Embed Size (px)
Citation preview

ARTICLE IN PRESS
0098-3004/$ - se
doi:10.1016/j.ca
�Correspondfax: +3949 82
E-mail addr
Computers & Geosciences 33 (2007) 476–496
www.elsevier.com/locate/cageo
Mathematical modeling of tidal hydrodynamics in shallowlagoons: A review of open issues and applications
to the Venice lagoon
L. D’Alpaos, A. Defina�
Dipartimento di Ingegneria Idraulica, Marittima, Ambientale e Geotecnica—Universita di Padova, 35121 Padova, Italy
Received 13 December 2005; received in revised form 29 June 2006; accepted 12 July 2006
Abstract
Although considerable progress has been made in the application of two- and three-dimensional shallow water models to
simulate flow in estuaries and coastal lagoons, a number of outstanding problems still remain in this branch of
computational fluid dynamics.
These problems mainly deal with the proper representation of physical processes and arise when dealing with very
shallow flow, temporary submergence and time-dependent flow domains, and complex morphology, and are often related
to inaccuracies in modeling the geometry of the domain. Among others, wetting and drying of salt marshes and tidal flats,
inclusion of the small scale drainage networks which often strongly affect hydrodynamics, turbulence closure schemes, and
accurate friction evaluation are discussed in this paper.
To better illustrate these problems and their possible solutions some examples are presented which use the Venice lagoon
as a benchmark shallow tidal basin characterized by a complex interplay of channels and marshes.
r 2006 Elsevier Ltd. All rights reserved.
Keywords: Mathematical modeling; Tidal hydrodynamics; Shallow lagoons
1. Introduction
Current developments of two-dimensional shal-low water models and the availability of refinednumerical techniques and of powerful and accessiblecomputers offer increased opportunities to simu-late tidal flow in estuaries and coastal basins.Available numerical techniques to solve the shallowwater equations are now consolidated. However, anumber of issues related to physical processes
e front matter r 2006 Elsevier Ltd. All rights reserved
geo.2006.07.009
ing author. Tel.: +39 49 82 75 427;
75 446.
ess: [email protected] (A. Defina).
representation are still open or, rather, unsatisfac-torily closed and require further theoretical andexperimental study.
In dealing with flow in shallow tidal lagoons onehas often to cope with very small water depths andwith flooding and drying of marshes and tidal flats.In this case the accuracy in the evaluation of bothmass balance and flow resistance is essential if phaseshifts and amplitudes of the tide propagating insidethe lagoon are to be accurately predicted. In therecent past the problem has received considerableattention (Braschi et al., 1994; Balzano, 1998; Jiet al., 2001; Oey, 2005). However, most of theproposed algorithms have been developed to tackle
.

ARTICLE IN PRESSL. D’Alpaos, A. Defina / Computers & Geosciences 33 (2007) 476–496 477
numerical instabilities arising in moving boundaryhydrodynamics problems with minor or no atten-tion to the physical processes actually involved.
In the presence of rapidly varying topography(e.g., transition from tidal channels to tidal flats ormarshes), which do not conform with the graduallyvarying topography assumed in deriving the two–dimensional shallow flow equations, some seriousmodeling problems arise which involve convectiveaccelerations and horizontal shear stresses. Impor-tantly, the latter are also affected by the chosenturbulence model. Considerable progress has beenmade in the development of turbulence closureschemes; however, their application in two-dimen-sional shallow-water models at the geophysical scalehave never been properly assessed and a number ofturbulence-related problems, discussed in this pa-per, remain unanswered.
It is also worthwhile to stress that differentproblems, and as a consequence, different modelingapproaches and simplifications can be adoptedwhen simulating flow over morphologically differ-ent areas (i.e., marshes, shallows, and tidal channelsof different sizes). Clearly, the choice also dependson the required accuracy. For example, modelingproblems affecting the inner part of a tidal basin,related to rapidly varying topography and complexmorphology, generally differs from problems re-lated to the hydrodynamic modeling of lagoon inletsand the main channels departing from them. As aconsequence, accurate solutions for the formernumerical problems do not easily match withoptimal solutions for the latter problems. Thismatching is indeed a further modeling problem.To better specify the above statements, it is worthrecalling that in strongly dissipative and morpholo-gically complex systems, such as the Venice lagoon,convective accelerations and horizontal Reynoldsstresses play a minor role compared to gravity andbed shear stresses. Moreover, an accurate descrip-tion of these terms requires a very accurateresolution of the velocity field, which is a hard taskwhen the domain is large and the numericaldiscretization is comparably rough. Therefore, theinclusion of these terms in the model may lead toinaccuracies which can be far greater than those onehas when these terms are neglected. Indeed, it can beshown that effects produced by convective accelera-tion can be treated, from a large scale point of view,as an additional energy dissipation produced bysmall scale, i.e., not resolved by the model,momentum mixing and can be accounted for by
adjusting the friction coefficient (Defina, 2000b;D’Alpaos and Defina, 1993; D’Alpaos et al., 1995;Umgiesser et al., 2004). However, when simulatingtidal flow through the inlets and along the mainchannels the above simplification is quite crude. Inmost cases it is not acceptable and the inclusion ofconvective acceleration and Reynolds stress in themodel is strictly required.
Adequate solutions to the above problems cannotbe just given by adopting accurate and well-structured numerical schemes, or else extremelyrefined computational grids. An important effortshould instead be addressed toward modeling therelevant physical phenomena, which are neglectedor drastically filtered by the numerical solution.This can be accomplished through the constructionof suitable subgrid models, i.e. by setting up aphenomenological representation of the overallprocesses which ensures a statistically equivalentdescription of the actual physics.
In the present contribution we review and discussthe main modeling problems which arise whendealing with very shallow flows and morphologi-cally complex bottom topography. Possible solu-tions based on subgrid modeling approach areproposed. To better illustrate the problems andtheir possible solutions some examples are presentedwhich use the Venice lagoon as typical irregular andshallow tidal basin.
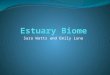
The lagoon of Venice is a wide shallow basincrossed by a network of deep channels departingfrom three inlets, namely Lido, Malamocco andChioggia (Fig. 1). The lagoon is also characterizedby the presence of small islands and wide saltmarshes and tidal flats. Salt marshes exhibit adendritic structure of channels of varying sizes.These channels perform a drainage function, oftencontinuing to flow long after the tide has recededand the marshes are exposed.
These morphologic units play different roles inaffecting tidal propagation within the lagoon, butall have comparable importance. Quite differentbehavior characterizes the flow over the marshes,along the channels, and over the tidal flats. There-fore, different assumptions are required to accountfor the local morphology and hydrodynamics inorder to maximize the accuracy and minimize thecomputational effort.
The paper is organized as follows. Section 2discusses the wetting and drying problem in shallowflows over irregular topography. Section 3 providesthe description of a 1D–2D model which couples 2D

ARTICLE IN PRESS
Fig. 1. Map of Venice lagoon.
L. D’Alpaos, A. Defina / Computers & Geosciences 33 (2007) 476–496478
elements for the flow over shallow areas and largechannels, and 1D elements for the flow in the smalltidal channels and creeks. Section 4 focuses onproblems related to the numerical treatment ofconvective acceleration. In Section 5 the problem ofassessing the eddy viscosity coefficient, to accuratelyestimate the horizontal Reynolds stresses is dis-cussed. Finally, some concluding remarks are madein Section 6.
2. Wetting and drying, and the dynamics of very
shallow flows
The wetting and drying problem has receivedconsiderable attention during the last two decades.Recent reviews, mainly concerned with numericalaspects of this problem, can be found in the worksof Balzano (1998), Bates and Hervouet (1999) andBates and Horritt (2005). The wetting and dryingproblem can be handled either by adapting thenumerical grid at each time step to follow thedeforming flow domain (Lynch and Gray, 1980;Kawahara and Umetsu, 1986; Akanbi and Kato-podes, 1988) or by retaining a fixed computationalgrid and utilizing some additional algorithms todeal with the hydrodynamics of partially wetelements. Due to the great difficulty of developingefficient deformable grid techniques, a fixed gridapproach is by far preferable. Moreover, because ofa lower computational cost, fixed grid approachescan utilize more elements for the domain discretiza-tion and hence directly include more topographicinformation. In this case a whole range of algo-
rithms is available to identify partially wet elementsand to control the flow over these (King and Roig,1988; Leclerc et al., 1990; Falconer and Chen, 1991;Bates et al., 1992; Braschi et al., 1994; Defina et al.,1994; Hervouet and Janin, 1994; Defina andZovatto, 1995). These algorithms are often closelyrelated to a particular numerical scheme and theirapplication to a different numerical model is notstraightforward (Balzano, 1998). Moreover, thesealgorithms are usually just devised to overcome thenumerical problems arising in the presence ofwetting and drying and they generally fail (e.g.Umgiesser et al., 2004) to capture adequately theflow physics.
It is worth pointing out that, when dealing withvery small water depths and wetting/drying for largeparts of the domain, an important source ofphysical inaccuracy comes from the fact thatnumerical models approximate the bottom with apiece-wise homogeneous plane surface. In thisway they do not properly account for the localvariations of the flow field produced by small-scale topography, thus yielding to rather roughdistributions of velocity and depth. However, suchdetails of the flow features are usually not requiredand the averaged, or macroscopic, flow field issufficient. Thus, the above problems can be partiallyovercome by setting up a phenomenological repre-sentation of the overall processes, based upon theavailable data, to supply a more refined, statisticallyequivalent, description of the physics. Based on theidea that refined subgrid modeling of groundtopography could lead to a physically consistent,

ARTICLE IN PRESSL. D’Alpaos, A. Defina / Computers & Geosciences 33 (2007) 476–496 479
and ‘‘universal’’ (i.e., not dependent on the numer-ical technique) solution of the wetting and dryingproblem, a suitable set of two-dimensional shallowflow equations was developed (Defina et al., 1994;Defina and Zovatto, 1995), and improved over theyears (Defina, 2000a) in order to deal with partiallywet and very irregular domains. On consideringbottom irregularities from a statistical point of view,and assuming the hydrostatic approximation, thethree-dimensional Reynolds equations have beensuitably averaged over a representative elementaryarea (REA) and then integrated over the depth. Theresulting subgrid model for ground irregularitiesproved very effective in the simulation of tidepropagation in shallow lagoons and over salt-marshes. The averaged equations read (Defina,2000a):
rhþ1
g
d
dt
q
Y
� �þ J� r � Re ¼ 0, (1)
ZðhÞqh
qtþrq ¼ 0, (2)
where h is the free surface elevation, g is gravity, t
denotes time, q ¼ ðqx; qyÞ is the flow rate per unitwidth, Y the equivalent water depth, defined as thevolume of water per unit area actually ponding thebottom, Z the local fraction of wetted domain whichcan be interpreted as an h-dependent storativitycoefficient accounting for the actual area that can bewetted or dried during the tidal cycle (Fig. 2), J ¼ðJx; JyÞ is energy dissipation per unit length due tobottom shear stress, and Re accounts for thehorizontal stresses, which are usually computedusing an eddy viscosity model as
Re ¼vT
gr
q
Y
� �, (3)
where nT is eddy viscosity.
Fig. 2. Bathymetry within a representative elementary area
(REA) and corresponding behavior of function Z representing
fraction of wetted area.
The bottom topography within a REA is assumedto be irregular with bottom elevations distributedaccording to a Gaussian probability density func-tion. In this case the functions Z and Y are found tobe (Defina, 2000a):
Z ¼1
21þ erf ½2D=ar�� �
, (4)
Y ¼ ar ZðD=arÞ þ1
4ffiffiffipp exp �4ðD=arÞ
2� �
, (5)
where erf( � ) is the error function, ar is the typicalheight of bottom irregularities (i.e., the maximumamplitude of bottom irregularities or, approxi-mately twice the standard deviation of bottomelevations), D ¼ h� zb is the average water depth,zb being the average bottom elevation within aREA. For the case of turbulent flow over a roughwall, the energy dissipations, or equivalently the bedshear stress can be written as (Defina, 2000a)
J ¼tb
grY¼
n2jqj
H10=3
� �q, (6)
H=ar ffi Y=aþ 0:27ffiffiffiffiffiffiffiffiffiffiffiY=ar
pe22Y=a1 , (7)
where tb ¼ ðtbx; tbyÞ is bottom shear stress, r is fluiddensity, n is the Manning bed roughness coefficient,and H is an equivalent water depth which can beapproximated with the following interpolationformula.
The above set of equations reduce to standard St.Venant equation as the local water depth issufficiently greater than bottom irregularities am-plitude ar (i.e. D41:5�2ar). The one-dimensionalform of the above equations has been successfullyused by Lanzoni and Seminara (2002) to study thelongitudinal equilibrium profile of tidal channels.
In order to highlight the effectiveness of the aboveequations we revisit here the simple examplediscussed by Defina (2000a) and take it as thebenchmark for additional example simulationsconcerning further different modeling problemsdiscussed in the next sections.
A portion of the marshes located in the southernpart of the Venice lagoon is carefully modeled andthe tidal propagation then simulated. Eqs. (1) and(2) are integrated using a semi-implicit staggeredfinite element scheme based on Galerkin’s approach(Defina, 2003). Convective terms in the momentumequations are discretized using an explicit Lagran-gian method (Defina and Bonetto, 1998).

ARTICLE IN PRESSL. D’Alpaos, A. Defina / Computers & Geosciences 33 (2007) 476–496480
The domain is divided into triangular elements(Fig. 3a), the free surface elevation is assumedlinearly varying between element nodes while theflow rate per unit width q is assumed constantwithin each element. It is worth pointing out herethat since the number of elements is about twice thenumber of nodes, the resulting velocity field is verydetailed and makes it possible to accuratelycompute the convective acceleration. Details of theadopted numerical scheme can be found in theworks by Defina et al. (1994), D’Alpaos and Defina(1995), Defina (2003). A very detailed mesh and,alternatively, a quite coarse mesh are used todescribe the part of the domain occupied by the
Fig. 3. The simulated marshes area located in southern part of Venice
elements and �1500 nodes: cells resolution is approximately �30m; an
nodes: cells resolution is approximately �260m. (b) Bathymetry of refin
mesh.
marshes (Fig. 3a). The refined mesh is composed ofabout 3000 triangular elements and 1500 nodes.
As a term of comparison, the description, withthe same degree of refinement, of the whole Venicelagoon, which extends over an area of approxi-mately 500 km2, would require about 106 elements.The bathymetry of the study area is shown inFig. 3b. The average bottom elevation within thearea covered by the marshes is zb ¼ �0:5m, with astandard deviation sb ¼ 1:0m.
The coarse mesh, shown in Fig. 3a, is constructedwith only 37 triangular elements covering the areaoccupied by the marshes. In this case, nearly 7500elements would be required to discretize the whole
Lagoon. (a) Refined finite element mesh (thin line) with �3000
d coarse finite element mesh (thick line) with 68 elements and 47
ed mesh. (c) Velocity field during flood tide computed with refined

ARTICLE IN PRESS
Fig. 4. Comparison among water elevations at land ward side of
domain (a) and cross flow rates through marshes (b) computed in
three different runs: refined mesh with ar ¼ 0.0001m;
coarse mesh with ar ¼ 0.0001m; coarse mesh
with ar ¼ 2.0m.
L. D’Alpaos, A. Defina / Computers & Geosciences 33 (2007) 476–496 481
Venice lagoon. It is worth noting that most finiteelement models of the Venice lagoon use meshescomprising 5000–12,000 elements (Umgiesser andBergamasco, 1993; Magistrato alle Acque di Vene-zia, 1997; Umgiesser et al., 2004). Thus, the presentcoarse mesh has a comparable resolution.
All simulations are performed neglecting hori-zontal Reynolds stresses and assuming a Manningroughness coefficient n ¼ 0:04m�1=3 s. The follow-ing boundary conditions are imposed. At nodesbearing to the seaward side, water elevations areprescribed which vary periodically according to thelaw h ¼ 0:5 sinð2pt=TÞ, with a tide period T of 12 h.Along the other three sides, impervious boundaryconditions are assumed.
In the first run, based on the refined mesh, bottomirregularities are neglected by setting ar ¼ 0:0001m,which is equivalent to solving the standard St.Venant equations (Defina, 2000a). Fig. 3c, showsthe velocity field during the flood tide and clearlysuggests that the tidal wave propagates across themarshes mainly through the network of narrow anddeep channels. The considerable ‘permeability’ ofthe marsh structure leads to a slightly reduction ofthe tidal wave amplitude in passing from the sea tothe landward side of the domain (Fig. 4a). Thebathymetry statistics and the results of this simula-tion are taken as benchmark for the followingsimulations.
The second and third simulations were carriedout using the coarse mesh shown in Fig. 3a, settingthe average bottom elevation of all elementspertaining to the marshes to zb ¼ �0:5m andassuming alternatively ar ¼ 0:0001m, and ar ¼
2sb ¼ 2:0m. The first case is equivalent to solvingthe standard St. Venant equation on the coarse grid(Defina, 2000a), while the second one considers thestatistical subgrid modeling of ground topography.
The resulting water elevations at the inland sideare plotted against time in Fig. 4a to allow thecomparison with the water elevations computed inthe first run. It clearly appears that solving thestandard St. Venant equations on the coarse gridresults in a poor prediction of tidal wave propaga-tion. In this case, in fact, since small deep channelsare not described, the marshes act as a barrier whichopposes the tide propagation, thus implying asignificant reduction of tidal wave amplitude.However, when the channel network is statisticallyaccounted forthrough the subgrid model (i.e., bysetting ar ¼ 2:0m), the resulting water elevations atthe landward side compare favorably with those
computed on the refined mesh and only a smallphase shift is observed. The same conclusions aresupported by Fig. 4b which shows the comparisonbetween the total flow rates predicted through asection taken across the marsh area for the threedifferent runs.
It is worth pointing out that artificially increasingthe marsh permeability to tide propagation bydecreasing the friction (i.e., by adopting smallervalues for the Manning coefficient) is not anacceptable solution. When this is done to improvefitting of computed values to experimental data,unrealistic values for the friction coefficient arefound (e.g., Umgiesser et al., 2004, Table 1). As aconsequence, the model can predict actual tidallevels but cannot be confidently used to predict tide

ARTICLE IN PRESSL. D’Alpaos, A. Defina / Computers & Geosciences 33 (2007) 476–496482
propagation when topography and/or climate aredifferent from that for which the model wascalibrated. The above examples clearly demonstratethe efficiency of the proposed equations. However, anumber of open issues need to be addressed:
(i)
Fig. 5. Refined computational grid overlapping a marsh area in
Eq. (6) for bed shear stress was derived on theassumption of an isotropic distribution ofbottom irregularities. This is not always thecase, in the example discussed here the creeksdissecting the marshes drive tidal flow alongpreferential directions (see Fig. 3b);
northern Venice lagoon near Treporti.
(ii) The model does not account for water whichmay remain trapped within the REA during thedrying phase. However, experimental evidencesuggests that sometimes small pools or pansremain after the tidal wave receded;(iii)
The proposed model for bed shear stressneglects momentum exchange due to convectiveacceleration at the subgrid scale.It is thus clear that the subgrid topography modeldiscussed here is deserving of further research.Finally, further problems arise when modelingconvective accelerations and Reynolds stresses indynamic moving-boundary problems as it will bediscussed in Sections 4 and 5.
3. Small-scale channel network
The problem of describing the details of thechannel network crossing a shallow lagoon ispartially related to the previously discussed pro-blem. In the example discussed above, narrow butdeep channels crossing the domain can be easilyrecognized (Fig. 3b). These channels are included inthe model as ‘‘bottom irregularities’’. A cleardividing line between actual ground irregularities,which are expected to behave quasi-isotropically,and small scale channels and creeks, can not betraced. However, the small scale drainage network,comprising channels having a very small widthcannot be resolved by a two-dimensional modelwhen the flow domain is comparably large as thiswould require a large number of very smallcomputational elements. An example is shown inFig. 5 where a refined grid of the Venice lagoon,comprising nearly 40,000 elements, overlaps anaerial photograph of a marsh zone in the northernpart of the lagoon. A tangle of small, highlymeandering channels with a width in range between0.1 and 2m covers most of the marsh surface. The
mesh resolution required to describe all thesechannels is beyond present computational capabil-ities. In this case, and as a first approximation, thesmaller channels can be treated as topographicirregularities as described in Section 2. On the otherhand, large channels (e.g., channels departing fromthe inlets shown in Fig. 1) can be better describedusing two-dimensional elements.
Here the attention is focused on intermediatescale channels, i.e., channels with a size which issmall enough to prevent the use two-dimensionalelements for their description, and large enough todissuade one from including them as bottomirregularities. These narrow channels are usuallyvery numerous and their importance turns out to becomparable to that of large channels (Defina, 2004).The problem of accounting for the intermediatescale channel network can be tackled observing thatthe flow within relatively deep and narrow channelsflanked by shallow intertidal areas exibits a dis-tinctive one-dimensional character, thus suggestingthe use of one-dimensional elements to representthem in the model (D’Alpaos and Defina, 1995).
The problem of coupling one- and two-dimen-sional elements has sometimes been found inthe literature, e.g. SOBEK, developed by WL|Delft
Hydraulics [http://www.sobek.nl], and LISFLOOD-FP (Bates and De Roo, 2000; Horritt and Bates,2001a, b). To keep a high accuracy and reduce thecomputational effort, a particular way of coupling a2D model to describe the shallow water hydro-dynamics with a 1D model to simulate the flow inthe channels has been developed (D’Alpaos andDefina, 1993, 1995). The following is a brief reviewof this model.
In the model, channels are superimposed on thetwo-dimensional domain as shown in Fig. 6. Theeffects due momentum exchange between the

ARTICLE IN PRESS
Fig. 6. Coupling of two-dimensional and one-dimensional
elements.
Fig. 7. Coupling of 1D and 2D elements when siding 2D
elements are wet (upper panel) or dry (lower panel), with
notation.
L. D’Alpaos, A. Defina / Computers & Geosciences 33 (2007) 476–496 483
channel and the two-dimensional flow are smallif compared with the bottom resistance, and werethus neglected. Under this assumption 2D2 mo-mentum equations take the form (1) while the latterreads
qh
qsþ
1
gA
qtþ
Q
gA2
qðQ=AÞ
qsþ
n2QjQj
R4=3H A2
¼ 0, (8)
where s is the channel axis direction, Q the actualflow rate through the channel, A the cross-sectionalarea, and RH the hydraulic radius.
One-dimensional continuity equation needs to besuitably modified to account for the overlaying two-dimensional flow when 2D elements adjacent to thechannel are wet (Fig. 7a). In this case a reducedchannel flow rate, Qr is introduced, given by
Qr ¼ Q� usY sB, (9)
where us and Ys are the velocity in the channel axisdirection and the flow depth of the overlaying two-dimensional flow, and B is the channel width.Assuming, as a first approximation, uniform flowconditions along the channel axis and using theManning formula we obtain
Qr � Q 1� ðY s=Y cÞ5=3
h i, (10)
where Yc is the channel flow depth. Since waterstorage related to the change in time of the freesurface elevation is already accounted for by the
overlaying 2D elements, the 1D continuity equationreads
qQr
qs¼ 0, (11)
Bqh
qtþ
qs¼ 0, (12)
When both 2D elements adjacent to the channel aredry (Fig. 7b) the standard continuity equation holds
Eqs. (10), (11) and (12) can be combined to give
�Bqh
qtþ
qs� ð1� �Þ
qqs
QðY s=Y cÞ5=3
h i¼ 0, (13)
where e is an index which is set to one when the 2Ddomain adjacent to the channel is dry (i.e., Y s ¼ 0),and zero when it is wet.
In the model, the two-dimensional and one-dimensional flow equations are solved by a finiteelement scheme. The domain is divided intotriangular and linear elements with each channellying along the common side of two adjacenttriangular elements (Fig. 6). In this way eachchannel can be added to or removed from thedomain without any change in the main two-dimensional discretization. The number of nodesin the computational grid remains unchanged andthe computational effort is only slightly increaseddue to inclusion of 1D elements.
The model has been tested against the numericalsolution computed with a 2D model for a number oftest cases (D’Alpaos and Defina, 1995). Here a new

ARTICLE IN PRESS
Fig. 9. Comparison among water elevations at land ward side of
the domain (a) and cross flow rates through marshes, (b)
computed with ar ¼ 0.0001m, in three different runs:
refined mesh; coarse mesh and coarse mesh with
one-dimensional channels.
L. D’Alpaos, A. Defina / Computers & Geosciences 33 (2007) 476–496484
example is presented and discussed in order tohighlight the importance of small channels and thecapability of the model to account for theirpresence. The domain shown in Fig. 3a, within thearea covered by the marshes, is discretized using 59triangular elements and 27 linear elements (Fig. 8).The computational mesh is thus approximately ascoarse as the coarse one shown in Fig. 3a. However,the channel pattern shown in Fig. 3b is nowexplicitly accounted for through the introductionof the one-dimensional elements. The computedwater elevations at the inland side are plottedagainst time in Fig. 9a and compare favorably withthose computed using the refined mesh (Section 2).One additional run is performed after removing all1D elements from the mesh. The results of thissimulation are compared in Fig. 9a with theprevious results. It is clear that not including thechannels results in a poor prediction of tidal wavepropagation. The same conclusions are supportedby Fig. 9b which shows the comparison between thetotal flow rates predicted through a section takenacross the marsh area for the three different runs.
The proposed model is also applied to the wholeVenice lagoon (D’Alpaos and Defina, 1993) delib-erately using a very coarse mesh comprising 2280triangular elements and 985 linear elements(Fig. 10). As discussed by D’Alpaos and Defina(1993), the predicted water elevations and meanvelocities compare favorably with field measure-ments. Moreover, as shown in Fig. 11, the results ofthe coupled model are more accurate than thoseobtained using a standard two-dimensional modelbased on a more refined mesh which uses approxi-mately 12,000 elements.
As a further example we simulate, with a minoradditional effort, the tidal propagation within thechannel network of the inner city of Venice. Thepreviously described computational mesh is locallyrefined to include all channels (i.e., one-dimensional
Fig. 8. Coarse finite element mesh with 68 triangular elements, 47
nodes and 28 one-dimensional elements: cells resolution is
approximately �260m. Based on topography of marsh area,
bottom elevation of 2D elements is set to zb ¼ 0.15m and ar is set
to 0.7m.
elements) crossing the city. We obtained a meshcomprising 2330 triangular elements and 1430 linearelements (Fig. 12). The tide propagation along thechannels of the city of Venice is simulated and theresults compared to field data (D’Alpaos et al.,1995). A satisfactory agreement between the mea-sured and computed free surface elevations at Puntadella Salute and Rialto is found (Fig. 13). Themeasured and computed flow velocity also comparefavorably well. An example of this comparisonfocusing on the northern part of Venice is shown inFig. 14. It is worth pointing out that the tide reachesthis area through an inner path (Canal Grande) andan outer path (Canale delle Fondamente Nuove).The flow established in the channels linking thesetwo main paths is governed by the extremely smallfree surface gradient produced by the small phase

ARTICLE IN PRESSL. D’Alpaos, A. Defina / Computers & Geosciences 33 (2007) 476–496 485
shift of the tidal wave. Predicting the flow in thesechannels is thus quite a demanding task which can
Fig. 10. Finite element mesh with 2280 triangular elements, 985
linear elements, and 1494 nodes.
Fig. 11. Comparison between measured and computed free surface ele
present 2D-1D model, � � � � � � � computed with a standard two-dimen
be carried out effectively using the model proposedhere.
The main drawback affecting the describedcoupling technique lays in the simplificationsembedded in Eq. (10). In particular, the channelcross section is approximated as rectangular, andmomentum exchange between the channel and theadjacent two-dimensional flow is neglected. More-over, the one-dimensional flow approximation canbe assumed only if Ys/Yc51.
4. Convective terms in 2D models
In the present Section, discussion is focused onproblems related to the numerical treatment ofconvective acceleration. Many of the models used tosimulate tidal flow in shallow lagoons deliberatelyneglect convective terms in the momentum equa-tions in order to avoid numerical instability andnumerical inaccuracy. Such an approximation isfully justified if platform morphology and bottomtopography are rather irregular, as is the case ofVenice lagoon, and the computational grid iscoarse. In this case, in fact, neglecting convectiveterms leads to errors far smaller than thoseintroduced by retaining these terms. In fact,convective acceleration can only be properly ac-counted for when the velocity field resolved by themodel is very detailed.
vations at three locations in Venice lagoon. —— Computed with
sional model, measured.

ARTICLE IN PRESS
Fig. 12. Finite element mesh describing network of channels within city of Venice (left), and city of Venice from satellite (right).
Fig. 13. Comparison among measured and computed free surface elevations at Punta della Salute and Rialto within city of Venice.
L. D’Alpaos, A. Defina / Computers & Geosciences 33 (2007) 476–496486
However, neglecting convective terms does notmean neglecting the effects due to convective terms.In many cases, velocity distributions computed byneglecting convective terms are far different fromthose computed when convective terms are retained.An example is given in Fig. 15, which shows thevelocity field at a lagoon inlet during an ebb tide. Thedifferences between the flow fields obtained by eitherneglecting or considering convective acceleration arevery clear. However, even in these cases, the overalleffects of convective terms can be accounted for byadjusting the friction coefficient in order to produce avelocity field which is equivalent to actual flow fieldfrom a ‘‘mean’’ or ‘‘large scale’’ point of view (e.g.the flow rate through the inlet is correctly predicted).
In fact, unresolved accelerations (i.e., subgridaccelerations) averaged over a sufficiently large area
mostly produce extra dissipation, which is usuallyaccounted for by suitably increasing the Manningroughness coefficient. This is done during the modelcalibration step, since, at present, no relationshipsare available relating the roughness coefficient tofiltered velocity distributions. It would clearly beuseful to have relationships allowing the a prioriestimation of the appropriate roughness corrections.Finding suitable solutions to this problem is a quitedemanding task due to the large variety of mechan-isms producing a spatially heterogeneous velocityfield. Among the many, bottom topography in thepresence of small water depths is possibly the easiestto handle. An attempt at quantifying the effectsproduced by small scale (i.e., subgrid) momentummixing triggered by bottom irregularities is hereproposed. The problem is approached in a way

ARTICLE IN PRESS
Fig. 14. Comparison among measured (left) and computed (right) velocity along some channels within city of Venice (see squared area in
Fig. 13).
L. D’Alpaos, A. Defina / Computers & Geosciences 33 (2007) 476–496 487
similar to the ‘‘mixing length’’ approach in turbu-lence, it is indeed possible to establish a relationshiprelating the roughness coefficient to filtered velocitydistributions when flow is very shallow and mixingof momentum is mainly due to an irregular bottomtopography.
Consider a point x within a REA. By neglec-ting acceleration, and using the Manning for-mula, the depth averaged velocity u at this pointreads:
uðxÞ ¼1
ndðxÞ2=3J1=2, (14)
where n is the Manning friction coefficient, d is thelocal water depth, and J is the energy dissipation perunit length in the flow direction, which is assumedto be constant within the REA (Defina, 2000a). Theflow rate per unit width at x is
qðxÞ ¼1
ndðxÞ5=3J1=2. (15)
We next introduce a horizontal mixing length r andassume that, due to the convective transport ofmomentum the actual velocity at x is the velocity atx+r when acceleration is neglected, as given by Eq.(14). The actual flow rate per unit width at point x isthen given by
qðxÞ ¼1
ndðxÞdðxþ rÞ2=3J1=2. (16)
To obtain the true flow rate q(x) when convectiveterms are neglected, an equivalent Manning coeffi-cient, neq, can be used in Eq. (15). This is found byequating (15) to (16), and phase averaging over theREA (Defina, 2000b)Z
Aw
1
neqdðxÞ5=3J1=2 dA ¼
ZAw
dðxÞdðxþ rÞ5=3J1=2 dA,
(17)
where Aw the wetted part of the REA. With furtherminor assumptions, detailed in the Appendix, Eq.(17) can be rearranged to read
neq
n¼
36ðY=arÞ2þ 5Z3
36ðY=arÞ2� Z3 þ 6CbwðrÞZ3
, (18)
where Y is the effective water depth (see Eq. (5)) andCbw(r) an auto-correlation function of bottomelevations, given as
CbwðrÞ ¼
RAw
zðxÞzðxþ rÞdA� z2wb
s2wb, (19)
where zwb and sbw are the average and the rootmean square of bottom elevations within the wettedpart of the REA, r is a horizontal ‘‘mixing length’’,and z is local bottom elevation. Note that whenCbw(r) ¼ 1, i.e. the bottom is smooth, then neq ¼ n.
In order to test the validity of Eq. (18) somenumerical experiments are carried out. A rectangular

ARTICLE IN PRESS
Fig. 15. Computed flow velocity distribution at Chioggia inlet (see Fig. 1) during ebb tide, (a) considering and, (b) neglecting convective
acceleration.
L. D’Alpaos, A. Defina / Computers & Geosciences 33 (2007) 476–496488
domain (which represents a small part of the Venicelagoon), characterized by a very irregular bottomprofile, gently sloping from right to left, isdiscretized using triangular elements (Fig. 16). Theupper and lower boundaries are assumed to beimpermeable, while along the right and left bound-aries, constant free surface elevations are prescribedin order to produce a uniform (on average) flowfrom right to left. Two different values of theManning friction coefficient are adopted, namelyn ¼ 0:04m�1=3 s and n ¼ 0:02m�1=3 s.
A number of simulations are then performed byvarying the imposed flow depth. Each simulationconsists of two steps. In the first step a model whichincludes convective acceleration is run and theaverage flow rate computed. In the second step,the same model, with the convective terms removed,is run and the Manning coefficient adjusted until the
computed flow rate turns out to be the same as theone computed in the first step. In this way theequivalent Manning coefficient is found.
The ratio of the actual (n) to the equivalent (neq)Manning coefficient as a function of the relativewater depth D/ar is plotted in Fig. 17 where Eq. (18)for CbwðrÞ ¼ 0 and CbwðrÞ ¼ 1 is also plotted for thesake of comparison. The numerical points laywithin the region described by the two theoreticalcurves and the behavior of the numerical solution isin quite good agreement with the theoretical curvefor CbwðrÞ ¼ 0. Importantly, the numerical solutionapproaches this limit curve as the Manning frictioncoefficient decreases. This is an expected result sinceincreasing the Manning coefficient reduces frictionand enhances large scale momentum mixing. As aconsequence, the mixing length, r, increases andCbw(r) decreases toward zero.

ARTICLE IN PRESS
Fig. 17. Computed equivalent Manning coefficient compared to
theoretical prediction.
Fig. 16. Mesh and bathymetry of simulated marshes area located
in southern part of Venice Lagoon.
L. D’Alpaos, A. Defina / Computers & Geosciences 33 (2007) 476–496 489
Despite the many assumptions introduced toobtain a closed solution of the problem, Eq. (18)is a very simple and effective formula, which givesthe equivalent Manning coefficient as a function ofthe actual Manning coefficient and relative waterdepth D/ar. According to Eq. (18), for relativedepths D=aro1 the equivalent Manning coefficientcan be as large as twice the actual one. When using acoarse mesh, with a typical size of elements rangingabout 50–100m, the above condition corresponds toa water depth smaller than approximately 0.5m(e.g., the average flow depth within the Venicelagoon).
Eq. (18) must be considered as a first, promisingattempt at quantifying the effects produced by smallscale (i.e., subgrid) momentum mixing triggered bybottom irregularities. Indeed, further research isrequired to evaluate the mixing length r to be usedin Eq. (19).
The above discussion addresses the effects due toconvective acceleration arising from bottom irregu-larities with a height comparable to flow depth.Further numerical/physical problems are related toconvective acceleration or, with more generality, tospatial distributions of velocity and its spatialderivatives which also impact on Reynolds stresses.For example, models used to simulate large flowdomains usually assume a free slip condition alongthe impermeable boundaries of the domain. Indeed,this is a reasonable assumption since the shear layerdeveloping along the vertical impermeable bound-aries has a thickness comparable to local waterdepth, i.e. much smaller than the linear size ofcomputational elements. As a consequence, themodel cannot resolve the gradual transition ofvelocity from zero at the wall to a value mainlydepending on local bottom friction and free surfacegradients at some distance away from the wall.
However, the above assumption leads to somecomplications in moving boundary problems parti-cularly when bathymetry sharply changes from deepto shallow (e.g., from channels to marshes) and theshallow part of the computational domain is wettedand dried during the tidal cycle. A free shear layerdevelops between the channel and the adjacentshallow areas with a thickness comparable to localflow depth (i.e., with a size that cannot be resolvedby the model). Through this shear layer mass andmomentum are transmitted. However, due its smallthickness, this shear layer can be viewed as a verticalpermeable boundary separating the flow field in thechannel from the flow field on the marsh. Acrossthis shear layer the flow depth and velocity are‘discontinuous’ if observed at the scale of computa-tional elements thus introducing a Riemann pro-blem which requires suitable numerical algorithms ifit is to be correctly resolved. In this case, a free slipcondition should be imposed along the shear layer(see the above discussion) which is equivalent tolocally neglecting horizontal Reynolds stresses.However, identification of shear layers within airregular domain, especially when water depthchanges in time, is a quite demanding task. In orderto overcome this problem Reynolds stress terms areoften dropped in momentum equations and their

ARTICLE IN PRESSL. D’Alpaos, A. Defina / Computers & Geosciences 33 (2007) 476–496490
effects are accounted for by suitably adjusting thefriction coefficient as part of the calibrationprocedure.
The above discussion introduces the last openissue discussed in the present paper.
5. Turbulence closure models in 2D models
The Boussinesq approximation is commonly usedto model the Reynolds stresses expressed as afunction of the velocity gradients and a turbulenteddy viscosity, nT. In the present section theproblem of assessing the eddy viscosity coefficientsis discussed. The issue has relevance in manyhydrodynamics problems (Wilson et al., 2002).
The simplest model considers a constant eddyviscosity. In this case a single value of the parameternT is specified throughout the domain and since thisis usually an unknown value this may form part ofthe calibration procedure. The most commonly usedvalues range from 0.1 to 10m2/s, with larger valuesused when the computational domain is large andthe mesh is comparably coarse.
A slightly more refined model is the Elder model(e.g., Fisher et al., 1979) which accounts fordispersive effects induced by non uniform velocityalong the vertical. According to this model, eddyviscosity is given as
vT ¼ �0u�Y , (20)
where u* is bed shear velocity and e0 a coefficient.Suggested values for this coefficient are �0 ¼ 0:0765(Rastogi and Rodi, 1978), �0 ¼ 0:15 (Fisher, 1973),�0 ¼ 0:4221:61 (Fisher et al., 1979). Hereinafter,this model will be referred to as zero-order modelsince the eddy viscosity depends on flow depth andlocal velocity rather than on velocity gradients.
A number of more refined models are available inthe literature (see Rodi (1980), and Wilcox (1988)for a through review on the subject). Here, thediscussion is focused on the k–e and Smagorinskymodels which, among the many, are indeed the mostoften used.
In the k–e model, eddy viscosity is expressed bycombining the turbulent kinetic energy, k and therate of dissipation of turbulent kinetic energy e as
vT ¼ cmk2
�, (21)
where cm is a calibration factor, usually set to cm ¼
0:09 (Rodi, 1980). Turbulent kinetic energy and itsdissipation rate are computed by solving two
additional transport equations, namely the depthaveraged equations for k and e developed byRastogi and Rodi (1978). In this model, turbulentkinetic energy depends on two production terms.The first term accounts for production due to bedshear stress (Rodi, 1980), thus depending on thelocal flow velocity, as in the zero-order model. Thesecond term accounts for the horizontal rate ofstrain and, therefore, depends on spatial derivativesof velocity. The latter contribution is usually muchgreater than the former.
It is worth recalling that the k–e model is basedon the assumption that two length scales arerecognizable in the flow field, namely a turbulencelength scale and a mean flow length scale. There-fore, the model assumes that all flow structures witha size greater than background turbulence must beresolved by the hydrodynamic model. In geophysi-cal scale flow problems this is usually not possible.In fact, the finite (and large) size of the computa-tional elements gives rise to a numerical averagingprocess disregarded by the model. In this way, allvortical structures with a size smaller than orcomparable to that of the computational elementsare filtered out and their effects are neglected.
However, large eddy simulation technique (LES)uses a subgrid model to account for turbulent eddiesnot resolved by the model. Clearly, the subgridmodel should contain a length scale discriminatingsmaller from larger vortices. Indeed, this lengthscale must be related to the size of the computa-tional grid. The model proposed by Smagorinsky(Smagorinsky, 1963, 1993) is very simple and meetsthe above requirement. The Smagorinsky modeldescribes the turbulent eddy viscosity in a mannersimilar to Prandl mixing length model
vT ¼ ðCsDÞ2jSj, (22)
where S is the rate of strain tensor, D a linear size ofthe computational elements and Cs is a calibrationfactor ranging between 0.17 and 0.23. It is worthpointing out that the Smagorinsky model, originallydeveloped to describe a three-dimensional flowfields, is commonly (and improperly) used in two-dimensional models by simply dropping contribu-tions due to vertical velocity gradient. Therefore,the two-dimensional Smagorinsky model doesnot account for turbulence production due to bedshear stress (i.e., vertical shear rate). A depthintegrated Smagorinsky model, which accounts forthe effects due to vertical shear, has been recentlyproposed by Stansby (2003) and Uittenbogaard and

ARTICLE IN PRESSL. D’Alpaos, A. Defina / Computers & Geosciences 33 (2007) 476–496 491
van Vossen (2003). However, unlike the k–e model,the Smagorinsky model also neglects convective anddiffusive transport of turbulence, and indeed nT onlydepends on the local velocity field, i.e. the adapta-tion of turbulence characteristics to the local flowfield is assumed to be instantaneous. On the otherhand, the Smagorinsky model is computationallyefficient because no additional equations must besolved to compute the eddy viscosity.
Importantly, a length scale characterizing the sizeof the computational grid (i.e., D) is embedded inthe model for eddy viscosity. The performance ofthe above models is different and the differences arerelevant. To show this, a simple example ispresented and discussed. The chosen example usesa schematic lagoon inlet (Fig. 18) whose size isindeed comparable to that of the Malamocco inletand the Chioggia inlet of the Venice lagoon. Thefollowing steady boundary conditions are imposed.At nodes bearing to the inner boundary (i.e., withinthe lagoon) water elevation is prescribed to be zero.
Fig. 18. Computational mesh with 10377 elements, and 5406
nodes (upper panel) and bathymetry (lower panel) for tidal inlet
used in simulations.
At seaward boundary nodes, constant water eleva-tion is prescribed, namely h ¼ 0:2m a.m.s.l. tosimulate flood conditions and h ¼ �0:2m a.m.s.l.to simulate ebb flow conditions. Along the othersides, no-flow boundary conditions are imposed.
Fig. 19 shows eddy viscosity distributions com-puted with the zero-order model, the k–emodel, andthe Smagorinsky model, during flood and ebb tides.The average intensity of predicted eddy viscosity isquite different among the three models (note thatthe gray scales in Fig. 19 extend over differentranges). Spatial distributions of eddy viscosityclearly reflect the different models’ assumptions.The Smagorinsky approach predicts high eddyviscosity where velocity gradients are large. How-ever, the eddy viscosity is quite small within the inletchannel, where the velocity is large but fairlyuniform. The zero-order model predicts high eddyviscosity along the inlet channel where the velocityis large. Note that during the ebb tide the currentissuing from the inlet is laterally compressed by thelarge counter-rotating vortices generated by theissuing jet. Therefore, velocity and eddy viscositymaintain large values away from the inlet also.
Eddy viscosities predicted by the k–e model aresensitive to both velocity and velocity gradients andattain rather low values as a consequence of thefiltering effect provided by the large size of thecomputational elements as previously discussed.
Differences among the results obtained with thethree models affect energy dissipation and, lastly,the computed flow rate through the inlet. Computedflow rates through the inlet show differences in therange 75% during flood and 72% during ebb.These differences turn out to be comparably smallbecause energy dissipation promoted by bed shearstress along the inlet channel is much greater thanenergy dissipation promoted by Reynolds stresses.
The above findings are confirmed by a furtherexample (Fig. 20), characterized by the introductionof a groyne normal to the inlet axis and attached atthe southern jetty of the inlet. Imposed boundaryconditions are the same as in the example of Fig. 19.However, in this case, when eddy viscosity iscomputed with the k–e model, the resulting smallReynolds stresses cannot control the flow down-stream of the groyne which becomes unstable andnearly periodic vortices can be observed to detachbehind the groyne (Fig. 21).
On comparing flow rates through the inletcomputed using the three different eddy viscositymodels (Fig. 22) it can be observed that although

ARTICLE IN PRESS
Fig. 19. Computed eddy viscosity distribution for flood tide (left) and ebb tide (right). Comparison between results computed with
Smagorinsky model with Cs ¼ 0.2 (upper panel), zero-order model with e0 ¼ 0.5 (middle panel) and k–e model (lower panel).
Fig. 20. Computed eddy viscosity distribution for flood tide (left) and ebb tide (right) when a groyne is attached at southern jetty of inlet.
Comparison between results computed with Smagorinsky model with Cs ¼ 0.2 (upper panel), zero-order model with e0 ¼ 0.5 (middle
panel) and k–e model (lower panel).
L. D’Alpaos, A. Defina / Computers & Geosciences 33 (2007) 476–496492
eddy viscosity differs on average by one order ofmagnitude among the models, differences betweencomputed flow rates are comparably much smaller.
It is worthwhile noting that differences among thethree models are less relevant in the presence of thegroyne, i.e., when horizontal Reynolds stresses aremore intense. This result is expected since the
vortices detaching from the groyne are mainlycontrolled by the geometry of the flow domain(i.e., by the length and shape of the obstruction).Moreover, the high velocities which establishthrough the narrower section of the issuing jetenhance energy losses due to bed shear stress thusobscuring energy dissipation promoted by the steep

ARTICLE IN PRESS
Fig. 21. Unsteady flow developing behind groyne with constant
boundary conditions.
Fig. 22. Comparison among flow rates through inlet with (a),
and without (b) groyne computed with three different eddy
viscosity models: (1) zero-order model, (2) k–e model, and (3)
Smagorinsky model.
L. D’Alpaos, A. Defina / Computers & Geosciences 33 (2007) 476–496 493
velocity gradients in the shear layer developingbetween the main current and the wake behind thegroyne.
6. Conclusions
Although considerable progress has been made inthe application of two- and three-dimensionalshallow water models to simulate flow in estuariesand coastal lagoons, a number of outstanding
problems of physical process representation stillremain in this branch of computational fluiddynamics. Most of them arise because of the diffi-culties in describing with due accuracy the geometryof rather complex domains and the resulting flowfield. Refining of the computational grid is not theproper procedure as uncertainties can be reducedand accuracy improved, but still subgrid closuremodels are required to account for effects due tosmall scale processes which are inexorably filteredout by the averaging procedures embedded in thenumerical solution.
Examples of subgrid models for tidal flowproblems in shallow basins show that phase aver-aging procedure is a simple and effective tool toconstruct subgrid models accounting for effectspromoted by bottom irregularities. Based on thisprocedure, the shallow water equations have beenreformulated. The proposed equations overcomethe limitations of previous approaches to theproblem of wetting and drying through a simplesubgrid model based on the statistics of bottomtopography and capable of achieving a significantdegree of process realism. The above procedure alsoallows one to assess energy dissipation due tomomentum exchange promoted by bottom irregu-larities. Accurate results are obtained even whencoarse computational grids are used.
It is worth mentioning that topographic remotesensing currently provides digital elevation data setswith a spatial resolution of 1m or less. Given typicalgrid sizes of the order 10–100m, such high-resolu-tion data allow to directly parameterize subgridscale topography (Bates and Hervouet, 1999; Bateset al., 2003).
Finally, it has been shown that most commonlyused models to evaluate the turbulent eddy viscositygive rather different results when applied to largescale two-dimensional flows. It is thus clear thattwo-dimensional turbulence modeling is deservingof further research possibly supported by accuratefield measurements.
Acknowledgments
The authors wish to thank Paul Bates and theanonymous reviewer for their detailed review of themanuscript. This work was supported by CO.RI.LA. under the research programs ‘‘Dispersioneintermareale, morfologia e processi morfodinamicia lungo termine nelle lagune’’ (linea 3.18) and‘‘Modellazione matematica e fisica di alcuni

ARTICLE IN PRESSL. D’Alpaos, A. Defina / Computers & Geosciences 33 (2007) 476–496494
processi di sedimentazione nella laguna di Venezia’’(linea 3.14).
Appendix
In Section 4, the equivalent Manning coefficientneq is given as
neq
n¼
RAw
dðxÞ5=3 dARAw
dðxÞdðxþ rÞ2=3 dA. (A1)
To solve Eq. (A1) the following approximation isintroduced
dðxÞa � daþ ad
a�1ðdðxÞ � dÞ þ aða� 1Þd
a�2
ðdðxÞ � dÞ2=2, ðA2Þ
where
d ¼1
Aw
ZAw
ddAw (A3)
is the intrinsic phase averaged water depth,related to effective water depth Y, throughd ¼ Y=Z.
Using Eq. (A2) we have
1
Aw
ZAw
dðxÞa dA � daþ
aða� 1Þ
2dða�2Þ
,
1
Aw
ZAw
ðdðxÞ � dÞ2 dA ¼ daþ
aða� 1Þ
2dða�2Þ
s2bw,
ðA4Þ
where is the Standard Deviation of bottom eleva-tions within the wetted fraction of the REA. UsingEq. (A2) we also have s2bw1
Aw
ZAw
dðxÞdðxþ rÞða�1Þ dA �ða� 2Þða� 3Þ
2
þ ð3� aÞða� 1Þdða�2Þ 1
Aw
ZAw
dðxÞdðxþ rÞða�1Þ dA
þða� 1Þða� 2Þ
2dða�3Þ 1
Aw
ZAw
dðxÞdðxþ rÞ2 dA.
ðA5Þ
The second term on the right hand side ofEq. (A5) is developed as follows
1
Aw
ZAw
dðxÞdðxþ rÞdA
¼1
Aw
ZAw
½h� zbðxÞ�½h� zbðxþ rÞ�dA
¼ h2þ
1
Aw
ZAw
zbðxÞzbðxþ rÞdA� 2hz2bw
¼ d2þ CbwðrÞs2bw, ðA6Þ
where Zwb ¼ h� d is the average bottom elevationwithin the wetted part of the REA and
CbwðrÞ ¼1
Aw
ZAw
zbðxÞzbðxþ rÞ2 dA� z2bw
��s2bw.
(A7)
Similarly, the third term on the right hand side ofEq. (A5) gives
1
Aw
ZAw
dðxÞdðxþ rÞ2 dA ¼ d3þ ds2bw þ 2dCbwðrÞs2bw.
(A8)
Eq. (A5) can thus be rearranged to read
1
Aw
ZAw
dðxÞdðxþ rÞða�1Þ dA � da
þða� 1Þða� 2Þ
2dða�2Þ
s2bw
þ ða� 1Þdða�2Þ
dða�2Þ
dða�2Þ
C2bwðrÞs
2bw. ðA9Þ
Substitution of Eqs. (A4) and (A9) in (A1) gives
neq
n¼
d2þ ðaða� 1Þ=2Þs2bw
d2þ ðða� 1Þða� 2Þ=2Þs2bw þ ða� 1ÞCbwðrÞs2bw
.
(A10)
Denoting and recalling that Fs ¼ s2bw=s2bd ¼
Y=Z, Eq. (A10) is rewritten as
neq
n¼
Y 2 þ ðaða� 1Þ=2ÞFss2bZ2
Y 2 þ ðða� 1Þða� 2Þ=2ÞFss2bZ2 þ ða� 1ÞCbwðrÞFss2bZ
2.
(A11)
Function is computed as follows Fs ¼ s2bw=s2b
Fs ¼1
s2b
1
Aw
ZAw
ðz� zbwÞdA ¼1
Zs2b
1
A
ZAw
ðz� zbwÞ2 dA
¼ 1� 8Y=ar
Z�
h� zb
ar
�, ðA12Þ
where zb is the average bottom elevation within theREA. For the sake of simplicity, the above equationis approximated as FsEZ (see Fig. 23).
Substituting the above approximation for Fs,recalling that arE2sb, and assuming a ¼ 5/3 (as forthe Manning formula), Eq. (A11) is rewritten as
neq
n¼
36þ ðY=arÞ2þ 5Z3
36þ ðY=arÞ2� Z3 þ 6CbwðrÞZ3
. (A13)
The behavior of neq/n is shown Fig. 24. Plottedcurves for different values of Cbw(r) are notsymmetric about D/ar ¼ 0. When D/ar50 the flowfield is characterized by a braiding pattern with theflow in each branch being independent from the

ARTICLE IN PRESS
Fig. 23. Behavior of as given by Eq. (A12) compared to function
Z (Eq. (4)). s2bw=s2b.
Fig. 24. Equivalent Manning coefficient (Eq. (A13)) for different
values of correlation Cbw(r).
L. D’Alpaos, A. Defina / Computers & Geosciences 33 (2007) 476–496 495
others. In this case, momentum mixing is negligiblysmall and equivalent Manning coefficient recover itsoriginal value (i.e., neq/nE1). When D/arb0 bottomirregularities have a minor impact on the velocityfield and neqEn. Note that when the bottom issmooth then Cbw(r) ¼ 1 and neq ¼ n.
References
Akanbi, A.A., Katopodes, N.D., 1988. Model for flood
propagation on initially dry land. Journal of Hydraulic
Engineering 114 (7), 689–706.
Balzano, A., 1998. Evaluation of methods for numerical
simulation of wetting and drying in shallow water flow
models. Coastal Engineering 34, 83–107.
Bates, P.D., De Roo, A.P.J., 2000. A simple raster-based model
for floodplain inundation. Journal of Hydrology 236, 54–77.
Bates, P.D., Hervouet, J.M., 1999. A new method for moving
boundary hydrodynamic problems in shallow water. In:
Proceedings of the Royal Society of London, Series A, 455,
3107–3128.
Bates, P.D., Horritt, M.S., 2005. Modelling wetting and drying
processes in hydraulic models. In: Bates, P.D., Lane, S.N.,
Ferguson, R.I. (Eds.), Computational Fluid Dynamics:
Applications in Environmental Hydraulics. Wiley, Chichester,
England, pp. 121–146.
Bates, P.D., Anderson, M.G., Baird, L., Walling, D.E., Simm,
D.E., 1992. Modelling floodplain flows using a two dimen-
sional finite element model. Earth Surface Processes and
Landforms 17, 575–588.
Bates, P.D., Marks, K.J., Horritt, M.S., 2003. Optimal use of
high-resolution topographic data in flood inundation models.
Hydrological Processes 17, 537–557.
Braschi, G., Dadone, F., Gallati, M., 1994. Plain flooding: near
and far field simulations. In: Molinaro, P., Natale, L. (Eds.),
Proceedings of the Specialty Conference on ‘‘Modelling of
Flood Propagation Over Initially Dry Areas’’, 29 June–1 July,
Milan (Italy). New York, American Society of Civil
Engineers, pp. 45–59.
D’Alpaos, L., Defina, A., 1993. Venice lagoon hydrodynamics
simulation by coupling 2D and 1D finite element models.
In: Proceedings of the Eighth Conference on ‘‘Finite Elements
in Fluids. New trends and Applications’’, Barcelona (Spain),
pp. 20–24.
D’Alpaos, L., Defina, A., 1995. Modellazione matematica del
comportamento idrodinamico di zone di barena solcate da
una rete di canali minori (Mathematical modeling of tidal
flow over salt marshes dissected by an intricate network of
channels), Istituto Veneto di SS.LL.AA., Rapporti e Studi.
XII, 353–372.
D’Alpaos, L., Defina, A., Matticchio, B., 1995. A coupled 2D
and 1D finite element model for simulating tidal flow in the
Venice channel network, In: Proceedings of the Ninth
International Conference on Finite Elements in Fluids,
Venezia, 15–21 October, pp. 1397–1406.
Defina, A., 2000a. Two dimensional shallow flow equations for
partially dry areas. Water Resources Research 36 (11),
3251–3264.
Defina, A., 2000b. Alcune considerazioni sulla modellazione
matematica di correnti bidimensionali caratterizzate da
piccoli tiranti (A note on the mathematical modeling of very
shallow flows). Atti del XXVII Convegno di Idraulica e
Costruzioni Idrauliche I, 255–262.
Defina, A., 2003. Numerical experiments on bar growth. Water
Resources Research 39 (4), 2.1–2.12.
Defina, A., 2004. Alcune considerazioni sulla stima delle
dissipazioni di energia prodotte da opere fisse in una bocca
lagunare (A note on the flow energy dissipation due to jetties
and groynes in a tidal inlet), Atti dell’Istituto Veneto di
SS.LL.AA., CLXII, II, pp. 441–478.
Defina, A., Bonetto, I., 1998. Rappresentazione dei termini di
accelerazione convettiva in un modello bidimensionale della
propagazione di onde lunghe in acque basse (Numerical
discretization of the advective terms in a Finite Element
shallow water equations model). Atti del XXVI Convegno di
Idraulica e Costruzioni Idrauliche I, 53–64.
Defina, A., Zovatto, L., 1995. Modellazione matematica delle
zone soggette a periodico prosciugamento in un bacino a
marea (Mathematical modeling of tidal flow: a new wetting
and drying algorithm), Istituto Veneto di SS.LL.AA.,
Rapporti e Studi. XII, 337–351.

ARTICLE IN PRESSL. D’Alpaos, A. Defina / Computers & Geosciences 33 (2007) 476–496496
Defina, A., D’Alpaos, L., Matticchio, B., 1994. A new set of
equations for very shallow water and partially dry areas
suitable to 2D numerical models. In: Molinaro, P., Natale, L.
(Eds.), Proceedings of the Specialty Conference on ‘‘Model-
ling of Flood Propagation Over Initially Dry Areas’’, 29
June–1 July Milan (Italy), pp. 72–81.
Falconer, R.A., Chen, Y., 1991. An improved representation of
flooding and drying and wind stress effects in a two-
dimensional tidal numerical model. In: Proceedings of the
Institution of Civil Engineers, Part 2, 659–687.
Fisher, H.B., 1973. Longitudinal dispersion and turbulent mixing
in open channel flow. Annual Review of Fluid Mechanics 8,
107–133.
Fisher, H.B., List, E.J., Koh, R.C.Y., Imberger, J., Brooks, N.H.,
1979. Mixing in Inland and Coastal Waters. Academic Press
Inc., San Diego, 483pp.
Hervouet, J.M., Janin, J.-M., 1994. Finite element algorithms for
modelling flood propagation. In: Molinaro, P and Natale, L.
(Eds.), Proceedings of the Specialty Conference on ‘‘Model-
ling of Flood Propagation Over Initially Dry Areas’’, Milan
(Italy) 29 June–1 July. American Society of Civil Engineers,
New York, pp. 101–113.
Horritt, M.S., Bates, P.D., 2001a. Predicting floodplain inunda-
tion: raster-based modelling versus the finite element
approach. Hydrological Processes 15, 825–842.
Horritt, M.S., Bates, P.D., 2001b. Effects of spatial resolution on
a raster based model of flood flow. Journal of Hydrology 253,
239–249.
Ji, Z.-G., Morton, M.R., Hamrick, J.M., 2001. Wetting and
drying simulation of estuarine processes. Estuarine, Coastal
and Shelf Science 53, 683–700.
Kawahara, M., Umetsu, T., 1986. Finite element method for
moving boundary problems in river flow. International
Journal for Numerical Methods in Fluids 6, 365–386.
King, I.P., Roig, L., 1988. Two dimensional finite element models
for floodplains and tidal flats. In: Niki, K., Kawahara, M.
(Eds.), Proceedings International Conference on Compu-
tational Methods in Flow Analysis, Okajama, Japan,
pp. 711–718.
Lanzoni, S., Seminara, G., 2002. Long term evolution and
morphodynamic equilibrium of tidal channels. Journal of
Geophysical Research 107, 1–13.
Leclerc, M., Bellemare, J.F., Dumas, G., Dhatt, G., 1990. A finite
element model of estuarine and river flows with moving
boundaries. Advances in Water Resources 13, 158–168.
Lynch, D.R., Gray, W.G., 1980. Finite element simulation of
flow in deforming regions. Journal of Computational Physics
36, 135–153.
Magistrato alle Acque di Venezia—Consorzio Venezia Nuova,
1997. Descrizione dei modelli impiegati per la valutazione
degli effetti prodotti dagli interventi per la difesa dagli
allagamenti, 2, Rapporto interno, 32pp.
Oey, L.-Y., 2005. A wetting and drying scheme for POM. Ocean
Modelling 9, 133–150.
Rastogi, A.K., Rodi, W., 1978. Prediction of heat and mass
transfer in open channels. Journal of Hydraulic Division,
American Society of Civil Engineers 104 (HY3), 397–420.
Rodi, W., 1980. Turbulence models and their application in
hydraulics. International Association of Hydraulic Engineer-
ing (IAHR) Monograph, Delft, The Nederlands, 104pp.
Smagorinsky, J., 1963. General circulation experiments with
primitive equations: 1. The basic experiment. Monthly
Weather Review 91, 99–104.
Smagorinsky, J., 1993. Some historical remarks on the use of
nonlinear viscosities. In: Galperin, B., Orszag, S.A. (Eds.),
Large Eddy Simulation of Complex Engineering and Geo-
physical Flows. Cambridge University Press, New York,
pp. 3–36.
Stansby, P.K., 2003. A mixing length model for shallow turbulent
wakes. Journal of Fluid Mechanics 495, 369–384.
Uittenbogaard, R.R., van Vossen, B., 2003. Subgrid-scale model
for quasi-2D turbulence in shallow water. In: Jirka, G.H.,
Uijttewaal, W. (Eds.), Proceedings Shallow Flows Confer-
ence, 16–18 June, Delft. pp. 575–582.
Umgiesser, G., Bergamasco, A., 1993. A staggered grid finite
element model of the Venice lagoon. In: Proceedings of VIII
International Conference on Finite Elements in Fluids, New
Trends and Applications, Barcelona, 20–23 September,
pp. 659–668.
Umgiesser, G., Canu, D.M., Cucco, A., Solidoro, C., 2004. A
finite element model for the Venice lagoon. Development, set
up, calibration and validation. Journal of Marine Science 51,
123–145.
Wilcox, D.C., 1988. Turbulence Modeling for CFD, 2nd ed.
DCW Industries, La Canada, California, 540pp.
Wilson, C.A.M.E., Bates, P.D., Hervouet, J.M., 2002. Compar-
ison of turbulence models for stage-discharge rating curve
prediction in reach-scale compound channel flows using two-
dimensional finite-element methods. Journal of Hydrology
257, 42–58.