Embed Size (px)
Citation preview

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Macroscopic Fundamental Diagrams ofarterial road networks governed by adaptive
traffic signal systems
Tim Garoni
School of Mathematical SciencesMonash University

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Fundamental DiagramI Consider a one-dimensional flow (vehicles along a freeway)I The functional relationship between flow and density is the
fundamental diagram (Greenshields, 1935)
0.0 0.2 0.4 0.6 0.8 1.00.00
0.05
0.10
0.15
0.20
0.25
density
flow
I Intuitively makes sense to have a unimodal FD in one dimensionI What should happen in a network?I How should one even define network flow?
(No prescribed direction)

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Fundamental DiagramI Consider a one-dimensional flow (vehicles along a freeway)I The functional relationship between flow and density is the
fundamental diagram (Greenshields, 1935)
0.0 0.2 0.4 0.6 0.8 1.00.00
0.05
0.10
0.15
0.20
0.25
density
flow
I Intuitively makes sense to have a unimodal FD in one dimensionI What should happen in a network?I How should one even define network flow?
(No prescribed direction)

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Fundamental DiagramI Consider a one-dimensional flow (vehicles along a freeway)I The functional relationship between flow and density is the
fundamental diagram (Greenshields, 1935)
0.0 0.2 0.4 0.6 0.8 1.00.00
0.05
0.10
0.15
0.20
0.25
density
flow
I Intuitively makes sense to have a unimodal FD in one dimension
I What should happen in a network?I How should one even define network flow?
(No prescribed direction)

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Fundamental DiagramI Consider a one-dimensional flow (vehicles along a freeway)I The functional relationship between flow and density is the
fundamental diagram (Greenshields, 1935)
0.0 0.2 0.4 0.6 0.8 1.00.00
0.05
0.10
0.15
0.20
0.25
density
flow
I Intuitively makes sense to have a unimodal FD in one dimensionI What should happen in a network?
I How should one even define network flow?(No prescribed direction)

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Fundamental DiagramI Consider a one-dimensional flow (vehicles along a freeway)I The functional relationship between flow and density is the
fundamental diagram (Greenshields, 1935)
0.0 0.2 0.4 0.6 0.8 1.00.00
0.05
0.10
0.15
0.20
0.25
density
flow
I Intuitively makes sense to have a unimodal FD in one dimensionI What should happen in a network?I How should one even define network flow?
(No prescribed direction)

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Macroscopic Fundamental DiagramsI Simplest idea: relate arithmetic means of link density and flowI If network has link set Λ:
ρ =1|Λ|
∑λ∈Λ
ρλ, J =1|Λ|
∑λ∈Λ
Jλ
I ρλ is density of link λ and Jλ is its flow
Geroliminis & Daganzo 2008Empirical data from Yokohama
Buisson & Ladier 2009Empirical data from Toulouse

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Two Extreme Cases
I Existence of MFDs is trivial:I If all links have the same FDI and if the distribution of congestion is always perfectly uniformI then network MFD coincides with common link FD
I This is not very interesting...I Existence of MFDs is impossible:
I If one has a network and is free to vary the demand on each link inany way imaginable, then no MFD can exist
I e.g. half the links have ρλ = 1 and other half have ρλ = 0, thenρ = 1/2 and J = 0
I e.g. all links have ρλ = 1/2, then ρ = 1/2 but J > 0(could even have J = Jmax)
I Existence of MFDs clearly not independent of demandI MFDs are interesting because there is something in betweenI In practice, on many networks the demand will rise and fall in a
fairly constrained way during a typical day

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Two Extreme Cases
I Existence of MFDs is trivial:I If all links have the same FDI and if the distribution of congestion is always perfectly uniformI then network MFD coincides with common link FDI This is not very interesting...
I Existence of MFDs is impossible:I If one has a network and is free to vary the demand on each link in
any way imaginable, then no MFD can existI e.g. half the links have ρλ = 1 and other half have ρλ = 0, thenρ = 1/2 and J = 0
I e.g. all links have ρλ = 1/2, then ρ = 1/2 but J > 0(could even have J = Jmax)
I Existence of MFDs clearly not independent of demandI MFDs are interesting because there is something in betweenI In practice, on many networks the demand will rise and fall in a
fairly constrained way during a typical day

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Two Extreme Cases
I Existence of MFDs is trivial:I If all links have the same FDI and if the distribution of congestion is always perfectly uniformI then network MFD coincides with common link FDI This is not very interesting...
I Existence of MFDs is impossible:I If one has a network and is free to vary the demand on each link in
any way imaginable, then no MFD can existI e.g. half the links have ρλ = 1 and other half have ρλ = 0, thenρ = 1/2 and J = 0
I e.g. all links have ρλ = 1/2, then ρ = 1/2 but J > 0(could even have J = Jmax)
I Existence of MFDs clearly not independent of demand
I MFDs are interesting because there is something in betweenI In practice, on many networks the demand will rise and fall in a
fairly constrained way during a typical day

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Two Extreme Cases
I Existence of MFDs is trivial:I If all links have the same FDI and if the distribution of congestion is always perfectly uniformI then network MFD coincides with common link FDI This is not very interesting...
I Existence of MFDs is impossible:I If one has a network and is free to vary the demand on each link in
any way imaginable, then no MFD can existI e.g. half the links have ρλ = 1 and other half have ρλ = 0, thenρ = 1/2 and J = 0
I e.g. all links have ρλ = 1/2, then ρ = 1/2 but J > 0(could even have J = Jmax)
I Existence of MFDs clearly not independent of demandI MFDs are interesting because there is something in betweenI In practice, on many networks the demand will rise and fall in a
fairly constrained way during a typical day

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
What are MFDs?Consider a fixed network with link set ΛFirst of all, one needs to agree on what ρ and J mean.
I ρλ(t) and Jλ(t) are stochastic processesI Aggregate variables
ρ(t) =1|Λ|
∑λ∈Λ
ρλ(t) J(t) =1|Λ|
∑λ∈Λ
Jλ(t)
I MFD is the relationship between EJ(t) and Eρ(t)I Can be interested in instantaneous or stationary MFDs
I “Heterogeneity” is also important
h(t) =
√1|Λ|
∑λ∈Λ
[ρλ(t)− ρ(t)]2
Helbing 2009; Mazloumian, Geroliminis & Helbing 2010;Geroliminis & Sun 2011; de Gier, G & Zhang 2013
I J, ρ, h all stochastic processesI In time dependent context, heterogeneity can explain hysteresis

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
What are MFDs?Consider a fixed network with link set ΛFirst of all, one needs to agree on what ρ and J mean.
I ρλ(t) and Jλ(t) are stochastic processesI Aggregate variables
ρ(t) =1|Λ|
∑λ∈Λ
ρλ(t) J(t) =1|Λ|
∑λ∈Λ
Jλ(t)
I MFD is the relationship between EJ(t) and Eρ(t)I Can be interested in instantaneous or stationary MFDsI “Heterogeneity” is also important
h(t) =
√1|Λ|
∑λ∈Λ
[ρλ(t)− ρ(t)]2
Helbing 2009; Mazloumian, Geroliminis & Helbing 2010;Geroliminis & Sun 2011; de Gier, G & Zhang 2013
I J, ρ, h all stochastic processesI In time dependent context, heterogeneity can explain hysteresis

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Asymmetric Simple Exclusion Process (ASEP)“Everything should be made as simple as possible, but not simpler”
(Albert Einstein)I Want an Ising model of traffic flowI One-dimensional stochastic cellular automata very popular in
statistical mechanics starting in 1990sI Such models do a reasonable job of explaining qualitative
behaviour of freeway trafficI “Phantom” jams emerge as consequence of collective behaviour
I Cellular automata are discrete dynamical systemsI Space, time, and state variables are discrete
I ASEP with open boundaries:
I If x1(t) = 0, then with probability α, x1(t + 1) = 1I For each cell i = 1, . . . , L with xi(t) = 1
I If xi+1(t) = 0 then with probability p, xi (t + 1) = 0 and xi+1(t + 1) = 1I Else xi (t + 1) = 1
I If xL(t) = 1, then with probability β, xL(t + 1) = 0

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Asymmetric Simple Exclusion Process (ASEP)“Everything should be made as simple as possible, but not simpler”
(Albert Einstein)I Want an Ising model of traffic flowI One-dimensional stochastic cellular automata very popular in
statistical mechanics starting in 1990sI Such models do a reasonable job of explaining qualitative
behaviour of freeway trafficI “Phantom” jams emerge as consequence of collective behaviour
I Cellular automata are discrete dynamical systemsI Space, time, and state variables are discrete
I ASEP with open boundaries:I If x1(t) = 0, then with probability α, x1(t + 1) = 1I For each cell i = 1, . . . , L with xi(t) = 1
I If xi+1(t) = 0 then with probability p, xi (t + 1) = 0 and xi+1(t + 1) = 1I Else xi (t + 1) = 1
I If xL(t) = 1, then with probability β, xL(t + 1) = 0

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Asymmetric Simple Exclusion Process (ASEP)“Everything should be made as simple as possible, but not simpler”
(Albert Einstein)I Want an Ising model of traffic flowI One-dimensional stochastic cellular automata very popular in
statistical mechanics starting in 1990sI Such models do a reasonable job of explaining qualitative
behaviour of freeway trafficI “Phantom” jams emerge as consequence of collective behaviour
I Cellular automata are discrete dynamical systemsI Space, time, and state variables are discrete
I ASEP with open boundaries:I If x1(t) = 0, then with probability α, x1(t + 1) = 1I For each cell i = 1, . . . , L with xi(t) = 1
I If xi+1(t) = 0 then with probability p, xi (t + 1) = 0 and xi+1(t + 1) = 1I Else xi (t + 1) = 1
I If xL(t) = 1, then with probability β, xL(t + 1) = 0

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Asymmetric Simple Exclusion Process (ASEP)“Everything should be made as simple as possible, but not simpler”
(Albert Einstein)I Want an Ising model of traffic flowI One-dimensional stochastic cellular automata very popular in
statistical mechanics starting in 1990sI Such models do a reasonable job of explaining qualitative
behaviour of freeway trafficI “Phantom” jams emerge as consequence of collective behaviour
I Cellular automata are discrete dynamical systemsI Space, time, and state variables are discrete
I ASEP with open boundaries:I If x1(t) = 0, then with probability α, x1(t + 1) = 1I For each cell i = 1, . . . , L with xi(t) = 1
I If xi+1(t) = 0 then with probability p, xi (t + 1) = 0 and xi+1(t + 1) = 1I Else xi (t + 1) = 1
I If xL(t) = 1, then with probability β, xL(t + 1) = 0

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Asymmetric Simple Exclusion Process (ASEP)“Everything should be made as simple as possible, but not simpler”
(Albert Einstein)I Want an Ising model of traffic flowI One-dimensional stochastic cellular automata very popular in
statistical mechanics starting in 1990sI Such models do a reasonable job of explaining qualitative
behaviour of freeway trafficI “Phantom” jams emerge as consequence of collective behaviour
I Cellular automata are discrete dynamical systemsI Space, time, and state variables are discrete
I ASEP with open boundaries:I If x1(t) = 0, then with probability α, x1(t + 1) = 1I For each cell i = 1, . . . , L with xi(t) = 1
I If xi+1(t) = 0 then with probability p, xi (t + 1) = 0 and xi+1(t + 1) = 1I Else xi (t + 1) = 1
I If xL(t) = 1, then with probability β, xL(t + 1) = 0

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Asymmetric Simple Exclusion Process (ASEP)“Everything should be made as simple as possible, but not simpler”
(Albert Einstein)I Want an Ising model of traffic flowI One-dimensional stochastic cellular automata very popular in
statistical mechanics starting in 1990sI Such models do a reasonable job of explaining qualitative
behaviour of freeway trafficI “Phantom” jams emerge as consequence of collective behaviour
I Cellular automata are discrete dynamical systemsI Space, time, and state variables are discrete
I ASEP with open boundaries:I If x1(t) = 0, then with probability α, x1(t + 1) = 1I For each cell i = 1, . . . , L with xi(t) = 1
I If xi+1(t) = 0 then with probability p, xi (t + 1) = 0 and xi+1(t + 1) = 1I Else xi (t + 1) = 1
I If xL(t) = 1, then with probability β, xL(t + 1) = 0

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Asymmetric Simple Exclusion Process (ASEP)“Everything should be made as simple as possible, but not simpler”
(Albert Einstein)I Want an Ising model of traffic flowI One-dimensional stochastic cellular automata very popular in
statistical mechanics starting in 1990sI Such models do a reasonable job of explaining qualitative
behaviour of freeway trafficI “Phantom” jams emerge as consequence of collective behaviour
I Cellular automata are discrete dynamical systemsI Space, time, and state variables are discrete
I ASEP with open boundaries:I If x1(t) = 0, then with probability α, x1(t + 1) = 1I For each cell i = 1, . . . , L with xi(t) = 1
I If xi+1(t) = 0 then with probability p, xi (t + 1) = 0 and xi+1(t + 1) = 1I Else xi (t + 1) = 1
I If xL(t) = 1, then with probability β, xL(t + 1) = 0

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Nagel-Schreckenberg process
I NaSch generalizes ASEP
I Vehicles can have different speeds 0, 1, . . . , vmax
I Let xn and vn denote the position & speed of the nth vehicleI Let dn denote the gap in front of the nth vehicleI The NaSch rules are as follows:
I vn 7→ min(vn + 1, vmax)I vn 7→ min(vn, dn)I vn 7→ max(vn − 1, 0) with probability pI xn 7→ xn + vn

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Nagel-Schreckenberg process
I NaSch generalizes ASEPI Vehicles can have different speeds 0, 1, . . . , vmax
3 1 2
I Let xn and vn denote the position & speed of the nth vehicleI Let dn denote the gap in front of the nth vehicleI The NaSch rules are as follows:
I vn 7→ min(vn + 1, vmax)I vn 7→ min(vn, dn)I vn 7→ max(vn − 1, 0) with probability pI xn 7→ xn + vn

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Nagel-Schreckenberg process
I NaSch generalizes ASEPI Vehicles can have different speeds 0, 1, . . . , vmax
3 1 2
I Let xn and vn denote the position & speed of the nth vehicle
I Let dn denote the gap in front of the nth vehicleI The NaSch rules are as follows:
I vn 7→ min(vn + 1, vmax)I vn 7→ min(vn, dn)I vn 7→ max(vn − 1, 0) with probability pI xn 7→ xn + vn

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Nagel-Schreckenberg process
I NaSch generalizes ASEPI Vehicles can have different speeds 0, 1, . . . , vmax
3 1 2
I Let xn and vn denote the position & speed of the nth vehicleI Let dn denote the gap in front of the nth vehicle
I The NaSch rules are as follows:
I vn 7→ min(vn + 1, vmax)I vn 7→ min(vn, dn)I vn 7→ max(vn − 1, 0) with probability pI xn 7→ xn + vn

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Nagel-Schreckenberg process
I NaSch generalizes ASEPI Vehicles can have different speeds 0, 1, . . . , vmax
3 1 2
I Let xn and vn denote the position & speed of the nth vehicleI Let dn denote the gap in front of the nth vehicleI The NaSch rules are as follows:
I vn 7→ min(vn + 1, vmax)I vn 7→ min(vn, dn)I vn 7→ max(vn − 1, 0) with probability pI xn 7→ xn + vn

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Nagel-Schreckenberg process
I NaSch generalizes ASEPI Vehicles can have different speeds 0, 1, . . . , vmax
3 1 2
I Let xn and vn denote the position & speed of the nth vehicleI Let dn denote the gap in front of the nth vehicleI The NaSch rules are as follows:
I vn 7→ min(vn + 1, vmax)
I vn 7→ min(vn, dn)I vn 7→ max(vn − 1, 0) with probability pI xn 7→ xn + vn

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Nagel-Schreckenberg process
I NaSch generalizes ASEPI Vehicles can have different speeds 0, 1, . . . , vmax
3 1 2
I Let xn and vn denote the position & speed of the nth vehicleI Let dn denote the gap in front of the nth vehicleI The NaSch rules are as follows:
I vn 7→ min(vn + 1, vmax)I vn 7→ min(vn, dn)
I vn 7→ max(vn − 1, 0) with probability pI xn 7→ xn + vn

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Nagel-Schreckenberg process
I NaSch generalizes ASEPI Vehicles can have different speeds 0, 1, . . . , vmax
3 1 2
I Let xn and vn denote the position & speed of the nth vehicleI Let dn denote the gap in front of the nth vehicleI The NaSch rules are as follows:
I vn 7→ min(vn + 1, vmax)I vn 7→ min(vn, dn)I vn 7→ max(vn − 1, 0) with probability p
I xn 7→ xn + vn

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Nagel-Schreckenberg process
I NaSch generalizes ASEPI Vehicles can have different speeds 0, 1, . . . , vmax
3 1 2
I Let xn and vn denote the position & speed of the nth vehicleI Let dn denote the gap in front of the nth vehicleI The NaSch rules are as follows:
I vn 7→ min(vn + 1, vmax)I vn 7→ min(vn, dn)I vn 7→ max(vn − 1, 0) with probability pI xn 7→ xn + vn

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Nagel-Schreckenberg process
I NaSch generalizes ASEPI Vehicles can have different speeds 0, 1, . . . , vmax
1 2 3
I Let xn and vn denote the position & speed of the nth vehicleI Let dn denote the gap in front of the nth vehicleI The NaSch rules are as follows:
I vn 7→ min(vn + 1, vmax)I vn 7→ min(vn, dn)I vn 7→ max(vn − 1, 0) with probability pI xn 7→ xn + vn

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Nagel-Schreckenberg process
I NaSch generalizes ASEPI Vehicles can have different speeds 0, 1, . . . , vmax
1 2 3
I Let xn and vn denote the position & speed of the nth vehicleI Let dn denote the gap in front of the nth vehicleI The NaSch rules are as follows:
I vn 7→ min(vn + 1, vmax)I vn 7→ min(vn, dn)I vn 7→ max(vn − 1, 0) with probability pI xn 7→ xn + vn

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Nagel-Schreckenberg process
I NaSch generalizes ASEPI Vehicles can have different speeds 0, 1, . . . , vmax
2 3 3
I Let xn and vn denote the position & speed of the nth vehicleI Let dn denote the gap in front of the nth vehicleI The NaSch rules are as follows:
I vn 7→ min(vn + 1, vmax)I vn 7→ min(vn, dn)I vn 7→ max(vn − 1, 0) with probability pI xn 7→ xn + vn

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Nagel-Schreckenberg process
I NaSch generalizes ASEPI Vehicles can have different speeds 0, 1, . . . , vmax
2 3 3
I Let xn and vn denote the position & speed of the nth vehicleI Let dn denote the gap in front of the nth vehicleI The NaSch rules are as follows:
I vn 7→ min(vn + 1, vmax)I vn 7→ min(vn, dn)I vn 7→ max(vn − 1, 0) with probability pI xn 7→ xn + vn

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
NetNaSch modelGoal: Minimal stat-mech model that can mimic realistic traffic signals
I Take multiple NaSch models and glue them together
α1,β1
α2,β2
α3,β3 α4,β4
α5,β5
α6,β6
α7,β7α8,β8
γ1 δ1
γ2δ2
γ3δ3
γ4δ4
p1
p2 p3
p4
I Need to include:I Multiple lanes with lane changingI Turning decisions (random)I Input and output
(endogenous/exogenous)I Appropriate rules for how vehicles
traverse intersections
Varying all the αλ, βλ, γλ, δλ,pn... cannot give an MFDVarying a lower-dimensional space of parameters can

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
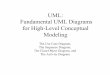
Static demand – Approach to StationarityGenerate MFD by setting αλ = α, βλ = β, γλ = δλ = 0 for all λ ∈ Λ
0 0.2 0.4 0.6 0.8 10
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
network density
netw
ork
flow
SCATS−L: isotropic and time independent rates (γ=0, δ=0), pT = 0.1
1st hr2nd hr3rd hr4th hr5th hr6th hr
0 0.2 0.4 0.6 0.8 10
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
network densityne
twor
k de
nsity
het
erog
enei
ty
SCATS−L: isotropic and time independent rates (γ=0, δ=0), pT = 0.1
1st hr2nd hr3rd hr4th hr5th hr6th hr
I Intersections governed by model of SCATS with adaptive linkingI Instantaneous MFD converges to stationary curveI Although there is uniform boundary demand, the density
distribution in the network is not homogeneous

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Static demand – Stationary MFDs
I Use MFDs to quantify performance of signal systems
0 0.2 0.4 0.6 0.8 10
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
network density
netw
ork
flow
Isotropic and time independent rates (γ=0, δ=0) , pT = 0.1 at 6 hr
SOTLSCATS−LSCATS−F
Isotropic boundary demand
0 0.2 0.4 0.6 0.8 10
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
network density
netw
ork
flow
Anisotropic and time independent rates (γ=0, δ=0) , pT = 0.1 at 6 hr
SOTLSCATS−LSCATS−F
Higher demand on west sideI Anisotropic demand can still produce well-defined MFD

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Static demand – Stationary MFDs
I Use MFDs to quantify performance of signal systems
0 0.2 0.4 0.6 0.8 10
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
network density
netw
ork
flow
Isotropic and time independent rates (γ=0, δ=0) , pT = 0.1 at 6 hr
SOTLSCATS−LSCATS−F
Isotropic boundary demand
0 0.2 0.4 0.6 0.8 10
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
network density
netw
ork
flow
Anisotropic and time independent rates (γ=0, δ=0) , pT = 0.1 at 6 hr
SOTLSCATS−LSCATS−F
Higher demand on west side
I Anisotropic demand can still produce well-defined MFD

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Static demand – Stationary MFDs
I Use MFDs to quantify performance of signal systems
0 0.2 0.4 0.6 0.8 10
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
network density
netw
ork
flow
Isotropic and time independent rates (γ=0, δ=0) , pT = 0.1 at 6 hr
SOTLSCATS−LSCATS−F
Isotropic boundary demand
0 0.2 0.4 0.6 0.8 10
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
network density
netw
ork
flow
Anisotropic and time independent rates (γ=0, δ=0) , pT = 0.1 at 6 hr
SOTLSCATS−LSCATS−F
Higher demand on west sideI Anisotropic demand can still produce well-defined MFD

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Self-organizing traffic lights
I SOTL is a toy model of a highly adaptive acyclic signal systemI Always gives green to phase with the highest demand
0 0.2 0.4 0.6 0.8 10
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
network density
netw
ork
dens
ity h
eter
ogen
eity
SCATS−L: isotropic and time independent rates (γ=0, δ=0), pT = 0.1
1st hr2nd hr3rd hr4th hr5th hr6th hr
0 0.2 0.4 0.6 0.8 10
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
network density
netw
ork
dens
ity h
eter
ogen
eity
SOTL: isotropic and time independent rates (γ=0, δ=0), pT = 0.1
1st hr2nd hr3rd hr4th hr5th hr6th hr
I SOTL has lower heterogeneity than SCATSI Accounts for its better MFD

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Time-dependent demandI Vary α, β over 24 hours to mimic am/pm peaksI Hysteresis observed - clockwise and anticlockwise
Buisson & Ladier 2009Empirical data from Toulouse
0 0.2 0.4 0.6 0.8 10
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
network density
netw
ork
flow
SOTL: time dependent rates, pT = 0.1(γ = 0, δ = 0)
0 ~ 4hr4 ~ 8hr8 ~ 12hr12 ~ 16hr16 ~ 20hr
Zhang, G & de Gier 2013Simulated data

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Time-dependent demand
I Hysteresis in MFD consequence of heterogeneity
0 0.2 0.4 0.6 0.8 10
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
network density
netw
ork
flow
SOTL: time dependent rates, pT = 0.1(γ = 0, δ = 0)
0 ~ 4hr4 ~ 8hr8 ~ 12hr12 ~ 16hr16 ~ 20hr
Zhang, G & de Gier 2013Simulated data
0 0.2 0.4 0.6 0.8 10
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
network density
den
sity
het
erog
enei
ty
SOTL: time dependent rates (γ=0, δ=0), pT = 0.1
0 ~ 4hr4 ~ 8hr8 ~ 12hr12 ~ 16hr16 ~ 20hr
Zhang, G & de Gier 2013Simulated data

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Two-bin modelI Consider two adjacent networks (bins) exchanging vehiclesI Each bin has same well-defined MFD J(ρ)
dρ1
dt=
a1 − b1J(ρ1) + p2J(ρ2)− p1J(ρ1)
L1
dρ2
dt=
a2 − b2J(ρ2) + p1J(ρ1)− p2J(ρ2)
L2
I Let bin 1 be boundary layer, bin 2 the interior
Loading Recovery

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Two-bin modelI Consider two adjacent networks (bins) exchanging vehiclesI Each bin has same well-defined MFD J(ρ)
dρ1
dt=
a1 − b1J(ρ1) + p2J(ρ2)− p1J(ρ1)
L1
dρ2
dt=
a2 − b2J(ρ2) + p1J(ρ1)− p2J(ρ2)
L2
I Let bin 1 be boundary layer, bin 2 the interior
Loading Recovery

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Two-bin modelI Consider two adjacent networks (bins) exchanging vehiclesI Each bin has same well-defined MFD J(ρ)
dρ1
dt=
a1 − b1J(ρ1) + p2J(ρ2)− p1J(ρ1)
L1
dρ2
dt=
a2 − b2J(ρ2) + p1J(ρ1)− p2J(ρ2)
L2
I Let bin 1 be boundary layer, bin 2 the interior
00
ρ1
ρ 2
a1 = 0.1, b
1 = 0, p
1 = 0.08, p
2 = 0.02
ρj
ρj
ρc
ρc
Loading
00
ρ1
ρ 2
a1 = 0, b
1 = 0.1, p
1 = 0.08, p
2 = 0.02
ρj
ρj
ρc
ρc
Recovery
00
a1 = 0.1, b
1 = 0.1, p
1 = 0.08, p
2 = 0.02
Jc
ρj
ρc
Instantaneous MFD

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Open Problems
I Can we observe anticlockwise hysteresis empirically?I Can we understand cross-correlations between flow, density and
density heterogeneity?I How does driver adaptivity affect the shape of MFDs?
I How should one partition networks in order to producewell-defined MFDs?
I Several groups are attempting to use MFDs as a basis forperimeter control?

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems
Open Problems
I Can we observe anticlockwise hysteresis empirically?I Can we understand cross-correlations between flow, density and
density heterogeneity?I How does driver adaptivity affect the shape of MFDs?I How should one partition networks in order to produce
well-defined MFDs?I Several groups are attempting to use MFDs as a basis for
perimeter control?

Fundamental Diagrams Exclusion Processes Simulations Hysteresis & the 2-bin model Open Problems

Details of the model
Paths
Consider a particular node n in a traffic network
n
mn
nm′
DefinitionA path P is an ordered pair of lanes(λ, λ′) with λ ∈ mn and λ′ ∈ nm′
I Vehicles can only move from onelink to another along paths
I Ignore the actual dynamicsthrough the intersection
I No cells in the intersection – weuse paths to glue the CA onadjacent links together

Details of the model
Paths
Consider a particular node n in a traffic network
n
mn
nm′
P
λ
λ′ DefinitionA path P is an ordered pair of lanes(λ, λ′) with λ ∈ mn and λ′ ∈ nm′
I Vehicles can only move from onelink to another along paths
I Ignore the actual dynamicsthrough the intersection
I No cells in the intersection – weuse paths to glue the CA onadjacent links together

Details of the model
Paths
Consider a particular node n in a traffic network
n
mn
nm′
P
λ
λ′ DefinitionA path P is an ordered pair of lanes(λ, λ′) with λ ∈ mn and λ′ ∈ nm′
I Vehicles can only move from onelink to another along paths
I Ignore the actual dynamicsthrough the intersection
I No cells in the intersection – weuse paths to glue the CA onadjacent links together

Details of the model
Paths
Consider a particular node n in a traffic network
n
mn
nm′
P
λ
λ′ DefinitionA path P is an ordered pair of lanes(λ, λ′) with λ ∈ mn and λ′ ∈ nm′
I Vehicles can only move from onelink to another along paths
I Ignore the actual dynamicsthrough the intersection
I No cells in the intersection – weuse paths to glue the CA onadjacent links together

Details of the model
Paths
Consider a particular node n in a traffic network
n
mn
nm′
P
λ
λ′ DefinitionA path P is an ordered pair of lanes(λ, λ′) with λ ∈ mn and λ′ ∈ nm′
I Vehicles can only move from onelink to another along paths
I Ignore the actual dynamicsthrough the intersection
I No cells in the intersection – weuse paths to glue the CA onadjacent links together

Details of the model
Phases
We can’t simply let all paths be traversed at once – vehicles wouldcrash inside the intersection
nP1
P2 P3
P4
P5
P6P7
P8
DefinitionA phase P of node n is a subset of thepaths belonging to n
I At each instant node n has acurrent phase Pcurrent
I Only paths in Pcurrent may betraversed
I Implement traffic signals usingphases
I Time t :Pcurrent = P1 = {P1, . . . ,P8}

Details of the model
Phases
We can’t simply let all paths be traversed at once – vehicles wouldcrash inside the intersection
nP1
P2 P3
P4
P5
P6P7
P8
DefinitionA phase P of node n is a subset of thepaths belonging to n
I At each instant node n has acurrent phase Pcurrent
I Only paths in Pcurrent may betraversed
I Implement traffic signals usingphases
I Time t :Pcurrent = P1 = {P1, . . . ,P8}

Details of the model
Phases
We can’t simply let all paths be traversed at once – vehicles wouldcrash inside the intersection
nP1
P2 P3
P4
P5
P6P7
P8
DefinitionA phase P of node n is a subset of thepaths belonging to n
I At each instant node n has acurrent phase Pcurrent
I Only paths in Pcurrent may betraversed
I Implement traffic signals usingphases
I Time t :Pcurrent = P1 = {P1, . . . ,P8}

Details of the model
Phases
We can’t simply let all paths be traversed at once – vehicles wouldcrash inside the intersection
nP1
P2 P3
P4
P5
P6P7
P8
DefinitionA phase P of node n is a subset of thepaths belonging to n
I At each instant node n has acurrent phase Pcurrent
I Only paths in Pcurrent may betraversed
I Implement traffic signals usingphases
I Time t :Pcurrent = P1 = {P1, . . . ,P8}

Details of the model
Phases
We can’t simply let all paths be traversed at once – vehicles wouldcrash inside the intersection
nP1
P2 P3
P4
P5
P6P7
P8
DefinitionA phase P of node n is a subset of thepaths belonging to n
I At each instant node n has acurrent phase Pcurrent
I Only paths in Pcurrent may betraversed
I Implement traffic signals usingphases
I Time t :Pcurrent = P1 = {P1, . . . ,P8}

Details of the model
Phases
We can’t simply let all paths be traversed at once – vehicles wouldcrash inside the intersection
nP1
P2 P3
P4
P5
P6P7
P8
DefinitionA phase P of node n is a subset of thepaths belonging to n
I At each instant node n has acurrent phase Pcurrent
I Only paths in Pcurrent may betraversed
I Implement traffic signals usingphases
I Time t :Pcurrent = P1 = {P1, . . . ,P8}

Details of the model
Phases
We can’t simply let all paths be traversed at once – vehicles wouldcrash inside the intersection
n
P9
P10
P11
P12P13
P14P15
P16
DefinitionA phase P of node n is a subset of thepaths belonging to n
I At each instant node n has acurrent phase Pcurrent
I Only paths in Pcurrent may betraversed
I Implement traffic signals usingphases
I Time t + ∆t :Pcurrent = P2 = {P9, . . . ,P16}

Details of the model
Lane changing (dynamic)
In order to model freeways or urban networks we need multiple lanesand lane changing
2 3
2 3
I If min(vn + 1,d (f )n , vmax) > min(vn + 1,dn, vmax) the lane change
is desirableI If d (b)
n ≥ v (b)n the lane change is safe
I If desirable and safe accept with probability pchange
I Allow only left→right (right→left) at odd (even) time steps

Details of the model
Lane changing (dynamic)
In order to model freeways or urban networks we need multiple lanesand lane changing
2 3
dn
2 3
d (f )n
vn
I If min(vn + 1,d (f )n , vmax) > min(vn + 1,dn, vmax) the lane change
is desirable
I If d (b)n ≥ v (b)
n the lane change is safeI If desirable and safe accept with probability pchange
I Allow only left→right (right→left) at odd (even) time steps

Details of the model
Lane changing (dynamic)
In order to model freeways or urban networks we need multiple lanesand lane changing
2 3
dn
2
d (b)n
3
d (f )n
vn
v (b)n
I If min(vn + 1,d (f )n , vmax) > min(vn + 1,dn, vmax) the lane change
is desirableI If d (b)
n ≥ v (b)n the lane change is safe
I If desirable and safe accept with probability pchange
I Allow only left→right (right→left) at odd (even) time steps

Details of the model
Lane changing (dynamic)
In order to model freeways or urban networks we need multiple lanesand lane changing
2 3
dn
2
d (b)n
3
d (f )n
vn
v (b)n
I If min(vn + 1,d (f )n , vmax) > min(vn + 1,dn, vmax) the lane change
is desirableI If d (b)
n ≥ v (b)n the lane change is safe
I If desirable and safe accept with probability pchange
I Allow only left→right (right→left) at odd (even) time steps

Details of the model
Lane changing (dynamic)
In order to model freeways or urban networks we need multiple lanesand lane changing
2
3
dn
2
d (b)n
3
d (f )nv (b)
n
I If min(vn + 1,d (f )n , vmax) > min(vn + 1,dn, vmax) the lane change
is desirableI If d (b)
n ≥ v (b)n the lane change is safe
I If desirable and safe accept with probability pchange
I Allow only left→right (right→left) at odd (even) time steps

Details of the model
Lane changing (dynamic)
In order to model freeways or urban networks we need multiple lanesand lane changing
2
3
dn
2
d (b)n
3
d (f )nv (b)
n
I If min(vn + 1,d (f )n , vmax) > min(vn + 1,dn, vmax) the lane change
is desirableI If d (b)
n ≥ v (b)n the lane change is safe
I If desirable and safe accept with probability pchange
I Allow only left→right (right→left) at odd (even) time steps

Details of the model
Lane changing (topological)
l′l′′ l′′′l
l ′
l ′′
l ′′′
I Red car:not needednot allowed
I Blue car:not neededis allowed
I Green car:needed
I Each vehicle wants to be in a lane for which there exists a pathconsistent with its desired turn
I Only allow dynamical lane changing if it doesn’t contradicttopological lane changing – only blue car can

Details of the model
Lane changing (topological)
l′l′′ l′′′l
l ′
l ′′
l ′′′
I Red car:not needednot allowed
I Blue car:not neededis allowed
I Green car:needed
I Each vehicle wants to be in a lane for which there exists a pathconsistent with its desired turn
I Only allow dynamical lane changing if it doesn’t contradicttopological lane changing – only blue car can

Details of the model
Lane changing (topological)
l′l′′ l′′′l
l ′
l ′′
l ′′′
I Red car:not needednot allowed
I Blue car:not neededis allowed
I Green car:needed
I Each vehicle wants to be in a lane for which there exists a pathconsistent with its desired turn
I Only allow dynamical lane changing if it doesn’t contradicttopological lane changing – only blue car can

Details of the model
Lane changing (topological)
l′l′′ l′′′l
l ′
l ′′
l ′′′
I Red car:not needednot allowed
I Blue car:not neededis allowed
I Green car:needed
I Each vehicle wants to be in a lane for which there exists a pathconsistent with its desired turn
I Only allow dynamical lane changing if it doesn’t contradicttopological lane changing – only blue car can

Details of the model
Lane changing (topological)
l′l′′ l′′′l
l ′
l ′′
l ′′′
I Red car:not needednot allowed
I Blue car:not neededis allowed
I Green car:needed
I Each vehicle wants to be in a lane for which there exists a pathconsistent with its desired turn
I Only allow dynamical lane changing if it doesn’t contradicttopological lane changing – only blue car can

Details of the model
Lane changing (topological)
l′l′′ l′′′l
l ′
l ′′
l ′′′
I Red car:not needednot allowed
I Blue car:not neededis allowed
I Green car:needed
I Each vehicle wants to be in a lane for which there exists a pathconsistent with its desired turn
I Only allow dynamical lane changing if it doesn’t contradicttopological lane changing – only blue car can

Details of the model
Boundaries
I We must consider open systemsI So some links only have one endpoint in the network
I Do not model traffic flow on boundary links
I Each boundary lane λ has a fixed average density ρλI This is a boundary condition

Details of the model
Boundaries
I We must consider open systemsI So some links only have one endpoint in the network
I Do not model traffic flow on boundary links
I Each boundary lane λ has a fixed average density ρλI This is a boundary condition

Details of the model
Boundaries
I We must consider open systemsI So some links only have one endpoint in the network
I Do not model traffic flow on boundary linksI Each boundary lane λ has a fixed average density ρλ
I This is a boundary condition

Details of the model
Boundaries
I We must consider open systemsI So some links only have one endpoint in the network
I Do not model traffic flow on boundary linksI Each boundary lane λ has a fixed average density ρλI This is a boundary condition

Details of the model
Turning decisions
I Each vehicle should know which link it wants to turn into when itreaches the end of its current link
I In this sense the model should be agent-basedI A sophisticated approach would use origin-destination data and
route planning algorithmsI We take a simple approachI For each node n, inlink l = mn, & outlink l ′ = nm′, we input
P(l → l ′) = P(vehicle on link l wants to turn into link l ′)I Turning decision made when vehicle first enters a linkI Turning decisions affect lane changing dynamics

Details of the model
Turning decisions
I Each vehicle should know which link it wants to turn into when itreaches the end of its current link
I In this sense the model should be agent-based
I A sophisticated approach would use origin-destination data androute planning algorithms
I We take a simple approachI For each node n, inlink l = mn, & outlink l ′ = nm′, we input
P(l → l ′) = P(vehicle on link l wants to turn into link l ′)I Turning decision made when vehicle first enters a linkI Turning decisions affect lane changing dynamics

Details of the model
Turning decisions
I Each vehicle should know which link it wants to turn into when itreaches the end of its current link
I In this sense the model should be agent-basedI A sophisticated approach would use origin-destination data and
route planning algorithms
I We take a simple approachI For each node n, inlink l = mn, & outlink l ′ = nm′, we input
P(l → l ′) = P(vehicle on link l wants to turn into link l ′)I Turning decision made when vehicle first enters a linkI Turning decisions affect lane changing dynamics

Details of the model
Turning decisions
I Each vehicle should know which link it wants to turn into when itreaches the end of its current link
I In this sense the model should be agent-basedI A sophisticated approach would use origin-destination data and
route planning algorithmsI We take a simple approach
I For each node n, inlink l = mn, & outlink l ′ = nm′, we inputP(l → l ′) = P(vehicle on link l wants to turn into link l ′)
I Turning decision made when vehicle first enters a linkI Turning decisions affect lane changing dynamics

Details of the model
Turning decisions
I Each vehicle should know which link it wants to turn into when itreaches the end of its current link
I In this sense the model should be agent-basedI A sophisticated approach would use origin-destination data and
route planning algorithmsI We take a simple approachI For each node n, inlink l = mn, & outlink l ′ = nm′, we input
P(l → l ′) = P(vehicle on link l wants to turn into link l ′)
I Turning decision made when vehicle first enters a linkI Turning decisions affect lane changing dynamics

Details of the model
Turning decisions
I Each vehicle should know which link it wants to turn into when itreaches the end of its current link
I In this sense the model should be agent-basedI A sophisticated approach would use origin-destination data and
route planning algorithmsI We take a simple approachI For each node n, inlink l = mn, & outlink l ′ = nm′, we input
P(l → l ′) = P(vehicle on link l wants to turn into link l ′)I Turning decision made when vehicle first enters a link
I Turning decisions affect lane changing dynamics

Details of the model
Turning decisions
I Each vehicle should know which link it wants to turn into when itreaches the end of its current link
I In this sense the model should be agent-basedI A sophisticated approach would use origin-destination data and
route planning algorithmsI We take a simple approachI For each node n, inlink l = mn, & outlink l ′ = nm′, we input
P(l → l ′) = P(vehicle on link l wants to turn into link l ′)I Turning decision made when vehicle first enters a linkI Turning decisions affect lane changing dynamics

Details of the model
Mark paths
l′,3l
λl ′
I Consider each lane λ of each link l
I Let v be the last vehicle on λI Suppose x(v) + v(v) > length(λ)
I If there exists P ∈ Pcurrent with:I inlane(P) = λI outlane(P) has unoccupied first cellI outlink(P) = turn(v)
I Then associate v↔ P (in this case we say P is marked)I Else stop v at the end of λ

Details of the model
Mark paths
l′,3l
λl ′
I Consider each lane λ of each link lI Let v be the last vehicle on λ
I Suppose x(v) + v(v) > length(λ)
I If there exists P ∈ Pcurrent with:I inlane(P) = λI outlane(P) has unoccupied first cellI outlink(P) = turn(v)
I Then associate v↔ P (in this case we say P is marked)I Else stop v at the end of λ

Details of the model
Mark paths
l′,3l
λl ′
I Consider each lane λ of each link lI Let v be the last vehicle on λI Suppose x(v) + v(v) > length(λ)
I If there exists P ∈ Pcurrent with:I inlane(P) = λI outlane(P) has unoccupied first cellI outlink(P) = turn(v)
I Then associate v↔ P (in this case we say P is marked)I Else stop v at the end of λ

Details of the model
Mark paths
l′,3l
λl ′
I Consider each lane λ of each link lI Let v be the last vehicle on λI Suppose x(v) + v(v) > length(λ)
I If there exists P ∈ Pcurrent with:
I inlane(P) = λI outlane(P) has unoccupied first cellI outlink(P) = turn(v)
I Then associate v↔ P (in this case we say P is marked)I Else stop v at the end of λ

Details of the model
Mark paths
l′,3l
λl ′
I Consider each lane λ of each link lI Let v be the last vehicle on λI Suppose x(v) + v(v) > length(λ)
I If there exists P ∈ Pcurrent with:I inlane(P) = λ
I outlane(P) has unoccupied first cellI outlink(P) = turn(v)
I Then associate v↔ P (in this case we say P is marked)I Else stop v at the end of λ

Details of the model
Mark paths
l′,3l
λl ′
I Consider each lane λ of each link lI Let v be the last vehicle on λI Suppose x(v) + v(v) > length(λ)
I If there exists P ∈ Pcurrent with:I inlane(P) = λI outlane(P) has unoccupied first cell
I outlink(P) = turn(v)I Then associate v↔ P (in this case we say P is marked)I Else stop v at the end of λ

Details of the model
Mark paths
l′,3l
λl ′
I Consider each lane λ of each link lI Let v be the last vehicle on λI Suppose x(v) + v(v) > length(λ)
I If there exists P ∈ Pcurrent with:I inlane(P) = λI outlane(P) has unoccupied first cellI outlink(P) = turn(v)
I Then associate v↔ P (in this case we say P is marked)I Else stop v at the end of λ

Details of the model
Mark paths
l′,3l
λl ′
I Consider each lane λ of each link lI Let v be the last vehicle on λI Suppose x(v) + v(v) > length(λ)
I If there exists P ∈ Pcurrent with:I inlane(P) = λI outlane(P) has unoccupied first cellI outlink(P) = turn(v)
I Then associate v↔ P (in this case we say P is marked)
I Else stop v at the end of λ

Details of the model
Mark paths
l′,3l
λl ′
I Consider each lane λ of each link lI Let v be the last vehicle on λI Suppose x(v) + v(v) > length(λ)
I If there exists P ∈ Pcurrent with:I inlane(P) = λI outlane(P) has unoccupied first cellI outlink(P) = turn(v)
I Then associate v↔ P (in this case we say P is marked)I Else stop v at the end of λ

Details of the model
Clear pathsConsider each marked path P of each node n
I If P must give way to another marked path P ′ of n
I Stop the vehicle v↔ P on the last cell of inlane(P)
I Else move the vehicle v↔ P to the first cell of outlane(P)

Details of the model
Clear pathsConsider each marked path P of each node n
I If P must give way to another marked path P ′ of n
I Stop the vehicle v↔ P on the last cell of inlane(P)
I Else move the vehicle v↔ P to the first cell of outlane(P)

Details of the model
Clear pathsConsider each marked path P of each node n
I If P must give way to another marked path P ′ of nI Stop the vehicle v↔ P on the last cell of inlane(P)
I Else move the vehicle v↔ P to the first cell of outlane(P)

Details of the model
Clear pathsConsider each marked path P of each node n
I If P must give way to another marked path P ′ of nI Stop the vehicle v↔ P on the last cell of inlane(P)
I Else move the vehicle v↔ P to the first cell of outlane(P)

Details of the model
Clear pathsConsider each marked path P of each node n
I If P must give way to another marked path P ′ of nI Stop the vehicle v↔ P on the last cell of inlane(P)
I Else move the vehicle v↔ P to the first cell of outlane(P)




![Voronoi diagrams--a survey of a fundamental geometric data ...misha/Spring20/Aurenhammer91.pdfComplexity]: Nonnumerical Algorithms and Problems–geometrical problems and computations;](https://img.pdfslide.us/doc/110x75/5f3f6cd39b1651694c5aa0f0/voronoi-diagrams-a-survey-of-a-fundamental-geometric-data-mishaspring20-complexity.jpg)