is the latent heat and Cl is the specificheat of liquid phase.
The asymptotic analysis for large Stefan number λ has been studied by Pedroso andDomoto (1973b), Riley et al. (1974), Stewartson and Waechter (1976), Soward (1980)and McCue et al. (2008). Pedroso and Domoto (1973b) carried out the straightforwardperturbation for temperature and the moving solid-melt boundary. Riley et al. (1974)showed that the solution generated from Pedroso and Domoto (1973a)’s approach becomessingular as time approaches the complete melting time tf and used the method of matchedasymptotic expansions to deal with this singularity. Stewartson and Waechter (1976)showed the solution generated by Riley et al. (1974) still has a singular behaviour near thecentre of the sphere in the limit and determined a new asymptotic solution as a result ofcomplicated analysis. Soward (1980) developed a new, generalised method to address thissingularity in two cases which are solidifying a spherical object and a cylindrical object.Herrero and Velazquez (1997) used the matched asymptotic expansion techniques, a prioriestimates, and topological results together to address the near-complete meltdown. Unlikethe above authors, McCue et al. (2008) studied the full two-phase problem for λ� 1. Inaddition the small-time analysis of melting the ice ball has been addressed by Davis andHill (1982) , Hill and Kucera (1983) and McCue et al. (2008).
3.1.2 Model with kinetic undercooling
In the classical Stefan problem, the temperature of the solid phase (ice) at the movinginterface and the temperature of the liquid phase (water) at the moving interface areboth equal to the equilibrium melting temperature which is assumed to be a constant.In reality, the melting temperature is very weakly dependent on the speed of the movinginterface (for a full explanation of the physics involved, see Langer (1980) and Langer(1987), for example). This effect at the moving interface is called kinetic undercooling.
Unlike the classical Stefan problem, there is no exact one-phase formulation with kineticundercooling, since the temperature at the solid-melt interface is no longer a constant, andso there must be some heat conduction in the solid phase. Instead, an appropriate one-phase problem is carefully derived in Evans and King (2000) for the limit that conductionin the solid vanishes. The resulting generalisation of (3.1)–(3.5) is
∂u
∂t= 1r2
∂
∂r
(r2∂u
∂r
)in s(t) < r < 1, (3.6)
u = 1 at r = 1, (3.7)
un = −µdsdt at r = s(t), (3.8)
∂u
∂r= −(u+ λ)ds
dt at r = s(t), (3.9)
s(0) = 1 at t = 0, (3.10)
40

where µ is named as the dimensionless kinetic undercooling parameter and defined asµ = D/[k1a
∗(U0 − U∗)n] and k1 is the dimensional kinetic undercooling coefficient. Thedifference between the classical one-phase Stefan problem, (3.1)–(3.5) and one-phase Ste-fan problem with kinetic undercooling, (3.6)–(3.10) is the boundary conditions at thesolid-melt interface. Equation (3.8) is the thermodynamic equilibrium at the solid-meltinterface and it differs from Equation (3.3) by a kinetic correction due to the movinginterface. Equation (3.9) is the heat conservation at the solid-melt interface when kineticundercooling is considered because the assumption of no heat flux within the solid phaseused in Equation (3.4) is no longer hold. The exponent n in Equation (3.8) is used forthe purpose of generalisation and the exact value of n depends on the application. (Thevalue of n in the melting problem is one.) The problem (3.6)–(3.10) also describes thepenetration of solvent into glassy polymer. (see (5.9)–(5.12) in Chapter 5) In that context,u represents the dimensionless concentration of the solvent in the swollen polymer, s isthe dimensionless position of the moving interface which separates the swollen polymerregion containing solvent and the glassy polymer region containing no solvent.
Cohen and Erneux (1988a) and Evans and King (2000) studied a slightly simplified one-dimensional version of (3.6)–(3.10) which is based on a slab film. Cohen and Erneux(1988a) investigated the asymptotic behaviour of the solution for small and large timeand in the limit of large Stefan number. Evans and King (2000) examined the asymptoticbehaviour of the solution for small and large time and in the limits of small and largeStefan number. Lin et al. (2001) investigated the asymptotic solution of (3.6)–(3.10) inthe limit of large Stefan number and also solved Equations (3.6)–(3.10) numerically.
The layout of the rest of the chapter is as follows. In Section 3.2 numerical schemes arepresented to solve both (3.1)–(3.5) and (3.6)–(3.10); these include using finite differenceand finite volume discretisations together with the method of lines. We investigate thesmall time behaviour of Equations (3.6)–(3.10) by formal asymptotics in Section 3.3 whichis the same method used by Cohen and Erneux (1988a) and Evans and King (2000)on a slab film. In Section 3.4 we extend the asymptotic analysis for the large Stefannumber by the method presented in Riley et al. (1974), Stewartson and Waechter (1976)and Soward (1980) which is originally applied to the classical one-phase Stefan problem.The difference between the classical one-phase Stefan problem, (3.1)–(3.5) and one-phaseStefan problem with kinetic undercooling, (3.6)–(3.10) is showed and the comparisonbetween numerical and asymptotic solutions of one-phase Stefan problem with kineticundercooling is presented in Section 3.5.
3.2 Numerical scheme
Stefan problems are much more difficult to treat numerically than normal linear diffusionproblems because one of the boundaries is changing with time. One particular methodoften used to solve the one-phase Stefan problem numerically is to transform the movingboundary problem into a fixed boundary problem. Then the fixed boundary problem issolved numerically. Such a method is called a “front fixing” method. As a result of thefront fixing transformation, a convection-type term appears in the transformed governing
41

equation. There are a variety of numerical methods available to deal with the problemsthat exhibit convection as well as diffusion and they have been studied and investigatedextensively in the past.
We firstly introduce a new independent variable for the front fixing transformation andit is
w = r − s1− s. (3.11)
Hence the fixed boundary version of the problem (3.6)–(3.10) is
[s+ (1− s)w]2 (1− s)2∂u
∂t= ∂
∂w
{[s+ (1− s)w]2 ∂u
∂w
}+
[s+ (1− s)w]2 (1− s)2 ∂u
∂w
dsdt
1− w1− s in 0 < w < 1, (3.12)
u = 1 at w = 1, (3.13)∂u
∂w= −(u+ λ)(1− s)ds
dt at w = 0, (3.14)
un = −µdsdt at w = 0, (3.15)
s(0) = 1 at t = 0. (3.16)
The numerical method we use to solve the resultant fixed boundary problem is the methodof lines with finite difference spatial discretisation. The main advantage of using themethod of lines is the equation for the speed of the solid-melt boundary can be naturallyincorporated as an additional equation in the system. Hence we can solve for the locationof this moving boundary along with the temperatures at each time.
The governing Equation (3.12) is not in a conservative form therefore the numericalsolutions of the problem (3.12)–(3.16) generated from the method of lines with finitedifference spatial discretisation is not guaranteed to conserve mass. Hence we investigatewhether the numerical results of the problem (3.12)–(3.16) generated by the methodof lines with finite difference spatial discretisation have no loss of mass conservation ornot by comparing these numerical results with those of the conservative version of theproblem (3.12)–(3.16). The advantage of transforming the problem (3.12)–(3.16) into aconservative form is the numerical results of the conservative version generated from theconservative spatial discretisation are conservative. The numerical method we use to solvethe conservative fixed boundary problem is the method of lines with finite volume spatialdiscretisation. The reason of investigating the numerical results of the problem (3.12)–(3.16) is the corresponding two moving boundaries problem of the problem (3.12)–(3.16)is difficult to obtain the conservative form of the two moving boundaries problem.
42

The process of rewriting Equation (3.12) in a conservative form is described in Illingworthand Golosnoy (2005) by using the following two identities
∂
∂t
{u(1− s) [s+ (1− s)w]2
}= ∂u
∂t(1− s) [s+ (1− s)w]2 +
udsdt [s+ (1− s)w] {2(1− s)(1− w)− [s+ (1− s)w]} ,
and
∂
∂w
{u [s+ (1− s)w]2w
}= ∂u
∂w[s+ (1− s)w]2w+
u [s+ (1− s)w] {[s+ (1− s)w] + 2w(1− s)} .
Hence the expressions
(1− s) [s+ (1− s)w]2 ∂u∂t, and [s+ (1− s)w]2 ∂u
∂w
are obtained by rearranging the above two identities and these two expressions are sub-stituted back into Equation (3.12) to derive the conservative form. Therefore the conser-vative form of Equation (3.12) is
∂
∂t
{u(1− s) [s+ (1− s)w]2
}= ∂
∂w
{[s+ (1− s)w]2
1− s
[∂u
∂w+ u(1− w)(1− s)ds
dt
]},
(3.17)
and the flux of the Equation (3.17) is
J = [s+ (1− s)w]2
1− s
[− ∂u∂w− u(1− w)(1− s)ds
dt
],
where −u(1−w)(1− s)ds/dt is the artificial advective term created from the front fixingmethod and the transformation of the governing PDE into a conservative form. Thisadvective term does not have a physical interpretation in the context of the originalproblem. The boundary conditions of the conservative fixed boundary problem are stillthe same as the boundary conditions of the problem (3.12)–(3.16).
3.2.1 Method of Lines
The basic idea of the method of lines is that a partial differential equation (PDE) withboundary conditions are discretised in space to form a system of ordinary differentialequations (ODEs). The first step of the method of lines is introducing N − 1 internalnodes to divide the domain of the partial differential equation into N subintervals. Thenext step is applying a spatial discretisation such as the finite difference method or thefinite volume method, to the partial differential equation at each node in order to forman ordinary differential equation at each node. The resulting semi-discrete problem isa system of between N − 1 and N + 1 ordinary differential equations (depending onthe boundary conditions) in time. This resulting semi-discrete problem can be solved
43

numerically by standard ODE solvers. Hence the method of lines is not confined to aparticular ODE solver to numerically solve the system of ordinary differential equationswhich is the another advantage of the method of lines. The ODE solver used in thisproject is the MATLAB built-in ODE/DAEs solver, ode15i.
3.2.2 Finite difference method
In the finite difference method, the interval [0,1] is first divided into n equal subintervalswhose endpoints are the nodes wi = (i − 1)∆w, for i = 2, · · · , n + 1 with w1 = 0. Thespatial derivatives in the partial differential equation are approximated by appropriatedifference-quotient formulae. Each difference-quotient formula approximates the spatialderivatives with algebraic expressions.
In order to apply the difference formulae on Equation (3.12), the equation is first rewrittenas
[s+ (1− s)w] (1− s)2∂u
∂t= [s+ (1− s)w] ∂
2u
∂w2 + 2(1− s) ∂u∂w
+
[s+ (1− s)w] (1− s)(1− w)dsdt∂u
∂w. (3.18)
The first partial derivatives of u with respect to w in Equation (3.18) for interior gridnodes are approximated by the second order centred-difference formula as
∂u
∂w
∣∣∣∣w=wi
= ui+1 − ui−12∆w +O
((∆w)2
). (*)
At the left boundary w = 0, Equation (∗) cannot be used, because there is no node to theleft. Instead the first partial derivative of u with respect to w at w = 0 is approximatedby the first order forward-difference formula as
∂u
∂w
∣∣∣∣w=w1
= u2 − u1∆w +O (∆w) .
The second partial derivative of u with respect to w in Equation (3.18) for interior gridnodes is approximated by the second order centred-difference formula as
∂2u
∂w2
∣∣∣∣w=wi
= ui+1 − 2ui + ui−1(∆w)2 +O
((∆w)2
),
and the second partial derivative of u with respect to w at w1 = 0 is also approximatedby the second order centred-difference formula as
∂2u
∂w2
∣∣∣∣w=w1
= u2 − 2u1 + u0(∆w)2 +O
((∆w)2
),
where u0 is refereed to as a ghost node.
44

The ghost node is handled by applying the second order centred-difference formula onEquation (3.14) as
u2 − u02∆w ≈ u1
µ(u1 + λ)(1− s),
hence the expression for the ghost node is
u0 ≈ u2 −2∆wµ
u1(u1 + λ)(1− s).
Therefore the second partial derivative of u with respect to w at w1 = 0 is approximatedas
∂2u
∂w2
∣∣∣∣w=w1
= 2(u2 − u1)(∆w)2 − 2
µ∆wu1(u1 + λ)(1− s) +O (∆w) .
These algebraic difference expressions are substituted for the spatial derivatives in thepartial differential Equation (3.18) to form ordinary differential equations at each node.
The resultant ODE obtained at w = 0 is{[s+ (1− s)w1] (1− s)2
} dudt
∣∣∣∣w=w1
= [s+ (1− s)w1] 2(u2 − u1)(∆w)2 −
[s+ (1− s)w1] 2µ∆wu1(u1 + λ)(1− s)+
2(1− s)u2 − u1∆w −
[s+ (1− s)w1] (1− w1)(1− s)u1µ
u2 − u1∆w .
The resultant ODE obtained for each interior node is{[s+ (1− s)wi] (1− s)2
} dudt
∣∣∣∣w=wi
= [s+ (1− s)wi]ui+1 − 2ui + ui−1
(∆w)2 +
2(1− s)ui+1 − ui−12∆w −
[s+ (1− s)wi] (1− wi)(1− s)u1µ
ui+1 − ui−12∆w ,
for i = 2, · · · , n. The resultant equation obtained by discretising the boundary condition(3.13) at w = 1 is
un+1 = 1.
The equation for the moving boundary is also solved and the ODE is
dsdt = −1
µu1.
45

The resultant set of ODEs obtained by discretising the problem (3.12)–(3.16) is re-arranged to a column vector form
F(t,y,y′) = 0
in order to use the MATLAB’s built-in ODE solver ode15i (see Section 3.2.4). Forexample, the vector y of resultant ODEs for the case of 5 grid nodes (n = 4) is
y =
u1
u2
u3
u4
u5
s
.
The sparsity pattern of Jy, the Jacobian matrix of ∂F/∂y and the sparsity pattern ofJy′ , the Jacobian matrix of ∂F/∂y′ generated from the above ODEs for the case of 5 gridnodes are
Jy =
∗ ∗ ∗∗ ∗ ∗ ∗∗ ∗ ∗ ∗∗ ∗ ∗ ∗
∗∗
and Jy′ =
∗ ∗∗ ∗∗ ∗∗ ∗
∗
.
The numerical error caused by the finite difference method is introduced by replacing thespatial derivatives in the partial differential equation, Equation (3.12) with the algebraicdifference expressions. The effect of this error can be minimised by reducing the thelength of each subinterval ∆w. Additionally the Peclet number defined in Morton (1996)is the ratio of the convection to the diffusion and is also kept small when the value of∆w is reduced. The sufficiently small Peclet number ensures the numerical results do nothave artificial oscillation.
3.2.3 Finite volume method
The finite volume method is a method used to discretise PDEs in space that employsideas from both finite difference and finite element methods. The solution domain isdivided into a finite number of continuous control volumes which do not overlap. Thelocation of grid nodes in the solution domain can be classified into three main schemes inthe finite volume method. They are the cell-centred scheme, vertex-centred scheme andcell-edge scheme. The vertex-centred scheme is chosen in this project, meaning controlvolume faces are located halfway between adjacent nodes. This arrangement is depictedin Figure 3.1.
46

Boundary CV Interior CV
CV faceNode
Figure 3.1: Vertex-centred control volume scheme in 1D.
The interval [0,1] is first divided into n equal subintervals whose endpoints are the gridnodes wi, for i = 2, · · · , n+ 1 with w1 = 0.
wi−1 wi wi+1wiw wie
∆wi
δwiw δwie
Figure 3.2: The control volume for an interior grid node in 1D.
Figure 3.2 depicts the control volume of an interior grid node. The west face of the controlvolume is located at wiw and the east face of the control volume at wie. The location ofwiw and wie are determined as
wiw = wi + wi−12 , and wie = wi+1 + wi
2 .
The width of the control volume is ∆wi, as defined
∆wi = wie − wiw.
The distances between the node wi and the west and east neighbours are defined as
δwiw = wi − wi−1, and δwie = wi+1 − wi,
respectively.
Figure (3.3) depicts the control volume of a boundary node at w1 = 0. The width of thiscontrol volume is ∆w1 which is only half the width of an interior control volume. Thewest face of this control volume is now equal to the location of grid node w1 therefore thedistance between the node w1 and the west neighbour does not exist. The finite volumemethod solves the integral form of the conservation equation in each control volume.
47

w1 w2 w3w1e
∆w1
δw1e
Figure 3.3: The control volume of a boundary grid in 1D.
This method is a conservative discretisation method and has the important attribute ofensuring that underlying quantity is conserved over the whole domain of interest.
The discretisation of Equation (3.17) using the finite volume method starts from integrat-ing Equation (3.17) over a control volume as∫ wie
wiw
∂
∂t
{u(1− s) [s+ (1− s)w]2
}dw +
∫ wie
wiw
∂J
∂wdw = 0
⇒∫ wie
wiw
∂
∂t
{u(1− s) [s+ (1− s)w]2
}dw + Jie − Jiw = 0,
where Jie and Jiw are the fluxes evaluated at the east and west faces of the control volume.The integration and differentiation for the partial time derivative can interchange thereforethe approximation of the partial time derivative is∫ wie
wiw
∂
∂t
{u(1− s) [s+ (1− s)w]2
}dw = d
dt
∫ wie
wiw
u(1− s) [s+ (1− s)w]2 dw
≈ ∆widdt{ui(1− s) [s+ (1− s)wi]2
}.
Jie is calculated as
Jie = [s+ (1− s)w]2
1− s
[− ∂u∂w− u(1− w)(1− s)ds
dt
] ∣∣∣∣wie
= [s+ (1− s)wie]2
1− s
[− ∂u∂w
∣∣∣∣wie
− u|wie(1− wie)(1− s)dsdt
],
where the partial derivative of u with respect to w evaluated at w = wie is approximatedby the central difference formula as
∂u
∂w
∣∣∣∣wie
≈ ui+1 − uiδwie
.
The approximation of the partial derivative of u with respect to w achieves second orderaccuracy in the vertex-centred case. The u|wie term in Jie is an advective term and is thevalue of u at the east face of the control volume. In this thesis the averaging scheme isused to approximate the value of u at faces of the control volume. The averaging scheme
48

takes equal weighting of adjacent nodes to approximate the value of u at the faces of thecontrol volume. The approximation of u evaluated at w = wie is
u|wie ≈12(ui + ui+1),
and is second order accurate in space. The requirement of utilising the averaging schemeis that the effective ratio of the convection to the diffusion must be kept sufficiently small.This condition is achieved by using a fine grid in the numerical solutions.
The flux evaluated at the west face of an interior control volume is calculated by a similarprocedure. The flux evaluated at the west face of the first control volume is calculateddifferently because the partial derivative of u with respect to w evaluated at w = 0 isspecified as one of boundary conditions. Therefore the partial derivative of u with respectto w evaluated at w = 0 in J1w is replaced by the Equation (3.14) instead using thecentral difference formula. J1w is calculated as
J1w = [s+ (1− s)w1w]2
1− s
[(u1 + λ)(1− s)ds
dt − u1(1− w1w)(1− s)dsdt
]= λs2 ds
dt ,
where w1w is equal to 0.
The resultant ODE obtained at w = 0 is
∆w1ddt{u1(1− s) [s+ (1− s)w1]2
}+ J1e − J1w = 0,
where J1e is the flux at the east face and defined as
J1e = [s+ (1− s)w1e]2
1− s
[u1 − u2δw1e
− u1e(1− w1e)(1− s)dsdt
],
and J1w is the flux at w = 0 and defined as
J1w = λs2 dsdt .
The resultant ODE obtained for each interior control volume is
∆widdt{ui(1− s) [s+ (1− s)wi]2
}+ Jie − Jiw = 0,
where Jie is the flux at wie and defined as
Jie = [s+ (1− s)wie]2
1− s
[ui − ui+1δwie
− uie(1− wie)(1− s)dsdt
],
and Jiw is the flux at wiw and defined as
Jiw = [s+ (1− s)wiw]2
1− s
[ui−1 − uiδwiw
− uiw(1− wiw)(1− s)dsdt
],
for i between 2 and n. The resultant equations obtained by discretising the boundarycondition at w = 1 and the speed of the solid-melt boundary are the same as the ones in
49

Section 3.2.2, which are
(un+1 − 1)(1− s) = 0 and dsdt = −1
µu1,
respectively.
The resultant set of ODEs obtained by discretising Equation (3.17) and Equations (3.13)–(3.16) is re-arranged to a column vector form
F(t,y,y′) = 0
in order to use the MATLAB’s built-in ODE solver ode15i to obtain numerical solutions.
The vector y of resultant ODEs for the case of 6 grid nodes (n = 5) is
y =
u1(1− s) [s+ (1− s)w1]2
u2(1− s) [s+ (1− s)w2]2
u3(1− s) [s+ (1− s)w3]2
u4(1− s) [s+ (1− s)w4]2
u5(1− s) [s+ (1− s)w5]2
u6(1− s) [s+ (1− s)w6]2
s
.
The sparsity pattern of Jy, the Jacobian matrix of ∂F/∂y and the sparsity pattern ofJy′ , the Jacobian matrix of ∂F/∂y′ generated from the above ODEs for the case of 6 gridnodes are
Jy =
∗ ∗ ∗∗ ∗ ∗ ∗∗ ∗ ∗ ∗∗ ∗ ∗ ∗∗ ∗ ∗ ∗
∗ ∗∗ ∗
and Jy′ =
∗ ∗∗ ∗∗ ∗∗ ∗∗ ∗
∗
.
These two matrices indicate the locations of the non zero elements of the correspondingJacobian matrix and are passed as inputs to ode15i, which uses this information to speedup the computational process.
3.2.4 ode15i
ode15i is the MATLAB built-in ODE solver and solves fully implicit differential equationsof the form
F(t,y,y′) = 0,
50

by employing variable order and variable step-size numerical differentiation formulae.The function provides options to facilitate the computational process and the main one ofinterest to this problem is “JPattern”. The option JPattern requires the user to providetwo sparse matrices which are the sparsity patterns of the Jacobian matrix ∂F/∂y and∂F/∂y′ . The values in the these two sparse matrices are either 0 or 1. When the value ofthe sparsity pattern of ∂F/∂y(i, j) is one, it indicates the corresponding element in theJacobian matrix ∂F/∂y(i, j) is not zero. The same idea also applies to the sparsity patternof the Jacobian matrix ∂F/∂y′ . The function ode15i uses the sparsity patterns of theJPattern matrices to generate the Jacobian matrices numerically, meaning it requires lesscomputational time than the case without the sparsity patterns of the JPattern matrices.
3.2.5 Comparison of numerical methods
The one-phase Stefan problem with kinetic undercooling is solved separately by themethod of lines with finite difference spatial discretisation and the method of lines withfinite volume spatial discretisation. Both numerical methods use the MATLAB’s built-infunction ode15i to solve the resultant system of ODEs which are described above. Thedifference between the two numerical methods on the one-phase Stefan problem with ki-netic undercooling is examined here. The number of grid points used in this section forspatial discretisation in both methods is 7001.
0 0.5 1 1.5 2 2.5 30
0.2
0.4
0.6
0.8
1
t
s
Figure 3.4: The comparison of the time history of the moving solid-melt boundary sgenerated numerically by the method of lines with finite difference method (red solidcurve) and the method of lines with finite volume method (blue dashed curve) for µ = 1and λ = 10. The number of grid points used for spatial discretisation in both methods is7001.
Figure 3.4 represents the numerical results of the moving solid-melt boundary s versustime. Under the scale used in Figure 3.4 the red solid curve and the blue dashed curveare indistinguishable. After zooming in, these two curves are distinguishable but thedifference between the two curves is less than the order of 10−4. Hence the numerical
51

solutions of the moving solid-melt boundary s versus time, generated from these twonumerical methods, have the same behaviour.
tt = 0.1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.2
0.4
0.6
0.8
1
r
u
(a) The temperature profiles versus r
t
t = 2.82732
0 0.0001 0.0002 0.0003 0.0004 0.0005 0.0006 0.0007 0.0008 0.0009 0.001
0.9297
0.9298
0.9299
0.93
0.9301
0.9302
0.9303
r
u
(b) The temperature profiles versus r
Figure 3.5: The comparison of the temperature profiles generated numerically by themethod of lines with finite difference method (red solid curves) and the method of lineswith finite volume method (blue dashed curves) for µ = 1 and λ = 10. The number ofgrid points used for spatial discretisation in both methods is 7001. (a) From right to left,temperature profiles are shown for times t = 0.1, 1, 2, 2.6 and 2.8. (b) From bottom totop, temperature profiles are shown for times t = 2.82732, 2.82733, 2.82734 and 2.82735.
Figure 3.5(a) and 3.5(b) represent the numerical results of the temperature profiles atdifferent times. Under the scale used in Figure 3.5(a) it is not possible to distinguishthe red solid curves and the blue dashed curves at each time. But after zooming in thegraph these coloured curves are clearly not laying on top of each other. The difference
52

between the two coloured curves in Figure 3.5(b), at the each time, is approximatelyin the order of 10−5. The numerical solutions generated from both numerical methodsbehave identically except for the spatial region where r is between 0 and 0.0002. Thisoccurs when the moving solid-melt boundary approaches the centre of the sphere.
After comparing the numerical results in Figure 3.4, 3.5(a) and 3.5(b), both numericalmethods produce acceptable solutions and the difference between the two numerical meth-ods is small. Therefore the method of lines with finite difference spatial discretisation willbe used to solve other moving boundary problems in this thesis because this method iseasier to apply to those problems. But the method of lines with finite volume discretisa-tion is used in the rest of the sections of this chapter because the conservative nature offinite volume discretisation.
3.2.6 The case of µ = 0
The difference between the classical one-phase Stefan problem and the one-phase Ste-fan problem with kinetic undercooling is the parameter µ. This difference occurs at theboundary condition of u(r = s(t), t) and the speed of the solid-melt interface. The numer-ical method of the classical one-phase Stefan problem uses different boundary conditionof u at r = s(t) and different equation for the moving boundary when the method iscompared with the numerical method of the one-phase Stefan problem with kinetic un-dercooling. Therefore the numerical method utilised for the classical one-phase Stefanproblem is similar to the numerical method used for the one-phase Stefan problem withkinetic undercooling and is briefly presented in the following.
The fixed boundary version of the problem (3.1)–(3.5) in conservative form is
∂
∂t
{u(1− s) [s+ (1− s)w]2
}= ∂
∂w
{[s+ (1− s)w]2
1− s
[∂u
∂w+ u(1− w)(1− s)ds
dt
]}in 0 < w < 1, (3.19)
u = 1 at w = 1, (3.20)
u = 0 at w = 0, (3.21)∂u
∂w= −λ(1− s)ds
dt at w = 0, (3.22)
s(0) = 1 at t = 0, (3.23)
where the flux of the Equation (3.19) is
J = [s+ (1− s)w]2
1− s
[− ∂u∂w− u(1− w)(1− s)ds
dt
].
The numerical method used to solve Equations (3.19)–(3.23) is the method of lines withfinite difference discretisation. Equation (3.21) is now chosen to be the boundary conditionat w = 0 and Equation (3.22) describes the speed of the moving solid-melt boundary s.
53

The resultant equation obtained by discretising the boundary conditions at w = 0 is
u1 = 0.
The resultant ODE obtained by discretising Equation (3.19) for each interior controlvolume is
∆widdt{ui(1− s) [s+ (1− s)wi]2
}+ Jie − Jiw = 0,
where Jie is the flux at wie and defined as
Jie = [s+ (1− s)wie]2
1− s
[ui − ui+1δwie
− uie(1− wie)(1− s)ds
dt
],
and Jiw is the flux at wiw and defined as
Jiw = [s+ (1− s)wiw]2
1− s
[ui−1 − uiδwiw
− uiw(1− wiw)(1− s)dsdt
],
for i between 2 and n. The resultant equation obtained by discretising the boundarycondition at w = 1 is
un+1 − 1 = 0.
The moving solid-melt boundary is not discretised as in Section 3.2.2 or 3.2.3 because theequation of the moving solid-melt boundary is now different. The resultant ODE of themoving solid-melt boundary is
λ(1− s)dsdt + u2 − u1
δw1e= λ(1− s)ds
dt + u2δw1e
= 0.
The resultant set of ODEs obtained by discretising the problem (3.20)–(3.23) is re-arranged to a column vector form F(t,y,y′) = 0 in order to solve by MATLAB’s built-inODE solver ode15i. The sparsity patterns of the Jacobian ∂F/∂y and ∂F/∂y′ generatedfrom the above ODEs for the case of 6 grid nodes are
∗ ∗∗ ∗ ∗ ∗∗ ∗ ∗ ∗∗ ∗ ∗ ∗∗ ∗ ∗ ∗
∗ ∗∗ ∗
and
∗ ∗∗ ∗∗ ∗∗ ∗
∗
.
These two matrices are passed as inputs to ode15i in order to speed up the computationalprocess.
54

3.3 Small time limit
The asymptotic analysis for the small time behaviour of problem (3.6)–(3.10) is crucialto the numerical method because the results serve as initial solutions to the numericalprogram. The small time behaviour of melting the ice ball means only a small amount ofice at the surface of ice ball is just melted and the solid-melt boundary only moves awayfrom the surface of ice ball slightly. The solid-melt boundary s(t) should be less 1 and alsovery close to 1 therefore 1 − s(t) is a small value in the small time behaviour of meltingthe ice ball. The asymptotic analysis is presented as follows. A new variable us(r, t) isintroduced to replace u(r, t) and simplify the governing equation, and the relation betweenthese two variables is
us(r, t) = ru(r, t).
The non-dimensional problem based on the new variable us(r, t) is
∂us∂t
= ∂2us∂r2 in s(t) < r < 1, (3.24)
us = 1 at r = 1, (3.25)
s∂us∂r− us = −(us + λs)sds
dt at r = s(t), (3.26)
uns = −µsndsdt at r = s(t), (3.27)
s(0) = 1 at t = 0. (3.28)
The Equations (3.24)–(3.28) are transformed into the fixed boundary problem as
(1− s)2∂us∂t
= ∂2us∂w2 + (1− w)(1− s)ds
dt∂us∂w
in 0 < w < 1, (3.29)
us = 1 at w = 1, (3.30)∂us∂w− ∂us∂w
(1− s)− us(1− s) =
−[us + λ− (us + 2λ)(1− s) + λ(1− s)2
](1− s)ds
dt at w = 0, (3.31)
uns = −µsndsdt at w = 0, (3.32)
s(0) = 1 at t = 0. (3.33)
where the dependent variable w is defined in Section 3.2. In Equations (3.29)–(3.33), 1−sappears in governing equation and at boundary condition therefore the variable us andds/dt in Equations (3.29)–(3.33) are expanded in power series of 1− s as
us ∼ us0(w) + us1(w)(1− s) + us2(w)(1− s)2 + · · · ,dsdt ∼ g0 + g1(1− s) + g2(1− s)2 + · · · , as s→ 1,
55

and substituted back to Equations (3.29)–(3.33) to solve for
us0(w), us1(w), us2(w), · · · , and
g0, g1, g2, · · · .
The leading order system of equations for Equations (3.29)–(3.33) is
0 = d2us0dw2 in 0 < w < 1,
us0 = 1 at w = 1,dus0dw = 0 at w = 0,
uns0 = −µg0 at w = 0,
the system of equations for the first correction term is
0 = d2us1dw2 + (1− w)g0
dus0dw in 0 < w < 1,
us1 = 0 at w = 1,dus1dw −
dus0dw − us0 = −(λ+ us0)g0 at w = 0,
nun−1s0 us1 = −µ(g1 − ng0) at w = 0,
the system of equations for the second correction term is
− g0us1 = d2us2dw2 + (1− w)
(g0
dus1dw + g1
dus0dw
)in 0 < w < 1,
us2 = 0 at w = 1,dus2dw −
dus1dw − us1 = −(us1 − us0 − 2λ)g0 − (us0 + λ)g1 at w = 0,
nun−1s0 us2 + n(n− 1)
2 un−2s0 u2
s1 = −n(n− 1)µ2 g0 + nµg1 − µg2 at w = 0.
and the resulting solutions of these ordinary differential equations by using method ofseparation of variables are
us0 = 1, us1 =− (1 + λ+ µ)µ
(1− w), us2 = 1 + λ
µ2 [1 + 2µ+ n(1 + λ)] (1− w),
g0 = −1µ, g1 = n(1 + λ)
µ2 , and
g2 = −n2µ3
[(3n− 1)λ2 + (6n+ 2µ)λ+ 1 + 3n+ 2µ
].
The asymptotic series of ds/dt in terms of 1− s is
dsdt = −1
µ+ n(1 + λ)
µ2 (1− s)− n
2µ3
[(3n− 1)λ2 + (6n+ 2µ)λ+ 1 + 3n+ 2µ
](1− s)2 · · · ,
56

which can give an asymptotic series of s in terms of t after integration and balancing outterms of asymptotic expansion. Therefore the resultant asymptotic series of s in terms ofterms of t can be calculated according
s(t) ∼1 + g0t−12g0g1t
2 + 16(g0g
21 + 2g2
0g2)t3 + · · · as t→ 0+,
which is showed in Appendix B and is also used to determine the asymptotic series of uin terms of t. Therefore the small time behaviour of problem (3.6)–(3.10) are
u(r, t) ∼1− 1 + λ
µ
(1− rr
)+ 1 + λ
µ3 [1 + 2µ+ n(1 + λ)](1− r
r
)t+ · · · (3.34)
s(t) ∼1− t
µ+ n(1 + λ)
2µ3 t2−n
6µ5
[(4n− 1)λ2 + (8n+ 2µ)λ+ 1 + 4n+ 2µ
]t3 + · · · as t→ 0+. (3.35)
From these results, 1 − s = O(t) and the speed of solid-melt boundary ds/dt is finite ast → 0+ which are different to the classical one-phase Stefan problem (µ = 0). In theclassical one-phase Stefan problem, 1 − s = O(t1/2) and ds/dt → −∞ as t → 0+. Thespeed of the solid-melt boundary in the classical one-phase Stefan problem is trying tobe unphysical as t → 0+ hence the effect of considering the kinetic undercooling at thesolid-melt boundary regularises the classical one-phase Stefan problem in the small timelimit. In addition the small time behaviour of ∂u/∂r evaluated at r = 1 is
∂u
∂r
∣∣∣∣r=1
= 1 + λ
µ− 1 + λ
µ3 [1 + 2µ+ n(1 + λ)] t+ · · · , (3.36)
which is O(1) as t→ 0+.
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045 0.050.8
0.85
0.9
0.95
1
t
s
Figure 3.6: The comparison of the numerical solution of the problem (3.6)–(3.10) (redsolid) computed for µ = 0.1 and λ = 1 with the asymptotic result (3.35) (blue dashes).
Now we compare the numerical result with the small time asymptotic result on the timehistory of moving solid-melt boundary s in Figure 3.6. Under the scale used in Figure
57

3.6, the blue dashed curve and red solid curve are indistinguishable when time t is lessthan 0.005. Hence the small time asymptotic result starts to diverge from the numericalresult after the initial stage of the melting process.
Small time behaviour for a slab film
Cohen and Erneux (1988a) investigated a polymer-penetrant system in a slab film. Thedimensionless equations for a polymer-penetrant system in a slab film are similar to prob-lem (3.6)–(3.10) except the spatial dependent variable is now in the Cartesian coordinatesystem instead the spherical coordinate system. The small time behaviour of solventconcentration in a slab film is
u(x, s) ∼ 1− 1 + λ
µ(1− x) + 1 + λ
µ3 [1 + n(1 + λ)] (1− x)t+ · · · with
s(t) ∼ 1− t
µ+ n(1 + λ)
2µ3 t2 − n
6µ5
[(4n− 1)λ2 + 8nλ+ 1 + 4n
]t3 + · · · as t→ 0+.
The difference between the spherical problem and the problem for a slab film starts toemerge at the second correction term of u and s. This behaviour is expected because thedomain s(t) < r < 1 for melting an ice ball is a thin shell which is one-dimensional andalmost equivalent to the domain s(t) < x < 1 for a slab film in the small time limit.
3.4 Large Stefan number limit
The solid-melt boundary s in the melting problem moves relatively slow to the centre ofthe sphere, with the complete melting time tf = O(λ) in the limit of large Stefan number.In the classical Stefan problem (µ = 0), there are three time scales for the asymptoticanalysis of λ→∞ and they are t = O(λ), tf − t = O(1) and tf − t = O(exp(−2
√2πλ)).
Riley et al. (1974) investigated the first two time scales and the last time scale was studiedby Stewartson and Waechter (1976) and Soward (1980).
An earlier time scale, namely t = O(µ2/λ), must be considered for the asymptotic anal-ysis λ → ∞ in the one-phase Stefan problem with kinetic undercooling (µ > 0) beforeconsidering the time scale t = O(λ). The reason is that the results of the time scalet = O(λ) are not consistent with the results of the small time behaviour in Section 3.3.Another time scale is considered after the time scale t = O(λ), namely tf − t = O(1).
3.4.1 The first time scale t = O(µ2/λ)
This time scale is the first time scale for λ → ∞ in the one-phase Stefan problem withkinetic undercooling. This time scale is the same one used by Cohen and Erneux (1988b)and Evans and King (2000) for the problem resulted from a slab film and also the sameone used by Lin and Peng (2005) for the spherical problem. We provide another twocorrection terms of this time scale for the case n = 1 that are not treated in Lin and Peng(2005).
58

In this time scale, 1− s is O(µ/λ) and three new dimensionless variables are introducedwhich are
ρ = λ
µr, τ = λ
µ2 t, and σ(τ) = λ
µs(t).
The problem (3.6)–(3.10) is transformed into
∂2u
∂ρ2 + 2ρ
∂u
∂ρ= 1λ
∂u
∂σ
1τ ′(σ) in σ < ρ < ρf , (3.37)
u = 1 at ρ = ρf , (3.38)
un = − 1τ ′(σ) at ρ = σ, (3.39)
∂u
∂ρ= −
(1 + u
λ
) 1τ ′(σ) at ρ = σ, (3.40)
σ = ρf at τ = 0, (3.41)
where ρf is constant and defined as
ρf = λ
µ.
As a result the parameter µ does not directly appear in Equations (3.37)–(3.41) due tothe scaling. The variable u is now a function of the independent variable ρ and σ insteadof ρ and τ . The role of τ and σ are exchanged hence τ is now a function of σ. Thevariable u and τ in Equations (3.37)–(3.41) are expanded in power series of 1/λ as
u = u0(ρ, σ) + u1(ρ, σ) 1λ
+ u2(ρ, σ) 1λ2 + · · · ,
τ = τ0(σ) + τ1(σ) 1λ
+ τ2(σ) 1λ2 + · · · ,
and substituted back to Equations (3.37)–(3.41) to obtain the solutions of each term inthe asymptotic series.
The system of equations for leading order terms is
∂2u0∂ρ2 + 2
ρ
∂u0∂ρ
= 0 in σ < ρ < ρf ,
u0 = 1 at ρ = ρf ,
un0 = − 1τ′0
at ρ = σ,
∂u0∂ρ
= − 1τ′0
at ρ = σ,
τ0 = 0 at σ = ρf ,
59

the system of equations for the first correction terms with n = 1 is
∂2u1∂ρ2 + 2
ρ
∂u1∂ρ
= 1τ′0
∂u0∂σ
in σ < ρ < ρf ,
u1 = 0 at ρ = ρf ,
u1 = τ′1
(τ ′0)2 at ρ = σ,
∂u1∂ρ
= − 1τ′0
(u0 −
τ′1τ′0
)at ρ = σ,
τ1 = 0 at σ = ρf ,
and the system of equations for the second correction terms with n = 1 is
∂2u2∂ρ2 + 2
ρ
∂u2∂ρ
= 1τ′0
∂u1∂σ− τ
′1
(τ ′0)2∂u0∂σ
in σ < ρ < ρf ,
u2 = 0 at ρ = ρf ,
u2 = −1τ′0
(τ ′1τ′0
)2
− τ′2τ′0
at ρ = σ,
∂u2∂ρ
= −1τ′0
(τ ′1τ′0
)2
− τ′2τ′0
+ τ′1
(τ ′0)2u0 −1τ′0u1 at ρ = σ,
τ2 = 0 at σ = ρf .
The leading order solution of u by using integrating factor method is
u0 = 1− p(σ)(ρfρ− 1
)with p(σ) = σ2/n
p(1−n)ρ1/nf + σ(2−n)/n(ρf − σ)
. (3.42)
The leading order solution of τ is solved by the nonlinear ordinary differential equation
dτ0dσ = −
(−dτ0
dσ
)(n−1)/n− σ + σ2
ρf, (3.43)
with the initial condition τ0 = 0 at σ = ρf . The higher order terms can only be calculatedif n is set to one. Specially the solution of second correction terms (u2 and τ2) are obtainedfrom differential equations by using Maple. Therefore the asymptotic series of τ and u
based on large λ for Equations (3.37)–(3.41) with n = 1 are
τ = ρf − σ +ρ2f − σ2
2 −ρ3f − σ3
3ρf+ 1
6
[2(ρf − σ) + (ρf − σ)2 + 2ρf (ρf − σ)
σ2 − σρf − ρf
]1λ−
145
σρf(σ2 − σρf − ρf )4
[σ8 + (−6ρf − 3)σ7 + (15ρ2
f + 12ρf + 5)σ6+
(−20ρ3f − 15ρ2
f − 12ρf )σ5 + (15ρ4f − 15ρf )σ4 + (−6ρ5
f + 15ρ4f + 20ρ3
f + 45ρ2f )σ3+
(ρ6f − 12ρ5
f − 15ρ4f − 45ρ3
f )σ2 + (3ρ6f + 15ρ4
f )σ + 2ρ6f
] 1λ2 +O
( 1λ3
). (3.44)
60

u =1 +(
1ρ− 1ρf
)σ2ρf
σ2 − σρf − ρf+{σρ2
f (σ + 2)(ρ2 − 3ρfρ+ 2ρ2f )
6(σ2 − σρf − ρf )3 +(
1ρ− 1ρf
)×
σ2ρ3f
[σ4 − 3σ3ρf + σ2(2ρ2
f − 3ρf + 2) + 4σρ2f − 6ρf
]6(σ2 − σρf − ρf )4
1λ−
{1
360ρ3f
(σ2 − σρf − ρf )6 ×[(
12σ5 + (−15ρf + 30)σ4 + (3ρ2f − 48ρf )σ3+
(9ρ2f − 24ρf )σ2 − 6ρ2
f
)ρ4+(
− 60ρfσ5 + (75ρ2f − 150ρf )σ4 − (15ρ3
f − 240ρ2f )σ3 − (45ρ3
f − 120ρ2f )σ2 + 30ρ3
f
)ρ3+(
(10ρf + 20)σ6 + (90ρ2f − 60ρf − 120)σ5 + (−120ρ3
f + 330ρ2f + 60ρf )σ4+
(20ρ4f − 440ρ3
f + 180ρ2f + 400ρf )σ3 + (60ρ4
f − 360ρ3f − 240ρ2
f )σ2+
120ρ2fσ − 40ρ4
f
)ρ2+(
(−30ρ2f − 60ρf )σ6 + (−30ρ3
f + 180ρ2f + 360ρf )σ5 + (60ρ4
f − 390ρ3f − 180ρ2
f )σ4+
(360ρ4f − 540ρ3
f − 1200ρ2f )σ3 + (600ρ4
f + 720ρ3f )σ2 − 360ρ3
fσ)ρ−
4ρ2f ×
((−5ρf − 10)σ6 + (3ρ2
f + 30ρf + 60)σ5 + (−45ρ2f − 30ρf )σ4+
(2ρ4f + 28ρ3
f − 90ρ2f − 200ρf )σ3 + (6ρ4
f + 84ρ3f + 120ρ2
f )σ2 − 60ρ2fσ − 4ρ4
f
)]−
1360
σ2ρ4f
(σ2 − σρf − ρf )7 ×(
1ρ− 1ρf
)[−12σ9 + (65ρf − 2)σ8+
(−138ρ2f + 98ρf + 40)σ7 + (145ρ3
f − 412ρ2f − 258ρf )σ6+
(−68ρ4f + 680ρ3
f + 276ρ2f − 16ρf )σ5 + (−500ρ4
f + 335ρ3f + 546ρ2
f − 160ρf )σ4+
(8ρ6f + 112ρ5
f − 720ρ4f − 890ρ3
f − 384ρ2f )σ3+
(24ρ6f + 336ρ5
f + 400ρ4f + 1170ρ3
f + 960ρ2f )σ2+
(−800ρ4f − 1080ρ3
f )σ − 16ρ6f
]} 1λ2 +O
( 1λ3
)(3.45)
Equations (3.45) and (3.44) do not work under the limit µ→ 0+ because this time scaledoes not exist in the µ = 0 problem.
After rewriting Equation (3.45) with dependent variable r and s and expanding ∂u/∂r ass→ 1− by a Taylor series, ∂u/∂r evaluated at r = 1 is
∂u
∂r
∣∣∣∣r=1
=1 + λ
µ−[λ2 + 3(3 + 2µ)λ+ 2 + 5µ
]µ2 (1− s)+
2λ3 + (13 + 6µ)λ2 + (23 + 20µ+ 2µ2)λ+ 14µ+ 2µ2
2µ3 (1− s)2 + · · · .
The leading order term of ∂u/∂r evaluated at r = 1 generated from Equation (3.45) isthe same as the leading order term of ∂u/∂r evaluated at r = 1 generated from Equation(3.34) for n = 1. Also rewriting Equation (3.44) in terms of s and expanding as s → 1−
61

by a Taylor series, each order term of τ gives
τ0 = λ
µ2
{µ(1− s) + 1
2λ(1− s)2 − 13λ(1− s)3
},
τ1λ
= λ
µ2
{12(1− s)2 −
(λ+ µ
3µ
)(1− s)3 +O((1− s)4)
}, and
τ2λ2 = λ
µ2
{− 1
3µ(1− s)3 +O((1− s)4)},
correspondingly. Hence the asymptotic solutions obtained from the first time scale forthe large Stefan number are consistent with the asymptotic solutions of the small timeanalysis.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.2
0.4
0.6
0.8
1
t
s
(a) The time history of moving solid-melt boundary s
t
t =0.01
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
r
u
(b) The temperature profiles versus r at times t = 0.01, 0.1, 0.5, 1, 1.5, 1.8 and1.9124
Figure 3.7: The comparison of the numerical solutions of the problem (3.6)–(3.10) (bluesolid) computed for µ = 0.1 and λ = 10 with the asymptotic results (3.45) and (3.44)(black dashes).
62

Now we compare the numerical results with the asymptotic results of the first time scalefor large λ (3.45) and (3.44) in Figure 3.7. In Figure 3.7(a) the blue solid curve and theblack dashed curve are indistinguishable except for times close to the complete meltingtime tf . Similarly in Figure 3.7(b) the two coloured curves are indistinguishable for mosttimes except for times close to the complete melting time tf . Hence the asymptotic resultsof the first time scale for this moderately large λ provide remarkably good comparison tothe numerical results of the problem (3.6)–(3.10). This divergence between the numericalresults and the asymptotic results of the first time scale for large λ suggests another timescale after the first time scale.
3.4.2 The second time scale t = O(λ)
The time scale followed the first time scale t = O(µ2/λ) is t = O(λ) with 1 − s is O(1).The working of this time scale is almost identical to the classical one-phase problem inRiley et al. (1974). The temporal variable in problem (3.6)–(3.10) is now rescaled as
t = t
λ.
After transforming τ(σ) to t(s) and expanding as λ → ∞, the initial condition of t ass→ 1 will emerge and t should appear similarly as
t ∼16 −
s2
2 + s3
3 +[µ(1− s) + 1
6(1− s)2] 1λ
+ 15sµ(1− s)− (1− s)2
45s1λ2 +O
( 1λ3
).
The problem (3.6)–(3.10) is transformed into
∂2u
∂r2 + 2r
∂u
∂r= 1λ
∂u
∂s
1t′(s)
in s < r < 1, (3.46)
u = 1 at r = 1, (3.47)
un = −µλ
1t′(s)
at r = s, (3.48)
∂u
∂r= −
(1 + u
λ
) 1t′(s)
at r = s. (3.49)
The variable u is now a function of the independent variable r and s instead of r and t.The role of t and s are exchanged hence t is now a function of s. The variables u and t
in Equations (3.46)–(3.49) are expanded in a power series of 1/λ as
u = u0(r, s) + u1(r, s) 1λ
+ · · · ,
t = t0(s) + t1(s) 1λ
+ · · · ,
and substituted back to Equations (3.46)–(3.49) to obtain the solutions of the asymptoticseries.
63

The system of equations for leading order with n = 1 is
∂2u0∂r2 + 2
r
∂u0∂r
= 0 in s < r < 1,
u0 = 1 at r = 1,
u0 = 0 at r = s,
∂u0∂r
= − 1t′0
at r = s,
t0 = 0 as s→ 1,
the system of equations for the first correction terms with n = 1 is
∂2u1∂r2 + 2
r
∂u1∂r
= 1t′0
∂u0∂s
in s < r < 1,
u1 = 0 at r = 1,
u1 = − µt′0
at r = s,
∂u1∂r
= − u0
t′0
+ t′1
(t′0)2 at r = s,
t1 = 0 as s→ 1,
and the system of equations for the second correction terms with n = 1 is
∂2u2∂r2 + 2
r
∂u2∂r
= 1t′0
∂u1∂s− t
′1
(t′0)2∂u0∂s
in s < r < 1,
u2 = 0 at r = 1,
u2 = µt′1
(t′0)2 at r = s,
∂u2∂r
= −1t′0
( t′1t′0
)2
− t′2t′0− t
′1t′0u0 + u1
at r = s,
t2 = 0 as s→ 1.
The solution of each order in the asymptotic series of u and t are calculated from thecorresponding differential equations by using integrating factor method. Therefore theasymptotic series of u and t based on large λ for Equations (3.46)–(3.49) with n = 1 are
u =1− s(1− r)(1− s)r −
{1− r
6(1− s)sr
[1−
(1− r1− s
)2]
+(
1− 1r
)µ
(1− s)2
}1λ
+{(1− r)
(1− s)s3r
{ 136
[1−
(1− r1− s
)2 ]+ 3− 4(1− s)
120
[1−
(1− r1− s
)4 ]}+
[(1 + 2s)(1− r)(2− r)6s2(1− s)4 − (4− s)(1− r)
6rs(1− s)4
]µ− 1− r
rs(1− s)3µ2}
1λ2 +
O(λ−3), (3.50)
64

t =3(1− s)2 − 2(1− s)3
6 +[
(1− s)2
6 + µ(1− s)]
1λ
+[−145
(1− s)2
s+ µ(1− s)
3
]1λ2 +O(λ−3). (3.51)
Surprisingly the parameter µ does not appear in the leading order term of u and t whichsuggests the kinetic parameter µ has a weak effect in the second time scale. In additionEquations (3.50)–(3.51) reduce to the results in Riley et al. (1974) for the classical Stefanproblem in the limit µ→ 0+.
The ∂u/∂r evaluated at r = 1 is
∂u
∂r
∣∣∣∣r=1
= s
1− s +[ 1
6s(1− s) −µ
(1− s)2
] 1λ
+ · · · .
The leading order term of ∂u/∂r after expanding as s→ 1− by Taylor series and evaluatingat r = 1 is
−1 + 11− s,
which approaches infinity as s→ 1− and is undefined at s = 1. The first correction termof ∂u/∂r after expanding as s→ 1− by Taylor series and evaluating at r = 1 is
−µ(1− s)2 + 1
6(1− s) + 16 + 1− s
6 +O((1− s)2
),
which also approaches infinity as s → 1− and the speed is faster than the leading orderterm. Consequently the second time scale for the large Stefan number does not resolvethe small time behaviour of problem (3.6)–(3.10).
Now we compare the numerical results with the asymptotic results of the second timescale for large λ (3.50) and (3.51) in Figure 3.8. In Figure 3.8(a) the blue solid curve andthe black dashed curve are indistinguishable except for times close to the complete meltingtime tf . Similarly in Figure 3.8(b) the two coloured curves are indistinguishable for mosttimes except for times close to the complete melting time tf . Specifically the asymptotictemperature profile at t = tf is not depicted in Figure 3.8 because it totally diverges fromthe numerical result and monotonically increases from r = 0. From observing Figure 3.8,the asymptotic results of the second time scale for this moderately large value (λ = 10)provide good comparison to the numerical results of the problem (3.6)–(3.10) howeverthese asymptotic results (second time scale) do not provide further information aboutthe behaviour of the one-phase Stefan problem with kinetic undercooling as the movingboundary approaches 0 than the asymptotic results of the first time scale. This divergencebetween the numerical results and the asymptotic results of the second time scale for largeλ suggests the need of another time scale after the second time scale.
Riley et al. (1974) studied the problem (3.1)–(3.5) for inward solidification with the di-mensionless parameter t = t/λ and indicated the asymptotic solutions generated from the
65

straightforward approach break down as time approached the complete solidifying timetf . In other words, when the moving solid-melt boundary approaches the centre of thesolidifying sphere (s → 0), the asymptotic solutions start to diverge which represents asingularity in the solutions generated by the straightforward approach.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.2
0.4
0.6
0.8
1
t
s
(a) The time history of moving solid-melt boundary s
t
t =0.01
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
r
u
(b) The temperature profiles versus r at times t = 0.01, 0.1, 0.5, 1, 1.5, 1.8 and1.9124
Figure 3.8: The comparison of the numerical solutions of the problem (3.6)–(3.10) (bluesolid) computed for µ = 0.1 and λ = 10 with the asymptotic results (3.50) and (3.51)(black dashes).
This singularity also happens to the asymptotic solutions of Equations (3.46)–(3.49) forn = 1 when the moving solid-melt boundary is near the centre (s → 0). Therefore weadopt the approach taken by Riley et al. (1974) and propose another time scale when themoving solid-melt boundary is near the centre to deal this singularity.
66

3.4.3 The third time scale
The third time scale occurs at time close to the complete melting time tf . Simultaneouslythe solid-melt boundary is reaching the centre hence the third time scale is
tf − t = O(1), and s = O(λ−1/2).
The location of the solid-melt boundary in problem (3.6)–(3.10) is now rescaled as
s = 1λ1/2 s,
where s = O(1). In the third time scale, the spatial domain is considered having tworegions, I and II. The inner region I is in the vicinity of the moving solid-melt boundary[ie, r = O(λ−1/2)], while region II is r = O(1). This scaling is the same as the one used byRiley et al. (1974), Stewartson and Waechter (1976) and Soward (1980) for the classicalone-phase Stefan problem (µ = 0). In this time scale the solid-melt boundary starts tospeed up again, hence the leading order problem in the region I is quasi-steady. Howeverthe leading order problem in region II is not quasi-steady.
In region I, a new dimensionless spatial variable is introduced as
r = λ1/2r.
Within region I, Equations (3.6)–(3.10) are transformed into
∂2u
∂r2 + 2r
∂u
∂r= 1λ2∂u
∂s
1t′(s)
in s < r <∞, (3.52)
un = − µ
λ3/21
t′(s)at r = s, (3.53)
∂u
∂r= −
(1 + u
λ
) 1λ
1t′(s)
at r = s. (3.54)
The variables u and t in Equations (3.52)–(3.54) are now expanded as
u = u0(r, s) + u1(r, s) 1λ1/2 + u2(r, s) 1
λ+ · · · ,
t = 16 + t0(s)
λ+ t1(s)λ3/2 + · · · ,
and substituted back to Equations (3.52)–(3.54) to obtain the solution of each term inthe asymptotic series. The expression of 1/t′(s) in Equations (3.52)–(3.54) is
1t′(s)
= λ
t′0
1− t′1t′0
1λ1/2 +
( t′1t′0
)2
− t′2t′0
1λ
+
2t′1t′2
t′20−(t′1t′0
)3
− t′3t′0
1λ3/2 + · · ·
.
67

The system of equations for leading order with n = 1 is
∂2u0∂r2 + 2
r
∂u0∂r
= 0 in s < r <∞,
u0 = 0 at r = s,
∂u0∂r
= − 1t′0
at r = s,
and the system of equations for the first correction terms with n = 1 is
∂2u1∂r2 + 2
r
∂u1∂r
= 0 in s < r <∞,
u1 = − µt′0
at r = s,
∂u1∂r
= t′1t′20
at r = s.
The solution of the first two orders in the asymptotic series of u are calculated from thecorresponding differential equations by using integrating factor method.
The asymptotic series of u in the region I for the third time scale is
u =(1s− 1r
)B0(s) +
[(1s− 1r
)B1(s)− µ
t′0
]1λ1/2 + · · · ,
where
B0 = − s2
t′0
& B1 = s2t′1
t′20.
Using the idea of matched asymptotic expansions, the limit of t0(s) and t1(s) as s → ∞are derived by substituting s = sλ−1/2 into the second time scale asymptotic solution t
to give
t0 ∼1− 3s2
6 + µ, and t1 ∼s3 − s
3 − 145s − µs as s→∞. (#)
In region II, the governing PDE is
∂2u
∂r2 + 2r
∂u
∂r= 1λ
∂u
∂s
1t′(s)
in 0 < r < 1, (3.55)
and the variable u is now expanded as
u = 1 + u0(r, s) 1λ1/2 + u1(r, s) 1
λ+ · · · .
68

The system of equations for leading order is
∂2u0∂r2 + 2
r
∂u0∂r
= −1s
∂u0∂s
in 0 < r < 1, (3.56)
u0 = 0 at r = 1, (3.57)
u0 ∼ −s
r+ t
′1s
+ µ
sas r → 0, (3.58)
u0 ∼ −s(1− r)
r− 1− r
6sr[1− (1− r)2
]+ 1− r
rs3
{[1− (1− r)2]
36 −[1− (1− r)4]
120
}as s→∞. (3.59)
Equation (3.58) is derived from matching the asymptotic series of u in the region I to theleading order in the region II. B0 = s is obtained during the derivation of Equation (3.58)and results t′0 = −s and and B1 = t
′1. After integration and matching the limit of t0 as
s→∞, t0 is
t0 = 1− 3s2
6 + µ. (3.60)
Equation (3.59) is derived from matching the asymptotic series of u in the second timescale to the leading order in the third time scale.
A new independent variable x is introduced as
x = 1− r.
The purpose of introducing x is to simplify the Equation (3.59). A new variable F (x, s)is introduced to replace u0(r, s) and the relation between these two variables is
F (x, s) = (1− x)u0(r, s).
The purpose of introducing F is to simplify the Equation (3.56). The system of equationsfor leading order based on the new variable F and the new independent variable x is
∂2F
∂x2 = −1s
∂F
∂sin 0 < x < 1, (3.61)
F = 0 at x = 0, (3.62)
F ∼ −s as x→ 1, (3.63)
F ∼ −sx− x
6s(1− x2) + x
s3
[(1− x2)
36 − (1− x4)120
]as s→∞. (3.64)
Another new dependent variable q is introduced as
q = s2.
The purpose of introducing q is to simplify the Equation (3.61).
69

The system of equations for leading order based on the variable F , the independentvariable x and the dependent variable q is
∂2F
∂x2 = −2∂F∂q
in 0 < x < 1, (3.65)
F = 0 at x = 0, (3.66)
F ∼ −q1/2 as x→ 1, (3.67)
F ∼ −q1/2x as q →∞. (3.68)
Equations (3.65)–(3.68) are solved by finite Fourier transform. The finite Fourier sine-transform of F is
F (m, q) =∫ 1
0F (x, q) sin(mπx)dx,
and the inverse finite Fourier sine-transform of F is
F (x, q) = 2∞∑m=1
F (m, q) sin(mπx).
The resultant equation after applying finite Fourier sine-transform on Equation (3.65) is
dFdq −
m2π2
2 F (m, q) = −mπ2 q1/2 cos(mπ), (3.69)
and the general solution of Equation (3.69) is
F (m, q) =em2π2q
2
∫ q
∞−mπ2 cos(mπ)u1/2e−
m2π2u2 du+Ae
m2π2q2 ,
=mπ
2 (−1)mem2π2q
2
∫ ∞q
u1/2e−m2π2u
2 du+Aem2π2q
2 , (3.70)
where cos(mπ) is equal to (−1)m. The value of constant A in Equation (3.70) is obtainedby three steps. The first step is applying the integration by parts on Equation (3.70)therefore the general solution of F is
F (m, q) =(−1)m q1/2
mπ+ (−1)m
2mπ em2π2q
2
∫ ∞q
u−1/2e−m2π2u
2 du+Aem2π2q
2 . (3.71)
The second step is taking the inverse finite Fourier sine-transform on Equation (3.71)hence the general solution of F is
F (x, q) =2q1/2∞∑m=1
(−1)m
mπsin(mπx) +
∞∑m=1
(−1)m
mπem2π2q
2
∫ ∞q
u−1/2e−m2π2u
2 du sin(mπx)+
2A∞∑m=1
em2π2q
2 sin(mπx). (3.72)
The final step is evaluating Equation (3.72) for q → ∞ and the result is matched withEquation (3.68).
70

Consequently the value of A is 0 and the expression
x = 2∞∑m=1
(−1)m+1
mπsin(mπx)
is obtained through matching. There are two forms of solution for F . One is
F = 2√
2∞∑m=1
(−1)m
m2π2 em2π2q
2 Γ(
32 ,m2π2q
2
)sin(mπx), (3.73)
which is generated by substituting u with m1 = m2π2u/2 in Equation (3.70), using thedefinition of upper incomplete gamma function and taking the inverse finite Fourier sine-transform. The other one is
F = 2√q∞∑m=1
(−1)m
mπsin(mπx) +
( 2π3
)1/2 ∞∑m=1
(−1)m
m2 em2π2q
2 erfc(mπ√q√
2
)sin(mπx),
(3.74)
which is generated by substituting u with m2 = nπ√u/√
2 in Equation (3.72) and usingthe definition of complementary error function. Therefore the solution of u0(r, s) is
u0 = −(1r− 1
)s− 1
r
( 2π3
)1/2 ∞∑m=1
em2π2s2
2
m2 erfc(mπs√
2
)sin(mπr), (3.75)
and t′1 is
t′1 = s2 − s
( 2π
)1/2 ∞∑m=1
em2π2s2
2
merfc
(mπs√
2
)− µ, (3.76)
which is obtained by evaluating u0(r, s) for r → 0 and matching with Equation (3.58).Hence the solution of t1 after integrating Equation (3.76) is
t1 = s3
3 −s
3 −( 2π5
)1/2 ∞∑m=1
em2π2s2
2
m3 erfc(mπs√
2
)− µs. (3.77)
Now the asymptotic series of u in region II for the third time scale is
u = 1−
(1r− 1
)s+ 1
r
( 2π3
)1/2 ∞∑m=1
em2π2s2
2
m2 erfc(mπs√
2
)sin(mπr)
1λ1/2 + · · · ,
(3.78)
the asymptotic series of u in region I for the third time scale is
u = 1− s
r+
(1s− 1r
)s2 − s( 2π
)1/2 ∞∑m=1
em2π2s2
2
merfc
(mπs√
2
)− µ
+ µ
s
1λ1/2 + · · · ,
(3.79)
71

and the asymptotic series of t in the third time scale is
t = 16 + 1− 3s2 + 6µ
6λ +
s3
3 −s
3 −( 2π5
)1/2 ∞∑m=1
em2π2s2
2
m3 erfc(mπs√
2
)− µs
1λ3/2 + · · · .
(3.80)
From the result the kinetic parameter µ has a weak effect on the asymptotic results ofthe third time scale. Equations (3.78)–(3.80) are reduced to the results of classical Stefanproblem given in Riley et al. (1974), Stewartson and Waechter (1976) and Soward (1980)if the kinetic parameter µ is set to zero. The approximate complete melting time tf iscalculated by taking s→ 0 in Equation (3.80) and it is
tf ∼16λ+ 1
6 + µ−√
2ζ(3)π5/2λ1/2 +O(λ−1), (3.81)
where ζ(z) is the Riemann zeta function. Also the outer solution of u reduces to
u(r, tf ) ∼ 1− 1λ1/2
[√2π
(1 + ln
( 1πr
))+O(r2)
], (3.82)
as r → 0 when the solid-melt boundary approaches 0. The component ln(1/πr) in Equa-tion (3.82) becomes unbounded as r approaches the centre of the sphere therefore thethird time scale is not uniformly valid and the limit r → 0 is not commuted to the limitλ → ∞. In addition Equation (3.82) is order of r2 but Soward (1980) has order of r forthe classical Stefan problem which is believed as a typographical error. In addition thematching condition limit (#) in the third time scale and Equation (3.59) can be derivedfrom solutions of the first time scale without any reference to the second time scale so itturns out the second time scale (for µ 6= 0) is not necessary.
Now we compare the numerical results with the asymptotic results of the third time scalefor large λ of (3.78), (3.79) and (3.80) in the following figures. Under the scale used inFigure 3.9 the blue solid curve and the black dashed curve are indistinguishable. Hencethe asymptotic result of the third time scale for large λ provides good comparison to thenumerical solid-melt boundary s near the centre of the melting ice ball. We then comparethe numerical solution with asymptotic results of the third time scale on the temperatureprofiles at different times in Figure 3.10. The blue solid curve and red dashed curve areonly indistinguishable near the solid-melt boundary for most of the chosen times except attime t = 17.8. The blue solid curve and black dotted curve are only distinguishable nearthe solid-melt boundary s and the difference between the two coloured curves increasesas time proceeds. From observing Figure 3.9 and 3.10, the asymptotic results of the thirdtime scale for large λ provide good comparison to the numerical results of the problem(3.6)–(3.10) when the moving solid-melt boundary approaches 0 however these asymptoticsolutions still cannot depict the temperature profiles of the one-phase Stefan problem withkinetic undercooling that are extremely close to the complete melting time t = tf . Hencethis divergence between the numerical and the asymptotic results of the third time scalefor large λ suggests the need of an extremely small time scale just before t = tf .
72

17 17.1 17.2 17.3 17.4 17.5 17.6 17.7 17.80
0.02
0.04
0.06
0.08
0.1
0.12
t
s
Figure 3.9: The comparison of the numerical solution of the problem (3.6)–(3.10) (bluesolid) computed for µ = 1 and λ = 100 with the asymptotic result (3.80) (black dashes)on the time history of moving solid-melt boundary s.
0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
r
u
0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
r
u
0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
r
u
0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
r
u
Figure 3.10: The comparison of the numerical solutions of the problem (3.6)–(3.10) (bluesolid) computed for µ = 1 and λ = 100 with the asymptotic results (3.79) (red dashes)and (3.78) (black dots) on the temperature profiles at times t = 17.2, 17.4, 17.6 and17.8. The top two graphs are the temperature profiles at times t = 17.2 and 17.4 and thebottom two graphs are the temperature profiles at times t = 17.6 and 17.8.
73

3.5 Effect of µ
The main difference between the classical one-phase Stefan problem and the one-phaseStefan problem with kinetic undercooling is the inclusion of kinetic undercooling µ at themoving solid-melt boundary. The one-phase Stefan problem with kinetic undercooling isreduced to the classical one-phase Stefan problem if the kinetic undercooling µ is set tozero. There is an unphysical singularity in the classical one-phase Stefan problem whenthe time approaches the complete melting time tf . It is known that the addition of surfacetension to the classical one-phase Stefan problem via the Gibbs-Thomoson condition doesnot regularise this singularity. Hence the effect of adding µ to the classical one-phaseStefan problem on this unphysical singularity is investigated here.
0 0.05 0.1 0.15 0.2 0.250
0.2
0.4
0.6
0.8
1
t
s
(a) The time history of moving solid-melt boundary s
0 0.05 0.1 0.15 0.2 0.25 0.30
2
4
6
t
ln∣∣ds
dt∣∣
(b) The evolution of the speed of solid-melt boundary s
Figure 3.11: The comparison of the classical one-phase Stefan problem, µ = 0 (red solidcurve) and one-phase Stefan problem with kinetic undercooling, µ = 0.01 (blue dashedcurve) on the moving solid-melt boundary s with λ = 1.
74

Figure 3.11(a) represents the numerical results of the moving solid-melt boundary s versustime for the classical one-phase Stefan problem (µ = 0) and one-phase Stefan problemwith kinetic undercooling (µ = 0.01). Under the scale used in Figure 3.11(b) the redsolid curve and the blue dashed curve are indistinguishable until time t is over 0.15.As the solid-melt boundary approaches 0, the centre of the ice ball, both curves reachthe corresponding complete melting time tf and the difference between these two curvesincreases steadily. The inherent non-physical singularity in the classical one-phase Stefanproblem is not depicted in Figure 3.11(a). The inherent non-physical singularity in theclassical one-phase Stefan problem is examined on the evolution of the speed of solid-meltboundary s and the temperature profiles u versus r as the moving boundary approachesto 0. Figure 3.11(b) represents the numerical results of the moving solid-melt boundaryspeed ds/dt versus time for the classical one-phase Stefan problem and one-phase Stefanproblem with kinetic undercooling. As the time t approaches the complete melting timetf , the red solid curve approaches infinity and the blue dashed curve only approaches afinite value. Hence the unphysical speed of the moving solid-melt boundary in the classicalone-phase Stefan problem is regularised by the addition of kinetic undercooling.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40
2
4
6
t
ln∣∣ds
dt∣∣
Figure 3.12: The comparison of the classical one-phase Stefan problem, µ = 0 (red solidcurve) and one-phase Stefan problem with kinetic undercooling, µ = 0.1 (blue dashedcurve) on the evolution of the speed of solid-melt boundary s with λ = 1.
Now we compare the classical one-phase Stefan problem (µ = 0) with the one-phaseStefan problem with kinetic undercooling that has a larger value of µ, on the speed ofthe solid-melt boundary s in Figure 3.12. The red solid curve and the blue dashed curveare distinguishable at all times in Figure 3.12. The blue dashed curve starts with a finitevalue and ends with a finite value too. As expected, the speed of the solid-melt boundarys in the one-phase Stefan problem with kinetic undercooling (blue dashed curve) remainsfinite at time t = tf . Interestingly the initial speed of the solid-melt boundary s in theone-phase Stefan problem with kinetic undercooling decreases as µ increases which isconsistent with the small time analysis in Section 3.3.
75

The inherent non-physical singularity in the classical one-phase Stefan problem also de-picts by the leftmost curve in Figure 3.13(a) which appears to have an infinite sloper = 0. This singularity in Figure 3.13(a) is magnified in Figure 3.13(b). The inherentnon-physical singularity is obviously depicted by the leftmost curve in Figure 3.13(b). InFigure 3.13(b) the temperature gradient at r = s approaches infinity when the solid-meltboundary approaches zero.
t
t = 0.045
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
r
u
(a) The temperature profiles versus r
t
t = 0.27507
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.040
0.05
0.1
0.15
0.2
r
u
(b) The temperature profiles versus r
Figure 3.13: The numerical profiles of temperature u versus r for µ = 0 and λ = 1. (a)From right to left, temperature profiles are shown for times t = 0.045, 0.135, 0.225, 0.27,and 0.27513. (b) From right to left, temperature profiles are shown for times t = 0.27507,0.2751, and 0.27513.
Figure 3.14(a) and 3.14(b) represent the numerical temperature profiles of the one-phaseStefan problem with kinetic undercooling for µ = 0.01 and λ = 1. Figure 3.14(b) is theclose-up view of Figure 3.14(a) near r = 0. Each blue dashed curve in Figure 3.14(a)and 3.14(b) does not reach the r-axis because the boundary condition at the solid-melt
76

boundary is a Robin boundary condition instead of the Dirichlet boundary condition usedin the classical one-phase Stefan problem. In Figure 3.14(a) and 3.14(b), the temperaturegradient at r = s only approaches a finite value as the solid-melt boundary approaches tozero.
t = 0.045
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
r
u
t
(a) The temperature profiles versus r
t = 0.28901
0 0.01 0.01 0.02 0.02 0.03 0.03 0.04 0.040.2
0.22
0.24
0.26
0.28
0.3
r
ut
(b) The temperature profiles versus r
Figure 3.14: The numerical profiles of temperature u versus r for µ = 0.01 and λ = 1. (a)From right to left, temperature profiles are shown for times t = 0.045, 0.135, 0.225, 0.27,and 0.27513. (b) From right to left, temperature profiles are shown for times t = 0.28901,0.28904, and 0.28907.
Figure 3.15 provides a close-up view of the temperature profiles for the classical one-phase Stefan problem and one-phase Stefan problem with kinetic undercooling together.It clearly shows that the kinetic undercooling µ > 0 regularises the flux singularity ofthe classical one-phase Stefan problem at the complete melting time t = tf . Hence, fromobserving Figures 3.11(b)–3.15, the addition of kinetic undercooling µ > 0 regularises theunphysical singularity in the classical one-phase Stefan problem at the complete melting
77

time t = tf . Also, the addition of kinetic undercooling regularises the initial speed of thesolid-melt boundary in the classical one-phase Stefan problem.
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
0.1
0.2
0.3
r
u
Figure 3.15: The comparison of the classical one-phase Stefan problem, µ = 0 (red solidcurves) and one-phase Stefan problem with kinetic undercooling, µ = 0.01 (blue dashedcurves) on the temperature profiles for λ = 1 near the complete melting time t = tf , fors = 0, 0.025 and 0.05.
3.6 Conclusion
The melting problem of a homogeneously frozen ball involves phase change and has beenmodelled as the classical one-phase Stefan problem. This classical one-phase Stefan prob-lem has been studied extensively by mathematicians in the past and it has been re-ported that an unrealistic singularity existed in the problem at the complete melting time.This unrealistic singularity appears in the temperature gradient at the moving solid-meltboundary and the speed of the moving solid-melt boundary as the time approaches thecomplete melting time t = tf . Mathematicians have tried to regularise this unrealistic sin-gularity by adding the surface tension to the classical one-phase Stefan problem throughGibbs-Thomson condition however this attempt actually makes the singularity worse.
In this chapter we have investigated the effect of including the kinetic undercooling tothe melting problem and this modified problem is called the one-phase Stefan problemwith kinetic undercooling. Additionally we note that the one-phase Stefan problem withkinetic undercooling also describes the solvent penetration into the polymer in the contextof drug delivery from a polymeric carrier. The one-phase Stefan problem with kinetic un-dercooling is a moving boundary problem and differs from the classical one-phase Stefanproblem at the boundary conditions of the moving solid-melt boundary. These two prob-lems are both solved numerically using a front-fixing transformation together with finitevolume discretisation method and the numerical results of these two problems are com-pared to investigate the effect of adding kinetic undercooling. We find out the additionof kinetic undercooling µ > 0 regularises the unphysical speed of the moving solid-meltboundary and temperature gradient at the moving solid-melt boundary in the classical
78

one-phase Stefan problem as the time approaches the complete melting time. We alsodiscover the addition of kinetic undercooling µ > 0 reduces the initial speed of the movingsolid-melt boundary which agrees with small time asymptotic analysis.
We analyse the one-phase Stefan problem with kinetic undercooling asymptotically forearly melting and large Stefan number. From investigating the small time behaviour, thespeed of the moving solid-melt boundary ds/dt is finite and O(1) as t → 0+ which isdifferent to the classical one-phase Stefan problem (µ = 0). In the classical one-phaseStefan problem, ds/dt approaches negative infinity as t → 0+. Hence we observe thetransition to a completely different qualitative behaviour in the small time analysis asthe important kinetic parameter vanishes and find out the effect of including the kineticundercooling at the solid-melt boundary regularises the classical one-phase Stefan problemin the small time limit. In the context of solvent penetrating into a glassy polymer, thespeed of the moving boundary ds/dt is O(1) as t→ 0+ which agrees to the experimentalevidences stated in Astarita and Sarti (1978).
For the large Stefan number limit, we extend the analysis by matched asymptotics in orderto handle the moving solid-melt boundary approaching the centre of the sphere. Threetime scales are proposed for investigating the one-phase Stefan problem with kineticundercooling asymptotically in the limit of large Stefan number. The first time scaleworks remarkably well and breaks down when the solid-melt boundary approaches 0 andis the same one used by Lin and Peng (2005). We provide another two correction termsof this time scale for the case n = 1 that are not treated in Lin and Peng (2005). Thesecond and third time scales mimic the asymptotic analyses of the classical one-phaseStefan problem (µ = 0) in Riley et al. (1974) and Soward (1980). We observe the effectof µ decreases to the extent that the leading order term of the second and third timescales do not depend on µ at all. Other the other hand, we expect the effect of µ becomescrucial again for times extremely close to the complete melting time t = tf according tothe numerical results and this parameter is important for the near complete melting limit.
Lastly the parameter µ can regularise the non-physical singularity occurred in the clas-sical one-phase Stefan problem. Therefore the one-phase Stefan problem with kineticundercooling provides physically more realistic solutions for a melting problem than theclassical one-phase Stefan problem.
79

Chapter 4
Radially-symmetric melting problem with a Gibbs-Thomsoncondition
In Chapter 3, the one-phase Stefan problem of melting a particle was investigated byusing both formal asymptotics and numerical computation. That work extends previousstudies as it includes the effects of kinetic undercooling. In the context of this thesis, themotivation for Chapter 3 was in part because the same model applies to the problem ofsolvent penetrating into a polymer ball. This model, together with some generalisations, isused later in Chapters 5–7 to help describe drug diffusion from a spherical drug deliverydevice. Furthermore, from a Stefan problem point of view, the study in Chapter 3 isinteresting in its own right, as kinetic undercooling is known to be important undercertain scenarios when melting particles.
When melting very small particles, it is known that surface tension effects are also im-portant. Indeed, there are many studies of Stefan problems that include surface tensionin the model, e.g. Friedman and Reitich (1991), Wu et al. (2002), and Wu et al. (2009).In particular, we note the one-phase problem of melting a spherical particle with surfacetension effects was treated by Wu et al. (2009). In the present chapter, we extend thestudy of Wu et al. (2009) with surface tension to include kinetic undercooling. In otherwords, we extend the study in Chapter 3 with kinetic undercooling to include surfacetension.
4.1 Stefan problem with surface tension
Nanoparticles have attracted the attention of various researchers in past decades due totheir unique physical and chemical properties . One particularly interesting character-istic of nanoparticles is that the melting temperature is size-dependent (Wronski, 1967;Buffat and Borel, 1976). Thus when modelling the melting a radially symmetric nano- ormicroparticle, one needs to include size-dependent effects via Gibbs–Thomson effect
U(S, T ) = U∗(
1− ω
S
), ω = 2α
ρs, (4.1)
which is discussed by Langer (1980). This relation states that as the particle radius Sreduces, the melting temperature is reduced. Here, ρs is the mass density of the materialin the solid phase and α is the interfacial surface tension coefficient.
80

Recently, Wu et al. (2009) treat the one-phase Stefan problem for melting a nanoparticle,including surface tension via (4.1). As with Chapter 3, the problem describes a sphere ofsolid homogeneous material with radius S(0) which is initially at the fusion temperatureU∗. The surface of the sphere is raised to U0 > U∗ such that the sphere begins to melt.During the melting process, an interface denoted by R = S(T ) moves from the outerwall to the centre, separating the inner region of solid 0 < R < S(T ) from the outerregion of liquid S(T ) < R < S(0). The complete governing equations for modellingthe temperature distribution of the liquid phase U(R, T ) are scaled with the followingdimensionless variables
r = R
S(0) , t = DT
S2(0) , u = U − U∗[1− ω/S(0)]U0 − U∗[1− ω/S(0)] , and s(t) = S(T )
S(0) .
With these variables, the one-phase problem treated in Wu et al. (2009) is
∂u
∂t= 1r2
∂
∂r
(r2∂u
∂r
)in s(t) < r < 1, (4.2)
u = 1 at r = 1, (4.3)
u = σ
(1− 1
s
)at r = s(t), (4.4)
∂u
∂r= −(u+ λ)ds
dt at r = s(t). (4.5)
There are two dimensionless parameters in problem (4.2)–(4.5); they are
σ = ωU∗
{U0 − U∗[1− ω/S(0)]}S(0) , and λ = L
cp {U0 − U∗[1− ω/S(0)]} ,
where L is the latent heat of fusion per unit mass absorbed during the melting process andcp is the specific heat of the liquid at constant pressure. These dimensionless parametersare named, respectively, as the surface tension coefficient and the Stefan number, whichrepresents the ratio of latent to sensible heat.
Representative numerical solutions of (4.2)–(4.5) are showed in Figures 4.1 and 4.2. TheFigure 4.1 plots the profiles of u versus r where the melting temperature u(s, t) follows(4.4). At a first glance, this equation suggests that the melting temperature u(s, t)→ −∞as s→ 0; however, for this problem it turns out the interface s does not reach the centreof the particle, and so the melting temperature u(s, t) remains bounded. The reason isthat the problem exhibits finite-time blow-up, which means the solution ceases to existat a time sc and that s = sc > 0 at tc. The blue dashed profile in Figure 4.1 is the profileat the blow-up time which for these parameter values is tc = 0.17.
Figure 4.2 shows the position of the moving boundary s versus time t and the interfacespeed ds/dt versus s for λ = 1 with varying values of σ. A characterising feature of thefinite-time blow-up is that the speed of the moving interface ds/dt→ −∞ as s→ s+
c andt → t−c . In Figure 4.2 we see this critical position sc is always larger than zero. We alsosee the interface speed blowing up before the interface reached the centre of the particle
81

t
t = 0.05
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−1
−0.5
0
0.5
1
r
u
Figure 4.1: Numerical profiles of u versus r of problem (4.2)–(4.5) for λ = 1 and σ = 0.15.From right to left, profiles are for t = 0.05, 0.1, 0.15, and 0.17(blue dashes).
for each parameter set. Further, the interface speed blows up earlier and the value of sc
is larger as the value of σ increases. Indeed, sc is calculated as
sc = σ
σ + λ, (4.6)
because u(sc, tc) = −λ as depicted in Figure 4.1.
0 0.1 0.2 0.30
0.2
0.4
0.6
0.8
1
Time t
s(t)
0 0.2 0.4 0.6 0.8 1−10
−8
−6
−4
−2
s
dsdt
Figure 4.2: Numerical results of problem (4.2)–(4.5) for λ = 1 and for σ = 0(loosely bluedashes), 0.01(red solid), 0.05(loosely green dots), 0.15(magenta dashes) and 0.5(blackdots). The left graph is the numerical position of the moving boundary versus time. Theright graph is the numerical speed of the moving boundary versus the numerical positionof the moving boundary.
This phenomenon is interesting because the problem (4.2)–(4.5) for σ = 0 is well-posed,with the solution existing for all time up to t = tf (that is, up to the time of completemelting). But the problem (4.2)–(4.5) for σ 6= 0 becomes ill-posed when surface tensionis included, at least in the sense that the solution now blows up in finite time. Normally,adding surface tension to a physical problem makes it less likely to be ill-posed, not more
82

likely. This form of blow-up may be unphysical. In this context, it is of interest to seewhat happens when kinetic undercooling is added to the model with surface tension.
4.2 Stefan problem with surface tension and kinetic undercooling
The problem in Chapter 3 is a radially-symmetric one-phase Stefan problem with kineticundercooling; the problem in Wu et al. (2009), and described above in Section 4.1, is aradially-symmetric one-phase Stefan problem with surface tension. The purpose of thischapter is to generalise these two problems so that we consider the radially-symmetricone-phase Stefan problem with surface tension and kinetic undercooling. The full Gibbs-Thomson condition is
U(S, T ) = U∗(
1− ω
S
)− 1k1
dSdT , ω = 2α
ρs, (4.7)
Langer (1987). The full dimensionless one-phase Stefan problem is
∂u
∂t= 1r2
∂
∂r
(r2∂u
∂r
)in s(t) < r < 1, (4.8)
u = 1 at r = 1, (4.9)
u = −µdsdt + σ
(1− 1
s
)at r = s(t), (4.10)
∂u
∂r= −(u+ λ)ds
dt at r = s(t). (4.11)
There is one more dimensionless parameter in (4.8)–(4.11) than (4.2)–(4.5), namely
µ = D
k1 {U0 − U∗[1− ω/S(0)]}S(0) .
where k1 is the dimensional kinetic undercooling coefficient. This extra dimensionlessparameter is named the kinetic undercooling coefficient.
In the following two sections, the problem (4.8)–(4.11) is investigated. The numericalscheme used is the front fixing method and method of lines with finite difference spatialdiscretisation discussed thoroughly in Section 3.2. The hypothesis of this generalisedStefan problem is that the addition of kinetic undercooling will regularise the blow-upbehaviour.
4.3 Numerical results
The problem (4.8)–(4.11) is solved in MATLAB using the numerical scheme describedin Section 3.2. The effect of kinetic undercooling on the problem (4.8)–(4.11) is examinedin Figure 4.3 by presenting profiles of u versus r keeping all parameters apart from µ
fixed. In the left graph of Figure 4.3, profiles for µ = 0 and the small value µ = 0.01 arequantitatively similar for much of the melting process. However, for later times, the effectof kinetic undercooling appears to be very important, with the solution for µ� 1 divertingaway from the solution for µ = 0. Indeed, it appears as if like the addition of even a smallamount of kinetic undercooling into the model prevents the solution from blowing up. In
83

the right graph of Figure 4.3, we see that for a larger value of the kinetic undercoolingparameter, µ = 0.1, the solution profiles for µ = 0 and µ = 0.1 are quantitatively differentfor most of the time.
t
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
r
u
t
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
r
u
Figure 4.3: Numerical solutions of (4.8)–(4.11) for λ = 1 and σ = 0.15. The left graphcompares the temperature profiles for µ = 0 (red solid) with the profiles for µ = 0.01(blue dashes). The right graph compares the profiles for µ = 0 (red solid) with profilesfor µ = 0.1 (blue dashes).
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40
0.2
0.4
0.6
0.8
1
t
s(t)
Figure 4.4: Numerical position of the moving boundary for λ = 1, σ = 0.15 and differentvalue of µ. Here, µ = 0 (red solid), 0.01 (loosely blue dashes), 0.1 (loosely green dots),0.15 (magenta dashes) and 0.2 (black dots), with the corresponding extinction times,respectively. The µ = 0 (red solid) case develops an unbounded speed and the solutioncannot be continued after time tc.
The position of the moving boundary as time increases for λ = 1 and σ = 0.15 and varyingvalues of µ is given in Figure 4.4. As expected, the solution for µ = 0 ceases to existat the critical time t = tc, as mentioned above in Section 4.1. However, the addition ofkinetic undercooling allows the solution to continue past tc and the interface to evolve tothe centre of the particle. For each value of µ > 0, the solution exhibits complete meltingwithout blow-up. This regularisation even works for small values of µ. Further, raisingthe kinetic undercooling coefficient increases the time for complete melting to occur. In
84

addition, Figure 4.4 suggests the speed of the interface becomes unbounded in the limits → 0. In other words as s → 0 and ignoring the kinetic undercooling in Equation(4.10), the Gibbs–Thomson condition decreases the melting temperature without bound,resulting in the large temperature gradient and an increased melting speed ds/dt→ −∞(as observed in Wu et al. (2009) and McCue et al. (2009)). However the addition of thefirst term of Equation (4.10) (kinetic undercooling) regularises this behaviour by raisingthe melting temperature as the interface speed begins to grow, allowing the meltingprocess to continue.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40
5
10
15
Time t
ln∣∣∣dsdt ∣∣∣
0 0.0005 0.001 0.0015 0.002 0.0025 0.003 0.0035 0.004 0.0045 0.0051
2
3
4
5
6
7
Time t
ln∣∣∣dsdt ∣∣∣
Figure 4.5: Numerical speed of the moving boundary for λ = 1, σ = 0.15 and for µ =0(red solid), 0.01(loosely blue dashes), 0.1(loosely green dots) 0.15(magenta dashes) and0.2(black dots).
The top graph of Figure 4.5 shows the speed of the moving boundary for the kineticundercooling values as in Figure 4.4. The red solid curve µ = 0 strongly suggests themoving boundary speed becomes unbounded at the calculated critical time, tc. It is
85

apparent that the curves for µ 6= 0 still exhibit this phenomena, however the blow-upnow occurs at the extinction time. This numerical evidence supports the conclusion thatthe speed blows up for µ > 0 in the limit s → 0. The addition of kinetic undercoolinghas regularised the singular behaviour at the critical time tc introduced by the Gibbs–Thomson effect, but the speed of the moving boundary still becomes unbounded, withthe singular behaviour now shifted to the centre of the sphere s = 0 and occurring at theextinction time tf .
The bottom graph of Figure 4.5 gives the speed of the moving boundary for early times.For µ = 0 (red solid curve), the initial speed of the moving boundary is unbounded in thelimit t→ 0+. Wu et al. (2009) give the small time behaviour of the moving boundary tobe
s(t) ∼ 1−√
2γt as t→ 0+,
where γ is the real root of a transcendental equation and this small time approximationis almost the same as the Neumann solution of the classical Stefan problem documentedin Crank (1987). The small time behaviour of the speed is
dsdt ∼ −
√2γ
2√t
as t→ 0+,
and this initial singular behaviour is clear. However, from the small time analysis inSection 3.3, the early time behaviour of the problem (4.8)–(4.11) with σ = 0 is
s(t) ∼ 1− t
µas t→ 0+,
such that the initial speed is now constant, rather than unbounded. The µ 6= 0 curvesin the bottom graph of Figure 4.5 confirm that the addition of kinetic undercoolingregularises the singular behaviour of the one-phase Stefan problem in the limit t → 0+,as in Chapter 3.
We now present results for (4.8)–(4.11) by fixing the kinetic undercooling parameter andvarying the surface tension. In the left graph of Figure 4.6, profiles for σ = 0 and a smallvalue of σ are quantitatively very similar for all times except near t = tc. However, fortimes just before tf , the surface tension has significant effects on the solutions. Recallfrom Chapter 3 that the solution with σ = 0 is well behaved in the limit t → tf (s → 0)with the flux ∂u/∂r = 0 at extinction. However, for the same parameters except σ = 0.01instead of σ = 0, there is a significant difference. A close inspection of the left graph ofFigure 4.6 suggests that with just a small amount of surface tension, there is a extremelynarrow boundary layer in which the temperature drops suddenly from a positive value to−1. In the right graph of Figure 4.6, ∂u/∂r(s, tf) at extinction increases as σ increases.
The position of the moving boundary for µ = 0.1 and varying values of σ is given inFigure 4.7. As expected, all solutions for different σ reach the centre of the particle, as allsolutions in this figure are for µ > 0. Also, raising the surface tension coefficient increases
86

t
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
r
u
t
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
r
u
Figure 4.6: Numerical solutions of (4.8)–(4.11) for λ = 1 and µ = 0.1. The left graphcompares the profiles of u versus r for σ = 0 (red solid) with the profiles for σ = 0.01(blue dashes). The right graph compares profiles σ = 0 (red solid) with the profiles forσ = 0.15 (blue dashes).
the time for complete melting to occur and makes the magnitude of the speed of theinterface to become smaller in the limit s→ 0.
0 0.1 0.2 0.3 0.4 0.5 0.60
0.2
0.4
0.6
0.8
1
t
s(t)
Figure 4.7: Numerical position of the moving boundary for λ = 1, µ = 0.1 and differentvalue of σ. Here, σ = 0 (loosely blue dashes), 0.01 (red solid), 0.05 (loosely green dots),0.15 (magenta dashes) and 0.5 (black dots).
4.4 Near-extinction behaviour the solid-melt interface
Our numerical results imply the flux ∂u/∂r(s, t) remains finite but the interface speedds/dt blows up as t→ t−f (which is the same limit as s→ 0+). Thus from (4.11) we haveu(0, tf) = −λ, a prediction that is confirmed by our numerical solutions. Putting theseresults in (4.10), we find that
s ∼√
2σµ
(tf − t)1/2 − 2(λ+ σ)3µ (tf − t) +O((tf − t)3/2) as t→ t−f . (4.12)
87

The result (4.12) is compared to the numerically calculated interface position in Figure4.8. As expected, the asymptotic behaviour agrees very well with the numerical solutionfor times near the extinction time tf .
0.181 0.182 0.183 0.184 0.185 0.1860
0.05
0.1
0.15
0.2
Time t
s(t)
Figure 4.8: A comparison of the numerical position of the moving boundary (red solid)for λ = 1, σ = 0.15 and µ = 0.01 with the asymptotic result (4.12) (blue dashes).
4.5 Conclusion
The problem (4.8)–(4.11) is solved numerically, concentrating on the extinction behaviourt → t−f . We compare this problem with the one-phase problem of melting a sphericalparticle treated by Wu et al. (2009) (µ = 0) which includes the effects of surface tension(but not kinetic undercooling).
The numerical results suggest that the addition of kinetic undercooling regularises thesingular behaviour that s(t) exhibits in the limit t → 0+. This conclusion is equivalentto that presented in the previous Chapter.
The more interesting result is that the inclusion of kinetic undercooling regularises thesingular behaviour that occurs in the zero-kinetic undercooling problem as t→ t−c . Thatis, for µ > 0, the solution no longer blows up at t = tc, but continues to exist until s = 0at t = tf . However, we find that even with µ > 0, the speed of the interface still becomesunbounded; the difference is that for µ > 0, we have ds/dt → −∞ as t → t−f instead oft→ t−c . The conclusion is that both surface tension and kinetic undercooling are requiredto describe complete melting.
We close this Chapter by noting the preliminary asymptotic result (4.12) does not includebehaviour for u in the limit t→ t−f . It would be interesting to determine such behaviourusing formal asymptotics. Further, (4.12) holds for µ > 0 and σ > 0, but breaks downin either of the limits µ → 0 or σ → 0. These delicate limits also present interestingproblems for future research.
88

Chapter 5
Drug diffusion from a spherical polymer: a model with a movingboundary
In the past decade, considerable attention has been focused on the development of poly-meric controlled drug delivery systems. The role of solvent diffusion in these polymersystems is critically important for a variety of drug delivery processes. There exist manymathematical models in the literature that describe drug diffusion processes, howevermany of these simple models involve linear diffusion on a fixed domain to allow for exactsolutions. In this chapter, we are interested in studying drug release from polymers incontact with a solvent, which leads to a more sophisticated model, since the drug mobilityis much higher in the rubbery region of polymer. The width of the rubbery region changesas the glassy-rubbery interface propagates into the polymer and the rubbery polymer mayswell or even dissolve into the surrounding solvent. Polymeric controlled drug deliverysystems possessing these characteristics are called swelling controlled release systems. Theswelling and dissolution of the polymer are studied in Chapters 6 and 7 respectively.
The non-dimensional equations governing the one-phase Stefan problem with kinetic un-dercooling studied in Chapter 3 also govern a model describing the solvent permeation inthe swelling controlled release system, ignoring the volume change of the polymer. Thisproblem is the spherical version of the model proposed by Cohen and Erneux (1988a),to describe the solvent permeating into the polymer, causing the glassy state to trans-form into the rubbery state, separated by a morphological moving front. This model isalso similar to the one investigated by Lin and Peng (2005) except we use a non-lineardiffusion coefficient, further coupling the solvent penetration and drug diffusion withinthe polymer, and we disregard the volume expansion of the swelling polymer. Hence thischapter considers the solvent permeation and the transport of the drug in the swellingcontrolled release system without volume change and is deemed as the preliminary studyfor the next chapter.
The formulation of the swelling controlled release system without volume change is de-scribed in Section 5.1. The swelling controlled release system without volume change isactually a non-swelling phase change model and is now abbreviated as NSPCM for thelater use in this thesis. The numerical scheme used to solve the NSPCM involves a front-fixing transformation together with finite difference spatial discretisation, and is brieflystated in Section 5.2. In Section 5.3, we provide an asymptotic analysis of the NSPCM forsmall time behaviour, and for large Stefan number limit. In the small time analysis, we
89

observe Case II diffusion in the NSPCM, that is, the speed of the glassy-rubbery interfaceand the flux of solvent at the surface are constant as t→ 0+. Such a delivery device alsopossesses the unique characteristic of constant rate of drug release at the beginning of thedrug delivery process. The reason for investigating large Stefan number limit comes fromthe numerical study of the model. The period of drug release for the swelling controlledrelease system can be extended for large Stefan number which is a desirable outcome ofsome therapeutic treatments. We perform a numerical analysis of the NSPCM for differ-ent parameter values and compare with the simple linear diffusion model in Section 5.4.The simple linear diffusion model is found to give a good approximation to the NSPCMfor some parameter regimes. In Section 5.5, we investigate the effect of using an alternateboundary condition in the NSPCM, and determine that the Dirichlet boundary conditionat the glassy-rubbery interface is not a good choice for the conservation of drug mass.Lastly we investigate a simple two-layered drug delivery device based on the NSPCM inSection 5.6. We show that using a multi-layered drug delivery device with specified initialdrug loading in each device can provide a desired release pattern and release rate to suita particular application.
5.1 Mathematical model
A sphere of glassy polymer containing dissolved drug is immersed in a body of thermo-dynamically compatible solvent, such that the solvent diffuses into the polymer. As thesolvent penetrates the polymer, the entanglement of macromolecular polymer chains isweakened significantly and the affected region of polymer is transformed to a rubbery orgel-like phase. The drug is only released from the rubbery phase of the polymer. Thereis a narrow region which divides the glassy and rubbery phases. Here, we assume thisto be a sharp front which penetrates into the polymer. Hence, this moving interface,R = S1(T ), divides the inner glassy region 0 < R < S1(T ) from the outer rubbery regionS1(T ) < R < S1(0), where S1(0) is the radius of the ball (note that at T = 0 there is norubbery region). The concentration of solvent and drug in the rubbery region of the poly-mer are denoted by V (R, T ) and U(R, T ) respectively, where R is the radial coordinateand T represents time. The model is
∂U
∂T= D
R2∂
∂R
(R2∂U
∂R
)in S1(T ) < R < S1(0), (5.1)
U = Ue > U∗ at R = S1(0), (5.2)
D∂U
∂R= − (U +K) dS1
dT at R = S1(T ), (5.3)
dS1dT = −k1 (U − U∗)n at R = S1(T ), (5.4)
and∂V
∂T= 1R2
∂
∂R
(DV (U)R2∂V
∂R
)in S1(T ) < R < S1(0), (5.5)
V = 0 at R = S1(0), (5.6)
DV (U)∂V∂R
= − (V − Vi)dS1dT at R = S1(T ), (5.7)
90

where DV (U) is defined as
DV (U) = Dve−β∗d
(1−U
Ue
). (5.8)
Initially the concentration of the drug is the constant, V (R, 0) = Vi and the concentra-tion of the solvent within the polymer is the zero. There are nine constant parameters inEquations (5.5)–(5.4): Dv, β∗d , Vi, D, Ue, U∗, K, k1 and n. The three phenomenologicalquantities are K, k1, and n. The amount of solvent at the polymer-solvent interface isassumed to be the equilibrium value of solvent in the swollen polymer, Ue. The ther-modynamic threshold value, U∗, is the amount of solvent concentration that invokes thetransformation of the polymer from the glassy state to the rubbery state. The diffusiv-ity of solvent, D, is assumed to be constant, however the non-linear diffusion coefficientof drug concentration is characterised by the two parameters Dv and β∗d which are theequilibrium value of drug diffusion coefficient and a dimensionless constant characterisingthe concentration dependence respectively. This non-linear diffusion coefficient (5.8) isexpressed as an exponential function which depends on the solvent concentration basedon the modified free volume theory by Fujita (1961b). This has been employed by Frisch(1978), Siepmann et al. (1999), Siepmann and Peppas (2000) and Wu et al. (2005). Therationale of utilising this non-linear diffusion coefficient of drug concentration is thatcontact of the solvent and swelling polymer leads to an increase in the mobility of themacromolecules and the polymer chains in the polymer. Consequently the diffusion ofdrug concentration is dependent on the solvent concentration via the diffusion coefficient.
This model is the spherical version of that proposed by Cohen and Erneux (1988b) withthe proper modifications that neglect the volume expansion due to the swelling polymerand a non-linear diffusion coefficient of drug concentration. Cohen and Erneux (1988b)utilised the idea of a matrix system in the diffusion controlled release system to formulatethe transport of drug in the swelling controlled release system. Hence the transportof drug is modelled by Equations (5.5)–(5.7) with this non-linear diffusion coefficient(5.8). Equation (5.6) states that the drug concentration vanishes on the outer boundaryof the polymer ball, while Equation (5.7) is a conservation of mass statement of drugconcentration in the system. Cohen and Erneux also used the idea of the moving boundaryproblem (5.1)–(5.4) to model the solvent permeation in the swelling controlled releasesystem. Equation (5.1) describes the diffusion of solvent within the rubbery region of thepolymer with a constant diffusivity D. The model forces the concentration of solvent tobe the constant Ue on the surface of the polymeric ball.
The condition of the solvent concentration at the moving glassy-rubbery interface, Cohenand Erneux employed
D∂U
∂R+ U
dS1dT ,
to be the flux from the swelling region across the glassy-rubbery interface and assumedthis to be proportional to the flux generated by the interface. This mass balance equation
91

at the glassy-rubbery interface R = S1(T ) is
D∂U
∂R+ U
dS1dT = k2 (U − U∗)n = −K dS1
dT ,
which is condition (5.3) where K is the ratio of k2/k1. The final boundary conditionat the moving glassy-rubbery interface, (5.4), describes the swelling kinetics which theinterface will move with a speed given by a power law of the solvent concentration abovea threshold value U∗ with index n > 0.
The model (5.5)–(5.4) is non-dimensionalised with the dimensionless variables
u = U − U∗
Ue − U∗, v = V
Vi, t = TD
S21(0)
, r = R
S1(0) and s1(t) = S1(T )S1(0) .
This results in the four dimensionless parameters δ, β, µ, and λ, defined as
δ = Dv
D, β = β∗d
(1− U∗
Ue
), µ = D
k1S1(0)1
[Ue − U∗]nand λ = U∗ +K
Ue − U∗> 0.
The non-dimensionalised model is
∂u
∂t= 1r2
∂
∂r
(r2∂u
∂r
)in s1(t) < r < 1, (5.9)
u = 1 at r = 1, (5.10)∂u
∂r= −(u+ λ)ds1
dt at r = s1(t), (5.11)
un = −µds1dt at r = s1(t), (5.12)
and∂v
∂t= 1r2
∂
∂r
(δv(u)r2∂v
∂r
)in s1(t) < r < 1, (5.13)
v = 0 at r = 1, (5.14)
δv(u)∂v∂r
= (1− v) ds1dt at r = s1(t), (5.15)
where δv(u) is defined as
δv(u) = δe−β(1−u).
Now the initial concentration of the drug is v(r, 0) = 1 and the initial concentration ofthe solvent is still zero. The parameter δ is the ratio of the diffusion coefficient of thedrug on the surface of the ball to the diffusion coefficient of the solvent in the rubberyregion. As the moving interface reaches the centre of spherical polymeric matrix, theboundary conditions (5.15), (5.11) and (5.12) are replaced by zero flux conditions due tothe symmetry of spherical matrix. At this time the whole polymeric ball is in the rubberystate. Drug is released as the solvent continues to penetrate into the polymer, howeverthe model is no longer a moving boundary problem, but rather has the fixed domain0 < r < 1.
92

The non-dimensionalised version of the fixed domain model is
∂u
∂t= 1r2
∂
∂r
(r2∂u
∂r
)in 0 < r < 1, (5.16)
u = 1 at r = 1, (5.17)∂u
∂r= 0 at r = 0, (5.18)
and∂v
∂t= 1r2
∂
∂r
(δv(u)r2∂v
∂r
)in 0 < r < 1, (5.19)
v = 0 at r = 1, (5.20)∂v
∂r= 0 at r = 0, (5.21)
where (5.21) and (5.18) are the new no flux conditions at the centre.
5.2 Numerical scheme
The problem (5.9)–(5.15) is a moving boundary problem which is naturally more difficultto solve numerically than normal linear diffusion problems. This is because the position ofone of the boundaries is not fixed and must be determined as part of the solution process.The numerical scheme used to solve this moving boundary problem is the same as thatdetailed in Section 3.2. Applying a front fixing transformation, the problem (5.9)–(5.15)becomes
(1− s1)2∂u
∂t= ∂2u
∂w2 + 2(1− s1)[s1 + (1− s1)w]
∂u
∂w+
(1− s1)(1− w)ds1dt
∂u
∂win 0 < w < 1, (5.22)
u = 1 at w = 1, (5.23)∂u
∂w= −(u+ λ)(1− s1)ds1
dt at w = 0, (5.24)
un = −µds1dt at w = 0, (5.25)
and
(1− s1)2∂v
∂t= δe−β(1−u)
{∂2v
∂w2 + 2(1− s1)[s1 + (1− s1)w]
∂v
∂w
}
+ δe−β(1−u)β∂u
∂w
∂v
∂w+ (1− s1)(1− w)ds1
dt∂v
∂win 0 < w < 1, (5.26)
v = 0 at w = 1, (5.27)∂v
∂w= 1δeβ(1−u)(1− v)(1− s1)ds1
dt at w = 0, (5.28)
where w is the independent variable for the new fixed boundary problem, defined to be
w = r − s11− s1
.
93

The resultant fixed boundary problem (5.22)–(5.28) is solved numerically by employingthe method of lines with an appropriate spatial discretisation to obtain a system of or-dinary differential equations (ODEs). In Section 3.2, we showed that both the finitedifference method and finite volume method produce acceptable solutions. In this sec-tion, we use the finite difference method as it is simpler to implement. The MATLABsolver ode15i is utilised to solve this system of ODEs.
The finite difference method first requires dividing the domain into n equal intervals,whose endpoints are the nodes wi = (i− 1)∆w, for i = 2, · · · , n+ 1, where w1 = 0. Theforward- and centred-difference formula are used to approximate the spatial derivativeswith algebraic expressions. These algebraic expressions are then substituted back intothe partial differential to form an ODE in time at each node.
The resulting ODE for drug obtained at the boundary w = 0 is
{[s1 + (1− s1)w1] (1− s1)2
} dvdt
∣∣∣∣w=w1
− δe−β(1−u1) [s1 + (1− s1)w1] 2(v2 − v1)(∆w)2 +
[s1 + (1− s1)w1] 2∆w (1− v1)(1− s1)ds1
dt −
δe−β(1−u1) 2∆w (1− s1)(v2 − v1)−
δe−β(1−u1)β [s1 + (1− s1)w1] u2 − u1∆w
v2 − v1∆w −
[s1 + (1− s1)w1] (1− s1)(1− w1)ds1dt
v2 − v1∆w = 0,
where ∆w is the distance between two nodes. At each interior node, we have
{[s1 + (1− s1)wi] (1− s1)2
} dvdt
∣∣∣∣w=wi
− δe−β(1−ui) [s1 + (1− s1)wi](vi+1 − 2vi + vi−1)
(∆w)2 −
δe−β(1−ui) 1∆w (1− s1)(vi+1 − vi−1)−
δe−β(1−ui)β [s1 + (1− s1)wi]ui+1 − ui−1
2∆wvi+1 − vi−1
2∆w −
[s1 + (1− s1)wi] (1− s1)(1− wi)ds1dt
vi+1 − vi−12∆w = 0,
for i = 2, · · · , n. The equation obtained by discretising Equation (5.27) is
vn+1 = 0.
Similarly, the ODE for solvent obtained at the boundary w = 0 is
{[s1 + (1− s1)w1] (1− s1)2
} dudt
∣∣∣∣w=w1
− [s1 + (1− s1)w1] 2(u2 − u1)(∆w)2 −
[s1 + (1− s1)w1] 2∆w (u1 + λ)(1− s1)ds1
dt −2
∆w (1− s1)(u2 − u1)−
[s1 + (1− s1)w1] (1− s1)(1− w1)ds1dt
u2 − u1∆w = 0,
94

and for each interior node i = 2, · · · , n we have
{[s1 + (1− s1)wi] (1− s1)2
} dudt
∣∣∣∣w=wi
− [s1 + (1− s1)wi]ui+1 − 2ui + ui−1
(∆w)2 −
1∆w (1− s1)(ui+1 − ui−1)−
[s1 + (1− s1)wi] (1− s1)(1− wi)ds1dt
ui+1 − ui−12∆w = 0,
and Equation (5.23) becomes
un+1 = 1.
This set of ODEs obtained by discretising the problem (5.22)–(5.28), together with (5.25)is rearranged into a column vector of the form
F(t,y,y′) = 0
in order to solve the system using ode15i. For example, the vector y of resultant ODEsfor the case of 4 grid nodes (n = 3) is
y =(v1 v2 v3 v4 u1 u2 u3 u4 s1
)T.
The sparsity pattern of Jy, the Jacobian of ∂F/∂y and the sparsity pattern of Jy′ , theJacobian of ∂F/∂y′ generated from the above ODEs for the case of 4 grid nodes are
Jy =
∗ ∗ ∗∗ ∗ ∗ ∗∗ ∗ ∗ ∗
∗∗ ∗ ∗∗ ∗ ∗ ∗∗ ∗ ∗ ∗
∗∗
, and Jy′ =
∗ ∗∗ ∗∗ ∗
∗ ∗∗ ∗∗ ∗
∗
.
These two sparsity matrices are supplied to ode15i in order to reduce the number offunction evaluations, and thus reduce the computational time.
As the moving glassy-rubbery interface reaches the centre of the polymeric ball, the modelchanges from the problem (5.9)–(5.15) to the problem (5.16)–(5.21), which is fixed bound-ary problem. Therefore the problem (5.16)–(5.21) is solved numerically without the needof applying the “front fixing” method. The numerical method used to solve the problem(5.16)–(5.21) is again the method of lines with finite difference spatial discretisation. ThePDEs are discretised in space by using the finite difference method to form a system ofODEs. Unlike other terms in Equations (5.19) and (5.16), the term ∂v/∂r divided by r
95

and ∂u/∂r divided by r cannot be directly discretised by the difference-quotient formulaeat r = 0 because of the singularity at r = 0.
The second partial derivative of v with respect to r at r = 0 can be expressed as
∂2v
∂r2
∣∣∣∣r=0
= lim∆r→0
∂v
∂r
∣∣∣∣r=∆r
− ∂v
∂r
∣∣∣∣r=0
∆r − 0 = lim∆r→0
1∆r
∂v
∂r
∣∣∣∣r=∆r
= 1r
∂v
∂r
∣∣∣∣r=0
. ($)
Hence the governing partial differential Equation (5.19) at r = 0 is re-expressed as
∂v
∂t
∣∣∣∣r=0
= δe−β(1−u)(∂2v
∂r2 + 2r
∂v
∂r+ β
∂u
∂r
∂v
∂r
) ∣∣∣∣r=0
= 3δe−β(1−u)∂2v
∂r2
∣∣∣∣r=0
,
and with ($), (5.16) at r = 0 becomes
∂u
∂t
∣∣∣∣r=0
=∂2u
∂r2
∣∣∣∣r=0
+ 2r
∂u
∂r
∣∣∣∣r=0
= 3∂2u
∂r2
∣∣∣∣r=0
.
The resultant ODEs for drug concentration are: at the boundary r = 0
dvdt
∣∣∣∣r=r1− 6δe−β(1−u1) v2 − v1
(∆r)2 = 0,
at each interior node
dvdt
∣∣∣∣r=ri−δe−β(1−ui) (vi+1 − 2vi + vi−1)
(∆r)2 − δe−β(1−ui) 2ri
vi+1 − vi−12∆r −
δe−β(1−ui)βui+1 − ui−1
2∆rvi+1 − vi−1
2∆r = 0,
and (5.20)
vn+1 = 0.
The ODEs for solvent concentration are: at the boundary r = 0
dudt
∣∣∣∣r=r1− 6(u2 − u1)
(∆r)2 = 0,
at each interior node
dudt
∣∣∣∣r=ri−(ui+1 − 2ui + ui−1)
(∆r)2 − 2ri
ui+1 − ui−12∆r = 0,
for i between 2 and n and (5.17)
un+1 = 1.
As before, the resultant set of ODEs obtained by discretising the problem (5.16)–(5.21) isre-arranged to a column vector F(t,y,y′) = 0 to be solved by MATLAB’s built-in ODE
96

solver ode15i. For example, the sparsity pattern of Jy, the Jacobian of ∂F/∂y and thesparsity pattern of Jy′ , the Jacobian of ∂F/∂y′ generated from the above ODEs for thecase of 4 grid nodes are
Jy =
∗ ∗ ∗∗ ∗ ∗ ∗ ∗ ∗∗ ∗ ∗ ∗ ∗ ∗
∗∗ ∗∗ ∗ ∗∗ ∗ ∗
∗
, and Jy′ =
∗∗∗
∗∗∗
.
The numerical solutions of the problem (5.9)–(5.15) will provide profiles for the drugconcentration in the polymer, profiles for the solvent concentration in the polymer and thetime history of the glassy-rubbery interface. From the viewpoint of the pharmaceuticalindustry, knowing the amount of drug concentration that diffuses out of the sphericalpolymer at certain times is critical to the safety of patients. Either overdosing or under-dosing could impair the health of the patient. Therefore the normalised amount of drugreleased from the polymer mtc , up to certain time tc, is more useful than profiles ofdrug concentration, and indicates the amount of drug concentration that diffuses out ofthe spherical polymer at certain time more directly. The quantity mtc is calculated byintegrating the outward flux of drug concentration at the surface of spherical polymerover the designated time.
The outward flux of drug concentration at the surface of spherical polymer in the NSPCMis calculated numerically by using the backward difference formula
−δe−β(1−u)∂v
∂r
∣∣∣∣r=1
=− δe−β(1−u)
1− s1
∂v
∂w
∣∣∣∣w=1
≈− δe−β(1−un+1)
1− s1
3vn+1 − 4vn + vn−12∆w ,
for second order accuracy. After the onset of solvent penetration into the polymer, thenormalised amount of drug concentration v released from the polymer up to certain timetc is
mtc =MTc
M∞= −4πS2
1(0)∫ Tc
0Dd(U)∂V
∂R
∣∣∣∣R=S1(0)
dT/(∫ 2π
0
∫ π
0
∫ S1(0)
0ViR
2 sinφ dRdφdθ)
=− 4πS31(0)δVi
∫ tc
0e−β(1−u)∂v
∂r
∣∣∣∣r=1
dt/(4π
3 S31(0)Vi
)=− 3δ
∫ tc
0e−β(1−u)∂v
∂r
∣∣∣∣r=1
dt, (5.29)
and will approach one as tc →∞.
97

The normalised amount of drug concentration v remaining in the polymer at certain timetc approaches zero as tc →∞, and is given by
1−mtc = 1M∞
∫ 2π
0
∫ π
0
∫ S1(0)
0V (R, Tc)R2 sinφ dRdφdθ
=3∫ 1
0v(r, tc)r2dr = 3
∫ s1(tc)
0r2dr + 3
∫ 1
s1(t)v(r, tc)r2dr
=s31(tc) + 3
∫ 1
s1(t)v(r, tc)r2dr, (5.30)
where Tc is non-dimensionalised as tc. The integrals in Equations (5.29) and (5.30) arecomputed by the built-in MATLAB function trapz, which uses trapezoidal integration.
The numerical method’s conservative capability and accuracy are tested by using mt and1−mt.
0 2 4 6 8 10 12 14 16 180
0.2
0.4
0.6
0.8
1
t
mt
Figure 5.1: The normalised amount of drug concentration released from the polymerversus time, for µ = 1, λ = 100, δ = 0.1 and β = 0. As expected, mt = 0 at t = 0, and astime increases, the normalised drug release approaches 1.
Figure 5.1 is the plot of the normalised drug release from the polymer over time, obtainednumerically from (5.29). Figure 5.2 shows the normalised drug concentration remainedin the polymer versus time, obtained numerically from (5.30). The blue solid curve inFigure 5.1 increases from zero to one after the onset of solvent penetration at t = 0.Similarly, the blue solid curve in Figure 5.2 decreases from one to almost zero after theonset of solvent penetration. As the blue solid curve in Figure 5.1 does not exceed oneand the blue solid curve in Figure 5.2 does not drop below zero, the problem (5.9)–(5.15)for the NSPCM does not gain or lose any extra drug concentration due to the numericalmethod. Therefore, conservation of mass is achieved for the drug concentration in themodel (5.9)–(5.15).
The curve in Figure 5.3 is the numerical error generated by subtracting one from thesummation of mt and 1 − mt in the polymer. The curve increases from zero after the
98

0 2 4 6 8 10 12 14 16 180
0.2
0.4
0.6
0.8
1
t
1−mt
Figure 5.2: The normalised amount of drug concentration remained in the polymer versustime for µ = 1, λ = 100, δ = 0.1 and β = 0, starting from 1 − mt = 1 at t = 0, andreducing to zero.
onset of solvent penetration and is steady with the numerical error below 3× 10−3. Thenumerical error is not increasing over time and this behaviour is what “mass conserva-tive” is understood to mean. Therefore the method of lines with finite difference spatialdiscretisation can be considered as a reliable numerical method which conserves the totaldrug concentration.
0 2 4 6 8 10 12 14 16 18
0
1
2
3
·10−3
t
Numerical error
Figure 5.3: The numerical error of the problem (5.1)–(5.7) for µ = 1, λ = 100, δ = 0.1and β = 0.
The problem (5.1)–(5.7) for the NSPCM is similar to the model studied by Lin and Peng(2005). The difference is that we use a fixed boundary on the outer wall, rather thana second moving boundary, illustrating the volume expansion due to the swelling of thepolymer and the diffusion coefficient of drug concentration. Despite the difference between
99

these two models, our results obtained from the problem (5.1)–(5.7) should have a certaindegree of similarity to that of Lin and Peng (2005). The time history of the glassy-rubberyinterface s1 for the NSPCM behaves similarly to the corresponding figures generated byLin and Peng (2005). However, the outward flux of drug concentration v at the surfaceof spherical polymer obtained from the problem (5.9)–(5.15) behaves differently to theresults generated by Lin and Peng (2005).
10−3 10−2 10−1 100 101 10210−3
10−2
10−1
100
101
Time τ
−∂v∂ρ
∣∣∣∣ρ=ρf
Figure 5.4: The outward flux of drug concentration v at the surface of a spherical polymerversus time τ for different values of µ and λ with δ = 1. From top to bottom, both colouredsolid curves are for λ = 0.1, 1, 10 and 100 and µ = 0.02, 0.2, 2 and 20. The blue solidcurves are results obtained numerically by Lin and Peng (2005) and the red dashed curvesare results obtained numerically from the problem (5.9)–(5.15). Our results agree verywell with those of Lin and Peng (2005) at early times, however as time increases, oursolution behaviour is quite different, due to the fixed outer boundary.
Figure 5.4 shows the comparison between the numerical results obtained by Lin and Peng(2005) and the numerical results of problem (5.9)–(5.15) for the outward flux of drugconcentration at ρ = ρf versus time. The blue curves are produced by scanning theFigure 13 in Lin and Peng (2005) and digitising the image in order to plot the outwardflux of drug, ∂v/∂ρ, in MATLAB. The time appearing in the horizontal label is writtenas τ due to the different scaling used by Lin and Peng (2005). In Figure 5.4 the bluecurves all have turning points before the time at which the glassy-rubbery interface s1
reaches the centre of the spherical polymer, and subsequently turn upward. In contrast,the red dashed curves all decrease monotonically. From Figure 5.2 the normalised drugconcentration v remaining in the polymer is very close to zero when the glassy-rubberyinterface s1 approaches the centre of spherical polymer, which is the general scenario forthe NSPCM. As the glassy-rubbery interface goes to the centre, the drug concentrationis not sufficient enough to cause the outward flux at the surface of the spherical polymerto turn upwards as in Figure 5.4. Since the NSPCM (5.1)–(5.7) is a conservative model,and the numerical method has been show to be reliable, it is deemed that the differencebetween the blue and red dashed curves is caused by the boundary condition at the
100

surface of the swelling polymer. This will be addressed later in Chapter 6 where we studya swelling controlled release system with two moving boundaries, as in Lin and Peng(2005).
5.3 Asymptotic analysis
5.3.1 Small-time behaviour
For some polymers, the diffusion of solvent in a glassy polymer is known as Case IIdiffusion, as defined by Alfrey et al. (1966), Astarita and Sarti (1978) and Masaro andZhu (1999). The two main features of Case II diffusion are the existence of a glassy-rubbery interface which separates the glassy and rubbery parts of the polymer, and thatthe speed of the glassy-rubbery interface and the rate of solvent penetration into thepolymer are both initially constant in time. The asymptotic analysis for the small timebehaviour of problem (5.9)–(5.15) is important as it will reveal the initial behaviour of themodel, and serves as an indication of whether the problem possesses the two main featuresof the Case II diffusion. The small time solutions are also important for the numericalmethod defined in Section 5.2 as they serve as the initial conditions. The method ofobtaining the small time solutions is similar to that outlined in Section 3.3. Two newvariables vs(r, t) and us(r, t) are introduced and defined as
vs(r, t) = v(r, t)r,
with a similar relation holding for us(r, t) and u(r, t). The non-dimensional model basedon the two new variables is
∂us∂t
= ∂2us∂r2 in s1 < r < 1, (5.31)
us = 1 at r = 1, (5.32)
s1∂us∂r− us = −(us + λs1)s1
ds1dt at r = s1(t), (5.33)
uns = −µsn1ds1dt at r = s1(t), (5.34)
and
∂vs∂t
= δe−β(
1−usr
) [∂2vs∂r2 + β
r3
(r∂us∂r− us
)(r∂vs∂r− vs
)]in s1 < r < 1, (5.35)
vs = 0 at r = 1, (5.36)
δe−β(
1−uss1
) (s1∂vs∂r− vs
)= (s1 − vs) s1
ds1dt at r = s1(t). (5.37)
101

The boundary condition is not fixed - but transformed to one
(1− s1)2∂us∂t
= ∂2us∂w2 + (1− s1)(1− w)ds1
dt∂us∂w
in 0 < w < 1, (5.38)
us = 1 at w = 1, (5.39)∂us∂w− (1− s1)∂us
∂w− (1− s1)us =
−[us + λ− (us + 2λ)(1− s1) + λ(1− s1)2
](1− s1)ds1
dt at w = 0, (5.40)
uns = −µ [1− (1− s1)]n ds1dt at w = 0, (5.41)
and
(1− s1)2∂vs∂t
= δe−β(
1−us
s1 + (1− s1)w
) {∂2vs∂w2 +
β
[(s1 + (1− s1)w
)∂us∂w− (1− s1)us
] [(s1 + (1− s1)w
)∂vs∂w − (1− s1)vs
](s1 + (1− s1)w
)3
+
(1− s1)(1− w)ds1dt
∂vs∂w
in 0 < w < 1, (5.42)
vs = 0 at w = 1, (5.43)
δe−β(
1−uss1
) [s1∂vs∂w− (1− s1)vs
]= (s1 − vs) s1(1− s1)ds1
dt at w = 0. (5.44)
The variables vs, us and ds1/dt in Equations (5.38)–(5.44) are now expanded in a powerseries of 1− s1:
vs ∼ vs0(w) + vs1(w)(1− s1) + vs2(w)(1− s1)2 + · · · ,
us ∼ us0(w) + us1(w)(1− s1) + us2(w)(1− s1)2 + · · · ,ds1dt ∼ g0 + g1(1− s1) + g2(1− s1)2 + · · · , as s1 → 1−.
Substituting these to the Equations (5.38)–(5.44), and solving for us0(w), us1(w), us2(w),g0, g1 and g2 (as described in Section 3.3) give
us0 = 1, us1 = −(1 + λ+ µ)µ
(1− w), us2 = 1 + λ
µ2 [1 + 2µ+ n(1 + λ)] (1− w),
g0 = −1µ, g1 = n(1 + λ)
µ2 , and g2 = −n2µ3
[(3n− 1)λ2 + (6n+ 2µ)λ+ 1 + 3n+ 2µ
].
102

Similarly, vs0(w), vs1(w) and vs2(w) are found to be
vs0 = 0, vs1 = 1δµ
(1− w), and
vs2 = − 1(δµ)2 [1 + δn(1 + λ) + 2δµ− βδ(1 + λ)] (1− w)− β
2δµ2 (1 + λ)(1− w2),
by using the method described in Section 3.3. Therefore the small time behaviour of thedrug concentration is
v(r, t) ∼ 1δµ
(1− rr
)+ β(1 + λ)
2δµ2
((1− r)2
r
)− [1 + δn(1 + λ) + 2δµ]
δ2µ3
(1− rr
)t+ · · · ,
(5.45)
as t → 0+ and the working is showed in Appendix B. The small time behaviour of theflux of drug at the surface of the polymeric ball is
∂v
∂r
∣∣∣∣r=1∼ − 1
δµ+ 1 + δn(1 + λ) + 2δµ
δ2µ3 t+ · · · . (5.46)
The amount of drug released from the spherically polymeric drug carrier for small times,and normalised by initial amount of drug is mt which is given by
mt = −3δ∫ t
0
∂v
∂r
∣∣∣∣r=1
dt ∼ 3µt− 3 [1 + δn(1 + λ) + 2δµ] t2
2δµ3 + · · · , (5.47)
as t → 0+. The parameter β does not appear in the O(t) and O(t2) terms of Equation(5.47), and therefore the effect of adapting a non-linear diffusion coefficient for the drugconcentration is the same as for the case of using the constant diffusion coefficient, up toO(t2) in the small time behaviour of mt. The effect of the parameter β in the small timebehaviour of mt may be investigated if the third correction term vs3 is calculated.
Equations (3.36) and (5.46) are the flux of solvent and drug at the surface of the polymericball in the small time limit respectively. Both expressions are O(1) as t → 0+ and aredependent on the kinetic parameter µ. From (3.35) and (3.36) we know 1− s1 is O(t) ast → 0+ and the flux of solvent at the surface of the polymeric ball is O(1) as t → 0+,hence the model (5.9)–(5.15) exhibits the characteristic of the Case II diffusion. The CaseII diffusion observed by (5.9)–(5.15) is the result of the kinetic boundary condition (5.12).More importantly the drug release rate is a initially constant which is an important featurefor pharmaceutical science.
Figure 5.5(a) compares the numerical results with the small time asymptotic result (3.35)for the position of the glassy-rubbery interface s1 in problem (5.9)–(5.15). Figure 5.5(b)compares the numerical results with the small time asymptotic result (5.47) for the nor-malised drug release from the spherical drug carrier. In both graphs, the small timeasymptotic results agree very well with the numerical results for small time. The bluedashed curve diverges from the red solid curve earlier in Figure 5.5(b) than Figure 5.5(a),
103

as the asymptotic result for s1 in small time limit, (3.35), is O(t3) as t → 0+ but theasymptotic result of mt in small time limit, (5.47), is only O(t2) as t→ 0+ .
0 0.5 100.20.40.60.8
1
t
s1
(a) Glassy-rubbery interface, s1, versus time.
0 0.05 0.1 0.150
0.1
0.2
t
mt
(b) Normalised drug release, mt, versus time.
Figure 5.5: The comparison of the numerical results (red solid) of NSPCM for µ = 1,λ = 1, δ = 0.1 and β = 0 with small time asymptotic results (3.35) and (5.47) (bluedashes).
The small time asymptotic results (5.46) and (5.47) break down in the limit µ → 0+,and are only valid for t = O(µ2). Hence the small time analysis for the problem (5.9)–(5.15) does not hold for µ = 0. For the case of µ = 0, the process of solvent permeationis modelled by the classical Stefan problem while the transport of drug is unaltered.This modified model does not have a physical description, and its purpose is purely forinvestigating the case of µ = 0 on the drug release. The normalised drug release of thismodified model in small time limit is
mt ∼6
√δ
π
[erf(√
γ
2δ
)+√
2δπγ
e−γ2δ
]−1√t+
{ 9δγ(δ + γ)(γ + 3) −
3δγδ + γ
−[9δγ
(δ + γ)(γ + 3) + 3δ2
δ + γ
] [erf(√
γ
2δ
)+√
2δπγ
e−γ2δ
]erf(√
γ
2δ
)+
3δγ(δ + γ)(γ + 3)
√2δπγ
(δ + γ − δe
−γ2δ) [
erf(√
γ
2δ
)+√
2δπγ
e−γ2δ
]−1 t, (5.48)
where γ is given by the following relationship
λ
√πγ
2 eγ2 erf
(√γ
2
)= 1.
The effect of µ is investigated by comparing the drug released from the spherical drugcarrier calculated from both the asymptotic results of the NSPCM, and the analyticalsolution of the simple linear diffusion model. In Figure 5.6 the green dashed curve clearlybehaves differently to the the black solid curve, while the red dotted curve is virtuallyindistinguishable from the black solid curve. The reason for this is because the leadingorder term of mt, calculated from the simple linear diffusion model, is
√t, which is also
the asymptotic solution for µ = 0 in the small time limit. Hence if Equation (5.12) isreplaced by the condition u = 0 at r = s1(t), the early drug release scales the same wayas the simple linear diffusion model, as in Higuchi (1961).
104

0 0.02 0.04 0.06 0.08 0.10
0.1
0.2
0.3
t
mt
Figure 5.6: The comparison of small time asymptotic results (5.48) (µ = 0, black), (5.47)(µ = 1, green dashes) and the analytic solution (2.15) (red dots) of the simple lineardiffusion model for δ = 0.1, λ = 1, and β = 0.
5.3.2 Large “Stefan number” limit
The small time analysis only provides approximate solutions that are valid at the be-ginning of the problem. From the numerical experimentation, the period of drug releasefor the swelling controlled release system is extended for large value of λ. Hence theasymptotic behaviour of problem (5.9)–(5.15) for large λ is investigated and the resultantapproximate solutions are expected to be valid for longer time. The parameter λ is theso-called Stefan number. In order to investigate the asymptotic solutions for large λ, wefirstly introduce the three new dimensionless parameters
ρ = λ
µr, τ = λ
µ2 t, and σ1(τ) = λ
µs1(t).
This is actually the first time scale described in Section 3.4. The problem (5.9)–(5.15) istransformed into
∂2u
∂ρ2 + 2ρ
∂u
∂ρ= 1λ
∂u
∂σ1
1τ ′(σ1) in σ1(τ) < ρ < ρf , (5.49)
u = 1 at ρ = ρf , (5.50)∂u
∂ρ= −
(1 + u
λ
) 1τ ′(σ1) at ρ = σ1(τ), (5.51)
un = − 1τ ′(σ1) at ρ = σ1(τ), (5.52)
σ1 = ρf at τ = 0, (5.53)
and
δe−β(1−u)(∂2v
∂ρ2 + 2ρ
∂v
∂ρ+ β
∂u
∂ρ
∂v
∂ρ
)= 1λ
∂v
∂σ1
1τ ′(σ1) in σ1(τ) < ρ < ρf , (5.54)
v = 0 at ρ = ρf , (5.55)
δe−β(1−u)∂v
∂ρ= 1λ
(1− v) 1τ ′(σ1) at ρ = σ1(τ), (5.56)
105

where ρf is a constant defined as ρf = λ/µ. The variables v, u and τ in the Equations(5.49)–(5.56) are expanded in a power series of 1/λ as
v = v0(ρ, σ1) + v1(ρ, σ1) 1λ
+ v2(ρ, σ1) 1λ2 +O( 1
λ3 ),
u = u0(ρ, σ1) + u1(ρ, σ1) 1λ
+ u2(ρ, σ1) 1λ2 +O( 1
λ3 ),
τ = τ0(σ1) + τ1(σ1) 1λ
+ τ2(σ1) 1λ2 +O( 1
λ3 ),
and substituted back to the Equations (5.49)–(5.56) to obtain the solution of each termin the asymptotic series. The problems for u0(ρ, σ1) and τ0(σ1) are described and solvedin Section 3.4, with the resulting solutions being
u0 =1− p(σ1)(ρfρ− 1
), where
p = σ2/n1
p(1−n)ρ1/nf + σ
(2−n)/n1 (ρf − σ1)
, and
dτ0dσ1
=−(− dτ0
dσ1
)(n−1)/n− σ1 + σ2
1ρf.
The resulting solutions of v0(ρ, σ1) and v1(ρ, σ1) are
v0 =0, and
v1 = 1δβ
[exp (βp(σ1)(ρf − ρ)/ρ)− 1] ,
by using the method described in Section 3.4. The expressions for u0(ρ, σ1), u1(ρ, σ1),τ0(σ1) and τ1(σ1) (with n = 1) are also described and solved in Section 3.4, with theresulting solutions
u0 =1−(
1ρ− 1ρf
)σ2
1ρfρf + σ1(ρf − σ1) ,
u1 =−σ1ρ
2f (σ1 + 2)(ρ2 − 3ρfρ+ 2ρ2
f )6[ρf + σ1(ρf − σ1)]3 +
(1ρ− 1ρf
)×
σ21ρ
3f
[σ4
1 − 3σ31ρf + σ2
1(2ρ2f − 3ρf + 2) + 4σ1ρ
2f − 6ρf
]6[ρf + σ1(ρf − σ1)]4 ,
τ0 =ρf − σ1 +ρ2f − σ2
12 −
ρ3f − σ3
13ρf
, and
τ1 =16
[2(ρf − σ1) + (ρf − σ1)2 − 2ρf (ρf − σ1)
ρf + σ1(ρf − σ1)
].
The asymptotic solution of v for large λ with n = 1 is
v = 1δβ
e
βσ21(ρf − ρ)
ρ[ρf + σ1(ρf − σ1)] − 1
1λ
+O
( 1λ2
), (5.57)
106

and the asymptotic solution of v for large λ with n = 1 and β = 0 is
v =1δ
ρf − ρρ
σ21
ρf + ρfσ1 − σ21
1λ
+2ρ2
f − 3ρfρ+ ρ2
6δ2ρ2fσ1(2 + σ1)
(ρf + ρfσ1 − σ21)3
1λ2 +
16δ2
ρf − ρρ
σ31
(ρf + ρfσ1 − σ21)4
{δ[−2ρfσ4
1 + (6ρ2f + 2ρf )σ3
1 − 6ρ3fσ
21+
(2ρ4f − 6ρ3
f − 6ρ2f )σ1 + 6ρ3
f + 4ρ4f
]− 6σ5
1 + 20ρfσ41 − (23ρ2
f − 16ρf )σ31+
(9ρ3f − 36ρ2
f )σ21 + (21ρ3
f − 10ρ2f )σ1 + 12ρ3
f
} 1λ2 +O
( 1λ3
). (5.58)
The amount of drug released from the spherical polymeric drug carrier and normalisedwith initial amount of drug is
mt = −3δ∫ t
0
∂v
∂r
∣∣∣∣r=1
dt ∼ 3δµρf
∫ σ
ρf
[ρf + σ(ρf − σ)]∂v∂ρ
∣∣∣∣ρ=ρf
dσ ∼ µ
λρ2f
(ρ3f − σ3
1) + · · ·
(5.59)
as λ→∞ to leading order. Expressing (5.59) in the original variables, gives
mt ∼ 1− s31 for λ� 1. (5.60)
Since the location of the moving boundary interface s1 in small time limit is s1 ∼ 1− t/µas t→ 0+, (5.60) reduces to
mt ∼ 3(1− s1) ∼ 3µt as t→ 0, and λ→∞,
which agrees with (5.47), the small time behaviour of mt examined in Section 3.4.
The asymptotic results of the problem (5.9)–(5.15) for large λ are compared to the nu-merical results.
0 2 4 6 8 10 12 14 16 180
0.2
0.4
0.6
0.8
1
t
s1
Figure 5.7: The comparison of the numerical solution for the interface position (bluesolid) computed for µ = 1 and λ = 100 with the asymptotic result (3.44) (red dashes).
107

Figure 5.7 compares both the numerical result and the asymptotic result (3.44) of theglassy-rubbery interface s1 for large λ, as time increases. With the scale used in Figure 5.7the blue solid and red dashed curves are not discernibly different. The difference betweenthese two coloured curves only appears when Figure 5.7 is magnified and behaves as theobservation made in Section 3.4.
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
r
u
Figure 5.8: A comparison of the solvent concentration profiles, calculated numerically(blue solid) with for µ = 1 and λ = 100, with the asymptotic result (3.45) (red dashes).
Figure 5.8 compares the numerical results with asymptotic result (3.44) for the profilesof solvent concentration at increasing times for large λ. Again under the scale used inFigure 5.8 the blue solid and red dashed curves are not discernibly different for earlytimes, however the difference between numerical and asymptotic results starts to emergeas the glassy-rubbery interface s1 approaches the centre of the sphere, which is expectedfrom the study in Section 3.4.
0.96 0.97 0.97 0.98 0.98 0.99 0.99 10
0.02
0.04
0.06
r
v
Figure 5.9: A comparison of the numerical solutions to (5.9)–(5.15) (blue solid) computedfor µ = 1, λ = 100, δ = 0.1 and β = 0 with the asymptotic result (5.58) (red dashes) attimes t = 0.02, 0.04, 0.06, 0.08 and 0.1.
108

0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.02
0.04
0.06
0.08
r
v
Figure 5.10: A comparison of the numerical solutions to (5.9)–(5.15) (blue solid) computedfor µ = 1, λ = 100, δ = 0.1 and β = 0 with the asymptotic result (5.58) (red dashes) attimes t = 3, 6, 9, 12, 15 and 17.2.
Figures 5.9 and 5.10 compare the profiles of drug concentration calculated numerically tothe asymptotic result (5.58) for large λ at increasing times. The asymptotic results clearlydo not approximate the numerical profiles when the time t is larger than 15. Conversely,the asymptotic profile for the solvent concentration u in Figure 5.8 does indeed track thenumerical profile, which suggests the asymptotic solution (5.58) for drug concentrationrequires a higher order term, or possibly another time scale.
10−5 10−4 10−3 10−2 10−1 100 101 1020
2
4
6
8
t
−∂v∂r
∣∣∣∣r=1
Figure 5.11: A comparison of the numerical solutions to (5.9)–(5.15) (blue solid) withthe asymptotically approximated outward flux of drug v at the surface, calculated from(5.58) (red dashes), [computed for µ = 1, λ = 100, δ = 0.1 and β = 0].
In Figure 5.11 the asymptotically calculated curve diverges from the numerically com-puted curve between approximately t = 10−3 and t = 10−1. This difference is of the orderof 10−1 and decreases when the time t is either less than 10−3 or greater than 10−1. A
109

stricter error bound on the numerical method, or calculating the next order term in theasymptotic solution of drug concentration may improve this result.
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.05
0.1
0.15
r
v
Figure 5.12: A comparison of the numerical solutions to (5.9)–(5.15) (blue solid) computedfor µ = 1, λ = 100, δ = 0.1 and β = 1 with the asymptotic result (5.57) (red dashes) attimes t = 3, 6, 9, 12 and 15.
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.5
1
1.5
2
2.5
r
v
Figure 5.13: A comparison of the numerical solutions to (5.9)–(5.15) (blue solid) computedfor µ = 1, λ = 100, δ = 0.1 and β = 5 with the asymptotic result (5.57) (red dashes) attimes t = 3, 6, 9, 12 and 15.
Figures 5.12 and 5.13 compare the numerical results of problem (5.9)–(5.15) with theasymptotic result (5.57), showing the profiles of drug concentration at various times forlarge λ. In Figure 5.10, the asymptotic results start to diverge from the numerical solutionat approximately t = 15 for β = 0, however in Figure 5.12, divergence of results startsto emerge much earlier, at approximately t = 3 for β = 1. The glassy-rubbery interfaceposition is seen to no longer be approximated when time is 3. This divergence betweenthe numerical and asymptotic profiles is worse when the value of β is increased further,as seen in Figure 5.13.
110

In the case of β = 0, the asymptotic solution (5.58) will diverge from the numerical resultsafter a period of time, however the asymptotic solution (5.57) [for β > 1] diverges from thenumerical result at the beginning of drug diffusion. One reason for this could be because(5.58) has an extra correction term, but more likely, the existing asymptotic expansionfor the drug concentration in the large Stefan number limit is not a good choice when β
is large as it appears in the non-linear diffusion coefficient.
5.4 Numerical experimentation
The model describing the solvent permeation and the transport of drug in the swellingcontrolled release system, where volume change has been ignored, has three main constantparameters λ, µ and β. The parameters λ and µ are the Stefan number and kinetic under-cooling coefficient, respectively, and are both important for determining the position of theglassy-rubbery interface. The parameter β is a non-dimensional parameter which gives theeffect of the solvent concentration on the non-linear drug diffusion coefficient. The effectsof varying these three parameters on the NSPCM are now investigated. Further, themodel is compared with the simple linear diffusion model, (2.5)–(2.8), which describes thetransport of drug from a spherical drug carrier. Typical results of the swelling controlledrelease system without volume change are presented in Figure 5.14.
s1
0 0.1 0.2 0.3 0.40
0.2
0.4
0.6
0.8
1
t
(a) The time history of the glassy-rubbery in-terface. The front moves from 1 inwards, andreaches the centre at approximately t = 0.3651.
mt
0 2 4 60
0.2
0.4
0.6
0.8
1
t
(b) Normalised amount of drug released fromthe spherical drug carrier versus time. The redline indicates the time the interface reaches thecentre.
u t
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
r
(c) From right to left, profiles of solvent concen-tration are shown for t = 0.001, 0.01, 0.1, 0.27,0.3651 (black dashes), 0.4201 and 0.6801.
v t
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
r
(d) From right to left, profiles of drug concen-tration are shown for t = 0.01, 0.17, 0.3651(black dashes), 0.5511, 0.8311, 1.4251, 2.1251and 4.9651.
Figure 5.14: Numerical results of the NSPCM, computed for λ = 0.8, µ = 0.1, δ = 0.1and β = 20.
111

In Figure 5.14(a) the glassy-rubbery interface reaches the centre of spherical drug carrierat time tf = 0.3651. At this time, indicated by the red vertical line in Figure 5.14(b), lessthan 40% of the drug concentration has been released from the drug carrier. In additionthe moving boundary problem switches to the fixed boundary problem at time tf , whichis indicated by the black dashed curves in Figures 5.14(c) and 5.14(d), and the solventconcentration continues to rise.
5.4.1 The effect of varying β
The two dimensionless parameters related to the non-linear diffusion coefficient for drugconcentration are δ and β. The constant δ is the ratio of Dd to D respectively diffusioncoefficient of the drug and solvent in the rubbery region measured from the rubberypolymer that is already in the equilibrium swollen state. Hence the parameter δ is themaximum value of the dimensionless diffusion coefficient for drug concentration, and theeffect of varying this parameter is well known. The diffusion of the drug in the rubberypolymer is also dependent on the solvent concentration because the non-linear diffusioncoefficient is of an exponential form that depends on the solvent concentration and β.Hence the amount of drug released from the spherical drug carrier is also influenced bythe solvent concentration and the diffusion coefficient of drug is not constant throughoutthe rubbery region of the polymer before the equilibrium swollen state. The constant βis the exponential index of the non-linear diffusion coefficient for drug concentration v.The effect of varying β is examined for the normalised amount of drug released from thespherical drug carrier in the following. The other constants δ, µ and λ are fixed and theyare assigned values of 0.1, 0.01 and 1 respectively.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
r
v
Figure 5.15: The drug concentration profile for the NSPCM in the polymeric ball at timet = 0.2891 for λ = 1, µ = 0.01, δ = 0.1, and for β = 0 (blue solid), 5 (magenta dashes)and 20 (black dots).
We firstly investigate the effect of varying β on the profile of drug concentration in thepolymer at t = 0.2891. At this specific time, the solvent profile in the polymer is the samefor different values of β, and hence the effect of the solvent on the non-linear diffusion
112

coefficient of drug is the same for different values of β. Therefore the parameter β is nowthe only factor that affects the value of the non-linear diffusion coefficient of drug concen-tration. We see in Figure 5.15 that a higher drug concentration remains in the polymerwhen the value of β is increased. The reason for this is that a larger value of β makes thevalue of the exponential function (e−β(1−u)) smaller, and thus produces a smaller valueof the diffusion coefficient for the drug. Due to the smaller diffusion coefficient, the drugdiffuses out of the polymer slower, and therefore a higher drug concentration remainsinside the polymer.
The effect of β on the normalised amount of drug released from the spherical drug carrier,is now investigated. The red vertical line in Figure 5.16 which intercepts the three colouredcurves at time t = 0.2891 indicates that the glassy-rubbery interface has reached the centreof spherical drug carrier. Varying the value of β only affects the release of the drug anddoes not influence the solvent concentration, as the glassy-rubbery interface for each casereaches the centre of spherical polymeric matrix at the same time. We also see that therelease rate of the drug is slower when the value of β is increased. This is consistent withthe results obtained in Figure 5.15; more drug remains in the polymer when the valueof β is large, causing a slower release rate of drug from the drug carrier. Additionallyall coloured curves in Figure 5.16 converge to one curve as time proceeds, meaning therelease rate of the drug concentration for each case approaches the same value. Thisphenomenon is due to the solvent concentration building up as time increases (that is,u→ 1), making the diffusion coefficient of drug concentration for each case approach thesame value (or, δ(u) → δ). In other words, the product of the exponential index for thenon-linear diffusion coefficient approaches zero, causing the non-linear diffusion coefficientof drug concentration to approach the maximum value, so that the effect of β diminishes.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.2
0.4
0.6
0.8
1
t
mt
Figure 5.16: The normalised amount of drug released from the spherical drug carrierversus time for λ = 1, µ = 0.01, δ = 0.1, and for β = 0 (blue solid), 5 (magenta dashes)and 20 (densely black dots). The thin vertical marker indicates the time tf for theseprofiles. The red dots represent the solution of Equation (2.15) for δ = 0.1.
113

Figure 5.16 also compares the exact analytical solution of the simple linear diffusionmodel with the numerical results of the NSPCM. We find the simple linear model doesnot provide a good approximation to the transport of drug in the NSPCM if the value ofβ does not equal zero, with this approximation becoming worse for increasing β.
5.4.2 The effect of varying λ
The non-dimensional parameter λ is the so-called Stefan number, and is one of the char-acteristic numbers of moving boundary problems with kinetic undercooling. The effectof varying λ is examined on the normalised amount of drug released from the sphericaldrug carrier. In the following comparisons, δ, µ and β are fixed to be 0.1, 0.1 and 0respectively.
0 2 4 6 8 10 120
0.2
0.4
0.6
0.8
1
t
mt
(a) Normalised amount of drug concentration released from the polymer.
0 0.2 0.4 0.6 0.8 1 1.20
0.2
0.4
0.6
0.8
t
mt
(b) Normalised amount of drug concentration released from the polymer.
Figure 5.17: Normalised amount of drug released from the spherical drug carrier versustime for µ = 0.1, δ = 0.1, β = 0 and for λ = 1 (blue solid), 10 (magenta dashes) and 50(densely black dots). The thin vertical markers indicate the time tf for each profile. Thered dots represent the solution of Equation (2.15) with δ = 0.1.
114

Figures 5.17(a) and 5.17(b) give the comparisons between the numerical results of theNSPCM for various values of λ, and the exact analytical solution of the simple lineardiffusion model, where we note the time scale of each plot. The coloured vertical linesindicate the time at which the glassy-rubbery interface reaches the centre of the sphericaldrug carrier for λ = 1 (blue solid), 10 (magenta dashes) and 50 (densely black dots). Forlarger values of λ, the glassy-rubbery interface requires a longer time to reach the centreof the spherical drug carrier, and the glassy region of the polymer exists for a longer time.Hence, the rate of drug released from the polymer is reduced. Under the scale used inFigure 5.17(a), the blue solid curve and red dotted curve cannot be distinguished. Furtherobservation of Figure 5.17(b) suggests the drug release for the NSPCM is converging tothe solution of the simple linear diffusion model as the value of λ approaches zero. Forsmall values of λ, the glassy-rubbery interface moves quickly and reaches the center ofthe polymeric ball before much of the drug concentration is released, and the movingboundary problem for drug diffusion switches to the fixed boundary problem. This is thesimple linear diffusion model with β = 0, and hence the results will be very similar.
10−6 10−5 10−4 10−3 10−2 10−1 100 1010
20
40
60
80
100
t
∂v∂r
∣∣∣∣r=1
Figure 5.18: Flux of drug at surface of the sphere versus time t for µ = 0.1, δ = 0.1,β = 0 and λ = 1 (blue solid) and 50 (black dashes). The red dots represent the solutionof (2.13) with δ = 0.1.
The behaviour for small λ is also examined through the flux of drug concentration at thesurface of the spherical drug carrier. The blue solid (numerical result of the NSPCM forµ = 0.1, δ = 0.1, β = 0 and λ = 1) and red dotted (solution of (2.13) with δ = 0.1) curvesin Figure 5.18 cannot be distinguished when time is larger than 10−3. This confirms thatthe simple linear diffusion model seems to be capable of modelling the transport of drug inthe NSPCM as λ approaches zero, except at the outset of the problem. This observation isfurther investigated in Figure 5.19(a), which is a magnified version of Figure 5.17(b). Onthis scale, the blue solid curve is clearly separate from the red dotted curve which supportsthe observation in Figure 5.18, that the simple linear model does not approximate theNSPCM for small times for reasons already stated. Finally, a comparison between thespecial case of the NSPCM, in which λ is set to zero, and the simple linear diffusion model
115

is investigated. The normalised amount of drug released from the spherical drug carrierat the outset of the problem is seen in Figure 5.19(b). The densely green (λ = 0) dashedcurve is very close to the blue (λ = 1) solid curve, but still clearly separate from the reddotted curve, representing the solution of Equation (2.15) with δ = 0.1, when time is less10−2. From the results of Figures 5.19(a) and 5.19(b), we can say that when λ is eitherzero or close to zero, the normalised amount of drug released from the polymer does notconverge to that of the simple linear diffusion model at the outset of the problem andtherefore has a different scaling to the simple linear diffusion model. Still, the simplelinear diffusion model is a good approximation to the transport of drug in the NSPCM ifthe value of λ approaches zero except for at very small times.
0 5 10 15 20 25 30 35 40 45 500
0.05
0.1
0.15
0.2
0.25
t× 10−3
mt
(a) Normalised amount of drug concentration released from the polymer for λ = 1(blue solid), 10 (magenta dashes) and 50 (densely black dots).
10−6 10−5 10−4 10−3 10−20
0.02
0.04
0.06
0.08
0.1
t
mt
(b) Normalised amount of drug concentration released from the polymer for λ = 0(densely green dashes), 1 (blue solid), 10 (magenta dashes) and 50 (densely blackdots).
Figure 5.19: Normalised amount of drug released from the spherical drug carrier versustime t for µ = 0.1, δ = 0.1, β = 0 and various values of λ. The red dots represent thesolution of Equation (2.15) with δ = 0.1.
116

5.4.3 The effect of varying µ
The kinetic under-cooling parameter µ is another characteristic parameter of the movingboundary problem. The effect of varying µ on the normalised amount of drug releasedfrom the spherical drug carrier is now examined.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.2
0.4
0.6
0.8
t
mt
(a) Normalised amount of drug concentration released from the polymer.
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
0.1
0.2
0.3
t
mt
(b) Normalised amount of drug concentration released from the polymer.
Figure 5.20: Normalised amount of drug released from the spherical drug carrier versustime for λ = 1, δ = 0.1, β = 0 and for µ = 0 (black solid), 0.1 (blue dashes) and 1 (denselygreen dots). The red dots represent the solution of Equation (2.15) with δ = 0.1.
Figures 5.20(a) and 5.20(b) show the comparison between the numerical results of theNSPCM for different values of µ and the exact analytical solution of the simple lineardiffusion model. Figure 5.20(a) depicts the portion of the whole time history of mt,whereas Figure 5.20(b) shows only small times. The blue dashed and green dotted verticallines are an indication that the glassy-rubbery interface has reached the centre of sphericaldrug carrier for each case. For larger values of µ, the glassy-rubbery interface requires alonger time to reach the centre of the spherical drug carrier such that the glassy region
117

of the polymer exists for a longer time and the rate of drug released from the polymeris reduced. The densely green dots clearly detach from the blue dashed curve beforethe majority of drug is released from the spherical drug carrier. Under the scale used inFigure 5.20(b) the blue dashed curve is now seen to separate from the red dotted curve,which is not depicted in Figure 5.20(a), and the black solid curve overlaps with the reddotted curve. Therefore the normalised drug release of the NSPCM converges to thesimple linear diffusion model when the value of µ is decreased towards to zero.
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
0.1
0.2
0.3
t
mt
Figure 5.21: Normalised amount of drug released from the spherical drug carrier versustime calculated analytically with (5.48), for λ = 1, δ = 0.1, β = 0, and for µ = 0 (blacksolid) and 1 (5.47) (green dashes). The red dots represent the solution of (2.15) withδ = 0.1.
Lastly, the investigation of µ is completed with a comparison between the asymptoticresults of the NSPCM and the analytical solution of the simple linear diffusion model. InFigure 5.21 the normalised drug release for µ = 1 clearly separates from the µ = 0 curve,however the black solid curve and the curve depicting the simple linear diffusion model(red dotted curve) cannot be distinguished without further magnification. The reasonfor this is the leading order term of mt calculated from the simple linear diffusion modelanalytically is O(
√t) which also appears in (5.48), the asymptotic solution to the problem
(5.13)–(5.12) for µ = 0. Hence to leading order they are similar, and again the simplelinear diffusion model is a good approximation to the transport of drug in the NSPCMas µ approaches zero, except for at very small times.
5.5 An alternate boundary condition for the drug transport at theglassy-rubbery interface
The equations governing transport of drug in the NSPCM are (5.13)–(5.15) togetherwith a Robin boundary condition at the glassy-rubbery interface. An alternate boundarycondition at this glassy-rubbery interface is the Dirichlet boundary condition suggested byNarasimhan and Peppas (1997a) and Radu et al. (2002). With this, the transport of drugwith a constant diffusion coefficient can be formulated using non-dimensional variables as
118

∂v
∂t= δ
r2∂
∂r
(r2∂v
∂r
)in s1(t) < r < 1, (5.61)
v = 0 at r = 1, (5.62)
v = vs, at r = s1(t), (5.63)
where vs is the non-dimensional value of drug concentration at the glassy-rubbery in-terface. Now we examine the modified NSPCM, with the solvent permeation and thetransport of drug in the polymeric ball given by (5.61)–(5.63) and (5.9)–(5.12) describingthe solvent permeation. The validity of this modified problem is investigated by consid-ering the normalised amount of drug released from the spherical drug carrier, obtainedby solving the model via the numerical scheme described in Section 5.2.
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
1.2
t
mt
Figure 5.22: Normalised amount of drug released from the spherical drug carrier forµ = 0.1, λ = 0.8, δ = 0.1 and β = 0. From top to bottom, the blue curves use the Dirichletboundary condition for drug transport at the glassy-rubbery interface as 1 (dots), 0.75(dashes) and 0.5 (dense dashes) respectively. The red solid curve uses the Robin boundarycondition for drug transport. The thin vertical marker indicates the time t = tf , at whichthe glassy-rubbery interface reaches the centre of the spherical drug carrier.
The normalised drug release for the two models with different boundary conditions atthe glassy-rubbery interface may be seen in Figure (5.22) . Among the four curves, onlythe red solid curve tends to one, meaning all drug has diffused out. The blue dottedcurve reaches a value above one, and the other two blue dashed curves go to values lessthan one, indicating the model with the Dirichlet boundary condition is not conservative.However, this modified NSPCM may still produce conservative results if the value of drugconcentrations at the glassy-rubbery interface is chosen and scaled to a non-dimensionalvalue appropriately.
119

5.6 Multi-layered system
Thus far, the investigation of a drug released from the NSPCM is based on a single-layereddevice, with the initial drug concentration being evenly distributed in the polymer. It ispossible to construct a drug delivery device with several levels of initial drug concentrationin different regions. The most simplest extension of the single-layered device is a two-layered device. Each layer in the two-layered device is considered to be made of thesame polymer such that the interior and exterior layer have the same characteristicsand diffusion mechanism. In the two-layered device considered here, the interior layeris embedded with drug while the exterior layer contains no drug, serving to extend thetime that the drug is released from the drug carrier. The governing equations of thetwo-layered device are the same as that of single-layered device. A cross-sectional viewof the two-layered device is showed in Figure 5.23. The lighter blue colour indicates theexterior layer which does not contain drug, and the darker blue star indicates the interiorregion where drug is embedded. The radius of the two-layered device is normalised toone, with the junction between the interior and exterior layers being normalised to r`.
Interior layer Exterior layer
r`
1
.
Figure 5.23: The cross-sectional view of the two-layered device.
The moving boundary problem is harder to deal with numerically than the fixed boundaryproblem and does not have any known exact analytical solution. A simple linear diffusionmodel that approximates the two-layered device is
∂v
∂t= 1r2
∂
∂r
(r2∂v
∂r
)in 0 < r < 1, (5.64)
v = 0 at r = 1, (5.65)∂v
∂r= 0 at r = 0, (5.66)
v(r, t = 0) = 1 in 0 < r < r`. (5.67)
120

This is a fixed boundary problem and does not consider the characteristics of the polymer,such as phase change effects or the interaction between solvent and polymer. The problem(5.64)–(5.67) also describes a single-layered device with a prescribed initial condition, andthe exact analytical solution of normalised drug release is
mt = 1r3`
6π2
∞∑n=1
(−1)n+1
n2
[ 1nπ
sin(r`nπ)− r` cos(r`nπ)] [
1− e−δ(nπ)2t]. (5.68)
5.6.1 Numerical procedure
The two-layered system is a moving boundary problem, and is solved numerically by usingthe scheme described in Section 5.2. There are three steps to the numerical procedure forsolving the two-layered device. The first step is to solve the Equations (5.9)–(5.12) forthe exterior layer until s1(t) is equal to r`. The second step involves both the drug andsolvent concentration together, as the glassy-rubbery interface has reached the junctionwhich separates the exterior and interior layers of the two-layered device. Equations(5.9)–(5.15) are solved for the two-layered device until s1(t) reaches the centre. The initialsolution for the solvent in this step is obtained from the numerical results calculated in thefirst step, with the initial solution for the drug being zero between s1(t) and the surfaceof the two-layered device, except at the radius r = s1(t) where the drug concentration isequal to one. The third step is to solve (5.16)–(5.21) for the two-layered device until alldrug has diffused out of the device.
5.6.2 Results
The two-layered device is compared to the simple linear diffusion problem (5.64)–(5.67)in order to examine the difference between the two modelling approaches. The effects ofvarying λ, µ and β are also investigated to check whether the observations made of theone-layered device are also present in the two-layered device.
t
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
r
u
Figure 5.24: Numerical profiles of solvent concentration in the two-layered device forµ = 0.1 and λ = 0.8. From right to left, the profiles are roughly chosen at t = 0.0456(magenta dots), 0.1, 0.2, 0.3, 0.3651 (black dashes), 0.4201 and 1 for the purpose of evendisplay.
121

t
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
r
v
Figure 5.25: Numerical profiles of drug concentration in the two-layered device for µ = 0.1,λ = 0.8, δ = 0.1 and β = 0. From right to left, the profiles are for t = 0.0456, 0.1, 0.2,0.3, 0.3651 (black dashes), 0.7, 1, 1.4951, 2.1951 and 4.9651.
The numerically calculated profiles of solvent and drug concentrations within the two-layered device are given in Figures 5.24 and 5.25. The curves for smaller times in Figure5.24 have different end points because the solvent concentration has only penetrated tothat point in the polymer at that time. The magenta dotted curve in Figure 5.24 is theprofile of solvent concentration when the glassy-rubbery interface reaches the junction oftwo layers, r` = 0.7937. The black dashed curves in Figures 5.24 and 5.25 are the profilesof solvent and drug concentrations corresponding to the time when the glassy-rubberyinterface reaches the centre of the two-layered device.
Figures 5.26(a) and 5.26(b) give the normalised amount of drug release from the two-layered device, calculated numerically. Figure 5.26(b) is a magnified version of Figure5.26(a). The magenta dashed line between time 0 and 0.05 indicates the time at whichthe glassy-rubbery interface reaches r`, and is labelled t`. The red vertical line betweentime 0.35 and 0.4 indicates the time at which s1 reaches the centre of the spherical two-layered device, labelled tf . In Figure 5.26(b) the blue solid curve is zero when time isless than approximately 0.1 and slowly increases after time passes the magenta dashedline. This flat section of the blue solid curve is due to the exterior layer of the two-layereddevice, which does not contain any drug. Hence the drug release will only start whenthe solvent penetrates into the interior layer of the two-layered device, which containsthe drug. The drug in the interior layer will then diffuse across the exterior layer of thetwo-layered device before reaching the surrounding environment.
122

0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
t
mt
(a) Normalised amount of drug concentration released from the device.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.1
0.2
0.3
0.4
t
mt
(b) Normalised amount of drug concentration released from the device.
Figure 5.26: Normalised amount of drug released from the spherical two-layered devicefor µ = 0.1, λ = 0.8, δ = 0.1 and β = 0. The thin vertical markers indicate the time t`(magenta dashes) and tf (red solid).
The effect of varying λ, µ and β on the two-layered device are examined in Figures 5.27,5.28 and 5.29, as well as comparing the results with the simple linear diffusion problem,represented by red dots. In all three figures, the blue solid curve is either very close to oroverlaying the red dots. Similar to the behaviour of the single-layered device, the simplelinear diffusion model (5.64)–(5.67) provides a moderate approximation to the two-layereddevice when any of the values of β, µ and λ are small and approach zero, except whenthe drug is first released from the device.
123

0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
t
mt
Figure 5.27: Normalised amount of drug released from the spherical two-layered devicesfor µ = 0.1, δ = 0.1 and β = 0 and for λ = 0.8 (blue solid) and 10 (green dashes). Thethin vertical markers indicate the time tf . Also the red dots represent (5.68) with δ = 0.1.
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
t
mt
Figure 5.28: Normalised amount of drug released from the spherical two-layered devicesfor λ = 0.8, δ = 0.1 and β = 0 and for µ = 0.1 (blue solid) and 1 (black dashes). The thinvertical markers indicate the time tf . Also the red dots represent (5.68) with δ = 0.1.
Finally the effect of a two-layered device on the mt is presented in Figure 5.30. Figure5.30(b) is the semi-log version of Figure 5.30(a). The red dotted curve signifying r` = 1, isactually a single layered device. The blue solid curve represents the mt from two polymericballs, with each only containing half of the initial drug embedded in the single layereddevice. Similarly the magenta dashed curve represents the mt from four polymeric balls,each containing a quarter of the initial drug embedded in the single layered device. Henceeach case has the same amount of drug released, with the same parameter values exceptr`. Both the one-layered and two-layered devices are formulated by the moving boundaryproblem (NSPCM) and have the same radius. The blue solid and magenta dashed curves
124

0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
t
mt
Figure 5.29: The normalised amount of drug released from the spherical two-layereddevice for λ = 0.8, µ = 0.1 and δ = 0.1 and for β = 0 (blue solid) and 10 (magentadashes). The thin vertical marker indicates the time tf . The red dots represent (5.68)with δ = 0.1.
in Figure 5.30(a) behave differently to the red dotted curve, being below this curve for themajority of the drug release process. The difference between the blue solid and red dottedcurves is more clear in Figure 5.30(b). The rate of drug release is greatly affected by theinitial drug loading in a multilayered device, and hence a multilayered device is able toprovide a desirable drug release rate and release pattern if the appropriate parametersare chosen.
0 2 4 600.20.40.60.8
1
t
mt
(a) Normalised amount of drug concentration re-leased from the device.
10−5 10−3 10−1 1010
0.20.40.60.8
1
t
mt
(b) Normalised amount of drug concentration re-leased from the device.
Figure 5.30: Normalised drug release mt versus t for λ = 0.8, µ = 0.1, δ = 0.1 and β = 0,with thin vertical marker indicating tf . The three curves are: one polymeric ball withr` = 1 (red dots); two polymeric balls with r` = 0.7937 (blue solid); and three polymericballs with r` = 0.6299 (magenta dashes).
5.7 Conclusion
The swelling controlled release drug delivery system has been investigated in this chapter.This moving boundary problem describes the solvent penetration and drug diffusion inthe rubbery part of the polymeric ball, coupling the two processes together and ignoring
125

the volume expansion due to the swelling polymer. This model (5.9)–(5.15) with β = 0is the spherical version of the model proposed by Cohen and Erneux (1988b) withoutvolume expansion. This model is also similar to that investigated by Lin and Peng (2005)(again, ignoring volume expansion), except here a non-linear diffusion coefficient is usedto further couple the solvent penetration and drug diffusion within the rubbery polymer.The process of transporting solvent in the rubbery polymer is modelled by the one-phaseStefan problem with kinetic undercooling which is investigated further in Chapter 3.The non-linear diffusion coefficient is an exponential function, dependent on the solventconcentration.
The model (5.9)–(5.15) is solved numerically by method of lines with finite differenceapproximations, and investigated asymptotically for the small time behaviour and in thelarge Stefan number limit. The small time behaviour of the model is not attempted byLin and Peng (2005). We find that at small times, the rate of solvent penetration, thespeed of the glassy-rubbery interface, and the rate of drug release are all dependent onthe kinetic undercooling parameter µ to leading order, and behave as ∂u/∂r(1, t) = O(1),ds1/dt = O(1), and mt = O(t) as t → 0+ respectively. Hence the sorption kineticsof the model is Case II diffusion, which induces a constant rate of drug release at thebeginning of the drug delivery process. We also provide two extra correction terms forthe asymptotic results in the limit of large Stefan number (when β = 0), and find thatthese results are consistent with the small time behaviour.
We have compared the model with the linear initial boundary value problem for drug dif-fusion in a spherical polymer which does not consider the interaction between solvent andpolymer. The analytic solution of mt for this simple linear problem is O(t1/2) as t→ 0+
which is different to the small time limit of the full problem (5.9)–(5.15). From comparingthese two problems numerically we found the linear initial boundary value problem is agood approximation for the full moving boundary problem when the parameters λ andµ are small and the parameter β is zero. The reason for this observation is that theglassy-rubbery interface moves so quickly that the moving boundary problem only existsfor a short amount of time before switching into the linear initial boundary value problemfor the subsequent times. In other words, the process of phase change is rapid thereforethe full problem turns into the linear initial boundary value problem while most drugconcentration is still not released. Also the non-linear drug diffusion coefficient becomesa constant diffusion coefficient as the one used in the linear initial boundary value prob-lem when the parameter β is zero. This shows the obvious and simple formulations ofmathematical modelling for a problem is sometimes sufficient instead of spending timewith sophisticated formulations to cover most underlying mechanisms. Additionally, theDirichlet boundary condition for drug concentration is used at the glassy-rubbery inter-face and we note that the resultant normalised drug release is only conservative if thevalue of drug concentration at this interface is chosen appropriately. Finally, the drugrelease of a two-layered model is investigated. We learn that using multi-layered drugdelivery devices with specified initial drug loading in each device can provide a desireddrug release pattern and release rate to suit a particular application.
126

Chapter 6
Swelling controlled drug release system: a model with twomoving boundaries
The swelling controlled release system is one of the primary controlled drug delivery sys-tems that uses polymeric devices in the pharmaceutical industry. Such a system employshydrophilic polymer networks as the drug carrier, where the drug is incorporated in thepolymer. These networks provide enhanced drug diffusion into the external medium dueto the countercurrent diffusion of an external solvent. The cause of this enhanced drugdiffusion is the swelling characteristics of the hydrophilic polymer in contact with anexternal solvent.
A spherical pellet made from a hydrophilic polymer is in a dry state (also referred to as aglassy state) when it is not in an aqueous environment. When water begins to penetrateinto the spherical pellet, the outer region of glassy polymer transforms into the rubberystate due to either polymer disentanglement, or polymer chain relaxation. This causesan increase in volume of the rubbery part of the spherical pellet. The drug in the glassyregion is yet to be dissolved, but the drug in the rubbery region is dissolved with enhanceddiffusivity. The spherical pellet will eventually stop swelling and start to dissolve whenthe polymer entanglement is adequately weak. From a mathematical modelling point ofview, there are two moving interfaces in the swelling-controlled release system: the glassy-rubbery interface and the volume expansion interface. The glassy and rubbery parts of thehydrophilic polymer are separated by the glassy-rubbery interface which moves inwardstowards the centre after the spherical pellet is embedded in the aqueous environment. Thevolume expansion interface separates the spherical pellet and the external solvent, movingoutwards as the spherical pellet swells, before moving inwards as when the spherical pelletstarts to dissolve.
Cohen and Erneux (1988b) propose a model for swelling-controlled release systems thatignores the polymer dissolution. Their work is based on the idea of the Higuchi (1963)model, which describes the transport of drug, and formulates the penetration of solvent asa one-phase Stefan problem [Astarita and Sarti (1978)]. Peppas et al. (1980) also proposea model for swelling-controlled release systems without including the polymer dissolution,which is similar to that proposed by Cohen and Erneux (1988b) except for the conditionsat the moving interfaces. Lin and Peng (2005) investigate a swelling-controlled drugrelease model for a spherical system which is the spherical version of Cohen and Erneux(1988b).
127

In this Chapter we are concerned with a mathematical model that is similar to that in Linand Peng (2005). The key difference is that we adopt a non-linear diffusion coefficientfor drug concentration, whereas these authors do not. In the context of the presentthesis, we see that the model treated in this Chapter is a direct generalisation of thattreated in Chapter 5. The added component is that we allow the polymer to swell due tothe penetration of solvent, meaning that we now have a two-moving boundary probleminstead of a single moving boundary problem. When the molar volume of solvent is high,the swelling of the polymer is no longer negligible (as assumed in Chapter 5), in whichcase the work in this Chapter is more relevant.
The numerical scheme used to solve the two-moving boundary problem in this Chapter isthe front-fixing transformation together with a finite difference spatial discretisation whichis briefly stated in Section 6.2. We show that our numerical scheme is conservative andmore accurate than that presented in Lin and Peng (2005). We perform an asymptoticanalysis of the problem in the small time limit, and in the limit of large Stefan numberλ in Section 6.3. In the small time analysis, we show that the kinetic under-cooling µ iscrucial for determining the initial speed of the moving boundaries, and the early rate ofdrug release. Lastly, we give a numerical analysis of the model, and investigate varyingthe different parameter values in Section 6.4 to examine their effect on the drug releaserate.
6.1 Mathematical model
The physical controlling process in the swelling-controlled release system, before the oc-currence of polymer dissolution is the solvent permeation. The model describing thissolvent permeation as well as the transport of drug in the system is
∂U
∂T= D
R2∂
∂R
(R2∂U
∂R
)in S1(T ) < R < S2(T ), (6.1)
U = Ue > U∗ at R = S2(T ), (6.2)
D∂U
∂R= −U dS1
dT at R = S1(T ), (6.3)
dS1dT = −k1 (U − U∗)n at R = S1(T ), (6.4)
and
∂V
∂T= 1R2
∂
∂R
(DV (U)R2∂V
∂R
)in S1(T ) < R < S2(T ), (6.5)
V = 0 at R = S2(T ), (6.6)
DV (U)∂V∂R
= − (V − Vi)dS1dT at R = S1(T ), (6.7)
accompanied by the volume expansion,
S32(T )− S3
2(0) = 3νm∫ S2(T )
S1(T )U(R, T )R2dR, (6.8)
128

where S2(0) is the initial radius of spherical polymer, and νm is the molar volume of thesolvent. The variables V (R, T ) and U(R, T ) are the concentration of drug and solvent inthe rubbery part of the polymeric ball respectively, where R is the radial distance and Trepresents time. Initially the concentration of the drug is the constant, V (R, 0) = Vi andthe concentration of the solvent within the polymer is the zero. The non-linear diffusioncoefficient in (6.5) is a function of solvent concentration, and is taken to be
DV (U) = Dve−β∗d
(1−U
Ue
), (6.9)
where Dv is the maximum diffusivity of the drug and β∗d is a dimensionless constantcharacterising the dependence of drug diffusivity on solvent,
There are two moving boundaries in (6.1)–(6.8) with their locations are denoted as R =S1(T ) for the glassy-rubbery interface and R = S2(T ) for the volume expansion interface.Diffusion of drug occurs only in the rubbery shell, S1(T ) < R < S2(T ); there is no drugdiffusion in the inner glassy core of the polymeric ball.
The model described by (6.1)–(6.8) is similar to that in Cohen and Erneux (1988b),Astarita and Sarti (1978), Lee and Peppas (1987), Siepmann et al. (1999), Siepmannand Peppas (2000), Wu et al. (2005) and Lin and Peng (2005). Physically, (6.5) isthe diffusion equation for the drug with a non-linear diffusion coefficient DV (U) in therubbery region of the polymer. The drug concentration vanishes on the surface of thepolymeric ball according to (6.6), and the moving boundary condition (6.7) is a result ofa mass balance for the drug concentration at the glassy-rubbery interface. The equationgoverning solvent permeation is (6.1) which assumes linear diffusion of the solvent inthe rubbery region of the polymer. On the surface of the polymeric ball, (6.2) statesthat the solvent concentration is equal to the equilibrium value of solvent in the fullyswollen polymer. The moving boundary condition (6.3) arises from a mass balance forthe solvent concentration at the glassy-rubbery interface, while (6.4) describes the swellingkinetics at the glassy-rubbery interface, relating the velocity of the interface to the solventconcentration that is over the threshold value at the interface. Equation (6.8) describes themass balance for the rubbery region of the swelling spherical pellet due to the expansionin volume. The increase in volume of the polymeric ball is due to the molar volume ofthe solvent in the rubbery region.
The model (6.1)–(6.8) is non-dimensionalised to become
∂u
∂t= 1r2
∂
∂r
(r2∂u
∂r
)in s1(t) < r < s2(t), (6.10)
u = 1 at r = s2(t), (6.11)∂u
∂r= −(u+ λ)ds1
dt at r = s1(t), (6.12)
un = −µds1dt at r = s1(t), (6.13)
and
129

∂v
∂t= 1r2
∂
∂r
(δv(u)r2∂v
∂r
)in s1(t) < r < s2(t), (6.14)
v = 0 at r = s2(t), (6.15)
δv(u)∂v∂r
= (1− v) ds1dt at r = s1(t), (6.16)
with
s32(t)− 1 = 3νm
∫ s2(t)
s1(t)
[1− 1
λ+ 1(1− u)]r2dr, (6.17)
where we have used the dimensionless parameters
u = U − U∗
Ue − U∗, v = V
Vi, t = TD
S22(0)
, r = R
S2(0) , s1(t) = S1(T )S2(0) , and s2(t) = S2(T )
S2(0) .
Here, D is the diffusivity of the solvent, Vi is the initial drug concentration in the polymer,Ue is the equilibrium value of solvent in the fully swollen polymer and U∗ is a thermo-dynamic threshold value of the solvent concentration that invokes the transformation ofthe polymer from the glassy state into the rubbery state. Now the initial concentrationof the drug is v(r, 0) = 1 and the initial concentration of the solvent is still zero. Thefunction δv(u) is defined to be
δv(u) = δe−β(1−u).
There are six dimensionless parameters in the problem (6.10)–(6.17):
δ = Dv
D, β = β∗d
(1− U∗
Ue
),
µ = D
k1S2(0)1
[Ue − U∗]n, λ = U∗
Ue − U∗, νm = νmUe, and n,
where δ is the ratio of the diffusion coefficient of drug at the outer boundary to thediffusion coefficient of solvent, β ≥ 0 is a measure of the non-linearity in the dependenceof diffusivity of the drug on concentration of solvent, and νm is the product of Ue with themolar volume of solvent, being between zero and one. As before, λ is the effective Stefannumber and µ is the kinetic under-cooling parameter. The processes of solvent and drugdiffusion are only coupled in one direction, in the sense that the double moving boundaryproblem (6.10)–(6.17) may be solved for u(r, t), s1(t) and s2(t) without reference to (6.14)–(6.16), however solving (6.14)–(6.16) requires the solutions of u(r, t), s1(t) and s2(t) asinputs. The system (6.10)–(6.17) also describes a one-phase Stefan problem for meltingan ice ball, with the unusual boundary condition (6.13), which models the effect of kineticundercooling on melting temperature of the ice (with µ = 0 , the problem (6.10)–(6.17)resembles a more classical Stefan problem with a constant melting temperature).
As the glassy-rubbery interface s1(t) reaches the centre of the spherical polymeric matrix,the boundary condition of the drug and solvent concentrations at the glassy-rubbery
130

interface are both switched to a zero flux condition due to the symmetric domain. Theinner glassy region vanishes and the spherical polymeric matrix is purely in the rubberystate. Now, the model describing the solvent permeation and the transport of drug in theswelling controlled release system, before the occurrence of polymer dissolution, no longerhas two moving boundaries. The non-dimensionalised version of the problem is now
∂u
∂t= ∂2u
∂r2 + 2r
∂u
∂rin 0 < r < s2(t), (6.18)
u = 1 at r = s2(t), (6.19)∂u
∂r= 0 at r = 0, (6.20)
and
∂v
∂t= 1r2
∂
∂r
(δv(u)r2∂v
∂r
)in 0 < r < s2(t), (6.21)
v = 0 at r = s2(t), (6.22)∂v
∂r= 0 at r = 0, (6.23)
with
s32(t)− 1 = 3νm
∫ s2(t)
0
[1− 1
λ+ 1(1− u)]r2dr. (6.24)
6.2 Numerical scheme
The problem (6.10)–(6.17) is a non-linear moving boundary problem with two movingboundaries, and is more difficult to treat numerically than standard linear diffusion prob-lems. The numerical scheme used to solve this moving boundary problem is the samescheme in Section 3.2.
A new independent variable is used to form the fixed boundary version of the problem(6.10)–(6.17) and it is
w = r − s1s2 − s1
.
The fixed boundary version of the problem (6.10)–(6.17) is
(s2 − s1)2∂u
∂t= ∂2u
∂w2 + 2(s2 − s1)[s1 + (s2 − s1)w]
∂u
∂w+
(s2 − s1)[(1− w)ds1
dt + wds2dt
]∂u
∂win 0 < w < 1, (6.25)
u = 1 at w = 1, (6.26)∂u
∂w= −(u+ λ)(s2 − s1)ds1
dt at w = 0, (6.27)
un = −µds1dt at w = 0, (6.28)
131

and
(s2 − s1)2∂v
∂t= δe−β(1−u)
{∂2v
∂w2 + 2(s2 − s1)[s1 + (s2 − s1)w]
∂v
∂w
}+
δe−β(1−u)β∂u
∂w
∂v
∂w+
(s2 − s1)[(1− w)ds1
dt + wds2dt
]∂v
∂win 0 < w < 1, (6.29)
v = 0 at w = 1, (6.30)∂v
∂w= 1δeβ(1−u)(1− v)(s2 − s1)ds1
dt at w = 0, (6.31)
with
s32 = 1 + νm
λ
λ+ 1(s32 − s3
1) + 3νmλ+ 1
∫ 1
0u [s1 + (s2 − s1)w]2 (s2 − s1)dw. (6.32)
The numerical method used to solve this resultant fixed boundary problem is the methodof lines with finite difference spatial discretisation as discussed intensively in Section 3.2.The MATLAB built-in ODE solver ode15i is also used in this section to solve the resultantsystem of ordinary differential equations (ODEs) obtained from discretising the problem(6.25)–(6.32).
The integral in the Equation (6.32) is subtle and not straightforward to discretise bythe finite difference spatial discretisation. There are two approaches to form an algebraicexpression for Equation (6.32). One is utilising a direct formulae for numerical integration.The other approach has three procedures. The first two procedures use the same ideaas in Radu et al. (2002). The first procedure takes the time derivative on both sides ofEquation (6.17) and the result is
3s22(t)ds2
dt = 3νmλ
λ+ 1
[s2
2(t)ds2dt − s
21(t)ds1
dt
]+ 3νmλ+ 1
∂
∂t
(∫ s2(t)
s1(t)ur2dr
). (I)
The second procedure applies the Leibniz integral rule to differentiate a definite integralwhose limits are a function of the differential variable on the last term of Equation (I)and the result is
∂
∂t
(∫ s2(t)
s1(t)ur2dr
)=∫ s2(t)
s1(t)
∂
∂t(ur2)dr + u(s2(t), t)s2
2(t)ds2dt − u(s1(t), t)s2
1(t)ds1dt
= r2∂u
∂r
∣∣∣∣s2(t)
s1(t)+ s2
2(t)ds2dt − u(s1(t), t)s2
1(t)ds1dt
= s22(t)∂u
∂r
∣∣∣∣r=s2(t)
+ λs21(t)ds1
dt + s22(t)ds2
dt . (II)
The last procedure transforms the first partial derivative of u with respect to r to thefirst partial derivative of u with respect to w on Equation (II).
132

Therefore the other form of Equation (6.17) for the fixed boundary problem is
(s2 − s1)ds2dt =νm(s2 − s1)ds2
dt + νmλ+ 1
∂u
∂w
∣∣∣∣w=1
, (6.33)
which can now be discretised by the finite difference spatial discretisation on the firstpartial derivative of u with respect to w. The first partial derivative of u with respect tow at w = 1 is discretised by the backward-difference formula.
The finite difference method firstly requires division of the domain of the problem inton equal intervals whose endpoints are the nodes wi = (i − 1)∆w, for i = 2, · · · , n + 1with w1 = 0 in the resultant fixed boundary problem. The forward-difference formula,backward-difference formula and centred-difference formula are used to approximate thespatial derivatives in the resultant fixed boundary problem into algebraic difference expres-sions. These algebraic expressions are then substituted back into the spatial derivativesof the partial differential equations in the resultant fixed boundary problem to form theordinary differential equation at each node.
The resultant ODE for drug obtained at the boundary w = 0 is
{[s1 + (s2 − s1)w1] (s2 − s1)2
} dvdt
∣∣∣∣w=w1
− δe−β(1−u1) [s1 + (s2 − s1)w1] 2(v2 − v1)(∆w)2 +
[s1 + (s2 − s1)w1] 2∆w (1− v1)(s2 − s1)ds1
dt −
δe−β(1−u1) 2∆w (s2 − s1)(v2 − v1)−
δe−β(1−u1)β [s1 + (s2 − s1)w1] u2 − u1∆w
v2 − v1∆w −
[s1 + (s2 − s1)w1] (s2 − s1)[(1− w1)ds1
dt + w1ds2dt
]v2 − v1
∆w = 0,
where ∆w is the distance between two nodes. The resultant ODE for drug obtained foreach interior node is{
[s1 + (s2 − s1)wi] (s2 − s1)2} dv
dt
∣∣∣∣w=wi
− δe−β(1−ui) [s1 + (s2 − s1)wi]vi+1 − 2vi + vi−1
(∆w)2 −
δe−β(1−ui) 1∆w (s2 − s1)(vi+1 − vi−1)−
δe−β(1−ui)β [s1 + (s2 − s1)wi]ui+1 − ui−1
2∆wvi+1 − vi−1
2∆w −
[s1 + (s2 − s1)wi] (s2 − s1)[(1− wi)
ds1dt + wi
ds2dt
]vi+1 − vi−1
2∆w = 0,
for i between 2 and n. The resultant equation obtained by discretising Equation (6.30) is
vn+1 = 0.
133

The resultant ODE for solvent obtained at the boundary w = 0 is
{[s1 + (s2 − s1)w1] (s2 − s1)2
} dudt
∣∣∣∣w=w1
− [s1 + (s2 − s1)w1] 2(u2 − u1)(∆w)2 −
[s1 + (s2 − s1)w1] 2∆w (u1 + λ)(s2 − s1)ds1
dt −2
∆w (s2 − s1)(u2 − u1)−
[s1 + (s2 − s1)w1] (s2 − s1)[(1− w1)ds1
dt + w1ds2dt
]u2 − u1
∆w = 0,
and the resultant ODE for solvent obtained for each interior node is{[s1 + (s2 − s1)wi] (s2 − s1)2
} dudt
∣∣∣∣w=wi
− [s1 + (s2 − s1)wi]ui+1 − 2ui + ui−1
(∆w)2 −
1∆w (s2 − s1)(ui+1 − ui−1)−
[s1 + (s2 − s1)wi] (s2 − s1)[(1− wi)
ds1dt + wi
ds2dt
]ui+1 − ui−1
2∆w = 0.
The resultant equation obtained by discretising Equation (6.26) is
un+1 = 1.
The equation for the inner moving boundary is also solved and the ODE is
ds1dt + u1
µ= 0.
In addition there are two equations in the fixed boundary problem for describing thevolume expansion of swelling polymer and either one is adequate to solve the position ofs2(t) numerically. The integral in Equation (6.32) can be computed numerically by thetrapezoidal method for the product
u [s1 + (s2 − s1)w]2
at every node between 0 and 1 by employing the MATLAB built-in function trapz. InEquation (6.33), the first partial derivative of u with respect to w at w = 1 is approximatedby the backward-difference formula as
∂u
∂w
∣∣∣∣w=1
= un+1 − un∆w +O (∆w) ,
therefore the resultant ODE of the outer moving boundary after discretisation is
νm(s2 − s1)ds2dt + νm
λ+ 1un+1 − un
∆w − (s2 − s1)ds2dt = 0.
The resultant set of ODEs obtained by discretising the problem (6.25) – (6.31) and Equa-tion (6.33) is re-arranged to a column vector form F(t,y,y′) = 0 in order to solve byMATLAB built-in ODE solver ode15i. For example, the vector y of resultant ODEs for
134

the case of 4 grid points (n = 3) is
y =(v1 v2 v3 v4 u1 u2 u3 u4 s1 s2
)T.
The sparsity pattern of Jy, the Jacobian of ∂F/∂y and the sparsity pattern of Jy′ , theJacobian of ∂F/∂y′ generated from the above ODEs for the case of 4 grid nodes are
Jy =
∗ ∗ ∗ ∗ ∗ ∗∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗
∗∗ ∗ ∗ ∗∗ ∗ ∗ ∗ ∗∗ ∗ ∗ ∗ ∗
∗∗
∗ ∗ ∗ ∗
, and Jy′ =
∗ ∗ ∗∗ ∗ ∗∗ ∗ ∗
∗ ∗ ∗∗ ∗ ∗∗ ∗ ∗
∗∗
.
These two sparsity matrices are supplied to the MATLAB built-in DAE solver ode15i
in order to speed up the computational process and reduce the computational time.
When the glassy-rubbery interface s1(t) reaches the centre of the spherical polymericmatrix, the model describing the solvent permeation and the transport of drug is nowthe problem (6.18)–(6.24) and is still a moving boundary problem with only one movingboundary which is the volume expansion front, s2(t). The numerical scheme used to solvethis moving boundary problem is also the same scheme in Section 3.2. The fixed boundaryversion of the problem (6.18)–(6.24) is
s22∂u
∂t= ∂2u
∂χ2 + 2χ
∂u
∂χ+ s2χ
ds2dt
∂u
∂χin 0 < χ < 1, (6.34)
u = 1 at χ = 1, (6.35)∂u
∂χ= 0 at χ = 0, (6.36)
and
s22∂v
∂t= δe−β(1−u)
(∂2v
∂χ2 + 2χ
∂v
∂χ
)+ δe−β(1−u)β
∂u
∂χ
∂v
∂χ+
s2χds2dt
∂v
∂χin 0 < χ < 1, (6.37)
v = 0 at χ = 1, (6.38)∂v
∂χ= 0 at χ = 0, (6.39)
with
s2ds2dt = νms2
ds2dt + νm
λ+ 1∂u
∂χ
∣∣∣∣χ=1
, (6.40)
135

by using a new independent variable which is
χ = r
s2.
The numerical method used to solve the problem (6.34)–(6.40) is also the method oflines with finite difference spatial discretisation. Unlike other terms in Equation (6.37)and (6.34) the term ∂v/∂χ divided by χ and ∂u/∂χ divided by χ can not be directlydiscretised by the difference-quotient formulae at χ = 0 because the singularity causedby the fraction 1/χ at χ = 0. The strategy of solving this type of singularity is discussedthoroughly in Section 5.2.
The resultant ODE for drug obtained at the boundary χ = 0 is
s22dvdt
∣∣∣∣χ=χ1
− 6δe−β(1−u1) v2 − v1(∆χ)2 = 0,
where ∆χ is the distance between two mesh points and χ1 = 0.
The resultant ODE for drug obtained for each interior node is
s22dvdt
∣∣∣∣χ=χi
− δe−β(1−ui) vi+1 − 2vi + vi−1(∆χ)2 − δe−β(1−ui) 2
χi
vi+1 − vi−12∆χ −
δe−β(1−ui)βui+1 − ui−1
2∆χvi+1 − vi−1
2∆χ − s2χids2dt
vi+1 − vi−12∆χ = 0,
for i between 2 and n, where χi = (i− 1)∆χ for i = 2, · · · , n+ 1. The resultant equationobtained by discretising Equation (6.38) is
vn+1 = 0.
The resultant ODE for solvent obtained at the boundary χ = 0 is
s22dudt
∣∣∣∣χ=χ1
− 6u2 − u1(∆χ)2 = 0.
The resultant ODE for solvent obtained for each interior node is
s22dudt
∣∣∣∣χ=χi
− ui+1 − 2ui + ui−1(∆χ)2 − 2
χi
ui+1 − ui−12∆χ − s2χi
ds2dt
ui+1 − ui−12∆χ = 0,
for i between 2 and n and the resultant equation obtained by discretising Equation (6.35)is
un+1 = 1.
The equation for the moving boundary s2 is also solved and the ODE is
νms2ds2dt + νm
λ+ 1un+1 − un
∆χ − s2ds2dt = 0.
136

As mentioned above, the resultant set of ODEs obtained by discretising the problem(6.34)–(6.40) is re-arranged to a column vector form F(t,y,y′) = 0 in order to solveby MALAB built-in ODE solver ode15i. For example, the sparsity pattern of Jy, theJacobian of ∂F/∂y and the sparsity pattern of Jy′ , the Jacobian of ∂F/∂y′ generatedfrom the above ODEs for the case of 4 grid nodes are
Jy =
∗ ∗ ∗ ∗∗ ∗ ∗ ∗ ∗ ∗ ∗∗ ∗ ∗ ∗ ∗ ∗ ∗
∗∗ ∗ ∗∗ ∗ ∗ ∗∗ ∗ ∗ ∗
∗∗ ∗ ∗
, and Jy′ =
∗∗ ∗∗ ∗
∗∗ ∗∗ ∗
∗
.
These two sparsity matrices are supplied to the MATLAB built-in DAE solver ode15i inorder to speed up the computational process and reduce the computational time.
In the pharmaceutical industry, it is of interest to compute the amount of drug releasedfrom the polymeric ball at time t, given by
mt =− 3δ∫ t
0e−β(1−u)s2
2∂v
∂r
∣∣∣∣r=s2
dt. (6.41)
This quantity is simply the integral of the outward flux of drug evaluated at the outerboundary r = s2(t), and normalised so that mt → 1 as t→∞. Similarly, the normalisedamount of drug concentration remaining in the polymer is
1−mt =s31(t) + 3
∫ s2(t)
s1(t)v(r, t)r2dr, (6.42)
which sums the drug concentration in the glassy and rubbery regions of the polymer,and approaches zero as t → ∞. The integrals in (6.41) and (6.42) are computed by theMATLAB built-in function trapz which uses trapezoidal integration. The outward flux ofdrug concentration at the surface of spherical polymer in (6.41) is calculated numericallyby using a backward difference formula.
The numerical scheme is tested for its conservative capabilities and accuracy by examiningmt and 1−mt.
Figure 6.1 is a plot of the normalised drug concentration released from the polymerover time calculated numerically according to (6.41). As expected, the blue solid curveincreases from zero to one after the onset of solvent penetration. The normalised drugconcentration remained in the polymer versus time, obtained numerically according toEquation (6.42) is given in Figure 6.2. The blue solid curve decreases from one to almostzero as time increases. As the blue solid curve in Figure 6.1 does not exceed one and the
137

curve in Figure 6.2 does not drop below zero, the problem (6.10)–(6.17) does not gain orlose any extra drug concentration due to the numerical method.
0 2 4 6 8 10 12 14 16 18 200
0.2
0.4
0.6
0.8
1
t
mt
Figure 6.1: The normalised amount of drug concentration released from the polymerversus time for δ = 0.1, β = 5.55, νm = 0.77, λ = 0.8, µ = 0.1 and n = 1.
0 2 4 6 8 10 12 14 16 18 200
0.2
0.4
0.6
0.8
1
t
1−mt
Figure 6.2: The normalised amount of drug concentration remained in the polymer versustime for δ = 0.1, β = 5.55, νm = 0.77, λ = 0.8, µ = 0.1 and n = 1.
The curve in Figure 6.3 shows the numerical error generated by subtracting 1−mt wheremt is given in Figure 6.1, and defined by (6.41) and 1−mt given in Figure 6.2 defined by(6.42). The curve in Figure 6.3 fluctuates at the beginning but steadies with the numericalerror approximately 1 × 10−5. As the numerical error does not increase over time, thisbehaviour is what “mass conservative” is understood to mean. Therefore the method oflines with a finite difference spatial discretisation is considered to be a reliable numericalmethod in which the total concentration of drug is conserved.
138

0 2 4 6 8 10 12 14 16 18 20−1
0
1
2 ·10−5
t
Error
Figure 6.3: The numerical error of the problem (6.10)–(6.17) for δ = 0.1, β = 5.55,νm = 0.77, λ = 0.8, µ = 0.1 and n = 1.
6.2.1 A comparison with published results for outward flux
The model (6.10)–(6.17) with β = 0 is studied in Lin and Peng (2005) for the swellingcontrolled release system. Lin and Peng applied a numerical scheme that involves an ap-proximate similarity solution on each time step that unfortunately becomes less accurateas time progresses, and as a consequence, their results for moderate to large times areunreliable. Most notably, our numerical results for the flux ∂v/∂r|r=s2 behave very differ-ently to the corresponding results in Lin and Peng (2005). In Figures 6.4(a) and 6.4(b),the outward flux of drug concentration at the surface of a polymeric ball, is plotted for avariety of parameter values. All the parameter values and scalings on each axis are thesame as those used in Figures 13, 14 and 15 of Lin and Peng (2005). The blue solid curvesare taken from Lin and Peng (2005) by scanning the required figures and digitising thedata, while the red dashed curves are the numerical solutions to (6.10)–(6.17). All resultsfrom Lin and Peng (2005) have a distinct local minimum followed by a sharp rise, whereasour numerical results are monotonically decreasing. This decrease is expected as the flux∂v/∂r → 0 as t→∞ for all r. As the drug concentration remaining in the polymeric ballis continuously decreasing, there would not be sufficient drug concentration remaining todiffuse out and cause the outward flux of drug at the surface of the polymeric ball to turnupwards. Hence we conclude the method of lines with a finite difference spatial discreti-sation is much more accurate than that used by Lin and Peng (2005), and captures theexpected behaviour.
139

−µλ∂v∂r
∣∣∣∣r=s2
10−3 10−2 10−1 100 101 1020
0.2
0.4
0.6
0.8
1
Time tλ/(µ2)
(a) The outward flux of drug concentration, calculated for β = 0, δ = 1, νm = 0.116, λ = 1and µ = 0.2, with profiles from top to bottom drawn for n = 1, 5 and 10.
10−3 10−2 10−1 100 101 102 10310−2
10−1
100
Time tλ/(µ2)
−µλ∂v∂r
∣∣∣∣r=s2
(b) The outward flux of drug concentration, calculated for β = 0, δ = 1, νm = 0.116, λ = 1and n = 1, with profiles for µ = 0.5, 0.2, 0.1 and 0.05, as indicated.
Figure 6.4: The comparison of our numerical results with Lin and Peng (2005) for theoutward flux of drug concentration v at the surface of spherical polymer over time. Theblue solid curves are results obtained by Lin and Peng (2005) and the red dashed curvesare our numerical solutions to (6.10)–(6.17).
6.3 Asymptotic analysis
6.3.1 Small-time behaviour
The asymptotic analysis for small time behaviour of the problem (6.10)–(6.17) is criticalbecause it can reveal the initial behaviour and serves as an indication of whether theproblem (6.10)–(6.17) possesses the two main features of the Case II diffusion or not.The small time solutions are also important for the numerical method described in Section
140

6.2, because they serve as the initial conditions. The method of obtaining the small timesolution is the same as that outlined in Section 5.3.1. Two new variables vs(r, t) andus(r, t) are introduced to replace v(r, t) and u(r, t) respectively, defined as
vs(r, t) = v(r, t)r, and us(r, t) = u(r, t)r.
The non-dimensional model based on these two new dependent variables is
∂us∂t
= ∂2us∂r2 in s1(t) < r < s2(t),
(6.43)
us = s2 at r = s2(t), (6.44)
s1∂us∂r− us = −(us + λs1)s1
ds1
dt at r = s1(t), (6.45)
uns = −µsn1ds1
dt at r = s1(t), (6.46)
and
∂vs∂t
= δe−β(
1−usr
) [∂2vs∂r2 + β
r2
(∂us∂r− us
r
)(∂vs∂r− vs
r
)]in s1(t) < r < s2(t),
(6.47)
vs = 0 at r = s2(t), (6.48)
δe−β(
1−uss1
) (s1∂vs∂r− vs
)= s1(s1 − vs)
ds1
dt at r = s1(t), (6.49)
with
s32(t) = 1 + νm
λ
λ+ 1(s2 − s1)3 + 3νmλ
λ+ 1s1s2(s2 − s1) + 3νmλ+ 1
∫ s2(t)
s1(t)usrdr. (6.50)
The fixed boundary version of problem (6.43)–(6.50) uses the independent variable w
defined in Section 6.2 and is
(s2 − s1)2 ∂us∂t
= ∂2us∂w2 + (s2 − s1)
[(1− w)ds1
dt + wds2
dt
]∂us∂w
in 0 < w < 1, (6.51)
us = s2 at w = 1, (6.52)
s1∂us∂w− (s2 − s1)us = −(s2 − s1)(us + λs1)s1
ds1
dt at w = 0, (6.53)
uns = −µsn1ds1
dt at w = 0, (6.54)
and
141

(s2 − s1)2 ∂vs∂t
= δe−β
(1−
us[s1 + (s2 − s1)w]
)∂2vs∂w2 +
δβ
[s1 + (s2 − s1)w]3e
−β
(1−
us[s1 + (s2 − s1)w]
)×{
[s1 + (s2 − s1)w] ∂us∂w− (s2 − s1)us
}×{
[s1 + (s2 − s1)w] ∂vs∂w− (s2 − s1)vs
}+
(s2 − s1)[(1− w)ds1
dt + wds2
dt
]∂vs∂w
in 0 < w < 1, (6.55)
vs = 0 at w = 1, (6.56)
δe−β(
1−uss1
) [s1∂vs∂w− vs(s2 − s1)
]= s1(s1 − vs)
ds1
dt (s2 − s1) at w = 0, (6.57)
with
s32(t) = 1 + νmλ
λ+ 1[(s2 − s1)3 + 3s1s2(s2 − s1)
]+
3νmλ+ 1(s2 − s1)
∫ 1
0us [s1 + (s2 − s1)w] dw. (6.58)
Also the differential form of Equation (6.58) is
(s2 − s1)s2ds2dt =νm(s2 − s1)s2
ds2dt −
νmλ+ 1(s2 − s1) + νm
λ+ 1∂us∂w
∣∣∣∣w=1
. (6.59)
The small time behaviour of the problem implies there is a very tiny region of rubberypolymer at the surface of the spherical pellet. This rubbery region of the polymer is justformed after the spherical pellet is immersed in an aqueous environment. Therefore theglassy-rubbery interface s1 should be less 1 and also very close to 1. Also the volume ofpolymer would only swell a little bit. Hence variables vs, us, ds1/dt and s2 in the problem(6.51)–(6.58) are expanded in power series of 1− s1 and are
vs ∼ vs0(w) + vs1(w)(1− s1) + vs2(w)(1− s1)2 + · · · ,
us ∼ us0(w) + us1(w)(1− s1) + us2(w)(1− s1)2 + · · · ,ds1dt ∼ g0 + g1(1− s1) + g2(1− s1)2 + · · · ,
s2 ∼ 1 + h1(1− s1) + h2(1− s1)2 + · · · , as s1 → 1.
Variables vs, us, ds1/dt and s2 are then substituted back to (6.51)–(6.58) to solve for
vs0(w), vs1(w), vs2(w), · · · , us0(w), us1(w), us2(w), · · · ,
g0, g1, g2, · · · , and h1, h2, · · · .
142

The resulting solutions for vs0(w), vs1(w), us0(w), us1(w), g0, g1 and h1 are
vs0 = 0, vs1 = 1δµ(1− νm)(1− w),
us0 = 1, us1 = νm1− νm
− 11− νm
(1 + 1 + λ
µ
)(1− w),
g0 = −1µ, g1 = n(1 + λ)
µ2(1− νm) , and h1 = νm1− νm
,
by using the method described in Section 3.3 and do not contain the parameter β. Theeffect of β can only be investigated by studying higher order terms therefore the resultingsolutions for vs2(w), us2(w), g2 and h2 are
vs2 = β(1 + λ)δµ2(1− νm)2 (1− w)− [δνm + (2 + 2δn+ 2δnλ+ 4δµ)(1− νm)]
2δ2µ2(1− νm)3 (1− w)−
[νm + δβ(1 + λ)(1− νm)]2δ2µ2(1− νm)3 (1− w2),
us2 = h2 −{(
1 + 1 + λ
µ
)h2 −
(1 + λ)µ2(1− νm)2 [1 + µ(2− νm) + n(1 + λ)]
}(1− w)+
(1 + λ)νm2µ2(1− νm)3 (1− w2),
g2 = n
2µ3(1− νm)3
{2ν2mµ(1 + λ) + νm(3n− 1)(1 + λ)2 − (3n− 1)λ2−
(6n+ 2µ)λ− 1− 3n− 2µ} , and
h2 = −νm2µ(1− νm)3 [1 + 2µ(1− νm)] .
The asymptotic series of ds1/dt in terms of 1− s1 is
ds1dt =−1
µ+ n(1 + λ)µ2(1− νm)(1− s1) + n
2µ3(1− νm)3
{2ν2mµ(1 + λ) + νm(3n− 1)(1 + λ)2−
(3n− 1)λ2 − (6n+ 2µ)λ− 1− 3n− 2µ}
(1− s1)2 + · · · ,
and after integration with respect to t, and balancing out the terms of the asymptoticexpansion, the resultant asymptotic series of s1 is
s1(t) ∼1 + g0t−12g0g1t
2 + 16(g0g
21 + 2g2
0g2)t3 + · · · as t→ 0+.
This is used to determine the asymptotic series of v, u and s2 in terms of t. The smalltime behaviour of the problem (6.10)–(6.17) are
u(r, t) ∼1− 1 + λ
µ
(1− rr
)− 1 + λ
2µ2
(νm
1− νm
)(1− r)2
r+{(
1 + λ
µ3
)1r×
[µ+ (µ− 1)(1− r)− (1− r)2]+ 1
2
(1 + λ
µ4
)1r×[
−2µ2 + 2µ(2 + µ+ n+ nλ)(1− r) + (4µ− 1)(1− r)2] 11− νm
+
(1 + λ)(1− µ)µ4
1(1− νm)2
(1− r)2
r− 1
2
(1 + λ
µ4
)1
(1− νm)3(1− r)2
r
}t+ · · · , (6.60)
143

v(r, t) ∼ 1δµ
(1− rr
)[1 + 1
2δµ
(νm
1− νm
)(1− r) + β
2µ(1 + λ)(1− r)]
+
12δ2µ4(1− νm)3
1r
{[2δµ2 − 2µ(1− δµ)(1− r)− 2µ(1− r)2
]ν3m−[
4δµ2 + 2µ(δn+ δnλ+ 4δµ− 1)(1− r)− (1 + 2µ)(1− r)2]ν2m+[
2δµ2 + (2µ+ 10δµ2 + 4δµn+ 4δµnλ)(1− r)]νm−
2µ [1 + 2δµ+ δn(1 + λ)] (1− r)+
δβ(1 + λ)νm(1− νm)(1− r)[1− r + 2µ(2− r)(1− νm)
]}t+ · · · (6.61)
s1(t) ∼1− t
µ+ n(1 + λ)
2µ3(1− νm) t2 + n
6µ5(1− νm)3
{(1− 3n)λ2 − (6n+ 2µ)λ− 1− 3n−
2µ+ νm(3n− 1)(1 + λ)2 + 2ν2mµ(1 + λ)− n(1 + λ)2(1− νm)
}t3 + · · · , (6.62)
s2(t) ∼1 + νmµ(1− νm) t−
νm2µ3(1− νm)3 {1 + (1− νm) [2µ+ n(1 + λ)]} t2 + · · · , (6.63)
as t→ 0+.
The small time behaviour of normalised drug release mt is calculated as
mt =− 3δ∫ t
0s2
2∂v
∂r
∣∣∣∣r=s2
dt
∼ 3µt− 3
2δµ3(1− νm)2
[1 + δn(1 + λ)(1− νm) + 2δµ(1− νm)2
]t2 + · · · , (6.64)
as t → 0+, and which does not contain the parameter β up to the O(t2). As t → 0, thespeed of the two moving fronts are both O(1) as well as the flux of solvent at the volumeexpansion front. This phenomenon is often called non-Fickian or Case II diffusion in thepharmaceutical literature and is quite different to the classical one-phase Stefan problem(6.10)–(6.17) with µ = 0 and νm = 0. In the classical one-phase Stefan problem, thespeed of the glassy-rubbery interface is O(t−1/2) as t → 0. Hence the kinetic boundarycondition, (6.13) is important for determining the small time behaviour of the swellingcontrolled release system. Further, the problem with µ > 0 leads to mt = O(t) as t→ 0+
which means a constant rate of drug release at early times. This initial rate of drug releaseis a design output that is often desirable in the pharmaceutical industry.
The small time asymptotic result for the glassy-rubbery interface (6.62), is comparedto the numerical result in Figure 6.5(a). Figure 6.5(b) compares the numerical resultfor the normalised amount of drug released from the spherical drug carrier to the smalltime asymptotic result (6.64). The small time asymptotic result of s1 diverges from thenumerical result when time is approximately 0.1, and hence it follows the numerical resultfor 7% of the whole time history. However the small time asymptotic result of mt onlyfollows the numerical result for approximately 1.5% of the whole time history, the reasonbeing that the small time asymptotic result of s1 (6.62) is order of t3 whereas the smalltime asymptotic result of mt (6.64) is only order of t2.
144

0 0.2 0.4 0.6
0.6
0.8
1
t
s1
(a) Glassy-rubbery interface, s1 versus time
0 0.05 0.10
0.1
0.2
t
mt
(b) Normalised drug release, mt versus time
Figure 6.5: Comparison of numerical results (blue solid) of problem (6.10)–(6.17) forδ = 0.1, β = 5.55, νm = 0.1, λ = 1, µ = 1 and n = 1 with small time asymptotic results(6.62) and (6.64) (red dashes).
0 0.05 0.1 0.15 0.2 0.250.8
0.85
0.9
0.95
1
t
s1(t)
Figure 6.6: A comparison of numerical result (blue solid) of problem (6.10)–(6.17) forδ = 0.1, β = 5.55, νm = 0.687, λ = 1, µ = 1 and n = 1 with small time asymptotic result(6.62) (red dashes).
Figure 6.6 also compares numerical result to the small time asymptotic result for thetime history of glassy-rubbery interface s1, however now the value of parameter νm islarger than that in Figure 6.5(b). The small time asymptotic result diverges from thenumerical result when time is less than 0.05, and can only follow the numerical resultfor approximately 2.8% of the whole time history (the glassy-rubbery interface s1 reachesthe centre of the polymeric ball at time t = 1.4544 in this case). This earlier divergencein Figure 6.6 than in Figure 6.5(b) is because the small time asymptotic result of thetime history of glassy-rubbery interface (6.62) breaks down as νm → 1−, due to thedenominator 1− νm.
6.3.2 Large “Stefan number” limit
The small time analysis of the problem (6.10)–(6.17) only provides approximate solutionsthat are valid in the beginning of the problem. Now we seek an approximate solution
145

which is valid at larger times, and hence we investigate the asymptotic limit for largevalues of the so-called Stefan number, λ. The problem (6.10)–(6.17) is transformed into
1λ
∂u
∂τ= ∂2u
∂ρ2 + 2ρ
∂u
∂ρin σ1(τ) < ρ < σ2(τ), (6.65)
u = 1 at ρ = σ2(τ), (6.66)∂u
∂ρ= −
(1 + u
λ
) dσ1dτ at ρ = σ1(τ), (6.67)
un = −dσ1dτ at ρ = σ1(τ), (6.68)
and
1λ
∂v
∂τ= δe−β(1−u)
(∂2v
∂ρ2 + 2ρ
∂v
∂ρ+ β
∂u
∂ρ
∂v
∂ρ
)in σ1(τ) < ρ < σ2(τ), (6.69)
v = 0 at ρ = σ2(τ), (6.70)
δe−β(1−u)∂v
∂ρ= 1λ
(1− v)dσ1dτ at ρ = σ1(τ), (6.71)
withdσ2dτ = νm
1− νmλ
λ+ 1∂u
∂ρ
∣∣∣ρ=σ2
, (6.72)
by using four dimensionless parameters
ρ = λ
µr, τ = λ
µ2 t, σ1(τ) = λ
µs1(t) and σ2(τ) = λ
µs2(t),
for the asymptotic analysis in the limit of large λ. Variables v, u, σ1 and σ2 in the problem(6.65)–(6.72) are expanded in power series of 1/λ as
v =v0(φ, τ) + v1(φ, τ)/λ+ v2(φ, τ)/λ2 + · · · ,
u =u0(φ, τ) + u1(φ, τ)/λ+ u2(φ, τ)/λ2 + · · · ,
σ1(τ) =σ10(τ) + σ11(τ)/λ+ σ12(τ)/λ2 + · · · ,
σ2(τ) =σ20(τ) + σ21(τ)/λ+ σ22(τ)/λ2 + · · · ,
and substituted back to the problem (6.65)–(6.72) to obtain the solution of each term inthe asymptotic series. The resulting solutions of v0, u0, σ10 and σ20 are
v0 =0,
u0 =1− σ210σ20
σ20 + σ10(σ20 − σ10)
(1ρ− 1σ20
),
τ =ρf − σ10 + 12νm
(ρ2f − νmσ2
10
)− 1
2νm(1− νm)1/3
(ρ3f − νmσ3
10
)2/3, and
σ20 =(ρ3f − νmσ3
101− νm
)1/3
,
by using the method described in Section 3.4 and ρf = λ/µ is a constant.
146

The leading order term, v0 is zero hence we need to find the next order term, v1. Theresulting solution of v1 is
v1 = 1δβ
eβσ2
10(σ20 − ρ)ρ[σ20 + σ10(σ20 − σ10)] − 1
.Therefore the asymptotic solutions of the problem (6.65)–(6.72) in the limit of large λ are
v = 1δβ
eβσ2
10(σ20 − ρ)ρ[σ20 + σ10(σ20 − σ10)] − 1
1λ
+O
( 1λ2
)(6.73)
u = 1− σ210σ20
σ20 + σ10(σ20 − σ10)
(1ρ− 1σ20
)+O
( 1λ
)(6.74)
σ2 =(ρ3f − νmσ3
101− νm
)1/3
+O
( 1λ
)(6.75)
and τ = ρf − σ10 + 12νm
(ρ2f − νmσ2
10
)− 1
2νm(1− νm)1/3
(ρ3f − νmσ3
10
)2/3. (6.76)
The outward flux of drug concentration at the surface of a polymeric ball in the swellingcontrolled release system is
−∂v∂r
∣∣∣∣r=s2
=− ρf∂v
∂ρ
∣∣∣∣ρ=σ2
= 1δ
ρfσ210
σ20[σ20 + (σ20 − σ10)σ10]1λ
+ · · · . (6.77)
The asymptotic results for s1 and s2 in the limit of large λ are compared with the numericalresults in Figures 6.7(a) and 6.7(b).
0 5 10 15 200
0.2
0.4
0.6
0.8
1
t
s1
(a) Glassy-rubbery interface s1, versus time
0 5 10 15 201
1.02
1.04
t
s2
(b) Volume expansion interface s2, versus time
Figure 6.7: The comparison of numerical results (blue solid) of Equation (6.10)–(6.17)for δ = 0.1, β = 3, n = 1, µ = 1, λ = 100 and νm = 0.1 with large λ asymptotic results(6.76) and (6.75) (red dashes).
The large λ asymptotic result for s1 diverges from the numerical result when the glassy-rubbery interface approaches the centre of the polymeric ball, as is the case in the one-phase Stefan problem with kinetic undercooling. Similar behaviour is observed in thecomparison of the numerical result with large λ asymptotic result for s2. Figure 6.8compares numerically calculated solvent profiles with asymptotic results at different times.
147

The large λ asymptotic result for the solvent profiles also diverges from the numericalresults at approximately time t = 18, as in Figure 6.8. This is the time when the glassy-rubbery interface approaches the centre of the polymeric ball.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
r
u
Figure 6.8: The comparison of numerical results (blue solid curves) of the problem (6.10)–(6.17) for δ = 0.1, β = 3, n = 1, µ = 1, λ = 100 and νm = 0.1 with large λ asymptoticresult (6.74) (red dashed curves) at times t =3, 9, 15, 18 and 18.4.
Figure 6.9 gives the numerical and large λ asymptotic results for the drug profiles atvarious times. The asymptotic results for drug concentration start to diverge from thenumerical results at time t = 3, which is much earlier than for the solvent concentrationin Figure 6.8. Most notably the asymptotic profiles diverge from the numerical profilesaround the position of the glassy-rubbery interface. This approximation is worse whenthe value of β is larger, and therefore the existing large λ asymptotic expansion for thedrug concentration is not a good choice for the swelling controlled release system.
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
r
v
Figure 6.9: The comparison of numerical results (blue solid curves) of the problem (6.10)–(6.17) for δ = 0.1, β = 3, n = 1, µ = 1, λ = 100 and νm = 0.1 with large λ asymptoticresult (6.73) (red dashed curves) at times t =3, 9, 15, 18 and 18.4.
148

6.4 Result
Representative numerical results for the swelling controlled drug release system (6.10)–(6.17) are presented in Figures 6.10, 6.11 and 6.12. The parameter values used in thesefigures are chosen by taking the typical dimensional quantities from Narasimhan andPeppas (1997a), Siepmann et al. (1999) and Wu et al. (2005), and rescaling appropriately.The time history of the glassy-rubbery interface r = s1(t) and the volume expansioninterface r = s2(t) are presented in Figures 6.10 and 6.11 respectively. The glassy-rubberyinterface reaches the centre of the polymeric ball at tf = 0.4606. At this time, the volumeexpansion interface has increased to 1.5462 and the polymer ball has swollen to 3.70 timesits initial size. The effects of this swelling of the polymer also appear in the solvent anddrug concentration profiles, depicted by the profiles at each time starting at a differentposition. The profiles of solvent and drug concentration at tf = 0.4606 are indicated bythe blue dashed curves in Figures 6.11(a) and 6.11(b). After this time, curves of solventand drug concentration profiles all have the same end point: the centre of the swellingpolymer. At time tf , the boundary conditions for solvent and drug concentrations atr = s1(t) are both replaced by no flux conditions at r = 0. The swelling of the polymercontinues and the volume expansion interface reaches 1.6388 at large times, resultingin the polymeric ball swelling to 4.40 times its initial size with these parameter values.When time is just over 1.2, the profile for solvent concentration approaches one, and thewhole polymeric ball is almost fully saturated with solvent. At this time, the profile ofdrug concentration continues to decline and approach zero. The normalised amount ofdrug released from the polymeric ball for the swelling controlled release system over timeis given in Figure 6.12. The blue solid curve has a relative flat section at small times,indicating that most of the drug has not yet been released from the polymeric ball.
0 0.2 0.400.20.40.60.8
1
t
s1
(a) Glassy-rubbery interface s1, versus time
0 0.5 1 1.5 21
1.2
1.4
1.6
t
s2
(b) Volume expansion interface s2, versus time
Figure 6.10: Numerical results of the problem (6.10)–(6.17) for parameter values δ = 0.1 ,β = 5.55 , νm = 0.77 , λ = 0.8 , µ = 0.1 and n = 1 .
149

t = 0.001
t = 0.01
t = 0.1t = 0.3
t = 0.4606
t = 0.6106
t = 1.2106
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.60
0.2
0.4
0.6
0.8
1
r
u
(a) Profiles of solvent concentration for times t = 0.001 , 0.01, 0.1, 0.3, 0.4606 (bluedashes), 0.6106 and 1.2106 .
t
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.80
0.2
0.4
0.6
0.8
1
r
v
(b) Profiles of drug concentration for times t = 0.01 , 0.4606 (blue dashes), 0.9606,2.0606, 3.9606 and 10.4606. The arrow indicates increasing time.
Figure 6.11: Numerical results for the same parameter values as in Figure 6.10.
150

0 2 4 6 8 10 12 14 16 18 200
0.2
0.4
0.6
0.8
1
t
mt
Figure 6.12: Normalised drug release from a polymeric ball versus time for the swellingcontrolled drug release system with δ = 0.1, β = 5.55, νm = 0.77, λ = 0.8, µ = 0.1 andn = 1.
6.4.1 The effect of varying the parameters
One particular aim in designing controlled release systems is the need to vary the rate ofdrug release in order to fit certain applications. There are four important parameters inthe swelling controlled release system; λ, µ, β and νm. The effects of varying λ, µ and β
on the drug concentration released from the spherical drug carrier have been investigatedin Section 5.4 for the swelling controlled release system without considering any volumechange. The conclusions drawn in Section 5.4 are that the period of drug release isextended if the values of these parameters is large. This conclusion is verified with theswelling controlled release system by testing the behaviour of drug release.
Figure 6.13(a) plots mt for different values of λ. Varying this parameter has a notableeffect on the drug release. At t = 4, almost all of the drug has been released for the casewith λ = 1, but only approximately 60% of the drug has been released for the case ofλ = 50. Figure 6.13(b) plots mt for various values of µ, and again there is a significanteffect on the drug release. For example, at t = 4 almost of the drug is released for the caseof µ = 0.1, but less than 70% of drug has been released for the case of µ = 10. The reasonfor the longer period of drug release for either large µ or λ is that the time taken for theglassy-rubbery interface to reach the centre of the drug carrier is longer (indicated by thecoloured vertical line for each case) and the glassy part of the polymer which contains thedrug that is still yet to be dissolved, exists for a longer time. Therefore, the rate of thedrug dissolving from the glassy part to the rubbery part in the polymeric drug carrier isslowed and induces a slower rate of drug release from the polymer.
151

0 2 4 6 8 10 12 140
0.2
0.4
0.6
0.8
1
t
mt
(a) mt for µ = 0.1 and different values of λ that are 1 (red solid), 10 (blue dashes)and 50 (black dots).
0 2 4 6 8 10 12 140
0.2
0.4
0.6
0.8
1
t
mt
(b) mt for λ = 1 and different values of µ that are 0.1 (red solid), 1 (blue dashes)and 10 (black dots).
Figure 6.13: The normalised drug concentration released from the swelling polymer versustime for n = 1, δ = 0.1, β = 1, νm = 0.5 and different values of µ and λ. The thin verticalmarkers indicate the time tf for the profiles of corresponding colour.
Figure 6.14 gives mt for different values of β, where Figure 6.14(b) is a magnified versionof Figure 6.14(a). The rate of drug release is slowed at the beginning for larger values ofβ, because more drug remains in the polymer. All the coloured curves converge togetherin Figure 6.14(a) as time increases, meaning the release rate of the drug concentration foreach case approaches the same value. This phenomenon is due to the solvent concentrationbuilding up as time proceeds and forcing the drug diffusion coefficient for each case toapproach the same value (that is, δv(u) → δ as µ → 1). The exponential index in δv(u)approaches zero, causing the non-linear diffusion coefficient of the drug to approach themaximum value, and the effect of β to diminish.
152

0 2 4 6 8 1000.20.40.60.8
1
t
mt
0 0.2 0.4 0.6 0.8 10
0.2
0.4
t
mt
Figure 6.14: The normalised drug concentration released from the swelling polymer versustime for n = 1, δ = 0.1, µ = 0.1, λ = 1, νm = 0.5 and for β = 1 (red solid), 5 (greendashes) and 10 (blue dots). The thin vertical marker indicates the time tf for theseprofiles.
Figure 6.15 shows mt for different values of νm, where Figure 6.15(b) is a magnified versionof Figure 6.15(a). Varying the parameter νm causes a prominent effect on the drug releaserate, which is significantly slowed for νm = 0.9. The reason for this is that a large valueof νm will cause the polymer to swell to a larger extent than a small value of νm, as seenin Figure 6.16. This increase in volume of the polymer means the width of the rubberyregion is larger and the drug in the rubbery region must diffuse out via a longer route.
0 10 20 3000.20.40.60.8
1
t
mt
0 2 4 6 8 1000.20.40.60.8
1
t
mt
Figure 6.15: The normalised drug concentration released from the swelling polymer versustime for n = 1, δ = 0.1, β = 1, µ = 0.1, λ = 1 and for νm = 0.25 (red solid), 0.5 (greendashes) 0.75 (blue dots) and 0.9 (densely magenta dashes).
Lastly the simplified problem of the swelling controlled release system (5.9)–(5.15) (νm =0) is compared with the full problem of the swelling controlled release system (6.10)–(6.17)(0 < νm < 1) on mt, the drug concentration released from the spherical drug carrier inFigure 6.17. The numerically calculated mt for νm = 0.5 (blue dashes) shows differentbehaviour of drug release to the numerically calculated mt for νm = 0 (red solid). Henceincluding the full swelling effect to the model gives a more realistic result of drug releasefrom the swelling controlled release system than the the simplified problem (5.9)–(5.15)studied in Chapter 5.
The observations made of the drug concentration when varying λ, µ and β are the sameas in Section 5.4. The period of drug release for the swelling controlled release systemis extended and the profile of drug release is different if the value of β, λ, µ, or νm
153

are large, although generally the parameter β has a less prominent effect than the otherthree parameters. Based on Figures 6.13(a)–6.15, the swelling controlled release systemmay release the drug in a certain pattern to fit specific applications, if the value of theseparameters is chosen appropriately, and the initial drug loading within the polymericcarrier is deliberately chosen.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 51
1.2
1.4
1.6
1.8
2
2.2
t
s2(t)
Figure 6.16: The position of the volume expansion interface versus time for n = 1, δ = 0.1,β = 1, µ = 0.1, λ = 1 and for νm = 0.25 (red solid), 0.5 (green dashes) 0.75 (blue dots)and 0.9 (densely magenta dashes).
0 1 2 3 4 5 6 7 80
0.2
0.4
0.6
0.8
1
t
mt
Figure 6.17: The normalised drug concentration released from the swelling polymer versustime for n = 1, δ = 0.1, β = 5, µ = 0.1, λ = 1 and for νm = 0 (red solid), and 0.5 (bluedashes).
6.5 Conclusion
The swelling controlled release system investigated in this chapter, (6.10)–(6.17), is amoving boundary problem with two moving boundaries. The model couples together the
154

process of solvent penetration with drug diffusion from a polymeric drug delivery devicewhich is initially in a glassy state but transforms to a rubbery state after contact with thesolvent. The problem (6.10)–(6.17) with β = 0 is treated by Lin and Peng (2005) whichis based on the one dimensional version proposed by Cohen and Erneux (1988b). Theproblem considered here with β > 0 is an extension of the problem treated in Lin andPeng (2005), the difference being that here we employ a nonlinear diffusion coefficient fordrug concentration that increases with solvent concentration.
We present a numerical scheme that is conservative and considerably more accurate thanthat described by Lin and Peng (2005). New asymptotic results are provided for thesmall time limit that explicitly show the unusual scalings that result from including thekinetic boundary condition (6.13) in the model. In particular, the parameter µ > 0 (whichdenotes kinetic undercooling in the corresponding Stefan problem for a melting ice ball)acts to regularise the singular behaviour of the one-phase Stefan problem in the limitt → 0+, leading to more physically meaningful results. From the small time analysis,we conclude that the sorption kinetics of the swelling controlled release system is Case IIdiffusion, because the speed of the two moving fronts are both O(1) as t→ 0+. Further,the flux of solvent at the volume expansion front is also O(1) as t→ 0+, and therefore theswelling controlled release system has an initial constant drug release at small times. Wealso provide a new asymptotic result for the drug concentration with a nonlinear diffusioncoefficient for the large “Stefan number” limit. Additionally, we investigate the effectof the four main parameters on the normalised drug release of the swelling controlledrelease system. The parameters λ and µ are both crucial when determining the locationof the glassy-rubbery interface, and νm is important for determining the location of thevolume expansion interface. If the value of β, λ, µ, or νm is large, the period of drugrelease is extended and the profile of drug release is altered. Hence the swelling controlledrelease system can release drug in a certain pattern or at a certain rate in order to fita variety of applications if the values of these parameters are chosen appropriately anda certain initial drug loading distribution within the polymeric carrier is specified. Alsofrom comparing the model (6.10)–(6.17) with the simplified model (5.9)–(5.15) (νm = 0)studied in Chapter 5, the model (6.10)–(6.17) included the phase change and volumeexpansion, gives more realistic results and the simplified model is only a good modellingapproach for the case of little amount of swelling.
155

Chapter 7
Erosion controlled drug release systems
Bio-degradable polymers, also known as bio-erodible polymers, are important for biomed-ical applications because they have a good bio-compatibility with the human body, andin some cases, to brain tissue. They can also completely disappear from the site, avoidingthe need to remove the device surgically after use. The biomedical devices which comprisethe bio-degradable polymers are particularly suitable for injectable and implantable long-term drug delivery. Polymer erosion is the main process for these pharmaceutical devicesand is a combination of degradation, dissolution, and diffusion processes, as outlined inKipper and Narasimhan (2005).
Generally the polymer erosion starts with a breaking down of the polymer backbone byhydrolysis or some other chemical reaction, to shorten chains, and oligomers, or otherdegradation products that depend on the type of solvent. The polymer constituentsalso break down upon contact with a thermo-compatible solvent. However, the event ofchain scission is just the initiation of the erosion process. After the water penetration,the bio-degradable polymers have less molecular weight, lose their mechanical propertiesand eventually lose mass through dissolution. Then, the polymer gradually degrades andeventually disappears into the surrounding environment via the diffusion of the monomersor other small polymer fragments. Mostly, degradation appears to be the controlling stepof polymer erosion but in some cases all three processes are considered concurrently.
In general there are two types of polymer erosion: bulk erosion and surface erosion, al-though some advanced bio-degradable polymers can exhibit both bulk erosion and surfaceerosion by tailoring the composition of the polymer, however this is beyond the scope ofthe project. Bulk erosion means the polymer undergoes erosion homogeneously becausethe rate of solvent diffusion is much faster than the rate of polymer degradation, so thatthe rate of degradation is roughly the same throughout the entire polymer. On the otherhand, surface erosion is heterogeneous. A polymer undergoing surface erosion is less hy-drophilic than that undergoing bulk erosion, and the rate of degradation is faster thanthe rate of solvent diffusion. Hence, the erosion starts from the surface of the polymerand propagates inwards towards the centre of the polymeric ball, however the solvent onlypenetrates into the exterior of the polymer. In this chapter two models of drug releasefrom the bio-degradable polymers are investigated: bulk erosion and surface erosion. Anumerical analysis is performed on each model to determine the effect of the different
156

parameter values on the drug release. We also present a small time asymptotic analysisof a model undergoing surface erosion to determine the initial behaviour.
7.1 The bulk erosion model
Injectable and implantable drug delivery devices produced by the pharmaceutical industryfor the therapeutic purposes are mostly made of bio-degradable polymers for severalreasons. One is that bio-degradable polymers are not restricted to the type of drug, sothese polymers can deliver either hydrophilic or hydrophobic drug, however the majorreason is to avoid the need of surgical removal after the exhaustion of drug, or fulfillingthe therapeutic purpose. Also, the small polymer fragments produced during the processof erosion are not harmful to the human body, and can be absorbed by human tissue.
One example of an implantable and erodible device is drug delivery to a brain tumour, asdescribed in Siepmann et al. (2006). When the doctor removes the brain tumour or cancercells, the implantable and erodible device is placed at the site of surgery. This is becausethe doctor can not completely remove the tumour or cancer cells without damaging thenormal brain tissue, which would mean the patient may loose their ability to control theirbody, memories or even intelligence. Therefore, the doctor only removes the majority ofthe brain tumour and places the implantable and erodible device in the surgical site sothat the drug will kill the rest of the tumour or cancer cells that still exist around thedevice.
Faisant et al. (2006) proposed an equation for the drug release from a bio-degradable poly-mer which is suitable to treat brain tumours. The drug carrier is made of bio-degradablepolymers (PLGA) and erodes according to bulk erosion after the solvent penetration,roughly maintaining its original volume for a while even after the exhaustion of the drug.Faisant et al. used a diffusion coefficient for the drug which depends on the polymermolecular weight to capture the effect of the bulk erosion in their equation governing thedrug release. This idea is supported by Charlier et al. (2000), Raman et al. (2005), Heet al. (2005) and Lao et al. (2009).
These researchers assume the polymer degradation is dictated by first order kinetics, andthat the polymer molecular weight loss is modelled as
dMp
dt = −kBMp ⇒ Mp = Mpie−kBT ,
where Mpi is the initial polymer molecular weight and KB is the average rate of thepolymer degradation. However Raman et al. (2005) show that upon contact with therelease medium, the polymer degradation does not start right away, and instead modelthe polymer molecular weight loss as
Mp = Mpie−kB(T−Te), (7.1)
where KB is the degradation constant and Te is the activated time of the polymer degrada-tion. These researchers also postulate that the diffusion coefficient of drug increases as the
157

polymer undergoes bulk erosion, and is inversely proportion to the polymer concentrationso that
DV
Dv= Mpi
Mp, (7.2)
where Dv is the diffusion coefficient of drug before polymer degradation and is a constant.This gives the diffusion coefficient of drug calculated from Equations (7.1) and (7.2) as
DV = DvekB(T−Te), (7.3)
at the time when the polymer starts to degrade.
Bio-degradable polymers undergoing bulk erosion have a rate of solvent diffusion that ismuch faster than the rate of polymer degradation, and degrade homogeneously. Here weassume the erosion process takes place after the entire polymer changes from the glassystate into the rubbery state, and propose a model of drug release that is implanted ata therapeutic site and undergoes bulk erosion. This assumption ensures that the entirepolymer matrix will degrade homogeneously at the same rate. The first of two stages ofthe model describes the drug release during the transformation process of the polymerfrom the glassy state into the rubbery state, and is governed by
∂U
∂T= D
R2∂
∂R
(R2∂U
∂R
)in S1(T ) < R < S1(0), (7.4)
U = Ue > U∗ at R = S1(0), (7.5)
D∂U
∂R= − (U +K) dS1
dT at R = S1(T ), (7.6)
dS1dT = −k1 (U − U∗)n at R = S1(T ), (7.7)
and
∂V
∂T= 1R2
∂
∂R
(DV (U)R2∂V
∂R
)in S1(T ) < R < S1(0), (7.8)
V = 0 at R = S1(0), (7.9)
DV (U)∂V∂R
= − (V − Vi)dS1dT at R = S1(T ), (7.10)
where Dd(U) is defined as
DV (U) = Dve−β∗d(1−U/Ue).
Initially the concentration of the drug is the constant, V (R, 0) = Vi and the concentrationof the solvent within the polymer is the zero. The problem (7.4)–(7.10) is the same as(5.1)–(5.7) in Section 5.1.
As the glassy-rubbery interface, S1(T ) reaches the centre of the spherical polymeric ma-trix, the glassy part vanishes and the matrix is now totally in the rubbery state. Now,the erosion process begins and the boundary condition for the drug at the glassy-rubbery
158

interface changes to the zero flux condition due to the symmetry of the problem. Also, theneed for including the solvent concentration in the model is now not necessary because thepolymer degradation is the dominant process which affects the drug release. The secondstage of the model describing the drug release from a polymer undergoing bulk erosion is
∂V
∂T= DV (T )
R2∂
∂R
(R2∂V
∂R
)in 0 < R < S1(0), (7.11)
V = 0 at R = S1(0), (7.12)∂V
∂R= 0 at R = 0, (7.13)
where DV (T ) is defined as
DV (T ) = DvekB(T−Tf ).
The activation time of polymer erosion, Te is replaced by the extinction time of problem(7.4)–(7.10), Tf , in the diffusion coefficient for the drug. The reason for this replacementis due to the lack of references to Te in the literature and the assumption that the erosionprocess takes place after the entire polymer changes from the glassy state to the rubberystate. The non-dimensional version of (7.4)–(7.13) is
∂u
∂t= 1r2
∂
∂r
(r2∂u
∂r
)in s1(t) < r < 1, (7.14)
u = 1 at r = 1, (7.15)∂u
∂r= −(u+ λ)ds1
dt at r = s1(t), (7.16)
un = −µds1dt at r = s1(t), (7.17)
and
∂v
∂t= 1r2
∂
∂r
(δv(u)r2∂v
∂r
)in s1(t) < r < 1, (7.18)
v = 0 at r = 1, (7.19)
δv(u)∂v∂r
= (1− v) ds1dt at r = s1(t), (7.20)
with
∂v
∂t= δv(t)
r2∂
∂r
(r2∂v
∂r
)in 0 < r < s1(0), (7.21)
v = 0 at r = s1(0), (7.22)∂v
∂r= 0 at r = 0, (7.23)
where we have introduced the five dimensionless variables
u = U − U∗
Ue − U∗, v = V
Vi, t = TD
S21(0)
, r = R
S1(0) , and s1(t) = S1(T )S1(0) .
159

Now the initial concentration of the drug is v(r, 0) = 1 and the initial concentration ofthe solvent is still zero. The functions δv(u) and δv(t) are defined to be
δv(u) = δe−β(1−u) and δv(t) = δekb(t−tf ).
Due to the non-dimensionalisation, there are five parameters: δ, β, µ, λ and kb. The firstfour parameters are already defined in Chapter 5, and the last constant kb is
kb = KDS21(0)D
.
This model does not have any exact analytical solutions and so solutions to this modelare obtained numerically. The numerical procedure for solving the first stage of thedimensionless model (7.14)–(7.20) has three steps. The first step is using the “frontfixing” method to transform the moving boundary problem to a fixed boundary problemwith the new independent spatial variable
w = r − s11− s1
.
The second step is to apply the “method of lines” with a finite difference spatial dis-cretisation to uniformly discretise the new fixed boundary problem resulting from thefirst step. The last step is to solve the discretised problem numerically with MATLABbuilt-in ODEs solver, ode15i. Solving the second stage, (7.21)–(7.23), is easier. Weagain apply the ‘method of lines” with a finite difference spatial discretisation to uni-formly discretise the problem and then solve the discretised problem numerically withthe MATLAB built-in ODEs solver, ode15i. In addition, the initial condition for v inthe problem (7.21)–(7.23) is obtained from the solution of (7.14)–(7.20) at the time, theglassy-rubbery interface s1 reaches the centre of the spherical polymeric matrix. Thedetails of this numerical procedure are discussed further in Chapter 5.
7.1.1 Numerical experimentation
The bulk erosion model, (7.14)–(7.23) has the five main parameters λ, µ, β, δ, and kb. Theparameters λ, µ, and β only have an effect on the normalised amount of drug released fromthe device, mt, in the first stage of the model, as in Section 5.1, and the effects of varyingλ, µ, and β are already investigated and discussed in Section 5.4. The parameters λand µ are both crucial for determining the location of the glassy-rubbery interface. Smallvalues of λ and µ will ensure that the glassy region of polymer quickly transforms into therubbery state and the value of the extinction time, tf will be small. This is desired whenconsidering this bulk erosion model, because bulk erosion is the main process affectingthe drug release. The parameter β is a measure of the non-linearity in the dependence ofdrug diffusivity on solvent. The rate of drug release is slowed if the value of β is large.The typical values of λ, µ and β used in the problem (7.14)–(7.20) are 0.8, 0.1 and 20respectively, as in Section 5.4. The typical value of δ is approximately 0.01 which isnow less than the values used in Section 5.4, as the equilibrium value for the diffusion
160

coefficient of drug in bio-degradable polymers is much less than that in swelling polymers.The possible value of kb ranges between 0.1 and 5, as calculated from the studies Charlieret al. (2000), Kiil and Dam-Johansen (2003) and Faisant et al. (2006). Typical results ofthe model (7.14)–(7.23) are presented in Figure 7.1.
t
0 0.2 0.4 0.6 0.8 100.20.40.60.8
1
r
u
(a) Numerically calculated profiles of solvent con-centration. From right to left, profiles are for t =0.0001, 0.001, 0.01, 0.1, 0.27 and 0.3651(dashes).
t
0 0.2 0.4 0.6 0.8 100.20.40.60.8
1
r
v
(b) Numerically calculated profiles of drug concen-tration. From right to left, profiles are for t = 0.07,0.3651(dashes), 1, 2, 2.75, 3.225 and 3.8751.
0 0.1 0.2 0.3 0.400.20.40.60.8
1
t
s1
(c) The time history of the solvent penetrant front.
0 2 4 600.20.40.60.8
1
t
mt
(d) Normalised amount of drug released from thespherical drug carrier versus time.
Figure 7.1: Numerical results of the model (7.14)–(7.23) for λ = 0.8, µ = 0.1, β = 20,δ = 0.01 and kb = 1. The profiles in (a) and (b) are roughly chosen so they are evenlydisplayed in the figure. The thin vertical marker indicates the time tf for the model.
As in Figure 7.1(c) the glassy-rubbery interface reaches the centre of the spherical drugcarrier at time tf = 0.3651. At this time, less than 20% of drug concentration has beenreleased from the drug carrier, indicated by the red vertical line in Figure 7.1(d). Thefirst stage of the model switches to the second stage at time tf = 0.3651, representedby the dashed curves in Figures 7.1(a) and 7.1(b). Therefore the last profile of solventconcentration is a dashed curve in Figure 7.1(a) while the dashed curve in Figure 7.1(b)is the initiation of the bulk erosion of the drug carrier. The drug concentration in thespherical drug carrier completely exhausts before time t = 6 in Figure 7.1(d).
The parameter kb is the rate constant for a polymer undergoing bulk erosion. The effectof varying kb is examined on the normalised amount of drug released from the sphericaldrug carrier. The other constants µ, λ, β and δ are fixed to be 0.8, 0.1, 20 and 0.01respectively. Figures 7.2 and 7.3 plot the normalised amount of drug released from thespherical drug carrier, mt, for different values of kb. The red vertical lines interceptingthe blue coloured curve near time t = 0.4 in both Figures 7.2 and 7.3 are the indication
161

0 1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
t
mt
Figure 7.2: Normalised drug release from a polymeric ball that undergoes bulk erosionversus time for n = 1, λ = 0.8, µ = 0.1, β = 20, δ = 0.01, and kb = 0.8 The thin verticalmarker indicates the time tf for the model.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.80
0.2
0.4
0.6
0.8
1
t
mt
Figure 7.3: Normalised drug release from a polymeric ball that undergoes bulk erosionversus time for n = 1, λ = 0.8, µ = 0.1, β = 20, δ = 0.01, and kb = 5. The thin verticalmarker indicates the time tf for the model.
that the glassy-rubbery interface has reached the centre of spherical drug carrier. Thetotal time taken to completely release the drug from the carrier for kb = 0.8 is t = 6.5165,as in Figure 7.2, however the total time to release the drug from the carrier for kb = 5is t = 1.7146, as seen in Figure 7.3, and we conclude that the total time decreases whenthe value of kb increases. This is because the drug diffusion coefficient is non linear andincreases exponentially as kb increases, indicating an earlier occurrence of complete drugrelease. In other words, the mechanical strength within the polymer is weakened and morediffusion paths in the polymer are created for drug diffusion. Additionally the curve ofthe normalised amount of drug released from the spherical drug carrier appears different,
162

rising steeply, suggesting a faster rate of drug release when kb is increased. The qualitativebehaviour of Figure 7.3 also agrees with the results of Faisant et al. (2006) and Lao et al.(2009).
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.80
0.2
0.4
0.6
0.8
1
t
mt
Figure 7.4: Normalised drug release from a polymeric ball undergoing bulk erosion versustime for n = 1, λ = 0.8, µ = 0.1, β = 20, kb = 5, and for δ = 0.01(blue dashes), andδ = 0.1(red solid). The thin vertical marker indicates the time tf for the profiles.
Figure 7.4 plots the normalised drug release over time for a fixed set of parameter values,except for the control parameter δ, which is chosen as δ = 0.01 and δ = 0.1. At the verybeginning of the drug release process, both curves in Figure 7.4 rise steeply, before therelease rate slows, which depicts an initial burst of drug release. The high release rate atthe beginning of the drug release is due to the drug concentration located on the surfaceof the drug carrier. This burst of drug is more obvious when the diffusion coefficient fordrug concentration is larger. By varying the equilibrium value of the diffusion coefficientthere is a notable effect on the normalised drug release. The drug release rate is higher,and the time taken to completely release all the drug from the carrier is earlier when δ isincreased.
7.2 The surface erosion model
In the pharmaceutical industry, hydrophilic polymers are the major type utilised tofabricate oral controlled drug delivery systems. There are two different types of hy-drophilic polymers used in the pharmaceutical industry; the hydroxypropyl methylcellu-lose (HPMC) and polyethylene oxide (PEO). These polymers are not toxic to the humanbody, can swell significantly, and eventually dissolve upon on contact with thermodynam-ically compatible solvents.
A drug carrier made of hydrophilic polymers is stored in the dry or glassy state when itis not in an aqueous environment. Upon contact with a thermodynamically compatiblesolvent, either polymer disentanglement or polymer chain relaxation occurs due to pene-tration of solvent into the polymer, resulting in an increase in volume of the drug carrier.
163

Simultaneously, a transition from the glassy state to rubbery state at the outermost re-gion of the drug carrier occurs where solvent has penetrated, but the drug in the glassyregion is yet to be dissolved. The drug in the rubbery region is dissolved with enhanceddiffusivity and diffuses out of the drug carrier, which will eventually stop swelling andstart to dissolve when the polymer dissolution overtakes polymer entanglement. The be-haviour of the hydrophilic polymers has been investigated experimentally by Skoug et al.(1993), Colombo et al. (1996) and Maggi et al. (2002).
The mechanisms of drug released from a carrier made from hydrophilic polymers is verycomplex, and couples several process which occur simultaneously. The main processesaffecting the drug release from the carrier are the drug diffusion within the polymer,the swelling of the polymer and the polymer dissolution. Here, we propose a swellingcontrolled drug release system with polymer dissolution. This model exhibits surfaceerosion and is based on Cohen and Erneux (1988b), Siepmann et al. (1999) and Wu et al.(2005). The model is given as
∂U
∂T= D
R2∂
∂R
(R2∂U
∂R
)in S1(T ) < R < S2(T ), (7.24)
U = Ue > U∗ at R = S2(T ), (7.25)
D∂U
∂R= −U dS1
dT at R = S1(T ), (7.26)
dS1dT = −k1 (U − U∗)n at R = S1(T ), (7.27)
and
∂V
∂T= 1R2
∂
∂R
(DV (U)R2∂V
∂R
)in S1(T ) < R < S2(T ), (7.28)
V = 0 at R = S2(T ), (7.29)
DV (U)∂V∂R
= − (V − Vi)dS1dT at R = S1(T ), (7.30)
together with the varied volume result
dS2dT = νmUe
dS2dT + νmD
∂U
∂R
∣∣∣∣R=S2
− 3KS , (7.31)
where KS is the surface-normalised rate constant, and is used to model polymer dis-solution. Initially the concentration of the drug is the constant, V (R, 0) = Vi and theconcentration of the solvent within the polymer is the zero. The non-linear diffusioncoefficient DV (U) in (7.28) and (7.30) is defined as
DV (U) = Dve−β∗d
(1− U
Ue
).
The variable S2(T ) is the radius of the drug carrier and shall henceforth be referred to asthe erosion front, rather than the volume expansion interface in Section 6.1. The problem(7.24)–(7.31) is almost the same as (6.1)–(6.8) in Section 6.1, except for (7.31), whichdescribes the speed of the drug carrier radius.
164

Equations (7.24)–(7.31) are non-dimensionalised by the dimensionless variables
u = U − U∗
Ue − U∗, v = V
Vi, t = TD
S22(0)
, r = R
S2(0) , s1(t) = S1(T )S2(0) , and s2(t) = S2(T )
S2(0) ,
to give the non-dimensional model
∂u
∂t= 1r2
∂
∂r
(r2∂u
∂r
)in s1(t) < r < s2(t), (7.32)
u = 1 at r = s2(t), (7.33)∂u
∂r= −(u+ λ)ds1
dt at r = s1(t), (7.34)
un = −µds1dt at r = s1(t), (7.35)
and
∂v
∂t= 1r2
∂
∂r
(δv(u)r2∂v
∂r
)in s1(t) < r < s2(t), (7.36)
v = 0 at r = s2(t), (7.37)
δv(u)∂v∂r
= (1− v) ds1dt at r = s1(t), (7.38)
with
ds2dt = νm
ds2dt + νm
1 + λ
∂u
∂r
∣∣∣∣r=s2− 3ks, (7.39)
where δv(u) is defined to be δv(u) = δe−β(1−u). Now the initial concentration of the drugis v(r, 0) = 1 and the initial concentration of the solvent is still zero. Due to the non-dimensionalisation, the six constants δ, β, µ, λ νm and ks are introduced. The first fiveparameters have already been defined in Chapter 6, but the last one is new and definedas
ks = KSS1(0)D
.
As the glassy-rubbery interface reaches the centre of spherical drug carrier, the boundarycondition of the drug and solvent concentration at the solvent penetrant front are bothswitched to zero flux conditions, due to the symmetry of the carrier. The model describingthe solvent permeation is no longer a two moving boundary problem, but rather a singlemoving boundary problem, given below in dimensionless coordinates as
∂u
∂t= ∂2u
∂r2 + 2r
∂u
∂rin 0 < r < s2(t), (7.40)
u = 1 at r = s2(t), (7.41)∂u
∂r= 0 at r = 0, (7.42)
165

and
∂v
∂t= 1r2
∂
∂r
(δv(u)r2∂v
∂r
)in 0 < r < s2(t), (7.43)
v = 0 at r = s2(t), (7.44)∂v
∂r= 0 at r = 0, (7.45)
with
ds2dt = νm
ds2dt + νm
1 + λ
∂u
∂r
∣∣∣∣r=s2− 3ks. (7.46)
This model does not have any known exact solutions so we seek solutions numerically.The numerical procedure of solving the first stage of the dimensionless model (7.32)–(7.39)has three steps. The first step is to apply the following “front fixing” transformation, totransform the moving boundary problem to a fixed boundary problem,
w = r − s1s2 − s1
.
The second step is to apply the “method of lines”, which uniformly discretises the fixedboundary problem resulted from the first step and then employs finite difference spatialapproximations. The last step is solving this discretised problem numerically with theMATLAB built-in ODEs solver, ode15i. The numerical procedure of solving the secondstage of the dimensionless model (7.40)–(7.46) is the same as that for solving the firststage, except the independent spatial variable is now
χ = r
s2,
which transforms the problem into a fixed boundary problem. In addition, the initialsolution of v in problem (7.40)–(7.46) is obtained as the solution to (7.32)–(7.39) at thetime at which the glassy-rubbery interface reaches the centre of the spherical drug carrier.Further details of the numerical procedure are discussed in Chapter 6.
7.2.1 Asymptotic analysis
Small-time behaviour
A small-time investigation of (7.32)–(7.39) reveals the behaviour of the swelling controlleddrug release system with polymer dissolution as the drug is first released. This small-time analysis will indicate whether the model possesses the two main features of Case IIdiffusion or not. The following expansion,
v ∼ 1r
{v0(w) + v1(w)(1− s1) + v2(w)(1− s1)2 + · · ·
},
u ∼ 1r
{u0(w) + u1(w)(1− s1) + u2(w)(1− s1)2 + · · ·
},
ds1dt ∼ g0 + g1(1− s1) + g2(1− s1)2 + · · · ,
s2 ∼ 1 + h1(1− s1) + h2(1− s1)2 + · · · , as s1 → 1,
166

are substituted into (7.32)–(7.39), to solve for the unknowns
v0(w), v1(w), v2(w), · · · , u0(w), u1(w), u2(w), · · · ,
g0, g1, g2, · · · , and h1, h2, · · · .
The results for the leading order terms, the first correction terms and the second correctionterms are
v0 = 0,
v1 = 1 + h1δµ
(1− w),
v2 = −12
[β(1 + λ)(1 + h1)2
δµ2 + h1(1 + h1)2
δ2µ2
](1− w2)+
δµh2 − δµ(1 + h1)− [1 + δµ+ δn(1 + λ)] (1 + h1)2
δ2µ2 (1− w)+
β(1 + λ)(1 + h1)2
δµ2 (1− w),
u0 = 1,
u1 = h1 − (1 + h1)(
1 + 1 + λ
µ
)(1− w),
u2 = (1 + λ)h1(1 + h1)2
2µ2 (1− w2) + (1 + λ)(1 + h1)µ
(1− w)+
(1 + λ) [1 + µ+ n(1 + λ)] (1 + h1)2
µ2 (1− w)− h2
(1 + 1 + λ
µ
)(1− w) + h2,
g0 = −1µ,
g1 = n(1 + λ)(1 + h1)µ2 ,
g2 = n(1 + λ)h2µ2 − n(1 + λ) [1 + 2µ+ (3n− 1)(1 + λ)] (1 + h1)2
2µ3 −
n(1 + λ)(1 + h1)3
2µ3 ,
h1 = νm1− νm
− 3µks1− νm
, and
h2 = −νm [1 + 2µ(1− νm)]2µ(1− νm)3 + 9µ {(1− νm) [1 + n(1 + λ)]− 1} k2
s
2(1− νm)3 +{6− 3 [n(1 + λ) + 2− 2µ] (1− νm)− 6µ(1− νm)2} ks
2(1− νm)3 ,
by using the method described in Section 3.3. This gives s1 in terms of t to be
s1(t) ∼1 + g0t−12g0g1t
2 + 16(g0g
21 + 2g2
0g2)t3 as t→ 0+,
which may be used to determine v, u and s2 in terms of t.
167

The small time behaviour of problem (7.32)–(7.39) is
v(r, t) ∼ 1δµ
(1− rr
)[1 + h1(1− r)
2δµ + β(1 + λ)(1− r)2µ
]+{
(1 + λ)h1(1 + h1)(1− r)− (1 + λ)h2(1− r)2}βtδµ3(1 + h1)r +{
δµh1(1 + h1) +[(1− δµ)(1 + h1)− (2 + δµ+ δn+ δnλ)(1 + h1)2] (1− r)
}t
δ2µ3(1 + h1)r −
h1h2(1− r)2t
δ2µ3(1 + h1)r + · · · (7.47)
u(r, t) ∼1− 1 + λ
µ
(1− rr
)− (1 + λ)h1
2µ2
((1− r)2
r
)+
1 + λ
µ3h1h2
(1 + h1)
((1− r)2
r
)t− (1 + λ)h1
µ2rt− (1 + λ)(1− µ)
µ3
(1− rr
)t+
(1 + λ)[2 + µ+ n(1 + λ)](1 + h1)µ3
(1− rr
)t+ · · · (7.48)
s1(t) ∼1− t
µ+ n(1 + λ)(1 + h1)
2µ3 t2 + n(1 + λ)h23µ4 t3−
n(1 + λ)[4n(1 + λ)− λ+ 2µ](1 + h1)2
6µ5 t3 − n(1 + λ)(1 + h1)3
6µ5 t3 + · · ·
(7.49)
and
s2(t) ∼ 1 + h1µt−
[n(1 + λ)h1(1 + h1)
2µ3 − h2µ2
]t2 + · · · , (7.50)
as t → 0. At small times, the speed of two moving fronts are both O(1), as well as theflux of solvent at the erosion front, hence the model possesses the two main features ofCase II diffusion. The parameter ks begins to affect the drug and solvent concentrationat O(1) through the term h1. For the glassy-rubbery interface s1, and the erosion fronts2, the effect of the parameter ks appear at O(t2) and O(t) respectively, again throughh1. The small time behaviour of the normalised drug release for the swelling controlleddrug release system with polymer dissolution is calculated to be
mt =− 3δ∫ t
0s2
2∂v
∂r
∣∣∣∣r=s2
dt
∼3tµ− 3[2δµ+ nδ(1 + λ)(1 + h1) + (1 + h1)2]
2δµ3 t2 as→ 0+, (7.51)
which does not contain the parameter β up to O(t2), but contains the parameter ks inthe O(t2) term through h1. Further, the mt of the model is O(t) as t → 0+, implying aconstant rate of drug release at early times, which is often desirable in the pharmaceuticalindustry.
Figure 7.5 compares numerical results of the problem (7.32)–(7.39) to the small timeasymptotic results. The small time asymptotic results for the glassy-rubbery interface(7.49) and the erosion front (7.50) both diverge from the numerical solutions when time
168

is just before 0.001, but the small time result for the normalised drug release (7.51) onlyfollows the numerical solution for approximately ten times less. This is because the smalltime result for the glassy-rubbery interface is O(t3), whereas the small time result fordrug concentration used to calculate the normalised drug release is only O(t). The O(t2)term in the normalised drug release is contributed by the erosion front, and an integrationwith respect to t. Therefore, the small time result for the normalised drug release (7.51)is not as accurate as that for the glassy-rubbery interface (7.49).
0 0.001 0.002 0.003
0.98
0.99
1
t
s1
(a) Glassy-rubbery interface versus time
0 0.0005 0.001 0.0015 0.0020.85
0.9
0.95
1
1.05
t
s2
(b) Erosion front versus time
0 0.0001 0.0002 0.0003 0.0004 0.0005
−4
−2
0
·10−2
t
mt
(c) Normalised drug release versus time
Figure 7.5: The comparison of numerical results (blue solid) of the problem (7.32)–(7.39)with small time asymptotic results (red dashes) for n = 1, λ = 0.8, µ = 0.1, β = 5.55,δ = 0.1, νm = 0.77, and ks = 0.01.
7.2.2 Numerical experimentation
There are six parameters in the swelling controlled drug release system with polymerdissolution model (7.32)–(7.39). This model is almost the same as (6.10)–(6.17) in Section6.1 and we have discussed effect of λ, µ, and β on the normalised drug release in theswelling controlled drug release system already in Section 6.4, and the results are relevanthere. The parameters λ and µ are both crucial when determining the location of theglassy-rubbery interface, and the measure of the non-linearity in the dependence of drugdiffusivity on solvent, β, as well as λ and µ, slow the rate of drug release and modify thedrug release profile when large values are chosen. The rate of drug release is increased,and the time taken to completely release the drug from the carrier is lower when thevalue of δ is large. The typical value of λ, µ, β, δ, and νm used in the model are 0.8,
169

0.1, 5.55, 0.1 and 0.77 respectively. The physically realistic value of ks ranges between10−3 and 10−1, and is calculated from studies Narasimhan and Peppas (1997a), Siepmannet al. (1999), Siepmann et al. (1999), and Wu et al. (2005) for two different polymers: thehydroxypropyl methylcellulose (HPMC) and polyethylene oxide (PEO), under differenttypes of solvent.
0 0.2 0.40
0.2
0.4
0.6
0.8
1
t
s1
(a) Glassy-rubbery interface versus time
0 10 20
0.8
1
1.2
1.4
1.6
t
s2
(b) Erosion front versus time
t
t = 0.01
t = 0.001
0 0.5 1 1.50
0.2
0.4
0.6
0.8
1
r
u
(c) Profiles of the solvent concentration for timest = 0.001, 0.01, 0.1, 0.3, 0.4594(blue dots), 0.5194,0.7594 and 1.4594.
tt = 0.01
t = 0.9594
0 0.5 1 1.50
0.2
0.4
0.6
0.8
1
r
v
(d) Profiles of the drug concentration for timest = 0.01(red), 0.4594(blue dots), 0.9594(red),1.6194(black), 2.1994(black dashes), 3.0994(blackdashes) and 4.6594(black dashes).
0 5 10 15 200
0.2
0.4
0.6
0.8
1
t
mt
(e) Normalised amount of drug released from a polymeric ballthat undergoes surface erosion versus time.
Figure 7.6: Numerical results of the problem (7.32)–(7.39) for n = 1, λ = 0.8, µ = 0.1,β = 5.55, δ = 0.1, νm = 0.77, and ks = 0.01.
Representative numerical results of the swelling controlled drug release system with poly-mer dissolution are presented in Figures 7.6 and 7.7, using typical values of the parameters.The glassy-rubbery interface reaches the centre of the polymeric ball at tf = 0.4594. Atthis time, the erosion front reaches 1.5270, and the polymer ball has swollen to 3.56 times
170

its initial volume. The profiles of solvent and drug concentration at tf = 0.4594 are indi-cated by the blue dotted curves in Figures 7.6(c) and 7.6(d). The erosion front reaches amaximum radius of 1.584 at approximately time t = 1 and starts to diminish afterwards.The effect of the increasing and decreasing the erosion front is also seen in Figure 7.7,where the position of v = 0 is different in each profile. As expected, the position of v = 0also reaches a maximum position (red solid curve at t = 0.9594), before diminishing after-wards (black dashed curves). This is because the effect of the polymer erosion overcomesthe effects of swelling when time is greater than approximately one, and due to the solventpenetration saturating the polymeric ball. Therefore the swelling effects can not compen-sate for the effect of the polymer erosion after the polymeric ball is saturated with thesolvent, and the erosion front has reached the equilibrium value at approximately t = 1.The parameter ks then increases the rate of drug release by reducing the physical volumeof the carrier via surface erosion, and the normalised drug release seen in Figure 7.6(e)reaches 100% at approximately time t = 10, which is earlier than the case with ks = 0.A comparison of the normalised drug release for swelling controlled drug release systemswith polymer dissolution and without polymer dissolution is presented in Figure 7.8.
t
t = 0.01
t = 0.9594
1 1.1 1.2 1.3 1.4 1.5 1.60
0.1
0.2
0.3
0.4
r
v
Figure 7.7: Numerically calculated drug profiles for n = 1, λ = 0.8, µ = 0.1, β = 5.55,δ = 0.1, νm = 0.77, and ks = 0.01 at times t = 0.01(red solid), 0.4594(blue dots),0.9594(red solid), 1.6194(black dashes), 2.1994(black dashes), 3.0994(black dashes) and4.6594(black dashes).
One particular aim of designing controlled release systems is the need to vary the rateof drug release to suit a specific therapeutic treatment. The effects of νm and ks on theposition of the erosion front in time and the normalised amount of drug released from aspherical drug carrier for a swelling controlled release system with polymer erosion arenow investigated. The erosion front reaches its maximum position at approximately thesame time when the value of ks is increased from 0.001 to 0.01, seen in Figure 7.9(a). Theblue curve stops at approximately t = 22 because the drug in the carrier is completelyexhausted. However increasing the parameter ks further has the effect of decreasingthe position of the erosion front. When the value of ks is increased, the time at which
171

0 2 4 6 8 10 12 14 16 18 200
0.2
0.4
0.6
0.8
1
t
mt
Figure 7.8: The normalised drug release from a polymeric ball versus time of the problem(7.32)–(7.39) for n = 1, λ = 0.8, µ = 0.1, β = 5.55, δ = 0.1, νm = 0.77 and for ks = 0(reddashes) and ks = 0.01 (blue solid).
the amount of drug in the carrier is completely exhausted is reduced, but not to theextent of the case of the erosion front, because ks directly affects the speed of the erosionfront through Equation (7.39) and indirectly affects the drug release. Also the drugconcentration at the detached part of the polymeric carrier is generally much less thanthe rest so that the drug release rate does not increase very much in this case. If thehigher value of ks is used, the drug release rate will increase due to higher decreasing rateof the erosion front which incurs more drug concentration released from the detached partof the polymeric carrier.
0 10 20 30 40
1
1.5
t
s2
(a) Erosion front, s2 versus time
0 5 10 15 200
0.2
0.4
0.6
0.8
1
t
mt
(b) Normalised amount of drug released from a poly-meric ball undergoing surface erosion versus time.
Figure 7.9: Numerical results of the problem (7.36)–(7.39) for n = 1, λ = 0.8, µ = 0.1,β = 5.55, δ = 0.1, νm = 0.77 and for ks = 0.001(red dashes) and ks = 0.01(blue solid).
Figure 7.10 shows that the parameter νm clearly raises the maximum position of theerosion front, before shrinking the speed. It also extends the time taken to completelyexhaust the drug in the carrier as the value of νm is increased. This is because thepolymeric carrier swells more, which compensates for the rate of surface erosion and
172

extends the route of drug diffusion in the rubbery part of the polymeric carrier. Theselonger routes cause the drug to diffuse out of the polymeric carrier slower.
0 10 20 30 401
1.2
1.4
1.6
t
s2
(a) Erosion front, s2 versus time
0 5 10 15 200
0.2
0.4
0.6
0.8
1
t
mt
(b) Normalised amount of drug released from a poly-meric ball undergoing surface erosion versus time.
Figure 7.10: Numerical results of the problem (7.32)–(7.39) for n = 1, λ = 0.8, µ = 0.1,β = 5.55, δ = 0.1, ks = 0.001 and for νm = 0.2(blue solid) and νm = 0.77(red dashes).
7.3 Conclusion
In general, erosion controlled drug release systems are classified as either a bulk erosionmodel, or a surface erosion model, due to the mechanisms of the polymer erosion. Abulk erosion model (7.14)–(7.23) and a surface erosion model (7.32)–(7.39) have beeninvestigated in this chapter. Both models couple the process of solvent penetration anddrug diffusion together in a polymeric drug delivery device which is initially in a glassystate but transforms to a rubbery state after contact with the solvent. In the bulk erosionmodel, the erosion process is initiated after the entire polymer changes from the glassystate to the rubbery state, with the polymer erosion incorporated through a non-lineardiffusion coefficient for drug concentration. This non-linear diffusion coefficient is anexponential function that depends on time and a degradation constant, kb. This idea wasfirst proposed by Charlier et al. (2000), but also used by Raman et al. (2005), He et al.(2005), Faisant et al. (2006), and Lao et al. (2009). The rate of drug release for this bulkerosion model is increased and the profile of drug release is altered if the value of kb isincreased.
The surface erosion model is also known as the swelling controlled drug release systemwith polymer dissolution because it possesses both the swelling and erosion behaviourof the polymer. The swelling controlled drug release system with polymer dissolutionaddresses the polymer erosion through the speed of the erosion front and is an extensionof the problem (6.10)–(6.17) described in Section 6.1. From the asymptotic analysis,we observe the sorption kinetics are Case II diffusion, because the speed of two movingfronts are both O(1) and the flux of solvent at the erosion front is also O(1) as t → 0+.Therefore, the swelling controlled release system with polymer dissolution has an initialconstant drug release at small times. The parameter ks is used to model the polymerdissolution and begins to affect the drug and solvent concentration in the O(1) termas t → 0+, whereas it firstly appears in the O(t) and O(t2) for the erosion front and
173

the glassy-rubbery interface respectively. From the numerical analysis, increasing theparameter ks reduces the time of complete drug exhausting in the carrier, increases thedrug release rate, and also decreases the volume of the polymeric carrier.
Both models exhibit both single and binomial drug release when varying the correspondingerosion parameter and the equilibrium drug diffusion coefficient in each model. Thebehaviour of the two different kinds of drug release in the swelling controlled drug releasesystem with polymer dissolution is not seen in the studies Siepmann et al. (1999) or Wuet al. (2005). The reason is that these proposed models do not consider the transformationof the polymer from the glassy state to the rubbery state, and hence with our erosioncontrolled release system, it is possible to release the drug in a certain pattern or at acertain rate in order to fit specific applications. In addition these two erosion models maybe used as either the inner or outer layer of the multi-layered controlled release system toachieve complicated profiles of drug release.
174

Chapter 8
Discussion
Main moving boundary problem (Chap. 5)
Solventpenetration
Drug
diffusion
Stefan problemwith kinetic undercooling
Stefan problem
with kinetic undercoolingand surface tension
Multi-layereddrug release system
Swelling-controlleddrug release system
Surface
erosion
Surface
erosion
Bulk
erosion
Two movingboundaryproblem
.
Figure 8.1: The flow diagram of the project.
Controlled drug delivery has received an growing interest in modern pharmacotherapy fortwo main purposes. One is releasing the drug concentration that follows the predeterminedrelease behaviour such as the zero-order release and the other one is sustaining the drugrelease for a extended period. The second purpose of the controlled drug delivery isparticularly important to the orally delivered drug because patients would only need totake the drug once per day if one dose can sustain twenty-four hours. The mathematicalmodels are useful to predict the drug release profile from controlled drug delivery devicesand can enormously simplify the task of developing new drug delivery devices by reducingthe number of required experiments either in vitro or in vivo.
The layout of this research is showed in Figure 8.1. In this research, we investigated drugrelease models and melting problems (Stefan type problems). In drug release models,we explored four mathematical models of the controlled drug delivery that selectivelyinvolve the solvent penetration into the polymeric device, the swelling of the polymer, thepolymer erosion and the drug diffusion out of the device. Each model considers differentscenarios of drug diffusion from a spherical polymeric drug delivery device but has two
175

common key features. The first feature is that the solvent penetration into the polymerwhich causes the transition of the polymer from a glassy state to a rubbery state. Theinterface between the two states of the polymer is modelled as a moving boundary andthe speed of this interface is governed by a kinetic law. The width of the rubbery regionchanges as the glassy-rubbery interface propagates into the polymer and the rubberypolymer may swell or even dissolve into the surrounding solvent. The second feature isthat drug diffusion only happens in the rubbery region of the polymer, with a nonlineardiffusion coefficient which depends on the concentration of solvent. The mathematicalmodels described these characteristics are categorised as the moving boundary problems.We firstly investigated the swelling controlled release system, ignoring the volume changeof polymer in Chapter 5 and subsequently investigated the swelling controlled releasesystem(with volume change) in Chapter 6. We then investigated the erosion controlledrelease systems for the bulk erosion and the surface erosion in Chapter 7.
The mathematical model (5.9)–(5.15) in Chapter 5 describes the solvent penetration anddrug diffusion in the rubbery part of the polymeric ball, couples the two processes togetherand ignores the volume expansion due to the swelling polymer. The model (5.9)–(5.15)was solved numerically by method of lines with finite difference method and investigatedasymptotically for small time behaviour and large Stefan number. In the small time anal-ysis, we found the rate of solvent penetration, the speed of the glassy-rubbery interface,and the rate of drug release depend on the undercooling parameter µ in the leading orderterm and they behave as ∂u/∂r(1, t) = O(1), ds1/dt = O(1), and mt = O(t) as t→ 0+ re-spectively. Hence the sorption kinetics of the model is the Case II diffusion which inducesconstant rate of drug release at the beginning of drug delivery process. We then comparedthe model with the linear initial boundary value problem for drug diffusion in a sphericalpolymer, (2.5)–(2.8) which does not consider the interaction between solvent and poly-mer. The analytic solution of mt for this simple linear problem is O(t1/2) as t→ 0+ whichis different to the small time limit of the problem (5.9)–(5.15). From comparing thesetwo problems numerically on the normalised drug release, mt, the linear initial boundaryvalue problem is a good approximation of the moving boundary problem (5.9)–(5.15) inparameter regimes that parameters λ and µ are kept small and parameter β is zero. Thereason is that the glassy-rubbery interface moves so quickly that the moving boundaryproblem only exists for a short amount of time and the problem turns into the linearinitial boundary value problem for the subsequent time while most drug concentration isstill not released. On the other hand, we had shown that for other parameter regimes,the linear initial boundary value problem is certainly not a good choice. Additionallythe Dirichlet boundary condition for drug concentration was used at the glassy-rubberyinterface and we noted that the resultant normalised drug release is only conservative ifthe value of drug concentration at the glassy-rubbery interface is chosen appropriately.Finally a two-layered model was investigated in Chapter 5 for its impact on the drugrelease.
In Chapter 6, the volume expansion property of the swelling controlled release system isincluded into the model which changes the moving boundary problem with one moving
176

boundary to the one with two moving boundaries. This moving boundary problem (6.10)–(6.17) with β = 0 was treated by Lin and Peng (2005) and is based on a one dimensionalversion proposed by Cohen and Erneux (1988b). The difference between these two prob-lems is the nonlinear diffusion coefficient of drug diffusion that increases with solvent con-centration. We presented a numerical scheme that is conservative and more accurate thanthe method described by Lin and Peng (2005). We also provided new asymptotic resultsfor the small time limit that explicitly show the unusual scalings resulted from includingthe kinetic boundary condition (6.13) in the model. From the small time asymptoticanalysis, we observed the sorption kinetics of the swelling controlled release system is theCase II diffusion again because the speed of two moving fronts are both O(1) and theflux of solvent at the volume expansion front is also O(1) as t→ 0+. Hence the swellingcontrolled release system, (6.10)–(6.17) has an initial constant drug release as t → 0+.Lastly we explored the effect of main parameters on the normalised drug release mt of theswelling controlled release system. These parameter are the Stefan number λ, the kineticundercooling parameter µ, the non-linear diffusion coefficient index β, and the volumeexpansion parameter νm. The period of drug release for the swelling controlled releasesystem is extended and the profile of drug release is significantly altered if the value of β,λ, µ, and νm are large. Especially we found that the parameter νm is more effective thanother parameters to prolong the release of drug from the polymeric drug delivery device.The reason is that this parameter directly affects the degree of the swelling polymer. Alsofrom comparing the model with the special case (νm = 0) which is the model studied inChapter 5, the model (6.10)–(6.17) included the phase change and volume expansion,gives more realistic results and the simplified model (5.9)–(5.15) is only a good modellingapproach for the case of little amount of swelling.
After two chapters of investigating the swelling controlled release systems, we turnedthe focus to the erosion controlled release systems. In general erosion controlled releasesystems are classified into the bulk erosion model and the surface erosion model due tothe mechanisms of the polymer erosion. A bulk erosion model (7.14)–(7.23) and a surfaceerosion model (7.32)–(7.39) were investigated in Chapter 7. In this bulk erosion model,the erosion process initiates after the entire polymer changes from the glassy state to therubbery state and the model addresses the polymer erosion through a non-linear diffusioncoefficient of drug. This non-linear diffusion coefficient of drug is an exponential functionthat depends on time and the degradation constant, kb. The rate of drug release forthis bulk erosion model is increased and the profile of drug release behaves differently ifthe value of kb is increased. The surface erosion model (7.32)–(7.39) is also called theswelling controlled release system with polymer dissolution because it possesses both theswelling and erosion behaviour of the polymer. This surface erosion model addresses thepolymer erosion through the speed of the erosion front and is an extension of the problem(6.10)–(6.17) described in Section 6.1. From the asymptotic analysis, we again observedthe sorption kinetics of the model (7.32)–(7.39) is the Case II diffusion because the speedof two moving fronts are both O(1) and the flux of solvent at the erosion front is alsoO(1) as t → 0+. Hence the swelling controlled release system with polymer dissolution
177

has an initial constant drug release as t → 0+. The parameter ks is used to model thepolymer dissolution in this surface erosion model and begins to affect the drug and solventconcentration in the O(1) term as t → 0+. This parameter only starts to have effect onthe erosion front s2 and the glassy-rubbery interface s1 in the O(t) and the O(t2) termsrespectively. From the numerical analysis, the parameter ks reduces the time of completelyexhausting drug concentration in the carrier, increases the drug release rate, and alsodecreases the volume of the polymeric carrier greatly if the value of ks is increased. Bothmodels exhibit binomial drug release when varying the corresponding erosion parameterand the equilibrium drug diffusion coefficient in each model. The behaviour of the twodifferent kinds of drug release in the swelling controlled drug release system with polymerdissolution is not seen in the studies Siepmann et al. (1999) and Wu et al. (2005). Thereason is that these proposed models do not consider the transformation of the polymerfrom the glassy state to the rubbery state, and hence with our erosion controlled releasesystem, it is possible to release the drug in a certain pattern or at a certain rate in orderto fit specific or complex applications
To conclude, the present study is a preliminary research on the modelling of drug releasefrom polymeric carriers. The present findings contribute to the field’s understanding ofusing the moving boundary problem on the drug release modelling. Our analytical findingsof these mathematical models are consistent with the empirical observations documentedin Astarita and Sarti (1978), hence our models should achieve better outcome whenthey are used to approximate the experimental results. The numerical investigation ofthese models indicates that these models have the ability to tailor drug release patternsor drug release rates in order to fit a variety of applications by varying the values ofparameters and initial drug loading distribution within the polymeric carrier. Anotherreason for using the moving boundary problem on the drug release modelling is that asimple and conservative numerical method was presented in this research to solve this typeof problems. These drug release models only involve drug and solvent concentrations inthe polymeric carriers during the modelling and do not consider the effect of the polymerconcentration on the drug release. The reason of adopting this approach is to simplify themodelling from the various drug release applications and leads to the limited applicabilityof these models. For the purpose of developing a general mathematical model of drugrelease, the polymer concentration should be considered during the modelling for widerapplicability in future research. Also in the future, models investigated in this study willbe required to compare with the experimental results in order to show reliability of modeland possible improvement than published models that use linear diffusion equation.
Besides the application of the controlled drug delivery, the solvent permeation in theswelling controlled release system, ignoring the volume change of polymer is a movingboundary problem which can also use to model the one-phase Stefan problem with kineticundercooling for melting an ice ball. In the past, the melting problem of a homogeneouslyfrozen ball involving phase change has been modelled as the classical one-phase Stefanproblem. This classical one-phase Stefan problem has already been studied extensivelyby mathematicians and it has been reported that an unrealistic singularity existed in the
178

problem at the complete melting time. This unrealistic singularity appears in the temper-ature gradient at the moving solid-melt boundary and the speed of the moving solid-meltboundary as the time approaches the complete melting time t → t−f . Mathematicianshave tried to regularise this unrealistic singularity by adding the surface tension to theclassical one-phase Stefan problem through a Gibbs-Thomson condition however this at-tempt actually makes the singularity worse. Hence we investigated the effect of includingthe kinetic undercooling to the melting problem and this modified problem is called theone-phase Stefan problem with kinetic undercooling. The one-phase Stefan problem withkinetic undercooling is a moving boundary problem and differs from the classical one-phase Stefan problem at the boundary conditions of the moving solid-melt boundary. Wefound out the addition of kinetic undercooling (µ > 0) regularises the unphysical speedof the moving solid-melt boundary and temperature gradient at the moving solid-meltboundary in the classical one-phase Stefan problem as t → t−f . We also discovered theaddition of kinetic undercooling (µ > 0) reduces the initial speed of the moving solid-meltboundary which agrees with small time asymptotic analysis. From investigating the smalltime behaviour, the speed of the moving solid-melt boundary ds/dt is finite and O(1) ast → 0+ which is different to the classical one-phase Stefan problem (ds/dt → −∞).Hence we observed the transition to a completely different qualitative behaviour in thesmall time analysis as the important kinetic parameter vanishes and found out the effectof including the kinetic undercooling at the solid-melt boundary regularises the classi-cal one-phase Stefan problem in the small time limit. We also investigated the problemasymptotically in the large Stefan number limit for three time scales by matched asymp-totics and found out the temperature solution in the last time scale is not uniformly valideverywhere (r → 0). Therefore another small time scale is needed in future research forthe solid-melt boundary approaching zero to fully approximate the problem in the largeStefan number limit.
When melting very small particles, it is known that surface tension effects are important.Therefore we extended the study to include the surface tension and numerically com-pared this problem with the one-phase problem of melting a spherical particle treatedby Wu et al. (2009) (µ = 0) which only considers the surface tension effects (no kineticundercooling). The numerical results suggest that the addition of kinetic undercoolingindeed regularises the singularity introduced by the Gibbs–Thomson at the beginning ofthe melting process, prevents the solution from blowing up at t = tc, and ensures thatthe solution continues to exist until complete melting (t = tf ). However, we found thateven with µ > 0, the speed of the interface still becomes unbounded (ds/dt → −∞ ast → t−f instead of t → t−c ). From the preliminary asymptotic analysis we noted that theasymptotic result (4.12) only holds for µ > 0 and σ > 0, but breaks down in either ofthe limits µ → 0 or σ → 0 and we did not have the behaviour of temperature u in thelimit t → t−f . Hence it would be interesting to determine such behaviour using formalasymptotics and investigate these delicate limits in future research. The conclusion is thatboth surface tension and kinetic undercooling are required to describe complete melting.
179

These outcomes give a better understanding of melting a particle which contributes tothe current body of knowledge related to conduction-limited melting and freezing.
8.1 Future work
In this research, we investigated drug release models and melting problems (Stefan typeproblems). We firstly investigated the one-phase Stefan problem with kinetic undercool-ing numerically and asymptotically in two different limits. From the current asymptoticanalysis which has three time scales, we realised another very small time scale near theextinction time is needed for the solid-melt boundary approaching zero to fully approx-imate the problem in the large Stefan number limit. Also we intend to investigate theproblem asymptotically in the small Stefan number limit which is originated from somereal world cases in the drug release models. This asymptotic analysis for the the smallStefan number limit should be applicable to the two moving boundaries problem in thedrug release models. We then studied the melting problem that includes surface tensionand kinetic undercooling. We plain to analyse this extended problem aysmptotically byusing a Baiocchi-type transformation.
In drug release models, we explored four mathematical models of the controlled drugdelivery that selectively involve the solvent penetration into the polymeric device, theswelling of the polymer, the polymer erosion and the drug diffusion out of the device.At the moment, these four drug release models are one-dimensional model. The nextstage of the research is the extension from the one-dimensional model (sphere) to thetwo-dimensional model (cylinder). The reasons of this proposed extension are that mostcommercial medicines are produced as tablets (thin cylinder) and experimental data fromthe literature are generated from thin cylinders. Hence numerical results generated froma two-dimensional model will have a more realistic comparison to the experimental datafrom the literature. The comparison between numerical results and experimental data willalso indicate the better modelling approach between the one employed moving boundaryproblem and the one used linear diffusion equation in the literature. The other branchof extending current models is including the polymer concentration as one of dependentvariables into the model. This extension aims to consider different chemical reactionsbetween the polymer and solvent from the current four models (the effect of environmentalconditions on the drug carriers). Eventually we intend to develop a general mathematicalmodel of drug release that is capable to describe different scenarios of drug release.
180

Appendix A
Parameter estimation
There are total of five dimensionless parameters used in Chapter 5 and 6 and they areformed due to the scaling of dimensional problem. These parameters are defined eitherin Chapter 5 or 6. The typical value or range of values of these parameters can only befound and calculated through experimental results published by experimental chemists orpharmaceutic researchers.
The parameter δ is the ratio of the diffusivity of drug to the diffusivity of solvent withinthe polymer. The values of diffusivity for drug and solvent can be found in pairs fromthe experiments in Narasimhan and Peppas (1997a), Siepmann et al. (1999), Radu et al.(2002), Kiil and Dam-Johansen (2003) and Wu et al. (2005). These researchers usedifferent drugs, solvents and polymers in their experiments. The average value of δ isapproximately the order of 0.1 from these five papers.
The parameter β is defined in Section 5.1 and is the exponential index of the non-lineardiffusion coefficient for drug. The value of β is calculated from Narasimhan and Peppas(1997a), Siepmann et al. (1999), Siepmann and Peppas (2000), Siepmann et al. (2000),Radu et al. (2002), Kiil and Dam-Johansen (2003) and Wu et al. (2005) and rangesbetween 0 and 20.
The parameter λ is defined in Section 6.1 and is the ratio of the thermodynamic thresholdvalue of solvent to the difference between the the equilibrium value of solvent and thethermodynamic threshold value of solvent in the polymer. The equilibrium value of solventand the thermodynamic threshold value of solvent in the polymer are documented togetherin Narasimhan and Peppas (1997a) and Kiil and Dam-Johansen (2003). The value of λapproximately ranges between 0.05 and 0.8 from these two papers.
The parameter µ is defined in Section 5.1 and is the characteristic number in the contextof the moving boundary problem with kinetic undercooling. The value of µ is calculatedfrom Astarita and Sarti (1978), Narasimhan and Peppas (1997a), Siepmann et al. (1999)and Kiil and Dam-Johansen (2003) and approximately ranges between the order of 0.1and the order of 1 from these papers.
The parameter ν is the product of the molar volume of solvent and the the equilibriumvalue of solvent in the polymer. The equilibrium value of solvent in the polymer isobtained from Siepmann et al. (1999). The value of ν is approximate 0.76 for the case ofwater penetrating into the HPMC.
181

The parameter kb is defined in Section 7.1 and is the degradation constant in the non-linear drug diffusivity for bulk erosion. The value of kb is obtained from He et al. (2005)and Lao et al. (2009).
The parameter ks is defined in Section 7.2 and is the surface-normalised rate constant forsurface erosion. The value of kb is calculated from Siepmann et al. (1999) and Wu et al.(2005).
182

Appendix B
Small time calculations
dsdt ∼ g0 + g1(1− s) + g2(1− s)2 + g3(1− s)3 + · · · , as s→ 1,
Let z = 1− sdzdt ∼ −g0 − g1z − g2z
2 − g3z3 + · · ·
∼ −g0
(1 + g1
g0z + g2
g0z2 + g3
g0z3 + · · ·
)[1 +
(1 + g1
g0z + g2
g0z2 + g3
g0z3 + · · ·
)]−1dz ∼ −g0dt
1−(g1g0z + g2
g0z2 + g3
g0z3 + · · ·
)+ 2
2
(g1g0z + g2
g0z2 + g3
g0z3 + · · ·
)2−
66
(g1g0z + g2
g0z2 + g3
g0z3 + · · ·
)3+ · · · dz ∼ −g0dt
1− g1g0z − g2
g0z2 − g3
g0z3 + · · ·+
(g1g0
)2z2 + 2 g1g2
(g0)2 z3 + · · · −(
g1g0
)3z3 − · · ·dz ∼ −g0dt∫
1− g1g0z +
[(g1g0
)2− g2g0
]z2 −
[(g1g0
)3− 2 g1g2
(g0)2 + g3g0
]z3 + · · · dz ∼
∫−g0dt
z − 12g1g0z2 + 1
3
[(g1g0
)2− g2g0
]z3 − 1
4
[(g1g0
)3− 2 g1g2
(g0)2 + g3g0
]z4 + · · · ∼ −g0t
Let z ∼ −g0t+ at2 + bt3 + ct4 + · · ·
z2 ∼ g20t
2 − 2g0at3 + (−2g0b+ a2)t4 + · · ·
z3 ∼ −g30t
3 + 3g20at
4 + · · ·
z4 ∼ g40t
4 + · · ·
− g0t+ at2 + bt3 + ct4 + · · · − 12g1g0
[g2
0t2 − 2g0at
3 + (−2g0b+ a2)t4 + · · ·]
+
13
[(g1g0
)2− g2g0
] (−g3
0t3 + 3g2
0at4 + · · ·
)−
14
[(g1g0
)3− 2 g1g2
(g0)2 + g3g0
] (g4
0t4 + · · ·
)+ · · · ∼ −g0t,
a = 12g0g1, b = −1
6 g0(g21 + 2g0g2), c = 1
24g0(g31 + 8g0g1g2 + 6g2
0g3)
183

z(t) ∼ −g0t+ 12g0g1t
2 − 16g0(g2
1 + 2g0g2)t3 + 124g0(g3
1 + 8g0g1g2 + 6g20g3)t4 + · · ·
s(t) = 1− z(t)
∼ 1 + g0t−12g0g1t
2 + 16g0(g2
1 + 2g0g2)t3 − 124g0(g3
1 + 8g0g1g2 + 6g20g3)t4 + · · ·
us(w, s) ∼ 1−(
1 + 1 + λ
µ
)(1− w)(1− s)+
1 + λ
µ2 [1 + 2µ+ n(1 + λ)] (1− w)(1− s)2 · · ·
us(r, s) ∼ 1−(
1 + 1 + λ
µ
) 1− r1− s(1− s)+
1 + λ
µ2 [1 + 2µ+ n(1 + λ)] 1− r1− s1
(1− s)2 · · ·
∼ 1−(
1 + 1 + λ
µ
)(1− r) + 1 + λ
µ2 [1 + 2µ+ n(1 + λ)] (1− r)(1− s) · · ·
u(r, t) =us(r, s(t))
r
∼ 1r−(
1 + 1 + λ
µ
)(1− rr
)+ 1 + λ
µ2 [1 + 2µ+ n(1 + λ)](1− r
r
)(1− s) · · ·
∼ 1−(1 + λ
µ
)(1− rr
)+
1 + λ
µ2 [1 + 2µ+ n(1 + λ)](1− r
r
)(1− 1 + t
µ− · · ·
)+ · · ·
∼ 1−(1 + λ
µ
)(1− rr
)+ 1 + λ
µ3 [1 + 2µ+ n(1 + λ)](1− r
r
)t+ · · ·
184

vs(w, s1) ∼ 1δµ
(1− w)(1− s1)−
1(δµ)2 [1 + δn(1 + λ) + 2δµ− βδ(1 + λ)] (1− w)(1− s1)2−
β
2δµ2 (1 + λ)(1− w2)(1− s1)2 + · · ·
vs(r, s1) ∼ 1δµ
1− r1− s1
(1− s1)−
1(δµ)2 [1 + δn(1 + λ) + 2δµ− βδ(1 + λ)] 1− r
1− s1(1− s1)2−
β
2δµ2 (1 + λ) [1− r2 − 2(1− r)s1](1− s1)2 (1− s1)2 + · · ·
∼ 1δµ
(1− r)− β
2δµ2 (1 + λ)(1− r2)−
1(δµ)2 [1 + δn(1 + λ) + 2δµ− βδ(1 + λ)] (1− r)(1− s1)+
β
δµ2 (1 + λ)(1− r)s1 + · · ·
v(r, t) = vs(r, s1(t))r
∼ 1δµ
(1− rr
)− β
2δµ2 (1 + λ)(
1− r2
r
)−
1(δµ)2 [1 + δn(1 + λ) + 2δµ− βδ(1 + λ)]
(1− rr
)(1− 1 + t
µ− · · ·
)+
β
δµ2 (1 + λ)(1− r
r
)(1− t
µ+ · · ·
)+ · · ·
∼ 1δµ
(1− rr
)+ β
2δµ2 (1 + λ)(
(1− r)2
r
)−
1δ2µ3 [1 + δn(1 + λ) + 2δµ]
(1− rr
)t+ · · ·
185

References
Abdekhodaie, M. J. and Y.-L. Cheng (1996). Diffusional release of a dispersed solute from aspherical polymer matrix. Journal of Membrane Science 115, 171 – 178. 4
Abdekhodaie, M. J. and Y.-L. Cheng (1997). Diffusional release of a dispersed solute from planarand spherical matrices into finite external volume. Journal of Controlled Release 43, 175 – 182.4
Alfrey, T., E. F. Gurnee, and W. G. Lloyd (1966). Diffusion in glassy polymers. Journal ofPolymer Science: Part C 12, 249 – 261. 101
Arifin, D. Y., L. Y. Lee, and C. H. Wang (2006). Mathematical modeling and simulation of drugrelease from microspheres: Implications to drug delivery systems. Advanced Drug DeliveryReviews 58, 1274 – 1325. 2, 3, 5, 30
Astarita, G. and G. C. Sarti (1978). A class of mathematical models for sorption of swellingsolvents in glassy polymers. Polymer Engineering and Science 18, 388 – 395. 18, 20, 23, 36, 37,79, 101, 127, 129, 178, 181
Brochard, F. and P. G. de Gennes (1983). Kinetics of polymer dissolution. PhysicoChemicalHydrodynamics 4, 313 – 322. 8
Buffat, P. H. and J. P. Borel (1976). Size effect on the melting temperature of gold particles.Physical Review A 13, 2287 – 2298. 80
Burkersroda, F. V., L. Schedl, and A. Göpferich (2002). Why degradable polymers undergo surfaceerosion or bulk erosion. Biomaterials 23, 4221 – 4231. 9
Carslaw, H. S. and J. C. Jaeger (1986). Conduction of heat in solids (2nd edition ed.). OxfordUniversity Press. 14
Charlier, A., B. Leclerc, and G. Couarraze (2000). Release of mifepristone from biodegradable ma-trices: experimental and theoretical evaluations. International Journal of Pharmaceutics 200,115 – 120. 35, 36, 157, 161, 173
Cohen, D. S. and T. Erneux (1988a). Free boundary problems in controlled release pharmaceuti-cals. I: Diffusion in glassy polymers. SIAM Journal on Applied Mathematics 48, 1451 – 1465.11, 20, 22, 25, 26, 36, 41, 58, 89
Cohen, D. S. and T. Erneux (1988b). Free boundary problems in controlled release pharmaceu-ticals. II: Swelling-controlled release. SIAM Journal on Applied Mathematics 48, 1466 – 1474.15, 23, 26, 29, 30, 33, 36, 58, 91, 126, 127, 129, 155, 164, 177
Cohen, D. S. and T. Erneux (1998). Controlled drug release asymptotics. SIAM Journal onApplied Mathematics 58, 1193 – 1204. 16
Colombo, P., R. Bettini, and N. A. Peppas (1999). Observation of swelling process and diffusionfront position during swelling in hydroxypropyl methyl cellulose (hpmc) matrices containing asoluble drug. Journal of Controlled Release 61, 83 – 91. 37
Colombo, P., R. Bettini, P. Santi, A. D. Ascentiis, and N. A. Peppas (1996). Analysis of theswelling and release mechanisms from drug delivery systems with emphasis on drug solubilityand water transport. Journal of Controlled Release 39, 231 – 237. 164
Crank, J. (1980). The Mathematics of Diffusion (2nd edition ed.). Oxford University Press. 14Crank, J. (1987). Free and Moving Boundary Problems. Oxford University Press. 20, 86Davis, G. B. and J. M. Hill (1982). A moving boundary problem for the sphere. IMA Journal of
Applied Mathematics 29, 99 – 111. 40de Grenes, P. G. (1971). Reptation of a polymer chain in the presence of fixed obstacles. The
Journal of Chemical Physics 55, 572 – 579. 7, 8Devotta, I., V. D. Ambeskar, A. B. Mandhare, and R. A. Mashelkar (1994). The life time of a
dissolving polymeric particle. Chemical Engineering Science 49, 645 – 654. 7, 31, 32, 36Devotta, I., M. V. Badiger, P. R. Rajamohanan, S. Ganapathy, and R. A. Mashelkar (1995). Un-
usual retardation and enhancement in polymer dissolution: Role of disentanglement dynamics.Chemical Engineering Science 50, 2557 – 2569. 7
186

Evans, J. D. and J. R. King (2000). Asymptotic results for the Stefan problem with kinetic under-cooling. The Quarterly Journal of Mechanics and Applied Mathematics 53, 449 – 473. 40, 41,58
Faisant, N., J. Akiki, F. Siepmann, J. P. Benoit, and J. Siepmann (2006). Effects of the typeof release medium on drug release from plga-based microparticles: Experiment and theory.International Journal of Pharmaceutics 314, 198 – 197. 35, 157, 161, 163, 173
Fasano, A., G. H. Meyer, and M. Primicerio (1986). On a problem in the polymer industry:Theoretical and numerical investigation of swelling. SIAM Journal on Mathematical Analysis 17,945 – 960. 20
Friedman, A. and F. Reitich (1991). The stefan problem with small surface tension. Transactionsof the American Mathematical Society 328, 465 – 515. 80
Frisch, H. L. (1978). Simultaneous nonlinear diffusion of a solvent and organic penetrant in apolymer. Journal of Polymer Science: Polymer Physics Edition 16, 1651 – 1664. 91
Fujita, H. (1961a). Diffusion in polymer-diluent systems. Algebra Universalis 3, 1 – 47. 7Fujita, H. (1961b). Fortschritte Der Hochpolymeren-Forschung Volume 3, Chapter Diffusion in
polymer-diluent systems, pp. 1 – 47. Springer Berlin / Heidelberg. 91Good, W. R. (1976). Diffusion of water soluble drugs from initially dry hydrogels. In R. J.
Kostelnik (Ed.), Polymeric Delivery Systems, pp. 139 – 156. Gordon and Breach. 17Grassi, M., L. Zema, M. E. Sangalli, A. Maroni, F. Giordano, and A. Gazzaniga (2004). Modeling
of drug release from partially coated matrices made of a high viscosity HPMC. InternationalJournal of Pharmaceutics 276, 107 – 114. 10
Han, X. and J. Pan (2009). A model for simultaneous crystallisation and biodegradation ofbiodegradable polymers. Biomaterials 30, 423 – 430. 35
Harland, R. S., A. Gazzaniga, M. E. Sangani, P. Colombo, and N. A. Peppas (1988). Drug/polymermatrix swelling and dissolution. Pharmaceutical Research 5, 488 – 494. 7
He, J., C. Zhong, and J. Mi (2005). Modeling of drug release from bioerodible polymer matrices.Drug Delivery 12, 251 – 259. 37, 157, 173, 182
Herman, M. F. and S. F. Edwards (1990). A reptation model for polymer dissolution. Macro-molecules 23, 3662 – 3671. 8
Herrero, M. A. and J. J. L. Velazquez (1997). On the melting of ice balls. SIAM Journal onMathematical Analysis 28, 1 – 32. 40
Higuchi, T. (1961). Rate of release of medicaments from ointment bases containing drugs insuspension. Journal of Pharmaceutical Sciences 50, 874 – 875. 4, 23, 104
Higuchi, T. (1963). Mechanism of sustained-action medication: Theoretical analysis of rate ofrelease of solid drugs dispersed in solid matrices. Journal of Pharmaceutical Sciences 52, 1145– 1149. 4, 15, 23, 127
Hill, J. M. and A. Kucera (1983). The time to complete reaction or solidification of a sphere.Chemical Engineering Science 38, 1360 – 1362. 40
Hopfenberg, H. B. (1978). The effect of film thickness and sample history on the parametersdescribing transport in glassy polymers. Journal of Membrane Science 3, 215 – 230. 30
Hu, B. (1991). Diffusion of penetrant in a polymer: A free boundary problem. SIAM Journal onMathematical Analysis 22, 934 – 956. 25
Illingworth, T. C. and I. O. Golosnoy (2005). Numerical solutions of diffusion-controlled movingboundary problems which conserve solute. Journal of Computational Physics 209, 207 – 225.43
Ju, R. T. C., P. R. Nixon, and M. V. Pate (1995). Drug release from hydrophilic matrices. 1. Newscaling laws for predicting polymer and drug release based on the polymer disentanglementconcentration and the diffusion layer. Journal of Pharmaceutical Sciences 84, 1455 – 1463. 8
Ju, R. T. C., P. R. Nixon, M. V. Pate, and D. M. Tong (1995). Drug release from hydrophilicmatrices. 2. A mathematical model based on the polymer disentanglement concentration andthe diffusion layer. Journal of Pharmaceutical Sciences 84, 1464 – 1477. 7
Kiil, S. and K. Dam-Johansen (2003). Controlled drug delivery from swellable hydroxypropyl-methylcellulose matrices: Model-based analysis of observed radial front movements. Journal ofControlled Release 90, 1 – 21. 37, 161, 181
Kipper, M. J. and B. Narasimhan (2005). Molecular description of erosion phenomena inbiodegradable polymers. Macromolecules 38, 1989 – 1999. 156
187

Korsmeyer, R. W., S. R. Lustig, and N. A. Peppas (1986). Solute and penetrant diffusion inswellable polymers. I. Mathematical modeling. Journal of Polymer Science: Polymer PhysicsEdition 24, 395 – 408. 29, 36
Korsmeyer, R. W. and N. A. Peppas (1983). Macromolecular and modeling aspects of swelling-controlled systems, in Controlled release delivery systems. Marcel Dekker. 20
Langer, J. S. (1980). Instabilities and pattern formation in crystal growth. Reviews of ModernPhysics 52, 1 – 28. 40, 80
Langer, J. S. (1987). Lectures in the theory of pattern formation. In J. Souletie, J. Vannimenus,and R. Stora (Eds.), Chance and matter, pp. 629 – 711. Elsevier Science Publishers B.V. 40, 83
Lao, L. L., S. S. Venkatraman, and N. A. Peppas (2009). A novel model and experimentalanalysis of hydrophilic and hydrophobic agent release from biodegradable polymers. Journal ofBiomedical Materials Research Part A 90, 1054 – 1065. 37, 157, 163, 173, 182
Lee, H.-R. and Y.-D. Lee (1991). Mathematical models and experiments for swelling phenomenabefore dissolution of a polymer film. Chemical Engineering Science 46, 1771 – 1779. 8
Lee, P. I. (1980). Diffusional release of a solute from a polymeric matrix Ů approximate analyticalsolutions. Journal of Membrane Science 7, 255 – 275. 4
Lee, P. I. and N. A. Peppas (1987). Prediction of polymer dissolution in swellable controlled-releasesystems. Journal of Controlled Release 6, 207 – 215. 8, 30, 36, 129
Leong, K. W. and R. Langer (1987). Polymeric controlled drug delivery. Advanced Drug DeliveryReviews 1, 199 – 233. 2
Lin, C. C. and A. T. Metters (2006). Hydrogels in controlled release formulations: Network designand mathematical modeling. Advanced Drug Delivery Reviews 58, 1379 – 1408. 2, 5, 30
Lin, J.-S., C.-C. Hwang, C.-M. Lin, and J.-Y. Lai (2001). Solvent transport in spherical polymer-penetrant systems. Chemical Engineering Science 56, 151 – 156. 26, 41
Lin, J.-S. and Y.-L. Peng (2005). Swelling controlled release of drug in spherical polymer-penetrantsystems. International Journal of Heat and Mass Transfer 48, 1186 – 1194. 26, 58, 79, 89, 99,100, 101, 126, 127, 128, 129, 139, 140, 155, 177
Lowman, A. M. and N. A. Peppas (1999). Solute transport analysis in ph-responsive, complexinghydrogels of poly(methacrylic acid-g-ethylene glycol). Journal of Biomaterials Science, PolymerEdition 10, 999 – 1009. 3
Lyu, S., R. Sparer, and D. Unterker (2005). Analytical solutions to mathematical models ofthe surface and bulk erosion of solid polymers. Journal of Polymer Science Part B: PolymerPhysics 43, 383 – 397. 35
Maggi, L., L. Segale, M. Torre, E. Machiste, and U. Conte (2002). Dissolution behaviour ofhydrophilic matrix tablets containing two different polyethylene oxides (peos) for the controlledrelease of a water-soluble drug. dimensionality study. Biomaterials 23, 1113 – 1119. 164
Masaro, L. and X. X. Zhu (1999). Physical models of diffusion for polymer solutions, gels andsolids. Progress in Polymer Science 24, 731 – 775. 101
McCue, S. W., B. Wu, and J. M. Hill (2008). Classical two-phase Stefan problem for spheres.Proceedings of the Royal Society A: Mathematical, Physical & Engineering Sciences 464, 2055– 2076. 40
McCue, S. W., B. Wu, and J. M. Hill (2009). Micro/nanoparticle melting with spherical symmetryand surface tension. IMA Journal of Applied Mathematics 74, 439 – 457. 85
Meyer, G. H. (1977). One-dimensional parabolic free boundary problems. SIAM Review 19, 17 –34. 20
Morton, K. W. (1996). Numerical solution of convection-diffusion problems. Chapman & Hall. 46Narasimhan, B. (2001). Mathematical models describing polymer dissolution: Consequences for
drug delivery. Advanced Drug Delivery Reviews 48, 195 – 210. 5Narasimhan, B. and N. A. Peppas (1996a). Disentanglement and reptation during dissolution of
rubbery polymers. Journal of Polymer Science: Part B: Polymer Physics 34, 947 – 961. 8, 32,36
Narasimhan, B. and N. A. Peppas (1996b). On the importance of chain reptation in models ofdissolution of glassy polymers. Macromolecules 29, 3283 – 3291. 8, 9
Narasimhan, B. and N. A. Peppas (1997a). Molecular analysis of drug delivery systems controlledby dissolution of the polymer carrier. Journal of Pharmaceutical Sciences 86, 297 – 304. 7, 9,32, 36, 37, 118, 149, 170, 181
Narasimhan, B. and N. A. Peppas (1997b). The physics of polymer dissolution: Modeling ap-proaches and experimental behavior. Advances in Polymer Science 128, 157 – 207. 5
188

Papadokostaki, K. G., A. Stavropoulou, M. Sanopoulou, and J. H. Petropoulos (2008). An ad-vanced model for composite planar three-layer matrix-controlled release devices part I. Devicesof uniform material properties and non-uniform solute load. Journal of Membrane Science 312,193 – 206. 10
Papanu, J. S., D. W. Hess, D. S. Soane, and A. T. Bell (1989). Dissolution of thin poly(methylmethacrylate) films in ketones, binary ketone/alcohol mixtures, and hydroxy ketones. Journalof The Electrochemical Society 136, 3077 – 3083. 8
Papanu, J. S., D. S. Soane(Soong), A. T. Bell, and D. W. Hess (1989). Transport models forswelling and dissolution of thin polymer films. Journal of Applied Polymer Science 38, 859 –885. 8
Paul, D. R. and S. K. McSpadden (1976). Diffusional release of a solute from a polymer matrix.Journal of Membrane Science 1, 33 – 48. 4
Pedroso, R. I. and G. A. Domoto (1973a). Inward spherical solidification-solution by the methodof strained coordinates. International Journal of Heat and Mass Transfer 16, 1037 – 1043. 40
Pedroso, R. I. and G. A. Domoto (1973b). Perturbation solutions for spherical solidification ofsaturated liquids. Journal of Heat Transfer 95, 42 – 46. 40
Peppas, N. A., R. Gurny, E. Doelker, and P. Buri (1980). Modelling of drug diffusion throughswellable polymeric systems. Journal of Membrane Science 7, 241 – 253. 23, 28, 29, 36, 127
Peppas, N. A., J. C. Wu, and E. D. V. Meerwall (1994). Mathematical modeling and experimentalcharacterization of polymer dissolution. Macromolecules 27, 5626 – 5638. 8
Prabhu, S. and S. Hossainy (2007). Modeling of degradation and drug release from a biodegradablestent coating. Journal of Biomedical Materials Research Part A. 80A, 732 – 741. 35
Radu, F. A., M. Bause, P. Knabner, G. W. Lee, and W. C. Friess (2002). Modeling of drug releasefrom collagen matrices. Journal of Pharmaceutical Sciences 91, 964 – 972. 37, 118, 132, 181
Raman, C., C. Berkland, K. Kim, and D. W. Pack (2005). Modeling small-molecule release fromplg microspheres: effects of polymer degradation and nonuniform drug distribution. Journal ofControlled Release 103, 149 – 158. 157, 173
Riley, D. S., F. T. Smith, and G. Poots (1974). The inward solidification of spheres and circularcylinders. International Journal of Heat and Mass Transfer 17, 1507 – 1516. 40, 41, 58, 63, 65,66, 67, 72, 79
Rothstein, S. N., W. J. Federspiel, and S. R. Little (2009). A unified mathematical model for theprediction of controlled release from surface and bulk eroding polymer matrices. Biomateri-als 30, 1657 – 1664. 35
Siepmann, J. and A. Goĺpferich (2001). Mathematical modeling of bioerodible, polymeric drugdelivery systems. Advanced Drug Delivery Reviews 48, 229 – 247. 30
Siepmann, J., H. Kranz, R. Bodmeier, and N. A. Peppas (1999). HPMC-matrices for controlleddrug delivery: A new model combining diffusion, swelling, and dissolution mechanisms andpredicting the release kinetics. Pharmaceutical Research 16, 1748 – 1756. 7, 34, 35, 164, 170,174, 178
Siepmann, J., H. Kranz, N. A. Peppas, and R. Bodmeier (2000). Calculation of the required sizeand shape of hydroxypropyl methylcellulose matrices to achieve desired drug release profiles.International Journal of Pharmaceutics 201, 151 – 164. 37, 181
Siepmann, J. and N. A. Peppas (2000). Hydrophilic matrices for controlled drug delivery: Animproved mathematical model to predict the resulting drug release kinetics (the ‘sequentiallaye’ model). Pharmaceutical Research 17, 1290 – 1298. 7, 35, 37, 91, 129, 181
Siepmann, J. and N. A. Peppas (2001). Modeling of drug release from delivery systems based onhydroxypropyl methylcellulose (HPMC). Advanced Drug Delivery Reviews 48, 139 – 157. 5
Siepmann, J., K. Podual, M. Sriwongjanya, N. A. Peppas, and R. Bodmeier (1999). A new modeldescribing the swelling and drug release kinetics from hydroxypropyl methyl cellulose tablets.Journal of Pharmaceutical Sciences 88, 65 – 72. 7, 29, 36, 37, 91, 129, 149, 170, 181, 182
Siepmann, J., F. Siepmann, and A. T. Florence (2006). Local controlled drug delivery to the brain:Mathematical modeling of the underlying mass transport mechanisms. International Journalof Pharmaceutics 314, 101 – 119. 157
Skoug, J. W., M. V. Mikelsons, C. N. Vigneron, and N. L. Stemm. (1993). Qualitative evaluationof the mechanism of release of matrix sustained release dosage forms by measurement of polymerrelease. Journal of Controlled Release 27, 227 – 245. 164
Soward, A. M. (1980). A unified approach to Stefan’s problem for spheres and cylinders. Proceed-ings of the Royal Society of London. Series A 373, 131 – 147. 40, 41, 58, 67, 72, 79
189

Stewartson, K. and R. T. Waechter (1976). On Stefan’s problem for spheres. Proceedings of theRoyal Society of London. Series A 348, 415 – 426. 40, 41, 58, 67, 72
Takigawa, T., H. Kasihara, and T. Masuda (1990). Swelling and mechanical properties of polyviny-lalcohol hydrogels. Polymer Bulletin 24, 613 – 618. 34
Tu, Y.-O. (1977). A multi-phase stefan problem describing the swelling and the dissolution ofglassy polymer. Quarterly of Applied Mathematics 35, 269 – 285. 5, 7
Tu, Y.-O. and A. C. Ouano (1977). Model for the kinematics of polymer dissolution. IBM Journalof Research and Development 21, 131 – 142. 5, 7
Vuik, C. (1993). The solution of a one-dimensional Stefan problem. Centrum voor Wiskunde enInformatica. 20
Wronski, C. R. M. (1967). The size dependence of the melting point of small particles of tin.British Journal of Applied Physics 18, 1731 – 1737. 80
Wu, B., S. W. McCue, P. Tillmana, and J. M. Hill (2009). Single phase limit for melting nanopar-ticles. Applied Mathematical Modelling 33, 2349 – 2367. 80, 81, 83, 85, 86, 88, 179
Wu, J. C. and N. A. Peppas (1993). Modeling of penetrant diffusion in glassy polymers with anintegral sorption deborah number. Journal of Polymer Science: Part B: Polymer Physics 31,1503 – 1518. 8
Wu, N., L.-S. Wang, D. C.-W. Tan, S. M. Moochhala, and Y.-Y. Yang (2005). Mathematical mod-eling and in vitro study of controlled drug release via a highly swellable and dissoluble polymermatrix: polyethylene oxide with high molecular weights. Journal of Controlled Release 102,569 – 581. 2, 7, 35, 36, 37, 91, 129, 149, 164, 170, 174, 178, 181, 182
Wu, T., H. C. Liaw, and Y. Z. Chen (2002). Thermal effect of surface tension on the inwardsolidification of spheres. International Journal of Heat and Mass Transfer 45, 2055 – 2065. 80
Zhou, Y. and X. Y. Wu (2002). Theoretical analyses of dispersed-drug release from planar matriceswith a boundary layer in a finite medium. Journal of Controlled Release 84, 1 – 13. 4
Zhou, Y. and X. Y. Wu (2003). Modeling and analysis of dispersed-drug release into a finitemedium from sphere ensembles with a boundary layer. Journal of Controlled Release 90, 23 –26. 4
190