-
8/12/2019 Math Review2
1/36
-
8/12/2019 Math Review2
2/36
R6 Continuous-Time Signals 20
R6.1 Energy and Power . . . . . . . . . . . . . . . . . . . . .
. . . 20R6.2 Continuous-Time Sinusoidal and Exponential Signals . .
. . . 20R6.2.1 Denition . . . . . . . . . . . . . . . . . . . . . .
. . . 20R6.2.2 Properties . . . . . . . . . . . . . . . . . . . . .
. . . . 21
R6.3 Continuous-Time Eigenfunction . . . . . . . . . . . . . . .
. . 22R6.4 Continuous-Time Fourier Series . . . . . . . . . . . . .
. . . . 23
R6.4.1 Denition . . . . . . . . . . . . . . . . . . . . . . . .
. 23R6.4.2 Dirichlet Conditions . . . . . . . . . . . . . . . . . .
. 25
R6.5 Continuous-Time Fourier Transform . . . . . . . . . . . . .
. . 26
R7 Discrete Fourier Series 27
R8 Matrix Algebra 29R8.1 Denition . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 29R8.2 Transpose . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . 29R8.3 Toeplitz Matrix . . . .
. . . . . . . . . . . . . . . . . . . . . . 30R8.4 Circulant Matrix
. . . . . . . . . . . . . . . . . . . . . . . . . 30R8.5
Determinant . . . . . . . . . . . . . . . . . . . . . . . . . . . .
30R8.6 Minor and Cofactor . . . . . . . . . . . . . . . . . . . . .
. . . 32R8.7 Inverse of a Matrix . . . . . . . . . . . . . . . . .
. . . . . . . 33R8.8 Unitary Matrix and Orthogonal Matrix . . . . .
. . . . . . . . 33R8.9 Cramers Rule . . . . . . . . . . . . . . . .
. . . . . . . . . . . 34
ii
-
8/12/2019 Math Review2
3/36
R1 Mathematical Formulas and Identities
R1.1 Finite and Innite Sums of Numbers 1
n
k=1
k = n(n + 1)
2 , (R1.1)
n
k=1
k2 = n(n + 1)(2 n + 1)
6 , (R1.2)
n
k=1
k3 = n2(n + 1) 2
4 , (R1.3)
k=1
1k2
= 2
6 , (R1.4)
k=1
1k4
= 4
90, (R1.5)
where n is a positive integer.
Note: The series
k=1
1
k (R1.6)
does not converge.
n 1
k=0
dk = 1 dn
1 d , (R1.7)
with d arbitrary integer and |d| = {1, 0}.
k=0
dk = 11 d
, (R1.8)
with 0 < |d| < 1.1 For test of the convergence of innite
sums, a recommended reading is Table of Inte-
grals, Series, and Products, I.S. Gradshteyn and I.M. Ryzhik, c
2000, Academic Press.
1
-
8/12/2019 Math Review2
4/36
R1.2 Power Series
Binomial Series:
(x + y)n = xn + n1 xn 1y + n2 xn 2y2 + n3 xn 3y3 + + nn 1 xyn 1
+ yn ,(R1.9)with n a positive integer.
Taylor Series:
If f (x) is an arbitrarily differentiable function, then it can
be expressed inthe form
f (x) = f (a) + f (a)(x a) + f (a)2 (x a)2 + + f
(n )(a)n!
(x a)n + ,(R1.10)
where f (a) = df (x)dx x= a , f (a) = d2 f (x)
dx 2 x= a , and f (n )(a) = d
n f (x)dx n x= a .
Exponential Series:
ex
= 1 + x +
x2
2! +
x3
3! +
x4
4! + , (R1.11)ax = 1 + x loge a +
(x loge a)2
2! +
(x loge a)3
3! + . (R1.12)
Logarithmic Series:
loge(1+ x) = x12 x2+ 13 x314 x4+ , (Region of Convergence : 1
< x < 1).(R1.13)
2
-
8/12/2019 Math Review2
5/36
Trigonometric Series:
sin x = x x3
3! +
x5
5! x7
7! + , (R1.14)
cos x = 1 x2
2! +
x4
4! x6
6! + , (R1.15)
tan x = x + x3
3 +
2x5
15 +
17x7
315 +
62x9
2835 + , (Region of Convergence : x2 <
2
4 ),(R1.16)
cot x = 1x
x3
x3
45 2x5
945 + , (Region of Convergence : 0 < |x| < ).
(R1.17)
R1.3 Factorial
n! = n(n 1)(n 2) 2 1, with n a nonnegative integer , (R1.18)0! =
(0 + 1) = 1 . (R1.19)
R1.4 Permutations and CombinationsThe number of permutations S
of n things taken k at a time, with n and k
positive integers, is given by
S = n!
(n k)!. (R1.20)
The number of combinations S of n things taken k at a time, with
n andk positive integers, is given by
S = nk = n!
k!(n k)!. (R1.21)
R1.5 Polynomial Factors and Productsxn yn = ( x y)(xn 1 + xn 2y
+ + yn 1), (R1.22)
with n a positive integer.
3
-
8/12/2019 Math Review2
6/36
xn + yn = ( x + y)(xn 1 xn 2y + xn 3y2 + yn 1), (R1.23)with n a
positive and odd integer.
N
i=1
(x + i) = ( x + 1)(x + 2) (x + N )= 0 + 1x + 2x2 + + N 1xN 1 + N
xN
(R1.24)
where
0 =
N
i=1 i , 1 =
N
i=1
0 i , 2 =
N
i= ji,j =1
0 i j , ,
N 1 = 1 + 2 + 3 + + N , N = 1 .
R1.6 Roots of Quadratic EquationThe roots x1, x2 of the
quadratic equation
ax 2 + bx + c = 0,
with a,b, and c real numbers, are given by
x1 = b + b2 4ac2a , (R1.25)x2 = b b2 4ac2a . (R1.26)
Note:
x1 + x2 = ba , (R1.27)x1x2 =
ca
. (R1.28)
R1.7 Eulers Formula
e j = cos + j sin , (R1.29)
with a real number.
4
-
8/12/2019 Math Review2
7/36
R1.8 Trigonometric Functions and Formulas
sin = 12 j (e j e j ), (R1.30)
cos = 12 (e j + e j ), (R1.31)
tan = sin cos
= (e j e j ) j (e j + e j )
, (R1.32)
cot = 1tan
= j (e j + e j )(e j e j )
, (R1.33)
csc = 1sin
= 2 j
e j e j, (R1.34)
sec = 1cos = 2e j + e j , (R1.35)
sin = cos( 2 ) = sin( ), (R1.36)cos = sin( 2 ) = cos( ),
(R1.37)tan = cot( 2 ) = tan( ), (R1.38)
sinh = 12 (e e ), (R1.39)
cosh = 12 (e + e ), (R1.40)
tanh = sinh cosh
= (e e )(e + e )
, (R1.41)
with a real number.
5
-
8/12/2019 Math Review2
8/36
sin(1 2) = sin 1 cos2 cos1 sin 2, (R1.42)cos(1 2) = cos 1 cos2
sin 1 sin 2, (R1.43)
sin2 1 sin2 2 = sin( 1 + 2) sin(1 2), (R1.44)cos2 1 cos2 2 =
sin(1 + 2) sin(1 2), (R1.45)cos2 1 sin2 2 = cos(1 + 2) cos(1 2),
(R1.46)cos2 1 + sin 2 2 = 1 (R1.47)
sin 1 sin 2 = 2 sin1 2
2 cos(1 2), (R1.48)cos 1 + cos 2 = 2 cos
1 + 2
2 cos
1 22
, (R1.49)
cos 1 cos2 = 2sin1 + 2
2 sin1 2
2, (R1.50)
sin2 = 2 sin cos , (R1.51)cos2 = cos2 sin2 , (R1.52)sin3 = 3 sin
4 sin3 , (R1.53)cos3 = 4 cos3 3 cos. (R1.54)
with , 1, and 2 real numbers.
R1.9 Newton-Raphson Method: Finding a root of apolynomial
equation
The Newton-Raphson method is a numerical technique to determine
approx-imately the root of the equation f (x) = 0. The procedure
starts from ainitial guess of the root x = x1. Then using the
recurrence relation
xn +1 = xn f (xn )f (xn )
, n = 1, 2, ,where
f (xn ) = df (x)
dx x= x n,
the successive approximations xn +1 , n 1, beginning with n = 1,
can befound. The approximation is assumed to converge when the
difference be-tween xn +1 and xn is below a prescribed small
number, typically 10 6.
6
-
8/12/2019 Math Review2
9/36
The Newton-Raphson method converges fast to the actual root if
the
initial guess of the root is close to the actual root. However,
there are threemain drawbacks: (1) The method fails when f (xn ) =
0, (2) The method doesnot always converge, and (3) The method may
converge to a root differentfrom that expected if the initial guess
x1 is far from the actual root.
Example R1.1. In this example, we would like to show how the
Newton-Raphson method is used to nd the root of f (x) = x3 3x2 + x
1 = 0.Assume the numerical resolution required is 14 decimal
digits.
We start with an initial guess of the root x1 = 2.5:
x1 = 2.5,
x2 = x1 f (x1)
f (x1) = 2.84210526315789,
x3 = x2 f (x2)f (x2)
= 2.77282691999216,
x4 = x3 f (x3)f (x3)
= 2.76930129255045,
x5 = x4 f (x4)f (x4)
= 2.76929235429601,
x6 = x5
f (x5)
f (x5) = 2.76929235423863,
x7 = x6 f (x6)f (x6)
= 2.76929235423863.
The recurrence process stops as |x7 x6| 10 15 . Hence x = x7 is
a root of f (x).
R1.10 H olders Inequality and Cauchy-SchwartzsInequality
The Holders inequality for integrals is given by
a1
a 0f (x)g(x) dx a
1
a 0 |f (x)| p dx 1/p a
1
a 0 |g(x)|q dx 1/q , (R1.55)
where1 p
+ 1q
= 1 .
7
-
8/12/2019 Math Review2
10/36
The equality holds when
f (x) = kg(x) p 1, with k any constant .
If p = q = 2, the inequality becomes Schwartzs inequality
a1
a 0f (x)g(x) dx
a1
a 0 |f (x)|2 dx
1/ 2 a1
a 0 |g(x)|2 dx
1/ 2. (R1.56)
The equality holds when
f (x) = kg(x), with k any constant .
The Holders inequality for sums is given byN
i=1
xiyi N
i=1|xi| p
1/p N
i=1|yi|q
1/q, (R1.57)
where1 p
+ 1q
= 1 .
The equality holds when
yi = kx p 1i , with k any constant .
If p = q = 2, the inequality becomes Cauchys inequality
N
i=1
xiyi N
i=1|xi|2
1/ 2 N
i=1|yi|2
1/ 2, (R1.58)
The equality holds when
yi = kx i , with k any constant .
8
-
8/12/2019 Math Review2
11/36
R2 Useful Functions1. rect function
rect( x) = 1, |x| < 120, |x| > 12.
2. sinc functionsinc(x) =
sin xx
.
3. signum function
sgn(x) =+1 , x > 00, x = 0
1, x < 0.
4. ceiling function rounds the input x towards the closest
integer largerthan or equal to x and is denoted as x .For example,
3.2 = 3.8 = 4 and 3.2 = 3.9 = 3.
5. floor function rounds the input x towards the closest integer
less thanor equal to x and is denoted as x .For example, 3.2 = 3.8
= 3 and 3.2 = 3.9 = 4.
6. median of a set of real numbers {x1, x2,...,x N } is obtained
by rankordering the numbers in the set and choosing the middle
number in theordered set.
For example, the median of {7, 13, 1, 6, 3} is 6 and the median
of {7, 13, 1, 6, 3, 9}is (6 + 7) / 2 = 6.5.7. Dirac delta function
( ) is a function of with innite height, zero
width, and unit area. It is the limiting form of a unit area
pulse function
p ( ) = 12 , < 0, elsewhere
as goes to 0, i.e.,lim 0
p ( ) d =
( ) d = 1. (R2.1)
9
-
8/12/2019 Math Review2
12/36
Equation( R2.1) also holds even when we reverse the direction of
axis
and shift ( ) by an amount t, i.e.,
(t ) d = 1. (R2.2)
Because of the above properties, we have
x( ) (t ) d = x( )| = t = x(t). (R2.3)
Equation( R2.3) holds for any value of t, and it is referred as
the sifting property of the Dirac delta function.
8. The modulo operation of integer X over integer N is the
residue of X divided by N :
X N = X kN, k = X/N .It can be veried that the modulo operation
is linear . When nega-tive numbers are used, X N has the same sign
as N . For example,67 13 = 67 5 13 = 2, 67 13 = 67 (13) (6) = 11
and
67 13 = 67 13 (6) = 11.
The statement X is congruent to Y , modulo N means that
X N = Y N .The notation
X 1 N denotes the multiplicative inverse of X evaluated modulo N
, i.e., if X 1 N = , then X N = 1. For example, 3 1 4 = 3 because3
3 4 = 1, and 8 1 5 = 2 because 8 2 5 = 1.
In the case of polynomial, the operation a(z ) mod b(z ) is the
residuer (z ) after the polynomial division a(z )/b (z ). For
example, if a(z ) =4z 3 + 2 z 2 + 5 z 1 + 1 and b(z ) = z 2 + 3 z 1
+ 4 then the residue after
the division a(z )b(z )
= 4z 1 10 + 19z 1 + 41z 2 + 3 z 1 + 4
is 19z 1 + 41 . Therefore, a(z ) mod b(z ) = r (z ) = 19z 1 + 41
.
10
-
8/12/2019 Math Review2
13/36
R3 Commonly Used Differentials andIntegrals
R3.1 Differentials
d(uv) = u dv + v du (R3.1)
d(uv
) = v du u dv
v2 (R3.2)
d(un ) = n un 1 du (R3.3)d eu = eu du (R3.4)
d au
= ( au
loge a) du (R3.5)d(loge u) = u
1 du (R3.6)d sin u = cos u du (R3.7)d cosu = sin udu. (R3.8)
R3.2 Integrals
f (g(x))g (x) dx = f (y) dy, y = g(x) and g (x) = dy/dx
(R3.9)
u dv = uv v du (R3.10) f (x) dxf (x) = loge f (x) (R3.11) dxx =
loge x (R3.12)
11
-
8/12/2019 Math Review2
14/36
xn dx = xn +1n + 1 (R3.13) ex dx = ex (R3.14) ax dx = a
x
loge a (R3.15)
abx dx = abx
bloge a (R3.16)
loge x dx = x loge x x (R3.17) sin x dx = cos x (R3.18) cosx dx
= sin x (R3.19) tan x dx = log cosx. (R3.20)
R3.3 lHopitals RuleConsider a fraction f (x)/g (x) for which at
x = x0, f (x0) = g(x0) = 0 (or
f (x0) = g(x0) = ). Thenlim
xx 0
f (x)g(x)
= limxx 0
f (x)g (x)
(R3.21)
as long as the limits on the right-hand side exist and are
nite.
R3.4 ExamplesExample R3.1. Evaluate the integral
x[n] = 1
2
X ()e jn d,
whereX () = cos(), || 00, 0 < || .
12
-
8/12/2019 Math Review2
15/36
Answer:
x[n] = 12
0
0cos()e jn d
= 12
0
0
12
(e j + e j )e jn d
= 14
0
0e j e jn d +
0
0e j e jn d
= 14
1 j ( + n)
e j ( + n )0
0+
1 j ( + n)
e j ( + n )0
0
= 14
1 j ( + n)
2 j sin( + n)0 + 1 j ( + n)2 j sin( + n)0
= sin( + n)0
2( + n) +
sin( + n)02( + n)
.
Example R3.2. Evaluate the integral
x[n] = 12
X ()e jn d,
where
X () = , || 00, 0 < || .using integration by parts.
13
-
8/12/2019 Math Review2
16/36
Answer:
x[n] = 12
0
0e jn d
= 12
1 jn
0
0e jn d( jn )
= 12
1 jn
0
0 de jn
= 12
1 jn
e jn0
0 0
0e jn d
= 1
2
1
jn0e j 0 n
(
0)e j 0 n
1
jne jn
0
0
= 12
1 jn
0(e j 0 n + e j 0 n ) 1 jn
(e j 0 n e j 0 n )=
1( jn )
0 cos(0n) 1n
sin(0n) .
14
-
8/12/2019 Math Review2
17/36
R4 Complex Numbers
R4.1 DenitionA complex number z is represented in the Cartesian
coordinate as
z = x + jy
where j = 1, and x and y are real numbers and denoted as the
realand imaginary parts of z , respectively. The complex numbers
can also berepresented in polar form as
z = |z |e j ,where |z | and are the magnitude and angle of z ,
respectively:
|z | = x2 + y2, = tan 1(yx
).
The principal value of the angle of z is given by
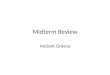
< .Figure R4.1 shows the representation of a complex number z
in the com-
plex plane. By using Euler s Formula (see Eq.(R1.29)) we can nd
therepresentation of a complex number in Cartesian form from its
polar form:
x = |z |cos , y = |z |sin .It should be pointed out here that
negative real numbers have angle
= (2 k + 1)
with k any integer.
Example R4.1. Let z = 2 + j 3, we can express it in polar form
bycalculating its magnitude and angle:
|z | = 22 + 3 = 7, = tan 1( 32 ).Therefore,
z = 2 + j 3 = 7e j tan 1 ( 32 ).15
-
8/12/2019 Math Review2
18/36
Figure R4.1: Representation of a complex number z in Cartesian
form andpolar form.
The conjugate of a complex number in Cartesian form is obtained
bynegating the imaginary part:
z = ( x + jy )= x+ ( jy )= x jy.In polar form, the conjugate is
obtained by changing the sign of the angle:
z = ( re j )= r e j .
R4.2 Complex Arithmetic(1) Addition and Subtraction
z 1 = x1 + jy1 and z 2 = x2 + jy2 be two complex numbers.
Then
z 1 + z 2 = ( x1 + x2) + j (y1 + y2)
where (x1 + x2) are (y1 + y2) are the real and imaginary parts
of the sum
z 1 + z 2, respectively. Similarly,z 1 z 2 = ( x1 x2) + j (y1
y2)
where (x1 x2) are (y1y2) are the real and imaginary parts of the
differencez 1 z 2, respectively.16
-
8/12/2019 Math Review2
19/36
Example R4.2. Let z 1 = 1.3 + j 5.2 and z 2 = 2.7 j 3.6 thenz 1
+ z 2 = (1 .3 + j 5.2) + (2 .7 j 3.6) = 4 + j 1.6z 1 z 2 = (1 .3 +
j 5.2) (2.7 j 3.6) = 1.4 + 8.8 j.
(2) Multiplication
Let z 1 = x1 + jy 1 and z 2 = x2 + jy 2 then
z 1 z 2 = ( x1 + jy 1)(x2 + jy 2)= x1x2 + jx 1y2 + jx 2y1 + j
2y1y2= ( x1x2 y1y2) + j (x1y2 + x2y1).
Example R4.3. Let z 1 = 1 + j 3, z 2 = 2
j 2. The product of z 1, z 2calculated in polar form is given
by
(1 + j 3)(2 j 2) = 2e j/ 3 2 2e j/ 4 = 4 2e j/ 12 = 5 .4641 + j
1.4641.Calculating in the Cartesian form we get
(1 + j 3)(2 j 2) = (2 + 2 3) + j (2 3 2) = 5.4641 + j 1.4641.(3)
Division
The division of two complex numbers z 0 and z 1 can be carried
out either inpolar form or in Cartesian form. In the former
case
w = z 0z 1 =
r0e j 0
r 1e j 1 = r0r 1 e j (
0
1
) .
In the latter case
w = z 0z 1
= x0 + jy 0x1 + jy 1
= (x0 + jy 0)(x1 jy 1)(x1 + jy 1)(x1 jy 1)
= (x0x1 + y0y1) + j (x1y0 x0y1)
x21 + y21.
Example R4.4. To divide 2 + j 2 by 1 j , we calculate in polar
form asfollows:2 + j 2
1 j =
2 2e j 4
2e j 4
= 2 e j (4 ) (
4 ) = 2 e j
2 = j 2.
Calculating in the Cartesian form we get2 + j 21 j
= (2 + j 2)(1 + j )
(1 j )(1 + j ) =
(2 2) + j (2 + 2)12 + 1 2
= j 2.
17
-
8/12/2019 Math Review2
20/36
(4) Inverse
The inverse of a complex number is a special case of division
where thenumerator is 1. In polar form we have
z 1 = 1z
= 1re j
= 1r
e j .
Equivalently, in the Cartesian form we have
z 1 = 1z
= 1
x + jy =
x jy(x + jy )(x jy )
= x jyx2 + y2
.
R5 Complex Variables
R5.1 Function of a Complex VariableA function of the complex
variable z can be written as
f (z ) = u(z ) + jv (z )
where u(z ) and v(z ) are real functions of z . In the Cartesian
form, we denez = x + jy for real x and y. Therefore, the values of
u(z ) and v(z ) dependon x and y, and we can express the complex
function f (z ) as
f (z ) = u(x, y) + jv (x, y).
If z = re j , then f (z ) can be expressed as
f (z ) = u(r, ) + jv (r, ),where u(r, ) and v(r, ) are the real
and imaginary parts of f (z ).
R5.2 Analytic Function of a Complex VariableDenition R5.1. A
function f (z ) is said to be differentiable at a point z 0in the z
-plane if the limit
f (z 0) = limz0
f (z 0 + z ) f (z 0)z
exists. Note that f (z 0 + z ) can approach f (z
0) along any path. This limit
is called the derivative of f (z ) at point z 0.Denition R5.2. A
function f (z ) of a complex variable z is analytic in theregion R
in the complex z -plane if and only if all the derivatives of f (z
) existat all points inside the region R.
18
-
8/12/2019 Math Review2
21/36
R5.3 Analytic Continuation
If the values of a function f (z ) of a complex variable are
known everywhereon a closed contour C inside a region R where f (z
) is analytic, then thevalues of f (z ) at all points in R can be
found by mapping from the contourC to any point in R.
R5.4 Cauchys Integral FormulaIf a function f (z ) is analytic
both on and inside a counterclockwise closedcontour C and if z 0 is
any point inside C , then
f (z 0) = 1
2j C f (z )
1
z z 0dz, (R5.1)
f (z 0) = 12j C f (z ) 1(z z 0)2 dz (R5.2)
f (z 0) = 22j C f (z ) 1(z z 0)3 dz (R5.3)... (R5.4)
f (n )(z 0) = n!2j C f (z ) 1(z z 0)n +1 dz. (R5.5)
where f (z 0) = d f (z)dzz= z0
, f (z 0) = d2 f (z)dz 2
z= z0, and f (n )(z 0) = d
n f (z)dz n
z= z0.
Eq.( R5.1) is often referred as the Cauchys integral
formula.
By combining Eq.( R5.1) - Eq.(R5.5) we arrive at an useful
relation:
12j C z k 1 dz = 1 , k = 00 , k = 0 (R5.6)
where C is a counterclockwise closed contour encircling z =
0.
R5.5 Cauchys Residue TheoremIf a function f (z ) is analytic
both on and inside a counterclockwise closedcontour C except at
poles z k , k = 1, 2,...,n , then
12j C f (z ) dz = k residue of f (z ) at pole z k inside C .
(R5.7)
19
-
8/12/2019 Math Review2
22/36
In the case when f (z ) is a rational function of z and has pole
at z = z k
of multiplicity m, we can express f (z ) as
f (z ) = (z )(z z k)m
,
where (z ) does not have any pole at z = z k . Thus the residue
of f (z ) atthe pole z k inside C is given by
1(m 1)!
dm 1(z )d z m 1 z= zk
. (R5.8)
R6 Continuous-Time SignalsR6.1 Energy and PowerThe total energy
of a continuous-time signal x(t) is given by
E x = limT
T
T |x(t)|2 dt.
The average power of a continuous-time x(t) is given by
P x = limT 1
2T T
T |x(t)|2
dt.
The denition of total energy can explained as the area under the
squaredsignal |x(t)|2, and it is a measurement of the strength of
the signal x(t) overinnite time. However, there are signals with
innite energy so we needto evaluate the average power of the signal
x(t) as a measurement of thestrength over one unit time.
R6.2 Continuous-Time Sinusoidal and Exponential Sig-nals
R6.2.1 Denition
The continuous-time real sinusoidal signal with constant
amplitude is of the form
x(t) = A cos(0t + ), (R6.1)
20
-
8/12/2019 Math Review2
23/36
where A, 0 and are real numbers. The parameters A, 0 and are
called,
respectively, the amplitude , the angular frequency , and the
phase of thesinusoidal signal x(t).The complex exponential signal
is expressed in the form
x(t) = A t , (R6.2)
where
= e0 + j 0 , A = |A|e j . (R6.3)If A and are both real, the
signal of Eq. ( R6.2) reduces to real
exponential signal . For t
0 such a signal with
|
| < 1 decays expo-
nentially as t increases and with || > 1 grows exponentially
as t increases.In addition, we can rewrite Eq. ( R6.2) as
x(t) = Ae(0 + j 0 )t = |A|e0 t e j ( 0 t+ ) (R6.4)= |A|e0 t
cos(0t + ) + j |A|e0 t sin(0t + ). (R6.5)
Thus the real and imaginary parts of a complex exponential
signal are realsinusoidal signals.
The fundamental period T 0 of a complex exponential signal (Eq.
( R6.4))with
0 = 0 is dened to be the smallest positive T
0 satisfying
|A|e j (0 t+ ) = |A|e j (0 (t+ T 0 )+ ) , (R6.6)or
equivalently,
e j 0 T 0 = 1 . (R6.7)
Therefore,T 0 =
2
|0|. (R6.8)
R6.2.2 Properties
The properties of continuous-time sinusoidal and exponential
signals andcomparisons with discrete-time sinusoidal and
exponential sequences are dis-cussed as follows.
21
-
8/12/2019 Math Review2
24/36
1. Periodicity for any choice of 0
Note that the continuous-time sinusoidal signal A cos(0t + )
(Eq.(R6.1)) and the continuous-time complex exponential signal |A|e
j (0 t+ )are periodic signals of any choice of 0. However,
discrete-time se-quences are not always periodic with any choice of
0. Discrete si-nusoidal sequence A cos(0n + ) and discrete complex
exponential se-quence |A|e j (0 n + ) are periodic with period N
only if 0N is an integermultiple of 2, i.e., 0N = 2r where N and r
are positive integers.For example, cos( n4 ) is a periodic sequence
while cos(
n4 ) is not periodic.
2. Distinctness for different 0, 1Any two continuous-time
sinusoidal signals
A cos(0t + ), A cos(1t + ), 0 = 1have different waveforms.
Similarly, any two continuous-time exponen-tial signals with 0 = 1
also have different waveforms. Unlike thecontinuous-time case,
discrete-time sinusoidal sequences
A cos(0n + ), A cos(1n + ), 0 = 1 + 2 k
have the same sequence values. Similarly, any two discrete-time
ex-ponential sequences with 0 = 1 + 2k also have the same
sequence
values.
R6.3 Continuous-Time EigenfunctionIf the input signal of any LTI
system has output signal being the input signalmultiplied by a
complex constant, this certain type of input signal is calledthe
eigenfunction and the complex constant is called the eigenvalue
.
Example R6.1. We want to show that the complex exponential
signal de-ned in Eq. (R6.2)
x(t) = A t
is an eigenfunction of an LTI continuous-time system with an
impulse re-sponse h(t).
22
-
8/12/2019 Math Review2
25/36
By using the convolution integral, we have
y(t) = h( )A (t ) d =
h( ) d A t .
Since the integral inside the brackets is independent of t, we
can thereforesay that the input signal A t is an eigenfunction.
Example R6.2. We want to show that the sum of any two complex
expo-nential signals
x(t) = A t + B t
is not an eigenfunction of an LTI continuous-time system with an
impulseresponse h(t).
By using the convolution integral, we have
y(t) =
h( ) A (t ) + B (t ) d
=
h( ) d A t +
h( ) d B t .
Since the input signal x(t) cannot be extracted from the
summation above,we can therefore say that the input signal A t + B
t is not an eigenfunction.
R6.4 Continuous-Time Fourier SeriesR6.4.1 Denition
Given a periodic continuous-time signal x(t) with period T 0 and
fundamentalfrequency 0 = 2/T 0, the Fourier series expansion of
x(t) is given by thelinear combination of the set of harmonically
related complex exponentials
e jk 0 t = e jk2 T 0
t , k = 0, 1, 2,...,i.e.,
x(t) =
k=
ake jk 0 t =
k=
ake jk 2 T 0 t (R6.9)
ak = 1T 0 T 0 x(t)e jk 0 t dt = 1T 0 T 0 x(t)e jk
2 T 0
t dt. (R6.10)
23
-
8/12/2019 Math Review2
26/36
Note that the notation
T 0 denotes the integration over any interval of
length T 0. The Eq.( R6.9) is referred to as the synthesis
equation and theEq.( R6.10) is referred to as the analysis
equation. The coefficient ak is calledthe Fourier series
coefficient .
Table R6.1: Properties of Continuous-Time Fourier Series.
Type of Periodic Signal with Fourier SeriesProperty frequency 0
= 2/T Coefficients
g(t) akh(t) bk
Linearity g(t) + h (t) a k + bkTime Shifting g(t t0) ake jk 0 t
0
Frequency Shifting e jM 0 t g(t) ak M Multiplication
g(t)h(t)
l= a lbk l
Time Reversal g(t) a kConjugation g(t) a kTime Scaling g(t ),
> 0 ak
Periodic Convolution
T g( )h(t
) d Takbk
Example R6.3. Find the Fourier series coefficients of the
continuous-timesignal
x(t) = 1 + cos( 0t) + 2 cos(20t + 3
) + 4 sin(30t 4
)
with fundamental frequency 0.By using the Eulers Formula, it can
be shown that
x(t) = 1 + 12(e
j 0 t
+ e j 0 t
) + 22(e
j (2 0 t+ 3 )
+ e j (2 0 t+ 3 )
) + 42 j (e
j (3 0 t 4 )
e j (3 0 t 4 )
)
= 1 + 12
e j 0 t + 12
e j 0 t + e j3 e j 20 t + e j
3 e j 20 t +
2 j
e j4 e j 30 t
2 j
e j4 e j 30 t .
Therefore, the Fourier series coefficients are
24
-
8/12/2019 Math Review2
27/36
a0 = 1,
a1 = 12
, a 1 = 12
,
a2 = e j3 =
1 + j 32
, a 2 = e j3 =
1 j 32
,
a3 = 2 j
e j4 = 2(1 j ), a 3 =
2 j
e j4 = 2(1 + j ),
ak = 0, |k| > 3.Example R6.4. Find the Fourier series
coefficients of the impulse train
x(t) =
k=
(t kT 0)
with period T 0.By calculating Eq.( R6.10) in the interval T 0/
2 t T 0/ 2, we can get
ak = 1T 0
T 0 / 2
T 0 / 2 (t)e jk
2 T 0
t dt = 1T 0
.
Therefore, all the Fourier series coefficients of the impulse
train have thesame value 1/T 0.
Some important properties of continuous-time Fourier series are
listed inTable R6.1 for quick reference.
R6.4.2 Dirichlet Conditions
In order to verify the existence of Fourier series
representation for a peri-odic signal x(t), we need to examine the
Dirichlet conditions. The Dirichletconditions are given by:
1. x(t) must be absolutely integrable, i.e.,
T 0 |x(t)|dt < 25
-
8/12/2019 Math Review2
28/36
2. In any nite interval of time, x(t) has a nite number of local
maxima
and local minima.3. In any nite interval of time, x(t) has a
nite number of discontinuities.
The Dirichlet conditions guarantee that x(t) equals its Fourier
series rep-resentation
k=
ake jk 0 t
at all values of t except at discontinuities of x(t). Note that
Dirichlet condi-tions are only sufficient but not necessary
conditions.
R6.5 Continuous-Time Fourier TransformGiven an aperiodic
continuous-time signal x(t), the continuous-time Fouriertransform
of x(t) is given by
X ( j) =
x(t)e j t dt (R6.11)
x(t) = 12
X ( j)e j t d. (R6.12)
The transform X ( j ) is referred to as the spectrum of x(t)
because it pro-vides the information of x(t) when evaluated by
complex exponential signalsat different frequencies.
Some important properties of continuous-time Fourier transform
are listedin Table R6.2 for quick reference.
26
-
8/12/2019 Math Review2
29/36
Table R6.2: Properties of Continuous-Time Fourier Transform.
Property Signal Fourier Transformg(t) G( j )h(t) H ( j )
Linearity g(t) + h (t) G( j ) + H ( j )Time Shifting g(t t0) G(
j)e j t 0
Frequency Shifting e j 0 t g(t) G( j ( 0))Multiplication
g(t)h(t) 12 G( j)
H ( j )
Time Reversal g(t) G( j )Conjugation g(t) G( j )Time Scaling g(t
) 1| | G
j
Convolution g(t) h(t) G( j )H ( j )Differentiation in Time dd t
g(t) j G( j)
Integration t
g( ) d 1
j G( j ) + G(0) ()Real and Even in Time g(t) real and even G( j
) real and evenReal and Odd in Time g(t) real and odd G( j ) purely
imaginary and odd
R7 Discrete Fourier SeriesGiven a periodic sequence x[n] with
period N , the fundamental period isdened to be the smallest
integer N such that x[n] = x[n + N ] is satised,and the fundamental
frequency is dened to be 0 = 2/N . The harmonicsare sequences whose
frequencies are integer multiples of the fundamentalfrequency. For
discrete complex exponential signals, the k th harmonic isexpressed
as
e jk 0 n = e jk2 N n , k = 0, 1, 2, .
Note that there are only N distinct harmonics for discrete
complex ex-ponential signals with fundamental frequency 0 = 2/N
because every twosignals with frequencies which differ in 2m have
the same waveform, i.e,
e jk (0 +2 m )n = e jk (2 N +2 m )n = e jk (
2 N )n e jk 2mn = e jk (
2 N )n .
27
-
8/12/2019 Math Review2
30/36
The discrete Fourier series expansion of periodic signal x[n] is
the expres-
sion in form of a linearly weighted combination of a fundamental
and a seriesof harmonic complex exponential signals.
x[n] =N 1
k=0
ake jk 0 n =N 1
k=0
ake jk2 N n ,
where
ak = 1N
N 1
n =0
x[n]e jk 0 n = 1N
N 1
n =0
x[n]e jk2 N n .
Example R7.1. Calculate the Fourier series coefficients ak for
the followingperiodic signal
{x[n]} = {..., 1, 1, 1, 1, 0, 0,...}.
We can observe that N = 6 so
ak = 165n =0 x[n]e
jk ( 2 6 )6
= 16 (e jk ( 2 6 )0 + e jk (
2 6 )1 + e jk (
2 6 )2 + e jk (
2 6 )3 + 0 + 0)
= 16 (1 + e jk 3 + e jk
2 3 + e jk )
= 16 (1 + e jk 3 + (1)ke jk
3 + (1)k).
Example R7.2. Calculate signal x[n] from the following Fourier
series co-
efficients ak
{ak} = {..., 1/ 4, 1/ 2, 1, 1/ 2, 1/ 4, 0, 1/ 4, 1/ 2, 1, 1/
2...}. .
We can observe that N = 6 so
x[n] =k=
ake jk2
6 n = 1 + 12
e j2
6 n + 14
e j2
6 2n + 0 + 14
e j2
6 4n + 12
e j2
6 5n
= 1 + 12
e jn
3 + 14
e j2 n
3 + 0 + 14
e j4 n
3 + 12
e j5 n
3
= 1 + 1
2e j
n3 +
1
4e j
2 n3 + 0 +
1
4e j (2n
2 n3 ) +
1
2e j (2n
n3 )
= 1 + 12
e jn
3 + 14
e j2 n
3 + 0 + 14
e j2 n
3 + 12
e jn
3
= 1 + cos(n3
) + 12
cos(2n
3 ).
28
-
8/12/2019 Math Review2
31/36
R8 Matrix Algebra
R8.1 DenitionA matrix is a rectangular array of real or complex
numbers enclosed in brack-ets; for instance,
3 41 2 ,
3 5 62 1 3
,3 j 5
2 4 j 1 + j7 5 3 j.
A matrix with K rows and M columns is called a K M matrix.
Forexample, the matrix1 0 00 1 00 0 1
is a 3 3 matrix. The matrix1 42 6
3 j 11 + j 1is a 4
2 matrix. The matrix
U =
a11 a12 a1M a21 a22 a2M ... ... . . . ...aK 1 aK 2 aKM
(R8.1)
is a K M matrix and the number ars , r = 1, 2,..., K , and s =
1, 2,..., M is called the entry of U.
R8.2 TransposeThe transpose, UT , of a K M matrix U is the M K
matrix formed byinterchanging the rows and columns of U . For
example, the transpose of the
29
-
8/12/2019 Math Review2
32/36
matrix U given in Eq.(R8.1) is a M K matrix given by
U T =
a11 a21 aK 1a12 a22 aK 2... ... .. . ...a1M a2M aKM
. (R8.2)
R8.3 Toeplitz MatrixThe N N matrix U is a Toeplitz matrix if all
entries along the line parallelto the main diagonal are the same.
For example,
U =a0 a 1 a 2 a 3a1 a0 a 1 a 2a2 a1 a0 a 1a3 a2 a1 a0
is a 4 4 Toeplitz matrix.
R8.4 Circulant MatrixThe N N matrix U is a circulant matrix if
each row equals the right circularshift of the previous row by one
entry. For example,
U =
a0 a1 a2 a3a3 a0 a1 a2a2 a3 a0 a1a1 a2 a3 a0
is a 4 4 Circulant matrix.
R8.5 DeterminantIf the 2 2 matrix U is
U = a11 a12a21 a22 , (R8.3)
then the determinant of the U is given by
det( U ) = a11a22 a12a21 . (R8.4)30
-
8/12/2019 Math Review2
33/36
Example R8.1. The determinant of the matrix
U = 3 41 2
is det(U ) = 3 2 4 1 = 6 4 = 2.If the 3 3 matrix U is
U =a11 a12 a13a21 a22 a23a31 a32 a33
, (R8.5)
then the determinant of U is given by
det( U ) = a11 a22a33 + a21a32a13 + a12a23a31 a13a22a31
a11a32a23 a12a21a33 .(R8.6)Example R8.2. The determinant of the
matrix
1 4 62 1 34 5 2
is
det( U ) = 1
1
(
2) + 2
5
(
6) + 4
3
4
(
6)
1
4
1
5
3
4
2
(
2)
= ( 2) + ( 60) + 48 (24) 15 (16) = 11 .If the N N matrix U
is
U =
a11 a12 a1N a21 a22 a2N ... ... . . . ...aN 1 aN 2 aNN
, (R8.7)
then the determinant of U is
det( U ) = ar 1(1)r +1 M r 1 + ar 2(1)r +2 M r 2 + + a rN (1)r +
N M rN (R8.8)= a1s (1)1+ sM 1s + a2s (1)2+ s M 2s + + aNs (1)N + sM
Ns (R8.9)where r, s = 1 or 2 or 3 , or N and M rs is the minor of
ars (see SectionR8.6).
31
-
8/12/2019 Math Review2
34/36
Example R8.3. To calculate the determinant of the matrix
U =
1 6 4 67 1 3 62 3 6 52 4 2 6
, (R8.10)
we rst calculate the minors
M 11 =1 3 63 6 54 2 6
= 320, M 12 =7 3 62 6 52 2 6
= 344
M 13 = 7 1
6
2 3 52 4 6
= 232, M 14 = 7 1 3
2 3 62 4 2
= 200.
The determinant is therefore given by
det( U ) = 1 (1)1+1 320 + 6 (1)1+2 (344) + (4) (1)1+3 232 + 6
(1)1+4 200= 320 + 2064 928 1200 = 256.
R8.6 Minor and Cofactor
From U given in Eq.(R8.7), the minor M rs of ars in U is dened
to be thedeterminant of the ( N 1)(N 1) matrix formed by deleting
the r -th rowand s-th column of U . For example,
M 11 =
a22 a23 a2N a32 a33 a3N ... ... . . . ...aN 2 aN 3 aNN
, M 12 =
a21 a23 a2N a31 a33 a3N ... ... . . . ...aN 1 aN 3 aNN
.
The cofactor C rs of ars in U given in Eq.(R8.7) is dened to
be
C rs = (1)r + sM rs . (R8.11)
32
-
8/12/2019 Math Review2
35/36
R8.7 Inverse of a Matrix
By Eq.(R8.7), if det(U ) = 0, then the inverse of U exists and
is uniquelygiven by
U 1 = 1
det( U )
C 11 C 21 C N 1C 12 C 22 C N 2... ... . . . ...C 1N C 2N C
NN
, (R8.12)
where C rs = (1)r + s M rs is the cofactor of a rs in U given in
Eq.(R8.7).Example R8.4. In this example we want to nd the inverse
of the matrixgiven in Eq.(R8.10). The cofactors are calculated as
follows:
C 11 = (1)1+1 M 11 = 320, C 12 = (1)1+2 M 12 = 344,C 13 = (1)1+3
M 13 = 232, C 14 = (1)1+4 M 14 = 200C 21 = (1)2+1 M 21 = 176, C 22
= (1)2+2 M 22 = 210,C 23 = (1)2+3 M 23 = 158, C 24 = (1)2+4 M 24 =
134C 31 = (1)3+1 M 31 = 240, C 32 = (1)3+2 M 32 = 234,C 33 = (1)3+3
M 33 = 198, C 34 = (1)3+4 M 24 = 142C 41 = (1)4+1 M 41 = 344, C 42
= (1)4+2 M 42 = 329,C 43 = (1)4+3 M 43 = 239, C 44 = (1)4+4 M 44 =
227.
Therefore, the inverse is
U 1 = 1256
320 176 240 344344 210 234 329232 158 198 239200 134 142 227
.
R8.8 Unitary Matrix and Orthogonal MatrixThe N N matrix U is
said to be unitary if
U H U = UU H = kI, (R8.13)
where k is any nonzero constant and U H = ( U T ) is the
conjugate-transposeof U. Note that the unitary matrix is always
invertible and U H = U 1.
33
-
8/12/2019 Math Review2
36/36
A real unitary matrix U is also called an orthogonal matrix,
i.e.,
U T U = UU T = kI, (R8.14)where k is any nonzero constant and UT
is the transpose of U. Similarly,the orthogonal matrix is always
invertible and UH = U 1. If k = 1, thenthe matrix U is said to be
orthonormal.
R8.9 Cramers RuleConsider the set of N linear equations
a11x1 + a12x2 + + a1N xN = b1,a
21x
1 + a
22x
2 +
+ a
2N x
N = b
2,
...aN 1x1 + aN 2x2 + + aNN xN = bN ,
(R8.15)
writing in matrix form yields
a11 a12 a1N a21 a22 a2N ... ... .. . ...aN 1 aN 2 aNN
x1x2...
xN
=
b1b2...
bN
. (R8.16)
Let D be the determinant of the coefficient matrix
D =
a11 a12 a1N a21 a22 a2N ... ... . . . ...aN 1 aN 2 aNN
. (R8.17)
If D = 0, then the system( R8.15) has the unique solutionx1
=
D1D
, x2 = D2D
, , xN = DN
D , (R8.18)
where
D1 =b1 a12 a1N b2 a22 a2N ... ... . . . ...bN aN 2 aNN
, D 2 =a11 b1 a1N a21 b2 a2N ... ... . . . ...aN 1 bN aNN
, , etc.
34