Embed Size (px)
Citation preview
Math 2C03 - Differential EquationsSlides shown in class - Winter 2015
Feb. 24-26, 2015
Spring/Mass Systems
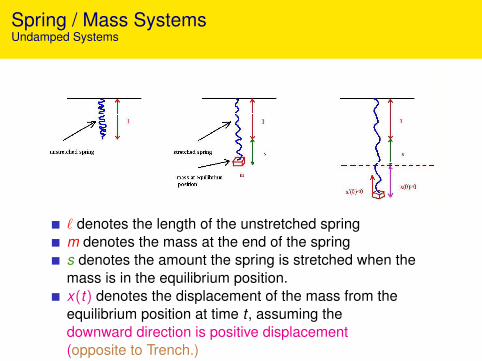
Spring / Mass SystemsUndamped Systems
` denotes the length of the unstretched springm denotes the mass at the end of the springs denotes the amount the spring is stretched when themass is in the equilibrium position.x(t) denotes the displacement of the mass from theequilibrium position at time t , assuming thedownward direction is positive displacement(opposite to Trench.)
g denotes acceleration due to gravity at the Earth’ssurface:
g = 9.81 meters/sec2 = 32 feet/sec2.W denotes weight: W = mg
Hooke’s Law: Force due to the stiffness of the spring actsupward and is proportional to the amount of elongation.
F = −k(x + s),is the restoring force where k is the spring constant
At equilibrium, x = 0, forces balance: mg = ks.
Newton’s Second Law: ma = Fwhere a = x ′′(t) denotes acceleration.
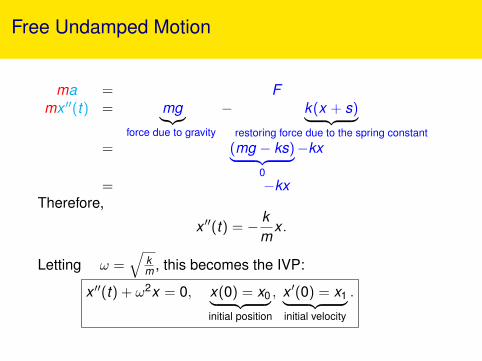
Free Undamped Motion
ma = Fmx ′′(t) = mg︸︷︷︸
force due to gravity
− k(x + s)︸ ︷︷ ︸restoring force due to the spring constant
= (mg − ks)︸ ︷︷ ︸0
−kx
= −kxTherefore,
x ′′(t) = − km
x .
Letting ω =√
km , this becomes the IVP:
x ′′(t) + ω2x = 0, x(0) = x0︸ ︷︷ ︸initial position
, x ′(0) = x1︸ ︷︷ ︸initial velocity
.
Free Undamped Motion, cont’d
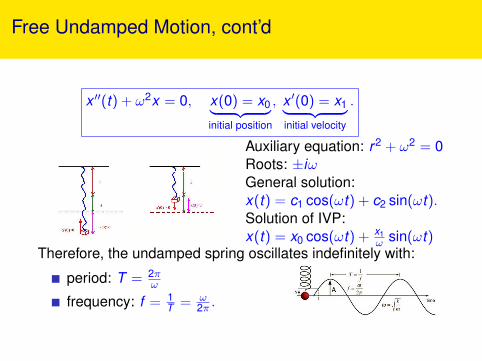
x ′′(t) + ω2x = 0, x(0) = x0︸ ︷︷ ︸initial position
, x ′(0) = x1︸ ︷︷ ︸initial velocity
.
Auxiliary equation: r2 + ω2 = 0Roots: ±iωGeneral solution:x(t) = c1 cos(ωt) + c2 sin(ωt).Solution of IVP:x(t) = x0 cos(ωt) + x1
ω sin(ωt)Therefore, the undamped spring oscillates indefinitely with:
period: T = 2πω
frequency: f = 1T = ω
2π .
Free Undamped Motion, cont’d
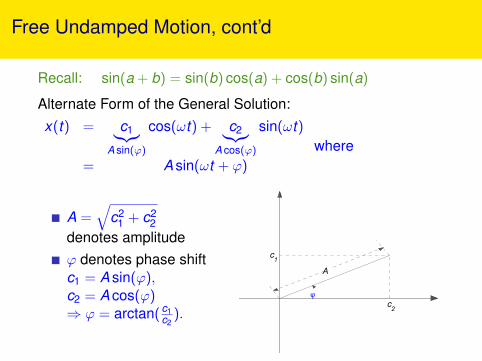
Recall: sin(a + b) = sin(b) cos(a) + cos(b) sin(a)
Alternate Form of the General Solution:x(t) = c1︸︷︷︸
A sin(ϕ)
cos(ωt) + c2︸︷︷︸A cos(ϕ)
sin(ωt)
= A sin(ωt + ϕ)
where
A =√
c21 + c2
2denotes amplitudeϕ denotes phase shiftc1 = A sin(ϕ),c2 = A cos(ϕ)⇒ ϕ = arctan(c1
c2).
272 Chapter 6 Applications of Linear Second Order Equations
φc2
c1
A
Figure 6.1.5 R =√
c21 + c2
2; c1 = R cosφ; c2 = R sin φ
angle φ in (6.1.10) is the phase angle. It’s measured in radians. Equation (6.1.10) is the amplitude–phase
form of the displacement. If t is in seconds then ω0 is in radians per second (rad/s); it’s the frequency of
the motion. It is also called the natural frequency of the spring–mass system without damping.
Example 6.1.2 We found the displacement of the object in Example 6.1.1 to be
y =3
2cos 8t− 3
8sin8t.
Find the frequency, period, amplitude, and phase angle of the motion.
Solution The frequency is ω0 = 8 rad/s, and the period is T = 2π/ω0 = π/4 s. Since c1 = 3/2 and
c2 = −3/8, the amplitude is
R =√
c21 + c2
2 =
√(3
2
)2
+
(3
8
)2
=3
8
√17.
The phase angle is determined by
cosφ =32
38
√17
=4√17
(6.1.11)
and
sin φ =−3
838
√17
= − 1√17
. (6.1.12)
Using a calculator, we see from (6.1.11) that
φ ≈ ±.245 rad.
Free Undamped Motion, cont’dSpring Question 1:
At equilibrium a 10 kg mass is stretched 70 cm. Suppose a 2kg mass is attached to the spring, is initially displaced 25 cmbelow equilibrium, and is given an upward velocity of 2 m/s.Find:
(i) the displacement x(t) for t > 0;(ii) period, T ;(iii) frequency, f = 1
T ;(iv) amplitude, A; and(v) phase angle of the motion, ϕ.
BEWARE: In class, in WeBWork, and on any tests, we areassuming that the downward direction is the positive direction,opposite to what is assumed in Trench.
Therefore, x(0) > 0 & x ′(0) < 0, in this question.
Damped Systems: Effects of air resistance, friction
The damping force is proportional to the velocity.
Damping Force = −βdxdt, (β > 0)
The minus sign indicates that the force acts in thedirection opposite to the motion.
By Newton’s Second Law:
md2xdt2 = −k x − β dx
dt
d2xdt2 +
β
m︸︷︷︸2λ
dxdt
+km︸︷︷︸ω2
x = 0
Damped Systems, cont’d
d2xdt2 + 2λ
dxdt
+ ω2 x = 0.
where λ = β2m & ω =
√km
Auxiliary equation: r2 + 2λ r + ω2 = 0
Roots: r± = −λ±√λ2 − ω2.
Case 1 (Overdamped): λ2 − ω2 > 0Case 2 (Critically damped): λ2 − ω2 = 0Case 3 (Underdamped): λ2 − ω2 < 0
Undamped if λ = 0. (Simple harmonic motion)
Note: If damped, then λ 6= 0 and the roots are either real andnegative or the real part of the roots is always negative.
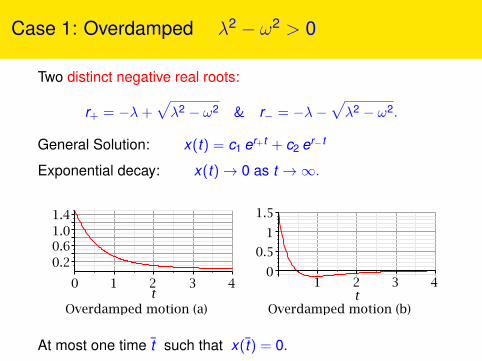
Case 1: Overdamped λ2 − ω2 > 0
Two distinct negative real roots:
r+ = −λ+√λ2 − ω2 & r− = −λ−
√λ2 − ω2.
General Solution: x(t) = c1 er+t + c2 er−t
Exponential decay: x(t)→ 0 as t →∞.
At most one time t̄ such that x (̄t) = 0.
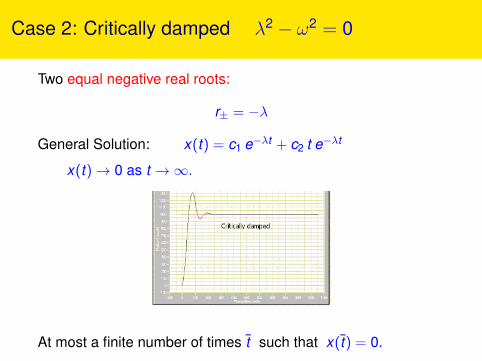
Case 2: Critically damped λ2 − ω2 = 0
Two equal negative real roots:
r± = −λ
General Solution: x(t) = c1 e−λt + c2 t e−λt
x(t)→ 0 as t →∞.
Page 1 of 1
18/02/2015file:///C:/Users/hwolkowi/Desktop/d92874b41019.gif
At most a finite number of times t̄ such that x (̄t) = 0.
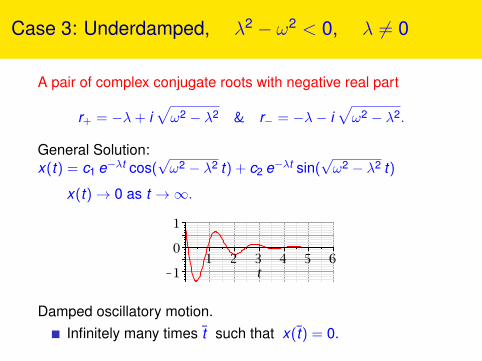
Case 3: Underdamped, λ2 − ω2 < 0, λ 6= 0
A pair of complex conjugate roots with negative real part
r+ = −λ+ i√ω2 − λ2 & r− = −λ− i
√ω2 − λ2.
General Solution:x(t) = c1 e−λt cos(
√ω2 − λ2 t) + c2 e−λt sin(
√ω2 − λ2 t)
x(t)→ 0 as t →∞.
Damped oscillatory motion.Infinitely many times t̄ such that x (̄t) = 0.
Driven Motion, i.e., external forcing
Assume an external force, f (t), also acts on the mass m of aspring/mass system.
md2xdt2 = −k x − β dx
dt+ f (t)︸︷︷︸
external force
.
Can re-write:d2xdt2 +
β
mdxdt
+km
x =f (t)m
.
General soluton of the form:
ygen(t) = yc(t)︸ ︷︷ ︸transient
+ yp(t)︸ ︷︷ ︸steady state
if β 6= 0, transient part dies off, i.e., yc(t)→ 0 as t →∞whether yp(t) oscillates or not depends on the form of theexternal forcing
Undamped External Forcing
Assume an external force, f (t), also acts on the mass m of aspring/mass system with no friction.
md2xdt2 = −k x + f (t)︸︷︷︸
external force
.
Example (Undamped with external sinusoidal forcing)
d2xdt2 + ω2 x = P sin(αt)︸ ︷︷ ︸
f (t)/m
,
where ω =√
km , β = 0
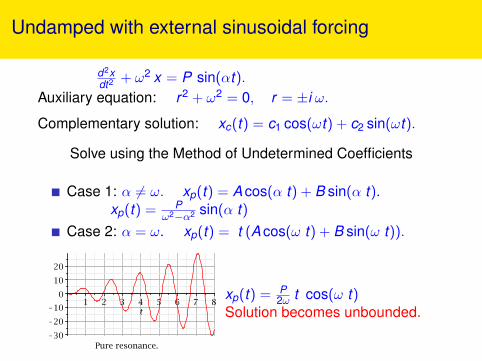
Undamped with external sinusoidal forcing
d2xdt2 + ω2 x = P sin(αt).
Auxiliary equation: r2 + ω2 = 0, r = ±i ω.
Complementary solution: xc(t) = c1 cos(ωt) + c2 sin(ωt).
Solve using the Method of Undetermined Coefficients
Case 1: α 6= ω. xp(t) = A cos(α t) + B sin(α t).xp(t) = P
ω2−α2 sin(α t)Case 2: α = ω. xp(t) = t (A cos(ω t) + B sin(ω t)).
xp(t) = P2ω t cos(ω t)
Solution becomes unbounded.