Embed Size (px)
Citation preview

101098rspa20031119
Mass- and volume-specimacrc views onthermodynamics for open systems
By Ellen Kuh l an d Paul Steinmann
Lehrstuhl fur Technische Mechanik Universitat Kaiserslautern67653 Kaiserslautern Germany
Received 26 June 2002 accepted 8 January 2003 published online 18 August 2003
A general framework for the thermodynamics of open systems is presented The the-ory is fundamentally based on the generalized balance of mass which is enhancedby additional surface-degux and volume-source terms The presentation highlights theindeguence of the enhanced mass balance on the remaining balance equations To clar-ify the impact of the variable reference density we introduce the notions of volume-specimacrc and mass-specimacrc formats Particular attention is drawn to the fact thatthe mass-specimacrc balance equations are free from explicit open-system contributionsThey resemble the classical balance equations and can thus be evaluated in completeanalogy to the closed-system case Restrictions for the constitutive equations fol-low from the second law of thermodynamics as illustrated for the particular modelproblem of thermo-hyperelasticity
Keywords thermodynamics open systems changes in densitybiomechanics chemomechanics
1 Introduction
In classical thermodynamics the amount of matter within a macrxed material domainis typically assumed to be constant throughout the entire thermodynamical pro-cess Conceptually speaking classical thermodynamics deals with `closed systemsrsquofor which the exchange of material with the environment is a priori excluded Formost traditional applications the conservation of mass which is nothing but a meredemacrnition yields appropriate results Nevertheless within the last few decades themacreld of application of thermodynamics supplemented by appropriate computational-solution techniques has been growing tremendously Biomechanical and chemome-chanical problems furnish typical examples of recent macrelds of interest As opposedto the traditional applications both biomechanics and chemomechanics typically fallwithin the category of `open-systemrsquo mechanics allowing for the indegux or the localcreation of mass Consequently the traditional balance of mass has to be enhancedby additional open-system contributions However the exchange of matter with theenvironment aregects not only the balance of mass since the newly generated or in-degowing mass typically carries a specimacrc amount of momentum energy and entropyThus all the other balance equations also have to be reconsidered in the view ofopen-system thermodynamics
The `theory of open systemsrsquo is closely related to the `theory of mixturesrsquo asproposed by Truesdell amp Toupin (1960) Bowen (1976) and Runesson (1978) or
Proc R Soc Lond A (2003) 459 25472568
2547
cdeg 2003 The Royal Society
2548 E Kuhl and P Steinmann
more recently by Wu et al (1998) de Boer (2000) Diebels (2000) Ehlers (2002)or Humphrey amp Rajagopal (2002) Every individual component of the mixture canbe interpreted locally as an open system undergoing a thermomechanical exchangewith the `outside worldrsquo represented by the remaining constituents of the mixture(see for example Haupt 2000) The loss or gain of mass of one constituent is thuscompensated by the others while the overall mass of the mixture itself remains con-stant The `theory of mixturesrsquo is based on the fundamental assumption that theindividual constituents are superposed locally at each point in space However if theindividual components are spatially separated and the overall behaviour is primarilydetermined by one constituent alone it seems reasonable to conmacrne attention to onlya part of the overall matter present by making use of the `theory of open systemsrsquo
Following the line of thought introduced by Maugin (1999 x 21) an open systemcan be understood as being enclosed by a permeable deformable and diathermalmembrane through which an exchange of mass momentum energy and entropy cantake place In the context of biomechanics the macrrst model allowing for this typeof exchange in terms of volume contributions was introduced by Cowin amp Hegedus(1976) under the name of the `theory of adaptive elasticityrsquo A natural extension tothe additional surface degux terms has been presented recently by Epstein amp Maugin(2000) as the `theory of volumetric growthrsquo Proliferation hyperplasia hypertrophyand atrophy can be identimacred as typical sources of mass while the migration ormovement of cells is a classical example of a mass degux in biomechanical applications(see for example Taber 1995 Humphrey 2002)
A classical example in chemomechanics which can be found in nearly every text-book of mechanics is furnished by the motion of a burning body typically encoun-tered in rocket propulsion (see for example Truesdell amp Toupin 1960 x 155 Gold-stein 1950 x 16 Muller 1994 x 146 Haupt 2000 x 35) The open system of therocket consisting of the rocket hull plus the amount of fuel experiences a permanentloss of mass due to combustion and ejection Thus the balance of mass of the rocketstates that the time rate of change of the overall rocket mass m be in equilibriumwith the rate of mass ejection R
Dtm = R
whereby R 6 0 The `volume-specimacrcrsquo version of the balance of momentum balancesthe time rate of change of the overall momentum = m the velocity weightedby the actual mass m with the total force acting on it
Dt = with = clos ed + op en and op en = sup1op en + R
Herein clos ed denotes the standard mechanical forces The third term R explicitlyaccounts for the amount of momentum generated by the ejected mass leaving thesystem at the same velocity as the rocket itself while the second term sup1op en accountsfor the diregerence in the velocity of the ejection sup1 with respect to the rocket-headvelocity thus sup1op en = [sup1 iexcl ]R With the help of the demacrnition of the overall rocketmomentum as = m the `mass-specimacrcrsquo version of the balance of momentum canbe constructed by subtracting times the balance of mass from the volume-specimacrcversion
mDt = sup1 with sup1 = clos ed + sup1op en and sup1op en = [sup1 iexcl ]R
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2549
rsquo
F J DtF
B0 Bt
C
v
b
l
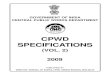
Figure 1 Kinematics
The force sup1op en responsible for changes in the rocket velocity is typically called`propulsive forcersquo or `rocket thrustrsquo
This contribution aims at providing a general framework for open-system thermo-dynamics Our primary goal is to derive the appropriate macreld equations in the formof the balance of mass momentum energy and entropy to determine the macrelds of thedensity motion and temperature as a function of time To keep the underlying theoryas general as possible mass exchanges are allowed to take place through the in- oroutdegux of matter via the domain boundary and through the creation of mass withinthe domain itself The impact of these mass exchanges on the remaining balanceequations is explored by distinguishing strictly between the `volume-specimacrcrsquo andthe `mass-specimacrcrsquo format as illustrated in the model problem of rocket propulsionAs indicated in the example the local changes in mass manifest themselves in twocontributions one assuming that the newly generated mass carries the same amountof mass-specimacrc momentum energy and entropy as the original substrate the otheraccounting for a possible diregerence in these quantities While the volume-specimacrcformat contains both types of terms the mass-specimacrc balance equations are freefrom all the explicit mass-dependent terms and only account for the latter contribu-tion Consequently the mass-specimacrc balance equations take the familiar structuretypically encountered in classical thermodynamics
This paper is organized as follows Section 2 demacrnes the basic notation and reiter-ates the relevant kinematic relations The balance of mass the fundamental equationof open-system thermodynamics is introduced in x 3 Section 4 illustrates the indegu-ence of the enhanced mass balance on the balance of momentum which is discussed inthe volume-specimacrc and in the mass-specimacrc formats The balance of angular momen-tum and the balance of kinetic energy follow as natural byproducts In x 5 the bal-ance of total and internal energy are derived Section 6 is dedicated to the balance ofentropy which macrnally lends itself to the ClausiusDuhem inequality placing furtherrestrictions to the constitutive assumptions The evaluation of the ClausiusDuheminequality is illustrated in x 7 for the model problem of thermo-hyperelasticity
2 Kinematics
The kinematic description is based on the spatial-motion map
x = rsquo(X t) B0 Bt (21)
mapping the material placement X of a physical particle in the material conmacrgurationB0 to its spatial placement x in the spatial conmacrguration Bt (see macrgure 1) The related
Proc R Soc Lond A (2003)
2550 E Kuhl and P Steinmann
spatial-deformation gradient F and its Jacobian J
F = rXrsquo(X t) T B0 TBt J = det F gt 0 (22)
demacrne the linear tangent map from the material tangent space TB0 to the spatialtangent space TBt Typically the right and left CauchyGreen strain tensors C andb
C = F t cent F b = F cent F t (23)
or their inverses B = Ciexcl1 and c = biexcl1 are introduced as characteristic strainmeasures Moreover we shall distinguish between the material time derivative Dt =tfdeggjX of mass-specimacrc quantity fdegg at macrxed material placement X and the spatialtime derivative dt = tfdeggjx at macrxed spatial placement x The material and thespatial time derivative of any scalar- or vector-valued mass-specimacrc quantity fdegg arerelated via the Euler theorem
Dtfdegg = dtfdegg + rxfdegg cent v (24)
through the convective term rxfdegg cent v The spatial velocity v is introduced as thematerial time derivative of the spatial-motion map rsquo
v = Dtrsquo(X t) (25)
Its material gradient rXv is identical to the material time derivative of the spatial-deformation gradient F while the spatial-velocity gradient rxv will be denoted asl in the following equation
DtF = rXv l = rxv (26)
With these demacrnitions at hand the material time derivative of the Jacobian J can beexpressed through the well-known Euler identity DtJ = J div v with div v = F iexclt DtF denoting the spatial divergence of the spatial velocity v In the following wewill distinguish between volume-specimacrc scalar-valued or tensorial quantities withmaterial reference fdegg0 = raquo 0fdegg and with spatial reference fdeggt = raquo tfdegg wherebyfdegg denotes the mass-specimacrc density The integration of a quantity with materialreference over the material domain B0 yields the identical result as the integrationof a quantity with spatial reference over the spatial domain Bt
Z
B0
fdegg0 dV =Z
Bt
fdeggt dv (27)
The local counterpart of the above equation demacrnes the classical relation betweenvolume-specimacrc material and spatial quantities
fdegg0 = Jfdeggt (28)
Correspondingly we can relate any vector- or tensor-valued surface degux fcurreng throughthe boundary of the material domain B0 to the corresponding contribution fsectgthrough the spatial boundary Bt
Z
B0
fcurreng cent dA =Z
Bt
fsectg cent da (29)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2551
rsquo
F J DtF
B0 Bt
raquo 0
R
R0
raquo t
r
Rt
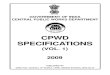
Figure 2 Balance of mass densities deg uxes and sources
By making use of the classical Nanson formula from 1878 as da = JF iexclt cent dA weobtain the local counterpart of the above equation
fcurreng = Jfsectg cent F iexclt (210)
a relation between the material and the spatial surface deguxes which can alternativelybe expressed as Divfcurreng = J divfsectg Moreover we will make use of the diregerentialform of Reynoldsrsquos transport theorem
jDtfdegg0 = dtfdeggt + div(fdeggt laquo v) (211)
which follows from the above considerations It states that the material time rateof change of the volume-specimacrc quantity fdegg0 in a material domain B0 is equal tothe spatial time rate of change of the volume-specimacrc quantity fdeggt in the spatialdomain Bt plus the degux fdeggt laquo v through the surface Bt of the moving domainWhile Reynoldsrsquos transport theorem (211) will later on be applied to relate spatialand material quantities in the volume-specimacrc format the Euler theorem (24) willserve to relate the corresponding mass-specimacrc quantities
With the introduced demacrnitions at hand we will now elaborate the balance equa-tions for open systems For the sake of transparency we shall assume that suplusmncientsmoothness criteria are fulmacrlled by the related macrelds of the balanced quantity itselffdegg0 or fdeggt the related deguxes fcurreng and fsectg and the corresponding source termsfmacrg0 and fmacrgt Consequently instead of analysing the global or integral form of thebalance laws
Dt
Z
B0
fdegg0 dV =Z
B0
fcurreng cent dA +Z
B0
fmacrg0 dV
dt
Z
Bt
fdeggt dv +Z
Bt
[fdeggt laquo v] cent da =Z
Bt
fsectg cent da +Z
Bt
fmacrgt dv
9gtgtgt=
gtgtgt(212)
we will restrict ourselves to their local or rather diregerential format
Dtfdegg0 = Divfcurreng + fmacrg0
dtfdeggt + div(fdeggt laquo v) = divfsectg + fmacrgt
)
(213)
3 Balance of mass
In classical non-relativistic mechanics of closed systems the quantity of matter in abody B0 does not change irrespective of the motion the deformation and the accel-eration of the body However this conservation of mass is a mere demacrnition which is
Proc R Soc Lond A (2003)
2552 E Kuhl and P Steinmann
no longer valid for open systems like the ones considered here In abstract terms thelocal balance of mass of open systems states that the rate of change of the materialor spatial density raquo 0 or raquo t is equal to the sum of the divergence of the related massdegux R or r and the mass source R0 or Rt (see macrgure 2) Note that most existingtheories for open systems except for the one developed by Epstein amp Maugin (2000)a priori exclude the in- or outdegux of mass as R = 0 and r = 0 The leaching of port-landite or the progressive decalcimacrcation of the calcium silicate hydrates in concretefurnish typical examples of an outdegux of mass in chemomechanical applications Cellmigration is another example of a mass degux typically encountered in biomechanicalproblems In principle it always is possible to express any degux term R or r throughan equivalent source term of the form Div R or div r according to the `equivalence ofsurface and volume sourcesrsquo as stated by Truesdell amp Toupin (1960 x 157) Howeverwe shall allow for independent degux terms in the following to keep the underlyingtheory as general as possible Consequently the material version of the balance ofmass can be stated as
Dt raquo 0 = Div R + R0 (31)
The individual terms in the above equation can be pushed forward with the help ofthe standard Piola transforms
raquo 0 = J raquo t R0 = JRt R = Jr cent F iexclt (32)
Note that in classical continuum mechanics with R = 0 and R0 = 0 equa-tion (32)1 is usually referred to as the `material continuity equationrsquo The applicationof Reynoldsrsquos transport theorem (211)
jDt raquo 0 = dt raquo t + div( raquo tv) (33)
introduces the spatial version of the balance of mass
dt raquo t + div( raquo tv) = div r + Rt (34)
Equation (34) which was introduced as the `spatial continuity equationrsquo by Euler in1757 represents one of the basic equations in classical deguid mechanics in the contextof closed systems with r = 0 and Rt = 0 In the following we shall distinguishbetween the material and the spatial version of the balance of mass given in theform
Dt raquo 0 = Div R + R0 dt raquo t + div( raquo tv) = div r + Rt (35)
Remark 31 (volume- and mass-specimacrc formats) In the present theorythe balance of mass plays a central role since it can essentially be used to transformthe volume-specimacrc version of any other balance law to its mass-specimacrc counterpartIn the volume-specimacrc format the quantity to be balanced can either be given withmaterial or spatial reference as fdegg0 = raquo 0fdegg or fdeggt = raquo tfdegg It is balanced withthe sum of the divergence of the corresponding deguxes fcurreng and fsectg and the volumesources fmacrg0 and fmacrgt
Dtfdegg0 = Divfcurreng + fmacrg0 dtfdeggt + div(fdeggt laquo v) = divfsectg + fmacrgt (36)
The material and spatial versions of a balance law (36)1 and (36)2 respectivelyare related through the corresponding Piola transforms fdegg0 = Jfdeggt fmacrg0 = Jfmacrgt
and fcurreng = Jfsectg cent F iexclt in combination with Reynoldsrsquos transport theorem (211)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2553
rsquo
F J DtF
B0 Bt
p0
brvbar t
b0
pt
frac14 t
bt
Figure 3 Balance of momentum momentum densities deg uxes and sources
Note that the deguxes fcurreng and fsectg can be expressed in terms of the reduced deguxterms f sup1curreng and fsup1sectg in the form
fcurreng = fsup1curreng + fdegg laquo R fsectg = fsup1sectg + fdegg laquo r (37)
Correspondingly the volume-specimacrc source terms are demacrned in terms of the reducedsource terms fsup1g0 and fsup1gt
fmacrg0 = fsup1g0 + fdeggR0 iexcl rXfdegg cent R fmacrgt = fsup1gt + fdeggRt iexcl rxfdegg cent r (38)
Each balance law can thus be transformed into a mass-specimacrc version balancingthe rate of change of the mass-specimacrc quantity fdegg = fdegg0=raquo 0 or fdegg = fdeggt=raquo t withthe corresponding reduced degux f sup1curreng and fsup1sectg and the reduced source terms fsup1g0
and fsup1gt The mass-specimacrc balance equations can be derived by subtracting fdeggtimes the balance of mass (35) from the corresponding volume-specimacrc version (36)Consequently we obtain remarkably simple generic forms of the mass-specimacrc balancelaws
raquo 0 Dtfdegg = Divfsup1curreng + fsup1g0 raquo t dtfdegg + raquo tv cent rxfdegg = divfsup1sectg + fsup1gt (39)
which are related through the Piola transforms fdegg0 = Jfdeggt fsup1g0 = Jfsup1gt andf sup1curreng = Jfsup1sectg cent F iexclt and the Euler theorem (24) Note that the mass-specimacrc formatis free from all the explicit extra terms caused by the changes in mass Howeverthis is not the case in the formulation developed by Epstein amp Maugin (2000) wherethe gradient terms rXfdegg cent R and rxfdegg cent r are part of the mass-specimacrc balanceequation (39)
4 Balance of momentum
Bearing in mind the derivation of the generic balance laws of the preceding sectionwe now elaborate their specimacrcation to yield the balance of linear momentum It willturn out that the balance of angular momentum and the balance of kinetic energy canbe interpreted as particular weighted versions of the balance of linear momentum
(a) Volume-specimacrc version
The balance of momentum represents one of the `laws of classical mechanicsrsquo Forclosed systems it was macrrst specimacred by Euler in 1776 It states that in an inertialframe the reaction of any body is equal to the load acting upon it Therein thereaction is characterized through the volume-specimacrc momentum density p0 or pt
Proc R Soc Lond A (2003)
2554 E Kuhl and P Steinmann
canonically demacrned as a spatial covector given through the partial derivative of thevolume-specimacrc kinetic-energy density K0 or Kt
K0 = 12raquo 0v cent v Kt = 1
2raquo tv cent v (41)
with respect to the spatial velocity v
p0 = v K0 = raquo 0v pt = v Kt = raquo tv (42)
The load can essentially be divided into two types namely the contact or surfaceforces represented by the momentum deguxes brvbar t and frac14 t and the at-a-distance forcesie the momentum sources b0 and bt (see macrgure 3) Consequently the material versionof the volume-specimacrc balance of momentum sometimes also referred to as `Cauchyrsquosmacrrst law of motionrsquo can be expressed as
Dtp0 = Div brvbar t + b0 (43)
In honour of the work of Piola in 1833 and Kirchhoreg in 1852 the momentum degux brvbar t
is typically referred to as the macrrst PiolaKirchhoreg stress tensor in classical continuummechanics With the help of the well-known Piola transforms
p0 = Jpt b0 = Jbt brvbar t = J frac14 t cent F iexclt (44)
the individual terms of equation (43) can be pushed forward to the spatial conmacrgu-ration The corresponding momentum degux frac14 t is commonly denoted as the Cauchystress tensor in standard continuum mechanics commemorating the early work ofCauchy in 1823 The application of Reynoldsrsquos transport theorem (211)
jDtp0 = dtpt + div(pt laquo v) (45)
yields the spatial version of the balance of momentum
dtpt + div(pt laquo v) = div frac14 t + bt (46)
which is typically applied in classical deguid mechanics The overall degux term frac14 t iexclpt laquo v redegects the convective nature of the above equation through the transport oflinear momentum pt laquo v In summary we distinguish between the material and thespatial version of the volume-specimacrc balance of momentum
Dtp0 = Div brvbar t + b0 dtpt + div(pt laquo v) = div frac14 t + bt (47)
On the Neumann boundary characterized through the material and spatial normalN and n the normal projections of the momentum deguxes of PiolaKirchhoreg andCauchy type brvbar t and frac14 t are required to be in equilibrium with the correspondingclosed- and open-system stress-vector contributions tclos ed
0 or tclos edt and top en
0 ortop en
t respectively
brvbar t cent N = tclos ed0 + t op en
0 top en0 = sup1t op en
0 + [p laquo R] cent N
frac14 t cent n = tclos edt + t op en
t top ent = sup1t op en
t + [p laquo r] cent n
)
(48)
Correspondingly the momentum sources terms b0 and bt can be understood as thesum of the closed- and the open-system volumeforce contributions bclos ed
0 or bclos edt
and bop en0 or bop en
t
b0 = bclos ed0 + bop en
0 bop en0 = sup1bop en
0 + pR0 iexcl rXp cent R
bt = bclos edt + bop en
t bop ent = sup1bop en
t + pRt iexcl rxp cent r
)
(49)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2555
While the expressions in terms of R r R0 and Rt take into account the part ofthe newly created or indegowing mass that carries the same amount of mass-specimacrcmomentum p as the original substrate the additional terms sup1t op en
0 sup1t op ent sup1b op en
0 andsup1b op en
t account for a possible diregerence in the momentum density
Remark 41 (balance of angular momentum) The volume-specimacrc angular-momentum density l0 or lt is demacrned through the vector product of the correspondinglinear momentum density p0 or pt with a distance vector a = rsquo iexcl rsquo0 from a macrxedpoint rsquo0 in space
l0 = a pound p0 lt = a pound pt (410)
In the absence of distributed couples and internal rotational degrees of freedom thevolume-specimacrc balance of angular momentum for open systems can be derived bytaking the vector product of the volume-specimacrc momentum balance (47) with thedistance vector a
a pound Dtp0 = a pound Div brvbar t + a pound b0 (411)
With the demacrnition of the angular momentum (410) the above equation can berewritten as
Dtl0 = Div(a pound brvbar t) + a pound b0 iexcl F pound brvbar t (412)
Thereby the vector product of the two second-order tensors iexcl F pound brvbar t can beexpressed in terms of the axial vector of the related second-order tensor [F cent brvbar ]axlas iexcl F pound brvbar t = 2[F cent brvbar ]axl It proves convenient for later purposes to reformulate theabove statement in terms of the reduced momentum degux sup1brvbar t = brvbar t iexcl p laquo R andthe reduced momentum source sup1b0 = b0 iexcl pR0 + rXp cent R
Dtl0 = Div(a pound [ sup1brvbar t +p laquoR])+a pound [sup1b0 +pR0 iexcl rXp cent R] iexcl F pound [ sup1brvbar t +plaquoR] (413)
Herein the third term on the right-hand side
iexcl F pound [ sup1brvbar t + p laquo R] = 2[F cent [ sup1brvbar + R laquo p]]axl
represents the volume-specimacrc production of the angular momentum l0 Anticipatinglater considerations we would like to point out that assuming the symmetry of thereduced momentum degux F cent sup1brvbar = sup1brvbar t cent F t or equivalently sup1frac14 = sup1frac14 t the production ofangular momentum reduces to 2[F cent [R laquo p]]axl or 2[r laquo p]axl respectively
Remark 42 (balance of kinetic energy) Although the balance of kineticenergy does not constitute an independent balance law it proves signimacrcant to takea closer look at it since it will help to introduce work conjugate stress and strainmeasures Moreover the balance of kinetic energy will be used to identify the externaland internal mechanical power which are essential for our further thermodynamicalconsiderations The starting point is the material time derivative of the volume-specimacrc kinetic-energy density K0 = 1
2raquo 0v cent v
DtK0 = raquo 0 DtK + K Dt raquo 0 = p0 cent Dtv + K Dt raquo 0 = v cent Dtp0 iexcl K Dt raquo 0 (414)
With the projection of the volume-specimacrc balance of momentum (43) with the spa-tial velocity v and the balance of mass (35)1 weighted by the mass-specimacrc kinetic-energy density K
v cent Dtp0 = Div(v cent brvbar t) + v cent b0 iexcl rXv brvbar t
KDt raquo 0 = Div(KR) + KR0 iexcl rXK cent R
)
(415)
Proc R Soc Lond A (2003)
2556 E Kuhl and P Steinmann
equation (414) can be rewritten in the explicit form
DtK0 = Div(v cent brvbar t iexcl KR) + v cent b0 iexcl KR0 + rXK cent R iexcl brvbar t DtF (416)
In what follows it will prove convenient to reformulate the above equation in terms ofthe reduced momentum degux sup1brvbar t = brvbar t iexcl p laquo R and the reduced momentum sourcesup1b0 = b0 iexcl pR0 + rXp cent R which can be related to their overall counterparts brvbar t andb0 through the following identities
Div(v cent brvbar t) = Div(v cent sup1brvbar t) + Div(2KR)
v cent b0 = v cent sup1b0 + 2KR0 iexcl v cent rXp cent R
brvbar t DtF = sup1brvbar t DtF + p cent rXv cent R
9gtgt=
gtgt(417)
With the help of the above equations and the identity v cent rX p + p cent rXv = 2rXKfollowing from v cent p = 2K equation (416) can be reformulated in the following way
DtK0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R iexcl sup1brvbar t DtF (418)
As stated by Stokes in 1857 the rate of change of the kinetic energy is equal to theexternal mechanical power minus the internal mechanical power Consequently theright-hand side of the above equation enables the identimacrcation of the volume-specimacrcexternal and internal mechanical power pext
0 and pin t0
pext0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R
pin t0 = sup1brvbar t DtF
)(419)
whereby pext0 characterizes the total rate of working of mechanical actions on the
body This rate of working consists of the degux contribution v cent sup1brvbar t + KR and thesource term v cent sup1b0 + KR0 iexcl rXK cent R The internal mechanical power pin t
0 consistsexclusively of the production term for the kinetic energy as sup1brvbar t DtF The demacrnitionof the latter suggests the interpretation of the reduced momentum degux sup1brvbar t and thematerial time derivative of the deformation gradient DtF as work conjugate pairsWith the above abbreviations at hand the balance of kinetic energy can be rewrittenin a form which has been denoted as the local form the `theorem of energyrsquo by Maugin(1993)
DtK0 = pext0 iexcl pin t
0 dtKt + div(Ktv) = pextt iexcl pin t
t (420)
The spatial version of the balance of kinetic energy (420)2 follows naturally byapplying the appropriate Piola transforms K0 = JKt
pext0 = Jpext
t and pin t0 = Jpin t
t along with Reynoldsrsquos transport theorem (211)
(b) Mass-specimacrc version
The mass-specimacrc version of the balance of momentum is based on the mass-specimacrckinetic-energy density
K = 12v cent v (421)
demacrning the quantity to be balanced as its partial derivative with respect to thespatial velocity v
p = v K = v (422)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2557
The rate of change of the mass-specimacrc momentum density p ie the covariant spatialvelocity is balanced with the reduced momentum deguxes sup1brvbar t or sup1frac14 t and the reducedmomentum sources sup1b0 or sup1bt By subtracting the balance of mass (35) weighted bythe momentum density p from the volume-specimacrc momentum balance (47) we canderive the diregerent versions of the mass-specimacrc momentum balance
raquo 0Dtp = Div sup1brvbar t + sup1b0 raquo t dtp + raquo tv cent rxp = div sup1frac14 t + sup1bt (423)
The reduced momentum deguxes sup1brvbar t and sup1frac14 t which are related to the overall momen-tum deguxes brvbar t and frac14 t through sup1brvbar t = brvbar t iexcl p laquo R and sup1frac14 t = frac14 t iexcl p laquo r are deter-mined by the closed- and open-system stress-vector contributions tclos ed
0 and sup1t op en0
or tclos edt and sup1t op en
t respectively on the Neumann boundary
sup1brvbar t cent N = tclos ed0 + sup1t op en
0
sup1frac14 t cent n = tclos edt + sup1t op en
t
)(424)
while the reduced momentum sources sup1b0 and sup1bt are given as the sum of the classicalclosed-system volume force contributions bclos ed
0 or bclos edt and the reduced open-
system contributions sup1b op en0 or sup1b op en
t
sup1b0 = bclos ed0 + sup1bop en
0
sup1bt = bclos edt + sup1bop en
t
)(425)
Note that the mass-specimacrc momentum balance (423) is free from all the explicitextra terms caused by the changes in mass The indeguence of the open system mani-fests itself only implicitly through the prescribed boundary terms sup1t op en
0 and sup1t op ent and
the prescribed volume sources sup1b op en0 and sup1b op en
t The convective indeguence introducedthrough the raquo tv cent rxp term however is also present in the closed-system case
Remark 43 (balance of angular momentum) The mass-specimacrc angular-momentum density l is given as the vector product of the mass-specimacrc momentumdensity p with the distance vector a = rsquo iexcl rsquo0
l = a pound p (426)
Consequently the mass-specimacrc version of the balance of angular momentum followsfrom the vector product of the mass-specimacrc momentum balance (423) with thedistance vector a
a pound raquo 0Dtp = a pound Div sup1brvbar t + a pound sup1b0 (427)
By making use of the demacrnition (426) the above equation can be rewritten as
raquo 0Dtl = Div(a pound sup1brvbar t) + a pound sup1b0 iexcl F pound sup1brvbar t (428)
Again the third term on the right-hand side iexcl F pound sup1brvbar t = 2[F cent sup1brvbar ]axl representsthe production of the mass-specimacrc angular momentum l If we require the balanceof angular momentum to represent an individual independent statement
raquo 0Dtl = Div(a pound sup1brvbar t) + a pound sup1b0 (429)
this production term has to vanish identically This condition thus reveals the sym-metry requirements
F cent sup1brvbar = sup1brvbar t cent F t sup1frac14 = sup1frac14 t (430)
Proc R Soc Lond A (2003)
2558 E Kuhl and P Steinmann
The material and the spatial versions (430)1 and (430)2 respectively are relatedthrough the corresponding Piola transform sup1brvbar t = J sup1frac14 t cent F iexclt A comparison of thevolume-specimacrc statement (413) with its mass-specimacrc counterpart (429) indicatesthat the in- or outdegux of mass R or r produces an additional amount of angularmomentum unless
F cent R laquo p = p laquo R cent F t r laquo p = p laquo r (431)
ie the mass degux F centR or r is constitutively demacrned to be coaxial to the mass-specimacrcmomentum density p
Remark 44 (balance of kinetic energy) To investigate the mass-specimacrc ver-sion of the balance of kinetic energy we need to evaluate the material time derivativeof the mass-specimacrc kinetic-energy density K = 1
2v centv which can easily be derived by
subtracting the weighted balance of mass (415)2 from the material time derivativeof the volume-specimacrc kinetic-energy density K0 given in equation (418) as
raquo 0 DtK = DtK0 iexcl K Dt raquo 0 (432)
and thusraquo 0 DtK = Div(v cent sup1brvbar t) + v cent sup1bext
0 iexcl sup1brvbar t DtF (433)
Consequently we can identify the mass-specimacrc external and internal mechanicalpower sup1pext
0 and sup1pin t0 respectively
sup1pext0 = pext
0 iexcl KDt raquo 0 = Div(v cent sup1brvbar t) + v cent sup1b0
sup1pin t0 = pin t
0 = sup1brvbar t DtF
)(434)
It is worth noting that the diregerence of the mass- and volume-specimacrc formu-lation manifests itself only in the demacrnition of the external mechanical powersup1pext
0 = pext0 iexcl KDt raquo 0 while the mass-specimacrc internal power is identical to its volume-
specimacrc counterpart as sup1pin t0 = pin t
0 Consequently the material and the spatial versionof the mass-specimacrc balance of kinetic energy take the formats
raquo 0 DtK = sup1pext0 iexcl sup1pin t
0 raquo t dtK + raquo tv cent rxK = sup1pextt iexcl sup1pin t
t (435)
whereby both formulations are related through the corresponding Piola transformswith sup1pext
0 = J sup1pextt and sup1pin t
0 = Jsup1pin tt and the Euler theorem (24)
5 Balance of energy
The balance of total energy as a representation of the macrrst law of thermodynamicsbalances the rate of change of the volume-specimacrc total energy density E0 or Et asthe sum of the kinetic and internal energy density E0 = K0 + I0 or Et = Kt + It
with the external power In classical continuum mechanics of closed systems thisexternal power is composed of a purely mechanical contribution pext
0 or pextt and a
non-mechanical thermal contribution qext0 or qext
t Therefore the balance of energy issometimes referred to as the `principle of interconvertibility of heat and mechanicalworkrsquo a notion which was known to Carnot in 1832 and experimentally verimacredby Joule in 1843 However when dealing with open systems we have to generalizethe demacrnition of the non-mechanical external power by including additional externalopen-system contributions in the demacrnition of qext
0 and qextt (cf Malvern 1969 x 54)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2559
rsquo
F J DtF
B0 Bt
E0
v cent brvbar t Q
v cent b0 Q0
Et
v cent frac14 t q
v cent bt Qt
Figure 4 Balance of energy energy densities deg uxes and sources
(a) Volume-specimacrc version
For the spatial-motion problem the rate of change of the volume-specimacrc totalenergy density E0 = raquo 0E can be expressed in the form (cf macrgure 4)
DtE0 = Div(v cent sup1brvbar t iexcl sup1Q + ER) + v cent sup1b0 + sup1Q0 + ER0 iexcl rXE cent R (51)
Thereby in addition to the purely mechanical external power pext0 demacrned in equa-
tion (419) we have included the non-mechanical external power qext0 accounting
for the classical thermal eregects of the closed system and the additional open-systemeregects as an additional non-mechanical supply of energy
qext0 = Div( iexcl Q) + Q0 (52)
Similar to the mechanical power the non-mechanical power consists of a degux and asource contribution denoted by Q and Q0 respectively The former is composed ofthe reduced outward non-mechanical energy degux sup1Q modimacred by the explicit extradegux due to the open system IR while the latter is the sum of the reduced non-mechanical energy source sup1Q0 enhanced by the explicit eregects of the open systemIR0 and rXI cent R
pext0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R
qext0 = Div( iexcl sup1Q + IR) + sup1Q0 + IR0 iexcl rXI cent R
)
(53)
Equation (51) can thus be reformulated in the concise form
DtE0 = pext0 + qext
0 dtEt + div(Etv) = pextt + qext
t (54)
which for the classical closed-system case dates back to the early works of Duhem in1892 Again the spatial version (54)2 follows from the appropriate Piola transformsE0 = JEt
pext0 = Jpext
t qext0 = Jqext
t Q = Jq cent F iexclt and sup1Q = J sup1q cent F iexclt along withReynoldsrsquos transport theorem (211) The demacrnition of the non-mechanical energydeguxes Q and q parallels the introduction of the macrrst PiolaKirchhoreg stress tensorbrvbar and the Cauchy stress frac14 On the Neumann boundary the non-mechanical energydeguxes Q and q are given in terms of the normal projection of the classical heat deguxdensities qclos ed
0 and qclos edt and the additional open-system contributions qop en
0 andqop en
t Q cent N = qclos ed
0 + qop en0 qop en
0 = sup1q op en0 iexcl IR cent N
q cent n = qclos edt + qop en
t qop ent = sup1q op en
t iexcl Ir cent n
)(55)
Proc R Soc Lond A (2003)
2560 E Kuhl and P Steinmann
Moreover the non-mechanical energy sources Q0 and Qt can be understood as thesum of the classical heat source Qclos ed
0 and Qclos edt and an additional non-mechanical
energy source taking into account the nature of the open system Qop en0 and Qop en
t
Q0 = Qclos ed0 + Qop en
0 Qop en0 = sup1Qop en
0 + IR0 iexcl rXI cent R
Qt = Qclos edt + Qop en
t Qop ent = sup1Qop en
t + IRt iexcl rxI cent r
)(56)
In formal analogy to the demacrnition of the momentum quantities the expressions interms of R r R0 and Rt take into account the part of the newly added mass thatcarries the same amount of non-mechanical energy as the original substrate while theadditional open-system terms sup1q op en
0 sup1q op ent sup1Qop en
0 and sup1Qop ent account for a possible
diregerence in non-mechanical energy
Remark 51 (balance of internal energy) For further thermodynamical con-siderations it proves convenient to consider the volume-specimacrc internal energy den-sity I0 = E0 iexcl K0 or It = Et iexcl Kt given as the diregerence of the corresponding totalenergy density and the kinetic-energy density Consequently the two versions of thebalance of internal energy follow from subtracting the balance of kinetic energy (420)from the total energy balance (54)
DtI0 = pin t0 + qext
0 dtIt + div(Itv) = pin tt + qext
t (57)
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the equations derived above balances the mass-specimacrc energy density E = E0=raquo 0 with the mass-specimacrc external mechanical powersup1pext
0 introduced in (434) and the mass-specimacrc non-mechanical power sup1qext0 as
sup1qext0 = qext
0 iexcl IDt raquo 0 = iexcl Div sup1Q + sup1Q0 (58)
The corresponding balance equations
raquo 0 DtE = sup1pext0 + sup1qext
0 raquo t dtE + raquo tv cent rxE = sup1pextt + sup1qext
t (59)
follow from subtracting the corresponding balance of mass (35) weighted by the totalenergy E from the volume-specimacrc energy balance (54) The spatial version (59)2can be derived by applying the corresponding Piola transforms with sup1pext
0 = Jsup1pextt and
sup1qext0 = J sup1qext
t and the Euler theorem (24) Again we can relate the reduced energydeguxes sup1Q and sup1q demacrned through sup1Q = Q iexcl IR and sup1q = q iexcl Ir to the classical heatdegux qclos ed
0 or qclos edt and the energy degux caused by additional eregects of the open
system sup1q op en0 and sup1q op en
t
sup1Q cent N = qclos ed0 + sup1q op en
0
sup1q cent n = qclos edt + sup1q op en
t
)(510)
Moreover the reduced non-mechanical energy sources sup1Q0 and sup1Qt are given as the sumof the classical heat source of a closed system Qclos ed
0 and Qclos edt and the additional
open-system contribution to the energy sup1Qop en0 and sup1Qop en
t
sup1Q0 = Qclos ed0 + sup1Qop en
0
sup1Qt = Qclos edt + sup1Qop en
t
)(511)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2561
Again as opposed to the formulation developed by Epstein amp Maugin (2000) themass-specimacrc format is free from all the explicit extra terms caused by changes inmass and thus resembles the balance of energy known from classical mechanics
Remark 52 (balance of internal energy) A reduction to the balance ofinternal energy I = E iexcl K follows from subtracting the balance of kinetic energy(435) from the balance of total energy (59)
raquo 0 DtI = sup1pin t0 + sup1qext
0 raquo t dtI + raquo tv cent rxI = sup1pin tt + sup1qext
t (512)
6 Balance of entropy
The macrrst law of thermodynamics in the form of the balance of energy expressesthe interconvertibility of heat and work However the balance of energy itself doesnot place any restrictions on the direction of the thermodynamical process Thesecond law of thermodynamics the balance of entropy postulates the existence ofan absolute temperature and of a specimacrc entropy as a state function Through theinternal production of the latter which is required to either vanish for reversibleprocesses or be strictly positive for irreversible processes a direction is imposedon the thermodynamical process Recall that when dealing with open systems amacrxed material volume B0 is allowed to constantly gain or lose mass Open systemsnaturally exhibit an additional entropy degux and entropy source caused by the addedmass as pointed out earlier in the famous monograph by Schrodinger (1944 x 6) aswell as by Malvern (1969 x 56) or also recently by Epstein amp Maugin (2000) Theindeguence of changes in mass on the entropy is twofold On the one hand it is redegectedthrough the explicit open-system entropy degux SR and the related source terms SR0
and iexcl rXS cent R On the other hand we will introduce the reduced entropy degux andsource sup1H and sup1H0 respectively which in turn split into the extra non-mechanicalenergy terms sup1Q and sup1Q0 divided by the absolute temperature sup3 and an extra entropydegux and source S and S0 While the former parallel the introduction of the entropydegux and source in classical closed-system thermodynamics the contributions S andS0 account for the diregerence in entropy of the added mass and the original substrate
Remark 61 (balance of entropy versus entropy inequality) In the relatedliterature the entropy is often introduced through the entropy inequality For thesake of analogy we will treat the entropy as a balance quantity in the followingIts evolution is thus balanced with the sum of the external and internal entropyproduction whereby the latter is constrained to be non-negative throughout In thecase of closed-system thermodynamics this approach has been followed for exampleby Truesdell amp Toupin (1960 xx 256 and 257) Haupt (2000 x 33) or Liu (2002 x 5)
(a) Volume-specimacrc version
The balance of entropy balances the volume-specimacrc entropy density S0 = raquo 0S withthe external entropy input hext
0 and the internal entropy production hin t0 Thereby
the former consists of the entropy degux H across the material surface B0 and theentropy source H0 in the material domain B0 (cf macrgure 5)
hext0 = Div( iexcl H ) + H0 (61)
Proc R Soc Lond A (2003)
2562 E Kuhl and P Steinmann
rsquo
F J DtF
B0 Bt
S0
H S
H0 S0
St
h s
Ht St
Figure 5 Balance of entropy entropy densities deg uxes and sources
The external entropy degux H is introduced as the sum of the reduced external entropydegux sup1H enhanced by the explicit open-system contribution SR Accordingly theexternal entropy source H0 consists of the reduced entropy source sup1H0 modimacred byadditional terms SR0 and iexcl rXS cent R accounting for the explicit open-system con-tribution to the entropy supply
hext0 = Div( iexcl sup1H + SR) + sup1H0 + SR0 iexcl rXS cent R
hin t0 gt 0
)(62)
Just like in classical thermodynamics of closed systems the internal entropy produc-tion hin t
0 is required to be point-wise non-negative The balance of entropy can thusbe expressed in the following form
DtS0 = hext0 + hin t
0 dtSt + div(Stv) = hextt + hin t
t (63)
Again the material and the spatial version are related through the correspond-ing Piola transforms S0 = JSt
hext0 = Jhext
t hin t0 = Jhin t
t H = Jh cent F iexclt andsup1H = J sup1h cent F iexclt in combination with Reynoldsrsquos transport theorem Note that alter-
natively the balance of entropy which is primarily nothing but a formal demacrnitionof the entropy production can be recast into the inequality DtS0 iexcl hext
0 gt 0 Thiscondition which is typically referred to as `postulate of irreversibilityrsquo in classicalthermodynamics (see Truesdell amp Toupin 1960 x 258) induces a direction to thethermodynamic process Next we will introduce Neumann boundary conditions forthe spatial-motion Kirchhoreg and Cauchy type entropy degux H and h in terms of theclassical closed-system entropy degux contribution hclos ed
0 or hclos edt and the additional
open-system contribution hop en0 or hop en
t
H cent N = hclos ed0 + hop en
0 hop en0 = sup1hop en
0 iexcl SR cent N
h cent n = hclos edt + hop en
t hop ent = sup1hop en
t iexcl Sr cent n
)
(64)
Accordingly the entropy sources H0 and Ht are introduced as the sum of the classicalentropy source of the closed system Hclos ed
0 or Hclos edt and the additional entropy
source accounting for the nature of the open system Hop en0 or Hop en
t
H0 = Hclos ed0 + Hop en
0 Hop en0 = sup1Hop en
0 + SR0 iexcl rXS cent R
Ht = Hclos edt + Hop en
t Hop ent = sup1Hop en
t + SRt iexcl rxS cent r
)
(65)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2563
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the above equations states that the rate of changeof the mass-specimacrc entropy S = S0=raquo 0 is in equilibrium with the mass-specimacrcexternal entropy input sup1hext
0 and the mass-specimacrc internal entropy production sup1hin t0
which are introduced in the following way
sup1hext0 = hext
0 iexcl SDt raquo 0 = iexcl Div sup1H + sup1H0
sup1hin t0 = hin t
0 gt 0
)
(66)
The resulting material and spatial version of the balance of entropy
raquo 0 DtS = sup1hext0 + sup1hin t
0 raquo t dtS + raquo tv cent rxS = sup1hextt + sup1hin t
t (67)
which can be derived by subtracting S times the balance of mass (35) from thevolume-specimacrc balance of entropy (63) are related via the appropriate Piola trans-forms sup1hext
0 = Jsup1hextt and sup1hin t
0 = Jsup1hin tt and the Euler theorem (24) Moreover we can
relate the reduced entropy deguxes sup1H and sup1h demacrned through sup1H = H iexcl SR andsup1h = h iexcl Sr to the classical entropy degux of the closed system hclos ed
0 or hclos edt and
the entropy degux caused by additional eregects of the open system sup1hop en0 or sup1hop en
t
sup1H cent N = hclos ed0 + sup1hop en
0
sup1h cent n = hclos edt + sup1hop en
t
)(68)
Accordingly the reduced entropy sources sup1H0 = H0 iexcl SR0 + rXS cent R and sup1Ht = Ht iexclSRt + rxS cent r are given as the sum of the classical closed-system entropy sourceHclos ed
0 or Hclos edt and the additional open-system contribution to the entropy source
sup1Hop en0 or sup1Hop en
t sup1H0 = Hclos ed
0 + sup1Hop en0
sup1Ht = Hclos edt + sup1Hop en
t
)
(69)
Remark 62 (dissipation inequality) For further elaboration it proves con-venient to set up relations between the reduced entropy degux sup1H and the reducednon-mechanical energy degux sup1Q and between the reduced entropy source sup1H0 and thereduced non-mechanical energy source sup1Q0 in terms of the absolute temperature sup3 an extra entropy degux S and an extra entropy source S0
sup1H =1sup3
sup1Q + S sup1H0 =1sup3
sup1Q0 + S0 (610)
The above equations can be understood as a generalization of the ideas of Cowinamp Hegedus (1976) who have suggested including the additional entropy source S0
accounting for changes in entropy caused by changes in mass that are not consideredimplicitly through the changes in energy sup1Q0 Both the additional entropy degux S andthe entropy source S0 which we shall summarize in the term s
0 = iexcl Div S + S0 inthe following have to be determined constitutively These additional terms can beunderstood as an explicit representation of the exchange of entropy with the `outsideworldrsquo We now turn to the evaluation of the above-stated second law of thermo-dynamics by recasting it into an appropriate form of the dissipation inequality astatement that places further restrictions on the form of the constitutive response
Proc R Soc Lond A (2003)
2564 E Kuhl and P Steinmann
functions For this purpose we shall interpret the internal entropy production sup1hin t0 as
a measure for the degree of irreversibility introducing the dissipation rate sup1d0 as the
internal entropy production weighted by the absolute temperature as sup1d0 = sup3 sup1hin t
0 gt 0With the help of the balance of entropy (67)1 the relations (610) and the bal-ance of internal energy (512)1 the dissipation rate can be reformulated to yield theClausiusDuhem inequality in an internal energy based fashion
sup1d0 = sup1pin t
0 iexcl raquo 0Dt[I iexcl sup3 S ] iexcl raquo 0S Dt sup3 iexcl s0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (611)
By making use of the appropriate LegendreFenchel transform introducing theHelmholtz free energy ordf = I iexcl sup3 S we end up with the classical free-energy-basedversion of the ClausiusDuhem inequality
sup1d0 = sup1brvbar t DtF iexcl raquo 0 Dt ordf iexcl raquo 0S Dt sup3 iexcl s
0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (612)
which is particularly useful when the temperature sup3 rather than the entropy S isused as the independent variable In classical thermodynamics the ClausiusDuheminequality (612) is typically decomposed into a local and a conductive contributionsup1d loc
0 and sup1dcon0
sup1d loc0 = sup1brvbar t DtF iexcl raquo 0Dt ordf iexcl raquo 0SDt sup3 iexcl s
0 sup3 gt 0 sup1d con0 = iexcl sup1Q cent rX ln sup3 gt 0 (613)
whereby the local term sup1d loc0 gt 0 represents the ClausiusPlanck inequality for open
systems while the remaining conductive term sup1dcon0 gt 0 is typically referred to as a
Fourier inequality As a suplusmncient condition for sup1d0 gt 0 both inequalities are required
to hold separately In what follows we shall apply the dissipation inequality (613) toderive constitutive equations for the reduced momentum degux sup1brvbar t and the entropy SIn addition the evaluation of the dissipation inequality places further restrictions onthe extra entropy exchange s
0 The underlying procedure will be highlighted in detailfor the simple model problem of thermo-hyperelasticity in the following section
Remark 63 Note that at this stage the introduction of the reduced entropydegux and source sup1H = sup1Q=sup3 + S and sup1H0 = sup1Q0=sup3 + S0 as introduced in equations(610) is a mere constitutive assumption Nevertheless for particular constitutive-model problems the postulated relations can be verimacred through the evaluation ofthe dissipation inequality according to Muller (1973) and Liu (1972) (see also Liu2002) It will turn out that in most cases equations (610) are justimacred with thetrivial solution S = 0 and S0 = 0 However assuming this result from the veryoutset might be too restrictive for complex constitutive models as also pointed outby Epstein amp Maugin (2000)
7 Thermo-hyperelasticity
We are now in a position to exploit the second law of thermodynamics in the formof the ClausiusDuhem inequality along the lines of Coleman amp Noll (1963) Thestraightforward evaluation of the local part of the dissipation inequality in the formof the ClausiusPlanck inequality (613)1 will result in the demacrnition of the reducedmomentum degux sup1brvbar and the mass-specimacrc entropy density S Its conductive sup-plement (613)2 the Fourier inequality suggests the demacrnition of the reduced non-mechanical energy degux sup1Q along the lines of the classical linear heat conduction intro-duced by Fourier in 1822 Finally the mass degux R will be introduced constitutively
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2565
in the context of classical linear mass diregusion according to Fickrsquos law Here wewill thus restrict ourselves to a thermo-hyperelastic-model problem for which all thedissipation is caused exclusively by heat conduction and possibly by an additionalopen-system contribution of the `outside worldrsquo In what follows we shall make useof the multiplicative decomposition of the free energy ordf 0
ordf 0 = raquo 0 ordf (71)
Thereby the mass-specimacrc free-energy density ordf is expressed in terms of the materialdensity raquo 0 the deformation gradient F and the absolute temperature sup3 with a pos-sible explicit dependence on the material placement X Within the thermodynamicsof open systems the material density raquo 0 is allowed to vary in space and time is thusintroduced as function of the material placement X and the time t
ordf = ordf ( raquo 0 F sup3 X) raquo 0 = raquo 0(X t) (72)
Consequently the material time derivative of the free-energy density is formally givenin the form
Dt ordf = D raquo 0ordf Dt raquo 0 + DF ordf DtF + D sup3 ordf Dt sup3 (73)
The evaluation of the ClausiusPlanck inequality (613)1
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 + [ sup1brvbar t iexcl raquo 0DF ordf ] DtF iexcl [ raquo 0S + raquo 0 D sup3 ordf ] Dt sup3 iexcl s0 sup3 gt 0 (74)
demacrnes the reduced macrrst PiolaKirchhoreg stress tensor sup1brvbar t and the mass-specimacrcentropy S as thermodynamically conjugate variables to the deformation gradientF and the absolute temperature sup3
sup1brvbar t = raquo 0 DF ordf S = iexcl D sup3 ordf (75)
As in Cowin amp Hegedus (1976) we are left with a reduced inequality of the form
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 iexcl s0 sup3 gt 0 (76)
In biomechanics the simplest choice for the free-energy function ordf for cellular mate-rials such as open-pored biological tissues is based on the classical isotropic Neo-Hookean-type free-energy function weighted by the actual relative density [ raquo 0=raquo curren
0]n
(see for example Carter amp Hayes 1977 Gibson amp Ashby 1997)
ordf =middot
raquo 0
raquo curren0
cedil[niexcl1] 1raquo curren
0
[12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]] (77)
Here para and middot denote the classical Lamparae constants and n is an additional exponentusually allowed to vary between 1 6 n 6 35 A selection of more advanced free-energy functions for orthotropic biological tissues can be found for example in therecent collection of publications by Cowin amp Humphrey (2001) The derivatives of thefree energy ordf with respect to the material density raquo 0 and the deformation gradientF take the format
D raquo 0ordf = [n iexcl 1]
middotraquo 0
raquo curren0
cedil[niexcl2]middot 1raquo curren
0
cedil2
[ 12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]]
DF ordf =middot
raquo 0
raquo curren0
cedil[niexcl1]middot 1raquo curren
0
cedil[ middot F + [ para ln J iexcl middot ]F iexclt]
9gtgtgtgt=
gtgtgtgt
(78)
Proc R Soc Lond A (2003)
2566 E Kuhl and P Steinmann
whereby the macrrst derivative can alternatively be expressed as D raquo 0ordf = [n iexcl 1] ordf =raquo 0
According to equation (75) the reduced macrrst PiolaKirchhoreg stress tensor
sup1brvbar t =middot
raquo 0
raquo curren0
cediln
[ middot F + [ para ln J iexcl middot ]F iexclt] (79)
can be understood as the classical Neo-Hookean stress tensor weighted by the actualrelative density [ raquo 0=raquo curren
0]n The reduced dissipation inequality
iexcl [n iexcl 1] ordf [Div R + R0] + sup3 [Div S iexcl S0] gt 0 (710)
places implicit restrictions on the dissipation generated by the density evolution Dt raquo 0
through the mass degux R and the mass source R0 This amount of dissipation hasat least to be compensated by an appropriate constitutive assumption for the extraexternal entropy input s
0 through the extra entropy degux S and the extra entropysource S0 eg
S = [n iexcl 1] ordf1sup3
R S0 = iexcl [n iexcl 1] ordf1sup3
R0 (711)
Similar to the context of chemomechanics the degux r or R is usually related to thespatial or material gradient of the density rx raquo 0 or rX raquo 0 as
r = R0b cent rx raquo 0 R = rtB cent rX raquo 0 (712)
in analogy to Fickrsquos law for concentrations Here R0 and rt denote the mass-conduction coeplusmncient introducing either a materially or a spatially isotropicresponse In the context of biomechanics we typically macrnd variations of the con-stitutive equation
R0 =middot
raquo 0
raquo curren0
cediliexclm
ordf 0 iexcl ordf curren0 (713)
for the mass source R0 where raquo curren0 and ordf curren
0 denote the reference density and the refer-ence free energy respectively while m is an additional exponent that is commonlychosen to m gt n (see Harrigan amp Hamilton 1993) Finally the evaluation of theFourier inequality (613)2 as sup1d con
0 = iexcl sup1Q cent rX ln sup3 gt 0 suggests the demacrnition of themass-specimacrc non-mechanical energy degux sup1q or sup1Q according to Fourierrsquos law as
sup1q = iexcl K0b cent rx sup3 sup1Q = iexcl ktB cent rX sup3 (714)
with K0 and kt denoting the materially or spatially isotropic conductivity In order toa priori guarantee the satisfaction of the Fourier inequality (613)2 the conductivityis required to be non-negative K0 gt 0 and kt gt 0
8 Conclusion
We have presented a general framework for the thermodynamics of open systemsThe derived macreld equations are believed to be particularly useful in biomechanicalor chemomechanical applications where attention is conmacrned to one individual sub-system of the overall matter present Due to the fact that this open subsystem isallowed to constantly gain or lose mass the balance of mass had to be enhancedby additional surface and volume terms redegecting the interaction with the `outsideworldrsquo Since the newly created mass carries a particular amount of momentum
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2567
energy and entropy all the other balance equations had to be reformulated as wellTo clarify the indeguence of the changes in mass we have introduced the notions of`volume-specimacrcrsquo and `mass-specimacrcrsquo formats The former accounts for the total indegu-ence of the changes in mass through explicit mass-dependent and additional implicitopen-system contributions The latter however is free from all the mass-dependentextra terms and thus takes the familiar structure known from classical continuumthermodynamics The mass-specimacrc format is believed to be particularly useful sinceit parallels the framework of the closed-system case Consequently permissible con-stitutive relations can be derived from the mass-specimacrc version of the dissipationinequality The underlying procedure has been illustrated for the model problem ofthermo-hyperelasticity
References
Bowen R M 1976 Theory of mixtures In Continuum physics vol III Mixtures and EM macreldtheories (ed A C Eringen) pp 1127 Academic
Carter D R amp Hayes W C 1977 The behavior of bone as a two-phase porous structure JBone Joint Surg Am 59 785794
Coleman B D amp Noll W 1963 The thermodynamics of elastic materials with heat conductionand viscosity Arch Ration Mech Analysis 13 167178
Cowin S C amp Hegedus D H 1976 Bone remodelling I Theory of adaptive elasticity JElastic 6 313326
Cowin S C amp Humphrey J D 2001 Cardiovascular soft tissue mechanics Dordrecht Kluwer
de Boer R 2000 Theory of porous media Springer
Diebels S 2000 Mikropolare Zweiphasenmodelle Formulierung auf der Basis der TheoriePoroser Medien Habilitationsschrift Bericht aus dem Institut fur Mechanik (Bauwesen)Nr II-4 Universitat Stuttgart
Ehlers W 2002 Foundations of multiphasic and porous materials In Porous media theoryexperiments and numerical applications (ed W Ehlers amp J Bluhm) pp 386 Springer
Epstein M amp Maugin G A 2000 Thermomechanics of volumetric growth in uniform bodiesInt J Plasticity 16 951978
Gibson L J amp Ashby M F 1997 The mechanics of three-dimensional cellular materials ProcR Soc Lond A 382 4359
Goldstein H 1950 Classical mechanics Addison-Wesley
Harrigan T P amp Hamilton J J 1993 Finite element simulation of adaptive bone remodellinga stability criterion and a time-stepping method Int J Numer Meth Engng 36 837854
Haupt P 2000 Continuum mechanics and theory of materials Springer
Humphrey J D 2002 Cardiovasular solid mechanics Springer
Humphrey J D amp Rajagopal K R 2002 A constrained mixture model for growth and remod-eling of soft tissues Math Models Meth Appl Sci 12 407430
Liu I S 1972 Method of Lagrange multipliers for exploitation of the entropy principle ArchRation Mech Analysis 46 131148
Liu I S 2002 Continuum mechanics Springer
Malvern L E 1969 Introduction to the mechanics of a continuous medium Englewood Clireg sNJ Prentice Hall
Maugin G A 1993 Material inhomogenities in elasticity London Chapman amp Hall
Maugin G A 1999 The thermomechanics of nonlinear irreversible behaviors World Scientimacrc
Muller I 1973 Thermodynamik die Grundlagen der Materialtheorie Dusseldorf BertelsmannUniversitatsverlag
Proc R Soc Lond A (2003)
2568 E Kuhl and P Steinmann
Muller I 1994 Grundzuge der Thermodynamik Springer
Runesson K 1978 On nonlinear consolidation of soft clay PhD thesis Department of StructuralMechanics Chalmers University of Technology Goteborg Sweden
Schrodinger E 1944 What is life Cambridge University Press
Taber L A 1995 Biomechanics of growth remodeling and morphogenesis Appl Mech Rev48 487545
Truesdell C amp Toupin R 1960 The classical macreld theories In Handbuch der Physik (edS Flugge) vol 3 Springer
Wu T Hutter K amp Svendsen B 1998 On shear deg ow of a saturated icesediment mixture withthermodynamic equilibrium pressure and momentum exchange Proc R Soc Lond A 4547188
Proc R Soc Lond A (2003)

2548 E Kuhl and P Steinmann
more recently by Wu et al (1998) de Boer (2000) Diebels (2000) Ehlers (2002)or Humphrey amp Rajagopal (2002) Every individual component of the mixture canbe interpreted locally as an open system undergoing a thermomechanical exchangewith the `outside worldrsquo represented by the remaining constituents of the mixture(see for example Haupt 2000) The loss or gain of mass of one constituent is thuscompensated by the others while the overall mass of the mixture itself remains con-stant The `theory of mixturesrsquo is based on the fundamental assumption that theindividual constituents are superposed locally at each point in space However if theindividual components are spatially separated and the overall behaviour is primarilydetermined by one constituent alone it seems reasonable to conmacrne attention to onlya part of the overall matter present by making use of the `theory of open systemsrsquo
Following the line of thought introduced by Maugin (1999 x 21) an open systemcan be understood as being enclosed by a permeable deformable and diathermalmembrane through which an exchange of mass momentum energy and entropy cantake place In the context of biomechanics the macrrst model allowing for this typeof exchange in terms of volume contributions was introduced by Cowin amp Hegedus(1976) under the name of the `theory of adaptive elasticityrsquo A natural extension tothe additional surface degux terms has been presented recently by Epstein amp Maugin(2000) as the `theory of volumetric growthrsquo Proliferation hyperplasia hypertrophyand atrophy can be identimacred as typical sources of mass while the migration ormovement of cells is a classical example of a mass degux in biomechanical applications(see for example Taber 1995 Humphrey 2002)
A classical example in chemomechanics which can be found in nearly every text-book of mechanics is furnished by the motion of a burning body typically encoun-tered in rocket propulsion (see for example Truesdell amp Toupin 1960 x 155 Gold-stein 1950 x 16 Muller 1994 x 146 Haupt 2000 x 35) The open system of therocket consisting of the rocket hull plus the amount of fuel experiences a permanentloss of mass due to combustion and ejection Thus the balance of mass of the rocketstates that the time rate of change of the overall rocket mass m be in equilibriumwith the rate of mass ejection R
Dtm = R
whereby R 6 0 The `volume-specimacrcrsquo version of the balance of momentum balancesthe time rate of change of the overall momentum = m the velocity weightedby the actual mass m with the total force acting on it
Dt = with = clos ed + op en and op en = sup1op en + R
Herein clos ed denotes the standard mechanical forces The third term R explicitlyaccounts for the amount of momentum generated by the ejected mass leaving thesystem at the same velocity as the rocket itself while the second term sup1op en accountsfor the diregerence in the velocity of the ejection sup1 with respect to the rocket-headvelocity thus sup1op en = [sup1 iexcl ]R With the help of the demacrnition of the overall rocketmomentum as = m the `mass-specimacrcrsquo version of the balance of momentum canbe constructed by subtracting times the balance of mass from the volume-specimacrcversion
mDt = sup1 with sup1 = clos ed + sup1op en and sup1op en = [sup1 iexcl ]R
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2549
rsquo
F J DtF
B0 Bt
C
v
b
l
Figure 1 Kinematics
The force sup1op en responsible for changes in the rocket velocity is typically called`propulsive forcersquo or `rocket thrustrsquo
This contribution aims at providing a general framework for open-system thermo-dynamics Our primary goal is to derive the appropriate macreld equations in the formof the balance of mass momentum energy and entropy to determine the macrelds of thedensity motion and temperature as a function of time To keep the underlying theoryas general as possible mass exchanges are allowed to take place through the in- oroutdegux of matter via the domain boundary and through the creation of mass withinthe domain itself The impact of these mass exchanges on the remaining balanceequations is explored by distinguishing strictly between the `volume-specimacrcrsquo andthe `mass-specimacrcrsquo format as illustrated in the model problem of rocket propulsionAs indicated in the example the local changes in mass manifest themselves in twocontributions one assuming that the newly generated mass carries the same amountof mass-specimacrc momentum energy and entropy as the original substrate the otheraccounting for a possible diregerence in these quantities While the volume-specimacrcformat contains both types of terms the mass-specimacrc balance equations are freefrom all the explicit mass-dependent terms and only account for the latter contribu-tion Consequently the mass-specimacrc balance equations take the familiar structuretypically encountered in classical thermodynamics
This paper is organized as follows Section 2 demacrnes the basic notation and reiter-ates the relevant kinematic relations The balance of mass the fundamental equationof open-system thermodynamics is introduced in x 3 Section 4 illustrates the indegu-ence of the enhanced mass balance on the balance of momentum which is discussed inthe volume-specimacrc and in the mass-specimacrc formats The balance of angular momen-tum and the balance of kinetic energy follow as natural byproducts In x 5 the bal-ance of total and internal energy are derived Section 6 is dedicated to the balance ofentropy which macrnally lends itself to the ClausiusDuhem inequality placing furtherrestrictions to the constitutive assumptions The evaluation of the ClausiusDuheminequality is illustrated in x 7 for the model problem of thermo-hyperelasticity
2 Kinematics
The kinematic description is based on the spatial-motion map
x = rsquo(X t) B0 Bt (21)
mapping the material placement X of a physical particle in the material conmacrgurationB0 to its spatial placement x in the spatial conmacrguration Bt (see macrgure 1) The related
Proc R Soc Lond A (2003)
2550 E Kuhl and P Steinmann
spatial-deformation gradient F and its Jacobian J
F = rXrsquo(X t) T B0 TBt J = det F gt 0 (22)
demacrne the linear tangent map from the material tangent space TB0 to the spatialtangent space TBt Typically the right and left CauchyGreen strain tensors C andb
C = F t cent F b = F cent F t (23)
or their inverses B = Ciexcl1 and c = biexcl1 are introduced as characteristic strainmeasures Moreover we shall distinguish between the material time derivative Dt =tfdeggjX of mass-specimacrc quantity fdegg at macrxed material placement X and the spatialtime derivative dt = tfdeggjx at macrxed spatial placement x The material and thespatial time derivative of any scalar- or vector-valued mass-specimacrc quantity fdegg arerelated via the Euler theorem
Dtfdegg = dtfdegg + rxfdegg cent v (24)
through the convective term rxfdegg cent v The spatial velocity v is introduced as thematerial time derivative of the spatial-motion map rsquo
v = Dtrsquo(X t) (25)
Its material gradient rXv is identical to the material time derivative of the spatial-deformation gradient F while the spatial-velocity gradient rxv will be denoted asl in the following equation
DtF = rXv l = rxv (26)
With these demacrnitions at hand the material time derivative of the Jacobian J can beexpressed through the well-known Euler identity DtJ = J div v with div v = F iexclt DtF denoting the spatial divergence of the spatial velocity v In the following wewill distinguish between volume-specimacrc scalar-valued or tensorial quantities withmaterial reference fdegg0 = raquo 0fdegg and with spatial reference fdeggt = raquo tfdegg wherebyfdegg denotes the mass-specimacrc density The integration of a quantity with materialreference over the material domain B0 yields the identical result as the integrationof a quantity with spatial reference over the spatial domain Bt
Z
B0
fdegg0 dV =Z
Bt
fdeggt dv (27)
The local counterpart of the above equation demacrnes the classical relation betweenvolume-specimacrc material and spatial quantities
fdegg0 = Jfdeggt (28)
Correspondingly we can relate any vector- or tensor-valued surface degux fcurreng throughthe boundary of the material domain B0 to the corresponding contribution fsectgthrough the spatial boundary Bt
Z
B0
fcurreng cent dA =Z
Bt
fsectg cent da (29)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2551
rsquo
F J DtF
B0 Bt
raquo 0
R
R0
raquo t
r
Rt
Figure 2 Balance of mass densities deg uxes and sources
By making use of the classical Nanson formula from 1878 as da = JF iexclt cent dA weobtain the local counterpart of the above equation
fcurreng = Jfsectg cent F iexclt (210)
a relation between the material and the spatial surface deguxes which can alternativelybe expressed as Divfcurreng = J divfsectg Moreover we will make use of the diregerentialform of Reynoldsrsquos transport theorem
jDtfdegg0 = dtfdeggt + div(fdeggt laquo v) (211)
which follows from the above considerations It states that the material time rateof change of the volume-specimacrc quantity fdegg0 in a material domain B0 is equal tothe spatial time rate of change of the volume-specimacrc quantity fdeggt in the spatialdomain Bt plus the degux fdeggt laquo v through the surface Bt of the moving domainWhile Reynoldsrsquos transport theorem (211) will later on be applied to relate spatialand material quantities in the volume-specimacrc format the Euler theorem (24) willserve to relate the corresponding mass-specimacrc quantities
With the introduced demacrnitions at hand we will now elaborate the balance equa-tions for open systems For the sake of transparency we shall assume that suplusmncientsmoothness criteria are fulmacrlled by the related macrelds of the balanced quantity itselffdegg0 or fdeggt the related deguxes fcurreng and fsectg and the corresponding source termsfmacrg0 and fmacrgt Consequently instead of analysing the global or integral form of thebalance laws
Dt
Z
B0
fdegg0 dV =Z
B0
fcurreng cent dA +Z
B0
fmacrg0 dV
dt
Z
Bt
fdeggt dv +Z
Bt
[fdeggt laquo v] cent da =Z
Bt
fsectg cent da +Z
Bt
fmacrgt dv
9gtgtgt=
gtgtgt(212)
we will restrict ourselves to their local or rather diregerential format
Dtfdegg0 = Divfcurreng + fmacrg0
dtfdeggt + div(fdeggt laquo v) = divfsectg + fmacrgt
)
(213)
3 Balance of mass
In classical non-relativistic mechanics of closed systems the quantity of matter in abody B0 does not change irrespective of the motion the deformation and the accel-eration of the body However this conservation of mass is a mere demacrnition which is
Proc R Soc Lond A (2003)
2552 E Kuhl and P Steinmann
no longer valid for open systems like the ones considered here In abstract terms thelocal balance of mass of open systems states that the rate of change of the materialor spatial density raquo 0 or raquo t is equal to the sum of the divergence of the related massdegux R or r and the mass source R0 or Rt (see macrgure 2) Note that most existingtheories for open systems except for the one developed by Epstein amp Maugin (2000)a priori exclude the in- or outdegux of mass as R = 0 and r = 0 The leaching of port-landite or the progressive decalcimacrcation of the calcium silicate hydrates in concretefurnish typical examples of an outdegux of mass in chemomechanical applications Cellmigration is another example of a mass degux typically encountered in biomechanicalproblems In principle it always is possible to express any degux term R or r throughan equivalent source term of the form Div R or div r according to the `equivalence ofsurface and volume sourcesrsquo as stated by Truesdell amp Toupin (1960 x 157) Howeverwe shall allow for independent degux terms in the following to keep the underlyingtheory as general as possible Consequently the material version of the balance ofmass can be stated as
Dt raquo 0 = Div R + R0 (31)
The individual terms in the above equation can be pushed forward with the help ofthe standard Piola transforms
raquo 0 = J raquo t R0 = JRt R = Jr cent F iexclt (32)
Note that in classical continuum mechanics with R = 0 and R0 = 0 equa-tion (32)1 is usually referred to as the `material continuity equationrsquo The applicationof Reynoldsrsquos transport theorem (211)
jDt raquo 0 = dt raquo t + div( raquo tv) (33)
introduces the spatial version of the balance of mass
dt raquo t + div( raquo tv) = div r + Rt (34)
Equation (34) which was introduced as the `spatial continuity equationrsquo by Euler in1757 represents one of the basic equations in classical deguid mechanics in the contextof closed systems with r = 0 and Rt = 0 In the following we shall distinguishbetween the material and the spatial version of the balance of mass given in theform
Dt raquo 0 = Div R + R0 dt raquo t + div( raquo tv) = div r + Rt (35)
Remark 31 (volume- and mass-specimacrc formats) In the present theorythe balance of mass plays a central role since it can essentially be used to transformthe volume-specimacrc version of any other balance law to its mass-specimacrc counterpartIn the volume-specimacrc format the quantity to be balanced can either be given withmaterial or spatial reference as fdegg0 = raquo 0fdegg or fdeggt = raquo tfdegg It is balanced withthe sum of the divergence of the corresponding deguxes fcurreng and fsectg and the volumesources fmacrg0 and fmacrgt
Dtfdegg0 = Divfcurreng + fmacrg0 dtfdeggt + div(fdeggt laquo v) = divfsectg + fmacrgt (36)
The material and spatial versions of a balance law (36)1 and (36)2 respectivelyare related through the corresponding Piola transforms fdegg0 = Jfdeggt fmacrg0 = Jfmacrgt
and fcurreng = Jfsectg cent F iexclt in combination with Reynoldsrsquos transport theorem (211)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2553
rsquo
F J DtF
B0 Bt
p0
brvbar t
b0
pt
frac14 t
bt
Figure 3 Balance of momentum momentum densities deg uxes and sources
Note that the deguxes fcurreng and fsectg can be expressed in terms of the reduced deguxterms f sup1curreng and fsup1sectg in the form
fcurreng = fsup1curreng + fdegg laquo R fsectg = fsup1sectg + fdegg laquo r (37)
Correspondingly the volume-specimacrc source terms are demacrned in terms of the reducedsource terms fsup1g0 and fsup1gt
fmacrg0 = fsup1g0 + fdeggR0 iexcl rXfdegg cent R fmacrgt = fsup1gt + fdeggRt iexcl rxfdegg cent r (38)
Each balance law can thus be transformed into a mass-specimacrc version balancingthe rate of change of the mass-specimacrc quantity fdegg = fdegg0=raquo 0 or fdegg = fdeggt=raquo t withthe corresponding reduced degux f sup1curreng and fsup1sectg and the reduced source terms fsup1g0
and fsup1gt The mass-specimacrc balance equations can be derived by subtracting fdeggtimes the balance of mass (35) from the corresponding volume-specimacrc version (36)Consequently we obtain remarkably simple generic forms of the mass-specimacrc balancelaws
raquo 0 Dtfdegg = Divfsup1curreng + fsup1g0 raquo t dtfdegg + raquo tv cent rxfdegg = divfsup1sectg + fsup1gt (39)
which are related through the Piola transforms fdegg0 = Jfdeggt fsup1g0 = Jfsup1gt andf sup1curreng = Jfsup1sectg cent F iexclt and the Euler theorem (24) Note that the mass-specimacrc formatis free from all the explicit extra terms caused by the changes in mass Howeverthis is not the case in the formulation developed by Epstein amp Maugin (2000) wherethe gradient terms rXfdegg cent R and rxfdegg cent r are part of the mass-specimacrc balanceequation (39)
4 Balance of momentum
Bearing in mind the derivation of the generic balance laws of the preceding sectionwe now elaborate their specimacrcation to yield the balance of linear momentum It willturn out that the balance of angular momentum and the balance of kinetic energy canbe interpreted as particular weighted versions of the balance of linear momentum
(a) Volume-specimacrc version
The balance of momentum represents one of the `laws of classical mechanicsrsquo Forclosed systems it was macrrst specimacred by Euler in 1776 It states that in an inertialframe the reaction of any body is equal to the load acting upon it Therein thereaction is characterized through the volume-specimacrc momentum density p0 or pt
Proc R Soc Lond A (2003)
2554 E Kuhl and P Steinmann
canonically demacrned as a spatial covector given through the partial derivative of thevolume-specimacrc kinetic-energy density K0 or Kt
K0 = 12raquo 0v cent v Kt = 1
2raquo tv cent v (41)
with respect to the spatial velocity v
p0 = v K0 = raquo 0v pt = v Kt = raquo tv (42)
The load can essentially be divided into two types namely the contact or surfaceforces represented by the momentum deguxes brvbar t and frac14 t and the at-a-distance forcesie the momentum sources b0 and bt (see macrgure 3) Consequently the material versionof the volume-specimacrc balance of momentum sometimes also referred to as `Cauchyrsquosmacrrst law of motionrsquo can be expressed as
Dtp0 = Div brvbar t + b0 (43)
In honour of the work of Piola in 1833 and Kirchhoreg in 1852 the momentum degux brvbar t
is typically referred to as the macrrst PiolaKirchhoreg stress tensor in classical continuummechanics With the help of the well-known Piola transforms
p0 = Jpt b0 = Jbt brvbar t = J frac14 t cent F iexclt (44)
the individual terms of equation (43) can be pushed forward to the spatial conmacrgu-ration The corresponding momentum degux frac14 t is commonly denoted as the Cauchystress tensor in standard continuum mechanics commemorating the early work ofCauchy in 1823 The application of Reynoldsrsquos transport theorem (211)
jDtp0 = dtpt + div(pt laquo v) (45)
yields the spatial version of the balance of momentum
dtpt + div(pt laquo v) = div frac14 t + bt (46)
which is typically applied in classical deguid mechanics The overall degux term frac14 t iexclpt laquo v redegects the convective nature of the above equation through the transport oflinear momentum pt laquo v In summary we distinguish between the material and thespatial version of the volume-specimacrc balance of momentum
Dtp0 = Div brvbar t + b0 dtpt + div(pt laquo v) = div frac14 t + bt (47)
On the Neumann boundary characterized through the material and spatial normalN and n the normal projections of the momentum deguxes of PiolaKirchhoreg andCauchy type brvbar t and frac14 t are required to be in equilibrium with the correspondingclosed- and open-system stress-vector contributions tclos ed
0 or tclos edt and top en
0 ortop en
t respectively
brvbar t cent N = tclos ed0 + t op en
0 top en0 = sup1t op en
0 + [p laquo R] cent N
frac14 t cent n = tclos edt + t op en
t top ent = sup1t op en
t + [p laquo r] cent n
)
(48)
Correspondingly the momentum sources terms b0 and bt can be understood as thesum of the closed- and the open-system volumeforce contributions bclos ed
0 or bclos edt
and bop en0 or bop en
t
b0 = bclos ed0 + bop en
0 bop en0 = sup1bop en
0 + pR0 iexcl rXp cent R
bt = bclos edt + bop en
t bop ent = sup1bop en
t + pRt iexcl rxp cent r
)
(49)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2555
While the expressions in terms of R r R0 and Rt take into account the part ofthe newly created or indegowing mass that carries the same amount of mass-specimacrcmomentum p as the original substrate the additional terms sup1t op en
0 sup1t op ent sup1b op en
0 andsup1b op en
t account for a possible diregerence in the momentum density
Remark 41 (balance of angular momentum) The volume-specimacrc angular-momentum density l0 or lt is demacrned through the vector product of the correspondinglinear momentum density p0 or pt with a distance vector a = rsquo iexcl rsquo0 from a macrxedpoint rsquo0 in space
l0 = a pound p0 lt = a pound pt (410)
In the absence of distributed couples and internal rotational degrees of freedom thevolume-specimacrc balance of angular momentum for open systems can be derived bytaking the vector product of the volume-specimacrc momentum balance (47) with thedistance vector a
a pound Dtp0 = a pound Div brvbar t + a pound b0 (411)
With the demacrnition of the angular momentum (410) the above equation can berewritten as
Dtl0 = Div(a pound brvbar t) + a pound b0 iexcl F pound brvbar t (412)
Thereby the vector product of the two second-order tensors iexcl F pound brvbar t can beexpressed in terms of the axial vector of the related second-order tensor [F cent brvbar ]axlas iexcl F pound brvbar t = 2[F cent brvbar ]axl It proves convenient for later purposes to reformulate theabove statement in terms of the reduced momentum degux sup1brvbar t = brvbar t iexcl p laquo R andthe reduced momentum source sup1b0 = b0 iexcl pR0 + rXp cent R
Dtl0 = Div(a pound [ sup1brvbar t +p laquoR])+a pound [sup1b0 +pR0 iexcl rXp cent R] iexcl F pound [ sup1brvbar t +plaquoR] (413)
Herein the third term on the right-hand side
iexcl F pound [ sup1brvbar t + p laquo R] = 2[F cent [ sup1brvbar + R laquo p]]axl
represents the volume-specimacrc production of the angular momentum l0 Anticipatinglater considerations we would like to point out that assuming the symmetry of thereduced momentum degux F cent sup1brvbar = sup1brvbar t cent F t or equivalently sup1frac14 = sup1frac14 t the production ofangular momentum reduces to 2[F cent [R laquo p]]axl or 2[r laquo p]axl respectively
Remark 42 (balance of kinetic energy) Although the balance of kineticenergy does not constitute an independent balance law it proves signimacrcant to takea closer look at it since it will help to introduce work conjugate stress and strainmeasures Moreover the balance of kinetic energy will be used to identify the externaland internal mechanical power which are essential for our further thermodynamicalconsiderations The starting point is the material time derivative of the volume-specimacrc kinetic-energy density K0 = 1
2raquo 0v cent v
DtK0 = raquo 0 DtK + K Dt raquo 0 = p0 cent Dtv + K Dt raquo 0 = v cent Dtp0 iexcl K Dt raquo 0 (414)
With the projection of the volume-specimacrc balance of momentum (43) with the spa-tial velocity v and the balance of mass (35)1 weighted by the mass-specimacrc kinetic-energy density K
v cent Dtp0 = Div(v cent brvbar t) + v cent b0 iexcl rXv brvbar t
KDt raquo 0 = Div(KR) + KR0 iexcl rXK cent R
)
(415)
Proc R Soc Lond A (2003)
2556 E Kuhl and P Steinmann
equation (414) can be rewritten in the explicit form
DtK0 = Div(v cent brvbar t iexcl KR) + v cent b0 iexcl KR0 + rXK cent R iexcl brvbar t DtF (416)
In what follows it will prove convenient to reformulate the above equation in terms ofthe reduced momentum degux sup1brvbar t = brvbar t iexcl p laquo R and the reduced momentum sourcesup1b0 = b0 iexcl pR0 + rXp cent R which can be related to their overall counterparts brvbar t andb0 through the following identities
Div(v cent brvbar t) = Div(v cent sup1brvbar t) + Div(2KR)
v cent b0 = v cent sup1b0 + 2KR0 iexcl v cent rXp cent R
brvbar t DtF = sup1brvbar t DtF + p cent rXv cent R
9gtgt=
gtgt(417)
With the help of the above equations and the identity v cent rX p + p cent rXv = 2rXKfollowing from v cent p = 2K equation (416) can be reformulated in the following way
DtK0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R iexcl sup1brvbar t DtF (418)
As stated by Stokes in 1857 the rate of change of the kinetic energy is equal to theexternal mechanical power minus the internal mechanical power Consequently theright-hand side of the above equation enables the identimacrcation of the volume-specimacrcexternal and internal mechanical power pext
0 and pin t0
pext0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R
pin t0 = sup1brvbar t DtF
)(419)
whereby pext0 characterizes the total rate of working of mechanical actions on the
body This rate of working consists of the degux contribution v cent sup1brvbar t + KR and thesource term v cent sup1b0 + KR0 iexcl rXK cent R The internal mechanical power pin t
0 consistsexclusively of the production term for the kinetic energy as sup1brvbar t DtF The demacrnitionof the latter suggests the interpretation of the reduced momentum degux sup1brvbar t and thematerial time derivative of the deformation gradient DtF as work conjugate pairsWith the above abbreviations at hand the balance of kinetic energy can be rewrittenin a form which has been denoted as the local form the `theorem of energyrsquo by Maugin(1993)
DtK0 = pext0 iexcl pin t
0 dtKt + div(Ktv) = pextt iexcl pin t
t (420)
The spatial version of the balance of kinetic energy (420)2 follows naturally byapplying the appropriate Piola transforms K0 = JKt
pext0 = Jpext
t and pin t0 = Jpin t
t along with Reynoldsrsquos transport theorem (211)
(b) Mass-specimacrc version
The mass-specimacrc version of the balance of momentum is based on the mass-specimacrckinetic-energy density
K = 12v cent v (421)
demacrning the quantity to be balanced as its partial derivative with respect to thespatial velocity v
p = v K = v (422)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2557
The rate of change of the mass-specimacrc momentum density p ie the covariant spatialvelocity is balanced with the reduced momentum deguxes sup1brvbar t or sup1frac14 t and the reducedmomentum sources sup1b0 or sup1bt By subtracting the balance of mass (35) weighted bythe momentum density p from the volume-specimacrc momentum balance (47) we canderive the diregerent versions of the mass-specimacrc momentum balance
raquo 0Dtp = Div sup1brvbar t + sup1b0 raquo t dtp + raquo tv cent rxp = div sup1frac14 t + sup1bt (423)
The reduced momentum deguxes sup1brvbar t and sup1frac14 t which are related to the overall momen-tum deguxes brvbar t and frac14 t through sup1brvbar t = brvbar t iexcl p laquo R and sup1frac14 t = frac14 t iexcl p laquo r are deter-mined by the closed- and open-system stress-vector contributions tclos ed
0 and sup1t op en0
or tclos edt and sup1t op en
t respectively on the Neumann boundary
sup1brvbar t cent N = tclos ed0 + sup1t op en
0
sup1frac14 t cent n = tclos edt + sup1t op en
t
)(424)
while the reduced momentum sources sup1b0 and sup1bt are given as the sum of the classicalclosed-system volume force contributions bclos ed
0 or bclos edt and the reduced open-
system contributions sup1b op en0 or sup1b op en
t
sup1b0 = bclos ed0 + sup1bop en
0
sup1bt = bclos edt + sup1bop en
t
)(425)
Note that the mass-specimacrc momentum balance (423) is free from all the explicitextra terms caused by the changes in mass The indeguence of the open system mani-fests itself only implicitly through the prescribed boundary terms sup1t op en
0 and sup1t op ent and
the prescribed volume sources sup1b op en0 and sup1b op en
t The convective indeguence introducedthrough the raquo tv cent rxp term however is also present in the closed-system case
Remark 43 (balance of angular momentum) The mass-specimacrc angular-momentum density l is given as the vector product of the mass-specimacrc momentumdensity p with the distance vector a = rsquo iexcl rsquo0
l = a pound p (426)
Consequently the mass-specimacrc version of the balance of angular momentum followsfrom the vector product of the mass-specimacrc momentum balance (423) with thedistance vector a
a pound raquo 0Dtp = a pound Div sup1brvbar t + a pound sup1b0 (427)
By making use of the demacrnition (426) the above equation can be rewritten as
raquo 0Dtl = Div(a pound sup1brvbar t) + a pound sup1b0 iexcl F pound sup1brvbar t (428)
Again the third term on the right-hand side iexcl F pound sup1brvbar t = 2[F cent sup1brvbar ]axl representsthe production of the mass-specimacrc angular momentum l If we require the balanceof angular momentum to represent an individual independent statement
raquo 0Dtl = Div(a pound sup1brvbar t) + a pound sup1b0 (429)
this production term has to vanish identically This condition thus reveals the sym-metry requirements
F cent sup1brvbar = sup1brvbar t cent F t sup1frac14 = sup1frac14 t (430)
Proc R Soc Lond A (2003)
2558 E Kuhl and P Steinmann
The material and the spatial versions (430)1 and (430)2 respectively are relatedthrough the corresponding Piola transform sup1brvbar t = J sup1frac14 t cent F iexclt A comparison of thevolume-specimacrc statement (413) with its mass-specimacrc counterpart (429) indicatesthat the in- or outdegux of mass R or r produces an additional amount of angularmomentum unless
F cent R laquo p = p laquo R cent F t r laquo p = p laquo r (431)
ie the mass degux F centR or r is constitutively demacrned to be coaxial to the mass-specimacrcmomentum density p
Remark 44 (balance of kinetic energy) To investigate the mass-specimacrc ver-sion of the balance of kinetic energy we need to evaluate the material time derivativeof the mass-specimacrc kinetic-energy density K = 1
2v centv which can easily be derived by
subtracting the weighted balance of mass (415)2 from the material time derivativeof the volume-specimacrc kinetic-energy density K0 given in equation (418) as
raquo 0 DtK = DtK0 iexcl K Dt raquo 0 (432)
and thusraquo 0 DtK = Div(v cent sup1brvbar t) + v cent sup1bext
0 iexcl sup1brvbar t DtF (433)
Consequently we can identify the mass-specimacrc external and internal mechanicalpower sup1pext
0 and sup1pin t0 respectively
sup1pext0 = pext
0 iexcl KDt raquo 0 = Div(v cent sup1brvbar t) + v cent sup1b0
sup1pin t0 = pin t
0 = sup1brvbar t DtF
)(434)
It is worth noting that the diregerence of the mass- and volume-specimacrc formu-lation manifests itself only in the demacrnition of the external mechanical powersup1pext
0 = pext0 iexcl KDt raquo 0 while the mass-specimacrc internal power is identical to its volume-
specimacrc counterpart as sup1pin t0 = pin t
0 Consequently the material and the spatial versionof the mass-specimacrc balance of kinetic energy take the formats
raquo 0 DtK = sup1pext0 iexcl sup1pin t
0 raquo t dtK + raquo tv cent rxK = sup1pextt iexcl sup1pin t
t (435)
whereby both formulations are related through the corresponding Piola transformswith sup1pext
0 = J sup1pextt and sup1pin t
0 = Jsup1pin tt and the Euler theorem (24)
5 Balance of energy
The balance of total energy as a representation of the macrrst law of thermodynamicsbalances the rate of change of the volume-specimacrc total energy density E0 or Et asthe sum of the kinetic and internal energy density E0 = K0 + I0 or Et = Kt + It
with the external power In classical continuum mechanics of closed systems thisexternal power is composed of a purely mechanical contribution pext
0 or pextt and a
non-mechanical thermal contribution qext0 or qext
t Therefore the balance of energy issometimes referred to as the `principle of interconvertibility of heat and mechanicalworkrsquo a notion which was known to Carnot in 1832 and experimentally verimacredby Joule in 1843 However when dealing with open systems we have to generalizethe demacrnition of the non-mechanical external power by including additional externalopen-system contributions in the demacrnition of qext
0 and qextt (cf Malvern 1969 x 54)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2559
rsquo
F J DtF
B0 Bt
E0
v cent brvbar t Q
v cent b0 Q0
Et
v cent frac14 t q
v cent bt Qt
Figure 4 Balance of energy energy densities deg uxes and sources
(a) Volume-specimacrc version
For the spatial-motion problem the rate of change of the volume-specimacrc totalenergy density E0 = raquo 0E can be expressed in the form (cf macrgure 4)
DtE0 = Div(v cent sup1brvbar t iexcl sup1Q + ER) + v cent sup1b0 + sup1Q0 + ER0 iexcl rXE cent R (51)
Thereby in addition to the purely mechanical external power pext0 demacrned in equa-
tion (419) we have included the non-mechanical external power qext0 accounting
for the classical thermal eregects of the closed system and the additional open-systemeregects as an additional non-mechanical supply of energy
qext0 = Div( iexcl Q) + Q0 (52)
Similar to the mechanical power the non-mechanical power consists of a degux and asource contribution denoted by Q and Q0 respectively The former is composed ofthe reduced outward non-mechanical energy degux sup1Q modimacred by the explicit extradegux due to the open system IR while the latter is the sum of the reduced non-mechanical energy source sup1Q0 enhanced by the explicit eregects of the open systemIR0 and rXI cent R
pext0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R
qext0 = Div( iexcl sup1Q + IR) + sup1Q0 + IR0 iexcl rXI cent R
)
(53)
Equation (51) can thus be reformulated in the concise form
DtE0 = pext0 + qext
0 dtEt + div(Etv) = pextt + qext
t (54)
which for the classical closed-system case dates back to the early works of Duhem in1892 Again the spatial version (54)2 follows from the appropriate Piola transformsE0 = JEt
pext0 = Jpext
t qext0 = Jqext
t Q = Jq cent F iexclt and sup1Q = J sup1q cent F iexclt along withReynoldsrsquos transport theorem (211) The demacrnition of the non-mechanical energydeguxes Q and q parallels the introduction of the macrrst PiolaKirchhoreg stress tensorbrvbar and the Cauchy stress frac14 On the Neumann boundary the non-mechanical energydeguxes Q and q are given in terms of the normal projection of the classical heat deguxdensities qclos ed
0 and qclos edt and the additional open-system contributions qop en
0 andqop en
t Q cent N = qclos ed
0 + qop en0 qop en
0 = sup1q op en0 iexcl IR cent N
q cent n = qclos edt + qop en
t qop ent = sup1q op en
t iexcl Ir cent n
)(55)
Proc R Soc Lond A (2003)
2560 E Kuhl and P Steinmann
Moreover the non-mechanical energy sources Q0 and Qt can be understood as thesum of the classical heat source Qclos ed
0 and Qclos edt and an additional non-mechanical
energy source taking into account the nature of the open system Qop en0 and Qop en
t
Q0 = Qclos ed0 + Qop en
0 Qop en0 = sup1Qop en
0 + IR0 iexcl rXI cent R
Qt = Qclos edt + Qop en
t Qop ent = sup1Qop en
t + IRt iexcl rxI cent r
)(56)
In formal analogy to the demacrnition of the momentum quantities the expressions interms of R r R0 and Rt take into account the part of the newly added mass thatcarries the same amount of non-mechanical energy as the original substrate while theadditional open-system terms sup1q op en
0 sup1q op ent sup1Qop en
0 and sup1Qop ent account for a possible
diregerence in non-mechanical energy
Remark 51 (balance of internal energy) For further thermodynamical con-siderations it proves convenient to consider the volume-specimacrc internal energy den-sity I0 = E0 iexcl K0 or It = Et iexcl Kt given as the diregerence of the corresponding totalenergy density and the kinetic-energy density Consequently the two versions of thebalance of internal energy follow from subtracting the balance of kinetic energy (420)from the total energy balance (54)
DtI0 = pin t0 + qext
0 dtIt + div(Itv) = pin tt + qext
t (57)
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the equations derived above balances the mass-specimacrc energy density E = E0=raquo 0 with the mass-specimacrc external mechanical powersup1pext
0 introduced in (434) and the mass-specimacrc non-mechanical power sup1qext0 as
sup1qext0 = qext
0 iexcl IDt raquo 0 = iexcl Div sup1Q + sup1Q0 (58)
The corresponding balance equations
raquo 0 DtE = sup1pext0 + sup1qext
0 raquo t dtE + raquo tv cent rxE = sup1pextt + sup1qext
t (59)
follow from subtracting the corresponding balance of mass (35) weighted by the totalenergy E from the volume-specimacrc energy balance (54) The spatial version (59)2can be derived by applying the corresponding Piola transforms with sup1pext
0 = Jsup1pextt and
sup1qext0 = J sup1qext
t and the Euler theorem (24) Again we can relate the reduced energydeguxes sup1Q and sup1q demacrned through sup1Q = Q iexcl IR and sup1q = q iexcl Ir to the classical heatdegux qclos ed
0 or qclos edt and the energy degux caused by additional eregects of the open
system sup1q op en0 and sup1q op en
t
sup1Q cent N = qclos ed0 + sup1q op en
0
sup1q cent n = qclos edt + sup1q op en
t
)(510)
Moreover the reduced non-mechanical energy sources sup1Q0 and sup1Qt are given as the sumof the classical heat source of a closed system Qclos ed
0 and Qclos edt and the additional
open-system contribution to the energy sup1Qop en0 and sup1Qop en
t
sup1Q0 = Qclos ed0 + sup1Qop en
0
sup1Qt = Qclos edt + sup1Qop en
t
)(511)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2561
Again as opposed to the formulation developed by Epstein amp Maugin (2000) themass-specimacrc format is free from all the explicit extra terms caused by changes inmass and thus resembles the balance of energy known from classical mechanics
Remark 52 (balance of internal energy) A reduction to the balance ofinternal energy I = E iexcl K follows from subtracting the balance of kinetic energy(435) from the balance of total energy (59)
raquo 0 DtI = sup1pin t0 + sup1qext
0 raquo t dtI + raquo tv cent rxI = sup1pin tt + sup1qext
t (512)
6 Balance of entropy
The macrrst law of thermodynamics in the form of the balance of energy expressesthe interconvertibility of heat and work However the balance of energy itself doesnot place any restrictions on the direction of the thermodynamical process Thesecond law of thermodynamics the balance of entropy postulates the existence ofan absolute temperature and of a specimacrc entropy as a state function Through theinternal production of the latter which is required to either vanish for reversibleprocesses or be strictly positive for irreversible processes a direction is imposedon the thermodynamical process Recall that when dealing with open systems amacrxed material volume B0 is allowed to constantly gain or lose mass Open systemsnaturally exhibit an additional entropy degux and entropy source caused by the addedmass as pointed out earlier in the famous monograph by Schrodinger (1944 x 6) aswell as by Malvern (1969 x 56) or also recently by Epstein amp Maugin (2000) Theindeguence of changes in mass on the entropy is twofold On the one hand it is redegectedthrough the explicit open-system entropy degux SR and the related source terms SR0
and iexcl rXS cent R On the other hand we will introduce the reduced entropy degux andsource sup1H and sup1H0 respectively which in turn split into the extra non-mechanicalenergy terms sup1Q and sup1Q0 divided by the absolute temperature sup3 and an extra entropydegux and source S and S0 While the former parallel the introduction of the entropydegux and source in classical closed-system thermodynamics the contributions S andS0 account for the diregerence in entropy of the added mass and the original substrate
Remark 61 (balance of entropy versus entropy inequality) In the relatedliterature the entropy is often introduced through the entropy inequality For thesake of analogy we will treat the entropy as a balance quantity in the followingIts evolution is thus balanced with the sum of the external and internal entropyproduction whereby the latter is constrained to be non-negative throughout In thecase of closed-system thermodynamics this approach has been followed for exampleby Truesdell amp Toupin (1960 xx 256 and 257) Haupt (2000 x 33) or Liu (2002 x 5)
(a) Volume-specimacrc version
The balance of entropy balances the volume-specimacrc entropy density S0 = raquo 0S withthe external entropy input hext
0 and the internal entropy production hin t0 Thereby
the former consists of the entropy degux H across the material surface B0 and theentropy source H0 in the material domain B0 (cf macrgure 5)
hext0 = Div( iexcl H ) + H0 (61)
Proc R Soc Lond A (2003)
2562 E Kuhl and P Steinmann
rsquo
F J DtF
B0 Bt
S0
H S
H0 S0
St
h s
Ht St
Figure 5 Balance of entropy entropy densities deg uxes and sources
The external entropy degux H is introduced as the sum of the reduced external entropydegux sup1H enhanced by the explicit open-system contribution SR Accordingly theexternal entropy source H0 consists of the reduced entropy source sup1H0 modimacred byadditional terms SR0 and iexcl rXS cent R accounting for the explicit open-system con-tribution to the entropy supply
hext0 = Div( iexcl sup1H + SR) + sup1H0 + SR0 iexcl rXS cent R
hin t0 gt 0
)(62)
Just like in classical thermodynamics of closed systems the internal entropy produc-tion hin t
0 is required to be point-wise non-negative The balance of entropy can thusbe expressed in the following form
DtS0 = hext0 + hin t
0 dtSt + div(Stv) = hextt + hin t
t (63)
Again the material and the spatial version are related through the correspond-ing Piola transforms S0 = JSt
hext0 = Jhext
t hin t0 = Jhin t
t H = Jh cent F iexclt andsup1H = J sup1h cent F iexclt in combination with Reynoldsrsquos transport theorem Note that alter-
natively the balance of entropy which is primarily nothing but a formal demacrnitionof the entropy production can be recast into the inequality DtS0 iexcl hext
0 gt 0 Thiscondition which is typically referred to as `postulate of irreversibilityrsquo in classicalthermodynamics (see Truesdell amp Toupin 1960 x 258) induces a direction to thethermodynamic process Next we will introduce Neumann boundary conditions forthe spatial-motion Kirchhoreg and Cauchy type entropy degux H and h in terms of theclassical closed-system entropy degux contribution hclos ed
0 or hclos edt and the additional
open-system contribution hop en0 or hop en
t
H cent N = hclos ed0 + hop en
0 hop en0 = sup1hop en
0 iexcl SR cent N
h cent n = hclos edt + hop en
t hop ent = sup1hop en
t iexcl Sr cent n
)
(64)
Accordingly the entropy sources H0 and Ht are introduced as the sum of the classicalentropy source of the closed system Hclos ed
0 or Hclos edt and the additional entropy
source accounting for the nature of the open system Hop en0 or Hop en
t
H0 = Hclos ed0 + Hop en
0 Hop en0 = sup1Hop en
0 + SR0 iexcl rXS cent R
Ht = Hclos edt + Hop en
t Hop ent = sup1Hop en
t + SRt iexcl rxS cent r
)
(65)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2563
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the above equations states that the rate of changeof the mass-specimacrc entropy S = S0=raquo 0 is in equilibrium with the mass-specimacrcexternal entropy input sup1hext
0 and the mass-specimacrc internal entropy production sup1hin t0
which are introduced in the following way
sup1hext0 = hext
0 iexcl SDt raquo 0 = iexcl Div sup1H + sup1H0
sup1hin t0 = hin t
0 gt 0
)
(66)
The resulting material and spatial version of the balance of entropy
raquo 0 DtS = sup1hext0 + sup1hin t
0 raquo t dtS + raquo tv cent rxS = sup1hextt + sup1hin t
t (67)
which can be derived by subtracting S times the balance of mass (35) from thevolume-specimacrc balance of entropy (63) are related via the appropriate Piola trans-forms sup1hext
0 = Jsup1hextt and sup1hin t
0 = Jsup1hin tt and the Euler theorem (24) Moreover we can
relate the reduced entropy deguxes sup1H and sup1h demacrned through sup1H = H iexcl SR andsup1h = h iexcl Sr to the classical entropy degux of the closed system hclos ed
0 or hclos edt and
the entropy degux caused by additional eregects of the open system sup1hop en0 or sup1hop en
t
sup1H cent N = hclos ed0 + sup1hop en
0
sup1h cent n = hclos edt + sup1hop en
t
)(68)
Accordingly the reduced entropy sources sup1H0 = H0 iexcl SR0 + rXS cent R and sup1Ht = Ht iexclSRt + rxS cent r are given as the sum of the classical closed-system entropy sourceHclos ed
0 or Hclos edt and the additional open-system contribution to the entropy source
sup1Hop en0 or sup1Hop en
t sup1H0 = Hclos ed
0 + sup1Hop en0
sup1Ht = Hclos edt + sup1Hop en
t
)
(69)
Remark 62 (dissipation inequality) For further elaboration it proves con-venient to set up relations between the reduced entropy degux sup1H and the reducednon-mechanical energy degux sup1Q and between the reduced entropy source sup1H0 and thereduced non-mechanical energy source sup1Q0 in terms of the absolute temperature sup3 an extra entropy degux S and an extra entropy source S0
sup1H =1sup3
sup1Q + S sup1H0 =1sup3
sup1Q0 + S0 (610)
The above equations can be understood as a generalization of the ideas of Cowinamp Hegedus (1976) who have suggested including the additional entropy source S0
accounting for changes in entropy caused by changes in mass that are not consideredimplicitly through the changes in energy sup1Q0 Both the additional entropy degux S andthe entropy source S0 which we shall summarize in the term s
0 = iexcl Div S + S0 inthe following have to be determined constitutively These additional terms can beunderstood as an explicit representation of the exchange of entropy with the `outsideworldrsquo We now turn to the evaluation of the above-stated second law of thermo-dynamics by recasting it into an appropriate form of the dissipation inequality astatement that places further restrictions on the form of the constitutive response
Proc R Soc Lond A (2003)
2564 E Kuhl and P Steinmann
functions For this purpose we shall interpret the internal entropy production sup1hin t0 as
a measure for the degree of irreversibility introducing the dissipation rate sup1d0 as the
internal entropy production weighted by the absolute temperature as sup1d0 = sup3 sup1hin t
0 gt 0With the help of the balance of entropy (67)1 the relations (610) and the bal-ance of internal energy (512)1 the dissipation rate can be reformulated to yield theClausiusDuhem inequality in an internal energy based fashion
sup1d0 = sup1pin t
0 iexcl raquo 0Dt[I iexcl sup3 S ] iexcl raquo 0S Dt sup3 iexcl s0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (611)
By making use of the appropriate LegendreFenchel transform introducing theHelmholtz free energy ordf = I iexcl sup3 S we end up with the classical free-energy-basedversion of the ClausiusDuhem inequality
sup1d0 = sup1brvbar t DtF iexcl raquo 0 Dt ordf iexcl raquo 0S Dt sup3 iexcl s
0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (612)
which is particularly useful when the temperature sup3 rather than the entropy S isused as the independent variable In classical thermodynamics the ClausiusDuheminequality (612) is typically decomposed into a local and a conductive contributionsup1d loc
0 and sup1dcon0
sup1d loc0 = sup1brvbar t DtF iexcl raquo 0Dt ordf iexcl raquo 0SDt sup3 iexcl s
0 sup3 gt 0 sup1d con0 = iexcl sup1Q cent rX ln sup3 gt 0 (613)
whereby the local term sup1d loc0 gt 0 represents the ClausiusPlanck inequality for open
systems while the remaining conductive term sup1dcon0 gt 0 is typically referred to as a
Fourier inequality As a suplusmncient condition for sup1d0 gt 0 both inequalities are required
to hold separately In what follows we shall apply the dissipation inequality (613) toderive constitutive equations for the reduced momentum degux sup1brvbar t and the entropy SIn addition the evaluation of the dissipation inequality places further restrictions onthe extra entropy exchange s
0 The underlying procedure will be highlighted in detailfor the simple model problem of thermo-hyperelasticity in the following section
Remark 63 Note that at this stage the introduction of the reduced entropydegux and source sup1H = sup1Q=sup3 + S and sup1H0 = sup1Q0=sup3 + S0 as introduced in equations(610) is a mere constitutive assumption Nevertheless for particular constitutive-model problems the postulated relations can be verimacred through the evaluation ofthe dissipation inequality according to Muller (1973) and Liu (1972) (see also Liu2002) It will turn out that in most cases equations (610) are justimacred with thetrivial solution S = 0 and S0 = 0 However assuming this result from the veryoutset might be too restrictive for complex constitutive models as also pointed outby Epstein amp Maugin (2000)
7 Thermo-hyperelasticity
We are now in a position to exploit the second law of thermodynamics in the formof the ClausiusDuhem inequality along the lines of Coleman amp Noll (1963) Thestraightforward evaluation of the local part of the dissipation inequality in the formof the ClausiusPlanck inequality (613)1 will result in the demacrnition of the reducedmomentum degux sup1brvbar and the mass-specimacrc entropy density S Its conductive sup-plement (613)2 the Fourier inequality suggests the demacrnition of the reduced non-mechanical energy degux sup1Q along the lines of the classical linear heat conduction intro-duced by Fourier in 1822 Finally the mass degux R will be introduced constitutively
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2565
in the context of classical linear mass diregusion according to Fickrsquos law Here wewill thus restrict ourselves to a thermo-hyperelastic-model problem for which all thedissipation is caused exclusively by heat conduction and possibly by an additionalopen-system contribution of the `outside worldrsquo In what follows we shall make useof the multiplicative decomposition of the free energy ordf 0
ordf 0 = raquo 0 ordf (71)
Thereby the mass-specimacrc free-energy density ordf is expressed in terms of the materialdensity raquo 0 the deformation gradient F and the absolute temperature sup3 with a pos-sible explicit dependence on the material placement X Within the thermodynamicsof open systems the material density raquo 0 is allowed to vary in space and time is thusintroduced as function of the material placement X and the time t
ordf = ordf ( raquo 0 F sup3 X) raquo 0 = raquo 0(X t) (72)
Consequently the material time derivative of the free-energy density is formally givenin the form
Dt ordf = D raquo 0ordf Dt raquo 0 + DF ordf DtF + D sup3 ordf Dt sup3 (73)
The evaluation of the ClausiusPlanck inequality (613)1
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 + [ sup1brvbar t iexcl raquo 0DF ordf ] DtF iexcl [ raquo 0S + raquo 0 D sup3 ordf ] Dt sup3 iexcl s0 sup3 gt 0 (74)
demacrnes the reduced macrrst PiolaKirchhoreg stress tensor sup1brvbar t and the mass-specimacrcentropy S as thermodynamically conjugate variables to the deformation gradientF and the absolute temperature sup3
sup1brvbar t = raquo 0 DF ordf S = iexcl D sup3 ordf (75)
As in Cowin amp Hegedus (1976) we are left with a reduced inequality of the form
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 iexcl s0 sup3 gt 0 (76)
In biomechanics the simplest choice for the free-energy function ordf for cellular mate-rials such as open-pored biological tissues is based on the classical isotropic Neo-Hookean-type free-energy function weighted by the actual relative density [ raquo 0=raquo curren
0]n
(see for example Carter amp Hayes 1977 Gibson amp Ashby 1997)
ordf =middot
raquo 0
raquo curren0
cedil[niexcl1] 1raquo curren
0
[12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]] (77)
Here para and middot denote the classical Lamparae constants and n is an additional exponentusually allowed to vary between 1 6 n 6 35 A selection of more advanced free-energy functions for orthotropic biological tissues can be found for example in therecent collection of publications by Cowin amp Humphrey (2001) The derivatives of thefree energy ordf with respect to the material density raquo 0 and the deformation gradientF take the format
D raquo 0ordf = [n iexcl 1]
middotraquo 0
raquo curren0
cedil[niexcl2]middot 1raquo curren
0
cedil2
[ 12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]]
DF ordf =middot
raquo 0
raquo curren0
cedil[niexcl1]middot 1raquo curren
0
cedil[ middot F + [ para ln J iexcl middot ]F iexclt]
9gtgtgtgt=
gtgtgtgt
(78)
Proc R Soc Lond A (2003)
2566 E Kuhl and P Steinmann
whereby the macrrst derivative can alternatively be expressed as D raquo 0ordf = [n iexcl 1] ordf =raquo 0
According to equation (75) the reduced macrrst PiolaKirchhoreg stress tensor
sup1brvbar t =middot
raquo 0
raquo curren0
cediln
[ middot F + [ para ln J iexcl middot ]F iexclt] (79)
can be understood as the classical Neo-Hookean stress tensor weighted by the actualrelative density [ raquo 0=raquo curren
0]n The reduced dissipation inequality
iexcl [n iexcl 1] ordf [Div R + R0] + sup3 [Div S iexcl S0] gt 0 (710)
places implicit restrictions on the dissipation generated by the density evolution Dt raquo 0
through the mass degux R and the mass source R0 This amount of dissipation hasat least to be compensated by an appropriate constitutive assumption for the extraexternal entropy input s
0 through the extra entropy degux S and the extra entropysource S0 eg
S = [n iexcl 1] ordf1sup3
R S0 = iexcl [n iexcl 1] ordf1sup3
R0 (711)
Similar to the context of chemomechanics the degux r or R is usually related to thespatial or material gradient of the density rx raquo 0 or rX raquo 0 as
r = R0b cent rx raquo 0 R = rtB cent rX raquo 0 (712)
in analogy to Fickrsquos law for concentrations Here R0 and rt denote the mass-conduction coeplusmncient introducing either a materially or a spatially isotropicresponse In the context of biomechanics we typically macrnd variations of the con-stitutive equation
R0 =middot
raquo 0
raquo curren0
cediliexclm
ordf 0 iexcl ordf curren0 (713)
for the mass source R0 where raquo curren0 and ordf curren
0 denote the reference density and the refer-ence free energy respectively while m is an additional exponent that is commonlychosen to m gt n (see Harrigan amp Hamilton 1993) Finally the evaluation of theFourier inequality (613)2 as sup1d con
0 = iexcl sup1Q cent rX ln sup3 gt 0 suggests the demacrnition of themass-specimacrc non-mechanical energy degux sup1q or sup1Q according to Fourierrsquos law as
sup1q = iexcl K0b cent rx sup3 sup1Q = iexcl ktB cent rX sup3 (714)
with K0 and kt denoting the materially or spatially isotropic conductivity In order toa priori guarantee the satisfaction of the Fourier inequality (613)2 the conductivityis required to be non-negative K0 gt 0 and kt gt 0
8 Conclusion
We have presented a general framework for the thermodynamics of open systemsThe derived macreld equations are believed to be particularly useful in biomechanicalor chemomechanical applications where attention is conmacrned to one individual sub-system of the overall matter present Due to the fact that this open subsystem isallowed to constantly gain or lose mass the balance of mass had to be enhancedby additional surface and volume terms redegecting the interaction with the `outsideworldrsquo Since the newly created mass carries a particular amount of momentum
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2567
energy and entropy all the other balance equations had to be reformulated as wellTo clarify the indeguence of the changes in mass we have introduced the notions of`volume-specimacrcrsquo and `mass-specimacrcrsquo formats The former accounts for the total indegu-ence of the changes in mass through explicit mass-dependent and additional implicitopen-system contributions The latter however is free from all the mass-dependentextra terms and thus takes the familiar structure known from classical continuumthermodynamics The mass-specimacrc format is believed to be particularly useful sinceit parallels the framework of the closed-system case Consequently permissible con-stitutive relations can be derived from the mass-specimacrc version of the dissipationinequality The underlying procedure has been illustrated for the model problem ofthermo-hyperelasticity
References
Bowen R M 1976 Theory of mixtures In Continuum physics vol III Mixtures and EM macreldtheories (ed A C Eringen) pp 1127 Academic
Carter D R amp Hayes W C 1977 The behavior of bone as a two-phase porous structure JBone Joint Surg Am 59 785794
Coleman B D amp Noll W 1963 The thermodynamics of elastic materials with heat conductionand viscosity Arch Ration Mech Analysis 13 167178
Cowin S C amp Hegedus D H 1976 Bone remodelling I Theory of adaptive elasticity JElastic 6 313326
Cowin S C amp Humphrey J D 2001 Cardiovascular soft tissue mechanics Dordrecht Kluwer
de Boer R 2000 Theory of porous media Springer
Diebels S 2000 Mikropolare Zweiphasenmodelle Formulierung auf der Basis der TheoriePoroser Medien Habilitationsschrift Bericht aus dem Institut fur Mechanik (Bauwesen)Nr II-4 Universitat Stuttgart
Ehlers W 2002 Foundations of multiphasic and porous materials In Porous media theoryexperiments and numerical applications (ed W Ehlers amp J Bluhm) pp 386 Springer
Epstein M amp Maugin G A 2000 Thermomechanics of volumetric growth in uniform bodiesInt J Plasticity 16 951978
Gibson L J amp Ashby M F 1997 The mechanics of three-dimensional cellular materials ProcR Soc Lond A 382 4359
Goldstein H 1950 Classical mechanics Addison-Wesley
Harrigan T P amp Hamilton J J 1993 Finite element simulation of adaptive bone remodellinga stability criterion and a time-stepping method Int J Numer Meth Engng 36 837854
Haupt P 2000 Continuum mechanics and theory of materials Springer
Humphrey J D 2002 Cardiovasular solid mechanics Springer
Humphrey J D amp Rajagopal K R 2002 A constrained mixture model for growth and remod-eling of soft tissues Math Models Meth Appl Sci 12 407430
Liu I S 1972 Method of Lagrange multipliers for exploitation of the entropy principle ArchRation Mech Analysis 46 131148
Liu I S 2002 Continuum mechanics Springer
Malvern L E 1969 Introduction to the mechanics of a continuous medium Englewood Clireg sNJ Prentice Hall
Maugin G A 1993 Material inhomogenities in elasticity London Chapman amp Hall
Maugin G A 1999 The thermomechanics of nonlinear irreversible behaviors World Scientimacrc
Muller I 1973 Thermodynamik die Grundlagen der Materialtheorie Dusseldorf BertelsmannUniversitatsverlag
Proc R Soc Lond A (2003)
2568 E Kuhl and P Steinmann
Muller I 1994 Grundzuge der Thermodynamik Springer
Runesson K 1978 On nonlinear consolidation of soft clay PhD thesis Department of StructuralMechanics Chalmers University of Technology Goteborg Sweden
Schrodinger E 1944 What is life Cambridge University Press
Taber L A 1995 Biomechanics of growth remodeling and morphogenesis Appl Mech Rev48 487545
Truesdell C amp Toupin R 1960 The classical macreld theories In Handbuch der Physik (edS Flugge) vol 3 Springer
Wu T Hutter K amp Svendsen B 1998 On shear deg ow of a saturated icesediment mixture withthermodynamic equilibrium pressure and momentum exchange Proc R Soc Lond A 4547188
Proc R Soc Lond A (2003)

Thermodynamics for open systems 2549
rsquo
F J DtF
B0 Bt
C
v
b
l
Figure 1 Kinematics
The force sup1op en responsible for changes in the rocket velocity is typically called`propulsive forcersquo or `rocket thrustrsquo
This contribution aims at providing a general framework for open-system thermo-dynamics Our primary goal is to derive the appropriate macreld equations in the formof the balance of mass momentum energy and entropy to determine the macrelds of thedensity motion and temperature as a function of time To keep the underlying theoryas general as possible mass exchanges are allowed to take place through the in- oroutdegux of matter via the domain boundary and through the creation of mass withinthe domain itself The impact of these mass exchanges on the remaining balanceequations is explored by distinguishing strictly between the `volume-specimacrcrsquo andthe `mass-specimacrcrsquo format as illustrated in the model problem of rocket propulsionAs indicated in the example the local changes in mass manifest themselves in twocontributions one assuming that the newly generated mass carries the same amountof mass-specimacrc momentum energy and entropy as the original substrate the otheraccounting for a possible diregerence in these quantities While the volume-specimacrcformat contains both types of terms the mass-specimacrc balance equations are freefrom all the explicit mass-dependent terms and only account for the latter contribu-tion Consequently the mass-specimacrc balance equations take the familiar structuretypically encountered in classical thermodynamics
This paper is organized as follows Section 2 demacrnes the basic notation and reiter-ates the relevant kinematic relations The balance of mass the fundamental equationof open-system thermodynamics is introduced in x 3 Section 4 illustrates the indegu-ence of the enhanced mass balance on the balance of momentum which is discussed inthe volume-specimacrc and in the mass-specimacrc formats The balance of angular momen-tum and the balance of kinetic energy follow as natural byproducts In x 5 the bal-ance of total and internal energy are derived Section 6 is dedicated to the balance ofentropy which macrnally lends itself to the ClausiusDuhem inequality placing furtherrestrictions to the constitutive assumptions The evaluation of the ClausiusDuheminequality is illustrated in x 7 for the model problem of thermo-hyperelasticity
2 Kinematics
The kinematic description is based on the spatial-motion map
x = rsquo(X t) B0 Bt (21)
mapping the material placement X of a physical particle in the material conmacrgurationB0 to its spatial placement x in the spatial conmacrguration Bt (see macrgure 1) The related
Proc R Soc Lond A (2003)
2550 E Kuhl and P Steinmann
spatial-deformation gradient F and its Jacobian J
F = rXrsquo(X t) T B0 TBt J = det F gt 0 (22)
demacrne the linear tangent map from the material tangent space TB0 to the spatialtangent space TBt Typically the right and left CauchyGreen strain tensors C andb
C = F t cent F b = F cent F t (23)
or their inverses B = Ciexcl1 and c = biexcl1 are introduced as characteristic strainmeasures Moreover we shall distinguish between the material time derivative Dt =tfdeggjX of mass-specimacrc quantity fdegg at macrxed material placement X and the spatialtime derivative dt = tfdeggjx at macrxed spatial placement x The material and thespatial time derivative of any scalar- or vector-valued mass-specimacrc quantity fdegg arerelated via the Euler theorem
Dtfdegg = dtfdegg + rxfdegg cent v (24)
through the convective term rxfdegg cent v The spatial velocity v is introduced as thematerial time derivative of the spatial-motion map rsquo
v = Dtrsquo(X t) (25)
Its material gradient rXv is identical to the material time derivative of the spatial-deformation gradient F while the spatial-velocity gradient rxv will be denoted asl in the following equation
DtF = rXv l = rxv (26)
With these demacrnitions at hand the material time derivative of the Jacobian J can beexpressed through the well-known Euler identity DtJ = J div v with div v = F iexclt DtF denoting the spatial divergence of the spatial velocity v In the following wewill distinguish between volume-specimacrc scalar-valued or tensorial quantities withmaterial reference fdegg0 = raquo 0fdegg and with spatial reference fdeggt = raquo tfdegg wherebyfdegg denotes the mass-specimacrc density The integration of a quantity with materialreference over the material domain B0 yields the identical result as the integrationof a quantity with spatial reference over the spatial domain Bt
Z
B0
fdegg0 dV =Z
Bt
fdeggt dv (27)
The local counterpart of the above equation demacrnes the classical relation betweenvolume-specimacrc material and spatial quantities
fdegg0 = Jfdeggt (28)
Correspondingly we can relate any vector- or tensor-valued surface degux fcurreng throughthe boundary of the material domain B0 to the corresponding contribution fsectgthrough the spatial boundary Bt
Z
B0
fcurreng cent dA =Z
Bt
fsectg cent da (29)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2551
rsquo
F J DtF
B0 Bt
raquo 0
R
R0
raquo t
r
Rt
Figure 2 Balance of mass densities deg uxes and sources
By making use of the classical Nanson formula from 1878 as da = JF iexclt cent dA weobtain the local counterpart of the above equation
fcurreng = Jfsectg cent F iexclt (210)
a relation between the material and the spatial surface deguxes which can alternativelybe expressed as Divfcurreng = J divfsectg Moreover we will make use of the diregerentialform of Reynoldsrsquos transport theorem
jDtfdegg0 = dtfdeggt + div(fdeggt laquo v) (211)
which follows from the above considerations It states that the material time rateof change of the volume-specimacrc quantity fdegg0 in a material domain B0 is equal tothe spatial time rate of change of the volume-specimacrc quantity fdeggt in the spatialdomain Bt plus the degux fdeggt laquo v through the surface Bt of the moving domainWhile Reynoldsrsquos transport theorem (211) will later on be applied to relate spatialand material quantities in the volume-specimacrc format the Euler theorem (24) willserve to relate the corresponding mass-specimacrc quantities
With the introduced demacrnitions at hand we will now elaborate the balance equa-tions for open systems For the sake of transparency we shall assume that suplusmncientsmoothness criteria are fulmacrlled by the related macrelds of the balanced quantity itselffdegg0 or fdeggt the related deguxes fcurreng and fsectg and the corresponding source termsfmacrg0 and fmacrgt Consequently instead of analysing the global or integral form of thebalance laws
Dt
Z
B0
fdegg0 dV =Z
B0
fcurreng cent dA +Z
B0
fmacrg0 dV
dt
Z
Bt
fdeggt dv +Z
Bt
[fdeggt laquo v] cent da =Z
Bt
fsectg cent da +Z
Bt
fmacrgt dv
9gtgtgt=
gtgtgt(212)
we will restrict ourselves to their local or rather diregerential format
Dtfdegg0 = Divfcurreng + fmacrg0
dtfdeggt + div(fdeggt laquo v) = divfsectg + fmacrgt
)
(213)
3 Balance of mass
In classical non-relativistic mechanics of closed systems the quantity of matter in abody B0 does not change irrespective of the motion the deformation and the accel-eration of the body However this conservation of mass is a mere demacrnition which is
Proc R Soc Lond A (2003)
2552 E Kuhl and P Steinmann
no longer valid for open systems like the ones considered here In abstract terms thelocal balance of mass of open systems states that the rate of change of the materialor spatial density raquo 0 or raquo t is equal to the sum of the divergence of the related massdegux R or r and the mass source R0 or Rt (see macrgure 2) Note that most existingtheories for open systems except for the one developed by Epstein amp Maugin (2000)a priori exclude the in- or outdegux of mass as R = 0 and r = 0 The leaching of port-landite or the progressive decalcimacrcation of the calcium silicate hydrates in concretefurnish typical examples of an outdegux of mass in chemomechanical applications Cellmigration is another example of a mass degux typically encountered in biomechanicalproblems In principle it always is possible to express any degux term R or r throughan equivalent source term of the form Div R or div r according to the `equivalence ofsurface and volume sourcesrsquo as stated by Truesdell amp Toupin (1960 x 157) Howeverwe shall allow for independent degux terms in the following to keep the underlyingtheory as general as possible Consequently the material version of the balance ofmass can be stated as
Dt raquo 0 = Div R + R0 (31)
The individual terms in the above equation can be pushed forward with the help ofthe standard Piola transforms
raquo 0 = J raquo t R0 = JRt R = Jr cent F iexclt (32)
Note that in classical continuum mechanics with R = 0 and R0 = 0 equa-tion (32)1 is usually referred to as the `material continuity equationrsquo The applicationof Reynoldsrsquos transport theorem (211)
jDt raquo 0 = dt raquo t + div( raquo tv) (33)
introduces the spatial version of the balance of mass
dt raquo t + div( raquo tv) = div r + Rt (34)
Equation (34) which was introduced as the `spatial continuity equationrsquo by Euler in1757 represents one of the basic equations in classical deguid mechanics in the contextof closed systems with r = 0 and Rt = 0 In the following we shall distinguishbetween the material and the spatial version of the balance of mass given in theform
Dt raquo 0 = Div R + R0 dt raquo t + div( raquo tv) = div r + Rt (35)
Remark 31 (volume- and mass-specimacrc formats) In the present theorythe balance of mass plays a central role since it can essentially be used to transformthe volume-specimacrc version of any other balance law to its mass-specimacrc counterpartIn the volume-specimacrc format the quantity to be balanced can either be given withmaterial or spatial reference as fdegg0 = raquo 0fdegg or fdeggt = raquo tfdegg It is balanced withthe sum of the divergence of the corresponding deguxes fcurreng and fsectg and the volumesources fmacrg0 and fmacrgt
Dtfdegg0 = Divfcurreng + fmacrg0 dtfdeggt + div(fdeggt laquo v) = divfsectg + fmacrgt (36)
The material and spatial versions of a balance law (36)1 and (36)2 respectivelyare related through the corresponding Piola transforms fdegg0 = Jfdeggt fmacrg0 = Jfmacrgt
and fcurreng = Jfsectg cent F iexclt in combination with Reynoldsrsquos transport theorem (211)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2553
rsquo
F J DtF
B0 Bt
p0
brvbar t
b0
pt
frac14 t
bt
Figure 3 Balance of momentum momentum densities deg uxes and sources
Note that the deguxes fcurreng and fsectg can be expressed in terms of the reduced deguxterms f sup1curreng and fsup1sectg in the form
fcurreng = fsup1curreng + fdegg laquo R fsectg = fsup1sectg + fdegg laquo r (37)
Correspondingly the volume-specimacrc source terms are demacrned in terms of the reducedsource terms fsup1g0 and fsup1gt
fmacrg0 = fsup1g0 + fdeggR0 iexcl rXfdegg cent R fmacrgt = fsup1gt + fdeggRt iexcl rxfdegg cent r (38)
Each balance law can thus be transformed into a mass-specimacrc version balancingthe rate of change of the mass-specimacrc quantity fdegg = fdegg0=raquo 0 or fdegg = fdeggt=raquo t withthe corresponding reduced degux f sup1curreng and fsup1sectg and the reduced source terms fsup1g0
and fsup1gt The mass-specimacrc balance equations can be derived by subtracting fdeggtimes the balance of mass (35) from the corresponding volume-specimacrc version (36)Consequently we obtain remarkably simple generic forms of the mass-specimacrc balancelaws
raquo 0 Dtfdegg = Divfsup1curreng + fsup1g0 raquo t dtfdegg + raquo tv cent rxfdegg = divfsup1sectg + fsup1gt (39)
which are related through the Piola transforms fdegg0 = Jfdeggt fsup1g0 = Jfsup1gt andf sup1curreng = Jfsup1sectg cent F iexclt and the Euler theorem (24) Note that the mass-specimacrc formatis free from all the explicit extra terms caused by the changes in mass Howeverthis is not the case in the formulation developed by Epstein amp Maugin (2000) wherethe gradient terms rXfdegg cent R and rxfdegg cent r are part of the mass-specimacrc balanceequation (39)
4 Balance of momentum
Bearing in mind the derivation of the generic balance laws of the preceding sectionwe now elaborate their specimacrcation to yield the balance of linear momentum It willturn out that the balance of angular momentum and the balance of kinetic energy canbe interpreted as particular weighted versions of the balance of linear momentum
(a) Volume-specimacrc version
The balance of momentum represents one of the `laws of classical mechanicsrsquo Forclosed systems it was macrrst specimacred by Euler in 1776 It states that in an inertialframe the reaction of any body is equal to the load acting upon it Therein thereaction is characterized through the volume-specimacrc momentum density p0 or pt
Proc R Soc Lond A (2003)
2554 E Kuhl and P Steinmann
canonically demacrned as a spatial covector given through the partial derivative of thevolume-specimacrc kinetic-energy density K0 or Kt
K0 = 12raquo 0v cent v Kt = 1
2raquo tv cent v (41)
with respect to the spatial velocity v
p0 = v K0 = raquo 0v pt = v Kt = raquo tv (42)
The load can essentially be divided into two types namely the contact or surfaceforces represented by the momentum deguxes brvbar t and frac14 t and the at-a-distance forcesie the momentum sources b0 and bt (see macrgure 3) Consequently the material versionof the volume-specimacrc balance of momentum sometimes also referred to as `Cauchyrsquosmacrrst law of motionrsquo can be expressed as
Dtp0 = Div brvbar t + b0 (43)
In honour of the work of Piola in 1833 and Kirchhoreg in 1852 the momentum degux brvbar t
is typically referred to as the macrrst PiolaKirchhoreg stress tensor in classical continuummechanics With the help of the well-known Piola transforms
p0 = Jpt b0 = Jbt brvbar t = J frac14 t cent F iexclt (44)
the individual terms of equation (43) can be pushed forward to the spatial conmacrgu-ration The corresponding momentum degux frac14 t is commonly denoted as the Cauchystress tensor in standard continuum mechanics commemorating the early work ofCauchy in 1823 The application of Reynoldsrsquos transport theorem (211)
jDtp0 = dtpt + div(pt laquo v) (45)
yields the spatial version of the balance of momentum
dtpt + div(pt laquo v) = div frac14 t + bt (46)
which is typically applied in classical deguid mechanics The overall degux term frac14 t iexclpt laquo v redegects the convective nature of the above equation through the transport oflinear momentum pt laquo v In summary we distinguish between the material and thespatial version of the volume-specimacrc balance of momentum
Dtp0 = Div brvbar t + b0 dtpt + div(pt laquo v) = div frac14 t + bt (47)
On the Neumann boundary characterized through the material and spatial normalN and n the normal projections of the momentum deguxes of PiolaKirchhoreg andCauchy type brvbar t and frac14 t are required to be in equilibrium with the correspondingclosed- and open-system stress-vector contributions tclos ed
0 or tclos edt and top en
0 ortop en
t respectively
brvbar t cent N = tclos ed0 + t op en
0 top en0 = sup1t op en
0 + [p laquo R] cent N
frac14 t cent n = tclos edt + t op en
t top ent = sup1t op en
t + [p laquo r] cent n
)
(48)
Correspondingly the momentum sources terms b0 and bt can be understood as thesum of the closed- and the open-system volumeforce contributions bclos ed
0 or bclos edt
and bop en0 or bop en
t
b0 = bclos ed0 + bop en
0 bop en0 = sup1bop en
0 + pR0 iexcl rXp cent R
bt = bclos edt + bop en
t bop ent = sup1bop en
t + pRt iexcl rxp cent r
)
(49)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2555
While the expressions in terms of R r R0 and Rt take into account the part ofthe newly created or indegowing mass that carries the same amount of mass-specimacrcmomentum p as the original substrate the additional terms sup1t op en
0 sup1t op ent sup1b op en
0 andsup1b op en
t account for a possible diregerence in the momentum density
Remark 41 (balance of angular momentum) The volume-specimacrc angular-momentum density l0 or lt is demacrned through the vector product of the correspondinglinear momentum density p0 or pt with a distance vector a = rsquo iexcl rsquo0 from a macrxedpoint rsquo0 in space
l0 = a pound p0 lt = a pound pt (410)
In the absence of distributed couples and internal rotational degrees of freedom thevolume-specimacrc balance of angular momentum for open systems can be derived bytaking the vector product of the volume-specimacrc momentum balance (47) with thedistance vector a
a pound Dtp0 = a pound Div brvbar t + a pound b0 (411)
With the demacrnition of the angular momentum (410) the above equation can berewritten as
Dtl0 = Div(a pound brvbar t) + a pound b0 iexcl F pound brvbar t (412)
Thereby the vector product of the two second-order tensors iexcl F pound brvbar t can beexpressed in terms of the axial vector of the related second-order tensor [F cent brvbar ]axlas iexcl F pound brvbar t = 2[F cent brvbar ]axl It proves convenient for later purposes to reformulate theabove statement in terms of the reduced momentum degux sup1brvbar t = brvbar t iexcl p laquo R andthe reduced momentum source sup1b0 = b0 iexcl pR0 + rXp cent R
Dtl0 = Div(a pound [ sup1brvbar t +p laquoR])+a pound [sup1b0 +pR0 iexcl rXp cent R] iexcl F pound [ sup1brvbar t +plaquoR] (413)
Herein the third term on the right-hand side
iexcl F pound [ sup1brvbar t + p laquo R] = 2[F cent [ sup1brvbar + R laquo p]]axl
represents the volume-specimacrc production of the angular momentum l0 Anticipatinglater considerations we would like to point out that assuming the symmetry of thereduced momentum degux F cent sup1brvbar = sup1brvbar t cent F t or equivalently sup1frac14 = sup1frac14 t the production ofangular momentum reduces to 2[F cent [R laquo p]]axl or 2[r laquo p]axl respectively
Remark 42 (balance of kinetic energy) Although the balance of kineticenergy does not constitute an independent balance law it proves signimacrcant to takea closer look at it since it will help to introduce work conjugate stress and strainmeasures Moreover the balance of kinetic energy will be used to identify the externaland internal mechanical power which are essential for our further thermodynamicalconsiderations The starting point is the material time derivative of the volume-specimacrc kinetic-energy density K0 = 1
2raquo 0v cent v
DtK0 = raquo 0 DtK + K Dt raquo 0 = p0 cent Dtv + K Dt raquo 0 = v cent Dtp0 iexcl K Dt raquo 0 (414)
With the projection of the volume-specimacrc balance of momentum (43) with the spa-tial velocity v and the balance of mass (35)1 weighted by the mass-specimacrc kinetic-energy density K
v cent Dtp0 = Div(v cent brvbar t) + v cent b0 iexcl rXv brvbar t
KDt raquo 0 = Div(KR) + KR0 iexcl rXK cent R
)
(415)
Proc R Soc Lond A (2003)
2556 E Kuhl and P Steinmann
equation (414) can be rewritten in the explicit form
DtK0 = Div(v cent brvbar t iexcl KR) + v cent b0 iexcl KR0 + rXK cent R iexcl brvbar t DtF (416)
In what follows it will prove convenient to reformulate the above equation in terms ofthe reduced momentum degux sup1brvbar t = brvbar t iexcl p laquo R and the reduced momentum sourcesup1b0 = b0 iexcl pR0 + rXp cent R which can be related to their overall counterparts brvbar t andb0 through the following identities
Div(v cent brvbar t) = Div(v cent sup1brvbar t) + Div(2KR)
v cent b0 = v cent sup1b0 + 2KR0 iexcl v cent rXp cent R
brvbar t DtF = sup1brvbar t DtF + p cent rXv cent R
9gtgt=
gtgt(417)
With the help of the above equations and the identity v cent rX p + p cent rXv = 2rXKfollowing from v cent p = 2K equation (416) can be reformulated in the following way
DtK0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R iexcl sup1brvbar t DtF (418)
As stated by Stokes in 1857 the rate of change of the kinetic energy is equal to theexternal mechanical power minus the internal mechanical power Consequently theright-hand side of the above equation enables the identimacrcation of the volume-specimacrcexternal and internal mechanical power pext
0 and pin t0
pext0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R
pin t0 = sup1brvbar t DtF
)(419)
whereby pext0 characterizes the total rate of working of mechanical actions on the
body This rate of working consists of the degux contribution v cent sup1brvbar t + KR and thesource term v cent sup1b0 + KR0 iexcl rXK cent R The internal mechanical power pin t
0 consistsexclusively of the production term for the kinetic energy as sup1brvbar t DtF The demacrnitionof the latter suggests the interpretation of the reduced momentum degux sup1brvbar t and thematerial time derivative of the deformation gradient DtF as work conjugate pairsWith the above abbreviations at hand the balance of kinetic energy can be rewrittenin a form which has been denoted as the local form the `theorem of energyrsquo by Maugin(1993)
DtK0 = pext0 iexcl pin t
0 dtKt + div(Ktv) = pextt iexcl pin t
t (420)
The spatial version of the balance of kinetic energy (420)2 follows naturally byapplying the appropriate Piola transforms K0 = JKt
pext0 = Jpext
t and pin t0 = Jpin t
t along with Reynoldsrsquos transport theorem (211)
(b) Mass-specimacrc version
The mass-specimacrc version of the balance of momentum is based on the mass-specimacrckinetic-energy density
K = 12v cent v (421)
demacrning the quantity to be balanced as its partial derivative with respect to thespatial velocity v
p = v K = v (422)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2557
The rate of change of the mass-specimacrc momentum density p ie the covariant spatialvelocity is balanced with the reduced momentum deguxes sup1brvbar t or sup1frac14 t and the reducedmomentum sources sup1b0 or sup1bt By subtracting the balance of mass (35) weighted bythe momentum density p from the volume-specimacrc momentum balance (47) we canderive the diregerent versions of the mass-specimacrc momentum balance
raquo 0Dtp = Div sup1brvbar t + sup1b0 raquo t dtp + raquo tv cent rxp = div sup1frac14 t + sup1bt (423)
The reduced momentum deguxes sup1brvbar t and sup1frac14 t which are related to the overall momen-tum deguxes brvbar t and frac14 t through sup1brvbar t = brvbar t iexcl p laquo R and sup1frac14 t = frac14 t iexcl p laquo r are deter-mined by the closed- and open-system stress-vector contributions tclos ed
0 and sup1t op en0
or tclos edt and sup1t op en
t respectively on the Neumann boundary
sup1brvbar t cent N = tclos ed0 + sup1t op en
0
sup1frac14 t cent n = tclos edt + sup1t op en
t
)(424)
while the reduced momentum sources sup1b0 and sup1bt are given as the sum of the classicalclosed-system volume force contributions bclos ed
0 or bclos edt and the reduced open-
system contributions sup1b op en0 or sup1b op en
t
sup1b0 = bclos ed0 + sup1bop en
0
sup1bt = bclos edt + sup1bop en
t
)(425)
Note that the mass-specimacrc momentum balance (423) is free from all the explicitextra terms caused by the changes in mass The indeguence of the open system mani-fests itself only implicitly through the prescribed boundary terms sup1t op en
0 and sup1t op ent and
the prescribed volume sources sup1b op en0 and sup1b op en
t The convective indeguence introducedthrough the raquo tv cent rxp term however is also present in the closed-system case
Remark 43 (balance of angular momentum) The mass-specimacrc angular-momentum density l is given as the vector product of the mass-specimacrc momentumdensity p with the distance vector a = rsquo iexcl rsquo0
l = a pound p (426)
Consequently the mass-specimacrc version of the balance of angular momentum followsfrom the vector product of the mass-specimacrc momentum balance (423) with thedistance vector a
a pound raquo 0Dtp = a pound Div sup1brvbar t + a pound sup1b0 (427)
By making use of the demacrnition (426) the above equation can be rewritten as
raquo 0Dtl = Div(a pound sup1brvbar t) + a pound sup1b0 iexcl F pound sup1brvbar t (428)
Again the third term on the right-hand side iexcl F pound sup1brvbar t = 2[F cent sup1brvbar ]axl representsthe production of the mass-specimacrc angular momentum l If we require the balanceof angular momentum to represent an individual independent statement
raquo 0Dtl = Div(a pound sup1brvbar t) + a pound sup1b0 (429)
this production term has to vanish identically This condition thus reveals the sym-metry requirements
F cent sup1brvbar = sup1brvbar t cent F t sup1frac14 = sup1frac14 t (430)
Proc R Soc Lond A (2003)
2558 E Kuhl and P Steinmann
The material and the spatial versions (430)1 and (430)2 respectively are relatedthrough the corresponding Piola transform sup1brvbar t = J sup1frac14 t cent F iexclt A comparison of thevolume-specimacrc statement (413) with its mass-specimacrc counterpart (429) indicatesthat the in- or outdegux of mass R or r produces an additional amount of angularmomentum unless
F cent R laquo p = p laquo R cent F t r laquo p = p laquo r (431)
ie the mass degux F centR or r is constitutively demacrned to be coaxial to the mass-specimacrcmomentum density p
Remark 44 (balance of kinetic energy) To investigate the mass-specimacrc ver-sion of the balance of kinetic energy we need to evaluate the material time derivativeof the mass-specimacrc kinetic-energy density K = 1
2v centv which can easily be derived by
subtracting the weighted balance of mass (415)2 from the material time derivativeof the volume-specimacrc kinetic-energy density K0 given in equation (418) as
raquo 0 DtK = DtK0 iexcl K Dt raquo 0 (432)
and thusraquo 0 DtK = Div(v cent sup1brvbar t) + v cent sup1bext
0 iexcl sup1brvbar t DtF (433)
Consequently we can identify the mass-specimacrc external and internal mechanicalpower sup1pext
0 and sup1pin t0 respectively
sup1pext0 = pext
0 iexcl KDt raquo 0 = Div(v cent sup1brvbar t) + v cent sup1b0
sup1pin t0 = pin t
0 = sup1brvbar t DtF
)(434)
It is worth noting that the diregerence of the mass- and volume-specimacrc formu-lation manifests itself only in the demacrnition of the external mechanical powersup1pext
0 = pext0 iexcl KDt raquo 0 while the mass-specimacrc internal power is identical to its volume-
specimacrc counterpart as sup1pin t0 = pin t
0 Consequently the material and the spatial versionof the mass-specimacrc balance of kinetic energy take the formats
raquo 0 DtK = sup1pext0 iexcl sup1pin t
0 raquo t dtK + raquo tv cent rxK = sup1pextt iexcl sup1pin t
t (435)
whereby both formulations are related through the corresponding Piola transformswith sup1pext
0 = J sup1pextt and sup1pin t
0 = Jsup1pin tt and the Euler theorem (24)
5 Balance of energy
The balance of total energy as a representation of the macrrst law of thermodynamicsbalances the rate of change of the volume-specimacrc total energy density E0 or Et asthe sum of the kinetic and internal energy density E0 = K0 + I0 or Et = Kt + It
with the external power In classical continuum mechanics of closed systems thisexternal power is composed of a purely mechanical contribution pext
0 or pextt and a
non-mechanical thermal contribution qext0 or qext
t Therefore the balance of energy issometimes referred to as the `principle of interconvertibility of heat and mechanicalworkrsquo a notion which was known to Carnot in 1832 and experimentally verimacredby Joule in 1843 However when dealing with open systems we have to generalizethe demacrnition of the non-mechanical external power by including additional externalopen-system contributions in the demacrnition of qext
0 and qextt (cf Malvern 1969 x 54)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2559
rsquo
F J DtF
B0 Bt
E0
v cent brvbar t Q
v cent b0 Q0
Et
v cent frac14 t q
v cent bt Qt
Figure 4 Balance of energy energy densities deg uxes and sources
(a) Volume-specimacrc version
For the spatial-motion problem the rate of change of the volume-specimacrc totalenergy density E0 = raquo 0E can be expressed in the form (cf macrgure 4)
DtE0 = Div(v cent sup1brvbar t iexcl sup1Q + ER) + v cent sup1b0 + sup1Q0 + ER0 iexcl rXE cent R (51)
Thereby in addition to the purely mechanical external power pext0 demacrned in equa-
tion (419) we have included the non-mechanical external power qext0 accounting
for the classical thermal eregects of the closed system and the additional open-systemeregects as an additional non-mechanical supply of energy
qext0 = Div( iexcl Q) + Q0 (52)
Similar to the mechanical power the non-mechanical power consists of a degux and asource contribution denoted by Q and Q0 respectively The former is composed ofthe reduced outward non-mechanical energy degux sup1Q modimacred by the explicit extradegux due to the open system IR while the latter is the sum of the reduced non-mechanical energy source sup1Q0 enhanced by the explicit eregects of the open systemIR0 and rXI cent R
pext0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R
qext0 = Div( iexcl sup1Q + IR) + sup1Q0 + IR0 iexcl rXI cent R
)
(53)
Equation (51) can thus be reformulated in the concise form
DtE0 = pext0 + qext
0 dtEt + div(Etv) = pextt + qext
t (54)
which for the classical closed-system case dates back to the early works of Duhem in1892 Again the spatial version (54)2 follows from the appropriate Piola transformsE0 = JEt
pext0 = Jpext
t qext0 = Jqext
t Q = Jq cent F iexclt and sup1Q = J sup1q cent F iexclt along withReynoldsrsquos transport theorem (211) The demacrnition of the non-mechanical energydeguxes Q and q parallels the introduction of the macrrst PiolaKirchhoreg stress tensorbrvbar and the Cauchy stress frac14 On the Neumann boundary the non-mechanical energydeguxes Q and q are given in terms of the normal projection of the classical heat deguxdensities qclos ed
0 and qclos edt and the additional open-system contributions qop en
0 andqop en
t Q cent N = qclos ed
0 + qop en0 qop en
0 = sup1q op en0 iexcl IR cent N
q cent n = qclos edt + qop en
t qop ent = sup1q op en
t iexcl Ir cent n
)(55)
Proc R Soc Lond A (2003)
2560 E Kuhl and P Steinmann
Moreover the non-mechanical energy sources Q0 and Qt can be understood as thesum of the classical heat source Qclos ed
0 and Qclos edt and an additional non-mechanical
energy source taking into account the nature of the open system Qop en0 and Qop en
t
Q0 = Qclos ed0 + Qop en
0 Qop en0 = sup1Qop en
0 + IR0 iexcl rXI cent R
Qt = Qclos edt + Qop en
t Qop ent = sup1Qop en
t + IRt iexcl rxI cent r
)(56)
In formal analogy to the demacrnition of the momentum quantities the expressions interms of R r R0 and Rt take into account the part of the newly added mass thatcarries the same amount of non-mechanical energy as the original substrate while theadditional open-system terms sup1q op en
0 sup1q op ent sup1Qop en
0 and sup1Qop ent account for a possible
diregerence in non-mechanical energy
Remark 51 (balance of internal energy) For further thermodynamical con-siderations it proves convenient to consider the volume-specimacrc internal energy den-sity I0 = E0 iexcl K0 or It = Et iexcl Kt given as the diregerence of the corresponding totalenergy density and the kinetic-energy density Consequently the two versions of thebalance of internal energy follow from subtracting the balance of kinetic energy (420)from the total energy balance (54)
DtI0 = pin t0 + qext
0 dtIt + div(Itv) = pin tt + qext
t (57)
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the equations derived above balances the mass-specimacrc energy density E = E0=raquo 0 with the mass-specimacrc external mechanical powersup1pext
0 introduced in (434) and the mass-specimacrc non-mechanical power sup1qext0 as
sup1qext0 = qext
0 iexcl IDt raquo 0 = iexcl Div sup1Q + sup1Q0 (58)
The corresponding balance equations
raquo 0 DtE = sup1pext0 + sup1qext
0 raquo t dtE + raquo tv cent rxE = sup1pextt + sup1qext
t (59)
follow from subtracting the corresponding balance of mass (35) weighted by the totalenergy E from the volume-specimacrc energy balance (54) The spatial version (59)2can be derived by applying the corresponding Piola transforms with sup1pext
0 = Jsup1pextt and
sup1qext0 = J sup1qext
t and the Euler theorem (24) Again we can relate the reduced energydeguxes sup1Q and sup1q demacrned through sup1Q = Q iexcl IR and sup1q = q iexcl Ir to the classical heatdegux qclos ed
0 or qclos edt and the energy degux caused by additional eregects of the open
system sup1q op en0 and sup1q op en
t
sup1Q cent N = qclos ed0 + sup1q op en
0
sup1q cent n = qclos edt + sup1q op en
t
)(510)
Moreover the reduced non-mechanical energy sources sup1Q0 and sup1Qt are given as the sumof the classical heat source of a closed system Qclos ed
0 and Qclos edt and the additional
open-system contribution to the energy sup1Qop en0 and sup1Qop en
t
sup1Q0 = Qclos ed0 + sup1Qop en
0
sup1Qt = Qclos edt + sup1Qop en
t
)(511)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2561
Again as opposed to the formulation developed by Epstein amp Maugin (2000) themass-specimacrc format is free from all the explicit extra terms caused by changes inmass and thus resembles the balance of energy known from classical mechanics
Remark 52 (balance of internal energy) A reduction to the balance ofinternal energy I = E iexcl K follows from subtracting the balance of kinetic energy(435) from the balance of total energy (59)
raquo 0 DtI = sup1pin t0 + sup1qext
0 raquo t dtI + raquo tv cent rxI = sup1pin tt + sup1qext
t (512)
6 Balance of entropy
The macrrst law of thermodynamics in the form of the balance of energy expressesthe interconvertibility of heat and work However the balance of energy itself doesnot place any restrictions on the direction of the thermodynamical process Thesecond law of thermodynamics the balance of entropy postulates the existence ofan absolute temperature and of a specimacrc entropy as a state function Through theinternal production of the latter which is required to either vanish for reversibleprocesses or be strictly positive for irreversible processes a direction is imposedon the thermodynamical process Recall that when dealing with open systems amacrxed material volume B0 is allowed to constantly gain or lose mass Open systemsnaturally exhibit an additional entropy degux and entropy source caused by the addedmass as pointed out earlier in the famous monograph by Schrodinger (1944 x 6) aswell as by Malvern (1969 x 56) or also recently by Epstein amp Maugin (2000) Theindeguence of changes in mass on the entropy is twofold On the one hand it is redegectedthrough the explicit open-system entropy degux SR and the related source terms SR0
and iexcl rXS cent R On the other hand we will introduce the reduced entropy degux andsource sup1H and sup1H0 respectively which in turn split into the extra non-mechanicalenergy terms sup1Q and sup1Q0 divided by the absolute temperature sup3 and an extra entropydegux and source S and S0 While the former parallel the introduction of the entropydegux and source in classical closed-system thermodynamics the contributions S andS0 account for the diregerence in entropy of the added mass and the original substrate
Remark 61 (balance of entropy versus entropy inequality) In the relatedliterature the entropy is often introduced through the entropy inequality For thesake of analogy we will treat the entropy as a balance quantity in the followingIts evolution is thus balanced with the sum of the external and internal entropyproduction whereby the latter is constrained to be non-negative throughout In thecase of closed-system thermodynamics this approach has been followed for exampleby Truesdell amp Toupin (1960 xx 256 and 257) Haupt (2000 x 33) or Liu (2002 x 5)
(a) Volume-specimacrc version
The balance of entropy balances the volume-specimacrc entropy density S0 = raquo 0S withthe external entropy input hext
0 and the internal entropy production hin t0 Thereby
the former consists of the entropy degux H across the material surface B0 and theentropy source H0 in the material domain B0 (cf macrgure 5)
hext0 = Div( iexcl H ) + H0 (61)
Proc R Soc Lond A (2003)
2562 E Kuhl and P Steinmann
rsquo
F J DtF
B0 Bt
S0
H S
H0 S0
St
h s
Ht St
Figure 5 Balance of entropy entropy densities deg uxes and sources
The external entropy degux H is introduced as the sum of the reduced external entropydegux sup1H enhanced by the explicit open-system contribution SR Accordingly theexternal entropy source H0 consists of the reduced entropy source sup1H0 modimacred byadditional terms SR0 and iexcl rXS cent R accounting for the explicit open-system con-tribution to the entropy supply
hext0 = Div( iexcl sup1H + SR) + sup1H0 + SR0 iexcl rXS cent R
hin t0 gt 0
)(62)
Just like in classical thermodynamics of closed systems the internal entropy produc-tion hin t
0 is required to be point-wise non-negative The balance of entropy can thusbe expressed in the following form
DtS0 = hext0 + hin t
0 dtSt + div(Stv) = hextt + hin t
t (63)
Again the material and the spatial version are related through the correspond-ing Piola transforms S0 = JSt
hext0 = Jhext
t hin t0 = Jhin t
t H = Jh cent F iexclt andsup1H = J sup1h cent F iexclt in combination with Reynoldsrsquos transport theorem Note that alter-
natively the balance of entropy which is primarily nothing but a formal demacrnitionof the entropy production can be recast into the inequality DtS0 iexcl hext
0 gt 0 Thiscondition which is typically referred to as `postulate of irreversibilityrsquo in classicalthermodynamics (see Truesdell amp Toupin 1960 x 258) induces a direction to thethermodynamic process Next we will introduce Neumann boundary conditions forthe spatial-motion Kirchhoreg and Cauchy type entropy degux H and h in terms of theclassical closed-system entropy degux contribution hclos ed
0 or hclos edt and the additional
open-system contribution hop en0 or hop en
t
H cent N = hclos ed0 + hop en
0 hop en0 = sup1hop en
0 iexcl SR cent N
h cent n = hclos edt + hop en
t hop ent = sup1hop en
t iexcl Sr cent n
)
(64)
Accordingly the entropy sources H0 and Ht are introduced as the sum of the classicalentropy source of the closed system Hclos ed
0 or Hclos edt and the additional entropy
source accounting for the nature of the open system Hop en0 or Hop en
t
H0 = Hclos ed0 + Hop en
0 Hop en0 = sup1Hop en
0 + SR0 iexcl rXS cent R
Ht = Hclos edt + Hop en
t Hop ent = sup1Hop en
t + SRt iexcl rxS cent r
)
(65)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2563
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the above equations states that the rate of changeof the mass-specimacrc entropy S = S0=raquo 0 is in equilibrium with the mass-specimacrcexternal entropy input sup1hext
0 and the mass-specimacrc internal entropy production sup1hin t0
which are introduced in the following way
sup1hext0 = hext
0 iexcl SDt raquo 0 = iexcl Div sup1H + sup1H0
sup1hin t0 = hin t
0 gt 0
)
(66)
The resulting material and spatial version of the balance of entropy
raquo 0 DtS = sup1hext0 + sup1hin t
0 raquo t dtS + raquo tv cent rxS = sup1hextt + sup1hin t
t (67)
which can be derived by subtracting S times the balance of mass (35) from thevolume-specimacrc balance of entropy (63) are related via the appropriate Piola trans-forms sup1hext
0 = Jsup1hextt and sup1hin t
0 = Jsup1hin tt and the Euler theorem (24) Moreover we can
relate the reduced entropy deguxes sup1H and sup1h demacrned through sup1H = H iexcl SR andsup1h = h iexcl Sr to the classical entropy degux of the closed system hclos ed
0 or hclos edt and
the entropy degux caused by additional eregects of the open system sup1hop en0 or sup1hop en
t
sup1H cent N = hclos ed0 + sup1hop en
0
sup1h cent n = hclos edt + sup1hop en
t
)(68)
Accordingly the reduced entropy sources sup1H0 = H0 iexcl SR0 + rXS cent R and sup1Ht = Ht iexclSRt + rxS cent r are given as the sum of the classical closed-system entropy sourceHclos ed
0 or Hclos edt and the additional open-system contribution to the entropy source
sup1Hop en0 or sup1Hop en
t sup1H0 = Hclos ed
0 + sup1Hop en0
sup1Ht = Hclos edt + sup1Hop en
t
)
(69)
Remark 62 (dissipation inequality) For further elaboration it proves con-venient to set up relations between the reduced entropy degux sup1H and the reducednon-mechanical energy degux sup1Q and between the reduced entropy source sup1H0 and thereduced non-mechanical energy source sup1Q0 in terms of the absolute temperature sup3 an extra entropy degux S and an extra entropy source S0
sup1H =1sup3
sup1Q + S sup1H0 =1sup3
sup1Q0 + S0 (610)
The above equations can be understood as a generalization of the ideas of Cowinamp Hegedus (1976) who have suggested including the additional entropy source S0
accounting for changes in entropy caused by changes in mass that are not consideredimplicitly through the changes in energy sup1Q0 Both the additional entropy degux S andthe entropy source S0 which we shall summarize in the term s
0 = iexcl Div S + S0 inthe following have to be determined constitutively These additional terms can beunderstood as an explicit representation of the exchange of entropy with the `outsideworldrsquo We now turn to the evaluation of the above-stated second law of thermo-dynamics by recasting it into an appropriate form of the dissipation inequality astatement that places further restrictions on the form of the constitutive response
Proc R Soc Lond A (2003)
2564 E Kuhl and P Steinmann
functions For this purpose we shall interpret the internal entropy production sup1hin t0 as
a measure for the degree of irreversibility introducing the dissipation rate sup1d0 as the
internal entropy production weighted by the absolute temperature as sup1d0 = sup3 sup1hin t
0 gt 0With the help of the balance of entropy (67)1 the relations (610) and the bal-ance of internal energy (512)1 the dissipation rate can be reformulated to yield theClausiusDuhem inequality in an internal energy based fashion
sup1d0 = sup1pin t
0 iexcl raquo 0Dt[I iexcl sup3 S ] iexcl raquo 0S Dt sup3 iexcl s0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (611)
By making use of the appropriate LegendreFenchel transform introducing theHelmholtz free energy ordf = I iexcl sup3 S we end up with the classical free-energy-basedversion of the ClausiusDuhem inequality
sup1d0 = sup1brvbar t DtF iexcl raquo 0 Dt ordf iexcl raquo 0S Dt sup3 iexcl s
0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (612)
which is particularly useful when the temperature sup3 rather than the entropy S isused as the independent variable In classical thermodynamics the ClausiusDuheminequality (612) is typically decomposed into a local and a conductive contributionsup1d loc
0 and sup1dcon0
sup1d loc0 = sup1brvbar t DtF iexcl raquo 0Dt ordf iexcl raquo 0SDt sup3 iexcl s
0 sup3 gt 0 sup1d con0 = iexcl sup1Q cent rX ln sup3 gt 0 (613)
whereby the local term sup1d loc0 gt 0 represents the ClausiusPlanck inequality for open
systems while the remaining conductive term sup1dcon0 gt 0 is typically referred to as a
Fourier inequality As a suplusmncient condition for sup1d0 gt 0 both inequalities are required
to hold separately In what follows we shall apply the dissipation inequality (613) toderive constitutive equations for the reduced momentum degux sup1brvbar t and the entropy SIn addition the evaluation of the dissipation inequality places further restrictions onthe extra entropy exchange s
0 The underlying procedure will be highlighted in detailfor the simple model problem of thermo-hyperelasticity in the following section
Remark 63 Note that at this stage the introduction of the reduced entropydegux and source sup1H = sup1Q=sup3 + S and sup1H0 = sup1Q0=sup3 + S0 as introduced in equations(610) is a mere constitutive assumption Nevertheless for particular constitutive-model problems the postulated relations can be verimacred through the evaluation ofthe dissipation inequality according to Muller (1973) and Liu (1972) (see also Liu2002) It will turn out that in most cases equations (610) are justimacred with thetrivial solution S = 0 and S0 = 0 However assuming this result from the veryoutset might be too restrictive for complex constitutive models as also pointed outby Epstein amp Maugin (2000)
7 Thermo-hyperelasticity
We are now in a position to exploit the second law of thermodynamics in the formof the ClausiusDuhem inequality along the lines of Coleman amp Noll (1963) Thestraightforward evaluation of the local part of the dissipation inequality in the formof the ClausiusPlanck inequality (613)1 will result in the demacrnition of the reducedmomentum degux sup1brvbar and the mass-specimacrc entropy density S Its conductive sup-plement (613)2 the Fourier inequality suggests the demacrnition of the reduced non-mechanical energy degux sup1Q along the lines of the classical linear heat conduction intro-duced by Fourier in 1822 Finally the mass degux R will be introduced constitutively
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2565
in the context of classical linear mass diregusion according to Fickrsquos law Here wewill thus restrict ourselves to a thermo-hyperelastic-model problem for which all thedissipation is caused exclusively by heat conduction and possibly by an additionalopen-system contribution of the `outside worldrsquo In what follows we shall make useof the multiplicative decomposition of the free energy ordf 0
ordf 0 = raquo 0 ordf (71)
Thereby the mass-specimacrc free-energy density ordf is expressed in terms of the materialdensity raquo 0 the deformation gradient F and the absolute temperature sup3 with a pos-sible explicit dependence on the material placement X Within the thermodynamicsof open systems the material density raquo 0 is allowed to vary in space and time is thusintroduced as function of the material placement X and the time t
ordf = ordf ( raquo 0 F sup3 X) raquo 0 = raquo 0(X t) (72)
Consequently the material time derivative of the free-energy density is formally givenin the form
Dt ordf = D raquo 0ordf Dt raquo 0 + DF ordf DtF + D sup3 ordf Dt sup3 (73)
The evaluation of the ClausiusPlanck inequality (613)1
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 + [ sup1brvbar t iexcl raquo 0DF ordf ] DtF iexcl [ raquo 0S + raquo 0 D sup3 ordf ] Dt sup3 iexcl s0 sup3 gt 0 (74)
demacrnes the reduced macrrst PiolaKirchhoreg stress tensor sup1brvbar t and the mass-specimacrcentropy S as thermodynamically conjugate variables to the deformation gradientF and the absolute temperature sup3
sup1brvbar t = raquo 0 DF ordf S = iexcl D sup3 ordf (75)
As in Cowin amp Hegedus (1976) we are left with a reduced inequality of the form
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 iexcl s0 sup3 gt 0 (76)
In biomechanics the simplest choice for the free-energy function ordf for cellular mate-rials such as open-pored biological tissues is based on the classical isotropic Neo-Hookean-type free-energy function weighted by the actual relative density [ raquo 0=raquo curren
0]n
(see for example Carter amp Hayes 1977 Gibson amp Ashby 1997)
ordf =middot
raquo 0
raquo curren0
cedil[niexcl1] 1raquo curren
0
[12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]] (77)
Here para and middot denote the classical Lamparae constants and n is an additional exponentusually allowed to vary between 1 6 n 6 35 A selection of more advanced free-energy functions for orthotropic biological tissues can be found for example in therecent collection of publications by Cowin amp Humphrey (2001) The derivatives of thefree energy ordf with respect to the material density raquo 0 and the deformation gradientF take the format
D raquo 0ordf = [n iexcl 1]
middotraquo 0
raquo curren0
cedil[niexcl2]middot 1raquo curren
0
cedil2
[ 12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]]
DF ordf =middot
raquo 0
raquo curren0
cedil[niexcl1]middot 1raquo curren
0
cedil[ middot F + [ para ln J iexcl middot ]F iexclt]
9gtgtgtgt=
gtgtgtgt
(78)
Proc R Soc Lond A (2003)
2566 E Kuhl and P Steinmann
whereby the macrrst derivative can alternatively be expressed as D raquo 0ordf = [n iexcl 1] ordf =raquo 0
According to equation (75) the reduced macrrst PiolaKirchhoreg stress tensor
sup1brvbar t =middot
raquo 0
raquo curren0
cediln
[ middot F + [ para ln J iexcl middot ]F iexclt] (79)
can be understood as the classical Neo-Hookean stress tensor weighted by the actualrelative density [ raquo 0=raquo curren
0]n The reduced dissipation inequality
iexcl [n iexcl 1] ordf [Div R + R0] + sup3 [Div S iexcl S0] gt 0 (710)
places implicit restrictions on the dissipation generated by the density evolution Dt raquo 0
through the mass degux R and the mass source R0 This amount of dissipation hasat least to be compensated by an appropriate constitutive assumption for the extraexternal entropy input s
0 through the extra entropy degux S and the extra entropysource S0 eg
S = [n iexcl 1] ordf1sup3
R S0 = iexcl [n iexcl 1] ordf1sup3
R0 (711)
Similar to the context of chemomechanics the degux r or R is usually related to thespatial or material gradient of the density rx raquo 0 or rX raquo 0 as
r = R0b cent rx raquo 0 R = rtB cent rX raquo 0 (712)
in analogy to Fickrsquos law for concentrations Here R0 and rt denote the mass-conduction coeplusmncient introducing either a materially or a spatially isotropicresponse In the context of biomechanics we typically macrnd variations of the con-stitutive equation
R0 =middot
raquo 0
raquo curren0
cediliexclm
ordf 0 iexcl ordf curren0 (713)
for the mass source R0 where raquo curren0 and ordf curren
0 denote the reference density and the refer-ence free energy respectively while m is an additional exponent that is commonlychosen to m gt n (see Harrigan amp Hamilton 1993) Finally the evaluation of theFourier inequality (613)2 as sup1d con
0 = iexcl sup1Q cent rX ln sup3 gt 0 suggests the demacrnition of themass-specimacrc non-mechanical energy degux sup1q or sup1Q according to Fourierrsquos law as
sup1q = iexcl K0b cent rx sup3 sup1Q = iexcl ktB cent rX sup3 (714)
with K0 and kt denoting the materially or spatially isotropic conductivity In order toa priori guarantee the satisfaction of the Fourier inequality (613)2 the conductivityis required to be non-negative K0 gt 0 and kt gt 0
8 Conclusion
We have presented a general framework for the thermodynamics of open systemsThe derived macreld equations are believed to be particularly useful in biomechanicalor chemomechanical applications where attention is conmacrned to one individual sub-system of the overall matter present Due to the fact that this open subsystem isallowed to constantly gain or lose mass the balance of mass had to be enhancedby additional surface and volume terms redegecting the interaction with the `outsideworldrsquo Since the newly created mass carries a particular amount of momentum
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2567
energy and entropy all the other balance equations had to be reformulated as wellTo clarify the indeguence of the changes in mass we have introduced the notions of`volume-specimacrcrsquo and `mass-specimacrcrsquo formats The former accounts for the total indegu-ence of the changes in mass through explicit mass-dependent and additional implicitopen-system contributions The latter however is free from all the mass-dependentextra terms and thus takes the familiar structure known from classical continuumthermodynamics The mass-specimacrc format is believed to be particularly useful sinceit parallels the framework of the closed-system case Consequently permissible con-stitutive relations can be derived from the mass-specimacrc version of the dissipationinequality The underlying procedure has been illustrated for the model problem ofthermo-hyperelasticity
References
Bowen R M 1976 Theory of mixtures In Continuum physics vol III Mixtures and EM macreldtheories (ed A C Eringen) pp 1127 Academic
Carter D R amp Hayes W C 1977 The behavior of bone as a two-phase porous structure JBone Joint Surg Am 59 785794
Coleman B D amp Noll W 1963 The thermodynamics of elastic materials with heat conductionand viscosity Arch Ration Mech Analysis 13 167178
Cowin S C amp Hegedus D H 1976 Bone remodelling I Theory of adaptive elasticity JElastic 6 313326
Cowin S C amp Humphrey J D 2001 Cardiovascular soft tissue mechanics Dordrecht Kluwer
de Boer R 2000 Theory of porous media Springer
Diebels S 2000 Mikropolare Zweiphasenmodelle Formulierung auf der Basis der TheoriePoroser Medien Habilitationsschrift Bericht aus dem Institut fur Mechanik (Bauwesen)Nr II-4 Universitat Stuttgart
Ehlers W 2002 Foundations of multiphasic and porous materials In Porous media theoryexperiments and numerical applications (ed W Ehlers amp J Bluhm) pp 386 Springer
Epstein M amp Maugin G A 2000 Thermomechanics of volumetric growth in uniform bodiesInt J Plasticity 16 951978
Gibson L J amp Ashby M F 1997 The mechanics of three-dimensional cellular materials ProcR Soc Lond A 382 4359
Goldstein H 1950 Classical mechanics Addison-Wesley
Harrigan T P amp Hamilton J J 1993 Finite element simulation of adaptive bone remodellinga stability criterion and a time-stepping method Int J Numer Meth Engng 36 837854
Haupt P 2000 Continuum mechanics and theory of materials Springer
Humphrey J D 2002 Cardiovasular solid mechanics Springer
Humphrey J D amp Rajagopal K R 2002 A constrained mixture model for growth and remod-eling of soft tissues Math Models Meth Appl Sci 12 407430
Liu I S 1972 Method of Lagrange multipliers for exploitation of the entropy principle ArchRation Mech Analysis 46 131148
Liu I S 2002 Continuum mechanics Springer
Malvern L E 1969 Introduction to the mechanics of a continuous medium Englewood Clireg sNJ Prentice Hall
Maugin G A 1993 Material inhomogenities in elasticity London Chapman amp Hall
Maugin G A 1999 The thermomechanics of nonlinear irreversible behaviors World Scientimacrc
Muller I 1973 Thermodynamik die Grundlagen der Materialtheorie Dusseldorf BertelsmannUniversitatsverlag
Proc R Soc Lond A (2003)
2568 E Kuhl and P Steinmann
Muller I 1994 Grundzuge der Thermodynamik Springer
Runesson K 1978 On nonlinear consolidation of soft clay PhD thesis Department of StructuralMechanics Chalmers University of Technology Goteborg Sweden
Schrodinger E 1944 What is life Cambridge University Press
Taber L A 1995 Biomechanics of growth remodeling and morphogenesis Appl Mech Rev48 487545
Truesdell C amp Toupin R 1960 The classical macreld theories In Handbuch der Physik (edS Flugge) vol 3 Springer
Wu T Hutter K amp Svendsen B 1998 On shear deg ow of a saturated icesediment mixture withthermodynamic equilibrium pressure and momentum exchange Proc R Soc Lond A 4547188
Proc R Soc Lond A (2003)

2550 E Kuhl and P Steinmann
spatial-deformation gradient F and its Jacobian J
F = rXrsquo(X t) T B0 TBt J = det F gt 0 (22)
demacrne the linear tangent map from the material tangent space TB0 to the spatialtangent space TBt Typically the right and left CauchyGreen strain tensors C andb
C = F t cent F b = F cent F t (23)
or their inverses B = Ciexcl1 and c = biexcl1 are introduced as characteristic strainmeasures Moreover we shall distinguish between the material time derivative Dt =tfdeggjX of mass-specimacrc quantity fdegg at macrxed material placement X and the spatialtime derivative dt = tfdeggjx at macrxed spatial placement x The material and thespatial time derivative of any scalar- or vector-valued mass-specimacrc quantity fdegg arerelated via the Euler theorem
Dtfdegg = dtfdegg + rxfdegg cent v (24)
through the convective term rxfdegg cent v The spatial velocity v is introduced as thematerial time derivative of the spatial-motion map rsquo
v = Dtrsquo(X t) (25)
Its material gradient rXv is identical to the material time derivative of the spatial-deformation gradient F while the spatial-velocity gradient rxv will be denoted asl in the following equation
DtF = rXv l = rxv (26)
With these demacrnitions at hand the material time derivative of the Jacobian J can beexpressed through the well-known Euler identity DtJ = J div v with div v = F iexclt DtF denoting the spatial divergence of the spatial velocity v In the following wewill distinguish between volume-specimacrc scalar-valued or tensorial quantities withmaterial reference fdegg0 = raquo 0fdegg and with spatial reference fdeggt = raquo tfdegg wherebyfdegg denotes the mass-specimacrc density The integration of a quantity with materialreference over the material domain B0 yields the identical result as the integrationof a quantity with spatial reference over the spatial domain Bt
Z
B0
fdegg0 dV =Z
Bt
fdeggt dv (27)
The local counterpart of the above equation demacrnes the classical relation betweenvolume-specimacrc material and spatial quantities
fdegg0 = Jfdeggt (28)
Correspondingly we can relate any vector- or tensor-valued surface degux fcurreng throughthe boundary of the material domain B0 to the corresponding contribution fsectgthrough the spatial boundary Bt
Z
B0
fcurreng cent dA =Z
Bt
fsectg cent da (29)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2551
rsquo
F J DtF
B0 Bt
raquo 0
R
R0
raquo t
r
Rt
Figure 2 Balance of mass densities deg uxes and sources
By making use of the classical Nanson formula from 1878 as da = JF iexclt cent dA weobtain the local counterpart of the above equation
fcurreng = Jfsectg cent F iexclt (210)
a relation between the material and the spatial surface deguxes which can alternativelybe expressed as Divfcurreng = J divfsectg Moreover we will make use of the diregerentialform of Reynoldsrsquos transport theorem
jDtfdegg0 = dtfdeggt + div(fdeggt laquo v) (211)
which follows from the above considerations It states that the material time rateof change of the volume-specimacrc quantity fdegg0 in a material domain B0 is equal tothe spatial time rate of change of the volume-specimacrc quantity fdeggt in the spatialdomain Bt plus the degux fdeggt laquo v through the surface Bt of the moving domainWhile Reynoldsrsquos transport theorem (211) will later on be applied to relate spatialand material quantities in the volume-specimacrc format the Euler theorem (24) willserve to relate the corresponding mass-specimacrc quantities
With the introduced demacrnitions at hand we will now elaborate the balance equa-tions for open systems For the sake of transparency we shall assume that suplusmncientsmoothness criteria are fulmacrlled by the related macrelds of the balanced quantity itselffdegg0 or fdeggt the related deguxes fcurreng and fsectg and the corresponding source termsfmacrg0 and fmacrgt Consequently instead of analysing the global or integral form of thebalance laws
Dt
Z
B0
fdegg0 dV =Z
B0
fcurreng cent dA +Z
B0
fmacrg0 dV
dt
Z
Bt
fdeggt dv +Z
Bt
[fdeggt laquo v] cent da =Z
Bt
fsectg cent da +Z
Bt
fmacrgt dv
9gtgtgt=
gtgtgt(212)
we will restrict ourselves to their local or rather diregerential format
Dtfdegg0 = Divfcurreng + fmacrg0
dtfdeggt + div(fdeggt laquo v) = divfsectg + fmacrgt
)
(213)
3 Balance of mass
In classical non-relativistic mechanics of closed systems the quantity of matter in abody B0 does not change irrespective of the motion the deformation and the accel-eration of the body However this conservation of mass is a mere demacrnition which is
Proc R Soc Lond A (2003)
2552 E Kuhl and P Steinmann
no longer valid for open systems like the ones considered here In abstract terms thelocal balance of mass of open systems states that the rate of change of the materialor spatial density raquo 0 or raquo t is equal to the sum of the divergence of the related massdegux R or r and the mass source R0 or Rt (see macrgure 2) Note that most existingtheories for open systems except for the one developed by Epstein amp Maugin (2000)a priori exclude the in- or outdegux of mass as R = 0 and r = 0 The leaching of port-landite or the progressive decalcimacrcation of the calcium silicate hydrates in concretefurnish typical examples of an outdegux of mass in chemomechanical applications Cellmigration is another example of a mass degux typically encountered in biomechanicalproblems In principle it always is possible to express any degux term R or r throughan equivalent source term of the form Div R or div r according to the `equivalence ofsurface and volume sourcesrsquo as stated by Truesdell amp Toupin (1960 x 157) Howeverwe shall allow for independent degux terms in the following to keep the underlyingtheory as general as possible Consequently the material version of the balance ofmass can be stated as
Dt raquo 0 = Div R + R0 (31)
The individual terms in the above equation can be pushed forward with the help ofthe standard Piola transforms
raquo 0 = J raquo t R0 = JRt R = Jr cent F iexclt (32)
Note that in classical continuum mechanics with R = 0 and R0 = 0 equa-tion (32)1 is usually referred to as the `material continuity equationrsquo The applicationof Reynoldsrsquos transport theorem (211)
jDt raquo 0 = dt raquo t + div( raquo tv) (33)
introduces the spatial version of the balance of mass
dt raquo t + div( raquo tv) = div r + Rt (34)
Equation (34) which was introduced as the `spatial continuity equationrsquo by Euler in1757 represents one of the basic equations in classical deguid mechanics in the contextof closed systems with r = 0 and Rt = 0 In the following we shall distinguishbetween the material and the spatial version of the balance of mass given in theform
Dt raquo 0 = Div R + R0 dt raquo t + div( raquo tv) = div r + Rt (35)
Remark 31 (volume- and mass-specimacrc formats) In the present theorythe balance of mass plays a central role since it can essentially be used to transformthe volume-specimacrc version of any other balance law to its mass-specimacrc counterpartIn the volume-specimacrc format the quantity to be balanced can either be given withmaterial or spatial reference as fdegg0 = raquo 0fdegg or fdeggt = raquo tfdegg It is balanced withthe sum of the divergence of the corresponding deguxes fcurreng and fsectg and the volumesources fmacrg0 and fmacrgt
Dtfdegg0 = Divfcurreng + fmacrg0 dtfdeggt + div(fdeggt laquo v) = divfsectg + fmacrgt (36)
The material and spatial versions of a balance law (36)1 and (36)2 respectivelyare related through the corresponding Piola transforms fdegg0 = Jfdeggt fmacrg0 = Jfmacrgt
and fcurreng = Jfsectg cent F iexclt in combination with Reynoldsrsquos transport theorem (211)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2553
rsquo
F J DtF
B0 Bt
p0
brvbar t
b0
pt
frac14 t
bt
Figure 3 Balance of momentum momentum densities deg uxes and sources
Note that the deguxes fcurreng and fsectg can be expressed in terms of the reduced deguxterms f sup1curreng and fsup1sectg in the form
fcurreng = fsup1curreng + fdegg laquo R fsectg = fsup1sectg + fdegg laquo r (37)
Correspondingly the volume-specimacrc source terms are demacrned in terms of the reducedsource terms fsup1g0 and fsup1gt
fmacrg0 = fsup1g0 + fdeggR0 iexcl rXfdegg cent R fmacrgt = fsup1gt + fdeggRt iexcl rxfdegg cent r (38)
Each balance law can thus be transformed into a mass-specimacrc version balancingthe rate of change of the mass-specimacrc quantity fdegg = fdegg0=raquo 0 or fdegg = fdeggt=raquo t withthe corresponding reduced degux f sup1curreng and fsup1sectg and the reduced source terms fsup1g0
and fsup1gt The mass-specimacrc balance equations can be derived by subtracting fdeggtimes the balance of mass (35) from the corresponding volume-specimacrc version (36)Consequently we obtain remarkably simple generic forms of the mass-specimacrc balancelaws
raquo 0 Dtfdegg = Divfsup1curreng + fsup1g0 raquo t dtfdegg + raquo tv cent rxfdegg = divfsup1sectg + fsup1gt (39)
which are related through the Piola transforms fdegg0 = Jfdeggt fsup1g0 = Jfsup1gt andf sup1curreng = Jfsup1sectg cent F iexclt and the Euler theorem (24) Note that the mass-specimacrc formatis free from all the explicit extra terms caused by the changes in mass Howeverthis is not the case in the formulation developed by Epstein amp Maugin (2000) wherethe gradient terms rXfdegg cent R and rxfdegg cent r are part of the mass-specimacrc balanceequation (39)
4 Balance of momentum
Bearing in mind the derivation of the generic balance laws of the preceding sectionwe now elaborate their specimacrcation to yield the balance of linear momentum It willturn out that the balance of angular momentum and the balance of kinetic energy canbe interpreted as particular weighted versions of the balance of linear momentum
(a) Volume-specimacrc version
The balance of momentum represents one of the `laws of classical mechanicsrsquo Forclosed systems it was macrrst specimacred by Euler in 1776 It states that in an inertialframe the reaction of any body is equal to the load acting upon it Therein thereaction is characterized through the volume-specimacrc momentum density p0 or pt
Proc R Soc Lond A (2003)
2554 E Kuhl and P Steinmann
canonically demacrned as a spatial covector given through the partial derivative of thevolume-specimacrc kinetic-energy density K0 or Kt
K0 = 12raquo 0v cent v Kt = 1
2raquo tv cent v (41)
with respect to the spatial velocity v
p0 = v K0 = raquo 0v pt = v Kt = raquo tv (42)
The load can essentially be divided into two types namely the contact or surfaceforces represented by the momentum deguxes brvbar t and frac14 t and the at-a-distance forcesie the momentum sources b0 and bt (see macrgure 3) Consequently the material versionof the volume-specimacrc balance of momentum sometimes also referred to as `Cauchyrsquosmacrrst law of motionrsquo can be expressed as
Dtp0 = Div brvbar t + b0 (43)
In honour of the work of Piola in 1833 and Kirchhoreg in 1852 the momentum degux brvbar t
is typically referred to as the macrrst PiolaKirchhoreg stress tensor in classical continuummechanics With the help of the well-known Piola transforms
p0 = Jpt b0 = Jbt brvbar t = J frac14 t cent F iexclt (44)
the individual terms of equation (43) can be pushed forward to the spatial conmacrgu-ration The corresponding momentum degux frac14 t is commonly denoted as the Cauchystress tensor in standard continuum mechanics commemorating the early work ofCauchy in 1823 The application of Reynoldsrsquos transport theorem (211)
jDtp0 = dtpt + div(pt laquo v) (45)
yields the spatial version of the balance of momentum
dtpt + div(pt laquo v) = div frac14 t + bt (46)
which is typically applied in classical deguid mechanics The overall degux term frac14 t iexclpt laquo v redegects the convective nature of the above equation through the transport oflinear momentum pt laquo v In summary we distinguish between the material and thespatial version of the volume-specimacrc balance of momentum
Dtp0 = Div brvbar t + b0 dtpt + div(pt laquo v) = div frac14 t + bt (47)
On the Neumann boundary characterized through the material and spatial normalN and n the normal projections of the momentum deguxes of PiolaKirchhoreg andCauchy type brvbar t and frac14 t are required to be in equilibrium with the correspondingclosed- and open-system stress-vector contributions tclos ed
0 or tclos edt and top en
0 ortop en
t respectively
brvbar t cent N = tclos ed0 + t op en
0 top en0 = sup1t op en
0 + [p laquo R] cent N
frac14 t cent n = tclos edt + t op en
t top ent = sup1t op en
t + [p laquo r] cent n
)
(48)
Correspondingly the momentum sources terms b0 and bt can be understood as thesum of the closed- and the open-system volumeforce contributions bclos ed
0 or bclos edt
and bop en0 or bop en
t
b0 = bclos ed0 + bop en
0 bop en0 = sup1bop en
0 + pR0 iexcl rXp cent R
bt = bclos edt + bop en
t bop ent = sup1bop en
t + pRt iexcl rxp cent r
)
(49)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2555
While the expressions in terms of R r R0 and Rt take into account the part ofthe newly created or indegowing mass that carries the same amount of mass-specimacrcmomentum p as the original substrate the additional terms sup1t op en
0 sup1t op ent sup1b op en
0 andsup1b op en
t account for a possible diregerence in the momentum density
Remark 41 (balance of angular momentum) The volume-specimacrc angular-momentum density l0 or lt is demacrned through the vector product of the correspondinglinear momentum density p0 or pt with a distance vector a = rsquo iexcl rsquo0 from a macrxedpoint rsquo0 in space
l0 = a pound p0 lt = a pound pt (410)
In the absence of distributed couples and internal rotational degrees of freedom thevolume-specimacrc balance of angular momentum for open systems can be derived bytaking the vector product of the volume-specimacrc momentum balance (47) with thedistance vector a
a pound Dtp0 = a pound Div brvbar t + a pound b0 (411)
With the demacrnition of the angular momentum (410) the above equation can berewritten as
Dtl0 = Div(a pound brvbar t) + a pound b0 iexcl F pound brvbar t (412)
Thereby the vector product of the two second-order tensors iexcl F pound brvbar t can beexpressed in terms of the axial vector of the related second-order tensor [F cent brvbar ]axlas iexcl F pound brvbar t = 2[F cent brvbar ]axl It proves convenient for later purposes to reformulate theabove statement in terms of the reduced momentum degux sup1brvbar t = brvbar t iexcl p laquo R andthe reduced momentum source sup1b0 = b0 iexcl pR0 + rXp cent R
Dtl0 = Div(a pound [ sup1brvbar t +p laquoR])+a pound [sup1b0 +pR0 iexcl rXp cent R] iexcl F pound [ sup1brvbar t +plaquoR] (413)
Herein the third term on the right-hand side
iexcl F pound [ sup1brvbar t + p laquo R] = 2[F cent [ sup1brvbar + R laquo p]]axl
represents the volume-specimacrc production of the angular momentum l0 Anticipatinglater considerations we would like to point out that assuming the symmetry of thereduced momentum degux F cent sup1brvbar = sup1brvbar t cent F t or equivalently sup1frac14 = sup1frac14 t the production ofangular momentum reduces to 2[F cent [R laquo p]]axl or 2[r laquo p]axl respectively
Remark 42 (balance of kinetic energy) Although the balance of kineticenergy does not constitute an independent balance law it proves signimacrcant to takea closer look at it since it will help to introduce work conjugate stress and strainmeasures Moreover the balance of kinetic energy will be used to identify the externaland internal mechanical power which are essential for our further thermodynamicalconsiderations The starting point is the material time derivative of the volume-specimacrc kinetic-energy density K0 = 1
2raquo 0v cent v
DtK0 = raquo 0 DtK + K Dt raquo 0 = p0 cent Dtv + K Dt raquo 0 = v cent Dtp0 iexcl K Dt raquo 0 (414)
With the projection of the volume-specimacrc balance of momentum (43) with the spa-tial velocity v and the balance of mass (35)1 weighted by the mass-specimacrc kinetic-energy density K
v cent Dtp0 = Div(v cent brvbar t) + v cent b0 iexcl rXv brvbar t
KDt raquo 0 = Div(KR) + KR0 iexcl rXK cent R
)
(415)
Proc R Soc Lond A (2003)
2556 E Kuhl and P Steinmann
equation (414) can be rewritten in the explicit form
DtK0 = Div(v cent brvbar t iexcl KR) + v cent b0 iexcl KR0 + rXK cent R iexcl brvbar t DtF (416)
In what follows it will prove convenient to reformulate the above equation in terms ofthe reduced momentum degux sup1brvbar t = brvbar t iexcl p laquo R and the reduced momentum sourcesup1b0 = b0 iexcl pR0 + rXp cent R which can be related to their overall counterparts brvbar t andb0 through the following identities
Div(v cent brvbar t) = Div(v cent sup1brvbar t) + Div(2KR)
v cent b0 = v cent sup1b0 + 2KR0 iexcl v cent rXp cent R
brvbar t DtF = sup1brvbar t DtF + p cent rXv cent R
9gtgt=
gtgt(417)
With the help of the above equations and the identity v cent rX p + p cent rXv = 2rXKfollowing from v cent p = 2K equation (416) can be reformulated in the following way
DtK0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R iexcl sup1brvbar t DtF (418)
As stated by Stokes in 1857 the rate of change of the kinetic energy is equal to theexternal mechanical power minus the internal mechanical power Consequently theright-hand side of the above equation enables the identimacrcation of the volume-specimacrcexternal and internal mechanical power pext
0 and pin t0
pext0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R
pin t0 = sup1brvbar t DtF
)(419)
whereby pext0 characterizes the total rate of working of mechanical actions on the
body This rate of working consists of the degux contribution v cent sup1brvbar t + KR and thesource term v cent sup1b0 + KR0 iexcl rXK cent R The internal mechanical power pin t
0 consistsexclusively of the production term for the kinetic energy as sup1brvbar t DtF The demacrnitionof the latter suggests the interpretation of the reduced momentum degux sup1brvbar t and thematerial time derivative of the deformation gradient DtF as work conjugate pairsWith the above abbreviations at hand the balance of kinetic energy can be rewrittenin a form which has been denoted as the local form the `theorem of energyrsquo by Maugin(1993)
DtK0 = pext0 iexcl pin t
0 dtKt + div(Ktv) = pextt iexcl pin t
t (420)
The spatial version of the balance of kinetic energy (420)2 follows naturally byapplying the appropriate Piola transforms K0 = JKt
pext0 = Jpext
t and pin t0 = Jpin t
t along with Reynoldsrsquos transport theorem (211)
(b) Mass-specimacrc version
The mass-specimacrc version of the balance of momentum is based on the mass-specimacrckinetic-energy density
K = 12v cent v (421)
demacrning the quantity to be balanced as its partial derivative with respect to thespatial velocity v
p = v K = v (422)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2557
The rate of change of the mass-specimacrc momentum density p ie the covariant spatialvelocity is balanced with the reduced momentum deguxes sup1brvbar t or sup1frac14 t and the reducedmomentum sources sup1b0 or sup1bt By subtracting the balance of mass (35) weighted bythe momentum density p from the volume-specimacrc momentum balance (47) we canderive the diregerent versions of the mass-specimacrc momentum balance
raquo 0Dtp = Div sup1brvbar t + sup1b0 raquo t dtp + raquo tv cent rxp = div sup1frac14 t + sup1bt (423)
The reduced momentum deguxes sup1brvbar t and sup1frac14 t which are related to the overall momen-tum deguxes brvbar t and frac14 t through sup1brvbar t = brvbar t iexcl p laquo R and sup1frac14 t = frac14 t iexcl p laquo r are deter-mined by the closed- and open-system stress-vector contributions tclos ed
0 and sup1t op en0
or tclos edt and sup1t op en
t respectively on the Neumann boundary
sup1brvbar t cent N = tclos ed0 + sup1t op en
0
sup1frac14 t cent n = tclos edt + sup1t op en
t
)(424)
while the reduced momentum sources sup1b0 and sup1bt are given as the sum of the classicalclosed-system volume force contributions bclos ed
0 or bclos edt and the reduced open-
system contributions sup1b op en0 or sup1b op en
t
sup1b0 = bclos ed0 + sup1bop en
0
sup1bt = bclos edt + sup1bop en
t
)(425)
Note that the mass-specimacrc momentum balance (423) is free from all the explicitextra terms caused by the changes in mass The indeguence of the open system mani-fests itself only implicitly through the prescribed boundary terms sup1t op en
0 and sup1t op ent and
the prescribed volume sources sup1b op en0 and sup1b op en
t The convective indeguence introducedthrough the raquo tv cent rxp term however is also present in the closed-system case
Remark 43 (balance of angular momentum) The mass-specimacrc angular-momentum density l is given as the vector product of the mass-specimacrc momentumdensity p with the distance vector a = rsquo iexcl rsquo0
l = a pound p (426)
Consequently the mass-specimacrc version of the balance of angular momentum followsfrom the vector product of the mass-specimacrc momentum balance (423) with thedistance vector a
a pound raquo 0Dtp = a pound Div sup1brvbar t + a pound sup1b0 (427)
By making use of the demacrnition (426) the above equation can be rewritten as
raquo 0Dtl = Div(a pound sup1brvbar t) + a pound sup1b0 iexcl F pound sup1brvbar t (428)
Again the third term on the right-hand side iexcl F pound sup1brvbar t = 2[F cent sup1brvbar ]axl representsthe production of the mass-specimacrc angular momentum l If we require the balanceof angular momentum to represent an individual independent statement
raquo 0Dtl = Div(a pound sup1brvbar t) + a pound sup1b0 (429)
this production term has to vanish identically This condition thus reveals the sym-metry requirements
F cent sup1brvbar = sup1brvbar t cent F t sup1frac14 = sup1frac14 t (430)
Proc R Soc Lond A (2003)
2558 E Kuhl and P Steinmann
The material and the spatial versions (430)1 and (430)2 respectively are relatedthrough the corresponding Piola transform sup1brvbar t = J sup1frac14 t cent F iexclt A comparison of thevolume-specimacrc statement (413) with its mass-specimacrc counterpart (429) indicatesthat the in- or outdegux of mass R or r produces an additional amount of angularmomentum unless
F cent R laquo p = p laquo R cent F t r laquo p = p laquo r (431)
ie the mass degux F centR or r is constitutively demacrned to be coaxial to the mass-specimacrcmomentum density p
Remark 44 (balance of kinetic energy) To investigate the mass-specimacrc ver-sion of the balance of kinetic energy we need to evaluate the material time derivativeof the mass-specimacrc kinetic-energy density K = 1
2v centv which can easily be derived by
subtracting the weighted balance of mass (415)2 from the material time derivativeof the volume-specimacrc kinetic-energy density K0 given in equation (418) as
raquo 0 DtK = DtK0 iexcl K Dt raquo 0 (432)
and thusraquo 0 DtK = Div(v cent sup1brvbar t) + v cent sup1bext
0 iexcl sup1brvbar t DtF (433)
Consequently we can identify the mass-specimacrc external and internal mechanicalpower sup1pext
0 and sup1pin t0 respectively
sup1pext0 = pext
0 iexcl KDt raquo 0 = Div(v cent sup1brvbar t) + v cent sup1b0
sup1pin t0 = pin t
0 = sup1brvbar t DtF
)(434)
It is worth noting that the diregerence of the mass- and volume-specimacrc formu-lation manifests itself only in the demacrnition of the external mechanical powersup1pext
0 = pext0 iexcl KDt raquo 0 while the mass-specimacrc internal power is identical to its volume-
specimacrc counterpart as sup1pin t0 = pin t
0 Consequently the material and the spatial versionof the mass-specimacrc balance of kinetic energy take the formats
raquo 0 DtK = sup1pext0 iexcl sup1pin t
0 raquo t dtK + raquo tv cent rxK = sup1pextt iexcl sup1pin t
t (435)
whereby both formulations are related through the corresponding Piola transformswith sup1pext
0 = J sup1pextt and sup1pin t
0 = Jsup1pin tt and the Euler theorem (24)
5 Balance of energy
The balance of total energy as a representation of the macrrst law of thermodynamicsbalances the rate of change of the volume-specimacrc total energy density E0 or Et asthe sum of the kinetic and internal energy density E0 = K0 + I0 or Et = Kt + It
with the external power In classical continuum mechanics of closed systems thisexternal power is composed of a purely mechanical contribution pext
0 or pextt and a
non-mechanical thermal contribution qext0 or qext
t Therefore the balance of energy issometimes referred to as the `principle of interconvertibility of heat and mechanicalworkrsquo a notion which was known to Carnot in 1832 and experimentally verimacredby Joule in 1843 However when dealing with open systems we have to generalizethe demacrnition of the non-mechanical external power by including additional externalopen-system contributions in the demacrnition of qext
0 and qextt (cf Malvern 1969 x 54)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2559
rsquo
F J DtF
B0 Bt
E0
v cent brvbar t Q
v cent b0 Q0
Et
v cent frac14 t q
v cent bt Qt
Figure 4 Balance of energy energy densities deg uxes and sources
(a) Volume-specimacrc version
For the spatial-motion problem the rate of change of the volume-specimacrc totalenergy density E0 = raquo 0E can be expressed in the form (cf macrgure 4)
DtE0 = Div(v cent sup1brvbar t iexcl sup1Q + ER) + v cent sup1b0 + sup1Q0 + ER0 iexcl rXE cent R (51)
Thereby in addition to the purely mechanical external power pext0 demacrned in equa-
tion (419) we have included the non-mechanical external power qext0 accounting
for the classical thermal eregects of the closed system and the additional open-systemeregects as an additional non-mechanical supply of energy
qext0 = Div( iexcl Q) + Q0 (52)
Similar to the mechanical power the non-mechanical power consists of a degux and asource contribution denoted by Q and Q0 respectively The former is composed ofthe reduced outward non-mechanical energy degux sup1Q modimacred by the explicit extradegux due to the open system IR while the latter is the sum of the reduced non-mechanical energy source sup1Q0 enhanced by the explicit eregects of the open systemIR0 and rXI cent R
pext0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R
qext0 = Div( iexcl sup1Q + IR) + sup1Q0 + IR0 iexcl rXI cent R
)
(53)
Equation (51) can thus be reformulated in the concise form
DtE0 = pext0 + qext
0 dtEt + div(Etv) = pextt + qext
t (54)
which for the classical closed-system case dates back to the early works of Duhem in1892 Again the spatial version (54)2 follows from the appropriate Piola transformsE0 = JEt
pext0 = Jpext
t qext0 = Jqext
t Q = Jq cent F iexclt and sup1Q = J sup1q cent F iexclt along withReynoldsrsquos transport theorem (211) The demacrnition of the non-mechanical energydeguxes Q and q parallels the introduction of the macrrst PiolaKirchhoreg stress tensorbrvbar and the Cauchy stress frac14 On the Neumann boundary the non-mechanical energydeguxes Q and q are given in terms of the normal projection of the classical heat deguxdensities qclos ed
0 and qclos edt and the additional open-system contributions qop en
0 andqop en
t Q cent N = qclos ed
0 + qop en0 qop en
0 = sup1q op en0 iexcl IR cent N
q cent n = qclos edt + qop en
t qop ent = sup1q op en
t iexcl Ir cent n
)(55)
Proc R Soc Lond A (2003)
2560 E Kuhl and P Steinmann
Moreover the non-mechanical energy sources Q0 and Qt can be understood as thesum of the classical heat source Qclos ed
0 and Qclos edt and an additional non-mechanical
energy source taking into account the nature of the open system Qop en0 and Qop en
t
Q0 = Qclos ed0 + Qop en
0 Qop en0 = sup1Qop en
0 + IR0 iexcl rXI cent R
Qt = Qclos edt + Qop en
t Qop ent = sup1Qop en
t + IRt iexcl rxI cent r
)(56)
In formal analogy to the demacrnition of the momentum quantities the expressions interms of R r R0 and Rt take into account the part of the newly added mass thatcarries the same amount of non-mechanical energy as the original substrate while theadditional open-system terms sup1q op en
0 sup1q op ent sup1Qop en
0 and sup1Qop ent account for a possible
diregerence in non-mechanical energy
Remark 51 (balance of internal energy) For further thermodynamical con-siderations it proves convenient to consider the volume-specimacrc internal energy den-sity I0 = E0 iexcl K0 or It = Et iexcl Kt given as the diregerence of the corresponding totalenergy density and the kinetic-energy density Consequently the two versions of thebalance of internal energy follow from subtracting the balance of kinetic energy (420)from the total energy balance (54)
DtI0 = pin t0 + qext
0 dtIt + div(Itv) = pin tt + qext
t (57)
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the equations derived above balances the mass-specimacrc energy density E = E0=raquo 0 with the mass-specimacrc external mechanical powersup1pext
0 introduced in (434) and the mass-specimacrc non-mechanical power sup1qext0 as
sup1qext0 = qext
0 iexcl IDt raquo 0 = iexcl Div sup1Q + sup1Q0 (58)
The corresponding balance equations
raquo 0 DtE = sup1pext0 + sup1qext
0 raquo t dtE + raquo tv cent rxE = sup1pextt + sup1qext
t (59)
follow from subtracting the corresponding balance of mass (35) weighted by the totalenergy E from the volume-specimacrc energy balance (54) The spatial version (59)2can be derived by applying the corresponding Piola transforms with sup1pext
0 = Jsup1pextt and
sup1qext0 = J sup1qext
t and the Euler theorem (24) Again we can relate the reduced energydeguxes sup1Q and sup1q demacrned through sup1Q = Q iexcl IR and sup1q = q iexcl Ir to the classical heatdegux qclos ed
0 or qclos edt and the energy degux caused by additional eregects of the open
system sup1q op en0 and sup1q op en
t
sup1Q cent N = qclos ed0 + sup1q op en
0
sup1q cent n = qclos edt + sup1q op en
t
)(510)
Moreover the reduced non-mechanical energy sources sup1Q0 and sup1Qt are given as the sumof the classical heat source of a closed system Qclos ed
0 and Qclos edt and the additional
open-system contribution to the energy sup1Qop en0 and sup1Qop en
t
sup1Q0 = Qclos ed0 + sup1Qop en
0
sup1Qt = Qclos edt + sup1Qop en
t
)(511)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2561
Again as opposed to the formulation developed by Epstein amp Maugin (2000) themass-specimacrc format is free from all the explicit extra terms caused by changes inmass and thus resembles the balance of energy known from classical mechanics
Remark 52 (balance of internal energy) A reduction to the balance ofinternal energy I = E iexcl K follows from subtracting the balance of kinetic energy(435) from the balance of total energy (59)
raquo 0 DtI = sup1pin t0 + sup1qext
0 raquo t dtI + raquo tv cent rxI = sup1pin tt + sup1qext
t (512)
6 Balance of entropy
The macrrst law of thermodynamics in the form of the balance of energy expressesthe interconvertibility of heat and work However the balance of energy itself doesnot place any restrictions on the direction of the thermodynamical process Thesecond law of thermodynamics the balance of entropy postulates the existence ofan absolute temperature and of a specimacrc entropy as a state function Through theinternal production of the latter which is required to either vanish for reversibleprocesses or be strictly positive for irreversible processes a direction is imposedon the thermodynamical process Recall that when dealing with open systems amacrxed material volume B0 is allowed to constantly gain or lose mass Open systemsnaturally exhibit an additional entropy degux and entropy source caused by the addedmass as pointed out earlier in the famous monograph by Schrodinger (1944 x 6) aswell as by Malvern (1969 x 56) or also recently by Epstein amp Maugin (2000) Theindeguence of changes in mass on the entropy is twofold On the one hand it is redegectedthrough the explicit open-system entropy degux SR and the related source terms SR0
and iexcl rXS cent R On the other hand we will introduce the reduced entropy degux andsource sup1H and sup1H0 respectively which in turn split into the extra non-mechanicalenergy terms sup1Q and sup1Q0 divided by the absolute temperature sup3 and an extra entropydegux and source S and S0 While the former parallel the introduction of the entropydegux and source in classical closed-system thermodynamics the contributions S andS0 account for the diregerence in entropy of the added mass and the original substrate
Remark 61 (balance of entropy versus entropy inequality) In the relatedliterature the entropy is often introduced through the entropy inequality For thesake of analogy we will treat the entropy as a balance quantity in the followingIts evolution is thus balanced with the sum of the external and internal entropyproduction whereby the latter is constrained to be non-negative throughout In thecase of closed-system thermodynamics this approach has been followed for exampleby Truesdell amp Toupin (1960 xx 256 and 257) Haupt (2000 x 33) or Liu (2002 x 5)
(a) Volume-specimacrc version
The balance of entropy balances the volume-specimacrc entropy density S0 = raquo 0S withthe external entropy input hext
0 and the internal entropy production hin t0 Thereby
the former consists of the entropy degux H across the material surface B0 and theentropy source H0 in the material domain B0 (cf macrgure 5)
hext0 = Div( iexcl H ) + H0 (61)
Proc R Soc Lond A (2003)
2562 E Kuhl and P Steinmann
rsquo
F J DtF
B0 Bt
S0
H S
H0 S0
St
h s
Ht St
Figure 5 Balance of entropy entropy densities deg uxes and sources
The external entropy degux H is introduced as the sum of the reduced external entropydegux sup1H enhanced by the explicit open-system contribution SR Accordingly theexternal entropy source H0 consists of the reduced entropy source sup1H0 modimacred byadditional terms SR0 and iexcl rXS cent R accounting for the explicit open-system con-tribution to the entropy supply
hext0 = Div( iexcl sup1H + SR) + sup1H0 + SR0 iexcl rXS cent R
hin t0 gt 0
)(62)
Just like in classical thermodynamics of closed systems the internal entropy produc-tion hin t
0 is required to be point-wise non-negative The balance of entropy can thusbe expressed in the following form
DtS0 = hext0 + hin t
0 dtSt + div(Stv) = hextt + hin t
t (63)
Again the material and the spatial version are related through the correspond-ing Piola transforms S0 = JSt
hext0 = Jhext
t hin t0 = Jhin t
t H = Jh cent F iexclt andsup1H = J sup1h cent F iexclt in combination with Reynoldsrsquos transport theorem Note that alter-
natively the balance of entropy which is primarily nothing but a formal demacrnitionof the entropy production can be recast into the inequality DtS0 iexcl hext
0 gt 0 Thiscondition which is typically referred to as `postulate of irreversibilityrsquo in classicalthermodynamics (see Truesdell amp Toupin 1960 x 258) induces a direction to thethermodynamic process Next we will introduce Neumann boundary conditions forthe spatial-motion Kirchhoreg and Cauchy type entropy degux H and h in terms of theclassical closed-system entropy degux contribution hclos ed
0 or hclos edt and the additional
open-system contribution hop en0 or hop en
t
H cent N = hclos ed0 + hop en
0 hop en0 = sup1hop en
0 iexcl SR cent N
h cent n = hclos edt + hop en
t hop ent = sup1hop en
t iexcl Sr cent n
)
(64)
Accordingly the entropy sources H0 and Ht are introduced as the sum of the classicalentropy source of the closed system Hclos ed
0 or Hclos edt and the additional entropy
source accounting for the nature of the open system Hop en0 or Hop en
t
H0 = Hclos ed0 + Hop en
0 Hop en0 = sup1Hop en
0 + SR0 iexcl rXS cent R
Ht = Hclos edt + Hop en
t Hop ent = sup1Hop en
t + SRt iexcl rxS cent r
)
(65)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2563
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the above equations states that the rate of changeof the mass-specimacrc entropy S = S0=raquo 0 is in equilibrium with the mass-specimacrcexternal entropy input sup1hext
0 and the mass-specimacrc internal entropy production sup1hin t0
which are introduced in the following way
sup1hext0 = hext
0 iexcl SDt raquo 0 = iexcl Div sup1H + sup1H0
sup1hin t0 = hin t
0 gt 0
)
(66)
The resulting material and spatial version of the balance of entropy
raquo 0 DtS = sup1hext0 + sup1hin t
0 raquo t dtS + raquo tv cent rxS = sup1hextt + sup1hin t
t (67)
which can be derived by subtracting S times the balance of mass (35) from thevolume-specimacrc balance of entropy (63) are related via the appropriate Piola trans-forms sup1hext
0 = Jsup1hextt and sup1hin t
0 = Jsup1hin tt and the Euler theorem (24) Moreover we can
relate the reduced entropy deguxes sup1H and sup1h demacrned through sup1H = H iexcl SR andsup1h = h iexcl Sr to the classical entropy degux of the closed system hclos ed
0 or hclos edt and
the entropy degux caused by additional eregects of the open system sup1hop en0 or sup1hop en
t
sup1H cent N = hclos ed0 + sup1hop en
0
sup1h cent n = hclos edt + sup1hop en
t
)(68)
Accordingly the reduced entropy sources sup1H0 = H0 iexcl SR0 + rXS cent R and sup1Ht = Ht iexclSRt + rxS cent r are given as the sum of the classical closed-system entropy sourceHclos ed
0 or Hclos edt and the additional open-system contribution to the entropy source
sup1Hop en0 or sup1Hop en
t sup1H0 = Hclos ed
0 + sup1Hop en0
sup1Ht = Hclos edt + sup1Hop en
t
)
(69)
Remark 62 (dissipation inequality) For further elaboration it proves con-venient to set up relations between the reduced entropy degux sup1H and the reducednon-mechanical energy degux sup1Q and between the reduced entropy source sup1H0 and thereduced non-mechanical energy source sup1Q0 in terms of the absolute temperature sup3 an extra entropy degux S and an extra entropy source S0
sup1H =1sup3
sup1Q + S sup1H0 =1sup3
sup1Q0 + S0 (610)
The above equations can be understood as a generalization of the ideas of Cowinamp Hegedus (1976) who have suggested including the additional entropy source S0
accounting for changes in entropy caused by changes in mass that are not consideredimplicitly through the changes in energy sup1Q0 Both the additional entropy degux S andthe entropy source S0 which we shall summarize in the term s
0 = iexcl Div S + S0 inthe following have to be determined constitutively These additional terms can beunderstood as an explicit representation of the exchange of entropy with the `outsideworldrsquo We now turn to the evaluation of the above-stated second law of thermo-dynamics by recasting it into an appropriate form of the dissipation inequality astatement that places further restrictions on the form of the constitutive response
Proc R Soc Lond A (2003)
2564 E Kuhl and P Steinmann
functions For this purpose we shall interpret the internal entropy production sup1hin t0 as
a measure for the degree of irreversibility introducing the dissipation rate sup1d0 as the
internal entropy production weighted by the absolute temperature as sup1d0 = sup3 sup1hin t
0 gt 0With the help of the balance of entropy (67)1 the relations (610) and the bal-ance of internal energy (512)1 the dissipation rate can be reformulated to yield theClausiusDuhem inequality in an internal energy based fashion
sup1d0 = sup1pin t
0 iexcl raquo 0Dt[I iexcl sup3 S ] iexcl raquo 0S Dt sup3 iexcl s0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (611)
By making use of the appropriate LegendreFenchel transform introducing theHelmholtz free energy ordf = I iexcl sup3 S we end up with the classical free-energy-basedversion of the ClausiusDuhem inequality
sup1d0 = sup1brvbar t DtF iexcl raquo 0 Dt ordf iexcl raquo 0S Dt sup3 iexcl s
0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (612)
which is particularly useful when the temperature sup3 rather than the entropy S isused as the independent variable In classical thermodynamics the ClausiusDuheminequality (612) is typically decomposed into a local and a conductive contributionsup1d loc
0 and sup1dcon0
sup1d loc0 = sup1brvbar t DtF iexcl raquo 0Dt ordf iexcl raquo 0SDt sup3 iexcl s
0 sup3 gt 0 sup1d con0 = iexcl sup1Q cent rX ln sup3 gt 0 (613)
whereby the local term sup1d loc0 gt 0 represents the ClausiusPlanck inequality for open
systems while the remaining conductive term sup1dcon0 gt 0 is typically referred to as a
Fourier inequality As a suplusmncient condition for sup1d0 gt 0 both inequalities are required
to hold separately In what follows we shall apply the dissipation inequality (613) toderive constitutive equations for the reduced momentum degux sup1brvbar t and the entropy SIn addition the evaluation of the dissipation inequality places further restrictions onthe extra entropy exchange s
0 The underlying procedure will be highlighted in detailfor the simple model problem of thermo-hyperelasticity in the following section
Remark 63 Note that at this stage the introduction of the reduced entropydegux and source sup1H = sup1Q=sup3 + S and sup1H0 = sup1Q0=sup3 + S0 as introduced in equations(610) is a mere constitutive assumption Nevertheless for particular constitutive-model problems the postulated relations can be verimacred through the evaluation ofthe dissipation inequality according to Muller (1973) and Liu (1972) (see also Liu2002) It will turn out that in most cases equations (610) are justimacred with thetrivial solution S = 0 and S0 = 0 However assuming this result from the veryoutset might be too restrictive for complex constitutive models as also pointed outby Epstein amp Maugin (2000)
7 Thermo-hyperelasticity
We are now in a position to exploit the second law of thermodynamics in the formof the ClausiusDuhem inequality along the lines of Coleman amp Noll (1963) Thestraightforward evaluation of the local part of the dissipation inequality in the formof the ClausiusPlanck inequality (613)1 will result in the demacrnition of the reducedmomentum degux sup1brvbar and the mass-specimacrc entropy density S Its conductive sup-plement (613)2 the Fourier inequality suggests the demacrnition of the reduced non-mechanical energy degux sup1Q along the lines of the classical linear heat conduction intro-duced by Fourier in 1822 Finally the mass degux R will be introduced constitutively
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2565
in the context of classical linear mass diregusion according to Fickrsquos law Here wewill thus restrict ourselves to a thermo-hyperelastic-model problem for which all thedissipation is caused exclusively by heat conduction and possibly by an additionalopen-system contribution of the `outside worldrsquo In what follows we shall make useof the multiplicative decomposition of the free energy ordf 0
ordf 0 = raquo 0 ordf (71)
Thereby the mass-specimacrc free-energy density ordf is expressed in terms of the materialdensity raquo 0 the deformation gradient F and the absolute temperature sup3 with a pos-sible explicit dependence on the material placement X Within the thermodynamicsof open systems the material density raquo 0 is allowed to vary in space and time is thusintroduced as function of the material placement X and the time t
ordf = ordf ( raquo 0 F sup3 X) raquo 0 = raquo 0(X t) (72)
Consequently the material time derivative of the free-energy density is formally givenin the form
Dt ordf = D raquo 0ordf Dt raquo 0 + DF ordf DtF + D sup3 ordf Dt sup3 (73)
The evaluation of the ClausiusPlanck inequality (613)1
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 + [ sup1brvbar t iexcl raquo 0DF ordf ] DtF iexcl [ raquo 0S + raquo 0 D sup3 ordf ] Dt sup3 iexcl s0 sup3 gt 0 (74)
demacrnes the reduced macrrst PiolaKirchhoreg stress tensor sup1brvbar t and the mass-specimacrcentropy S as thermodynamically conjugate variables to the deformation gradientF and the absolute temperature sup3
sup1brvbar t = raquo 0 DF ordf S = iexcl D sup3 ordf (75)
As in Cowin amp Hegedus (1976) we are left with a reduced inequality of the form
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 iexcl s0 sup3 gt 0 (76)
In biomechanics the simplest choice for the free-energy function ordf for cellular mate-rials such as open-pored biological tissues is based on the classical isotropic Neo-Hookean-type free-energy function weighted by the actual relative density [ raquo 0=raquo curren
0]n
(see for example Carter amp Hayes 1977 Gibson amp Ashby 1997)
ordf =middot
raquo 0
raquo curren0
cedil[niexcl1] 1raquo curren
0
[12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]] (77)
Here para and middot denote the classical Lamparae constants and n is an additional exponentusually allowed to vary between 1 6 n 6 35 A selection of more advanced free-energy functions for orthotropic biological tissues can be found for example in therecent collection of publications by Cowin amp Humphrey (2001) The derivatives of thefree energy ordf with respect to the material density raquo 0 and the deformation gradientF take the format
D raquo 0ordf = [n iexcl 1]
middotraquo 0
raquo curren0
cedil[niexcl2]middot 1raquo curren
0
cedil2
[ 12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]]
DF ordf =middot
raquo 0
raquo curren0
cedil[niexcl1]middot 1raquo curren
0
cedil[ middot F + [ para ln J iexcl middot ]F iexclt]
9gtgtgtgt=
gtgtgtgt
(78)
Proc R Soc Lond A (2003)
2566 E Kuhl and P Steinmann
whereby the macrrst derivative can alternatively be expressed as D raquo 0ordf = [n iexcl 1] ordf =raquo 0
According to equation (75) the reduced macrrst PiolaKirchhoreg stress tensor
sup1brvbar t =middot
raquo 0
raquo curren0
cediln
[ middot F + [ para ln J iexcl middot ]F iexclt] (79)
can be understood as the classical Neo-Hookean stress tensor weighted by the actualrelative density [ raquo 0=raquo curren
0]n The reduced dissipation inequality
iexcl [n iexcl 1] ordf [Div R + R0] + sup3 [Div S iexcl S0] gt 0 (710)
places implicit restrictions on the dissipation generated by the density evolution Dt raquo 0
through the mass degux R and the mass source R0 This amount of dissipation hasat least to be compensated by an appropriate constitutive assumption for the extraexternal entropy input s
0 through the extra entropy degux S and the extra entropysource S0 eg
S = [n iexcl 1] ordf1sup3
R S0 = iexcl [n iexcl 1] ordf1sup3
R0 (711)
Similar to the context of chemomechanics the degux r or R is usually related to thespatial or material gradient of the density rx raquo 0 or rX raquo 0 as
r = R0b cent rx raquo 0 R = rtB cent rX raquo 0 (712)
in analogy to Fickrsquos law for concentrations Here R0 and rt denote the mass-conduction coeplusmncient introducing either a materially or a spatially isotropicresponse In the context of biomechanics we typically macrnd variations of the con-stitutive equation
R0 =middot
raquo 0
raquo curren0
cediliexclm
ordf 0 iexcl ordf curren0 (713)
for the mass source R0 where raquo curren0 and ordf curren
0 denote the reference density and the refer-ence free energy respectively while m is an additional exponent that is commonlychosen to m gt n (see Harrigan amp Hamilton 1993) Finally the evaluation of theFourier inequality (613)2 as sup1d con
0 = iexcl sup1Q cent rX ln sup3 gt 0 suggests the demacrnition of themass-specimacrc non-mechanical energy degux sup1q or sup1Q according to Fourierrsquos law as
sup1q = iexcl K0b cent rx sup3 sup1Q = iexcl ktB cent rX sup3 (714)
with K0 and kt denoting the materially or spatially isotropic conductivity In order toa priori guarantee the satisfaction of the Fourier inequality (613)2 the conductivityis required to be non-negative K0 gt 0 and kt gt 0
8 Conclusion
We have presented a general framework for the thermodynamics of open systemsThe derived macreld equations are believed to be particularly useful in biomechanicalor chemomechanical applications where attention is conmacrned to one individual sub-system of the overall matter present Due to the fact that this open subsystem isallowed to constantly gain or lose mass the balance of mass had to be enhancedby additional surface and volume terms redegecting the interaction with the `outsideworldrsquo Since the newly created mass carries a particular amount of momentum
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2567
energy and entropy all the other balance equations had to be reformulated as wellTo clarify the indeguence of the changes in mass we have introduced the notions of`volume-specimacrcrsquo and `mass-specimacrcrsquo formats The former accounts for the total indegu-ence of the changes in mass through explicit mass-dependent and additional implicitopen-system contributions The latter however is free from all the mass-dependentextra terms and thus takes the familiar structure known from classical continuumthermodynamics The mass-specimacrc format is believed to be particularly useful sinceit parallels the framework of the closed-system case Consequently permissible con-stitutive relations can be derived from the mass-specimacrc version of the dissipationinequality The underlying procedure has been illustrated for the model problem ofthermo-hyperelasticity
References
Bowen R M 1976 Theory of mixtures In Continuum physics vol III Mixtures and EM macreldtheories (ed A C Eringen) pp 1127 Academic
Carter D R amp Hayes W C 1977 The behavior of bone as a two-phase porous structure JBone Joint Surg Am 59 785794
Coleman B D amp Noll W 1963 The thermodynamics of elastic materials with heat conductionand viscosity Arch Ration Mech Analysis 13 167178
Cowin S C amp Hegedus D H 1976 Bone remodelling I Theory of adaptive elasticity JElastic 6 313326
Cowin S C amp Humphrey J D 2001 Cardiovascular soft tissue mechanics Dordrecht Kluwer
de Boer R 2000 Theory of porous media Springer
Diebels S 2000 Mikropolare Zweiphasenmodelle Formulierung auf der Basis der TheoriePoroser Medien Habilitationsschrift Bericht aus dem Institut fur Mechanik (Bauwesen)Nr II-4 Universitat Stuttgart
Ehlers W 2002 Foundations of multiphasic and porous materials In Porous media theoryexperiments and numerical applications (ed W Ehlers amp J Bluhm) pp 386 Springer
Epstein M amp Maugin G A 2000 Thermomechanics of volumetric growth in uniform bodiesInt J Plasticity 16 951978
Gibson L J amp Ashby M F 1997 The mechanics of three-dimensional cellular materials ProcR Soc Lond A 382 4359
Goldstein H 1950 Classical mechanics Addison-Wesley
Harrigan T P amp Hamilton J J 1993 Finite element simulation of adaptive bone remodellinga stability criterion and a time-stepping method Int J Numer Meth Engng 36 837854
Haupt P 2000 Continuum mechanics and theory of materials Springer
Humphrey J D 2002 Cardiovasular solid mechanics Springer
Humphrey J D amp Rajagopal K R 2002 A constrained mixture model for growth and remod-eling of soft tissues Math Models Meth Appl Sci 12 407430
Liu I S 1972 Method of Lagrange multipliers for exploitation of the entropy principle ArchRation Mech Analysis 46 131148
Liu I S 2002 Continuum mechanics Springer
Malvern L E 1969 Introduction to the mechanics of a continuous medium Englewood Clireg sNJ Prentice Hall
Maugin G A 1993 Material inhomogenities in elasticity London Chapman amp Hall
Maugin G A 1999 The thermomechanics of nonlinear irreversible behaviors World Scientimacrc
Muller I 1973 Thermodynamik die Grundlagen der Materialtheorie Dusseldorf BertelsmannUniversitatsverlag
Proc R Soc Lond A (2003)
2568 E Kuhl and P Steinmann
Muller I 1994 Grundzuge der Thermodynamik Springer
Runesson K 1978 On nonlinear consolidation of soft clay PhD thesis Department of StructuralMechanics Chalmers University of Technology Goteborg Sweden
Schrodinger E 1944 What is life Cambridge University Press
Taber L A 1995 Biomechanics of growth remodeling and morphogenesis Appl Mech Rev48 487545
Truesdell C amp Toupin R 1960 The classical macreld theories In Handbuch der Physik (edS Flugge) vol 3 Springer
Wu T Hutter K amp Svendsen B 1998 On shear deg ow of a saturated icesediment mixture withthermodynamic equilibrium pressure and momentum exchange Proc R Soc Lond A 4547188
Proc R Soc Lond A (2003)

Thermodynamics for open systems 2551
rsquo
F J DtF
B0 Bt
raquo 0
R
R0
raquo t
r
Rt
Figure 2 Balance of mass densities deg uxes and sources
By making use of the classical Nanson formula from 1878 as da = JF iexclt cent dA weobtain the local counterpart of the above equation
fcurreng = Jfsectg cent F iexclt (210)
a relation between the material and the spatial surface deguxes which can alternativelybe expressed as Divfcurreng = J divfsectg Moreover we will make use of the diregerentialform of Reynoldsrsquos transport theorem
jDtfdegg0 = dtfdeggt + div(fdeggt laquo v) (211)
which follows from the above considerations It states that the material time rateof change of the volume-specimacrc quantity fdegg0 in a material domain B0 is equal tothe spatial time rate of change of the volume-specimacrc quantity fdeggt in the spatialdomain Bt plus the degux fdeggt laquo v through the surface Bt of the moving domainWhile Reynoldsrsquos transport theorem (211) will later on be applied to relate spatialand material quantities in the volume-specimacrc format the Euler theorem (24) willserve to relate the corresponding mass-specimacrc quantities
With the introduced demacrnitions at hand we will now elaborate the balance equa-tions for open systems For the sake of transparency we shall assume that suplusmncientsmoothness criteria are fulmacrlled by the related macrelds of the balanced quantity itselffdegg0 or fdeggt the related deguxes fcurreng and fsectg and the corresponding source termsfmacrg0 and fmacrgt Consequently instead of analysing the global or integral form of thebalance laws
Dt
Z
B0
fdegg0 dV =Z
B0
fcurreng cent dA +Z
B0
fmacrg0 dV
dt
Z
Bt
fdeggt dv +Z
Bt
[fdeggt laquo v] cent da =Z
Bt
fsectg cent da +Z
Bt
fmacrgt dv
9gtgtgt=
gtgtgt(212)
we will restrict ourselves to their local or rather diregerential format
Dtfdegg0 = Divfcurreng + fmacrg0
dtfdeggt + div(fdeggt laquo v) = divfsectg + fmacrgt
)
(213)
3 Balance of mass
In classical non-relativistic mechanics of closed systems the quantity of matter in abody B0 does not change irrespective of the motion the deformation and the accel-eration of the body However this conservation of mass is a mere demacrnition which is
Proc R Soc Lond A (2003)
2552 E Kuhl and P Steinmann
no longer valid for open systems like the ones considered here In abstract terms thelocal balance of mass of open systems states that the rate of change of the materialor spatial density raquo 0 or raquo t is equal to the sum of the divergence of the related massdegux R or r and the mass source R0 or Rt (see macrgure 2) Note that most existingtheories for open systems except for the one developed by Epstein amp Maugin (2000)a priori exclude the in- or outdegux of mass as R = 0 and r = 0 The leaching of port-landite or the progressive decalcimacrcation of the calcium silicate hydrates in concretefurnish typical examples of an outdegux of mass in chemomechanical applications Cellmigration is another example of a mass degux typically encountered in biomechanicalproblems In principle it always is possible to express any degux term R or r throughan equivalent source term of the form Div R or div r according to the `equivalence ofsurface and volume sourcesrsquo as stated by Truesdell amp Toupin (1960 x 157) Howeverwe shall allow for independent degux terms in the following to keep the underlyingtheory as general as possible Consequently the material version of the balance ofmass can be stated as
Dt raquo 0 = Div R + R0 (31)
The individual terms in the above equation can be pushed forward with the help ofthe standard Piola transforms
raquo 0 = J raquo t R0 = JRt R = Jr cent F iexclt (32)
Note that in classical continuum mechanics with R = 0 and R0 = 0 equa-tion (32)1 is usually referred to as the `material continuity equationrsquo The applicationof Reynoldsrsquos transport theorem (211)
jDt raquo 0 = dt raquo t + div( raquo tv) (33)
introduces the spatial version of the balance of mass
dt raquo t + div( raquo tv) = div r + Rt (34)
Equation (34) which was introduced as the `spatial continuity equationrsquo by Euler in1757 represents one of the basic equations in classical deguid mechanics in the contextof closed systems with r = 0 and Rt = 0 In the following we shall distinguishbetween the material and the spatial version of the balance of mass given in theform
Dt raquo 0 = Div R + R0 dt raquo t + div( raquo tv) = div r + Rt (35)
Remark 31 (volume- and mass-specimacrc formats) In the present theorythe balance of mass plays a central role since it can essentially be used to transformthe volume-specimacrc version of any other balance law to its mass-specimacrc counterpartIn the volume-specimacrc format the quantity to be balanced can either be given withmaterial or spatial reference as fdegg0 = raquo 0fdegg or fdeggt = raquo tfdegg It is balanced withthe sum of the divergence of the corresponding deguxes fcurreng and fsectg and the volumesources fmacrg0 and fmacrgt
Dtfdegg0 = Divfcurreng + fmacrg0 dtfdeggt + div(fdeggt laquo v) = divfsectg + fmacrgt (36)
The material and spatial versions of a balance law (36)1 and (36)2 respectivelyare related through the corresponding Piola transforms fdegg0 = Jfdeggt fmacrg0 = Jfmacrgt
and fcurreng = Jfsectg cent F iexclt in combination with Reynoldsrsquos transport theorem (211)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2553
rsquo
F J DtF
B0 Bt
p0
brvbar t
b0
pt
frac14 t
bt
Figure 3 Balance of momentum momentum densities deg uxes and sources
Note that the deguxes fcurreng and fsectg can be expressed in terms of the reduced deguxterms f sup1curreng and fsup1sectg in the form
fcurreng = fsup1curreng + fdegg laquo R fsectg = fsup1sectg + fdegg laquo r (37)
Correspondingly the volume-specimacrc source terms are demacrned in terms of the reducedsource terms fsup1g0 and fsup1gt
fmacrg0 = fsup1g0 + fdeggR0 iexcl rXfdegg cent R fmacrgt = fsup1gt + fdeggRt iexcl rxfdegg cent r (38)
Each balance law can thus be transformed into a mass-specimacrc version balancingthe rate of change of the mass-specimacrc quantity fdegg = fdegg0=raquo 0 or fdegg = fdeggt=raquo t withthe corresponding reduced degux f sup1curreng and fsup1sectg and the reduced source terms fsup1g0
and fsup1gt The mass-specimacrc balance equations can be derived by subtracting fdeggtimes the balance of mass (35) from the corresponding volume-specimacrc version (36)Consequently we obtain remarkably simple generic forms of the mass-specimacrc balancelaws
raquo 0 Dtfdegg = Divfsup1curreng + fsup1g0 raquo t dtfdegg + raquo tv cent rxfdegg = divfsup1sectg + fsup1gt (39)
which are related through the Piola transforms fdegg0 = Jfdeggt fsup1g0 = Jfsup1gt andf sup1curreng = Jfsup1sectg cent F iexclt and the Euler theorem (24) Note that the mass-specimacrc formatis free from all the explicit extra terms caused by the changes in mass Howeverthis is not the case in the formulation developed by Epstein amp Maugin (2000) wherethe gradient terms rXfdegg cent R and rxfdegg cent r are part of the mass-specimacrc balanceequation (39)
4 Balance of momentum
Bearing in mind the derivation of the generic balance laws of the preceding sectionwe now elaborate their specimacrcation to yield the balance of linear momentum It willturn out that the balance of angular momentum and the balance of kinetic energy canbe interpreted as particular weighted versions of the balance of linear momentum
(a) Volume-specimacrc version
The balance of momentum represents one of the `laws of classical mechanicsrsquo Forclosed systems it was macrrst specimacred by Euler in 1776 It states that in an inertialframe the reaction of any body is equal to the load acting upon it Therein thereaction is characterized through the volume-specimacrc momentum density p0 or pt
Proc R Soc Lond A (2003)
2554 E Kuhl and P Steinmann
canonically demacrned as a spatial covector given through the partial derivative of thevolume-specimacrc kinetic-energy density K0 or Kt
K0 = 12raquo 0v cent v Kt = 1
2raquo tv cent v (41)
with respect to the spatial velocity v
p0 = v K0 = raquo 0v pt = v Kt = raquo tv (42)
The load can essentially be divided into two types namely the contact or surfaceforces represented by the momentum deguxes brvbar t and frac14 t and the at-a-distance forcesie the momentum sources b0 and bt (see macrgure 3) Consequently the material versionof the volume-specimacrc balance of momentum sometimes also referred to as `Cauchyrsquosmacrrst law of motionrsquo can be expressed as
Dtp0 = Div brvbar t + b0 (43)
In honour of the work of Piola in 1833 and Kirchhoreg in 1852 the momentum degux brvbar t
is typically referred to as the macrrst PiolaKirchhoreg stress tensor in classical continuummechanics With the help of the well-known Piola transforms
p0 = Jpt b0 = Jbt brvbar t = J frac14 t cent F iexclt (44)
the individual terms of equation (43) can be pushed forward to the spatial conmacrgu-ration The corresponding momentum degux frac14 t is commonly denoted as the Cauchystress tensor in standard continuum mechanics commemorating the early work ofCauchy in 1823 The application of Reynoldsrsquos transport theorem (211)
jDtp0 = dtpt + div(pt laquo v) (45)
yields the spatial version of the balance of momentum
dtpt + div(pt laquo v) = div frac14 t + bt (46)
which is typically applied in classical deguid mechanics The overall degux term frac14 t iexclpt laquo v redegects the convective nature of the above equation through the transport oflinear momentum pt laquo v In summary we distinguish between the material and thespatial version of the volume-specimacrc balance of momentum
Dtp0 = Div brvbar t + b0 dtpt + div(pt laquo v) = div frac14 t + bt (47)
On the Neumann boundary characterized through the material and spatial normalN and n the normal projections of the momentum deguxes of PiolaKirchhoreg andCauchy type brvbar t and frac14 t are required to be in equilibrium with the correspondingclosed- and open-system stress-vector contributions tclos ed
0 or tclos edt and top en
0 ortop en
t respectively
brvbar t cent N = tclos ed0 + t op en
0 top en0 = sup1t op en
0 + [p laquo R] cent N
frac14 t cent n = tclos edt + t op en
t top ent = sup1t op en
t + [p laquo r] cent n
)
(48)
Correspondingly the momentum sources terms b0 and bt can be understood as thesum of the closed- and the open-system volumeforce contributions bclos ed
0 or bclos edt
and bop en0 or bop en
t
b0 = bclos ed0 + bop en
0 bop en0 = sup1bop en
0 + pR0 iexcl rXp cent R
bt = bclos edt + bop en
t bop ent = sup1bop en
t + pRt iexcl rxp cent r
)
(49)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2555
While the expressions in terms of R r R0 and Rt take into account the part ofthe newly created or indegowing mass that carries the same amount of mass-specimacrcmomentum p as the original substrate the additional terms sup1t op en
0 sup1t op ent sup1b op en
0 andsup1b op en
t account for a possible diregerence in the momentum density
Remark 41 (balance of angular momentum) The volume-specimacrc angular-momentum density l0 or lt is demacrned through the vector product of the correspondinglinear momentum density p0 or pt with a distance vector a = rsquo iexcl rsquo0 from a macrxedpoint rsquo0 in space
l0 = a pound p0 lt = a pound pt (410)
In the absence of distributed couples and internal rotational degrees of freedom thevolume-specimacrc balance of angular momentum for open systems can be derived bytaking the vector product of the volume-specimacrc momentum balance (47) with thedistance vector a
a pound Dtp0 = a pound Div brvbar t + a pound b0 (411)
With the demacrnition of the angular momentum (410) the above equation can berewritten as
Dtl0 = Div(a pound brvbar t) + a pound b0 iexcl F pound brvbar t (412)
Thereby the vector product of the two second-order tensors iexcl F pound brvbar t can beexpressed in terms of the axial vector of the related second-order tensor [F cent brvbar ]axlas iexcl F pound brvbar t = 2[F cent brvbar ]axl It proves convenient for later purposes to reformulate theabove statement in terms of the reduced momentum degux sup1brvbar t = brvbar t iexcl p laquo R andthe reduced momentum source sup1b0 = b0 iexcl pR0 + rXp cent R
Dtl0 = Div(a pound [ sup1brvbar t +p laquoR])+a pound [sup1b0 +pR0 iexcl rXp cent R] iexcl F pound [ sup1brvbar t +plaquoR] (413)
Herein the third term on the right-hand side
iexcl F pound [ sup1brvbar t + p laquo R] = 2[F cent [ sup1brvbar + R laquo p]]axl
represents the volume-specimacrc production of the angular momentum l0 Anticipatinglater considerations we would like to point out that assuming the symmetry of thereduced momentum degux F cent sup1brvbar = sup1brvbar t cent F t or equivalently sup1frac14 = sup1frac14 t the production ofangular momentum reduces to 2[F cent [R laquo p]]axl or 2[r laquo p]axl respectively
Remark 42 (balance of kinetic energy) Although the balance of kineticenergy does not constitute an independent balance law it proves signimacrcant to takea closer look at it since it will help to introduce work conjugate stress and strainmeasures Moreover the balance of kinetic energy will be used to identify the externaland internal mechanical power which are essential for our further thermodynamicalconsiderations The starting point is the material time derivative of the volume-specimacrc kinetic-energy density K0 = 1
2raquo 0v cent v
DtK0 = raquo 0 DtK + K Dt raquo 0 = p0 cent Dtv + K Dt raquo 0 = v cent Dtp0 iexcl K Dt raquo 0 (414)
With the projection of the volume-specimacrc balance of momentum (43) with the spa-tial velocity v and the balance of mass (35)1 weighted by the mass-specimacrc kinetic-energy density K
v cent Dtp0 = Div(v cent brvbar t) + v cent b0 iexcl rXv brvbar t
KDt raquo 0 = Div(KR) + KR0 iexcl rXK cent R
)
(415)
Proc R Soc Lond A (2003)
2556 E Kuhl and P Steinmann
equation (414) can be rewritten in the explicit form
DtK0 = Div(v cent brvbar t iexcl KR) + v cent b0 iexcl KR0 + rXK cent R iexcl brvbar t DtF (416)
In what follows it will prove convenient to reformulate the above equation in terms ofthe reduced momentum degux sup1brvbar t = brvbar t iexcl p laquo R and the reduced momentum sourcesup1b0 = b0 iexcl pR0 + rXp cent R which can be related to their overall counterparts brvbar t andb0 through the following identities
Div(v cent brvbar t) = Div(v cent sup1brvbar t) + Div(2KR)
v cent b0 = v cent sup1b0 + 2KR0 iexcl v cent rXp cent R
brvbar t DtF = sup1brvbar t DtF + p cent rXv cent R
9gtgt=
gtgt(417)
With the help of the above equations and the identity v cent rX p + p cent rXv = 2rXKfollowing from v cent p = 2K equation (416) can be reformulated in the following way
DtK0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R iexcl sup1brvbar t DtF (418)
As stated by Stokes in 1857 the rate of change of the kinetic energy is equal to theexternal mechanical power minus the internal mechanical power Consequently theright-hand side of the above equation enables the identimacrcation of the volume-specimacrcexternal and internal mechanical power pext
0 and pin t0
pext0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R
pin t0 = sup1brvbar t DtF
)(419)
whereby pext0 characterizes the total rate of working of mechanical actions on the
body This rate of working consists of the degux contribution v cent sup1brvbar t + KR and thesource term v cent sup1b0 + KR0 iexcl rXK cent R The internal mechanical power pin t
0 consistsexclusively of the production term for the kinetic energy as sup1brvbar t DtF The demacrnitionof the latter suggests the interpretation of the reduced momentum degux sup1brvbar t and thematerial time derivative of the deformation gradient DtF as work conjugate pairsWith the above abbreviations at hand the balance of kinetic energy can be rewrittenin a form which has been denoted as the local form the `theorem of energyrsquo by Maugin(1993)
DtK0 = pext0 iexcl pin t
0 dtKt + div(Ktv) = pextt iexcl pin t
t (420)
The spatial version of the balance of kinetic energy (420)2 follows naturally byapplying the appropriate Piola transforms K0 = JKt
pext0 = Jpext
t and pin t0 = Jpin t
t along with Reynoldsrsquos transport theorem (211)
(b) Mass-specimacrc version
The mass-specimacrc version of the balance of momentum is based on the mass-specimacrckinetic-energy density
K = 12v cent v (421)
demacrning the quantity to be balanced as its partial derivative with respect to thespatial velocity v
p = v K = v (422)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2557
The rate of change of the mass-specimacrc momentum density p ie the covariant spatialvelocity is balanced with the reduced momentum deguxes sup1brvbar t or sup1frac14 t and the reducedmomentum sources sup1b0 or sup1bt By subtracting the balance of mass (35) weighted bythe momentum density p from the volume-specimacrc momentum balance (47) we canderive the diregerent versions of the mass-specimacrc momentum balance
raquo 0Dtp = Div sup1brvbar t + sup1b0 raquo t dtp + raquo tv cent rxp = div sup1frac14 t + sup1bt (423)
The reduced momentum deguxes sup1brvbar t and sup1frac14 t which are related to the overall momen-tum deguxes brvbar t and frac14 t through sup1brvbar t = brvbar t iexcl p laquo R and sup1frac14 t = frac14 t iexcl p laquo r are deter-mined by the closed- and open-system stress-vector contributions tclos ed
0 and sup1t op en0
or tclos edt and sup1t op en
t respectively on the Neumann boundary
sup1brvbar t cent N = tclos ed0 + sup1t op en
0
sup1frac14 t cent n = tclos edt + sup1t op en
t
)(424)
while the reduced momentum sources sup1b0 and sup1bt are given as the sum of the classicalclosed-system volume force contributions bclos ed
0 or bclos edt and the reduced open-
system contributions sup1b op en0 or sup1b op en
t
sup1b0 = bclos ed0 + sup1bop en
0
sup1bt = bclos edt + sup1bop en
t
)(425)
Note that the mass-specimacrc momentum balance (423) is free from all the explicitextra terms caused by the changes in mass The indeguence of the open system mani-fests itself only implicitly through the prescribed boundary terms sup1t op en
0 and sup1t op ent and
the prescribed volume sources sup1b op en0 and sup1b op en
t The convective indeguence introducedthrough the raquo tv cent rxp term however is also present in the closed-system case
Remark 43 (balance of angular momentum) The mass-specimacrc angular-momentum density l is given as the vector product of the mass-specimacrc momentumdensity p with the distance vector a = rsquo iexcl rsquo0
l = a pound p (426)
Consequently the mass-specimacrc version of the balance of angular momentum followsfrom the vector product of the mass-specimacrc momentum balance (423) with thedistance vector a
a pound raquo 0Dtp = a pound Div sup1brvbar t + a pound sup1b0 (427)
By making use of the demacrnition (426) the above equation can be rewritten as
raquo 0Dtl = Div(a pound sup1brvbar t) + a pound sup1b0 iexcl F pound sup1brvbar t (428)
Again the third term on the right-hand side iexcl F pound sup1brvbar t = 2[F cent sup1brvbar ]axl representsthe production of the mass-specimacrc angular momentum l If we require the balanceof angular momentum to represent an individual independent statement
raquo 0Dtl = Div(a pound sup1brvbar t) + a pound sup1b0 (429)
this production term has to vanish identically This condition thus reveals the sym-metry requirements
F cent sup1brvbar = sup1brvbar t cent F t sup1frac14 = sup1frac14 t (430)
Proc R Soc Lond A (2003)
2558 E Kuhl and P Steinmann
The material and the spatial versions (430)1 and (430)2 respectively are relatedthrough the corresponding Piola transform sup1brvbar t = J sup1frac14 t cent F iexclt A comparison of thevolume-specimacrc statement (413) with its mass-specimacrc counterpart (429) indicatesthat the in- or outdegux of mass R or r produces an additional amount of angularmomentum unless
F cent R laquo p = p laquo R cent F t r laquo p = p laquo r (431)
ie the mass degux F centR or r is constitutively demacrned to be coaxial to the mass-specimacrcmomentum density p
Remark 44 (balance of kinetic energy) To investigate the mass-specimacrc ver-sion of the balance of kinetic energy we need to evaluate the material time derivativeof the mass-specimacrc kinetic-energy density K = 1
2v centv which can easily be derived by
subtracting the weighted balance of mass (415)2 from the material time derivativeof the volume-specimacrc kinetic-energy density K0 given in equation (418) as
raquo 0 DtK = DtK0 iexcl K Dt raquo 0 (432)
and thusraquo 0 DtK = Div(v cent sup1brvbar t) + v cent sup1bext
0 iexcl sup1brvbar t DtF (433)
Consequently we can identify the mass-specimacrc external and internal mechanicalpower sup1pext
0 and sup1pin t0 respectively
sup1pext0 = pext
0 iexcl KDt raquo 0 = Div(v cent sup1brvbar t) + v cent sup1b0
sup1pin t0 = pin t
0 = sup1brvbar t DtF
)(434)
It is worth noting that the diregerence of the mass- and volume-specimacrc formu-lation manifests itself only in the demacrnition of the external mechanical powersup1pext
0 = pext0 iexcl KDt raquo 0 while the mass-specimacrc internal power is identical to its volume-
specimacrc counterpart as sup1pin t0 = pin t
0 Consequently the material and the spatial versionof the mass-specimacrc balance of kinetic energy take the formats
raquo 0 DtK = sup1pext0 iexcl sup1pin t
0 raquo t dtK + raquo tv cent rxK = sup1pextt iexcl sup1pin t
t (435)
whereby both formulations are related through the corresponding Piola transformswith sup1pext
0 = J sup1pextt and sup1pin t
0 = Jsup1pin tt and the Euler theorem (24)
5 Balance of energy
The balance of total energy as a representation of the macrrst law of thermodynamicsbalances the rate of change of the volume-specimacrc total energy density E0 or Et asthe sum of the kinetic and internal energy density E0 = K0 + I0 or Et = Kt + It
with the external power In classical continuum mechanics of closed systems thisexternal power is composed of a purely mechanical contribution pext
0 or pextt and a
non-mechanical thermal contribution qext0 or qext
t Therefore the balance of energy issometimes referred to as the `principle of interconvertibility of heat and mechanicalworkrsquo a notion which was known to Carnot in 1832 and experimentally verimacredby Joule in 1843 However when dealing with open systems we have to generalizethe demacrnition of the non-mechanical external power by including additional externalopen-system contributions in the demacrnition of qext
0 and qextt (cf Malvern 1969 x 54)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2559
rsquo
F J DtF
B0 Bt
E0
v cent brvbar t Q
v cent b0 Q0
Et
v cent frac14 t q
v cent bt Qt
Figure 4 Balance of energy energy densities deg uxes and sources
(a) Volume-specimacrc version
For the spatial-motion problem the rate of change of the volume-specimacrc totalenergy density E0 = raquo 0E can be expressed in the form (cf macrgure 4)
DtE0 = Div(v cent sup1brvbar t iexcl sup1Q + ER) + v cent sup1b0 + sup1Q0 + ER0 iexcl rXE cent R (51)
Thereby in addition to the purely mechanical external power pext0 demacrned in equa-
tion (419) we have included the non-mechanical external power qext0 accounting
for the classical thermal eregects of the closed system and the additional open-systemeregects as an additional non-mechanical supply of energy
qext0 = Div( iexcl Q) + Q0 (52)
Similar to the mechanical power the non-mechanical power consists of a degux and asource contribution denoted by Q and Q0 respectively The former is composed ofthe reduced outward non-mechanical energy degux sup1Q modimacred by the explicit extradegux due to the open system IR while the latter is the sum of the reduced non-mechanical energy source sup1Q0 enhanced by the explicit eregects of the open systemIR0 and rXI cent R
pext0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R
qext0 = Div( iexcl sup1Q + IR) + sup1Q0 + IR0 iexcl rXI cent R
)
(53)
Equation (51) can thus be reformulated in the concise form
DtE0 = pext0 + qext
0 dtEt + div(Etv) = pextt + qext
t (54)
which for the classical closed-system case dates back to the early works of Duhem in1892 Again the spatial version (54)2 follows from the appropriate Piola transformsE0 = JEt
pext0 = Jpext
t qext0 = Jqext
t Q = Jq cent F iexclt and sup1Q = J sup1q cent F iexclt along withReynoldsrsquos transport theorem (211) The demacrnition of the non-mechanical energydeguxes Q and q parallels the introduction of the macrrst PiolaKirchhoreg stress tensorbrvbar and the Cauchy stress frac14 On the Neumann boundary the non-mechanical energydeguxes Q and q are given in terms of the normal projection of the classical heat deguxdensities qclos ed
0 and qclos edt and the additional open-system contributions qop en
0 andqop en
t Q cent N = qclos ed
0 + qop en0 qop en
0 = sup1q op en0 iexcl IR cent N
q cent n = qclos edt + qop en
t qop ent = sup1q op en
t iexcl Ir cent n
)(55)
Proc R Soc Lond A (2003)
2560 E Kuhl and P Steinmann
Moreover the non-mechanical energy sources Q0 and Qt can be understood as thesum of the classical heat source Qclos ed
0 and Qclos edt and an additional non-mechanical
energy source taking into account the nature of the open system Qop en0 and Qop en
t
Q0 = Qclos ed0 + Qop en
0 Qop en0 = sup1Qop en
0 + IR0 iexcl rXI cent R
Qt = Qclos edt + Qop en
t Qop ent = sup1Qop en
t + IRt iexcl rxI cent r
)(56)
In formal analogy to the demacrnition of the momentum quantities the expressions interms of R r R0 and Rt take into account the part of the newly added mass thatcarries the same amount of non-mechanical energy as the original substrate while theadditional open-system terms sup1q op en
0 sup1q op ent sup1Qop en
0 and sup1Qop ent account for a possible
diregerence in non-mechanical energy
Remark 51 (balance of internal energy) For further thermodynamical con-siderations it proves convenient to consider the volume-specimacrc internal energy den-sity I0 = E0 iexcl K0 or It = Et iexcl Kt given as the diregerence of the corresponding totalenergy density and the kinetic-energy density Consequently the two versions of thebalance of internal energy follow from subtracting the balance of kinetic energy (420)from the total energy balance (54)
DtI0 = pin t0 + qext
0 dtIt + div(Itv) = pin tt + qext
t (57)
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the equations derived above balances the mass-specimacrc energy density E = E0=raquo 0 with the mass-specimacrc external mechanical powersup1pext
0 introduced in (434) and the mass-specimacrc non-mechanical power sup1qext0 as
sup1qext0 = qext
0 iexcl IDt raquo 0 = iexcl Div sup1Q + sup1Q0 (58)
The corresponding balance equations
raquo 0 DtE = sup1pext0 + sup1qext
0 raquo t dtE + raquo tv cent rxE = sup1pextt + sup1qext
t (59)
follow from subtracting the corresponding balance of mass (35) weighted by the totalenergy E from the volume-specimacrc energy balance (54) The spatial version (59)2can be derived by applying the corresponding Piola transforms with sup1pext
0 = Jsup1pextt and
sup1qext0 = J sup1qext
t and the Euler theorem (24) Again we can relate the reduced energydeguxes sup1Q and sup1q demacrned through sup1Q = Q iexcl IR and sup1q = q iexcl Ir to the classical heatdegux qclos ed
0 or qclos edt and the energy degux caused by additional eregects of the open
system sup1q op en0 and sup1q op en
t
sup1Q cent N = qclos ed0 + sup1q op en
0
sup1q cent n = qclos edt + sup1q op en
t
)(510)
Moreover the reduced non-mechanical energy sources sup1Q0 and sup1Qt are given as the sumof the classical heat source of a closed system Qclos ed
0 and Qclos edt and the additional
open-system contribution to the energy sup1Qop en0 and sup1Qop en
t
sup1Q0 = Qclos ed0 + sup1Qop en
0
sup1Qt = Qclos edt + sup1Qop en
t
)(511)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2561
Again as opposed to the formulation developed by Epstein amp Maugin (2000) themass-specimacrc format is free from all the explicit extra terms caused by changes inmass and thus resembles the balance of energy known from classical mechanics
Remark 52 (balance of internal energy) A reduction to the balance ofinternal energy I = E iexcl K follows from subtracting the balance of kinetic energy(435) from the balance of total energy (59)
raquo 0 DtI = sup1pin t0 + sup1qext
0 raquo t dtI + raquo tv cent rxI = sup1pin tt + sup1qext
t (512)
6 Balance of entropy
The macrrst law of thermodynamics in the form of the balance of energy expressesthe interconvertibility of heat and work However the balance of energy itself doesnot place any restrictions on the direction of the thermodynamical process Thesecond law of thermodynamics the balance of entropy postulates the existence ofan absolute temperature and of a specimacrc entropy as a state function Through theinternal production of the latter which is required to either vanish for reversibleprocesses or be strictly positive for irreversible processes a direction is imposedon the thermodynamical process Recall that when dealing with open systems amacrxed material volume B0 is allowed to constantly gain or lose mass Open systemsnaturally exhibit an additional entropy degux and entropy source caused by the addedmass as pointed out earlier in the famous monograph by Schrodinger (1944 x 6) aswell as by Malvern (1969 x 56) or also recently by Epstein amp Maugin (2000) Theindeguence of changes in mass on the entropy is twofold On the one hand it is redegectedthrough the explicit open-system entropy degux SR and the related source terms SR0
and iexcl rXS cent R On the other hand we will introduce the reduced entropy degux andsource sup1H and sup1H0 respectively which in turn split into the extra non-mechanicalenergy terms sup1Q and sup1Q0 divided by the absolute temperature sup3 and an extra entropydegux and source S and S0 While the former parallel the introduction of the entropydegux and source in classical closed-system thermodynamics the contributions S andS0 account for the diregerence in entropy of the added mass and the original substrate
Remark 61 (balance of entropy versus entropy inequality) In the relatedliterature the entropy is often introduced through the entropy inequality For thesake of analogy we will treat the entropy as a balance quantity in the followingIts evolution is thus balanced with the sum of the external and internal entropyproduction whereby the latter is constrained to be non-negative throughout In thecase of closed-system thermodynamics this approach has been followed for exampleby Truesdell amp Toupin (1960 xx 256 and 257) Haupt (2000 x 33) or Liu (2002 x 5)
(a) Volume-specimacrc version
The balance of entropy balances the volume-specimacrc entropy density S0 = raquo 0S withthe external entropy input hext
0 and the internal entropy production hin t0 Thereby
the former consists of the entropy degux H across the material surface B0 and theentropy source H0 in the material domain B0 (cf macrgure 5)
hext0 = Div( iexcl H ) + H0 (61)
Proc R Soc Lond A (2003)
2562 E Kuhl and P Steinmann
rsquo
F J DtF
B0 Bt
S0
H S
H0 S0
St
h s
Ht St
Figure 5 Balance of entropy entropy densities deg uxes and sources
The external entropy degux H is introduced as the sum of the reduced external entropydegux sup1H enhanced by the explicit open-system contribution SR Accordingly theexternal entropy source H0 consists of the reduced entropy source sup1H0 modimacred byadditional terms SR0 and iexcl rXS cent R accounting for the explicit open-system con-tribution to the entropy supply
hext0 = Div( iexcl sup1H + SR) + sup1H0 + SR0 iexcl rXS cent R
hin t0 gt 0
)(62)
Just like in classical thermodynamics of closed systems the internal entropy produc-tion hin t
0 is required to be point-wise non-negative The balance of entropy can thusbe expressed in the following form
DtS0 = hext0 + hin t
0 dtSt + div(Stv) = hextt + hin t
t (63)
Again the material and the spatial version are related through the correspond-ing Piola transforms S0 = JSt
hext0 = Jhext
t hin t0 = Jhin t
t H = Jh cent F iexclt andsup1H = J sup1h cent F iexclt in combination with Reynoldsrsquos transport theorem Note that alter-
natively the balance of entropy which is primarily nothing but a formal demacrnitionof the entropy production can be recast into the inequality DtS0 iexcl hext
0 gt 0 Thiscondition which is typically referred to as `postulate of irreversibilityrsquo in classicalthermodynamics (see Truesdell amp Toupin 1960 x 258) induces a direction to thethermodynamic process Next we will introduce Neumann boundary conditions forthe spatial-motion Kirchhoreg and Cauchy type entropy degux H and h in terms of theclassical closed-system entropy degux contribution hclos ed
0 or hclos edt and the additional
open-system contribution hop en0 or hop en
t
H cent N = hclos ed0 + hop en
0 hop en0 = sup1hop en
0 iexcl SR cent N
h cent n = hclos edt + hop en
t hop ent = sup1hop en
t iexcl Sr cent n
)
(64)
Accordingly the entropy sources H0 and Ht are introduced as the sum of the classicalentropy source of the closed system Hclos ed
0 or Hclos edt and the additional entropy
source accounting for the nature of the open system Hop en0 or Hop en
t
H0 = Hclos ed0 + Hop en
0 Hop en0 = sup1Hop en
0 + SR0 iexcl rXS cent R
Ht = Hclos edt + Hop en
t Hop ent = sup1Hop en
t + SRt iexcl rxS cent r
)
(65)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2563
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the above equations states that the rate of changeof the mass-specimacrc entropy S = S0=raquo 0 is in equilibrium with the mass-specimacrcexternal entropy input sup1hext
0 and the mass-specimacrc internal entropy production sup1hin t0
which are introduced in the following way
sup1hext0 = hext
0 iexcl SDt raquo 0 = iexcl Div sup1H + sup1H0
sup1hin t0 = hin t
0 gt 0
)
(66)
The resulting material and spatial version of the balance of entropy
raquo 0 DtS = sup1hext0 + sup1hin t
0 raquo t dtS + raquo tv cent rxS = sup1hextt + sup1hin t
t (67)
which can be derived by subtracting S times the balance of mass (35) from thevolume-specimacrc balance of entropy (63) are related via the appropriate Piola trans-forms sup1hext
0 = Jsup1hextt and sup1hin t
0 = Jsup1hin tt and the Euler theorem (24) Moreover we can
relate the reduced entropy deguxes sup1H and sup1h demacrned through sup1H = H iexcl SR andsup1h = h iexcl Sr to the classical entropy degux of the closed system hclos ed
0 or hclos edt and
the entropy degux caused by additional eregects of the open system sup1hop en0 or sup1hop en
t
sup1H cent N = hclos ed0 + sup1hop en
0
sup1h cent n = hclos edt + sup1hop en
t
)(68)
Accordingly the reduced entropy sources sup1H0 = H0 iexcl SR0 + rXS cent R and sup1Ht = Ht iexclSRt + rxS cent r are given as the sum of the classical closed-system entropy sourceHclos ed
0 or Hclos edt and the additional open-system contribution to the entropy source
sup1Hop en0 or sup1Hop en
t sup1H0 = Hclos ed
0 + sup1Hop en0
sup1Ht = Hclos edt + sup1Hop en
t
)
(69)
Remark 62 (dissipation inequality) For further elaboration it proves con-venient to set up relations between the reduced entropy degux sup1H and the reducednon-mechanical energy degux sup1Q and between the reduced entropy source sup1H0 and thereduced non-mechanical energy source sup1Q0 in terms of the absolute temperature sup3 an extra entropy degux S and an extra entropy source S0
sup1H =1sup3
sup1Q + S sup1H0 =1sup3
sup1Q0 + S0 (610)
The above equations can be understood as a generalization of the ideas of Cowinamp Hegedus (1976) who have suggested including the additional entropy source S0
accounting for changes in entropy caused by changes in mass that are not consideredimplicitly through the changes in energy sup1Q0 Both the additional entropy degux S andthe entropy source S0 which we shall summarize in the term s
0 = iexcl Div S + S0 inthe following have to be determined constitutively These additional terms can beunderstood as an explicit representation of the exchange of entropy with the `outsideworldrsquo We now turn to the evaluation of the above-stated second law of thermo-dynamics by recasting it into an appropriate form of the dissipation inequality astatement that places further restrictions on the form of the constitutive response
Proc R Soc Lond A (2003)
2564 E Kuhl and P Steinmann
functions For this purpose we shall interpret the internal entropy production sup1hin t0 as
a measure for the degree of irreversibility introducing the dissipation rate sup1d0 as the
internal entropy production weighted by the absolute temperature as sup1d0 = sup3 sup1hin t
0 gt 0With the help of the balance of entropy (67)1 the relations (610) and the bal-ance of internal energy (512)1 the dissipation rate can be reformulated to yield theClausiusDuhem inequality in an internal energy based fashion
sup1d0 = sup1pin t
0 iexcl raquo 0Dt[I iexcl sup3 S ] iexcl raquo 0S Dt sup3 iexcl s0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (611)
By making use of the appropriate LegendreFenchel transform introducing theHelmholtz free energy ordf = I iexcl sup3 S we end up with the classical free-energy-basedversion of the ClausiusDuhem inequality
sup1d0 = sup1brvbar t DtF iexcl raquo 0 Dt ordf iexcl raquo 0S Dt sup3 iexcl s
0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (612)
which is particularly useful when the temperature sup3 rather than the entropy S isused as the independent variable In classical thermodynamics the ClausiusDuheminequality (612) is typically decomposed into a local and a conductive contributionsup1d loc
0 and sup1dcon0
sup1d loc0 = sup1brvbar t DtF iexcl raquo 0Dt ordf iexcl raquo 0SDt sup3 iexcl s
0 sup3 gt 0 sup1d con0 = iexcl sup1Q cent rX ln sup3 gt 0 (613)
whereby the local term sup1d loc0 gt 0 represents the ClausiusPlanck inequality for open
systems while the remaining conductive term sup1dcon0 gt 0 is typically referred to as a
Fourier inequality As a suplusmncient condition for sup1d0 gt 0 both inequalities are required
to hold separately In what follows we shall apply the dissipation inequality (613) toderive constitutive equations for the reduced momentum degux sup1brvbar t and the entropy SIn addition the evaluation of the dissipation inequality places further restrictions onthe extra entropy exchange s
0 The underlying procedure will be highlighted in detailfor the simple model problem of thermo-hyperelasticity in the following section
Remark 63 Note that at this stage the introduction of the reduced entropydegux and source sup1H = sup1Q=sup3 + S and sup1H0 = sup1Q0=sup3 + S0 as introduced in equations(610) is a mere constitutive assumption Nevertheless for particular constitutive-model problems the postulated relations can be verimacred through the evaluation ofthe dissipation inequality according to Muller (1973) and Liu (1972) (see also Liu2002) It will turn out that in most cases equations (610) are justimacred with thetrivial solution S = 0 and S0 = 0 However assuming this result from the veryoutset might be too restrictive for complex constitutive models as also pointed outby Epstein amp Maugin (2000)
7 Thermo-hyperelasticity
We are now in a position to exploit the second law of thermodynamics in the formof the ClausiusDuhem inequality along the lines of Coleman amp Noll (1963) Thestraightforward evaluation of the local part of the dissipation inequality in the formof the ClausiusPlanck inequality (613)1 will result in the demacrnition of the reducedmomentum degux sup1brvbar and the mass-specimacrc entropy density S Its conductive sup-plement (613)2 the Fourier inequality suggests the demacrnition of the reduced non-mechanical energy degux sup1Q along the lines of the classical linear heat conduction intro-duced by Fourier in 1822 Finally the mass degux R will be introduced constitutively
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2565
in the context of classical linear mass diregusion according to Fickrsquos law Here wewill thus restrict ourselves to a thermo-hyperelastic-model problem for which all thedissipation is caused exclusively by heat conduction and possibly by an additionalopen-system contribution of the `outside worldrsquo In what follows we shall make useof the multiplicative decomposition of the free energy ordf 0
ordf 0 = raquo 0 ordf (71)
Thereby the mass-specimacrc free-energy density ordf is expressed in terms of the materialdensity raquo 0 the deformation gradient F and the absolute temperature sup3 with a pos-sible explicit dependence on the material placement X Within the thermodynamicsof open systems the material density raquo 0 is allowed to vary in space and time is thusintroduced as function of the material placement X and the time t
ordf = ordf ( raquo 0 F sup3 X) raquo 0 = raquo 0(X t) (72)
Consequently the material time derivative of the free-energy density is formally givenin the form
Dt ordf = D raquo 0ordf Dt raquo 0 + DF ordf DtF + D sup3 ordf Dt sup3 (73)
The evaluation of the ClausiusPlanck inequality (613)1
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 + [ sup1brvbar t iexcl raquo 0DF ordf ] DtF iexcl [ raquo 0S + raquo 0 D sup3 ordf ] Dt sup3 iexcl s0 sup3 gt 0 (74)
demacrnes the reduced macrrst PiolaKirchhoreg stress tensor sup1brvbar t and the mass-specimacrcentropy S as thermodynamically conjugate variables to the deformation gradientF and the absolute temperature sup3
sup1brvbar t = raquo 0 DF ordf S = iexcl D sup3 ordf (75)
As in Cowin amp Hegedus (1976) we are left with a reduced inequality of the form
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 iexcl s0 sup3 gt 0 (76)
In biomechanics the simplest choice for the free-energy function ordf for cellular mate-rials such as open-pored biological tissues is based on the classical isotropic Neo-Hookean-type free-energy function weighted by the actual relative density [ raquo 0=raquo curren
0]n
(see for example Carter amp Hayes 1977 Gibson amp Ashby 1997)
ordf =middot
raquo 0
raquo curren0
cedil[niexcl1] 1raquo curren
0
[12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]] (77)
Here para and middot denote the classical Lamparae constants and n is an additional exponentusually allowed to vary between 1 6 n 6 35 A selection of more advanced free-energy functions for orthotropic biological tissues can be found for example in therecent collection of publications by Cowin amp Humphrey (2001) The derivatives of thefree energy ordf with respect to the material density raquo 0 and the deformation gradientF take the format
D raquo 0ordf = [n iexcl 1]
middotraquo 0
raquo curren0
cedil[niexcl2]middot 1raquo curren
0
cedil2
[ 12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]]
DF ordf =middot
raquo 0
raquo curren0
cedil[niexcl1]middot 1raquo curren
0
cedil[ middot F + [ para ln J iexcl middot ]F iexclt]
9gtgtgtgt=
gtgtgtgt
(78)
Proc R Soc Lond A (2003)
2566 E Kuhl and P Steinmann
whereby the macrrst derivative can alternatively be expressed as D raquo 0ordf = [n iexcl 1] ordf =raquo 0
According to equation (75) the reduced macrrst PiolaKirchhoreg stress tensor
sup1brvbar t =middot
raquo 0
raquo curren0
cediln
[ middot F + [ para ln J iexcl middot ]F iexclt] (79)
can be understood as the classical Neo-Hookean stress tensor weighted by the actualrelative density [ raquo 0=raquo curren
0]n The reduced dissipation inequality
iexcl [n iexcl 1] ordf [Div R + R0] + sup3 [Div S iexcl S0] gt 0 (710)
places implicit restrictions on the dissipation generated by the density evolution Dt raquo 0
through the mass degux R and the mass source R0 This amount of dissipation hasat least to be compensated by an appropriate constitutive assumption for the extraexternal entropy input s
0 through the extra entropy degux S and the extra entropysource S0 eg
S = [n iexcl 1] ordf1sup3
R S0 = iexcl [n iexcl 1] ordf1sup3
R0 (711)
Similar to the context of chemomechanics the degux r or R is usually related to thespatial or material gradient of the density rx raquo 0 or rX raquo 0 as
r = R0b cent rx raquo 0 R = rtB cent rX raquo 0 (712)
in analogy to Fickrsquos law for concentrations Here R0 and rt denote the mass-conduction coeplusmncient introducing either a materially or a spatially isotropicresponse In the context of biomechanics we typically macrnd variations of the con-stitutive equation
R0 =middot
raquo 0
raquo curren0
cediliexclm
ordf 0 iexcl ordf curren0 (713)
for the mass source R0 where raquo curren0 and ordf curren
0 denote the reference density and the refer-ence free energy respectively while m is an additional exponent that is commonlychosen to m gt n (see Harrigan amp Hamilton 1993) Finally the evaluation of theFourier inequality (613)2 as sup1d con
0 = iexcl sup1Q cent rX ln sup3 gt 0 suggests the demacrnition of themass-specimacrc non-mechanical energy degux sup1q or sup1Q according to Fourierrsquos law as
sup1q = iexcl K0b cent rx sup3 sup1Q = iexcl ktB cent rX sup3 (714)
with K0 and kt denoting the materially or spatially isotropic conductivity In order toa priori guarantee the satisfaction of the Fourier inequality (613)2 the conductivityis required to be non-negative K0 gt 0 and kt gt 0
8 Conclusion
We have presented a general framework for the thermodynamics of open systemsThe derived macreld equations are believed to be particularly useful in biomechanicalor chemomechanical applications where attention is conmacrned to one individual sub-system of the overall matter present Due to the fact that this open subsystem isallowed to constantly gain or lose mass the balance of mass had to be enhancedby additional surface and volume terms redegecting the interaction with the `outsideworldrsquo Since the newly created mass carries a particular amount of momentum
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2567
energy and entropy all the other balance equations had to be reformulated as wellTo clarify the indeguence of the changes in mass we have introduced the notions of`volume-specimacrcrsquo and `mass-specimacrcrsquo formats The former accounts for the total indegu-ence of the changes in mass through explicit mass-dependent and additional implicitopen-system contributions The latter however is free from all the mass-dependentextra terms and thus takes the familiar structure known from classical continuumthermodynamics The mass-specimacrc format is believed to be particularly useful sinceit parallels the framework of the closed-system case Consequently permissible con-stitutive relations can be derived from the mass-specimacrc version of the dissipationinequality The underlying procedure has been illustrated for the model problem ofthermo-hyperelasticity
References
Bowen R M 1976 Theory of mixtures In Continuum physics vol III Mixtures and EM macreldtheories (ed A C Eringen) pp 1127 Academic
Carter D R amp Hayes W C 1977 The behavior of bone as a two-phase porous structure JBone Joint Surg Am 59 785794
Coleman B D amp Noll W 1963 The thermodynamics of elastic materials with heat conductionand viscosity Arch Ration Mech Analysis 13 167178
Cowin S C amp Hegedus D H 1976 Bone remodelling I Theory of adaptive elasticity JElastic 6 313326
Cowin S C amp Humphrey J D 2001 Cardiovascular soft tissue mechanics Dordrecht Kluwer
de Boer R 2000 Theory of porous media Springer
Diebels S 2000 Mikropolare Zweiphasenmodelle Formulierung auf der Basis der TheoriePoroser Medien Habilitationsschrift Bericht aus dem Institut fur Mechanik (Bauwesen)Nr II-4 Universitat Stuttgart
Ehlers W 2002 Foundations of multiphasic and porous materials In Porous media theoryexperiments and numerical applications (ed W Ehlers amp J Bluhm) pp 386 Springer
Epstein M amp Maugin G A 2000 Thermomechanics of volumetric growth in uniform bodiesInt J Plasticity 16 951978
Gibson L J amp Ashby M F 1997 The mechanics of three-dimensional cellular materials ProcR Soc Lond A 382 4359
Goldstein H 1950 Classical mechanics Addison-Wesley
Harrigan T P amp Hamilton J J 1993 Finite element simulation of adaptive bone remodellinga stability criterion and a time-stepping method Int J Numer Meth Engng 36 837854
Haupt P 2000 Continuum mechanics and theory of materials Springer
Humphrey J D 2002 Cardiovasular solid mechanics Springer
Humphrey J D amp Rajagopal K R 2002 A constrained mixture model for growth and remod-eling of soft tissues Math Models Meth Appl Sci 12 407430
Liu I S 1972 Method of Lagrange multipliers for exploitation of the entropy principle ArchRation Mech Analysis 46 131148
Liu I S 2002 Continuum mechanics Springer
Malvern L E 1969 Introduction to the mechanics of a continuous medium Englewood Clireg sNJ Prentice Hall
Maugin G A 1993 Material inhomogenities in elasticity London Chapman amp Hall
Maugin G A 1999 The thermomechanics of nonlinear irreversible behaviors World Scientimacrc
Muller I 1973 Thermodynamik die Grundlagen der Materialtheorie Dusseldorf BertelsmannUniversitatsverlag
Proc R Soc Lond A (2003)
2568 E Kuhl and P Steinmann
Muller I 1994 Grundzuge der Thermodynamik Springer
Runesson K 1978 On nonlinear consolidation of soft clay PhD thesis Department of StructuralMechanics Chalmers University of Technology Goteborg Sweden
Schrodinger E 1944 What is life Cambridge University Press
Taber L A 1995 Biomechanics of growth remodeling and morphogenesis Appl Mech Rev48 487545
Truesdell C amp Toupin R 1960 The classical macreld theories In Handbuch der Physik (edS Flugge) vol 3 Springer
Wu T Hutter K amp Svendsen B 1998 On shear deg ow of a saturated icesediment mixture withthermodynamic equilibrium pressure and momentum exchange Proc R Soc Lond A 4547188
Proc R Soc Lond A (2003)

2552 E Kuhl and P Steinmann
no longer valid for open systems like the ones considered here In abstract terms thelocal balance of mass of open systems states that the rate of change of the materialor spatial density raquo 0 or raquo t is equal to the sum of the divergence of the related massdegux R or r and the mass source R0 or Rt (see macrgure 2) Note that most existingtheories for open systems except for the one developed by Epstein amp Maugin (2000)a priori exclude the in- or outdegux of mass as R = 0 and r = 0 The leaching of port-landite or the progressive decalcimacrcation of the calcium silicate hydrates in concretefurnish typical examples of an outdegux of mass in chemomechanical applications Cellmigration is another example of a mass degux typically encountered in biomechanicalproblems In principle it always is possible to express any degux term R or r throughan equivalent source term of the form Div R or div r according to the `equivalence ofsurface and volume sourcesrsquo as stated by Truesdell amp Toupin (1960 x 157) Howeverwe shall allow for independent degux terms in the following to keep the underlyingtheory as general as possible Consequently the material version of the balance ofmass can be stated as
Dt raquo 0 = Div R + R0 (31)
The individual terms in the above equation can be pushed forward with the help ofthe standard Piola transforms
raquo 0 = J raquo t R0 = JRt R = Jr cent F iexclt (32)
Note that in classical continuum mechanics with R = 0 and R0 = 0 equa-tion (32)1 is usually referred to as the `material continuity equationrsquo The applicationof Reynoldsrsquos transport theorem (211)
jDt raquo 0 = dt raquo t + div( raquo tv) (33)
introduces the spatial version of the balance of mass
dt raquo t + div( raquo tv) = div r + Rt (34)
Equation (34) which was introduced as the `spatial continuity equationrsquo by Euler in1757 represents one of the basic equations in classical deguid mechanics in the contextof closed systems with r = 0 and Rt = 0 In the following we shall distinguishbetween the material and the spatial version of the balance of mass given in theform
Dt raquo 0 = Div R + R0 dt raquo t + div( raquo tv) = div r + Rt (35)
Remark 31 (volume- and mass-specimacrc formats) In the present theorythe balance of mass plays a central role since it can essentially be used to transformthe volume-specimacrc version of any other balance law to its mass-specimacrc counterpartIn the volume-specimacrc format the quantity to be balanced can either be given withmaterial or spatial reference as fdegg0 = raquo 0fdegg or fdeggt = raquo tfdegg It is balanced withthe sum of the divergence of the corresponding deguxes fcurreng and fsectg and the volumesources fmacrg0 and fmacrgt
Dtfdegg0 = Divfcurreng + fmacrg0 dtfdeggt + div(fdeggt laquo v) = divfsectg + fmacrgt (36)
The material and spatial versions of a balance law (36)1 and (36)2 respectivelyare related through the corresponding Piola transforms fdegg0 = Jfdeggt fmacrg0 = Jfmacrgt
and fcurreng = Jfsectg cent F iexclt in combination with Reynoldsrsquos transport theorem (211)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2553
rsquo
F J DtF
B0 Bt
p0
brvbar t
b0
pt
frac14 t
bt
Figure 3 Balance of momentum momentum densities deg uxes and sources
Note that the deguxes fcurreng and fsectg can be expressed in terms of the reduced deguxterms f sup1curreng and fsup1sectg in the form
fcurreng = fsup1curreng + fdegg laquo R fsectg = fsup1sectg + fdegg laquo r (37)
Correspondingly the volume-specimacrc source terms are demacrned in terms of the reducedsource terms fsup1g0 and fsup1gt
fmacrg0 = fsup1g0 + fdeggR0 iexcl rXfdegg cent R fmacrgt = fsup1gt + fdeggRt iexcl rxfdegg cent r (38)
Each balance law can thus be transformed into a mass-specimacrc version balancingthe rate of change of the mass-specimacrc quantity fdegg = fdegg0=raquo 0 or fdegg = fdeggt=raquo t withthe corresponding reduced degux f sup1curreng and fsup1sectg and the reduced source terms fsup1g0
and fsup1gt The mass-specimacrc balance equations can be derived by subtracting fdeggtimes the balance of mass (35) from the corresponding volume-specimacrc version (36)Consequently we obtain remarkably simple generic forms of the mass-specimacrc balancelaws
raquo 0 Dtfdegg = Divfsup1curreng + fsup1g0 raquo t dtfdegg + raquo tv cent rxfdegg = divfsup1sectg + fsup1gt (39)
which are related through the Piola transforms fdegg0 = Jfdeggt fsup1g0 = Jfsup1gt andf sup1curreng = Jfsup1sectg cent F iexclt and the Euler theorem (24) Note that the mass-specimacrc formatis free from all the explicit extra terms caused by the changes in mass Howeverthis is not the case in the formulation developed by Epstein amp Maugin (2000) wherethe gradient terms rXfdegg cent R and rxfdegg cent r are part of the mass-specimacrc balanceequation (39)
4 Balance of momentum
Bearing in mind the derivation of the generic balance laws of the preceding sectionwe now elaborate their specimacrcation to yield the balance of linear momentum It willturn out that the balance of angular momentum and the balance of kinetic energy canbe interpreted as particular weighted versions of the balance of linear momentum
(a) Volume-specimacrc version
The balance of momentum represents one of the `laws of classical mechanicsrsquo Forclosed systems it was macrrst specimacred by Euler in 1776 It states that in an inertialframe the reaction of any body is equal to the load acting upon it Therein thereaction is characterized through the volume-specimacrc momentum density p0 or pt
Proc R Soc Lond A (2003)
2554 E Kuhl and P Steinmann
canonically demacrned as a spatial covector given through the partial derivative of thevolume-specimacrc kinetic-energy density K0 or Kt
K0 = 12raquo 0v cent v Kt = 1
2raquo tv cent v (41)
with respect to the spatial velocity v
p0 = v K0 = raquo 0v pt = v Kt = raquo tv (42)
The load can essentially be divided into two types namely the contact or surfaceforces represented by the momentum deguxes brvbar t and frac14 t and the at-a-distance forcesie the momentum sources b0 and bt (see macrgure 3) Consequently the material versionof the volume-specimacrc balance of momentum sometimes also referred to as `Cauchyrsquosmacrrst law of motionrsquo can be expressed as
Dtp0 = Div brvbar t + b0 (43)
In honour of the work of Piola in 1833 and Kirchhoreg in 1852 the momentum degux brvbar t
is typically referred to as the macrrst PiolaKirchhoreg stress tensor in classical continuummechanics With the help of the well-known Piola transforms
p0 = Jpt b0 = Jbt brvbar t = J frac14 t cent F iexclt (44)
the individual terms of equation (43) can be pushed forward to the spatial conmacrgu-ration The corresponding momentum degux frac14 t is commonly denoted as the Cauchystress tensor in standard continuum mechanics commemorating the early work ofCauchy in 1823 The application of Reynoldsrsquos transport theorem (211)
jDtp0 = dtpt + div(pt laquo v) (45)
yields the spatial version of the balance of momentum
dtpt + div(pt laquo v) = div frac14 t + bt (46)
which is typically applied in classical deguid mechanics The overall degux term frac14 t iexclpt laquo v redegects the convective nature of the above equation through the transport oflinear momentum pt laquo v In summary we distinguish between the material and thespatial version of the volume-specimacrc balance of momentum
Dtp0 = Div brvbar t + b0 dtpt + div(pt laquo v) = div frac14 t + bt (47)
On the Neumann boundary characterized through the material and spatial normalN and n the normal projections of the momentum deguxes of PiolaKirchhoreg andCauchy type brvbar t and frac14 t are required to be in equilibrium with the correspondingclosed- and open-system stress-vector contributions tclos ed
0 or tclos edt and top en
0 ortop en
t respectively
brvbar t cent N = tclos ed0 + t op en
0 top en0 = sup1t op en
0 + [p laquo R] cent N
frac14 t cent n = tclos edt + t op en
t top ent = sup1t op en
t + [p laquo r] cent n
)
(48)
Correspondingly the momentum sources terms b0 and bt can be understood as thesum of the closed- and the open-system volumeforce contributions bclos ed
0 or bclos edt
and bop en0 or bop en
t
b0 = bclos ed0 + bop en
0 bop en0 = sup1bop en
0 + pR0 iexcl rXp cent R
bt = bclos edt + bop en
t bop ent = sup1bop en
t + pRt iexcl rxp cent r
)
(49)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2555
While the expressions in terms of R r R0 and Rt take into account the part ofthe newly created or indegowing mass that carries the same amount of mass-specimacrcmomentum p as the original substrate the additional terms sup1t op en
0 sup1t op ent sup1b op en
0 andsup1b op en
t account for a possible diregerence in the momentum density
Remark 41 (balance of angular momentum) The volume-specimacrc angular-momentum density l0 or lt is demacrned through the vector product of the correspondinglinear momentum density p0 or pt with a distance vector a = rsquo iexcl rsquo0 from a macrxedpoint rsquo0 in space
l0 = a pound p0 lt = a pound pt (410)
In the absence of distributed couples and internal rotational degrees of freedom thevolume-specimacrc balance of angular momentum for open systems can be derived bytaking the vector product of the volume-specimacrc momentum balance (47) with thedistance vector a
a pound Dtp0 = a pound Div brvbar t + a pound b0 (411)
With the demacrnition of the angular momentum (410) the above equation can berewritten as
Dtl0 = Div(a pound brvbar t) + a pound b0 iexcl F pound brvbar t (412)
Thereby the vector product of the two second-order tensors iexcl F pound brvbar t can beexpressed in terms of the axial vector of the related second-order tensor [F cent brvbar ]axlas iexcl F pound brvbar t = 2[F cent brvbar ]axl It proves convenient for later purposes to reformulate theabove statement in terms of the reduced momentum degux sup1brvbar t = brvbar t iexcl p laquo R andthe reduced momentum source sup1b0 = b0 iexcl pR0 + rXp cent R
Dtl0 = Div(a pound [ sup1brvbar t +p laquoR])+a pound [sup1b0 +pR0 iexcl rXp cent R] iexcl F pound [ sup1brvbar t +plaquoR] (413)
Herein the third term on the right-hand side
iexcl F pound [ sup1brvbar t + p laquo R] = 2[F cent [ sup1brvbar + R laquo p]]axl
represents the volume-specimacrc production of the angular momentum l0 Anticipatinglater considerations we would like to point out that assuming the symmetry of thereduced momentum degux F cent sup1brvbar = sup1brvbar t cent F t or equivalently sup1frac14 = sup1frac14 t the production ofangular momentum reduces to 2[F cent [R laquo p]]axl or 2[r laquo p]axl respectively
Remark 42 (balance of kinetic energy) Although the balance of kineticenergy does not constitute an independent balance law it proves signimacrcant to takea closer look at it since it will help to introduce work conjugate stress and strainmeasures Moreover the balance of kinetic energy will be used to identify the externaland internal mechanical power which are essential for our further thermodynamicalconsiderations The starting point is the material time derivative of the volume-specimacrc kinetic-energy density K0 = 1
2raquo 0v cent v
DtK0 = raquo 0 DtK + K Dt raquo 0 = p0 cent Dtv + K Dt raquo 0 = v cent Dtp0 iexcl K Dt raquo 0 (414)
With the projection of the volume-specimacrc balance of momentum (43) with the spa-tial velocity v and the balance of mass (35)1 weighted by the mass-specimacrc kinetic-energy density K
v cent Dtp0 = Div(v cent brvbar t) + v cent b0 iexcl rXv brvbar t
KDt raquo 0 = Div(KR) + KR0 iexcl rXK cent R
)
(415)
Proc R Soc Lond A (2003)
2556 E Kuhl and P Steinmann
equation (414) can be rewritten in the explicit form
DtK0 = Div(v cent brvbar t iexcl KR) + v cent b0 iexcl KR0 + rXK cent R iexcl brvbar t DtF (416)
In what follows it will prove convenient to reformulate the above equation in terms ofthe reduced momentum degux sup1brvbar t = brvbar t iexcl p laquo R and the reduced momentum sourcesup1b0 = b0 iexcl pR0 + rXp cent R which can be related to their overall counterparts brvbar t andb0 through the following identities
Div(v cent brvbar t) = Div(v cent sup1brvbar t) + Div(2KR)
v cent b0 = v cent sup1b0 + 2KR0 iexcl v cent rXp cent R
brvbar t DtF = sup1brvbar t DtF + p cent rXv cent R
9gtgt=
gtgt(417)
With the help of the above equations and the identity v cent rX p + p cent rXv = 2rXKfollowing from v cent p = 2K equation (416) can be reformulated in the following way
DtK0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R iexcl sup1brvbar t DtF (418)
As stated by Stokes in 1857 the rate of change of the kinetic energy is equal to theexternal mechanical power minus the internal mechanical power Consequently theright-hand side of the above equation enables the identimacrcation of the volume-specimacrcexternal and internal mechanical power pext
0 and pin t0
pext0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R
pin t0 = sup1brvbar t DtF
)(419)
whereby pext0 characterizes the total rate of working of mechanical actions on the
body This rate of working consists of the degux contribution v cent sup1brvbar t + KR and thesource term v cent sup1b0 + KR0 iexcl rXK cent R The internal mechanical power pin t
0 consistsexclusively of the production term for the kinetic energy as sup1brvbar t DtF The demacrnitionof the latter suggests the interpretation of the reduced momentum degux sup1brvbar t and thematerial time derivative of the deformation gradient DtF as work conjugate pairsWith the above abbreviations at hand the balance of kinetic energy can be rewrittenin a form which has been denoted as the local form the `theorem of energyrsquo by Maugin(1993)
DtK0 = pext0 iexcl pin t
0 dtKt + div(Ktv) = pextt iexcl pin t
t (420)
The spatial version of the balance of kinetic energy (420)2 follows naturally byapplying the appropriate Piola transforms K0 = JKt
pext0 = Jpext
t and pin t0 = Jpin t
t along with Reynoldsrsquos transport theorem (211)
(b) Mass-specimacrc version
The mass-specimacrc version of the balance of momentum is based on the mass-specimacrckinetic-energy density
K = 12v cent v (421)
demacrning the quantity to be balanced as its partial derivative with respect to thespatial velocity v
p = v K = v (422)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2557
The rate of change of the mass-specimacrc momentum density p ie the covariant spatialvelocity is balanced with the reduced momentum deguxes sup1brvbar t or sup1frac14 t and the reducedmomentum sources sup1b0 or sup1bt By subtracting the balance of mass (35) weighted bythe momentum density p from the volume-specimacrc momentum balance (47) we canderive the diregerent versions of the mass-specimacrc momentum balance
raquo 0Dtp = Div sup1brvbar t + sup1b0 raquo t dtp + raquo tv cent rxp = div sup1frac14 t + sup1bt (423)
The reduced momentum deguxes sup1brvbar t and sup1frac14 t which are related to the overall momen-tum deguxes brvbar t and frac14 t through sup1brvbar t = brvbar t iexcl p laquo R and sup1frac14 t = frac14 t iexcl p laquo r are deter-mined by the closed- and open-system stress-vector contributions tclos ed
0 and sup1t op en0
or tclos edt and sup1t op en
t respectively on the Neumann boundary
sup1brvbar t cent N = tclos ed0 + sup1t op en
0
sup1frac14 t cent n = tclos edt + sup1t op en
t
)(424)
while the reduced momentum sources sup1b0 and sup1bt are given as the sum of the classicalclosed-system volume force contributions bclos ed
0 or bclos edt and the reduced open-
system contributions sup1b op en0 or sup1b op en
t
sup1b0 = bclos ed0 + sup1bop en
0
sup1bt = bclos edt + sup1bop en
t
)(425)
Note that the mass-specimacrc momentum balance (423) is free from all the explicitextra terms caused by the changes in mass The indeguence of the open system mani-fests itself only implicitly through the prescribed boundary terms sup1t op en
0 and sup1t op ent and
the prescribed volume sources sup1b op en0 and sup1b op en
t The convective indeguence introducedthrough the raquo tv cent rxp term however is also present in the closed-system case
Remark 43 (balance of angular momentum) The mass-specimacrc angular-momentum density l is given as the vector product of the mass-specimacrc momentumdensity p with the distance vector a = rsquo iexcl rsquo0
l = a pound p (426)
Consequently the mass-specimacrc version of the balance of angular momentum followsfrom the vector product of the mass-specimacrc momentum balance (423) with thedistance vector a
a pound raquo 0Dtp = a pound Div sup1brvbar t + a pound sup1b0 (427)
By making use of the demacrnition (426) the above equation can be rewritten as
raquo 0Dtl = Div(a pound sup1brvbar t) + a pound sup1b0 iexcl F pound sup1brvbar t (428)
Again the third term on the right-hand side iexcl F pound sup1brvbar t = 2[F cent sup1brvbar ]axl representsthe production of the mass-specimacrc angular momentum l If we require the balanceof angular momentum to represent an individual independent statement
raquo 0Dtl = Div(a pound sup1brvbar t) + a pound sup1b0 (429)
this production term has to vanish identically This condition thus reveals the sym-metry requirements
F cent sup1brvbar = sup1brvbar t cent F t sup1frac14 = sup1frac14 t (430)
Proc R Soc Lond A (2003)
2558 E Kuhl and P Steinmann
The material and the spatial versions (430)1 and (430)2 respectively are relatedthrough the corresponding Piola transform sup1brvbar t = J sup1frac14 t cent F iexclt A comparison of thevolume-specimacrc statement (413) with its mass-specimacrc counterpart (429) indicatesthat the in- or outdegux of mass R or r produces an additional amount of angularmomentum unless
F cent R laquo p = p laquo R cent F t r laquo p = p laquo r (431)
ie the mass degux F centR or r is constitutively demacrned to be coaxial to the mass-specimacrcmomentum density p
Remark 44 (balance of kinetic energy) To investigate the mass-specimacrc ver-sion of the balance of kinetic energy we need to evaluate the material time derivativeof the mass-specimacrc kinetic-energy density K = 1
2v centv which can easily be derived by
subtracting the weighted balance of mass (415)2 from the material time derivativeof the volume-specimacrc kinetic-energy density K0 given in equation (418) as
raquo 0 DtK = DtK0 iexcl K Dt raquo 0 (432)
and thusraquo 0 DtK = Div(v cent sup1brvbar t) + v cent sup1bext
0 iexcl sup1brvbar t DtF (433)
Consequently we can identify the mass-specimacrc external and internal mechanicalpower sup1pext
0 and sup1pin t0 respectively
sup1pext0 = pext
0 iexcl KDt raquo 0 = Div(v cent sup1brvbar t) + v cent sup1b0
sup1pin t0 = pin t
0 = sup1brvbar t DtF
)(434)
It is worth noting that the diregerence of the mass- and volume-specimacrc formu-lation manifests itself only in the demacrnition of the external mechanical powersup1pext
0 = pext0 iexcl KDt raquo 0 while the mass-specimacrc internal power is identical to its volume-
specimacrc counterpart as sup1pin t0 = pin t
0 Consequently the material and the spatial versionof the mass-specimacrc balance of kinetic energy take the formats
raquo 0 DtK = sup1pext0 iexcl sup1pin t
0 raquo t dtK + raquo tv cent rxK = sup1pextt iexcl sup1pin t
t (435)
whereby both formulations are related through the corresponding Piola transformswith sup1pext
0 = J sup1pextt and sup1pin t
0 = Jsup1pin tt and the Euler theorem (24)
5 Balance of energy
The balance of total energy as a representation of the macrrst law of thermodynamicsbalances the rate of change of the volume-specimacrc total energy density E0 or Et asthe sum of the kinetic and internal energy density E0 = K0 + I0 or Et = Kt + It
with the external power In classical continuum mechanics of closed systems thisexternal power is composed of a purely mechanical contribution pext
0 or pextt and a
non-mechanical thermal contribution qext0 or qext
t Therefore the balance of energy issometimes referred to as the `principle of interconvertibility of heat and mechanicalworkrsquo a notion which was known to Carnot in 1832 and experimentally verimacredby Joule in 1843 However when dealing with open systems we have to generalizethe demacrnition of the non-mechanical external power by including additional externalopen-system contributions in the demacrnition of qext
0 and qextt (cf Malvern 1969 x 54)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2559
rsquo
F J DtF
B0 Bt
E0
v cent brvbar t Q
v cent b0 Q0
Et
v cent frac14 t q
v cent bt Qt
Figure 4 Balance of energy energy densities deg uxes and sources
(a) Volume-specimacrc version
For the spatial-motion problem the rate of change of the volume-specimacrc totalenergy density E0 = raquo 0E can be expressed in the form (cf macrgure 4)
DtE0 = Div(v cent sup1brvbar t iexcl sup1Q + ER) + v cent sup1b0 + sup1Q0 + ER0 iexcl rXE cent R (51)
Thereby in addition to the purely mechanical external power pext0 demacrned in equa-
tion (419) we have included the non-mechanical external power qext0 accounting
for the classical thermal eregects of the closed system and the additional open-systemeregects as an additional non-mechanical supply of energy
qext0 = Div( iexcl Q) + Q0 (52)
Similar to the mechanical power the non-mechanical power consists of a degux and asource contribution denoted by Q and Q0 respectively The former is composed ofthe reduced outward non-mechanical energy degux sup1Q modimacred by the explicit extradegux due to the open system IR while the latter is the sum of the reduced non-mechanical energy source sup1Q0 enhanced by the explicit eregects of the open systemIR0 and rXI cent R
pext0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R
qext0 = Div( iexcl sup1Q + IR) + sup1Q0 + IR0 iexcl rXI cent R
)
(53)
Equation (51) can thus be reformulated in the concise form
DtE0 = pext0 + qext
0 dtEt + div(Etv) = pextt + qext
t (54)
which for the classical closed-system case dates back to the early works of Duhem in1892 Again the spatial version (54)2 follows from the appropriate Piola transformsE0 = JEt
pext0 = Jpext
t qext0 = Jqext
t Q = Jq cent F iexclt and sup1Q = J sup1q cent F iexclt along withReynoldsrsquos transport theorem (211) The demacrnition of the non-mechanical energydeguxes Q and q parallels the introduction of the macrrst PiolaKirchhoreg stress tensorbrvbar and the Cauchy stress frac14 On the Neumann boundary the non-mechanical energydeguxes Q and q are given in terms of the normal projection of the classical heat deguxdensities qclos ed
0 and qclos edt and the additional open-system contributions qop en
0 andqop en
t Q cent N = qclos ed
0 + qop en0 qop en
0 = sup1q op en0 iexcl IR cent N
q cent n = qclos edt + qop en
t qop ent = sup1q op en
t iexcl Ir cent n
)(55)
Proc R Soc Lond A (2003)
2560 E Kuhl and P Steinmann
Moreover the non-mechanical energy sources Q0 and Qt can be understood as thesum of the classical heat source Qclos ed
0 and Qclos edt and an additional non-mechanical
energy source taking into account the nature of the open system Qop en0 and Qop en
t
Q0 = Qclos ed0 + Qop en
0 Qop en0 = sup1Qop en
0 + IR0 iexcl rXI cent R
Qt = Qclos edt + Qop en
t Qop ent = sup1Qop en
t + IRt iexcl rxI cent r
)(56)
In formal analogy to the demacrnition of the momentum quantities the expressions interms of R r R0 and Rt take into account the part of the newly added mass thatcarries the same amount of non-mechanical energy as the original substrate while theadditional open-system terms sup1q op en
0 sup1q op ent sup1Qop en
0 and sup1Qop ent account for a possible
diregerence in non-mechanical energy
Remark 51 (balance of internal energy) For further thermodynamical con-siderations it proves convenient to consider the volume-specimacrc internal energy den-sity I0 = E0 iexcl K0 or It = Et iexcl Kt given as the diregerence of the corresponding totalenergy density and the kinetic-energy density Consequently the two versions of thebalance of internal energy follow from subtracting the balance of kinetic energy (420)from the total energy balance (54)
DtI0 = pin t0 + qext
0 dtIt + div(Itv) = pin tt + qext
t (57)
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the equations derived above balances the mass-specimacrc energy density E = E0=raquo 0 with the mass-specimacrc external mechanical powersup1pext
0 introduced in (434) and the mass-specimacrc non-mechanical power sup1qext0 as
sup1qext0 = qext
0 iexcl IDt raquo 0 = iexcl Div sup1Q + sup1Q0 (58)
The corresponding balance equations
raquo 0 DtE = sup1pext0 + sup1qext
0 raquo t dtE + raquo tv cent rxE = sup1pextt + sup1qext
t (59)
follow from subtracting the corresponding balance of mass (35) weighted by the totalenergy E from the volume-specimacrc energy balance (54) The spatial version (59)2can be derived by applying the corresponding Piola transforms with sup1pext
0 = Jsup1pextt and
sup1qext0 = J sup1qext
t and the Euler theorem (24) Again we can relate the reduced energydeguxes sup1Q and sup1q demacrned through sup1Q = Q iexcl IR and sup1q = q iexcl Ir to the classical heatdegux qclos ed
0 or qclos edt and the energy degux caused by additional eregects of the open
system sup1q op en0 and sup1q op en
t
sup1Q cent N = qclos ed0 + sup1q op en
0
sup1q cent n = qclos edt + sup1q op en
t
)(510)
Moreover the reduced non-mechanical energy sources sup1Q0 and sup1Qt are given as the sumof the classical heat source of a closed system Qclos ed
0 and Qclos edt and the additional
open-system contribution to the energy sup1Qop en0 and sup1Qop en
t
sup1Q0 = Qclos ed0 + sup1Qop en
0
sup1Qt = Qclos edt + sup1Qop en
t
)(511)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2561
Again as opposed to the formulation developed by Epstein amp Maugin (2000) themass-specimacrc format is free from all the explicit extra terms caused by changes inmass and thus resembles the balance of energy known from classical mechanics
Remark 52 (balance of internal energy) A reduction to the balance ofinternal energy I = E iexcl K follows from subtracting the balance of kinetic energy(435) from the balance of total energy (59)
raquo 0 DtI = sup1pin t0 + sup1qext
0 raquo t dtI + raquo tv cent rxI = sup1pin tt + sup1qext
t (512)
6 Balance of entropy
The macrrst law of thermodynamics in the form of the balance of energy expressesthe interconvertibility of heat and work However the balance of energy itself doesnot place any restrictions on the direction of the thermodynamical process Thesecond law of thermodynamics the balance of entropy postulates the existence ofan absolute temperature and of a specimacrc entropy as a state function Through theinternal production of the latter which is required to either vanish for reversibleprocesses or be strictly positive for irreversible processes a direction is imposedon the thermodynamical process Recall that when dealing with open systems amacrxed material volume B0 is allowed to constantly gain or lose mass Open systemsnaturally exhibit an additional entropy degux and entropy source caused by the addedmass as pointed out earlier in the famous monograph by Schrodinger (1944 x 6) aswell as by Malvern (1969 x 56) or also recently by Epstein amp Maugin (2000) Theindeguence of changes in mass on the entropy is twofold On the one hand it is redegectedthrough the explicit open-system entropy degux SR and the related source terms SR0
and iexcl rXS cent R On the other hand we will introduce the reduced entropy degux andsource sup1H and sup1H0 respectively which in turn split into the extra non-mechanicalenergy terms sup1Q and sup1Q0 divided by the absolute temperature sup3 and an extra entropydegux and source S and S0 While the former parallel the introduction of the entropydegux and source in classical closed-system thermodynamics the contributions S andS0 account for the diregerence in entropy of the added mass and the original substrate
Remark 61 (balance of entropy versus entropy inequality) In the relatedliterature the entropy is often introduced through the entropy inequality For thesake of analogy we will treat the entropy as a balance quantity in the followingIts evolution is thus balanced with the sum of the external and internal entropyproduction whereby the latter is constrained to be non-negative throughout In thecase of closed-system thermodynamics this approach has been followed for exampleby Truesdell amp Toupin (1960 xx 256 and 257) Haupt (2000 x 33) or Liu (2002 x 5)
(a) Volume-specimacrc version
The balance of entropy balances the volume-specimacrc entropy density S0 = raquo 0S withthe external entropy input hext
0 and the internal entropy production hin t0 Thereby
the former consists of the entropy degux H across the material surface B0 and theentropy source H0 in the material domain B0 (cf macrgure 5)
hext0 = Div( iexcl H ) + H0 (61)
Proc R Soc Lond A (2003)
2562 E Kuhl and P Steinmann
rsquo
F J DtF
B0 Bt
S0
H S
H0 S0
St
h s
Ht St
Figure 5 Balance of entropy entropy densities deg uxes and sources
The external entropy degux H is introduced as the sum of the reduced external entropydegux sup1H enhanced by the explicit open-system contribution SR Accordingly theexternal entropy source H0 consists of the reduced entropy source sup1H0 modimacred byadditional terms SR0 and iexcl rXS cent R accounting for the explicit open-system con-tribution to the entropy supply
hext0 = Div( iexcl sup1H + SR) + sup1H0 + SR0 iexcl rXS cent R
hin t0 gt 0
)(62)
Just like in classical thermodynamics of closed systems the internal entropy produc-tion hin t
0 is required to be point-wise non-negative The balance of entropy can thusbe expressed in the following form
DtS0 = hext0 + hin t
0 dtSt + div(Stv) = hextt + hin t
t (63)
Again the material and the spatial version are related through the correspond-ing Piola transforms S0 = JSt
hext0 = Jhext
t hin t0 = Jhin t
t H = Jh cent F iexclt andsup1H = J sup1h cent F iexclt in combination with Reynoldsrsquos transport theorem Note that alter-
natively the balance of entropy which is primarily nothing but a formal demacrnitionof the entropy production can be recast into the inequality DtS0 iexcl hext
0 gt 0 Thiscondition which is typically referred to as `postulate of irreversibilityrsquo in classicalthermodynamics (see Truesdell amp Toupin 1960 x 258) induces a direction to thethermodynamic process Next we will introduce Neumann boundary conditions forthe spatial-motion Kirchhoreg and Cauchy type entropy degux H and h in terms of theclassical closed-system entropy degux contribution hclos ed
0 or hclos edt and the additional
open-system contribution hop en0 or hop en
t
H cent N = hclos ed0 + hop en
0 hop en0 = sup1hop en
0 iexcl SR cent N
h cent n = hclos edt + hop en
t hop ent = sup1hop en
t iexcl Sr cent n
)
(64)
Accordingly the entropy sources H0 and Ht are introduced as the sum of the classicalentropy source of the closed system Hclos ed
0 or Hclos edt and the additional entropy
source accounting for the nature of the open system Hop en0 or Hop en
t
H0 = Hclos ed0 + Hop en
0 Hop en0 = sup1Hop en
0 + SR0 iexcl rXS cent R
Ht = Hclos edt + Hop en
t Hop ent = sup1Hop en
t + SRt iexcl rxS cent r
)
(65)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2563
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the above equations states that the rate of changeof the mass-specimacrc entropy S = S0=raquo 0 is in equilibrium with the mass-specimacrcexternal entropy input sup1hext
0 and the mass-specimacrc internal entropy production sup1hin t0
which are introduced in the following way
sup1hext0 = hext
0 iexcl SDt raquo 0 = iexcl Div sup1H + sup1H0
sup1hin t0 = hin t
0 gt 0
)
(66)
The resulting material and spatial version of the balance of entropy
raquo 0 DtS = sup1hext0 + sup1hin t
0 raquo t dtS + raquo tv cent rxS = sup1hextt + sup1hin t
t (67)
which can be derived by subtracting S times the balance of mass (35) from thevolume-specimacrc balance of entropy (63) are related via the appropriate Piola trans-forms sup1hext
0 = Jsup1hextt and sup1hin t
0 = Jsup1hin tt and the Euler theorem (24) Moreover we can
relate the reduced entropy deguxes sup1H and sup1h demacrned through sup1H = H iexcl SR andsup1h = h iexcl Sr to the classical entropy degux of the closed system hclos ed
0 or hclos edt and
the entropy degux caused by additional eregects of the open system sup1hop en0 or sup1hop en
t
sup1H cent N = hclos ed0 + sup1hop en
0
sup1h cent n = hclos edt + sup1hop en
t
)(68)
Accordingly the reduced entropy sources sup1H0 = H0 iexcl SR0 + rXS cent R and sup1Ht = Ht iexclSRt + rxS cent r are given as the sum of the classical closed-system entropy sourceHclos ed
0 or Hclos edt and the additional open-system contribution to the entropy source
sup1Hop en0 or sup1Hop en
t sup1H0 = Hclos ed
0 + sup1Hop en0
sup1Ht = Hclos edt + sup1Hop en
t
)
(69)
Remark 62 (dissipation inequality) For further elaboration it proves con-venient to set up relations between the reduced entropy degux sup1H and the reducednon-mechanical energy degux sup1Q and between the reduced entropy source sup1H0 and thereduced non-mechanical energy source sup1Q0 in terms of the absolute temperature sup3 an extra entropy degux S and an extra entropy source S0
sup1H =1sup3
sup1Q + S sup1H0 =1sup3
sup1Q0 + S0 (610)
The above equations can be understood as a generalization of the ideas of Cowinamp Hegedus (1976) who have suggested including the additional entropy source S0
accounting for changes in entropy caused by changes in mass that are not consideredimplicitly through the changes in energy sup1Q0 Both the additional entropy degux S andthe entropy source S0 which we shall summarize in the term s
0 = iexcl Div S + S0 inthe following have to be determined constitutively These additional terms can beunderstood as an explicit representation of the exchange of entropy with the `outsideworldrsquo We now turn to the evaluation of the above-stated second law of thermo-dynamics by recasting it into an appropriate form of the dissipation inequality astatement that places further restrictions on the form of the constitutive response
Proc R Soc Lond A (2003)
2564 E Kuhl and P Steinmann
functions For this purpose we shall interpret the internal entropy production sup1hin t0 as
a measure for the degree of irreversibility introducing the dissipation rate sup1d0 as the
internal entropy production weighted by the absolute temperature as sup1d0 = sup3 sup1hin t
0 gt 0With the help of the balance of entropy (67)1 the relations (610) and the bal-ance of internal energy (512)1 the dissipation rate can be reformulated to yield theClausiusDuhem inequality in an internal energy based fashion
sup1d0 = sup1pin t
0 iexcl raquo 0Dt[I iexcl sup3 S ] iexcl raquo 0S Dt sup3 iexcl s0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (611)
By making use of the appropriate LegendreFenchel transform introducing theHelmholtz free energy ordf = I iexcl sup3 S we end up with the classical free-energy-basedversion of the ClausiusDuhem inequality
sup1d0 = sup1brvbar t DtF iexcl raquo 0 Dt ordf iexcl raquo 0S Dt sup3 iexcl s
0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (612)
which is particularly useful when the temperature sup3 rather than the entropy S isused as the independent variable In classical thermodynamics the ClausiusDuheminequality (612) is typically decomposed into a local and a conductive contributionsup1d loc
0 and sup1dcon0
sup1d loc0 = sup1brvbar t DtF iexcl raquo 0Dt ordf iexcl raquo 0SDt sup3 iexcl s
0 sup3 gt 0 sup1d con0 = iexcl sup1Q cent rX ln sup3 gt 0 (613)
whereby the local term sup1d loc0 gt 0 represents the ClausiusPlanck inequality for open
systems while the remaining conductive term sup1dcon0 gt 0 is typically referred to as a
Fourier inequality As a suplusmncient condition for sup1d0 gt 0 both inequalities are required
to hold separately In what follows we shall apply the dissipation inequality (613) toderive constitutive equations for the reduced momentum degux sup1brvbar t and the entropy SIn addition the evaluation of the dissipation inequality places further restrictions onthe extra entropy exchange s
0 The underlying procedure will be highlighted in detailfor the simple model problem of thermo-hyperelasticity in the following section
Remark 63 Note that at this stage the introduction of the reduced entropydegux and source sup1H = sup1Q=sup3 + S and sup1H0 = sup1Q0=sup3 + S0 as introduced in equations(610) is a mere constitutive assumption Nevertheless for particular constitutive-model problems the postulated relations can be verimacred through the evaluation ofthe dissipation inequality according to Muller (1973) and Liu (1972) (see also Liu2002) It will turn out that in most cases equations (610) are justimacred with thetrivial solution S = 0 and S0 = 0 However assuming this result from the veryoutset might be too restrictive for complex constitutive models as also pointed outby Epstein amp Maugin (2000)
7 Thermo-hyperelasticity
We are now in a position to exploit the second law of thermodynamics in the formof the ClausiusDuhem inequality along the lines of Coleman amp Noll (1963) Thestraightforward evaluation of the local part of the dissipation inequality in the formof the ClausiusPlanck inequality (613)1 will result in the demacrnition of the reducedmomentum degux sup1brvbar and the mass-specimacrc entropy density S Its conductive sup-plement (613)2 the Fourier inequality suggests the demacrnition of the reduced non-mechanical energy degux sup1Q along the lines of the classical linear heat conduction intro-duced by Fourier in 1822 Finally the mass degux R will be introduced constitutively
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2565
in the context of classical linear mass diregusion according to Fickrsquos law Here wewill thus restrict ourselves to a thermo-hyperelastic-model problem for which all thedissipation is caused exclusively by heat conduction and possibly by an additionalopen-system contribution of the `outside worldrsquo In what follows we shall make useof the multiplicative decomposition of the free energy ordf 0
ordf 0 = raquo 0 ordf (71)
Thereby the mass-specimacrc free-energy density ordf is expressed in terms of the materialdensity raquo 0 the deformation gradient F and the absolute temperature sup3 with a pos-sible explicit dependence on the material placement X Within the thermodynamicsof open systems the material density raquo 0 is allowed to vary in space and time is thusintroduced as function of the material placement X and the time t
ordf = ordf ( raquo 0 F sup3 X) raquo 0 = raquo 0(X t) (72)
Consequently the material time derivative of the free-energy density is formally givenin the form
Dt ordf = D raquo 0ordf Dt raquo 0 + DF ordf DtF + D sup3 ordf Dt sup3 (73)
The evaluation of the ClausiusPlanck inequality (613)1
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 + [ sup1brvbar t iexcl raquo 0DF ordf ] DtF iexcl [ raquo 0S + raquo 0 D sup3 ordf ] Dt sup3 iexcl s0 sup3 gt 0 (74)
demacrnes the reduced macrrst PiolaKirchhoreg stress tensor sup1brvbar t and the mass-specimacrcentropy S as thermodynamically conjugate variables to the deformation gradientF and the absolute temperature sup3
sup1brvbar t = raquo 0 DF ordf S = iexcl D sup3 ordf (75)
As in Cowin amp Hegedus (1976) we are left with a reduced inequality of the form
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 iexcl s0 sup3 gt 0 (76)
In biomechanics the simplest choice for the free-energy function ordf for cellular mate-rials such as open-pored biological tissues is based on the classical isotropic Neo-Hookean-type free-energy function weighted by the actual relative density [ raquo 0=raquo curren
0]n
(see for example Carter amp Hayes 1977 Gibson amp Ashby 1997)
ordf =middot
raquo 0
raquo curren0
cedil[niexcl1] 1raquo curren
0
[12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]] (77)
Here para and middot denote the classical Lamparae constants and n is an additional exponentusually allowed to vary between 1 6 n 6 35 A selection of more advanced free-energy functions for orthotropic biological tissues can be found for example in therecent collection of publications by Cowin amp Humphrey (2001) The derivatives of thefree energy ordf with respect to the material density raquo 0 and the deformation gradientF take the format
D raquo 0ordf = [n iexcl 1]
middotraquo 0
raquo curren0
cedil[niexcl2]middot 1raquo curren
0
cedil2
[ 12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]]
DF ordf =middot
raquo 0
raquo curren0
cedil[niexcl1]middot 1raquo curren
0
cedil[ middot F + [ para ln J iexcl middot ]F iexclt]
9gtgtgtgt=
gtgtgtgt
(78)
Proc R Soc Lond A (2003)
2566 E Kuhl and P Steinmann
whereby the macrrst derivative can alternatively be expressed as D raquo 0ordf = [n iexcl 1] ordf =raquo 0
According to equation (75) the reduced macrrst PiolaKirchhoreg stress tensor
sup1brvbar t =middot
raquo 0
raquo curren0
cediln
[ middot F + [ para ln J iexcl middot ]F iexclt] (79)
can be understood as the classical Neo-Hookean stress tensor weighted by the actualrelative density [ raquo 0=raquo curren
0]n The reduced dissipation inequality
iexcl [n iexcl 1] ordf [Div R + R0] + sup3 [Div S iexcl S0] gt 0 (710)
places implicit restrictions on the dissipation generated by the density evolution Dt raquo 0
through the mass degux R and the mass source R0 This amount of dissipation hasat least to be compensated by an appropriate constitutive assumption for the extraexternal entropy input s
0 through the extra entropy degux S and the extra entropysource S0 eg
S = [n iexcl 1] ordf1sup3
R S0 = iexcl [n iexcl 1] ordf1sup3
R0 (711)
Similar to the context of chemomechanics the degux r or R is usually related to thespatial or material gradient of the density rx raquo 0 or rX raquo 0 as
r = R0b cent rx raquo 0 R = rtB cent rX raquo 0 (712)
in analogy to Fickrsquos law for concentrations Here R0 and rt denote the mass-conduction coeplusmncient introducing either a materially or a spatially isotropicresponse In the context of biomechanics we typically macrnd variations of the con-stitutive equation
R0 =middot
raquo 0
raquo curren0
cediliexclm
ordf 0 iexcl ordf curren0 (713)
for the mass source R0 where raquo curren0 and ordf curren
0 denote the reference density and the refer-ence free energy respectively while m is an additional exponent that is commonlychosen to m gt n (see Harrigan amp Hamilton 1993) Finally the evaluation of theFourier inequality (613)2 as sup1d con
0 = iexcl sup1Q cent rX ln sup3 gt 0 suggests the demacrnition of themass-specimacrc non-mechanical energy degux sup1q or sup1Q according to Fourierrsquos law as
sup1q = iexcl K0b cent rx sup3 sup1Q = iexcl ktB cent rX sup3 (714)
with K0 and kt denoting the materially or spatially isotropic conductivity In order toa priori guarantee the satisfaction of the Fourier inequality (613)2 the conductivityis required to be non-negative K0 gt 0 and kt gt 0
8 Conclusion
We have presented a general framework for the thermodynamics of open systemsThe derived macreld equations are believed to be particularly useful in biomechanicalor chemomechanical applications where attention is conmacrned to one individual sub-system of the overall matter present Due to the fact that this open subsystem isallowed to constantly gain or lose mass the balance of mass had to be enhancedby additional surface and volume terms redegecting the interaction with the `outsideworldrsquo Since the newly created mass carries a particular amount of momentum
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2567
energy and entropy all the other balance equations had to be reformulated as wellTo clarify the indeguence of the changes in mass we have introduced the notions of`volume-specimacrcrsquo and `mass-specimacrcrsquo formats The former accounts for the total indegu-ence of the changes in mass through explicit mass-dependent and additional implicitopen-system contributions The latter however is free from all the mass-dependentextra terms and thus takes the familiar structure known from classical continuumthermodynamics The mass-specimacrc format is believed to be particularly useful sinceit parallels the framework of the closed-system case Consequently permissible con-stitutive relations can be derived from the mass-specimacrc version of the dissipationinequality The underlying procedure has been illustrated for the model problem ofthermo-hyperelasticity
References
Bowen R M 1976 Theory of mixtures In Continuum physics vol III Mixtures and EM macreldtheories (ed A C Eringen) pp 1127 Academic
Carter D R amp Hayes W C 1977 The behavior of bone as a two-phase porous structure JBone Joint Surg Am 59 785794
Coleman B D amp Noll W 1963 The thermodynamics of elastic materials with heat conductionand viscosity Arch Ration Mech Analysis 13 167178
Cowin S C amp Hegedus D H 1976 Bone remodelling I Theory of adaptive elasticity JElastic 6 313326
Cowin S C amp Humphrey J D 2001 Cardiovascular soft tissue mechanics Dordrecht Kluwer
de Boer R 2000 Theory of porous media Springer
Diebels S 2000 Mikropolare Zweiphasenmodelle Formulierung auf der Basis der TheoriePoroser Medien Habilitationsschrift Bericht aus dem Institut fur Mechanik (Bauwesen)Nr II-4 Universitat Stuttgart
Ehlers W 2002 Foundations of multiphasic and porous materials In Porous media theoryexperiments and numerical applications (ed W Ehlers amp J Bluhm) pp 386 Springer
Epstein M amp Maugin G A 2000 Thermomechanics of volumetric growth in uniform bodiesInt J Plasticity 16 951978
Gibson L J amp Ashby M F 1997 The mechanics of three-dimensional cellular materials ProcR Soc Lond A 382 4359
Goldstein H 1950 Classical mechanics Addison-Wesley
Harrigan T P amp Hamilton J J 1993 Finite element simulation of adaptive bone remodellinga stability criterion and a time-stepping method Int J Numer Meth Engng 36 837854
Haupt P 2000 Continuum mechanics and theory of materials Springer
Humphrey J D 2002 Cardiovasular solid mechanics Springer
Humphrey J D amp Rajagopal K R 2002 A constrained mixture model for growth and remod-eling of soft tissues Math Models Meth Appl Sci 12 407430
Liu I S 1972 Method of Lagrange multipliers for exploitation of the entropy principle ArchRation Mech Analysis 46 131148
Liu I S 2002 Continuum mechanics Springer
Malvern L E 1969 Introduction to the mechanics of a continuous medium Englewood Clireg sNJ Prentice Hall
Maugin G A 1993 Material inhomogenities in elasticity London Chapman amp Hall
Maugin G A 1999 The thermomechanics of nonlinear irreversible behaviors World Scientimacrc
Muller I 1973 Thermodynamik die Grundlagen der Materialtheorie Dusseldorf BertelsmannUniversitatsverlag
Proc R Soc Lond A (2003)
2568 E Kuhl and P Steinmann
Muller I 1994 Grundzuge der Thermodynamik Springer
Runesson K 1978 On nonlinear consolidation of soft clay PhD thesis Department of StructuralMechanics Chalmers University of Technology Goteborg Sweden
Schrodinger E 1944 What is life Cambridge University Press
Taber L A 1995 Biomechanics of growth remodeling and morphogenesis Appl Mech Rev48 487545
Truesdell C amp Toupin R 1960 The classical macreld theories In Handbuch der Physik (edS Flugge) vol 3 Springer
Wu T Hutter K amp Svendsen B 1998 On shear deg ow of a saturated icesediment mixture withthermodynamic equilibrium pressure and momentum exchange Proc R Soc Lond A 4547188
Proc R Soc Lond A (2003)

Thermodynamics for open systems 2553
rsquo
F J DtF
B0 Bt
p0
brvbar t
b0
pt
frac14 t
bt
Figure 3 Balance of momentum momentum densities deg uxes and sources
Note that the deguxes fcurreng and fsectg can be expressed in terms of the reduced deguxterms f sup1curreng and fsup1sectg in the form
fcurreng = fsup1curreng + fdegg laquo R fsectg = fsup1sectg + fdegg laquo r (37)
Correspondingly the volume-specimacrc source terms are demacrned in terms of the reducedsource terms fsup1g0 and fsup1gt
fmacrg0 = fsup1g0 + fdeggR0 iexcl rXfdegg cent R fmacrgt = fsup1gt + fdeggRt iexcl rxfdegg cent r (38)
Each balance law can thus be transformed into a mass-specimacrc version balancingthe rate of change of the mass-specimacrc quantity fdegg = fdegg0=raquo 0 or fdegg = fdeggt=raquo t withthe corresponding reduced degux f sup1curreng and fsup1sectg and the reduced source terms fsup1g0
and fsup1gt The mass-specimacrc balance equations can be derived by subtracting fdeggtimes the balance of mass (35) from the corresponding volume-specimacrc version (36)Consequently we obtain remarkably simple generic forms of the mass-specimacrc balancelaws
raquo 0 Dtfdegg = Divfsup1curreng + fsup1g0 raquo t dtfdegg + raquo tv cent rxfdegg = divfsup1sectg + fsup1gt (39)
which are related through the Piola transforms fdegg0 = Jfdeggt fsup1g0 = Jfsup1gt andf sup1curreng = Jfsup1sectg cent F iexclt and the Euler theorem (24) Note that the mass-specimacrc formatis free from all the explicit extra terms caused by the changes in mass Howeverthis is not the case in the formulation developed by Epstein amp Maugin (2000) wherethe gradient terms rXfdegg cent R and rxfdegg cent r are part of the mass-specimacrc balanceequation (39)
4 Balance of momentum
Bearing in mind the derivation of the generic balance laws of the preceding sectionwe now elaborate their specimacrcation to yield the balance of linear momentum It willturn out that the balance of angular momentum and the balance of kinetic energy canbe interpreted as particular weighted versions of the balance of linear momentum
(a) Volume-specimacrc version
The balance of momentum represents one of the `laws of classical mechanicsrsquo Forclosed systems it was macrrst specimacred by Euler in 1776 It states that in an inertialframe the reaction of any body is equal to the load acting upon it Therein thereaction is characterized through the volume-specimacrc momentum density p0 or pt
Proc R Soc Lond A (2003)
2554 E Kuhl and P Steinmann
canonically demacrned as a spatial covector given through the partial derivative of thevolume-specimacrc kinetic-energy density K0 or Kt
K0 = 12raquo 0v cent v Kt = 1
2raquo tv cent v (41)
with respect to the spatial velocity v
p0 = v K0 = raquo 0v pt = v Kt = raquo tv (42)
The load can essentially be divided into two types namely the contact or surfaceforces represented by the momentum deguxes brvbar t and frac14 t and the at-a-distance forcesie the momentum sources b0 and bt (see macrgure 3) Consequently the material versionof the volume-specimacrc balance of momentum sometimes also referred to as `Cauchyrsquosmacrrst law of motionrsquo can be expressed as
Dtp0 = Div brvbar t + b0 (43)
In honour of the work of Piola in 1833 and Kirchhoreg in 1852 the momentum degux brvbar t
is typically referred to as the macrrst PiolaKirchhoreg stress tensor in classical continuummechanics With the help of the well-known Piola transforms
p0 = Jpt b0 = Jbt brvbar t = J frac14 t cent F iexclt (44)
the individual terms of equation (43) can be pushed forward to the spatial conmacrgu-ration The corresponding momentum degux frac14 t is commonly denoted as the Cauchystress tensor in standard continuum mechanics commemorating the early work ofCauchy in 1823 The application of Reynoldsrsquos transport theorem (211)
jDtp0 = dtpt + div(pt laquo v) (45)
yields the spatial version of the balance of momentum
dtpt + div(pt laquo v) = div frac14 t + bt (46)
which is typically applied in classical deguid mechanics The overall degux term frac14 t iexclpt laquo v redegects the convective nature of the above equation through the transport oflinear momentum pt laquo v In summary we distinguish between the material and thespatial version of the volume-specimacrc balance of momentum
Dtp0 = Div brvbar t + b0 dtpt + div(pt laquo v) = div frac14 t + bt (47)
On the Neumann boundary characterized through the material and spatial normalN and n the normal projections of the momentum deguxes of PiolaKirchhoreg andCauchy type brvbar t and frac14 t are required to be in equilibrium with the correspondingclosed- and open-system stress-vector contributions tclos ed
0 or tclos edt and top en
0 ortop en
t respectively
brvbar t cent N = tclos ed0 + t op en
0 top en0 = sup1t op en
0 + [p laquo R] cent N
frac14 t cent n = tclos edt + t op en
t top ent = sup1t op en
t + [p laquo r] cent n
)
(48)
Correspondingly the momentum sources terms b0 and bt can be understood as thesum of the closed- and the open-system volumeforce contributions bclos ed
0 or bclos edt
and bop en0 or bop en
t
b0 = bclos ed0 + bop en
0 bop en0 = sup1bop en
0 + pR0 iexcl rXp cent R
bt = bclos edt + bop en
t bop ent = sup1bop en
t + pRt iexcl rxp cent r
)
(49)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2555
While the expressions in terms of R r R0 and Rt take into account the part ofthe newly created or indegowing mass that carries the same amount of mass-specimacrcmomentum p as the original substrate the additional terms sup1t op en
0 sup1t op ent sup1b op en
0 andsup1b op en
t account for a possible diregerence in the momentum density
Remark 41 (balance of angular momentum) The volume-specimacrc angular-momentum density l0 or lt is demacrned through the vector product of the correspondinglinear momentum density p0 or pt with a distance vector a = rsquo iexcl rsquo0 from a macrxedpoint rsquo0 in space
l0 = a pound p0 lt = a pound pt (410)
In the absence of distributed couples and internal rotational degrees of freedom thevolume-specimacrc balance of angular momentum for open systems can be derived bytaking the vector product of the volume-specimacrc momentum balance (47) with thedistance vector a
a pound Dtp0 = a pound Div brvbar t + a pound b0 (411)
With the demacrnition of the angular momentum (410) the above equation can berewritten as
Dtl0 = Div(a pound brvbar t) + a pound b0 iexcl F pound brvbar t (412)
Thereby the vector product of the two second-order tensors iexcl F pound brvbar t can beexpressed in terms of the axial vector of the related second-order tensor [F cent brvbar ]axlas iexcl F pound brvbar t = 2[F cent brvbar ]axl It proves convenient for later purposes to reformulate theabove statement in terms of the reduced momentum degux sup1brvbar t = brvbar t iexcl p laquo R andthe reduced momentum source sup1b0 = b0 iexcl pR0 + rXp cent R
Dtl0 = Div(a pound [ sup1brvbar t +p laquoR])+a pound [sup1b0 +pR0 iexcl rXp cent R] iexcl F pound [ sup1brvbar t +plaquoR] (413)
Herein the third term on the right-hand side
iexcl F pound [ sup1brvbar t + p laquo R] = 2[F cent [ sup1brvbar + R laquo p]]axl
represents the volume-specimacrc production of the angular momentum l0 Anticipatinglater considerations we would like to point out that assuming the symmetry of thereduced momentum degux F cent sup1brvbar = sup1brvbar t cent F t or equivalently sup1frac14 = sup1frac14 t the production ofangular momentum reduces to 2[F cent [R laquo p]]axl or 2[r laquo p]axl respectively
Remark 42 (balance of kinetic energy) Although the balance of kineticenergy does not constitute an independent balance law it proves signimacrcant to takea closer look at it since it will help to introduce work conjugate stress and strainmeasures Moreover the balance of kinetic energy will be used to identify the externaland internal mechanical power which are essential for our further thermodynamicalconsiderations The starting point is the material time derivative of the volume-specimacrc kinetic-energy density K0 = 1
2raquo 0v cent v
DtK0 = raquo 0 DtK + K Dt raquo 0 = p0 cent Dtv + K Dt raquo 0 = v cent Dtp0 iexcl K Dt raquo 0 (414)
With the projection of the volume-specimacrc balance of momentum (43) with the spa-tial velocity v and the balance of mass (35)1 weighted by the mass-specimacrc kinetic-energy density K
v cent Dtp0 = Div(v cent brvbar t) + v cent b0 iexcl rXv brvbar t
KDt raquo 0 = Div(KR) + KR0 iexcl rXK cent R
)
(415)
Proc R Soc Lond A (2003)
2556 E Kuhl and P Steinmann
equation (414) can be rewritten in the explicit form
DtK0 = Div(v cent brvbar t iexcl KR) + v cent b0 iexcl KR0 + rXK cent R iexcl brvbar t DtF (416)
In what follows it will prove convenient to reformulate the above equation in terms ofthe reduced momentum degux sup1brvbar t = brvbar t iexcl p laquo R and the reduced momentum sourcesup1b0 = b0 iexcl pR0 + rXp cent R which can be related to their overall counterparts brvbar t andb0 through the following identities
Div(v cent brvbar t) = Div(v cent sup1brvbar t) + Div(2KR)
v cent b0 = v cent sup1b0 + 2KR0 iexcl v cent rXp cent R
brvbar t DtF = sup1brvbar t DtF + p cent rXv cent R
9gtgt=
gtgt(417)
With the help of the above equations and the identity v cent rX p + p cent rXv = 2rXKfollowing from v cent p = 2K equation (416) can be reformulated in the following way
DtK0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R iexcl sup1brvbar t DtF (418)
As stated by Stokes in 1857 the rate of change of the kinetic energy is equal to theexternal mechanical power minus the internal mechanical power Consequently theright-hand side of the above equation enables the identimacrcation of the volume-specimacrcexternal and internal mechanical power pext
0 and pin t0
pext0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R
pin t0 = sup1brvbar t DtF
)(419)
whereby pext0 characterizes the total rate of working of mechanical actions on the
body This rate of working consists of the degux contribution v cent sup1brvbar t + KR and thesource term v cent sup1b0 + KR0 iexcl rXK cent R The internal mechanical power pin t
0 consistsexclusively of the production term for the kinetic energy as sup1brvbar t DtF The demacrnitionof the latter suggests the interpretation of the reduced momentum degux sup1brvbar t and thematerial time derivative of the deformation gradient DtF as work conjugate pairsWith the above abbreviations at hand the balance of kinetic energy can be rewrittenin a form which has been denoted as the local form the `theorem of energyrsquo by Maugin(1993)
DtK0 = pext0 iexcl pin t
0 dtKt + div(Ktv) = pextt iexcl pin t
t (420)
The spatial version of the balance of kinetic energy (420)2 follows naturally byapplying the appropriate Piola transforms K0 = JKt
pext0 = Jpext
t and pin t0 = Jpin t
t along with Reynoldsrsquos transport theorem (211)
(b) Mass-specimacrc version
The mass-specimacrc version of the balance of momentum is based on the mass-specimacrckinetic-energy density
K = 12v cent v (421)
demacrning the quantity to be balanced as its partial derivative with respect to thespatial velocity v
p = v K = v (422)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2557
The rate of change of the mass-specimacrc momentum density p ie the covariant spatialvelocity is balanced with the reduced momentum deguxes sup1brvbar t or sup1frac14 t and the reducedmomentum sources sup1b0 or sup1bt By subtracting the balance of mass (35) weighted bythe momentum density p from the volume-specimacrc momentum balance (47) we canderive the diregerent versions of the mass-specimacrc momentum balance
raquo 0Dtp = Div sup1brvbar t + sup1b0 raquo t dtp + raquo tv cent rxp = div sup1frac14 t + sup1bt (423)
The reduced momentum deguxes sup1brvbar t and sup1frac14 t which are related to the overall momen-tum deguxes brvbar t and frac14 t through sup1brvbar t = brvbar t iexcl p laquo R and sup1frac14 t = frac14 t iexcl p laquo r are deter-mined by the closed- and open-system stress-vector contributions tclos ed
0 and sup1t op en0
or tclos edt and sup1t op en
t respectively on the Neumann boundary
sup1brvbar t cent N = tclos ed0 + sup1t op en
0
sup1frac14 t cent n = tclos edt + sup1t op en
t
)(424)
while the reduced momentum sources sup1b0 and sup1bt are given as the sum of the classicalclosed-system volume force contributions bclos ed
0 or bclos edt and the reduced open-
system contributions sup1b op en0 or sup1b op en
t
sup1b0 = bclos ed0 + sup1bop en
0
sup1bt = bclos edt + sup1bop en
t
)(425)
Note that the mass-specimacrc momentum balance (423) is free from all the explicitextra terms caused by the changes in mass The indeguence of the open system mani-fests itself only implicitly through the prescribed boundary terms sup1t op en
0 and sup1t op ent and
the prescribed volume sources sup1b op en0 and sup1b op en
t The convective indeguence introducedthrough the raquo tv cent rxp term however is also present in the closed-system case
Remark 43 (balance of angular momentum) The mass-specimacrc angular-momentum density l is given as the vector product of the mass-specimacrc momentumdensity p with the distance vector a = rsquo iexcl rsquo0
l = a pound p (426)
Consequently the mass-specimacrc version of the balance of angular momentum followsfrom the vector product of the mass-specimacrc momentum balance (423) with thedistance vector a
a pound raquo 0Dtp = a pound Div sup1brvbar t + a pound sup1b0 (427)
By making use of the demacrnition (426) the above equation can be rewritten as
raquo 0Dtl = Div(a pound sup1brvbar t) + a pound sup1b0 iexcl F pound sup1brvbar t (428)
Again the third term on the right-hand side iexcl F pound sup1brvbar t = 2[F cent sup1brvbar ]axl representsthe production of the mass-specimacrc angular momentum l If we require the balanceof angular momentum to represent an individual independent statement
raquo 0Dtl = Div(a pound sup1brvbar t) + a pound sup1b0 (429)
this production term has to vanish identically This condition thus reveals the sym-metry requirements
F cent sup1brvbar = sup1brvbar t cent F t sup1frac14 = sup1frac14 t (430)
Proc R Soc Lond A (2003)
2558 E Kuhl and P Steinmann
The material and the spatial versions (430)1 and (430)2 respectively are relatedthrough the corresponding Piola transform sup1brvbar t = J sup1frac14 t cent F iexclt A comparison of thevolume-specimacrc statement (413) with its mass-specimacrc counterpart (429) indicatesthat the in- or outdegux of mass R or r produces an additional amount of angularmomentum unless
F cent R laquo p = p laquo R cent F t r laquo p = p laquo r (431)
ie the mass degux F centR or r is constitutively demacrned to be coaxial to the mass-specimacrcmomentum density p
Remark 44 (balance of kinetic energy) To investigate the mass-specimacrc ver-sion of the balance of kinetic energy we need to evaluate the material time derivativeof the mass-specimacrc kinetic-energy density K = 1
2v centv which can easily be derived by
subtracting the weighted balance of mass (415)2 from the material time derivativeof the volume-specimacrc kinetic-energy density K0 given in equation (418) as
raquo 0 DtK = DtK0 iexcl K Dt raquo 0 (432)
and thusraquo 0 DtK = Div(v cent sup1brvbar t) + v cent sup1bext
0 iexcl sup1brvbar t DtF (433)
Consequently we can identify the mass-specimacrc external and internal mechanicalpower sup1pext
0 and sup1pin t0 respectively
sup1pext0 = pext
0 iexcl KDt raquo 0 = Div(v cent sup1brvbar t) + v cent sup1b0
sup1pin t0 = pin t
0 = sup1brvbar t DtF
)(434)
It is worth noting that the diregerence of the mass- and volume-specimacrc formu-lation manifests itself only in the demacrnition of the external mechanical powersup1pext
0 = pext0 iexcl KDt raquo 0 while the mass-specimacrc internal power is identical to its volume-
specimacrc counterpart as sup1pin t0 = pin t
0 Consequently the material and the spatial versionof the mass-specimacrc balance of kinetic energy take the formats
raquo 0 DtK = sup1pext0 iexcl sup1pin t
0 raquo t dtK + raquo tv cent rxK = sup1pextt iexcl sup1pin t
t (435)
whereby both formulations are related through the corresponding Piola transformswith sup1pext
0 = J sup1pextt and sup1pin t
0 = Jsup1pin tt and the Euler theorem (24)
5 Balance of energy
The balance of total energy as a representation of the macrrst law of thermodynamicsbalances the rate of change of the volume-specimacrc total energy density E0 or Et asthe sum of the kinetic and internal energy density E0 = K0 + I0 or Et = Kt + It
with the external power In classical continuum mechanics of closed systems thisexternal power is composed of a purely mechanical contribution pext
0 or pextt and a
non-mechanical thermal contribution qext0 or qext
t Therefore the balance of energy issometimes referred to as the `principle of interconvertibility of heat and mechanicalworkrsquo a notion which was known to Carnot in 1832 and experimentally verimacredby Joule in 1843 However when dealing with open systems we have to generalizethe demacrnition of the non-mechanical external power by including additional externalopen-system contributions in the demacrnition of qext
0 and qextt (cf Malvern 1969 x 54)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2559
rsquo
F J DtF
B0 Bt
E0
v cent brvbar t Q
v cent b0 Q0
Et
v cent frac14 t q
v cent bt Qt
Figure 4 Balance of energy energy densities deg uxes and sources
(a) Volume-specimacrc version
For the spatial-motion problem the rate of change of the volume-specimacrc totalenergy density E0 = raquo 0E can be expressed in the form (cf macrgure 4)
DtE0 = Div(v cent sup1brvbar t iexcl sup1Q + ER) + v cent sup1b0 + sup1Q0 + ER0 iexcl rXE cent R (51)
Thereby in addition to the purely mechanical external power pext0 demacrned in equa-
tion (419) we have included the non-mechanical external power qext0 accounting
for the classical thermal eregects of the closed system and the additional open-systemeregects as an additional non-mechanical supply of energy
qext0 = Div( iexcl Q) + Q0 (52)
Similar to the mechanical power the non-mechanical power consists of a degux and asource contribution denoted by Q and Q0 respectively The former is composed ofthe reduced outward non-mechanical energy degux sup1Q modimacred by the explicit extradegux due to the open system IR while the latter is the sum of the reduced non-mechanical energy source sup1Q0 enhanced by the explicit eregects of the open systemIR0 and rXI cent R
pext0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R
qext0 = Div( iexcl sup1Q + IR) + sup1Q0 + IR0 iexcl rXI cent R
)
(53)
Equation (51) can thus be reformulated in the concise form
DtE0 = pext0 + qext
0 dtEt + div(Etv) = pextt + qext
t (54)
which for the classical closed-system case dates back to the early works of Duhem in1892 Again the spatial version (54)2 follows from the appropriate Piola transformsE0 = JEt
pext0 = Jpext
t qext0 = Jqext
t Q = Jq cent F iexclt and sup1Q = J sup1q cent F iexclt along withReynoldsrsquos transport theorem (211) The demacrnition of the non-mechanical energydeguxes Q and q parallels the introduction of the macrrst PiolaKirchhoreg stress tensorbrvbar and the Cauchy stress frac14 On the Neumann boundary the non-mechanical energydeguxes Q and q are given in terms of the normal projection of the classical heat deguxdensities qclos ed
0 and qclos edt and the additional open-system contributions qop en
0 andqop en
t Q cent N = qclos ed
0 + qop en0 qop en
0 = sup1q op en0 iexcl IR cent N
q cent n = qclos edt + qop en
t qop ent = sup1q op en
t iexcl Ir cent n
)(55)
Proc R Soc Lond A (2003)
2560 E Kuhl and P Steinmann
Moreover the non-mechanical energy sources Q0 and Qt can be understood as thesum of the classical heat source Qclos ed
0 and Qclos edt and an additional non-mechanical
energy source taking into account the nature of the open system Qop en0 and Qop en
t
Q0 = Qclos ed0 + Qop en
0 Qop en0 = sup1Qop en
0 + IR0 iexcl rXI cent R
Qt = Qclos edt + Qop en
t Qop ent = sup1Qop en
t + IRt iexcl rxI cent r
)(56)
In formal analogy to the demacrnition of the momentum quantities the expressions interms of R r R0 and Rt take into account the part of the newly added mass thatcarries the same amount of non-mechanical energy as the original substrate while theadditional open-system terms sup1q op en
0 sup1q op ent sup1Qop en
0 and sup1Qop ent account for a possible
diregerence in non-mechanical energy
Remark 51 (balance of internal energy) For further thermodynamical con-siderations it proves convenient to consider the volume-specimacrc internal energy den-sity I0 = E0 iexcl K0 or It = Et iexcl Kt given as the diregerence of the corresponding totalenergy density and the kinetic-energy density Consequently the two versions of thebalance of internal energy follow from subtracting the balance of kinetic energy (420)from the total energy balance (54)
DtI0 = pin t0 + qext
0 dtIt + div(Itv) = pin tt + qext
t (57)
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the equations derived above balances the mass-specimacrc energy density E = E0=raquo 0 with the mass-specimacrc external mechanical powersup1pext
0 introduced in (434) and the mass-specimacrc non-mechanical power sup1qext0 as
sup1qext0 = qext
0 iexcl IDt raquo 0 = iexcl Div sup1Q + sup1Q0 (58)
The corresponding balance equations
raquo 0 DtE = sup1pext0 + sup1qext
0 raquo t dtE + raquo tv cent rxE = sup1pextt + sup1qext
t (59)
follow from subtracting the corresponding balance of mass (35) weighted by the totalenergy E from the volume-specimacrc energy balance (54) The spatial version (59)2can be derived by applying the corresponding Piola transforms with sup1pext
0 = Jsup1pextt and
sup1qext0 = J sup1qext
t and the Euler theorem (24) Again we can relate the reduced energydeguxes sup1Q and sup1q demacrned through sup1Q = Q iexcl IR and sup1q = q iexcl Ir to the classical heatdegux qclos ed
0 or qclos edt and the energy degux caused by additional eregects of the open
system sup1q op en0 and sup1q op en
t
sup1Q cent N = qclos ed0 + sup1q op en
0
sup1q cent n = qclos edt + sup1q op en
t
)(510)
Moreover the reduced non-mechanical energy sources sup1Q0 and sup1Qt are given as the sumof the classical heat source of a closed system Qclos ed
0 and Qclos edt and the additional
open-system contribution to the energy sup1Qop en0 and sup1Qop en
t
sup1Q0 = Qclos ed0 + sup1Qop en
0
sup1Qt = Qclos edt + sup1Qop en
t
)(511)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2561
Again as opposed to the formulation developed by Epstein amp Maugin (2000) themass-specimacrc format is free from all the explicit extra terms caused by changes inmass and thus resembles the balance of energy known from classical mechanics
Remark 52 (balance of internal energy) A reduction to the balance ofinternal energy I = E iexcl K follows from subtracting the balance of kinetic energy(435) from the balance of total energy (59)
raquo 0 DtI = sup1pin t0 + sup1qext
0 raquo t dtI + raquo tv cent rxI = sup1pin tt + sup1qext
t (512)
6 Balance of entropy
The macrrst law of thermodynamics in the form of the balance of energy expressesthe interconvertibility of heat and work However the balance of energy itself doesnot place any restrictions on the direction of the thermodynamical process Thesecond law of thermodynamics the balance of entropy postulates the existence ofan absolute temperature and of a specimacrc entropy as a state function Through theinternal production of the latter which is required to either vanish for reversibleprocesses or be strictly positive for irreversible processes a direction is imposedon the thermodynamical process Recall that when dealing with open systems amacrxed material volume B0 is allowed to constantly gain or lose mass Open systemsnaturally exhibit an additional entropy degux and entropy source caused by the addedmass as pointed out earlier in the famous monograph by Schrodinger (1944 x 6) aswell as by Malvern (1969 x 56) or also recently by Epstein amp Maugin (2000) Theindeguence of changes in mass on the entropy is twofold On the one hand it is redegectedthrough the explicit open-system entropy degux SR and the related source terms SR0
and iexcl rXS cent R On the other hand we will introduce the reduced entropy degux andsource sup1H and sup1H0 respectively which in turn split into the extra non-mechanicalenergy terms sup1Q and sup1Q0 divided by the absolute temperature sup3 and an extra entropydegux and source S and S0 While the former parallel the introduction of the entropydegux and source in classical closed-system thermodynamics the contributions S andS0 account for the diregerence in entropy of the added mass and the original substrate
Remark 61 (balance of entropy versus entropy inequality) In the relatedliterature the entropy is often introduced through the entropy inequality For thesake of analogy we will treat the entropy as a balance quantity in the followingIts evolution is thus balanced with the sum of the external and internal entropyproduction whereby the latter is constrained to be non-negative throughout In thecase of closed-system thermodynamics this approach has been followed for exampleby Truesdell amp Toupin (1960 xx 256 and 257) Haupt (2000 x 33) or Liu (2002 x 5)
(a) Volume-specimacrc version
The balance of entropy balances the volume-specimacrc entropy density S0 = raquo 0S withthe external entropy input hext
0 and the internal entropy production hin t0 Thereby
the former consists of the entropy degux H across the material surface B0 and theentropy source H0 in the material domain B0 (cf macrgure 5)
hext0 = Div( iexcl H ) + H0 (61)
Proc R Soc Lond A (2003)
2562 E Kuhl and P Steinmann
rsquo
F J DtF
B0 Bt
S0
H S
H0 S0
St
h s
Ht St
Figure 5 Balance of entropy entropy densities deg uxes and sources
The external entropy degux H is introduced as the sum of the reduced external entropydegux sup1H enhanced by the explicit open-system contribution SR Accordingly theexternal entropy source H0 consists of the reduced entropy source sup1H0 modimacred byadditional terms SR0 and iexcl rXS cent R accounting for the explicit open-system con-tribution to the entropy supply
hext0 = Div( iexcl sup1H + SR) + sup1H0 + SR0 iexcl rXS cent R
hin t0 gt 0
)(62)
Just like in classical thermodynamics of closed systems the internal entropy produc-tion hin t
0 is required to be point-wise non-negative The balance of entropy can thusbe expressed in the following form
DtS0 = hext0 + hin t
0 dtSt + div(Stv) = hextt + hin t
t (63)
Again the material and the spatial version are related through the correspond-ing Piola transforms S0 = JSt
hext0 = Jhext
t hin t0 = Jhin t
t H = Jh cent F iexclt andsup1H = J sup1h cent F iexclt in combination with Reynoldsrsquos transport theorem Note that alter-
natively the balance of entropy which is primarily nothing but a formal demacrnitionof the entropy production can be recast into the inequality DtS0 iexcl hext
0 gt 0 Thiscondition which is typically referred to as `postulate of irreversibilityrsquo in classicalthermodynamics (see Truesdell amp Toupin 1960 x 258) induces a direction to thethermodynamic process Next we will introduce Neumann boundary conditions forthe spatial-motion Kirchhoreg and Cauchy type entropy degux H and h in terms of theclassical closed-system entropy degux contribution hclos ed
0 or hclos edt and the additional
open-system contribution hop en0 or hop en
t
H cent N = hclos ed0 + hop en
0 hop en0 = sup1hop en
0 iexcl SR cent N
h cent n = hclos edt + hop en
t hop ent = sup1hop en
t iexcl Sr cent n
)
(64)
Accordingly the entropy sources H0 and Ht are introduced as the sum of the classicalentropy source of the closed system Hclos ed
0 or Hclos edt and the additional entropy
source accounting for the nature of the open system Hop en0 or Hop en
t
H0 = Hclos ed0 + Hop en
0 Hop en0 = sup1Hop en
0 + SR0 iexcl rXS cent R
Ht = Hclos edt + Hop en
t Hop ent = sup1Hop en
t + SRt iexcl rxS cent r
)
(65)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2563
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the above equations states that the rate of changeof the mass-specimacrc entropy S = S0=raquo 0 is in equilibrium with the mass-specimacrcexternal entropy input sup1hext
0 and the mass-specimacrc internal entropy production sup1hin t0
which are introduced in the following way
sup1hext0 = hext
0 iexcl SDt raquo 0 = iexcl Div sup1H + sup1H0
sup1hin t0 = hin t
0 gt 0
)
(66)
The resulting material and spatial version of the balance of entropy
raquo 0 DtS = sup1hext0 + sup1hin t
0 raquo t dtS + raquo tv cent rxS = sup1hextt + sup1hin t
t (67)
which can be derived by subtracting S times the balance of mass (35) from thevolume-specimacrc balance of entropy (63) are related via the appropriate Piola trans-forms sup1hext
0 = Jsup1hextt and sup1hin t
0 = Jsup1hin tt and the Euler theorem (24) Moreover we can
relate the reduced entropy deguxes sup1H and sup1h demacrned through sup1H = H iexcl SR andsup1h = h iexcl Sr to the classical entropy degux of the closed system hclos ed
0 or hclos edt and
the entropy degux caused by additional eregects of the open system sup1hop en0 or sup1hop en
t
sup1H cent N = hclos ed0 + sup1hop en
0
sup1h cent n = hclos edt + sup1hop en
t
)(68)
Accordingly the reduced entropy sources sup1H0 = H0 iexcl SR0 + rXS cent R and sup1Ht = Ht iexclSRt + rxS cent r are given as the sum of the classical closed-system entropy sourceHclos ed
0 or Hclos edt and the additional open-system contribution to the entropy source
sup1Hop en0 or sup1Hop en
t sup1H0 = Hclos ed
0 + sup1Hop en0
sup1Ht = Hclos edt + sup1Hop en
t
)
(69)
Remark 62 (dissipation inequality) For further elaboration it proves con-venient to set up relations between the reduced entropy degux sup1H and the reducednon-mechanical energy degux sup1Q and between the reduced entropy source sup1H0 and thereduced non-mechanical energy source sup1Q0 in terms of the absolute temperature sup3 an extra entropy degux S and an extra entropy source S0
sup1H =1sup3
sup1Q + S sup1H0 =1sup3
sup1Q0 + S0 (610)
The above equations can be understood as a generalization of the ideas of Cowinamp Hegedus (1976) who have suggested including the additional entropy source S0
accounting for changes in entropy caused by changes in mass that are not consideredimplicitly through the changes in energy sup1Q0 Both the additional entropy degux S andthe entropy source S0 which we shall summarize in the term s
0 = iexcl Div S + S0 inthe following have to be determined constitutively These additional terms can beunderstood as an explicit representation of the exchange of entropy with the `outsideworldrsquo We now turn to the evaluation of the above-stated second law of thermo-dynamics by recasting it into an appropriate form of the dissipation inequality astatement that places further restrictions on the form of the constitutive response
Proc R Soc Lond A (2003)
2564 E Kuhl and P Steinmann
functions For this purpose we shall interpret the internal entropy production sup1hin t0 as
a measure for the degree of irreversibility introducing the dissipation rate sup1d0 as the
internal entropy production weighted by the absolute temperature as sup1d0 = sup3 sup1hin t
0 gt 0With the help of the balance of entropy (67)1 the relations (610) and the bal-ance of internal energy (512)1 the dissipation rate can be reformulated to yield theClausiusDuhem inequality in an internal energy based fashion
sup1d0 = sup1pin t
0 iexcl raquo 0Dt[I iexcl sup3 S ] iexcl raquo 0S Dt sup3 iexcl s0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (611)
By making use of the appropriate LegendreFenchel transform introducing theHelmholtz free energy ordf = I iexcl sup3 S we end up with the classical free-energy-basedversion of the ClausiusDuhem inequality
sup1d0 = sup1brvbar t DtF iexcl raquo 0 Dt ordf iexcl raquo 0S Dt sup3 iexcl s
0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (612)
which is particularly useful when the temperature sup3 rather than the entropy S isused as the independent variable In classical thermodynamics the ClausiusDuheminequality (612) is typically decomposed into a local and a conductive contributionsup1d loc
0 and sup1dcon0
sup1d loc0 = sup1brvbar t DtF iexcl raquo 0Dt ordf iexcl raquo 0SDt sup3 iexcl s
0 sup3 gt 0 sup1d con0 = iexcl sup1Q cent rX ln sup3 gt 0 (613)
whereby the local term sup1d loc0 gt 0 represents the ClausiusPlanck inequality for open
systems while the remaining conductive term sup1dcon0 gt 0 is typically referred to as a
Fourier inequality As a suplusmncient condition for sup1d0 gt 0 both inequalities are required
to hold separately In what follows we shall apply the dissipation inequality (613) toderive constitutive equations for the reduced momentum degux sup1brvbar t and the entropy SIn addition the evaluation of the dissipation inequality places further restrictions onthe extra entropy exchange s
0 The underlying procedure will be highlighted in detailfor the simple model problem of thermo-hyperelasticity in the following section
Remark 63 Note that at this stage the introduction of the reduced entropydegux and source sup1H = sup1Q=sup3 + S and sup1H0 = sup1Q0=sup3 + S0 as introduced in equations(610) is a mere constitutive assumption Nevertheless for particular constitutive-model problems the postulated relations can be verimacred through the evaluation ofthe dissipation inequality according to Muller (1973) and Liu (1972) (see also Liu2002) It will turn out that in most cases equations (610) are justimacred with thetrivial solution S = 0 and S0 = 0 However assuming this result from the veryoutset might be too restrictive for complex constitutive models as also pointed outby Epstein amp Maugin (2000)
7 Thermo-hyperelasticity
We are now in a position to exploit the second law of thermodynamics in the formof the ClausiusDuhem inequality along the lines of Coleman amp Noll (1963) Thestraightforward evaluation of the local part of the dissipation inequality in the formof the ClausiusPlanck inequality (613)1 will result in the demacrnition of the reducedmomentum degux sup1brvbar and the mass-specimacrc entropy density S Its conductive sup-plement (613)2 the Fourier inequality suggests the demacrnition of the reduced non-mechanical energy degux sup1Q along the lines of the classical linear heat conduction intro-duced by Fourier in 1822 Finally the mass degux R will be introduced constitutively
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2565
in the context of classical linear mass diregusion according to Fickrsquos law Here wewill thus restrict ourselves to a thermo-hyperelastic-model problem for which all thedissipation is caused exclusively by heat conduction and possibly by an additionalopen-system contribution of the `outside worldrsquo In what follows we shall make useof the multiplicative decomposition of the free energy ordf 0
ordf 0 = raquo 0 ordf (71)
Thereby the mass-specimacrc free-energy density ordf is expressed in terms of the materialdensity raquo 0 the deformation gradient F and the absolute temperature sup3 with a pos-sible explicit dependence on the material placement X Within the thermodynamicsof open systems the material density raquo 0 is allowed to vary in space and time is thusintroduced as function of the material placement X and the time t
ordf = ordf ( raquo 0 F sup3 X) raquo 0 = raquo 0(X t) (72)
Consequently the material time derivative of the free-energy density is formally givenin the form
Dt ordf = D raquo 0ordf Dt raquo 0 + DF ordf DtF + D sup3 ordf Dt sup3 (73)
The evaluation of the ClausiusPlanck inequality (613)1
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 + [ sup1brvbar t iexcl raquo 0DF ordf ] DtF iexcl [ raquo 0S + raquo 0 D sup3 ordf ] Dt sup3 iexcl s0 sup3 gt 0 (74)
demacrnes the reduced macrrst PiolaKirchhoreg stress tensor sup1brvbar t and the mass-specimacrcentropy S as thermodynamically conjugate variables to the deformation gradientF and the absolute temperature sup3
sup1brvbar t = raquo 0 DF ordf S = iexcl D sup3 ordf (75)
As in Cowin amp Hegedus (1976) we are left with a reduced inequality of the form
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 iexcl s0 sup3 gt 0 (76)
In biomechanics the simplest choice for the free-energy function ordf for cellular mate-rials such as open-pored biological tissues is based on the classical isotropic Neo-Hookean-type free-energy function weighted by the actual relative density [ raquo 0=raquo curren
0]n
(see for example Carter amp Hayes 1977 Gibson amp Ashby 1997)
ordf =middot
raquo 0
raquo curren0
cedil[niexcl1] 1raquo curren
0
[12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]] (77)
Here para and middot denote the classical Lamparae constants and n is an additional exponentusually allowed to vary between 1 6 n 6 35 A selection of more advanced free-energy functions for orthotropic biological tissues can be found for example in therecent collection of publications by Cowin amp Humphrey (2001) The derivatives of thefree energy ordf with respect to the material density raquo 0 and the deformation gradientF take the format
D raquo 0ordf = [n iexcl 1]
middotraquo 0
raquo curren0
cedil[niexcl2]middot 1raquo curren
0
cedil2
[ 12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]]
DF ordf =middot
raquo 0
raquo curren0
cedil[niexcl1]middot 1raquo curren
0
cedil[ middot F + [ para ln J iexcl middot ]F iexclt]
9gtgtgtgt=
gtgtgtgt
(78)
Proc R Soc Lond A (2003)
2566 E Kuhl and P Steinmann
whereby the macrrst derivative can alternatively be expressed as D raquo 0ordf = [n iexcl 1] ordf =raquo 0
According to equation (75) the reduced macrrst PiolaKirchhoreg stress tensor
sup1brvbar t =middot
raquo 0
raquo curren0
cediln
[ middot F + [ para ln J iexcl middot ]F iexclt] (79)
can be understood as the classical Neo-Hookean stress tensor weighted by the actualrelative density [ raquo 0=raquo curren
0]n The reduced dissipation inequality
iexcl [n iexcl 1] ordf [Div R + R0] + sup3 [Div S iexcl S0] gt 0 (710)
places implicit restrictions on the dissipation generated by the density evolution Dt raquo 0
through the mass degux R and the mass source R0 This amount of dissipation hasat least to be compensated by an appropriate constitutive assumption for the extraexternal entropy input s
0 through the extra entropy degux S and the extra entropysource S0 eg
S = [n iexcl 1] ordf1sup3
R S0 = iexcl [n iexcl 1] ordf1sup3
R0 (711)
Similar to the context of chemomechanics the degux r or R is usually related to thespatial or material gradient of the density rx raquo 0 or rX raquo 0 as
r = R0b cent rx raquo 0 R = rtB cent rX raquo 0 (712)
in analogy to Fickrsquos law for concentrations Here R0 and rt denote the mass-conduction coeplusmncient introducing either a materially or a spatially isotropicresponse In the context of biomechanics we typically macrnd variations of the con-stitutive equation
R0 =middot
raquo 0
raquo curren0
cediliexclm
ordf 0 iexcl ordf curren0 (713)
for the mass source R0 where raquo curren0 and ordf curren
0 denote the reference density and the refer-ence free energy respectively while m is an additional exponent that is commonlychosen to m gt n (see Harrigan amp Hamilton 1993) Finally the evaluation of theFourier inequality (613)2 as sup1d con
0 = iexcl sup1Q cent rX ln sup3 gt 0 suggests the demacrnition of themass-specimacrc non-mechanical energy degux sup1q or sup1Q according to Fourierrsquos law as
sup1q = iexcl K0b cent rx sup3 sup1Q = iexcl ktB cent rX sup3 (714)
with K0 and kt denoting the materially or spatially isotropic conductivity In order toa priori guarantee the satisfaction of the Fourier inequality (613)2 the conductivityis required to be non-negative K0 gt 0 and kt gt 0
8 Conclusion
We have presented a general framework for the thermodynamics of open systemsThe derived macreld equations are believed to be particularly useful in biomechanicalor chemomechanical applications where attention is conmacrned to one individual sub-system of the overall matter present Due to the fact that this open subsystem isallowed to constantly gain or lose mass the balance of mass had to be enhancedby additional surface and volume terms redegecting the interaction with the `outsideworldrsquo Since the newly created mass carries a particular amount of momentum
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2567
energy and entropy all the other balance equations had to be reformulated as wellTo clarify the indeguence of the changes in mass we have introduced the notions of`volume-specimacrcrsquo and `mass-specimacrcrsquo formats The former accounts for the total indegu-ence of the changes in mass through explicit mass-dependent and additional implicitopen-system contributions The latter however is free from all the mass-dependentextra terms and thus takes the familiar structure known from classical continuumthermodynamics The mass-specimacrc format is believed to be particularly useful sinceit parallels the framework of the closed-system case Consequently permissible con-stitutive relations can be derived from the mass-specimacrc version of the dissipationinequality The underlying procedure has been illustrated for the model problem ofthermo-hyperelasticity
References
Bowen R M 1976 Theory of mixtures In Continuum physics vol III Mixtures and EM macreldtheories (ed A C Eringen) pp 1127 Academic
Carter D R amp Hayes W C 1977 The behavior of bone as a two-phase porous structure JBone Joint Surg Am 59 785794
Coleman B D amp Noll W 1963 The thermodynamics of elastic materials with heat conductionand viscosity Arch Ration Mech Analysis 13 167178
Cowin S C amp Hegedus D H 1976 Bone remodelling I Theory of adaptive elasticity JElastic 6 313326
Cowin S C amp Humphrey J D 2001 Cardiovascular soft tissue mechanics Dordrecht Kluwer
de Boer R 2000 Theory of porous media Springer
Diebels S 2000 Mikropolare Zweiphasenmodelle Formulierung auf der Basis der TheoriePoroser Medien Habilitationsschrift Bericht aus dem Institut fur Mechanik (Bauwesen)Nr II-4 Universitat Stuttgart
Ehlers W 2002 Foundations of multiphasic and porous materials In Porous media theoryexperiments and numerical applications (ed W Ehlers amp J Bluhm) pp 386 Springer
Epstein M amp Maugin G A 2000 Thermomechanics of volumetric growth in uniform bodiesInt J Plasticity 16 951978
Gibson L J amp Ashby M F 1997 The mechanics of three-dimensional cellular materials ProcR Soc Lond A 382 4359
Goldstein H 1950 Classical mechanics Addison-Wesley
Harrigan T P amp Hamilton J J 1993 Finite element simulation of adaptive bone remodellinga stability criterion and a time-stepping method Int J Numer Meth Engng 36 837854
Haupt P 2000 Continuum mechanics and theory of materials Springer
Humphrey J D 2002 Cardiovasular solid mechanics Springer
Humphrey J D amp Rajagopal K R 2002 A constrained mixture model for growth and remod-eling of soft tissues Math Models Meth Appl Sci 12 407430
Liu I S 1972 Method of Lagrange multipliers for exploitation of the entropy principle ArchRation Mech Analysis 46 131148
Liu I S 2002 Continuum mechanics Springer
Malvern L E 1969 Introduction to the mechanics of a continuous medium Englewood Clireg sNJ Prentice Hall
Maugin G A 1993 Material inhomogenities in elasticity London Chapman amp Hall
Maugin G A 1999 The thermomechanics of nonlinear irreversible behaviors World Scientimacrc
Muller I 1973 Thermodynamik die Grundlagen der Materialtheorie Dusseldorf BertelsmannUniversitatsverlag
Proc R Soc Lond A (2003)
2568 E Kuhl and P Steinmann
Muller I 1994 Grundzuge der Thermodynamik Springer
Runesson K 1978 On nonlinear consolidation of soft clay PhD thesis Department of StructuralMechanics Chalmers University of Technology Goteborg Sweden
Schrodinger E 1944 What is life Cambridge University Press
Taber L A 1995 Biomechanics of growth remodeling and morphogenesis Appl Mech Rev48 487545
Truesdell C amp Toupin R 1960 The classical macreld theories In Handbuch der Physik (edS Flugge) vol 3 Springer
Wu T Hutter K amp Svendsen B 1998 On shear deg ow of a saturated icesediment mixture withthermodynamic equilibrium pressure and momentum exchange Proc R Soc Lond A 4547188
Proc R Soc Lond A (2003)

2554 E Kuhl and P Steinmann
canonically demacrned as a spatial covector given through the partial derivative of thevolume-specimacrc kinetic-energy density K0 or Kt
K0 = 12raquo 0v cent v Kt = 1
2raquo tv cent v (41)
with respect to the spatial velocity v
p0 = v K0 = raquo 0v pt = v Kt = raquo tv (42)
The load can essentially be divided into two types namely the contact or surfaceforces represented by the momentum deguxes brvbar t and frac14 t and the at-a-distance forcesie the momentum sources b0 and bt (see macrgure 3) Consequently the material versionof the volume-specimacrc balance of momentum sometimes also referred to as `Cauchyrsquosmacrrst law of motionrsquo can be expressed as
Dtp0 = Div brvbar t + b0 (43)
In honour of the work of Piola in 1833 and Kirchhoreg in 1852 the momentum degux brvbar t
is typically referred to as the macrrst PiolaKirchhoreg stress tensor in classical continuummechanics With the help of the well-known Piola transforms
p0 = Jpt b0 = Jbt brvbar t = J frac14 t cent F iexclt (44)
the individual terms of equation (43) can be pushed forward to the spatial conmacrgu-ration The corresponding momentum degux frac14 t is commonly denoted as the Cauchystress tensor in standard continuum mechanics commemorating the early work ofCauchy in 1823 The application of Reynoldsrsquos transport theorem (211)
jDtp0 = dtpt + div(pt laquo v) (45)
yields the spatial version of the balance of momentum
dtpt + div(pt laquo v) = div frac14 t + bt (46)
which is typically applied in classical deguid mechanics The overall degux term frac14 t iexclpt laquo v redegects the convective nature of the above equation through the transport oflinear momentum pt laquo v In summary we distinguish between the material and thespatial version of the volume-specimacrc balance of momentum
Dtp0 = Div brvbar t + b0 dtpt + div(pt laquo v) = div frac14 t + bt (47)
On the Neumann boundary characterized through the material and spatial normalN and n the normal projections of the momentum deguxes of PiolaKirchhoreg andCauchy type brvbar t and frac14 t are required to be in equilibrium with the correspondingclosed- and open-system stress-vector contributions tclos ed
0 or tclos edt and top en
0 ortop en
t respectively
brvbar t cent N = tclos ed0 + t op en
0 top en0 = sup1t op en
0 + [p laquo R] cent N
frac14 t cent n = tclos edt + t op en
t top ent = sup1t op en
t + [p laquo r] cent n
)
(48)
Correspondingly the momentum sources terms b0 and bt can be understood as thesum of the closed- and the open-system volumeforce contributions bclos ed
0 or bclos edt
and bop en0 or bop en
t
b0 = bclos ed0 + bop en
0 bop en0 = sup1bop en
0 + pR0 iexcl rXp cent R
bt = bclos edt + bop en
t bop ent = sup1bop en
t + pRt iexcl rxp cent r
)
(49)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2555
While the expressions in terms of R r R0 and Rt take into account the part ofthe newly created or indegowing mass that carries the same amount of mass-specimacrcmomentum p as the original substrate the additional terms sup1t op en
0 sup1t op ent sup1b op en
0 andsup1b op en
t account for a possible diregerence in the momentum density
Remark 41 (balance of angular momentum) The volume-specimacrc angular-momentum density l0 or lt is demacrned through the vector product of the correspondinglinear momentum density p0 or pt with a distance vector a = rsquo iexcl rsquo0 from a macrxedpoint rsquo0 in space
l0 = a pound p0 lt = a pound pt (410)
In the absence of distributed couples and internal rotational degrees of freedom thevolume-specimacrc balance of angular momentum for open systems can be derived bytaking the vector product of the volume-specimacrc momentum balance (47) with thedistance vector a
a pound Dtp0 = a pound Div brvbar t + a pound b0 (411)
With the demacrnition of the angular momentum (410) the above equation can berewritten as
Dtl0 = Div(a pound brvbar t) + a pound b0 iexcl F pound brvbar t (412)
Thereby the vector product of the two second-order tensors iexcl F pound brvbar t can beexpressed in terms of the axial vector of the related second-order tensor [F cent brvbar ]axlas iexcl F pound brvbar t = 2[F cent brvbar ]axl It proves convenient for later purposes to reformulate theabove statement in terms of the reduced momentum degux sup1brvbar t = brvbar t iexcl p laquo R andthe reduced momentum source sup1b0 = b0 iexcl pR0 + rXp cent R
Dtl0 = Div(a pound [ sup1brvbar t +p laquoR])+a pound [sup1b0 +pR0 iexcl rXp cent R] iexcl F pound [ sup1brvbar t +plaquoR] (413)
Herein the third term on the right-hand side
iexcl F pound [ sup1brvbar t + p laquo R] = 2[F cent [ sup1brvbar + R laquo p]]axl
represents the volume-specimacrc production of the angular momentum l0 Anticipatinglater considerations we would like to point out that assuming the symmetry of thereduced momentum degux F cent sup1brvbar = sup1brvbar t cent F t or equivalently sup1frac14 = sup1frac14 t the production ofangular momentum reduces to 2[F cent [R laquo p]]axl or 2[r laquo p]axl respectively
Remark 42 (balance of kinetic energy) Although the balance of kineticenergy does not constitute an independent balance law it proves signimacrcant to takea closer look at it since it will help to introduce work conjugate stress and strainmeasures Moreover the balance of kinetic energy will be used to identify the externaland internal mechanical power which are essential for our further thermodynamicalconsiderations The starting point is the material time derivative of the volume-specimacrc kinetic-energy density K0 = 1
2raquo 0v cent v
DtK0 = raquo 0 DtK + K Dt raquo 0 = p0 cent Dtv + K Dt raquo 0 = v cent Dtp0 iexcl K Dt raquo 0 (414)
With the projection of the volume-specimacrc balance of momentum (43) with the spa-tial velocity v and the balance of mass (35)1 weighted by the mass-specimacrc kinetic-energy density K
v cent Dtp0 = Div(v cent brvbar t) + v cent b0 iexcl rXv brvbar t
KDt raquo 0 = Div(KR) + KR0 iexcl rXK cent R
)
(415)
Proc R Soc Lond A (2003)
2556 E Kuhl and P Steinmann
equation (414) can be rewritten in the explicit form
DtK0 = Div(v cent brvbar t iexcl KR) + v cent b0 iexcl KR0 + rXK cent R iexcl brvbar t DtF (416)
In what follows it will prove convenient to reformulate the above equation in terms ofthe reduced momentum degux sup1brvbar t = brvbar t iexcl p laquo R and the reduced momentum sourcesup1b0 = b0 iexcl pR0 + rXp cent R which can be related to their overall counterparts brvbar t andb0 through the following identities
Div(v cent brvbar t) = Div(v cent sup1brvbar t) + Div(2KR)
v cent b0 = v cent sup1b0 + 2KR0 iexcl v cent rXp cent R
brvbar t DtF = sup1brvbar t DtF + p cent rXv cent R
9gtgt=
gtgt(417)
With the help of the above equations and the identity v cent rX p + p cent rXv = 2rXKfollowing from v cent p = 2K equation (416) can be reformulated in the following way
DtK0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R iexcl sup1brvbar t DtF (418)
As stated by Stokes in 1857 the rate of change of the kinetic energy is equal to theexternal mechanical power minus the internal mechanical power Consequently theright-hand side of the above equation enables the identimacrcation of the volume-specimacrcexternal and internal mechanical power pext
0 and pin t0
pext0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R
pin t0 = sup1brvbar t DtF
)(419)
whereby pext0 characterizes the total rate of working of mechanical actions on the
body This rate of working consists of the degux contribution v cent sup1brvbar t + KR and thesource term v cent sup1b0 + KR0 iexcl rXK cent R The internal mechanical power pin t
0 consistsexclusively of the production term for the kinetic energy as sup1brvbar t DtF The demacrnitionof the latter suggests the interpretation of the reduced momentum degux sup1brvbar t and thematerial time derivative of the deformation gradient DtF as work conjugate pairsWith the above abbreviations at hand the balance of kinetic energy can be rewrittenin a form which has been denoted as the local form the `theorem of energyrsquo by Maugin(1993)
DtK0 = pext0 iexcl pin t
0 dtKt + div(Ktv) = pextt iexcl pin t
t (420)
The spatial version of the balance of kinetic energy (420)2 follows naturally byapplying the appropriate Piola transforms K0 = JKt
pext0 = Jpext
t and pin t0 = Jpin t
t along with Reynoldsrsquos transport theorem (211)
(b) Mass-specimacrc version
The mass-specimacrc version of the balance of momentum is based on the mass-specimacrckinetic-energy density
K = 12v cent v (421)
demacrning the quantity to be balanced as its partial derivative with respect to thespatial velocity v
p = v K = v (422)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2557
The rate of change of the mass-specimacrc momentum density p ie the covariant spatialvelocity is balanced with the reduced momentum deguxes sup1brvbar t or sup1frac14 t and the reducedmomentum sources sup1b0 or sup1bt By subtracting the balance of mass (35) weighted bythe momentum density p from the volume-specimacrc momentum balance (47) we canderive the diregerent versions of the mass-specimacrc momentum balance
raquo 0Dtp = Div sup1brvbar t + sup1b0 raquo t dtp + raquo tv cent rxp = div sup1frac14 t + sup1bt (423)
The reduced momentum deguxes sup1brvbar t and sup1frac14 t which are related to the overall momen-tum deguxes brvbar t and frac14 t through sup1brvbar t = brvbar t iexcl p laquo R and sup1frac14 t = frac14 t iexcl p laquo r are deter-mined by the closed- and open-system stress-vector contributions tclos ed
0 and sup1t op en0
or tclos edt and sup1t op en
t respectively on the Neumann boundary
sup1brvbar t cent N = tclos ed0 + sup1t op en
0
sup1frac14 t cent n = tclos edt + sup1t op en
t
)(424)
while the reduced momentum sources sup1b0 and sup1bt are given as the sum of the classicalclosed-system volume force contributions bclos ed
0 or bclos edt and the reduced open-
system contributions sup1b op en0 or sup1b op en
t
sup1b0 = bclos ed0 + sup1bop en
0
sup1bt = bclos edt + sup1bop en
t
)(425)
Note that the mass-specimacrc momentum balance (423) is free from all the explicitextra terms caused by the changes in mass The indeguence of the open system mani-fests itself only implicitly through the prescribed boundary terms sup1t op en
0 and sup1t op ent and
the prescribed volume sources sup1b op en0 and sup1b op en
t The convective indeguence introducedthrough the raquo tv cent rxp term however is also present in the closed-system case
Remark 43 (balance of angular momentum) The mass-specimacrc angular-momentum density l is given as the vector product of the mass-specimacrc momentumdensity p with the distance vector a = rsquo iexcl rsquo0
l = a pound p (426)
Consequently the mass-specimacrc version of the balance of angular momentum followsfrom the vector product of the mass-specimacrc momentum balance (423) with thedistance vector a
a pound raquo 0Dtp = a pound Div sup1brvbar t + a pound sup1b0 (427)
By making use of the demacrnition (426) the above equation can be rewritten as
raquo 0Dtl = Div(a pound sup1brvbar t) + a pound sup1b0 iexcl F pound sup1brvbar t (428)
Again the third term on the right-hand side iexcl F pound sup1brvbar t = 2[F cent sup1brvbar ]axl representsthe production of the mass-specimacrc angular momentum l If we require the balanceof angular momentum to represent an individual independent statement
raquo 0Dtl = Div(a pound sup1brvbar t) + a pound sup1b0 (429)
this production term has to vanish identically This condition thus reveals the sym-metry requirements
F cent sup1brvbar = sup1brvbar t cent F t sup1frac14 = sup1frac14 t (430)
Proc R Soc Lond A (2003)
2558 E Kuhl and P Steinmann
The material and the spatial versions (430)1 and (430)2 respectively are relatedthrough the corresponding Piola transform sup1brvbar t = J sup1frac14 t cent F iexclt A comparison of thevolume-specimacrc statement (413) with its mass-specimacrc counterpart (429) indicatesthat the in- or outdegux of mass R or r produces an additional amount of angularmomentum unless
F cent R laquo p = p laquo R cent F t r laquo p = p laquo r (431)
ie the mass degux F centR or r is constitutively demacrned to be coaxial to the mass-specimacrcmomentum density p
Remark 44 (balance of kinetic energy) To investigate the mass-specimacrc ver-sion of the balance of kinetic energy we need to evaluate the material time derivativeof the mass-specimacrc kinetic-energy density K = 1
2v centv which can easily be derived by
subtracting the weighted balance of mass (415)2 from the material time derivativeof the volume-specimacrc kinetic-energy density K0 given in equation (418) as
raquo 0 DtK = DtK0 iexcl K Dt raquo 0 (432)
and thusraquo 0 DtK = Div(v cent sup1brvbar t) + v cent sup1bext
0 iexcl sup1brvbar t DtF (433)
Consequently we can identify the mass-specimacrc external and internal mechanicalpower sup1pext
0 and sup1pin t0 respectively
sup1pext0 = pext
0 iexcl KDt raquo 0 = Div(v cent sup1brvbar t) + v cent sup1b0
sup1pin t0 = pin t
0 = sup1brvbar t DtF
)(434)
It is worth noting that the diregerence of the mass- and volume-specimacrc formu-lation manifests itself only in the demacrnition of the external mechanical powersup1pext
0 = pext0 iexcl KDt raquo 0 while the mass-specimacrc internal power is identical to its volume-
specimacrc counterpart as sup1pin t0 = pin t
0 Consequently the material and the spatial versionof the mass-specimacrc balance of kinetic energy take the formats
raquo 0 DtK = sup1pext0 iexcl sup1pin t
0 raquo t dtK + raquo tv cent rxK = sup1pextt iexcl sup1pin t
t (435)
whereby both formulations are related through the corresponding Piola transformswith sup1pext
0 = J sup1pextt and sup1pin t
0 = Jsup1pin tt and the Euler theorem (24)
5 Balance of energy
The balance of total energy as a representation of the macrrst law of thermodynamicsbalances the rate of change of the volume-specimacrc total energy density E0 or Et asthe sum of the kinetic and internal energy density E0 = K0 + I0 or Et = Kt + It
with the external power In classical continuum mechanics of closed systems thisexternal power is composed of a purely mechanical contribution pext
0 or pextt and a
non-mechanical thermal contribution qext0 or qext
t Therefore the balance of energy issometimes referred to as the `principle of interconvertibility of heat and mechanicalworkrsquo a notion which was known to Carnot in 1832 and experimentally verimacredby Joule in 1843 However when dealing with open systems we have to generalizethe demacrnition of the non-mechanical external power by including additional externalopen-system contributions in the demacrnition of qext
0 and qextt (cf Malvern 1969 x 54)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2559
rsquo
F J DtF
B0 Bt
E0
v cent brvbar t Q
v cent b0 Q0
Et
v cent frac14 t q
v cent bt Qt
Figure 4 Balance of energy energy densities deg uxes and sources
(a) Volume-specimacrc version
For the spatial-motion problem the rate of change of the volume-specimacrc totalenergy density E0 = raquo 0E can be expressed in the form (cf macrgure 4)
DtE0 = Div(v cent sup1brvbar t iexcl sup1Q + ER) + v cent sup1b0 + sup1Q0 + ER0 iexcl rXE cent R (51)
Thereby in addition to the purely mechanical external power pext0 demacrned in equa-
tion (419) we have included the non-mechanical external power qext0 accounting
for the classical thermal eregects of the closed system and the additional open-systemeregects as an additional non-mechanical supply of energy
qext0 = Div( iexcl Q) + Q0 (52)
Similar to the mechanical power the non-mechanical power consists of a degux and asource contribution denoted by Q and Q0 respectively The former is composed ofthe reduced outward non-mechanical energy degux sup1Q modimacred by the explicit extradegux due to the open system IR while the latter is the sum of the reduced non-mechanical energy source sup1Q0 enhanced by the explicit eregects of the open systemIR0 and rXI cent R
pext0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R
qext0 = Div( iexcl sup1Q + IR) + sup1Q0 + IR0 iexcl rXI cent R
)
(53)
Equation (51) can thus be reformulated in the concise form
DtE0 = pext0 + qext
0 dtEt + div(Etv) = pextt + qext
t (54)
which for the classical closed-system case dates back to the early works of Duhem in1892 Again the spatial version (54)2 follows from the appropriate Piola transformsE0 = JEt
pext0 = Jpext
t qext0 = Jqext
t Q = Jq cent F iexclt and sup1Q = J sup1q cent F iexclt along withReynoldsrsquos transport theorem (211) The demacrnition of the non-mechanical energydeguxes Q and q parallels the introduction of the macrrst PiolaKirchhoreg stress tensorbrvbar and the Cauchy stress frac14 On the Neumann boundary the non-mechanical energydeguxes Q and q are given in terms of the normal projection of the classical heat deguxdensities qclos ed
0 and qclos edt and the additional open-system contributions qop en
0 andqop en
t Q cent N = qclos ed
0 + qop en0 qop en
0 = sup1q op en0 iexcl IR cent N
q cent n = qclos edt + qop en
t qop ent = sup1q op en
t iexcl Ir cent n
)(55)
Proc R Soc Lond A (2003)
2560 E Kuhl and P Steinmann
Moreover the non-mechanical energy sources Q0 and Qt can be understood as thesum of the classical heat source Qclos ed
0 and Qclos edt and an additional non-mechanical
energy source taking into account the nature of the open system Qop en0 and Qop en
t
Q0 = Qclos ed0 + Qop en
0 Qop en0 = sup1Qop en
0 + IR0 iexcl rXI cent R
Qt = Qclos edt + Qop en
t Qop ent = sup1Qop en
t + IRt iexcl rxI cent r
)(56)
In formal analogy to the demacrnition of the momentum quantities the expressions interms of R r R0 and Rt take into account the part of the newly added mass thatcarries the same amount of non-mechanical energy as the original substrate while theadditional open-system terms sup1q op en
0 sup1q op ent sup1Qop en
0 and sup1Qop ent account for a possible
diregerence in non-mechanical energy
Remark 51 (balance of internal energy) For further thermodynamical con-siderations it proves convenient to consider the volume-specimacrc internal energy den-sity I0 = E0 iexcl K0 or It = Et iexcl Kt given as the diregerence of the corresponding totalenergy density and the kinetic-energy density Consequently the two versions of thebalance of internal energy follow from subtracting the balance of kinetic energy (420)from the total energy balance (54)
DtI0 = pin t0 + qext
0 dtIt + div(Itv) = pin tt + qext
t (57)
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the equations derived above balances the mass-specimacrc energy density E = E0=raquo 0 with the mass-specimacrc external mechanical powersup1pext
0 introduced in (434) and the mass-specimacrc non-mechanical power sup1qext0 as
sup1qext0 = qext
0 iexcl IDt raquo 0 = iexcl Div sup1Q + sup1Q0 (58)
The corresponding balance equations
raquo 0 DtE = sup1pext0 + sup1qext
0 raquo t dtE + raquo tv cent rxE = sup1pextt + sup1qext
t (59)
follow from subtracting the corresponding balance of mass (35) weighted by the totalenergy E from the volume-specimacrc energy balance (54) The spatial version (59)2can be derived by applying the corresponding Piola transforms with sup1pext
0 = Jsup1pextt and
sup1qext0 = J sup1qext
t and the Euler theorem (24) Again we can relate the reduced energydeguxes sup1Q and sup1q demacrned through sup1Q = Q iexcl IR and sup1q = q iexcl Ir to the classical heatdegux qclos ed
0 or qclos edt and the energy degux caused by additional eregects of the open
system sup1q op en0 and sup1q op en
t
sup1Q cent N = qclos ed0 + sup1q op en
0
sup1q cent n = qclos edt + sup1q op en
t
)(510)
Moreover the reduced non-mechanical energy sources sup1Q0 and sup1Qt are given as the sumof the classical heat source of a closed system Qclos ed
0 and Qclos edt and the additional
open-system contribution to the energy sup1Qop en0 and sup1Qop en
t
sup1Q0 = Qclos ed0 + sup1Qop en
0
sup1Qt = Qclos edt + sup1Qop en
t
)(511)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2561
Again as opposed to the formulation developed by Epstein amp Maugin (2000) themass-specimacrc format is free from all the explicit extra terms caused by changes inmass and thus resembles the balance of energy known from classical mechanics
Remark 52 (balance of internal energy) A reduction to the balance ofinternal energy I = E iexcl K follows from subtracting the balance of kinetic energy(435) from the balance of total energy (59)
raquo 0 DtI = sup1pin t0 + sup1qext
0 raquo t dtI + raquo tv cent rxI = sup1pin tt + sup1qext
t (512)
6 Balance of entropy
The macrrst law of thermodynamics in the form of the balance of energy expressesthe interconvertibility of heat and work However the balance of energy itself doesnot place any restrictions on the direction of the thermodynamical process Thesecond law of thermodynamics the balance of entropy postulates the existence ofan absolute temperature and of a specimacrc entropy as a state function Through theinternal production of the latter which is required to either vanish for reversibleprocesses or be strictly positive for irreversible processes a direction is imposedon the thermodynamical process Recall that when dealing with open systems amacrxed material volume B0 is allowed to constantly gain or lose mass Open systemsnaturally exhibit an additional entropy degux and entropy source caused by the addedmass as pointed out earlier in the famous monograph by Schrodinger (1944 x 6) aswell as by Malvern (1969 x 56) or also recently by Epstein amp Maugin (2000) Theindeguence of changes in mass on the entropy is twofold On the one hand it is redegectedthrough the explicit open-system entropy degux SR and the related source terms SR0
and iexcl rXS cent R On the other hand we will introduce the reduced entropy degux andsource sup1H and sup1H0 respectively which in turn split into the extra non-mechanicalenergy terms sup1Q and sup1Q0 divided by the absolute temperature sup3 and an extra entropydegux and source S and S0 While the former parallel the introduction of the entropydegux and source in classical closed-system thermodynamics the contributions S andS0 account for the diregerence in entropy of the added mass and the original substrate
Remark 61 (balance of entropy versus entropy inequality) In the relatedliterature the entropy is often introduced through the entropy inequality For thesake of analogy we will treat the entropy as a balance quantity in the followingIts evolution is thus balanced with the sum of the external and internal entropyproduction whereby the latter is constrained to be non-negative throughout In thecase of closed-system thermodynamics this approach has been followed for exampleby Truesdell amp Toupin (1960 xx 256 and 257) Haupt (2000 x 33) or Liu (2002 x 5)
(a) Volume-specimacrc version
The balance of entropy balances the volume-specimacrc entropy density S0 = raquo 0S withthe external entropy input hext
0 and the internal entropy production hin t0 Thereby
the former consists of the entropy degux H across the material surface B0 and theentropy source H0 in the material domain B0 (cf macrgure 5)
hext0 = Div( iexcl H ) + H0 (61)
Proc R Soc Lond A (2003)
2562 E Kuhl and P Steinmann
rsquo
F J DtF
B0 Bt
S0
H S
H0 S0
St
h s
Ht St
Figure 5 Balance of entropy entropy densities deg uxes and sources
The external entropy degux H is introduced as the sum of the reduced external entropydegux sup1H enhanced by the explicit open-system contribution SR Accordingly theexternal entropy source H0 consists of the reduced entropy source sup1H0 modimacred byadditional terms SR0 and iexcl rXS cent R accounting for the explicit open-system con-tribution to the entropy supply
hext0 = Div( iexcl sup1H + SR) + sup1H0 + SR0 iexcl rXS cent R
hin t0 gt 0
)(62)
Just like in classical thermodynamics of closed systems the internal entropy produc-tion hin t
0 is required to be point-wise non-negative The balance of entropy can thusbe expressed in the following form
DtS0 = hext0 + hin t
0 dtSt + div(Stv) = hextt + hin t
t (63)
Again the material and the spatial version are related through the correspond-ing Piola transforms S0 = JSt
hext0 = Jhext
t hin t0 = Jhin t
t H = Jh cent F iexclt andsup1H = J sup1h cent F iexclt in combination with Reynoldsrsquos transport theorem Note that alter-
natively the balance of entropy which is primarily nothing but a formal demacrnitionof the entropy production can be recast into the inequality DtS0 iexcl hext
0 gt 0 Thiscondition which is typically referred to as `postulate of irreversibilityrsquo in classicalthermodynamics (see Truesdell amp Toupin 1960 x 258) induces a direction to thethermodynamic process Next we will introduce Neumann boundary conditions forthe spatial-motion Kirchhoreg and Cauchy type entropy degux H and h in terms of theclassical closed-system entropy degux contribution hclos ed
0 or hclos edt and the additional
open-system contribution hop en0 or hop en
t
H cent N = hclos ed0 + hop en
0 hop en0 = sup1hop en
0 iexcl SR cent N
h cent n = hclos edt + hop en
t hop ent = sup1hop en
t iexcl Sr cent n
)
(64)
Accordingly the entropy sources H0 and Ht are introduced as the sum of the classicalentropy source of the closed system Hclos ed
0 or Hclos edt and the additional entropy
source accounting for the nature of the open system Hop en0 or Hop en
t
H0 = Hclos ed0 + Hop en
0 Hop en0 = sup1Hop en
0 + SR0 iexcl rXS cent R
Ht = Hclos edt + Hop en
t Hop ent = sup1Hop en
t + SRt iexcl rxS cent r
)
(65)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2563
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the above equations states that the rate of changeof the mass-specimacrc entropy S = S0=raquo 0 is in equilibrium with the mass-specimacrcexternal entropy input sup1hext
0 and the mass-specimacrc internal entropy production sup1hin t0
which are introduced in the following way
sup1hext0 = hext
0 iexcl SDt raquo 0 = iexcl Div sup1H + sup1H0
sup1hin t0 = hin t
0 gt 0
)
(66)
The resulting material and spatial version of the balance of entropy
raquo 0 DtS = sup1hext0 + sup1hin t
0 raquo t dtS + raquo tv cent rxS = sup1hextt + sup1hin t
t (67)
which can be derived by subtracting S times the balance of mass (35) from thevolume-specimacrc balance of entropy (63) are related via the appropriate Piola trans-forms sup1hext
0 = Jsup1hextt and sup1hin t
0 = Jsup1hin tt and the Euler theorem (24) Moreover we can
relate the reduced entropy deguxes sup1H and sup1h demacrned through sup1H = H iexcl SR andsup1h = h iexcl Sr to the classical entropy degux of the closed system hclos ed
0 or hclos edt and
the entropy degux caused by additional eregects of the open system sup1hop en0 or sup1hop en
t
sup1H cent N = hclos ed0 + sup1hop en
0
sup1h cent n = hclos edt + sup1hop en
t
)(68)
Accordingly the reduced entropy sources sup1H0 = H0 iexcl SR0 + rXS cent R and sup1Ht = Ht iexclSRt + rxS cent r are given as the sum of the classical closed-system entropy sourceHclos ed
0 or Hclos edt and the additional open-system contribution to the entropy source
sup1Hop en0 or sup1Hop en
t sup1H0 = Hclos ed
0 + sup1Hop en0
sup1Ht = Hclos edt + sup1Hop en
t
)
(69)
Remark 62 (dissipation inequality) For further elaboration it proves con-venient to set up relations between the reduced entropy degux sup1H and the reducednon-mechanical energy degux sup1Q and between the reduced entropy source sup1H0 and thereduced non-mechanical energy source sup1Q0 in terms of the absolute temperature sup3 an extra entropy degux S and an extra entropy source S0
sup1H =1sup3
sup1Q + S sup1H0 =1sup3
sup1Q0 + S0 (610)
The above equations can be understood as a generalization of the ideas of Cowinamp Hegedus (1976) who have suggested including the additional entropy source S0
accounting for changes in entropy caused by changes in mass that are not consideredimplicitly through the changes in energy sup1Q0 Both the additional entropy degux S andthe entropy source S0 which we shall summarize in the term s
0 = iexcl Div S + S0 inthe following have to be determined constitutively These additional terms can beunderstood as an explicit representation of the exchange of entropy with the `outsideworldrsquo We now turn to the evaluation of the above-stated second law of thermo-dynamics by recasting it into an appropriate form of the dissipation inequality astatement that places further restrictions on the form of the constitutive response
Proc R Soc Lond A (2003)
2564 E Kuhl and P Steinmann
functions For this purpose we shall interpret the internal entropy production sup1hin t0 as
a measure for the degree of irreversibility introducing the dissipation rate sup1d0 as the
internal entropy production weighted by the absolute temperature as sup1d0 = sup3 sup1hin t
0 gt 0With the help of the balance of entropy (67)1 the relations (610) and the bal-ance of internal energy (512)1 the dissipation rate can be reformulated to yield theClausiusDuhem inequality in an internal energy based fashion
sup1d0 = sup1pin t
0 iexcl raquo 0Dt[I iexcl sup3 S ] iexcl raquo 0S Dt sup3 iexcl s0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (611)
By making use of the appropriate LegendreFenchel transform introducing theHelmholtz free energy ordf = I iexcl sup3 S we end up with the classical free-energy-basedversion of the ClausiusDuhem inequality
sup1d0 = sup1brvbar t DtF iexcl raquo 0 Dt ordf iexcl raquo 0S Dt sup3 iexcl s
0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (612)
which is particularly useful when the temperature sup3 rather than the entropy S isused as the independent variable In classical thermodynamics the ClausiusDuheminequality (612) is typically decomposed into a local and a conductive contributionsup1d loc
0 and sup1dcon0
sup1d loc0 = sup1brvbar t DtF iexcl raquo 0Dt ordf iexcl raquo 0SDt sup3 iexcl s
0 sup3 gt 0 sup1d con0 = iexcl sup1Q cent rX ln sup3 gt 0 (613)
whereby the local term sup1d loc0 gt 0 represents the ClausiusPlanck inequality for open
systems while the remaining conductive term sup1dcon0 gt 0 is typically referred to as a
Fourier inequality As a suplusmncient condition for sup1d0 gt 0 both inequalities are required
to hold separately In what follows we shall apply the dissipation inequality (613) toderive constitutive equations for the reduced momentum degux sup1brvbar t and the entropy SIn addition the evaluation of the dissipation inequality places further restrictions onthe extra entropy exchange s
0 The underlying procedure will be highlighted in detailfor the simple model problem of thermo-hyperelasticity in the following section
Remark 63 Note that at this stage the introduction of the reduced entropydegux and source sup1H = sup1Q=sup3 + S and sup1H0 = sup1Q0=sup3 + S0 as introduced in equations(610) is a mere constitutive assumption Nevertheless for particular constitutive-model problems the postulated relations can be verimacred through the evaluation ofthe dissipation inequality according to Muller (1973) and Liu (1972) (see also Liu2002) It will turn out that in most cases equations (610) are justimacred with thetrivial solution S = 0 and S0 = 0 However assuming this result from the veryoutset might be too restrictive for complex constitutive models as also pointed outby Epstein amp Maugin (2000)
7 Thermo-hyperelasticity
We are now in a position to exploit the second law of thermodynamics in the formof the ClausiusDuhem inequality along the lines of Coleman amp Noll (1963) Thestraightforward evaluation of the local part of the dissipation inequality in the formof the ClausiusPlanck inequality (613)1 will result in the demacrnition of the reducedmomentum degux sup1brvbar and the mass-specimacrc entropy density S Its conductive sup-plement (613)2 the Fourier inequality suggests the demacrnition of the reduced non-mechanical energy degux sup1Q along the lines of the classical linear heat conduction intro-duced by Fourier in 1822 Finally the mass degux R will be introduced constitutively
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2565
in the context of classical linear mass diregusion according to Fickrsquos law Here wewill thus restrict ourselves to a thermo-hyperelastic-model problem for which all thedissipation is caused exclusively by heat conduction and possibly by an additionalopen-system contribution of the `outside worldrsquo In what follows we shall make useof the multiplicative decomposition of the free energy ordf 0
ordf 0 = raquo 0 ordf (71)
Thereby the mass-specimacrc free-energy density ordf is expressed in terms of the materialdensity raquo 0 the deformation gradient F and the absolute temperature sup3 with a pos-sible explicit dependence on the material placement X Within the thermodynamicsof open systems the material density raquo 0 is allowed to vary in space and time is thusintroduced as function of the material placement X and the time t
ordf = ordf ( raquo 0 F sup3 X) raquo 0 = raquo 0(X t) (72)
Consequently the material time derivative of the free-energy density is formally givenin the form
Dt ordf = D raquo 0ordf Dt raquo 0 + DF ordf DtF + D sup3 ordf Dt sup3 (73)
The evaluation of the ClausiusPlanck inequality (613)1
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 + [ sup1brvbar t iexcl raquo 0DF ordf ] DtF iexcl [ raquo 0S + raquo 0 D sup3 ordf ] Dt sup3 iexcl s0 sup3 gt 0 (74)
demacrnes the reduced macrrst PiolaKirchhoreg stress tensor sup1brvbar t and the mass-specimacrcentropy S as thermodynamically conjugate variables to the deformation gradientF and the absolute temperature sup3
sup1brvbar t = raquo 0 DF ordf S = iexcl D sup3 ordf (75)
As in Cowin amp Hegedus (1976) we are left with a reduced inequality of the form
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 iexcl s0 sup3 gt 0 (76)
In biomechanics the simplest choice for the free-energy function ordf for cellular mate-rials such as open-pored biological tissues is based on the classical isotropic Neo-Hookean-type free-energy function weighted by the actual relative density [ raquo 0=raquo curren
0]n
(see for example Carter amp Hayes 1977 Gibson amp Ashby 1997)
ordf =middot
raquo 0
raquo curren0
cedil[niexcl1] 1raquo curren
0
[12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]] (77)
Here para and middot denote the classical Lamparae constants and n is an additional exponentusually allowed to vary between 1 6 n 6 35 A selection of more advanced free-energy functions for orthotropic biological tissues can be found for example in therecent collection of publications by Cowin amp Humphrey (2001) The derivatives of thefree energy ordf with respect to the material density raquo 0 and the deformation gradientF take the format
D raquo 0ordf = [n iexcl 1]
middotraquo 0
raquo curren0
cedil[niexcl2]middot 1raquo curren
0
cedil2
[ 12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]]
DF ordf =middot
raquo 0
raquo curren0
cedil[niexcl1]middot 1raquo curren
0
cedil[ middot F + [ para ln J iexcl middot ]F iexclt]
9gtgtgtgt=
gtgtgtgt
(78)
Proc R Soc Lond A (2003)
2566 E Kuhl and P Steinmann
whereby the macrrst derivative can alternatively be expressed as D raquo 0ordf = [n iexcl 1] ordf =raquo 0
According to equation (75) the reduced macrrst PiolaKirchhoreg stress tensor
sup1brvbar t =middot
raquo 0
raquo curren0
cediln
[ middot F + [ para ln J iexcl middot ]F iexclt] (79)
can be understood as the classical Neo-Hookean stress tensor weighted by the actualrelative density [ raquo 0=raquo curren
0]n The reduced dissipation inequality
iexcl [n iexcl 1] ordf [Div R + R0] + sup3 [Div S iexcl S0] gt 0 (710)
places implicit restrictions on the dissipation generated by the density evolution Dt raquo 0
through the mass degux R and the mass source R0 This amount of dissipation hasat least to be compensated by an appropriate constitutive assumption for the extraexternal entropy input s
0 through the extra entropy degux S and the extra entropysource S0 eg
S = [n iexcl 1] ordf1sup3
R S0 = iexcl [n iexcl 1] ordf1sup3
R0 (711)
Similar to the context of chemomechanics the degux r or R is usually related to thespatial or material gradient of the density rx raquo 0 or rX raquo 0 as
r = R0b cent rx raquo 0 R = rtB cent rX raquo 0 (712)
in analogy to Fickrsquos law for concentrations Here R0 and rt denote the mass-conduction coeplusmncient introducing either a materially or a spatially isotropicresponse In the context of biomechanics we typically macrnd variations of the con-stitutive equation
R0 =middot
raquo 0
raquo curren0
cediliexclm
ordf 0 iexcl ordf curren0 (713)
for the mass source R0 where raquo curren0 and ordf curren
0 denote the reference density and the refer-ence free energy respectively while m is an additional exponent that is commonlychosen to m gt n (see Harrigan amp Hamilton 1993) Finally the evaluation of theFourier inequality (613)2 as sup1d con
0 = iexcl sup1Q cent rX ln sup3 gt 0 suggests the demacrnition of themass-specimacrc non-mechanical energy degux sup1q or sup1Q according to Fourierrsquos law as
sup1q = iexcl K0b cent rx sup3 sup1Q = iexcl ktB cent rX sup3 (714)
with K0 and kt denoting the materially or spatially isotropic conductivity In order toa priori guarantee the satisfaction of the Fourier inequality (613)2 the conductivityis required to be non-negative K0 gt 0 and kt gt 0
8 Conclusion
We have presented a general framework for the thermodynamics of open systemsThe derived macreld equations are believed to be particularly useful in biomechanicalor chemomechanical applications where attention is conmacrned to one individual sub-system of the overall matter present Due to the fact that this open subsystem isallowed to constantly gain or lose mass the balance of mass had to be enhancedby additional surface and volume terms redegecting the interaction with the `outsideworldrsquo Since the newly created mass carries a particular amount of momentum
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2567
energy and entropy all the other balance equations had to be reformulated as wellTo clarify the indeguence of the changes in mass we have introduced the notions of`volume-specimacrcrsquo and `mass-specimacrcrsquo formats The former accounts for the total indegu-ence of the changes in mass through explicit mass-dependent and additional implicitopen-system contributions The latter however is free from all the mass-dependentextra terms and thus takes the familiar structure known from classical continuumthermodynamics The mass-specimacrc format is believed to be particularly useful sinceit parallels the framework of the closed-system case Consequently permissible con-stitutive relations can be derived from the mass-specimacrc version of the dissipationinequality The underlying procedure has been illustrated for the model problem ofthermo-hyperelasticity
References
Bowen R M 1976 Theory of mixtures In Continuum physics vol III Mixtures and EM macreldtheories (ed A C Eringen) pp 1127 Academic
Carter D R amp Hayes W C 1977 The behavior of bone as a two-phase porous structure JBone Joint Surg Am 59 785794
Coleman B D amp Noll W 1963 The thermodynamics of elastic materials with heat conductionand viscosity Arch Ration Mech Analysis 13 167178
Cowin S C amp Hegedus D H 1976 Bone remodelling I Theory of adaptive elasticity JElastic 6 313326
Cowin S C amp Humphrey J D 2001 Cardiovascular soft tissue mechanics Dordrecht Kluwer
de Boer R 2000 Theory of porous media Springer
Diebels S 2000 Mikropolare Zweiphasenmodelle Formulierung auf der Basis der TheoriePoroser Medien Habilitationsschrift Bericht aus dem Institut fur Mechanik (Bauwesen)Nr II-4 Universitat Stuttgart
Ehlers W 2002 Foundations of multiphasic and porous materials In Porous media theoryexperiments and numerical applications (ed W Ehlers amp J Bluhm) pp 386 Springer
Epstein M amp Maugin G A 2000 Thermomechanics of volumetric growth in uniform bodiesInt J Plasticity 16 951978
Gibson L J amp Ashby M F 1997 The mechanics of three-dimensional cellular materials ProcR Soc Lond A 382 4359
Goldstein H 1950 Classical mechanics Addison-Wesley
Harrigan T P amp Hamilton J J 1993 Finite element simulation of adaptive bone remodellinga stability criterion and a time-stepping method Int J Numer Meth Engng 36 837854
Haupt P 2000 Continuum mechanics and theory of materials Springer
Humphrey J D 2002 Cardiovasular solid mechanics Springer
Humphrey J D amp Rajagopal K R 2002 A constrained mixture model for growth and remod-eling of soft tissues Math Models Meth Appl Sci 12 407430
Liu I S 1972 Method of Lagrange multipliers for exploitation of the entropy principle ArchRation Mech Analysis 46 131148
Liu I S 2002 Continuum mechanics Springer
Malvern L E 1969 Introduction to the mechanics of a continuous medium Englewood Clireg sNJ Prentice Hall
Maugin G A 1993 Material inhomogenities in elasticity London Chapman amp Hall
Maugin G A 1999 The thermomechanics of nonlinear irreversible behaviors World Scientimacrc
Muller I 1973 Thermodynamik die Grundlagen der Materialtheorie Dusseldorf BertelsmannUniversitatsverlag
Proc R Soc Lond A (2003)
2568 E Kuhl and P Steinmann
Muller I 1994 Grundzuge der Thermodynamik Springer
Runesson K 1978 On nonlinear consolidation of soft clay PhD thesis Department of StructuralMechanics Chalmers University of Technology Goteborg Sweden
Schrodinger E 1944 What is life Cambridge University Press
Taber L A 1995 Biomechanics of growth remodeling and morphogenesis Appl Mech Rev48 487545
Truesdell C amp Toupin R 1960 The classical macreld theories In Handbuch der Physik (edS Flugge) vol 3 Springer
Wu T Hutter K amp Svendsen B 1998 On shear deg ow of a saturated icesediment mixture withthermodynamic equilibrium pressure and momentum exchange Proc R Soc Lond A 4547188
Proc R Soc Lond A (2003)

Thermodynamics for open systems 2555
While the expressions in terms of R r R0 and Rt take into account the part ofthe newly created or indegowing mass that carries the same amount of mass-specimacrcmomentum p as the original substrate the additional terms sup1t op en
0 sup1t op ent sup1b op en
0 andsup1b op en
t account for a possible diregerence in the momentum density
Remark 41 (balance of angular momentum) The volume-specimacrc angular-momentum density l0 or lt is demacrned through the vector product of the correspondinglinear momentum density p0 or pt with a distance vector a = rsquo iexcl rsquo0 from a macrxedpoint rsquo0 in space
l0 = a pound p0 lt = a pound pt (410)
In the absence of distributed couples and internal rotational degrees of freedom thevolume-specimacrc balance of angular momentum for open systems can be derived bytaking the vector product of the volume-specimacrc momentum balance (47) with thedistance vector a
a pound Dtp0 = a pound Div brvbar t + a pound b0 (411)
With the demacrnition of the angular momentum (410) the above equation can berewritten as
Dtl0 = Div(a pound brvbar t) + a pound b0 iexcl F pound brvbar t (412)
Thereby the vector product of the two second-order tensors iexcl F pound brvbar t can beexpressed in terms of the axial vector of the related second-order tensor [F cent brvbar ]axlas iexcl F pound brvbar t = 2[F cent brvbar ]axl It proves convenient for later purposes to reformulate theabove statement in terms of the reduced momentum degux sup1brvbar t = brvbar t iexcl p laquo R andthe reduced momentum source sup1b0 = b0 iexcl pR0 + rXp cent R
Dtl0 = Div(a pound [ sup1brvbar t +p laquoR])+a pound [sup1b0 +pR0 iexcl rXp cent R] iexcl F pound [ sup1brvbar t +plaquoR] (413)
Herein the third term on the right-hand side
iexcl F pound [ sup1brvbar t + p laquo R] = 2[F cent [ sup1brvbar + R laquo p]]axl
represents the volume-specimacrc production of the angular momentum l0 Anticipatinglater considerations we would like to point out that assuming the symmetry of thereduced momentum degux F cent sup1brvbar = sup1brvbar t cent F t or equivalently sup1frac14 = sup1frac14 t the production ofangular momentum reduces to 2[F cent [R laquo p]]axl or 2[r laquo p]axl respectively
Remark 42 (balance of kinetic energy) Although the balance of kineticenergy does not constitute an independent balance law it proves signimacrcant to takea closer look at it since it will help to introduce work conjugate stress and strainmeasures Moreover the balance of kinetic energy will be used to identify the externaland internal mechanical power which are essential for our further thermodynamicalconsiderations The starting point is the material time derivative of the volume-specimacrc kinetic-energy density K0 = 1
2raquo 0v cent v
DtK0 = raquo 0 DtK + K Dt raquo 0 = p0 cent Dtv + K Dt raquo 0 = v cent Dtp0 iexcl K Dt raquo 0 (414)
With the projection of the volume-specimacrc balance of momentum (43) with the spa-tial velocity v and the balance of mass (35)1 weighted by the mass-specimacrc kinetic-energy density K
v cent Dtp0 = Div(v cent brvbar t) + v cent b0 iexcl rXv brvbar t
KDt raquo 0 = Div(KR) + KR0 iexcl rXK cent R
)
(415)
Proc R Soc Lond A (2003)
2556 E Kuhl and P Steinmann
equation (414) can be rewritten in the explicit form
DtK0 = Div(v cent brvbar t iexcl KR) + v cent b0 iexcl KR0 + rXK cent R iexcl brvbar t DtF (416)
In what follows it will prove convenient to reformulate the above equation in terms ofthe reduced momentum degux sup1brvbar t = brvbar t iexcl p laquo R and the reduced momentum sourcesup1b0 = b0 iexcl pR0 + rXp cent R which can be related to their overall counterparts brvbar t andb0 through the following identities
Div(v cent brvbar t) = Div(v cent sup1brvbar t) + Div(2KR)
v cent b0 = v cent sup1b0 + 2KR0 iexcl v cent rXp cent R
brvbar t DtF = sup1brvbar t DtF + p cent rXv cent R
9gtgt=
gtgt(417)
With the help of the above equations and the identity v cent rX p + p cent rXv = 2rXKfollowing from v cent p = 2K equation (416) can be reformulated in the following way
DtK0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R iexcl sup1brvbar t DtF (418)
As stated by Stokes in 1857 the rate of change of the kinetic energy is equal to theexternal mechanical power minus the internal mechanical power Consequently theright-hand side of the above equation enables the identimacrcation of the volume-specimacrcexternal and internal mechanical power pext
0 and pin t0
pext0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R
pin t0 = sup1brvbar t DtF
)(419)
whereby pext0 characterizes the total rate of working of mechanical actions on the
body This rate of working consists of the degux contribution v cent sup1brvbar t + KR and thesource term v cent sup1b0 + KR0 iexcl rXK cent R The internal mechanical power pin t
0 consistsexclusively of the production term for the kinetic energy as sup1brvbar t DtF The demacrnitionof the latter suggests the interpretation of the reduced momentum degux sup1brvbar t and thematerial time derivative of the deformation gradient DtF as work conjugate pairsWith the above abbreviations at hand the balance of kinetic energy can be rewrittenin a form which has been denoted as the local form the `theorem of energyrsquo by Maugin(1993)
DtK0 = pext0 iexcl pin t
0 dtKt + div(Ktv) = pextt iexcl pin t
t (420)
The spatial version of the balance of kinetic energy (420)2 follows naturally byapplying the appropriate Piola transforms K0 = JKt
pext0 = Jpext
t and pin t0 = Jpin t
t along with Reynoldsrsquos transport theorem (211)
(b) Mass-specimacrc version
The mass-specimacrc version of the balance of momentum is based on the mass-specimacrckinetic-energy density
K = 12v cent v (421)
demacrning the quantity to be balanced as its partial derivative with respect to thespatial velocity v
p = v K = v (422)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2557
The rate of change of the mass-specimacrc momentum density p ie the covariant spatialvelocity is balanced with the reduced momentum deguxes sup1brvbar t or sup1frac14 t and the reducedmomentum sources sup1b0 or sup1bt By subtracting the balance of mass (35) weighted bythe momentum density p from the volume-specimacrc momentum balance (47) we canderive the diregerent versions of the mass-specimacrc momentum balance
raquo 0Dtp = Div sup1brvbar t + sup1b0 raquo t dtp + raquo tv cent rxp = div sup1frac14 t + sup1bt (423)
The reduced momentum deguxes sup1brvbar t and sup1frac14 t which are related to the overall momen-tum deguxes brvbar t and frac14 t through sup1brvbar t = brvbar t iexcl p laquo R and sup1frac14 t = frac14 t iexcl p laquo r are deter-mined by the closed- and open-system stress-vector contributions tclos ed
0 and sup1t op en0
or tclos edt and sup1t op en
t respectively on the Neumann boundary
sup1brvbar t cent N = tclos ed0 + sup1t op en
0
sup1frac14 t cent n = tclos edt + sup1t op en
t
)(424)
while the reduced momentum sources sup1b0 and sup1bt are given as the sum of the classicalclosed-system volume force contributions bclos ed
0 or bclos edt and the reduced open-
system contributions sup1b op en0 or sup1b op en
t
sup1b0 = bclos ed0 + sup1bop en
0
sup1bt = bclos edt + sup1bop en
t
)(425)
Note that the mass-specimacrc momentum balance (423) is free from all the explicitextra terms caused by the changes in mass The indeguence of the open system mani-fests itself only implicitly through the prescribed boundary terms sup1t op en
0 and sup1t op ent and
the prescribed volume sources sup1b op en0 and sup1b op en
t The convective indeguence introducedthrough the raquo tv cent rxp term however is also present in the closed-system case
Remark 43 (balance of angular momentum) The mass-specimacrc angular-momentum density l is given as the vector product of the mass-specimacrc momentumdensity p with the distance vector a = rsquo iexcl rsquo0
l = a pound p (426)
Consequently the mass-specimacrc version of the balance of angular momentum followsfrom the vector product of the mass-specimacrc momentum balance (423) with thedistance vector a
a pound raquo 0Dtp = a pound Div sup1brvbar t + a pound sup1b0 (427)
By making use of the demacrnition (426) the above equation can be rewritten as
raquo 0Dtl = Div(a pound sup1brvbar t) + a pound sup1b0 iexcl F pound sup1brvbar t (428)
Again the third term on the right-hand side iexcl F pound sup1brvbar t = 2[F cent sup1brvbar ]axl representsthe production of the mass-specimacrc angular momentum l If we require the balanceof angular momentum to represent an individual independent statement
raquo 0Dtl = Div(a pound sup1brvbar t) + a pound sup1b0 (429)
this production term has to vanish identically This condition thus reveals the sym-metry requirements
F cent sup1brvbar = sup1brvbar t cent F t sup1frac14 = sup1frac14 t (430)
Proc R Soc Lond A (2003)
2558 E Kuhl and P Steinmann
The material and the spatial versions (430)1 and (430)2 respectively are relatedthrough the corresponding Piola transform sup1brvbar t = J sup1frac14 t cent F iexclt A comparison of thevolume-specimacrc statement (413) with its mass-specimacrc counterpart (429) indicatesthat the in- or outdegux of mass R or r produces an additional amount of angularmomentum unless
F cent R laquo p = p laquo R cent F t r laquo p = p laquo r (431)
ie the mass degux F centR or r is constitutively demacrned to be coaxial to the mass-specimacrcmomentum density p
Remark 44 (balance of kinetic energy) To investigate the mass-specimacrc ver-sion of the balance of kinetic energy we need to evaluate the material time derivativeof the mass-specimacrc kinetic-energy density K = 1
2v centv which can easily be derived by
subtracting the weighted balance of mass (415)2 from the material time derivativeof the volume-specimacrc kinetic-energy density K0 given in equation (418) as
raquo 0 DtK = DtK0 iexcl K Dt raquo 0 (432)
and thusraquo 0 DtK = Div(v cent sup1brvbar t) + v cent sup1bext
0 iexcl sup1brvbar t DtF (433)
Consequently we can identify the mass-specimacrc external and internal mechanicalpower sup1pext
0 and sup1pin t0 respectively
sup1pext0 = pext
0 iexcl KDt raquo 0 = Div(v cent sup1brvbar t) + v cent sup1b0
sup1pin t0 = pin t
0 = sup1brvbar t DtF
)(434)
It is worth noting that the diregerence of the mass- and volume-specimacrc formu-lation manifests itself only in the demacrnition of the external mechanical powersup1pext
0 = pext0 iexcl KDt raquo 0 while the mass-specimacrc internal power is identical to its volume-
specimacrc counterpart as sup1pin t0 = pin t
0 Consequently the material and the spatial versionof the mass-specimacrc balance of kinetic energy take the formats
raquo 0 DtK = sup1pext0 iexcl sup1pin t
0 raquo t dtK + raquo tv cent rxK = sup1pextt iexcl sup1pin t
t (435)
whereby both formulations are related through the corresponding Piola transformswith sup1pext
0 = J sup1pextt and sup1pin t
0 = Jsup1pin tt and the Euler theorem (24)
5 Balance of energy
The balance of total energy as a representation of the macrrst law of thermodynamicsbalances the rate of change of the volume-specimacrc total energy density E0 or Et asthe sum of the kinetic and internal energy density E0 = K0 + I0 or Et = Kt + It
with the external power In classical continuum mechanics of closed systems thisexternal power is composed of a purely mechanical contribution pext
0 or pextt and a
non-mechanical thermal contribution qext0 or qext
t Therefore the balance of energy issometimes referred to as the `principle of interconvertibility of heat and mechanicalworkrsquo a notion which was known to Carnot in 1832 and experimentally verimacredby Joule in 1843 However when dealing with open systems we have to generalizethe demacrnition of the non-mechanical external power by including additional externalopen-system contributions in the demacrnition of qext
0 and qextt (cf Malvern 1969 x 54)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2559
rsquo
F J DtF
B0 Bt
E0
v cent brvbar t Q
v cent b0 Q0
Et
v cent frac14 t q
v cent bt Qt
Figure 4 Balance of energy energy densities deg uxes and sources
(a) Volume-specimacrc version
For the spatial-motion problem the rate of change of the volume-specimacrc totalenergy density E0 = raquo 0E can be expressed in the form (cf macrgure 4)
DtE0 = Div(v cent sup1brvbar t iexcl sup1Q + ER) + v cent sup1b0 + sup1Q0 + ER0 iexcl rXE cent R (51)
Thereby in addition to the purely mechanical external power pext0 demacrned in equa-
tion (419) we have included the non-mechanical external power qext0 accounting
for the classical thermal eregects of the closed system and the additional open-systemeregects as an additional non-mechanical supply of energy
qext0 = Div( iexcl Q) + Q0 (52)
Similar to the mechanical power the non-mechanical power consists of a degux and asource contribution denoted by Q and Q0 respectively The former is composed ofthe reduced outward non-mechanical energy degux sup1Q modimacred by the explicit extradegux due to the open system IR while the latter is the sum of the reduced non-mechanical energy source sup1Q0 enhanced by the explicit eregects of the open systemIR0 and rXI cent R
pext0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R
qext0 = Div( iexcl sup1Q + IR) + sup1Q0 + IR0 iexcl rXI cent R
)
(53)
Equation (51) can thus be reformulated in the concise form
DtE0 = pext0 + qext
0 dtEt + div(Etv) = pextt + qext
t (54)
which for the classical closed-system case dates back to the early works of Duhem in1892 Again the spatial version (54)2 follows from the appropriate Piola transformsE0 = JEt
pext0 = Jpext
t qext0 = Jqext
t Q = Jq cent F iexclt and sup1Q = J sup1q cent F iexclt along withReynoldsrsquos transport theorem (211) The demacrnition of the non-mechanical energydeguxes Q and q parallels the introduction of the macrrst PiolaKirchhoreg stress tensorbrvbar and the Cauchy stress frac14 On the Neumann boundary the non-mechanical energydeguxes Q and q are given in terms of the normal projection of the classical heat deguxdensities qclos ed
0 and qclos edt and the additional open-system contributions qop en
0 andqop en
t Q cent N = qclos ed
0 + qop en0 qop en
0 = sup1q op en0 iexcl IR cent N
q cent n = qclos edt + qop en
t qop ent = sup1q op en
t iexcl Ir cent n
)(55)
Proc R Soc Lond A (2003)
2560 E Kuhl and P Steinmann
Moreover the non-mechanical energy sources Q0 and Qt can be understood as thesum of the classical heat source Qclos ed
0 and Qclos edt and an additional non-mechanical
energy source taking into account the nature of the open system Qop en0 and Qop en
t
Q0 = Qclos ed0 + Qop en
0 Qop en0 = sup1Qop en
0 + IR0 iexcl rXI cent R
Qt = Qclos edt + Qop en
t Qop ent = sup1Qop en
t + IRt iexcl rxI cent r
)(56)
In formal analogy to the demacrnition of the momentum quantities the expressions interms of R r R0 and Rt take into account the part of the newly added mass thatcarries the same amount of non-mechanical energy as the original substrate while theadditional open-system terms sup1q op en
0 sup1q op ent sup1Qop en
0 and sup1Qop ent account for a possible
diregerence in non-mechanical energy
Remark 51 (balance of internal energy) For further thermodynamical con-siderations it proves convenient to consider the volume-specimacrc internal energy den-sity I0 = E0 iexcl K0 or It = Et iexcl Kt given as the diregerence of the corresponding totalenergy density and the kinetic-energy density Consequently the two versions of thebalance of internal energy follow from subtracting the balance of kinetic energy (420)from the total energy balance (54)
DtI0 = pin t0 + qext
0 dtIt + div(Itv) = pin tt + qext
t (57)
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the equations derived above balances the mass-specimacrc energy density E = E0=raquo 0 with the mass-specimacrc external mechanical powersup1pext
0 introduced in (434) and the mass-specimacrc non-mechanical power sup1qext0 as
sup1qext0 = qext
0 iexcl IDt raquo 0 = iexcl Div sup1Q + sup1Q0 (58)
The corresponding balance equations
raquo 0 DtE = sup1pext0 + sup1qext
0 raquo t dtE + raquo tv cent rxE = sup1pextt + sup1qext
t (59)
follow from subtracting the corresponding balance of mass (35) weighted by the totalenergy E from the volume-specimacrc energy balance (54) The spatial version (59)2can be derived by applying the corresponding Piola transforms with sup1pext
0 = Jsup1pextt and
sup1qext0 = J sup1qext
t and the Euler theorem (24) Again we can relate the reduced energydeguxes sup1Q and sup1q demacrned through sup1Q = Q iexcl IR and sup1q = q iexcl Ir to the classical heatdegux qclos ed
0 or qclos edt and the energy degux caused by additional eregects of the open
system sup1q op en0 and sup1q op en
t
sup1Q cent N = qclos ed0 + sup1q op en
0
sup1q cent n = qclos edt + sup1q op en
t
)(510)
Moreover the reduced non-mechanical energy sources sup1Q0 and sup1Qt are given as the sumof the classical heat source of a closed system Qclos ed
0 and Qclos edt and the additional
open-system contribution to the energy sup1Qop en0 and sup1Qop en
t
sup1Q0 = Qclos ed0 + sup1Qop en
0
sup1Qt = Qclos edt + sup1Qop en
t
)(511)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2561
Again as opposed to the formulation developed by Epstein amp Maugin (2000) themass-specimacrc format is free from all the explicit extra terms caused by changes inmass and thus resembles the balance of energy known from classical mechanics
Remark 52 (balance of internal energy) A reduction to the balance ofinternal energy I = E iexcl K follows from subtracting the balance of kinetic energy(435) from the balance of total energy (59)
raquo 0 DtI = sup1pin t0 + sup1qext
0 raquo t dtI + raquo tv cent rxI = sup1pin tt + sup1qext
t (512)
6 Balance of entropy
The macrrst law of thermodynamics in the form of the balance of energy expressesthe interconvertibility of heat and work However the balance of energy itself doesnot place any restrictions on the direction of the thermodynamical process Thesecond law of thermodynamics the balance of entropy postulates the existence ofan absolute temperature and of a specimacrc entropy as a state function Through theinternal production of the latter which is required to either vanish for reversibleprocesses or be strictly positive for irreversible processes a direction is imposedon the thermodynamical process Recall that when dealing with open systems amacrxed material volume B0 is allowed to constantly gain or lose mass Open systemsnaturally exhibit an additional entropy degux and entropy source caused by the addedmass as pointed out earlier in the famous monograph by Schrodinger (1944 x 6) aswell as by Malvern (1969 x 56) or also recently by Epstein amp Maugin (2000) Theindeguence of changes in mass on the entropy is twofold On the one hand it is redegectedthrough the explicit open-system entropy degux SR and the related source terms SR0
and iexcl rXS cent R On the other hand we will introduce the reduced entropy degux andsource sup1H and sup1H0 respectively which in turn split into the extra non-mechanicalenergy terms sup1Q and sup1Q0 divided by the absolute temperature sup3 and an extra entropydegux and source S and S0 While the former parallel the introduction of the entropydegux and source in classical closed-system thermodynamics the contributions S andS0 account for the diregerence in entropy of the added mass and the original substrate
Remark 61 (balance of entropy versus entropy inequality) In the relatedliterature the entropy is often introduced through the entropy inequality For thesake of analogy we will treat the entropy as a balance quantity in the followingIts evolution is thus balanced with the sum of the external and internal entropyproduction whereby the latter is constrained to be non-negative throughout In thecase of closed-system thermodynamics this approach has been followed for exampleby Truesdell amp Toupin (1960 xx 256 and 257) Haupt (2000 x 33) or Liu (2002 x 5)
(a) Volume-specimacrc version
The balance of entropy balances the volume-specimacrc entropy density S0 = raquo 0S withthe external entropy input hext
0 and the internal entropy production hin t0 Thereby
the former consists of the entropy degux H across the material surface B0 and theentropy source H0 in the material domain B0 (cf macrgure 5)
hext0 = Div( iexcl H ) + H0 (61)
Proc R Soc Lond A (2003)
2562 E Kuhl and P Steinmann
rsquo
F J DtF
B0 Bt
S0
H S
H0 S0
St
h s
Ht St
Figure 5 Balance of entropy entropy densities deg uxes and sources
The external entropy degux H is introduced as the sum of the reduced external entropydegux sup1H enhanced by the explicit open-system contribution SR Accordingly theexternal entropy source H0 consists of the reduced entropy source sup1H0 modimacred byadditional terms SR0 and iexcl rXS cent R accounting for the explicit open-system con-tribution to the entropy supply
hext0 = Div( iexcl sup1H + SR) + sup1H0 + SR0 iexcl rXS cent R
hin t0 gt 0
)(62)
Just like in classical thermodynamics of closed systems the internal entropy produc-tion hin t
0 is required to be point-wise non-negative The balance of entropy can thusbe expressed in the following form
DtS0 = hext0 + hin t
0 dtSt + div(Stv) = hextt + hin t
t (63)
Again the material and the spatial version are related through the correspond-ing Piola transforms S0 = JSt
hext0 = Jhext
t hin t0 = Jhin t
t H = Jh cent F iexclt andsup1H = J sup1h cent F iexclt in combination with Reynoldsrsquos transport theorem Note that alter-
natively the balance of entropy which is primarily nothing but a formal demacrnitionof the entropy production can be recast into the inequality DtS0 iexcl hext
0 gt 0 Thiscondition which is typically referred to as `postulate of irreversibilityrsquo in classicalthermodynamics (see Truesdell amp Toupin 1960 x 258) induces a direction to thethermodynamic process Next we will introduce Neumann boundary conditions forthe spatial-motion Kirchhoreg and Cauchy type entropy degux H and h in terms of theclassical closed-system entropy degux contribution hclos ed
0 or hclos edt and the additional
open-system contribution hop en0 or hop en
t
H cent N = hclos ed0 + hop en
0 hop en0 = sup1hop en
0 iexcl SR cent N
h cent n = hclos edt + hop en
t hop ent = sup1hop en
t iexcl Sr cent n
)
(64)
Accordingly the entropy sources H0 and Ht are introduced as the sum of the classicalentropy source of the closed system Hclos ed
0 or Hclos edt and the additional entropy
source accounting for the nature of the open system Hop en0 or Hop en
t
H0 = Hclos ed0 + Hop en
0 Hop en0 = sup1Hop en
0 + SR0 iexcl rXS cent R
Ht = Hclos edt + Hop en
t Hop ent = sup1Hop en
t + SRt iexcl rxS cent r
)
(65)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2563
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the above equations states that the rate of changeof the mass-specimacrc entropy S = S0=raquo 0 is in equilibrium with the mass-specimacrcexternal entropy input sup1hext
0 and the mass-specimacrc internal entropy production sup1hin t0
which are introduced in the following way
sup1hext0 = hext
0 iexcl SDt raquo 0 = iexcl Div sup1H + sup1H0
sup1hin t0 = hin t
0 gt 0
)
(66)
The resulting material and spatial version of the balance of entropy
raquo 0 DtS = sup1hext0 + sup1hin t
0 raquo t dtS + raquo tv cent rxS = sup1hextt + sup1hin t
t (67)
which can be derived by subtracting S times the balance of mass (35) from thevolume-specimacrc balance of entropy (63) are related via the appropriate Piola trans-forms sup1hext
0 = Jsup1hextt and sup1hin t
0 = Jsup1hin tt and the Euler theorem (24) Moreover we can
relate the reduced entropy deguxes sup1H and sup1h demacrned through sup1H = H iexcl SR andsup1h = h iexcl Sr to the classical entropy degux of the closed system hclos ed
0 or hclos edt and
the entropy degux caused by additional eregects of the open system sup1hop en0 or sup1hop en
t
sup1H cent N = hclos ed0 + sup1hop en
0
sup1h cent n = hclos edt + sup1hop en
t
)(68)
Accordingly the reduced entropy sources sup1H0 = H0 iexcl SR0 + rXS cent R and sup1Ht = Ht iexclSRt + rxS cent r are given as the sum of the classical closed-system entropy sourceHclos ed
0 or Hclos edt and the additional open-system contribution to the entropy source
sup1Hop en0 or sup1Hop en
t sup1H0 = Hclos ed
0 + sup1Hop en0
sup1Ht = Hclos edt + sup1Hop en
t
)
(69)
Remark 62 (dissipation inequality) For further elaboration it proves con-venient to set up relations between the reduced entropy degux sup1H and the reducednon-mechanical energy degux sup1Q and between the reduced entropy source sup1H0 and thereduced non-mechanical energy source sup1Q0 in terms of the absolute temperature sup3 an extra entropy degux S and an extra entropy source S0
sup1H =1sup3
sup1Q + S sup1H0 =1sup3
sup1Q0 + S0 (610)
The above equations can be understood as a generalization of the ideas of Cowinamp Hegedus (1976) who have suggested including the additional entropy source S0
accounting for changes in entropy caused by changes in mass that are not consideredimplicitly through the changes in energy sup1Q0 Both the additional entropy degux S andthe entropy source S0 which we shall summarize in the term s
0 = iexcl Div S + S0 inthe following have to be determined constitutively These additional terms can beunderstood as an explicit representation of the exchange of entropy with the `outsideworldrsquo We now turn to the evaluation of the above-stated second law of thermo-dynamics by recasting it into an appropriate form of the dissipation inequality astatement that places further restrictions on the form of the constitutive response
Proc R Soc Lond A (2003)
2564 E Kuhl and P Steinmann
functions For this purpose we shall interpret the internal entropy production sup1hin t0 as
a measure for the degree of irreversibility introducing the dissipation rate sup1d0 as the
internal entropy production weighted by the absolute temperature as sup1d0 = sup3 sup1hin t
0 gt 0With the help of the balance of entropy (67)1 the relations (610) and the bal-ance of internal energy (512)1 the dissipation rate can be reformulated to yield theClausiusDuhem inequality in an internal energy based fashion
sup1d0 = sup1pin t
0 iexcl raquo 0Dt[I iexcl sup3 S ] iexcl raquo 0S Dt sup3 iexcl s0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (611)
By making use of the appropriate LegendreFenchel transform introducing theHelmholtz free energy ordf = I iexcl sup3 S we end up with the classical free-energy-basedversion of the ClausiusDuhem inequality
sup1d0 = sup1brvbar t DtF iexcl raquo 0 Dt ordf iexcl raquo 0S Dt sup3 iexcl s
0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (612)
which is particularly useful when the temperature sup3 rather than the entropy S isused as the independent variable In classical thermodynamics the ClausiusDuheminequality (612) is typically decomposed into a local and a conductive contributionsup1d loc
0 and sup1dcon0
sup1d loc0 = sup1brvbar t DtF iexcl raquo 0Dt ordf iexcl raquo 0SDt sup3 iexcl s
0 sup3 gt 0 sup1d con0 = iexcl sup1Q cent rX ln sup3 gt 0 (613)
whereby the local term sup1d loc0 gt 0 represents the ClausiusPlanck inequality for open
systems while the remaining conductive term sup1dcon0 gt 0 is typically referred to as a
Fourier inequality As a suplusmncient condition for sup1d0 gt 0 both inequalities are required
to hold separately In what follows we shall apply the dissipation inequality (613) toderive constitutive equations for the reduced momentum degux sup1brvbar t and the entropy SIn addition the evaluation of the dissipation inequality places further restrictions onthe extra entropy exchange s
0 The underlying procedure will be highlighted in detailfor the simple model problem of thermo-hyperelasticity in the following section
Remark 63 Note that at this stage the introduction of the reduced entropydegux and source sup1H = sup1Q=sup3 + S and sup1H0 = sup1Q0=sup3 + S0 as introduced in equations(610) is a mere constitutive assumption Nevertheless for particular constitutive-model problems the postulated relations can be verimacred through the evaluation ofthe dissipation inequality according to Muller (1973) and Liu (1972) (see also Liu2002) It will turn out that in most cases equations (610) are justimacred with thetrivial solution S = 0 and S0 = 0 However assuming this result from the veryoutset might be too restrictive for complex constitutive models as also pointed outby Epstein amp Maugin (2000)
7 Thermo-hyperelasticity
We are now in a position to exploit the second law of thermodynamics in the formof the ClausiusDuhem inequality along the lines of Coleman amp Noll (1963) Thestraightforward evaluation of the local part of the dissipation inequality in the formof the ClausiusPlanck inequality (613)1 will result in the demacrnition of the reducedmomentum degux sup1brvbar and the mass-specimacrc entropy density S Its conductive sup-plement (613)2 the Fourier inequality suggests the demacrnition of the reduced non-mechanical energy degux sup1Q along the lines of the classical linear heat conduction intro-duced by Fourier in 1822 Finally the mass degux R will be introduced constitutively
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2565
in the context of classical linear mass diregusion according to Fickrsquos law Here wewill thus restrict ourselves to a thermo-hyperelastic-model problem for which all thedissipation is caused exclusively by heat conduction and possibly by an additionalopen-system contribution of the `outside worldrsquo In what follows we shall make useof the multiplicative decomposition of the free energy ordf 0
ordf 0 = raquo 0 ordf (71)
Thereby the mass-specimacrc free-energy density ordf is expressed in terms of the materialdensity raquo 0 the deformation gradient F and the absolute temperature sup3 with a pos-sible explicit dependence on the material placement X Within the thermodynamicsof open systems the material density raquo 0 is allowed to vary in space and time is thusintroduced as function of the material placement X and the time t
ordf = ordf ( raquo 0 F sup3 X) raquo 0 = raquo 0(X t) (72)
Consequently the material time derivative of the free-energy density is formally givenin the form
Dt ordf = D raquo 0ordf Dt raquo 0 + DF ordf DtF + D sup3 ordf Dt sup3 (73)
The evaluation of the ClausiusPlanck inequality (613)1
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 + [ sup1brvbar t iexcl raquo 0DF ordf ] DtF iexcl [ raquo 0S + raquo 0 D sup3 ordf ] Dt sup3 iexcl s0 sup3 gt 0 (74)
demacrnes the reduced macrrst PiolaKirchhoreg stress tensor sup1brvbar t and the mass-specimacrcentropy S as thermodynamically conjugate variables to the deformation gradientF and the absolute temperature sup3
sup1brvbar t = raquo 0 DF ordf S = iexcl D sup3 ordf (75)
As in Cowin amp Hegedus (1976) we are left with a reduced inequality of the form
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 iexcl s0 sup3 gt 0 (76)
In biomechanics the simplest choice for the free-energy function ordf for cellular mate-rials such as open-pored biological tissues is based on the classical isotropic Neo-Hookean-type free-energy function weighted by the actual relative density [ raquo 0=raquo curren
0]n
(see for example Carter amp Hayes 1977 Gibson amp Ashby 1997)
ordf =middot
raquo 0
raquo curren0
cedil[niexcl1] 1raquo curren
0
[12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]] (77)
Here para and middot denote the classical Lamparae constants and n is an additional exponentusually allowed to vary between 1 6 n 6 35 A selection of more advanced free-energy functions for orthotropic biological tissues can be found for example in therecent collection of publications by Cowin amp Humphrey (2001) The derivatives of thefree energy ordf with respect to the material density raquo 0 and the deformation gradientF take the format
D raquo 0ordf = [n iexcl 1]
middotraquo 0
raquo curren0
cedil[niexcl2]middot 1raquo curren
0
cedil2
[ 12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]]
DF ordf =middot
raquo 0
raquo curren0
cedil[niexcl1]middot 1raquo curren
0
cedil[ middot F + [ para ln J iexcl middot ]F iexclt]
9gtgtgtgt=
gtgtgtgt
(78)
Proc R Soc Lond A (2003)
2566 E Kuhl and P Steinmann
whereby the macrrst derivative can alternatively be expressed as D raquo 0ordf = [n iexcl 1] ordf =raquo 0
According to equation (75) the reduced macrrst PiolaKirchhoreg stress tensor
sup1brvbar t =middot
raquo 0
raquo curren0
cediln
[ middot F + [ para ln J iexcl middot ]F iexclt] (79)
can be understood as the classical Neo-Hookean stress tensor weighted by the actualrelative density [ raquo 0=raquo curren
0]n The reduced dissipation inequality
iexcl [n iexcl 1] ordf [Div R + R0] + sup3 [Div S iexcl S0] gt 0 (710)
places implicit restrictions on the dissipation generated by the density evolution Dt raquo 0
through the mass degux R and the mass source R0 This amount of dissipation hasat least to be compensated by an appropriate constitutive assumption for the extraexternal entropy input s
0 through the extra entropy degux S and the extra entropysource S0 eg
S = [n iexcl 1] ordf1sup3
R S0 = iexcl [n iexcl 1] ordf1sup3
R0 (711)
Similar to the context of chemomechanics the degux r or R is usually related to thespatial or material gradient of the density rx raquo 0 or rX raquo 0 as
r = R0b cent rx raquo 0 R = rtB cent rX raquo 0 (712)
in analogy to Fickrsquos law for concentrations Here R0 and rt denote the mass-conduction coeplusmncient introducing either a materially or a spatially isotropicresponse In the context of biomechanics we typically macrnd variations of the con-stitutive equation
R0 =middot
raquo 0
raquo curren0
cediliexclm
ordf 0 iexcl ordf curren0 (713)
for the mass source R0 where raquo curren0 and ordf curren
0 denote the reference density and the refer-ence free energy respectively while m is an additional exponent that is commonlychosen to m gt n (see Harrigan amp Hamilton 1993) Finally the evaluation of theFourier inequality (613)2 as sup1d con
0 = iexcl sup1Q cent rX ln sup3 gt 0 suggests the demacrnition of themass-specimacrc non-mechanical energy degux sup1q or sup1Q according to Fourierrsquos law as
sup1q = iexcl K0b cent rx sup3 sup1Q = iexcl ktB cent rX sup3 (714)
with K0 and kt denoting the materially or spatially isotropic conductivity In order toa priori guarantee the satisfaction of the Fourier inequality (613)2 the conductivityis required to be non-negative K0 gt 0 and kt gt 0
8 Conclusion
We have presented a general framework for the thermodynamics of open systemsThe derived macreld equations are believed to be particularly useful in biomechanicalor chemomechanical applications where attention is conmacrned to one individual sub-system of the overall matter present Due to the fact that this open subsystem isallowed to constantly gain or lose mass the balance of mass had to be enhancedby additional surface and volume terms redegecting the interaction with the `outsideworldrsquo Since the newly created mass carries a particular amount of momentum
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2567
energy and entropy all the other balance equations had to be reformulated as wellTo clarify the indeguence of the changes in mass we have introduced the notions of`volume-specimacrcrsquo and `mass-specimacrcrsquo formats The former accounts for the total indegu-ence of the changes in mass through explicit mass-dependent and additional implicitopen-system contributions The latter however is free from all the mass-dependentextra terms and thus takes the familiar structure known from classical continuumthermodynamics The mass-specimacrc format is believed to be particularly useful sinceit parallels the framework of the closed-system case Consequently permissible con-stitutive relations can be derived from the mass-specimacrc version of the dissipationinequality The underlying procedure has been illustrated for the model problem ofthermo-hyperelasticity
References
Bowen R M 1976 Theory of mixtures In Continuum physics vol III Mixtures and EM macreldtheories (ed A C Eringen) pp 1127 Academic
Carter D R amp Hayes W C 1977 The behavior of bone as a two-phase porous structure JBone Joint Surg Am 59 785794
Coleman B D amp Noll W 1963 The thermodynamics of elastic materials with heat conductionand viscosity Arch Ration Mech Analysis 13 167178
Cowin S C amp Hegedus D H 1976 Bone remodelling I Theory of adaptive elasticity JElastic 6 313326
Cowin S C amp Humphrey J D 2001 Cardiovascular soft tissue mechanics Dordrecht Kluwer
de Boer R 2000 Theory of porous media Springer
Diebels S 2000 Mikropolare Zweiphasenmodelle Formulierung auf der Basis der TheoriePoroser Medien Habilitationsschrift Bericht aus dem Institut fur Mechanik (Bauwesen)Nr II-4 Universitat Stuttgart
Ehlers W 2002 Foundations of multiphasic and porous materials In Porous media theoryexperiments and numerical applications (ed W Ehlers amp J Bluhm) pp 386 Springer
Epstein M amp Maugin G A 2000 Thermomechanics of volumetric growth in uniform bodiesInt J Plasticity 16 951978
Gibson L J amp Ashby M F 1997 The mechanics of three-dimensional cellular materials ProcR Soc Lond A 382 4359
Goldstein H 1950 Classical mechanics Addison-Wesley
Harrigan T P amp Hamilton J J 1993 Finite element simulation of adaptive bone remodellinga stability criterion and a time-stepping method Int J Numer Meth Engng 36 837854
Haupt P 2000 Continuum mechanics and theory of materials Springer
Humphrey J D 2002 Cardiovasular solid mechanics Springer
Humphrey J D amp Rajagopal K R 2002 A constrained mixture model for growth and remod-eling of soft tissues Math Models Meth Appl Sci 12 407430
Liu I S 1972 Method of Lagrange multipliers for exploitation of the entropy principle ArchRation Mech Analysis 46 131148
Liu I S 2002 Continuum mechanics Springer
Malvern L E 1969 Introduction to the mechanics of a continuous medium Englewood Clireg sNJ Prentice Hall
Maugin G A 1993 Material inhomogenities in elasticity London Chapman amp Hall
Maugin G A 1999 The thermomechanics of nonlinear irreversible behaviors World Scientimacrc
Muller I 1973 Thermodynamik die Grundlagen der Materialtheorie Dusseldorf BertelsmannUniversitatsverlag
Proc R Soc Lond A (2003)
2568 E Kuhl and P Steinmann
Muller I 1994 Grundzuge der Thermodynamik Springer
Runesson K 1978 On nonlinear consolidation of soft clay PhD thesis Department of StructuralMechanics Chalmers University of Technology Goteborg Sweden
Schrodinger E 1944 What is life Cambridge University Press
Taber L A 1995 Biomechanics of growth remodeling and morphogenesis Appl Mech Rev48 487545
Truesdell C amp Toupin R 1960 The classical macreld theories In Handbuch der Physik (edS Flugge) vol 3 Springer
Wu T Hutter K amp Svendsen B 1998 On shear deg ow of a saturated icesediment mixture withthermodynamic equilibrium pressure and momentum exchange Proc R Soc Lond A 4547188
Proc R Soc Lond A (2003)

2556 E Kuhl and P Steinmann
equation (414) can be rewritten in the explicit form
DtK0 = Div(v cent brvbar t iexcl KR) + v cent b0 iexcl KR0 + rXK cent R iexcl brvbar t DtF (416)
In what follows it will prove convenient to reformulate the above equation in terms ofthe reduced momentum degux sup1brvbar t = brvbar t iexcl p laquo R and the reduced momentum sourcesup1b0 = b0 iexcl pR0 + rXp cent R which can be related to their overall counterparts brvbar t andb0 through the following identities
Div(v cent brvbar t) = Div(v cent sup1brvbar t) + Div(2KR)
v cent b0 = v cent sup1b0 + 2KR0 iexcl v cent rXp cent R
brvbar t DtF = sup1brvbar t DtF + p cent rXv cent R
9gtgt=
gtgt(417)
With the help of the above equations and the identity v cent rX p + p cent rXv = 2rXKfollowing from v cent p = 2K equation (416) can be reformulated in the following way
DtK0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R iexcl sup1brvbar t DtF (418)
As stated by Stokes in 1857 the rate of change of the kinetic energy is equal to theexternal mechanical power minus the internal mechanical power Consequently theright-hand side of the above equation enables the identimacrcation of the volume-specimacrcexternal and internal mechanical power pext
0 and pin t0
pext0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R
pin t0 = sup1brvbar t DtF
)(419)
whereby pext0 characterizes the total rate of working of mechanical actions on the
body This rate of working consists of the degux contribution v cent sup1brvbar t + KR and thesource term v cent sup1b0 + KR0 iexcl rXK cent R The internal mechanical power pin t
0 consistsexclusively of the production term for the kinetic energy as sup1brvbar t DtF The demacrnitionof the latter suggests the interpretation of the reduced momentum degux sup1brvbar t and thematerial time derivative of the deformation gradient DtF as work conjugate pairsWith the above abbreviations at hand the balance of kinetic energy can be rewrittenin a form which has been denoted as the local form the `theorem of energyrsquo by Maugin(1993)
DtK0 = pext0 iexcl pin t
0 dtKt + div(Ktv) = pextt iexcl pin t
t (420)
The spatial version of the balance of kinetic energy (420)2 follows naturally byapplying the appropriate Piola transforms K0 = JKt
pext0 = Jpext
t and pin t0 = Jpin t
t along with Reynoldsrsquos transport theorem (211)
(b) Mass-specimacrc version
The mass-specimacrc version of the balance of momentum is based on the mass-specimacrckinetic-energy density
K = 12v cent v (421)
demacrning the quantity to be balanced as its partial derivative with respect to thespatial velocity v
p = v K = v (422)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2557
The rate of change of the mass-specimacrc momentum density p ie the covariant spatialvelocity is balanced with the reduced momentum deguxes sup1brvbar t or sup1frac14 t and the reducedmomentum sources sup1b0 or sup1bt By subtracting the balance of mass (35) weighted bythe momentum density p from the volume-specimacrc momentum balance (47) we canderive the diregerent versions of the mass-specimacrc momentum balance
raquo 0Dtp = Div sup1brvbar t + sup1b0 raquo t dtp + raquo tv cent rxp = div sup1frac14 t + sup1bt (423)
The reduced momentum deguxes sup1brvbar t and sup1frac14 t which are related to the overall momen-tum deguxes brvbar t and frac14 t through sup1brvbar t = brvbar t iexcl p laquo R and sup1frac14 t = frac14 t iexcl p laquo r are deter-mined by the closed- and open-system stress-vector contributions tclos ed
0 and sup1t op en0
or tclos edt and sup1t op en
t respectively on the Neumann boundary
sup1brvbar t cent N = tclos ed0 + sup1t op en
0
sup1frac14 t cent n = tclos edt + sup1t op en
t
)(424)
while the reduced momentum sources sup1b0 and sup1bt are given as the sum of the classicalclosed-system volume force contributions bclos ed
0 or bclos edt and the reduced open-
system contributions sup1b op en0 or sup1b op en
t
sup1b0 = bclos ed0 + sup1bop en
0
sup1bt = bclos edt + sup1bop en
t
)(425)
Note that the mass-specimacrc momentum balance (423) is free from all the explicitextra terms caused by the changes in mass The indeguence of the open system mani-fests itself only implicitly through the prescribed boundary terms sup1t op en
0 and sup1t op ent and
the prescribed volume sources sup1b op en0 and sup1b op en
t The convective indeguence introducedthrough the raquo tv cent rxp term however is also present in the closed-system case
Remark 43 (balance of angular momentum) The mass-specimacrc angular-momentum density l is given as the vector product of the mass-specimacrc momentumdensity p with the distance vector a = rsquo iexcl rsquo0
l = a pound p (426)
Consequently the mass-specimacrc version of the balance of angular momentum followsfrom the vector product of the mass-specimacrc momentum balance (423) with thedistance vector a
a pound raquo 0Dtp = a pound Div sup1brvbar t + a pound sup1b0 (427)
By making use of the demacrnition (426) the above equation can be rewritten as
raquo 0Dtl = Div(a pound sup1brvbar t) + a pound sup1b0 iexcl F pound sup1brvbar t (428)
Again the third term on the right-hand side iexcl F pound sup1brvbar t = 2[F cent sup1brvbar ]axl representsthe production of the mass-specimacrc angular momentum l If we require the balanceof angular momentum to represent an individual independent statement
raquo 0Dtl = Div(a pound sup1brvbar t) + a pound sup1b0 (429)
this production term has to vanish identically This condition thus reveals the sym-metry requirements
F cent sup1brvbar = sup1brvbar t cent F t sup1frac14 = sup1frac14 t (430)
Proc R Soc Lond A (2003)
2558 E Kuhl and P Steinmann
The material and the spatial versions (430)1 and (430)2 respectively are relatedthrough the corresponding Piola transform sup1brvbar t = J sup1frac14 t cent F iexclt A comparison of thevolume-specimacrc statement (413) with its mass-specimacrc counterpart (429) indicatesthat the in- or outdegux of mass R or r produces an additional amount of angularmomentum unless
F cent R laquo p = p laquo R cent F t r laquo p = p laquo r (431)
ie the mass degux F centR or r is constitutively demacrned to be coaxial to the mass-specimacrcmomentum density p
Remark 44 (balance of kinetic energy) To investigate the mass-specimacrc ver-sion of the balance of kinetic energy we need to evaluate the material time derivativeof the mass-specimacrc kinetic-energy density K = 1
2v centv which can easily be derived by
subtracting the weighted balance of mass (415)2 from the material time derivativeof the volume-specimacrc kinetic-energy density K0 given in equation (418) as
raquo 0 DtK = DtK0 iexcl K Dt raquo 0 (432)
and thusraquo 0 DtK = Div(v cent sup1brvbar t) + v cent sup1bext
0 iexcl sup1brvbar t DtF (433)
Consequently we can identify the mass-specimacrc external and internal mechanicalpower sup1pext
0 and sup1pin t0 respectively
sup1pext0 = pext
0 iexcl KDt raquo 0 = Div(v cent sup1brvbar t) + v cent sup1b0
sup1pin t0 = pin t
0 = sup1brvbar t DtF
)(434)
It is worth noting that the diregerence of the mass- and volume-specimacrc formu-lation manifests itself only in the demacrnition of the external mechanical powersup1pext
0 = pext0 iexcl KDt raquo 0 while the mass-specimacrc internal power is identical to its volume-
specimacrc counterpart as sup1pin t0 = pin t
0 Consequently the material and the spatial versionof the mass-specimacrc balance of kinetic energy take the formats
raquo 0 DtK = sup1pext0 iexcl sup1pin t
0 raquo t dtK + raquo tv cent rxK = sup1pextt iexcl sup1pin t
t (435)
whereby both formulations are related through the corresponding Piola transformswith sup1pext
0 = J sup1pextt and sup1pin t
0 = Jsup1pin tt and the Euler theorem (24)
5 Balance of energy
The balance of total energy as a representation of the macrrst law of thermodynamicsbalances the rate of change of the volume-specimacrc total energy density E0 or Et asthe sum of the kinetic and internal energy density E0 = K0 + I0 or Et = Kt + It
with the external power In classical continuum mechanics of closed systems thisexternal power is composed of a purely mechanical contribution pext
0 or pextt and a
non-mechanical thermal contribution qext0 or qext
t Therefore the balance of energy issometimes referred to as the `principle of interconvertibility of heat and mechanicalworkrsquo a notion which was known to Carnot in 1832 and experimentally verimacredby Joule in 1843 However when dealing with open systems we have to generalizethe demacrnition of the non-mechanical external power by including additional externalopen-system contributions in the demacrnition of qext
0 and qextt (cf Malvern 1969 x 54)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2559
rsquo
F J DtF
B0 Bt
E0
v cent brvbar t Q
v cent b0 Q0
Et
v cent frac14 t q
v cent bt Qt
Figure 4 Balance of energy energy densities deg uxes and sources
(a) Volume-specimacrc version
For the spatial-motion problem the rate of change of the volume-specimacrc totalenergy density E0 = raquo 0E can be expressed in the form (cf macrgure 4)
DtE0 = Div(v cent sup1brvbar t iexcl sup1Q + ER) + v cent sup1b0 + sup1Q0 + ER0 iexcl rXE cent R (51)
Thereby in addition to the purely mechanical external power pext0 demacrned in equa-
tion (419) we have included the non-mechanical external power qext0 accounting
for the classical thermal eregects of the closed system and the additional open-systemeregects as an additional non-mechanical supply of energy
qext0 = Div( iexcl Q) + Q0 (52)
Similar to the mechanical power the non-mechanical power consists of a degux and asource contribution denoted by Q and Q0 respectively The former is composed ofthe reduced outward non-mechanical energy degux sup1Q modimacred by the explicit extradegux due to the open system IR while the latter is the sum of the reduced non-mechanical energy source sup1Q0 enhanced by the explicit eregects of the open systemIR0 and rXI cent R
pext0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R
qext0 = Div( iexcl sup1Q + IR) + sup1Q0 + IR0 iexcl rXI cent R
)
(53)
Equation (51) can thus be reformulated in the concise form
DtE0 = pext0 + qext
0 dtEt + div(Etv) = pextt + qext
t (54)
which for the classical closed-system case dates back to the early works of Duhem in1892 Again the spatial version (54)2 follows from the appropriate Piola transformsE0 = JEt
pext0 = Jpext
t qext0 = Jqext
t Q = Jq cent F iexclt and sup1Q = J sup1q cent F iexclt along withReynoldsrsquos transport theorem (211) The demacrnition of the non-mechanical energydeguxes Q and q parallels the introduction of the macrrst PiolaKirchhoreg stress tensorbrvbar and the Cauchy stress frac14 On the Neumann boundary the non-mechanical energydeguxes Q and q are given in terms of the normal projection of the classical heat deguxdensities qclos ed
0 and qclos edt and the additional open-system contributions qop en
0 andqop en
t Q cent N = qclos ed
0 + qop en0 qop en
0 = sup1q op en0 iexcl IR cent N
q cent n = qclos edt + qop en
t qop ent = sup1q op en
t iexcl Ir cent n
)(55)
Proc R Soc Lond A (2003)
2560 E Kuhl and P Steinmann
Moreover the non-mechanical energy sources Q0 and Qt can be understood as thesum of the classical heat source Qclos ed
0 and Qclos edt and an additional non-mechanical
energy source taking into account the nature of the open system Qop en0 and Qop en
t
Q0 = Qclos ed0 + Qop en
0 Qop en0 = sup1Qop en
0 + IR0 iexcl rXI cent R
Qt = Qclos edt + Qop en
t Qop ent = sup1Qop en
t + IRt iexcl rxI cent r
)(56)
In formal analogy to the demacrnition of the momentum quantities the expressions interms of R r R0 and Rt take into account the part of the newly added mass thatcarries the same amount of non-mechanical energy as the original substrate while theadditional open-system terms sup1q op en
0 sup1q op ent sup1Qop en
0 and sup1Qop ent account for a possible
diregerence in non-mechanical energy
Remark 51 (balance of internal energy) For further thermodynamical con-siderations it proves convenient to consider the volume-specimacrc internal energy den-sity I0 = E0 iexcl K0 or It = Et iexcl Kt given as the diregerence of the corresponding totalenergy density and the kinetic-energy density Consequently the two versions of thebalance of internal energy follow from subtracting the balance of kinetic energy (420)from the total energy balance (54)
DtI0 = pin t0 + qext
0 dtIt + div(Itv) = pin tt + qext
t (57)
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the equations derived above balances the mass-specimacrc energy density E = E0=raquo 0 with the mass-specimacrc external mechanical powersup1pext
0 introduced in (434) and the mass-specimacrc non-mechanical power sup1qext0 as
sup1qext0 = qext
0 iexcl IDt raquo 0 = iexcl Div sup1Q + sup1Q0 (58)
The corresponding balance equations
raquo 0 DtE = sup1pext0 + sup1qext
0 raquo t dtE + raquo tv cent rxE = sup1pextt + sup1qext
t (59)
follow from subtracting the corresponding balance of mass (35) weighted by the totalenergy E from the volume-specimacrc energy balance (54) The spatial version (59)2can be derived by applying the corresponding Piola transforms with sup1pext
0 = Jsup1pextt and
sup1qext0 = J sup1qext
t and the Euler theorem (24) Again we can relate the reduced energydeguxes sup1Q and sup1q demacrned through sup1Q = Q iexcl IR and sup1q = q iexcl Ir to the classical heatdegux qclos ed
0 or qclos edt and the energy degux caused by additional eregects of the open
system sup1q op en0 and sup1q op en
t
sup1Q cent N = qclos ed0 + sup1q op en
0
sup1q cent n = qclos edt + sup1q op en
t
)(510)
Moreover the reduced non-mechanical energy sources sup1Q0 and sup1Qt are given as the sumof the classical heat source of a closed system Qclos ed
0 and Qclos edt and the additional
open-system contribution to the energy sup1Qop en0 and sup1Qop en
t
sup1Q0 = Qclos ed0 + sup1Qop en
0
sup1Qt = Qclos edt + sup1Qop en
t
)(511)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2561
Again as opposed to the formulation developed by Epstein amp Maugin (2000) themass-specimacrc format is free from all the explicit extra terms caused by changes inmass and thus resembles the balance of energy known from classical mechanics
Remark 52 (balance of internal energy) A reduction to the balance ofinternal energy I = E iexcl K follows from subtracting the balance of kinetic energy(435) from the balance of total energy (59)
raquo 0 DtI = sup1pin t0 + sup1qext
0 raquo t dtI + raquo tv cent rxI = sup1pin tt + sup1qext
t (512)
6 Balance of entropy
The macrrst law of thermodynamics in the form of the balance of energy expressesthe interconvertibility of heat and work However the balance of energy itself doesnot place any restrictions on the direction of the thermodynamical process Thesecond law of thermodynamics the balance of entropy postulates the existence ofan absolute temperature and of a specimacrc entropy as a state function Through theinternal production of the latter which is required to either vanish for reversibleprocesses or be strictly positive for irreversible processes a direction is imposedon the thermodynamical process Recall that when dealing with open systems amacrxed material volume B0 is allowed to constantly gain or lose mass Open systemsnaturally exhibit an additional entropy degux and entropy source caused by the addedmass as pointed out earlier in the famous monograph by Schrodinger (1944 x 6) aswell as by Malvern (1969 x 56) or also recently by Epstein amp Maugin (2000) Theindeguence of changes in mass on the entropy is twofold On the one hand it is redegectedthrough the explicit open-system entropy degux SR and the related source terms SR0
and iexcl rXS cent R On the other hand we will introduce the reduced entropy degux andsource sup1H and sup1H0 respectively which in turn split into the extra non-mechanicalenergy terms sup1Q and sup1Q0 divided by the absolute temperature sup3 and an extra entropydegux and source S and S0 While the former parallel the introduction of the entropydegux and source in classical closed-system thermodynamics the contributions S andS0 account for the diregerence in entropy of the added mass and the original substrate
Remark 61 (balance of entropy versus entropy inequality) In the relatedliterature the entropy is often introduced through the entropy inequality For thesake of analogy we will treat the entropy as a balance quantity in the followingIts evolution is thus balanced with the sum of the external and internal entropyproduction whereby the latter is constrained to be non-negative throughout In thecase of closed-system thermodynamics this approach has been followed for exampleby Truesdell amp Toupin (1960 xx 256 and 257) Haupt (2000 x 33) or Liu (2002 x 5)
(a) Volume-specimacrc version
The balance of entropy balances the volume-specimacrc entropy density S0 = raquo 0S withthe external entropy input hext
0 and the internal entropy production hin t0 Thereby
the former consists of the entropy degux H across the material surface B0 and theentropy source H0 in the material domain B0 (cf macrgure 5)
hext0 = Div( iexcl H ) + H0 (61)
Proc R Soc Lond A (2003)
2562 E Kuhl and P Steinmann
rsquo
F J DtF
B0 Bt
S0
H S
H0 S0
St
h s
Ht St
Figure 5 Balance of entropy entropy densities deg uxes and sources
The external entropy degux H is introduced as the sum of the reduced external entropydegux sup1H enhanced by the explicit open-system contribution SR Accordingly theexternal entropy source H0 consists of the reduced entropy source sup1H0 modimacred byadditional terms SR0 and iexcl rXS cent R accounting for the explicit open-system con-tribution to the entropy supply
hext0 = Div( iexcl sup1H + SR) + sup1H0 + SR0 iexcl rXS cent R
hin t0 gt 0
)(62)
Just like in classical thermodynamics of closed systems the internal entropy produc-tion hin t
0 is required to be point-wise non-negative The balance of entropy can thusbe expressed in the following form
DtS0 = hext0 + hin t
0 dtSt + div(Stv) = hextt + hin t
t (63)
Again the material and the spatial version are related through the correspond-ing Piola transforms S0 = JSt
hext0 = Jhext
t hin t0 = Jhin t
t H = Jh cent F iexclt andsup1H = J sup1h cent F iexclt in combination with Reynoldsrsquos transport theorem Note that alter-
natively the balance of entropy which is primarily nothing but a formal demacrnitionof the entropy production can be recast into the inequality DtS0 iexcl hext
0 gt 0 Thiscondition which is typically referred to as `postulate of irreversibilityrsquo in classicalthermodynamics (see Truesdell amp Toupin 1960 x 258) induces a direction to thethermodynamic process Next we will introduce Neumann boundary conditions forthe spatial-motion Kirchhoreg and Cauchy type entropy degux H and h in terms of theclassical closed-system entropy degux contribution hclos ed
0 or hclos edt and the additional
open-system contribution hop en0 or hop en
t
H cent N = hclos ed0 + hop en
0 hop en0 = sup1hop en
0 iexcl SR cent N
h cent n = hclos edt + hop en
t hop ent = sup1hop en
t iexcl Sr cent n
)
(64)
Accordingly the entropy sources H0 and Ht are introduced as the sum of the classicalentropy source of the closed system Hclos ed
0 or Hclos edt and the additional entropy
source accounting for the nature of the open system Hop en0 or Hop en
t
H0 = Hclos ed0 + Hop en
0 Hop en0 = sup1Hop en
0 + SR0 iexcl rXS cent R
Ht = Hclos edt + Hop en
t Hop ent = sup1Hop en
t + SRt iexcl rxS cent r
)
(65)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2563
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the above equations states that the rate of changeof the mass-specimacrc entropy S = S0=raquo 0 is in equilibrium with the mass-specimacrcexternal entropy input sup1hext
0 and the mass-specimacrc internal entropy production sup1hin t0
which are introduced in the following way
sup1hext0 = hext
0 iexcl SDt raquo 0 = iexcl Div sup1H + sup1H0
sup1hin t0 = hin t
0 gt 0
)
(66)
The resulting material and spatial version of the balance of entropy
raquo 0 DtS = sup1hext0 + sup1hin t
0 raquo t dtS + raquo tv cent rxS = sup1hextt + sup1hin t
t (67)
which can be derived by subtracting S times the balance of mass (35) from thevolume-specimacrc balance of entropy (63) are related via the appropriate Piola trans-forms sup1hext
0 = Jsup1hextt and sup1hin t
0 = Jsup1hin tt and the Euler theorem (24) Moreover we can
relate the reduced entropy deguxes sup1H and sup1h demacrned through sup1H = H iexcl SR andsup1h = h iexcl Sr to the classical entropy degux of the closed system hclos ed
0 or hclos edt and
the entropy degux caused by additional eregects of the open system sup1hop en0 or sup1hop en
t
sup1H cent N = hclos ed0 + sup1hop en
0
sup1h cent n = hclos edt + sup1hop en
t
)(68)
Accordingly the reduced entropy sources sup1H0 = H0 iexcl SR0 + rXS cent R and sup1Ht = Ht iexclSRt + rxS cent r are given as the sum of the classical closed-system entropy sourceHclos ed
0 or Hclos edt and the additional open-system contribution to the entropy source
sup1Hop en0 or sup1Hop en
t sup1H0 = Hclos ed
0 + sup1Hop en0
sup1Ht = Hclos edt + sup1Hop en
t
)
(69)
Remark 62 (dissipation inequality) For further elaboration it proves con-venient to set up relations between the reduced entropy degux sup1H and the reducednon-mechanical energy degux sup1Q and between the reduced entropy source sup1H0 and thereduced non-mechanical energy source sup1Q0 in terms of the absolute temperature sup3 an extra entropy degux S and an extra entropy source S0
sup1H =1sup3
sup1Q + S sup1H0 =1sup3
sup1Q0 + S0 (610)
The above equations can be understood as a generalization of the ideas of Cowinamp Hegedus (1976) who have suggested including the additional entropy source S0
accounting for changes in entropy caused by changes in mass that are not consideredimplicitly through the changes in energy sup1Q0 Both the additional entropy degux S andthe entropy source S0 which we shall summarize in the term s
0 = iexcl Div S + S0 inthe following have to be determined constitutively These additional terms can beunderstood as an explicit representation of the exchange of entropy with the `outsideworldrsquo We now turn to the evaluation of the above-stated second law of thermo-dynamics by recasting it into an appropriate form of the dissipation inequality astatement that places further restrictions on the form of the constitutive response
Proc R Soc Lond A (2003)
2564 E Kuhl and P Steinmann
functions For this purpose we shall interpret the internal entropy production sup1hin t0 as
a measure for the degree of irreversibility introducing the dissipation rate sup1d0 as the
internal entropy production weighted by the absolute temperature as sup1d0 = sup3 sup1hin t
0 gt 0With the help of the balance of entropy (67)1 the relations (610) and the bal-ance of internal energy (512)1 the dissipation rate can be reformulated to yield theClausiusDuhem inequality in an internal energy based fashion
sup1d0 = sup1pin t
0 iexcl raquo 0Dt[I iexcl sup3 S ] iexcl raquo 0S Dt sup3 iexcl s0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (611)
By making use of the appropriate LegendreFenchel transform introducing theHelmholtz free energy ordf = I iexcl sup3 S we end up with the classical free-energy-basedversion of the ClausiusDuhem inequality
sup1d0 = sup1brvbar t DtF iexcl raquo 0 Dt ordf iexcl raquo 0S Dt sup3 iexcl s
0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (612)
which is particularly useful when the temperature sup3 rather than the entropy S isused as the independent variable In classical thermodynamics the ClausiusDuheminequality (612) is typically decomposed into a local and a conductive contributionsup1d loc
0 and sup1dcon0
sup1d loc0 = sup1brvbar t DtF iexcl raquo 0Dt ordf iexcl raquo 0SDt sup3 iexcl s
0 sup3 gt 0 sup1d con0 = iexcl sup1Q cent rX ln sup3 gt 0 (613)
whereby the local term sup1d loc0 gt 0 represents the ClausiusPlanck inequality for open
systems while the remaining conductive term sup1dcon0 gt 0 is typically referred to as a
Fourier inequality As a suplusmncient condition for sup1d0 gt 0 both inequalities are required
to hold separately In what follows we shall apply the dissipation inequality (613) toderive constitutive equations for the reduced momentum degux sup1brvbar t and the entropy SIn addition the evaluation of the dissipation inequality places further restrictions onthe extra entropy exchange s
0 The underlying procedure will be highlighted in detailfor the simple model problem of thermo-hyperelasticity in the following section
Remark 63 Note that at this stage the introduction of the reduced entropydegux and source sup1H = sup1Q=sup3 + S and sup1H0 = sup1Q0=sup3 + S0 as introduced in equations(610) is a mere constitutive assumption Nevertheless for particular constitutive-model problems the postulated relations can be verimacred through the evaluation ofthe dissipation inequality according to Muller (1973) and Liu (1972) (see also Liu2002) It will turn out that in most cases equations (610) are justimacred with thetrivial solution S = 0 and S0 = 0 However assuming this result from the veryoutset might be too restrictive for complex constitutive models as also pointed outby Epstein amp Maugin (2000)
7 Thermo-hyperelasticity
We are now in a position to exploit the second law of thermodynamics in the formof the ClausiusDuhem inequality along the lines of Coleman amp Noll (1963) Thestraightforward evaluation of the local part of the dissipation inequality in the formof the ClausiusPlanck inequality (613)1 will result in the demacrnition of the reducedmomentum degux sup1brvbar and the mass-specimacrc entropy density S Its conductive sup-plement (613)2 the Fourier inequality suggests the demacrnition of the reduced non-mechanical energy degux sup1Q along the lines of the classical linear heat conduction intro-duced by Fourier in 1822 Finally the mass degux R will be introduced constitutively
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2565
in the context of classical linear mass diregusion according to Fickrsquos law Here wewill thus restrict ourselves to a thermo-hyperelastic-model problem for which all thedissipation is caused exclusively by heat conduction and possibly by an additionalopen-system contribution of the `outside worldrsquo In what follows we shall make useof the multiplicative decomposition of the free energy ordf 0
ordf 0 = raquo 0 ordf (71)
Thereby the mass-specimacrc free-energy density ordf is expressed in terms of the materialdensity raquo 0 the deformation gradient F and the absolute temperature sup3 with a pos-sible explicit dependence on the material placement X Within the thermodynamicsof open systems the material density raquo 0 is allowed to vary in space and time is thusintroduced as function of the material placement X and the time t
ordf = ordf ( raquo 0 F sup3 X) raquo 0 = raquo 0(X t) (72)
Consequently the material time derivative of the free-energy density is formally givenin the form
Dt ordf = D raquo 0ordf Dt raquo 0 + DF ordf DtF + D sup3 ordf Dt sup3 (73)
The evaluation of the ClausiusPlanck inequality (613)1
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 + [ sup1brvbar t iexcl raquo 0DF ordf ] DtF iexcl [ raquo 0S + raquo 0 D sup3 ordf ] Dt sup3 iexcl s0 sup3 gt 0 (74)
demacrnes the reduced macrrst PiolaKirchhoreg stress tensor sup1brvbar t and the mass-specimacrcentropy S as thermodynamically conjugate variables to the deformation gradientF and the absolute temperature sup3
sup1brvbar t = raquo 0 DF ordf S = iexcl D sup3 ordf (75)
As in Cowin amp Hegedus (1976) we are left with a reduced inequality of the form
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 iexcl s0 sup3 gt 0 (76)
In biomechanics the simplest choice for the free-energy function ordf for cellular mate-rials such as open-pored biological tissues is based on the classical isotropic Neo-Hookean-type free-energy function weighted by the actual relative density [ raquo 0=raquo curren
0]n
(see for example Carter amp Hayes 1977 Gibson amp Ashby 1997)
ordf =middot
raquo 0
raquo curren0
cedil[niexcl1] 1raquo curren
0
[12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]] (77)
Here para and middot denote the classical Lamparae constants and n is an additional exponentusually allowed to vary between 1 6 n 6 35 A selection of more advanced free-energy functions for orthotropic biological tissues can be found for example in therecent collection of publications by Cowin amp Humphrey (2001) The derivatives of thefree energy ordf with respect to the material density raquo 0 and the deformation gradientF take the format
D raquo 0ordf = [n iexcl 1]
middotraquo 0
raquo curren0
cedil[niexcl2]middot 1raquo curren
0
cedil2
[ 12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]]
DF ordf =middot
raquo 0
raquo curren0
cedil[niexcl1]middot 1raquo curren
0
cedil[ middot F + [ para ln J iexcl middot ]F iexclt]
9gtgtgtgt=
gtgtgtgt
(78)
Proc R Soc Lond A (2003)
2566 E Kuhl and P Steinmann
whereby the macrrst derivative can alternatively be expressed as D raquo 0ordf = [n iexcl 1] ordf =raquo 0
According to equation (75) the reduced macrrst PiolaKirchhoreg stress tensor
sup1brvbar t =middot
raquo 0
raquo curren0
cediln
[ middot F + [ para ln J iexcl middot ]F iexclt] (79)
can be understood as the classical Neo-Hookean stress tensor weighted by the actualrelative density [ raquo 0=raquo curren
0]n The reduced dissipation inequality
iexcl [n iexcl 1] ordf [Div R + R0] + sup3 [Div S iexcl S0] gt 0 (710)
places implicit restrictions on the dissipation generated by the density evolution Dt raquo 0
through the mass degux R and the mass source R0 This amount of dissipation hasat least to be compensated by an appropriate constitutive assumption for the extraexternal entropy input s
0 through the extra entropy degux S and the extra entropysource S0 eg
S = [n iexcl 1] ordf1sup3
R S0 = iexcl [n iexcl 1] ordf1sup3
R0 (711)
Similar to the context of chemomechanics the degux r or R is usually related to thespatial or material gradient of the density rx raquo 0 or rX raquo 0 as
r = R0b cent rx raquo 0 R = rtB cent rX raquo 0 (712)
in analogy to Fickrsquos law for concentrations Here R0 and rt denote the mass-conduction coeplusmncient introducing either a materially or a spatially isotropicresponse In the context of biomechanics we typically macrnd variations of the con-stitutive equation
R0 =middot
raquo 0
raquo curren0
cediliexclm
ordf 0 iexcl ordf curren0 (713)
for the mass source R0 where raquo curren0 and ordf curren
0 denote the reference density and the refer-ence free energy respectively while m is an additional exponent that is commonlychosen to m gt n (see Harrigan amp Hamilton 1993) Finally the evaluation of theFourier inequality (613)2 as sup1d con
0 = iexcl sup1Q cent rX ln sup3 gt 0 suggests the demacrnition of themass-specimacrc non-mechanical energy degux sup1q or sup1Q according to Fourierrsquos law as
sup1q = iexcl K0b cent rx sup3 sup1Q = iexcl ktB cent rX sup3 (714)
with K0 and kt denoting the materially or spatially isotropic conductivity In order toa priori guarantee the satisfaction of the Fourier inequality (613)2 the conductivityis required to be non-negative K0 gt 0 and kt gt 0
8 Conclusion
We have presented a general framework for the thermodynamics of open systemsThe derived macreld equations are believed to be particularly useful in biomechanicalor chemomechanical applications where attention is conmacrned to one individual sub-system of the overall matter present Due to the fact that this open subsystem isallowed to constantly gain or lose mass the balance of mass had to be enhancedby additional surface and volume terms redegecting the interaction with the `outsideworldrsquo Since the newly created mass carries a particular amount of momentum
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2567
energy and entropy all the other balance equations had to be reformulated as wellTo clarify the indeguence of the changes in mass we have introduced the notions of`volume-specimacrcrsquo and `mass-specimacrcrsquo formats The former accounts for the total indegu-ence of the changes in mass through explicit mass-dependent and additional implicitopen-system contributions The latter however is free from all the mass-dependentextra terms and thus takes the familiar structure known from classical continuumthermodynamics The mass-specimacrc format is believed to be particularly useful sinceit parallels the framework of the closed-system case Consequently permissible con-stitutive relations can be derived from the mass-specimacrc version of the dissipationinequality The underlying procedure has been illustrated for the model problem ofthermo-hyperelasticity
References
Bowen R M 1976 Theory of mixtures In Continuum physics vol III Mixtures and EM macreldtheories (ed A C Eringen) pp 1127 Academic
Carter D R amp Hayes W C 1977 The behavior of bone as a two-phase porous structure JBone Joint Surg Am 59 785794
Coleman B D amp Noll W 1963 The thermodynamics of elastic materials with heat conductionand viscosity Arch Ration Mech Analysis 13 167178
Cowin S C amp Hegedus D H 1976 Bone remodelling I Theory of adaptive elasticity JElastic 6 313326
Cowin S C amp Humphrey J D 2001 Cardiovascular soft tissue mechanics Dordrecht Kluwer
de Boer R 2000 Theory of porous media Springer
Diebels S 2000 Mikropolare Zweiphasenmodelle Formulierung auf der Basis der TheoriePoroser Medien Habilitationsschrift Bericht aus dem Institut fur Mechanik (Bauwesen)Nr II-4 Universitat Stuttgart
Ehlers W 2002 Foundations of multiphasic and porous materials In Porous media theoryexperiments and numerical applications (ed W Ehlers amp J Bluhm) pp 386 Springer
Epstein M amp Maugin G A 2000 Thermomechanics of volumetric growth in uniform bodiesInt J Plasticity 16 951978
Gibson L J amp Ashby M F 1997 The mechanics of three-dimensional cellular materials ProcR Soc Lond A 382 4359
Goldstein H 1950 Classical mechanics Addison-Wesley
Harrigan T P amp Hamilton J J 1993 Finite element simulation of adaptive bone remodellinga stability criterion and a time-stepping method Int J Numer Meth Engng 36 837854
Haupt P 2000 Continuum mechanics and theory of materials Springer
Humphrey J D 2002 Cardiovasular solid mechanics Springer
Humphrey J D amp Rajagopal K R 2002 A constrained mixture model for growth and remod-eling of soft tissues Math Models Meth Appl Sci 12 407430
Liu I S 1972 Method of Lagrange multipliers for exploitation of the entropy principle ArchRation Mech Analysis 46 131148
Liu I S 2002 Continuum mechanics Springer
Malvern L E 1969 Introduction to the mechanics of a continuous medium Englewood Clireg sNJ Prentice Hall
Maugin G A 1993 Material inhomogenities in elasticity London Chapman amp Hall
Maugin G A 1999 The thermomechanics of nonlinear irreversible behaviors World Scientimacrc
Muller I 1973 Thermodynamik die Grundlagen der Materialtheorie Dusseldorf BertelsmannUniversitatsverlag
Proc R Soc Lond A (2003)
2568 E Kuhl and P Steinmann
Muller I 1994 Grundzuge der Thermodynamik Springer
Runesson K 1978 On nonlinear consolidation of soft clay PhD thesis Department of StructuralMechanics Chalmers University of Technology Goteborg Sweden
Schrodinger E 1944 What is life Cambridge University Press
Taber L A 1995 Biomechanics of growth remodeling and morphogenesis Appl Mech Rev48 487545
Truesdell C amp Toupin R 1960 The classical macreld theories In Handbuch der Physik (edS Flugge) vol 3 Springer
Wu T Hutter K amp Svendsen B 1998 On shear deg ow of a saturated icesediment mixture withthermodynamic equilibrium pressure and momentum exchange Proc R Soc Lond A 4547188
Proc R Soc Lond A (2003)

Thermodynamics for open systems 2557
The rate of change of the mass-specimacrc momentum density p ie the covariant spatialvelocity is balanced with the reduced momentum deguxes sup1brvbar t or sup1frac14 t and the reducedmomentum sources sup1b0 or sup1bt By subtracting the balance of mass (35) weighted bythe momentum density p from the volume-specimacrc momentum balance (47) we canderive the diregerent versions of the mass-specimacrc momentum balance
raquo 0Dtp = Div sup1brvbar t + sup1b0 raquo t dtp + raquo tv cent rxp = div sup1frac14 t + sup1bt (423)
The reduced momentum deguxes sup1brvbar t and sup1frac14 t which are related to the overall momen-tum deguxes brvbar t and frac14 t through sup1brvbar t = brvbar t iexcl p laquo R and sup1frac14 t = frac14 t iexcl p laquo r are deter-mined by the closed- and open-system stress-vector contributions tclos ed
0 and sup1t op en0
or tclos edt and sup1t op en
t respectively on the Neumann boundary
sup1brvbar t cent N = tclos ed0 + sup1t op en
0
sup1frac14 t cent n = tclos edt + sup1t op en
t
)(424)
while the reduced momentum sources sup1b0 and sup1bt are given as the sum of the classicalclosed-system volume force contributions bclos ed
0 or bclos edt and the reduced open-
system contributions sup1b op en0 or sup1b op en
t
sup1b0 = bclos ed0 + sup1bop en
0
sup1bt = bclos edt + sup1bop en
t
)(425)
Note that the mass-specimacrc momentum balance (423) is free from all the explicitextra terms caused by the changes in mass The indeguence of the open system mani-fests itself only implicitly through the prescribed boundary terms sup1t op en
0 and sup1t op ent and
the prescribed volume sources sup1b op en0 and sup1b op en
t The convective indeguence introducedthrough the raquo tv cent rxp term however is also present in the closed-system case
Remark 43 (balance of angular momentum) The mass-specimacrc angular-momentum density l is given as the vector product of the mass-specimacrc momentumdensity p with the distance vector a = rsquo iexcl rsquo0
l = a pound p (426)
Consequently the mass-specimacrc version of the balance of angular momentum followsfrom the vector product of the mass-specimacrc momentum balance (423) with thedistance vector a
a pound raquo 0Dtp = a pound Div sup1brvbar t + a pound sup1b0 (427)
By making use of the demacrnition (426) the above equation can be rewritten as
raquo 0Dtl = Div(a pound sup1brvbar t) + a pound sup1b0 iexcl F pound sup1brvbar t (428)
Again the third term on the right-hand side iexcl F pound sup1brvbar t = 2[F cent sup1brvbar ]axl representsthe production of the mass-specimacrc angular momentum l If we require the balanceof angular momentum to represent an individual independent statement
raquo 0Dtl = Div(a pound sup1brvbar t) + a pound sup1b0 (429)
this production term has to vanish identically This condition thus reveals the sym-metry requirements
F cent sup1brvbar = sup1brvbar t cent F t sup1frac14 = sup1frac14 t (430)
Proc R Soc Lond A (2003)
2558 E Kuhl and P Steinmann
The material and the spatial versions (430)1 and (430)2 respectively are relatedthrough the corresponding Piola transform sup1brvbar t = J sup1frac14 t cent F iexclt A comparison of thevolume-specimacrc statement (413) with its mass-specimacrc counterpart (429) indicatesthat the in- or outdegux of mass R or r produces an additional amount of angularmomentum unless
F cent R laquo p = p laquo R cent F t r laquo p = p laquo r (431)
ie the mass degux F centR or r is constitutively demacrned to be coaxial to the mass-specimacrcmomentum density p
Remark 44 (balance of kinetic energy) To investigate the mass-specimacrc ver-sion of the balance of kinetic energy we need to evaluate the material time derivativeof the mass-specimacrc kinetic-energy density K = 1
2v centv which can easily be derived by
subtracting the weighted balance of mass (415)2 from the material time derivativeof the volume-specimacrc kinetic-energy density K0 given in equation (418) as
raquo 0 DtK = DtK0 iexcl K Dt raquo 0 (432)
and thusraquo 0 DtK = Div(v cent sup1brvbar t) + v cent sup1bext
0 iexcl sup1brvbar t DtF (433)
Consequently we can identify the mass-specimacrc external and internal mechanicalpower sup1pext
0 and sup1pin t0 respectively
sup1pext0 = pext
0 iexcl KDt raquo 0 = Div(v cent sup1brvbar t) + v cent sup1b0
sup1pin t0 = pin t
0 = sup1brvbar t DtF
)(434)
It is worth noting that the diregerence of the mass- and volume-specimacrc formu-lation manifests itself only in the demacrnition of the external mechanical powersup1pext
0 = pext0 iexcl KDt raquo 0 while the mass-specimacrc internal power is identical to its volume-
specimacrc counterpart as sup1pin t0 = pin t
0 Consequently the material and the spatial versionof the mass-specimacrc balance of kinetic energy take the formats
raquo 0 DtK = sup1pext0 iexcl sup1pin t
0 raquo t dtK + raquo tv cent rxK = sup1pextt iexcl sup1pin t
t (435)
whereby both formulations are related through the corresponding Piola transformswith sup1pext
0 = J sup1pextt and sup1pin t
0 = Jsup1pin tt and the Euler theorem (24)
5 Balance of energy
The balance of total energy as a representation of the macrrst law of thermodynamicsbalances the rate of change of the volume-specimacrc total energy density E0 or Et asthe sum of the kinetic and internal energy density E0 = K0 + I0 or Et = Kt + It
with the external power In classical continuum mechanics of closed systems thisexternal power is composed of a purely mechanical contribution pext
0 or pextt and a
non-mechanical thermal contribution qext0 or qext
t Therefore the balance of energy issometimes referred to as the `principle of interconvertibility of heat and mechanicalworkrsquo a notion which was known to Carnot in 1832 and experimentally verimacredby Joule in 1843 However when dealing with open systems we have to generalizethe demacrnition of the non-mechanical external power by including additional externalopen-system contributions in the demacrnition of qext
0 and qextt (cf Malvern 1969 x 54)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2559
rsquo
F J DtF
B0 Bt
E0
v cent brvbar t Q
v cent b0 Q0
Et
v cent frac14 t q
v cent bt Qt
Figure 4 Balance of energy energy densities deg uxes and sources
(a) Volume-specimacrc version
For the spatial-motion problem the rate of change of the volume-specimacrc totalenergy density E0 = raquo 0E can be expressed in the form (cf macrgure 4)
DtE0 = Div(v cent sup1brvbar t iexcl sup1Q + ER) + v cent sup1b0 + sup1Q0 + ER0 iexcl rXE cent R (51)
Thereby in addition to the purely mechanical external power pext0 demacrned in equa-
tion (419) we have included the non-mechanical external power qext0 accounting
for the classical thermal eregects of the closed system and the additional open-systemeregects as an additional non-mechanical supply of energy
qext0 = Div( iexcl Q) + Q0 (52)
Similar to the mechanical power the non-mechanical power consists of a degux and asource contribution denoted by Q and Q0 respectively The former is composed ofthe reduced outward non-mechanical energy degux sup1Q modimacred by the explicit extradegux due to the open system IR while the latter is the sum of the reduced non-mechanical energy source sup1Q0 enhanced by the explicit eregects of the open systemIR0 and rXI cent R
pext0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R
qext0 = Div( iexcl sup1Q + IR) + sup1Q0 + IR0 iexcl rXI cent R
)
(53)
Equation (51) can thus be reformulated in the concise form
DtE0 = pext0 + qext
0 dtEt + div(Etv) = pextt + qext
t (54)
which for the classical closed-system case dates back to the early works of Duhem in1892 Again the spatial version (54)2 follows from the appropriate Piola transformsE0 = JEt
pext0 = Jpext
t qext0 = Jqext
t Q = Jq cent F iexclt and sup1Q = J sup1q cent F iexclt along withReynoldsrsquos transport theorem (211) The demacrnition of the non-mechanical energydeguxes Q and q parallels the introduction of the macrrst PiolaKirchhoreg stress tensorbrvbar and the Cauchy stress frac14 On the Neumann boundary the non-mechanical energydeguxes Q and q are given in terms of the normal projection of the classical heat deguxdensities qclos ed
0 and qclos edt and the additional open-system contributions qop en
0 andqop en
t Q cent N = qclos ed
0 + qop en0 qop en
0 = sup1q op en0 iexcl IR cent N
q cent n = qclos edt + qop en
t qop ent = sup1q op en
t iexcl Ir cent n
)(55)
Proc R Soc Lond A (2003)
2560 E Kuhl and P Steinmann
Moreover the non-mechanical energy sources Q0 and Qt can be understood as thesum of the classical heat source Qclos ed
0 and Qclos edt and an additional non-mechanical
energy source taking into account the nature of the open system Qop en0 and Qop en
t
Q0 = Qclos ed0 + Qop en
0 Qop en0 = sup1Qop en
0 + IR0 iexcl rXI cent R
Qt = Qclos edt + Qop en
t Qop ent = sup1Qop en
t + IRt iexcl rxI cent r
)(56)
In formal analogy to the demacrnition of the momentum quantities the expressions interms of R r R0 and Rt take into account the part of the newly added mass thatcarries the same amount of non-mechanical energy as the original substrate while theadditional open-system terms sup1q op en
0 sup1q op ent sup1Qop en
0 and sup1Qop ent account for a possible
diregerence in non-mechanical energy
Remark 51 (balance of internal energy) For further thermodynamical con-siderations it proves convenient to consider the volume-specimacrc internal energy den-sity I0 = E0 iexcl K0 or It = Et iexcl Kt given as the diregerence of the corresponding totalenergy density and the kinetic-energy density Consequently the two versions of thebalance of internal energy follow from subtracting the balance of kinetic energy (420)from the total energy balance (54)
DtI0 = pin t0 + qext
0 dtIt + div(Itv) = pin tt + qext
t (57)
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the equations derived above balances the mass-specimacrc energy density E = E0=raquo 0 with the mass-specimacrc external mechanical powersup1pext
0 introduced in (434) and the mass-specimacrc non-mechanical power sup1qext0 as
sup1qext0 = qext
0 iexcl IDt raquo 0 = iexcl Div sup1Q + sup1Q0 (58)
The corresponding balance equations
raquo 0 DtE = sup1pext0 + sup1qext
0 raquo t dtE + raquo tv cent rxE = sup1pextt + sup1qext
t (59)
follow from subtracting the corresponding balance of mass (35) weighted by the totalenergy E from the volume-specimacrc energy balance (54) The spatial version (59)2can be derived by applying the corresponding Piola transforms with sup1pext
0 = Jsup1pextt and
sup1qext0 = J sup1qext
t and the Euler theorem (24) Again we can relate the reduced energydeguxes sup1Q and sup1q demacrned through sup1Q = Q iexcl IR and sup1q = q iexcl Ir to the classical heatdegux qclos ed
0 or qclos edt and the energy degux caused by additional eregects of the open
system sup1q op en0 and sup1q op en
t
sup1Q cent N = qclos ed0 + sup1q op en
0
sup1q cent n = qclos edt + sup1q op en
t
)(510)
Moreover the reduced non-mechanical energy sources sup1Q0 and sup1Qt are given as the sumof the classical heat source of a closed system Qclos ed
0 and Qclos edt and the additional
open-system contribution to the energy sup1Qop en0 and sup1Qop en
t
sup1Q0 = Qclos ed0 + sup1Qop en
0
sup1Qt = Qclos edt + sup1Qop en
t
)(511)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2561
Again as opposed to the formulation developed by Epstein amp Maugin (2000) themass-specimacrc format is free from all the explicit extra terms caused by changes inmass and thus resembles the balance of energy known from classical mechanics
Remark 52 (balance of internal energy) A reduction to the balance ofinternal energy I = E iexcl K follows from subtracting the balance of kinetic energy(435) from the balance of total energy (59)
raquo 0 DtI = sup1pin t0 + sup1qext
0 raquo t dtI + raquo tv cent rxI = sup1pin tt + sup1qext
t (512)
6 Balance of entropy
The macrrst law of thermodynamics in the form of the balance of energy expressesthe interconvertibility of heat and work However the balance of energy itself doesnot place any restrictions on the direction of the thermodynamical process Thesecond law of thermodynamics the balance of entropy postulates the existence ofan absolute temperature and of a specimacrc entropy as a state function Through theinternal production of the latter which is required to either vanish for reversibleprocesses or be strictly positive for irreversible processes a direction is imposedon the thermodynamical process Recall that when dealing with open systems amacrxed material volume B0 is allowed to constantly gain or lose mass Open systemsnaturally exhibit an additional entropy degux and entropy source caused by the addedmass as pointed out earlier in the famous monograph by Schrodinger (1944 x 6) aswell as by Malvern (1969 x 56) or also recently by Epstein amp Maugin (2000) Theindeguence of changes in mass on the entropy is twofold On the one hand it is redegectedthrough the explicit open-system entropy degux SR and the related source terms SR0
and iexcl rXS cent R On the other hand we will introduce the reduced entropy degux andsource sup1H and sup1H0 respectively which in turn split into the extra non-mechanicalenergy terms sup1Q and sup1Q0 divided by the absolute temperature sup3 and an extra entropydegux and source S and S0 While the former parallel the introduction of the entropydegux and source in classical closed-system thermodynamics the contributions S andS0 account for the diregerence in entropy of the added mass and the original substrate
Remark 61 (balance of entropy versus entropy inequality) In the relatedliterature the entropy is often introduced through the entropy inequality For thesake of analogy we will treat the entropy as a balance quantity in the followingIts evolution is thus balanced with the sum of the external and internal entropyproduction whereby the latter is constrained to be non-negative throughout In thecase of closed-system thermodynamics this approach has been followed for exampleby Truesdell amp Toupin (1960 xx 256 and 257) Haupt (2000 x 33) or Liu (2002 x 5)
(a) Volume-specimacrc version
The balance of entropy balances the volume-specimacrc entropy density S0 = raquo 0S withthe external entropy input hext
0 and the internal entropy production hin t0 Thereby
the former consists of the entropy degux H across the material surface B0 and theentropy source H0 in the material domain B0 (cf macrgure 5)
hext0 = Div( iexcl H ) + H0 (61)
Proc R Soc Lond A (2003)
2562 E Kuhl and P Steinmann
rsquo
F J DtF
B0 Bt
S0
H S
H0 S0
St
h s
Ht St
Figure 5 Balance of entropy entropy densities deg uxes and sources
The external entropy degux H is introduced as the sum of the reduced external entropydegux sup1H enhanced by the explicit open-system contribution SR Accordingly theexternal entropy source H0 consists of the reduced entropy source sup1H0 modimacred byadditional terms SR0 and iexcl rXS cent R accounting for the explicit open-system con-tribution to the entropy supply
hext0 = Div( iexcl sup1H + SR) + sup1H0 + SR0 iexcl rXS cent R
hin t0 gt 0
)(62)
Just like in classical thermodynamics of closed systems the internal entropy produc-tion hin t
0 is required to be point-wise non-negative The balance of entropy can thusbe expressed in the following form
DtS0 = hext0 + hin t
0 dtSt + div(Stv) = hextt + hin t
t (63)
Again the material and the spatial version are related through the correspond-ing Piola transforms S0 = JSt
hext0 = Jhext
t hin t0 = Jhin t
t H = Jh cent F iexclt andsup1H = J sup1h cent F iexclt in combination with Reynoldsrsquos transport theorem Note that alter-
natively the balance of entropy which is primarily nothing but a formal demacrnitionof the entropy production can be recast into the inequality DtS0 iexcl hext
0 gt 0 Thiscondition which is typically referred to as `postulate of irreversibilityrsquo in classicalthermodynamics (see Truesdell amp Toupin 1960 x 258) induces a direction to thethermodynamic process Next we will introduce Neumann boundary conditions forthe spatial-motion Kirchhoreg and Cauchy type entropy degux H and h in terms of theclassical closed-system entropy degux contribution hclos ed
0 or hclos edt and the additional
open-system contribution hop en0 or hop en
t
H cent N = hclos ed0 + hop en
0 hop en0 = sup1hop en
0 iexcl SR cent N
h cent n = hclos edt + hop en
t hop ent = sup1hop en
t iexcl Sr cent n
)
(64)
Accordingly the entropy sources H0 and Ht are introduced as the sum of the classicalentropy source of the closed system Hclos ed
0 or Hclos edt and the additional entropy
source accounting for the nature of the open system Hop en0 or Hop en
t
H0 = Hclos ed0 + Hop en
0 Hop en0 = sup1Hop en
0 + SR0 iexcl rXS cent R
Ht = Hclos edt + Hop en
t Hop ent = sup1Hop en
t + SRt iexcl rxS cent r
)
(65)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2563
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the above equations states that the rate of changeof the mass-specimacrc entropy S = S0=raquo 0 is in equilibrium with the mass-specimacrcexternal entropy input sup1hext
0 and the mass-specimacrc internal entropy production sup1hin t0
which are introduced in the following way
sup1hext0 = hext
0 iexcl SDt raquo 0 = iexcl Div sup1H + sup1H0
sup1hin t0 = hin t
0 gt 0
)
(66)
The resulting material and spatial version of the balance of entropy
raquo 0 DtS = sup1hext0 + sup1hin t
0 raquo t dtS + raquo tv cent rxS = sup1hextt + sup1hin t
t (67)
which can be derived by subtracting S times the balance of mass (35) from thevolume-specimacrc balance of entropy (63) are related via the appropriate Piola trans-forms sup1hext
0 = Jsup1hextt and sup1hin t
0 = Jsup1hin tt and the Euler theorem (24) Moreover we can
relate the reduced entropy deguxes sup1H and sup1h demacrned through sup1H = H iexcl SR andsup1h = h iexcl Sr to the classical entropy degux of the closed system hclos ed
0 or hclos edt and
the entropy degux caused by additional eregects of the open system sup1hop en0 or sup1hop en
t
sup1H cent N = hclos ed0 + sup1hop en
0
sup1h cent n = hclos edt + sup1hop en
t
)(68)
Accordingly the reduced entropy sources sup1H0 = H0 iexcl SR0 + rXS cent R and sup1Ht = Ht iexclSRt + rxS cent r are given as the sum of the classical closed-system entropy sourceHclos ed
0 or Hclos edt and the additional open-system contribution to the entropy source
sup1Hop en0 or sup1Hop en
t sup1H0 = Hclos ed
0 + sup1Hop en0
sup1Ht = Hclos edt + sup1Hop en
t
)
(69)
Remark 62 (dissipation inequality) For further elaboration it proves con-venient to set up relations between the reduced entropy degux sup1H and the reducednon-mechanical energy degux sup1Q and between the reduced entropy source sup1H0 and thereduced non-mechanical energy source sup1Q0 in terms of the absolute temperature sup3 an extra entropy degux S and an extra entropy source S0
sup1H =1sup3
sup1Q + S sup1H0 =1sup3
sup1Q0 + S0 (610)
The above equations can be understood as a generalization of the ideas of Cowinamp Hegedus (1976) who have suggested including the additional entropy source S0
accounting for changes in entropy caused by changes in mass that are not consideredimplicitly through the changes in energy sup1Q0 Both the additional entropy degux S andthe entropy source S0 which we shall summarize in the term s
0 = iexcl Div S + S0 inthe following have to be determined constitutively These additional terms can beunderstood as an explicit representation of the exchange of entropy with the `outsideworldrsquo We now turn to the evaluation of the above-stated second law of thermo-dynamics by recasting it into an appropriate form of the dissipation inequality astatement that places further restrictions on the form of the constitutive response
Proc R Soc Lond A (2003)
2564 E Kuhl and P Steinmann
functions For this purpose we shall interpret the internal entropy production sup1hin t0 as
a measure for the degree of irreversibility introducing the dissipation rate sup1d0 as the
internal entropy production weighted by the absolute temperature as sup1d0 = sup3 sup1hin t
0 gt 0With the help of the balance of entropy (67)1 the relations (610) and the bal-ance of internal energy (512)1 the dissipation rate can be reformulated to yield theClausiusDuhem inequality in an internal energy based fashion
sup1d0 = sup1pin t
0 iexcl raquo 0Dt[I iexcl sup3 S ] iexcl raquo 0S Dt sup3 iexcl s0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (611)
By making use of the appropriate LegendreFenchel transform introducing theHelmholtz free energy ordf = I iexcl sup3 S we end up with the classical free-energy-basedversion of the ClausiusDuhem inequality
sup1d0 = sup1brvbar t DtF iexcl raquo 0 Dt ordf iexcl raquo 0S Dt sup3 iexcl s
0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (612)
which is particularly useful when the temperature sup3 rather than the entropy S isused as the independent variable In classical thermodynamics the ClausiusDuheminequality (612) is typically decomposed into a local and a conductive contributionsup1d loc
0 and sup1dcon0
sup1d loc0 = sup1brvbar t DtF iexcl raquo 0Dt ordf iexcl raquo 0SDt sup3 iexcl s
0 sup3 gt 0 sup1d con0 = iexcl sup1Q cent rX ln sup3 gt 0 (613)
whereby the local term sup1d loc0 gt 0 represents the ClausiusPlanck inequality for open
systems while the remaining conductive term sup1dcon0 gt 0 is typically referred to as a
Fourier inequality As a suplusmncient condition for sup1d0 gt 0 both inequalities are required
to hold separately In what follows we shall apply the dissipation inequality (613) toderive constitutive equations for the reduced momentum degux sup1brvbar t and the entropy SIn addition the evaluation of the dissipation inequality places further restrictions onthe extra entropy exchange s
0 The underlying procedure will be highlighted in detailfor the simple model problem of thermo-hyperelasticity in the following section
Remark 63 Note that at this stage the introduction of the reduced entropydegux and source sup1H = sup1Q=sup3 + S and sup1H0 = sup1Q0=sup3 + S0 as introduced in equations(610) is a mere constitutive assumption Nevertheless for particular constitutive-model problems the postulated relations can be verimacred through the evaluation ofthe dissipation inequality according to Muller (1973) and Liu (1972) (see also Liu2002) It will turn out that in most cases equations (610) are justimacred with thetrivial solution S = 0 and S0 = 0 However assuming this result from the veryoutset might be too restrictive for complex constitutive models as also pointed outby Epstein amp Maugin (2000)
7 Thermo-hyperelasticity
We are now in a position to exploit the second law of thermodynamics in the formof the ClausiusDuhem inequality along the lines of Coleman amp Noll (1963) Thestraightforward evaluation of the local part of the dissipation inequality in the formof the ClausiusPlanck inequality (613)1 will result in the demacrnition of the reducedmomentum degux sup1brvbar and the mass-specimacrc entropy density S Its conductive sup-plement (613)2 the Fourier inequality suggests the demacrnition of the reduced non-mechanical energy degux sup1Q along the lines of the classical linear heat conduction intro-duced by Fourier in 1822 Finally the mass degux R will be introduced constitutively
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2565
in the context of classical linear mass diregusion according to Fickrsquos law Here wewill thus restrict ourselves to a thermo-hyperelastic-model problem for which all thedissipation is caused exclusively by heat conduction and possibly by an additionalopen-system contribution of the `outside worldrsquo In what follows we shall make useof the multiplicative decomposition of the free energy ordf 0
ordf 0 = raquo 0 ordf (71)
Thereby the mass-specimacrc free-energy density ordf is expressed in terms of the materialdensity raquo 0 the deformation gradient F and the absolute temperature sup3 with a pos-sible explicit dependence on the material placement X Within the thermodynamicsof open systems the material density raquo 0 is allowed to vary in space and time is thusintroduced as function of the material placement X and the time t
ordf = ordf ( raquo 0 F sup3 X) raquo 0 = raquo 0(X t) (72)
Consequently the material time derivative of the free-energy density is formally givenin the form
Dt ordf = D raquo 0ordf Dt raquo 0 + DF ordf DtF + D sup3 ordf Dt sup3 (73)
The evaluation of the ClausiusPlanck inequality (613)1
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 + [ sup1brvbar t iexcl raquo 0DF ordf ] DtF iexcl [ raquo 0S + raquo 0 D sup3 ordf ] Dt sup3 iexcl s0 sup3 gt 0 (74)
demacrnes the reduced macrrst PiolaKirchhoreg stress tensor sup1brvbar t and the mass-specimacrcentropy S as thermodynamically conjugate variables to the deformation gradientF and the absolute temperature sup3
sup1brvbar t = raquo 0 DF ordf S = iexcl D sup3 ordf (75)
As in Cowin amp Hegedus (1976) we are left with a reduced inequality of the form
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 iexcl s0 sup3 gt 0 (76)
In biomechanics the simplest choice for the free-energy function ordf for cellular mate-rials such as open-pored biological tissues is based on the classical isotropic Neo-Hookean-type free-energy function weighted by the actual relative density [ raquo 0=raquo curren
0]n
(see for example Carter amp Hayes 1977 Gibson amp Ashby 1997)
ordf =middot
raquo 0
raquo curren0
cedil[niexcl1] 1raquo curren
0
[12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]] (77)
Here para and middot denote the classical Lamparae constants and n is an additional exponentusually allowed to vary between 1 6 n 6 35 A selection of more advanced free-energy functions for orthotropic biological tissues can be found for example in therecent collection of publications by Cowin amp Humphrey (2001) The derivatives of thefree energy ordf with respect to the material density raquo 0 and the deformation gradientF take the format
D raquo 0ordf = [n iexcl 1]
middotraquo 0
raquo curren0
cedil[niexcl2]middot 1raquo curren
0
cedil2
[ 12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]]
DF ordf =middot
raquo 0
raquo curren0
cedil[niexcl1]middot 1raquo curren
0
cedil[ middot F + [ para ln J iexcl middot ]F iexclt]
9gtgtgtgt=
gtgtgtgt
(78)
Proc R Soc Lond A (2003)
2566 E Kuhl and P Steinmann
whereby the macrrst derivative can alternatively be expressed as D raquo 0ordf = [n iexcl 1] ordf =raquo 0
According to equation (75) the reduced macrrst PiolaKirchhoreg stress tensor
sup1brvbar t =middot
raquo 0
raquo curren0
cediln
[ middot F + [ para ln J iexcl middot ]F iexclt] (79)
can be understood as the classical Neo-Hookean stress tensor weighted by the actualrelative density [ raquo 0=raquo curren
0]n The reduced dissipation inequality
iexcl [n iexcl 1] ordf [Div R + R0] + sup3 [Div S iexcl S0] gt 0 (710)
places implicit restrictions on the dissipation generated by the density evolution Dt raquo 0
through the mass degux R and the mass source R0 This amount of dissipation hasat least to be compensated by an appropriate constitutive assumption for the extraexternal entropy input s
0 through the extra entropy degux S and the extra entropysource S0 eg
S = [n iexcl 1] ordf1sup3
R S0 = iexcl [n iexcl 1] ordf1sup3
R0 (711)
Similar to the context of chemomechanics the degux r or R is usually related to thespatial or material gradient of the density rx raquo 0 or rX raquo 0 as
r = R0b cent rx raquo 0 R = rtB cent rX raquo 0 (712)
in analogy to Fickrsquos law for concentrations Here R0 and rt denote the mass-conduction coeplusmncient introducing either a materially or a spatially isotropicresponse In the context of biomechanics we typically macrnd variations of the con-stitutive equation
R0 =middot
raquo 0
raquo curren0
cediliexclm
ordf 0 iexcl ordf curren0 (713)
for the mass source R0 where raquo curren0 and ordf curren
0 denote the reference density and the refer-ence free energy respectively while m is an additional exponent that is commonlychosen to m gt n (see Harrigan amp Hamilton 1993) Finally the evaluation of theFourier inequality (613)2 as sup1d con
0 = iexcl sup1Q cent rX ln sup3 gt 0 suggests the demacrnition of themass-specimacrc non-mechanical energy degux sup1q or sup1Q according to Fourierrsquos law as
sup1q = iexcl K0b cent rx sup3 sup1Q = iexcl ktB cent rX sup3 (714)
with K0 and kt denoting the materially or spatially isotropic conductivity In order toa priori guarantee the satisfaction of the Fourier inequality (613)2 the conductivityis required to be non-negative K0 gt 0 and kt gt 0
8 Conclusion
We have presented a general framework for the thermodynamics of open systemsThe derived macreld equations are believed to be particularly useful in biomechanicalor chemomechanical applications where attention is conmacrned to one individual sub-system of the overall matter present Due to the fact that this open subsystem isallowed to constantly gain or lose mass the balance of mass had to be enhancedby additional surface and volume terms redegecting the interaction with the `outsideworldrsquo Since the newly created mass carries a particular amount of momentum
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2567
energy and entropy all the other balance equations had to be reformulated as wellTo clarify the indeguence of the changes in mass we have introduced the notions of`volume-specimacrcrsquo and `mass-specimacrcrsquo formats The former accounts for the total indegu-ence of the changes in mass through explicit mass-dependent and additional implicitopen-system contributions The latter however is free from all the mass-dependentextra terms and thus takes the familiar structure known from classical continuumthermodynamics The mass-specimacrc format is believed to be particularly useful sinceit parallels the framework of the closed-system case Consequently permissible con-stitutive relations can be derived from the mass-specimacrc version of the dissipationinequality The underlying procedure has been illustrated for the model problem ofthermo-hyperelasticity
References
Bowen R M 1976 Theory of mixtures In Continuum physics vol III Mixtures and EM macreldtheories (ed A C Eringen) pp 1127 Academic
Carter D R amp Hayes W C 1977 The behavior of bone as a two-phase porous structure JBone Joint Surg Am 59 785794
Coleman B D amp Noll W 1963 The thermodynamics of elastic materials with heat conductionand viscosity Arch Ration Mech Analysis 13 167178
Cowin S C amp Hegedus D H 1976 Bone remodelling I Theory of adaptive elasticity JElastic 6 313326
Cowin S C amp Humphrey J D 2001 Cardiovascular soft tissue mechanics Dordrecht Kluwer
de Boer R 2000 Theory of porous media Springer
Diebels S 2000 Mikropolare Zweiphasenmodelle Formulierung auf der Basis der TheoriePoroser Medien Habilitationsschrift Bericht aus dem Institut fur Mechanik (Bauwesen)Nr II-4 Universitat Stuttgart
Ehlers W 2002 Foundations of multiphasic and porous materials In Porous media theoryexperiments and numerical applications (ed W Ehlers amp J Bluhm) pp 386 Springer
Epstein M amp Maugin G A 2000 Thermomechanics of volumetric growth in uniform bodiesInt J Plasticity 16 951978
Gibson L J amp Ashby M F 1997 The mechanics of three-dimensional cellular materials ProcR Soc Lond A 382 4359
Goldstein H 1950 Classical mechanics Addison-Wesley
Harrigan T P amp Hamilton J J 1993 Finite element simulation of adaptive bone remodellinga stability criterion and a time-stepping method Int J Numer Meth Engng 36 837854
Haupt P 2000 Continuum mechanics and theory of materials Springer
Humphrey J D 2002 Cardiovasular solid mechanics Springer
Humphrey J D amp Rajagopal K R 2002 A constrained mixture model for growth and remod-eling of soft tissues Math Models Meth Appl Sci 12 407430
Liu I S 1972 Method of Lagrange multipliers for exploitation of the entropy principle ArchRation Mech Analysis 46 131148
Liu I S 2002 Continuum mechanics Springer
Malvern L E 1969 Introduction to the mechanics of a continuous medium Englewood Clireg sNJ Prentice Hall
Maugin G A 1993 Material inhomogenities in elasticity London Chapman amp Hall
Maugin G A 1999 The thermomechanics of nonlinear irreversible behaviors World Scientimacrc
Muller I 1973 Thermodynamik die Grundlagen der Materialtheorie Dusseldorf BertelsmannUniversitatsverlag
Proc R Soc Lond A (2003)
2568 E Kuhl and P Steinmann
Muller I 1994 Grundzuge der Thermodynamik Springer
Runesson K 1978 On nonlinear consolidation of soft clay PhD thesis Department of StructuralMechanics Chalmers University of Technology Goteborg Sweden
Schrodinger E 1944 What is life Cambridge University Press
Taber L A 1995 Biomechanics of growth remodeling and morphogenesis Appl Mech Rev48 487545
Truesdell C amp Toupin R 1960 The classical macreld theories In Handbuch der Physik (edS Flugge) vol 3 Springer
Wu T Hutter K amp Svendsen B 1998 On shear deg ow of a saturated icesediment mixture withthermodynamic equilibrium pressure and momentum exchange Proc R Soc Lond A 4547188
Proc R Soc Lond A (2003)

2558 E Kuhl and P Steinmann
The material and the spatial versions (430)1 and (430)2 respectively are relatedthrough the corresponding Piola transform sup1brvbar t = J sup1frac14 t cent F iexclt A comparison of thevolume-specimacrc statement (413) with its mass-specimacrc counterpart (429) indicatesthat the in- or outdegux of mass R or r produces an additional amount of angularmomentum unless
F cent R laquo p = p laquo R cent F t r laquo p = p laquo r (431)
ie the mass degux F centR or r is constitutively demacrned to be coaxial to the mass-specimacrcmomentum density p
Remark 44 (balance of kinetic energy) To investigate the mass-specimacrc ver-sion of the balance of kinetic energy we need to evaluate the material time derivativeof the mass-specimacrc kinetic-energy density K = 1
2v centv which can easily be derived by
subtracting the weighted balance of mass (415)2 from the material time derivativeof the volume-specimacrc kinetic-energy density K0 given in equation (418) as
raquo 0 DtK = DtK0 iexcl K Dt raquo 0 (432)
and thusraquo 0 DtK = Div(v cent sup1brvbar t) + v cent sup1bext
0 iexcl sup1brvbar t DtF (433)
Consequently we can identify the mass-specimacrc external and internal mechanicalpower sup1pext
0 and sup1pin t0 respectively
sup1pext0 = pext
0 iexcl KDt raquo 0 = Div(v cent sup1brvbar t) + v cent sup1b0
sup1pin t0 = pin t
0 = sup1brvbar t DtF
)(434)
It is worth noting that the diregerence of the mass- and volume-specimacrc formu-lation manifests itself only in the demacrnition of the external mechanical powersup1pext
0 = pext0 iexcl KDt raquo 0 while the mass-specimacrc internal power is identical to its volume-
specimacrc counterpart as sup1pin t0 = pin t
0 Consequently the material and the spatial versionof the mass-specimacrc balance of kinetic energy take the formats
raquo 0 DtK = sup1pext0 iexcl sup1pin t
0 raquo t dtK + raquo tv cent rxK = sup1pextt iexcl sup1pin t
t (435)
whereby both formulations are related through the corresponding Piola transformswith sup1pext
0 = J sup1pextt and sup1pin t
0 = Jsup1pin tt and the Euler theorem (24)
5 Balance of energy
The balance of total energy as a representation of the macrrst law of thermodynamicsbalances the rate of change of the volume-specimacrc total energy density E0 or Et asthe sum of the kinetic and internal energy density E0 = K0 + I0 or Et = Kt + It
with the external power In classical continuum mechanics of closed systems thisexternal power is composed of a purely mechanical contribution pext
0 or pextt and a
non-mechanical thermal contribution qext0 or qext
t Therefore the balance of energy issometimes referred to as the `principle of interconvertibility of heat and mechanicalworkrsquo a notion which was known to Carnot in 1832 and experimentally verimacredby Joule in 1843 However when dealing with open systems we have to generalizethe demacrnition of the non-mechanical external power by including additional externalopen-system contributions in the demacrnition of qext
0 and qextt (cf Malvern 1969 x 54)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2559
rsquo
F J DtF
B0 Bt
E0
v cent brvbar t Q
v cent b0 Q0
Et
v cent frac14 t q
v cent bt Qt
Figure 4 Balance of energy energy densities deg uxes and sources
(a) Volume-specimacrc version
For the spatial-motion problem the rate of change of the volume-specimacrc totalenergy density E0 = raquo 0E can be expressed in the form (cf macrgure 4)
DtE0 = Div(v cent sup1brvbar t iexcl sup1Q + ER) + v cent sup1b0 + sup1Q0 + ER0 iexcl rXE cent R (51)
Thereby in addition to the purely mechanical external power pext0 demacrned in equa-
tion (419) we have included the non-mechanical external power qext0 accounting
for the classical thermal eregects of the closed system and the additional open-systemeregects as an additional non-mechanical supply of energy
qext0 = Div( iexcl Q) + Q0 (52)
Similar to the mechanical power the non-mechanical power consists of a degux and asource contribution denoted by Q and Q0 respectively The former is composed ofthe reduced outward non-mechanical energy degux sup1Q modimacred by the explicit extradegux due to the open system IR while the latter is the sum of the reduced non-mechanical energy source sup1Q0 enhanced by the explicit eregects of the open systemIR0 and rXI cent R
pext0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R
qext0 = Div( iexcl sup1Q + IR) + sup1Q0 + IR0 iexcl rXI cent R
)
(53)
Equation (51) can thus be reformulated in the concise form
DtE0 = pext0 + qext
0 dtEt + div(Etv) = pextt + qext
t (54)
which for the classical closed-system case dates back to the early works of Duhem in1892 Again the spatial version (54)2 follows from the appropriate Piola transformsE0 = JEt
pext0 = Jpext
t qext0 = Jqext
t Q = Jq cent F iexclt and sup1Q = J sup1q cent F iexclt along withReynoldsrsquos transport theorem (211) The demacrnition of the non-mechanical energydeguxes Q and q parallels the introduction of the macrrst PiolaKirchhoreg stress tensorbrvbar and the Cauchy stress frac14 On the Neumann boundary the non-mechanical energydeguxes Q and q are given in terms of the normal projection of the classical heat deguxdensities qclos ed
0 and qclos edt and the additional open-system contributions qop en
0 andqop en
t Q cent N = qclos ed
0 + qop en0 qop en
0 = sup1q op en0 iexcl IR cent N
q cent n = qclos edt + qop en
t qop ent = sup1q op en
t iexcl Ir cent n
)(55)
Proc R Soc Lond A (2003)
2560 E Kuhl and P Steinmann
Moreover the non-mechanical energy sources Q0 and Qt can be understood as thesum of the classical heat source Qclos ed
0 and Qclos edt and an additional non-mechanical
energy source taking into account the nature of the open system Qop en0 and Qop en
t
Q0 = Qclos ed0 + Qop en
0 Qop en0 = sup1Qop en
0 + IR0 iexcl rXI cent R
Qt = Qclos edt + Qop en
t Qop ent = sup1Qop en
t + IRt iexcl rxI cent r
)(56)
In formal analogy to the demacrnition of the momentum quantities the expressions interms of R r R0 and Rt take into account the part of the newly added mass thatcarries the same amount of non-mechanical energy as the original substrate while theadditional open-system terms sup1q op en
0 sup1q op ent sup1Qop en
0 and sup1Qop ent account for a possible
diregerence in non-mechanical energy
Remark 51 (balance of internal energy) For further thermodynamical con-siderations it proves convenient to consider the volume-specimacrc internal energy den-sity I0 = E0 iexcl K0 or It = Et iexcl Kt given as the diregerence of the corresponding totalenergy density and the kinetic-energy density Consequently the two versions of thebalance of internal energy follow from subtracting the balance of kinetic energy (420)from the total energy balance (54)
DtI0 = pin t0 + qext
0 dtIt + div(Itv) = pin tt + qext
t (57)
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the equations derived above balances the mass-specimacrc energy density E = E0=raquo 0 with the mass-specimacrc external mechanical powersup1pext
0 introduced in (434) and the mass-specimacrc non-mechanical power sup1qext0 as
sup1qext0 = qext
0 iexcl IDt raquo 0 = iexcl Div sup1Q + sup1Q0 (58)
The corresponding balance equations
raquo 0 DtE = sup1pext0 + sup1qext
0 raquo t dtE + raquo tv cent rxE = sup1pextt + sup1qext
t (59)
follow from subtracting the corresponding balance of mass (35) weighted by the totalenergy E from the volume-specimacrc energy balance (54) The spatial version (59)2can be derived by applying the corresponding Piola transforms with sup1pext
0 = Jsup1pextt and
sup1qext0 = J sup1qext
t and the Euler theorem (24) Again we can relate the reduced energydeguxes sup1Q and sup1q demacrned through sup1Q = Q iexcl IR and sup1q = q iexcl Ir to the classical heatdegux qclos ed
0 or qclos edt and the energy degux caused by additional eregects of the open
system sup1q op en0 and sup1q op en
t
sup1Q cent N = qclos ed0 + sup1q op en
0
sup1q cent n = qclos edt + sup1q op en
t
)(510)
Moreover the reduced non-mechanical energy sources sup1Q0 and sup1Qt are given as the sumof the classical heat source of a closed system Qclos ed
0 and Qclos edt and the additional
open-system contribution to the energy sup1Qop en0 and sup1Qop en
t
sup1Q0 = Qclos ed0 + sup1Qop en
0
sup1Qt = Qclos edt + sup1Qop en
t
)(511)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2561
Again as opposed to the formulation developed by Epstein amp Maugin (2000) themass-specimacrc format is free from all the explicit extra terms caused by changes inmass and thus resembles the balance of energy known from classical mechanics
Remark 52 (balance of internal energy) A reduction to the balance ofinternal energy I = E iexcl K follows from subtracting the balance of kinetic energy(435) from the balance of total energy (59)
raquo 0 DtI = sup1pin t0 + sup1qext
0 raquo t dtI + raquo tv cent rxI = sup1pin tt + sup1qext
t (512)
6 Balance of entropy
The macrrst law of thermodynamics in the form of the balance of energy expressesthe interconvertibility of heat and work However the balance of energy itself doesnot place any restrictions on the direction of the thermodynamical process Thesecond law of thermodynamics the balance of entropy postulates the existence ofan absolute temperature and of a specimacrc entropy as a state function Through theinternal production of the latter which is required to either vanish for reversibleprocesses or be strictly positive for irreversible processes a direction is imposedon the thermodynamical process Recall that when dealing with open systems amacrxed material volume B0 is allowed to constantly gain or lose mass Open systemsnaturally exhibit an additional entropy degux and entropy source caused by the addedmass as pointed out earlier in the famous monograph by Schrodinger (1944 x 6) aswell as by Malvern (1969 x 56) or also recently by Epstein amp Maugin (2000) Theindeguence of changes in mass on the entropy is twofold On the one hand it is redegectedthrough the explicit open-system entropy degux SR and the related source terms SR0
and iexcl rXS cent R On the other hand we will introduce the reduced entropy degux andsource sup1H and sup1H0 respectively which in turn split into the extra non-mechanicalenergy terms sup1Q and sup1Q0 divided by the absolute temperature sup3 and an extra entropydegux and source S and S0 While the former parallel the introduction of the entropydegux and source in classical closed-system thermodynamics the contributions S andS0 account for the diregerence in entropy of the added mass and the original substrate
Remark 61 (balance of entropy versus entropy inequality) In the relatedliterature the entropy is often introduced through the entropy inequality For thesake of analogy we will treat the entropy as a balance quantity in the followingIts evolution is thus balanced with the sum of the external and internal entropyproduction whereby the latter is constrained to be non-negative throughout In thecase of closed-system thermodynamics this approach has been followed for exampleby Truesdell amp Toupin (1960 xx 256 and 257) Haupt (2000 x 33) or Liu (2002 x 5)
(a) Volume-specimacrc version
The balance of entropy balances the volume-specimacrc entropy density S0 = raquo 0S withthe external entropy input hext
0 and the internal entropy production hin t0 Thereby
the former consists of the entropy degux H across the material surface B0 and theentropy source H0 in the material domain B0 (cf macrgure 5)
hext0 = Div( iexcl H ) + H0 (61)
Proc R Soc Lond A (2003)
2562 E Kuhl and P Steinmann
rsquo
F J DtF
B0 Bt
S0
H S
H0 S0
St
h s
Ht St
Figure 5 Balance of entropy entropy densities deg uxes and sources
The external entropy degux H is introduced as the sum of the reduced external entropydegux sup1H enhanced by the explicit open-system contribution SR Accordingly theexternal entropy source H0 consists of the reduced entropy source sup1H0 modimacred byadditional terms SR0 and iexcl rXS cent R accounting for the explicit open-system con-tribution to the entropy supply
hext0 = Div( iexcl sup1H + SR) + sup1H0 + SR0 iexcl rXS cent R
hin t0 gt 0
)(62)
Just like in classical thermodynamics of closed systems the internal entropy produc-tion hin t
0 is required to be point-wise non-negative The balance of entropy can thusbe expressed in the following form
DtS0 = hext0 + hin t
0 dtSt + div(Stv) = hextt + hin t
t (63)
Again the material and the spatial version are related through the correspond-ing Piola transforms S0 = JSt
hext0 = Jhext
t hin t0 = Jhin t
t H = Jh cent F iexclt andsup1H = J sup1h cent F iexclt in combination with Reynoldsrsquos transport theorem Note that alter-
natively the balance of entropy which is primarily nothing but a formal demacrnitionof the entropy production can be recast into the inequality DtS0 iexcl hext
0 gt 0 Thiscondition which is typically referred to as `postulate of irreversibilityrsquo in classicalthermodynamics (see Truesdell amp Toupin 1960 x 258) induces a direction to thethermodynamic process Next we will introduce Neumann boundary conditions forthe spatial-motion Kirchhoreg and Cauchy type entropy degux H and h in terms of theclassical closed-system entropy degux contribution hclos ed
0 or hclos edt and the additional
open-system contribution hop en0 or hop en
t
H cent N = hclos ed0 + hop en
0 hop en0 = sup1hop en
0 iexcl SR cent N
h cent n = hclos edt + hop en
t hop ent = sup1hop en
t iexcl Sr cent n
)
(64)
Accordingly the entropy sources H0 and Ht are introduced as the sum of the classicalentropy source of the closed system Hclos ed
0 or Hclos edt and the additional entropy
source accounting for the nature of the open system Hop en0 or Hop en
t
H0 = Hclos ed0 + Hop en
0 Hop en0 = sup1Hop en
0 + SR0 iexcl rXS cent R
Ht = Hclos edt + Hop en
t Hop ent = sup1Hop en
t + SRt iexcl rxS cent r
)
(65)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2563
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the above equations states that the rate of changeof the mass-specimacrc entropy S = S0=raquo 0 is in equilibrium with the mass-specimacrcexternal entropy input sup1hext
0 and the mass-specimacrc internal entropy production sup1hin t0
which are introduced in the following way
sup1hext0 = hext
0 iexcl SDt raquo 0 = iexcl Div sup1H + sup1H0
sup1hin t0 = hin t
0 gt 0
)
(66)
The resulting material and spatial version of the balance of entropy
raquo 0 DtS = sup1hext0 + sup1hin t
0 raquo t dtS + raquo tv cent rxS = sup1hextt + sup1hin t
t (67)
which can be derived by subtracting S times the balance of mass (35) from thevolume-specimacrc balance of entropy (63) are related via the appropriate Piola trans-forms sup1hext
0 = Jsup1hextt and sup1hin t
0 = Jsup1hin tt and the Euler theorem (24) Moreover we can
relate the reduced entropy deguxes sup1H and sup1h demacrned through sup1H = H iexcl SR andsup1h = h iexcl Sr to the classical entropy degux of the closed system hclos ed
0 or hclos edt and
the entropy degux caused by additional eregects of the open system sup1hop en0 or sup1hop en
t
sup1H cent N = hclos ed0 + sup1hop en
0
sup1h cent n = hclos edt + sup1hop en
t
)(68)
Accordingly the reduced entropy sources sup1H0 = H0 iexcl SR0 + rXS cent R and sup1Ht = Ht iexclSRt + rxS cent r are given as the sum of the classical closed-system entropy sourceHclos ed
0 or Hclos edt and the additional open-system contribution to the entropy source
sup1Hop en0 or sup1Hop en
t sup1H0 = Hclos ed
0 + sup1Hop en0
sup1Ht = Hclos edt + sup1Hop en
t
)
(69)
Remark 62 (dissipation inequality) For further elaboration it proves con-venient to set up relations between the reduced entropy degux sup1H and the reducednon-mechanical energy degux sup1Q and between the reduced entropy source sup1H0 and thereduced non-mechanical energy source sup1Q0 in terms of the absolute temperature sup3 an extra entropy degux S and an extra entropy source S0
sup1H =1sup3
sup1Q + S sup1H0 =1sup3
sup1Q0 + S0 (610)
The above equations can be understood as a generalization of the ideas of Cowinamp Hegedus (1976) who have suggested including the additional entropy source S0
accounting for changes in entropy caused by changes in mass that are not consideredimplicitly through the changes in energy sup1Q0 Both the additional entropy degux S andthe entropy source S0 which we shall summarize in the term s
0 = iexcl Div S + S0 inthe following have to be determined constitutively These additional terms can beunderstood as an explicit representation of the exchange of entropy with the `outsideworldrsquo We now turn to the evaluation of the above-stated second law of thermo-dynamics by recasting it into an appropriate form of the dissipation inequality astatement that places further restrictions on the form of the constitutive response
Proc R Soc Lond A (2003)
2564 E Kuhl and P Steinmann
functions For this purpose we shall interpret the internal entropy production sup1hin t0 as
a measure for the degree of irreversibility introducing the dissipation rate sup1d0 as the
internal entropy production weighted by the absolute temperature as sup1d0 = sup3 sup1hin t
0 gt 0With the help of the balance of entropy (67)1 the relations (610) and the bal-ance of internal energy (512)1 the dissipation rate can be reformulated to yield theClausiusDuhem inequality in an internal energy based fashion
sup1d0 = sup1pin t
0 iexcl raquo 0Dt[I iexcl sup3 S ] iexcl raquo 0S Dt sup3 iexcl s0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (611)
By making use of the appropriate LegendreFenchel transform introducing theHelmholtz free energy ordf = I iexcl sup3 S we end up with the classical free-energy-basedversion of the ClausiusDuhem inequality
sup1d0 = sup1brvbar t DtF iexcl raquo 0 Dt ordf iexcl raquo 0S Dt sup3 iexcl s
0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (612)
which is particularly useful when the temperature sup3 rather than the entropy S isused as the independent variable In classical thermodynamics the ClausiusDuheminequality (612) is typically decomposed into a local and a conductive contributionsup1d loc
0 and sup1dcon0
sup1d loc0 = sup1brvbar t DtF iexcl raquo 0Dt ordf iexcl raquo 0SDt sup3 iexcl s
0 sup3 gt 0 sup1d con0 = iexcl sup1Q cent rX ln sup3 gt 0 (613)
whereby the local term sup1d loc0 gt 0 represents the ClausiusPlanck inequality for open
systems while the remaining conductive term sup1dcon0 gt 0 is typically referred to as a
Fourier inequality As a suplusmncient condition for sup1d0 gt 0 both inequalities are required
to hold separately In what follows we shall apply the dissipation inequality (613) toderive constitutive equations for the reduced momentum degux sup1brvbar t and the entropy SIn addition the evaluation of the dissipation inequality places further restrictions onthe extra entropy exchange s
0 The underlying procedure will be highlighted in detailfor the simple model problem of thermo-hyperelasticity in the following section
Remark 63 Note that at this stage the introduction of the reduced entropydegux and source sup1H = sup1Q=sup3 + S and sup1H0 = sup1Q0=sup3 + S0 as introduced in equations(610) is a mere constitutive assumption Nevertheless for particular constitutive-model problems the postulated relations can be verimacred through the evaluation ofthe dissipation inequality according to Muller (1973) and Liu (1972) (see also Liu2002) It will turn out that in most cases equations (610) are justimacred with thetrivial solution S = 0 and S0 = 0 However assuming this result from the veryoutset might be too restrictive for complex constitutive models as also pointed outby Epstein amp Maugin (2000)
7 Thermo-hyperelasticity
We are now in a position to exploit the second law of thermodynamics in the formof the ClausiusDuhem inequality along the lines of Coleman amp Noll (1963) Thestraightforward evaluation of the local part of the dissipation inequality in the formof the ClausiusPlanck inequality (613)1 will result in the demacrnition of the reducedmomentum degux sup1brvbar and the mass-specimacrc entropy density S Its conductive sup-plement (613)2 the Fourier inequality suggests the demacrnition of the reduced non-mechanical energy degux sup1Q along the lines of the classical linear heat conduction intro-duced by Fourier in 1822 Finally the mass degux R will be introduced constitutively
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2565
in the context of classical linear mass diregusion according to Fickrsquos law Here wewill thus restrict ourselves to a thermo-hyperelastic-model problem for which all thedissipation is caused exclusively by heat conduction and possibly by an additionalopen-system contribution of the `outside worldrsquo In what follows we shall make useof the multiplicative decomposition of the free energy ordf 0
ordf 0 = raquo 0 ordf (71)
Thereby the mass-specimacrc free-energy density ordf is expressed in terms of the materialdensity raquo 0 the deformation gradient F and the absolute temperature sup3 with a pos-sible explicit dependence on the material placement X Within the thermodynamicsof open systems the material density raquo 0 is allowed to vary in space and time is thusintroduced as function of the material placement X and the time t
ordf = ordf ( raquo 0 F sup3 X) raquo 0 = raquo 0(X t) (72)
Consequently the material time derivative of the free-energy density is formally givenin the form
Dt ordf = D raquo 0ordf Dt raquo 0 + DF ordf DtF + D sup3 ordf Dt sup3 (73)
The evaluation of the ClausiusPlanck inequality (613)1
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 + [ sup1brvbar t iexcl raquo 0DF ordf ] DtF iexcl [ raquo 0S + raquo 0 D sup3 ordf ] Dt sup3 iexcl s0 sup3 gt 0 (74)
demacrnes the reduced macrrst PiolaKirchhoreg stress tensor sup1brvbar t and the mass-specimacrcentropy S as thermodynamically conjugate variables to the deformation gradientF and the absolute temperature sup3
sup1brvbar t = raquo 0 DF ordf S = iexcl D sup3 ordf (75)
As in Cowin amp Hegedus (1976) we are left with a reduced inequality of the form
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 iexcl s0 sup3 gt 0 (76)
In biomechanics the simplest choice for the free-energy function ordf for cellular mate-rials such as open-pored biological tissues is based on the classical isotropic Neo-Hookean-type free-energy function weighted by the actual relative density [ raquo 0=raquo curren
0]n
(see for example Carter amp Hayes 1977 Gibson amp Ashby 1997)
ordf =middot
raquo 0
raquo curren0
cedil[niexcl1] 1raquo curren
0
[12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]] (77)
Here para and middot denote the classical Lamparae constants and n is an additional exponentusually allowed to vary between 1 6 n 6 35 A selection of more advanced free-energy functions for orthotropic biological tissues can be found for example in therecent collection of publications by Cowin amp Humphrey (2001) The derivatives of thefree energy ordf with respect to the material density raquo 0 and the deformation gradientF take the format
D raquo 0ordf = [n iexcl 1]
middotraquo 0
raquo curren0
cedil[niexcl2]middot 1raquo curren
0
cedil2
[ 12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]]
DF ordf =middot
raquo 0
raquo curren0
cedil[niexcl1]middot 1raquo curren
0
cedil[ middot F + [ para ln J iexcl middot ]F iexclt]
9gtgtgtgt=
gtgtgtgt
(78)
Proc R Soc Lond A (2003)
2566 E Kuhl and P Steinmann
whereby the macrrst derivative can alternatively be expressed as D raquo 0ordf = [n iexcl 1] ordf =raquo 0
According to equation (75) the reduced macrrst PiolaKirchhoreg stress tensor
sup1brvbar t =middot
raquo 0
raquo curren0
cediln
[ middot F + [ para ln J iexcl middot ]F iexclt] (79)
can be understood as the classical Neo-Hookean stress tensor weighted by the actualrelative density [ raquo 0=raquo curren
0]n The reduced dissipation inequality
iexcl [n iexcl 1] ordf [Div R + R0] + sup3 [Div S iexcl S0] gt 0 (710)
places implicit restrictions on the dissipation generated by the density evolution Dt raquo 0
through the mass degux R and the mass source R0 This amount of dissipation hasat least to be compensated by an appropriate constitutive assumption for the extraexternal entropy input s
0 through the extra entropy degux S and the extra entropysource S0 eg
S = [n iexcl 1] ordf1sup3
R S0 = iexcl [n iexcl 1] ordf1sup3
R0 (711)
Similar to the context of chemomechanics the degux r or R is usually related to thespatial or material gradient of the density rx raquo 0 or rX raquo 0 as
r = R0b cent rx raquo 0 R = rtB cent rX raquo 0 (712)
in analogy to Fickrsquos law for concentrations Here R0 and rt denote the mass-conduction coeplusmncient introducing either a materially or a spatially isotropicresponse In the context of biomechanics we typically macrnd variations of the con-stitutive equation
R0 =middot
raquo 0
raquo curren0
cediliexclm
ordf 0 iexcl ordf curren0 (713)
for the mass source R0 where raquo curren0 and ordf curren
0 denote the reference density and the refer-ence free energy respectively while m is an additional exponent that is commonlychosen to m gt n (see Harrigan amp Hamilton 1993) Finally the evaluation of theFourier inequality (613)2 as sup1d con
0 = iexcl sup1Q cent rX ln sup3 gt 0 suggests the demacrnition of themass-specimacrc non-mechanical energy degux sup1q or sup1Q according to Fourierrsquos law as
sup1q = iexcl K0b cent rx sup3 sup1Q = iexcl ktB cent rX sup3 (714)
with K0 and kt denoting the materially or spatially isotropic conductivity In order toa priori guarantee the satisfaction of the Fourier inequality (613)2 the conductivityis required to be non-negative K0 gt 0 and kt gt 0
8 Conclusion
We have presented a general framework for the thermodynamics of open systemsThe derived macreld equations are believed to be particularly useful in biomechanicalor chemomechanical applications where attention is conmacrned to one individual sub-system of the overall matter present Due to the fact that this open subsystem isallowed to constantly gain or lose mass the balance of mass had to be enhancedby additional surface and volume terms redegecting the interaction with the `outsideworldrsquo Since the newly created mass carries a particular amount of momentum
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2567
energy and entropy all the other balance equations had to be reformulated as wellTo clarify the indeguence of the changes in mass we have introduced the notions of`volume-specimacrcrsquo and `mass-specimacrcrsquo formats The former accounts for the total indegu-ence of the changes in mass through explicit mass-dependent and additional implicitopen-system contributions The latter however is free from all the mass-dependentextra terms and thus takes the familiar structure known from classical continuumthermodynamics The mass-specimacrc format is believed to be particularly useful sinceit parallels the framework of the closed-system case Consequently permissible con-stitutive relations can be derived from the mass-specimacrc version of the dissipationinequality The underlying procedure has been illustrated for the model problem ofthermo-hyperelasticity
References
Bowen R M 1976 Theory of mixtures In Continuum physics vol III Mixtures and EM macreldtheories (ed A C Eringen) pp 1127 Academic
Carter D R amp Hayes W C 1977 The behavior of bone as a two-phase porous structure JBone Joint Surg Am 59 785794
Coleman B D amp Noll W 1963 The thermodynamics of elastic materials with heat conductionand viscosity Arch Ration Mech Analysis 13 167178
Cowin S C amp Hegedus D H 1976 Bone remodelling I Theory of adaptive elasticity JElastic 6 313326
Cowin S C amp Humphrey J D 2001 Cardiovascular soft tissue mechanics Dordrecht Kluwer
de Boer R 2000 Theory of porous media Springer
Diebels S 2000 Mikropolare Zweiphasenmodelle Formulierung auf der Basis der TheoriePoroser Medien Habilitationsschrift Bericht aus dem Institut fur Mechanik (Bauwesen)Nr II-4 Universitat Stuttgart
Ehlers W 2002 Foundations of multiphasic and porous materials In Porous media theoryexperiments and numerical applications (ed W Ehlers amp J Bluhm) pp 386 Springer
Epstein M amp Maugin G A 2000 Thermomechanics of volumetric growth in uniform bodiesInt J Plasticity 16 951978
Gibson L J amp Ashby M F 1997 The mechanics of three-dimensional cellular materials ProcR Soc Lond A 382 4359
Goldstein H 1950 Classical mechanics Addison-Wesley
Harrigan T P amp Hamilton J J 1993 Finite element simulation of adaptive bone remodellinga stability criterion and a time-stepping method Int J Numer Meth Engng 36 837854
Haupt P 2000 Continuum mechanics and theory of materials Springer
Humphrey J D 2002 Cardiovasular solid mechanics Springer
Humphrey J D amp Rajagopal K R 2002 A constrained mixture model for growth and remod-eling of soft tissues Math Models Meth Appl Sci 12 407430
Liu I S 1972 Method of Lagrange multipliers for exploitation of the entropy principle ArchRation Mech Analysis 46 131148
Liu I S 2002 Continuum mechanics Springer
Malvern L E 1969 Introduction to the mechanics of a continuous medium Englewood Clireg sNJ Prentice Hall
Maugin G A 1993 Material inhomogenities in elasticity London Chapman amp Hall
Maugin G A 1999 The thermomechanics of nonlinear irreversible behaviors World Scientimacrc
Muller I 1973 Thermodynamik die Grundlagen der Materialtheorie Dusseldorf BertelsmannUniversitatsverlag
Proc R Soc Lond A (2003)
2568 E Kuhl and P Steinmann
Muller I 1994 Grundzuge der Thermodynamik Springer
Runesson K 1978 On nonlinear consolidation of soft clay PhD thesis Department of StructuralMechanics Chalmers University of Technology Goteborg Sweden
Schrodinger E 1944 What is life Cambridge University Press
Taber L A 1995 Biomechanics of growth remodeling and morphogenesis Appl Mech Rev48 487545
Truesdell C amp Toupin R 1960 The classical macreld theories In Handbuch der Physik (edS Flugge) vol 3 Springer
Wu T Hutter K amp Svendsen B 1998 On shear deg ow of a saturated icesediment mixture withthermodynamic equilibrium pressure and momentum exchange Proc R Soc Lond A 4547188
Proc R Soc Lond A (2003)

Thermodynamics for open systems 2559
rsquo
F J DtF
B0 Bt
E0
v cent brvbar t Q
v cent b0 Q0
Et
v cent frac14 t q
v cent bt Qt
Figure 4 Balance of energy energy densities deg uxes and sources
(a) Volume-specimacrc version
For the spatial-motion problem the rate of change of the volume-specimacrc totalenergy density E0 = raquo 0E can be expressed in the form (cf macrgure 4)
DtE0 = Div(v cent sup1brvbar t iexcl sup1Q + ER) + v cent sup1b0 + sup1Q0 + ER0 iexcl rXE cent R (51)
Thereby in addition to the purely mechanical external power pext0 demacrned in equa-
tion (419) we have included the non-mechanical external power qext0 accounting
for the classical thermal eregects of the closed system and the additional open-systemeregects as an additional non-mechanical supply of energy
qext0 = Div( iexcl Q) + Q0 (52)
Similar to the mechanical power the non-mechanical power consists of a degux and asource contribution denoted by Q and Q0 respectively The former is composed ofthe reduced outward non-mechanical energy degux sup1Q modimacred by the explicit extradegux due to the open system IR while the latter is the sum of the reduced non-mechanical energy source sup1Q0 enhanced by the explicit eregects of the open systemIR0 and rXI cent R
pext0 = Div(v cent sup1brvbar t + KR) + v cent sup1b0 + KR0 iexcl rXK cent R
qext0 = Div( iexcl sup1Q + IR) + sup1Q0 + IR0 iexcl rXI cent R
)
(53)
Equation (51) can thus be reformulated in the concise form
DtE0 = pext0 + qext
0 dtEt + div(Etv) = pextt + qext
t (54)
which for the classical closed-system case dates back to the early works of Duhem in1892 Again the spatial version (54)2 follows from the appropriate Piola transformsE0 = JEt
pext0 = Jpext
t qext0 = Jqext
t Q = Jq cent F iexclt and sup1Q = J sup1q cent F iexclt along withReynoldsrsquos transport theorem (211) The demacrnition of the non-mechanical energydeguxes Q and q parallels the introduction of the macrrst PiolaKirchhoreg stress tensorbrvbar and the Cauchy stress frac14 On the Neumann boundary the non-mechanical energydeguxes Q and q are given in terms of the normal projection of the classical heat deguxdensities qclos ed
0 and qclos edt and the additional open-system contributions qop en
0 andqop en
t Q cent N = qclos ed
0 + qop en0 qop en
0 = sup1q op en0 iexcl IR cent N
q cent n = qclos edt + qop en
t qop ent = sup1q op en
t iexcl Ir cent n
)(55)
Proc R Soc Lond A (2003)
2560 E Kuhl and P Steinmann
Moreover the non-mechanical energy sources Q0 and Qt can be understood as thesum of the classical heat source Qclos ed
0 and Qclos edt and an additional non-mechanical
energy source taking into account the nature of the open system Qop en0 and Qop en
t
Q0 = Qclos ed0 + Qop en
0 Qop en0 = sup1Qop en
0 + IR0 iexcl rXI cent R
Qt = Qclos edt + Qop en
t Qop ent = sup1Qop en
t + IRt iexcl rxI cent r
)(56)
In formal analogy to the demacrnition of the momentum quantities the expressions interms of R r R0 and Rt take into account the part of the newly added mass thatcarries the same amount of non-mechanical energy as the original substrate while theadditional open-system terms sup1q op en
0 sup1q op ent sup1Qop en
0 and sup1Qop ent account for a possible
diregerence in non-mechanical energy
Remark 51 (balance of internal energy) For further thermodynamical con-siderations it proves convenient to consider the volume-specimacrc internal energy den-sity I0 = E0 iexcl K0 or It = Et iexcl Kt given as the diregerence of the corresponding totalenergy density and the kinetic-energy density Consequently the two versions of thebalance of internal energy follow from subtracting the balance of kinetic energy (420)from the total energy balance (54)
DtI0 = pin t0 + qext
0 dtIt + div(Itv) = pin tt + qext
t (57)
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the equations derived above balances the mass-specimacrc energy density E = E0=raquo 0 with the mass-specimacrc external mechanical powersup1pext
0 introduced in (434) and the mass-specimacrc non-mechanical power sup1qext0 as
sup1qext0 = qext
0 iexcl IDt raquo 0 = iexcl Div sup1Q + sup1Q0 (58)
The corresponding balance equations
raquo 0 DtE = sup1pext0 + sup1qext
0 raquo t dtE + raquo tv cent rxE = sup1pextt + sup1qext
t (59)
follow from subtracting the corresponding balance of mass (35) weighted by the totalenergy E from the volume-specimacrc energy balance (54) The spatial version (59)2can be derived by applying the corresponding Piola transforms with sup1pext
0 = Jsup1pextt and
sup1qext0 = J sup1qext
t and the Euler theorem (24) Again we can relate the reduced energydeguxes sup1Q and sup1q demacrned through sup1Q = Q iexcl IR and sup1q = q iexcl Ir to the classical heatdegux qclos ed
0 or qclos edt and the energy degux caused by additional eregects of the open
system sup1q op en0 and sup1q op en
t
sup1Q cent N = qclos ed0 + sup1q op en
0
sup1q cent n = qclos edt + sup1q op en
t
)(510)
Moreover the reduced non-mechanical energy sources sup1Q0 and sup1Qt are given as the sumof the classical heat source of a closed system Qclos ed
0 and Qclos edt and the additional
open-system contribution to the energy sup1Qop en0 and sup1Qop en
t
sup1Q0 = Qclos ed0 + sup1Qop en
0
sup1Qt = Qclos edt + sup1Qop en
t
)(511)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2561
Again as opposed to the formulation developed by Epstein amp Maugin (2000) themass-specimacrc format is free from all the explicit extra terms caused by changes inmass and thus resembles the balance of energy known from classical mechanics
Remark 52 (balance of internal energy) A reduction to the balance ofinternal energy I = E iexcl K follows from subtracting the balance of kinetic energy(435) from the balance of total energy (59)
raquo 0 DtI = sup1pin t0 + sup1qext
0 raquo t dtI + raquo tv cent rxI = sup1pin tt + sup1qext
t (512)
6 Balance of entropy
The macrrst law of thermodynamics in the form of the balance of energy expressesthe interconvertibility of heat and work However the balance of energy itself doesnot place any restrictions on the direction of the thermodynamical process Thesecond law of thermodynamics the balance of entropy postulates the existence ofan absolute temperature and of a specimacrc entropy as a state function Through theinternal production of the latter which is required to either vanish for reversibleprocesses or be strictly positive for irreversible processes a direction is imposedon the thermodynamical process Recall that when dealing with open systems amacrxed material volume B0 is allowed to constantly gain or lose mass Open systemsnaturally exhibit an additional entropy degux and entropy source caused by the addedmass as pointed out earlier in the famous monograph by Schrodinger (1944 x 6) aswell as by Malvern (1969 x 56) or also recently by Epstein amp Maugin (2000) Theindeguence of changes in mass on the entropy is twofold On the one hand it is redegectedthrough the explicit open-system entropy degux SR and the related source terms SR0
and iexcl rXS cent R On the other hand we will introduce the reduced entropy degux andsource sup1H and sup1H0 respectively which in turn split into the extra non-mechanicalenergy terms sup1Q and sup1Q0 divided by the absolute temperature sup3 and an extra entropydegux and source S and S0 While the former parallel the introduction of the entropydegux and source in classical closed-system thermodynamics the contributions S andS0 account for the diregerence in entropy of the added mass and the original substrate
Remark 61 (balance of entropy versus entropy inequality) In the relatedliterature the entropy is often introduced through the entropy inequality For thesake of analogy we will treat the entropy as a balance quantity in the followingIts evolution is thus balanced with the sum of the external and internal entropyproduction whereby the latter is constrained to be non-negative throughout In thecase of closed-system thermodynamics this approach has been followed for exampleby Truesdell amp Toupin (1960 xx 256 and 257) Haupt (2000 x 33) or Liu (2002 x 5)
(a) Volume-specimacrc version
The balance of entropy balances the volume-specimacrc entropy density S0 = raquo 0S withthe external entropy input hext
0 and the internal entropy production hin t0 Thereby
the former consists of the entropy degux H across the material surface B0 and theentropy source H0 in the material domain B0 (cf macrgure 5)
hext0 = Div( iexcl H ) + H0 (61)
Proc R Soc Lond A (2003)
2562 E Kuhl and P Steinmann
rsquo
F J DtF
B0 Bt
S0
H S
H0 S0
St
h s
Ht St
Figure 5 Balance of entropy entropy densities deg uxes and sources
The external entropy degux H is introduced as the sum of the reduced external entropydegux sup1H enhanced by the explicit open-system contribution SR Accordingly theexternal entropy source H0 consists of the reduced entropy source sup1H0 modimacred byadditional terms SR0 and iexcl rXS cent R accounting for the explicit open-system con-tribution to the entropy supply
hext0 = Div( iexcl sup1H + SR) + sup1H0 + SR0 iexcl rXS cent R
hin t0 gt 0
)(62)
Just like in classical thermodynamics of closed systems the internal entropy produc-tion hin t
0 is required to be point-wise non-negative The balance of entropy can thusbe expressed in the following form
DtS0 = hext0 + hin t
0 dtSt + div(Stv) = hextt + hin t
t (63)
Again the material and the spatial version are related through the correspond-ing Piola transforms S0 = JSt
hext0 = Jhext
t hin t0 = Jhin t
t H = Jh cent F iexclt andsup1H = J sup1h cent F iexclt in combination with Reynoldsrsquos transport theorem Note that alter-
natively the balance of entropy which is primarily nothing but a formal demacrnitionof the entropy production can be recast into the inequality DtS0 iexcl hext
0 gt 0 Thiscondition which is typically referred to as `postulate of irreversibilityrsquo in classicalthermodynamics (see Truesdell amp Toupin 1960 x 258) induces a direction to thethermodynamic process Next we will introduce Neumann boundary conditions forthe spatial-motion Kirchhoreg and Cauchy type entropy degux H and h in terms of theclassical closed-system entropy degux contribution hclos ed
0 or hclos edt and the additional
open-system contribution hop en0 or hop en
t
H cent N = hclos ed0 + hop en
0 hop en0 = sup1hop en
0 iexcl SR cent N
h cent n = hclos edt + hop en
t hop ent = sup1hop en
t iexcl Sr cent n
)
(64)
Accordingly the entropy sources H0 and Ht are introduced as the sum of the classicalentropy source of the closed system Hclos ed
0 or Hclos edt and the additional entropy
source accounting for the nature of the open system Hop en0 or Hop en
t
H0 = Hclos ed0 + Hop en
0 Hop en0 = sup1Hop en
0 + SR0 iexcl rXS cent R
Ht = Hclos edt + Hop en
t Hop ent = sup1Hop en
t + SRt iexcl rxS cent r
)
(65)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2563
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the above equations states that the rate of changeof the mass-specimacrc entropy S = S0=raquo 0 is in equilibrium with the mass-specimacrcexternal entropy input sup1hext
0 and the mass-specimacrc internal entropy production sup1hin t0
which are introduced in the following way
sup1hext0 = hext
0 iexcl SDt raquo 0 = iexcl Div sup1H + sup1H0
sup1hin t0 = hin t
0 gt 0
)
(66)
The resulting material and spatial version of the balance of entropy
raquo 0 DtS = sup1hext0 + sup1hin t
0 raquo t dtS + raquo tv cent rxS = sup1hextt + sup1hin t
t (67)
which can be derived by subtracting S times the balance of mass (35) from thevolume-specimacrc balance of entropy (63) are related via the appropriate Piola trans-forms sup1hext
0 = Jsup1hextt and sup1hin t
0 = Jsup1hin tt and the Euler theorem (24) Moreover we can
relate the reduced entropy deguxes sup1H and sup1h demacrned through sup1H = H iexcl SR andsup1h = h iexcl Sr to the classical entropy degux of the closed system hclos ed
0 or hclos edt and
the entropy degux caused by additional eregects of the open system sup1hop en0 or sup1hop en
t
sup1H cent N = hclos ed0 + sup1hop en
0
sup1h cent n = hclos edt + sup1hop en
t
)(68)
Accordingly the reduced entropy sources sup1H0 = H0 iexcl SR0 + rXS cent R and sup1Ht = Ht iexclSRt + rxS cent r are given as the sum of the classical closed-system entropy sourceHclos ed
0 or Hclos edt and the additional open-system contribution to the entropy source
sup1Hop en0 or sup1Hop en
t sup1H0 = Hclos ed
0 + sup1Hop en0
sup1Ht = Hclos edt + sup1Hop en
t
)
(69)
Remark 62 (dissipation inequality) For further elaboration it proves con-venient to set up relations between the reduced entropy degux sup1H and the reducednon-mechanical energy degux sup1Q and between the reduced entropy source sup1H0 and thereduced non-mechanical energy source sup1Q0 in terms of the absolute temperature sup3 an extra entropy degux S and an extra entropy source S0
sup1H =1sup3
sup1Q + S sup1H0 =1sup3
sup1Q0 + S0 (610)
The above equations can be understood as a generalization of the ideas of Cowinamp Hegedus (1976) who have suggested including the additional entropy source S0
accounting for changes in entropy caused by changes in mass that are not consideredimplicitly through the changes in energy sup1Q0 Both the additional entropy degux S andthe entropy source S0 which we shall summarize in the term s
0 = iexcl Div S + S0 inthe following have to be determined constitutively These additional terms can beunderstood as an explicit representation of the exchange of entropy with the `outsideworldrsquo We now turn to the evaluation of the above-stated second law of thermo-dynamics by recasting it into an appropriate form of the dissipation inequality astatement that places further restrictions on the form of the constitutive response
Proc R Soc Lond A (2003)
2564 E Kuhl and P Steinmann
functions For this purpose we shall interpret the internal entropy production sup1hin t0 as
a measure for the degree of irreversibility introducing the dissipation rate sup1d0 as the
internal entropy production weighted by the absolute temperature as sup1d0 = sup3 sup1hin t
0 gt 0With the help of the balance of entropy (67)1 the relations (610) and the bal-ance of internal energy (512)1 the dissipation rate can be reformulated to yield theClausiusDuhem inequality in an internal energy based fashion
sup1d0 = sup1pin t
0 iexcl raquo 0Dt[I iexcl sup3 S ] iexcl raquo 0S Dt sup3 iexcl s0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (611)
By making use of the appropriate LegendreFenchel transform introducing theHelmholtz free energy ordf = I iexcl sup3 S we end up with the classical free-energy-basedversion of the ClausiusDuhem inequality
sup1d0 = sup1brvbar t DtF iexcl raquo 0 Dt ordf iexcl raquo 0S Dt sup3 iexcl s
0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (612)
which is particularly useful when the temperature sup3 rather than the entropy S isused as the independent variable In classical thermodynamics the ClausiusDuheminequality (612) is typically decomposed into a local and a conductive contributionsup1d loc
0 and sup1dcon0
sup1d loc0 = sup1brvbar t DtF iexcl raquo 0Dt ordf iexcl raquo 0SDt sup3 iexcl s
0 sup3 gt 0 sup1d con0 = iexcl sup1Q cent rX ln sup3 gt 0 (613)
whereby the local term sup1d loc0 gt 0 represents the ClausiusPlanck inequality for open
systems while the remaining conductive term sup1dcon0 gt 0 is typically referred to as a
Fourier inequality As a suplusmncient condition for sup1d0 gt 0 both inequalities are required
to hold separately In what follows we shall apply the dissipation inequality (613) toderive constitutive equations for the reduced momentum degux sup1brvbar t and the entropy SIn addition the evaluation of the dissipation inequality places further restrictions onthe extra entropy exchange s
0 The underlying procedure will be highlighted in detailfor the simple model problem of thermo-hyperelasticity in the following section
Remark 63 Note that at this stage the introduction of the reduced entropydegux and source sup1H = sup1Q=sup3 + S and sup1H0 = sup1Q0=sup3 + S0 as introduced in equations(610) is a mere constitutive assumption Nevertheless for particular constitutive-model problems the postulated relations can be verimacred through the evaluation ofthe dissipation inequality according to Muller (1973) and Liu (1972) (see also Liu2002) It will turn out that in most cases equations (610) are justimacred with thetrivial solution S = 0 and S0 = 0 However assuming this result from the veryoutset might be too restrictive for complex constitutive models as also pointed outby Epstein amp Maugin (2000)
7 Thermo-hyperelasticity
We are now in a position to exploit the second law of thermodynamics in the formof the ClausiusDuhem inequality along the lines of Coleman amp Noll (1963) Thestraightforward evaluation of the local part of the dissipation inequality in the formof the ClausiusPlanck inequality (613)1 will result in the demacrnition of the reducedmomentum degux sup1brvbar and the mass-specimacrc entropy density S Its conductive sup-plement (613)2 the Fourier inequality suggests the demacrnition of the reduced non-mechanical energy degux sup1Q along the lines of the classical linear heat conduction intro-duced by Fourier in 1822 Finally the mass degux R will be introduced constitutively
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2565
in the context of classical linear mass diregusion according to Fickrsquos law Here wewill thus restrict ourselves to a thermo-hyperelastic-model problem for which all thedissipation is caused exclusively by heat conduction and possibly by an additionalopen-system contribution of the `outside worldrsquo In what follows we shall make useof the multiplicative decomposition of the free energy ordf 0
ordf 0 = raquo 0 ordf (71)
Thereby the mass-specimacrc free-energy density ordf is expressed in terms of the materialdensity raquo 0 the deformation gradient F and the absolute temperature sup3 with a pos-sible explicit dependence on the material placement X Within the thermodynamicsof open systems the material density raquo 0 is allowed to vary in space and time is thusintroduced as function of the material placement X and the time t
ordf = ordf ( raquo 0 F sup3 X) raquo 0 = raquo 0(X t) (72)
Consequently the material time derivative of the free-energy density is formally givenin the form
Dt ordf = D raquo 0ordf Dt raquo 0 + DF ordf DtF + D sup3 ordf Dt sup3 (73)
The evaluation of the ClausiusPlanck inequality (613)1
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 + [ sup1brvbar t iexcl raquo 0DF ordf ] DtF iexcl [ raquo 0S + raquo 0 D sup3 ordf ] Dt sup3 iexcl s0 sup3 gt 0 (74)
demacrnes the reduced macrrst PiolaKirchhoreg stress tensor sup1brvbar t and the mass-specimacrcentropy S as thermodynamically conjugate variables to the deformation gradientF and the absolute temperature sup3
sup1brvbar t = raquo 0 DF ordf S = iexcl D sup3 ordf (75)
As in Cowin amp Hegedus (1976) we are left with a reduced inequality of the form
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 iexcl s0 sup3 gt 0 (76)
In biomechanics the simplest choice for the free-energy function ordf for cellular mate-rials such as open-pored biological tissues is based on the classical isotropic Neo-Hookean-type free-energy function weighted by the actual relative density [ raquo 0=raquo curren
0]n
(see for example Carter amp Hayes 1977 Gibson amp Ashby 1997)
ordf =middot
raquo 0
raquo curren0
cedil[niexcl1] 1raquo curren
0
[12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]] (77)
Here para and middot denote the classical Lamparae constants and n is an additional exponentusually allowed to vary between 1 6 n 6 35 A selection of more advanced free-energy functions for orthotropic biological tissues can be found for example in therecent collection of publications by Cowin amp Humphrey (2001) The derivatives of thefree energy ordf with respect to the material density raquo 0 and the deformation gradientF take the format
D raquo 0ordf = [n iexcl 1]
middotraquo 0
raquo curren0
cedil[niexcl2]middot 1raquo curren
0
cedil2
[ 12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]]
DF ordf =middot
raquo 0
raquo curren0
cedil[niexcl1]middot 1raquo curren
0
cedil[ middot F + [ para ln J iexcl middot ]F iexclt]
9gtgtgtgt=
gtgtgtgt
(78)
Proc R Soc Lond A (2003)
2566 E Kuhl and P Steinmann
whereby the macrrst derivative can alternatively be expressed as D raquo 0ordf = [n iexcl 1] ordf =raquo 0
According to equation (75) the reduced macrrst PiolaKirchhoreg stress tensor
sup1brvbar t =middot
raquo 0
raquo curren0
cediln
[ middot F + [ para ln J iexcl middot ]F iexclt] (79)
can be understood as the classical Neo-Hookean stress tensor weighted by the actualrelative density [ raquo 0=raquo curren
0]n The reduced dissipation inequality
iexcl [n iexcl 1] ordf [Div R + R0] + sup3 [Div S iexcl S0] gt 0 (710)
places implicit restrictions on the dissipation generated by the density evolution Dt raquo 0
through the mass degux R and the mass source R0 This amount of dissipation hasat least to be compensated by an appropriate constitutive assumption for the extraexternal entropy input s
0 through the extra entropy degux S and the extra entropysource S0 eg
S = [n iexcl 1] ordf1sup3
R S0 = iexcl [n iexcl 1] ordf1sup3
R0 (711)
Similar to the context of chemomechanics the degux r or R is usually related to thespatial or material gradient of the density rx raquo 0 or rX raquo 0 as
r = R0b cent rx raquo 0 R = rtB cent rX raquo 0 (712)
in analogy to Fickrsquos law for concentrations Here R0 and rt denote the mass-conduction coeplusmncient introducing either a materially or a spatially isotropicresponse In the context of biomechanics we typically macrnd variations of the con-stitutive equation
R0 =middot
raquo 0
raquo curren0
cediliexclm
ordf 0 iexcl ordf curren0 (713)
for the mass source R0 where raquo curren0 and ordf curren
0 denote the reference density and the refer-ence free energy respectively while m is an additional exponent that is commonlychosen to m gt n (see Harrigan amp Hamilton 1993) Finally the evaluation of theFourier inequality (613)2 as sup1d con
0 = iexcl sup1Q cent rX ln sup3 gt 0 suggests the demacrnition of themass-specimacrc non-mechanical energy degux sup1q or sup1Q according to Fourierrsquos law as
sup1q = iexcl K0b cent rx sup3 sup1Q = iexcl ktB cent rX sup3 (714)
with K0 and kt denoting the materially or spatially isotropic conductivity In order toa priori guarantee the satisfaction of the Fourier inequality (613)2 the conductivityis required to be non-negative K0 gt 0 and kt gt 0
8 Conclusion
We have presented a general framework for the thermodynamics of open systemsThe derived macreld equations are believed to be particularly useful in biomechanicalor chemomechanical applications where attention is conmacrned to one individual sub-system of the overall matter present Due to the fact that this open subsystem isallowed to constantly gain or lose mass the balance of mass had to be enhancedby additional surface and volume terms redegecting the interaction with the `outsideworldrsquo Since the newly created mass carries a particular amount of momentum
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2567
energy and entropy all the other balance equations had to be reformulated as wellTo clarify the indeguence of the changes in mass we have introduced the notions of`volume-specimacrcrsquo and `mass-specimacrcrsquo formats The former accounts for the total indegu-ence of the changes in mass through explicit mass-dependent and additional implicitopen-system contributions The latter however is free from all the mass-dependentextra terms and thus takes the familiar structure known from classical continuumthermodynamics The mass-specimacrc format is believed to be particularly useful sinceit parallels the framework of the closed-system case Consequently permissible con-stitutive relations can be derived from the mass-specimacrc version of the dissipationinequality The underlying procedure has been illustrated for the model problem ofthermo-hyperelasticity
References
Bowen R M 1976 Theory of mixtures In Continuum physics vol III Mixtures and EM macreldtheories (ed A C Eringen) pp 1127 Academic
Carter D R amp Hayes W C 1977 The behavior of bone as a two-phase porous structure JBone Joint Surg Am 59 785794
Coleman B D amp Noll W 1963 The thermodynamics of elastic materials with heat conductionand viscosity Arch Ration Mech Analysis 13 167178
Cowin S C amp Hegedus D H 1976 Bone remodelling I Theory of adaptive elasticity JElastic 6 313326
Cowin S C amp Humphrey J D 2001 Cardiovascular soft tissue mechanics Dordrecht Kluwer
de Boer R 2000 Theory of porous media Springer
Diebels S 2000 Mikropolare Zweiphasenmodelle Formulierung auf der Basis der TheoriePoroser Medien Habilitationsschrift Bericht aus dem Institut fur Mechanik (Bauwesen)Nr II-4 Universitat Stuttgart
Ehlers W 2002 Foundations of multiphasic and porous materials In Porous media theoryexperiments and numerical applications (ed W Ehlers amp J Bluhm) pp 386 Springer
Epstein M amp Maugin G A 2000 Thermomechanics of volumetric growth in uniform bodiesInt J Plasticity 16 951978
Gibson L J amp Ashby M F 1997 The mechanics of three-dimensional cellular materials ProcR Soc Lond A 382 4359
Goldstein H 1950 Classical mechanics Addison-Wesley
Harrigan T P amp Hamilton J J 1993 Finite element simulation of adaptive bone remodellinga stability criterion and a time-stepping method Int J Numer Meth Engng 36 837854
Haupt P 2000 Continuum mechanics and theory of materials Springer
Humphrey J D 2002 Cardiovasular solid mechanics Springer
Humphrey J D amp Rajagopal K R 2002 A constrained mixture model for growth and remod-eling of soft tissues Math Models Meth Appl Sci 12 407430
Liu I S 1972 Method of Lagrange multipliers for exploitation of the entropy principle ArchRation Mech Analysis 46 131148
Liu I S 2002 Continuum mechanics Springer
Malvern L E 1969 Introduction to the mechanics of a continuous medium Englewood Clireg sNJ Prentice Hall
Maugin G A 1993 Material inhomogenities in elasticity London Chapman amp Hall
Maugin G A 1999 The thermomechanics of nonlinear irreversible behaviors World Scientimacrc
Muller I 1973 Thermodynamik die Grundlagen der Materialtheorie Dusseldorf BertelsmannUniversitatsverlag
Proc R Soc Lond A (2003)
2568 E Kuhl and P Steinmann
Muller I 1994 Grundzuge der Thermodynamik Springer
Runesson K 1978 On nonlinear consolidation of soft clay PhD thesis Department of StructuralMechanics Chalmers University of Technology Goteborg Sweden
Schrodinger E 1944 What is life Cambridge University Press
Taber L A 1995 Biomechanics of growth remodeling and morphogenesis Appl Mech Rev48 487545
Truesdell C amp Toupin R 1960 The classical macreld theories In Handbuch der Physik (edS Flugge) vol 3 Springer
Wu T Hutter K amp Svendsen B 1998 On shear deg ow of a saturated icesediment mixture withthermodynamic equilibrium pressure and momentum exchange Proc R Soc Lond A 4547188
Proc R Soc Lond A (2003)

2560 E Kuhl and P Steinmann
Moreover the non-mechanical energy sources Q0 and Qt can be understood as thesum of the classical heat source Qclos ed
0 and Qclos edt and an additional non-mechanical
energy source taking into account the nature of the open system Qop en0 and Qop en
t
Q0 = Qclos ed0 + Qop en
0 Qop en0 = sup1Qop en
0 + IR0 iexcl rXI cent R
Qt = Qclos edt + Qop en
t Qop ent = sup1Qop en
t + IRt iexcl rxI cent r
)(56)
In formal analogy to the demacrnition of the momentum quantities the expressions interms of R r R0 and Rt take into account the part of the newly added mass thatcarries the same amount of non-mechanical energy as the original substrate while theadditional open-system terms sup1q op en
0 sup1q op ent sup1Qop en
0 and sup1Qop ent account for a possible
diregerence in non-mechanical energy
Remark 51 (balance of internal energy) For further thermodynamical con-siderations it proves convenient to consider the volume-specimacrc internal energy den-sity I0 = E0 iexcl K0 or It = Et iexcl Kt given as the diregerence of the corresponding totalenergy density and the kinetic-energy density Consequently the two versions of thebalance of internal energy follow from subtracting the balance of kinetic energy (420)from the total energy balance (54)
DtI0 = pin t0 + qext
0 dtIt + div(Itv) = pin tt + qext
t (57)
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the equations derived above balances the mass-specimacrc energy density E = E0=raquo 0 with the mass-specimacrc external mechanical powersup1pext
0 introduced in (434) and the mass-specimacrc non-mechanical power sup1qext0 as
sup1qext0 = qext
0 iexcl IDt raquo 0 = iexcl Div sup1Q + sup1Q0 (58)
The corresponding balance equations
raquo 0 DtE = sup1pext0 + sup1qext
0 raquo t dtE + raquo tv cent rxE = sup1pextt + sup1qext
t (59)
follow from subtracting the corresponding balance of mass (35) weighted by the totalenergy E from the volume-specimacrc energy balance (54) The spatial version (59)2can be derived by applying the corresponding Piola transforms with sup1pext
0 = Jsup1pextt and
sup1qext0 = J sup1qext
t and the Euler theorem (24) Again we can relate the reduced energydeguxes sup1Q and sup1q demacrned through sup1Q = Q iexcl IR and sup1q = q iexcl Ir to the classical heatdegux qclos ed
0 or qclos edt and the energy degux caused by additional eregects of the open
system sup1q op en0 and sup1q op en
t
sup1Q cent N = qclos ed0 + sup1q op en
0
sup1q cent n = qclos edt + sup1q op en
t
)(510)
Moreover the reduced non-mechanical energy sources sup1Q0 and sup1Qt are given as the sumof the classical heat source of a closed system Qclos ed
0 and Qclos edt and the additional
open-system contribution to the energy sup1Qop en0 and sup1Qop en
t
sup1Q0 = Qclos ed0 + sup1Qop en
0
sup1Qt = Qclos edt + sup1Qop en
t
)(511)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2561
Again as opposed to the formulation developed by Epstein amp Maugin (2000) themass-specimacrc format is free from all the explicit extra terms caused by changes inmass and thus resembles the balance of energy known from classical mechanics
Remark 52 (balance of internal energy) A reduction to the balance ofinternal energy I = E iexcl K follows from subtracting the balance of kinetic energy(435) from the balance of total energy (59)
raquo 0 DtI = sup1pin t0 + sup1qext
0 raquo t dtI + raquo tv cent rxI = sup1pin tt + sup1qext
t (512)
6 Balance of entropy
The macrrst law of thermodynamics in the form of the balance of energy expressesthe interconvertibility of heat and work However the balance of energy itself doesnot place any restrictions on the direction of the thermodynamical process Thesecond law of thermodynamics the balance of entropy postulates the existence ofan absolute temperature and of a specimacrc entropy as a state function Through theinternal production of the latter which is required to either vanish for reversibleprocesses or be strictly positive for irreversible processes a direction is imposedon the thermodynamical process Recall that when dealing with open systems amacrxed material volume B0 is allowed to constantly gain or lose mass Open systemsnaturally exhibit an additional entropy degux and entropy source caused by the addedmass as pointed out earlier in the famous monograph by Schrodinger (1944 x 6) aswell as by Malvern (1969 x 56) or also recently by Epstein amp Maugin (2000) Theindeguence of changes in mass on the entropy is twofold On the one hand it is redegectedthrough the explicit open-system entropy degux SR and the related source terms SR0
and iexcl rXS cent R On the other hand we will introduce the reduced entropy degux andsource sup1H and sup1H0 respectively which in turn split into the extra non-mechanicalenergy terms sup1Q and sup1Q0 divided by the absolute temperature sup3 and an extra entropydegux and source S and S0 While the former parallel the introduction of the entropydegux and source in classical closed-system thermodynamics the contributions S andS0 account for the diregerence in entropy of the added mass and the original substrate
Remark 61 (balance of entropy versus entropy inequality) In the relatedliterature the entropy is often introduced through the entropy inequality For thesake of analogy we will treat the entropy as a balance quantity in the followingIts evolution is thus balanced with the sum of the external and internal entropyproduction whereby the latter is constrained to be non-negative throughout In thecase of closed-system thermodynamics this approach has been followed for exampleby Truesdell amp Toupin (1960 xx 256 and 257) Haupt (2000 x 33) or Liu (2002 x 5)
(a) Volume-specimacrc version
The balance of entropy balances the volume-specimacrc entropy density S0 = raquo 0S withthe external entropy input hext
0 and the internal entropy production hin t0 Thereby
the former consists of the entropy degux H across the material surface B0 and theentropy source H0 in the material domain B0 (cf macrgure 5)
hext0 = Div( iexcl H ) + H0 (61)
Proc R Soc Lond A (2003)
2562 E Kuhl and P Steinmann
rsquo
F J DtF
B0 Bt
S0
H S
H0 S0
St
h s
Ht St
Figure 5 Balance of entropy entropy densities deg uxes and sources
The external entropy degux H is introduced as the sum of the reduced external entropydegux sup1H enhanced by the explicit open-system contribution SR Accordingly theexternal entropy source H0 consists of the reduced entropy source sup1H0 modimacred byadditional terms SR0 and iexcl rXS cent R accounting for the explicit open-system con-tribution to the entropy supply
hext0 = Div( iexcl sup1H + SR) + sup1H0 + SR0 iexcl rXS cent R
hin t0 gt 0
)(62)
Just like in classical thermodynamics of closed systems the internal entropy produc-tion hin t
0 is required to be point-wise non-negative The balance of entropy can thusbe expressed in the following form
DtS0 = hext0 + hin t
0 dtSt + div(Stv) = hextt + hin t
t (63)
Again the material and the spatial version are related through the correspond-ing Piola transforms S0 = JSt
hext0 = Jhext
t hin t0 = Jhin t
t H = Jh cent F iexclt andsup1H = J sup1h cent F iexclt in combination with Reynoldsrsquos transport theorem Note that alter-
natively the balance of entropy which is primarily nothing but a formal demacrnitionof the entropy production can be recast into the inequality DtS0 iexcl hext
0 gt 0 Thiscondition which is typically referred to as `postulate of irreversibilityrsquo in classicalthermodynamics (see Truesdell amp Toupin 1960 x 258) induces a direction to thethermodynamic process Next we will introduce Neumann boundary conditions forthe spatial-motion Kirchhoreg and Cauchy type entropy degux H and h in terms of theclassical closed-system entropy degux contribution hclos ed
0 or hclos edt and the additional
open-system contribution hop en0 or hop en
t
H cent N = hclos ed0 + hop en
0 hop en0 = sup1hop en
0 iexcl SR cent N
h cent n = hclos edt + hop en
t hop ent = sup1hop en
t iexcl Sr cent n
)
(64)
Accordingly the entropy sources H0 and Ht are introduced as the sum of the classicalentropy source of the closed system Hclos ed
0 or Hclos edt and the additional entropy
source accounting for the nature of the open system Hop en0 or Hop en
t
H0 = Hclos ed0 + Hop en
0 Hop en0 = sup1Hop en
0 + SR0 iexcl rXS cent R
Ht = Hclos edt + Hop en
t Hop ent = sup1Hop en
t + SRt iexcl rxS cent r
)
(65)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2563
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the above equations states that the rate of changeof the mass-specimacrc entropy S = S0=raquo 0 is in equilibrium with the mass-specimacrcexternal entropy input sup1hext
0 and the mass-specimacrc internal entropy production sup1hin t0
which are introduced in the following way
sup1hext0 = hext
0 iexcl SDt raquo 0 = iexcl Div sup1H + sup1H0
sup1hin t0 = hin t
0 gt 0
)
(66)
The resulting material and spatial version of the balance of entropy
raquo 0 DtS = sup1hext0 + sup1hin t
0 raquo t dtS + raquo tv cent rxS = sup1hextt + sup1hin t
t (67)
which can be derived by subtracting S times the balance of mass (35) from thevolume-specimacrc balance of entropy (63) are related via the appropriate Piola trans-forms sup1hext
0 = Jsup1hextt and sup1hin t
0 = Jsup1hin tt and the Euler theorem (24) Moreover we can
relate the reduced entropy deguxes sup1H and sup1h demacrned through sup1H = H iexcl SR andsup1h = h iexcl Sr to the classical entropy degux of the closed system hclos ed
0 or hclos edt and
the entropy degux caused by additional eregects of the open system sup1hop en0 or sup1hop en
t
sup1H cent N = hclos ed0 + sup1hop en
0
sup1h cent n = hclos edt + sup1hop en
t
)(68)
Accordingly the reduced entropy sources sup1H0 = H0 iexcl SR0 + rXS cent R and sup1Ht = Ht iexclSRt + rxS cent r are given as the sum of the classical closed-system entropy sourceHclos ed
0 or Hclos edt and the additional open-system contribution to the entropy source
sup1Hop en0 or sup1Hop en
t sup1H0 = Hclos ed
0 + sup1Hop en0
sup1Ht = Hclos edt + sup1Hop en
t
)
(69)
Remark 62 (dissipation inequality) For further elaboration it proves con-venient to set up relations between the reduced entropy degux sup1H and the reducednon-mechanical energy degux sup1Q and between the reduced entropy source sup1H0 and thereduced non-mechanical energy source sup1Q0 in terms of the absolute temperature sup3 an extra entropy degux S and an extra entropy source S0
sup1H =1sup3
sup1Q + S sup1H0 =1sup3
sup1Q0 + S0 (610)
The above equations can be understood as a generalization of the ideas of Cowinamp Hegedus (1976) who have suggested including the additional entropy source S0
accounting for changes in entropy caused by changes in mass that are not consideredimplicitly through the changes in energy sup1Q0 Both the additional entropy degux S andthe entropy source S0 which we shall summarize in the term s
0 = iexcl Div S + S0 inthe following have to be determined constitutively These additional terms can beunderstood as an explicit representation of the exchange of entropy with the `outsideworldrsquo We now turn to the evaluation of the above-stated second law of thermo-dynamics by recasting it into an appropriate form of the dissipation inequality astatement that places further restrictions on the form of the constitutive response
Proc R Soc Lond A (2003)
2564 E Kuhl and P Steinmann
functions For this purpose we shall interpret the internal entropy production sup1hin t0 as
a measure for the degree of irreversibility introducing the dissipation rate sup1d0 as the
internal entropy production weighted by the absolute temperature as sup1d0 = sup3 sup1hin t
0 gt 0With the help of the balance of entropy (67)1 the relations (610) and the bal-ance of internal energy (512)1 the dissipation rate can be reformulated to yield theClausiusDuhem inequality in an internal energy based fashion
sup1d0 = sup1pin t
0 iexcl raquo 0Dt[I iexcl sup3 S ] iexcl raquo 0S Dt sup3 iexcl s0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (611)
By making use of the appropriate LegendreFenchel transform introducing theHelmholtz free energy ordf = I iexcl sup3 S we end up with the classical free-energy-basedversion of the ClausiusDuhem inequality
sup1d0 = sup1brvbar t DtF iexcl raquo 0 Dt ordf iexcl raquo 0S Dt sup3 iexcl s
0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (612)
which is particularly useful when the temperature sup3 rather than the entropy S isused as the independent variable In classical thermodynamics the ClausiusDuheminequality (612) is typically decomposed into a local and a conductive contributionsup1d loc
0 and sup1dcon0
sup1d loc0 = sup1brvbar t DtF iexcl raquo 0Dt ordf iexcl raquo 0SDt sup3 iexcl s
0 sup3 gt 0 sup1d con0 = iexcl sup1Q cent rX ln sup3 gt 0 (613)
whereby the local term sup1d loc0 gt 0 represents the ClausiusPlanck inequality for open
systems while the remaining conductive term sup1dcon0 gt 0 is typically referred to as a
Fourier inequality As a suplusmncient condition for sup1d0 gt 0 both inequalities are required
to hold separately In what follows we shall apply the dissipation inequality (613) toderive constitutive equations for the reduced momentum degux sup1brvbar t and the entropy SIn addition the evaluation of the dissipation inequality places further restrictions onthe extra entropy exchange s
0 The underlying procedure will be highlighted in detailfor the simple model problem of thermo-hyperelasticity in the following section
Remark 63 Note that at this stage the introduction of the reduced entropydegux and source sup1H = sup1Q=sup3 + S and sup1H0 = sup1Q0=sup3 + S0 as introduced in equations(610) is a mere constitutive assumption Nevertheless for particular constitutive-model problems the postulated relations can be verimacred through the evaluation ofthe dissipation inequality according to Muller (1973) and Liu (1972) (see also Liu2002) It will turn out that in most cases equations (610) are justimacred with thetrivial solution S = 0 and S0 = 0 However assuming this result from the veryoutset might be too restrictive for complex constitutive models as also pointed outby Epstein amp Maugin (2000)
7 Thermo-hyperelasticity
We are now in a position to exploit the second law of thermodynamics in the formof the ClausiusDuhem inequality along the lines of Coleman amp Noll (1963) Thestraightforward evaluation of the local part of the dissipation inequality in the formof the ClausiusPlanck inequality (613)1 will result in the demacrnition of the reducedmomentum degux sup1brvbar and the mass-specimacrc entropy density S Its conductive sup-plement (613)2 the Fourier inequality suggests the demacrnition of the reduced non-mechanical energy degux sup1Q along the lines of the classical linear heat conduction intro-duced by Fourier in 1822 Finally the mass degux R will be introduced constitutively
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2565
in the context of classical linear mass diregusion according to Fickrsquos law Here wewill thus restrict ourselves to a thermo-hyperelastic-model problem for which all thedissipation is caused exclusively by heat conduction and possibly by an additionalopen-system contribution of the `outside worldrsquo In what follows we shall make useof the multiplicative decomposition of the free energy ordf 0
ordf 0 = raquo 0 ordf (71)
Thereby the mass-specimacrc free-energy density ordf is expressed in terms of the materialdensity raquo 0 the deformation gradient F and the absolute temperature sup3 with a pos-sible explicit dependence on the material placement X Within the thermodynamicsof open systems the material density raquo 0 is allowed to vary in space and time is thusintroduced as function of the material placement X and the time t
ordf = ordf ( raquo 0 F sup3 X) raquo 0 = raquo 0(X t) (72)
Consequently the material time derivative of the free-energy density is formally givenin the form
Dt ordf = D raquo 0ordf Dt raquo 0 + DF ordf DtF + D sup3 ordf Dt sup3 (73)
The evaluation of the ClausiusPlanck inequality (613)1
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 + [ sup1brvbar t iexcl raquo 0DF ordf ] DtF iexcl [ raquo 0S + raquo 0 D sup3 ordf ] Dt sup3 iexcl s0 sup3 gt 0 (74)
demacrnes the reduced macrrst PiolaKirchhoreg stress tensor sup1brvbar t and the mass-specimacrcentropy S as thermodynamically conjugate variables to the deformation gradientF and the absolute temperature sup3
sup1brvbar t = raquo 0 DF ordf S = iexcl D sup3 ordf (75)
As in Cowin amp Hegedus (1976) we are left with a reduced inequality of the form
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 iexcl s0 sup3 gt 0 (76)
In biomechanics the simplest choice for the free-energy function ordf for cellular mate-rials such as open-pored biological tissues is based on the classical isotropic Neo-Hookean-type free-energy function weighted by the actual relative density [ raquo 0=raquo curren
0]n
(see for example Carter amp Hayes 1977 Gibson amp Ashby 1997)
ordf =middot
raquo 0
raquo curren0
cedil[niexcl1] 1raquo curren
0
[12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]] (77)
Here para and middot denote the classical Lamparae constants and n is an additional exponentusually allowed to vary between 1 6 n 6 35 A selection of more advanced free-energy functions for orthotropic biological tissues can be found for example in therecent collection of publications by Cowin amp Humphrey (2001) The derivatives of thefree energy ordf with respect to the material density raquo 0 and the deformation gradientF take the format
D raquo 0ordf = [n iexcl 1]
middotraquo 0
raquo curren0
cedil[niexcl2]middot 1raquo curren
0
cedil2
[ 12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]]
DF ordf =middot
raquo 0
raquo curren0
cedil[niexcl1]middot 1raquo curren
0
cedil[ middot F + [ para ln J iexcl middot ]F iexclt]
9gtgtgtgt=
gtgtgtgt
(78)
Proc R Soc Lond A (2003)
2566 E Kuhl and P Steinmann
whereby the macrrst derivative can alternatively be expressed as D raquo 0ordf = [n iexcl 1] ordf =raquo 0
According to equation (75) the reduced macrrst PiolaKirchhoreg stress tensor
sup1brvbar t =middot
raquo 0
raquo curren0
cediln
[ middot F + [ para ln J iexcl middot ]F iexclt] (79)
can be understood as the classical Neo-Hookean stress tensor weighted by the actualrelative density [ raquo 0=raquo curren
0]n The reduced dissipation inequality
iexcl [n iexcl 1] ordf [Div R + R0] + sup3 [Div S iexcl S0] gt 0 (710)
places implicit restrictions on the dissipation generated by the density evolution Dt raquo 0
through the mass degux R and the mass source R0 This amount of dissipation hasat least to be compensated by an appropriate constitutive assumption for the extraexternal entropy input s
0 through the extra entropy degux S and the extra entropysource S0 eg
S = [n iexcl 1] ordf1sup3
R S0 = iexcl [n iexcl 1] ordf1sup3
R0 (711)
Similar to the context of chemomechanics the degux r or R is usually related to thespatial or material gradient of the density rx raquo 0 or rX raquo 0 as
r = R0b cent rx raquo 0 R = rtB cent rX raquo 0 (712)
in analogy to Fickrsquos law for concentrations Here R0 and rt denote the mass-conduction coeplusmncient introducing either a materially or a spatially isotropicresponse In the context of biomechanics we typically macrnd variations of the con-stitutive equation
R0 =middot
raquo 0
raquo curren0
cediliexclm
ordf 0 iexcl ordf curren0 (713)
for the mass source R0 where raquo curren0 and ordf curren
0 denote the reference density and the refer-ence free energy respectively while m is an additional exponent that is commonlychosen to m gt n (see Harrigan amp Hamilton 1993) Finally the evaluation of theFourier inequality (613)2 as sup1d con
0 = iexcl sup1Q cent rX ln sup3 gt 0 suggests the demacrnition of themass-specimacrc non-mechanical energy degux sup1q or sup1Q according to Fourierrsquos law as
sup1q = iexcl K0b cent rx sup3 sup1Q = iexcl ktB cent rX sup3 (714)
with K0 and kt denoting the materially or spatially isotropic conductivity In order toa priori guarantee the satisfaction of the Fourier inequality (613)2 the conductivityis required to be non-negative K0 gt 0 and kt gt 0
8 Conclusion
We have presented a general framework for the thermodynamics of open systemsThe derived macreld equations are believed to be particularly useful in biomechanicalor chemomechanical applications where attention is conmacrned to one individual sub-system of the overall matter present Due to the fact that this open subsystem isallowed to constantly gain or lose mass the balance of mass had to be enhancedby additional surface and volume terms redegecting the interaction with the `outsideworldrsquo Since the newly created mass carries a particular amount of momentum
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2567
energy and entropy all the other balance equations had to be reformulated as wellTo clarify the indeguence of the changes in mass we have introduced the notions of`volume-specimacrcrsquo and `mass-specimacrcrsquo formats The former accounts for the total indegu-ence of the changes in mass through explicit mass-dependent and additional implicitopen-system contributions The latter however is free from all the mass-dependentextra terms and thus takes the familiar structure known from classical continuumthermodynamics The mass-specimacrc format is believed to be particularly useful sinceit parallels the framework of the closed-system case Consequently permissible con-stitutive relations can be derived from the mass-specimacrc version of the dissipationinequality The underlying procedure has been illustrated for the model problem ofthermo-hyperelasticity
References
Bowen R M 1976 Theory of mixtures In Continuum physics vol III Mixtures and EM macreldtheories (ed A C Eringen) pp 1127 Academic
Carter D R amp Hayes W C 1977 The behavior of bone as a two-phase porous structure JBone Joint Surg Am 59 785794
Coleman B D amp Noll W 1963 The thermodynamics of elastic materials with heat conductionand viscosity Arch Ration Mech Analysis 13 167178
Cowin S C amp Hegedus D H 1976 Bone remodelling I Theory of adaptive elasticity JElastic 6 313326
Cowin S C amp Humphrey J D 2001 Cardiovascular soft tissue mechanics Dordrecht Kluwer
de Boer R 2000 Theory of porous media Springer
Diebels S 2000 Mikropolare Zweiphasenmodelle Formulierung auf der Basis der TheoriePoroser Medien Habilitationsschrift Bericht aus dem Institut fur Mechanik (Bauwesen)Nr II-4 Universitat Stuttgart
Ehlers W 2002 Foundations of multiphasic and porous materials In Porous media theoryexperiments and numerical applications (ed W Ehlers amp J Bluhm) pp 386 Springer
Epstein M amp Maugin G A 2000 Thermomechanics of volumetric growth in uniform bodiesInt J Plasticity 16 951978
Gibson L J amp Ashby M F 1997 The mechanics of three-dimensional cellular materials ProcR Soc Lond A 382 4359
Goldstein H 1950 Classical mechanics Addison-Wesley
Harrigan T P amp Hamilton J J 1993 Finite element simulation of adaptive bone remodellinga stability criterion and a time-stepping method Int J Numer Meth Engng 36 837854
Haupt P 2000 Continuum mechanics and theory of materials Springer
Humphrey J D 2002 Cardiovasular solid mechanics Springer
Humphrey J D amp Rajagopal K R 2002 A constrained mixture model for growth and remod-eling of soft tissues Math Models Meth Appl Sci 12 407430
Liu I S 1972 Method of Lagrange multipliers for exploitation of the entropy principle ArchRation Mech Analysis 46 131148
Liu I S 2002 Continuum mechanics Springer
Malvern L E 1969 Introduction to the mechanics of a continuous medium Englewood Clireg sNJ Prentice Hall
Maugin G A 1993 Material inhomogenities in elasticity London Chapman amp Hall
Maugin G A 1999 The thermomechanics of nonlinear irreversible behaviors World Scientimacrc
Muller I 1973 Thermodynamik die Grundlagen der Materialtheorie Dusseldorf BertelsmannUniversitatsverlag
Proc R Soc Lond A (2003)
2568 E Kuhl and P Steinmann
Muller I 1994 Grundzuge der Thermodynamik Springer
Runesson K 1978 On nonlinear consolidation of soft clay PhD thesis Department of StructuralMechanics Chalmers University of Technology Goteborg Sweden
Schrodinger E 1944 What is life Cambridge University Press
Taber L A 1995 Biomechanics of growth remodeling and morphogenesis Appl Mech Rev48 487545
Truesdell C amp Toupin R 1960 The classical macreld theories In Handbuch der Physik (edS Flugge) vol 3 Springer
Wu T Hutter K amp Svendsen B 1998 On shear deg ow of a saturated icesediment mixture withthermodynamic equilibrium pressure and momentum exchange Proc R Soc Lond A 4547188
Proc R Soc Lond A (2003)

Thermodynamics for open systems 2561
Again as opposed to the formulation developed by Epstein amp Maugin (2000) themass-specimacrc format is free from all the explicit extra terms caused by changes inmass and thus resembles the balance of energy known from classical mechanics
Remark 52 (balance of internal energy) A reduction to the balance ofinternal energy I = E iexcl K follows from subtracting the balance of kinetic energy(435) from the balance of total energy (59)
raquo 0 DtI = sup1pin t0 + sup1qext
0 raquo t dtI + raquo tv cent rxI = sup1pin tt + sup1qext
t (512)
6 Balance of entropy
The macrrst law of thermodynamics in the form of the balance of energy expressesthe interconvertibility of heat and work However the balance of energy itself doesnot place any restrictions on the direction of the thermodynamical process Thesecond law of thermodynamics the balance of entropy postulates the existence ofan absolute temperature and of a specimacrc entropy as a state function Through theinternal production of the latter which is required to either vanish for reversibleprocesses or be strictly positive for irreversible processes a direction is imposedon the thermodynamical process Recall that when dealing with open systems amacrxed material volume B0 is allowed to constantly gain or lose mass Open systemsnaturally exhibit an additional entropy degux and entropy source caused by the addedmass as pointed out earlier in the famous monograph by Schrodinger (1944 x 6) aswell as by Malvern (1969 x 56) or also recently by Epstein amp Maugin (2000) Theindeguence of changes in mass on the entropy is twofold On the one hand it is redegectedthrough the explicit open-system entropy degux SR and the related source terms SR0
and iexcl rXS cent R On the other hand we will introduce the reduced entropy degux andsource sup1H and sup1H0 respectively which in turn split into the extra non-mechanicalenergy terms sup1Q and sup1Q0 divided by the absolute temperature sup3 and an extra entropydegux and source S and S0 While the former parallel the introduction of the entropydegux and source in classical closed-system thermodynamics the contributions S andS0 account for the diregerence in entropy of the added mass and the original substrate
Remark 61 (balance of entropy versus entropy inequality) In the relatedliterature the entropy is often introduced through the entropy inequality For thesake of analogy we will treat the entropy as a balance quantity in the followingIts evolution is thus balanced with the sum of the external and internal entropyproduction whereby the latter is constrained to be non-negative throughout In thecase of closed-system thermodynamics this approach has been followed for exampleby Truesdell amp Toupin (1960 xx 256 and 257) Haupt (2000 x 33) or Liu (2002 x 5)
(a) Volume-specimacrc version
The balance of entropy balances the volume-specimacrc entropy density S0 = raquo 0S withthe external entropy input hext
0 and the internal entropy production hin t0 Thereby
the former consists of the entropy degux H across the material surface B0 and theentropy source H0 in the material domain B0 (cf macrgure 5)
hext0 = Div( iexcl H ) + H0 (61)
Proc R Soc Lond A (2003)
2562 E Kuhl and P Steinmann
rsquo
F J DtF
B0 Bt
S0
H S
H0 S0
St
h s
Ht St
Figure 5 Balance of entropy entropy densities deg uxes and sources
The external entropy degux H is introduced as the sum of the reduced external entropydegux sup1H enhanced by the explicit open-system contribution SR Accordingly theexternal entropy source H0 consists of the reduced entropy source sup1H0 modimacred byadditional terms SR0 and iexcl rXS cent R accounting for the explicit open-system con-tribution to the entropy supply
hext0 = Div( iexcl sup1H + SR) + sup1H0 + SR0 iexcl rXS cent R
hin t0 gt 0
)(62)
Just like in classical thermodynamics of closed systems the internal entropy produc-tion hin t
0 is required to be point-wise non-negative The balance of entropy can thusbe expressed in the following form
DtS0 = hext0 + hin t
0 dtSt + div(Stv) = hextt + hin t
t (63)
Again the material and the spatial version are related through the correspond-ing Piola transforms S0 = JSt
hext0 = Jhext
t hin t0 = Jhin t
t H = Jh cent F iexclt andsup1H = J sup1h cent F iexclt in combination with Reynoldsrsquos transport theorem Note that alter-
natively the balance of entropy which is primarily nothing but a formal demacrnitionof the entropy production can be recast into the inequality DtS0 iexcl hext
0 gt 0 Thiscondition which is typically referred to as `postulate of irreversibilityrsquo in classicalthermodynamics (see Truesdell amp Toupin 1960 x 258) induces a direction to thethermodynamic process Next we will introduce Neumann boundary conditions forthe spatial-motion Kirchhoreg and Cauchy type entropy degux H and h in terms of theclassical closed-system entropy degux contribution hclos ed
0 or hclos edt and the additional
open-system contribution hop en0 or hop en
t
H cent N = hclos ed0 + hop en
0 hop en0 = sup1hop en
0 iexcl SR cent N
h cent n = hclos edt + hop en
t hop ent = sup1hop en
t iexcl Sr cent n
)
(64)
Accordingly the entropy sources H0 and Ht are introduced as the sum of the classicalentropy source of the closed system Hclos ed
0 or Hclos edt and the additional entropy
source accounting for the nature of the open system Hop en0 or Hop en
t
H0 = Hclos ed0 + Hop en
0 Hop en0 = sup1Hop en
0 + SR0 iexcl rXS cent R
Ht = Hclos edt + Hop en
t Hop ent = sup1Hop en
t + SRt iexcl rxS cent r
)
(65)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2563
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the above equations states that the rate of changeof the mass-specimacrc entropy S = S0=raquo 0 is in equilibrium with the mass-specimacrcexternal entropy input sup1hext
0 and the mass-specimacrc internal entropy production sup1hin t0
which are introduced in the following way
sup1hext0 = hext
0 iexcl SDt raquo 0 = iexcl Div sup1H + sup1H0
sup1hin t0 = hin t
0 gt 0
)
(66)
The resulting material and spatial version of the balance of entropy
raquo 0 DtS = sup1hext0 + sup1hin t
0 raquo t dtS + raquo tv cent rxS = sup1hextt + sup1hin t
t (67)
which can be derived by subtracting S times the balance of mass (35) from thevolume-specimacrc balance of entropy (63) are related via the appropriate Piola trans-forms sup1hext
0 = Jsup1hextt and sup1hin t
0 = Jsup1hin tt and the Euler theorem (24) Moreover we can
relate the reduced entropy deguxes sup1H and sup1h demacrned through sup1H = H iexcl SR andsup1h = h iexcl Sr to the classical entropy degux of the closed system hclos ed
0 or hclos edt and
the entropy degux caused by additional eregects of the open system sup1hop en0 or sup1hop en
t
sup1H cent N = hclos ed0 + sup1hop en
0
sup1h cent n = hclos edt + sup1hop en
t
)(68)
Accordingly the reduced entropy sources sup1H0 = H0 iexcl SR0 + rXS cent R and sup1Ht = Ht iexclSRt + rxS cent r are given as the sum of the classical closed-system entropy sourceHclos ed
0 or Hclos edt and the additional open-system contribution to the entropy source
sup1Hop en0 or sup1Hop en
t sup1H0 = Hclos ed
0 + sup1Hop en0
sup1Ht = Hclos edt + sup1Hop en
t
)
(69)
Remark 62 (dissipation inequality) For further elaboration it proves con-venient to set up relations between the reduced entropy degux sup1H and the reducednon-mechanical energy degux sup1Q and between the reduced entropy source sup1H0 and thereduced non-mechanical energy source sup1Q0 in terms of the absolute temperature sup3 an extra entropy degux S and an extra entropy source S0
sup1H =1sup3
sup1Q + S sup1H0 =1sup3
sup1Q0 + S0 (610)
The above equations can be understood as a generalization of the ideas of Cowinamp Hegedus (1976) who have suggested including the additional entropy source S0
accounting for changes in entropy caused by changes in mass that are not consideredimplicitly through the changes in energy sup1Q0 Both the additional entropy degux S andthe entropy source S0 which we shall summarize in the term s
0 = iexcl Div S + S0 inthe following have to be determined constitutively These additional terms can beunderstood as an explicit representation of the exchange of entropy with the `outsideworldrsquo We now turn to the evaluation of the above-stated second law of thermo-dynamics by recasting it into an appropriate form of the dissipation inequality astatement that places further restrictions on the form of the constitutive response
Proc R Soc Lond A (2003)
2564 E Kuhl and P Steinmann
functions For this purpose we shall interpret the internal entropy production sup1hin t0 as
a measure for the degree of irreversibility introducing the dissipation rate sup1d0 as the
internal entropy production weighted by the absolute temperature as sup1d0 = sup3 sup1hin t
0 gt 0With the help of the balance of entropy (67)1 the relations (610) and the bal-ance of internal energy (512)1 the dissipation rate can be reformulated to yield theClausiusDuhem inequality in an internal energy based fashion
sup1d0 = sup1pin t
0 iexcl raquo 0Dt[I iexcl sup3 S ] iexcl raquo 0S Dt sup3 iexcl s0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (611)
By making use of the appropriate LegendreFenchel transform introducing theHelmholtz free energy ordf = I iexcl sup3 S we end up with the classical free-energy-basedversion of the ClausiusDuhem inequality
sup1d0 = sup1brvbar t DtF iexcl raquo 0 Dt ordf iexcl raquo 0S Dt sup3 iexcl s
0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (612)
which is particularly useful when the temperature sup3 rather than the entropy S isused as the independent variable In classical thermodynamics the ClausiusDuheminequality (612) is typically decomposed into a local and a conductive contributionsup1d loc
0 and sup1dcon0
sup1d loc0 = sup1brvbar t DtF iexcl raquo 0Dt ordf iexcl raquo 0SDt sup3 iexcl s
0 sup3 gt 0 sup1d con0 = iexcl sup1Q cent rX ln sup3 gt 0 (613)
whereby the local term sup1d loc0 gt 0 represents the ClausiusPlanck inequality for open
systems while the remaining conductive term sup1dcon0 gt 0 is typically referred to as a
Fourier inequality As a suplusmncient condition for sup1d0 gt 0 both inequalities are required
to hold separately In what follows we shall apply the dissipation inequality (613) toderive constitutive equations for the reduced momentum degux sup1brvbar t and the entropy SIn addition the evaluation of the dissipation inequality places further restrictions onthe extra entropy exchange s
0 The underlying procedure will be highlighted in detailfor the simple model problem of thermo-hyperelasticity in the following section
Remark 63 Note that at this stage the introduction of the reduced entropydegux and source sup1H = sup1Q=sup3 + S and sup1H0 = sup1Q0=sup3 + S0 as introduced in equations(610) is a mere constitutive assumption Nevertheless for particular constitutive-model problems the postulated relations can be verimacred through the evaluation ofthe dissipation inequality according to Muller (1973) and Liu (1972) (see also Liu2002) It will turn out that in most cases equations (610) are justimacred with thetrivial solution S = 0 and S0 = 0 However assuming this result from the veryoutset might be too restrictive for complex constitutive models as also pointed outby Epstein amp Maugin (2000)
7 Thermo-hyperelasticity
We are now in a position to exploit the second law of thermodynamics in the formof the ClausiusDuhem inequality along the lines of Coleman amp Noll (1963) Thestraightforward evaluation of the local part of the dissipation inequality in the formof the ClausiusPlanck inequality (613)1 will result in the demacrnition of the reducedmomentum degux sup1brvbar and the mass-specimacrc entropy density S Its conductive sup-plement (613)2 the Fourier inequality suggests the demacrnition of the reduced non-mechanical energy degux sup1Q along the lines of the classical linear heat conduction intro-duced by Fourier in 1822 Finally the mass degux R will be introduced constitutively
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2565
in the context of classical linear mass diregusion according to Fickrsquos law Here wewill thus restrict ourselves to a thermo-hyperelastic-model problem for which all thedissipation is caused exclusively by heat conduction and possibly by an additionalopen-system contribution of the `outside worldrsquo In what follows we shall make useof the multiplicative decomposition of the free energy ordf 0
ordf 0 = raquo 0 ordf (71)
Thereby the mass-specimacrc free-energy density ordf is expressed in terms of the materialdensity raquo 0 the deformation gradient F and the absolute temperature sup3 with a pos-sible explicit dependence on the material placement X Within the thermodynamicsof open systems the material density raquo 0 is allowed to vary in space and time is thusintroduced as function of the material placement X and the time t
ordf = ordf ( raquo 0 F sup3 X) raquo 0 = raquo 0(X t) (72)
Consequently the material time derivative of the free-energy density is formally givenin the form
Dt ordf = D raquo 0ordf Dt raquo 0 + DF ordf DtF + D sup3 ordf Dt sup3 (73)
The evaluation of the ClausiusPlanck inequality (613)1
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 + [ sup1brvbar t iexcl raquo 0DF ordf ] DtF iexcl [ raquo 0S + raquo 0 D sup3 ordf ] Dt sup3 iexcl s0 sup3 gt 0 (74)
demacrnes the reduced macrrst PiolaKirchhoreg stress tensor sup1brvbar t and the mass-specimacrcentropy S as thermodynamically conjugate variables to the deformation gradientF and the absolute temperature sup3
sup1brvbar t = raquo 0 DF ordf S = iexcl D sup3 ordf (75)
As in Cowin amp Hegedus (1976) we are left with a reduced inequality of the form
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 iexcl s0 sup3 gt 0 (76)
In biomechanics the simplest choice for the free-energy function ordf for cellular mate-rials such as open-pored biological tissues is based on the classical isotropic Neo-Hookean-type free-energy function weighted by the actual relative density [ raquo 0=raquo curren
0]n
(see for example Carter amp Hayes 1977 Gibson amp Ashby 1997)
ordf =middot
raquo 0
raquo curren0
cedil[niexcl1] 1raquo curren
0
[12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]] (77)
Here para and middot denote the classical Lamparae constants and n is an additional exponentusually allowed to vary between 1 6 n 6 35 A selection of more advanced free-energy functions for orthotropic biological tissues can be found for example in therecent collection of publications by Cowin amp Humphrey (2001) The derivatives of thefree energy ordf with respect to the material density raquo 0 and the deformation gradientF take the format
D raquo 0ordf = [n iexcl 1]
middotraquo 0
raquo curren0
cedil[niexcl2]middot 1raquo curren
0
cedil2
[ 12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]]
DF ordf =middot
raquo 0
raquo curren0
cedil[niexcl1]middot 1raquo curren
0
cedil[ middot F + [ para ln J iexcl middot ]F iexclt]
9gtgtgtgt=
gtgtgtgt
(78)
Proc R Soc Lond A (2003)
2566 E Kuhl and P Steinmann
whereby the macrrst derivative can alternatively be expressed as D raquo 0ordf = [n iexcl 1] ordf =raquo 0
According to equation (75) the reduced macrrst PiolaKirchhoreg stress tensor
sup1brvbar t =middot
raquo 0
raquo curren0
cediln
[ middot F + [ para ln J iexcl middot ]F iexclt] (79)
can be understood as the classical Neo-Hookean stress tensor weighted by the actualrelative density [ raquo 0=raquo curren
0]n The reduced dissipation inequality
iexcl [n iexcl 1] ordf [Div R + R0] + sup3 [Div S iexcl S0] gt 0 (710)
places implicit restrictions on the dissipation generated by the density evolution Dt raquo 0
through the mass degux R and the mass source R0 This amount of dissipation hasat least to be compensated by an appropriate constitutive assumption for the extraexternal entropy input s
0 through the extra entropy degux S and the extra entropysource S0 eg
S = [n iexcl 1] ordf1sup3
R S0 = iexcl [n iexcl 1] ordf1sup3
R0 (711)
Similar to the context of chemomechanics the degux r or R is usually related to thespatial or material gradient of the density rx raquo 0 or rX raquo 0 as
r = R0b cent rx raquo 0 R = rtB cent rX raquo 0 (712)
in analogy to Fickrsquos law for concentrations Here R0 and rt denote the mass-conduction coeplusmncient introducing either a materially or a spatially isotropicresponse In the context of biomechanics we typically macrnd variations of the con-stitutive equation
R0 =middot
raquo 0
raquo curren0
cediliexclm
ordf 0 iexcl ordf curren0 (713)
for the mass source R0 where raquo curren0 and ordf curren
0 denote the reference density and the refer-ence free energy respectively while m is an additional exponent that is commonlychosen to m gt n (see Harrigan amp Hamilton 1993) Finally the evaluation of theFourier inequality (613)2 as sup1d con
0 = iexcl sup1Q cent rX ln sup3 gt 0 suggests the demacrnition of themass-specimacrc non-mechanical energy degux sup1q or sup1Q according to Fourierrsquos law as
sup1q = iexcl K0b cent rx sup3 sup1Q = iexcl ktB cent rX sup3 (714)
with K0 and kt denoting the materially or spatially isotropic conductivity In order toa priori guarantee the satisfaction of the Fourier inequality (613)2 the conductivityis required to be non-negative K0 gt 0 and kt gt 0
8 Conclusion
We have presented a general framework for the thermodynamics of open systemsThe derived macreld equations are believed to be particularly useful in biomechanicalor chemomechanical applications where attention is conmacrned to one individual sub-system of the overall matter present Due to the fact that this open subsystem isallowed to constantly gain or lose mass the balance of mass had to be enhancedby additional surface and volume terms redegecting the interaction with the `outsideworldrsquo Since the newly created mass carries a particular amount of momentum
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2567
energy and entropy all the other balance equations had to be reformulated as wellTo clarify the indeguence of the changes in mass we have introduced the notions of`volume-specimacrcrsquo and `mass-specimacrcrsquo formats The former accounts for the total indegu-ence of the changes in mass through explicit mass-dependent and additional implicitopen-system contributions The latter however is free from all the mass-dependentextra terms and thus takes the familiar structure known from classical continuumthermodynamics The mass-specimacrc format is believed to be particularly useful sinceit parallels the framework of the closed-system case Consequently permissible con-stitutive relations can be derived from the mass-specimacrc version of the dissipationinequality The underlying procedure has been illustrated for the model problem ofthermo-hyperelasticity
References
Bowen R M 1976 Theory of mixtures In Continuum physics vol III Mixtures and EM macreldtheories (ed A C Eringen) pp 1127 Academic
Carter D R amp Hayes W C 1977 The behavior of bone as a two-phase porous structure JBone Joint Surg Am 59 785794
Coleman B D amp Noll W 1963 The thermodynamics of elastic materials with heat conductionand viscosity Arch Ration Mech Analysis 13 167178
Cowin S C amp Hegedus D H 1976 Bone remodelling I Theory of adaptive elasticity JElastic 6 313326
Cowin S C amp Humphrey J D 2001 Cardiovascular soft tissue mechanics Dordrecht Kluwer
de Boer R 2000 Theory of porous media Springer
Diebels S 2000 Mikropolare Zweiphasenmodelle Formulierung auf der Basis der TheoriePoroser Medien Habilitationsschrift Bericht aus dem Institut fur Mechanik (Bauwesen)Nr II-4 Universitat Stuttgart
Ehlers W 2002 Foundations of multiphasic and porous materials In Porous media theoryexperiments and numerical applications (ed W Ehlers amp J Bluhm) pp 386 Springer
Epstein M amp Maugin G A 2000 Thermomechanics of volumetric growth in uniform bodiesInt J Plasticity 16 951978
Gibson L J amp Ashby M F 1997 The mechanics of three-dimensional cellular materials ProcR Soc Lond A 382 4359
Goldstein H 1950 Classical mechanics Addison-Wesley
Harrigan T P amp Hamilton J J 1993 Finite element simulation of adaptive bone remodellinga stability criterion and a time-stepping method Int J Numer Meth Engng 36 837854
Haupt P 2000 Continuum mechanics and theory of materials Springer
Humphrey J D 2002 Cardiovasular solid mechanics Springer
Humphrey J D amp Rajagopal K R 2002 A constrained mixture model for growth and remod-eling of soft tissues Math Models Meth Appl Sci 12 407430
Liu I S 1972 Method of Lagrange multipliers for exploitation of the entropy principle ArchRation Mech Analysis 46 131148
Liu I S 2002 Continuum mechanics Springer
Malvern L E 1969 Introduction to the mechanics of a continuous medium Englewood Clireg sNJ Prentice Hall
Maugin G A 1993 Material inhomogenities in elasticity London Chapman amp Hall
Maugin G A 1999 The thermomechanics of nonlinear irreversible behaviors World Scientimacrc
Muller I 1973 Thermodynamik die Grundlagen der Materialtheorie Dusseldorf BertelsmannUniversitatsverlag
Proc R Soc Lond A (2003)
2568 E Kuhl and P Steinmann
Muller I 1994 Grundzuge der Thermodynamik Springer
Runesson K 1978 On nonlinear consolidation of soft clay PhD thesis Department of StructuralMechanics Chalmers University of Technology Goteborg Sweden
Schrodinger E 1944 What is life Cambridge University Press
Taber L A 1995 Biomechanics of growth remodeling and morphogenesis Appl Mech Rev48 487545
Truesdell C amp Toupin R 1960 The classical macreld theories In Handbuch der Physik (edS Flugge) vol 3 Springer
Wu T Hutter K amp Svendsen B 1998 On shear deg ow of a saturated icesediment mixture withthermodynamic equilibrium pressure and momentum exchange Proc R Soc Lond A 4547188
Proc R Soc Lond A (2003)

2562 E Kuhl and P Steinmann
rsquo
F J DtF
B0 Bt
S0
H S
H0 S0
St
h s
Ht St
Figure 5 Balance of entropy entropy densities deg uxes and sources
The external entropy degux H is introduced as the sum of the reduced external entropydegux sup1H enhanced by the explicit open-system contribution SR Accordingly theexternal entropy source H0 consists of the reduced entropy source sup1H0 modimacred byadditional terms SR0 and iexcl rXS cent R accounting for the explicit open-system con-tribution to the entropy supply
hext0 = Div( iexcl sup1H + SR) + sup1H0 + SR0 iexcl rXS cent R
hin t0 gt 0
)(62)
Just like in classical thermodynamics of closed systems the internal entropy produc-tion hin t
0 is required to be point-wise non-negative The balance of entropy can thusbe expressed in the following form
DtS0 = hext0 + hin t
0 dtSt + div(Stv) = hextt + hin t
t (63)
Again the material and the spatial version are related through the correspond-ing Piola transforms S0 = JSt
hext0 = Jhext
t hin t0 = Jhin t
t H = Jh cent F iexclt andsup1H = J sup1h cent F iexclt in combination with Reynoldsrsquos transport theorem Note that alter-
natively the balance of entropy which is primarily nothing but a formal demacrnitionof the entropy production can be recast into the inequality DtS0 iexcl hext
0 gt 0 Thiscondition which is typically referred to as `postulate of irreversibilityrsquo in classicalthermodynamics (see Truesdell amp Toupin 1960 x 258) induces a direction to thethermodynamic process Next we will introduce Neumann boundary conditions forthe spatial-motion Kirchhoreg and Cauchy type entropy degux H and h in terms of theclassical closed-system entropy degux contribution hclos ed
0 or hclos edt and the additional
open-system contribution hop en0 or hop en
t
H cent N = hclos ed0 + hop en
0 hop en0 = sup1hop en
0 iexcl SR cent N
h cent n = hclos edt + hop en
t hop ent = sup1hop en
t iexcl Sr cent n
)
(64)
Accordingly the entropy sources H0 and Ht are introduced as the sum of the classicalentropy source of the closed system Hclos ed
0 or Hclos edt and the additional entropy
source accounting for the nature of the open system Hop en0 or Hop en
t
H0 = Hclos ed0 + Hop en
0 Hop en0 = sup1Hop en
0 + SR0 iexcl rXS cent R
Ht = Hclos edt + Hop en
t Hop ent = sup1Hop en
t + SRt iexcl rxS cent r
)
(65)
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2563
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the above equations states that the rate of changeof the mass-specimacrc entropy S = S0=raquo 0 is in equilibrium with the mass-specimacrcexternal entropy input sup1hext
0 and the mass-specimacrc internal entropy production sup1hin t0
which are introduced in the following way
sup1hext0 = hext
0 iexcl SDt raquo 0 = iexcl Div sup1H + sup1H0
sup1hin t0 = hin t
0 gt 0
)
(66)
The resulting material and spatial version of the balance of entropy
raquo 0 DtS = sup1hext0 + sup1hin t
0 raquo t dtS + raquo tv cent rxS = sup1hextt + sup1hin t
t (67)
which can be derived by subtracting S times the balance of mass (35) from thevolume-specimacrc balance of entropy (63) are related via the appropriate Piola trans-forms sup1hext
0 = Jsup1hextt and sup1hin t
0 = Jsup1hin tt and the Euler theorem (24) Moreover we can
relate the reduced entropy deguxes sup1H and sup1h demacrned through sup1H = H iexcl SR andsup1h = h iexcl Sr to the classical entropy degux of the closed system hclos ed
0 or hclos edt and
the entropy degux caused by additional eregects of the open system sup1hop en0 or sup1hop en
t
sup1H cent N = hclos ed0 + sup1hop en
0
sup1h cent n = hclos edt + sup1hop en
t
)(68)
Accordingly the reduced entropy sources sup1H0 = H0 iexcl SR0 + rXS cent R and sup1Ht = Ht iexclSRt + rxS cent r are given as the sum of the classical closed-system entropy sourceHclos ed
0 or Hclos edt and the additional open-system contribution to the entropy source
sup1Hop en0 or sup1Hop en
t sup1H0 = Hclos ed
0 + sup1Hop en0
sup1Ht = Hclos edt + sup1Hop en
t
)
(69)
Remark 62 (dissipation inequality) For further elaboration it proves con-venient to set up relations between the reduced entropy degux sup1H and the reducednon-mechanical energy degux sup1Q and between the reduced entropy source sup1H0 and thereduced non-mechanical energy source sup1Q0 in terms of the absolute temperature sup3 an extra entropy degux S and an extra entropy source S0
sup1H =1sup3
sup1Q + S sup1H0 =1sup3
sup1Q0 + S0 (610)
The above equations can be understood as a generalization of the ideas of Cowinamp Hegedus (1976) who have suggested including the additional entropy source S0
accounting for changes in entropy caused by changes in mass that are not consideredimplicitly through the changes in energy sup1Q0 Both the additional entropy degux S andthe entropy source S0 which we shall summarize in the term s
0 = iexcl Div S + S0 inthe following have to be determined constitutively These additional terms can beunderstood as an explicit representation of the exchange of entropy with the `outsideworldrsquo We now turn to the evaluation of the above-stated second law of thermo-dynamics by recasting it into an appropriate form of the dissipation inequality astatement that places further restrictions on the form of the constitutive response
Proc R Soc Lond A (2003)
2564 E Kuhl and P Steinmann
functions For this purpose we shall interpret the internal entropy production sup1hin t0 as
a measure for the degree of irreversibility introducing the dissipation rate sup1d0 as the
internal entropy production weighted by the absolute temperature as sup1d0 = sup3 sup1hin t
0 gt 0With the help of the balance of entropy (67)1 the relations (610) and the bal-ance of internal energy (512)1 the dissipation rate can be reformulated to yield theClausiusDuhem inequality in an internal energy based fashion
sup1d0 = sup1pin t
0 iexcl raquo 0Dt[I iexcl sup3 S ] iexcl raquo 0S Dt sup3 iexcl s0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (611)
By making use of the appropriate LegendreFenchel transform introducing theHelmholtz free energy ordf = I iexcl sup3 S we end up with the classical free-energy-basedversion of the ClausiusDuhem inequality
sup1d0 = sup1brvbar t DtF iexcl raquo 0 Dt ordf iexcl raquo 0S Dt sup3 iexcl s
0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (612)
which is particularly useful when the temperature sup3 rather than the entropy S isused as the independent variable In classical thermodynamics the ClausiusDuheminequality (612) is typically decomposed into a local and a conductive contributionsup1d loc
0 and sup1dcon0
sup1d loc0 = sup1brvbar t DtF iexcl raquo 0Dt ordf iexcl raquo 0SDt sup3 iexcl s
0 sup3 gt 0 sup1d con0 = iexcl sup1Q cent rX ln sup3 gt 0 (613)
whereby the local term sup1d loc0 gt 0 represents the ClausiusPlanck inequality for open
systems while the remaining conductive term sup1dcon0 gt 0 is typically referred to as a
Fourier inequality As a suplusmncient condition for sup1d0 gt 0 both inequalities are required
to hold separately In what follows we shall apply the dissipation inequality (613) toderive constitutive equations for the reduced momentum degux sup1brvbar t and the entropy SIn addition the evaluation of the dissipation inequality places further restrictions onthe extra entropy exchange s
0 The underlying procedure will be highlighted in detailfor the simple model problem of thermo-hyperelasticity in the following section
Remark 63 Note that at this stage the introduction of the reduced entropydegux and source sup1H = sup1Q=sup3 + S and sup1H0 = sup1Q0=sup3 + S0 as introduced in equations(610) is a mere constitutive assumption Nevertheless for particular constitutive-model problems the postulated relations can be verimacred through the evaluation ofthe dissipation inequality according to Muller (1973) and Liu (1972) (see also Liu2002) It will turn out that in most cases equations (610) are justimacred with thetrivial solution S = 0 and S0 = 0 However assuming this result from the veryoutset might be too restrictive for complex constitutive models as also pointed outby Epstein amp Maugin (2000)
7 Thermo-hyperelasticity
We are now in a position to exploit the second law of thermodynamics in the formof the ClausiusDuhem inequality along the lines of Coleman amp Noll (1963) Thestraightforward evaluation of the local part of the dissipation inequality in the formof the ClausiusPlanck inequality (613)1 will result in the demacrnition of the reducedmomentum degux sup1brvbar and the mass-specimacrc entropy density S Its conductive sup-plement (613)2 the Fourier inequality suggests the demacrnition of the reduced non-mechanical energy degux sup1Q along the lines of the classical linear heat conduction intro-duced by Fourier in 1822 Finally the mass degux R will be introduced constitutively
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2565
in the context of classical linear mass diregusion according to Fickrsquos law Here wewill thus restrict ourselves to a thermo-hyperelastic-model problem for which all thedissipation is caused exclusively by heat conduction and possibly by an additionalopen-system contribution of the `outside worldrsquo In what follows we shall make useof the multiplicative decomposition of the free energy ordf 0
ordf 0 = raquo 0 ordf (71)
Thereby the mass-specimacrc free-energy density ordf is expressed in terms of the materialdensity raquo 0 the deformation gradient F and the absolute temperature sup3 with a pos-sible explicit dependence on the material placement X Within the thermodynamicsof open systems the material density raquo 0 is allowed to vary in space and time is thusintroduced as function of the material placement X and the time t
ordf = ordf ( raquo 0 F sup3 X) raquo 0 = raquo 0(X t) (72)
Consequently the material time derivative of the free-energy density is formally givenin the form
Dt ordf = D raquo 0ordf Dt raquo 0 + DF ordf DtF + D sup3 ordf Dt sup3 (73)
The evaluation of the ClausiusPlanck inequality (613)1
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 + [ sup1brvbar t iexcl raquo 0DF ordf ] DtF iexcl [ raquo 0S + raquo 0 D sup3 ordf ] Dt sup3 iexcl s0 sup3 gt 0 (74)
demacrnes the reduced macrrst PiolaKirchhoreg stress tensor sup1brvbar t and the mass-specimacrcentropy S as thermodynamically conjugate variables to the deformation gradientF and the absolute temperature sup3
sup1brvbar t = raquo 0 DF ordf S = iexcl D sup3 ordf (75)
As in Cowin amp Hegedus (1976) we are left with a reduced inequality of the form
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 iexcl s0 sup3 gt 0 (76)
In biomechanics the simplest choice for the free-energy function ordf for cellular mate-rials such as open-pored biological tissues is based on the classical isotropic Neo-Hookean-type free-energy function weighted by the actual relative density [ raquo 0=raquo curren
0]n
(see for example Carter amp Hayes 1977 Gibson amp Ashby 1997)
ordf =middot
raquo 0
raquo curren0
cedil[niexcl1] 1raquo curren
0
[12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]] (77)
Here para and middot denote the classical Lamparae constants and n is an additional exponentusually allowed to vary between 1 6 n 6 35 A selection of more advanced free-energy functions for orthotropic biological tissues can be found for example in therecent collection of publications by Cowin amp Humphrey (2001) The derivatives of thefree energy ordf with respect to the material density raquo 0 and the deformation gradientF take the format
D raquo 0ordf = [n iexcl 1]
middotraquo 0
raquo curren0
cedil[niexcl2]middot 1raquo curren
0
cedil2
[ 12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]]
DF ordf =middot
raquo 0
raquo curren0
cedil[niexcl1]middot 1raquo curren
0
cedil[ middot F + [ para ln J iexcl middot ]F iexclt]
9gtgtgtgt=
gtgtgtgt
(78)
Proc R Soc Lond A (2003)
2566 E Kuhl and P Steinmann
whereby the macrrst derivative can alternatively be expressed as D raquo 0ordf = [n iexcl 1] ordf =raquo 0
According to equation (75) the reduced macrrst PiolaKirchhoreg stress tensor
sup1brvbar t =middot
raquo 0
raquo curren0
cediln
[ middot F + [ para ln J iexcl middot ]F iexclt] (79)
can be understood as the classical Neo-Hookean stress tensor weighted by the actualrelative density [ raquo 0=raquo curren
0]n The reduced dissipation inequality
iexcl [n iexcl 1] ordf [Div R + R0] + sup3 [Div S iexcl S0] gt 0 (710)
places implicit restrictions on the dissipation generated by the density evolution Dt raquo 0
through the mass degux R and the mass source R0 This amount of dissipation hasat least to be compensated by an appropriate constitutive assumption for the extraexternal entropy input s
0 through the extra entropy degux S and the extra entropysource S0 eg
S = [n iexcl 1] ordf1sup3
R S0 = iexcl [n iexcl 1] ordf1sup3
R0 (711)
Similar to the context of chemomechanics the degux r or R is usually related to thespatial or material gradient of the density rx raquo 0 or rX raquo 0 as
r = R0b cent rx raquo 0 R = rtB cent rX raquo 0 (712)
in analogy to Fickrsquos law for concentrations Here R0 and rt denote the mass-conduction coeplusmncient introducing either a materially or a spatially isotropicresponse In the context of biomechanics we typically macrnd variations of the con-stitutive equation
R0 =middot
raquo 0
raquo curren0
cediliexclm
ordf 0 iexcl ordf curren0 (713)
for the mass source R0 where raquo curren0 and ordf curren
0 denote the reference density and the refer-ence free energy respectively while m is an additional exponent that is commonlychosen to m gt n (see Harrigan amp Hamilton 1993) Finally the evaluation of theFourier inequality (613)2 as sup1d con
0 = iexcl sup1Q cent rX ln sup3 gt 0 suggests the demacrnition of themass-specimacrc non-mechanical energy degux sup1q or sup1Q according to Fourierrsquos law as
sup1q = iexcl K0b cent rx sup3 sup1Q = iexcl ktB cent rX sup3 (714)
with K0 and kt denoting the materially or spatially isotropic conductivity In order toa priori guarantee the satisfaction of the Fourier inequality (613)2 the conductivityis required to be non-negative K0 gt 0 and kt gt 0
8 Conclusion
We have presented a general framework for the thermodynamics of open systemsThe derived macreld equations are believed to be particularly useful in biomechanicalor chemomechanical applications where attention is conmacrned to one individual sub-system of the overall matter present Due to the fact that this open subsystem isallowed to constantly gain or lose mass the balance of mass had to be enhancedby additional surface and volume terms redegecting the interaction with the `outsideworldrsquo Since the newly created mass carries a particular amount of momentum
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2567
energy and entropy all the other balance equations had to be reformulated as wellTo clarify the indeguence of the changes in mass we have introduced the notions of`volume-specimacrcrsquo and `mass-specimacrcrsquo formats The former accounts for the total indegu-ence of the changes in mass through explicit mass-dependent and additional implicitopen-system contributions The latter however is free from all the mass-dependentextra terms and thus takes the familiar structure known from classical continuumthermodynamics The mass-specimacrc format is believed to be particularly useful sinceit parallels the framework of the closed-system case Consequently permissible con-stitutive relations can be derived from the mass-specimacrc version of the dissipationinequality The underlying procedure has been illustrated for the model problem ofthermo-hyperelasticity
References
Bowen R M 1976 Theory of mixtures In Continuum physics vol III Mixtures and EM macreldtheories (ed A C Eringen) pp 1127 Academic
Carter D R amp Hayes W C 1977 The behavior of bone as a two-phase porous structure JBone Joint Surg Am 59 785794
Coleman B D amp Noll W 1963 The thermodynamics of elastic materials with heat conductionand viscosity Arch Ration Mech Analysis 13 167178
Cowin S C amp Hegedus D H 1976 Bone remodelling I Theory of adaptive elasticity JElastic 6 313326
Cowin S C amp Humphrey J D 2001 Cardiovascular soft tissue mechanics Dordrecht Kluwer
de Boer R 2000 Theory of porous media Springer
Diebels S 2000 Mikropolare Zweiphasenmodelle Formulierung auf der Basis der TheoriePoroser Medien Habilitationsschrift Bericht aus dem Institut fur Mechanik (Bauwesen)Nr II-4 Universitat Stuttgart
Ehlers W 2002 Foundations of multiphasic and porous materials In Porous media theoryexperiments and numerical applications (ed W Ehlers amp J Bluhm) pp 386 Springer
Epstein M amp Maugin G A 2000 Thermomechanics of volumetric growth in uniform bodiesInt J Plasticity 16 951978
Gibson L J amp Ashby M F 1997 The mechanics of three-dimensional cellular materials ProcR Soc Lond A 382 4359
Goldstein H 1950 Classical mechanics Addison-Wesley
Harrigan T P amp Hamilton J J 1993 Finite element simulation of adaptive bone remodellinga stability criterion and a time-stepping method Int J Numer Meth Engng 36 837854
Haupt P 2000 Continuum mechanics and theory of materials Springer
Humphrey J D 2002 Cardiovasular solid mechanics Springer
Humphrey J D amp Rajagopal K R 2002 A constrained mixture model for growth and remod-eling of soft tissues Math Models Meth Appl Sci 12 407430
Liu I S 1972 Method of Lagrange multipliers for exploitation of the entropy principle ArchRation Mech Analysis 46 131148
Liu I S 2002 Continuum mechanics Springer
Malvern L E 1969 Introduction to the mechanics of a continuous medium Englewood Clireg sNJ Prentice Hall
Maugin G A 1993 Material inhomogenities in elasticity London Chapman amp Hall
Maugin G A 1999 The thermomechanics of nonlinear irreversible behaviors World Scientimacrc
Muller I 1973 Thermodynamik die Grundlagen der Materialtheorie Dusseldorf BertelsmannUniversitatsverlag
Proc R Soc Lond A (2003)
2568 E Kuhl and P Steinmann
Muller I 1994 Grundzuge der Thermodynamik Springer
Runesson K 1978 On nonlinear consolidation of soft clay PhD thesis Department of StructuralMechanics Chalmers University of Technology Goteborg Sweden
Schrodinger E 1944 What is life Cambridge University Press
Taber L A 1995 Biomechanics of growth remodeling and morphogenesis Appl Mech Rev48 487545
Truesdell C amp Toupin R 1960 The classical macreld theories In Handbuch der Physik (edS Flugge) vol 3 Springer
Wu T Hutter K amp Svendsen B 1998 On shear deg ow of a saturated icesediment mixture withthermodynamic equilibrium pressure and momentum exchange Proc R Soc Lond A 4547188
Proc R Soc Lond A (2003)

Thermodynamics for open systems 2563
(b) Mass-specimacrc version
The mass-specimacrc counterpart of the above equations states that the rate of changeof the mass-specimacrc entropy S = S0=raquo 0 is in equilibrium with the mass-specimacrcexternal entropy input sup1hext
0 and the mass-specimacrc internal entropy production sup1hin t0
which are introduced in the following way
sup1hext0 = hext
0 iexcl SDt raquo 0 = iexcl Div sup1H + sup1H0
sup1hin t0 = hin t
0 gt 0
)
(66)
The resulting material and spatial version of the balance of entropy
raquo 0 DtS = sup1hext0 + sup1hin t
0 raquo t dtS + raquo tv cent rxS = sup1hextt + sup1hin t
t (67)
which can be derived by subtracting S times the balance of mass (35) from thevolume-specimacrc balance of entropy (63) are related via the appropriate Piola trans-forms sup1hext
0 = Jsup1hextt and sup1hin t
0 = Jsup1hin tt and the Euler theorem (24) Moreover we can
relate the reduced entropy deguxes sup1H and sup1h demacrned through sup1H = H iexcl SR andsup1h = h iexcl Sr to the classical entropy degux of the closed system hclos ed
0 or hclos edt and
the entropy degux caused by additional eregects of the open system sup1hop en0 or sup1hop en
t
sup1H cent N = hclos ed0 + sup1hop en
0
sup1h cent n = hclos edt + sup1hop en
t
)(68)
Accordingly the reduced entropy sources sup1H0 = H0 iexcl SR0 + rXS cent R and sup1Ht = Ht iexclSRt + rxS cent r are given as the sum of the classical closed-system entropy sourceHclos ed
0 or Hclos edt and the additional open-system contribution to the entropy source
sup1Hop en0 or sup1Hop en
t sup1H0 = Hclos ed
0 + sup1Hop en0
sup1Ht = Hclos edt + sup1Hop en
t
)
(69)
Remark 62 (dissipation inequality) For further elaboration it proves con-venient to set up relations between the reduced entropy degux sup1H and the reducednon-mechanical energy degux sup1Q and between the reduced entropy source sup1H0 and thereduced non-mechanical energy source sup1Q0 in terms of the absolute temperature sup3 an extra entropy degux S and an extra entropy source S0
sup1H =1sup3
sup1Q + S sup1H0 =1sup3
sup1Q0 + S0 (610)
The above equations can be understood as a generalization of the ideas of Cowinamp Hegedus (1976) who have suggested including the additional entropy source S0
accounting for changes in entropy caused by changes in mass that are not consideredimplicitly through the changes in energy sup1Q0 Both the additional entropy degux S andthe entropy source S0 which we shall summarize in the term s
0 = iexcl Div S + S0 inthe following have to be determined constitutively These additional terms can beunderstood as an explicit representation of the exchange of entropy with the `outsideworldrsquo We now turn to the evaluation of the above-stated second law of thermo-dynamics by recasting it into an appropriate form of the dissipation inequality astatement that places further restrictions on the form of the constitutive response
Proc R Soc Lond A (2003)
2564 E Kuhl and P Steinmann
functions For this purpose we shall interpret the internal entropy production sup1hin t0 as
a measure for the degree of irreversibility introducing the dissipation rate sup1d0 as the
internal entropy production weighted by the absolute temperature as sup1d0 = sup3 sup1hin t
0 gt 0With the help of the balance of entropy (67)1 the relations (610) and the bal-ance of internal energy (512)1 the dissipation rate can be reformulated to yield theClausiusDuhem inequality in an internal energy based fashion
sup1d0 = sup1pin t
0 iexcl raquo 0Dt[I iexcl sup3 S ] iexcl raquo 0S Dt sup3 iexcl s0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (611)
By making use of the appropriate LegendreFenchel transform introducing theHelmholtz free energy ordf = I iexcl sup3 S we end up with the classical free-energy-basedversion of the ClausiusDuhem inequality
sup1d0 = sup1brvbar t DtF iexcl raquo 0 Dt ordf iexcl raquo 0S Dt sup3 iexcl s
0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (612)
which is particularly useful when the temperature sup3 rather than the entropy S isused as the independent variable In classical thermodynamics the ClausiusDuheminequality (612) is typically decomposed into a local and a conductive contributionsup1d loc
0 and sup1dcon0
sup1d loc0 = sup1brvbar t DtF iexcl raquo 0Dt ordf iexcl raquo 0SDt sup3 iexcl s
0 sup3 gt 0 sup1d con0 = iexcl sup1Q cent rX ln sup3 gt 0 (613)
whereby the local term sup1d loc0 gt 0 represents the ClausiusPlanck inequality for open
systems while the remaining conductive term sup1dcon0 gt 0 is typically referred to as a
Fourier inequality As a suplusmncient condition for sup1d0 gt 0 both inequalities are required
to hold separately In what follows we shall apply the dissipation inequality (613) toderive constitutive equations for the reduced momentum degux sup1brvbar t and the entropy SIn addition the evaluation of the dissipation inequality places further restrictions onthe extra entropy exchange s
0 The underlying procedure will be highlighted in detailfor the simple model problem of thermo-hyperelasticity in the following section
Remark 63 Note that at this stage the introduction of the reduced entropydegux and source sup1H = sup1Q=sup3 + S and sup1H0 = sup1Q0=sup3 + S0 as introduced in equations(610) is a mere constitutive assumption Nevertheless for particular constitutive-model problems the postulated relations can be verimacred through the evaluation ofthe dissipation inequality according to Muller (1973) and Liu (1972) (see also Liu2002) It will turn out that in most cases equations (610) are justimacred with thetrivial solution S = 0 and S0 = 0 However assuming this result from the veryoutset might be too restrictive for complex constitutive models as also pointed outby Epstein amp Maugin (2000)
7 Thermo-hyperelasticity
We are now in a position to exploit the second law of thermodynamics in the formof the ClausiusDuhem inequality along the lines of Coleman amp Noll (1963) Thestraightforward evaluation of the local part of the dissipation inequality in the formof the ClausiusPlanck inequality (613)1 will result in the demacrnition of the reducedmomentum degux sup1brvbar and the mass-specimacrc entropy density S Its conductive sup-plement (613)2 the Fourier inequality suggests the demacrnition of the reduced non-mechanical energy degux sup1Q along the lines of the classical linear heat conduction intro-duced by Fourier in 1822 Finally the mass degux R will be introduced constitutively
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2565
in the context of classical linear mass diregusion according to Fickrsquos law Here wewill thus restrict ourselves to a thermo-hyperelastic-model problem for which all thedissipation is caused exclusively by heat conduction and possibly by an additionalopen-system contribution of the `outside worldrsquo In what follows we shall make useof the multiplicative decomposition of the free energy ordf 0
ordf 0 = raquo 0 ordf (71)
Thereby the mass-specimacrc free-energy density ordf is expressed in terms of the materialdensity raquo 0 the deformation gradient F and the absolute temperature sup3 with a pos-sible explicit dependence on the material placement X Within the thermodynamicsof open systems the material density raquo 0 is allowed to vary in space and time is thusintroduced as function of the material placement X and the time t
ordf = ordf ( raquo 0 F sup3 X) raquo 0 = raquo 0(X t) (72)
Consequently the material time derivative of the free-energy density is formally givenin the form
Dt ordf = D raquo 0ordf Dt raquo 0 + DF ordf DtF + D sup3 ordf Dt sup3 (73)
The evaluation of the ClausiusPlanck inequality (613)1
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 + [ sup1brvbar t iexcl raquo 0DF ordf ] DtF iexcl [ raquo 0S + raquo 0 D sup3 ordf ] Dt sup3 iexcl s0 sup3 gt 0 (74)
demacrnes the reduced macrrst PiolaKirchhoreg stress tensor sup1brvbar t and the mass-specimacrcentropy S as thermodynamically conjugate variables to the deformation gradientF and the absolute temperature sup3
sup1brvbar t = raquo 0 DF ordf S = iexcl D sup3 ordf (75)
As in Cowin amp Hegedus (1976) we are left with a reduced inequality of the form
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 iexcl s0 sup3 gt 0 (76)
In biomechanics the simplest choice for the free-energy function ordf for cellular mate-rials such as open-pored biological tissues is based on the classical isotropic Neo-Hookean-type free-energy function weighted by the actual relative density [ raquo 0=raquo curren
0]n
(see for example Carter amp Hayes 1977 Gibson amp Ashby 1997)
ordf =middot
raquo 0
raquo curren0
cedil[niexcl1] 1raquo curren
0
[12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]] (77)
Here para and middot denote the classical Lamparae constants and n is an additional exponentusually allowed to vary between 1 6 n 6 35 A selection of more advanced free-energy functions for orthotropic biological tissues can be found for example in therecent collection of publications by Cowin amp Humphrey (2001) The derivatives of thefree energy ordf with respect to the material density raquo 0 and the deformation gradientF take the format
D raquo 0ordf = [n iexcl 1]
middotraquo 0
raquo curren0
cedil[niexcl2]middot 1raquo curren
0
cedil2
[ 12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]]
DF ordf =middot
raquo 0
raquo curren0
cedil[niexcl1]middot 1raquo curren
0
cedil[ middot F + [ para ln J iexcl middot ]F iexclt]
9gtgtgtgt=
gtgtgtgt
(78)
Proc R Soc Lond A (2003)
2566 E Kuhl and P Steinmann
whereby the macrrst derivative can alternatively be expressed as D raquo 0ordf = [n iexcl 1] ordf =raquo 0
According to equation (75) the reduced macrrst PiolaKirchhoreg stress tensor
sup1brvbar t =middot
raquo 0
raquo curren0
cediln
[ middot F + [ para ln J iexcl middot ]F iexclt] (79)
can be understood as the classical Neo-Hookean stress tensor weighted by the actualrelative density [ raquo 0=raquo curren
0]n The reduced dissipation inequality
iexcl [n iexcl 1] ordf [Div R + R0] + sup3 [Div S iexcl S0] gt 0 (710)
places implicit restrictions on the dissipation generated by the density evolution Dt raquo 0
through the mass degux R and the mass source R0 This amount of dissipation hasat least to be compensated by an appropriate constitutive assumption for the extraexternal entropy input s
0 through the extra entropy degux S and the extra entropysource S0 eg
S = [n iexcl 1] ordf1sup3
R S0 = iexcl [n iexcl 1] ordf1sup3
R0 (711)
Similar to the context of chemomechanics the degux r or R is usually related to thespatial or material gradient of the density rx raquo 0 or rX raquo 0 as
r = R0b cent rx raquo 0 R = rtB cent rX raquo 0 (712)
in analogy to Fickrsquos law for concentrations Here R0 and rt denote the mass-conduction coeplusmncient introducing either a materially or a spatially isotropicresponse In the context of biomechanics we typically macrnd variations of the con-stitutive equation
R0 =middot
raquo 0
raquo curren0
cediliexclm
ordf 0 iexcl ordf curren0 (713)
for the mass source R0 where raquo curren0 and ordf curren
0 denote the reference density and the refer-ence free energy respectively while m is an additional exponent that is commonlychosen to m gt n (see Harrigan amp Hamilton 1993) Finally the evaluation of theFourier inequality (613)2 as sup1d con
0 = iexcl sup1Q cent rX ln sup3 gt 0 suggests the demacrnition of themass-specimacrc non-mechanical energy degux sup1q or sup1Q according to Fourierrsquos law as
sup1q = iexcl K0b cent rx sup3 sup1Q = iexcl ktB cent rX sup3 (714)
with K0 and kt denoting the materially or spatially isotropic conductivity In order toa priori guarantee the satisfaction of the Fourier inequality (613)2 the conductivityis required to be non-negative K0 gt 0 and kt gt 0
8 Conclusion
We have presented a general framework for the thermodynamics of open systemsThe derived macreld equations are believed to be particularly useful in biomechanicalor chemomechanical applications where attention is conmacrned to one individual sub-system of the overall matter present Due to the fact that this open subsystem isallowed to constantly gain or lose mass the balance of mass had to be enhancedby additional surface and volume terms redegecting the interaction with the `outsideworldrsquo Since the newly created mass carries a particular amount of momentum
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2567
energy and entropy all the other balance equations had to be reformulated as wellTo clarify the indeguence of the changes in mass we have introduced the notions of`volume-specimacrcrsquo and `mass-specimacrcrsquo formats The former accounts for the total indegu-ence of the changes in mass through explicit mass-dependent and additional implicitopen-system contributions The latter however is free from all the mass-dependentextra terms and thus takes the familiar structure known from classical continuumthermodynamics The mass-specimacrc format is believed to be particularly useful sinceit parallels the framework of the closed-system case Consequently permissible con-stitutive relations can be derived from the mass-specimacrc version of the dissipationinequality The underlying procedure has been illustrated for the model problem ofthermo-hyperelasticity
References
Bowen R M 1976 Theory of mixtures In Continuum physics vol III Mixtures and EM macreldtheories (ed A C Eringen) pp 1127 Academic
Carter D R amp Hayes W C 1977 The behavior of bone as a two-phase porous structure JBone Joint Surg Am 59 785794
Coleman B D amp Noll W 1963 The thermodynamics of elastic materials with heat conductionand viscosity Arch Ration Mech Analysis 13 167178
Cowin S C amp Hegedus D H 1976 Bone remodelling I Theory of adaptive elasticity JElastic 6 313326
Cowin S C amp Humphrey J D 2001 Cardiovascular soft tissue mechanics Dordrecht Kluwer
de Boer R 2000 Theory of porous media Springer
Diebels S 2000 Mikropolare Zweiphasenmodelle Formulierung auf der Basis der TheoriePoroser Medien Habilitationsschrift Bericht aus dem Institut fur Mechanik (Bauwesen)Nr II-4 Universitat Stuttgart
Ehlers W 2002 Foundations of multiphasic and porous materials In Porous media theoryexperiments and numerical applications (ed W Ehlers amp J Bluhm) pp 386 Springer
Epstein M amp Maugin G A 2000 Thermomechanics of volumetric growth in uniform bodiesInt J Plasticity 16 951978
Gibson L J amp Ashby M F 1997 The mechanics of three-dimensional cellular materials ProcR Soc Lond A 382 4359
Goldstein H 1950 Classical mechanics Addison-Wesley
Harrigan T P amp Hamilton J J 1993 Finite element simulation of adaptive bone remodellinga stability criterion and a time-stepping method Int J Numer Meth Engng 36 837854
Haupt P 2000 Continuum mechanics and theory of materials Springer
Humphrey J D 2002 Cardiovasular solid mechanics Springer
Humphrey J D amp Rajagopal K R 2002 A constrained mixture model for growth and remod-eling of soft tissues Math Models Meth Appl Sci 12 407430
Liu I S 1972 Method of Lagrange multipliers for exploitation of the entropy principle ArchRation Mech Analysis 46 131148
Liu I S 2002 Continuum mechanics Springer
Malvern L E 1969 Introduction to the mechanics of a continuous medium Englewood Clireg sNJ Prentice Hall
Maugin G A 1993 Material inhomogenities in elasticity London Chapman amp Hall
Maugin G A 1999 The thermomechanics of nonlinear irreversible behaviors World Scientimacrc
Muller I 1973 Thermodynamik die Grundlagen der Materialtheorie Dusseldorf BertelsmannUniversitatsverlag
Proc R Soc Lond A (2003)
2568 E Kuhl and P Steinmann
Muller I 1994 Grundzuge der Thermodynamik Springer
Runesson K 1978 On nonlinear consolidation of soft clay PhD thesis Department of StructuralMechanics Chalmers University of Technology Goteborg Sweden
Schrodinger E 1944 What is life Cambridge University Press
Taber L A 1995 Biomechanics of growth remodeling and morphogenesis Appl Mech Rev48 487545
Truesdell C amp Toupin R 1960 The classical macreld theories In Handbuch der Physik (edS Flugge) vol 3 Springer
Wu T Hutter K amp Svendsen B 1998 On shear deg ow of a saturated icesediment mixture withthermodynamic equilibrium pressure and momentum exchange Proc R Soc Lond A 4547188
Proc R Soc Lond A (2003)

2564 E Kuhl and P Steinmann
functions For this purpose we shall interpret the internal entropy production sup1hin t0 as
a measure for the degree of irreversibility introducing the dissipation rate sup1d0 as the
internal entropy production weighted by the absolute temperature as sup1d0 = sup3 sup1hin t
0 gt 0With the help of the balance of entropy (67)1 the relations (610) and the bal-ance of internal energy (512)1 the dissipation rate can be reformulated to yield theClausiusDuhem inequality in an internal energy based fashion
sup1d0 = sup1pin t
0 iexcl raquo 0Dt[I iexcl sup3 S ] iexcl raquo 0S Dt sup3 iexcl s0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (611)
By making use of the appropriate LegendreFenchel transform introducing theHelmholtz free energy ordf = I iexcl sup3 S we end up with the classical free-energy-basedversion of the ClausiusDuhem inequality
sup1d0 = sup1brvbar t DtF iexcl raquo 0 Dt ordf iexcl raquo 0S Dt sup3 iexcl s
0 sup3 iexcl sup1Q cent rX ln sup3 gt 0 (612)
which is particularly useful when the temperature sup3 rather than the entropy S isused as the independent variable In classical thermodynamics the ClausiusDuheminequality (612) is typically decomposed into a local and a conductive contributionsup1d loc
0 and sup1dcon0
sup1d loc0 = sup1brvbar t DtF iexcl raquo 0Dt ordf iexcl raquo 0SDt sup3 iexcl s
0 sup3 gt 0 sup1d con0 = iexcl sup1Q cent rX ln sup3 gt 0 (613)
whereby the local term sup1d loc0 gt 0 represents the ClausiusPlanck inequality for open
systems while the remaining conductive term sup1dcon0 gt 0 is typically referred to as a
Fourier inequality As a suplusmncient condition for sup1d0 gt 0 both inequalities are required
to hold separately In what follows we shall apply the dissipation inequality (613) toderive constitutive equations for the reduced momentum degux sup1brvbar t and the entropy SIn addition the evaluation of the dissipation inequality places further restrictions onthe extra entropy exchange s
0 The underlying procedure will be highlighted in detailfor the simple model problem of thermo-hyperelasticity in the following section
Remark 63 Note that at this stage the introduction of the reduced entropydegux and source sup1H = sup1Q=sup3 + S and sup1H0 = sup1Q0=sup3 + S0 as introduced in equations(610) is a mere constitutive assumption Nevertheless for particular constitutive-model problems the postulated relations can be verimacred through the evaluation ofthe dissipation inequality according to Muller (1973) and Liu (1972) (see also Liu2002) It will turn out that in most cases equations (610) are justimacred with thetrivial solution S = 0 and S0 = 0 However assuming this result from the veryoutset might be too restrictive for complex constitutive models as also pointed outby Epstein amp Maugin (2000)
7 Thermo-hyperelasticity
We are now in a position to exploit the second law of thermodynamics in the formof the ClausiusDuhem inequality along the lines of Coleman amp Noll (1963) Thestraightforward evaluation of the local part of the dissipation inequality in the formof the ClausiusPlanck inequality (613)1 will result in the demacrnition of the reducedmomentum degux sup1brvbar and the mass-specimacrc entropy density S Its conductive sup-plement (613)2 the Fourier inequality suggests the demacrnition of the reduced non-mechanical energy degux sup1Q along the lines of the classical linear heat conduction intro-duced by Fourier in 1822 Finally the mass degux R will be introduced constitutively
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2565
in the context of classical linear mass diregusion according to Fickrsquos law Here wewill thus restrict ourselves to a thermo-hyperelastic-model problem for which all thedissipation is caused exclusively by heat conduction and possibly by an additionalopen-system contribution of the `outside worldrsquo In what follows we shall make useof the multiplicative decomposition of the free energy ordf 0
ordf 0 = raquo 0 ordf (71)
Thereby the mass-specimacrc free-energy density ordf is expressed in terms of the materialdensity raquo 0 the deformation gradient F and the absolute temperature sup3 with a pos-sible explicit dependence on the material placement X Within the thermodynamicsof open systems the material density raquo 0 is allowed to vary in space and time is thusintroduced as function of the material placement X and the time t
ordf = ordf ( raquo 0 F sup3 X) raquo 0 = raquo 0(X t) (72)
Consequently the material time derivative of the free-energy density is formally givenin the form
Dt ordf = D raquo 0ordf Dt raquo 0 + DF ordf DtF + D sup3 ordf Dt sup3 (73)
The evaluation of the ClausiusPlanck inequality (613)1
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 + [ sup1brvbar t iexcl raquo 0DF ordf ] DtF iexcl [ raquo 0S + raquo 0 D sup3 ordf ] Dt sup3 iexcl s0 sup3 gt 0 (74)
demacrnes the reduced macrrst PiolaKirchhoreg stress tensor sup1brvbar t and the mass-specimacrcentropy S as thermodynamically conjugate variables to the deformation gradientF and the absolute temperature sup3
sup1brvbar t = raquo 0 DF ordf S = iexcl D sup3 ordf (75)
As in Cowin amp Hegedus (1976) we are left with a reduced inequality of the form
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 iexcl s0 sup3 gt 0 (76)
In biomechanics the simplest choice for the free-energy function ordf for cellular mate-rials such as open-pored biological tissues is based on the classical isotropic Neo-Hookean-type free-energy function weighted by the actual relative density [ raquo 0=raquo curren
0]n
(see for example Carter amp Hayes 1977 Gibson amp Ashby 1997)
ordf =middot
raquo 0
raquo curren0
cedil[niexcl1] 1raquo curren
0
[12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]] (77)
Here para and middot denote the classical Lamparae constants and n is an additional exponentusually allowed to vary between 1 6 n 6 35 A selection of more advanced free-energy functions for orthotropic biological tissues can be found for example in therecent collection of publications by Cowin amp Humphrey (2001) The derivatives of thefree energy ordf with respect to the material density raquo 0 and the deformation gradientF take the format
D raquo 0ordf = [n iexcl 1]
middotraquo 0
raquo curren0
cedil[niexcl2]middot 1raquo curren
0
cedil2
[ 12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]]
DF ordf =middot
raquo 0
raquo curren0
cedil[niexcl1]middot 1raquo curren
0
cedil[ middot F + [ para ln J iexcl middot ]F iexclt]
9gtgtgtgt=
gtgtgtgt
(78)
Proc R Soc Lond A (2003)
2566 E Kuhl and P Steinmann
whereby the macrrst derivative can alternatively be expressed as D raquo 0ordf = [n iexcl 1] ordf =raquo 0
According to equation (75) the reduced macrrst PiolaKirchhoreg stress tensor
sup1brvbar t =middot
raquo 0
raquo curren0
cediln
[ middot F + [ para ln J iexcl middot ]F iexclt] (79)
can be understood as the classical Neo-Hookean stress tensor weighted by the actualrelative density [ raquo 0=raquo curren
0]n The reduced dissipation inequality
iexcl [n iexcl 1] ordf [Div R + R0] + sup3 [Div S iexcl S0] gt 0 (710)
places implicit restrictions on the dissipation generated by the density evolution Dt raquo 0
through the mass degux R and the mass source R0 This amount of dissipation hasat least to be compensated by an appropriate constitutive assumption for the extraexternal entropy input s
0 through the extra entropy degux S and the extra entropysource S0 eg
S = [n iexcl 1] ordf1sup3
R S0 = iexcl [n iexcl 1] ordf1sup3
R0 (711)
Similar to the context of chemomechanics the degux r or R is usually related to thespatial or material gradient of the density rx raquo 0 or rX raquo 0 as
r = R0b cent rx raquo 0 R = rtB cent rX raquo 0 (712)
in analogy to Fickrsquos law for concentrations Here R0 and rt denote the mass-conduction coeplusmncient introducing either a materially or a spatially isotropicresponse In the context of biomechanics we typically macrnd variations of the con-stitutive equation
R0 =middot
raquo 0
raquo curren0
cediliexclm
ordf 0 iexcl ordf curren0 (713)
for the mass source R0 where raquo curren0 and ordf curren
0 denote the reference density and the refer-ence free energy respectively while m is an additional exponent that is commonlychosen to m gt n (see Harrigan amp Hamilton 1993) Finally the evaluation of theFourier inequality (613)2 as sup1d con
0 = iexcl sup1Q cent rX ln sup3 gt 0 suggests the demacrnition of themass-specimacrc non-mechanical energy degux sup1q or sup1Q according to Fourierrsquos law as
sup1q = iexcl K0b cent rx sup3 sup1Q = iexcl ktB cent rX sup3 (714)
with K0 and kt denoting the materially or spatially isotropic conductivity In order toa priori guarantee the satisfaction of the Fourier inequality (613)2 the conductivityis required to be non-negative K0 gt 0 and kt gt 0
8 Conclusion
We have presented a general framework for the thermodynamics of open systemsThe derived macreld equations are believed to be particularly useful in biomechanicalor chemomechanical applications where attention is conmacrned to one individual sub-system of the overall matter present Due to the fact that this open subsystem isallowed to constantly gain or lose mass the balance of mass had to be enhancedby additional surface and volume terms redegecting the interaction with the `outsideworldrsquo Since the newly created mass carries a particular amount of momentum
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2567
energy and entropy all the other balance equations had to be reformulated as wellTo clarify the indeguence of the changes in mass we have introduced the notions of`volume-specimacrcrsquo and `mass-specimacrcrsquo formats The former accounts for the total indegu-ence of the changes in mass through explicit mass-dependent and additional implicitopen-system contributions The latter however is free from all the mass-dependentextra terms and thus takes the familiar structure known from classical continuumthermodynamics The mass-specimacrc format is believed to be particularly useful sinceit parallels the framework of the closed-system case Consequently permissible con-stitutive relations can be derived from the mass-specimacrc version of the dissipationinequality The underlying procedure has been illustrated for the model problem ofthermo-hyperelasticity
References
Bowen R M 1976 Theory of mixtures In Continuum physics vol III Mixtures and EM macreldtheories (ed A C Eringen) pp 1127 Academic
Carter D R amp Hayes W C 1977 The behavior of bone as a two-phase porous structure JBone Joint Surg Am 59 785794
Coleman B D amp Noll W 1963 The thermodynamics of elastic materials with heat conductionand viscosity Arch Ration Mech Analysis 13 167178
Cowin S C amp Hegedus D H 1976 Bone remodelling I Theory of adaptive elasticity JElastic 6 313326
Cowin S C amp Humphrey J D 2001 Cardiovascular soft tissue mechanics Dordrecht Kluwer
de Boer R 2000 Theory of porous media Springer
Diebels S 2000 Mikropolare Zweiphasenmodelle Formulierung auf der Basis der TheoriePoroser Medien Habilitationsschrift Bericht aus dem Institut fur Mechanik (Bauwesen)Nr II-4 Universitat Stuttgart
Ehlers W 2002 Foundations of multiphasic and porous materials In Porous media theoryexperiments and numerical applications (ed W Ehlers amp J Bluhm) pp 386 Springer
Epstein M amp Maugin G A 2000 Thermomechanics of volumetric growth in uniform bodiesInt J Plasticity 16 951978
Gibson L J amp Ashby M F 1997 The mechanics of three-dimensional cellular materials ProcR Soc Lond A 382 4359
Goldstein H 1950 Classical mechanics Addison-Wesley
Harrigan T P amp Hamilton J J 1993 Finite element simulation of adaptive bone remodellinga stability criterion and a time-stepping method Int J Numer Meth Engng 36 837854
Haupt P 2000 Continuum mechanics and theory of materials Springer
Humphrey J D 2002 Cardiovasular solid mechanics Springer
Humphrey J D amp Rajagopal K R 2002 A constrained mixture model for growth and remod-eling of soft tissues Math Models Meth Appl Sci 12 407430
Liu I S 1972 Method of Lagrange multipliers for exploitation of the entropy principle ArchRation Mech Analysis 46 131148
Liu I S 2002 Continuum mechanics Springer
Malvern L E 1969 Introduction to the mechanics of a continuous medium Englewood Clireg sNJ Prentice Hall
Maugin G A 1993 Material inhomogenities in elasticity London Chapman amp Hall
Maugin G A 1999 The thermomechanics of nonlinear irreversible behaviors World Scientimacrc
Muller I 1973 Thermodynamik die Grundlagen der Materialtheorie Dusseldorf BertelsmannUniversitatsverlag
Proc R Soc Lond A (2003)
2568 E Kuhl and P Steinmann
Muller I 1994 Grundzuge der Thermodynamik Springer
Runesson K 1978 On nonlinear consolidation of soft clay PhD thesis Department of StructuralMechanics Chalmers University of Technology Goteborg Sweden
Schrodinger E 1944 What is life Cambridge University Press
Taber L A 1995 Biomechanics of growth remodeling and morphogenesis Appl Mech Rev48 487545
Truesdell C amp Toupin R 1960 The classical macreld theories In Handbuch der Physik (edS Flugge) vol 3 Springer
Wu T Hutter K amp Svendsen B 1998 On shear deg ow of a saturated icesediment mixture withthermodynamic equilibrium pressure and momentum exchange Proc R Soc Lond A 4547188
Proc R Soc Lond A (2003)

Thermodynamics for open systems 2565
in the context of classical linear mass diregusion according to Fickrsquos law Here wewill thus restrict ourselves to a thermo-hyperelastic-model problem for which all thedissipation is caused exclusively by heat conduction and possibly by an additionalopen-system contribution of the `outside worldrsquo In what follows we shall make useof the multiplicative decomposition of the free energy ordf 0
ordf 0 = raquo 0 ordf (71)
Thereby the mass-specimacrc free-energy density ordf is expressed in terms of the materialdensity raquo 0 the deformation gradient F and the absolute temperature sup3 with a pos-sible explicit dependence on the material placement X Within the thermodynamicsof open systems the material density raquo 0 is allowed to vary in space and time is thusintroduced as function of the material placement X and the time t
ordf = ordf ( raquo 0 F sup3 X) raquo 0 = raquo 0(X t) (72)
Consequently the material time derivative of the free-energy density is formally givenin the form
Dt ordf = D raquo 0ordf Dt raquo 0 + DF ordf DtF + D sup3 ordf Dt sup3 (73)
The evaluation of the ClausiusPlanck inequality (613)1
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 + [ sup1brvbar t iexcl raquo 0DF ordf ] DtF iexcl [ raquo 0S + raquo 0 D sup3 ordf ] Dt sup3 iexcl s0 sup3 gt 0 (74)
demacrnes the reduced macrrst PiolaKirchhoreg stress tensor sup1brvbar t and the mass-specimacrcentropy S as thermodynamically conjugate variables to the deformation gradientF and the absolute temperature sup3
sup1brvbar t = raquo 0 DF ordf S = iexcl D sup3 ordf (75)
As in Cowin amp Hegedus (1976) we are left with a reduced inequality of the form
sup1d loc0 = iexcl raquo 0 D raquo 0
ordf Dt raquo 0 iexcl s0 sup3 gt 0 (76)
In biomechanics the simplest choice for the free-energy function ordf for cellular mate-rials such as open-pored biological tissues is based on the classical isotropic Neo-Hookean-type free-energy function weighted by the actual relative density [ raquo 0=raquo curren
0]n
(see for example Carter amp Hayes 1977 Gibson amp Ashby 1997)
ordf =middot
raquo 0
raquo curren0
cedil[niexcl1] 1raquo curren
0
[12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]] (77)
Here para and middot denote the classical Lamparae constants and n is an additional exponentusually allowed to vary between 1 6 n 6 35 A selection of more advanced free-energy functions for orthotropic biological tissues can be found for example in therecent collection of publications by Cowin amp Humphrey (2001) The derivatives of thefree energy ordf with respect to the material density raquo 0 and the deformation gradientF take the format
D raquo 0ordf = [n iexcl 1]
middotraquo 0
raquo curren0
cedil[niexcl2]middot 1raquo curren
0
cedil2
[ 12para ln2 J + 1
2middot [b 1 iexcl 3 iexcl 2 ln J ]]
DF ordf =middot
raquo 0
raquo curren0
cedil[niexcl1]middot 1raquo curren
0
cedil[ middot F + [ para ln J iexcl middot ]F iexclt]
9gtgtgtgt=
gtgtgtgt
(78)
Proc R Soc Lond A (2003)
2566 E Kuhl and P Steinmann
whereby the macrrst derivative can alternatively be expressed as D raquo 0ordf = [n iexcl 1] ordf =raquo 0
According to equation (75) the reduced macrrst PiolaKirchhoreg stress tensor
sup1brvbar t =middot
raquo 0
raquo curren0
cediln
[ middot F + [ para ln J iexcl middot ]F iexclt] (79)
can be understood as the classical Neo-Hookean stress tensor weighted by the actualrelative density [ raquo 0=raquo curren
0]n The reduced dissipation inequality
iexcl [n iexcl 1] ordf [Div R + R0] + sup3 [Div S iexcl S0] gt 0 (710)
places implicit restrictions on the dissipation generated by the density evolution Dt raquo 0
through the mass degux R and the mass source R0 This amount of dissipation hasat least to be compensated by an appropriate constitutive assumption for the extraexternal entropy input s
0 through the extra entropy degux S and the extra entropysource S0 eg
S = [n iexcl 1] ordf1sup3
R S0 = iexcl [n iexcl 1] ordf1sup3
R0 (711)
Similar to the context of chemomechanics the degux r or R is usually related to thespatial or material gradient of the density rx raquo 0 or rX raquo 0 as
r = R0b cent rx raquo 0 R = rtB cent rX raquo 0 (712)
in analogy to Fickrsquos law for concentrations Here R0 and rt denote the mass-conduction coeplusmncient introducing either a materially or a spatially isotropicresponse In the context of biomechanics we typically macrnd variations of the con-stitutive equation
R0 =middot
raquo 0
raquo curren0
cediliexclm
ordf 0 iexcl ordf curren0 (713)
for the mass source R0 where raquo curren0 and ordf curren
0 denote the reference density and the refer-ence free energy respectively while m is an additional exponent that is commonlychosen to m gt n (see Harrigan amp Hamilton 1993) Finally the evaluation of theFourier inequality (613)2 as sup1d con
0 = iexcl sup1Q cent rX ln sup3 gt 0 suggests the demacrnition of themass-specimacrc non-mechanical energy degux sup1q or sup1Q according to Fourierrsquos law as
sup1q = iexcl K0b cent rx sup3 sup1Q = iexcl ktB cent rX sup3 (714)
with K0 and kt denoting the materially or spatially isotropic conductivity In order toa priori guarantee the satisfaction of the Fourier inequality (613)2 the conductivityis required to be non-negative K0 gt 0 and kt gt 0
8 Conclusion
We have presented a general framework for the thermodynamics of open systemsThe derived macreld equations are believed to be particularly useful in biomechanicalor chemomechanical applications where attention is conmacrned to one individual sub-system of the overall matter present Due to the fact that this open subsystem isallowed to constantly gain or lose mass the balance of mass had to be enhancedby additional surface and volume terms redegecting the interaction with the `outsideworldrsquo Since the newly created mass carries a particular amount of momentum
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2567
energy and entropy all the other balance equations had to be reformulated as wellTo clarify the indeguence of the changes in mass we have introduced the notions of`volume-specimacrcrsquo and `mass-specimacrcrsquo formats The former accounts for the total indegu-ence of the changes in mass through explicit mass-dependent and additional implicitopen-system contributions The latter however is free from all the mass-dependentextra terms and thus takes the familiar structure known from classical continuumthermodynamics The mass-specimacrc format is believed to be particularly useful sinceit parallels the framework of the closed-system case Consequently permissible con-stitutive relations can be derived from the mass-specimacrc version of the dissipationinequality The underlying procedure has been illustrated for the model problem ofthermo-hyperelasticity
References
Bowen R M 1976 Theory of mixtures In Continuum physics vol III Mixtures and EM macreldtheories (ed A C Eringen) pp 1127 Academic
Carter D R amp Hayes W C 1977 The behavior of bone as a two-phase porous structure JBone Joint Surg Am 59 785794
Coleman B D amp Noll W 1963 The thermodynamics of elastic materials with heat conductionand viscosity Arch Ration Mech Analysis 13 167178
Cowin S C amp Hegedus D H 1976 Bone remodelling I Theory of adaptive elasticity JElastic 6 313326
Cowin S C amp Humphrey J D 2001 Cardiovascular soft tissue mechanics Dordrecht Kluwer
de Boer R 2000 Theory of porous media Springer
Diebels S 2000 Mikropolare Zweiphasenmodelle Formulierung auf der Basis der TheoriePoroser Medien Habilitationsschrift Bericht aus dem Institut fur Mechanik (Bauwesen)Nr II-4 Universitat Stuttgart
Ehlers W 2002 Foundations of multiphasic and porous materials In Porous media theoryexperiments and numerical applications (ed W Ehlers amp J Bluhm) pp 386 Springer
Epstein M amp Maugin G A 2000 Thermomechanics of volumetric growth in uniform bodiesInt J Plasticity 16 951978
Gibson L J amp Ashby M F 1997 The mechanics of three-dimensional cellular materials ProcR Soc Lond A 382 4359
Goldstein H 1950 Classical mechanics Addison-Wesley
Harrigan T P amp Hamilton J J 1993 Finite element simulation of adaptive bone remodellinga stability criterion and a time-stepping method Int J Numer Meth Engng 36 837854
Haupt P 2000 Continuum mechanics and theory of materials Springer
Humphrey J D 2002 Cardiovasular solid mechanics Springer
Humphrey J D amp Rajagopal K R 2002 A constrained mixture model for growth and remod-eling of soft tissues Math Models Meth Appl Sci 12 407430
Liu I S 1972 Method of Lagrange multipliers for exploitation of the entropy principle ArchRation Mech Analysis 46 131148
Liu I S 2002 Continuum mechanics Springer
Malvern L E 1969 Introduction to the mechanics of a continuous medium Englewood Clireg sNJ Prentice Hall
Maugin G A 1993 Material inhomogenities in elasticity London Chapman amp Hall
Maugin G A 1999 The thermomechanics of nonlinear irreversible behaviors World Scientimacrc
Muller I 1973 Thermodynamik die Grundlagen der Materialtheorie Dusseldorf BertelsmannUniversitatsverlag
Proc R Soc Lond A (2003)
2568 E Kuhl and P Steinmann
Muller I 1994 Grundzuge der Thermodynamik Springer
Runesson K 1978 On nonlinear consolidation of soft clay PhD thesis Department of StructuralMechanics Chalmers University of Technology Goteborg Sweden
Schrodinger E 1944 What is life Cambridge University Press
Taber L A 1995 Biomechanics of growth remodeling and morphogenesis Appl Mech Rev48 487545
Truesdell C amp Toupin R 1960 The classical macreld theories In Handbuch der Physik (edS Flugge) vol 3 Springer
Wu T Hutter K amp Svendsen B 1998 On shear deg ow of a saturated icesediment mixture withthermodynamic equilibrium pressure and momentum exchange Proc R Soc Lond A 4547188
Proc R Soc Lond A (2003)

2566 E Kuhl and P Steinmann
whereby the macrrst derivative can alternatively be expressed as D raquo 0ordf = [n iexcl 1] ordf =raquo 0
According to equation (75) the reduced macrrst PiolaKirchhoreg stress tensor
sup1brvbar t =middot
raquo 0
raquo curren0
cediln
[ middot F + [ para ln J iexcl middot ]F iexclt] (79)
can be understood as the classical Neo-Hookean stress tensor weighted by the actualrelative density [ raquo 0=raquo curren
0]n The reduced dissipation inequality
iexcl [n iexcl 1] ordf [Div R + R0] + sup3 [Div S iexcl S0] gt 0 (710)
places implicit restrictions on the dissipation generated by the density evolution Dt raquo 0
through the mass degux R and the mass source R0 This amount of dissipation hasat least to be compensated by an appropriate constitutive assumption for the extraexternal entropy input s
0 through the extra entropy degux S and the extra entropysource S0 eg
S = [n iexcl 1] ordf1sup3
R S0 = iexcl [n iexcl 1] ordf1sup3
R0 (711)
Similar to the context of chemomechanics the degux r or R is usually related to thespatial or material gradient of the density rx raquo 0 or rX raquo 0 as
r = R0b cent rx raquo 0 R = rtB cent rX raquo 0 (712)
in analogy to Fickrsquos law for concentrations Here R0 and rt denote the mass-conduction coeplusmncient introducing either a materially or a spatially isotropicresponse In the context of biomechanics we typically macrnd variations of the con-stitutive equation
R0 =middot
raquo 0
raquo curren0
cediliexclm
ordf 0 iexcl ordf curren0 (713)
for the mass source R0 where raquo curren0 and ordf curren
0 denote the reference density and the refer-ence free energy respectively while m is an additional exponent that is commonlychosen to m gt n (see Harrigan amp Hamilton 1993) Finally the evaluation of theFourier inequality (613)2 as sup1d con
0 = iexcl sup1Q cent rX ln sup3 gt 0 suggests the demacrnition of themass-specimacrc non-mechanical energy degux sup1q or sup1Q according to Fourierrsquos law as
sup1q = iexcl K0b cent rx sup3 sup1Q = iexcl ktB cent rX sup3 (714)
with K0 and kt denoting the materially or spatially isotropic conductivity In order toa priori guarantee the satisfaction of the Fourier inequality (613)2 the conductivityis required to be non-negative K0 gt 0 and kt gt 0
8 Conclusion
We have presented a general framework for the thermodynamics of open systemsThe derived macreld equations are believed to be particularly useful in biomechanicalor chemomechanical applications where attention is conmacrned to one individual sub-system of the overall matter present Due to the fact that this open subsystem isallowed to constantly gain or lose mass the balance of mass had to be enhancedby additional surface and volume terms redegecting the interaction with the `outsideworldrsquo Since the newly created mass carries a particular amount of momentum
Proc R Soc Lond A (2003)
Thermodynamics for open systems 2567
energy and entropy all the other balance equations had to be reformulated as wellTo clarify the indeguence of the changes in mass we have introduced the notions of`volume-specimacrcrsquo and `mass-specimacrcrsquo formats The former accounts for the total indegu-ence of the changes in mass through explicit mass-dependent and additional implicitopen-system contributions The latter however is free from all the mass-dependentextra terms and thus takes the familiar structure known from classical continuumthermodynamics The mass-specimacrc format is believed to be particularly useful sinceit parallels the framework of the closed-system case Consequently permissible con-stitutive relations can be derived from the mass-specimacrc version of the dissipationinequality The underlying procedure has been illustrated for the model problem ofthermo-hyperelasticity
References
Bowen R M 1976 Theory of mixtures In Continuum physics vol III Mixtures and EM macreldtheories (ed A C Eringen) pp 1127 Academic
Carter D R amp Hayes W C 1977 The behavior of bone as a two-phase porous structure JBone Joint Surg Am 59 785794
Coleman B D amp Noll W 1963 The thermodynamics of elastic materials with heat conductionand viscosity Arch Ration Mech Analysis 13 167178
Cowin S C amp Hegedus D H 1976 Bone remodelling I Theory of adaptive elasticity JElastic 6 313326
Cowin S C amp Humphrey J D 2001 Cardiovascular soft tissue mechanics Dordrecht Kluwer
de Boer R 2000 Theory of porous media Springer
Diebels S 2000 Mikropolare Zweiphasenmodelle Formulierung auf der Basis der TheoriePoroser Medien Habilitationsschrift Bericht aus dem Institut fur Mechanik (Bauwesen)Nr II-4 Universitat Stuttgart
Ehlers W 2002 Foundations of multiphasic and porous materials In Porous media theoryexperiments and numerical applications (ed W Ehlers amp J Bluhm) pp 386 Springer
Epstein M amp Maugin G A 2000 Thermomechanics of volumetric growth in uniform bodiesInt J Plasticity 16 951978
Gibson L J amp Ashby M F 1997 The mechanics of three-dimensional cellular materials ProcR Soc Lond A 382 4359
Goldstein H 1950 Classical mechanics Addison-Wesley
Harrigan T P amp Hamilton J J 1993 Finite element simulation of adaptive bone remodellinga stability criterion and a time-stepping method Int J Numer Meth Engng 36 837854
Haupt P 2000 Continuum mechanics and theory of materials Springer
Humphrey J D 2002 Cardiovasular solid mechanics Springer
Humphrey J D amp Rajagopal K R 2002 A constrained mixture model for growth and remod-eling of soft tissues Math Models Meth Appl Sci 12 407430
Liu I S 1972 Method of Lagrange multipliers for exploitation of the entropy principle ArchRation Mech Analysis 46 131148
Liu I S 2002 Continuum mechanics Springer
Malvern L E 1969 Introduction to the mechanics of a continuous medium Englewood Clireg sNJ Prentice Hall
Maugin G A 1993 Material inhomogenities in elasticity London Chapman amp Hall
Maugin G A 1999 The thermomechanics of nonlinear irreversible behaviors World Scientimacrc
Muller I 1973 Thermodynamik die Grundlagen der Materialtheorie Dusseldorf BertelsmannUniversitatsverlag
Proc R Soc Lond A (2003)
2568 E Kuhl and P Steinmann
Muller I 1994 Grundzuge der Thermodynamik Springer
Runesson K 1978 On nonlinear consolidation of soft clay PhD thesis Department of StructuralMechanics Chalmers University of Technology Goteborg Sweden
Schrodinger E 1944 What is life Cambridge University Press
Taber L A 1995 Biomechanics of growth remodeling and morphogenesis Appl Mech Rev48 487545
Truesdell C amp Toupin R 1960 The classical macreld theories In Handbuch der Physik (edS Flugge) vol 3 Springer
Wu T Hutter K amp Svendsen B 1998 On shear deg ow of a saturated icesediment mixture withthermodynamic equilibrium pressure and momentum exchange Proc R Soc Lond A 4547188
Proc R Soc Lond A (2003)

Thermodynamics for open systems 2567
energy and entropy all the other balance equations had to be reformulated as wellTo clarify the indeguence of the changes in mass we have introduced the notions of`volume-specimacrcrsquo and `mass-specimacrcrsquo formats The former accounts for the total indegu-ence of the changes in mass through explicit mass-dependent and additional implicitopen-system contributions The latter however is free from all the mass-dependentextra terms and thus takes the familiar structure known from classical continuumthermodynamics The mass-specimacrc format is believed to be particularly useful sinceit parallels the framework of the closed-system case Consequently permissible con-stitutive relations can be derived from the mass-specimacrc version of the dissipationinequality The underlying procedure has been illustrated for the model problem ofthermo-hyperelasticity
References
Bowen R M 1976 Theory of mixtures In Continuum physics vol III Mixtures and EM macreldtheories (ed A C Eringen) pp 1127 Academic
Carter D R amp Hayes W C 1977 The behavior of bone as a two-phase porous structure JBone Joint Surg Am 59 785794
Coleman B D amp Noll W 1963 The thermodynamics of elastic materials with heat conductionand viscosity Arch Ration Mech Analysis 13 167178
Cowin S C amp Hegedus D H 1976 Bone remodelling I Theory of adaptive elasticity JElastic 6 313326
Cowin S C amp Humphrey J D 2001 Cardiovascular soft tissue mechanics Dordrecht Kluwer
de Boer R 2000 Theory of porous media Springer
Diebels S 2000 Mikropolare Zweiphasenmodelle Formulierung auf der Basis der TheoriePoroser Medien Habilitationsschrift Bericht aus dem Institut fur Mechanik (Bauwesen)Nr II-4 Universitat Stuttgart
Ehlers W 2002 Foundations of multiphasic and porous materials In Porous media theoryexperiments and numerical applications (ed W Ehlers amp J Bluhm) pp 386 Springer
Epstein M amp Maugin G A 2000 Thermomechanics of volumetric growth in uniform bodiesInt J Plasticity 16 951978
Gibson L J amp Ashby M F 1997 The mechanics of three-dimensional cellular materials ProcR Soc Lond A 382 4359
Goldstein H 1950 Classical mechanics Addison-Wesley
Harrigan T P amp Hamilton J J 1993 Finite element simulation of adaptive bone remodellinga stability criterion and a time-stepping method Int J Numer Meth Engng 36 837854
Haupt P 2000 Continuum mechanics and theory of materials Springer
Humphrey J D 2002 Cardiovasular solid mechanics Springer
Humphrey J D amp Rajagopal K R 2002 A constrained mixture model for growth and remod-eling of soft tissues Math Models Meth Appl Sci 12 407430
Liu I S 1972 Method of Lagrange multipliers for exploitation of the entropy principle ArchRation Mech Analysis 46 131148
Liu I S 2002 Continuum mechanics Springer
Malvern L E 1969 Introduction to the mechanics of a continuous medium Englewood Clireg sNJ Prentice Hall
Maugin G A 1993 Material inhomogenities in elasticity London Chapman amp Hall
Maugin G A 1999 The thermomechanics of nonlinear irreversible behaviors World Scientimacrc
Muller I 1973 Thermodynamik die Grundlagen der Materialtheorie Dusseldorf BertelsmannUniversitatsverlag
Proc R Soc Lond A (2003)
2568 E Kuhl and P Steinmann
Muller I 1994 Grundzuge der Thermodynamik Springer
Runesson K 1978 On nonlinear consolidation of soft clay PhD thesis Department of StructuralMechanics Chalmers University of Technology Goteborg Sweden
Schrodinger E 1944 What is life Cambridge University Press
Taber L A 1995 Biomechanics of growth remodeling and morphogenesis Appl Mech Rev48 487545
Truesdell C amp Toupin R 1960 The classical macreld theories In Handbuch der Physik (edS Flugge) vol 3 Springer
Wu T Hutter K amp Svendsen B 1998 On shear deg ow of a saturated icesediment mixture withthermodynamic equilibrium pressure and momentum exchange Proc R Soc Lond A 4547188
Proc R Soc Lond A (2003)

2568 E Kuhl and P Steinmann
Muller I 1994 Grundzuge der Thermodynamik Springer
Runesson K 1978 On nonlinear consolidation of soft clay PhD thesis Department of StructuralMechanics Chalmers University of Technology Goteborg Sweden
Schrodinger E 1944 What is life Cambridge University Press
Taber L A 1995 Biomechanics of growth remodeling and morphogenesis Appl Mech Rev48 487545
Truesdell C amp Toupin R 1960 The classical macreld theories In Handbuch der Physik (edS Flugge) vol 3 Springer
Wu T Hutter K amp Svendsen B 1998 On shear deg ow of a saturated icesediment mixture withthermodynamic equilibrium pressure and momentum exchange Proc R Soc Lond A 4547188
Proc R Soc Lond A (2003)