Embed Size (px)
Citation preview

MAGE Mid-term review (23/09/04):
Scientific work in progress
« Integrating the motion of satellites in a consistent relativistic
framework »
S. Pireaux
* Financial support provided through theEuropean Community's Improving Human Potential Program
under contract RTN2-2002-00217, MAGE

Observatoire Midi-Pyrénées
Royal Observatory of Belgium
• S. Pireaux, JP. Barriot,
• P. Rosenblatt
Collaborators:
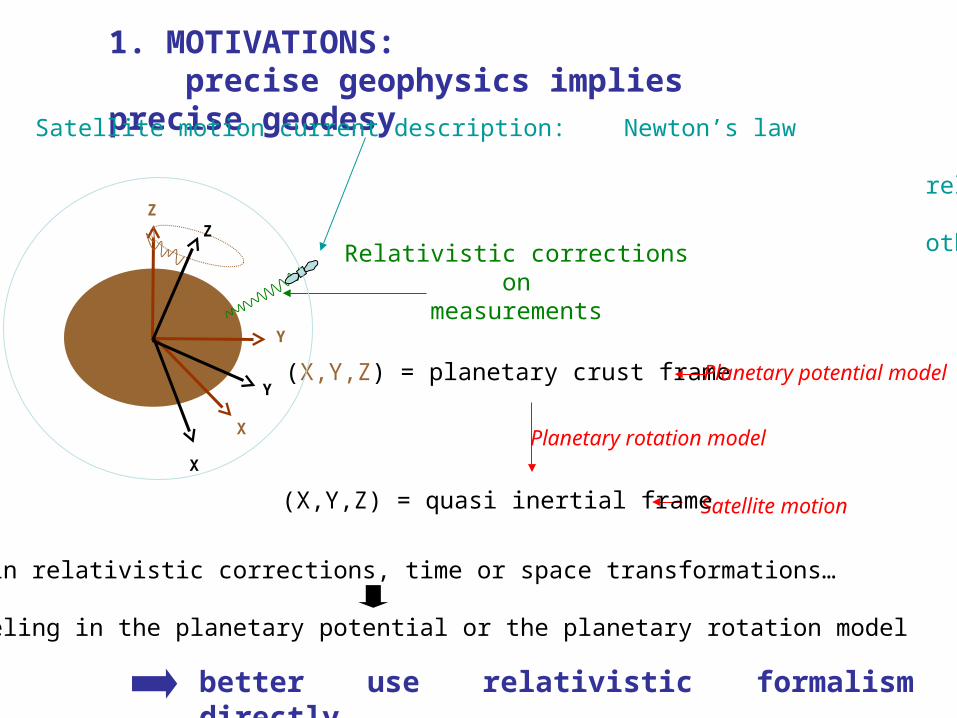
1. MOTIVATIONS: precise geophysics implies precise geodesy
Y
Z
X Planetary rotation model
(X,Y,Z) = planetary crust frame Planetary potential model
better use relativistic formalism directly
Errors in relativistic corrections, time or space transformations…
Mis-modeling in the planetary potential or the planetary rotation model
Satellite motion current description: Newton’s law + relativistic corrections + other forces
X
Y
Z
Satellite motion(X,Y,Z) = quasi inertial frame
Relativistic correctionson
measurements
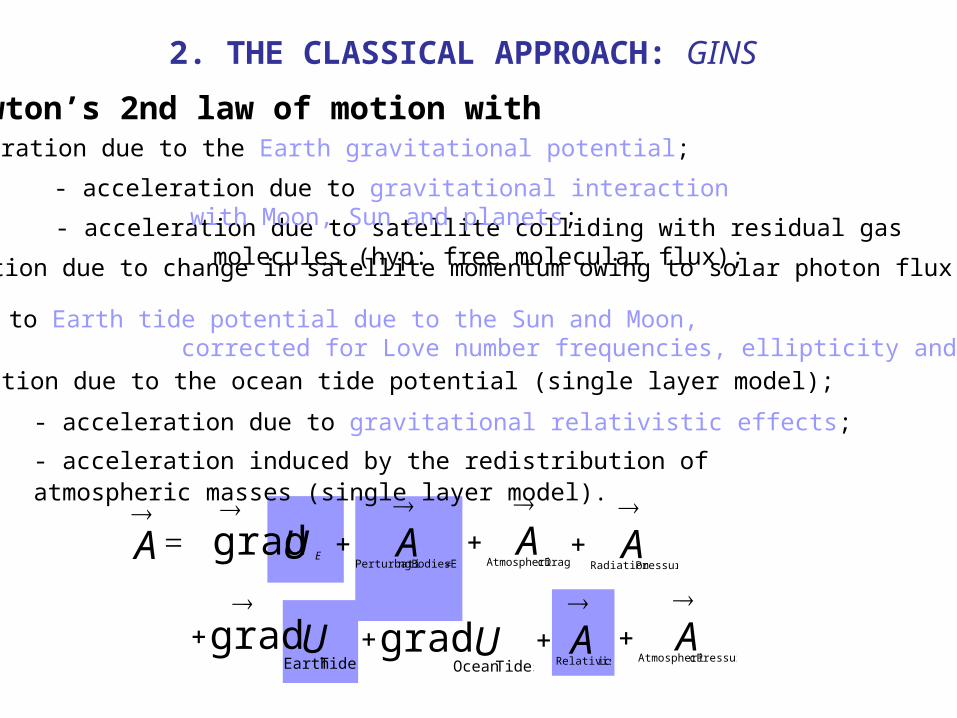
2. THE CLASSICAL APPROACH: GINS
Newton’s 2nd law of motion with
UA Egrad
- acceleration due to the Earth gravitational potential;
- acceleration due to Earth tide potential due to the Sun and Moon, corrected for Love number frequencies, ellipticity and polar tide;
UTidesEarth
grad
- acceleration due to the ocean tide potential (single layer model);
UTidesOcean
grad
- acceleration due to change in satellite momentum owing to solar photon flux;
APressureRadiation
- acceleration due to satellite colliding with residual gas molecules (hyp: free molecular flux);
ADrag cAtmospheri
- acceleration due to gravitational interaction with Moon, Sun and planets;
A
E Bodies ngPerturbati
- acceleration due to gravitational relativistic effects;
A icRelativist
- acceleration induced by the redistribution of atmospheric masses (single layer model).
APressure cAtmospheri
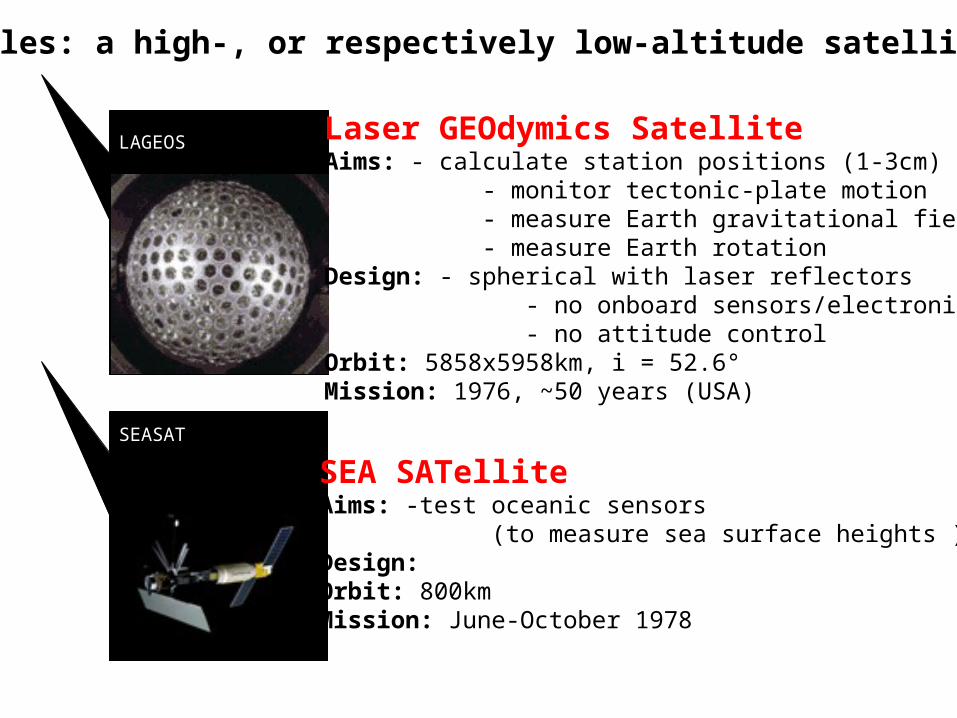
LAGEOS
SEASAT
Laser GEOdymics SatelliteAims: - calculate station positions (1-3cm) - monitor tectonic-plate motion - measure Earth gravitational field - measure Earth rotationDesign: - spherical with laser reflectors - no onboard sensors/electronic - no attitude controlOrbit: 5858x5958km, i = 52.6°Mission: 1976, ~50 years (USA)
SEA SATelliteAims: -test oceanic sensors (to measure sea surface heights )Design:Orbit: 800km Mission: June-October 1978
Examples: a high-, or respectively low-altitude satellite…

Cause LAGEOS 1 SEASAT
Earth monopole 2.8 7.9
Earth oblateness 1.0 10**-3 9.3 10 **-3
Low order geopotential harmonics (eg. l=2,m=2) 6.0 10**-6 5.4 10**-5
High order geopotential harmonics (eg.l=18,m=18) 6.9 10**-12 3.9 10**-7
Moon 2.1 10**-6 1.3 10**-6
Sun 9.6 10**-7 5.6 10**-7
Other planets (eg. Ve) 1.3 10**-10 7.3 10**-11
Indirect oblation (Moon-Earth) 1.4 10**-11 1.4 10**-11
General relativistic corrections 9.5 10**-10 4.9 10**-9
Atmospheric drag 3 10**-12 2 10**-7
Solar radiation pressure 3.2 10**-9 9.2 10**-8
Earth albedo pressure 3.4 10**-10 3.0 10**-8
Thermal emission 1.9 10**-12 1.9 10**-9
Orders of magnitude [m/s²]…
High satellite Low satellite
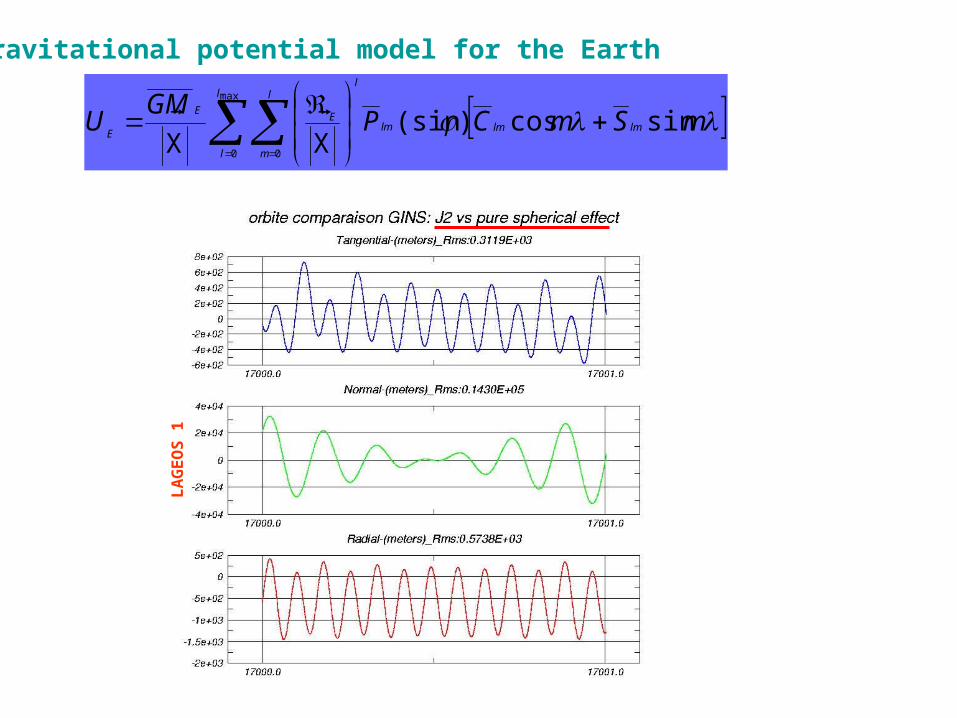
a) Gravitational potential model for the Earth
LA
GE
OS
1
mSmCPGM
U lmlm
l
l
l
m
lm
l
EE
Esincos)(sin
XX
max
0 0
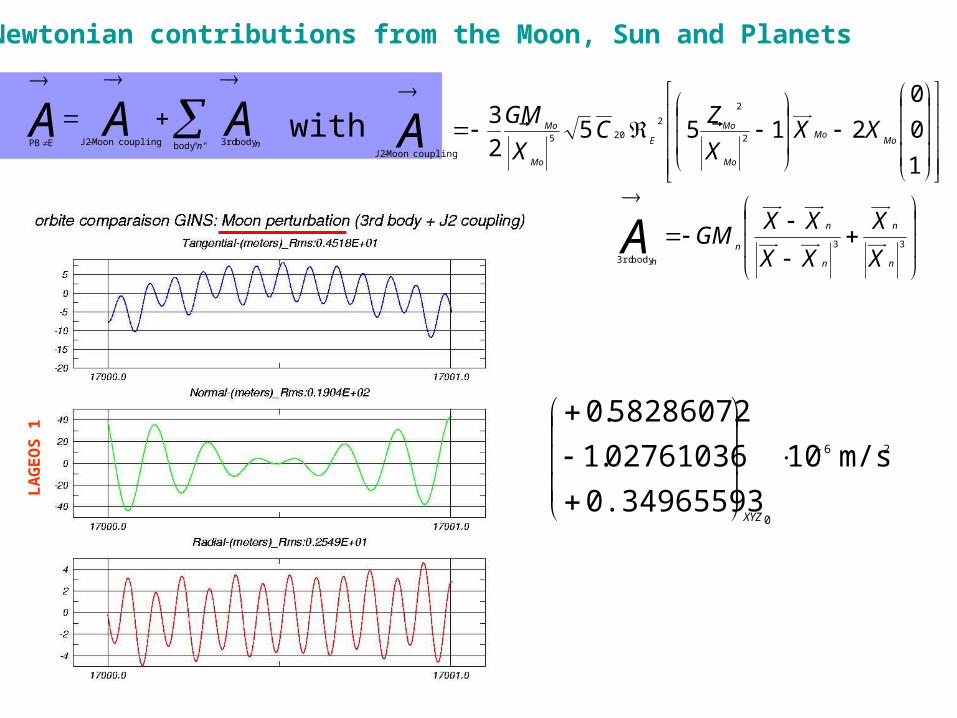
""body body 3rdcouplingMoon -J2E PB
n n
AAA with
and
b) Newtonian contributions from the Moon, Sun and Planets
26
0
m/s 10
0.34965593
02761036.1
58286072.0
XYZ
LA
GE
OS
1
33
body 3rd n
n
n
n
n
n X
X
XX
XXGMA
1
0
0
215 52
32
2
2
205
couplingMoon -J2
MoMo
Mo
Mo
E
Mo
Mo XXX
ZC
X
GMA
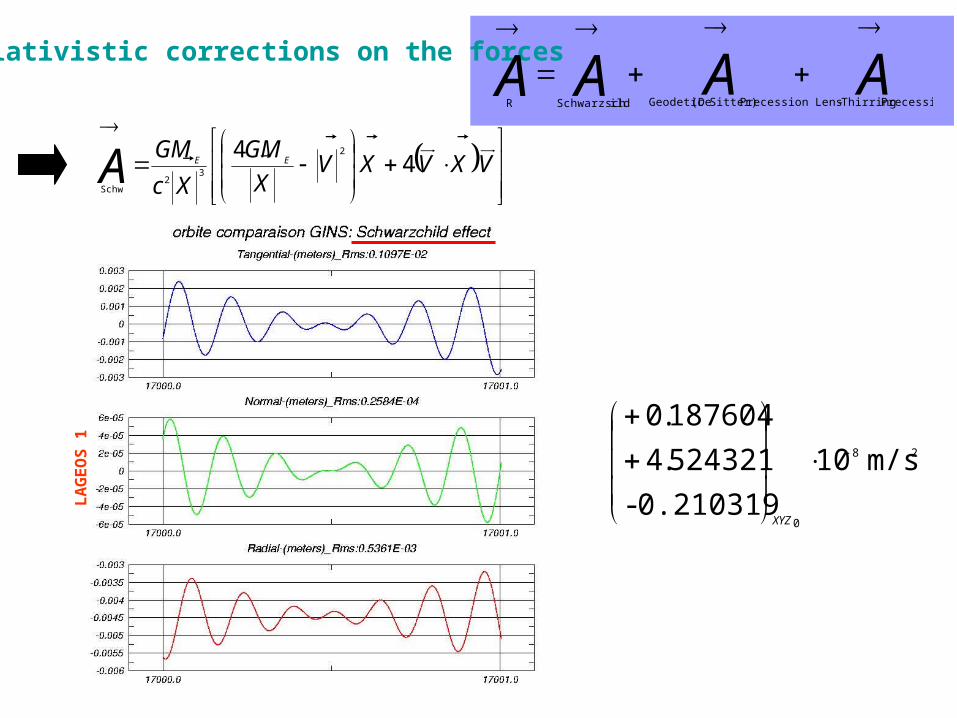
c) Relativistic corrections on the forcesAAAA
Precession Thirring-LensPrecession Sitter) (De GeodeticildSchwarzschR
LA
GE
OS
1
28
0
m/s 10
0.210319-
524321.4
187604.0
XYZ
VXVXVX
GM
Xc
GMEEA 4
4 2
32
Schw
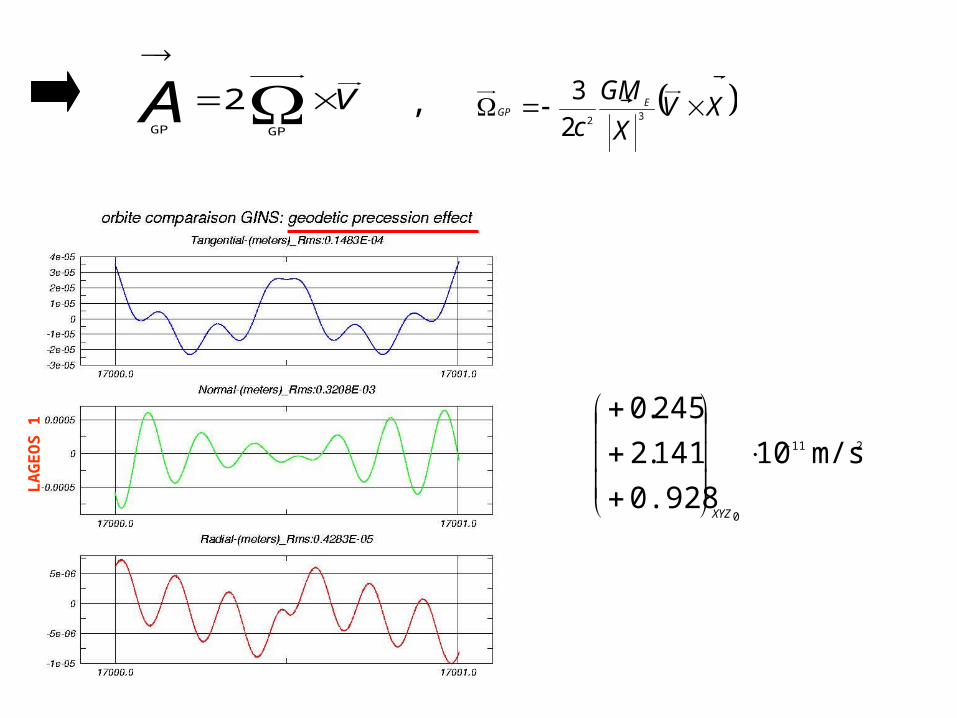
VA
GPGP
2 ,
211
0
m/s 10
0.928
141.2
245.0
XYZ
LA
GE
OS
1
XVX
GM
cE
GP
322
3

VA
LTPLTP
2 ,
212
0
m/s 10
40.10
83.34
13.0
XYZ
LA
GE
OS
1
23
2
3
X
XXSS
Xc
G E
ELTP
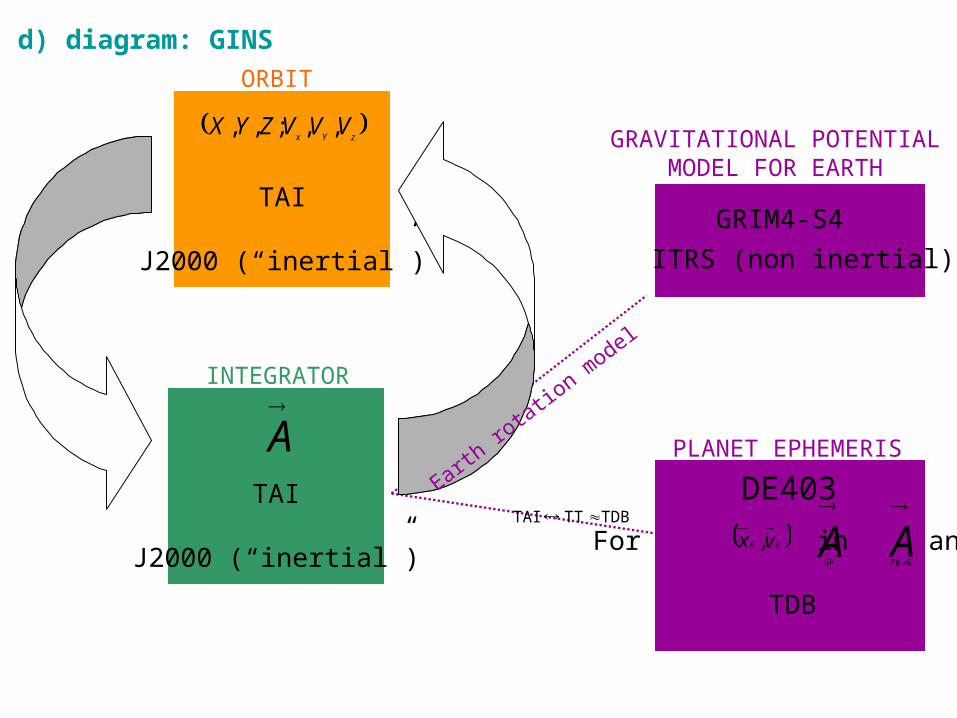
TAI
J2000 (“inertial”)
INTEGRATOR
A
TAI
J2000 (“inertial”)
zYx
VVVZYX ,,;,,
ORBIT
PLANET EPHEMERIS
DE403
For in and
TDB
AE PB
AGP
EE vx ,
GRAVITATIONAL POTENTIALMODEL FOR EARTH
GRIM4-S4
Earth ro
tation m
odel
ITRS (non inertial)
TDBTTTAI
d) diagram: GINS

3. THE IDEA…
Advantages: - To easily take into account all relativistic effects with “metric” adapted to the precision of measurements and adopted conventions. - Same geodesic equation for photons (light signals) massive particles (satellites without non-grav forces)
- Relativistically consistent approach
Advantages: - Well-proven method. - Might be sufficient for current application.
Classical approach: “Newton” + relativistic corrections for precise satellite dynamics and time measurements.
Alternative and pioneering effort: develop a satellite motion integrator in a pure relativistic framework.
Drawbacks: - To be adapted to the level of precision of data and to the adopted space-time transformations

Part. 3: RMI: Relativistic Motion Integrator (if only gravitational forces)
Part. 1: RELATIVISTIC TIME TRANSFORMATIONS
Part. 2: METRIC PRESCRIPTIONS
4. GENERAL STRUCTURE OF THIS RELATIVISTIC STUDY …
First developments for Earth satellites…
Then transpose this approach to others planets and missions: Mars, Mercury…
(SC)RMI: Semi-Classical RMI (if non-gravitational forces are present)
en cours

5. THE RELATIVISTIC APPROACH: (SC)RMI
2cVVG
and first integral
Need for symplectic integrator
classical limiti
i
X
W
dT
Xd
2
2 with W = GCRS generalized gravitational potential in metric
3 ,2 ,1 i
G
The geodesic equation of motion for the appropriate metric,
contains all needed gravitational relativistic effects.
with
d
dXV
VVd
dV
) , , ,T( ZYXcX
3 ,2 ,1 ,0
= Christoffel symbol associated to GCRS metric
= proper time
G

a) Method: GINS provides template orbits to validate the RMI orbits
- simulations with 1) Schwarzschild metric => validate Schwarzschild correction
2) (Schwarzschild + GRIM4-S4) metric => validate harmonic contributions
3) Kerr metric => validate Lens-Thirring correction
4) GCRS metric with(out) Sun, Moon, Planets => validate geodetic precession
(other bodies contributions)
(…)
b) RMI goes beyond GINS capabilities:
- (will) includes 1) IAU 2000 standard GCRS metric
2) IAU 2000 time transformation prescriptions
3) IAU 2000/IERS 2003 new standards on Earth rotation
4) (post)-post-Newtonian parameters ( ) in metric and space-time transfo
- separate modules allow easy update for metric, Earth potential model (EGM96)… prescriptions
- contains all relativistic effects, different couplings at corresponding metric order.
... , ,

GCRS (“inertial”)
INTEGRATOR
TCG
GCRS (“inertial”)
ORBIT
VX ;
V
d
dV;
PLANET EPHEMERIS
DE403
for in
TDB
G
GRAVITATIONAL POTENTIALMODEL FOR EARTH
GRIM4-S4
Ear
thro
tati
onm
odel
METRIC MODEL
GIAU2000
GCRS metric
ITRS (non inertial)
TDBTCG
TCG
TCG
c) diagram: RMI
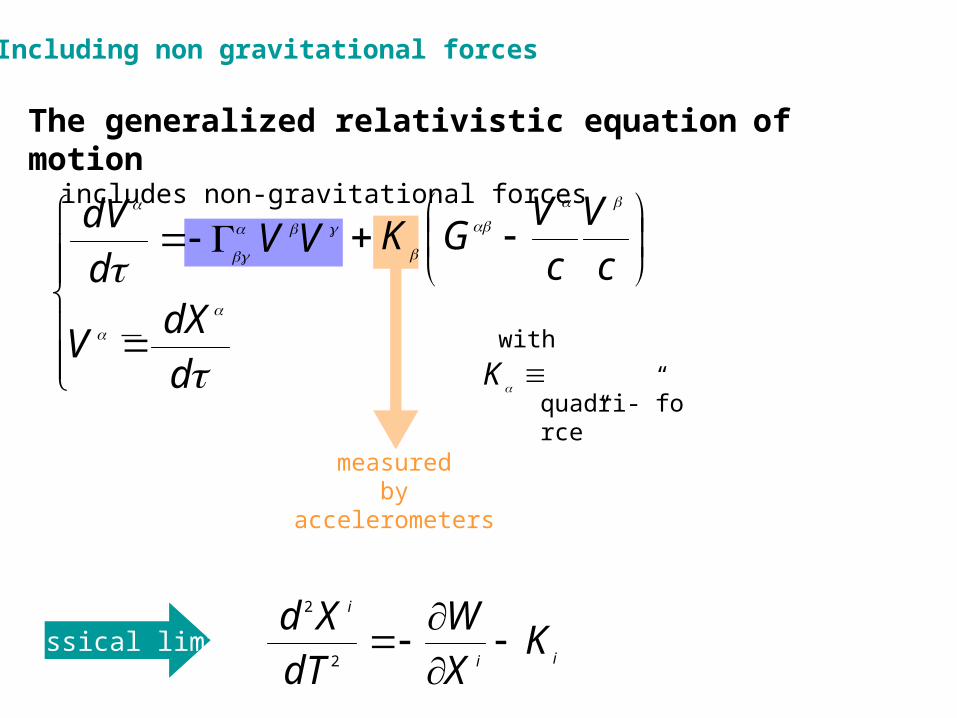
d) Including non gravitational forces
The generalized relativistic equation of motion includes non-gravitational forces
measuredby
accelerometers
classical limitii
i
KX
W
dT
Xd
2
2
with
d
dXV
VVd
dV
K quadri-”force”
c
V
c
VGK

classical limit j
j
ji
i
iX
XX
W
dT
XdK
2
2
2
The principle of accelerometers:
X
d
Xd
d
dX
d
dX
d
dXX
Xd
Xd
d
dX
d
dX
cGK
2
12
2
2
with evaluated at
for the CM of satellite
,G
K
X
difference between the two equations at first order in :
XX - test-mass, shielded from non-gravitational forces, at
X- satellite Center of Mass at

BIBLIOGRAPHY
[Bize et al 1999] Europhysics Letters C, 45, 558[Chovitz 1988] Bulletin Géodésique, 62,359[Fairhaid_Bretagnon 1990] Astronomy and Astrophysics, 229, 240-247[Hirayama et al 1988] ****[IAU 1992] IAU 1991 resolutions. IAU Information Bulletin 67[IAU 2001a] IAU 2000 resolutions. IAU Information Bulletin 88[IAU 2001b] Erratum on resolution B1.3. Information Bulletin 89 [IAU 2003] IAU Division 1, ICRS Working Group Task 5: SOFA libraries.
http://www.iau-sofa.rl.ac.uk/product.html[IERS 2003] IERS website. http://www.iers.org/map[Irwin-Fukushima 1999] Astronomy and Astrophysics, 348, 642-652[Lemonde et al 2001] Ed. A.N.Luiten, Berlin (Springer)[Moyer 1981a] Celestial Mechanics, 23, 33-56[Moyer 1981b] Celestial Mechanics, 23, 57-68[Moyer 2000] Monograph 2: Deep Space Communication and Navigation series[Soffel et al 2003] prepared for the Astronomical Journal, asro-ph/0303376v1
[Standish 1998] Astronomy and Astrophysics, 336, 381-384
[Weyers et al 2001] Metrologia A, 38, 4, 343
Relativistic time transformations
[Damour et al 1991] Physical Review D, 43, 10, 3273-3307 [Damour et al 1992] Physical Review D, 45, 4, 1017-1044[Damour et al 1993] Physical Review D, 47, 8, 3124-3135[Damour et al 1994] Physical Review D, 49, 2, 618-635 [IAU 1992] IAU 1991 resolutions. IAU Information Bulletin 67[IAU 2001a] IAU 2000 resolutions. IAU Information Bulletin 88[IAU 2001b] Erratum on resolution B1.3. Information Bulletin 89 [IAU 2003] IAU Division 1, ICRS Working Group Task 5: SOFA libraries.
http://www.iau-sofa.rl.ac.uk/product.html[IERS 2003] IERS website. http://www.iers.org/map[Klioner 1996] International Astronomical Union, 172, 39K, 309-320[Klioner et al 1993] Physical Review D, 48, 4, 1451-1461
[Klioner et al 2003] astro-ph/0303377 v1
[Soffel et al 2003] prepared for the Astronomical Journal, asro-ph/0303376v1
[GRGS 2001] Descriptif modèle de forces: logiciel GINS[Moisson 2000] (thèse). Observatoire de Paris[McCarthy Petit 2003] IERS conventions 2003 http://maia.usno.navy.mil/conv2000.html.
Metric prescriptions
RMI