Embed Size (px)
Citation preview

1542 IEEE GEOSCIENCE AND REMOTE SENSING LETTERS, VOL. 10, NO. 6, NOVEMBER 2013
Material Classification of Underground UtilitiesFrom GPR Images Using DCT-Based
SVM ApproachMohamed S. El-Mahallawy, Member, IEEE, and Mazlan Hashim, Member, IEEE
Abstract—In this letter, we introduce the utilization of discretecosine transform (DCT) coefficients as features supplied to thesupport vector machine (SVM) classifier to identify undergroundutility material from ground penetrating radar (GPR) imagery.Different types of features, reflected signal amplitudes, and sta-tistical features, combined with the SVM classifier for materialidentification of underground utilities, are also studied and com-pared to the DCT-based approach. The system performance isconducted by simulation studies using generated GPR imagescreated by a GPR finite-difference time-domain-based simulatorused to develop various acquisition situations by changing theutility material type, position, and size parameters. The efficiencyof the proposed technique in material identification is assessedusing noisy generated GPR images degraded with speckle noise.Two-dimensional median and adaptive Wiener filters are alsoexamined as a preprocessing step to the studied techniques. Sim-ulation results show that the proposed technique combined withadaptive Wiener filter reveals a good performance regarding therecognition accuracy compared to the other studied techniques innoisy environment.
Index Terms—Discrete cosine transform (DCT), feature extrac-tion, ground penetrating radar (GPR), support vector machine(SVM), underground utilities.
I. INTRODUCTION
GROUND penetrating radar (GPR) is a nondestruc-tive method that uses electromagnetic radiation in the
VHF–UHF band of the radio spectrum to locate shallow ge-ological subsurface features and underground utilities buriedin the ground. Mostly, GPR is very effective in detecting andlocating different types of pipes as steel, concrete, and plasticpipes and cables as electric, phone, and optical fiber cables [1]that are buried.
GPR works by transmitting an electromagnetic wave intothe ground. This wave goes through reflection, refraction, andscattering, when hitting buried object with different dielectricproperties. The reflected signals (backscatters) received by the
Manuscript received August 6, 2012; revised October 15, 2012; acceptedApril 22, 2013. Date of publication July 4, 2013; date of current versionOctober 10, 2013.
M. S. El-Mahallawy is with the Arab Academy for Science, Technology andMaritime Transport, Cairo, Egypt (e-mail: [email protected]).
M. Hashim is with the Institute of Geospatial Science and Technol-ogy, Universiti Teknologi Malaysia, Johor Bahru 81310, Malaysia (e-mail:[email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/LGRS.2013.2261796
GPR antenna are called A-scans. Different A-scans received atdifferent scan positions are arranged side by side to form theunderground image profile called B-scan. This image can thenbe examined to find and locate the buried underground utilities.Typically, the interpretation of the large amount of acquired andstored GPR data involves a human operator with high skill andexperience and, thus, high costs in terms of time and money.Hence, these cost problems lead to the growing request for thedevelopment of accurate and fast automated subsurface utilitydetection and identification techniques.
The extraction of numerous characteristics associated withthe buried utilities indicated from the automatic analysis ofthese utilities elevates the following four main methodologicalproblems: utility detection and localization, utility materialrecognition, utility dimension estimation, and utility shape es-timation. Lately, most of the research is concentrated on thedetection and localization of buried objects [2]–[6]; however,very few works are done on the material identification ofunderground utilities [7]. Our analysis of these studies revealedthe lack of a sound robust compact (low-dimensional) fea-ture vector adequate for the task of material classification ofunderground utilities in the presence of radar noise. At themoment, however, and to the best of the author’s knowledge,the best reported ones among the few works which tackle thematerial identification problem are done by Pasolli et al. [7]who classify three different types of underground utility mate-rials in their study. In [7], the GPR reflected signal amplitudesare used as a feature vector supplied to the support vectormachine (SVM) classifier. Such type of features is not robust tonoise.
In this letter, we test different types of features: time-seriesamplitudes, and statistical and discrete cosine transform (DCT)domain spectral features combined with SVM classifier formaterial identification. The performance of the material recog-nition system based on different types of features is performedtaking into consideration severe introduced speckle noise. Also,the effect of using different types of filters as a preprocessingstep to feature extraction on the recognition accuracy is alsoaddressed in this letter.
The rest of this letter is organized as follows. The ma-terial recognition methodology used is stated in Section II,demonstrating the speckle noise elimination filters used, thefeature extraction methods carried out in this study, and abrief discussion of the SVM recognizer applied for mate-rial identification. Data preparation and simulation results areillustrated in Section III. Finally, conclusions are stated inSection IV.
1545-598X © 2013 IEEE

EL-MAHALLAWY AND HASHIM: MATERIAL CLASSIFICATION OF UNDERGROUND UTILITIES FROM GPR IMAGES 1543
II. MATERIAL RECOGNITION METHODOLOGY
A. Image Preprocessing
GPR image is normally exposed to electromagnetic noise.Speckle noise is a typical type of multiplicative noise in conven-tional radar results from random fluctuations in the return signalfrom an object that is no bigger than a single image-processingelement. Speckle noise increases the mean gray level of a localarea. Such type of noise is very critical in GPR image analysis,leading to image misinterpretation.
In this letter, two types of filters, widely used in geophysicaldata filtering, are studied to reduce noise from the GPR imagesprior to feature extraction and classifications: 2-D median fill-ter and adaptive Wiener filter. The effect of employing thesefilters in the material recognition system is investigated andcompared.
Median filter is a common nonlinear filter used to removespeckle noise while preserving the shape edges. In the me-dian filtering, the value of an output pixel is determined bythe median of the neighborhood pixels, rather than the mean(averaging filter). This type of filter is much less sensitive thanthe traditional average filter to the outliers. Therefore, medianfiltering is better used to remove the outliers without blurringthe image and deforming the edge information [8].
Adaptive Wiener filter is a linear filter applied to an imageadaptively, modifying itself according to the local variance ofthe image. The filter performs little smoothing when the localvariance is large while performing more smoothing when thelocal variance is large preserving the edges of the image. Thefilter adaptively estimates the mean and variance around eachpixel i(n1, n2) as follows:
μ =1
NM
∑n1,n2∈η
i(n1, n2) (1)
σ2 =1
NM
∑n1,n2∈η
i2(n1, n2)− μ2 (2)
where η is the N ×M local neighborhood of each pixel inthe GPR image I; the filter then uses the estimated means andvariances to create a pixelwise Wiener filter
i′(n1, n2) = μ+σ2 − v2
σ2(i(n1, n2)− μ) (3)
where ν2 is the noise variance. The noise variance is estimatedusing the average of all the local estimated variances [9].
B. Feature Extraction
In utility material detection, GPR feature extraction isachieved by using time-series or spatial features. The time-series features are extracted from A-scans. Even if it is moreconvenient for GPR operators to deal with GPR data in theB-scan format, however, all subsurface information about thescanned area is enclosed in the A-scans. In the time-seriesfeature extraction method, the selection of a suitable descriptoris of vital importance. This descriptor should be able to em-phasize a feature of the signal, which is almost unique to thatsignal. Using the statistical descriptors of time-series featureextraction approach, three main descriptors have been proven toachieve well results in object detection tasks: the variance, the
mean absolute deviation (MAD), and the fourth moment [10].Using the spectral descriptors of time-series feature extractionapproach, the periodogram and the time–frequency analysis arepractical feature extraction methods that are used.
In the spatial feature extraction approach, boundary-basedtechniques, region-based techniques, and hybrid techniquescan be used using the B-scan image [6]. Although all thesetypes of features sound good in underground utility detection,none of them is tested in the material classification of theunderground utilities except using the time-series signal (ampli-tudes) returned from the target as featured in [7]. In this letter,different types of features are studied to achieve unique featuresfor the subsurface utility material identification which are thefollowing.
1) Time-Series Features: Time-series feature vector extrac-tion starts by detecting the apex position of the hyperbola ofthe underground utility from the GPR B-scan image, which isassumed known in our work. The most related A-scan signalamplitudes of the detected utility are then extracted from thewindow centered at the detected utility apex. Noise effect isreduced by averaging the neighboring traces centered at theapex to produce a waveform feature vector, each correspondingto an exact sampling time around the utility apex. Eventually,the feature vector is normalized in the range of [0, 1] so that thedetected utility features will be influenced only by the utilitydielectric characteristics and not on the dimension or the depthof the detected utility [7].
2) Statistical Features: Four statistical features extractedfrom the time-series signal were investigated in our study fortheir classification ability. Three of these features were usedsuccessfully by Shihab et al. [10] in discriminating signalsreflected from targets from other nonuseful ones. These featuresare the following.
1) Signal variance
σ2 =1
N − 1
N∑i=1
(xi − x̄)2 (4)
where xi is the ith element in the vector x of length Nand x̄ is the mean value of x.
2) Signal mean absolute deviation
MAD =1
N
N∑i=1
|xi − x̄|. (5)
3) Signal kurtosis (normalized fourth central moment)
kurtosis =E(x− x̄)4
σ4(6)
where E(x) is the expected value of x.The previous extracted statistical features are used in addi-
tion to the signal skewness (normalized third central moment)given by
skewness =E(x− x̄)3
σ3. (7)
3) DCT Features (Spectral Features): DCT transforms atime-domain GPR signal (extracted as stated earlier) into itscomponent frequencies represented by a set of coefficients. The

1544 IEEE GEOSCIENCE AND REMOTE SENSING LETTERS, VOL. 10, NO. 6, NOVEMBER 2013
main advantage of the DCT extends from its relationship tothe optimum Karhunen–Loéve transform (KLT) which concen-trates most of the signal power in its first largest coefficients.However, KLT is rarely used practically for its signal depen-dence and high computational cost. From all the deterministicdiscrete transforms, the DCT best approximates the KLT withlow computational complexity. DCT k coefficients (1, . . . ,N) can be calculated for the reflected N -length time-seriessignal as
y(k) = w(k)
N∑n=1
x(n) cos
(π(2n− 1)(k − 1)
2N
)(8)
where
w(x) =
{ 1√N, k = 1√2N , 2 ≤ k ≤ N .
(9)
C. SVM
After the feature extraction step, the material identificationcan be done using SVM. SVM is a supervised machine learningtechnique that has been applied successfully in different appli-cations including, but not limited to, speech identification, facerecognition, and text classification. In SVM, training is done byoptimizing a convex cost function without the presence of falselocal minima, hence simplifying the learning process [11].
SVM was designed originally for solving binary classifi-cation problem. Suppose that each class training set X con-sists of L feature vectors xi ∈ �d(i = 1, 2 . . . , L) with featurespace dimension d. Each vector represents one of two classesyi ∈ {−1,+1}. The linear SVM works by finding an optimalhyperplane between two classes that maximizes the separatingmargin. For nonlinearly separable data, a kernel method isused to map the data in a higher dimensional feature space,i.e., Φ(X) ∈ �d(d > d), to become linearly separable andapply the linear SVM algorithm. The optimal hyperplane (w∗ ·Φ(x) + b∗), characterized by the weight vector w∗ (normal tothe hyperplane), and the bias b∗ can be identified by solving thefollowing optimization problem:
minw,b,ξi
1
2‖w‖2 + C
L∑i=1
ξi
s.t. yi (w,Φ(x) + b) ≥ 1− ξi, iξ (10)
where ξi is called slack variables used to account for nonsepa-rable data and the parameter C is added to control the tradeoffbetween the slack variable penalty and the width of the margin.Using a Lagrange functional, this optimization problem can bereformulated in (11), where the Lagrange multipliers (α’s) canbe calculated by using dual optimization
maxα
L∑i=1
αi −1
2
L∑i=1
αiαjyiyjΦ(xi)Φ(xj)
s.t. 0 ≤ αi ≤ C ∀i,L∑
i=1
αiyi = 0 (11)
where
w =L∑
i=1
αiyiΦ(xi). (12)
The problem formulated in (11) is a convex quadratic opti-mization problem, and α can be obtained using the quadraticoptimization problem solver. The final discriminant functionidentified by w∗ and b∗ can be known, and hence, the supportvector set representing the nonzero Lagrange multipliers can beidentified. From the optimization problem formulated in (11),it is clear that the mapped data appear as an inner product only.From Mercer’s theorem, it is known that, for any two points xi
and xj and a certain mapping function Φ(x), a kernel functioncan be used to evaluate the inner product of the mapped pointswithout knowing the mapping function, e.g., Φ(xi)Φ(xj) ≡K(xi, xj). Thus, the linear classifier is changed to a nonlinearclassifier by substituting the inner product in the optimizationproblem by the kernel evaluation. One of the most commonkernel functions used is the Gaussian function given by
K(xi, xy) = exp(γ‖xi − xj‖2
)(13)
where γ parameter controls the Gaussian kernel width.To solve a multiclass SVM problem, two approaches can be
used, either by creating several binary classifiers or by usinga larger multiclass optimization problem. However, it is moreexpensive computationally to solve a multiclass optimizationproblem in one step than a binary problem using the same datasize [12]. In this letter, the major multiclass SVM methods,e.g., one-against-one method, based on constructing binaryclassifiers, are used. It generates k(k − 1)/2 classifiers; eachclassifier is trained on data from two classes. Many approachescan then be applied for material classification, one of whichused in this study is the voting approach using “Max Wins”strategy.
III. SIMULATION RESULTS
A. Data Preparation
The evaluation of different feature-based approaches stud-ied in this letter is performed using different generated GPRimages synthesized by using the electromagnetic simulator“GprMax2D” [13]. GprMax2D was implemented using thefinite-difference time-domain numerical technique. An approx-imate solution for the Maxwell’s equations is directly obtainedin the time domain by discretizing it in both space and timethrough an iterative process.
In our simulations, several parameters have to be set forthe transmission and acquisition system. The GPR signal is aRicker wavelet with central frequency (fcentral) set to 250 MHzgenerated by electric line source. In order to keep a minimumdiscretization errors associated with numerically induced dis-persion, the discretization step must be at least ten times smallerthan the smallest wavelength of the propagating wave (Δx =Δy = λ/10). It has been assumed that the highest frequencyin the pulse spectrum fm = 3fcentral = 750 MHz. The signalwavelength should be calculated by
λ =c
fm√εr
(14)

EL-MAHALLAWY AND HASHIM: MATERIAL CLASSIFICATION OF UNDERGROUND UTILITIES FROM GPR IMAGES 1545
where c is the light speed in the free space and εγ is thedielectric relative permittivity. Assuming εγ = 4, the spatialsteps Δx and Δy are set to 0.02 m. The time step Δt is alsoset to 47 ps according to the Courant, Freidrichs, and Lewynumerical stability condition given by
Δt � 1√1
(Δx)2 + 1(Δy)2
. (15)
The GPR position hantenna is set at 0.1 m from the ground.Also, the distance between each two subsequent GPR scans isset to 0.04 m. The simulated time window is set to 90 ns.
The ground model used in our evaluation test is a box with3-m length, 3-m width, and 2-m height (3 × 3 × 2 m), witha homogeneous dry sandy nature (with electrical conductivityfixed to 0.001 S/m) and buried cylindrical pipe. For our eval-uations, different GPR images are generated by changing thefollowing parameters of the test model:
1) the dielectric permittivity of sand (εr ∈ [3, 5]);2) the type of material such as the following: six differ-
ent material types including ductile iron (DI) (εr = 14,μr = 481, and σ = 2.23× 107 S/m), mild steel (MS)(εr = 3.1, μr = 150, and σ = 1.334× 105 S/m), clay(εr = 2.5, μr = 2, and σ = 2.5× 10−2 S/m), medium-density polyethylene (MDPE) (εr = 2.3, μr = 2.39, andσ = 10−5 S/m) in addition to perfect conductor and airvoids;
3) the buried object diameter (d ∈ [0.1, 1.0] m);4) the depth (z ∈ [0.5, 2.0] m).In training the SVM recognizer, we used 600 different im-
ages, each containing a single buried object. In the testingphase, 300 different clean images other than that used in thetraining are used. Also, the robustness of the classificationsystems toward noisy data is tested using 3000 generated GPRimages corrupted by speckle noise with different variances(0.01–0.1).
The SVM efficiency depends on the kernel’s type selection,the kernel’s parameters, and soft margin parameter C. The bestcommon used in many applications is the Gaussian kernel,which only has a single parameter γ to be selected. Best com-bination of C and γ is selected by a grid search with growingsequences of C and γ. Cross validation is used to check theC and γ parameters combinations, the parameters combinationwith highest cross-validation accuracy is chosen [14]. The finalmodel used in classifying the testing data is then trained usingthe selected parameters using the whole training data and crossvalidation process to avoid the over fitting problem.
B. Results and Discussions
In this section, several tests are done to examine the perfor-mance accuracy of the DCT-based SVM system for identifyingdifferent materials of underground utilities using GPR images.The performances of using both the reflected time-series signalamplitudes and statistical features in underground utility mate-rial identification using SVM are also studied and compared.Also, the performance of the recognition systems using differ-ent features in the presence of noisy input data is studied. Severeimage degradations with speckle noise are considered. Medianand adaptive Wiener filters are also employed to eliminate
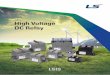
Fig. 1. Recognition rate versus the speckle noise variance using differentfeature extraction approaches.
the effect of noise on the identification system accuracy. Thedependence of the accuracy result on the degradation level isstudied for different types of features used in the recognitionsystems.
In the case of using time-series feature vector, 128 fea-tures representing the reflected signal amplitudes are used;decreasing and increasing the number of features will decreasethe accuracy of the recognition systems. In the case of usingstatistical features, four features discussed before representingthe variance, skewness, kurtosis, and MAD are used afternormalization. In the case of using the DCT features, only thelowest frequency eight features holding most of signal energyare used after normalization excluding the first DC coefficient.
Fig. 1 shows the results of an evaluation study held for testingthe capability of all the aforementioned feature extraction-basedSVM systems in detecting underground utility materials usingthe generated GPR images degraded with speckle noise andfiltered using adaptive Wiener filter. From this comparativestudy, it is inferred that the DCT feature-based SVM systemoutperforms the other studied systems in achieving the bestrecognition rate in noisy environment. This is due to the DCTenergy compaction characteristic, which leads to extractingcompact spectral features (seven coefficients are only used inthis comparison) capable of characterizing each material. It isalso obvious that using DCT features is preferred since they aremore robust against noise effects than using the extracted time-series features directly, while the statistical features are verysensitive to noise effects and degraded dramatically with in-creasing the noise variance. The proposed approach can achieve100% recognition rate for a clean image; and this is similar fortime-series features with the compact feature vector.
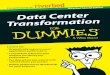
Fig. 2 shows the results of a performance comparison heldbetween different feature-based SVM systems using the medianfilter and the adaptive Gaussian filter as a preprocessing stepto the material recognition systems. It is clear from the resultsthat the best performance is achieved by using the adaptiveWiener filter as a preprocessing step to the proposed systemwith improvement about 2.5 dB in the average recognitionrate (ARR) measured across all the generated noisy GPRimages with different noise variance levels. This is becausethe 2-D median filter works on reducing the noise energy bysacrificing some signal energy, while the 2-D adaptive Wienerfilter conserves more signal energy compared to the 2-D me-dian filter [15]. Fig. 2 also clarifies that the DCT-based SVM

1546 IEEE GEOSCIENCE AND REMOTE SENSING LETTERS, VOL. 10, NO. 6, NOVEMBER 2013
Fig. 2. ARR for different feature extraction methods using median andadaptive Wiener filters.
TABLE ICONFUSION MATRIX FOR NOISY SAMPLES USING DCT-SVM APPROACH
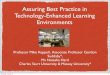
Fig. 3. ARR versus the number of DCT coefficients used in materialidentification.
outperforms the conventional time-series-based SVM by about7% improvement in the ARR in noisy environment and achiev-ing ARR = 78%.
Table I shows the confusion matrix obtained using the DCT-based SVM system and the adaptive Wiener filter for GPRutility material classification in the presence of speckle noise[with different variances (0.01–0.1)]. It is clear that there is agood separation between materials with different conductivi-ties. Most of confusion occurs between materials with closeconductivity values like MS and DI, and air voids and MDPE.
Fig. 3 also shows that the optimum number of the DCTcoefficients chosen to achieve the best ARR and that well repre-sents all types of materials is eight—the lowest frequency DCTcoefficients (after excluding the DCT coefficient). Neglectinghighest frequency coefficients, which are highly affected bynoise, improves the ARR. Selecting the number of DCT co-efficients will differ by changing the GPR specifications (i.e.,signal type, frequency, etc.) and the type of soil. However, thesame criterion can be used for selecting the DCT coefficientnumber when using other GPR system and soil type.
IV. CONCLUSION
In this letter, a new DCT-based SVM approach for materialidentification of the underground utilities from GPR imageshas been presented and evaluated under severe speckle noiseeffects. The presented approach is compared with another twoapproaches based on time-series and statistical features. Thepresented approach shows encouraging performances in termsof material recognition (recognition accuracy around 100% inclean environment and 78% in severe degraded environment)compared to the other approaches studied when used with anadaptive Wiener filter as a preprocessing step. A good perfor-mance can be achieved concerning the computational efficiencyand accuracy when combining the low-dimensional DCT fea-ture vector with the powerful SVM classification scheme whichcan powerfully classify nonlinear data by kernel mapping andmargin maximization.
REFERENCES
[1] J. L. Porsani, E. Slob, R. S. Lima, and D. N. Leite, “Comparing detectionand location performance of perpendicular and parallel broadside GPRantenna orientations,” J. Appl. Geophys., vol. 70, no. 1, pp. 1–8, Jan. 2010.
[2] W. Al-Nuaimy, Y. Huang, M. Nakhkash, M. T. C. Fang, V. T. Nguyen, andA. Eriksen, “Automatic detection of buried utilities and solid objects withGPR using neural networks and pattern recognition,” J. Appl. Geophys.,vol. 43, no. 2–4, pp. 157–165, Mar. 2000.
[3] H. S. Youn and C. C. Chen, “Automatic GPR target detection and clutterreduction using neural network,” in 9th Int. Conf. Ground PenetratingRadar—SPIE Proc, 2002, vol. 4758, pp. 579–582.
[4] P. Falorni, L. Capineri, L. Masotti, and G. Pinelli, “3-D radar imaging ofburied utilities by features estimation of hyperbolic diffraction patterns inradar scans,” in Proc. 10th Int. Conf. Ground Penetrating Radar, 2004,vol. 1, pp. 403–406.
[5] G. Borgioli, L. Capineri, P. Falorni, S. Mattucci, and C. G. Windsor, “Thedetection of buried pipes from time-of-flight radar data,” IEEE Trans.Geosci. Remote Sens., vol. 46, no. 8, pp. 2254–2266, Aug. 2008.
[6] U. S. Khan, W. Al-Nuaimy, and F. E. Abd El-Samie, “Detection of land-mines and underground utilities from acoustic and GPR images with acepstral approach,” J. Visual Commun. Image Represent., vol. 21, no. 7,pp. 731–740, Oct. 2010.
[7] E. Pasolli, F. Melgani, and M. Donelli, “Automatic analysis of GPRimages: A pattern-recognition approach,” IEEE Trans. Geosci. RemoteSens., vol. 47, no. 7, pp. 2206–2217, Jul. 2009.
[8] P. A. Torrione, C. S. Throckmorton, and L. M. Collins, “Performance of anadaptive feature-based processor for a wideband ground penetrating radarsystem,” IEEE Trans. Aerosp. Electron. Syst., vol. 42, no. 2, pp. 648–658,Apr. 2006.
[9] J. S. Lim, Two-Dimensional Signal and Image Processing. EnglewoodCliffs, NJ, USA: Prentice-Hall, 1990.
[10] S. Shihab, W. Al-Nuaimy, Y. Huang, and A. Eriksen, “Neural networktarget identifier based on statistical features of GPR signals,” in 9th Int.Conf. Ground Penetrating Radar—SPIE Proc., 2002, pp. 135–138.
[11] K. P. Bennett and C. Campbell, “Support vector machines: Hype orhallelujah?” ACM SIGKDD Explorations Newsl., vol. 2, no. 2, pp. 1–13,Dec. 2000.
[12] C.-W. Hsu, C.-C. Chang, and C.-J. Lin, “A comparison of methods formulticlass support vector machines,” IEEE Trans. Neural Netw., vol. 13,no. 2, pp. 415–425, Mar. 2002.
[13] A. Giannopoulos, “Modelling ground penetrating radar by GprMax,”J. Construct. Build. Mater., vol. 19, no. 10, pp. 755–762, Dec. 2005.
[14] C.-W. Hsu, C.-C. Chang, and C.-J. Lin, “A practical guide to supportvector classification,” Dept. Comput. Sci. Inf. Eng., Nat. Taiwan Univ.,Taipei, Taiwan, Tech. Rep., 2003.
[15] Y. Jeng, Y.-W. Li, C.-S. Chen, and H.-Y. Chien, “Adaptive filtering ofrandom noise in near-surface seismic and ground-penetrating radar data,”J. Appl. Geophys., vol. 68, no. 1, pp. 36–46, May 2009.