Embed Size (px)
Citation preview
Mestrado Integrado em Engenharia Electrotécnica e de Computadores
Market Survey ACM1 – Instrumentação de Tanque
equipa: overFlow Sistemas de Engenharia – Automação e Instrumentação
André dos Santos Oliveira
Bernardo Miguel Carvalho Silva Bruno Miguel Fernandes Augusto
Diana Marina de Sousa Neves Fátima Cristina Oliveira Airosa
Filipe dos Santos Teixeira Flávio Jorge Rodrigues de Amorim
Henrique Luís dos Santos Pinto Miguel Freire Pimentel Morais
Rui Miguel Jordão Xavier
Outubro de 2014 Versão 1.6
Market Survey Equipa F - 2014/2015
2
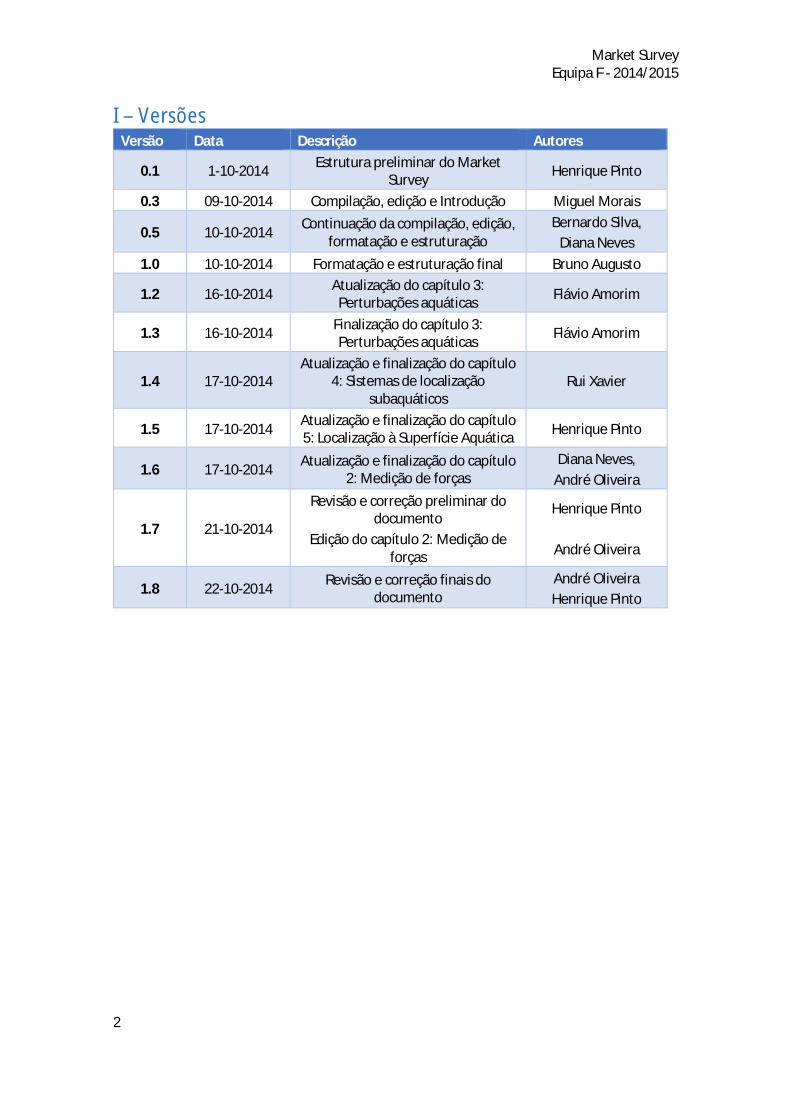
I – Versões Versão Data Descrição Autores
0.1 1-10-2014 Estrutura preliminar do Market Survey Henrique Pinto
0.3 09-10-2014 Compilação, edição e Introdução Miguel Morais
0.5 10-10-2014 Continuação da compilação, edição, formatação e estruturação
Bernardo Silva, Diana Neves
1.0 10-10-2014 Formatação e estruturação final Bruno Augusto
1.2 16-10-2014 Atualização do capítulo 3: Perturbações aquáticas Flávio Amorim
1.3 16-10-2014 Finalização do capítulo 3: Perturbações aquáticas Flávio Amorim
1.4 17-10-2014 Atualização e finalização do capítulo
4: Sistemas de localização subaquáticos
Rui Xavier
1.5 17-10-2014 Atualização e finalização do capítulo 5: Localização à Superfície Aquática Henrique Pinto
1.6 17-10-2014 Atualização e finalização do capítulo 2: Medição de forças
Diana Neves, André Oliveira
1.7 21-10-2014
Revisão e correção preliminar do documento
Edição do capítulo 2: Medição de forças
Henrique Pinto
André Oliveira
1.8 22-10-2014 Revisão e correção finais do documento
André Oliveira Henrique Pinto

Market Survey Equipa F - 2014/2015
3
II – Índice I – Versões ................................................................................................................................ 2
II – Índice .................................................................................................................................. 3
III – Índice de Figuras ................................................................................................................ 5
IV – Índice de Tabelas ............................................................................................................... 5
V – Índice de Equações.............................................................................................................. 6
VI – Acrónimos e Siglas ............................................................................................................. 6
1. Introdução ............................................................................................................................ 7
1.1 Objetivos ......................................................................................................................... 7
1.2 Metodologia .................................................................................................................... 7
1.3 Estrutura ......................................................................................................................... 7
2. Medição de forças ................................................................................................................. 8
2.1 Introdução ...................................................................................................................... 8
2.2 Solução utilizando um dinamómetro ............................................................................... 8
2.3 Medição de forças à superfície através de uma estrutura metálica que permite a interligação do sensor com o corpo sujeito às forças. ............................................................ 8
2.3.1 Métodos de medição ................................................................................................ 8
2.3.2 Sensores existentes no mercado ............................................................................. 11
2.4 Medição de tubo de Pitot .............................................................................................. 11
2.4.1 Introdução .............................................................................................................. 12
2.4.2 Técnicas de medição ............................................................................................... 12
2.4.3 Sensores existentes ................................................................................................ 12
2.5. Medição de caudal e velocidade da água ...................................................................... 13
2.5.1 Solução mecânica ................................................................................................... 14
2.5.2 Solução acústica ..................................................................................................... 15
2.5.3. Solução baseada em inclinação de um toldo .......................................................... 15
2.5.4 Solução indução Eletromagnética ........................................................................... 16
2.5.5 Medição em canalizações/tubagens ....................................................................... 16
2.6. Observações ................................................................................................................. 17
3. Perturbações aquáticas ....................................................................................................... 18
3.1 Estudo em habitat natural (sistema fechado)................................................................. 18
3.1.1 Towing Tank ........................................................................................................... 18
3.1.2 Cavitation Tunnel .................................................................................................... 18
3.2 Estudo em simulação computacional ............................................................................. 19
3.3 Estudo em fluido equiparável ........................................................................................ 20
3.4 Observações .................................................................................................................. 20
Market Survey Equipa F - 2014/2015
4
4. Sistemas de localização subaquáticos .................................................................................. 21
4.1 Baseado em comunicações óticas .................................................................................. 21
4.2 Baseado em comunicações EM (ondas eletromagnéticas) ............................................. 21
4.2.1 Localização por EM ................................................................................................. 22
4.3 Baseado em comunicações acústicas ............................................................................. 24
4.3.1 Método Ultra Short Baseline (USBL)........................................................................ 24
4.3.2 Método Short Baseline (SBL) ................................................................................... 25
4.3.3 Precisão dos sistemas USBL e SBL ........................................................................... 26
4.3.4 Gama de frequências utilizadas .............................................................................. 26
4.3.5 Fabricantes de sistemas de posicionamento acústico .............................................. 27
4.3.6 Velocidade de propagação ...................................................................................... 27
4.3.7 Multicaminhos........................................................................................................ 27
4.4 Observações .................................................................................................................. 28
5. Localização à Superfície Aquática ........................................................................................ 29
5.1 Técnicas de Localização ................................................................................................. 29
5.2 RFID .............................................................................................................................. 29
5.3 Ultra Wide Band ............................................................................................................ 30
5.4 Wi-Fi / WLAN................................................................................................................. 30
5.5 Bluetooth ...................................................................................................................... 30
5.6 Ultrassons ..................................................................................................................... 31
5.7 Localização Baseada em Visão ....................................................................................... 31
5.8 Campo Magnético ......................................................................................................... 32
5.9 Comparação das Tecnologias Apresentadas .................................................................. 32
6. Referências ......................................................................................................................... 33

Market Survey Equipa F - 2014/2015
5
III – Índice de Figuras Figura 1- Exemplo prático de aplicação utilizando dinamómetro ............................................... 8 Figura 2 - Formas de aplicação de forças ................................................................................... 9 Figura 3 - Força aplicada diretamente ....................................................................................... 9 Figura 4 - Interior de célula de carga ....................................................................................... 10 Figura 5 - Exemplo de aplicação de célula de carga ao problema ............................................. 10 Figura 6 - Exemplo de aplicação do princípio de Pitot .............................................................. 11 Figura 7 - Exemplo de uma estação de medição do nível de água ............................................ 13 Figura 8 - Esquema de medida de caudal de água ................................................................... 14 Figura 9 - Montagem de um toldo para medida ...................................................................... 15 Figura 10 –Exemplo de um Towing Tunnel ............................................................................. 18 Figura 11 - Exemplo de um Cavitation Tunnel .......................................................................... 19 Figura 12 - Exemplo de Software CFD ...................................................................................... 19 Figura 13 - Túneis de vento ..................................................................................................... 20 Figura 14 - Algoritmo de localização ........................................................................................ 22 Figura 15 - Técnicas de localização .......................................................................................... 23 Figura 16 - Exemplo do método USBL ...................................................................................... 24 Figura 17 - Exemplo do método SBL ........................................................................................ 25 Figura 18 - Repetibilidade de diferentes sistemas .................................................................... 26 Figura 19 - Exemplo de multi-caminhos ................................................................................... 28 Figura 20 - Disposição dos componentes do sistema de posicionamento por UWB ................. 30
IV – Índice de Tabelas Tabela 1 - Características de um dinamómetro.......................................................................... 8 Tabela 2 - Características do sensor da ATI .............................................................................. 11 Tabela 3 - Características do sensor da KISTLER ....................................................................... 11 Tabela 4 - Características do sensor da measurement ............................................................. 11 Tabela 5 - Características do sensor da Freescale .................................................................... 13 Tabela 6 - Características do sensor da Johnson Controls ........................................................ 13 Tabela 7 – Exemplos de sensores mecânicos ........................................................................... 14 Tabela 8 – Exemplos de sensores acústicos de medição de velocidade da água ....................... 15 Tabela 9 – Características do sensor TCM-1 Current Meter ..................................................... 16 Tabela 10 – Exemplos de sensores de indução eletromagnética .............................................. 16 Tabela 11 - Comparação entre tecnologias .............................................................................. 21 Tabela 12 - Tipos de localização acústica ................................................................................. 24 Tabela 13 - Gama de frequências ............................................................................................ 26 Tabela 14 – Fabricantes de USBL e SBL .................................................................................... 27 Tabela 15 - Comparação das tecnologias para localização à superfície aquática ...................... 32
Market Survey Equipa F - 2014/2015
6
V – Índice de Equações Equação 1 - Velocidade de propagação das ondas EM ............................................................. 22 Equação 2 - Fórmula do coeficiente de absorção ..................................................................... 22 Equação 3 – Cálculo da distância pelo método ToA (one-way range) ....................................... 23 Equação 4 - Sistema de equações para determinação da posição por trilateração ................... 23 Equação 5 - Velocidade de propagação do som na água ......................................................... 27
VI – Acrónimos e Siglas AoA - Angle-of-Arrival (ângulo de chegada) CFD - Computational Fluid Dynamics EM - Ondas Eletromagnéticas ND - Não Disponível PSK - Phase Shift Keying modulation (modulação em codificação por desfasamento) RFID - Radio Frequency Identification (identificação por rádio-frequência) RSSI - Received Signal Strength Indicator (indicador de força de sinal recebido) SBL - Short Baseline () TDoA - Time Difference of Arrival (diferença de tempo de chegada) ToA - Time of Arrival (tempo de chegada) USBL - Ultra Short Baseline () UWB - Ultra Wide Band (banda ultra larga) WLAN - Wireless Local Area Network (rede sem fios da área local)
Market Survey Equipa F - 2014/2015
7
1. Introdução
1.1 Objetivos O objetivo principal da equipa consiste em desenvolver um sistema de instrumentação para um tanque, mas nem todos os conceitos grosseiramente idealizados serão os melhores para a posterior implementação num sistema real, como é o caso do tanque do laboratório I-108. É essencial, para isso, pesquisar soluções e produtos que satisfaçam as especificações e requisitos que o cliente pretende. Este Market Survey é, assim, muito importante no sentido em que reúne toda a informação relevante do mercado que poderá ajudar a equipa no desenvolvimento do projeto. Faz parte desta informação a viabilidade de cada pesquisa, o seu custo, tempo de desenvolvimento, vantagens, desvantagens e se cumpre, ou não, os objetivos.
1.2 Metodologia Para a realização deste Market Survey, a equipa dividiu o sistema em quatro partes: Medição de Forças, Perturbações Aquáticas, Sistemas de Localização Subaquáticos e Localização à superfície Aquática. Respetivamente a cada uma dessas partes realizou-se uma pesquisa exaustiva e, para além disso, consultaram-se várias entidades. Entre elas estão o orientador da equipa (Professor Aníbal Matos), o cliente (Engenheiro Bruno Ferreira), e o Engenheiro Guilherme Moura Paredes do departamento de Engenharia Civil. Paralelamente às pesquisas efetuadas, a equipa reuniu-se periodicamente por forma a apresentar e discutir ideias e os resultados das respetivas pesquisas entre os membros da equipa. Nestas reuniões, para além das trocas de feedback e opiniões, também se verificou ser importante explorar algumas soluções comuns, simultaneamente, a duas ou mais partes do sistema e verificar que todas as soluções serão compatíveis entre si.
1.3 Estrutura Por forma a otimizar a abordagem dos problemas de engenharia envolvidos no sistema de instrumentação do tanque optou-se por separar o sistema em quatro partes. Desta forma, cada capítulo do presente documento é respetivo a cada um dos subsistemas, nomeadamente:
Cap. 2. Medição de Forças Cap. 3. Perturbações Aquáticas Cap. 4. Sistemas de Localização Subaquáticos Cap. 5. Localização à Superfície Aquática
No final é referenciada a bibliografia consultada.
Market Survey Equipa F - 2014/2015
8
2. Medição de forças 2.1 Introdução Em ambiente subaquático, a medição de forças é algo complexa devido às forças provocadas pela massa de água a que o corpo está sujeito. Nas pesquisas efetuadas destacaram-se essencialmente três processos de medição desse valor. Seguidamente esses mesmos processos serão identificados e explorados.
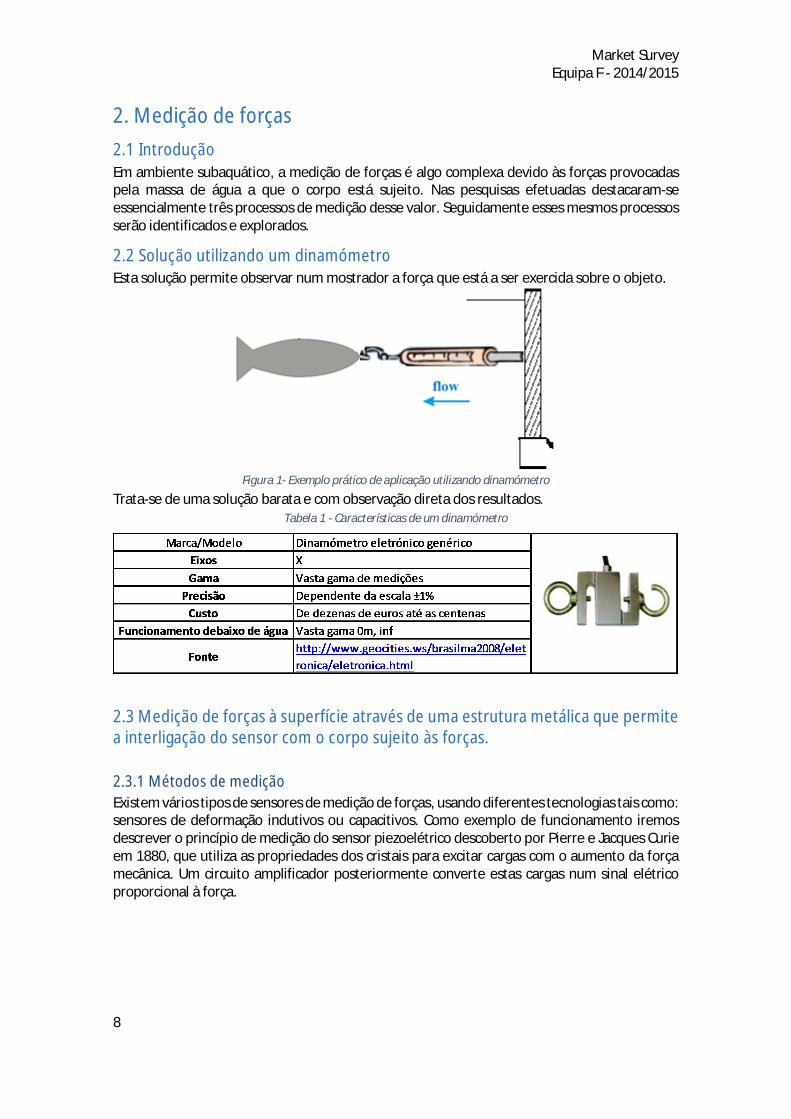
2.2 Solução utilizando um dinamómetro Esta solução permite observar num mostrador a força que está a ser exercida sobre o objeto.
Figura 1- Exemplo prático de aplicação utilizando dinamómetro
Trata-se de uma solução barata e com observação direta dos resultados. Tabela 1 - Características de um dinamómetro
2.3 Medição de forças à superfície através de uma estrutura metálica que permite a interligação do sensor com o corpo sujeito às forças. 2.3.1 Métodos de medição Existem vários tipos de sensores de medição de forças, usando diferentes tecnologias tais como: sensores de deformação indutivos ou capacitivos. Como exemplo de funcionamento iremos descrever o princípio de medição do sensor piezoelétrico descoberto por Pierre e Jacques Curie em 1880, que utiliza as propriedades dos cristais para excitar cargas com o aumento da força mecânica. Um circuito amplificador posteriormente converte estas cargas num sinal elétrico proporcional à força.
Market Survey Equipa F - 2014/2015
9
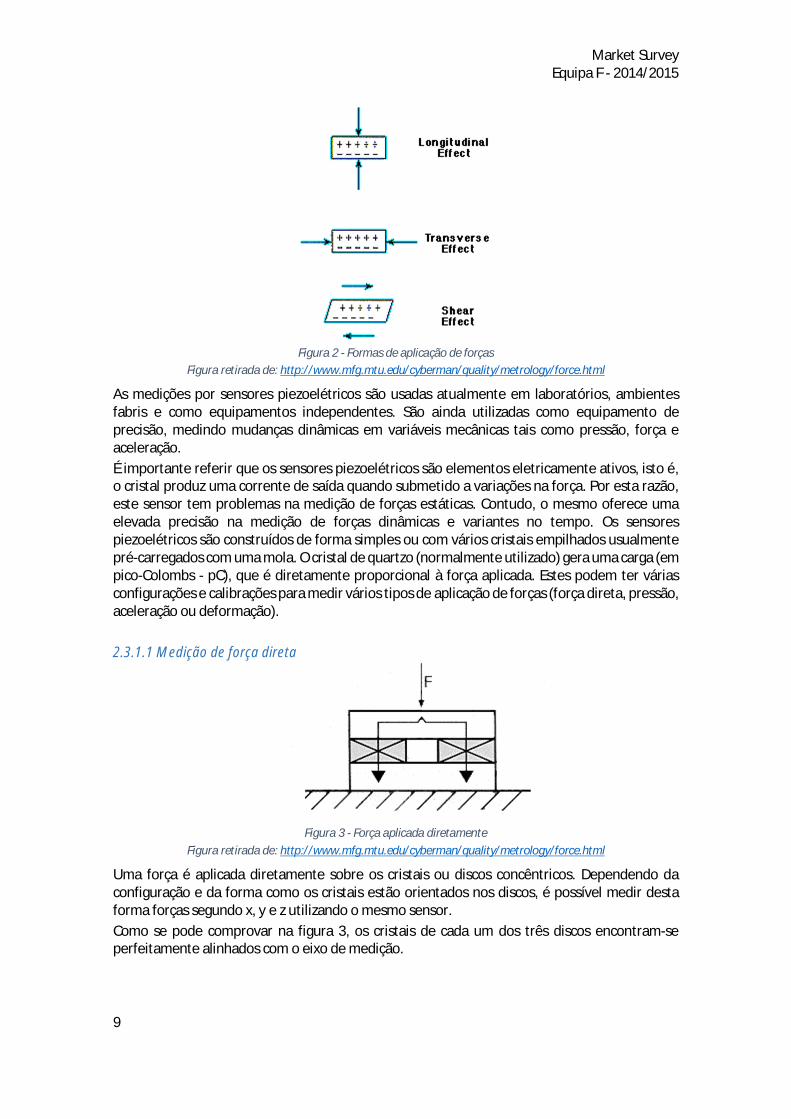
Figura 2 - Formas de aplicação de forças
Figura retirada de: http://www.mfg.mtu.edu/cyberman/quality/metrology/force.html
As medições por sensores piezoelétricos são usadas atualmente em laboratórios, ambientes fabris e como equipamentos independentes. São ainda utilizadas como equipamento de precisão, medindo mudanças dinâmicas em variáveis mecânicas tais como pressão, força e aceleração. É importante referir que os sensores piezoelétricos são elementos eletricamente ativos, isto é, o cristal produz uma corrente de saída quando submetido a variações na força. Por esta razão, este sensor tem problemas na medição de forças estáticas. Contudo, o mesmo oferece uma elevada precisão na medição de forças dinâmicas e variantes no tempo. Os sensores piezoelétricos são construídos de forma simples ou com vários cristais empilhados usualmente pré-carregados com uma mola. O cristal de quartzo (normalmente utilizado) gera uma carga (em pico-Colombs - pC), que é diretamente proporcional à força aplicada. Estes podem ter várias configurações e calibrações para medir vários tipos de aplicação de forças (força direta, pressão, aceleração ou deformação). 2.3.1.1 Medição de força direta
Figura 3 - Força aplicada diretamente
Figura retirada de: http://www.mfg.mtu.edu/cyberman/quality/metrology/force.html
Uma força é aplicada diretamente sobre os cristais ou discos concêntricos. Dependendo da configuração e da forma como os cristais estão orientados nos discos, é possível medir desta forma forças segundo x, y e z utilizando o mesmo sensor. Como se pode comprovar na figura 3, os cristais de cada um dos três discos encontram-se perfeitamente alinhados com o eixo de medição.

Market Survey Equipa F - 2014/2015
10
Figura 4 - Interior de célula de carga
Figura retirada de: http://www.mfg.mtu.edu/cyberman/quality/metrology/force.html
2.3.1.2 Medição indireta de forças Quando não se consegue colocar o sensor diretamente no caminho da força a medir, uma das formas que se pode utilizar é por medição indireta, utilizando o binário da força a medir, isto é, colocando uma barra que pode deslizar sobre um ponto central e cuja ponta aciona o sensor de força. É de notar que, embora este método permita medir forças à distância, o mesmo exige a aplicação de cálculos matemáticos para determinar a força real utilizando a força proporcional medida no sensor.
Figura 5 - Exemplo de aplicação de célula de carga ao problema
Figura retirada de: http://www.people.fas.harvard.edu/~glauder/FishRoboticsLauderHarvard.htm
Market Survey Equipa F - 2014/2015
11
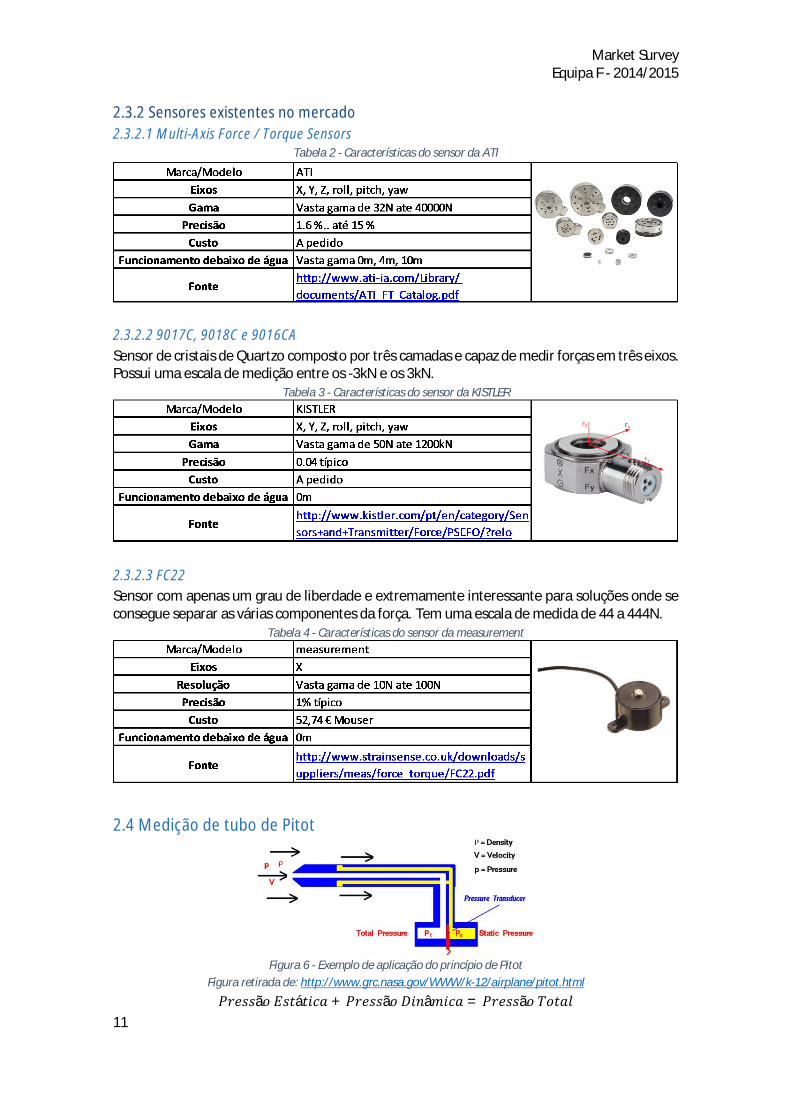
2.3.2 Sensores existentes no mercado 2.3.2.1 Multi-Axis Force / Torque Sensors
Tabela 2 - Características do sensor da ATI
2.3.2.2 9017C, 9018C e 9016CA Sensor de cristais de Quartzo composto por três camadas e capaz de medir forças em três eixos. Possui uma escala de medição entre os -3kN e os 3kN.
Tabela 3 - Características do sensor da KISTLER
2.3.2.3 FC22 Sensor com apenas um grau de liberdade e extremamente interessante para soluções onde se consegue separar as várias componentes da força. Tem uma escala de medida de 44 a 444N.
Tabela 4 - Características do sensor da measurement
2.4 Medição de tubo de Pitot
Figura 6 - Exemplo de aplicação do princípio de Pitot
Figura retirada de: http://www.grc.nasa.gov/WWW/k-12/airplane/pitot.html
푃푟푒푠푠ã표퐸푠푡á푡푖푐푎 + 푃푟푒푠푠ã표퐷푖푛â푚푖푐푎 = 푃푟푒푠푠ã표푇표푡푎푙
Market Survey Equipa F - 2014/2015
12
2.4.1 Introdução O sensor de pressão diferencial possui, numa das entradas, a pressão da altura de água do tanque e, na outra entrada, tem a pressão da altura de água no tanque juntamente com a força que a água exerce contra o objeto. A diferença entre estas duas pressões dá-nos a força (pressão) que o fluxo de água exerce sobre o corpo [1].
2.4.2 Técnicas de medição Existem duas técnicas generalizadas para a medição de pressão: a pressão absoluta, que apenas necessita de um ponto de amostragem e, portanto, todos os valores lidos possuem como referência a pressão atmosférica, e a pressão diferencial que efetua uma amostragem entre dois pontos diferentes, sendo efetuada a subtração destas duas medidas, como se pode observar na Figura 6. 2.4.2.1 Pressão absoluta
1) Diferença entre a pressão atmosférica e o sítio onde está; está calibrado para zero – só desta forma é absoluto
2) Vantagens: obtenho a profundidade pela pressão e maior independência, uma vez que os sensores são todos independentes
3) Desvantagens: difíceis de calibrar quando estão à mesma profundidade (quando estão dois sensores à mesma profundidade é muito difícil obter o mesmo valor de profundidade num e noutro).
2.4.2.2 Pressão diferencial 1) Mede a diferença de pressão entre dois pontos 2) Vantagens: excelente para medir diferenças de pressão à mesma altura 3) Desvantagens: não fornece o valor da profundidade a que se encontra; logo, estando
ambos os tubos à mesma profundidade, é impossível identificá-la.
O tubo de Pitot tem uma sonda de medida que é inserido numa canalização, perpendicular à direção do fluido. Esta vareta metálica contem vários furos na parte exterior de cada lado. Dois tubos separados ligam estes furos a um sensor de pressão diferencial, que consiste numa membrana que separa estas duas zonas, permitindo uma medida de pressão precisa. Quando o fluido se move num dado sentido, é exercida uma pressão num dos lados da vareta, também conhecida como pressão dinâmica. Em contraste, no outro lado da sonda só é medida a pressão estática, que é constante e não está relacionada com o fluxo. Como resultado, diferentes valores são detetados no sensor de pressão diferencial, e esta diferença de pressão é uma medida direta da velocidade do fluido e consequentemente a massa e fluxo volumétrico na canalização. Esta medida pode ser feita nos dois sentidos do fluido, para por exemplo gases. Uma particularidade importante e única desta tecnologia é a sua adaptação em tubos extremamente largos, até 12 metros de diâmetro. [2] 2.4.3 Sensores existentes 2.4.3.1 MPXV7002 -2 a 2 kPa (-0.3 a 0.3 psi) Compacto e barato.

Market Survey Equipa F - 2014/2015
13
Tabela 5 - Características do sensor da Freescale
2.4.3.2 Sensor de pressão diferencial de elevada resolução Sensor para medição de pressão de líquidos.
Tabela 6 - Características do sensor da Johnson Controls
2.5. Medição de caudal e velocidade da água Segundo “The U.S. Geological Survey (USGS)”, para medir o caudal de água num rio, ou seja a quantidade de água que está a fluir dum dado instante, é necessário saber o nível da água em relação a uma referência onde a altura da agua é zero. O nível zero é arbitrário mas é tipicamente perto do solo terrestre do rio [3].
Figura 7 - Exemplo de uma estação de medição do nível de água Figura retirada de: http://water.usgs.gov/edu/streamflow1.html
Esta medida do nível da água, que pode ser obtida com vários métodos, fornece informação do caudal para varias aplicações, incluindo previsão de cheias, gestão e alocação de água, design de engenharia, investigação, operação de passagem de um veículo por uma barragem, e segurança em ambientes recreativos. Determinar o caudal a partir do nível da água requere definir a relação entre as duas grandezas, dividindo o rio em secções. O caudal é o volume de água que atravessa uma dada área por unidade de tempo. Generalizando, o caudal do rio é calculado multiplicando a área de água numa secção transversal do canal, pela velocidade média da água nessa secção, como mostra a Figura 8.

Market Survey Equipa F - 2014/2015
14
Figura 8 - Esquema de medida de caudal de água
Figura retirada de: http://water.usgs.gov/edu/streamflow2.html
A leitura do caudal total do rio é feita somando o caudal de cada subsecção. No caso do tanque em que estamos a trabalhar, a altura é constante ao longo do tanque e por isso o desafio que se levanta é determinar a velocidade da água. Para isso já existem algumas abordagens. 2.5.1 Solução mecânica Os medidores mecânicos de correntes de água são baseados principalmente em contar as rotações de um propulsor, como uma versão aquática de um anemómetro. Existem soluções tecnológicas desde meados do século XX, com o aparecimento do “Ekman current meter” que fazia cair bolas num recipiente para contar o número de rotações. Agora tipicamente um aparelho deste tipo conta eletronicamente o número de rotações do propulsor por cada intervalo de tempo. Na Tabela 7 apresentam-se alguns exemplos de soluções existentes.
Tabela 7 – Exemplos de sensores mecânicos

Market Survey Equipa F - 2014/2015
15
2.5.2 Solução acústica Para medir velocidades com ondas sonoras ultrassónicas, é usado o Efeito Doppler e tipicamente para medir velocidades de fluidos estes sensores mantêm-se fora do fluxo, o que permite leituras eficientes e precisas de fluxo sob várias condições desafiantes do fluxo e do ambiente, como perturbações no sensor, presença de corpos sólidos no fluido, altas temperaturas, fluxos rasos e corrosivos, grandes canais construídos pelo homem, e altas velocidades. Existem também soluções submersas. Genericamente estes sensores medem as velocidades das correntes ao longo de um intervalo de profundidade, utilizando o efeito de Doppler de ondas sonoras que são refletidas nas partículas dentro da coluna de água. O tempo de voo da onda sonora é usado para determinar a posição das partículas do líquido em movimento. Na Tabela 8 são apresentados alguns exemplos.
Tabela 8 – Exemplos de sensores acústicos de medição de velocidade da água
2.5.3. Solução baseada em inclinação de um toldo
Figura 9 - Montagem de um toldo para medida
Figura retirada de: http://www.nefsc.noaa.gov/epd/ocean/MainPage/tilt/shtcm.html
Market Survey Equipa F - 2014/2015
16
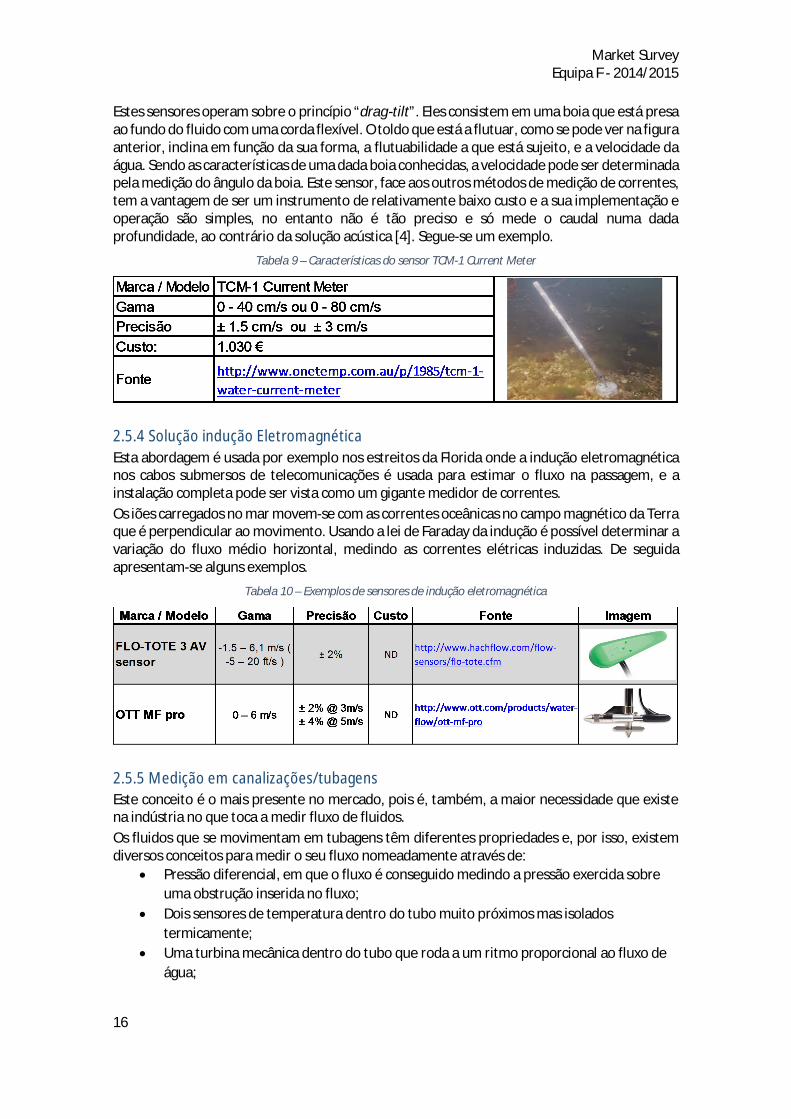
Estes sensores operam sobre o princípio “drag-tilt”. Eles consistem em uma boia que está presa ao fundo do fluido com uma corda flexível. O toldo que está a flutuar, como se pode ver na figura anterior, inclina em função da sua forma, a flutuabilidade a que está sujeito, e a velocidade da água. Sendo as características de uma dada boia conhecidas, a velocidade pode ser determinada pela medição do ângulo da boia. Este sensor, face aos outros métodos de medição de correntes, tem a vantagem de ser um instrumento de relativamente baixo custo e a sua implementação e operação são simples, no entanto não é tão preciso e só mede o caudal numa dada profundidade, ao contrário da solução acústica [4]. Segue-se um exemplo.
Tabela 9 – Características do sensor TCM-1 Current Meter
2.5.4 Solução indução Eletromagnética Esta abordagem é usada por exemplo nos estreitos da Florida onde a indução eletromagnética nos cabos submersos de telecomunicações é usada para estimar o fluxo na passagem, e a instalação completa pode ser vista como um gigante medidor de correntes. Os iões carregados no mar movem-se com as correntes oceânicas no campo magnético da Terra que é perpendicular ao movimento. Usando a lei de Faraday da indução é possível determinar a variação do fluxo médio horizontal, medindo as correntes elétricas induzidas. De seguida apresentam-se alguns exemplos.
Tabela 10 – Exemplos de sensores de indução eletromagnética
2.5.5 Medição em canalizações/tubagens Este conceito é o mais presente no mercado, pois é, também, a maior necessidade que existe na indústria no que toca a medir fluxo de fluidos. Os fluidos que se movimentam em tubagens têm diferentes propriedades e, por isso, existem diversos conceitos para medir o seu fluxo nomeadamente através de:
Pressão diferencial, em que o fluxo é conseguido medindo a pressão exercida sobre uma obstrução inserida no fluxo;
Dois sensores de temperatura dentro do tubo muito próximos mas isolados termicamente;
Uma turbina mecânica dentro do tubo que roda a um ritmo proporcional ao fluxo de água;
Market Survey Equipa F - 2014/2015
17
Princípio de vortex, em que são medidas as frequências das vibrações de remoinhos do fluido, causados por uma barreira no fluido em movimento;
Indução eletromagnética; Efeito Doppler.
2.6. Observações O custo das tecnologias de medida não foi apresentado em várias soluções por falta de informação, mas generalizando em cada tipo de abordagem tipicamente serão estes os preços:
Solução mecânica: €200 a €1000 Solução acústica: €1.500 a €10.000 Solução de indução eletromagnética: a partir de €2500
Quando se pretende medir uma força, idealiza-se de imediato a utilização de uma balança. Este conceito está correto embora, numa análise mais cuidada, se constate que existem vários métodos de aplicação de forças sobre um objeto. A solução de dinamómetro exposta em 2.2 torna-se impraticável, pois apenas permite medir forças segundo um único eixo. Contudo, conforme exposto posteriormente em 2.3, é possível medir as várias componentes de força empilhando várias balanças, por forma a cada uma estar direcionada para medir um eixo específico. Esta construção é designada de célula de carga. Uma outra técnica mais evoluída para medição de forças consiste na utilização de um sensor diferencial para medir a diferença existente entre as forças aplicadas a cada uma das suas extremidades, obtendo assim a força resultante. No entanto, torna-se complexo medir forças segundo diversos eixos, uma vez que seriam necessários vários tubos de Pitot dispostos perpendicularmente entre si. Dos processos de medição apresentados, a metodologia aplicada nas células de carga é a que apresenta melhores caraterísticas face à tecnologia rudimentar da utilização de dinamómetros ou à utilização complexa, no que toca a mecânica (estrutura) e mecânica de fluidos, de tubos de Pitot, apesar de que esta seria uma solução para também medir a velocidade e caudal da água tendo em conta que se pretende utilizar uma estrutura cilíndrica para geração de correntes aquáticas, o que será falado no capítulo seguinte. Quanto à medida isolada de velocidade e caudal da água, as soluções mecânicas são, sem dúvida, as mais adaptadas ao sistema a ser projetado e as mais baratas. Para além disso, são também as soluções tecnicamente mais simples quando comparadas com as soluções de indução eletromagnética e ultrassónica. No que toca ao posicionamento mecânico para leituras fiáveis e havendo necessidade de operar manualmente no que respeita a condicionamento, filtragem e processamento de sinal de saída dos sensores, seria também mais fácil e adequado às limitações do projeto apesar de que, como resultado final, se obteria melhor precisão com as soluções acústicas.
Market Survey Equipa F - 2014/2015
18
3. Perturbações aquáticas Tendo como objetivo a criação de perturbações no espaço de testes (tanque) que permitam recriar as condições a que um veículo está sujeito em ambiente não controlado, foi feita uma pesquisa de soluções que vão de encontro ao problema. Estas soluções estão divididas em três áreas de interesse e, embora ímpares no método, todas convergem para uma resposta positiva ao problema. Não se rejeita a possibilidade de utilização de tecnologias de áreas diferentes em simultâneo.
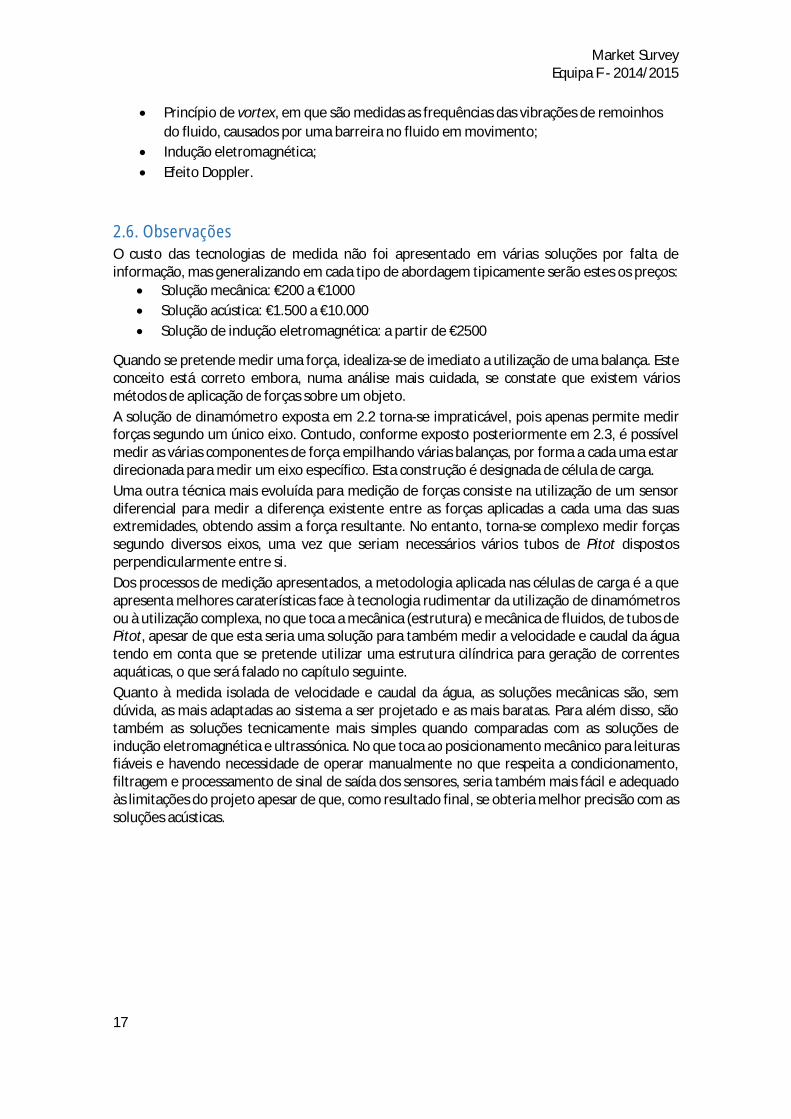
3.1 Estudo em habitat natural (sistema fechado) A aproximação da dinâmica do sistema submarino-água em ambiente não controlado passa pela criação de fluxos de água com recurso a motores ou bombas de água ou, numa outra abordagem a esta temática, a criação de uma estrutura que arrasta o veículo ao longo de umas dezenas de metros num tanque de água, geralmente, não circulante. Exemplos disso são as instalações do tipo Towing Tank (Tanque de Reboque) e Cavitation Tunnel (Túnel de Cavitação): 3.1.1 Towing Tank Estas instalações são normalmente compostas por um tanque de água com um comprimento que pode atingir 200 m percorrido por uma plataforma de arrasto altamente instrumentada que assenta em carris podendo atingir uma velocidade de 10 m/s. Permite a medição precisa de todas as variáveis de interesse em tempo real de modelos de veículos à escala. Certas instalações oferecem teste com ondas e vento simulando desta forma grande parte das condições reais.
Figura 10 –Exemplo de um Towing Tunnel
Figura retirade de: http://www.adafruit.com/products/828
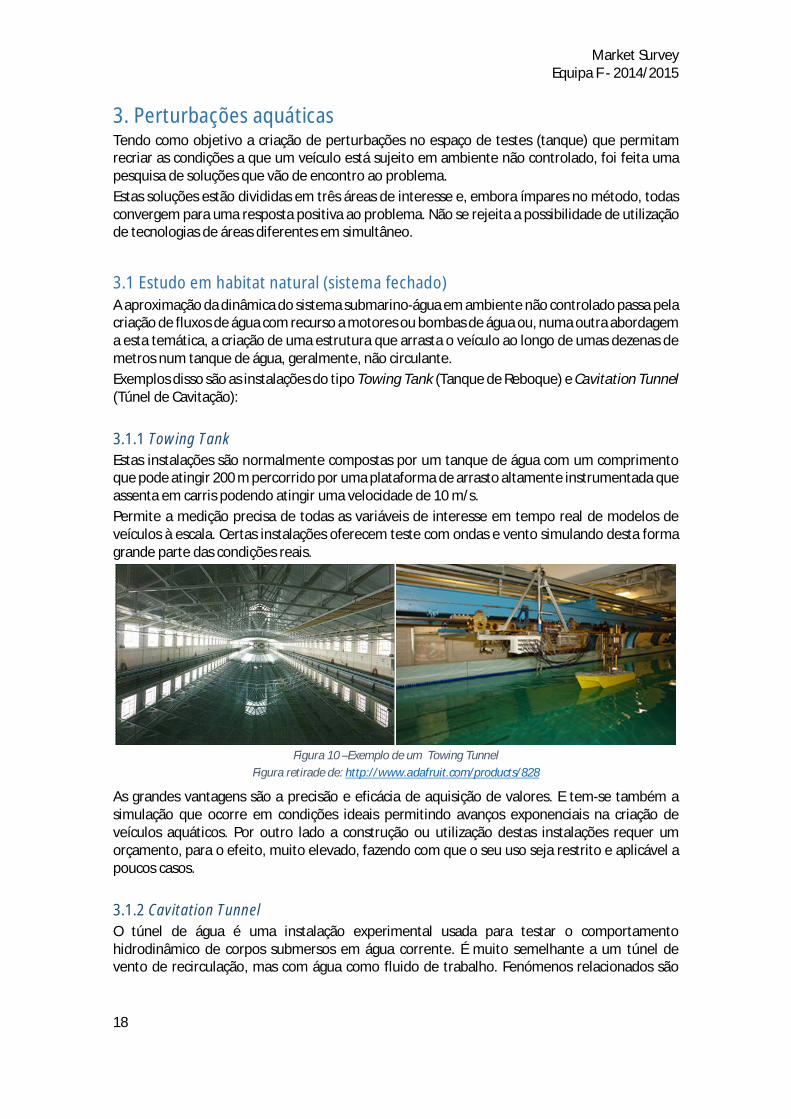
As grandes vantagens são a precisão e eficácia de aquisição de valores. E tem-se também a simulação que ocorre em condições ideais permitindo avanços exponenciais na criação de veículos aquáticos. Por outro lado a construção ou utilização destas instalações requer um orçamento, para o efeito, muito elevado, fazendo com que o seu uso seja restrito e aplicável a poucos casos. 3.1.2 Cavitation Tunnel O túnel de água é uma instalação experimental usada para testar o comportamento hidrodinâmico de corpos submersos em água corrente. É muito semelhante a um túnel de vento de recirculação, mas com água como fluido de trabalho. Fenómenos relacionados são
Market Survey Equipa F - 2014/2015
19
estudados, tais como a medição das forças sobre modelos em escala de submarinos ou sustentação ou arrasto em hidrofólios. Estes sistemas utilizam bombas de água com potência na ordem de algumas centenas de kW que permitem criar correntes acima dos 25 km/h. O sistema é instrumentado por forma a fazer uma leitura precisa de valores físicos cruciais a todo o instante, sendo um sistema preciso e eficaz na aquisição de valores.
Figura 11 - Exemplo de um Cavitation Tunnel Figura retirada de: http://www.cto.gda.pl
Trata-se de uma simulação que ocorre em condições ideais permitindo avanços exponenciais na criação de veículos subaquáticos. Mas a construção ou utilização destas instalações requer um orçamento para o efeito muito elevado fazendo com que o seu uso seja restrito e aplicável a poucos casos, para além de não ser aplicável a veículos de superfície.
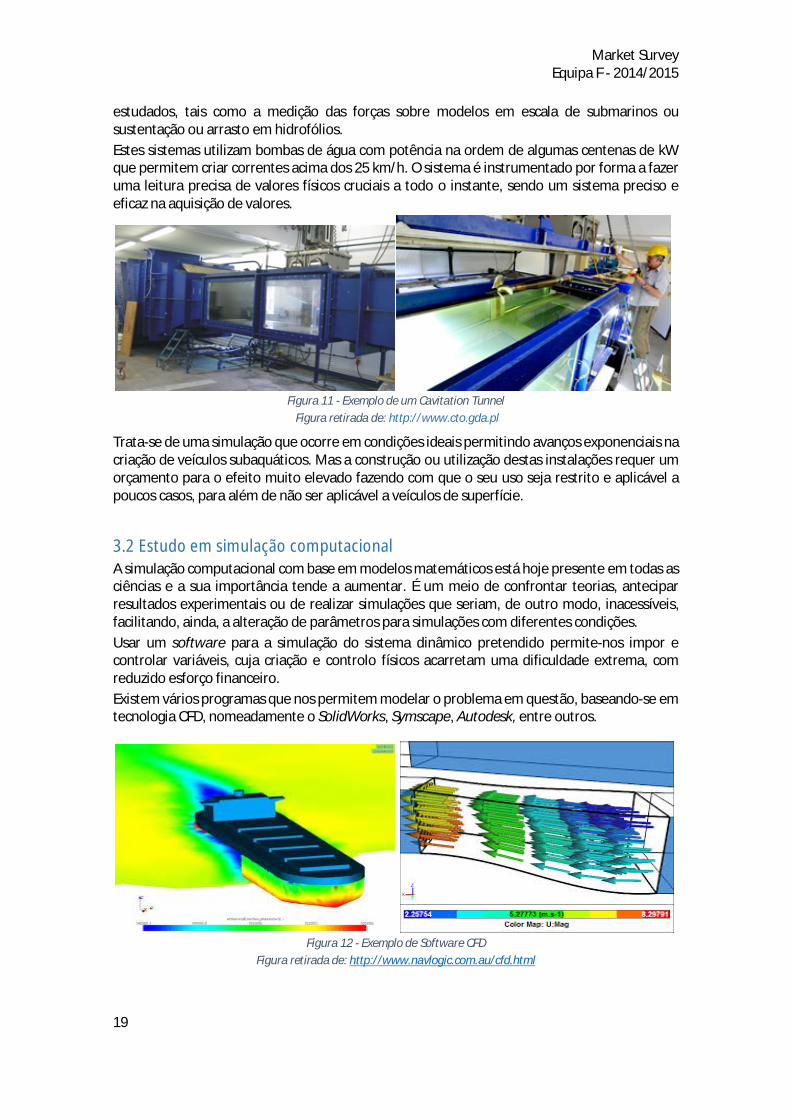
3.2 Estudo em simulação computacional A simulação computacional com base em modelos matemáticos está hoje presente em todas as ciências e a sua importância tende a aumentar. É um meio de confrontar teorias, antecipar resultados experimentais ou de realizar simulações que seriam, de outro modo, inacessíveis, facilitando, ainda, a alteração de parâmetros para simulações com diferentes condições. Usar um software para a simulação do sistema dinâmico pretendido permite-nos impor e controlar variáveis, cuja criação e controlo físicos acarretam uma dificuldade extrema, com reduzido esforço financeiro. Existem vários programas que nos permitem modelar o problema em questão, baseando-se em tecnologia CFD, nomeadamente o SolidWorks, Symscape, Autodesk, entre outros.
Figura 12 - Exemplo de Software CFD
Figura retirada de: http://www.navlogic.com.au/cfd.html

Market Survey Equipa F - 2014/2015
20
3.3 Estudo em fluido equiparável Num primeiro olhar, água e ar não parecem partilhar equivalências, no entanto o facto de ambos serem fluidos compostos por moléculas em movimento contínuo e aleatório torna o seu comportamento dinâmico semelhante em vários aspetos. Estas proximidades estão diretamente relacionadas com o coeficiente de Reynolds. Pode-se dizer que dois sistemas são dinamicamente semelhantes se o número de Reynolds, uma grandeza adimensional, for igual em ambos. Desta forma o teste de modelos de veículos subaquáticos em tuneis de vento representa uma forma cost effective de avaliar a estabilidade, as características de controlo e a performance de propulsão deste tipo de veículos.
Figura 13 - Túneis de vento
Figura retirada de: http://www.oobject.com/category/spectacular-wind-tunnels/
Pelo lado positivo o custo de aluguer de uma instalação de testes deste tipo tem um custo de cerca de um quarto quando comparado com um túnel de água e para um período de utilização equivalente o número de resultados obtidos é substancialmente maior. Os protótipos usados nos estudos com esta infraestrutura tem um custo associado bastante reduzido quando comparado com os usados em tuneis de cavitação. Como grande senão destes sistemas temos que quando comparados com a utilização de software CFD o orçamento necessário não se encontra sequer na mesma escala. E por outro lado o seu uso não permite o teste de 100% das variáveis de interesse no tipo de veículos subaquáticos. Estes aspetos podem obrigar à utilização de outra tecnologia.
3.4 Observações Comparadas as três abordagens, destaca-se a eficácia com que qualquer uma das mesmas serviria o propósito. Contudo, no que diz respeito à viabilidade de execução, a equipa identifica a hipótese de software CFD como a mais concretizável. Esta destaca-se, primeiramente, pelos custos envolvidos na sua atividade e, num segundo plano, pela diversidade de testes possíveis de realizar sem grande esforço acrescentado e respetivas leituras de todos os valores de interesse.

Market Survey Equipa F - 2014/2015
21
4. Sistemas de localização subaquáticos 4.1 Baseado em comunicações óticas Sistemas baseados em comunicações óticas têm uma velocidade de propagação alta, porém, devido às partículas em suspensão e água turva, são uma má opção para longas distâncias.
4.2 Baseado em comunicações EM (ondas eletromagnéticas) Ondas eletromagnéticas podem ser a solução quando queremos ter a melhor taxa de transferência (cerca de 150.000 vezes mais rápida que a comunicação acústica) sem termos o problema da reflexão e refração das ondas e perturbações criadas pelas partículas suspensas na água. Na maioria das vezes este tipo de comunicação nem sequer é considerado, visto que a distância de propagação é muito curta. Para o nosso caso o cliente definiu como requisito uma distância de 50m (dimensões de uma piscina olímpica – 50x25m) por isso a comunicação por EM é perfeitamente viável como podemos verificar na próxima tabela.
Tabela 11 - Comparação entre tecnologias
TechnologyWorking
frequency Length Wave Modulation DistanceData transfer
ratesElectroMagn
etic waves1 KHz N/app BPSK 2 m 1 Kbps
ElectroMagnetic waves 3 KHz N/app N/av 40 m 100 bps
ElectroMagnetic waves 10 KHz N/app BPSK 16 m 1 Kbps
ElectroMagnetic waves 100 KHz N/app BPSK 6 m 1 Kbps
ElectroMagnetic waves 5 MHz N/app N/av 90 m 500 Kbps
ElectroMagnetic waves 25 MHz N/app N/av 85 m N/av
ElectroMagnetic waves 100 MHz N/app N/av 0.053 m N/av
Optical Waves N/av 420 nm PPM 1.8 m 100 Kbps
Optical Waves N/av 470 nm N/av 10 m 10 Mbps
Acoustic Waves 12 KHz N/app
MIMO-OFDM N/av 24.36 Kbps
Acoustic Waves 24 KHz N/app QPSK 2500 m 30 Kbps
Acoustic Waves 70 KHz N/app ASK 70 m 0.2 Kbps
Acoustic Waves 800 KHz N/app BPSK 1 m 80 Kbps

Market Survey Equipa F - 2014/2015
22
As EM dependem da permeabilidade, permissividade, condutividade e densidade elétrica da água. Quanto maior a frequência destas ondas, maior é a atenuação devida à condutividade da água. A velocidade de propagação das ondas EM em água natural pode ser aproximada pela Equação 1.
Equação 1 - Velocidade de propagação das ondas EM
푐 ≈1
(1 + 휒 ) ∗ 8.85 ∗ 10 ∗ 휇 ∗ 4휋 ∗ 10
휒 = 푠푢푠푐푒푝푡푖푏푖푙푖푑푎푑푒푒푙é푡푟푖푐푎 휇 = 푝푒푟푚푒푎푏푖푙푖푑푎푑푒푚푎푔푛é푡푖푐푎
Equação 2 - Fórmula do coeficiente de absorção
훼 =휎2∗
휇 ∗ 4휋 ∗ 10(1 + 휒 ) ∗ 8.85 ∗ 10
훼 = 푐표푒푓푖푐푖푒푛푡푒푑푒푎푏푠표푟çã표 휎 = 푐표푛푑푢푡푖푣푖푑푎푑푒푒푙é푡푟푖푐푎
Como podemos observar a propagação e absorção das ondas em água natural não depende da frequência utilizada. Para transmitir este tipo de ondas podemos utilizar diferentes tipos de modulação: por pulso ou por onda contínua. A mais fácil de utilizar seria a modulação por pulso do tipo PSK (Phase Shift Keying modulation). Neste tipo de modulação a fase da onda varia mas a amplitude mantém-se a mesma. 4.2.1 Localização por EM O algoritmo de localização pode ser dividido em 3 passos (Figura 14):
1º Estimação da distância/ângulo 2º Cálculo da posição 3º Calibração
Figura 14 - Algoritmo de localização
Market Survey Equipa F - 2014/2015
23
Para o primeiro passo, a estimação pode ser determinada de várias formas: – RSSI (Received Signal Strength Indicator): estimação baseada nas perdas de propagação do sinal. Método inconveniente devido à dificuldade de prever as perdas num ambiente com as propriedades em constante variação. – AoA (Angle-of-Arrival): estimação do ângulo entre o caminho de propagação do sinal e a direção de referência. Opção pouco utilizada devido ao tamanho e custo de antenas direcionais. – TDoA (Time Difference of Arrival): estimação pela diferença de tempo entre 2 sinais com diferentes velocidades de propagação, geralmente um sinal rádio e um sinal acústico. – ToA (Time of Arrival): método mais simples e intuitivo. Pode ser one-way range ou two-way range. No primeiro calcula-se a distância através da diferença da hora a que o sinal chegou ao destino e a hora em que o sinal foi enviado (Equação 3). A hora em que o sinal partiu deve ser enviada no sinal e, para além disso, os nós devem estar sincronizados.
Equação 3 – Cálculo da distância pelo método ToA (one-way range)
푑 = 푠 (푡 − 푡 ), onde 푠 é a velocidade de propagação.
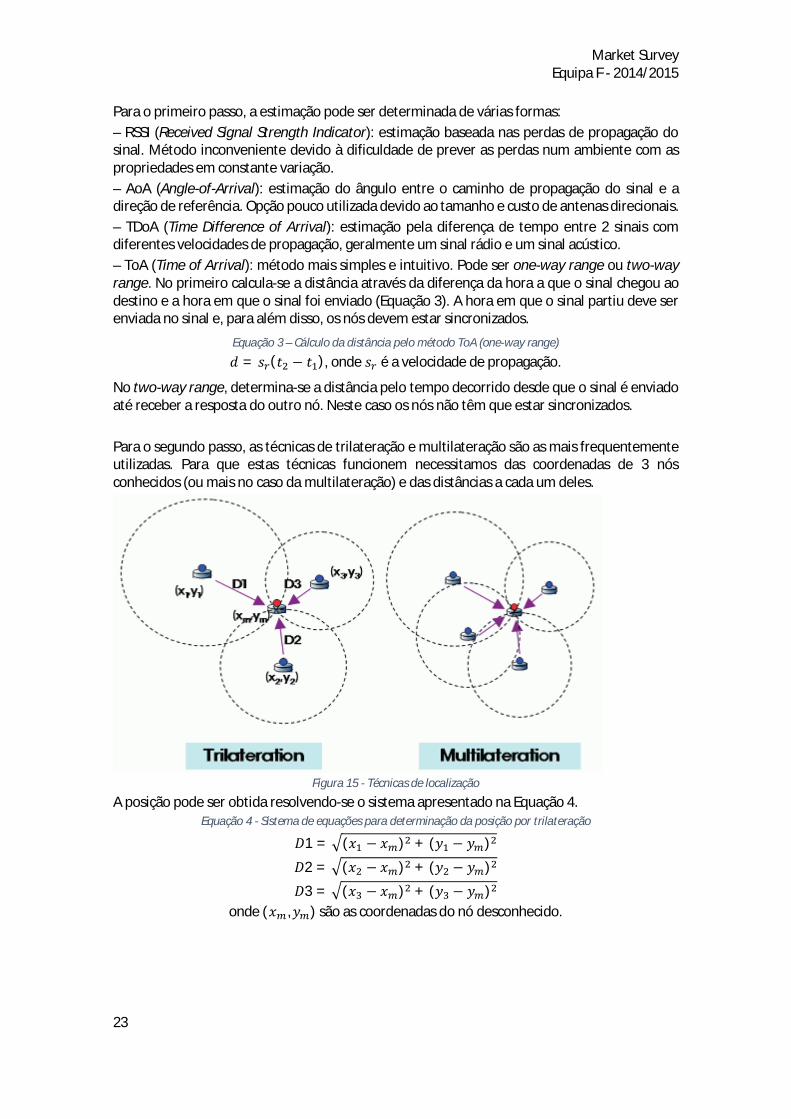
No two-way range, determina-se a distância pelo tempo decorrido desde que o sinal é enviado até receber a resposta do outro nó. Neste caso os nós não têm que estar sincronizados. Para o segundo passo, as técnicas de trilateração e multilateração são as mais frequentemente utilizadas. Para que estas técnicas funcionem necessitamos das coordenadas de 3 nós conhecidos (ou mais no caso da multilateração) e das distâncias a cada um deles.
Figura 15 - Técnicas de localização
A posição pode ser obtida resolvendo-se o sistema apresentado na Equação 4. Equação 4 - Sistema de equações para determinação da posição por trilateração
퐷1 = (푥 − 푥 ) + (푦 − 푦 )
퐷2 = (푥 − 푥 ) + (푦 − 푦 )
퐷3 = (푥 − 푥 ) + (푦 − 푦 ) onde (푥 ,푦 ) são as coordenadas do nó desconhecido.

Market Survey Equipa F - 2014/2015
24
4.3 Baseado em comunicações acústicas As ondas acústicas apresentam características de propagação na água superiores à propagação no ar sendo amplamente adotadas pelos sistemas de localização para determinar o posicionamento horizontal de veículos debaixo de água, já que o posicionamento vertical pode ser dado diretamente através de um medidor de pressão. Existem diferentes tipos de localização acústica que são diferenciados pela distância entre os sensores. Os três principais tipos são, de uma forma geral, definidos conforme a Tabela 12.
Tabela 12 - Tipos de localização acústica
Seguidamente serão explorados os primeiros dois tipos de localização acústica apresentados na Tabela 12. O terceiro, Long Baseline, não será abordado visto não ser adequado às dimensões pretendidas no sistema. 4.3.1 Método Ultra Short Baseline (USBL)
Figura 16 - Exemplo do método USBL
Este sistema utiliza um transcetor acoplado a uma estrutura, que pode ficar à superfície, assim como um transponder montado no veículo. O transcetor emite um sinal que é detetado pelo transponder e este responde emitindo outro sinal que vai ser detetado pelo transcetor acoplado à estrutura. O tempo entre a transmissão do sinal e a receção da resposta permite calcular a distância. Para calcular a localização do veículo temos agora que calcular o ângulo que este faz com o transcetor. Este transcetor é composto por um conjunto de transdutores (pelo menos 3) em série e separados entre si, no máximo, por 10 cm. Ao medir a diferença de fases na receção do sinal por parte dos diferentes transdutores podemos determinar o ângulo que o veículo faz com a estrutura. Conjugando a distância com o ângulo obtemos a posição do veículo relativamente à estrutura onde acoplamos o transcetor.
Type of Acoustic Positioning System Baseline LengthUltrashort Baseline <10cm
Short Baseline 20m to 50mLong Baseline 100m to 6000m+
Market Survey Equipa F - 2014/2015
25
As vantagens do Ultra Short Baseline (USBL) são: Baixa complexidade e, portanto, facilidade de utilização; Pode ser montado na embarcação, não há a necessidade de o colocar no fundo do
mar;
As desvantagens desta tecnologia são: Requer uma calibração rigorosa; Posicionamento absoluto depende de sensores adicionais; Redundância reduzida.
4.3.2 Método Short Baseline (SBL)
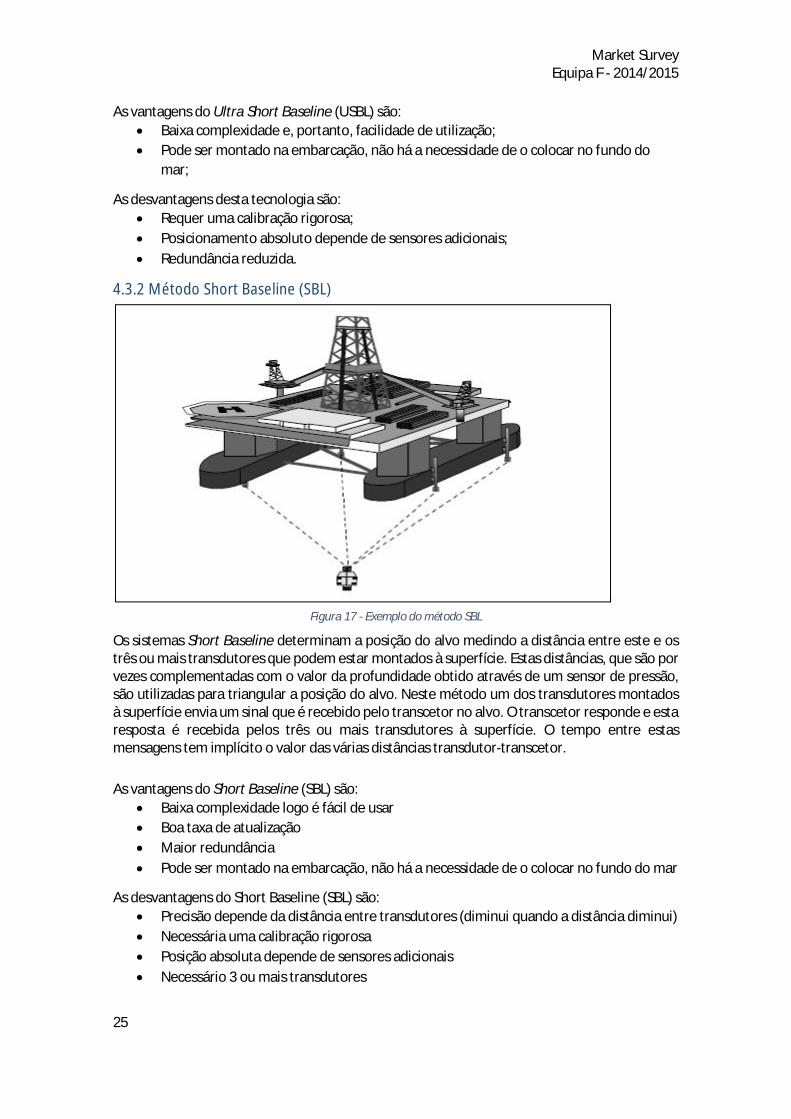
Figura 17 - Exemplo do método SBL
Os sistemas Short Baseline determinam a posição do alvo medindo a distância entre este e os três ou mais transdutores que podem estar montados à superfície. Estas distâncias, que são por vezes complementadas com o valor da profundidade obtido através de um sensor de pressão, são utilizadas para triangular a posição do alvo. Neste método um dos transdutores montados à superfície envia um sinal que é recebido pelo transcetor no alvo. O transcetor responde e esta resposta é recebida pelos três ou mais transdutores à superfície. O tempo entre estas mensagens tem implícito o valor das várias distâncias transdutor-transcetor. As vantagens do Short Baseline (SBL) são:
Baixa complexidade logo é fácil de usar Boa taxa de atualização Maior redundância Pode ser montado na embarcação, não há a necessidade de o colocar no fundo do mar
As desvantagens do Short Baseline (SBL) são: Precisão depende da distância entre transdutores (diminui quando a distância diminui) Necessária uma calibração rigorosa Posição absoluta depende de sensores adicionais Necessário 3 ou mais transdutores
Market Survey Equipa F - 2014/2015
26
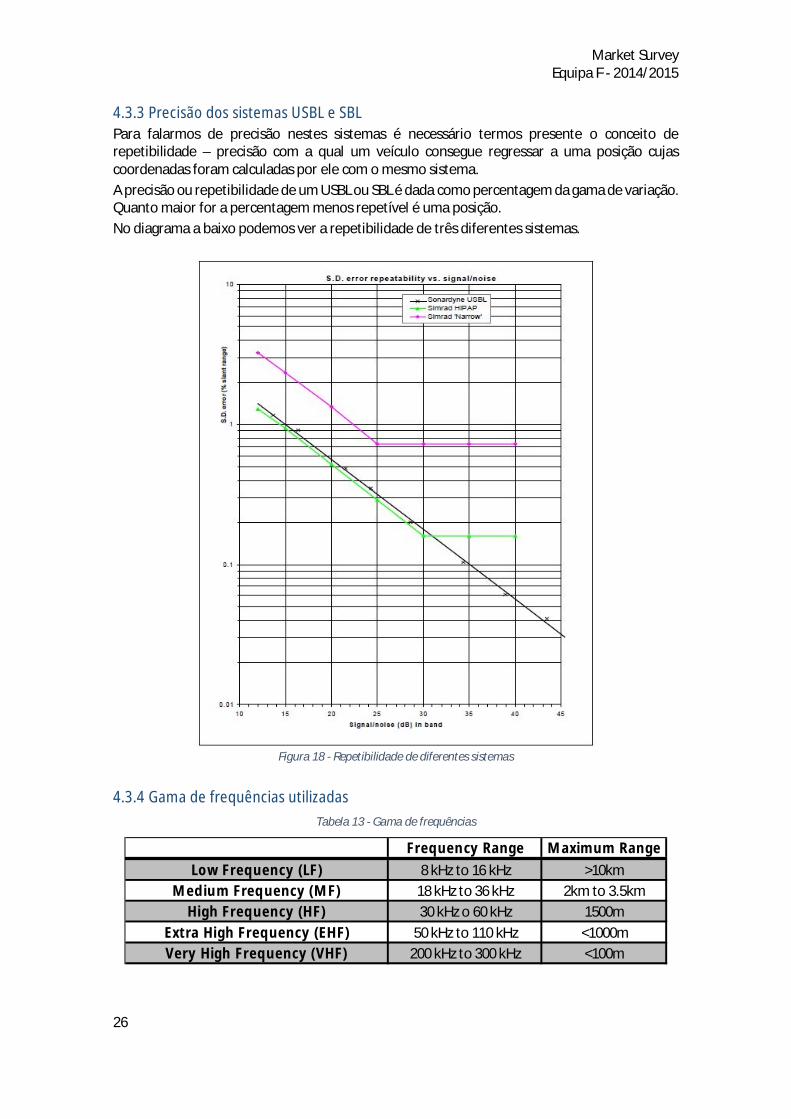
4.3.3 Precisão dos sistemas USBL e SBL Para falarmos de precisão nestes sistemas é necessário termos presente o conceito de repetibilidade – precisão com a qual um veículo consegue regressar a uma posição cujas coordenadas foram calculadas por ele com o mesmo sistema. A precisão ou repetibilidade de um USBL ou SBL é dada como percentagem da gama de variação. Quanto maior for a percentagem menos repetível é uma posição. No diagrama a baixo podemos ver a repetibilidade de três diferentes sistemas.
Figura 18 - Repetibilidade de diferentes sistemas
4.3.4 Gama de frequências utilizadas
Tabela 13 - Gama de frequências
Frequency Range Maximum RangeLow Frequency (LF) 8 kHz to 16 kHz >10km
Medium Frequency (MF) 18 kHz to 36 kHz 2km to 3.5kmHigh Frequency (HF) 30 kHz o 60 kHz 1500m
Extra High Frequency (EHF) 50 kHz to 110 kHz <1000mVery High Frequency (VHF) 200 kHz to 300 kHz <100m
Market Survey Equipa F - 2014/2015
27
4.3.5 Fabricantes de sistemas de posicionamento acústico Tabela 14 – Fabricantes de USBL e SBL
4.3.6 Velocidade de propagação A velocidade de propagação do som na água depende de vários fatores. Como não existe uma fórmula exata para a calcular foram feitos vários estudos ao longo dos anos baseados numa fórmula empírica de Wilson (1960) com o objetivo de descobrir a solução que melhor modulasse o sistema. Uma das soluções obtidas é dada pela seguinte expressão:
Equação 5 - Velocidade de propagação do som na água
푐 = 1449.2 + 4.6푇 − 0.055푇 + 0.00029푇 + (1.34− 0.01푇)(푆 − 35) + 0.016퐷(푚 푠)⁄
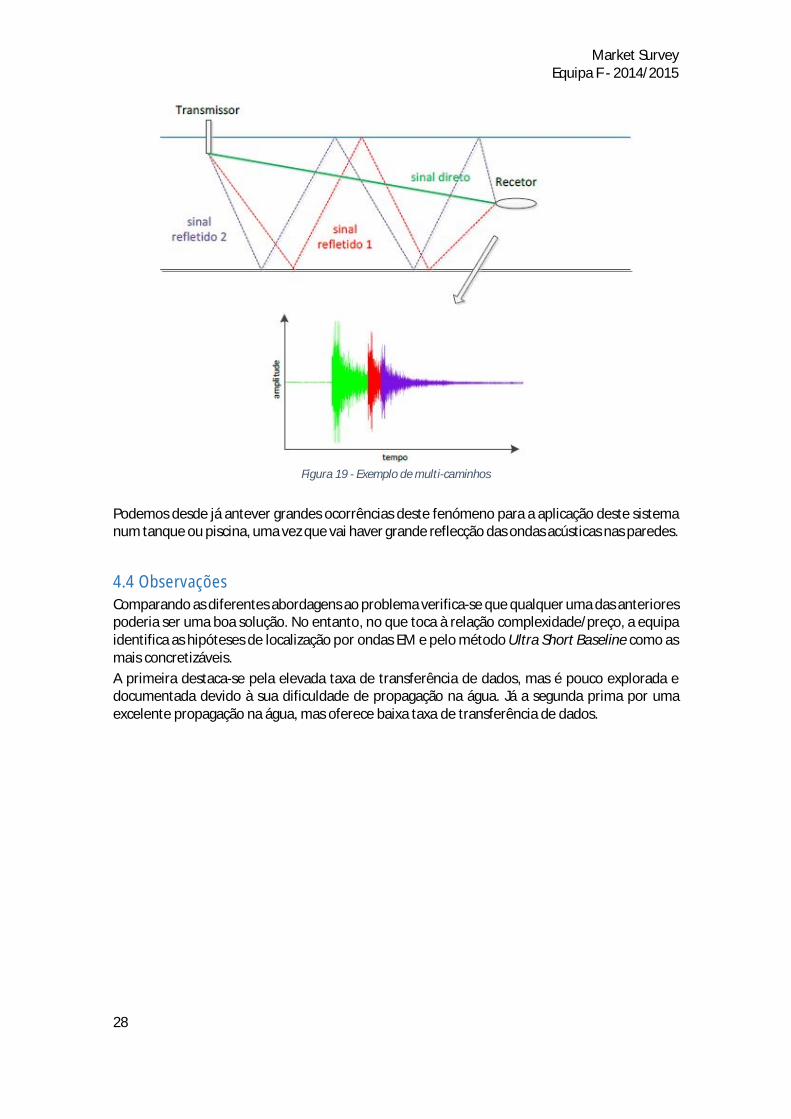
Que será aceitável para as seguintes gamas de valores: 푇 = Temperatura = 0° a 35° C 푆 = Salinidade = 0 a 40 partes por milhar 퐷= Profundidade = 0 a 1000m Como podemos verificar, a temperatura e a profundidade são fatores com bastante peso, tanto no cálculo da velocidade como da atenuação. As ondas acústicas, ao atravessarem zonas de diferente pressão, podem ser refletidas e refratadas alterando a direção do sinal, ou seja, para além de termos que fazer cálculos de distâncias com expressões aproximadas de velocidade que variam consoante o ambiente, temos que ter em conta possíveis multicaminhos resultantes desta disposição por camadas com zonas de diferente velocidade. 4.3.7 Multicaminhos Durante a propagação da onda acústica vários fatores podem provocar o desvio da sua direção fazendo com que o mesmo sinal chegue repetido e distorcido ao destino gerando erros na deteção do sinal. Pode ter origem em reflexões e refrações quando a onda atravessa zonas de temperatura, salinidade ou pressão diferentes, resultando em múltiplos caminhos. Estes multicaminhos provocam réplicas do sinal com diferentes amplitudes que poderão induzir em erro o detetor ou até mesmo fazer com que não ocorra receção de sinal.
USBL Manufacturers ModelKongsberg Simrad HPR300, HPR410, HiPAP
Nautronix ATSIIORE LXT, Trackpoint II Plus
Sonardyne USBL
SBL Manufacturers ModelMORS(Oceano)
Nautronix(Honeywell) RS5DSonardyne SBL
Market Survey Equipa F - 2014/2015
28
Figura 19 - Exemplo de multi-caminhos
Podemos desde já antever grandes ocorrências deste fenómeno para a aplicação deste sistema num tanque ou piscina, uma vez que vai haver grande reflecção das ondas acústicas nas paredes.
4.4 Observações Comparando as diferentes abordagens ao problema verifica-se que qualquer uma das anteriores poderia ser uma boa solução. No entanto, no que toca à relação complexidade/preço, a equipa identifica as hipóteses de localização por ondas EM e pelo método Ultra Short Baseline como as mais concretizáveis. A primeira destaca-se pela elevada taxa de transferência de dados, mas é pouco explorada e documentada devido à sua dificuldade de propagação na água. Já a segunda prima por uma excelente propagação na água, mas oferece baixa taxa de transferência de dados.
Market Survey Equipa F - 2014/2015
29
5. Localização à Superfície Aquática Uma das componentes do sistema requerido é a possibilidade de localização à superfície de um tanque de água num ambiente indoor. Este tem como objetivo identificar e monitorizar a localização de um ou mais corpos em estudo (i.e. submarino, embarcação, entre outros) à superfície da água do tanque que se encontra no laboratório I-108. Para esta finalidade, existem hoje em dia já algumas tecnologias capazes de cumprir estes objetivos, variando entre si em precisão, alcance, complexidade, funcionalidades, custo, entre outros. Como tal, serão apresentadas breves descrições dessas tecnologias, abordando-se as suas principais caraterísticas, limitações, vantagens e desvantagens, por forma a possibilitar uma escolha mais apropriada para a solução do problema. Após uma pesquisa, encontraram-se algumas tecnologias possíveis de implementar, sendo estas: RFID (ativo ou passivo), Wi-Fi / WLAN, UWB, Bluetooth, Ultrassons, Localização Ótica (baseado em Visão) e Campos Magnéticos.
5.1 Técnicas de Localização São várias as técnicas existentes para determinação da posição de um objeto em ambientes interiores, dependendo as mesmas dos meios em que serão utilizados. Uma das técnicas mais básicas consiste em posicionamento por identificação localizada. Sabendo a localização de vários nodos da rede, ao ser identificado um objeto num dado nodo, determina-se uma posição aproximada do objeto. Assim, a precisão desta técnica depende essencialmente da disposição espacial e número de nodos, resultando numa precisão muito baixa, na ordem de alguns metros, e um alcance igualmente limitado pelo curto alcance dos nodos de posicionamento [5]. Uma das tecnologias mais usada com esta técnica é a RFID. O posicionamento geométrico é uma técnica que calcula a posição do objeto através da medição de relações geométricas (triangulação, trilateração, multilateração) entre o objeto e os nodos de posicionamento. Alguns exemplos típicos são o tempo de chegada (Time of Arrival), diferença de tempo de chegada (Time Difference of Arrival) e ângulo de chegada (Angle of Arrival), podendo-se usar um destes tipos de dados ou combinações dos mesmos. Esta técnica é amplamente utilizada com tecnologias como o UWB (Ultra Wide Band), lasers e ultrassons. Apesar de mais complexa, envolver maiores custos, mais infraestruturas e uma fonte energética no objeto, esta técnica permite uma maior precisão na determinação da localização. Ainda assim, a precisão é da ordem do metro ou até um máximo de 10 cm, no caso do UWB. Outra técnica amplamente usada em ambientes robóticos e em sistemas de vigilância e segurança baseia-se no processamento de imagem. Esta técnica, dada a sua natureza, aplica-se exclusivamente a sistemas baseados em sensores óticos e será abordada posteriormente, no capítulo 5.7 Localização Baseada em Visão.
5.2 RFID A tecnologia de RFID é uma das tecnologias mais usadas em todo o mundo com várias aplicações na vida real, desde a prevenção de furtos, até localização de animais perdidos. Esta pode dividir-se em duas categorias: passiva e ativa. As principais diferenças entre as duas são que a passiva, apesar de ser mais eficiente em termos de custo e simplicidade de implementação, só possibilita a localização presencial, indicando apenas se o objeto está ao alcance do leitor RFID, o que impossibilita uma métrica precisa. O RFID ativo tem como desvantagens ser mais complexa, envolver mais custos e requerer uma fonte de alimentação no identificador (no objeto que se pretende localizar). Por outro lado, através da intensidade do sinal de resposta do identificador é possível estimar a posição do

Market Survey Equipa F - 2014/2015
30
mesmo, permitindo uma maior precisão na localização e conseguindo-se um maior alcance. Verifica-se que o RFID ativo tem um alcance na ordem das dezenas ou mesmo uma centena de metros, enquanto o RFID passivo limita-se a 3 metros de alcance. De uma forma geral, a tecnologia ativa permite uma precisão de até pouco menos de 1 metro, mas requer uma vasta rede de sensores de referência, implicando um custo elevado.
5.3 Ultra Wide Band Sistemas baseados nesta tecnologia mais recente surgem de estudos de melhoramento de sistemas de localização baseados em redes de comunicação móveis. Estes últimos apresentam tipicamente um nível de precisão extremamente limitado (na ordem das centenas de metros) e é neste contexto que surgem os sistemas baseados em UWB, que permitem uma maior precisão (na ordem de alguns metros) com menores consumos energéticos e custos de implementação. A Figura 20 ilustra um exemplo da estrutura do sistema de posicionamento em interiores desta tecnologia, que consiste em quatro transmissores fixos e um recetor móvel que adquire os sinais emitidos pelos emissores e, posteriormente, processa os sinais de forma a determinar a sua própria localização relativamente aos transmissores [6] recorrendo a técnicas de multilateração, de forma análoga à explorada no capítulo 4.2.1 Localização por EM. Esta tecnologia não permite uma localização muito precisa (precisão máxima de um decímetro) e implica um recetor com capacidade de processamento e respetiva fonte de energia elétrica no próprio objeto a localizar.
5.4 Wi-Fi / WLAN Os sistemas baseados em tecnologia de Wireless Local Area Network (WLAN) também podem ser usados para a localização em espaços interiores pela análise da intensidade e atraso de sinais (trilateração/multilateração). Devido ao seu amplo uso em todo o mundo, é uma das tecnologias com melhores infraestruturas. Também é conhecida pela sua boa cobertura em espaços interiores e pela facilidade de deteção da rede. Apesar do seu uso ser alargado, também depende fortemente das infraestruturas e do alto consumo energético que lhe é inerente. Existem alguns desenvolvimentos nesta área para aplicações em localização de pessoas em escritórios ou edifícios, mas para além da complexidade na determinação de posição, só é capaz de adquirir precisões, em média, na ordem dos 2 metros.
5.5 Bluetooth A tecnologia Bluetooth é mais usada para transferência de dados, mas tem mínimas aplicações no campo da localização. É uma tecnologia de baixo consumo energético, conhecida pela sua portabilidade e que consegue melhores precisões que algumas tecnologias de localização, com recurso à trilateração ou multilateração. Segundo [7], consegue precisões entre 0,1 e 0,4 metros para distâncias entre 0,5 e 4 metros, respetivamente. Apesar destas características, é uma tecnologia que requer algum investimento em aparelhos móveis compatíveis e tem uma fraca localização de sinal, facilmente suscetível a interferências externas.
Figura 20 - Disposição dos componentes do sistema de posicionamento por UWB
(figura retirada de [10])
Market Survey Equipa F - 2014/2015
31
5.6 Ultrassons Os sistemas ultrassónicos distinguem-se pela sua capacidade de estimar localizações com uma precisão bastante elevada a baixos custos. Essa elevada precisão deve-se principalmente à relativa baixa velocidade de propagação das ondas ultrassónicas no ar, possibilitando um cálculo muito preciso do tempo de voo (Time of Flight). Ainda assim, os sistemas mais comuns deste tipo usam, para além de um sinal ultrassónico para determinar o tempo de voo, um sinal de radiofrequência (RF), emitido sincronizadamente, para estimar com elevada precisão temporal a distância entre o transmissor e o recetor com base na conhecida velocidade de propagação do som no ar. Infelizmente, a inclusão deste subsistema RF para propósitos de temporização de referência resulta num acréscimo significativo de custo, dimensões, consumos energéticos e complexidade do sistema. Há outras abordagens a serem estudadas com ultrassons que, com algoritmos mais ou menos complexos e o recurso a várias técnicas, entre as quais algumas das já referidas anteriormente (diferença de tempo de chegada, ângulo de chegada, etc.), permitem um posicionamento bastante preciso sem recurso à tecnologia RF [8]. No entanto, estes sistemas são bastante complexos e os testes foram feitos num ambiente, relativamente, pequeno. Além disso, devido à baixa velocidade das ondas ultrassónicas, é expectável que o movimento do objeto em estudo induza maiores erros na aquisição da sua posição. Um exemplo bem conhecido da tecnologia ultrassónica é o Sistema de Apoio à Localização Críquete [9], com a qual é possível usar componentes pequenos e económicos que permitem determinar localizações em áreas interiores com uma precisão de até 30 centímetros (1 pé quadrado).
5.7 Localização Baseada em Visão Uma imagem consiste, essencialmente, numa matriz de intensidades, obtida por um conjunto de sensores de luminosidade dispostos em matriz no interior da câmara de vídeo. A possibilidade de atribuir a uma máquina a capacidade de visualizar e interpretar o mundo que a rodeia, criando uma representação do mundo real a partir de imagens e respetivo processamento, designa-se por Visão por Computador. Esta tecnologia tem como objetivo adquirir, processar e analisar imagens para se extrair informação que se considere necessária. Com recurso a câmaras de vídeo, infravermelhos ou ultravioleta, é possível interpretar uma imagem ou sequência de imagens e, com base em pontos de referência bem identificados, (geralmente com uma etiqueta visual – padrão e/ou côr distintos) aplicar uma sequência de operações por forma a determinar a posição de um dado objeto identificado na imagem. Esta forma de localização é muito distinta dos outros métodos abordados, uma vez que a posição do objeto é determinada com base em algoritmos de filtragem, transformação de perspetiva da imagem, etiquetagem e obtenção de características. Esta técnica é bem viável em ambientes interiores desde que se garanta que não há obstáculos na linha visual entre o sensor ótico e o objeto em estudo e entre esse e as referências visuais. Outro fator importante reside na resolução do dispositivo de aquisição de imagem – para uma determinada precisão, quanto maior a área a monitorizar, maior deverá ser a resolução. Trata-se de uma forma muito mais intuitiva de localização, capaz de alta resolução e de atingir precisões na ordem dos milímetros [10] e [11], em tempo real. Em termos de equipamento, requer uma câmara capaz de adquirir imagem e uma unidade de processamento (geralmente um computador). Naturalmente, dependendo da qualidade e detalhe necessários na aquisição de imagem, as câmaras têm um custo variável, mas geralmente elevado e é necessário um elevado poder de processamento por parte do sistema, para que seja capaz de ter uma alta taxa de atualização.

Market Survey Equipa F - 2014/2015
32
5.8 Campo Magnético Os dispositivos móveis de hoje em dia encontram-se frequentemente equipados com sensores magnéticos embutidos (bússola magnética). Os sistemas magnéticos aproveitam este facto para, em conjunto com uma série de bobines magnéticas corretamente dimensionadas e posicionadas em locais conhecidos, permitirem a localização do próprio dispositivo móvel, por meio das correntes eletromagnéticas, geradas no mesmo. Desta forma, verifica-se que este sistema requer, para além do próprio dispositivo móvel ou sensor magnético equivalente com capacidade de processamento de dados, algum investimento em material inerente ao funcionamento do sistema, nomeadamente as bobines, que têm uma dimensão considerável de 0,5 metros de diâmetro. Como verificado em [12], este sistema tem uma precisão muito variável com a distância, desde uma precisão entre 0,5 e 1 metros para distâncias acima de 5 metros e entre 0,5 e 0,2 metros para curtas distâncias, não sendo dos sistemas mais precisos entre os estudados. De qualquer forma, é um sistema relativamente simples, ainda que bastante suscetível a perturbações externas de origem eletromagnética.
5.9 Comparação das Tecnologias Apresentadas Com base nas descrições apresentadas das várias tecnologias existentes no mercado apresenta-se a tabela 15 que sintetiza os aspetos mais relevantes de cada tecnologia para comparação.
Tabela 15 - Comparação das tecnologias para localização à superfície aquática
No presente caso de estudo do sistema de instrumentação de um tanque, mais concretamente neste subsistema de localização à superfície, é previsível que a precisão seja um fator crítico e que o alcance máximo seja igual ou superior à dimensão de uma piscina olímpica. Outro fator determinante para que o sistema seja implementável em variados tipos de embarcações, é o uso de sistemas que requeiram uma fonte de energia na própria embarcação, uma vez que esta, tendo em conta a escala do problema, pode não estar disponível ou não ser fisicamente implementável em determinados tipos de embarcações. A solução referente à utilização de um sensor ótico e com recurso a um software de processamento de imagem é a que apresenta maior viabilidade para o desafio em questão, uma vez que tem um custo de implementação reduzido e permite a identificação de mais do que um objeto. Além disso, a sua precisão é muito elevada, embora dependa da distância do sensor ao objeto e das perturbações, as quais são facilmente filtradas. Isto deve-se ao facto de se tratar de uma localização em ambiente controlado.
Market Survey Equipa F - 2014/2015
33
6. Referências
[1] NASA, “NASA,” 10 10 2014. [Online]. Available: http://www.grc.nasa.gov/WWW/k-12/airplane/pitot.html. [Acedido em 10 10 2014].
[2] “The Differential Pressure Flow Measuring Principle (Pitot tube),” Endress+Hauser, 17 10 2014. [Online]. Available: https://www.youtube.com/watch?v=D6sbzkYq3_c&index=32&list=PLFD0722A576981F74. [Acedido em 17 10 2014].
[3] “USGS,” 10 10 2014. [Online]. Available: http://water.usgs.gov/edu/streamflow2.html. [Acedido em 10 10 2014].
[4] “Northeast Fisheries Science Center,” 10 10 2014. [Online]. Available: http://www.nefsc.noaa.gov/epd/ocean/MainPage/tilt/shtcm.html. [Acedido em 10 10 2014].
[5] Z. Deng, Y. Yu, X. Yuan, N. Wan e L. Yang, “Situation and Development Tendency of Indoor Positioning,” Março 2013. [Online]. Available: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=6488829. [Acedido em Outubro 2014].
[6] J. Xu, X. Lu, H. Wu, Y. Bian, C. Wang, Y. Bai e J. Wang, “Design and Implementation of Channel Estimation and Equalization of Indoor Positioning System Based on UWB,” 2009. [Online]. Available: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=5288208. [Acedido em Outubro 2014].
[7] T. Fernandes, “Indoor Localization Using Bluetooth,” [Online]. Available: http://paginas.fe.up.pt/~prodei/dsie11/images/pdfs/s5-4.pdf. [Acedido em Outubro 2014].
[8] M. M. Saad, C. J. Bleakley, T. Ballal e S. Dobson, “High-Accuracy Reference-Free Ultrasonic Location Estimation,” Junho 2012. [Online]. Available: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=6151142&tag=1. [Acedido em Outubro 2014].
[9] N. B. Priyantha, A. Chakraborty e H. Balakrishnan, “The Cricket Location-Support System,” Agosto 2000. [Online]. Available: http://nms.lcs.mit.edu/papers/cricket.pdf. [Acedido em Outubro 2014].
[10] D. Xu, L. Han, M. Tan e Y. F. Li, “Ceiling-Based Visual Positioning for an Indoor Mobile Robot With Monocular Vision,” Maio 2009. [Online]. Available: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=4752770. [Acedido em Outubro 2014].
[11] J. Yun, E. Lyu e J. Lee, “Image-Based Absolute Positioning System for Mobile Robot Navigation,” 2006. [Online]. Available: http://link.springer.com/content/pdf/10.1007%2F11815921_28.pdf.
[12] J. Blankenbach, A. Norrdine e H. Hellmers, “A robust and precise 3D indoor positioning system for harsh environments,” Novembro 2012. [Online]. [Acedido em Outubro 2014].
[13] “ATI,” 10 10 2014. [Online]. Available: http://www.ati-ia.com/Library/documents/ATI_FT_Catalog.pdf. [Acedido em 10 10 2014].
[14] “kistler,” 10 10 2014. [Online]. Available: http://www.kistler.com/pt/en/category/Sensors+and+Transmitter/Force/PSEFO/?reload=true . [Acedido em 10 10 2014].
Market Survey Equipa F - 2014/2015
34
[15] “Strainsense,” 10 10 2014. [Online]. Available: http://www.strainsense.co.uk/downloads/suppliers/meas/force_torque/FC22.pdf. [Acedido em 10 10 2014].
[16] Freescale, “Freescale,” 10 10 2014. [Online]. Available: http://www.freescale.com/files/sensors/doc/data_sheet/MPXV7002.pdf. [Acedido em 10 10 2014].
[17] “johnsoncontrols,” 10 10 2014. [Online]. Available: http://cgproducts.johnsoncontrols.com/met_pdf/125490.pdf. [Acedido em 10 10 2014].
[18] O. M. Curet, N. A. Patankar, G. V. Lauder e M. A. MacIver, “Aquatic manoeuvering with counter-propagating waves: a novel locomotive strategy,” [Online]. Available: http://royalsocietypublishing.org/content/8/60/1041.
[19] T. Benson, “Pitot-static tube,” [Online]. Available: http://www.grc.nasa.gov/WWW/k-12/airplane/pitot.html.
[20] “Force Measurement,” [Online]. Available: http://www.mfg.mtu.edu/cyberman/quality/metrology/force.html.
[21] A. I. Automation, “Multi-Axis Force / Torque Sensors,” [Online]. Available: http://www.ati-ia.com/products/ft/sensors.aspx?campaign=ims.
[22] “Fish Robotics, Biomimetics & Mechanical Design,” [Online]. Available: http://www.people.fas.harvard.edu/~glauder/FishRoboticsLauderHarvard.htm.
[23] “Marine Hydrodynamics Laboratory (MHL),” [Online]. Available: http://name.engin.umich.edu/facilities/mhl/.
[24] “Water tunnel (hydrodynamic),” [Online]. Available: http://en.wikipedia.org/wiki/Water_tunnel_(hydrodynamic).
[25] M. Murphy, “Towing tank,” [Online]. Available: http://www.nrc-cnrc.gc.ca/eng/solutions/facilities/marine_performance/towing_tank.html.
[26] P. Morris, “Computational Fluid Dynamics Simulation and Wind Tunnel Testing,” [Online]. Available: http://www.archaid.org/wp-content/uploads/2012/08/ARC_8034_-_Philip_Morris_Dissertation_-_A8022325_-_20121.pdf.
[27] R. Smith, “Wind Tunnels and CFD,” 2008. [Online]. Available: http://www.symscape.com/blog/wind-tunnels-and-cfd.