Embed Size (px)
Citation preview

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
International Journal of Humanoid RoboticsVol. 7, No. 1 (2010) 127–156c© World Scientific Publishing CompanyDOI: 10.1142/S021984361000199X
WALKING PATTERN MAPPING FROM IMPERFECT MOTIONCAPTURE DATA ONTO BIPED HUMANOID ROBOTS
JUNG-YUP KIM∗ and YOUNG-SEOG KIM†
Assistant Professor, Humanoid Robot Research Laboratory,School of Mechanical Design and Automation Engineering,
Seoul National University of Technology,
138 Gongrung-gil, Nowon-gu, Seoul 139-743, South Korea∗[email protected]
Received 20 October 2008Accepted 7 July 2007
This paper proposes an efficient walking pattern mapping algorithm from motion capturedata onto biped humanoid robots. Currently, the technology known as human motioncapture is widely utilized to generate various humanlike motions in many applications,including robotics. An important thing is that several difficulties are associated withmotion capture data. These include a data offset issue, noise, and drift problems dueto measurement errors caused by imperfect camera calibration, and marker position.If a biped robot uses motion capture data without suitable post-processes, the walkingmotion of the robot will differ from an actual walking motion, and the Zero Moment Point(ZMP) will be asymmetrical and noisy, leading to unstable walking. A further difficultyexists in the walking pattern mapping process due to the different joint numbers, linksizes, and weights between a human and a robot. Although walking pattern mapping issuitable after addressing the above difficulties, a slip problem between the feet and theground can continue to cause problems. To solve these difficulties efficiently, a Fourier
fitting method is proposed in this research. Improvements of walking pattern and theZMP trajectory are confirmed using the proposed method. Furthermore, a geometricmapping method is introduced to generate walking patterns for various biped robotswhile maintaining a degree of similarity to humans. By applying a no-slip constraintto the feet and modifying the joint angles through inverse kinematics, the slip problemis also solved. The effectiveness of the proposed algorithm is verified through computersimulations of two different biped robots that have different sizes, weights, walking cycles,and step lengths.
Keywords: Walking pattern; motion capture; biped humanoid robot; computersimulation.
1. Introduction
Recently, the number of humanoid or android robots that seek to utilize human-like motions is increasing rapidly. Slow humanlike motions can be intuitively andmanually generated via computer simulations. However, it is not easy to generatedynamic humanlike motions such as biped walking, dancing, and running manually.
127

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
128 J.-Y. Kim & Y.-S. Kim
For dynamic humanlike motions, human motion capture has become an essentialtechnique. Initially, human motion capture was utilized in the computer animationfield to generate realistic human motions without any difficulties. Many researchersin this field have conducted research on motion generations of human figures.Unema et al.1 proposed a method for modeling human figure locomotions withemotions. They utilized the Fourier expansions of human motion data for interpola-tion, extrapolation, transition, and superposition so that variations of simple humanbehaviors can be effectively generated while maintaining characteristics of humanbehaviors. Bruderlin et al.2 introduced multi-resolution motion filtering based onband pass filters, multi-target motion interpolation with dynamic time-warping,wave-shaping and motion displacement mapping. These techniques were appliedto designing, modifying and adapting animated motion. Gomes et al.3 presented anovel mathematical framework to study motion paths, based on the characterizationof the motion signal by the variable nature of its harmonic contents. Yamane et al.4
developed a dynamic filter which is an online full-body motion generator. It convertsa physically infeasible reference motion into a feasible motion for a human figure.Tak et al.6 proposed an optimization method that modifies the original motionto correct the ZMP by imposing ZMP constraints. Lee et al.7 developed an opti-mization method and controller learning algorithm that minimizes tracking errorsand transforms any biped motion into a physically feasible, balance-maintainingsimulated motion.
Recently, human motion capture was also utilized for simple physical models.8
Moreover, in the humanoid robotics field, human motion capture has been animportant technique for generating humanlike motions. Many robotics researchersare investigating humanlike motion generation by using human motion capture.Miyamoto et al.9 demonstrated motion capture and learning by watching by usingbi-directional theory in robotics. They utilized their methods for the SARCOS Dex-trous Slave Arm, which has a very similar kinematic structure to the human arm.Pollard et al.10 derived a humanlike upper body humanoid motion by modifyingthe human motion capture data in consideration of the joint angle limits, a Gimballock, and the velocity limits. Huang et al.11 derived a humanlike walking pattern byusing third-order-spline interpolation of feature points that were derived by humanmotion capture. Ha et al.12 derived a natural and stable walking pattern from thesequential images of the human gait and the Genetic Algorithm (GA) that usedthe joint torque energy of a human and the ZMP. Dasgupta et al.13 designed adesired ZMP trajectory and modified the human motion capture data by using theoptimized Fourier series compensatory torso motion that minimizes the ZMP error.Nakaoka et al.14 realized a dance performance by an actual biped humanoid robot.They acquired dance motions through a motion capture system, and extracted sev-eral primitive motions. The joint angle trajectories were modified to satisfy themechanical constraints and the waist trajectory was moved to maintain balance byusing the ZMP. Imai et al.15 developed a human motion capturing system witha myoelectrical measurement. They analyzed joint angle trajectories and a torque

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
Walking Pattern Mapping from Imperfect Motion 129
direction, and then developed a control method for biped walking. Furthermore, aresearch on naturalness of humanoid movements has been conducted in terms of apsychovisual evaluation.16
In this paper, we would like to focus on the captured human motion, particularlythe walking pattern generations of biped humanoid robots. In this approach, thereare three areas of difficulty. The first involves the measurement error of the motioncapture process. The second is the difficulty of mapping the walking pattern onto adifferent body. The third difficulty is the slip phenomenon between the supportingfoot and the floor in a generated walking pattern. These problems are not consideredseriously in the computer graphics or animations in terms of walking stability andactuator performance. However, if these problems are not addressed in real bipedrobots, the biped robots may walk unstably and asymmetrically with a low degreeof human-similarity or they may even fall down. Therefore, it is necessary to developan efficient algorithm that can easily resolve these difficulties and generate a suitablewalking pattern for biped humanoid robots that have different weights, dimensions,walking cycles, and step lengths.
This paper proposes an efficient walking pattern mapping algorithm from humanmotion capture for biped humanoid robots (Fig. 1). In particular, the Fourier fitting
Fig. 1. A flow chart of a proposed walking pattern mapping algorithm.

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
130 J.-Y. Kim & Y.-S. Kim
and geometric mapping methods are utilized with inverse kinematics to solve thedifficulties effectively and easily. The Fourier fitting has the following advantages.
(i) It is easy to eliminate undesirable low frequency fluctuations, offsets, drifts,and high frequency noises from the motion capture data.
(ii) It is easy to change the walking cycle by modifying the fundamental frequencyof the Fourier fitted walking pattern
(iii) It is possible to independently give a weighting factor to a particular frequency.(iv) It is possible to produce the same trajectories with different phases.
A simplified human model was built to tune the proposed method iteratively bychecking the ZMP and the walking pattern. According to the procedure of Fig. 1,this paper is organized as follows: In Sec. 2, a standard human walking patternis derived through motion capture data, Fourier fittings and computer simulationswith a simplified human model. In Sec. 3, a walking pattern for a target biped robotis obtained by a geometric mapping method, regenerations of ankle orientation tra-jectories and pelvis center translational motions, and a no-slip constraint. As a test,walking patterns are generated for two different biped robots, and then computersimulations are also performed to verify and evaluate the algorithm. Finally, Sec. 4concludes the paper with a discussion and suggestions for future research.
2. Standard Human Walking Pattern Derivation
As a first step, it is necessary to perform a motion capture, and process the motiondata in order to derive a standard human walking pattern. This section addresses aneffective procedure that can derive a standard walking pattern that is dynamicallystable, humanlike, and easily changeable by solving the several difficulties mentionedearlier.
2.1. Motion capture data of human walking
Human walking motion was captured by using a VICON system. The actor usedin motion capture was 174 cm tall, and weighed 86 kg. He walked normally on thefloor at a walking speed of 52m/min with a step length of 0.55m and a step timeof 0.64 second. Figure 2 shows a snapshot of the human walking with an interval of1 sec. Some 41 markers were attached to the actor’s body, and the system capturedhuman walking motions at a rate of 120 frames per second. After the actor walked ata normal speed, an ASF file that outlined the actual skeleton and its hierarchy andan AMC file that contained the motion data were derived. As a result of the motioncapture, Fig. 3 shows the twelve joint angle trajectories of the lower body. Thepositive direction of each angle trajectory followed the orientation of the Cartesianworld coordinate in Fig. 2. However, in the hierarchy of the ASF file, there are 56DOFs in total and seven DOFs are allocated to each leg: the hip pitch/roll/yaw

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
Walking Pattern Mapping from Imperfect Motion 131
OXYZ : World Coordinate Frame
(leftwards)
(forwards)
(upwards)
O
Fig. 2. Human walking motion capture using the VICON system. A human walked normally inX-direction at a walking speed of 52 m/min.
joints, the knee pitch joint, the ankle pitch/roll joints, and the toe joint. The jointsof the upper body and the toe joints of the lower body were ignored because thispaper is mainly focused on only the walking motion of the lower body and thetarget robots did not have toe joints. The toe joint will be discussed further later.In addition, the VICON system provided the translation trajectories of the rootpoint that was equal to the pelvis center in the Cartesian world coordinate (Fig. 4).
2.2. Difficulties in motion capture data
When we closely look at Figs. 3 and 4, it is observed that the trajectories have someundesirable phenomena. In Fig. 3, the right/left hip and knee pitch trajectories havedifferent offsets, and all trajectories have some amount of noise. In addition, the leftknee pitch trajectory exceeded a lower limit. In Fig. 4, the leftward pelvis center(PCY) trajectory shows undesirable fluctuations at a low frequency, the upwardpelvis center (PCZ) trajectory has an undesirable drift, and all the pelvis centertrajectories have some offset values. For example, the forward pelvis center (PCX)trajectory started at approximately −2m, not zero. Therefore, it was assumed thatthese phenomena were due to measurement errors, which included camera calibra-tion errors and marker position errors on the actor’s body.
Another issue was the angular offsets in the hip roll and ankle roll trajectoriesdue to the inclined linkage configurations. In Fig. 3, the right and left hip roll trajec-tories of the motion capture data have initial offsets that have the same amount withopposite signs as the human pelvis center position is located at a position higherthan the hip position. Therefore, as Fig. 2 clearly shows, the linkages between thepelvis center and the hips are basically inclined at an angle. On the other hand, the

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
132 J.-Y. Kim & Y.-S. Kim
0 0.5 1 1.5 2 2.5-50
0
50A
ngle
[deg
]Right Hip Roll Joint
Left Hip Roll Joint
0 0.5 1 1.5 2 2.5-40
-20
0
20
Ang
le [d
eg]
Right Hip Pitch Joint
Left Hip Pitch Joint
0 0.5 1 1.5 2 2.5-50
0
50
Ang
le [d
eg]
Right Hip Yaw Joint
Left Hip Yaw Joint
0 0.5 1 1.5 2 2.5
0
50
100
Ang
le [d
eg]
Right Knee Pitch Joint
Left Knee Pitch Joint
0 0.5 1 1.5 2 2.5
-20
0
20
40
60
Ang
le [d
eg]
Right Ankle Roll Joint
Left Ankle Roll Joint
0 0.5 1 1.5 2 2.5-40
-20
0
20
Time [sec]
Ang
le [d
eg]
Right Ankle Pitch Joint
Left Ankle Pitch Joint
Fig. 3. Joint angle trajectories of the lower body as a result of motion capture. Different offsetsand shapes between both legs, and noises were observed in each joint.
pelvis centers of target biped robots are located at the center position between thehip joints. In other words, the hip joints and pelvis center are located at the sameheight without any inclination. Accordingly, the generation of new hip roll jointtrajectories was done by using the lateral trajectory of the pelvis center. Assumingthat the walking motion is a simple inverted pendulum, as shown in Fig. 5, it is easyto calculate the right and left hip roll angles according to the lateral translational

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
Walking Pattern Mapping from Imperfect Motion 133
0 1 2 3 4 5 6 7-4
-2
0
2
4D
ispl
acem
ent [
m]
0 1 2 3 4 5 6 70
0.05
0.1
Dis
plac
emen
t [m
]
0 1 2 3 4 5 6 70.9
0.95
1
Time [sec]
Dis
plac
emen
t [m
]Pelvis Center-X (forwards)
Pelvis Center-Y (leftwards)
Pelvis Center-Z (upwards)
Fig. 4. Translational trajectories of the pelvis center as a result of motion capture. Undesirabledrift, offset and low-frequency fluctuation problems were observed.
rollhipθ
YPC
l
Fig. 5. Modeling of walking motion using an inverted pendulum on the Coronal plane.
trajectory of the pelvis center, as follows:
θhip roll = sin−1
(PCY
l
). (1)
In addition, the right and left ankle roll trajectories in Fig. 3 also have oppositeinitial offsets because the human calf is initially inclined against a vertical line, asshown in Fig. 6. However, the target biped robots do not use initial inclinations ofthe calf linkages because a vertical configuration for both legs is more suitable fora large supporting area. Hence, for the upright posture of the upper body on the

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
134 J.-Y. Kim & Y.-S. Kim
Fig. 6. Initial angular offset at the ankle roll joint of a human.
Coronal plane, the legs were made parallel to the floor by giving the same valuewith an opposite sign to the right and left ankle roll joints, as follows:
θankle roll = −θhip roll. (2)
In this way, it was possible to solve the hip roll and ankle roll initial offset prob-lems by modifying the human motion data for the target biped robots. However,in order to address the difficulties due to the measurement errors, it remains neces-sary to develop an effective, easy, and efficient method for standard human walkingpattern generation. Figure 7 shows the ZMP trajectories without any modificationsexcept for the hip and ankle roll trajectories. The left figure represents the X andY-components of the ZMP over time while the right figure shows the ZMP and theprojected right and ankle trajectories on the floor. The ZMP trajectories are clearlyvery noisy and asymmetrical, and have offsets and drift in the lateral Y-direction,and the right and left ankle positions are slipping on the floor. If these problemsare not addressed, it will be difficult to derive a suitable standard human walkingpattern that can be utilized for the walking patterns of the target robots.
2.3. Fourier fitting of motion capture data
As the walking pattern is a periodic motion, it is possible to represent the periodictrajectories as a Fourier series, which are combinations of sine and cosine functions,as follows:
f(k) = a0 +n∑
i=1
{ai cos(iωk) + bi sin(iωk)}. (3)
Here, a0 denotes a constant term in the data and is associated with the i = 0cosine term, ω is the fundamental frequency of the signal, and n is the number of

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
Walking Pattern Mapping from Imperfect Motion 135
0.5 1 1.5 2 2.5
0
0.5
1
1.5
2
2.5
Time [sec]
Dis
pla
cem
en
t [m
]
XzmpYzmp
0 1 2 3 4 5-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
X [m]
Y [
m]
Right Ankle Position on FloorLeft Ankle Position on FloorZMP
Fig. 7. ZMP trajectories without any modification. A suitable post-process is required to derive astandard human walking pattern.
terms (harmonics) in the series. There are several advantages of the Fourier series.First, it is easy to eliminate unwanted noises by selecting an appropriate valueof n. Second, it is easy to adjust the offset by modifying a0. Third, it is easy toeliminate low frequency drift by excluding the sine and cosine combinations at alow frequency. Fourth, it is easy to change the walking cycle by modifying ω. Here,the relationships among the fundamental frequency ω, the walking cycle, the steptime and the sampling time (1/120 sec) are represented as follows:
Walking Cycle [sec] = 2 × Step Time [sec],
Step Time = (π/ω) · Sampling Time.(4)
The advantages of the Fourier series are its effectiveness in solving the offset,noise, and drift problems due to the measurement errors. Alternatively, the typicalhigh or low or band pass filters can also be considered, but they cannot changethe fundamental frequency of the motion capture data to modify the walking cycle.Furthermore, they cannot change the amplitude of the motion capture data at aparticular frequency, cause the time-delay, and they don’t have ideal cut-off fre-quencies. Therefore, in this paper, Fourier fitting is proposed in order to derive astandard human walking pattern that can be utilized for biped robots. The Fourierfitting for each trajectory is easily conducted through the use of MATLAB. Oneadditional advantage of a Fourier fitting in generating a walking pattern is that itis easy to precisely generate the same patterns with different phases. That is, afterderiving a walking pattern for the right leg, it is also possible to derive a walkingpattern for the left leg by adding a phase shift of 180 degrees, as follows:
f(k) = a0 +n∑
i=1
{ai cos(i(ωk + π)) + bi sin(i(ωk + π))}. (5)
In Fig. 3, the left knee pitch trajectory has periodic flat sections because the tra-jectory exceeded the lower limit of the knee pitch joint due to an inaccurate markerposition. Accordingly, Fourier fittings were conducted for the joint trajectories of

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
136 J.-Y. Kim & Y.-S. Kim
0 0.5 1 1.5 2 2.5-5
0
5
Ang
le [d
eg] Right & Left Hip Roll Joint
0 0.5 1 1.5 2 2.5-40
-20
0
20
Ang
le [d
eg]
Right Hip Pitch Joint
Left Hip Pitch Joint
0 0.5 1 1.5 2 2.5-1
0
1
Ang
le [d
eg] Right & Left Hip Yaw Joint
0 0.5 1 1.5 2 2.50
50
100
Ang
le [d
eg]
Right Knee Pitch Joint
Left Knee Pitch Joint
0 0.5 1 1.5 2 2.5-5
0
5
Ang
le [d
eg] Right & Left Ankle Roll Joint
0 0.5 1 1.5 2 2.5-30
-20
-10
0
10
Time [sec]
Ang
le [d
eg]
Right Ankle Pitch Joint
Left Ankle Pitch Joint
Fig. 8. Joint angle trajectories after Fourier fitting. The problems were effectively solved.
the right leg first and they were then utilized for the left leg. Figure 8 and Table 1show the results of the Fourier fitting of the joint trajectories and the several Fourierfitting data. In Fig. 8, the offsets between both legs are identical, and the trajecto-ries are sufficiently smooth. It is observed that the offset and noise problems weresolved in the fitted trajectories without any large differences between the originaland fitted trajectories. For the hip yaw joints, zero was intentionally set to preventpelvis rotation by the robots about the Z axis while walking. During human walk-ing, a human rotates the pelvis about the vertical axis. However, this motion wasignored at this stage. Figure 9 shows the result of the Fourier fitting of the pelvis

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
Walking Pattern Mapping from Imperfect Motion 137
Table 1. Coefficients of Fourier fitting for the hip, knee, and ankle pitch joints.
ω = 0.04108 Hip Pitch Joint Knee Pitch Joint Ankle Pitch Joint
a0 −15.75 29.68 −14.32a1 −7.828 18.59 2.959b1 −18.41 0.05568 1.317a2 −4.645 13.66 0.2474b2 −3.093 −5.754 −5.443a3 −1.46 4.142 1.226b3 1.499 −4.534 −2.123a4 −0.3709 0.6467 −1.047b4 −0.1983 0.635 0.6677a5 0.0 −1.154 −1.235b5 0.0 −0.0525 1.652
a6 0.0 0.0 −0.7071b6 0.0 0.0 0.5217
0 1 2 3 4 5 6 70
2
4
6
Dis
plac
emen
t [m
]
0 1 2 3 4 5 6 7-0.05
0
0.05
Dis
plac
emen
t [m
]
0 1 2 3 4 5 6 70.94
0.96
0.98
1
Time [sec]
Dis
plac
emen
t [m
]
Pelvis Center-X (forwards)
Pelvis Center-Y (leftwards)
Pelvis Center-Z (upwards)
Fig. 9. Translational trajectories of the pelvis center after Fourier fitting. The problems were alsosolved.
center trajectories in the Cartesian space. In this figure, the X-component of thepelvis center trajectory was generated through the use of Fourier fitting and cubicpolynomial fitting because it is composed of both curved and oscillatory sections.
Forward pelvis center trajectory = Curve section + Oscillation section. (6)
Figure 10 shows the process of fitting for the X-component of the pelvis centertrajectory. The first figure represents the original pelvis center trajectory and thecubic polynomial fitting of this trajectory. In this figure, the original pelvis center

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
138 J.-Y. Kim & Y.-S. Kim
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.90
0.2
0.4
0.6D
isp
lace
me
nt [
m]
PC-XCubic Polynomial Fitting of PC-X
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
-0.02
0
0.02
Dis
pla
cem
en
t [m
] Oscillation SectionFourier Fitting of Oscillation Section
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.90
0.2
0.4
Time [sec]
Dis
pla
cem
en
t [m
] Cubic Polynomial Fitting of PC-X + Fourier Fitting of Oscillation Section
Fig. 10. Process of fitting of the pelvis center-X trajectory.
trajectory is clearly fluctuating with respect to the cubic polynomial fitting. Thesecond figure shows the oscillation section, which was derived by subtracting thecubic polynomial fitting from the original pelvis center trajectory, and the Fourierfitting of the oscillation section. The last figure is the final X-component of thepelvis center trajectory, which is composed of the cubic polynomial fitting and theFourier fitting of the oscillation section.
2.4. ZMP Calculation of motion capture data
In this part, a ZMP trajectory of the actor that was used in the motion capture wasderived to verify the stability and effectiveness of the standard humanlike walkingpattern derived via Fourier fitting earlier. In order to draw a ZMP trajectory, it isnecessary to measure the dimensions, masses and mass centers of the body partsof the actor and then input these data into the simplified human model shown inFig. 11 and the following ZMP equations.5,6,17
xZMP =
∑i
{mi(zi + g)xi} −∑i
mizixi −∑i
Iiy θiy∑i
mi(zi + g)
yZMP =
∑i
{mi(zi + g)yi} −∑i
miziyi −∑i
Iixθix∑i
mi(zi + g).
(7)

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
Walking Pattern Mapping from Imperfect Motion 139
Fig. 11. Parts of the human body, adapted from Ref. 18.
Here, xi, yi, and zi represent the position vector of the mass center of the ithlink, mi is the mass of the ith link, Ii is the mass moment of inertia of the ithlink, and g denotes the gravitational acceleration. It was easy to derive the linklengths in the motion capture data file, while it was not easy to define the massesat appropriate mass centers. Eventually, it was possible to obtain reasonable esti-mates of them by referring to data from an anthropometry.18 Table 2 and Fig. 11show the mass distribution and names of parts of the human body. 100 percent indi-cates the total mass of a human. An interesting aspect here is that the percentagesof the upper body and the lower body are nearly identical. Figure 12 represents themass center positions of the body parts. According to this data, the masses andthe mass centers of the simplified human model, which was equivalent to the actor,were defined. Additionally, a point mass of the upper body, which weighed 49.6% ofthe total mass, was also placed at the mass center of the thorax. Table 3 shows thedimensions and mass distribution of the simplified human model shown in Fig. 13,which corresponds to the actor.
By using the above data, a ZMP trajectory of the simplified human model canbe derived. In order to eliminate noise when calculating the numerical acceleration
Table 2. Mass distribution of the human body, adapted from Ref. 18.
Upper Body Head 5.2 % Lower Body Pelvis 14.5 %Neck 1.3% Thigh 12.0 × 2 = 24.0%Thorax 30.6% Calf 4.7 × 2 = 9.4%Abdomen 3.0% Foot 1.2 × 2 = 2.4%Upper Arm 2.5 × 2 = 5%Fore Arm 1.7 × 2 = 3.4%Hand 0.6 × 2 = 1.2%
Total 49.6% 50.3%

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
140 J.-Y. Kim & Y.-S. Kim
Fig. 12. Mass center positions of the human body, adapted from Ref. 18.
Table 3. The dimensions and mass distribution of the simplified human model, adapted fromRef. 18.
Dimensions (total height : 174 cm)
COM of Upper 31.5 cm above from Lower Body HIP-HIP 17.07 cmBody the pelvis center HIP-KNEE 41.785 cm
KNEE-ANKLE 41.785 cmANKLE-FOOT 5 cmFOOT LENGTH 20 cm
Mass Distribution(total mass: 86 kg)
Upper Body 42.656 kg Lower Body PELVIS 12.47 kgTHIGH 10.32 kgCALF 4.04 kgFOOT 1.03 kg
Total 49.6% 50.3%
vectors of each mass center, 5-Hz low pass filters were added because the maximumfrequency of the Fourier series in Figs. 8 and 9 was 4.7Hz. In addition, it became nec-essary to define some stable boundaries in order to confirm waking stability. Hence,the stable boundary was defined according to the following proposition adaptedfrom Ref. 5. The only a difference between our proposition and Ref. 5 is that we didnot consider ground contact because motion capture data does not provide data ofthe ground reaction forces.

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
Walking Pattern Mapping from Imperfect Motion 141
Knee pitch joint
Ankle roll/pitch joint
Hip roll/pitchjoint
Yaw
PitchRoll
Hip yaw joint
Pelvis Center
Fig. 13. A simplified human model with 12 DOF.
A proposition for a walking stability criterion regardless ofground contact: A legged walking motion is assumed to be stable ifthe ZMP strictly exists within the stable boundary derived from bothprojected foot areas on the ground, regardless of the foot contacting theground, as shown in Fig. 14.
If a walking motion satisfies the proposition, it can be assumed to lead to stablewalking. The ZMP trajectory of the standard human walking pattern derived inSec. 2.3 is represented in Fig. 15. The left figure shows the X and Y-components ofthe ZMP over time, while the right figure shows the ZMP trajectory on the floor with
Stable boundary
Projected right foot
areaStableZMP
UnstableZMP
Projected left foot
area
Projected foot area : projected foot area to the groundregardless of contact of the foot with the ground
Fig. 14. The proposition of a walking stability criterion.
March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
142 J.-Y. Kim & Y.-S. Kim
0.5 1 1.5 2 2.5
0
0.5
1
1.5
2
2.5
Time [sec]
Dis
pla
cem
en
t [m
]
XzmpYzmpStable Boundaries
0 1 2 3 4 5-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
X [m]
Y [
m]
Right Ankle Position on FloorLeft Ankle Position on FloorZMPStable Boundaries
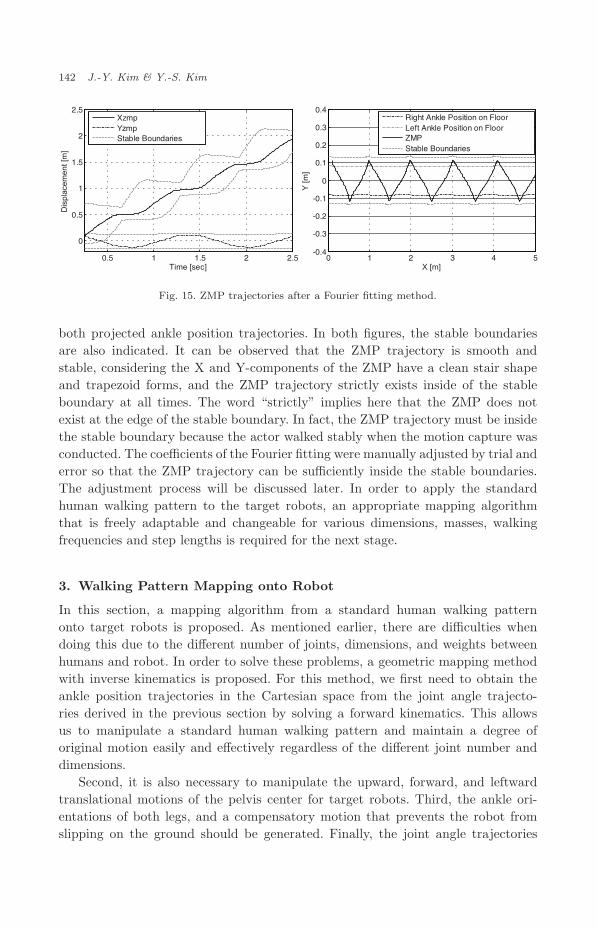
Fig. 15. ZMP trajectories after a Fourier fitting method.
both projected ankle position trajectories. In both figures, the stable boundariesare also indicated. It can be observed that the ZMP trajectory is smooth andstable, considering the X and Y-components of the ZMP have a clean stair shapeand trapezoid forms, and the ZMP trajectory strictly exists inside of the stableboundary at all times. The word “strictly” implies here that the ZMP does notexist at the edge of the stable boundary. In fact, the ZMP trajectory must be insidethe stable boundary because the actor walked stably when the motion capture wasconducted. The coefficients of the Fourier fitting were manually adjusted by trial anderror so that the ZMP trajectory can be sufficiently inside the stable boundaries.The adjustment process will be discussed later. In order to apply the standardhuman walking pattern to the target robots, an appropriate mapping algorithmthat is freely adaptable and changeable for various dimensions, masses, walkingfrequencies and step lengths is required for the next stage.
3. Walking Pattern Mapping onto Robot
In this section, a mapping algorithm from a standard human walking patternonto target robots is proposed. As mentioned earlier, there are difficulties whendoing this due to the different number of joints, dimensions, and weights betweenhumans and robot. In order to solve these problems, a geometric mapping methodwith inverse kinematics is proposed. For this method, we first need to obtain theankle position trajectories in the Cartesian space from the joint angle trajecto-ries derived in the previous section by solving a forward kinematics. This allowsus to manipulate a standard human walking pattern and maintain a degree oforiginal motion easily and effectively regardless of the different joint number anddimensions.
Second, it is also necessary to manipulate the upward, forward, and leftwardtranslational motions of the pelvis center for target robots. Third, the ankle ori-entations of both legs, and a compensatory motion that prevents the robot fromslipping on the ground should be generated. Finally, the joint angle trajectories

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
Walking Pattern Mapping from Imperfect Motion 143
of target robots are calculated from the obtained ankle position and orientationtrajectories by solving inverse kinematics.
3.1. Fourier fitting of ankle position trajectory in the Cartesian
space
In order to derive the ankle position trajectories, the forward kinematic equationsof the simplified human model were initially derived from the actor’s data. Modi-fications of the trajectories were then performed according to the dimension dataof the target robot. In this process, Fourier fitting was also utilized to representthe ankle position trajectories. Figure 16 shows the ankle position trajectories andtheir Fourier fittings with respect to the pelvis center. The left figure shows theright ankle position trajectories on the x − z (Sagittal) plane, and the right figureshows the right and left ankle position trajectories on the y − z (Coronal) plane.In these figures, the Fourier fittings are well matched to the original ankle positiontrajectories. The coefficients of the Fourier fittings of the right ankle trajectory arerepresented in Table 4. Hence, the results of the Fourier fittings are assumed asanother form of a standard human walking pattern and are utilized in the nextsections for the robot’s walking pattern.
3.2. Geometric mapping method
The ankle position trajectories derived in Sec. 3.1 require a modification because thedimensions of the biped robots are various and differ from those of the actor. Hence,three geometric feature points: step length, leg length and hip-to-hip length wereproposed to manipulate the trajectories on the Sagittal and Coronal planes. Then, asimple strategy was developed to modify the walking pattern, as shown in Fig. 17.In the upper two figures, the black lines are the right ankle position trajectoriesthat were derived from the standard human walking pattern (see Sec. 3.1). Thegray lines are the mapped right ankle position trajectories. PRF (k) and P′
RF (k)
-0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4-0.85
-0.8
-0.75
-0.7
-0.65
-0.6
x [m]
z [m
]
Right Ankle TrajectoryFourier Fitting of Right Ankle Trajectory
-0.1 -0.05 0 0.05 0.1
-0.8
-0.7
-0.6
y [m]
z [m
]
Right Ankle TrajectoryLeft Ankle TrajectoryFourier Fitting of Right Ankle TrajectoryFourier Fitting of Left Ankle Trajectory
Left AnkleRight Ankle
Fig. 16. The ankle position trajectories and their Fourier fittings.

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
144 J.-Y. Kim & Y.-S. Kim
Table 4. The coefficients of Fourier fittings of the right ankle
position trajectory.
ω = 0.04108 x-component y-component z-component
a0 0.01471 −0.083834 −0.77504a1 −0.01622 −0.03837 0.058b1 0.2555 −0.01435 0.004408a2 −0.02717 0.001267 0.01325b2 0.07605 0.0001637 −0.0128a3 −0.008636 0.0003503 0.001705b3 0.004372 −0.0004213 −0.0172a4 −0.001241 0.0 0.002121b4 −0.005575 0.0 −0.007887a5 0.006707 0.0 −0.0003441
b5 −0.001425 0.0 −0.00272a6 −0.000924 0.0 0b6 −0.0003759 0.0 0
are the standard and mapped kth discrete right ankle position vectors with respectto the pelvis center as follows:
PRF (k) =
xRF (k)
yRF (k)zRF (k)
=
a0x +nx∑i=1
{aix cos(iωk) + bix sin(iωk)}
a0y +ny∑i=1
{aiy cos(iωk) + biy sin(iωk)}
a0z +nz∑i=1
{aiz cos(iωk) + biz sin(iωk)}
, (8)
P′RF (k) =
x′RF (k)
y′RF (k)
z′RF (k)
=
αy ·
αx · xRF (k){a0y + β · (yRF (k) − a0y)}
αz · zRF (k)
. (9)
Here, αx, αy and αz are the ratios of the step length, the hip-to-hip lengthand the leg length between the actor and the target biped robot, respectively. Thedimension information of the actor used in the motion capture is known, as are thedimensions of the target robot. Hence, it is easy to calculate the aforementionedratios. Again, β is the manual tuning factor of the lateral ankle position trajec-tory. The Fourier series of the lateral ankle trajectory is composed of a constantoffset and an oscillation part with sine and cosine combinations. Here, it may benecessary to additionally adjust only the amplitude of the oscillation part withoutchanging the constant offset value if the lateral body swing amplitude is somewhatsmaller or larger than originally considered. Therefore, the additional coefficient β
was added to compensate the lateral body swing amplitude. The lower two figuresof Fig. 17 show the additional adjustment for the amplitude of the lateral ankleposition trajectory.

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
Walking Pattern Mapping from Imperfect Motion 145
Fig. 17. A geometric mapping for walking pattern modification. Trajectories are geometricallymodified in the Cartesian space by using several coefficients.
In this manner, the generation of a suitable walking pattern for a target bipedrobot is straightforward. As a test, walking patterns were generated for biped robotsthat had different dimensions, weights, step lengths, and walking cycles. Informationof the actor and the target robots (Albert HUBO, a child-sized humanoid, andBONOBO, a toy-sized humanoid (Fig. 18)) are summarized with the ratios and themanual tuning factor in Table 5. The step lengths and step times of the target robotswere determined arbitrarily by considering their heights. According to the data,the ratios αx, αy and αz were straightforwardly derived for each walking pattern.The fundamental frequency ω was also calculated by using Eq. (4). In particular,the manual tuning factor β was iteratively tuned by observing the lateral swingamplitude of the ZMP trajectory.
ZMP trajectories of the target biped robots were simulated under two assump-tions. One is that joint position control is perfect without any tracking error.The other is that walking control is also perfect so that the simulation robotcan follow a reference pelvis center trajectory in a world coordinate frame.

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
146 J.-Y. Kim & Y.-S. Kim
Fig. 18. Pictures of Albert HUBO and BONOBO.
Table 5. Walking pattern specifications of an actor, and the target robots.
Actor Albert HUBO BONOBO
Leg length 0.8357 m 0.6m 0.433mStep length 0.55 m 0.35 m 0.25 m
Step time 0.6373 sec 0.8 sec 0.7 secWeight 86 kg 57 kg 25.3 kgHip-to-hip length 0.1707 m 0.142m 0.11 m
αx 1.0 0.35/0.55 = 0.636 0.25/0.55 = 0.454
αy 1.0 0.142/0.1707 = 0.832 0.11/0.1707 = 0.644αz 1.0 0.6/0.8357 = 0.718 0.433/0.8357 = 0.518β 1.0 1.3 1.4ω 0.04108 0.0327 0.0374
Figures 19 and 20 show the ZMP trajectories with the projected ankle posi-tions and snapshots of the simulation robots’ stick figures. It is known that allof the ZMP values were strictly inside the stability boundaries. Hence the twowalking motions were assumed to be stable, according to the stability criterionproposed in Sec. 2.4. Consequently, it was possible to generate humanlike andstable walking patterns for the target biped robots. The proposed walking pat-tern is both humanlike and suitable in terms of open-loop walking stability. Thetranslational motions of the pelvis center and orientations of the ankle jointsused to draw the ZMP trajectory in the simulations are addressed in the nextsection.

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
Walking Pattern Mapping from Imperfect Motion 147
0.5 1 1.5 2 2.5-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Time [sec]
Dis
plac
emen
t [m
]
XzmpYzmpStable Boundaries
0 0.5 1 1.5 2 2.5 3 3.5
-0.2
-0.1
0
0.1
0.2
0.3
X [m]
Y [m
]
Right Ankle Position on FloorRight Ankle Position on FloorZMPStable Boundaries
0.5 1 1.5 2 2.5-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Time [sec]
Dis
plac
emen
t [m
]
XzmpYzmpStable Boundaries
0 0.5 1 1.5 2 2.5
-0.2
-0.1
0
0.1
0.2
0.3
X [m]
Y [m
]Right Ankle Position on FloorRight Ankle Position on FloorZMPStable Boundaries
Fig. 19. ZMP trajectories after geometric mapping of two different robots.
Fig. 20. 3D Snapshot of the stick figures (Albert HUBO, left and BONOBO, right).
3.3. Pelvis center translation and ankle orientation
In order to draw ZMP trajectories for the biped robots, the translational motions ofthe pelvis center are required. In Sec. 2, the pelvis center trajectories were derivedfrom the human motion data and their Fourier and polynomial fittings. The tar-get robot may have different dimensions, walking cycles, and step lengths; hence,

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
148 J.-Y. Kim & Y.-S. Kim
the forward, lateral, and vertical trajectories of the pelvis center were also propor-tionally adjusted according to the walking speed (= step length/step time), thehip-to-hip length, and the leg length ratios, respectively. In particular, for the for-ward pelvis trajectory of the target robots, the second and the third order termsof the cubic polynomial were ignored. Therefore, the forward pelvis center trajec-tory of the target robot was composed of a straight line section and an oscillationsection.
It is known that the functions of a heel strike and toe off motion of humans duringwalking include energy saving, extension of ground contact time, and absorption oflanding impact while walking. In the case of the biped robot, these three functionsare also important in terms of energy consumption, walking stability, and durability.Therefore, it is desirable to generate a heel strike and toe off motion in a walkingpattern for a biped robot. Many biped humanoid robots have already adopted it,but they usually have used a constant pelvis height.
In this study, the heel strike and toe off motion was adopted for the walk-ing pattern. A vertical movement of the pelvis center for more human-like motionwas also considered. In the human motion capture data, the ankle pitch anglewith respect to the Ground Fixed Coordinate (GFC) varied from approximately−30 degrees to 40 degrees (Fig. 21). For robots, the movable range of motionmay be smaller than that of humans, and the dimensions of the foot are differ-ent as well. In addition, it may be necessary to increase the contact time for bet-ter walking stability. Therefore, it is more feasible to generate a suitable anklepitch trajectory for robots while maintaining the vertical movement of the pelviscenter.
The proposed strategy involves pre-assigning the maximum and minimum anklepitch orientations (+30/−30 degrees) with respect to the GFC, and then calculatingthe vertical heights, h1 and h2 of the ankle joint from the ground at the moments ofthe heel strike and toe off, respectively (Fig. 22). The ankle vertical position with
0.5 1 1.5 2 2.5 3-40
-20
0
20
40
60
Time [sec]
Ang
le [d
eg]
Ankle Pitch Orientation of Human Motion w.r.t Ground Fixed Coordinate
Heel strike
Toe off
Fig. 21. Ankle pitch orientation of human motion with respect to the GFC.

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
Walking Pattern Mapping from Imperfect Motion 149
Fig. 22. Pitch orientation and vertical height of the ankle joint with respect to the GFC.
respect to the GFC was derived by the following relationship.
ZGFCankle = ZGFC
pelvis + zPFCankle. (10)
Here, ZGFCpelvis and zPFC
ankle are the vertical pelvis center position with respect tothe GFC and the vertical ankle position with the Pelvis Fixed Coordinate (PFC),respectively. More specifically, the ZGFC
pelvis is a pelvis center height of the targetrobot that is proportionally adjusted by the αz, and zPFC
ankle is the vertical mappedankle position that is equal to the z′RF (k) for the right foot or z′LF (k) for the leftfoot in Eq. (9). With respect to the GFC, the range of the vertical ankle heightduring walking is lower than h1 and h2 indicates that the foot is in contact withthe ground. In the case of Albert HUBO, the vertical height of the right ankle andcontacting regions are shown in Fig. 23. In these regions, the required ankle pitchorientation is calculated according to the variable vertical ankle height, h from theground as follows:
During heel contact or sole contact: θanklepitch = − sin−1(h/lr), (h ≤ h1), (11)
During toe contact: θanklepitch = sin−1(h/lf ), (h ≤ h2). (12)
Here, lf and lr are the lengths of the fore foot and the rear foot. As a result,the ankle pitch orientations of both legs of Albert HUBO with respect to the GFC
0.5 1 1.5 2 2.5 3-0.05
0
0.05
0.1
0.15
Time [sec]
ZG
[m]
Right Ankle Height of Albert HUBO w.r.t Ground Fixed Coordinate
Toe off
Heel strike o : Contact state
Fig. 23. Right ankle height of Albert HUBO with respect to the GFC. Ground contact is repre-sented by black circles.

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
150 J.-Y. Kim & Y.-S. Kim
0.5 1 1.5 2 2.5-40
-20
0
20
40
60
Time [sec]
Ang
le [d
eg]
Right Ankle Pitch Orientation w.r.t Ground Fixed Coordinate
Left Ankle Pitch Orientation w.r.t Ground Fixed Coordinate
Heel strike
Toe off
Fig. 24. Ankle pitch orientation of Albert HUBO with respect to the GFC. The minimum andmaximum values (+30/ − 30 degrees) occur at the moment of heel strike and toe off.
are generated, as shown in Fig. 24. In addition to the ankle pitch orientation, theankle roll and yaw orientations with respect to the GFC, are maintained at zero allthe times for an upright posture and straight walking direction.
3.4. No-slip constraint
The last item addressed in this paper is the slip problem that occurs in the motioncapture data. As was mentioned earlier, for real biped humanoid robots, the slipproblem between the supporting foot and the ground is serious in terms of walk-ing stability and actuator performance. If a walking pattern causes slippage, theleg structures become slightly bent during the double support phase and becomeunfolded during the single support phase. Then, structural vibrations of the legstructures occur during the single support phase and they can cause inaccuratelanding positions and instability. In addition, electric motors can be easily over-heated and reduction gears can also be gradually damaged. Therefore, regardlessof the walking controllers, the walking pattern itself must not generate slippagefor real biped humanoid robots. When a walking pattern is generated from motioncapture data, slippage may come from various sources. Imperfect motion data dueto the marker position errors and camera calibration errors may generate slippage.Also, the proposed geometric mapping algorithm or Fourier fitting may produceslippage during the process. In addition, in reality, there might be slippage duringactor’s walking. Figure 19 in Sec. 3.2 shows that the supporting ankle position movesslightly on the ground. More specifically, Fig. 25 shows the projected X-positionsof the right heel and toe on the ground and the Y-position of the right ankle withrespect to the GFC. The areas denoted with a thick line indicate that the foot isin contact with the ground. It is easily observed that the trajectories are not flatin those areas. This indicates that slippage of the supporting foot occurs during itscontact with the ground. If the slip is not eliminated, physical biped robots may

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
Walking Pattern Mapping from Imperfect Motion 151
Fig. 25. Right heel and toe X-position trajectories(left figure) and right ankle Y-position trajec-tories (right figure).
also slip on the ground and have a low level of walking stability. Therefore, a no-slipconstraint was defined and both ankle positions were compensated during walking.The no-slip constraint is defined as follows:
— In the lateral direction: Both ankle positions always maintain the same lateralpositions with respect to the GFC.
— In the forward direction: During contact with the ground, the contact points ofthe foot (toe or heel) maintain the same forward position with respect to theGFC.
By imposing these constraints, the compensatory displacements in the lateraland forward directions are calculated, and they are then superimposed onto thewalking pattern of the robot, as shown in Fig. 26. In particular, to prevent disconti-nuity, the compensatory displacement in the forward direction smoothly convergesto zero by using the cosine function after every ground contact. Figure 27 showsthe right heel and toe X-positions, and the right ankle Y-position projected onthe ground with respect to the GFC after the no-slip constraint. It shows clearlythat no slippage occurs during the ground contact. In the left figure, when the heelstrikes the ground, the X-position of the heel is fixed on the ground, while theX-position of the toe is moving in the air due to ankle rotation. In contrast, when
Inverse Kinematics
Ankle Position Trajectory
w.r.t. PelvisCenter FixedCoordinate
∑
CompensatoryAnkle Position w.r.t Ground
Fixed Coordinate
( )kP
( )kP∆
( ) ( )kk PP ∆+ ( )kθ
Fig. 26. Slip compensation block diagram.

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
152 J.-Y. Kim & Y.-S. Kim
Fig. 27. Right heel and toe X-position trajectories (left figure) and right ankle Y-position trajec-tories (right figure) after the no-slip constraint.
the heel is off the ground, the X-position of the toe is fixed on the ground and theX-position of the heel is moving in the air. During the contact of both the heel andtoe on the ground, the X-positions of both are also fixed. Therefore, the groundcontact smoothly moves from the heel to toe without any slip, similar to the waythat the human foot rolls on the ground. In the right figure, the Y-position of theright ankle maintains a constant position at all times. In order to reduce the lateralvibrations of the swing foot, the Y-positions of the ankle positions are always fixed.Furthermore, the slip compensated ankle position trajectories on the Sagittal andthe Coronal planes with respect to the PFC are represented in Fig. 28. In the figure,the maximum compensatory displacements in x and y directions are 8.5% and 7.6%of the original ranges. Finally, all the joint angles are derived through inverse kine-matics. The result shown in Fig. 29 is a slip-compensated ZMP trajectory of AlbertHUBO with both projected ankle positions on the ground. In this figure, there isno relative motion between the ground and the ankle positions, and the ZMP tra-jectory is within the stable boundaries all the times; hence the walking motion isassumed to be stable in terms of the stability criterion in our proposition. Though
-0.2 -0.1 0 0.1 0.2-0.6
-0.58
-0.56
-0.54
-0.52
-0.5
-0.48
-0.46
-0.44
x [m]
z[m
]
Right Ankle PositionModified Right Ankle Position
-0.2 -0.1 0 0.1 0.2-0.6
-0.58
-0.56
-0.54
-0.52
-0.5
-0.48
-0.46
-0.44
y [m]
z [m
]
Right Ankle PositionModified Right Ankle PositionLeft Ankle PositionModified Left Ankle Position
Left AnkleRight Ankle
(a) Sagittal Plane View (b) Control Plane View
Fig. 28. Slip compensated ankle position trajectories of Albert HUBO after the no-slip constraint.

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
Walking Pattern Mapping from Imperfect Motion 153
0.5 1 1.5 2 2.5-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Time[sec]
Dis
plac
emen
t [m
]
XzmpYzmpStable Boundaries
0 0.5 1 1.5 2 2.5 3 3.5
-0.2
-0.1
0
0.1
0.2
0.3
X [m]
Y [m
]
Right Ankle Position on FloorRight Ankle Position on FloorZMPStable Boundaries
Fig. 29. Slip-compensated ZMP trajectories of Albert HUBO.
the ZMP trajectories before and after the slip compensation are nearly identical, itis believed that the actual walking of the robot will be different. In this manner,it is possible to prevent the supporting foot from slipping on the ground due to itsimperfect walking pattern.
4. Conclusion
This paper proposed research on the walking pattern generation based on the motioncapture and its efficient mapping onto biped humanoid robots. Three areas of dif-ficulty were initially defined, and a suitable solution was then proposed for eachof these issues. The fundamentals of the proposed algorithm were based on theFourier fitting which allowed us to solve the problems of the measurement error ofthe motion capture data. They were also based on the geometric mapping usinginverse kinematics, which allowed for efficient and straightforward modification ofthe motion data according to the dimensions of the target robot without compro-mising its humanlike qualities. In addition, a no-slip constraint was then applied tothe algorithm so that a biped robot can walk more stably. In order to tune the var-ious coefficients of the Fourier fitting and geometric mapping, a simplified humanmodel was built, walking motion was simulated, and the ZMP was calculated. Dur-ing this process, human body data was used to analyze the walking motion ofhumans. After conducting the mapping of a standard human walking pattern ontotwo target robots, successful walking was verified through computer simulationswith the ZMP. Consequently, it was possible to utilize human motion capture datato generate stable and humanlike walking patterns for a range of biped robots. Aflow of data from human motions to a resulting walking pattern for a target robotis represented as follows:
(i) Motion capture data: 3 pelvis center trajectories in the Cartesian spaceand 12 joint angle trajectories in the joint angle space.

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
154 J.-Y. Kim & Y.-S. Kim
(ii) Fourier fitting 1: 3 Fourier series and 1 polynomial of the pelvis centertrajectories in the Cartesian space and 12 Fourier series of the joint angletrajectories in the joint angle space.
(iii) Fourier fitting 2: 6 Fourier series of the right and left ankle position trajec-tories in the Cartesian space.
(iv) Geometric mapping: 6 Fourier series of the right and left mapped ankleposition trajectories in the Cartesian space.
(v) Generation of the translational trajectories of the pelvis center:3 Fourier series and 1 polynomial of the modified pelvis center trajectories inthe Cartesian space.
(vi) Generation of the ankle orientation: 6 ankle orientation trajectories ofthe right and left ankle joints in the PFC.
(vii) Non-slip constraint: 6 Fourier series of the right and left mapped ankleposition trajectories in the Cartesian space with the 2 compensatory ankleposition trajectories in x and y directions.
(viii) Solving of inverse kinematics with respect to the PFC: 12 joint angletrajectories of both legs in the joint angle space. These trajectories are theresulting walking pattern for a target robot.
In this paper, the toe joint trajectories from the motion capture data wereignored because the target robots did not have toe joints. In fact, the toe jointsare very important for human walking. They lengthen the duration of the supportand can enlarge the supporting area to increase walking stability. The main reasonswhy we did not consider the toe joints for biped humanoid robots were the spacein the foot was not sufficient and the electric motor with a reduction gear makesthe foot heavier. If the light and compact toe joints are applied to the next versionsof our biped humanoid robot series, we will consider the toe joint trajectories withthe same procedure in order to generate a more human-like walking gait.
In future research, it is necessary to perform several tasks. The first of thesetasks involves building a motion capture system that is capable of direct ZMPmeasurement to verify the Fourier fitting method. The second task is the need tobuild an optimization process that can automatically correct the initial motion cap-ture data according to the smooth reference ZMP trajectory. Currently, the offsets,cut-off frequencies, and amplitudes of the Fourier fitting are manually adjusted byobserving the ZMP trajectory. However, this is a time-consuming job. Hence, afast and automatic process will reduce the time and determine the optimal val-ues more effectively. Third, it is necessary to develop a system that can evaluatethe mapping algorithm experimentally with real robots. Before we can apply ouralgorithm onto real robots, it is also necessary to design special two walking pat-terns for starting and stopping by modifying the standard human walking pattern.Transient walking motions can also be a good topic. Finally, we need to develop asuitable algorithm that modifies the walking pattern by considering the maximumspeed and torque limit of actuators. In this paper, we assumed that the simulation

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
Walking Pattern Mapping from Imperfect Motion 155
robot could perform perfect joint position control for the given trajectories whileprocessing the ZMP calculation. However, it is necessary to figure out the suitablemargin of the tracking error, and propose a criterion for modifying the walkingpattern.
Acknowledgments
The authors thank Prof. Jessica K. Hodgins of Carnegie Mellon University, whosupported the motion capture data through the use of the VICON system usedwith this research.
References
1. M. Unuma, K. Anjyo and R. Takeuchi, Fourier principles for emotion-based humanfigure animation, Int. Conf. on Computer Graphics and Interactive Techniques (1995),91–96.
2. A. Bruderlin, and L. Wiliams, Motion signal processing, Int. Conf. on ComputerGraphics and Interactive Techniques (1995), 97–104.
3. J. Gomes, L. Velho, F. W. Da Silva, and S. K. Goldenstein, Motion processing usingvariable harmonic components, Int. Conf. on Computer Animation (2000) 62–70.
4. K. Yamane, and Y. Nakamura, Dynamics Filter — concept and implementationof online motion generator for human figures, IEEE Transactions on Robotics andAutomation 19(3) (2003) 421–432.
5. M. Vukobratovic and B. Boravac, Zero-moment point-thirty five years of its life, Inter-national Journal of Humanoid Robotics 1(1) (2004) 157–173.
6. S. Tak, O. Song and H. S. Ko, Motion balance filtering, Computer Graphics Forum19(3) (2000) c437–c446.
7. K. W. Sok, M. Kim and J. Lee, Simulating biped behaviors from human motion data,ACM Transactions on Graphics (SIGGRAPH 2007) 26(3) (2007) 107.
8. K. Yamane, J. K. Hodgins and H. B. Brown, Controlling a motorized marionette withhuman motion capture data, International Journal of Humanoid Robotics 1(4) (2004)651–669.
9. H. Miyamoto, S. Schaal, F. Gandolfo, H. Gomi, Y. Koike, R. Osu, E. Nakano, Y.Wada and M. Kawato, A kendama learning robot based on bi-directional theory,Neural Networks 9(8) (1996) 1281–1302.
10. N. S. Pollard, J. K. Hodgins, M. J. Riley and Christopher G. Atkeson, Adapting humanmotion for the control of a humanoid robot, IEEE Int. Conf. Robotics & Automation(ICRA) (IEEE Press, Washington, DC, USA, 2002), 1390–1397.
11. Q. Huang, J. Yang, Z. Yu, W. Xu, J. Li and K. Li, Measurement of human walk-ing and generation of humanoid walking pattern, IEEE Int. Conf. on Robotics andBiomimetics (Sanya, China, 2007), 127–132.
12. S. S. Ha, J. H. Yu, Y. J. Han and H. S. Hahn, Natural gait generation of biped robotbased on analysis of human’s gait, Int. Conf. on Smart Manufacturing Application(ICSMA 2008) (Korea, 2008), 30–34.
13. A. Dasgupta and Y. Nakamura, Making feasible walking motion of humanoid robotsfrom human motion capture data, IEEE Int. Conf. Robotics & Automation (ICRA)(IEEE Press, Detroit, Michigan, USA, 1999), 1044–1049.
14. S. Nakaoka, A. Nakazawa, K. Yokoi, H. Hirukawa and K. Ikechi, Generating whilebody motions for a biped humanoid robot from captured human dances, IEEE Int.Conf. Robotics & Automation (ICRA) (Taipei, Taiwan, 2003), 3905–3910.

March 17, 2010 16:37 WSPC/S0219-8436 191-IJHR 00199
156 J.-Y. Kim & Y.-S. Kim
15. H. Imai, M. Nozawa, Y. Kawamura and Y. Sankai, Human motion oriented controlmethod for humanoid robot, IEEE Int. Workshop on Robot and Human InteractiveCommunication (Berlin, Germany, 2002), 211–216.
16. F. E. Pollick, J. G. Hale and M. T. Hadjigeorgieva, Perception of humanoid movement,International Journal of Humanoid Robotics 2(3) (2005) 277–300.
17. K. Nishiwaki, K. Nagasaka, M. Inaba and H. Inoue, Generation of reactive steppingmotion for a humanoid by dynamically stable mixture of pre-designed motion, in IEEEInt. Conf. Systems, Man, and Cybernetics (1999), 902–907.
18. Anthropometry and mass distribution for human analogues Vol I: Military male avi-ators, Naval Biodynamics Laboratory (New Orleans, LA, USA, 1988).
19. J. Perry, Gait Analysis: Normal and Pathological Function (SLACK, New Jersey, USA,1992).
Jung-Yup Kim received his BS and MS degrees in MechanicalEngineering from INHA University, Incheon, South Korea, andPhD degree in Mechanical Engineering from Korea AdvancedInstitute of Science and Technology (KAIST), Daejeon, SouthKorea, in 1999, 2001 and 2006, respectively. He was a Post Doc-tor of Humanoid Robot Research Center at KAIST and RoboticsInstitute of Carnegie Mellon University, Pittsburgh, USA in 2006and 2007 respectively. Since 2008, he has been an Assistant
Professor in School of Mechanical Design and Automation Engineering of SeoulNational University of Technology, Seoul, South Korea.
His research interests include mechanical design and control of biped humanoidrobots, visual processing using CCD camera, development of sensory devices usingmicro processor and tele-operating system. He is a member of the KSME andICASE.
Young-Seog Kim received his BS degree in Mechanical Engi-neering from Seoul National University, Seoul, Korea, in 1980and his MS and PhD degrees in Mechanical Engineering fromKorea Advanced Institute of Science and Technology (KAIST),Daejeon Korea, in 1983 and 1988, respectively. From 1984, hejoined the Department of Mechanical Design, Seoul NationalUniversity of Technology, Seoul, Korea, where he is currentlya Professor.
His research interests include car electronics, especially anti-lock brake system,controllers for industry purpose, humanoid robot design and walking control, DSPapplications. He is a member Korean Society of Automotive Engineers.
![[XLS]mbio.asm.orgmbio.asm.org/content/suppl/2010/09/10/mBio.00199-10.DC... · Web viewprotocatechuate 3,4-dioxygenase, beta subunit Carbon compound catabolism PA0154|pcaG PA14_01910|pcaG](https://img.pdfslide.us/doc/110x75/5ae5c8e37f8b9a6d4f8bbf68/xlsmbioasm-viewprotocatechuate-34-dioxygenase-beta-subunit-carbon-compound.jpg)




























