Embed Size (px)
Citation preview

13Multidimensionalhigh-resolution channelsounding measurement
Reiner S. Thoma, Markus Landmann,Andreas Richter, and Uwe Trautwein
13.1. Introduction
The design of future mobile radio networks (beyond 3G) requires research to-wards new air interfaces which are characterized by the highest bandwidth effi-ciency and unprecedented flexibility. It is commonly understood that radio sys-tems equipped with multiple antennas at both the mobile station (MS) and thebase station (BS) have a huge potential to increase the available capacity for highbit rate wireless links, which results from a simultaneous transmission of multipledata streams from different antenna elements [1]. This multiantenna techniqueis called multiple-input multiple-output (MIMO) and can optimally exploit thespatial diversity of the multiple propagation paths existing in a rich scattering en-vironment. Conceptually, the multipath propagation of the radio channel givesrise to different spatio-temporal signatures for the different transmit data streams,which permits a receiver equipped with multiple antennas to separate those datastreams from the received signal mixture, that are otherwise not orthogonal in anyof the conventional communication signal dimensions, that is, by time, frequency,or code. Keeping this in mind, it is not really surprising that the performance of aMIMO system will strongly depend on the radio channel conditions. A key ques-tion for a system design and implementation is therefore do we find practicallyfeasible schemes that are sufficiently robust for this task? Or somewhat related,which specific features are required for a practical MIMO system to work reliablyunder a wealth of various propagation conditions?
Hence, a thorough investigation of the multidimensional wave propagationmechanisms is a prerequisite for understanding the spatial and temporal struc-ture of the channel transfer matrix, and, thus, for optimum design and realisticperformance evaluation of multiple-antenna systems. There are many attemptsto simulate the input-output behavior of the channel. The physically motivatedapproach is based on electromagnetic wave propagation analysis and uses a ray-optical model. In case of ray tracing or ray launching, a detailed database describ-ing the propagation environment is required. Other models, although ray-based

242 Multidimensional high-resolution channel sounding measurement
as well, use statistical assumptions on the geometrical distribution of scatterers(e.g., COST 259). There are also completely statistical models trying to reproducethe input/output behavior in a statistical sense by formal assumptions of corre-lation coefficients and distributions resulting at the transmit antenna and receiveantenna ports disregarding the geometrical distribution of the scatterers. A lackof nongeometric models is that they are inherently specific for a certain antennacharacteristic. For antenna-independent modeling (which allows antenna deem-bedding and embedding) it seems that geometry-based models are a must [2, 3].
Since the complexity of wave reflection, scattering, diffraction, and so forthin real propagation environments can never be completely reproduced by elec-tromagnetic simulation and because of the strong simplifications of the statisti-cal approaches, all models have to be verified and parameterized by propagationmeasurements. Moreover, channel models can be deduced directly from measure-ments in real propagation environments by estimating the geometric path param-eters from the recorded data [4]. Given a ray-optical path model, the parametersof a suitably defined propagation path model are direction of arrival (DoA) at thereceiver array, direction of departure (DoD) at the transmitter array, time delay ofarrival (TDoA), Doppler shift, and the complex, polarimetric path weight matrix.
A multidimensional channel sounder is a measuring device that allows theobservation of the time-varying multipath channel impulse response (CIR) in itsrelevant multiple dimensions. These dimensions may be temporal and spatial innature and must contain enough information on all model parameters describedabove. To this end, we need a broadband excitation signal to “sound” the chan-nel in the frequency range of interest and antenna arrays, which excite or sensethe wave field in a properly defined spatial aperture. A sounder system typicallyconsists of a mobile transmitter (Tx) which plays the role of the mobile station(MS) and a fixed receiver (Rx) in place of the base station (BS). Since the channelis reciprocal, it makes no difference if the results are interpreted as uplink or asdownlink, respectively. The receiver may also be moving if we consider a peer-to-peer communication between two mobile platforms. Both excitation and record-ing must be repetitive with a period short enough in order to make the temporalvariation statistics according to Doppler shift and small-scale fading visible. More-over, the data recording must be continuous along a precisely defined trajectoryto reproduce large-scale channel parameter variation. This all is called real-timeMIMO channel sounding and it makes the measured data usable for simulatingthe MIMO transceiver performance including link- and system-level aspects.
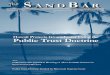
Figure 13.1 highlights the double-directional structure of the multipath chan-nel. Specifically, double-directional measurements that include joint DoA/DoDestimation allow the separation of the directional dependent influence of the mea-surement antennas from the channel measurements which is a prerequisite ofantenna-independent channel characterization.
The antenna array arrangement is of crucial importance to represent a certainsystem scenario. This applies to the typical BS or access point (AP) location in acellular- or WLAN-specific deployment scenario. The MS antenna array locationshould resemble the characteristic user roaming behavior. This may include almost

Reiner S. Thoma et al. 243
MS BS
Figure 13.1. Double-directional DoD/DoA structure of a multipath channel.
stationary user terminals but also high-mobility user platforms such as cars, air-crafts, or trains. For ad hoc and multihop networking, the situation changes com-pletely since there is no dedicated BS. Instead, both sides of the link have to rep-resent the terminal morphology and mobility. This influences the antenna arrayarchitecture, which consists of the array size and shape and of the number, orien-tation as well as of the characteristics of the individual antenna elements. Both BSand AP, for example, may have a limited angular viewing sector. The MS, actingas the user, should have a full angular coverage in order to represent arbitrary userantenna orientation. Moreover, advanced network-specific scenarios such as mul-tiple users including known and unknown interference, cooperative downlinksfrom multiple BS or AP, multihop networking and relaying, and so forth have tobe emulated by the measurement setup. Only if the measurement scenario is prop-erly defined, the recorded CIR data can be used for realistic link- and system-levelsimulation. The advantages of this measurement-based offline approach in com-parison with the prototype hardware demonstration are higher flexibility, lowercosts, and an improved perception of the transceiver’s operation. The latter is pri-marily due to more effective analysis techniques that allow the observed transceiverperformance to be traced back to the actual time-variant space-time structure andphysical propagation phenomena.
Even more specific design roles for antenna arrays apply if we have high-resolution estimation of the ray-optical multipath model in mind. The channelresponse can, in general, be observed only within a limited aperture volume thatis somewhat related to the array size, frequency bandwidth, and temporal obser-vation window. This strictly limits the achievable parameter resolution and ac-curacy in terms of DoA/DoD, TDoA, and Doppler, respectively, when classicalnonparametric estimation algorithms are applied. Therefore, high-resolution pa-rameter estimation algorithms have to be envisaged to enhance the resolution byfitting an appropriate data model to the measured data. In this case, the resolu-tion is only limited by the signal to noise ratio (SNR), antenna and device im-perfections, calibration quality, and the limited validity of the data model. Theresolution performance mainly depends on the antenna array architecture and itsmanufacturing quality, which includes low electromagnetic coupling, high elec-trical and mechanical stability and precise calibration. In the context of high-resolution channel parameter estimation, also the definition of the data modelis crucial for parameter estimation. It has to be accurate enough to represent the

244 Multidimensional high-resolution channel sounding measurement
reality of wave propagation and the influence of the measurement device. On theother hand, it must not be finicky detailed since the amount of information gath-ered by the sounder is always limited and may not be sufficient to estimate allmodel parameters. A proper choice of the model structure and dimension candramatically reduce the algorithmic complexity and enhance the accuracy and res-olution as well as the reliability of the results. There are always compromises andsimplifications, such as the narrowband assumption which presumes frequency-independent propagation mechanisms and antenna arrays, which are smaller thanthe spatial resolution of the sounding signal.
The rest of this chapter is organized as follows. Section 13.2 introduces the ad-vanced data model for high-resolution parameter estimation which includes spec-ular and diffuse scattered components. Section 13.3 describes the main design fea-tures of a typical real-time MIMO channel sounder architecture. Sections 13.4 and13.5 describe the aspects of high-resolution antenna array design and calibration,and also the Cramer-Rao lower bound (CRLB) of the angular parameter estima-tion variance is derived and calculated directly from the antenna array calibrationdata. Section 13.6 summarizes the maximum likelihood (ML) framework as it isused for high-resolution channel parameter estimation. In Section 13.7, some as-pects of sounding data usage for realistic link-level performance evaluation areoutlined. Conclusions are given in Section 13.8.
13.2. The data model
The most widely accepted data model for high-resolution channel parameter es-timation is based on a ray-optical understanding of the propagation phenomena.Propagation paths are modeled by planar, narrowband wavefronts. This is moti-vated by the idea of specular reflections at smooth surfaces. To model the influ-ence of receiver noise, a white noise component is usually added. However, it iswell known that wave propagation phenomena may also comprise diffusely scat-tered components [5]. Its contribution varies depending on the complexity of thepropagation environment. It can be almost negligible in macrocell LOS scenariosand can even dominate in complicated propagation environments such as fac-tory halls. Whereas the electromagnetic background of diffuse scattering is alreadywell understood and there are also various attempts to include diffuse scatteredcomponents into geometric channel models [6], its influence is widely neglectedin high-resolution parameter estimation from sounding measurements. However,this may have a very detrimental effect on the performance of the parameter esti-mation procedure.
Therefore, we introduce a data model comprising two components that canbe handled separately throughout the estimation procedure [7, 8]. The first partis considered as deterministic and results from a limited number of specular-likereflections. We also call it the structural part of the model since is has clear geo-metric interpretation. The second part is observed as a dense diffuse part thatis stochastic in nature and cannot be resolved by the measurement device. It re-sults from distributed diffuse scattering as it occurs in a complicated, multipath

Reiner S. Thoma et al. 245
rich environment. For example, a sounder having a measurement bandwidth of120 MHz [9, 10] gives us excellent possibilities to resolve a number of specularcomponents, even though the spatial resolution is only about 2.5 m, which cor-responds to 43 wavelengths at 5.2 GHz. Hence, in a “microscopic” sense we canexpect quite a big number of superimposed diffused components in an observeddelay bin. We call this “dense multipath model.” The resulting CIR part is thereforeadequately modeled by a complex circular normal distribution. It might be arguedthat diffuse components can be neglected in the presence of specular paths. Thisis however not consistent with our experience [11]. An explanation could be thatspecular paths can contribute to the received power only for very distinct angularconstellations. On the other hand, diffused power has the chance to reach the re-ceiver within a large (almost continuous) variety of propagation angles supposingthat there is a big number of widely distributed scatterers. Note that modeling ofdiffuse scattering for the purposes of parameter estimation does not need to modelthe individual scatterers. Rather we need a model that describes the superimposedcontributions to the observed data at the receiver.
In the discrete angular delay-Doppler domain the specular part is describedby a superposition of K R-dimensional Dirac deltas weighted by a 2 × 2 com-plex polarimetric path weight matrix with its components γxy,k, where the indicesx, y indicate polarization in azimuthal and elevation direction at Tx and Rx, re-spectively. The R structural parameters are DoD ϕT , ϑT (azimuth and elevation),TDoA τ, Doppler shift α, and DoA ϕR, ϑR:
Hδ(α, τ, ϑR,ϕR, ϑT ,ϕT
)=
K∑k=1
[γϑϑ,k γϕϑ,k
γϑϕ,k γϕϕ,k
]δ(α− αk
)δ(τ − τk
)· δ(ϕR − ϕRk
)δ(ϑR − ϑRk
)δ(ϕT − ϕTk
)δ(ϑT − ϑTk
)(13.1)
with its Fourier transformed counterpart
He(t, f , sR, lR, sT , lT
) =K∑k=1
[γϑϑ,k γϕϑ,k
γϑϕ,k γϕϕ,k
]e− j2πtαk e− j2π f τk
· e− j2πsRϕRk e− j2πsTϕTk e− j2πlTϑTk e− j2πlTϑTk
.
(13.2)
The last equation shows that the estimation of the structural parameters is essen-tially a multidimensional harmonic retrieval problem. Whereas the Doppler shiftα and TDoA τ are clearly related to the observed aperture variables t and f in timeand frequency, the Fourier transform of the DoA/DoD parameters is not directlyrelated to the physical antenna array aperture. For this, we would need a furthergeometrical transformation which will depend on the specific array architecture.We omit this transformation step here since it can be completely avoided if we

246 Multidimensional high-resolution channel sounding measurement
TxϑT
ϕT
xT
yT
zT eTτ
eRzR
yR
xRϕR
ϑR
Rx
Figure 13.2. Multidimensional specular path data model.
rely on a proper antenna calibration procedure. We call the Fourier transform ofthe angular antenna domain the effective aperture distribution function (EADF).Hence, its dimensions sT/R, lT/R are not uniquely defined in a physical sense but aresomewhat related to the geometrical dimensions of the respective antenna array.
A geometrical definition of the specular path data model (13.1) is explained inFigure 13.2. For the sake of simplicity, the DoA/DoD definitions are independentand related to the local coordinate systems of the respective Tx/Rx arrays. Notethat this model has to be considered as instantaneous which means it is specificfor a single time instant and may be slowly changing with time when the objectsof the scenario are moving. This variation of the structural parameters and theirgeometric coupling is currently not explicitly included in this model. The Dopplershift parameter may need some specific explanation since a Doppler shift impliesthat the path length changes. Phase changes on the individual propagation pathscan be resolved for varying antenna distances of at least a small number of wave-lengths. However, the respective change in delay can normally not be resolved inTDoA or DoA/DoD. Consequently, also the Doppler shift parameter can be con-sidered as local and is also subjected to change slowly with time.
Unfortunately, the data model of (13.1) and (13.2) is not directly applicablefor parameter estimation. For this we need a more concise vector/matrix notation.The condensed parameter vector Θk contains 14 real-valued unknowns describingthe six structural parameters and four complex path weight parameters of anypropagation path. The observable channel response s(Θk) in the multidimensionalaperture domain is defined by the limited observation time, finite bandwidth, andfinite (effective) antenna apertures:
s(Θk
) = γϑϑ,k · Gϑϑa(µk) + γϑϕ,k · Gϑϕa(µk
)+ γϕϑ,k · Gϕϑa
(µk
)+ γϕϕ,k · Gϕϕa
(µk
).
(13.3)
We arrange the sampled channel response in vectors as a(µk) = a(µ(R)k ) ⊗
a(µ(R−1)k ) ⊗ · · · ⊗ a(µ(1)
k ), whereby the a(µ(i)k ) are complex exponentials resulting
from Fourier transform of (13.1) and the µ(i)k are the normalized structural path
parameters which are related to their physical counterparts by a unique projectionµ(1) = f (α), µ(2) = f (τ), µ(3) = f (ϕT), µ(4) = f (ϑT), µ(5) = f (ϕR), µ(6) = f (ϑR)and a proper normalization to the respective aperture size, for example, frequency

Reiner S. Thoma et al. 247
bandwidth in case of µ(2). The linear projector matrices Gxy describe the mea-surement systems response, which is composed of the Kronecker products of thefrequency, Doppler, and spatial responses, respectively. Whereas the frequency re-sponse is represented by a diagonal matrix and the Doppler response is simply anidentity matrix, the spatial response is described by the effective aperture distri-bution function (EADF) of the antenna arrays. The EADF has been found to bea very powerful method to describe the antenna array behavior for parameter es-timation and calibration purposes. The calculation of the EADF from calibrationmeasurements is explained in more detail in Section 13.5.
Resulting from many observations of measured channel responses, an expo-nential decaying data model is defined to represent the dense multipath compo-nents in the delay (correlation) domain ψ(τ) with its corresponding frequencyresponse Ψ( f ) [8]. The parameter vector Θdds is composed of the parameters βd,τd, αd, which are the normalized coherence bandwidth, LOS delay, and maximumpower, respectively:
ψx(τ) = E|x(τ)|2 =
0, τ < τd,
α1 · 12
, τ = τd,
α1 · e−βd(τ−τd), τ > τd,
F
Ψx( f ) = α1
βd + j2π f· e− j2π f τd .
(13.4)
At the first glance, this model implies infinite bandwidth. However, the data areobserved only within the finite sounder bandwidth. This is actually a very impor-tant issue since it warrants the dense multipath model as discussed above. Thismodeling approach requires that the contribution to any delay bin consist of asuperposition of a reasonable number of diffuse components. That can be justi-fied only by a limited bandwidth. The finite bandwidth influence and additionalstationary noise component α0 are also shown in Figure 13.3.
13.3. MIMO channel sounding techniques
From a historical perspective, the first sounding experiments have been carriedout by using single-tone CW signals. This was sufficient as long as only the nar-rowband channel behavior was of interest. Single-tone CW sounding, however,gives us no information to resolve path time delays. For that, we need a frequency-domain bandwidth, which is roughly the inverse of the desired delay resolution.Sequential sounding at a number of different frequencies is the easiest approachto achieve a very high delay resolution as standard vector network analyzer tech-niques can be applied. The drawback is the resulting huge measurement time,which precludes mobile measurement. The only way out is to keep the environ-ment fixed during one series of frequency sampling measurements. This actu-ally has its equivalent in sequential sampling of the antenna array geometry and

248 Multidimensional high-resolution channel sounding measurement
τd
α0
β
α1
0 0.5 1
Normalized delay
10−9
10−7
Loga
rith
mic
PD
P
Figure 13.3. Dense multipath distribution model in the time delay domain.
may be considered as an equivalent to the synthetic antenna aperture approachin the frequency domain. Sustained measurement along some longer trajectory isclearly prohibitive. Network analyzer application also requires a cable connectionbetween Tx and Rx sites.
Short duration repetitive pulses together with envelope detectors have beenused in early broadband real-time sounding experiments. The main drawback ofthis method is the high peak-to-mean power ratio at the transmitter needed forsufficiently high SNR. Furthermore, only power delay profiles can be measured.To achieve the maximum signal to noise ratio at the receiver, excitation signals arerequired that have a low crest factor. The crest factor is given by the ratio of thepeak value of the signal to its root mean square (rms) amplitude. Minimum crestfactor signals are distinguished by a flat magnitude envelope in the time domain.At the same time, they must have a constant spectrum, which leads to a short auto-correlation function. This pulse compression approach is well known from spreadspectrum technology and makes these signals very useful for real-time identifica-tion of time-delay systems since all frequencies are instantaneously excited and aconsiderable SNR processing gain is achieved in the time domain by correlationprocessing.
Pulse compression requires noise-like structured signals. Periodic pseudoran-dom excitation signals are of special importance since they are deterministic andcan be processed in integer periods. The time period must be at least as long asthe maximum path excess time delay τmax to avoid TDoA ambiguities. With amaximum delay-Doppler spreading factor S = τmaxBmax of a typical mobile radiochannel well below 0.01, the period of the received time-variant channel responsesignal is still almost the same as of the excitation signal. This presumes that theminimum signal period time is chosen. Then the channel output can be trans-formed to the frequency domain by DFT/FFT processing without any significantleakage variance.
Probably, the most well-known examples of those excitation signals are peri-odic pseudo-random binary signals (PRBS). PRBS can be very easily generated bya shift register since only digital circuits are required. This allows to generate very

Reiner S. Thoma et al. 249
broadband excitation signals, even suitable for ultra-wideband sounding [12]. An-other advantage of PRBS is that they can be repeated in the receiver with a slightlyslower clock rate. This is applied in the classical swept time-delay cross-correlationsounder implementation [13]. This “sliding correlation” sounder requires onlyslow AD converters. The disadvantage of this principle, working sequentially indelay, is again the long measurement time which prohibits real-time operations.
The power spectrum of PRBS has the typical sinc “2-shape.” For system iden-tification purposes it can only be used up to a frequency of about 0.4 fc, wherebyfc is the clock rate [14]. Since the spectrum decays only slowly, a very high sam-pling rate or a suitable antialiasing filter at the receiver is required to avoid alias-ing. Moreover, the system under test is excited in a frequency band which is notused. This effectively throws away transmit power. Moreover, most experimentaltransmit spectrum permissions given by regulation authorities will require strictlyband-limited spectra. Then the signal must be filtered at the transmitter to a finitebandwidth. Any filtering and phase slope modification, however, will increase thecrest factor of the PRBS, which is supposed to be unity in the ideal case. This againincreases the susceptibility to nonlinear distortions.
A much more flexible excitation signal concept is known as the “periodic mul-tisine signal.” This approach is well known from frequency-domain system iden-tification in measurement engineering [14]. In communication engineering termsthis signal may be called a multicarrier spread spectrum signal (MCSSS). The MC-SSS is defined by its complex Fourier coefficients X(µ f0):
x(nt0
) =N−1∑µ=0
X(µ f0
)e j2πµ/N , (13.5)
with tp = Nt0 = 1/ f0. Once designed in the frequency domain, the correspondingtime-domain waveform x(nt0) is stored in an arbitrary waveform generator mem-ory and periodically repeated at the Tx. So it possesses all the advantages whichare discussed above for periodic signals. The difference in comparison to PRBS isthat phases and magnitudes of X(µ f0) can be arbitrarily chosen in order to opti-mize the system performance. As an example, in Figure 13.4 an MCSSS excitationsignal with uniform power spectrum is shown. The phases of the Fourier coeffi-cients are chosen to minimize the crest factor of the signal waveform. Althougha quadratic phase slope typically results in a crest factor below 2, numerical opti-mization can even further reduce the crest factor to about 1.4. Another advantageof this signal design flexibility is that also analog hardware phase distortion (e.g.,from the filters) and even nonlinear distortion (from the power amplifier) caneventually be mitigated. This means that a predefined ideal transmit signal is it-eratively predistorted throughout a calibration procedure whereby the real outputsignal is measured and optimized.
Regarding the overall spectral shape, the main advantage of MCSSS is its“brickwall-type” shape, which allows concentrating the signal energy exactly tothe band of interest. This can even be multiple bands when spectral magnitudes

250 Multidimensional high-resolution channel sounding measurement
0 0.2 0.4 0.6 0.8
Time (µs)
−1
−0.5
0
0.5
1N
orm
aliz
edm
agn
itu
de
(a)
5150 5200 5250
Frequency (MHz)
0
0.5
1
1.5
2
Nor
mal
ized
mag
nit
ude
(b)
0 0.2 0.4 0.6 0.8
Time delay (µs)
0
0.2
0.4
0.6
0.8
1
Nor
mal
ized
mag
nit
ude
(c)
5150 5200 5250
Frequency (MHz)
0
0.5
1
1.5
2
Nor
mal
ized
mag
nit
ude
(d)
Figure 13.4. Broadband multicarrier spread spectrum signal (MCSSS) in the time and frequency do-main: (a) Tx waveform, (b) Tx spectrum, (c) estimated CIR, and (d) received signal spectrum.
are set to zero. One example application is FDD sounding which means that thesounder simultaneously excites both the uplink and the downlink band. To meetthe UTRA FDD specifications, for example, we need a total bandwidth of morethan 200 MHz. Note that the desired full flexibility of the excitation signal requiresquadrature up conversion at the transmitter.
At the receiver side the signal is filtered, down converted, and demodulatedby a quadrature demodulator. An efficient architecture is based on low-IF ana-log down conversion, IF sampling, and final digital down conversion. In case of240 MHz bandwidth, 160 MHz IF frequency and 640 MHz ADC sampling rate areadequate. For real-time processing Nyquist sampling at the receiver in most cases isa must. One integer period of the received time-variant channel response y(t,nt0)signal is sampled and transformed to the frequency domain by FFT processing.The final quadrature down conversion is accomplished by cyclic FFT shifting ofthe result which finally gives the baseband representation Y(t,µ f0) of the receivedsignal. In case of multipath transmission, frequency-selective fading as shown, forexample, in Figure 13.4d shapes the power spectrum of the received signal. An

Reiner S. Thoma et al. 251
estimate of the time-variant channel frequency response is calculated from input-output cross-correlation as
H(t,µ f0
) = Y(t,µ f0
)X∗(µ f0)∣∣X(
µ f0)∣∣2 = Y
(t,µ f0
)X(µ f0
) . (13.6)
The uniform shape of the excitation signal spectrum and its low crest factorat the transmitter maximizes the SNR. With integer period data acquisition thereis no additional estimation variance resulting from leakage noise [14]. Therefore,the required data acquisition time is minimal and the estimation variance is assmall as possible. With Nyquist sampling at the receiver, the highest possible mea-surement repetition rate for a channel with a maximum excess time delay τmax
can be achieved, which is 1/τmax. The lower limit is given by the Doppler band-width Bmax. It results from the Nyquist sampling criterion of the fast fading chan-nel response. However, since the delay-Doppler spreading factor S = τmax · Bmax
of a typical mobile radio channel is well below 0.01, there are large gaps allowedbetween successive measured channel response functions without sacrificing theNyquist criterion. Normally, there is no need to measure faster since intermediateCIRs (which may be required for link-level simulation) can always be calculated byband-limited interpolation. Nevertheless, faster measurement speed may be desir-able if further noise reduction by synchronous averaging of a temporal sequencey(t,nt0) is aimed. Only if the averaging window approaches or exceeds 1/Bmax thiswould act as a Doppler lowpass filter and potentially would suppress fast fading.
Figure 13.4 shows also the impulse response which would result from inverseFourier transform of H(t,µ f0). Calculating the impulse response in this way re-quires a tapering window function in the frequency domain, which effectivelythrows away measured data and, hence, reduces SNR and limits the resolution.A better choice is to use H(t,µ f0) as an observation vector in the frequency do-main for high-resolution TDoA parameter estimation described in Section 13.6.H(t,µ f0) represents the sum-of-exponentials model describing the delay spec-trum. A second frequency-domain dimension can be constructed from time-limited sections of the observed sequence H(t,µ f0) with the sum of exponentialsin t describing the Doppler spectrum. The two-dimensional Fourier transformapproximates the joint delay-Doppler frequency response. A single-input single-output (SISO) sounder just relies on this principle.
A MIMO channel sounder measures the channel response matrix betweenall MTx antennas at the transmit side and all MRx antennas at the receiver side.This could be carried out by applying a parallel multiple-channel transmitter andreceiver. However, truely parallel systems are not only extremely expensive, theyare also inflexible (when considering changing the number of antenna channels)and susceptible to phase drift errors. Also a parallel operation of the transmitterchannels would cause specific problems since the MTx transmitted signals haveto be separated at the receiver. An alternative sounder architecture is based onswitched antenna access. A switched antenna sounder contains only one physical

252 Multidimensional high-resolution channel sounding measurement
ts = τmax2MTxMRx = total snapshot time duration
tp = Tx signal period = τmax = maximum path excess delayTime
4321321Tx
Rx
Ch
ann
elTx
Tx switching sequence
MTx
Rx
Rx switching sequence
MRx
Figure 13.5. MIMO sounder switching time frame.
transmitter and receiver channel. Only the antennas and the switching channelsare parallel. This reduces the sensitivity to channel imbalance.
Figure 13.5 shows the switching time frame of a sequential MIMO sounderusing antenna arrays at both sides of the link [13]. Any rectangular block in thefigure represents one period of the transmit/receive signal. Synchronous switchingat the Rx and Tx is required in order to clearly assign the received signal peri-ods to any input-output combination of the channel matrix. Timing and switch-ing frame synchronization is established during an initial synchronization processprior to measurement data recording and must be maintained over the completemeasurement time even in the case of a remote operation of Tx and Rx. This isaccomplished by rubidium reference oscillators at both Rx and Tx. The total snap-shot time length is now given by ts = 2τmaxMTxMRx, where MTx and MRx are thenumber of antennas at the Tx and the Rx sites, respectively. The factor of twocomes from the one blank period, which is inserted at the receiver after every pe-riod acting as a guard interval to avoid switching transients. Similar to OFDM, thisCIR estimation principle relies on a periodic signal model for excitation and re-ception. Therefore, the guard interval has to cope with the channel and the deviceresponse. For some signal processing operations based upon the recorded data, itmay be a disadvantage that the antenna channels are not sampled at strictly thesame time instant. If the maximum Doppler bandwidth for real-time sounding isless than 1/ts, the antenna channels can be individually interpolated resulting inMIMO channel responses with aligned sampling time for all channels.
Further considerations concerning the hardware operation of the sounder sys-tem refer to the Tx/Rx synchronization in the remote operation mode and to cali-bration, transmit power, and link budget issues. Only a short overview of the mostimportant topics will be given here.
The remote operation means that there is no synchronization link appliedbetween Tx and Rx. Initial synchronization is accomplished by a back-to-back cal-ibration procedure. Hereby the overall device frequency response is measured andstored for equalization purposes. Also the frequency references are synchronized.

Reiner S. Thoma et al. 253
The synchronization has to be maintained throughout the whole measurement cy-cle. Separate rubidium reference sources at both Tx and Rx are required and the lo-cal oscillator (LO) signals have to be generated at both sides. This makes a sounderfundamentally different from a standard network analyzer and asks for specificconsiderations. For DoA/DoD estimation a full coherent operation is necessaryduring the snapshot period ts. If Doppler estimation is aimed at or if a sequenceof snapshots is to be averaged for SNR enhancement, the coherent operation pe-riod must extend to multiples of ts. This sets the limits for phase noise parts hav-ing a coherence time below this time interval. However, the time period betweentwo calibration measurements may easily take some hours if field measurementsare considered. In this case some drift of the references cannot be avoided evenif rubidium sources are used. This can normally be accepted as long as the ref-erence offset is markedly smaller than the specified Doppler bandwidth. A smallreference-frequency offset would be measured as a respective Doppler shift. Notethat in case of synthetic antenna aperture measurements and for antenna arraycalibration a much longer coherent operation period will be necessary, which mayrequire a direct Tx/Rx synchronization by cable.
Calibration has to include the absolute device power gain as well. This is alsoachieved throughout the back-to-back calibration when operating the transmitterwith its nominal output power to a reference attenuator. Nevertheless, antenna-independent path loss estimation is however only possible if the antennas arecalibrated with respect to absolute gain and if the DoA/DoDs of the polarimetricwave components at the antennas are known. This means that both the DoA andDoD have to be estimated. Otherwise, the antenna influence cannot be separatedfrom the measurements and the path attenuation can only be given including theinfluence of the specific antennas used throughout the measurement.
Further issues are related to automatic gain control (AGC). AGC at the re-ceiver has to ensure maximum signal level throughout the receiver chain from theantenna to the ADC input. At the same time it has to avoid overloading. The re-ceiver should have a switched AGC in well-defined calibrated steps which shouldcover at least a range of 50–60 dB. The AGC setting has to be implemented on ba-sis of instantaneous peak value estimation. To avoid uncontrolled transients, theAGC timing control must be synchronized to the MIMO switching time frame de-scribed in Figure 13.5. For very accurate angle-of-arrival estimation, the same AGCsetting should be used for all antennas of the arrays. The best results are achievedif the complex frequency responses of all AGC steps are individually calibrated(including the complex frequency response which may vary because of changingelectrical length).
Regarding the arrangement of antenna switches and amplifiers there is al-ways a tradeoff in sensitivity and phase stability. Individual low-noise amplifiers(LNA) at Rx antennas and/or individual power amplifiers (PA) at the Tx are mostlyinadequate because of the increase in phase drift between antenna channels. How-ever, if there is only a single PA at the Tx, the corresponding antenna switch has tohandle the full output power which may exceed 2–10 W for broadband bad urbanmeasurements. At the Rx, the switch attenuation adds to the receiver noise figure.

254 Multidimensional high-resolution channel sounding measurement
Future steps in real-time MIMO sounding will include usage of multiplesounding transmitters and/or receivers to emulate system-specific scenarios andinterference situations. Two transmitters and one receiver, for example, can beoperated in a coordinated way whereby the transmitters are switched on/off in astaggered temporal sequence. This allows quasi-simultaneous measurement of twospatially distributed links. These links can represent a multiuser scenario as seenfrom a base station. Also two base stations can be emulated to represent soft han-dover scenarios and a cooperative downlink operation from spatially distributedaccess points. Moreover, a dual-hop link as a part of a multihop or ad hoc networkor just a relay extension can be investigated. Future sounder RF interfaces will beable to handle dual-band up and down converters to emulate tandem air interfaceswhich will operate in completely different frequency bands. For an ultra-wideband(UWB) operation, sounders will be developed, having a real-time bandwidth ofsome GHz, for example, from 3 to 11 GHz. The hardware of these sounders willbe extremely demanding and requires integrated SiGe technology [12]. This re-lates also to very broadband sounding at mm-wave frequencies, for example, at60 GHz. To achieve enough spatial resolution for indoor scenarios, the bandwidthhas to be enhanced up to some GHz. The very high frequency will put extreme de-mands on phase noise if DoA/DoD has to be estimated. A UWB operation, how-ever, will shift the angle resolution paradigm from phase difference estimation totime-delay estimation which allows wider antenna distances and, thus, compen-sates loss in accuracy because of phasa noise..
13.4. Antenna array architecture
The spatial dimension of the channel response is accessed by antenna arrays. Thismainly relates to “true” arrays but can also include synthetic aperture arrays. Thosearrays consist of a sequentially sampled spatial aperture where only one antenna(or a subset) of the respective array is physically deployed. The angular resolutioncapability of any array depends on the effective aperture size as seen from the re-spective wave direction. So the spatial arrangement of the antenna elements has amajor influence.
A sophisticated antenna architecture design is required to achieve highDoD/DoA resolution. This has to go along with mechanically and electrically sta-ble construction and precise calibration. Since there is always a tradeoff betweenvarious specifications including resolution, measurement time, availability, andcosts, there is a wide variety of useful antenna array architectures. In the sequel,we summarize some design considerations.
(i) Planar antenna arrays such as uniform linear arrays (ULA) or uniformrectangular arrays (URA) always have a limited viewing angle and inherent for-ward/backward ambiguity. They are useful to represent a base station’s (BS) viewto the channel. Moreover, there is a nonlinear transformation from the geometrical
DoA/DoD to the respective normalized structural parameters µ(i)k . Consequently,
the effective array aperture depends on the DoA/DoD and the resolution capabilityis not uniform. Circular antenna arrays, on the other hand, have a full field of view.

Reiner S. Thoma et al. 255
They can be used to represent the mobile station (MS). Their angular resolutioncapability is uniform.
(ii) Double-directional estimation requires arrays at both sides of the link andMIMO operation of the sounder. For cellular system consideration, a combinationof planar and circular arrays is adequate, whereas for ad hoc peer-to-peer networksidentical circular arrays are most preferable.
(iii) Mainly for microcell and picocell scenarios, estimation of the elevation isaspired in addition to the azimuth. This requires application of uniform rectan-gular, cylindrical, or spherical arrays. However, three-dimensional wave analysis(which includes azimuth and elevation) is not only necessary to deduce three-dimensional propagation models. It is also required for the removal of the influ-ence of the complex beam pattern of the measurement antennas from the data by asuitable calibration procedure if there are incoming waves with nonzero elevation.Moreover, this must also include polarization resolution.
(iv) Spherical antenna arrays may be applied for full azimuth and elevationcoverage. However, there exists no geometric solution to arrange more than 20patch antenna elements on a spherical surface with identical interelement distan-ces. Therefore, nonuniform interelement distances and various relative polariza-tion orientations of adjacent elements will complicate the design of spherical ar-rays. Moreover, optimization of the interelement distance for circular and spheri-cal arrays (or of the array diameter in case of a fixed number of antenna elements,resp.) is required to minimize the sidelobes of the angular correlation function toreduce the probability of outliers in the iterative parameters search. This typicallyleads to interelement distances, something smaller than half of the wavelength.
(v) Full polarimetric analysis of the radio channel requires not only polari-metric reception but also polarimetric excitation of the channel. This is even truefor omnidirectional excitation where we need a two-port antenna which launchesboth orthogonal polarized waves with omnidirectional characteristics and, thus,doubles the required sounder output ports.
(vi) High and reliable resolution in terms of separation capability of closelyspaced paths and low probability of outliers requires an antenna architecture whichoffers a minimum of antenna array aperture size in the respective spatial dimen-sion, including a minimum number of antenna elements, low antenna elementcoupling, and precise calibration. This has also to include the antenna switchesand feeder cables.
(vii) The characteristics of the antenna elements depend on the basic elementdesign (dipoles, patches, slots, etc.). It has a strong influence on high-resolutionperformance, estimation ambiguities, probability of outliers and polarization res-olution capability, gain, bandwidth, and so forth. For example, the directivity ofthe antenna elements is a means to mitigate the inherent forward/backward ambi-guity of ULA and URA.
(viii) For the later relation of recorded data to the respective propagationscenario, video cameras should be included into the antenna module. The opti-cal viewing field of the cameras should correspond to the electromagnetic view-ing field of the antennas. Also GPS position recording, electronic compass, and

256 Multidimensional high-resolution channel sounding measurement
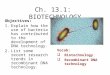
Figure 13.6. Uniform rectangular patch array (URA 8 × 8) [9, 15].
(a) (b)
Figure 13.7. (a) Circular dipole array (UCA32) and (b) stacked polarimetric uniform circular patcharray (SPUCPA 4 × 24) [9, 15].
inclination sensors help to precisely document the measurement setup. Further-more, a laser pointer should be mounted at the array to support angular adjust-ment.
The following figures show examples of high-resolution antennas. The URAin Figure 13.6 comprises 8 × 8 vertical polarized patch elements. Three peripheraldummy rows and columns are included to mitigate the fringing field effect, whichdistorts the beam patterns. The module also includes a 64 × 1 switch, LNA, andfilter. It can be used for joint azimuth and elevation estimation within bore sideviewing sector of 120 and 60, respectively. The uniform circular array (UCA) inFigure 13.7a consists of 32 sleeve antennas, which do not require a ground plane.Here, a 2 W power switch is included to support the application as a transmit an-tenna. The usage is essentially restricted to azimuth estimation only since there isno vertical aperture available for low-elevation paths (which are most importantfor mobile radio application). The stacked polarimetric uniform circular path ar-ray (SPUCPA) in Figure 13.7b is a very sophisticated array. It comprises 4 stackedrings of 24 polarimetric patches. So it has 192 output ports in total. The switchis arranged inside of the cylindrical body of the array. This architecture gives amaximum resolution in azimuth for low-elevation paths and good resolution inelevation within ±30.

Reiner S. Thoma et al. 257
13.5. Resolution limits and antenna array calibration
In (13.3), we have introduced the measurement system response. In this sectionwe will concentrate on the part which results from the antenna arrays. The an-tenna response is described by the complex polarimetric beam patterns b(Ωk)of all elements, which result from vertical and horizontal polarized excitation. Inan early design step, these beam patterns can be calculated from electromagneticfield simulation. Once the array is realized, the response has to be measured ina well defined propagation environment which should be an anechoic chamber.Recording the complete spherical beam pattern requires precise rotation of the ar-ray around a suitable defined pivot point located in the phase reference center ofthe array and excellent phase stability of the setup throughout the measurementcycle, which can take some hours. The measured beam patterns are discrete inazimuth ϕ = (−π · · ·∆ϕ · · ·π − ∆ϕ) and elevation ϑ = (0 · · ·∆ϑ · · ·π). Dueto the periodicity of the beam patterns in 2π the DFT transforms b(ϕ, ϑ) to theEADF domain g( f1, f2) without any leakage error. This is at least true for the az-imuth. For the elevation special considerations are necessary since the elevationcan hardly be measured over the full angular period of 2π due to practical me-chanical reasons. Moreover, the spherical Fourier transform has some numericalproblems near the poles of the sphere. The beam pattern b(ϕ, ϑ,m) of the antenna
m is stored in the matrix B[N1×N2]pm (the superscript denotes the dimension of the
matrix). The EADF matrix is calculated by a two-dimensional Fourier transformby applying the Fourier matrices F1/2:
G[Na1×Na2]m = 1√
N1 ·N2FNa1×N1
1 · Bpm · FN2×Na22 . (13.7)
The advantage of the EADF concept is threefold. (i) It allows a considerabledata compression since it is distinguished by a limited support area as shown inFigure 13.8b. This is a direct consequence of the physical meaning of the antennaaperture. (ii) It provides a means to calculate the complex array response for arbi-trary angles. (iii) It allows a simple analytic calculation of the beam pattern deriva-tives with respect to the angular parameters. This is used for the ML parameterestimation as described in Section 13.6. In this section it is used to define the fun-damental limit of the achievable variance of the estimated DoA/DoD parametersin terms of the Cramer-Rao lower bound (CRLB). The matrix of the first-orderderivatives of the K path parameters is given by the Jacobian matrix
D(Θ) = ∂s(Θ)
∂ΘT
[∂s(Θ)∂Θ1
· · · ∂s(Θ)∂ΘK
]. (13.8)
With this result the Fisher information matrix (FIM) can be expressed in the form
J(Θ) = 2 · Re
D(Θ)H · R−1nn · D(Θ)
, (13.9)

258 Multidimensional high-resolution channel sounding measurement
VV
VH
0
5
10
15
20
25
Gai
n(d
B)
(a)
Na2
Na1
−20 −10 0 10 20
µ2
−20−15−10
−505
101520
µ1
(b)
Figure 13.8. (a) Polarimetric beam pattern (ϕ) for azimuthal (ϕ) and elevation (ϑ) excitation and (b)corresponding EADF ϕϕ for one element of the SPUCPA in Figure 13.7.
whereby Rnn = En · nH = σ2 · I is the noise covariance matrix. The diagonalelements of the inverse FIM represent the CRLB of the K parameters estimates,that is,
CRLB(Θ) = J−1(Θ). (13.10)
The nondiagonal elements of the inverse FIM denote the mutual informationbetween two parameters. If nondiagonal elements are zero, the respective param-eter estimates are uncoupled or independent. In general, the data model is opti-mally parameterized if the FIM is diagonal. The investigation and exploitation ofthe FIM structure is essential to design a robust and efficient parameter estimator.
The FIM is also diagonal in case of the single impinging path scenario, whichis analyzed in the following example. It is again related to the SPUCPA in Figure13.7b. In Figure 13.9 the CRLB of the azimuth angle is compared to the vari-ance which is achieved by an experiment. For any true azimuth/elevation pair ϕ,ϑ within the coverage sector of the SPUCPA the azimuth was estimated by an MLprocedure. This experiment was repeated 64 times. The noise level for CRLB cal-culation was adjusted to match the observed device noise level, which was heldconstant according to an SNR in the main beam direction (ϑ = 90) of 17–18 dB.
The result drastically changes in case of a coherent two-path scenario. Twopaths are said to be coherent if their weights have an almost constant phase differ-ence during the available observation window. Then the FIM predicts a strong de-pendency between the resulting estimates especially when the two paths are closelyseparated in the angular domain (closer than the Rayleigh resolution of the array).This can easily be explained by the field pattern, which results from the super-position of the two waves. There occur stationary spatial regions of constructiveand destructive interference, which eventually causes a more or less ill-posed pa-rameter estimation problem. It can be observed that the resulting degradation de-pends on the phase difference between the two path weights. In the test scenario

Reiner S. Thoma et al. 259
1000−100
Azimuth (deg)40
80120
Elevation (deg)
2468
1012×10−3
CR
LB
(deg
2)
(a)
1000−100
Azimuth (deg)40
80120
Elevation (deg)
2468
1012×10−3
CR
LB
(deg
2)
(b)
Figure 13.9. (a) CRLB and (b) estimated variance of estimated azimuth DoA versus the true azimuthand elevation direction range.
−1 −0.5 0 0.5 1
Tx position (λ)
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
CR
LB
(deg
2)
Figure 13.10. CRLB of the of estimated azimuth DoA in a coherent two-path scenario versus relativeTx positions.
two paths where emulated by two Tx antennas located in the horizontal plane(ϑ = 90) and at the same distance to the SPUCPA. The angular separation in az-imuth and elevation was 5, which results in a spatial field pattern period that is byfar larger than the active SPUCPA aperture size. One transmit antenna was movedstep by step forward and backward along the line-of-sight direction in the range oftwo wavelengths (−λ · · · λ), thus introducing a specific phase difference betweenboth paths.
Figure 13.10 shows the resulting CRLB in the horizontal plane. The differentcurves correspond to certain true Tx bearing angles in azimuth. There are clearlyindicated distinct maxima for certain relative Tx positions which differ by halfa wavelength. This goes along with a change in the resulting field pattern fromminimum to maximum. It becomes also obvious that the array does not behaveuniformly in azimuth. The reason may be the influence of the tree-like structureof the antenna switches that may result in a slight variation of the SNR over thewhole azimuth range.

260 Multidimensional high-resolution channel sounding measurement
13.6. Maximum likelihood parameter estimation
Various algorithms have been proposed for high-resolution multidimensional pa-rameter estimation in channel sounding including the multidimensional unitaryestimation of signal parameters via rotational invariance techniques (ESPRIT) al-gorithm [16], and an application of the space-alternating generalized-expectationmaximization (SAGE) method [17], which is essentially an expectation-maximiza-tion-(EM-) based simplified maximum likelihood (ML) parameter estimationprocedure [18]. The algorithm proposed in [17] can also be understood as an ap-plication of the alternating projection algorithm [19], since the multidimensionalsearch is broken down into sequential one-dimensional coordinate-wise searches.Both classes of the algorithm are subjected to different model assumptions andunderlying conceptual restrictions including applicability to certain antenna arrayarchitectures, calculation time in terms of convergence speed and statistical effi-ciency. It is well known that ESPRIT is an unbiased DoA/DoD estimator only if theantenna arrays used for the measurements show the so-called shift-invariant struc-ture. This is the case for uniform linear and planar arrays (ULA, URA) and circularuniform beam arrays (CUBA) [16]. For other usual antenna array architectures in-cluding uniform circular arrays (UCA), and uniform circular patch arrays (UCPA)or the respective spherical arrays, ESPRIT application to DoA/DoD estimation isnot possible or will at least result in biased estimates. Other drawbacks may ariseif we ask for a statistically efficient estimator and/or for the parameter estima-tion in a more complicated context such as colored measurement noise, nonidealantenna array characteristics, and so forth. Maximum likelihood parameter esti-mation procedures are in general more flexible to cope with these requirements.For example, the SAGE approach has been applied for a large variety of antennaarray architectures. The drawback is its inefficiency and slow convergence rate ifclosely spaced coherent propagation paths exist in the multipath propagation sce-nario. Clearly, since we have only one transmitting source, all received paths haveto be considered as coherent. This may result in a strong coupling of estimationresults (as indicated in the FIM structure). In this case, a gradient-based multi-dimensional ML channel parameter estimation framework outperforms indepen-dent parameter search strategies such as SAGE [7].
With the stationary measurement noise n and the dense multipath and specu-lar components d and s, respectively, the total observed signal vector x is modeledas follows:
x = n + d(Θdds
)+
K∑k=1
s(Θk
) = nd(Θdds
)+ s
(Θsp
)(13.11)
having a conditional probability density of
pdf(
x|Θsp,Θdds) = 1
πM det(
R(Θdds
))e−(x−s(Θdds))HR(Θdds)−1·(x−s(Θsp)). (13.12)

Reiner S. Thoma et al. 261
The related log-likelihood function is
L(
x;Θsp,Θdds) = −M · ln(π) − ln
(det
(R(Θdds
)))− (
x − s(Θdds
))H · R(Θdds
)−1 · (x − s(Θsp
)).
(13.13)
Because of the Gaussian nature of the probability density, the maximizationof (13.13) with respect to Θsp is essentially a nonlinear weighted least squaresproblem. Since an exhaustive search in the multidimensional parameter space isnot feasible, we are proposing an iterative search framework which is based onboth gradient methods and sequential parameter update. This procedure proceedssnapshot by snapshot and takes advantage as much as possible of typical channelbehavior that is known a priori from propagation physics and from experimentalexperience. So the estimated parameter set of every snapshot is taken as the ini-tial estimate for the next one. This is of specific importance for the Θdds vectorsince the statistic parameters of the dense multipath change only slowly as long asthe “average environment” does not change completely. The K parameter vectorsΘk, on the other hand, change much faster since they directly comprise geometricparameters. Moreover, existing paths can temporarily be shadowed or definitelydisappear and new paths can suddenly show up. Therefore, we can take advan-tage of tracking existing paths. However, at the same time we have to search fornew paths. This way the model order K is adaptively controlled throughout thesequence of snapshots. A considerable simplification of the search procedure maybe possible according to the expectation-maximization (EM) principle if the pa-rameters are independent in their influence. Since the parameter sets Θsp and Θdds
are obviously independent, we can use alternating search procedures to maximize(13.13) with respect to Θsp and Θdds. This way we successively remove the esti-mated deterministic specular paths from the observed data. For estimation of theparameters Θdds, a Gauss-Newton algorithm is applied. This gives us also a para-metric representation of the covariance matrix R(Θdds). The knowledge of R(Θdds)is essential also for the estimation of specular parameters Θsp since it provides ap-propriate weighting of the observed data according to the nonlinear weighted leastsquares problem:
Θsp = arg minΘsp
(x − s
(Θsp
))H · R(Θdds
)−1 · (x − s(Θsp
)). (13.14)
The global search for new paths (which has to be carried not only at the be-ginning of the sequence but continuously step by step) is carried out by a modifiedSAGE procedure. Rather than a random assumption for unknown parameters, weuse some kind of noncoherent combining of independent observations to reducethe parameter dimension. To explain the strategy, we discuss an example. Supposethe channel impulse response has been measured using a 10-element ULA at onelink end. At first, we treat the 10 individual channel impulse responses as inde-pendent realizations of the same process and maximize the log-likelihood func-tion with respect to the time delay. A noncoherent combining procedure avoids

262 Multidimensional high-resolution channel sounding measurement
any assumption on unknown DoA in this step. In the next step, we keep the esti-mated time delay fixed and maximize (13.14) with respect to DoA. This reducesthe maximization problem to two concatenated one-dimensional problems. Anyarbitrary assumption of the DoA in the example would implicitly realize coher-ent combining which potentially disregards paths impinging from other angles bybeamforming. This kind of noncoherent handling of data dimensions related tounknown parameters (e.g., DoA) gives us a higher probability to detect the rele-vant parameters which is the time delay in the example.
The problem of local search is completely different. We found that for closelyspaced coherent paths the coordinate-wise search strategy has serious disadvan-tages because of its slow convergence rate which is not only time consuming butmay also end in erroneous estimates when using a quantized parameter database[7]. This problem is related to the strong coupling of the respective parameter esti-mates as indicated in the FIM. Since it is well known that the ML function is, undermild restrictions, quadratic at its maximum (in the local “attractor area”), a con-jugate gradient search promises much better convergence performance when theparameters are coupled in their influence to the minimization of (13.13). Fromthe variety of available procedures for nonlinear optimization, we are using theLevenberg-Marquardt algorithm because of its robustness. To calculate the opti-mum step size and direction for parameter change these algorithms require thegradient, the Jacobian matrix, and the Hessian matrix of the log-likelihood func-tion at the actual point in the parameter space. Fortunately enough, with the al-gebraic data model based on (13.3) the derivatives are easily available. This is es-pecially true for the EADF model of the antenna arrays. The approximation ofthe Hessian as it is used in the Gauss-Newton/Levenberg-Marquardt algorithm isessentially an estimate of the Fisher information matrix (FIM). This provides uswith the required information on both the variance and on the mutual dependencyof the parameter estimates.
The following examples demonstrate the performance of the RIMAX algo-rithm which is an efficient implementation of the proposed ML parameter estima-tion framework [7, 8, 20]. The simulation results in Figures 13.11 and 13.12 com-pare the convergence behavior of the gradient-based ML search to the parameter-wise search of the SAGE in a noise-free, closely spaced coherent path scenario. Inthis case, the paths differ only in DoA and are separated by 5 in angle of arrivalwhich is closer than the Rayleigh resolution of the array. The path magnitudesare equal and the phase difference is zero in Figure 13.11 and 180 in Figure 13.12.Although these constellations may be considered as worst-case situations, they fre-quently occur in a practical propagation scenario since path length difference hasto change only by 2.5 cm to move from one worst-case situation to the other. Theantenna array was a 24-element circular patch array. Only matched vertical polar-ization was considered. The two figures depict the iteration steps which are plottedon the cost function surface. Note that both constellations cause completely differ-ent cost function surfaces which are characterized by shaped, narrow valleys. Theparameter-wise search of the SAGE forces very small zigzag steps in the direction ofthe individual parameters which can be seen most clearly in Figure 13.12. In both

Reiner S. Thoma et al. 263
−2 0 2 4 6 8
Source angle 1()
−2.5
−3
−3.5
−4
−4.5
−5
−5.5So
urc
ean
gle
2( )
(a)
−2 0 2 4 6 8
Source angle 1()
−2.5
−3
−3.5
−4
−4.5
−5
−5.5
Sou
rce
angl
e2(
)
(b)
Figure 13.11. Convergence behavior of (a) the SAGE algorithm as compared to (b) the gradient-basedRIMAX algorithm in case of two coherent paths (angular separation 5; 0 phase difference).
−1 0 1 2 3 4 5 6 7 8
Source angle 1()
−3−4−5−6−7−8−9
−10−11−12
Sou
rce
angl
e2(
)
(a)
−1 0 1 2 3 4 5 6 7 8
Source angle 1()
−3−4−5−6−7−8−9
−10−11−12
Sou
rce
angl
e2(
)
(b)
Figure 13.12. Convergence behavior of (a) the SAGE algorithm as compared to (b) the gradient-basedRIMAX algorithm in case of two coherent paths (angular separation 5; 180 phase difference).
cases, final convergence is not even achieved within 2000 iterations of the SAGEprocedure whereas the gradient search needs only 26 and 13 steps, respectively, toreach the solution. Figure 13.12b also indicates the initial SAGE steps before start-ing the final gradient steps. The example shows that quantization of the data modelwould be detrimental since very small steps are required by the SAGE in order toachieve some progress. Moreover, data model quantization is not directly related tothe desired parameter quantization. Actually, much finer steps are often required.Figure 13.13 further compares coordinate-wise (alternating) and gradient-basedoptimization in terms of the number of iterations versus the angular separation oftwo coherent paths. It becomes clear that especially for paths which are closer thanRayleigh resolution (which means that we have to apply high resolution instead ofFourier methods) the number of the required iterations becomes prohibitive.

264 Multidimensional high-resolution channel sounding measurement
SAGEGRAD
5 10 15 20 25 30 35 40 45 50
∆φ (deg)
101
102
103
104
105
Iter
atio
ns
Figure 13.13. Convergence rate of the SAGE algorithm in comparison to a gradient-based ML algo-rithm (GRAD) (number of iterations versus angular separation of two coherent paths).
The example in Figure 13.14 shows the estimation results in the delay domain(power delay profile (PDP)). It was calculated from measured data in a street mi-crocell scenario. The specular path weight magnitudes are indicated by blue dots.The reconstruction of the power delay profile within the measurement bandwidthis given by the blue curve. The green curve is the difference between the recon-structed and the measured power delay profile, thus it is an instantaneous real-ization of the dense multipath scattering components (dds). The expectation ofthe same part (which is estimated from the data) is given by the red triangularcurve. The vertical red lines indicate the relative variances of the specular pathweight estimates as they are calculated from the FIM. Most reliable paths are in-dicated by a variance contribution that directly follows the dense multipath slope.Noise enhancement is indicated by red points above this slope (see, e.g., at 2800nanoseconds). The outliers around 3050 and 3350 nanoseconds are caused by linesplitting, which is characterized by two very closely spaced, excessively strong pathswith opposite signs. Although those paths may very well approximate a small binof a band-limited CIR, there is clear evidence of a wrong estimate since the relativevariance is greater than 1. As a consequence, one of those paths has to be omit-ted. A repeated estimation step will then lead to a more accurate estimate of theremaining path. Line splitting is a typical situation which occurs when the modelis underdetermined. Since the proposed procedure clearly indicates and correctsthis error it can be applied as a part of robust iterative model order controlling.
The described parameter estimation framework is very flexible and can be ex-tended step by step. Further steps include enhanced estimation procedures, a moreaccurate data model and reduced numerical complexity. There are various possi-bilities. For example, the information delivered by the Fisher information matrixcan be used to identify coupled parameter clusters. Then a grouping of param-eters can be applied to restrict the gradient search to the coupled sets of pathparameters. Independent parameters can be more easily estimated by the SAGE

Reiner S. Thoma et al. 265
Reconstructed PDPDense multipath + noiseEstimated dense multipath + noise
220 240 260 280 300 320 340 360
−50
−45
−40
−35
−30
−25
−20
−15
−10
−5
Nor
mal
ized
pow
er(d
B)
Time delay (10 ms)
Figure 13.14. CIR measurement example and parameter estimates.
procedure. A further extension of the procedure should include enhanced param-eter tracking. From a visual inspection of a temporal sequence of CIRs it becomesclear that some paths stay stable over a longer time. They can be more accuratelyestimated if more sophisticated path tracking is applied.
13.7. Measurement-based MIMO system performance evaluation
Initially, channel sounders were only applied to investigate wave propagation phe-nomena. From those results a lot of ideas have evolved for the design of channelmodels and even for the definition of reference models that became part of the ex-isting cellular or WLAN standards. Moreover, quantitative results were achieved toparameterize these models for certain well-defined canonical radio environments.Mostly, standard scenarios were investigated that are related to existing wirelesssystem generations. The large variety of system solutions and deployment scenar-ios of the next generation asks for novel measurement setups. One example is in-dicated in Figure 13.15. It is related to a public access situation in a high-speeduser scenario. The figure describes an access point which serves public road trans-portation. Also car-to-car propagation is indicated. Models and measurement re-sults for these scenarios are still rarely available. Other examples are public accessareas in airport and train stations, factory hall environments, vehicle access in tun-nels, access inside of cars or trains, and so forth. This list could be extended almostarbitrarily since very specific propagation conditions may apply for which stan-dard models and assumptions are not applicable.

266 Multidimensional high-resolution channel sounding measurement
Figure 13.15. High-speed public access scenario.
A further trend is that novel system and network aspects have to be consid-ered. This may include a coordinated downlink operation from multiple base sta-tions, widely distributed multiple antennas, ad hoc, multihop systems and relay ex-tensions, tandem air interfaces, and so forth. For system-specific evaluations mostof all interference scenarios seem to be of interest.
A real-time channel sounder with its huge memory capacity and flexibility inusing various antenna arrays can be considered as a valuable component of a rapidprototyping system when developing these new physical layer and network princi-ples. The recorded channel data can be directly used to simulate the link behaviorunder very realistic propagation situations. Figure 13.16 gives a short glance to thedata handling. The recoded channel matrix with its elements hνµ(l) is adopted inits main dimensions to the required system specification. This perhaps includesbandwidth, delay window, and also the transmitter and receiver filters gT(t) andgR(t). Then the data stream is processed on the waveform or symbol level by fastconvolution. It may be argued that this would result in overoptimized systemsfor the stored scenarios that will fail in many others. However, we believe thatMIMO system performance evaluation requires a balanced mix of a deterministicmodeling approach for a number of representative scenarios and the frequentlyfavored stochastic modeling approaches. Only this allows identifying the relevantfactors influencing the transceiver performance. The recorded data can be usedfor comparing even completely different transceiver architectures with exact re-producibility. The causality of certain performance effects can be traced back tothe instantaneous channel conditions. It has been shown that the amount of therecorded data is enough even to simulate bit loading procedures, adaptive mod-ulation, and incremental coding strategies at the transmitter, which are implicitlycontrolled by specific ARQ schemes [21].
It has already been stressed that the antenna configuration is of exceptionalrelevance for MIMO systems. The described method of direct use of recordeddata for transceiver simulations lacks the flexibility to incorporate arbitrary an-tenna properties after the measurements have been completed. When arrays witha large number of antenna elements are used (which may be the case when high-resolution DoA/DoD estimation is considered), then there is still a great deal of

Reiner S. Thoma et al. 267
DataT
xpr
oces
sin
g
gT (t)
...
gT (t)
Tx
ante
nn
as
1
N
· · ·
· · ·
h11(l)...
hM1(l)
h1N (l)...
hMN (l)
Link adaptation
ν1(k)
νM(k)
Rx
ante
nn
as
1
M
gR(t)
...
gR(t)
Rx
proc
essi
ng
Data
. . .
. . .
Figure 13.16. System model for MIMO transmission.
flexibility for simulations when we use different subsets of the antennas. This givesus also the chance to interpret and compare the MIMO link simulation results(e.g., in terms of bit error rates) to the DoA/DoD propagation structure of thechannel. In any case, the individual antenna element characteristics of the mea-surement array are considered to be part of the channel.
An extended approach has been described in [4]. It is called measurement-based parametric channel modeling (MBPCM). It relies on the parameter estima-tion procedure described in the previous section. This method also belongs to thecategory of deterministic channel models since it takes the geometrical informa-tion on the propagation scenario from the measurement. It is essentially a two-step procedure with a parameter estimation step and a follow-up synthesis step.The parameter estimation, if properly carried out, gives an antenna-independentchannel model (within well-defined limits which are determined by the measure-ment antennas used). The synthesis step gives us the flexibility to include a varietyof antenna array architectures into the simulation and allows statistical simulationin terms of fast fading.
13.8. Conclusion
Multidimensional channel sounding for MIMO propagation analysis requireshighly sophistic antenna design, calibration, and high-resolution parameter es-timation. We proposed an ML channel parameter estimation framework whichcomprises estimation of the multidimensional specular paths parameters and ofthe delay distribution of dense multipath contributions which clearly outperformsexisting procedures in terms of applicability, flexibility, robustness, and conver-gence. The estimator provides additional reliability information of the estimatedparameters and uses a novel general antenna array model, the so-called EADF. Fur-ther enhancements may include enhanced path tracking and directional, respec-tively, spatial modeling of dense multipath components. High-resolution multi-dimensional channel parameter estimation is prerequisite to create antenna-inde-pendent channel models. Real-time MIMO channel sounding results can be usedto obtain realistic link-level performances of transceiver algorithms. However, a

268 Multidimensional high-resolution channel sounding measurement
high amount of measurements will still be required to cover the variety of relevantdeployment and system scenarios of future mobile radio networks.
Abbreviations
AGC Automatic gain control
AP Access point
BS Base station
CIR Channel impulse response
CRLB Cramer-Rao lower bound
CUBA Circular uniform beam arrays
DFT Discrete Fourier transform
DoA Direction of arrival
DoD Direction of departure
EADF Effective antenna aperture distribution function
ESPRIT Estimation of signal parameters via rotational invariance techniques
FDD Frequency division duplex
FIM Fisher information matrix
FFT Fast Fourier transform
GPS Global positioning satellite
LNA Low-noise amplifiers
LO Local oscillator
LOS Line of sight
MBPCM Measurement-based parametric channel modeling
MC-SSS Multicarrier spread spectrum signal
MIMO Multiple-input multiple-output
PDP Power delay profile
ML Maximum likelihood
MS Mobile station
OFDM Orthogonal frequency division modulation
PA Power amplifier
PRBS Periodic pseudorandom binary signals
RMS Root mean square
Rx Receiver
SAGE Space-alternating generalized expectation-maximization
SISO Single-input single-output
SNR Signal to noise ratio
TDoA Time delay of arrival
Tx Transmitter
UCA Utility communications architecture
UCPA Uniform circular patch arrays
ULA Uniform linear arrays
URA Uniform rectangular arrays
UTRA FDD UMTS terrestrial radio access frequency division duplex
UWB Ultra-wideband
WLAN Wireless local area network

Reiner S. Thoma et al. 269
Bibliography
[1] G. J. Foschini and M. J. Gans, “On limits of wireless personal communications in a fading en-vironment when using multiple antennas,” Wireless Personal Communications, vol. 6, no. 3, pp.311–335, 1998.
[2] A. F. Molisch, “A generic model for MIMO wireless propagation channels in macro- and micro-cells,” IEEE Trans. Signal Processing, vol. 52, no. 1, pp. 61–71, 2004.
[3] M. Steinbauer, A. F. Molisch, and E. Bonek, “The double-directional radio channel,” IEEE Anten-nas Propagat. Mag., vol. 43, no. 4, pp. 51–63, 2001.
[4] R. Thoma, D. Hampicke, M. Landmann, A. Richter, and S. Sommerkorn, “Measurement-basedparametric channel modelling (MBPCM),” in Proc. International Conference on Electromagneticsin Advanced Applications (ICEAA ’03), pp. 779–782, Torino, Italy, September 2003.
[5] R. Vaughan and J. Bach Andersen, Channels, Propagation and Antennas for Mobile Communi-cations, vol. 50 of Electromagnetic Waves Book Series, Institution of Electrical Engineers (IEE),London, UK, 2003.
[6] V. Degli-Esposti, D. Guiducci, A. de’Marsi, P. Azzi, and F. Fuschini, “An advanced field predictionmodel including diffuse scattering,” IEEE Trans. Antennas Propagat., vol. 52, no. 7, pp. 1717–1728,2004.
[7] A. Richter, M. Landmann, and R. S. Thoma, “A gradient based method for maximum likelihoodchannel parameter estimation from multidimensional channel sounding measurement,” in Proc.27th URSI General Assembly, Maastricht, Netherlands, August 2002.
[8] R. Thoma, M. Landmann, and A. Richter, “RIMAX—a maximum likelihood framework for pa-rameter estimation in multidimensional channel sounding,” in 2004 International Symposium onAntennas and Propagation, pp. 53–56, Sendai, Japan, August 2004.
[9] www.channelsounder.de.
[10] R. S. Thoma, D. Hampicke, A. Richter, G. Sommerkorn, and U. Trautwein, “MIMO vector chan-nel sounder measurement for smart antenna system evaluation,” European Trans. Telecommuni-cations, vol. 12, no. 5, pp. 427–438, 2001.
[11] A. Richter, C. Schneider, M. Landmann, and R. Thoma, “Parameter estimation results of specularand dense multi-path components in micro- and macro-cell scenarios,” in Proc. 7th InternationalSymposium on Wireless Personal Multimedia Communication (WPMC ’04), pp. V2–90–94, AbanoTerme, Italy, September 2004.
[12] R. Zetik, R. Thoma, and J. Sachs, “Ultra-wideband real-time channel sounder and directionalchannel parameter estimation,” in Proc. International Symposium on Electromagnetic Theory(URSI ’04), pp. 709–711, Pisa, Italy, May 2004.
[13] J. D. Parsons, The Mobile Radio Propagation Channel, John Wiley & Sons, New York, NY, USA,2000.
[14] R. Pintelon and J. Schoukens, System Identification: A Frequency Domain Approach, Wiley-IEEEPress, Piscataway, NJ, USA, 2001.
[15] www.irk-dresden.de.
[16] M. Haardt, R. S. Thoma, and A. Richter, “Multidimensional high-resolution parameter estima-tion with applications to channel sounding,” in High-Resolution and Robust Signal Processing,Y. Hua, A. Gershman, and Q. Chen, Eds., pp. 255–338, Marcel Dekker, New York, NY, USA,2003.
[17] B. H. Fleury, M. Tschudin, R. Heddergott, D. Dahlhaus, and K. Ingeman Pedersen, “Channelparameter estimation in mobile radio environments using the SAGE algorithm,” IEEE J. Select.Areas Commun., vol. 17, no. 3, pp. 434–450, 1999.
[18] J. A. Fessler and A. O. Hero, “Space-alternating generalized expectation-maximization algorithm,”IEEE Trans. Signal Processing, vol. 42, no. 10, pp. 2664–2677, 1994.
[19] I. Ziskind and M. Wax, “Maximum likelihood localization of multiple sources by alternatingprojection,” IEEE Trans. Acoustics, Speech, Signal Processing, vol. 36, no. 10, pp. 1553–1560,1988.

270 Multidimensional high-resolution channel sounding measurement
[20] A. Richter, M. Landmann, and R. S. Thoma, “Maximum likelihood channel parameter estima-tion from multidimensional channel sounding measurements,” in Proc. 57th IEEE SemiannualTechnology Conference (VTC ’03), vol. 2, pp. 1056–1060, Jeju, Korea, April 2003.
[21] C. Schneider, M. Großmann, K. Kansanen, T. Matsumoto, and R. Thoma, “Measurement basedthroughput performance evaluation of antenna variable modulation for broadband turbo MIMOtransmission,” in Proc. 7th International Symposium on Wireless Personal Multimedia Communi-cation (WPMC ’04), pp. V2–85–89, Abano Terme, Italy, September 2004.
[22] U. Trautwein, T. Matsumoto, C. Schneider, and R. Thoma, “Exploring the performance of turboMIMO equalization in real field scenarios,” in Proc. 5th International Symposium on Wireless Per-sonal Multimedia Communications (WPMC ’02), vol. 2, pp. 422–426, Honolulu, Hawaii, October2002.
Reiner S. Thoma: Department of Electrical Engineering and Information Technology, TechnicalUniversity Ilmenau, 98684 Ilmenau, Germany
Email: [email protected]
Markus Landmann: Department of Electrical Engineering and Information Technology, TechnicalUniversity Ilmenau, 98684 Ilmenau, Germany
Email: [email protected]
Andreas Richter: Signal Processing Laboratory, Helsinki University of Technology, FI-02015 HUT,Finland
Email: [email protected]
Uwe Trautwein: Technisch-Wissenschaftliche Software aus Ilmenau (TeWiSoft GmbH), 98693 Ilmenau,Ehrenbergstr. 11, Germany
Email: [email protected]