-
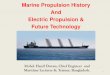
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 1
1.0 INTRODUCTION
Diesel-Electric Propulsion (DEP) systems is beneficial in
several ship applications with a varying velocity profile, such as
supply vessels, floating production vessels, drill-ships,
shuttle-tankers, ice-breakers, naval ships and cruise liners. The
basic idea of DEP systems is to replace the main diesel propulsion
engines with electric motors, and split the power production into
several smaller diesel-generators (DG). Electrical motors can be
designed with a very high efficiency throughout the whole range of
operation with respect to both speed and power outputs, in contrast
to the diesel engine that has a clear peak in efficiency around its
nominal working point.
Powering and performance have always been the key aspects in the
design process of any vessel. Small crafts in particular are often
either produced and run on tight budgets or designed under
consideration of maximum performance. Scaled model testing in the
towing tank is the most accurate method available of almost any
vessel to obtain the vessel resistance. It has the advantage of
providing a definitive answer compared to the tested models drag
under repeatable constraints, as well as giving the opportunity of
studying flow over the hull. The downside is the amount of time and
money involved in producing and testing models at the required
levels of accuracy, especially if any kind of optimisation process
is involved. This generally leaves this method out of reach for the
average small boat designers; it is only commonly used in a
particularly important or novel project for an initial or final
check of a hull form design. Computational fluid dynamics is a
similar story with a need for a vast outlay in capital and time
required to achieve the levels of accuracy needed to make the
process useful. Therefore regression based methods will be used for
this project.
Main advantages of DEP system are as follows: Improved life
cycle cost by reduced fuel consumption and maintenance, especially
where
there is a large variation in load demand. By running a
specified number of DG at optimum for every load condition, the
overall fuel consumption is reduced compared to conventional diesel
propulsion, even including losses due to the additional electrical
link;
Reduced vulnerability to single failure in the ship system and
possibility to optimise loading of prime movers (diesel generator
or gas turbine);
Higher flexibility in terms of engine room arrangement as the
DEP system takes less space, and the diesel generators could be
placed on any suited place. This implies the possibility of noise
reduction, and to use the engine room arrangement to influence the
ship stability. As compared to diesel engine with the same rated
power, the electrical motor is far quieter;
Improved manoeuvrability by utilizing azimuthing/podded
propulsion for faster response in manoeuvring; and
Simplified maintenance. Since with optimal running of DG, the
need for maintenance decreases and by using several DG, maintenance
can be performed for one generator set while maintaining almost
normal operation.
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 2
These advantages should be weighted up against the present
penalties, such as: Increased investment costs. However, this is
continuously subject for revisions, as the cost
tends to decrease with increasing number of units manufactured;
Additional components (electrical equipment generators,
transformers, drives and
motors/machines) between prime mover and propeller increase the
transmission losses at full load; and
For operational and maintenance personnel, a higher number and
new type of equipment are involved and therefore, training are
required.
High availability of power, propulsion and thruster
installations, as well as safety and automation systems, are the
key factors in obtaining maximum operation time for the vessel.
1.1 Scope of project This project focused on diesel-electric
propulsion. The principal aim of the project is to develop a
software program for the design of marine power system for DEP,
compromising of a diesel engine as the prime mover powering the
diesel generator to the electrical motors driving the propeller
shaft. The types of propulsor in the propulsion system were
excluded from this project. The software is developed by dividing
the project into eight stages:
1. Limitation check for Holtrop and Lahtiharju resistance
prediction algorithm; 2. Resistance prediction using Holtrop
method; 3. Resistance prediction using Lahtiharju method; 4.
Required power for Generators and electrical motors; 5. Generators
selection; 6. Fuel consumption analysis; 7. Range and Endurance
analysis; and 8. Plots.
1.2 Objectives The main objective is to develop a marine power
and propulsion computer program in LabVIEW. When given ship
resistance information, perhaps through regression based methods
such as Holtrop and Lahtiharju or known curves, this analysis tools
will be capable of exploring power options for diesel generators or
electrical motors. Fuel consumption, range and endurance analysis
will be presented based on the selected generator. The program will
determine a solution that is the best match to the ship operating
profile.
1.3 Research Methodology
For the first half of the project, the research work began with
the understanding and familiarization of the background and
conducting literature review on the ship resistance fundamental and
theory, methods for ship resistance predictions as well as
background knowledge of diesel-electric propulsion. All the
background information is collected from past research papers on
diesel-electric propulsion and regression based methods and ship
resistance books.
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 3
After conducting literature review, mathematical models of the
software was created in order for the software to be developed. For
regression based methods, Holtrop and Lahtiharju were chosen for
this research. Numerical examples from the Holtrop and Lahtiharju
papers were used to verify with the software developed. After that,
R/V G.O. Sars is used for the final verification to validate the
required power for the diesel generators and electrical motors from
the ship specifications. At the data analysis stage, it will be
presenting the plots in LabVIEW in order for future users to
optimize the full usage of the software. Towards the last stage of
the project, it will be entirely project write-up. The flowchart of
the research methodology as described is shown in Figure 1-1.
Figure 1-1: Flowchart of the research methodology
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 4
1.4 Literature Review
Electrical installations are present in any ship, from powering
of communication and navigation equipment, alarm and monitoring
system, running of motors for pumps, fan or winches, to high power
installation for electric propulsion
Electric propulsion is an emerging area where various competence
areas meet. Successful solutions for vessels with electric
propulsion are found in environments where naval architects,
hydrodynamic and propulsion engineers, and electrical engineering
expertise cooperate under constructional, operational, and
economical considerations. Optimized design and compromises can
only be achieved with a common concept language and mutual
understanding of the different subjects. It is the aim to give
engineers with marine competence and background the necessary
understanding of the most important electro-technical subjects used
in design and configuration of ships with electric propulsion.
The concept of electric propulsion is not new; the idea
originated more than 100 years ago. However, with the possibility
to control electrical motors with variable speed in a large power
with compact, reliable and cost-competitive solutions, the use of
electrical propulsion has emerged in new application areas during
the 80s and 90s.
Electric propulsion with gas turbine or diesel engine driven
power generation is used in hundreds of ships of various types and
in a large variety of configurations. Installed electric propulsion
in merchant marine vessels was in 2002 in the range of 6-7GW, in
addition to a substantial installation in both submarine and
surface war ship applications.
At present, electric propulsion is applied mainly in various
types of ships: cruise vessels, ferries, DP drilling vessels,
thruster assisted moored floating production facilities, shuttle
tankers, cable layers, pipe layers, icebreakers and other ice going
vessels, supply vessels and war ships. There is also a significant
on-going research and evaluation of using electric propulsion in
new vessel designs for existing and new application areas (Adnanes,
2003).
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 5
1.4.1 Resistance Prediction Methods
In the industry, there are many techniques as shown in Figure
1-2, which can be used in determining ship resistance.
Figure 1-2: Ship resistance evaluation methods and examples
(Carlton, 2007)
Model testing method is the most widely used and applied among
others since it uses models with similar characteristic to the ship
and applicable to any kinds of ships. Meanwhile, the two other
methods are effective and used for prediction and can be used for a
ship that has similar particulars to such a group. However,
numerical methods are more time effective compared to
model-testing. Table 1-1 and Table 1-2 show the methods available
for planning hull and displacement ships.
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 6
Table 1-1: Methods for planning hulls (Carlton, 2007) Savitsky
(Pre-planning)
This algorithm is useful for estimating the resistance of a
planning hull before it gets onto the plane; i.e. its pre-planning
resistance.
Savitsky (Planning) Used for estimating the resistance of
planning hulls when in the planning speed regime.
Blount and Fox (Planing)
Used for estimating the resistance of planning hulls when in the
planning speed regime. The algorithm is based on the Savitsky
planning method with improvements to the algorithm at hump speed,
the speed at which the vessel just begins to plane. The method is
considered superior to the Savitsky planning method for vessels
that have varying deadrise angles in the afterbody, or has a
varying beam in the afterbody (i.e. not prismatic).
Lahtiharju Used for estimating the resistance of planning hulls
when in the planning speed regime.
Wyman
A universal formulation used for calculating the resistance of
hull forms in both planning and displacement modes. The original
method was set out by Wyman results in an engine power being
calculated. As such, for Hullspeed to accurately predict the hull
resistance, an overall efficiency must be added in the efficiency
dialog. The overall efficiency accounts for losses between the
power developed at the engine (brake power) and the effective power
(hull resistance).
Table 1-2: Methods for displacement ships (Carlton, 2007)
Holtrop This algorithm is designed for predicting the resistance
of tankers, general cargo ships, fishing vessels, tugs, container
ships and frigates.
Compton This algorithm is designed for resistance prediction of
typical coastal patrol, training or recreational powerboat type
hull forms with transom sterns operating in the displacement and
semi-planning regimes.
Fung
This algorithm is applicable for resistance prediction of
displacement ships with transom stern hull forms (generally used
for larger vessels than Compton). The regression is based on data
from tests on 739 models at the David Taylor model basin and
consists over 10 000 data points, Fung and Leibman (1995).
van
Ortmerssen Useful for estimating the resistance of small ships
such as trawlers and tugs.
Series 60 Used for estimating the resistance of single screw
cargo ships.
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 7
1.4.2 Holtrop and Mennen Resistance Prediction Algorithm
The mathematical model first made its appearance in 1977. This
was followed a year later by an improved model which made allowance
for bulbous bows and an improvement in estimating resistance of
large waterplane area coefficient ships. The model was then
extended in order to improve the power prediction of ships with a
high block coefficient and a low length breadth ratio and slender
naval ships (Holtrop & Mennen, 1982). Despite this, predictions
for high-speed craft (Fn > 0.5) were often incorrect and in an
attempt to rectify this, the data sample was extended to include
the Series 64 hull forms and then re-analyzed (Holtrop, 1984). The
1982 mathematical model was developed from 191 random model
experiments and full-scale data, which increased to 334 for the
1984 model.
1.4.3 Lahtiharju Resistance Prediction Algorithm In an attempt
to extend existing series to higher block coefficients and beam
draught ratios, the VTT Ship Laboratory Technology Research Center
of Finland carried out tests on a series of four round bilge and
two hard chine models based on the NPL parent form. The results of
these tests together with the NPL series data, the SSPA tests on
sma1l fast displacement vessels and the results of existing VTT
tests on suitable models were statistically analysed. In developing
the regression equations, a total of 65 round bilge and 13 hard
chine models were used. Separate equations were developed for the
round bilge and for the hard chine vessels, however; only the round
bilge method is applicable to this study.
1.4.4 Main Components of Diesel-Electric Propulsion
Prime Mover The source for power is most often a generator set
driven by combustion engine which is fuelled with diesel or heavy
fuel oil. Occasionally one can find gas engines, and also gas
turbines, steam turbines or combined cycle turbines, especially for
higher power levels, in light high-speed vessels, or where gas is a
cheap alternative (e.g. waste product in oil production, boil-off
LNG carriers, etc.) In a diesel-electric propulsion system, the
diesel engines are normally medium to high-speed engines, with
lower weight and costs than similar rated low speed engines that
are used for direct mechanical propulsion. Availability to the
power plant is of high concern and in a diesel electric system with
a number of diesel engines in a redundant network; this means high
reliability but also sophisticated diagnostics and short repair
times (Adnanes, 2003).
Generators The majority of new buildings and all commercial
vessels have an AC power generation plant with AC distribution. The
generators are synchronous machines, with a magnetizing winding on
the rotor carrying a DC current, and a three-phase stator winding
where the magnetic field from the rotor current induces a
three-phase sinusoidal voltage when the rotor is rotated by the
prime mover. The frequency f (Hz) of the induced voltages is
proportional to the rotational speed n (RPM) and the pole number p
in the synchronous machine:
(1.1) 2 60p nf =
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 8
1.4.5 Past Research
For a marine propulsion system design, the number of potential
Power & Propulsion (P&PS) solutions is increasing all the
time as new types of mechanical and electrical technologies become
available. The different options and the complexities of vessel
operations lead to a large number of variables to assess.
In May 2010, BMT Defence Services developed a marine P&P
analysis tool, Ptool, to allow designers to establish the vital
P&PS parameters and to identify the best sub-sets of solutions
quickly with the least input information. Ptool uses a library of
P&PS equipment data to reduce the need for initial data. A ship
definition file contains much of the bounding input data.
The various P&PS options are defined in separate files to
allow unique configuration and equipment set-ups to be analysed.
Ptool provides graphic output and report generation of key data
parameters. These outputs include budget estimates of physical and
cost information for the purposes of comparison and cost benefit
analysis.
The approach is therefore one of matching the propulsion
solution to the ships operating speed profile. Ptool is most
valuable for ships with varying electrical loads across ships
speeds and those with a wide range of operating speeds.
Ptool make use of a library of generic engine, motor, converter
and propulsor data to reduce the date entry required. Data from
several different diesel and gas turbine engine suppliers is
recorded. This is the specific fuel and lub oil consumption for an
engine as well as the NOx and smoke emission levels.
Performance curves for a range of propulsor devices are also
recorded in a library for easy option definition. The electric
motor and convertor technologies are defined by generic performance
characteristics such as their operating efficiency over speed or
load conditions (Buckingham, 2010).
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 9
1.5 Outline of Thesis
Chapter 2.0 presents the resistance and propulsion background
information and formulas involved. Two regression based methods
Holtrop and Lahtiharju were selected and the formulas and
limitations were presented. The mathematical models of Holtrop and
Lahtiharju are also presented in this chapter.
Chapter 3.0 presents the background information of
diesel-electric propulsion and each component in it. The
mathematical model of DEP is also presented.
Chapter 4.0 shows the software development of this project. The
rationale and structures are also presented in this chapter.
Chapter 5.0 shows the testing and analysis of the software.
Validation of R/V G.O. Sars is shown in this chapter to prove the
accuracy of the software developed.
Chapter 6.0 discusses about the project, accuracy of regression
based methods, limitations of the software and the
verifications.
Finally in Chapter 7.0 and 8.0 presents concluding remarks and
future works are drawn.
Chapter 9.0 shows the bibliography and works cited.
Appendix A presents the ship specifications of R/V G.O. Sars and
SV290.
Appendix B presents the block diagram of the VIs developed.
Appendix C presents the user manual for the software.
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 10
2.0 RESISTANCE AND PROPULSION THEORY
This chapter describes the basic principles and theory of
resistance of a ship that includes frictional, pressure and wave
resistance, and the effects of these resistances. There are also
two resistance prediction algorithms that are used in the industry
to predict the resistance of a ship based on the operating profile
or ship coefficients: Holtrop and Lahtiharju.
Translation of a hull through water requires a force. This force
is called the resistance: it is the force that is required to tow
the ship at a specified speed (without the propulsor). The thrust
developed by the propulsion system has to overcome the resistance
of the ship. Figure 2-1 shows the ship resistance and its
breakdown. The total resistance consists of three components:
Frictional resistance is the force that is the resultant of
tangential forces acting on the hull as a result of the boundary
layer along the hull;
Pressure resistance is the force that is the resultant of the
normal forces on the hull, due to the difference in the pressure in
front of and behind the moving ship. The pressure losses become
significant when the boundary layer separates from the hull at the
stern of the ship; and
Wave resistance is the drag that is the result of waves
generated by the moving ship. The kinetic and potential energy in
the waves has to be generated by the propulsion system.
Figure 2-1: Components of ship resistance (Carlton, 2007)
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 11
Figure 2-2: Different types of ships resistance speed curve
(Stapersma & Woud, 2002)
Figure 2-2 shows various resistance-speed relations. For higher
speeds, the resistance curve will be steeper; curves of type (2)
may be encountered. Planning craft and swath (small waterplane area
twin hull) ships may have curves that are more like (3).
2.1 Hull Resistance
Translation of a hull through water requires a force. This force
is called the resistance. It is the force that is required to tow
the ship at a specified speed (without the propulsor). The thrust
developed by the propulsion system has to overcome the resistance
of the ship. The total resistance consists of three components:
Frictional or viscous resistance is the force that is the
resultant of the tangential forces acting on the hull as a result
of the boundary layer along the hull;
Form or pressure resistance is the force that is the resultant
of the normal forces on the hull, due to the difference in the
pressure in front of and behind the moving ship. The pressure
losses become significant when the boundary layer separates from
the hull at the stern of the ship; and
Wave resistance is the drag that is the result of waves
generated by the moving ship. The kinetic and potential energy in
the waves has to be generated by propulsion system.
(2.1)
It is often acceptable to assume that the ships resistance is
roughly proportional to the square of ship speed vs relatively low
speeds.
(2.2)
Total resistance R Frictional Pressure Wave Resistance= + +
21 SR c V=
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 12
The power required to tow the ship at ship speed vs with
resistance R is the effective towing power PE. Using the assumed
proportionality of resistance and ship speed squared, effective
power is as a first approximation proportional to the cube of ship
speed.
(2.3)
(2.4)
2.1.1 Non-dimensional Resistance CE
In hydromechanics, total resistance is usually written in
non-dimensional form CT.
(2.5)
where = density of water (kg/m3) As=Wetted surface of the hull
(m2) Usually, the wetted surface As is not readily available.
Therefore, a more practical coefficient is used: Specific
resistance CE.
(2.6)
By defining specific resistance CE, a ship is assigned a value
that indicate resistance characteristic depending, amongst others
on ship size, speed and hull form.
The Reynolds number Re and the Froude number Fn represent the
viscous (friction) and dynamic (waves) effects on resistance (and
power), respectively.
Therefore, the dependency of CE on the Reynolds and Froude
numbers means that CE depends on speed and size.
2.1.2 Relationship between c1 and CE
(2.7)
(2.8)
In particular, the dependency on the Froude number means that
the propulsion power can change with speed more rapidly than is
predicted by the cube law. The cube law is only valid for low
Froude numbers (Fn=0.1-0.2).
.E sP R v=
31.E sP c v=
20.5T s sRCA v
=
1 233 3
EE
s
PCv
=
1 233 3E E sP C v=
1 23 3
1 Ec C =
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 13
2.2 Propulsion
The function of a propulsor is to deliver a thrust force T to
overcome the resistance R of the hull. The power needed to overcome
R at speed vs is the effective power PE, already defined in
equation (2.3):
The power as delivered by the propeller in water at velocity of
advance vA with useful output T is the thrust power PT (per
propeller): (2.9) Another important effect is that the velocity of
the water at the propeller does not equal the ships speed: the
entrained water in the boundary layer around the ship has a certain
forward speed. The boundary layer at the ships stern has a
considerable thickness and normally the propeller is completely
within the region where the water velocity is affected by the hulls
presence. As a result the advance velocity vA of the propeller
relative to the water is smaller than the ships vs.
The difference between ships speed and advance velocity in front
of the propeller, as a ratio of ships speed is called the wake
factor w:
(2.10)
From this definition the advance velocity as experienced by the
propeller can be expressed in terms of the ship speed: (2.11)
2.2.1 Hull Efficiency
As a result of thrust deduction and wake factor, the sum of the
thrust power PT of all the propellers does not equal the effective
power PE. The ratio of effective power to propulsive power is
called the hull efficiency H, clearly all differences between the
towed and propelled hull are contained within this factor:
(2.12)
(2.13)
2.2.2 Propeller Efficiency
In order to deliver thrust at a certain translating speed, power
must be delivered to the propeller as torque Q and rotational
speed: (2.14) The index O stands for open water and refers to the
fact that propellers normally are tested in open water tank or
tunnel. During the open water test, open water propeller efficiency
can be measured:
T AP T v=
s A
S
v vw
v
=
( )1A sv w v=
sEH
p T p A
R vPk P k T v
= =
11H
t
w =
2o p pP Q Q n pi= =
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 14
(2.15)
The open water propeller efficiency lies in the range of 0.3 for
inland ships to 0.7 for frigates. In reality, i.e. behind the ship,
the torque Mp and thus the power Pp actually delivered to the
propeller are generally slightly different as a result of the
non-uniform velocity field in front of the actual propeller.
(2.16)
The ratio between open water power (or torque) and actually
delivered power (or torque) is called the relative rotative
efficiency:
(2.17)
2.2.3 Propulsive Efficiency
It is common practice to define the total propulsive efficiency
to embrace all effects hull and propeller discussed up to now. So,
the propulsive efficiency must be defined as the quotient of the
previously defined effective power PE delivered to the hull and the
power actually delivered to all the propellers PD. The total
propulsive efficiency is defined as:
(2.18)
With the definitions of hull efficiency H, open water propeller
efficiency o, and relative rotative efficiency R the following
chain of partial efficiencies arises:
(2.19)
in which the hull efficiency can further be expressed in thrust
deduction t and wake fraction w:
(2.20)
2.2.4 Non-dimensional delivered power coefficient CD
Not only effective towing power PE but also delivered power PD
is increasing with the cube of ship speed, if it is assumed that
the total efficiency D remains almost constant at ship speeds other
than nominal ship speed, as shown by the following relations:
(2.21)
12
T Ao
O p
P T vP Q n pi
= =
2p p p p pP M M n pi= =
oR
p p
P QP M
= =
ED
D
PP
=
D H o R =
11D o R
t
w =
1 21 233 3
33 3E sED D s
D D
C vPP C v
= = =
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 15
in which the non-dimensional delivered power coefficient CD is
by definition:
(2.22)
(2.23)
2.2.5 Propeller Law
The relation between the power delivered to a propeller Pp and
shaft (or propeller) speed np is known as the propeller law. From
experience, it is known that shaft (rotational) speed is almost
linearly proportional to the ships translating speed:
(2.24)
It can be shown that the delivered power is not only
proportional to the cube of ship speed but also to the cube of
shaft speed. This is called the propeller law.
(2.25)
then:
(2.26)
That is: propeller torque is proportional to the square of the
shaft speed. There were two assumptions in the derivation of the
propeller law:
The propulsive efficiency remains constant in off-design
conditions; and Shaft speed is linearly proportional to translating
speed.
2.3 Propulsion Chain
Shaft losses are expressed in terms of shaft efficiency, which
is defined as:
(2.27)
The shaft loss typically is 0.5 to 1 percentage at nominal
power. Ps is the shaft power, i.e. the power delivered to the shaft
that is connected to a propeller and Pp is the power delivered to
the propeller.
(2.28)
2 1 23 33 3 3
D D ED
Ds s
P P CCv v
= = =
1 23 3
2 Dc C =
3p sn c v=
323 32
433
pDp s p
p p p
c nP cP v c nk k k c
= = = =
34 5 2
2p
p pp
c nM c n
npi
= =
p ps
s s
P MP M
= =
2s s p s pP M M n pi= =
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 16
Engine brake power PB is the power developed by the engine is
defined by:
(2.29)
where MB is the engine torque, e is the angular velocity of the
engine shaft and ne is the engine speed. If there is no gearbox,
brake power equals shaft power. If however, transmission includes a
gearbox, gearbox losses are expressed in terms of gearbox
efficiency, taking into account the number of engines per propeller
shaft ke:
(2.30)
i is the gearbox reduction ration indicating the ratio of engine
speed to propeller speed:
(2.31)
The gearbox losses are moderate (1% to 2%) for one-step
reduction gearboxes in medium-speed diesel installations and they
may be high (3% to 5%) for complex gearboxes with two or three
reduction stages such as currently applied in multi-engine
installations.
The total transmission efficiency is defined as the ratio of
delivered power to brake power. With the definition of shaft and
gearbox efficiency, total transmission efficiency can be written as
the product of these two.
(2.32)
To complete the power chain from the moving ship to the fuel in
the tanks, the last step is effective engine efficiency. It is
defined as the ratio of engine output and heat input:
(2.33)
Effective engine efficiency accounts for all engine losses in
the conversion of chemical energy in fuel to the mechanical energy
in the rotating output shaft of the engine.
Figure 2-3 presents the propulsion chain: the overview of powers
and efficiencies from resistance to brake powers.
2B B e B eP M M n pi= =
1s ps sGB
e B e B e e B
M nP Mk P k M n k M i
= = =
e
p
nin
=
1 1p p p sTRM s GB
e B e B s e B
P M M Mk P k M i M k M i
= = = =
Be
f
PQ =
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 17
Figure 2-3: Propulsion Chain: Overview of powers and
efficiencies from resistance to brake power (Stapersma & Woud,
2002)
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 18
2.4 Holtrop (1984/1988) One of the methods which are used to
predict the resistance of a full displacement hull form is Holtrop
1988. This algorithm is designed for predicting the resistance of
tankers, general cargo ships, fishing vessels, tugs, container
ships and frigates. However, there are some limitations for this
prediction method and will be mentioned in Section 2.4.12.
This resistance prediction method is one of the techniques
widely used in prediction of resistance of displacement and
semi-displacement vessels. Like all methods, however, this
technique is limited to a suitable range of hull form parameters.
This algorithm is designed for predicting the resistance of
tankers, general cargo ships, fishing vessels, tugs, container
ships and frigates. The algorithms implements are based upon
hydrodynamic theory with coefficients obtained from the regression
analysis of the results of 334 ship model tests.
In their approach to establishing their formulas, Holtrop and
Mennen assumed that the non-dimensional coefficient represents the
components of resistance of a hull form. It might be represented by
appropriate geometrical parameters, thus enabling each component to
be expressed as a non-dimensional function of the sealing and the
hull form.
This resistance prediction method was presented based on a
regression analysis of random models and full-scale test data. A
Froude number dependency of the form factor was introduced with the
objective to improve the accuracy of the prediction. The prediction
method was carried out as shown:
(1 )Total F APP TR W B AR R Yk R R R R R= + + + + + + (2.34)
2.4.1 Froude Number
The Froude number is a dimensionless number defined as the ratio
of a characteristic velocity to a gravitational wave velocity. For
vessel, it is an important parameter with respect to the ship drag,
or resistance, including the wave making resistance.
(2.35)
The coefficient Y as shown in Table 2-1 was varied for several
fixed values of the Froude numbers and for each Froude number a
regression analysis of the wave resistance was made in order to
match the numerical model to the measured data. In Figure 2-4, it
shows the Froude number dependency of the form factors.
Referring to Figure 2-5, the standard deviation Rm between the
total measured and calculated model resistance was used to
determine the value of Y for each Froude number analysed.
sn
VFgL
=
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 19
Table 2-1: The standard deviation of the model resistance, the
Y-values and the number data points (Holtrop, 1988)
Fn Y Rm (%) n 0.100 0.9300 3.89 123 0.125 0.9395 3.41 207 0.150
0.9513 3.83 236 0.200 0.9500 3.78 167 0.250 0.8744 4.80 172 0.300
0.7500 6.54 151 0.350 0.5625 7.40 112 0.400 0.3800 4.69 75 0.450
0.2844 3.59 60 0.500 0.2200 3.17 49 0.600 0.1000 2.87 45 0.800
0.0000 2.92 43
Figure 2-4: Froude number dependency of the form factor
(Holtrop, 1988)
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 20
Figure 2-5: The standard deviation between measured and
calculated RM is shown for various Froude numbers investigated as a
function Y (Holtrop, 1988)
2.4.2 Reynolds number
In fluid mechanics, the Reynolds number (Re) is a dimensionless
number that gives a measure of the ratio of inertial forces to
viscous forces and consequently quantifies the relative importance
of these two forces for given flow conditions and the formula is
shown as:
(2.36) where: for fresh water = 1.13910-6 m2/s for sea water =
1.18310-6 m2/s
se
V LR
=
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 21
2.4.3 Form coefficients
Form coefficients are important parameters to help compare hull
forms as well: Block coefficient is the ratio of the immersed
volume of a vessel to the product of its immersed draft, length and
beam and is shown as:
(2.37)
Midship coefficient is the ratio of the largest underwater
section of the hull to a rectangle of the same overall width and
depth as the underwater section of the hull and is shown as:
(2.38) Prismatic coefficient is the ratio of the immersed volume
of the hull to a volume of a prism with equal length to the ship
and cross-sectional area equal to the largest underwater section of
the hull (midship section) and is shown as: (2.39)
Waterplane coefficient expresses the fullness of the waterplane
or the ratio of the waterplane area to a rectangle of the same
length and breadth and is shown as:
(2.40)
2.4.4 Frictional Resistance RF
The frictional resistance RF is the major part of the total
viscous resistance of a ship. The area of the wetted surface S and
the coefficient of the frictional coefficient CF determine its
magnitude.
(2.41)
(2.42)
(2.43)
(2.44)
In the form-factor formula LR is a parameter reflecting the
length of the run according to:
(2.45) The coefficient c12 is defined as:
When T/L > 0.05:
B P MWL
C C CL B T
= =
mM
ACB T
=
PPP m
CL A
=
wWP
PP
ACL B
=
210
0.075[log ( ) 2]F
n
CR
=
20.5F S FR S V C=
(2 ) (0.453 0.4425 0.28620.003467 / 0.3696 ) 2.38 /
M B M
WP BT B
S L T B C C CB T C A C
= + +
+ +
0.924971 13 12
0.521488 0.6906
(1 ) [0.93 ( / )(0.95 ) (1 0.0225 ) ]
R
P P
k c c B LC C lcb
+ = +
+
[1 0.06 / (4 1)]R p p pL L C C lcb C= +
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 22
(2.46)
When 0.02 < T/L < 0.05: (2.47)
When T/L < 0.02: (2.48)
The coefficient c13 accounts for the specific shape of the
afterbody and is related to the coefficient Cstern according to:
(2.49)
According to Figure 2-6, the typical values of Cstern are
shown.
Figure 2-6: Typical values of Cstern (Holtrop, 1988)
2.4.5 Appendage Resistance RAPP
The appendage resistance can be determined from:
(2.50)
0.222844612 ( / )c T L=
2.07812 48.2( / 0.02) 0.479948c T L= +
12 0.479948c =
13 1 0.003 sternc C= +
220.5 (1 )APP S APP eq FR V S k C= +
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 23
Table 2-2: 1+k2 values used for streamlined flow-orientated
appendages (Holtrop, 1984)
Approximate 1+k2 values
Rudder behind skeg 1.5-2.0
Rudder behind stern 1.3-1.5
Twin-screw balance rudders 2.8
Shaft Brackets 3.0
Skeg 1.5-2.0
Strut bossings 3.0
Hull bossings 2.0
Shafts 2.0-4.0
Stabilizer fins 2.8
Dome 2.7
Bilge keels 1.4
The equivalent 1+k2 values is shown in Figure 2-6 for a
combination of appendages is determined from:
(2.51)
2.4.6 Wave Resistance RW (Fn >0.55) The wave resistance
formula was derived for the speed range Fn > 0.55:
(2.52)
(2.53)
(2.54)
(2.55)
The coefficients c2, c5, d and have the same definition for all
Froude Number: (2.56)
(2.57)
22
(1 )(1 ) APPeq
APP
k SkS
++ =
20.55 17 2 5 3 4exp[ cos( )]dW n nR c c c g m F m F = +
0.9d =
2.00977 1.406921.3346
17 36919.3 2ML
c CL B
=
0.326869 0.6053753 7.2035( / ) ( / )m B L T B=
2 3exp( 1.89 )c c=
1.5
30.56
[ (0.31 )]BT
BT F B
Ac
B T A T h=
+
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 24
(2.58)
When L/B < 12: (2.59)
When L/B > 12: (2.60)
(2.61)
When L3/ < 512: (2.62)
When 512 < L3/ < 1726.91: (2.63)
When L3/ > 1726.91: (2.64)
2.4.7 Wave Resistance RW (Fn < 0.4) (2.65)
(2.66)
When B/L < 0.11: (2.67)
When 0.11 < B/L < 0.25: (2.68)
When B/L > 0.25: (2.69)
(2.70)
(2.71)
51 0.8
( )T
M
Ac
B T C
=
1.446 0.03( / )PC L B =
1.446 0.36PC =
3.294 15 0.4 exp( 0.034 )nm c F =
15 1.69385c =
1/315 1.69385 ( / 8) / 2.36c L= +
15 0c =
RW 0.4 = c1 c2 c5 g exp[m1Fnd + m2 cos(Fn2 )]
c1 = 2223105 c73.78613(T / B)1.07961(90 iE )1.37565
c7 = 0.229577(B / L)0.33333
c7 = B / L
c7 = 0.5 0.0625L / B
iE = 1+ 89 exp[(L / B)0.80856 (1 CWP )0.30484(1 CP
0.0225lcb)0.6367 (LR / B)0.34574 (100 / L3)0.16302 ]
m1 = 0.0140407(L / T ) 1.75254(1/3 / L) + 4.79323(B / L) c16
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 25
When CP < 0.8: (2.72)
When CP > 0.8: (2.73)
(2.74) When L3/ < 512: (2.75)
When 512 < L3/ < 1727: (2.76)
When L3/ > 1727: (2.77)
2.4.8 Wave Resistance RW (0.4 < Fn < 0.55)
(2.78)
2.4.9 Additional pressure of bulbous bow near the water surface
RB
The additional resistance due to the presence of a bulbous bow
near the water surface is determined from:
(2.79)
(2.80)
(2.81)
c16 = 8.07981CP 13.8673CP2 + 6.984388CP3
c16 = 1.73014 0.7067CP
m2 = c15 CP2 exp(0.1Fn2 )
c15 = 1.69385
1/315 1.69385 ( / 8) / 2.36c L= +
15 0c =
0.55 0.40.4 0.55 0.4
(10 4)( )1.5
n W WW W
F R RR R
= +
2 3 1.5
2
0.11exp( 3 )(1 )
B ni BTB
ni
P F A gRF
=
+
0.56( 1.5 )
BTB
F B
AP
T h=
2( 0.25 ) 0.15ni F B BT SVF
g T h A V=
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 26
2.4.10 Additional Pressure Resistance of Immersed Transom Stern
RTR
In a similar way the additional pressure resistance due to
immersed transom can be determined:
(2.82) The coefficient c6 has been related to the Froude number
based on the transom immersion: When FnT < 5: (2.83)
When FnT > 5: (2.84)
FnT has been defined as:
(2.85)
2.4.11 Model-Ship Correlation RA
The model-ship correlation RA with (2.86)
describes the effect of the hull roughness and the still-air
resistance. From an analysis of results of speed trials, which have
been corrected to ideal trial conditions, the following formula for
the correlation allowance coefficient CA was found: (2.87)
When TF/L 0.04: (2.88) When TF/L > 0.04: (2.89)
260.5TR S TR V A c=
6 0.2(1 0.2 )nTc F=
6 0c =
2 / ( )nT T WPVF
gA B BC=
+
20.5A S AR V S C=
0.16 42 40.006( 100) 0.00205 0.003 / 7.5 (0.04 )A BC L L C c c=
+ +
4 /Fc T L=
4 0.04c =
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 27
2.4.12 Limitations
The Holtrop and Mennen resistance prediction algorithm is valid
for a variety of hull forms ranging from tugs to trawlers to naval
vessels. The Froude numbers will range from 0.05.to 1. However,
there are some limitations in Holtrop: The correlation factor is
constant but is calculated based on regression method within the
specified Froude number or speed ranges.
The Holtrop prediction algorithm is also favourable to certain
limits of hull dimensions. The limitations of the hull dimensions
referring to Table 2-3.
Table 2-3: Limits of applicability for Holtrop and Mennen
(Holtrop, 1984) Parameter Minimum Maximum CP 0.55 0.85 L/B 3.9 15
B/T 2.1 4.0
2.4.13 Mathematical Modelling of Holtrop Resistance Prediction
Algorithm
Figure 2-7: Mathematical Modelling of Holtrop Resistance
Prediction Algorithm
Based on the mathematical model of Holtrop as shown in Figure
2-7, user will understand the flow of the Holtrop resistance
prediction algorithm developed. The very first input of the
software will be the vessel operating profile or ship coefficients
and through the Holtrop resistance prediction algorithm, the result
will be the total resistance of the vessel and effective power.
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 28
2.5 Lahtiharju (1991) Lahtiharju is a reliable resistance
prediction method which is used to predict the resistance of a
planning hull. Extensive systematic resistance tests were carried
out with all models, including typical hard chine planning hull
form. Resistance prediction equations were developed by using
regression analysis, which was based on parameters and resistance
data if some older systematic series, the new series and suitable
models from the records (Lahtiharju, et al., 1991).
With all the models tested, the volumetric displacement Froude
number, Fn, is defined by:
(2.90)
2.5.1 Hard Chine Craft
The analysis of hard chine craft was carried out by using the
main dimensions and the resistance test results of only 13 vessels.
Thus the equation is a supplement to the Savitsky method in the
pre-planning regime. The parameters in the equation are the ratios
of main dimensions (L, B, T and ) and the ratio of transom area
AT/AX. The new formula is a second order function of Fn. The number
of variables is six.
The values of the regression coefficients and the parameters are
given in Table 2-4. Because the models in the analysis did not form
any systematic series and the number of the models was very small,
the coefficient of determination is only 0.9687. The general form
of the resistance prediction equation for hard chine craft in the
pre-planning speed regime is:
(2.91)
(2.92)
(2.93)
(2.94)
1/3S
n
VFg
=
3 62
100000 0 1 12 4
/T i i n i i ni i
R A A P A P F A P F = =
= + + +
( )2100.075
log 2F nC
R=
1/3
5
1000032.264
1.2817 10
n
n
LFR
=
( ) 2100000 2/3100000
0.5T T F A F ncorr
R R SC C C F
= +
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 29
Table 2-4: Parameters and coefficients of the resistance
equation for hard chine vessels (Lahtiharju, et al., 1991)
Coefficient = 1 i Pi Ai 0 1 -0.03546471
1 /T3 0.00129099
Coefficient = Fn i Pi Ai 2 1/3/L 0.51603410 3 (L/T)2
-0.00010596
Coefficient = Fn2 i Pi Ai 4 (L/1/3)2 -0.00090300 5 (L/1/3)3
0.00017501 6 (B/L).(AT/AX) -0.02784726
The total resistance is calculated in exactly the same way as
for round bilge vessels. At low speeds, resistance is calculated by
using the Mercies-Savitsky method. When the speed is larger than Fn
=1.8, equation (2.91) is used up to planning regime. After that,
the Savitsky equation is applied. Small experimental corrections
have been made to the Mercier-Savitsky and Savitsky methods,
because they slightly underestimate the resistance according to
previous examinations.
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 30
2.5.2 Limitations
The Lahtiharju resistance prediction algorithm is valid for
vessel speeds corresponding to displacement Froude number Fn in the
range of 1.8 to 3.3. However, Lahtiharju is favourable to certain
limits of hull dimensions, these limits are shown in Table 2-5:
Table 2-5: Limits of applicability for Lahtiharju (Lahtiharju,
et al., 1991) Type of Hull Forms Round Bilge and Hard Chine Vessels
L/1/3 4.49 to 6.81 L/B 2.73 to 5.43 B/T 3.75 to 7.54 AT/AX 0.43 to
0.995
2.5.3 Mathematical Modelling of Lahtiharju Resistance Prediction
Algorithm
Figure 2-8: Mathematical Modelling of Lahtiharju Resistance
Prediction Algorithm
Based on the mathematical model of Lahtiharju as shown in Figure
2-8, user will understand the flow of Lahtiharju resistance
prediction algorithm developed. The very first input of the
software will be the vessel operating profile or ship coefficients
and through the Lahtiharju resistance prediction algorithm, the
result will be the total resistance of the vessel and effective
power.
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 31
3.0 DIESEL-ELECTRIC POWER AND PROPULSION
This chapter deals with the diesel-electric power and propulsion
in a DEP vessel. Once the diesel generators translate mechanical
energy to electrical energy, the electrical power will be
translated from the diesel generator to a list of electrical
components like the switchboard, transformer, frequency converter
and electrical motors for propulsion. In order to determine the
power required for the diesel generator and electrical motors,
typical electrical and propeller efficiency are used in this
project. Each components of the DEP system are explained in this
chapter as well to gain an in-depth knowledge of how the DEP system
works and functions.
Figure 3-1: Three comparative concepts of a Ropax vessel showing
how space can be utilized with electric propulsion and podded
propulsion (Adnanes, 2003)
The advantages of the DEP were highlighted in the earlier
chapter. High availability of power, propulsion and thruster
installations, as well as safety and automation systems, are the
key factors in obtaining maximum operation time for the vessel. The
safety and automation system required to monitor, protect, and
control the power plant, propulsion and thruster system, becomes of
increasing importance for a reliable and optimum use of the
installation. Figure 3-1 shows the vessel layout of
diesel-mechanical, diesel-electric and pod propulsion.
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 32
The merits of electrical propulsion include the ease of control
which it provides giving an excellent manoeuvring capability
together with an ability to operate economically and for lengthy
periods at reduced speed and power. The principle disadvantage of
electrical drive has been that it is much expensive in first cost
than the geared alternative. This economic disadvantage is
compounded by the fact that the mechanical efficiency is lower,
leading to increased fuel consumption and cost. Bringing all the
electrics together in one system along with some reduction in
relative cost of electric propulsion systems have combined to
reduce the extra cost of todays electrical propulsion and it is now
the favoured system for large cruise liners, research vessels, ice
breakers, on which its many operational advantages outweigh any
residual extra cost. The differences between conventional diesel
propulsion and diesel-electric propulsion system are shown in
Figure 3-2.
Figure 3-2: Layout diagram of Conventional and Diesel Electric
Propulsion System (Adnanes, 2003)
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 33
3.1 Overview of Diesel-Electric Propulsion
The main difference between the marine and a land-based
electrical power system is the fact that the marine power system is
an isolated system with short distances from the generated power to
the consumers, in contrast to what is normal in land-based systems
where there can be hundreds of kilometres between the power
generation and the load, with long transmission lines and several
voltage transformations between them. The amount of installed power
in vessels may be high and this gives special challenges for the
engineering of such systems. High short circuit levels and forces
must be dealt with in a safe manner. The control system in a
land-based electrical power system is divided in several separated
sub-systems, while in a vessel; there are possibilities for much
tighter integration and coordination. The main components of DEP
are shown as:
Figure 3-3: Main components of Diesel-Electric Propulsion
(B&W, 2011)
The function of the electric power plant is to supply electric
power to a great diversity of electric consumers. The electric
consumers, or electrical systems, include systems that are vital to
the ships operation, and safety of crew and passengers; e.g.
lighting, communication, navigation and mission specific systems.
Because of the importance of reliable operation of these electrical
systems, regulatory bodies provide ample rules and regulations for
configuration and design of electrical power plants and their
components. Figure 3-4 shows the layout diagram of DEP.
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 34
Figure 3-4: Layout of Diesel-Electric Propulsion (B&W,
2011)
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 35
3.2 Mathematical Modelling of Diesel-Electric Propulsion
Figure 3-5: Relationship between resistance and PIN
Figure 3-6: Mathematical Model of DEP system in software
From the previous mathematical model of Holtrop and Lahtiharju,
the output will be the resistance. According to Figure 3-5, the
relationship between resistance and power are presented. So from
the calculated results, using equation (2.3), the effective power
will be generated and dividing by the assumed propeller efficiency,
PIN of the DEP system will be achieved. After that, using the
typical efficiencies in Table 3-1 and mathematical model of DEP as
shown in Figure 3-6, the software will calculate the required
generators and electrical motors power loads based on the number of
generators and electrical motors selected. The development of the
software will be discussed in Chapter 4.0.
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 36
3.3 Prime Mover
In a DEP system, the diesel engines are normally medium to
high-speed engines, with lower weight and costs than similar rated
low speed engines that are used for direct mechanical propulsion.
Most common is the use of a diesel engine to drive the generator
due to its good performance characteristics and low fuel costs.
Main electric power supply systems of 50 Hz require a prime mover
with a speed of 750, 1000 or 1500 rpm, 60 Hz-systems require 900,
1200 or 1800 rpm. High speed diesel engines need high quality
fuels, whereas engines that run 750-1000 rpm can usually operate on
cheaper heavy fuel. This gives them an advantage from a fuel cost
point of view.
Figure 3-7: Caterpillar 3512B Diesel Engine
Gas turbines are also used for electric power supply systems.
Figure 3-7 shows a Caterpillar 3512B diesel engine. It has a robust
diesel strength design prolongs life and lowers owning and
operating cost. Besides that, it has a broad operating speed range
and with a separate circuit aftercooler to provide industry-leading
ambient capability; ease-of-cooling system integration and enables
sea water cooling. A steam turbine is rarely used to drive a
generator (turbo-generator), nowadays. It has advantages though,
when the propulsion system includes a steam plant, or when
sufficient steam is generated by the energy in exhaust gases.
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 37
3.4 Diesel Generators
The generator is driven by a prime mover converts mechanical
energy to main electric energy. Manufacturers usually combine the
generator, prime mover and auxiliary systems, such as reduction
gear (if required) and lubricating oil system, to a generator
set.
Most common are AC generators. If a DC main electric system is
required, as on a submarine, AC generators will still be used in
combination with rectifiers. The type of generator (frequency,
voltage) and number of generators are determined by the electrical
load analysis, redundancy requirements and other rules and
regulations provided by regulatory bodies. For electric powers up
to 2500kW, AC generators with frequency/voltage of 50Hz/400V or
60Hz/440V (three phase) are generally installed. If the required
electric power is higher, high voltage generators are implemented
(voltage of 3.3 or 6kV). Often, the generator capacity is not given
as real power (kW) but as the apparent power (kVA), the product of
current and voltage, because the current required from the
generator determines the dimensions due to heating of the
windings.
A two-pole generator will give 60Hz at 3600 RPM, a four-pole at
1800 RPM and a six-pole at 1200 RPM.
50Hz is obtained at 3000 RPM, 1500 RPM and 1000 RPM for two,
four and six-pole machines;
A large medium speed engine will normally work at 720 RPM for 60
Hz (10 pole generator) or 750 RPM for 50 Hz networks (8 pole
generators);
The DC current was earlier transferred to the magnetizing
windings on the rotor by brushes and slip rings;
Modern generators are equipped with brushless excitation for
reduced maintenance and downtime;
The brushless excitation machine is an inverse synchronous
machine with DC magnetization of the stator and rotating
three-phase windings and a rotating diode rectifier. The rectified
current is then feeling the magnetization winding; and
The excitation is controlled by an automatic voltage regulator
(AVR), which senses the terminal voltage of the generator and
compares it with a reference value.
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 38
3.5 Electrical Motors
Electrical motors are the most commonly used device for
conversion from electrical to mechanical power and is used for DEP,
thrusters or station keeping, and other on-board loads such as
winches, pumps, fans etc. Typically, 80-90% of the loads in ship
installation are electrical motors.
An electric motor can be directly connected to the network, and
such direct-on-line (DOL) motors are normally three-phase
asynchronous, or induction motors. The asynchronous motor has a
rugged and simple design, where the three-phase stator windings are
similar to a generator stator winding. The rotor is cylindrical,
with a laminated iron core and a short-circuited winding similar to
the damper winding in a synchronous machine. At no-load, the
voltages imposed to the stator winding will set up a magnetic field
in the motor, which crosses the air gap and rotates with a speed
given by the frequency of the imposed voltages, called synchronous
frequency, fs. Hence, the synchronous speed ns:
(3.1)
As the shafts get loaded, the rotor speed will decrease, and
there will be induced currents in the rotor winding since they are
rotating relatively to the synchronous rotating magnetic field from
the stator windings. One defines the slip, s, as the relative lag
of motor speed to the synchronous speed ns:
(3.2)
Hence the slip varies from 0 (no load) to 1 (block rotor). The
slip at rated load is normally below 0.05 (5%) for most motor
design, and even lower (2-3%) for large motors.
60/ 2
ss
fn
p
=
s
s
n ns
n
=
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 39
3.5.1 Asynchronous (Induction Motors) The asynchronous or
induction motor is the workhouse of the industry. Its rugged and
simple design ensures in most cases a long lifetime with a minimum
of breakdown and maintenance. The asynchronous motor is used in any
applications, either as a constant speed motor directly connected
to the network, or as a variable speed motor fed from a static
frequency converter.
The induction motor is characterized by simplicity, reliability,
and low cost, combined with reasonable overload capacity, minimal
service requirements, and good efficiency.
An induction motor utilizes alternating current supplied to the
stator directly. The rotor receives power by induction effects. The
stator windings of an induction motor are similar to those of the
synchronous machine. The rotor may be one of two types. In the
wound rotor motor, windings similar to those of the stator are
employed with terminals connected to insulated slip rings mounted
on the shaft. The rotor terminals are made available through carbon
brushes bearing on the slip rings. The second type is called the
squirrel-cage rotor, where the windings are simply conducting bars
embedded in the rotor and short-circuited at each end by conducting
end rings.
Figure 3-8: Asynchronous (Induction) motor construction (Wildi,
2006)
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 40
3.5.2 Synchronous Motors
Synchronous electric motors are AC motors that operate at fixed
frequency of the system. These motors require direct current (DC)
for excitation and have a low starting torque, and therefore
synchronous motor suitable for use beginning with low load, such as
air compressors, frequency changes and the generator motor.
Synchronous motor is able to correct the power factor of the system
and usually used in energy power systems that use a lot of
electricity.
The synchronous machine is normally not used as a motor in ship
applications, with exception of large propulsion drives, typically
> 5 MW directly connected to propeller shaft, or > 8-10 MW
with a gear connection. In power range smaller than this, the
asynchronous motor is normally cost-competitive. The design of a
synchronous motor is similar to that of a synchronous generator. It
is normally not used without a frequency converter supply for
variable speed control in ship applications.
Synchronous motors are like induction motors in that they both
have stator windings that produce a rotating magnetic field. Unlike
an induction motor, the synchronous motor is excited by an external
DC source and, therefore, requires slip rings and brushes to
provide current to the rotor. In the synchronous motor, the rotor
locks into step with the rotating magnetic field and rotates at
synchronous speed. If the synchronous motor is loaded to the point
where the rotor is pulled out of step with the rotating magnetic
field, no torque is developed, and the motor will stop. A
synchronous motor is not a self-starting motor because torque is
only developed when running at synchronous speed; therefore, the
motor needs some type of device to bring the rotor to synchronous
speed.
A synchronous motor may be started by a DC motor on a common
shaft. When the motor is brought to synchronous speed, AC current
is applied to the stator windings. The DC motor now acts as a DC
generator and supplies DC field excitation to the rotor of the
synchronous motor. The load may now be placed on the synchronous
motor. Synchronous motors are more often started by means of a
squirrel-cage winding embedded in the face of the rotor poles. The
motor is then started as an induction motor and brought to ~95% of
synchronous speed, at which time direct current is applied, and the
motor begins to pull into synchronism. The torque required to pull
the motor into synchronism is called the pull-in torque.
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 41
Figure 3-9: Synchronous motor construction (Wildi, 2006)
Synchronous motor has four main parts, rotor, stator, dc
excited, and stator frame. Large machines include additional parts
for cooling the machine, supporting the rotor, lubricating and
cooling the bearings, and various protection and measurement
devices.
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 42
3.6 Power Flow and Power Efficiency
Figure 3-10: Power flow in a simplified electric power system
(Adnanes, 2003)
The prime movers e.g. diesel generators or gas turbines supply a
power to the electric generator shaft. The electric motor, which
could be the propulsion motor, is loaded by a power from its
connected load. The power flow in diesel-electric propulsion is
shown in Figure 3-10. The power lost in the components between the
shaft of the diesel engine and the shaft of the electric motor is
mechanical and electrical losses which gives heat and temperature
increase in equipment and ambient and the typical values of
electrical efficiencies in DEP system according to Table 3-1.
(3.3)
out outElectrical
in out losses
P PP P P
= =+
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 43
Table 3-1: Typical values of electrical efficiencies in DEP
system (Adnanes, 2003)
Typical values of electrical efficiencies Generator 0.95 0.97
Switchboard 0.999 Transformer 0.99 0.995 Frequency Converter 0.98
0.99 Electric Motor 0.95 0.97 Diesel engine shaft to electric
propulsion motor shaft 0.88 0.92
3.7 Ship Fuel Consumption
Fuel economy is important, not only because of the direct
operational cost consequences for a diesel plant operator, but also
in view of the ultimate scarcity of fossil fuel and the direct link
with the emission of pollutants.
The measurement for fuel economy is specific fuel consumption,
SFC. The specific fuel consumption is by defining the fuel
consumption of the engine related to brake power.
f
B
msfc
P=
i
(3.4)
The specific fuel consumption will have a value of sfc 220
160g/kWh. By multiplying the specific fuel consumption with the
power, the fuel consumption of the ship per unit time can be
obtained:
f Bm sfc P= i
(3.5) The fuel consumption per mile covered can be found by
dividing the fuel consumption per hour by the speed:
f
s
mfcmv
=
i
(3.6)
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 44
3.8 Range and Endurance
When given the amount of fuel F onboard and the fuel consumption
per mile, fcm as a function of ship speed the following can be
determined:
Range: How far can the ship get as a function of speed?
Endurance: How long can the ship sail as a function of speed?
If the amount of fuel available on board is F then the range is
the inverse of fuel consumption per mile:
FR fcm= (3.7)
Figure 3-11: Range of a typical frigate of 3300 tonne
displacement with mechanically driven CODOG installations
(Stapersma & Woud, 2002)
Figure 3-11 shows a typical curve of the range of the example
ship as a function of speed. Range is the inverse of fuel
consumption per mile, so if there is an optimum for fuel
consumption, there is an optimum range as well.
-
Modelling and Simulation of Marine Power and Propulsion
Systems
Melvin Loh (113807) Page 45
Endurance is important in case a ship has to stay present in a
certain area. It is linked to range as follows:
s
REv
= (3.8)
Figure 3-12: Endurance of the example ship (Stapersma &
Woud, 2002)
Figure 3-12 gives the endurance of the example ship for which
the previous figure gave the range. There is a step when changing
from main to cruise engines. A marked difference with the range is
that endurance always increases when ship speed decreases. In fact
the maximum occurs exactly at zero ship speed.