Embed Size (px)
DESCRIPTION
Mars Rover. By: Colin Shea Dan Dunn Eric Spiller. Advisors: Dr. Huggins, Dr. Malinowski. Outline. Project Summary Review of Previous Work Division of Labor Datasheet and Parts Design Changes Progress Update Schedule. Project Summary. - PowerPoint PPT Presentation
Citation preview
Mars RoverMars Rover
By: By: Colin SheaColin SheaDan DunnDan Dunn Eric SpillerEric Spiller
Advisors: Dr. Huggins, Dr. Malinowski
OutlineOutline
Project SummaryProject Summary Review of Previous WorkReview of Previous Work Division of LaborDivision of Labor Datasheet and PartsDatasheet and Parts Design ChangesDesign Changes Progress UpdateProgress Update Schedule Schedule
Project SummaryProject Summary The main objective is to design the Rover for long The main objective is to design the Rover for long
battery life that must last 7 days without recharging. battery life that must last 7 days without recharging. The Rover will use PC104 to control the interface The Rover will use PC104 to control the interface
among the user and the Rover and high level among the user and the Rover and high level software.software.
It will also use the MicroPac 535 microprocessor to It will also use the MicroPac 535 microprocessor to control low level software such as the motors for control low level software such as the motors for motion, the sonar system, and the battery level. motion, the sonar system, and the battery level.
The user will be able to enter a specific distance, The user will be able to enter a specific distance, move a predetermined distance, or rotate the Rover to move a predetermined distance, or rotate the Rover to get a preferred direction. get a preferred direction.
The user will be able to move the Rover with the use The user will be able to move the Rover with the use of their direction keys. The Rover will move in a of their direction keys. The Rover will move in a constant direction until the key is releasedconstant direction until the key is released
Previous WorkPrevious Work
20022002• Rob Shockency and Randall SatterthwaiteRob Shockency and Randall Satterthwaite• Robotic Platform Design Robotic Platform Design • EMAC 8051 and a CPLDEMAC 8051 and a CPLD• Design GoalsDesign Goals
1. Create Cheaper version of Telerobotics 1. Create Cheaper version of Telerobotics 20012001
2. Upgradeable and expandable in the future 2. Upgradeable and expandable in the future
Division of LaborDivision of Labor
Dan DunnDan Dunn Colin SheaColin Shea Eric SpillerEric Spiller
Assembly CodeAssembly Code Java/ServerJava/Server HardwareHardware
- Motor Speed - Motor Speed - Image Capture- Image Capture - DC Motors- DC Motors
- Wheel Sensors- Wheel Sensors - Rover Controls- Rover Controls - Platform - Platform ConstructionConstruction
- Battery Charge Level- Battery Charge Level - Serial Communication- Serial Communication - - H-bridge/Motor Driver H-bridge/Motor Driver
-Serial Communication-Serial Communication - Battery Charger- Battery Charger
-Acoustics Sensors-Acoustics Sensors
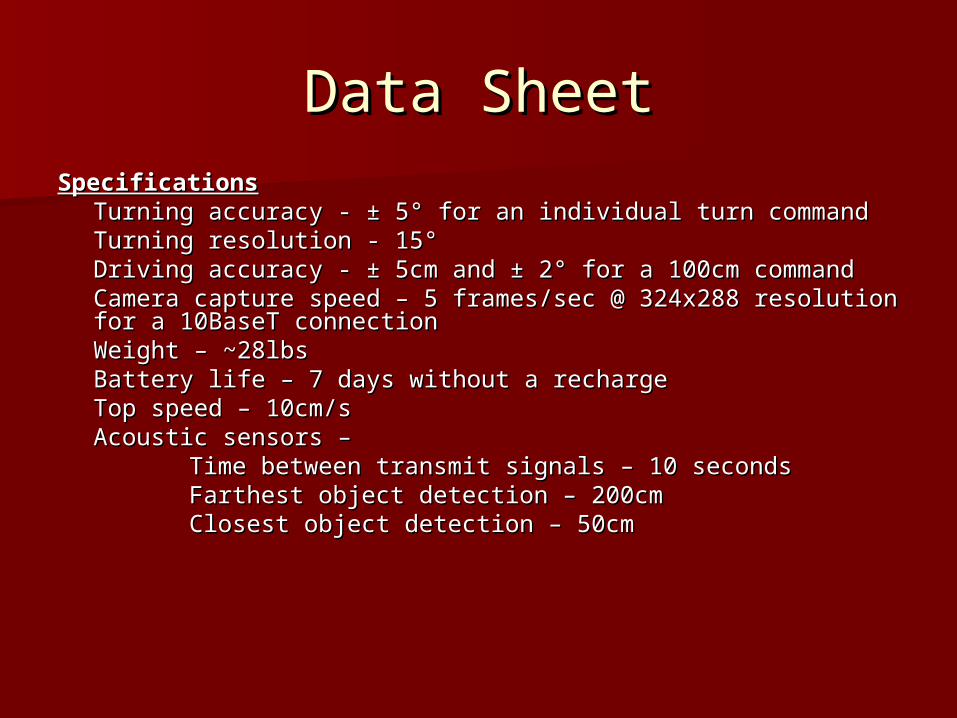
Data SheetData SheetSpecificationsSpecifications
Turning accuracy - ± 5° for an individual turn commandTurning accuracy - ± 5° for an individual turn commandTurning resolution - 15° Turning resolution - 15° Driving accuracy - ± 5cm and ± 2° for a 100cm commandDriving accuracy - ± 5cm and ± 2° for a 100cm commandCamera capture speed – 5 frames/sec @ 324x288 resolution for a Camera capture speed – 5 frames/sec @ 324x288 resolution for a 10BaseT connection10BaseT connectionWeight – ~28lbsWeight – ~28lbsBattery life – 7 days without a rechargeBattery life – 7 days without a rechargeTop speed – 10cm/sTop speed – 10cm/sAcoustic sensors – Acoustic sensors –
Time between transmit signals – 10 secondsTime between transmit signals – 10 secondsFarthest object detection – 200cmFarthest object detection – 200cmClosest object detection – 50cmClosest object detection – 50cm
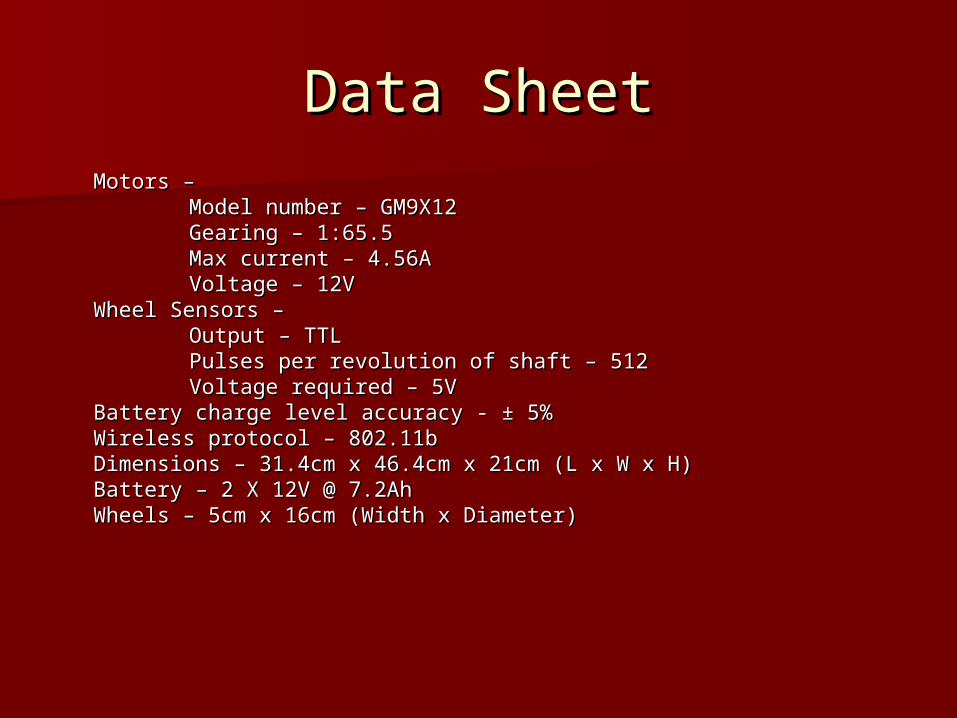
Data SheetData SheetMotors – Motors –
Model number – GM9X12Model number – GM9X12Gearing – 1:65.5Gearing – 1:65.5Max current – 4.56AMax current – 4.56AVoltage – 12VVoltage – 12V
Wheel Sensors – Wheel Sensors – Output – TTLOutput – TTLPulses per revolution of shaft – 512Pulses per revolution of shaft – 512Voltage required – 5VVoltage required – 5V
Battery charge level accuracy - ± 5%Battery charge level accuracy - ± 5%Wireless protocol – 802.11bWireless protocol – 802.11bDimensions – 31.4cm x 46.4cm x 21cm (L x W x H)Dimensions – 31.4cm x 46.4cm x 21cm (L x W x H)Battery – 2 X 12V @ 7.2Ah Battery – 2 X 12V @ 7.2Ah Wheels – 5cm x 16cm (Width x Diameter) Wheels – 5cm x 16cm (Width x Diameter)
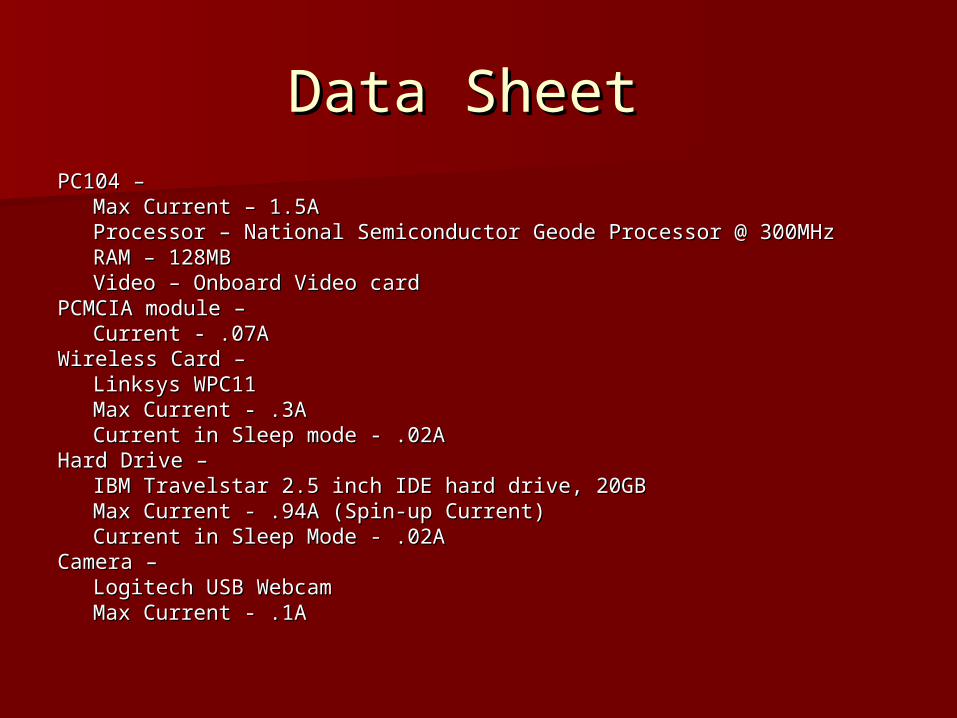
Data SheetData SheetPC104 –PC104 –
Max Current – 1.5AMax Current – 1.5AProcessor – National Semiconductor Geode Processor @ 300MHzProcessor – National Semiconductor Geode Processor @ 300MHzRAM – 128MBRAM – 128MBVideo – Onboard Video cardVideo – Onboard Video card
PCMCIA module –PCMCIA module –Current - .07ACurrent - .07A
Wireless Card – Wireless Card – Linksys WPC11Linksys WPC11Max Current - .3AMax Current - .3ACurrent in Sleep mode - .02ACurrent in Sleep mode - .02A
Hard Drive – Hard Drive – IBM Travelstar 2.5 inch IDE hard drive, 20GBIBM Travelstar 2.5 inch IDE hard drive, 20GBMax Current - .94A (Spin-up Current)Max Current - .94A (Spin-up Current)Current in Sleep Mode - .02ACurrent in Sleep Mode - .02A
Camera –Camera –Logitech USB WebcamLogitech USB WebcamMax Current - .1AMax Current - .1A

Parts and Price ListParts and Price ListEquipment List for Mars Rover
Part Qty Website Manufacturer Location of Vendor Part # Price
20 Gb 1www.pricewatch.com Hitachi
www.basoncomputer.com HIDK23DA20F $80.00
128 Mb RAM 1
www.pricewatch.com Infineon
www.18004memory.com
LG1064U/064/G3VAC $14.20
PC/MCIA Wireless Card 1 www.pricewat
ch.comLogictech www.legendmic
ro.comDL1150 $69.00
USB Webcam 1 www.pricewat
ch.comLogictech www.enpc.com 961137-0403 $16.00
PC104+ 300MHz w/ USB 1
www.square1industries.com National Semi
www.square1industries.com CM-589 $399.00
Dual PC/MCIA Adaptor 1
www.square1industries.com National Semi
www.square1industries.com CM-589
$94.00
Pittman DC Motor #9236 2
Bradley Bradley OwnedOwned Pittman www.pittmanne
t.com
$672.20
Design ChangesDesign Changes
Replaced Linux based operating Replaced Linux based operating system with Windows based system with Windows based operating systemoperating system– Video Card was incompatible with Linux although Video Card was incompatible with Linux although
manufacturer stated the card was compatiblemanufacturer stated the card was compatible– Linux operating system was not stable on PC-104 boardLinux operating system was not stable on PC-104 board
Design ChangesDesign Changes
Flash Memory Card and PCMCIA Hard Flash Memory Card and PCMCIA Hard drive replaced by Laptop Hard drivedrive replaced by Laptop Hard drive– Flash Memory Card was not capable of booting the PC-Flash Memory Card was not capable of booting the PC-
104 at start-up104 at start-up– PCMCIA Hard drive was not visible by computer until PCMCIA Hard drive was not visible by computer until
system completed start-up sequencesystem completed start-up sequence– Laptop Hard drive booted easier and still remained low Laptop Hard drive booted easier and still remained low
powerpower
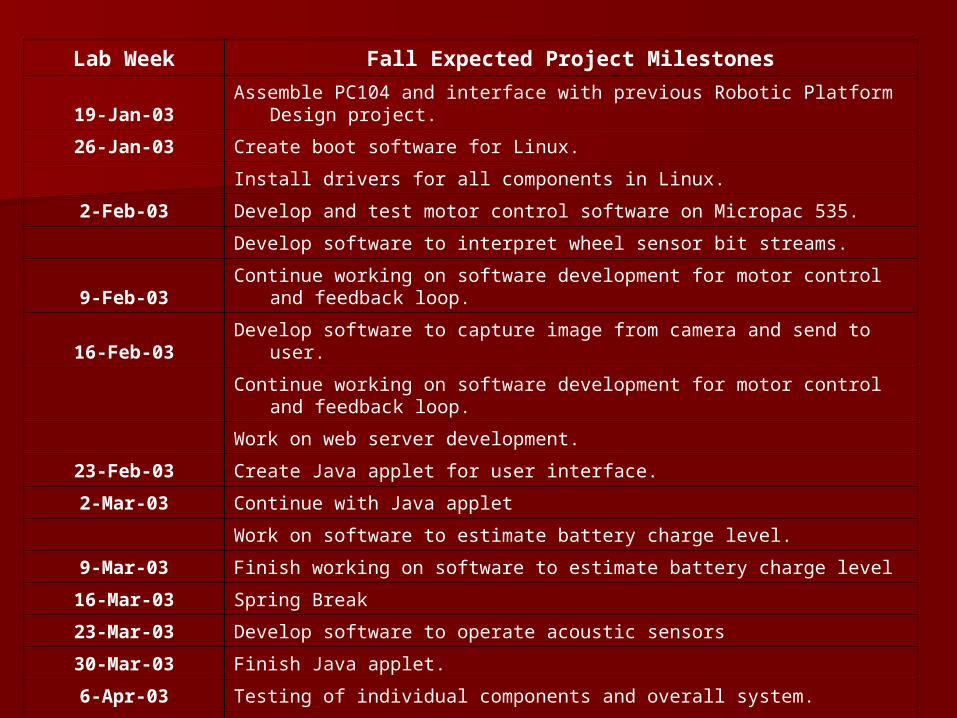
Lab Week Fall Expected Project Milestones
19-Jan-03Assemble PC104 and interface with previous Robotic Platform Design
project.
26-Jan-03 Create boot software for Linux.
Install drivers for all components in Linux.
2-Feb-03 Develop and test motor control software on Micropac 535.
Develop software to interpret wheel sensor bit streams.
9-Feb-03Continue working on software development for motor control and
feedback loop.
16-Feb-03 Develop software to capture image from camera and send to user.
Continue working on software development for motor control and
feedback loop.
Work on web server development.
23-Feb-03 Create Java applet for user interface.
2-Mar-03 Continue with Java applet
Work on software to estimate battery charge level.
9-Mar-03 Finish working on software to estimate battery charge level
16-Mar-03 Spring Break
23-Mar-03 Develop software to operate acoustic sensors
30-Mar-03 Finish Java applet.
6-Apr-03 Testing of individual components and overall system.
13-Apr-03 Testing of individual components and overall system.
20-Apr-03 Preparation for presentation and final report
27-Apr-03 Presentation
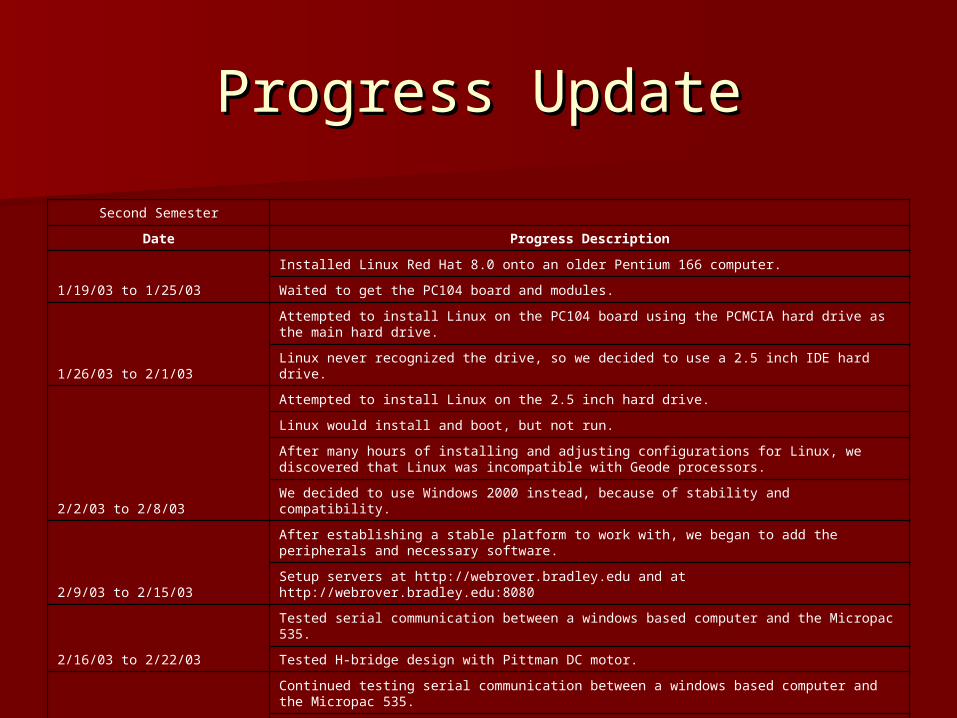
Progress UpdateProgress Update
Second Semester
Date Progress Description
1/19/03 to 1/25/03
Installed Linux Red Hat 8.0 onto an older Pentium 166 computer.
Waited to get the PC104 board and modules.
1/26/03 to 2/1/03
Attempted to install Linux on the PC104 board using the PCMCIA hard drive as the main hard drive.
Linux never recognized the drive, so we decided to use a 2.5 inch IDE hard drive.
2/2/03 to 2/8/03
Attempted to install Linux on the 2.5 inch hard drive.
Linux would install and boot, but not run.
After many hours of installing and adjusting configurations for Linux, we discovered that Linux was incompatible with Geode processors.
We decided to use Windows 2000 instead, because of stability and compatibility.
2/9/03 to 2/15/03
After establishing a stable platform to work with, we began to add the peripherals and necessary software.
Setup servers at http://webrover.bradley.edu and at http://webrover.bradley.edu:8080
2/16/03 to 2/22/03
Tested serial communication between a windows based computer and the Micropac 535.
Tested H-bridge design with Pittman DC motor.
2/23/03 to 3/01/03
Continued testing serial communication between a windows based computer and the Micropac 535.
Tested PWM signal from MicroPac 535 to generate signal for H-bride operation.
Tested H-bridge design mounted on circuit boards with 30V Pittman DC motor and later with PWM signal from MicroPac 535.
3/02/03 to 3/08/03 Reconstruct Rover and Presentation
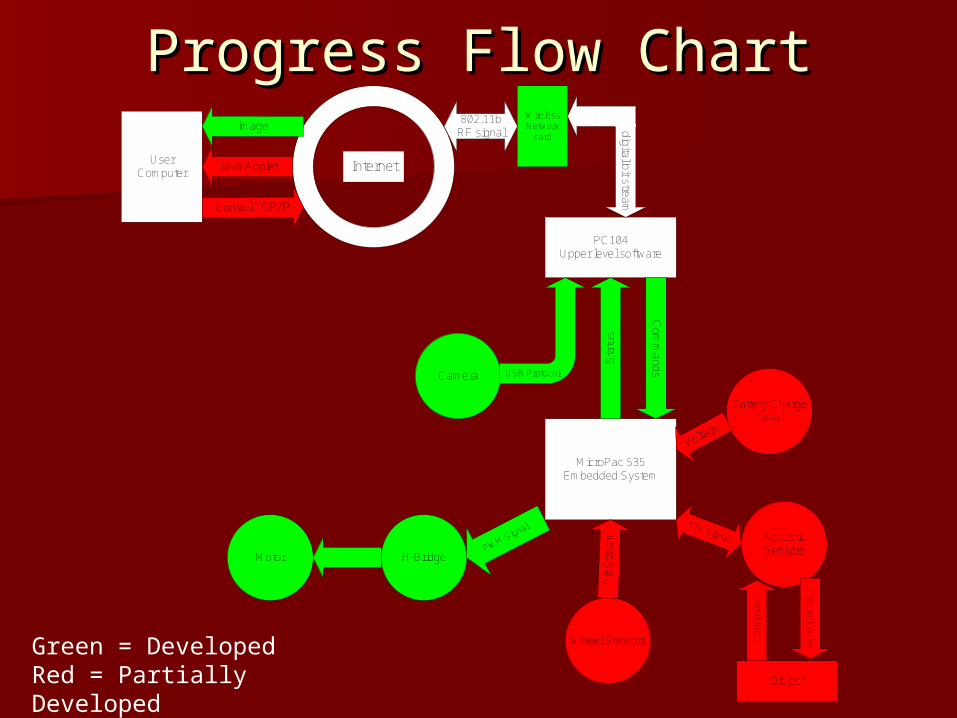
Progress Flow ChartProgress Flow Chart
UserComputer Internet
MicroPac 535Embedded System
Motor
Wheel Sensors
Battery ChargeLevel
Camera
Voltage
Control TCP/IP
Bit
Str
eam Acoustic
Sensors
PC104Upper level software
WirelessNetwork
card
802.11bRF signal dig
ital b
it stream
Tra
nsm
it pu
lse
TTL Signal
Object
USB Protocol
PWM Signal
Java Applet
Image
Com
ma
nds
Sta
tus
Ech
o p
uls
e
H-Bridge
Green = DevelopedRed = Partially Developed
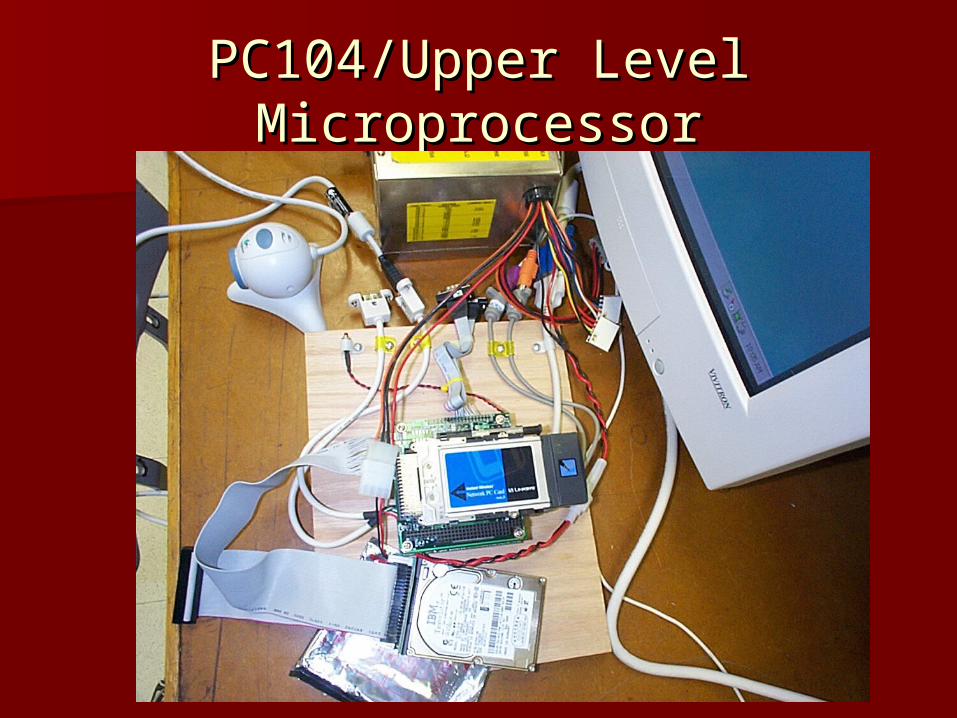
PC104/Upper Level PC104/Upper Level MicroprocessorMicroprocessor
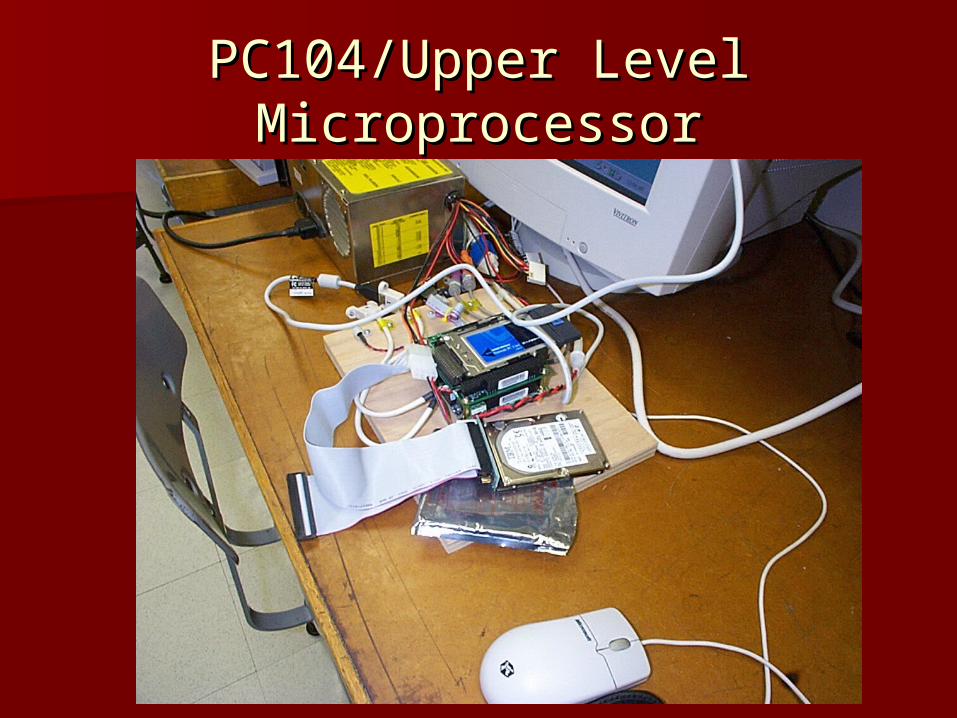
PC104/Upper Level PC104/Upper Level MicroprocessorMicroprocessor
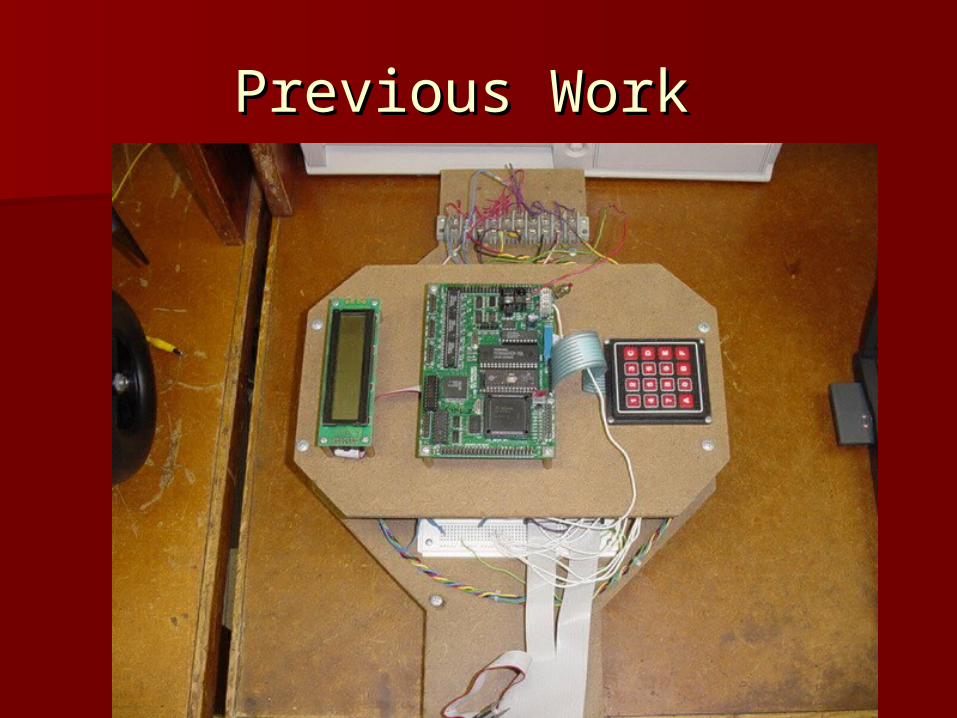
Previous Work Previous Work
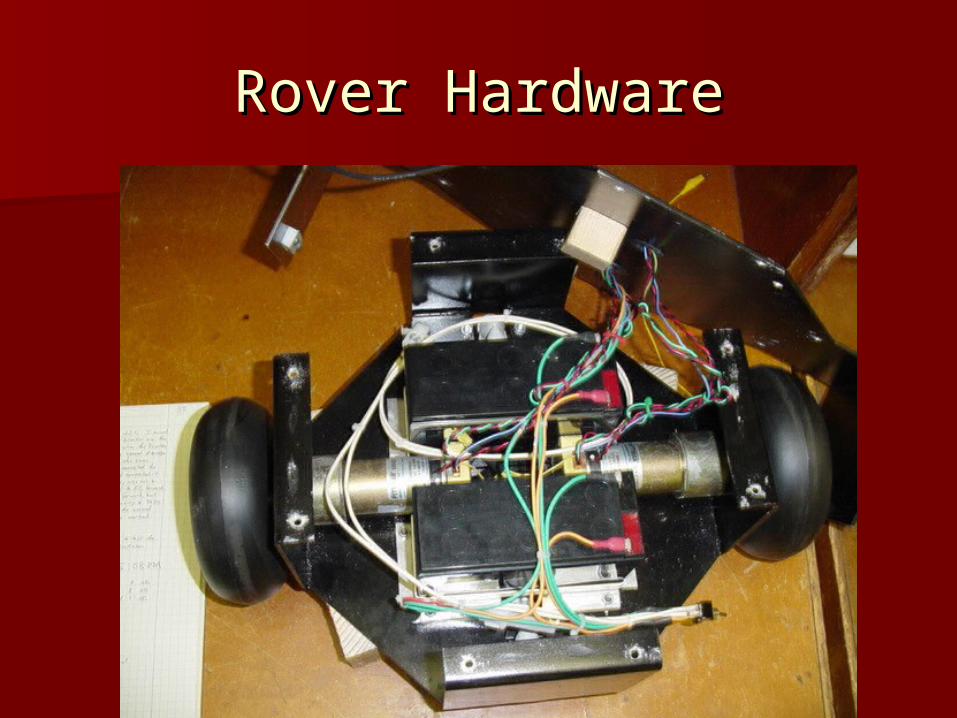
Rover HardwareRover Hardware
Questions and AnswersQuestions and Answers





























