Embed Size (px)
Citation preview

PLATAFORMA INTEGRADA PARA ENSINO DE CONTROLE E AUTOMACAO
Maria Auxiliadora Muanis Persechini∗, Luiz T. S. Mendes∗
∗Departamento de Engenharia EletronicaUniversidade Federal de Minas Gerais
Emails: [email protected], [email protected]
Abstract— This work reports the process of integrating the laboratory facilities used for the teaching ofcontrol and automation, by means of a PIMS (Plant Information Management System). We first review thetypical architectures of control and automation systems from its classical, hierarchical structure standpoint, aswell as the relevance of data historians in industry. Three different pilot plants, composed by sensors, actuators,programmable logic controllers and supervisory systems, were selected to be integrated through the PIMS; then,based on the specific features of those pilot plants, we obtained the functional requirements for integrating themwith the historian. A discussion on the didactic potential of the integrated platform closes the work.
Keywords— Control and automation teaching; Systems Integration; Data Historians.
Resumo— Nesse trabalho descreve-se o processo de integracao dos laboratorios de ensino de controle e automa-cao atraves do uso de um PIMS (Plant Information Management System). Inicialmente sao revistas as diferentesarquiteturas de sistemas para controle e automacao, organizadas de acordo com a piramide de automacao, e a re-levancia do emprego de historiadores de dados. Tres diferentes plantas-piloto, compostas por sensores, atuadores,Controladores Logicos Programaveis e sistemas de supervisao, foram entao selecionadas para integracao atravesdo PIMS. A partir das caracterısticas das plantas-piloto, foram definidos os requisitos do processo de integracaocom o historiador. Finalmente, apresenta-se uma analise do potencial didatico da plataforma integrada.
Palavras-chave— Ensino de Controle e Automacao; Integracao de sistemas; Historiadores de dados.
1 Introducao
A aquisicao de competencias por meio de expe-rimentos laboratoriais e uma parte importantedo ensino de engenharia (Feisel and Rosa, 2005),(Pereira et al., 2012), (Wollenberg and Mohan,2010). Neste contexto, a realizacao de experi-mentos que utilizam plantas-pilotos e de modu-los didaticos que reproduzem o ambiente indus-trial e amplamente utilizada no ensino de tecni-cas de controle e automacao de processos, comopode ser visto em varios trabalhos na literatura(p. ex. Achy et al., 2012; Silva and Erick A. Ri-beiro, 2012; Nogueira et al., 2012; Bejan et al.,2009; Moor et al., 2005; Lee and Jung, 2008).
Vallim at all (Vallim et al., 2006) afirmam queos engenheiros de controle e automacao sao aque-les com conhecimento pratico e teorico para lidarcom diferentes sistemas tais como os mecanicos,quımicos, de telecomunicacoes, eletricos, biologi-cos e economicos. Alem destes, pode-se incluirsistemas computacionais, de transporte, medicose fisiologicos, so para citar alguns outros. De umponto de vista mais amplo, um atributo essencialdestes engenheiros e a capacidade de integrar taissistemas de modo que eles possam ser executadosde uma maneira contınua, com uma mınima inter-vencao humana.
De uma forma geral, laboratorios para ensinode controle e automacao empregam uma grandevariedade e quantidade de recursos, como, porexemplo, computadores e seus aplicativos de soft-ware, controladores logicos programaveis, diferen-tes redes de comunicacao de dados, modulos di-
daticos, plantas-pilotos e uma diversidade de sen-sores e atuadores, com a finalidade de permitir odesenvolvimento de atividades praticas que resul-tem no projeto, na implementacao e em testes dediferentes tecnicas de controle e de automacao. Noentanto, muitas destas atividades abordam aspec-tos isolados, dificultando a integracao e a consoli-dacao dos conhecimentos necessarios para exerceras competencias e habilidades necessarias ao en-genheiro de controle e automacao.
O grande desenvolvimento dos sistemas de in-formacao, com seus computadores e redes de co-municacao, e um grande facilitador para a inte-gracao dos diferentes sistemas. No entanto, ate oinıcio dos anos 1990 os sistemas de controle deprocessos eram isolados dos sistemas de gestaocorporativas. Essa filosofia mudou drasticamentenas ultimas decadas, tornando-se imprescindıvela troca de informacao entre as redes de controlee automacao de processos e as redes corporativas(Sopko and Winegardner, 2007). Dessa forma, in-tegrar os sistemas de controle e automacao aossistemas de gestao de informacoes cria um canalde comunicacao bilateral que permite a disponibi-lizacao de dados de chao de fabrica (por exemplo,consumo de energia, fluxo de materia prima, dis-ponibilidade de equipamentos) altamente precisose atualizados que poderao ser utilizados para umagestao da manufatura de forma mais efetiva.
Tendo em mente os objetivos fundamentais deum laboratorio para ensino de engenharia listadosem (Feisel and Rosa, 2005), o principal objetivodeste artigo e descrever uma plataforma integrada,composta de algumas plantas-piloto e um sistema
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1411
de gestao de informacoes, para a realizacao de ex-perimentos que permitam o desenvolvimento dasseguintes habilidades:
• Selecionar, operar e modificar equipamentose ferramentas de software adequadas para osnıveis de controle e automacao de processos;
• Reunir informacoes para fazer julgamentos deengenharia e apresentar solucoes para proble-mas reais de integracao de sistemas de con-trole, automacao e gestao de processos;
• Exercer a criatividade para resolver proble-mas do mundo real.
Para detalhar o processo de integracao, esteartigo esta estruturado da seguinte forma: a se-cao 2 apresenta as caracterısticas de diferentesarquiteturas para sistemas de controle e automa-cao, organizadas de acordo com a estrutura hierar-quica apresentada na norma ISA-95 (( ANSI/ISA-95.00.03, 2005)Enterprise-Control System Integra-tion). A secao 3 apresenta as caracterısticas rele-vantes dos sistemas referidos como PIMS (PlantInformation Management System). A secao 4 des-creve as plantas-piloto que foram integradas entresi, ao passo que o processo de integracao em si edescrito na secao 5. A secao 6 discute o potencialdidatico da plataforma integrada e, finalmente, nasecao 7 sao apresentadas as conclusoes.
2 Arquiteturas para controle eautomacao de processos
Os sistemas modernos de automacao e controle emprocessos industriais, alem das funcoes obvias deoperacao, supervisao e controle das plantas em si,sao responsaveis tambem por diversas outras entreas quais podem-se citar as tarefas de otimizacao,escalonamento e planejamento. Estes sistemas ga-rantem, entre outros propositos, que parametrosadequados sejam medidos, que situacoes operaci-onais sejam analisadas, que oportunidades maislucrativas sejam exploradas, que acoes de controlesejam calculadas e implementadas, que os opera-dores estejam informados e seus conhecimentos ecapacidades tecnicas sejam aproveitados, que si-tuacoes anormais sejam identificadas e sanadas,e que, finalmente, todo o negocio relacionado aoprocesso seja integrado.
Os componentes e dispositivos de um sistemade automacao executam as funcoes que sao essen-ciais para a operacao segura e eficiente do pro-cesso. Mas e a arquitetura do sistema de automa-cao (ou seja, a organizacao logica dos componen-tes associados a infra-estrutura) que, muitas ve-zes, define as escolhas destes componentes e influ-encia ındices de desempenho como, por exemplo,fiabilidade, qualidade dos produtos, eficiencia, es-calabilidade e custo. A arquitetura do sistema deautomacao tambem define com as aplicacoes serao
integradas, desenvolvidas e mantidas durante seuciclo de vida (Samad et al., 2007).
A escolha de uma arquitetura tem impacto di-reto de como um processo industrial sera contro-lado. Alem disso, a escala e a complexidade dosprocessos industriais aumenta a importancia daarquitetura adotada. Independentemente da ar-quitetura utilizada, espera-se que um sistema deautomacao e controle, de forma ampla, seja capazde controlar, operar, monitorar, supervisionar egerenciar um determinado processo para atingirobjetivos especıficos de qualidade, conformidadee custo. Sendo assim, a selecao de uma determi-nada arquitetura, em detrimento de outras, nao etrivial e depende, entre outros fatores, do processoa ser controlado, da instrumentacao utilizada, dainteroperabilidade dos componentes e da flexibi-lidade do sistema. Portanto, as solucoes irao de-pender das limitacoes de cada projeto em particu-lar levando-se em consideracao aspectos tecnicos,ambientais e financeiros
Arquiteturas para automacao de processossao normalmente estruturas hierarquizadas e com-plexas, que tem como principais objetivos (Samadet al., 2007) (1) conceber infra-estrutura, servi-cos, componentes e seus esquemas organizacionaispara melhor exercer as funcoes de automacao; e(2) integrar, de forma coesa, elementos aparente-mente dıspares em uma eficaz e coerente estru-tura.
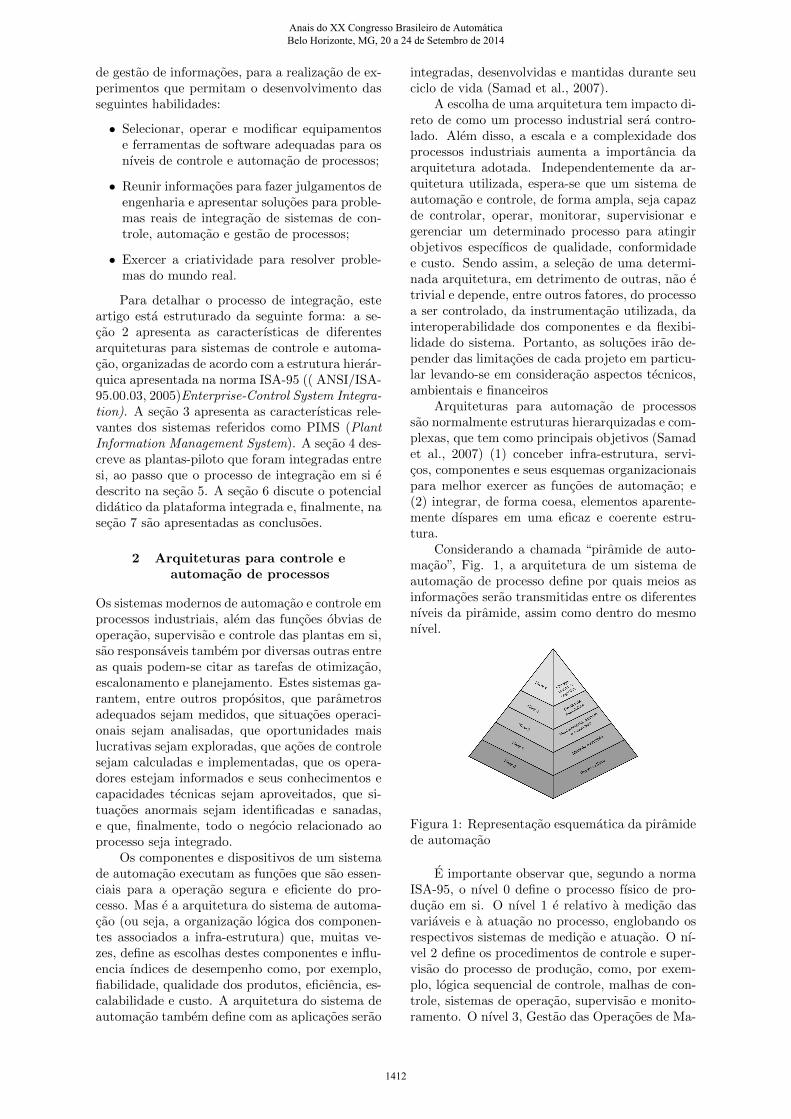
Considerando a chamada “piramide de auto-macao”, Fig. 1, a arquitetura de um sistema deautomacao de processo define por quais meios asinformacoes serao transmitidas entre os diferentesnıveis da piramide, assim como dentro do mesmonıvel.
Figura 1: Representacao esquematica da piramidede automacao
E importante observar que, segundo a normaISA-95, o nıvel 0 define o processo fısico de pro-ducao em si. O nıvel 1 e relativo a medicao dasvariaveis e a atuacao no processo, englobando osrespectivos sistemas de medicao e atuacao. O nı-vel 2 define os procedimentos de controle e super-visao do processo de producao, como, por exem-plo, logica sequencial de controle, malhas de con-trole, sistemas de operacao, supervisao e monito-ramento. O nıvel 3, Gestao das Operacoes de Ma-
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1412

nufatura (MOM Manufacturing Operations Ma-nagement), define as atividades de coleta e arma-zenamento de informacoes relevantes do processo edo gerenciamento das operacoes do processo. Fi-nalmente, o nıvel 4, Planejamento do negocio eLogıstica (Business planning & Logistics) prove asatividades de gerenciamento do empreendimento,correspondente ao nıvel denominado ERP (Enter-prise Resource Planning).
No nıvel 1 os instrumentos (sensores e atua-dores), responsaveis tanto pela medicao de varia-veis quanto pela atuacao nos dispositivos fısicos,sao dotados de alguma forma de transmissao dedados, o que possibilita a troca de informacoesentre o nıvel de instrumentacao e o nıvel de con-trole. Basicamente, essa transmissao pode ser im-plementada de duas formas distintas: analogicaou digital. Normalmente a transmissao analogicae orientada a conexoes ponto-a-ponto com o nı-vel de controle. A transmissao na forma digital eorientada a conexoes via rede com o nıvel de con-trole, permitindo, em alguns casos, a comunica-cao entre os instrumentos da mesma rede. Existeuma grande variedade de redes de instrumentos,como por exemplo Foundation Fieldbus H1, Profi-bus PA, Hart, so para citar algumas padronizadaspela norma IEC 61784 (Industrial communicationnetworks Profiles). Alem disso, redes de instru-mentos sem fio tem se tornado cada vez mais umarealidade no ambiente industrial (Costa and Ama-ral, 2012), (Gungor and Hancke, 2009).
O nıvel 2, sob o ponto de vista da arquitetura,pode ser subdividido em nıvel de controle e nıvelde supervisao. O nıvel de controle e onde residea “inteligencia” para automacao do processo, ouseja, e onde sao executadas as logicas de controlesequencial e os algoritmos de controle. Os disposi-tivos de controle capturam dados de processo dossensores, executam alguma logica e, em funcao damesma, enviam sinais aos atuadores.
Para sistemas de automacao, a arquitetura decontrole do processo pode ser centralizada ou dis-tribuıda. Em uma arquitetura centralizada, asfuncionalidades e os algoritmos de controle es-tao contidos em um unico equipamento, como,por exemplo, um Controlador Logico Programavel(CLP) ou equipamentos como single-loops e multi-loops. Em uma arquitetura distribuıda, como oproprio nome indica, as funcionalidades e os algo-ritmos de controle estao fisicamente distribuıdosentre os diferentes dispositivos e equipamentos quecompoem o sistema, como, por exemplo, em umSistema Digital de Controle Distribuıdo (SDCDou DCS - para Distributed Control System) ouum Sistema de Controle via Rede (ou NCS, paraNetworked Control Systems). Neste ultimo caso,a logica de controle pode ser executada no proprioinstrumento.
O nıvel de supervisao e responsavel pela inter-face homem-maquina (IHM ou HMI - Human Ma-
chine Interface), onde as principais funcoes execu-tadas sao a operacao, a supervisao e o monitora-mento do processo. Essas interfaces variam desdesimples displays de texto, paineis graficos e touchs-creens ate sistemas do tipo SCADA (SupervisoryControl and Data Acquisition) e solucoes de IHMvia web servers.
As redes de comunicacao utilizadas paratransmitir comandos e dados entre os nıveis decontrole e supervisao sao responsaveis, por exem-plo, pela integracao entre os CLPs e os sistemas dotipo SCADA, podendo incluir outros dispositivoscomo, por exemplo, remotas de aquisicao de da-dos, balancas totalizadoras, medidores de energia,conversores de frequencia, etc. Exemplos tıpicossao as redes DeviceNet e Profibus-DP ou redesbaseadas no padrao Ethernet como, por exemplo,HSE, Modbus/TCP, Ethernet PowerLink e Profi-net, entre outras. Independentemente da rede uti-lizada, a comunicacao entre os dispositivos paracontrole e para supervisao utiliza normalmenteuma arquitetura cliente-servidor com padrao decomunicacao OPC (OLE for Process Control).
No Nıvel 3, os sistemas de Gestao das Ope-racoes de Manufatura sao uma colecao de ferra-mentas de software dedicadas a gestao da criacao,do desenvolvimento, da producao e da distribui-cao de produtos e servicos. Sob o ponto de vistada piramide de automacao, estes sistemas sao res-ponsaveis pela integracao entre os nıveis de su-pervisao e controle e o topo da piramide, onde saoexecutadas as aplicacoes corporativas (ERP). Anorma ISA-95 estabelece apenas a linguagem co-mum e modelos para estes sistemas; cabe aos ven-dedores e integradores desenvolverem e implanta-rem suas solucoes baseadas nestes modelos. Porexemplo, MES (Manufacturing Execution System)e PIMS (Process Information Management Sys-tem) sao sistemas de informacao que cobrem di-ferentes funcionalidades para a gestao das opera-coes da manufatura. Estao ainda incluıdos nestenıvel sistemas de manutencao, sistemas de geren-ciamento de ativos, sistemas de gerenciamento eanalise de laboratorios (LIMS, para Laboratory In-formation Management System) e sistemas de ge-renciamento de qualidade, entre outros.
3 Historiadores de Dados e PIMS
Historiadores de dados (data historians) sao umaclasse de aplicacoes proprietarias de software bas-tante tradicional na industria de processos, cu-jos propositos sao (1) coletar, em tempo real,os dados de processos industriais disponıveis nasvarias “ilhas de automacao” presentes em umaplanta industrial, tais como, mas nao se restrin-gindo a, CLPs, sistemas de operacao e supervisao(SCADA), instrumentos inteligentes, remotas deaquisicao de dados e etc.; (2) arquivar estes da-dos numa base de dados temporal; e (3) propiciar
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1413
recursos de extracao, analise, correlacao e visua-lizacao destes dados. O historiador de dados age,assim, nao so como um repositorio centralizadode dados historicos do processo industrial, mastambem como uma importante ferramenta paraanalise das condicoes operacionais da planta, de-terminacao de causas-raızes de problemas ligadosa manufatura, computo de indicadores-chaves dedesempenho (os chamados KPIs, de Key Perfor-mance Indicator) e etc.
Para lidar com o grande volume de dadosdo processo industrial, gerado rotineiramente comperiodicidade da ordem de segundos, os histori-adores de dados empregam tecnicas sofisticadasde compressao de dados baseadas em algoritmospublicos ou proprietarios, permitindo o arquiva-mento dos dados de processo por longos perıo-dos de tempo (da ordem de uma decada) semperda significativa de precisao. De fato, esta ca-racterıstica de compressao de dados, aliada ao usode uma base de dados temporal (e portanto nao-relacional), e um dos principais fatores que dis-tinguem os historiadores de dados dos sistemastradicionais de informacoes industriais.
Por outro lado, a crescente demanda de inte-gracao vertical entre o chao-de-fabrica ( nıveis 1e 2 da piramide) e o setor corporativo (nıvel 4 dapiramide) das organizacoes industriais, conjugadacom a percepcao de que os dados presentes noshistoriadores de dados possuem um enorme po-tencial para alavancar a inteligencia de negociosdas empresas, deu origem ao conceito de PIMSem meados da decada de 1990. Este e uma ferra-menta para gestao de informacoes de processos in-dustriais no seu mais completo sentido, compostade um historiador de dados em seu nucleo, mascujo proposito transcende e amplia as funciona-lidades tradicionais deste ultimo: o PIMS visa aconversao de dados brutos em informacao e, su-cessivamente, desta em conhecimento util (kno-wledge) sobre o processo industrial, propiciandoo aperfeicoamento dos processos industriais e me-lhores decisoes operacionais, de projeto e de ma-nutencao da planta industrial.
A utilizacao de PIMS nas plantas industri-ais, em especial em industrias de medio a grandeporte, tem se tornado crescente no decorrer dasultimas duas decadas, com resultados satisfato-rios em variados aspectos como, para citar ape-nas alguns exemplos, o suporte a melhores deci-soes de negocio (Becerra and Palacios, 2003; Huffand Mynster, 2004), o emprego de dados historicospara validar as condicoes atuais de funcionamentode sensores (Eren, 2012), a obtencao de conheci-mento sobre o processo (Bassett, 2012), a otimi-zacao de malhas de controle (Oliveira et al., 2013)e o suporte a manutencao (Souza et al., 2009).
4 Descricao das plantas-piloto
Os Laboratorios do Departamento de EngenhariaEletronica da UFMG contam com diversos recur-sos como plantas-piloto e modulos didaticos paraensino de tecnicas de controle e automacao. Es-tes recursos visam reproduzir caracterısticas reaisde processos industriais e sao utilizados em diver-sas atividades didaticas e de pesquisa. Entre asplantas-piloto existentes, tres foram selecionadaspara serem integradas entre si por meio de umPIMS; tais plantas, que abrangem os nıveis 0, 1 e2 da piramide de automacao apresentada na Fig.1, sao descritas a seguir.
4.1 Estufa
O objetivo dessa planta-piloto e reproduzir um sis-tema termico e permitir o projeto e a implemen-tacao de controladores que possam ser executadosem um CLP, alem de poder ser utilizada para es-tudos relacionados a comunicacao e integracao dedados, assim como a configuracao de sistemas desupervisao.
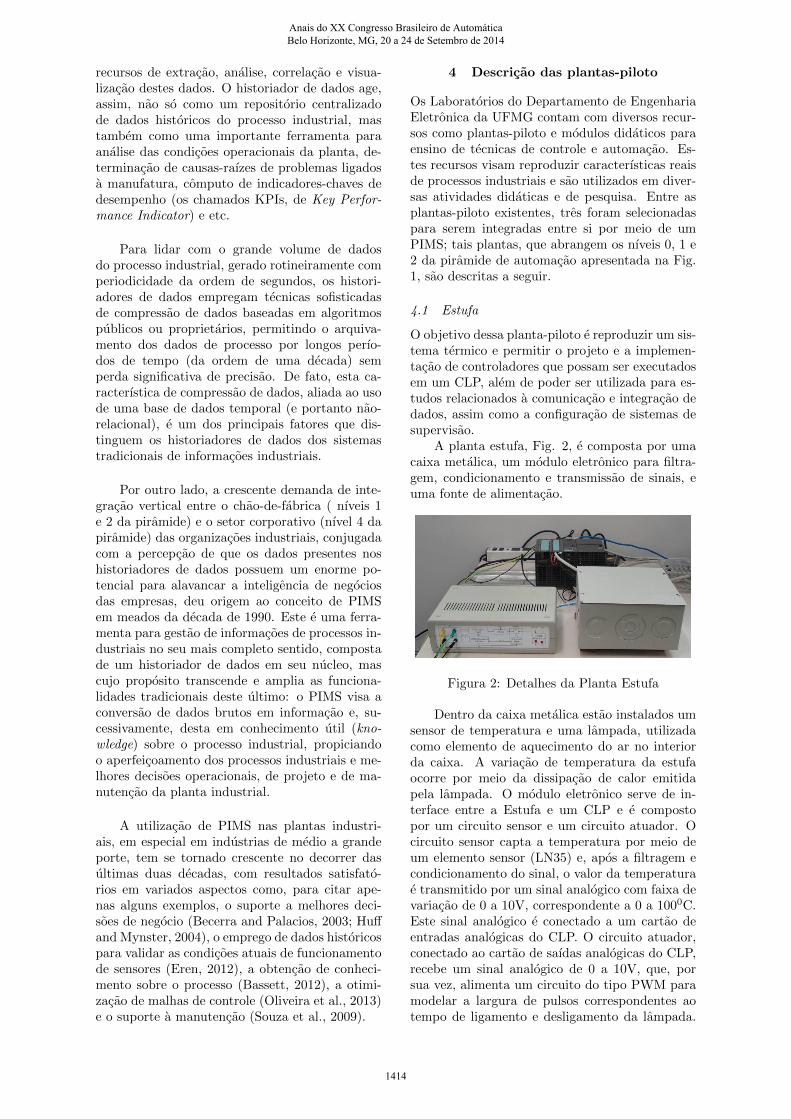
A planta estufa, Fig. 2, e composta por umacaixa metalica, um modulo eletronico para filtra-gem, condicionamento e transmissao de sinais, euma fonte de alimentacao.
Figura 2: Detalhes da Planta Estufa
Dentro da caixa metalica estao instalados umsensor de temperatura e uma lampada, utilizadacomo elemento de aquecimento do ar no interiorda caixa. A variacao de temperatura da estufaocorre por meio da dissipacao de calor emitidapela lampada. O modulo eletronico serve de in-terface entre a Estufa e um CLP e e compostopor um circuito sensor e um circuito atuador. Ocircuito sensor capta a temperatura por meio deum elemento sensor (LN35) e, apos a filtragem econdicionamento do sinal, o valor da temperaturae transmitido por um sinal analogico com faixa devariacao de 0 a 10V, correspondente a 0 a 1000C.Este sinal analogico e conectado a um cartao deentradas analogicas do CLP. O circuito atuador,conectado ao cartao de saıdas analogicas do CLP,recebe um sinal analogico de 0 a 10V, que, porsua vez, alimenta um circuito do tipo PWM paramodelar a largura de pulsos correspondentes aotempo de ligamento e desligamento da lampada.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1414
Dessa forma, a potencia media entregue a lam-pada varia de acordo com o sinal enviado peloCLP.
O CLP utilizado nessa planta e composto poruma CPU 315F-2PN/DP, fonte, um cartao mistode entradas e saıdas analogicas e um cartao mistode entradas e saıdas discretas fabricado pela Si-emens AG. O CLP e conectado a um computa-dor via porta Ethernet. Neste computador saoexecutados os aplicativos de configuracao e pro-gramacao do CLP e um sistema de supervisao dotipo SCADA, Genesis32, fabricado pela Iconics.A comunicacao entre o CLP e o sistema de su-pervisao e baseada no padrao de comunicacao cli-ente/servidor OPC.
4.2 Sistema de tanques - STEC-NVT
O STEC-NVT, ou sistema de tanques para estudode controle de nıvel, vazao e temperatura, visa areproducao de situacoes reais de um processo in-dustrial contınuo, instrumentado com equipamen-tos comerciais e aplicacoes de software que saocomumente usadas nas industrias. Esta planta-piloto permite, entre outros, estudos de tecnicasavancadas de controle; de redes de instrumentosde campo; de sistemas de controle distribuıdos earquiteturas complexas de controle e automacao.
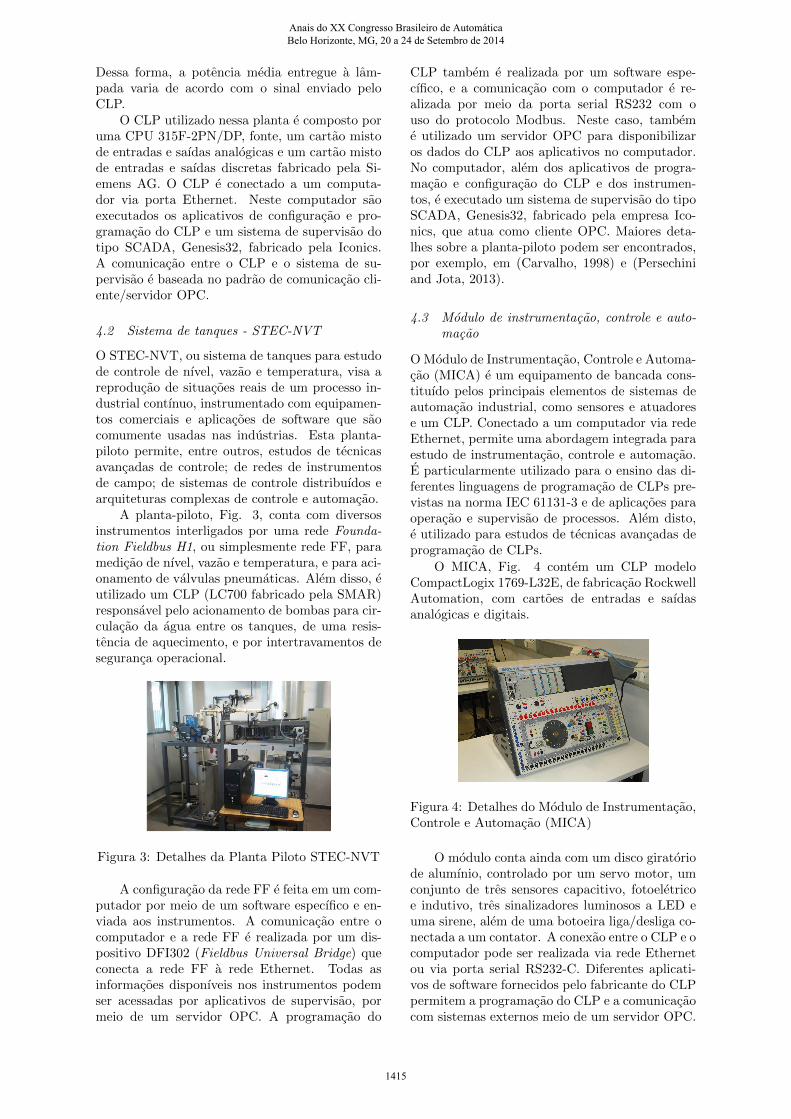
A planta-piloto, Fig. 3, conta com diversosinstrumentos interligados por uma rede Founda-tion Fieldbus H1, ou simplesmente rede FF, paramedicao de nıvel, vazao e temperatura, e para aci-onamento de valvulas pneumaticas. Alem disso, eutilizado um CLP (LC700 fabricado pela SMAR)responsavel pelo acionamento de bombas para cir-culacao da agua entre os tanques, de uma resis-tencia de aquecimento, e por intertravamentos deseguranca operacional.
Figura 3: Detalhes da Planta Piloto STEC-NVT
A configuracao da rede FF e feita em um com-putador por meio de um software especıfico e en-viada aos instrumentos. A comunicacao entre ocomputador e a rede FF e realizada por um dis-positivo DFI302 (Fieldbus Universal Bridge) queconecta a rede FF a rede Ethernet. Todas asinformacoes disponıveis nos instrumentos podemser acessadas por aplicativos de supervisao, pormeio de um servidor OPC. A programacao do
CLP tambem e realizada por um software espe-cıfico, e a comunicacao com o computador e re-alizada por meio da porta serial RS232 com ouso do protocolo Modbus. Neste caso, tambeme utilizado um servidor OPC para disponibilizaros dados do CLP aos aplicativos no computador.No computador, alem dos aplicativos de progra-macao e configuracao do CLP e dos instrumen-tos, e executado um sistema de supervisao do tipoSCADA, Genesis32, fabricado pela empresa Ico-nics, que atua como cliente OPC. Maiores deta-lhes sobre a planta-piloto podem ser encontrados,por exemplo, em (Carvalho, 1998) e (Persechiniand Jota, 2013).
4.3 Modulo de instrumentacao, controle e auto-macao
O Modulo de Instrumentacao, Controle e Automa-cao (MICA) e um equipamento de bancada cons-tituıdo pelos principais elementos de sistemas deautomacao industrial, como sensores e atuadorese um CLP. Conectado a um computador via redeEthernet, permite uma abordagem integrada paraestudo de instrumentacao, controle e automacao.E particularmente utilizado para o ensino das di-ferentes linguagens de programacao de CLPs pre-vistas na norma IEC 61131-3 e de aplicacoes paraoperacao e supervisao de processos. Alem disto,e utilizado para estudos de tecnicas avancadas deprogramacao de CLPs.
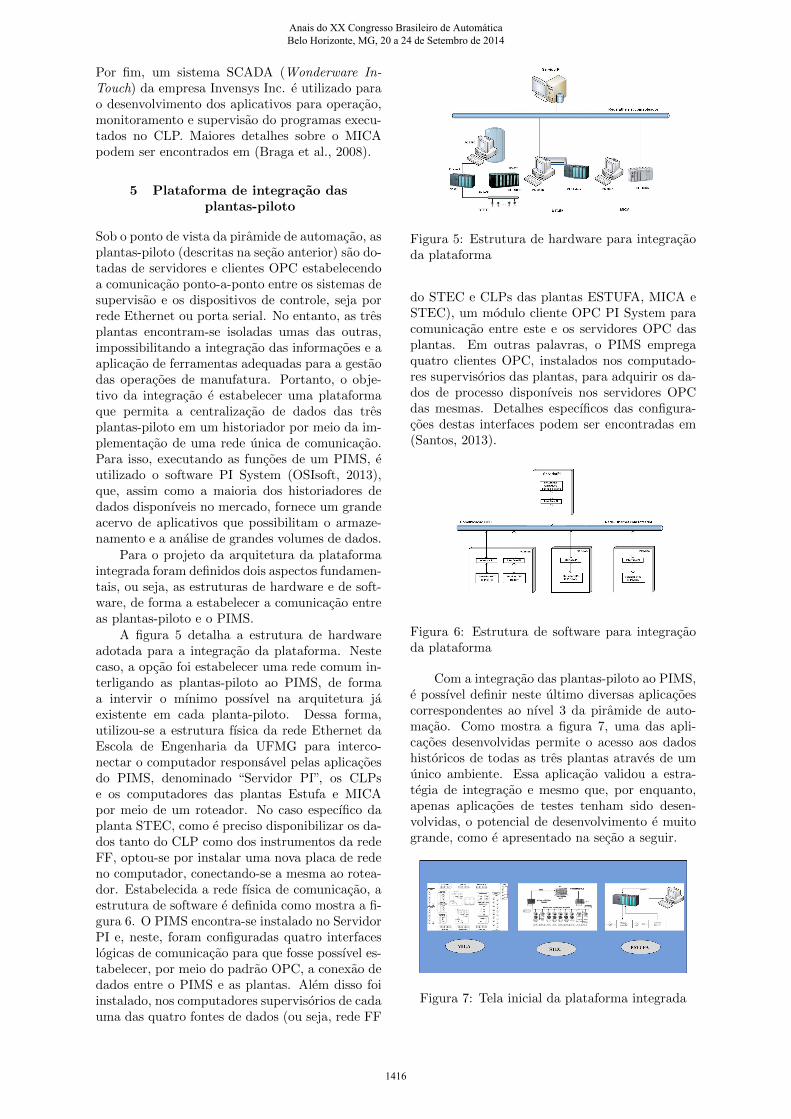
O MICA, Fig. 4 contem um CLP modeloCompactLogix 1769-L32E, de fabricacao RockwellAutomation, com cartoes de entradas e saıdasanalogicas e digitais.
Figura 4: Detalhes do Modulo de Instrumentacao,Controle e Automacao (MICA)
O modulo conta ainda com um disco giratoriode alumınio, controlado por um servo motor, umconjunto de tres sensores capacitivo, fotoeletricoe indutivo, tres sinalizadores luminosos a LED euma sirene, alem de uma botoeira liga/desliga co-nectada a um contator. A conexao entre o CLP e ocomputador pode ser realizada via rede Ethernetou via porta serial RS232-C. Diferentes aplicati-vos de software fornecidos pelo fabricante do CLPpermitem a programacao do CLP e a comunicacaocom sistemas externos meio de um servidor OPC.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1415
Por fim, um sistema SCADA (Wonderware In-Touch) da empresa Invensys Inc. e utilizado parao desenvolvimento dos aplicativos para operacao,monitoramento e supervisao do programas execu-tados no CLP. Maiores detalhes sobre o MICApodem ser encontrados em (Braga et al., 2008).
5 Plataforma de integracao dasplantas-piloto
Sob o ponto de vista da piramide de automacao, asplantas-piloto (descritas na secao anterior) sao do-tadas de servidores e clientes OPC estabelecendoa comunicacao ponto-a-ponto entre os sistemas desupervisao e os dispositivos de controle, seja porrede Ethernet ou porta serial. No entanto, as tresplantas encontram-se isoladas umas das outras,impossibilitando a integracao das informacoes e aaplicacao de ferramentas adequadas para a gestaodas operacoes de manufatura. Portanto, o obje-tivo da integracao e estabelecer uma plataformaque permita a centralizacao de dados das tresplantas-piloto em um historiador por meio da im-plementacao de uma rede unica de comunicacao.Para isso, executando as funcoes de um PIMS, eutilizado o software PI System (OSIsoft, 2013),que, assim como a maioria dos historiadores dedados disponıveis no mercado, fornece um grandeacervo de aplicativos que possibilitam o armaze-namento e a analise de grandes volumes de dados.
Para o projeto da arquitetura da plataformaintegrada foram definidos dois aspectos fundamen-tais, ou seja, as estruturas de hardware e de soft-ware, de forma a estabelecer a comunicacao entreas plantas-piloto e o PIMS.
A figura 5 detalha a estrutura de hardwareadotada para a integracao da plataforma. Nestecaso, a opcao foi estabelecer uma rede comum in-terligando as plantas-piloto ao PIMS, de formaa intervir o mınimo possıvel na arquitetura jaexistente em cada planta-piloto. Dessa forma,utilizou-se a estrutura fısica da rede Ethernet daEscola de Engenharia da UFMG para interco-nectar o computador responsavel pelas aplicacoesdo PIMS, denominado “Servidor PI”, os CLPse os computadores das plantas Estufa e MICApor meio de um roteador. No caso especıfico daplanta STEC, como e preciso disponibilizar os da-dos tanto do CLP como dos instrumentos da redeFF, optou-se por instalar uma nova placa de redeno computador, conectando-se a mesma ao rotea-dor. Estabelecida a rede fısica de comunicacao, aestrutura de software e definida como mostra a fi-gura 6. O PIMS encontra-se instalado no ServidorPI e, neste, foram configuradas quatro interfaceslogicas de comunicacao para que fosse possıvel es-tabelecer, por meio do padrao OPC, a conexao dedados entre o PIMS e as plantas. Alem disso foiinstalado, nos computadores supervisorios de cadauma das quatro fontes de dados (ou seja, rede FF
Figura 5: Estrutura de hardware para integracaoda plataforma
do STEC e CLPs das plantas ESTUFA, MICA eSTEC), um modulo cliente OPC PI System paracomunicacao entre este e os servidores OPC dasplantas. Em outras palavras, o PIMS empregaquatro clientes OPC, instalados nos computado-res supervisorios das plantas, para adquirir os da-dos de processo disponıveis nos servidores OPCdas mesmas. Detalhes especıficos das configura-coes destas interfaces podem ser encontradas em(Santos, 2013).
Figura 6: Estrutura de software para integracaoda plataforma
Com a integracao das plantas-piloto ao PIMS,e possıvel definir neste ultimo diversas aplicacoescorrespondentes ao nıvel 3 da piramide de auto-macao. Como mostra a figura 7, uma das apli-cacoes desenvolvidas permite o acesso aos dadoshistoricos de todas as tres plantas atraves de umunico ambiente. Essa aplicacao validou a estra-tegia de integracao e mesmo que, por enquanto,apenas aplicacoes de testes tenham sido desen-volvidas, o potencial de desenvolvimento e muitogrande, como e apresentado na secao a seguir.
Figura 7: Tela inicial da plataforma integrada
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1416

6 Potencial Didatico da PlataformaIntegrada
A integracao de diferentes plantas-piloto com umPIMS estabelece as bases para o desenvolvimentode diversas atividades praticas que permitem oaprimoramento das competencias e habilidadesnecessarias a um engenheiro de controle e auto-macao.
Por meio do estudo dos elementos da plata-forma e possıvel identificar as funcionalidades dosdiferentes nıveis da piramide de automacao, anali-sar e comparar as ferramentas de software, os equi-pamentos e os instrumentos utilizados em cada nı-vel. Para isso contribui o fato da utilizacao de dife-rentes ferramentas para realizar funcoes similares.Por exemplo, os CPLs e os sistemas de supervi-sao sao de diferentes fabricantes em cada planta-piloto, sendo todos estes de uso corrente na indus-tria. Essa caracterıstica fortalece o aprendizado deconceitos fundamentais e normatizados, em detri-mento de especificidades de um ou de outro fabri-cante. O mesmo vale para os sensores e atuadoresque utilizam tecnologias diferentes (por exemplo,instrumentacao analogica na Estufa e no MICAe instrumentacao digital em rede no STEC), eque podem ser analisados e comparados tanto sobo ponto de vista do princıpio de funcionamentoquando do metodo de transmissao de dados. Alemdisso, as plantas-pilotos mantem suas caracterısti-cas individuais onde e possıvel configurar, operare desenvolver projetos de controle. Dessa forma,os estudantes ficam aptos a selecionar, operar emodificar equipamentos e ferramentas de softwareadequadas para os nıveis de controle e automacaode processos.
As caracterısticas de maior potencial destaplataforma sao a capacidade de armazenamentode dados do historiador e a possibilidade de de-senvolvimento de aplicacoes que cobrem o nıvel 3da piramide de automacao, incluindo aplicacoesde controle e automacao via web. Os dados dohistoriador sao armazenados em bancos de dadostemporal e podem ser apresentados em forma degraficos de tendencia, relatorios ou ainda exporta-dos para bancos de dados relacionais. A estruturade comunicacao cliente-servidor OPC, associadaas informacoes contidas nos bancos de dados, pos-sibilita o desenvolvimento de aplicativos para, porexemplo, reconciliacao de dados, controle estatıs-tico de processo e funcoes de correlacao, calculo eanalise de ındices de desempenho, e tecnicas avan-cadas de otimizacao e controle de processos. Por-tanto, os estudantes poderao reunir informacoespara fazer julgamentos de engenharia e apresen-tar solucoes para problemas reais de integracaode sistemas de controle, automacao e gestao deprocessos.
7 Conclusao
A plataforma integrada para ensino de tecnicasde controle e automacao e composta por diferen-tes sistemas, resultando em uma arquitetura com-plexa e hierarquizada. A integracao dos compo-nentes seguiu a hierarquia proposta pela normaISA-95 para sistemas de automacao e resultou emuma estrutura coesa e eficaz. O processo de inte-gracao ampliou as possibilidades de uso didaticodas plantas-piloto, mantendo suas caracterısticasindividuais. A plataforma integrada possibilita ofluxo de dados entre os diversos nıveis da piramidede automacao e cria um ambiente para o desen-volvimento de projetos que favorecem a aprendi-zagem de um amplo escopo de temas nas areas decontrole e automacao. Dessa forma, a utilizacaodos recursos da plataforma contribui com a forma-cao de engenheiros em sintonia com as tecnologiasmais recentes nas areas de controle e automacao, eincentiva o exercıcio da criatividade na resolucaode problemas do mundo real.
Por fim, a plataforma integrada permitira aosalunos do curso de Engenharia de Controle e Au-tomacao o contato direto com uma ferramenta degestao de informacoes de processos industriais am-plamente utilizada no mercado, bem como o de-senvolvimento de experimentos que possibilitemuma visao integrada da piramide de automacao,especialmente no que concerne ao fluxo de dadosentre os nıveis de gestao e de controle. Este con-tato e experimentos sao, na opiniao dos autores,insubstituıveis para a formacao de um engenheirode controle e automacao.
Referencias
Achy, A., de Barros Fontes, A., Garcia, M. R. S.and Lepikson, H. (2012). Avaliacao de tec-nicas de controle utilizando uma plataformamultivariavel de controle de nıvel desenvol-vida para o ensino e pesquisa, XIX CongressoBrasileiro de Automatica, CBA 2012.
ANSI/ISA-95.00.03 (2005). Enterprise controlsystem integration part 3: Activity models ofmanufacturing operations management, ISA-The Instrumentation, Systems and Automa-tion Society.
Bassett, R. R. (2012). Historian best practi-ces: distilling the truth, Automation Worldpp. 30–54.
Becerra, K. and Palacios, G. (2003). Conver-ting raw data into information - the CEMEXPIMS approach, Cement Industry TechnicalConference, 2003. Conference Record. IEEE-IAS/PCA 2003.
Bejan, C., Iacob, M. and Andreescu, G. (2009).SCADA automation system laboratory, ele-
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1417
ments and applications, SISY’09 Internati-onal Symposium on Intelligent Systems andInformatics.
Braga, A. R., Passos, L. F., Jr, C. G. and Brada,C. M. P. (2008). Projeto e implementacaode um modulo didatico para abordagem in-tegrada de instrumentacao, controle e auto-macao, Congresso Brasileiro de Automatica -CBA.
Carvalho, N. L. (1998). Projeto e implementa-cao de um sistema de tanques para controlede nıvel, vazao e temperatura usando tecno-logia fieldbus., Master’s thesis, UniversidadeFerderal de Minas Gerais.
Costa, M. S. and Amaral, J. L. M. (2012). Analisede redes sem fio industriais ISA100 xWirelessHart, InTech America do Sul 140: 61–67.
Eren, H. (2012). Historian best practices: dis-tilling the truth, IEEE Sensors ApplicationsSymposium (SAS).
Feisel, L. D. and Rosa, A. J. (2005). The role ofthe laboratory in undergraduate engineeringeducation, Journal of Engineering Educationpp. 121–130.
Gungor, V. C. and Hancke, G. P. (2009). In-dustrial wireless sensor networks: Challen-ges, design principles, and technical appro-aches, IEEE Transactions on Indutrial Ele-tronics 56.
Huff, G. and Mynster, H. (2004). Process datahistorian improves business, Control Engine-ering 51: 37.
Lee, G. H. and Jung, S. (2008). Design and con-trol of an inverted pendulum system for in-telligent mechatronics system control educa-tion, IEEE/ASME International Conferenceon Advanced Intelligent Mechatronics.
Moor, S. S., Piergiovanni, P. R. and Metzger, M.(2005). Process control kits: A hardware andsoftware resource, 35th ASEE/IEEE Fronti-ers in Education Conference.
Nogueira, L. G., Nogueira, F. G., JR, W. B. andSilva, O. F. (2012). Modulo didatico de si-mulacao de sistemas de primeira e segundaordem, XIX Congresso Brasileiro de Auto-matica, CBA 2012.
Oliveira, E. M., Carneiro, M. V. and de Oli-veira Junior, H. G. (2013). Otimizacao demalhas de controle via estimativa de parame-tros online no PIMS: aplicacao pratica em umforno de tratamento termico, 17o Seminariode Automacao e TI, Associacao Brasileira deMetalurgia, Materiais e Mineracao (ABM).
OSIsoft (2013). http://www.osisoft.com/templates/pi-system-solutions.aspx?id=1674.
Pereira, C. E., Paladini, S. and Schaf, F. M.(2012). Control and automation enginee-ring education: combining physical, remoteand virtual labs, 9th International multi-conference os Systems, signals and devices.
Persechini, M. A. M. and Jota, F. G. (2013). Cen-tralizes and distributed control architecturesunder foundation fieldbus network, ISA tran-sactions 52: 149–161.
Samad, T., McLaughlin, P. and Lu, J. (2007). Sys-tem architecture for process automation: Re-view and trends, Journal of Process Control9(17): 191–201.
Santos, R. V. P. (2013). Implementacao de fer-ramenta PIMS para integracao de laborato-rio e plantas piloto, Monografia de Final deCusro; Engenharia de Controle e Automacao;UFMG.
Silva, J. L. N. and Erick A. Ribeiro (2012). Umaplataforma multipropositos para ensino deautomacao e redes industriais, XIX Con-gresso Brasileiro de Automatica, CBA 2012.
Sopko, M. and Winegardner, K. (2007). Processcontrol network security concerns and reme-dies, IEEE Cement Industry Technical Con-ference Record, pp. 26–37.
Souza, R. D., Correia, E. J. M. and Neto, E. R.(2009). Projeto PIMS do patio de minerios –uma poderosa ferramenta de apoio a manu-tencao, XX Seminario Espırito-Santense deManutencao.
Vallim, M. B. R., Farines, J.-M. and Cury, J. E. R.(2006). A curriculum framework for under-graduate degree in control and automationengineering, Decision and Control, 2006 45thIEEE Conference on, pp. 3090–3895.
Wollenberg, B. and Mohan, N. (2010). The impor-tance of modern teaching labs, IEEE powers& energy magazine pp. 44–52.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1418





























