Embed Size (px)
Citation preview

Nota: specifiche soggette a modifica senza preavviso.Cat. No. I131E-IT-01A
Austria Tel: +43 (0) 2236 377 800 www.industrial.omron.at
Belgio Tel: +32 (0) 2 466 24 80 www.industrial.omron.be
Repubblica Ceca Tel: +420 234 602 602 www.industrial.omron.cz
Danimarca Tel: +45 43 44 00 11 www.industrial.omron.dk
Finlandia Tel: +358 (0) 207 464 200 www.industrial.omron.fi
Francia Tel: +33 (0) 1 56 63 70 00 www.industrial.omron.fr
Germania Tel: +49 (0) 2173 680 00 www.industrial.omron.de
Ungheria Tel: +36 (0) 1 399 30 50 www.industrial.omron.hu
Italia Tel: +39 02 32 681 www.industrial.omron.it
Africa e Medio OrienteTel: +31 (0) 23 568 11 00 www.industrial.omron.eu
Olanda Tel: +31 (0) 23 568 11 00 www.industrial.omron.nl
Norvegia Tel: +47 (0) 22 65 75 00 www.industrial.omron.no
Polonia Tel: +48 (0) 22 645 78 60 www.industrial.omron.com.pl
Portogallo Tel: +351 21 942 94 00 www.industrial.omron.pt
Russia Tel: +7 495 648 94 50 www.industrial.omron.ru
Spagna Tel: +34 913 777 900 www.industrial.omron.es
Svezia Tel: +46 (0) 8 632 35 00 www.industrial.omron.se
Svizzera Tel: +41 41 748 13 13www.industrial.omron.ch
Turchia Tel: +90 (0) 216 474 00 40 www.industrial.omron.com.tr
Regno Unito Tel: +44 (0) 870 752 08 61 www.industrial.omron.co.uk
OMRON EUROPE B.V. Wegalaan 67-69, NL-2132 JD, Hoofddorp, Paesi Bassi. Tel: +31 (0) 23 568 13 00 Fax: +31 (0) 23 568 13 88 www.industrial.omron.eu
Inverter per ascensori LX per tutti I tipi di motori
GUIDA RAPIDA DI UTILIZZOCat. No. I131E-IT-01A
LX Inverter per ascensori per tutti i tipi di motoriModello: 3G3LXClasse 200 V Ingresso trifase 4,0... 37 kWClasse 400 V Ingresso trifase 3,7... 37 kW
GUIDA RAPIDA DI UTILIZZO
Cat. No. I131E-IT-01A


i
Sommario
SEZIONE 1Caratteristiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1Caratteristiche generali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1Potenze nominali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3Dimensioni cablaggio e protezioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4Capacità di sovraccarico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5Dimensioni esterne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
SEZIONE 2Cablaggio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11Informazioni generali sul cablaggio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11Cablaggio alimentazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12Cablaggio di controllo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13Schede opzionali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16Piastre di messa a terra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
SEZIONE 3Programmazione dell'inverter LX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25Utilizzo del display LCD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
SEZIONE 4Avvio sistema di sollevamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35Impostazioni modalità di controllo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35Impostazione dei parametri degli ascensori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36Interfaccia per l'unità di controllo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
SEZIONE 5Tuning sistema di sollevamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47Preparazione dei parametri del motore per l'autotuning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47Autotuning statico offset del magnete (solo motore PM) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49Tuning statico totale (motore PM o IM) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49Tuning rotativo completo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50Utilizzo del tuning statico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51Precauzioni sul motore PM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
SEZIONE 6Tuning per un funzionamento regolare dell'ascensore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53Parametro singolo per una rigidità dei controlli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53Impostazione del parametro di inerzia (se non è possibile regolare l'autotuning rotativo) . . . . . . . . . . . . . . . . . . . . 54Impostazioni dei singoli guadagni durante le sezioni di corsa dell'ascensore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54Guadagno di posizione per ad anello chiuso all'avvio e all'arresto (solo ad anello chiuso) . . . . . . . . . . . . . . . . . . . 55Tuning del rollback e rumore all'avvio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56Compensazione delle celle di carico all'avvio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57Rumore d'urto all'arresto dopo l'avvenuta chiusura del freno con i motori PM . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
SEZIONE 7Altre funzioni per ascensori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61Piano rapido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61Trasporto passeggeri di emergenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63Controllo della posizione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66

ii
Sommario
SEZIONE 8Tabella dei parametri di riferimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73Monitoraggio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73Tabella dei parametri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76Parametri utente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109Errori di sequenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109Tutti i codici di errore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110

1
SEZIONE 1Caratteristiche
1-1 Caratteristiche generali
Car
atte
ristic
he d
i con
trollo
Metodi di controllo supportati • Controllo V/f per motori a induzione• Controllo vettoriale sensorless per motori a induzione• Controllo vettoriale ad anello chiuso per motori a induzioneControllo vettoriale ad anello chiuso per motori a magneti permanenti
Frequenza portante Impostazione predefinita: 8 kHz Impostazione predefinita: 5 kHz
È necessario diminuire la corrente o la temperatura a frequenze portanti elevatePrecisione della frequenza ±0,01% (digitale) e ±0,2% (analogico)Capacità di sovraccarico Inverter progettato per condizioni di sovraccarico elevato e sollevamento con carico
(carico 50%) 150% per 30 s/200% per 4 s/75% per valore nominale funzionamento continuo
Coppia di spunto 200%, 0,3 Hz di picco (controllo vettoriale sensorless)150%, 0 Hz di picco (vettore ad anello chiuso)
Frenatura rigenerativa (la resistenza esterna è collegata)
Coppia rigenerativa 150… 80%Il transistor di frenatura è incluso fino a 22 kW. Resistenza di frenatura esterna richiesta
Frenatura c.c. La frenatura c.c. viene applicata nel funzionamento ad anello aperto a ciascuna sequenza di corsa dell'ascensoreIntervallo di potenza frenatura c.c. 0… 100% (è necessario diminuire le frequenze portanti superiori a valori predefiniti)Intervallo di tempo frenatura c.c. 0… 10,00 s
Controllo del movimento a strappi del profilo di corsa
Controllo totale del movimento a strappi di finecorsa (impostazioni curva a S libere)Ciascuna velocità selezionata può assegnare automaticamente un'impostazione di accelerazione/decelerazione differente
Limitazione sovraccarico Controllo della compensazione della frequenza per evitare casi di sovracorrente (disattivato per impostazione predefinita)Funzione di controllo della sovracorrente (disattivato per impostazione predefinita)
Encoder applicativo Incrementale: line driver da 5 V (3G3AX-PG01)Assoluto: EnDat 2.1, EnDat 2.2 e HIPERFACE (3G3AX-ABS o 3G3AX-ABS30)
Inte
rfacc
ia u
tent
e
Istru
zion
e di
vel
ocità
Da console di programmazione con display LCD
Impostazione della frequenza, modifica del testo, funzione COPY, diagnostica avanzata, orologio in tempo reale
Istruzione di velocità multipasso
Sette velocità multipasso per uso genericoDieci velocità di sollevamento con nomi di mercato di ascensori standard
Ingresso esterno Ingresso di tensione: 0… 10 Vc.c. (terminale O) e –10… +10 Vc.c. (terminale O2)Ingresso corrente: 0… 20 mA (terminale OI)Comunicazione RS485 (protocollo: Modbus-RTU)
Istru
zion
i di
azio
nam
ento Da console di
programmazione con display LCD
Tasto FWD/REV e tasto STOP
Da ingressi digitali Avvio con UP (verso l'alto) e DWN (verso il basso)Ingresso esterno Comunicazione RS485 (protocollo: Modbus-RTU)
Term
inal
e di
ingr
esso
Terminale di ingresso multifunzione
Terminale di ingresso digitale x 7Alimentazione dell'interfaccia 24 Vc.c.È possibile configurare la modalità Sinking ( uscite unita di controllo NPN) o Sourcing ( uscite unità di controllo PNP)Opzionale: 5 ingressi, 3 uscite (è richiesta una scheda di espansione I/O 3G3AX-EIO)Caratteristiche elettriche
Tensione tra ingresso e PLC: 18 Vc.c. o superioreImpedenza di ingresso tra ingresso e PLC: circa 4,7 kΩTensione massima tra ingresso e PLC: 27 Vc.c.Corrente di carico con alimentazione da 27 Vc.c.: circa 5,6 mA

2
Caratteristiche generali Sezione 1-1
Inte
rfacc
ia u
tent
e
Term
inal
e di
ingr
esso
Terminale di ingresso multifunzione
Funzioni: SET (imposta dati secondo motore), FRS (Arresto rotazione libera), EXT (Errore esterno), SFT (Blocco software), RS (Reset), PCLR (Cancella posizione corrente),MI1 (Ingresso per uso generico 1), MI2 (Ingresso per uso generico 2), MI3 (Ingresso per uso generico 3), MI4 (Ingresso per uso generico 4),MI5 (Ingresso per uso generico 5), MI6 (Ingresso per uso generico 6),MI7 (Ingresso per uso generico 7), MI8 (Ingresso per uso generico 8)SPD1 (Impostazione multivelocità 1), SPD2 (Impostazione multivelocità 2), SPD3 (Impostazione multivelocità 3), RESC (Emergenza), INSP (Ispezione), RL (Rilivellamento), COK (Segnale controllo contattore), BOK (Segnale controllo freno), FP1 (Posizione piano 1), FP2 (Posizione piano 2), FP3 (Posizione piano 3), FP4 (Posizione piano 4), FP5 (Posizione piano 5), PAL (Trigger blocco dati autoapprendimento), TCL (Trigger blocco polarizzazione coppia), LVS (Segnale livellamento), NFS (Piano vicino), CMC (Cambio modalità di controllo)
Interruttore di sicurezza Due ingressi (GS1, GS2)Protezione Sovracorrente, Sovratensione, Sottotensione, Sovraccarico (funzione termica
elettrica), Errore di terra all'avvio, Errore esterno, Errore EEPROM, Errore CT, Errore CPU, Sovraccarico resistenza di frenatura, Rilevamento errore faseErrore riferimento velocità, Errore contattore, Errore freno, Rilevamento rotazione errata, Accelerazione eccessiva, Velocità eccessiva, Errore deviazione velocità, FB opzionale non collegato
Ope
rato
re Console di programmazione con display LCD
LCD a 5 righe, colore retroilluminazione: bianco (@normale), Rosso (@Errore/Avvertenza)
Tasti FWD RUN, REV RUN, STOP/RESET, REMOTE, READ, WRITE, ESC, SET, UP, DOWN, PREV. PAGE, NEXT PAGE
Req
uisi
ti di
sis
tem
a
Costruzione di protezione IP20Temperatura ambiente per funzionamento
Potrebbe essere applicata una diminuzione –10… 40°C in caso di uscita di corrente o frequenza portante elevata
Temperatura di stoccaggio –20… 65°CUmidità 20… 90% RH (in assenza di condensa)Vibrazioni 5,9 m/s2 (0,6 G) 10… 55 Hz (fino a 22 kW)
2,94 m/s2 (0,3 G) 10… 55 Hz (30 kW e superiore)Altitudine Altitudine pari a 1.000 m o inferiore e camera (in assenza di gas caustico e polvere)
Durata design dei componenti 10 anni (la durata del design rappresenta un calcolo ed è fuori garanzia)Standard globali Approvazioni CE, UL, c-ULConformità EU RoHS Conformità EU RoHS limitando l'uso di sostanze pericolose
Opz
iona
le Retroazione encoder opzionale
3G3AX-ABS30 o 3G3AX-ABS: incrementale, EnDat e HIPERFACE con 1 scheda (2 ingressi encoder)3G3AX-PG01: incrementale, (1 ingresso encoder)
Miglioramento I/O 3G3AX-EIO: 5 ingressi digitali/2 uscite a relè/1 uscita a collettore aperto

3
Potenze nominali Sezione 1-2
1-2 Potenze nominali
Caratteristiche della classe 200 V trifaseModello 3G3LX-@ A2040 A2055 A2075 A2110 A2150 A2185 A2220 A2300 A2370Motore (kW) 4,0 5,5 7,5 11,0 15,0 18,5 22,0 30,0 37,0
Val
ori n
omin
ali d
i usc
ita Capacità inverter (kVA)
200 V 5,7 8,3 11,0 15,9 22,1 26,3 32,9 41,9 50,2240 V 6,8 9,9 13,3 19,1 26,6 31,5 39,4 50,2 60,2
Corrente di uscita nominale (A) (3 min, 50% ED) 17,5 25 33 49 64 80 96 130 160
Livello sovracorrente (A) 51,3 74,7 99,6 143,1 199,1 236,5 295,6 376,5 451,1Tensione massima di uscita (V) Trifase 200… 240 V (a seconda della tensione di ingresso)
Frequenza di uscita massima (Hz) Max. 400 Hz
Tensione di ingressoSorgente di controllo: Monofase 200… 240 V (+10%, –15%) e 50/60 Hz (±5%)Alimentazione del circuito principale: Trifase, 200… 240 V (+10%, –15%) e 50/60 Hz (±5%)
Fren
atur
a
Circuito di frenatura Con unità di controllo integrata OpzionaleResistenza minima (Ω) 24 16 10 10 7,5 7,5 5 - -Carico di lavoro alla resistenza minima 10% - -
Resistenza minima al funzionamento continuo (Ω) 100 50 50 50 35 35 35 - -
DimensioneL (mm) 150 210 210 210 250 250 250 310 310A (mm) 255 260 260 260 390 390 390 540 550D (mm) 140 170 170 170 190 190 190 195 250
Struttura di protezione IP20Metodo di raffreddamento Raffreddamento ad aria forzata
Caratteristiche classe 400 V trifaseModello 3G3LX-@ A4037 A4040 A4055 A4075 A4110 A4150 A4185 A4220 A4300 A4370Motore (kW) 3,7 4,0 5,5 7,5 11,0 15,0 18,5 22,0 30,0 37,0
Val
ori n
omin
ali d
i usc
ita Capacità inverter (kVA)
400 V 5,7 5,9 9,7 13,1 17,3 22,1 26,3 33,2 40,1 51,9480 V 6,8 7,1 11,6 15,8 20,7 26,6 31,5 39,9 48,2 62,3
Corrente di uscita nominale (A) (3 min, 50% ED) 9 11 14 19 27 34 41 48 65 80
Livello sovracorrente (A) 28,0 34,2 43,6 59,1 77,8 99,6 118,2 149,3 180,5 233,3Tensione massima di uscita (V) Trifase 380… 480 V (a seconda della tensione di ingresso)
Frequenza di uscita massima (Hz) Max. 400 Hz
Tensione di ingressoSorgente di controllo: Monofase 200… 240 V (+10%, –15%) e 50/60 Hz (±5%)Alimentazione del circuito principale: Trifase, 380… 480 V (+10%, –15%) e 50/60 Hz (±5%)
Fren
atur
a
Circuito di frenatura Con unità di controllo integrata OpzionaleResistenza minima (Ω) 70 70 70 35 35 24 24 20 - -Carico di lavoro alla resistenza minima 10% - -
Resistenza minima al funzionamento continuo (Ω) 200 200 200 150 150 100 100 100 - -
DimensioneL (mm) 150 210 210 210 210 250 250 250 310 390A (mm) 255 260 260 260 260 390 390 390 540 550D (mm) 140 170 170 170 170 190 190 190 195 250
Struttura di protezione IP20Metodo di raffreddamento Raffreddamento ad aria forzata
4
Dimensioni cablaggio e protezioni Sezione 1-3
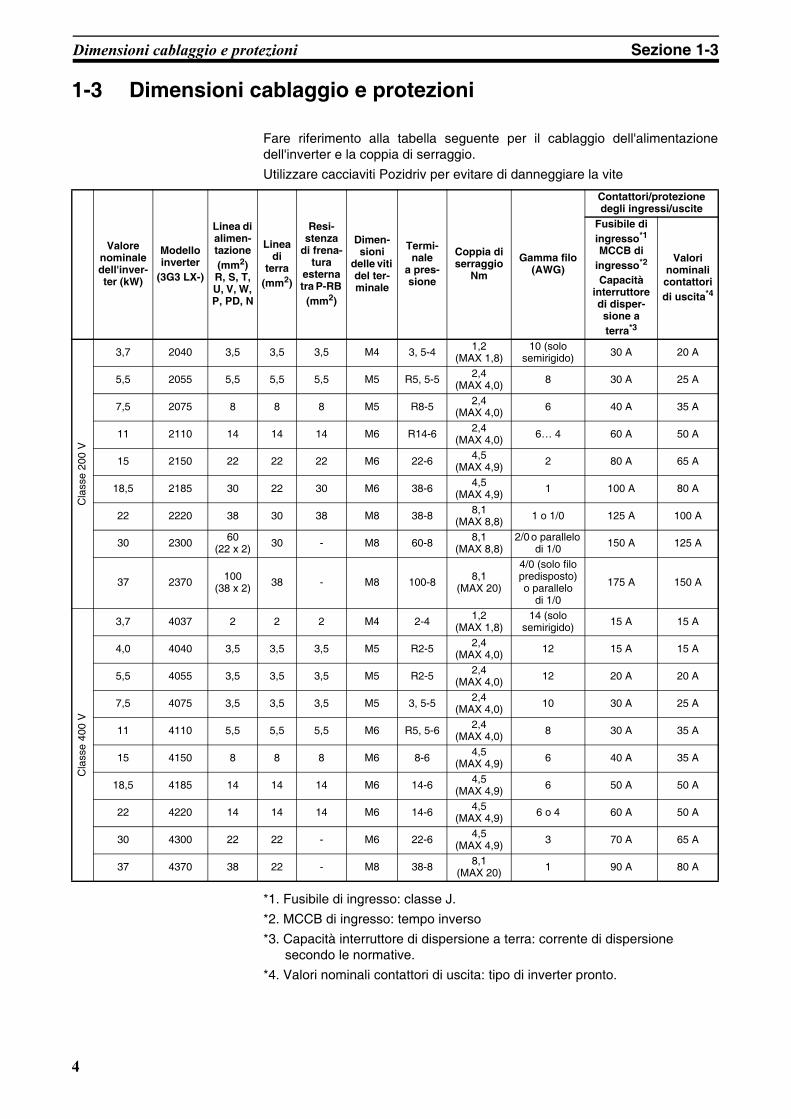
1-3 Dimensioni cablaggio e protezioni
Fare riferimento alla tabella seguente per il cablaggio dell'alimentazionedell'inverter e la coppia di serraggio.Utilizzare cacciaviti Pozidriv per evitare di danneggiare la vite
*1. Fusibile di ingresso: classe J.*2. MCCB di ingresso: tempo inverso*3. Capacità interruttore di dispersione a terra: corrente di dispersione
secondo le normative.*4. Valori nominali contattori di uscita: tipo di inverter pronto.
Valore nominale dell'inver-ter (kW)
Modello inverter
(3G3 LX-)
Linea di alimen-tazione (mm2) R, S, T, U, V, W, P, PD, N
Linea di
terra (mm2)
Resi-stenza
di frena-tura
esterna tra P-RB (mm2)
Dimen-sioni
delle viti del ter-minale
Termi-nale
a pres-sione
Coppia di serraggio
Nm
Gamma filo (AWG)
Contattori/protezione degli ingressi/uscite
Fusibile di ingresso*1 MCCB di
ingresso*2
Capacità interruttore di disper-sione a terra*3
Valori nominali contattori di uscita*4
Cla
sse
200
V
3,7 2040 3,5 3,5 3,5 M4 3, 5-4 1,2 (MAX 1,8)
10 (solo semirigido) 30 A 20 A
5,5 2055 5,5 5,5 5,5 M5 R5, 5-5 2,4 (MAX 4,0) 8 30 A 25 A
7,5 2075 8 8 8 M5 R8-5 2,4 (MAX 4,0) 6 40 A 35 A
11 2110 14 14 14 M6 R14-6 2,4 (MAX 4,0) 6… 4 60 A 50 A
15 2150 22 22 22 M6 22-6 4,5 (MAX 4,9) 2 80 A 65 A
18,5 2185 30 22 30 M6 38-6 4,5 (MAX 4,9) 1 100 A 80 A
22 2220 38 30 38 M8 38-8 8,1 (MAX 8,8) 1 o 1/0 125 A 100 A
30 2300 60 (22 x 2) 30 - M8 60-8 8,1
(MAX 8,8)2/0 o parallelo
di 1/0 150 A 125 A
37 2370 100 (38 x 2) 38 - M8 100-8 8,1
(MAX 20)
4/0 (solo filo predisposto) o parallelo
di 1/0
175 A 150 A
Cla
sse
400
V
3,7 4037 2 2 2 M4 2-4 1,2 (MAX 1,8)
14 (solo semirigido) 15 A 15 A
4,0 4040 3,5 3,5 3,5 M5 R2-5 2,4 (MAX 4,0) 12 15 A 15 A
5,5 4055 3,5 3,5 3,5 M5 R2-5 2,4 (MAX 4,0) 12 20 A 20 A
7,5 4075 3,5 3,5 3,5 M5 3, 5-5 2,4 (MAX 4,0) 10 30 A 25 A
11 4110 5,5 5,5 5,5 M6 R5, 5-6 2,4 (MAX 4,0) 8 30 A 35 A
15 4150 8 8 8 M6 8-6 4,5 (MAX 4,9) 6 40 A 35 A
18,5 4185 14 14 14 M6 14-6 4,5 (MAX 4,9) 6 50 A 50 A
22 4220 14 14 14 M6 14-6 4,5 (MAX 4,9) 6 o 4 60 A 50 A
30 4300 22 22 - M6 22-6 4,5 (MAX 4,9) 3 70 A 65 A
37 4370 38 22 - M8 38-8 8,1 (MAX 20) 1 90 A 80 A

5
Capacità di sovraccarico Sezione 1-4
1-4 Capacità di sovraccarico
Capacità di sovraccarico: 150% 30 s/200% 4 sPer la protezione dell'inverter:- La corrente nominale dell'inverter è una condizione pari a 3min 50% ED, il
carico di corrente di sovraccarico è 150% 30 s (i valori nominali continuisono il 75% dei valori nominali dell'unità di controllo).
- Gli elettroni termici delle seguenti caratteristiche di limite di tempo funzionanosecondo questa specifica.
Nota 1: non è possibile effettuare modifiche a livello, in quanto lo scopo è diproteggere l'inverter.
Nota 2: quando il valore integrato della corrente supera la caratteristica dilimite di tempo, l'inverter entra in una condizione di errore(E39: sovraccarico unità di controllo).
Coppia di spunto:- 200% 0,3 Hz (controllo vettoriale sensorless = controllo vettoriale ad anello aperto)- 150% 0 Hz (controllo vettoriale ad anello chiuso quando unito a un motore
di dimensioni ridotte)
Tempo di
rilevamento
Corrente
di uscita
Caratteristica di limite di tempo per unità di controllo
90 sec
30 sec
4 sec
100% 150% 200%
6
Dimensioni esterne Sezione 1-5
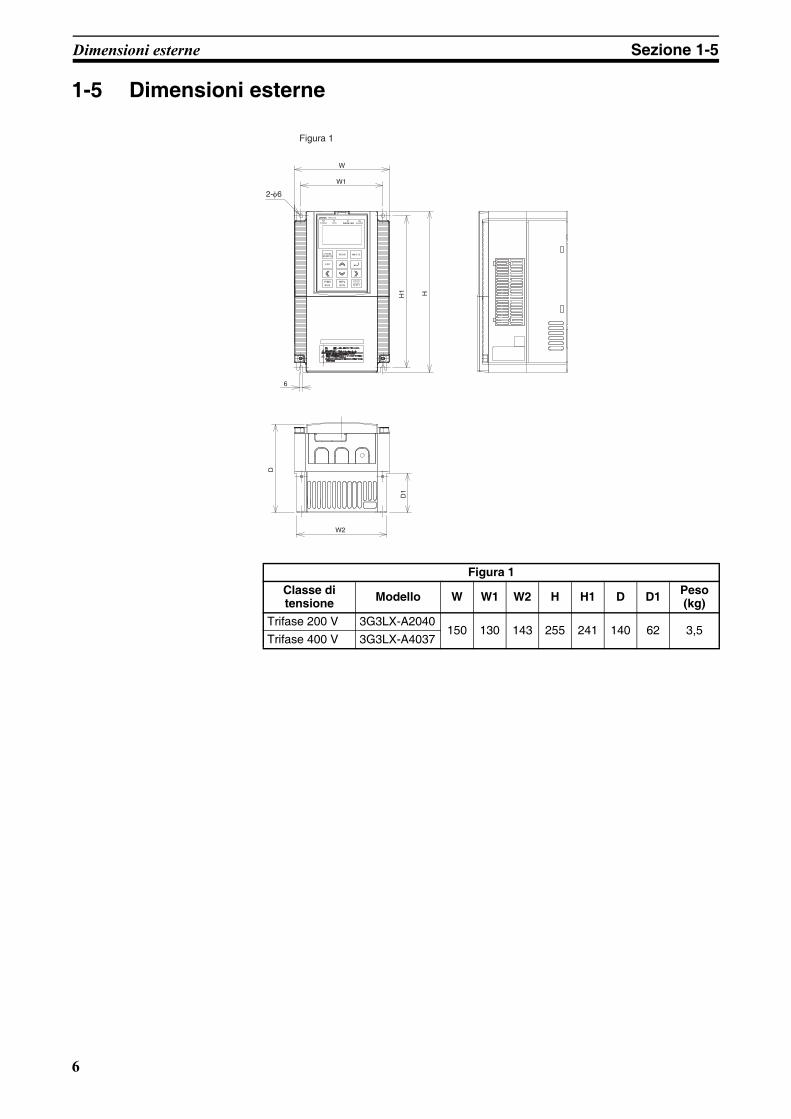
1-5 Dimensioni esterne
Figura 1Classe di tensione Modello W W1 W2 H H1 D D1 Peso
(kg)Trifase 200 V 3G3LX-A2040
150 130 143 255 241 140 62 3,5Trifase 400 V 3G3LX-A4037
W
W1
W2
6
D
D1
H1 H
Figura 1
2-φ6

7
Dimensioni esterne Sezione 1-5
Figura 2Classe di tensione Modello W W1 W2 H H1 D D1 D2 Peso
(kg)Trifase 200 V 3G3LX-2055
210 189 203 260 246 170 82 13,6 6
3G3LX-20753G3LX-2110
Trifase 400 V 3G3LX-40403G3LX-40553G3LX-40753G3LX-4110
W2
D1D
2
W1
7
H1
H
W
D
Figura 2
2-φ7

8
Dimensioni esterne Sezione 1-5
Figura 3Classe di tensione Modello W W1 W2 H H1 D D1 D2 Peso
(kg)Trifase 200 V 3G3LX-A2150
250 229 244 390 376 190 83 9,5 14
3G3LX-A21853G3LX-A2220
Trifase 400 V 3G3LX-A41503G3LX-A41853G3LX-A4220
W1
7
W2
D2 D1
H1
H
W
D
Figura 3
2-φ7
9
Dimensioni esterne Sezione 1-5
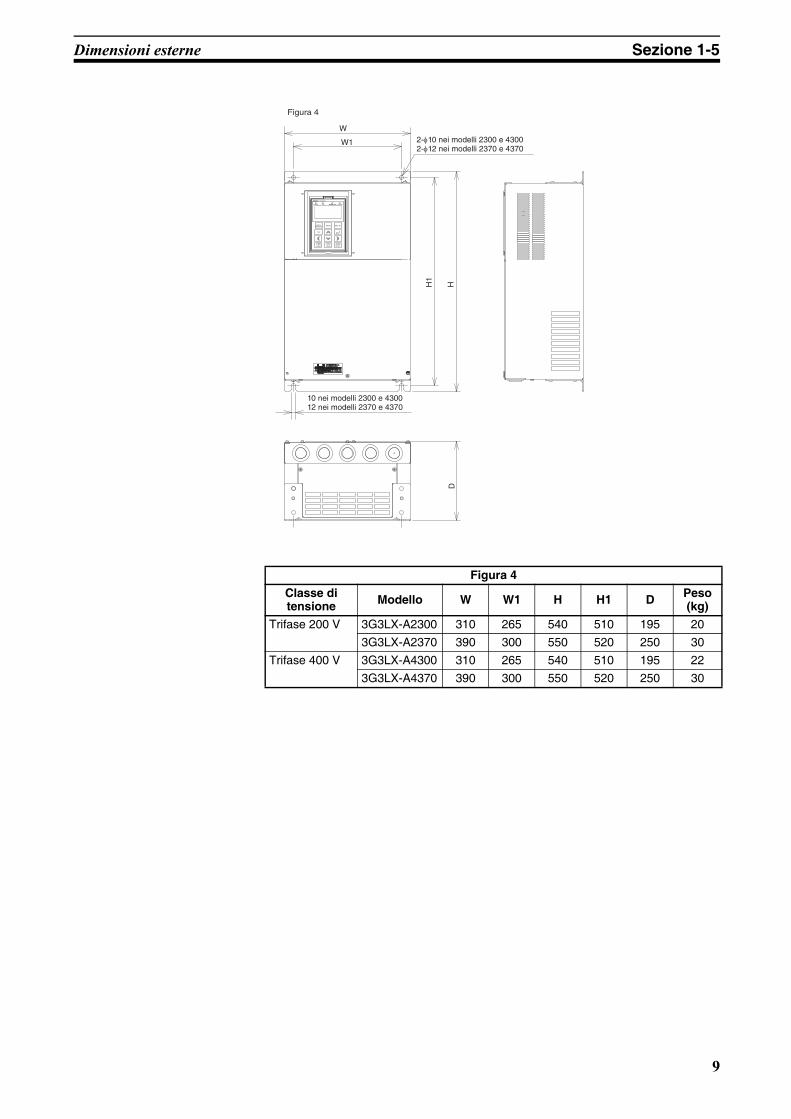
Figura 4Classe di tensione Modello W W1 H H1 D Peso
(kg)Trifase 200 V 3G3LX-A2300 310 265 540 510 195 20
3G3LX-A2370 390 300 550 520 250 30Trifase 400 V 3G3LX-A4300 310 265 540 510 195 22
3G3LX-A4370 390 300 550 520 250 30
W
H1
HD
W1
Figura 4
2-φ10 nei modelli 2300 e 43002-φ12 nei modelli 2370 e 4370
10 nei modelli 2300 e 430012 nei modelli 2370 e 4370

10
Dimensioni esterne Sezione 1-5

11
SEZIONE 2Cablaggio
2-1 Informazioni generali sul cablaggio
R (L1)
S (L2)
T (L3)
R 0
T0
U (T1)
V (T2)
W (T3)
GS1
GS2
CM1
11a
12a
13a
11c
12c
13c
AL0
AL1
AL2
P24
PLC
PD (+1)
P (+)
R B
N (–)
L
0... 10 V
–10... +10 V
0... 20 mA
CM1
FM
L
A M
AM I
S P
SN
R P
SN
RS-485
OPT1C
OPT2C
IM/PM
3G3LX
RJ45RS-422
Terminalemulti ingresso
Terminalearresto di sicurezza
Terminaleingresso
analogico
Terminaleuscita
analogica
Reattanza c.a. ingresso.Armonica e isolamento
Motore
Encoder
Se il ponticello PLC-P24: NPN con alimentazione interna (uscita NPN a CM1)
Uscita dV/dtReattanza c.a.Può essere richiestase la lunghezza del cavo supera i 50 m
0... 10 V
0... 20 mA
Impulsi da 10 V PWM/freq.
–10 Vc.c.
Alimentazioneesterna
+10 Vc.c.
0 V
FusibiliProtezione della reteVedere la tabella
Se il ponticello PLC-CM1: PNP con alimentazione interna (uscita PNP a P24)
Alimentazioneesterna
NOTA: non collegare CM1 alla messa a terra
NOTA: non collegareCM1 alla messa a terra
NOTA: non collegare L alla messa a terra
3A
MCCB di ingressoProtezione della rete
Vedere la tabella
Contattori di uscita(per EN-81, 2richiesto quando nonsi utilizza L'ARRESTO DI SICUREZZA)
NOTA: dispositivi progettatiper supportare l'uscita dell'inverter
Cavo schermato del motore (per ridurre al minimo le EMC emesse).Messa a terra di entrambe le estremità
O
Uscita a impulsi da 10 V FM PWMTranne per F/I digitale mon.(50% carico di lavoro 0… 3,6 KHz)Carico massimo 1,2 mA
Scheda opzionale 2– I/O esteso– Opzioni Fieldbus
Scheda opzionale 1– Schede dell'encoder
Uscita di correnteZ consentita = 250 Ω
Uscita di tensioneMax 2 mA
Relèmultifunzione
250 Vc.a.5 A resistivo1 A induttivo
Min 1 Vc.c., 1 mA
250 Vc.a./30 Vc.c.5 A resistivo1 A induttivo
Min 1 Vc.c., 1 mA
Spec. ingresso a PLC:Vmin = 18,5 Vc.c.Vmax = 27 Vc.c.Z = 4,7 kOIdc (27 Vc.c.) = 5,6 mA
3 (vel. superiore)
1 (su)
2 (giù)
4 (ispezione)
5 (livellamento)
6 (reset)
7 (rilivellamento)
Trifase200… 240 V
da 380 a 480 V(+10%, –15%)
50… 60 Hz + –5%
Monofase200… 240 V
(+10%, –15%)50… 60 Hz + –5%
DCL(per il migliora-mento delle armoniche)O corto
Resistenzadi frenaturaLX <= 22 kW
Cavo schermato della resistenza(per ridurre al minimo le EMC emesse).
Console di programmazione condisplay LCD a 5 righe
(standard)
H 10 Vc.c.
O Z = 10 kΩ, max 12 V
O2 Z = 10 kΩ, max 12 V
OI Z = 100 Ω, max 24 mA
Filtro EMC
Filtro EMC
12
Cablaggio alimentazione Sezione 2-2
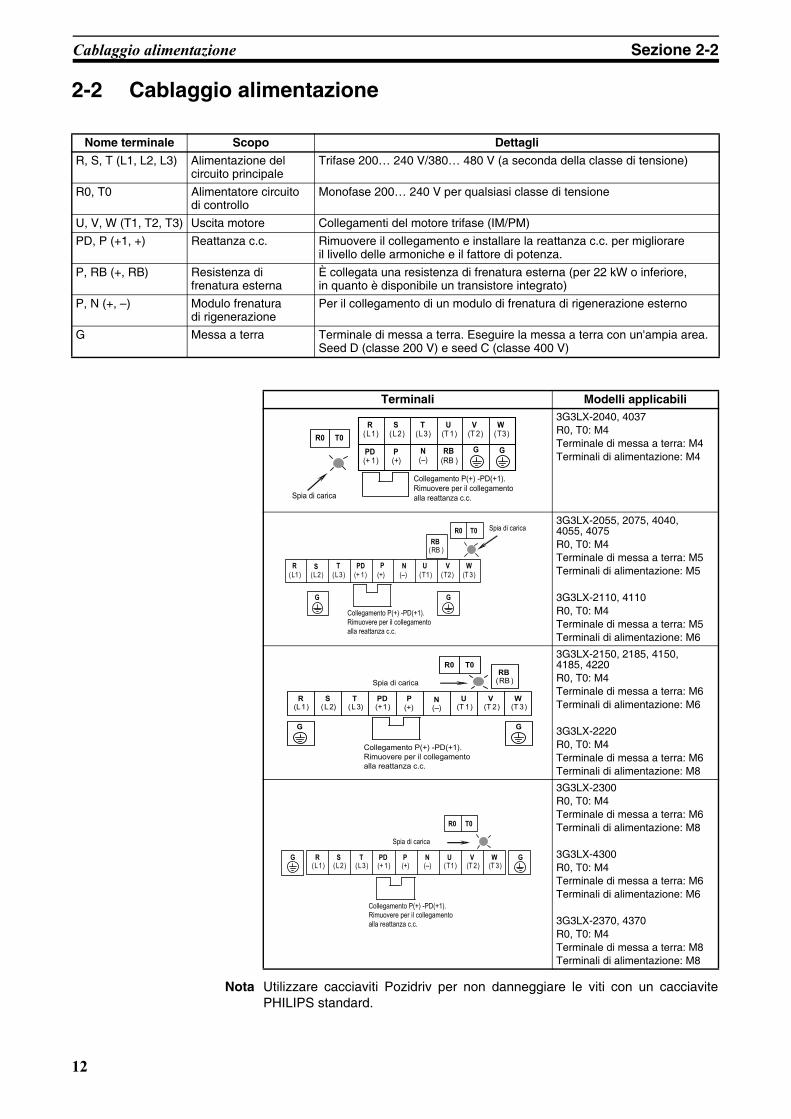
2-2 Cablaggio alimentazione
Nota Utilizzare cacciaviti Pozidriv per non danneggiare le viti con un cacciavitePHILIPS standard.
Nome terminale Scopo DettagliR, S, T (L1, L2, L3) Alimentazione del
circuito principaleTrifase 200… 240 V/380… 480 V (a seconda della classe di tensione)
R0, T0 Alimentatore circuito di controllo
Monofase 200… 240 V per qualsiasi classe di tensione
U, V, W (T1, T2, T3) Uscita motore Collegamenti del motore trifase (IM/PM)PD, P (+1, +) Reattanza c.c. Rimuovere il collegamento e installare la reattanza c.c. per migliorare
il livello delle armoniche e il fattore di potenza.P, RB (+, RB) Resistenza di
frenatura esternaÈ collegata una resistenza di frenatura esterna (per 22 kW o inferiore, in quanto è disponibile un transistore integrato)
P, N (+, –) Modulo frenatura di rigenerazione
Per il collegamento di un modulo di frenatura di rigenerazione esterno
G Messa a terra Terminale di messa a terra. Eseguire la messa a terra con un'ampia area. Seed D (classe 200 V) e seed C (classe 400 V)
Terminali Modelli applicabili3G3LX-2040, 4037R0, T0: M4Terminale di messa a terra: M4Terminali di alimentazione: M4
3G3LX-2055, 2075, 4040, 4055, 4075R0, T0: M4Terminale di messa a terra: M5Terminali di alimentazione: M5
3G3LX-2110, 4110R0, T0: M4Terminale di messa a terra: M5Terminali di alimentazione: M6
3G3LX-2150, 2185, 4150, 4185, 4220R0, T0: M4Terminale di messa a terra: M6Terminali di alimentazione: M6
3G3LX-2220R0, T0: M4Terminale di messa a terra: M6Terminali di alimentazione: M8
3G3LX-2300R0, T0: M4Terminale di messa a terra: M6Terminali di alimentazione: M8
3G3LX-4300R0, T0: M4Terminale di messa a terra: M6Terminali di alimentazione: M6
3G3LX-2370, 4370R0, T0: M4Terminale di messa a terra: M8Terminali di alimentazione: M8
R0 T0
R(L1)
S(L2)
T(L3)
U(T 1)
V(T 2)
W(T3)
PD(+ 1)
P(+)
N(–)
RB(RB )
GG
Spia di carica
Collegamento P(+) -PD(+1).Rimuovere per il collegamento alla reattanza c.c.
R(L1)
S(L2)
T(L3)
PD(+ 1)
P(+)
N(–)
U(T1)
V(T2)
W(T 3)
RB(RB )
GG
R0 T0 Spia di carica
Collegamento P(+) -PD(+1).Rimuovere per il collegamento alla reattanza c.c.
R(L1)
S(L2)
T(L3)
PD(+1)
P(+)
N(–)
U(T 1)
V(T 2)
W(T 3)
RB(RB )
GG
R0 T0
Spia di carica
Collegamento P(+) -PD(+1).Rimuovere per il collegamento alla reattanza c.c.
G GR(L1)
S(L2)
T(L3)
PD(+ 1)
P(+)
N(–)
U(T1)
V(T 2)
W(T 3)
R0 T0
Spia di carica
Collegamento P(+) -PD(+1).Rimuovere per il collegamento alla reattanza c.c.

13
Cablaggio di controllo Sezione 2-3
2-3 Cablaggio di controllo
TM 2TM 1 B
TM 1 A
TM 3 A
TM 3 C TM 3B
Terminali di controllo principali Uscita a relè
PLCP24AMIOIOL CM 1 GS 2 GS 1 2 1
34CM 1567THFMAMO 2HSP SN RP SN AL 0 AL 1 AL 2
13 C 13 A 12 C 12 A 11 C 11 A
RS-485
Tipo Nome Scopo Dettagli Caratteristiche elettriche
Ana
logi
co
Alimen-tazione
L Alimentazione comune analogica
Terminale comune per ingressi analogici (O, O2, OI) e uscite analogiche (AM, AMI). Nota: non collegare alla messa a terra.
H Alimentazione per potenziometro analogico
Alimentazione da +10 Vc.c. per potenziometro collegato a un ingresso di tensione analogico.
Corrente di carico consentita 20 mA o inferiore
O Velocità di riferimento ingresso di tensione analogico/Polarizzazione di coppia (cella di carico)
Ingresso di tensione 0… 10 V. Per la velocità di riferimento o la polarizzazione di coppia (compensazione cella di carico)
Impedenza di ingresso: 10 kΩ Intervallo della tensione di ingresso c.c.: 0,3… ±12 V
O2 Velocità di riferimento ingresso di tensione analogico/Polarizzazione di coppia (cella di carico)
Ingresso di tensione ±10 Vc.c. Per la velocità di riferimento, il limite di coppia o la polarizzazione di coppia (compensazione cella di carico)
Impedenza di ingresso: 10 kΩ Intervallo della tensione di ingresso c.c.: 0… ±12 V
OI Velocità di riferimento ingresso di corrente analogico/Polarizzazione di coppia (cella di carico)
Ingresso di corrente 0… 20 mA c.c. (4… 20 mA c.c.). Per la velocità di riferimento o la polarizzazione di coppia (compensazione cella di carico)
Impedenza di ingresso: Ingresso di corrente massimo 100 Ω 24 mA
AM Uscita di tensione analogica
Uscita di tensione 0… 10 V. Utilizzata per monitorare le grandezze dell'inverter.
Carico massimo 2 mA
AMI Uscita di corrente analogica
Uscita di corrente 0… 20 mA c.c. (4… 20 mA c.c.).
Impedenza di carico consentita inferiore a 250 Ω
TH Terminale di ingresso termistore esterno
Quando è collegato un termistore esterno (di tipo PTC o NTC, selezionabile da b098) e la resistenza calcolata riflette un livello di temperatura anormale, l'inverter si bloccherà (se abilitato). Il termistore è collegato tra TH e CM1. Alimentazione elettrica termistore: 100 mW o superiore. Impedenza predefinita per allarme temperatura 3 kΩ (ma è possibile regolare il livello per l'allarme temperatura tra 0 e 9.999 Ω tramite b099).
Intervallo della tensione di ingresso consentita: 0… 8 Vc.c.:Circuito di ingresso:
Dig
itale
FM Monitoraggio tensione digitale
L'uscita digitale 0-10 V funzionante da uscita PWM (controllo duty-cycle) per la maggior parte dei monitoraggi degli inverter, ad eccezione di C027=03 (Frequenza di uscita digitale), diventa l'uscita di frequenza.
Corrente in uscita massima di 1,2 mA. La frequenza massima è 3,6 kHz.
Alimentazione
P24 Terminali di alimentazione da +24 Vc.c. per gli ingressi digitali
Alimentazione da 24 Vc.c. per gli ingressi digitali. Quando è selezionata la logica PNP, diventa il punto comune degli ingressi.
Corrente in uscita massima consentita 100 mA.
CM1 Terminale da 0 V per alimentazione degli ingressi digitali
Terminale da 0 V per terminale di alimentazione da 24 Vc.c. (P24), terminale di ingresso termistore (TH) e terminale FM. Quando è selezionata la logica NPN, diventa il punto comune degli ingressi. Nota: non collegare alla messa a terra.
8 Vc.c.
10 kΩ
1 kΩ
CM1
TH
Termistore

14
Cablaggio di controllo Sezione 2-3
2-3-1 Collegamento terminali a molla
Dig
itale
Ingr
esso
di
cont
atto
1234567GS1 GS2
Terminale di ingresso multifunzione
È possibile assegnare uno qualsiasi degli ingressi multifunzione digitali a questi terminali.Quando gli ingressi di sicurezza GS1 e GS2 sono abilitati tramite il DIP switch SW1 hardware, le impostazioni multifunzione 78: GS1 e 79: GS2 sono obbligatorie.Quando gli ingressi di sicurezza non sono abilitati, è possibile utilizzare GS1 e GS2 come ingressi multifunzione standard.
Tensione di attivazione minima: 18 Vc.c.
Impedenza di ingresso tra PLC e ingresso: 4,7 kΩ
Tensione di attivazione massima: 27 Vc.c.
Carico ingresso:5,6 mA a 27 Vc.c.
PLC Comune ingressi digitali Questo terminale viene utilizzato come terminale comune degli ingressi digitali. Per alimentazione interna (e contatti senza tensione): Cortocircuito tra P24 e PLC: Logica NPN (la corrente fluirà dall'ingresso LX all'uscita) Cortocircuito tra CM1 e PLC: Logica PNP (la corrente fluirà dall'uscita all'ingresso LX)
Usc
ita d
ico
ntat
to
11a11c
Terminale di uscita multifunzione
È possibile impostare qualsiasi segnale di uscita multifunzione su questi terminali
Capacità contatto relè massima:250 Vc.a. 5 A (carico resistenza) 250 Vc.a. 1 A (carico induttivo) 30 Vc.c. 5 A (carico resistenza) 30 Vc.c. 1 A (carico induttivo)Capacità contatto relè minima:1 Vc.c. 1 mA
12a12c13a13c
AL0 AL1 AL2
Capacità contatto relè massima:AL1-AL0:250 Vc.a. 2 A (carico resistenza) 250 Vc.a. 0,2 A (carico induttivo)AL2-AL0:250 Vc.a. 1 A (carico resistenza) 250 Vc.a. 0,2 A (carico induttivo)Punto minimo di capacità di contatto:100 Vc.a. 10 mA5 Vc.c. 100 mA
Tipo Nome Scopo Dettagli Caratteristiche elettriche
2,5 mm
Per rilasciare il cavo, premere la linguetta arancione con un cacciavite piccolo e rimuovere il cavo.
Per collegare il cavo, è sufficiente premere il terminale in posizione.

15
Cablaggio di controllo Sezione 2-3
2-3-2 Funzione di disattivazione dell'arresto di sicurezzaL'inverter 3G3LX incorpora una funzione ARRESTO DI SICUREZZA. Sononecessari 2 ingressi ridondanti (GS1/GS2).La funzione è basata esclusivamente su hardware; tuttavia, per poterlagestire in modo corretto dal software, è necessario correggere le impostazionidei terminali multifunzione su GS1 (C008=78:GS1) e GS2 (C009=79:GS2).Tale funzione non può essere impostata su altri terminali multifunzione.È possibile disattivare la funzione ARRESTO DI SICUREZZA per utilizzare gliingressi per altri scopi.Per abilitare le funzioni di sicurezza, accertarsi che SW1 = ON (impostazionedi fabbrica). Per modificare l'interruttore, è necessario rimuovere la morsettiera(vedere diagramma). Quando SW1 = OFF, gli ingressi vengono utilizzaticome ingressi multifunzione standard; in questi casi, qualsiasi impostazionemultifunzione risulta valida per C008 e C009. L'accesso a SW1 risultacomplicato al fine di ridurre al minimo la possibilità di modifiche non previste.
2-3-3 Impostazioni NPN/PNP ingressi digitali
ON
Selettore a scorrimento SW 1
OFF ON Impostazione di fabbrica: ON
(sicurezza abilitata)
Alimentazione interna NPN(per uscite NPN)
Alimentazione esterna NPN(per uscite NPN)
Alimentazione interna PNP(per uscite PNP)
Alimentazione esterna PNP(per uscite PNP)
24 Vc.c.
InverterModulo di uscita
Cortocircuito
S
COM
P24
PLCCM 1
GS 1
8
Inverter
24 Vc.c.P24
PLC
CM 1
GS 1
24 Vc.c.
S
COM
Modulo di uscita
8
24 Vc.c.
InverterModulo di uscita
S
COM P24
PLC
CM 1
GS 1
8
Cortocircuito
InverterModulo di uscita
24 Vc.c.24 Vc.c.
COM
S
P24PLC
CM 1
GS 1
8

16
Schede opzionali Sezione 2-4
2-4 Schede opzionali
installazione delle schede opzionali:
Tipo di scheda Modello Caratteristiche
Retroazione dell'encoder
3G3AX-PG01 • Encoder incrementale line driver da 5 V (A/B/Z)• Per un ingresso encoder
3G3AX-ABS30Ottimizzato per motori senza riduttore e 3G3AX-ABSPer tutti gli usi standard
Corrisponde ai seguenti tre tipi di encoder.1) HIPERFACE2) EnDat2.1/2.23) Encoder incrementale (aspetto A/B/Z)• Per due ingressi encoderÈ disponibile una versione ottimizzata per l'immunità da rumori forti in caso di utilizzo con motori di tipo senza riduttore (generalmente motori PM)
Scheda I/O di espansione
3G3AX-EIO 5 ingressi digitali (collettore aperto)1 uscita digitale (collettore aperto)2 uscite a relè
Slot opzionale 1
Morsettiera
Scheda
Slot opzionale 2
Pin di supporto
Viti di fissaggio (M3)
17
Schede opzionali Sezione 2-4
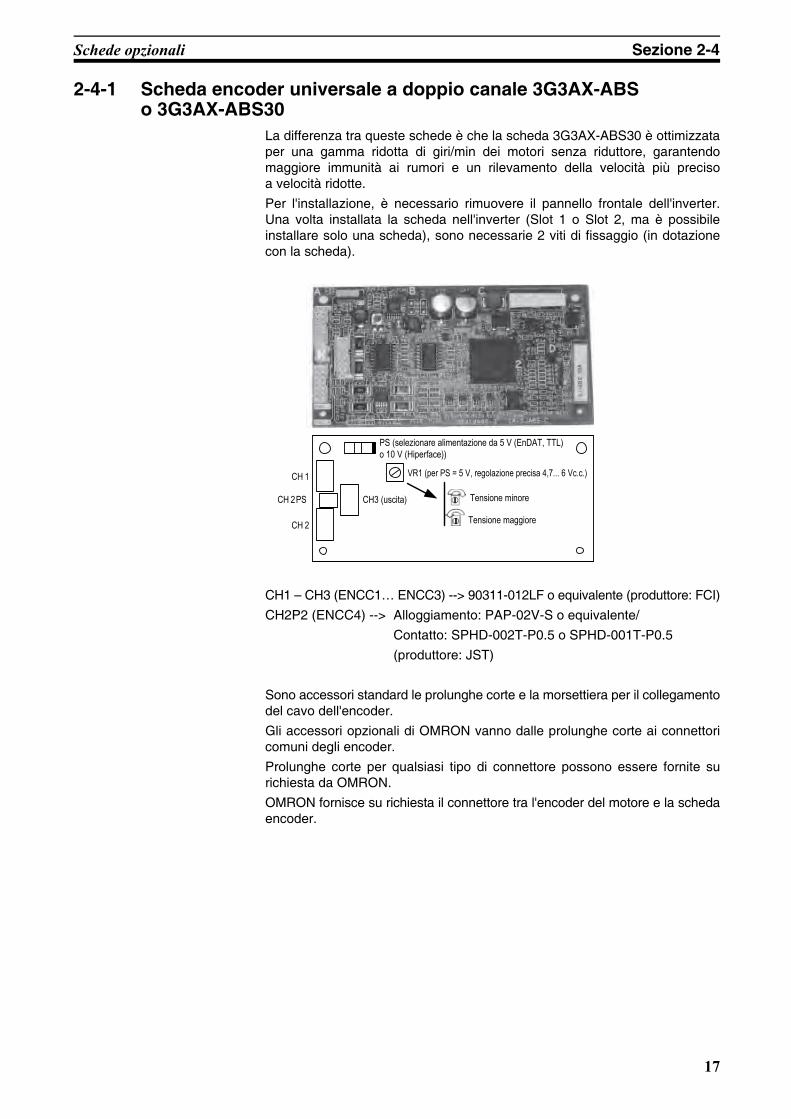
2-4-1 Scheda encoder universale a doppio canale 3G3AX-ABS o 3G3AX-ABS30
La differenza tra queste schede è che la scheda 3G3AX-ABS30 è ottimizzataper una gamma ridotta di giri/min dei motori senza riduttore, garantendomaggiore immunità ai rumori e un rilevamento della velocità più precisoa velocità ridotte.Per l'installazione, è necessario rimuovere il pannello frontale dell'inverter.Una volta installata la scheda nell'inverter (Slot 1 o Slot 2, ma è possibileinstallare solo una scheda), sono necessarie 2 viti di fissaggio (in dotazionecon la scheda).
CH1 – CH3 (ENCC1… ENCC3) --> 90311-012LF o equivalente (produttore: FCI)CH2P2 (ENCC4) --> Alloggiamento: PAP-02V-S o equivalente/
Contatto: SPHD-002T-P0.5 o SPHD-001T-P0.5 (produttore: JST)
Sono accessori standard le prolunghe corte e la morsettiera per il collegamentodel cavo dell'encoder.Gli accessori opzionali di OMRON vanno dalle prolunghe corte ai connettoricomuni degli encoder.Prolunghe corte per qualsiasi tipo di connettore possono essere fornite surichiesta da OMRON.OMRON fornisce su richiesta il connettore tra l'encoder del motore e la schedaencoder.
PS (selezionare alimentazione da 5 V (EnDAT, TTL) o 10 V (Hiperface))
CH3 (uscita)
CH 1
CH 2
CH 2PS
VR1 (per PS = 5 V, regolazione precisa 4,7... 6 Vc.c.)
Tensione minore
Tensione maggiore
18
Schede opzionali Sezione 2-4
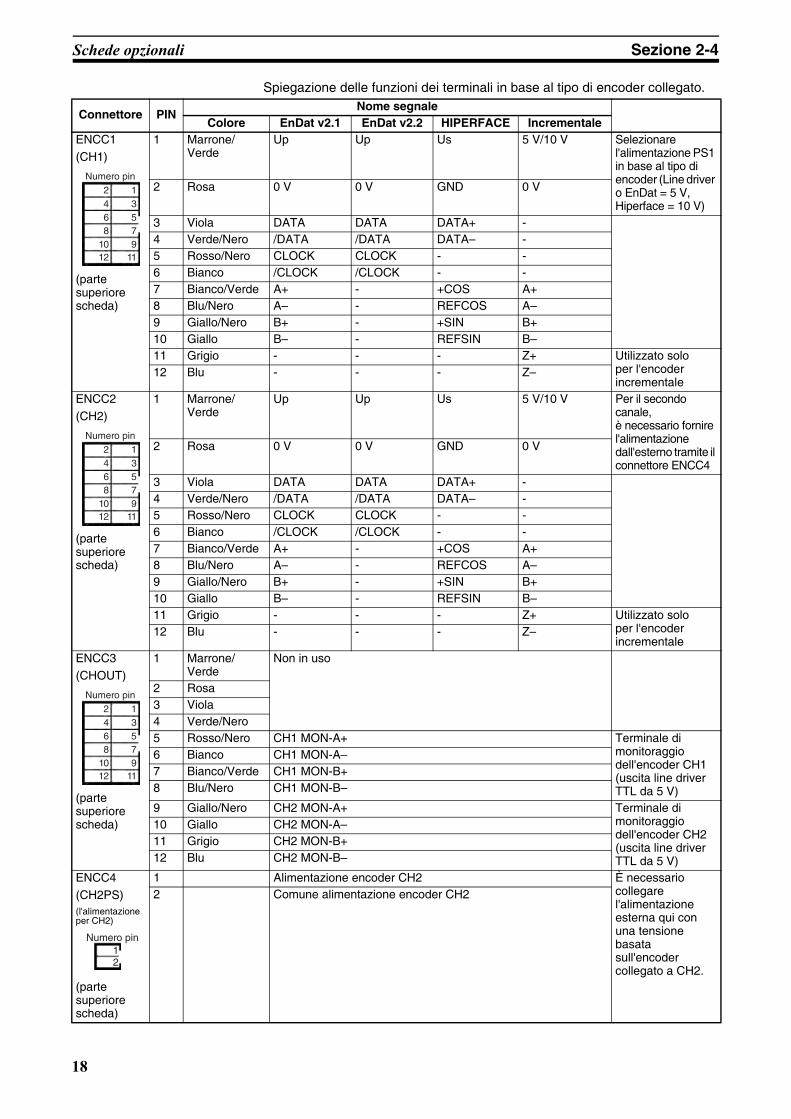
Spiegazione delle funzioni dei terminali in base al tipo di encoder collegato.
Connettore PINNome segnale
Colore EnDat v2.1 EnDat v2.2 HIPERFACE IncrementaleENCC1(CH1)
(parte superiore scheda)
1 Marrone/Verde
Up Up Us 5 V/10 V Selezionare l'alimentazione PS1 in base al tipo di encoder (Line driver o EnDat = 5 V, Hiperface = 10 V)
2 Rosa 0 V 0 V GND 0 V
3 Viola DATA DATA DATA+ -4 Verde/Nero /DATA /DATA DATA– -5 Rosso/Nero CLOCK CLOCK - -6 Bianco /CLOCK /CLOCK - -7 Bianco/Verde A+ - +COS A+8 Blu/Nero A– - REFCOS A–9 Giallo/Nero B+ - +SIN B+10 Giallo B– - REFSIN B–11 Grigio - - - Z+ Utilizzato solo
per l'encoder incrementale
12 Blu - - - Z–
ENCC2(CH2)
(parte superiore scheda)
1 Marrone/Verde
Up Up Us 5 V/10 V Per il secondo canale, è necessario fornire l'alimentazione dall'esterno tramite il connettore ENCC4
2 Rosa 0 V 0 V GND 0 V
3 Viola DATA DATA DATA+ -4 Verde/Nero /DATA /DATA DATA– -5 Rosso/Nero CLOCK CLOCK - -6 Bianco /CLOCK /CLOCK - -7 Bianco/Verde A+ - +COS A+8 Blu/Nero A– - REFCOS A–9 Giallo/Nero B+ - +SIN B+10 Giallo B– - REFSIN B–11 Grigio - - - Z+ Utilizzato solo
per l'encoder incrementale
12 Blu - - - Z–
ENCC3(CHOUT)
(parte superiore scheda)
1 Marrone/Verde
Non in uso
2 Rosa3 Viola4 Verde/Nero5 Rosso/Nero CH1 MON-A+ Terminale di
monitoraggio dell'encoder CH1 (uscita line driver TTL da 5 V)
6 Bianco CH1 MON-A–7 Bianco/Verde CH1 MON-B+8 Blu/Nero CH1 MON-B–
9 Giallo/Nero CH2 MON-A+ Terminale di monitoraggio dell'encoder CH2 (uscita line driver TTL da 5 V)
10 Giallo CH2 MON-A–11 Grigio CH2 MON-B+12 Blu CH2 MON-B–
ENCC4(CH2PS)(l'alimentazione per CH2)
(parte superiore scheda)
1 Alimentazione encoder CH2 È necessario collegare l'alimentazione esterna qui con una tensione basata sull'encoder collegato a CH2.
2 Comune alimentazione encoder CH2
Numero pin
1
3
2
4
56
78
910
1112
Numero pin
1
3
2
4
56
78
910
1112
Numero pin
1
3
2
4
56
78
910
1112
Numero pin
12
19
Schede opzionali Sezione 2-4
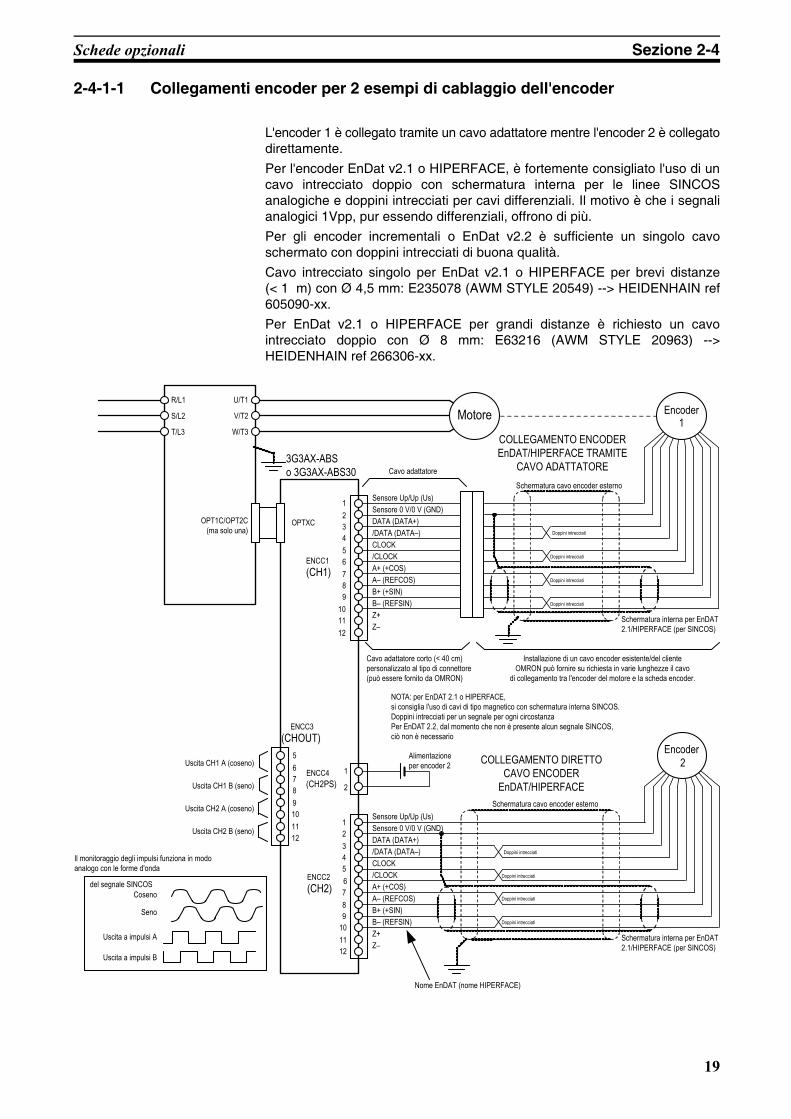
2-4-1-1 Collegamenti encoder per 2 esempi di cablaggio dell'encoder
L'encoder 1 è collegato tramite un cavo adattatore mentre l'encoder 2 è collegatodirettamente.Per l'encoder EnDat v2.1 o HIPERFACE, è fortemente consigliato l'uso di uncavo intrecciato doppio con schermatura interna per le linee SINCOSanalogiche e doppini intrecciati per cavi differenziali. Il motivo è che i segnalianalogici 1Vpp, pur essendo differenziali, offrono di più.Per gli encoder incrementali o EnDat v2.2 è sufficiente un singolo cavoschermato con doppini intrecciati di buona qualità.Cavo intrecciato singolo per EnDat v2.1 o HIPERFACE per brevi distanze(< 1 m) con Ø 4,5 mm: E235078 (AWM STYLE 20549) --> HEIDENHAIN ref605090-xx.Per EnDat v2.1 o HIPERFACE per grandi distanze è richiesto un cavointrecciato doppio con Ø 8 mm: E63216 (AWM STYLE 20963) -->HEIDENHAIN ref 266306-xx.
1234
Encoder
ENCC1(CH1)
ENCC4(CH2PS)
ENCC2(CH2)
ENCC3(CHOUT)
56789
101112
1
2
Motore
OPTXC
123456789
101112
56789101112
Coseno
Seno
Uscita a impulsi A
Il monitoraggio degli impulsi funziona in modo analogo con le forme d'onda
del segnale SINCOS
Uscita a impulsi B
Encoder 2
1
Nome EnDAT (nome HIPERFACE)
Doppini intrecciati
Doppini intrecciati
Doppini intrecciati
Doppini intrecciati
Schermatura cavo encoder esterno
Schermatura cavo encoder esterno
Doppini intrecciati
Doppini intrecciati
Doppini intrecciati
Doppini intrecciati
Cavo adattatore
COLLEGAMENTO ENCODER EnDAT/HIPERFACE TRAMITE
CAVO ADATTATORE
Sensore Up/Up (Us)Sensore 0 V/0 V (GND)DATA (DATA+)/DATA (DATA–)CLOCK/CLOCKA+ (+COS)A– (REFCOS)B+ (+SIN)B– (REFSIN)Z+Z–
Sensore Up/Up (Us)Sensore 0 V/0 V (GND)DATA (DATA+)/DATA (DATA–)CLOCK/CLOCKA+ (+COS)A– (REFCOS)B+ (+SIN)B– (REFSIN)Z+Z–
Schermatura interna per EnDAT 2.1/HIPERFACE (per SINCOS)
Schermatura interna per EnDAT 2.1/HIPERFACE (per SINCOS)
Cavo adattatore corto (< 40 cm) personalizzato al tipo di connettore (può essere fornito da OMRON)
Installazione di un cavo encoder esistente/del cliente OMRON può fornire su richiesta in varie lunghezze il cavo
di collegamento tra l'encoder del motore e la scheda encoder.
NOTA: per EnDAT 2.1 o HIPERFACE, si consiglia l'uso di cavi di tipo magnetico con schermatura interna SINCOS.Doppini intrecciati per un segnale per ogni circostanza Per EnDAT 2.2, dal momento che non è presente alcun segnale SINCOS, ciò non è necessario
COLLEGAMENTO DIRETTO CAVO ENCODER
EnDAT/HIPERFACE
Alimentazione per encoder 2
3G3AX-ABS o 3G3AX-ABS30
R/L1
S/L2
T/L3
U/T1
V/T2
W/T3
OPT1C/OPT2C (ma solo una)
Uscita CH1 A (coseno)
Uscita CH1 B (seno)
Uscita CH2 A (coseno)
Uscita CH2 B (seno)
20
Schede opzionali Sezione 2-4
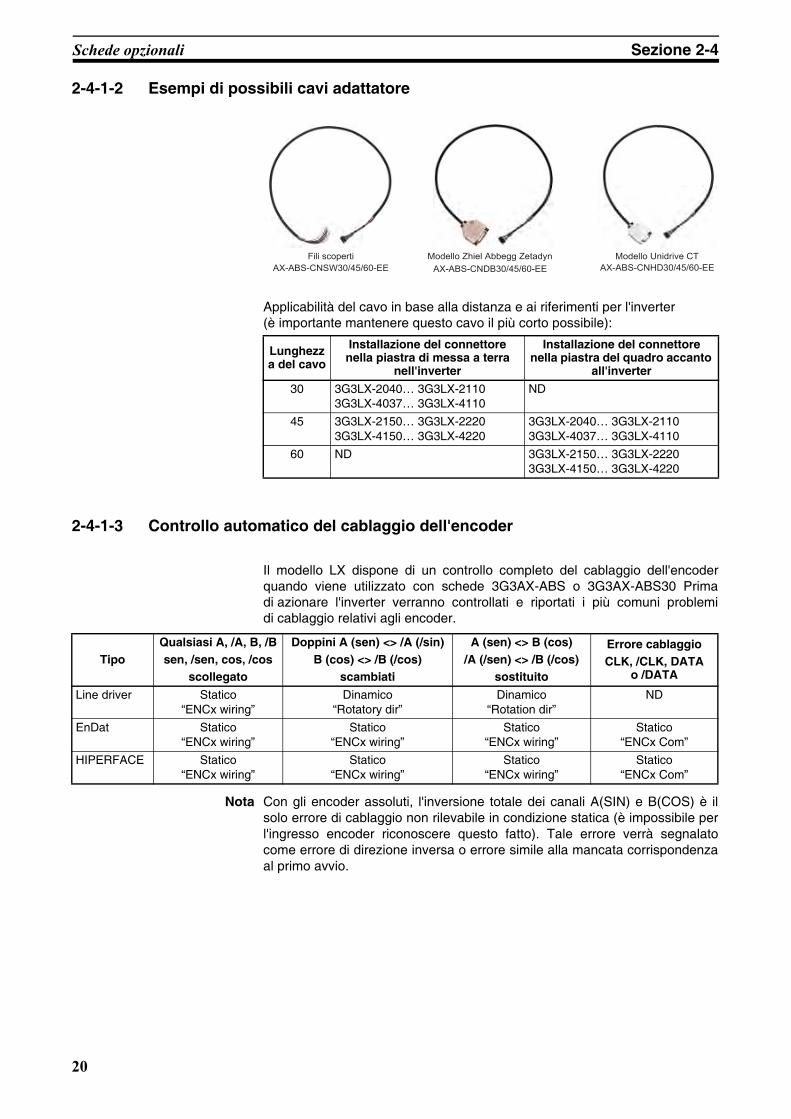
2-4-1-2 Esempi di possibili cavi adattatore
Applicabilità del cavo in base alla distanza e ai riferimenti per l'inverter(è importante mantenere questo cavo il più corto possibile):
2-4-1-3 Controllo automatico del cablaggio dell'encoder
Il modello LX dispone di un controllo completo del cablaggio dell'encoderquando viene utilizzato con schede 3G3AX-ABS o 3G3AX-ABS30 Primadi azionare l'inverter verranno controllati e riportati i più comuni problemidi cablaggio relativi agli encoder.
Nota Con gli encoder assoluti, l'inversione totale dei canali A(SIN) e B(COS) è ilsolo errore di cablaggio non rilevabile in condizione statica (è impossibile perl'ingresso encoder riconoscere questo fatto). Tale errore verrà segnalatocome errore di direzione inversa o errore simile alla mancata corrispondenzaal primo avvio.
Lunghezza del cavo
Installazione del connettore nella piastra di messa a terra
nell'inverter
Installazione del connettore nella piastra del quadro accanto
all'inverter30 3G3LX-2040… 3G3LX-2110
3G3LX-4037… 3G3LX-4110ND
45 3G3LX-2150… 3G3LX-22203G3LX-4150… 3G3LX-4220
3G3LX-2040… 3G3LX-21103G3LX-4037… 3G3LX-4110
60 ND 3G3LX-2150… 3G3LX-22203G3LX-4150… 3G3LX-4220
Fili scoperti Modello Zhiel Abbegg Zetadyn Modello Unidrive CT AX-ABS-CNSW30/45/60-EE AX-ABS-CNDB30/45/60-EE AX-ABS-CNHD30/45/60-EE
TipoQualsiasi A, /A, B, /Bsen, /sen, cos, /cos
scollegato
Doppini A (sen) <> /A (/sin)B (cos) <> /B (/cos)
scambiati
A (sen) <> B (cos)/A (/sen) <> /B (/cos)
sostituito
Errore cablaggio CLK, /CLK, DATA
o /DATA
Line driver Statico“ENCx wiring”
Dinamico“Rotatory dir”
Dinamico“Rotation dir”
ND
EnDat Statico“ENCx wiring”
Statico“ENCx wiring”
Statico“ENCx wiring”
Statico“ENCx Com”
HIPERFACE Statico“ENCx wiring”
Statico“ENCx wiring”
Statico“ENCx wiring”
Statico“ENCx Com”

21
Schede opzionali Sezione 2-4
2-4-2 Scheda encoder universale a un solo canale line driver 3G3AX-PG01
Nota Il terminale TM2 è riservato all'uso con l'inverter RX.
Impostazioni DIP switch
Nota Il DIP switch SWR è riservato all'uso con l'inverter RX.
Esempio di schema di cablaggio
Nome terminale Funzione terminale Funzione Caratteristiche
elettricheEP5 (+5 Vc.c.)EG5 (GND)
Ingresso alimentazione encoder
Alimentazione per l'encoder
+/– 5 Vc.c., 150 mA max
EAP, EAN, EBP, EBN, EZP, EZN
Ingressi segnale encoder
A, B, Z: ingresso segnale encoder rotativo
Ingresso encoder line driver (basato sullo standard RS-422)
Terminale TM1 EP5 EG5 EAP EAN EBP EBN EZP EZN
Non utilizzato con LX
Non utilizzato con LXDip switch SWENC
Collegamento encoder TM1
Connettore per il collegamento al corpo principale
DIP switch
N. inter-ruttore Sommario
SWENC1
ON Rilevamento segnale A o B scollegato(EAP-EAN o EBP-EBN) abilitato
OFF Rilevamento segnale A o B scollegato(EAP-EAN o EBP-EBN) disabilitato
2ON Rilevamento segnale Z scollegato (EZP-EZN) abilitatoOFF Rilevamento segnale Z scollegato (EZP-EZN) disabilitato
EP 5EG 5
Encoder
TM 1EAPEANEBPEBNEZPEZN
MotoreR /L1
S/ L2
T /L 3
U /T 1
V/T 2
W /T 3
B–B+A–A+0 V+5 Vc.c.
Z+Z–
Schermatura cavo encoder
Doppini intrecciati
Doppini intrecciati
Doppini intrecciati
Collegamento schermatura alla messa a terra
3G 3AX -PG 01
OPT1C/OPT2C(ma solo uno)

22
Schede opzionali Sezione 2-4
2-4-3 Scheda I/O di espansione 3G3AX-EIO
Descrizione terminali:
Tipo di scheda Modello Caratteristiche
Scheda I/O di espansione 3G3AX-EIO
5 ingressi digitali (collettore aperto) 1 uscita digitale (collettore aperto) 2 uscite a relè
Supporto terminale Nome terminale Nome
segnale Descrizione Caratteristiche
OTM1 Alimentazione P24 Si tratta dell'alimentazione da 24 Vc.c. per gli ingressi digitali. Diventa il terminale comune per la logica sorgente (general. PNP)
Carico massimo:100 mA
Alimentazione CM3 Terminale comune per l'alimentazione di alimentazione P24 Diventa il terminale comune per la logica dissipatore (general. NPN)
Terminale di ingresso multifunzione
EX1EX2EX3EX4EX5
Ingressi multifunzione disponibili come per i terminali di ingresso standard degli inverter
Caratteristiche elettriche per Ingresso – EPCCondizione di attivazione minima:c.c., 18 Vc.c.Impedenza di ingresso:4,7 kΩTensione massima:c.c., 27 Vc.c.Corrente di carico max.:circa 5,6 mA con un'alimentazione c.c. da 27 Vc.c.
Comune terminali di ingresso multifunzione
EPC Logica NPN: P24-EPCLogica PNP: CM3-EPC
Uscita a collettore aperto
23 Uscite multifunzione disponibili come per i terminali di uscita standard degli inverter
Caduta di tensione all'attivazione:4 Vc.c. o inferioreTensione massima:27 Vc.c.Corrente massima:50 mA
Comune terminale di uscita
CM4 Terminale comune per l'uscita a collettore aperto.
OTM2 Uscite a relè 21A21C
Uscite multifunzione disponibili come per i terminali di uscita standard degli inverter.
5 A 250 Vc.a.5 A 30 Vc.c.
OTM3 22A22C

23
Piastre di messa a terra Sezione 2-5
2-5 Piastre di messa a terra
Sono disponibili piastre di messa a terra accessorie per facilitare la disposizionedei cavi e le messa a terra della schermatura.
EX1
P24EPCCM3
EX2EX3EX4EX5
21A21C22A22C
23
CM4
SJ-EIO
OPTXC OPT1C/OPT2C
3G3LX
MotoreR (L1)S (L2)T (L3)
U (T1)V (T2)
W (T3)
Piastra di messa a terra LX/RX, dimensione 1 (3,7 kW)

24
Piastre di messa a terra Sezione 2-5
Piastra di messa a terra LX/RX, dimensione 2 (4 kW… 11 kW)
Piastra di messa a terra LX/RX, dimensione 3 (15 kW… 22 kW)

25
SEZIONE 3Programmazione dell'inverter LX
3-1 Utilizzo del display LCD
Il display LCD nell'inverter LX è progettato per semplificare la modificae l'accesso ai parametri.
Nome SommarioSpia di alimentazione
Accesa (verde) quando l'inverter presenta un'alimentazione di controllo.
Spia RUN Accesa (verde) quando l'inverter aziona il motore.Spia di avvertenza Accesa (rossa) quando è presente un'avvertenza
nell'inverter.Spia di allarme Accesa (rossa) quando si riscontra un errore nell'inverter.Display LCD Vengono visualizzati monitoraggi, parametri e messaggi
di errore. La retroilluminazione appare rossa in caso di errore o allarme dell'inverter.
Spia OPE Accesa (verde) quando i tasti della console di programmazione diventano attivi (tramite la selezione della sorgente RUN o tramite il processo di autotuning). Premendo per 3 s o più il tasto LOCAL/REMOTE, diventa anche un controllo per il funzionamento della console di programmazione.
Spia tasto Run attivo
Accesa (verde) quando i tasti FWD RUN/REV sono attivi.
Tasti funzione Tasti funzione COPY e di navigazione. Verificare le descrizioni aggiuntive.
Spia RUN Spia di avvertenzaSpia di allarme
Display LCD
Spia OPE
Spia tasto Run attivo
Tasti funzione
Spia di alimentazione
HITACHI

26
Utilizzo del display LCD Sezione 3-1
3-1-1 Stato barra superiore (permanente)
3-1-2 Impostazioni LCDPer immettere la modifica delle impostazioni dell'LCD, premerecontemporaneamente + + . Verrà visualizzato il menu OPTIONMODE (si tratta di un menu situato all'interno della console di programmazionecon display LCD e non nell'inverter).
Qui, è possibile impostare le seguenti regolazioni per il display LCD:
Elemento Contenuto del display Sommario
Modalità di visualizzazione MONITOR-A Modalità di monitoraggio AMONITOR-B Modalità di monitoraggio BFUNCTION Modalità di funzioneTRIP Errore (modalità errore)WARNING Modalità di avvertenzaOPTION Modalità configurazione LCD
Motore selezionato M1 Motore 1 (multifunzione SET = OFF)M2 Motore 2 (multifunzione SET = ON)
Stato RUN dell'inverter STOP Arresto in corsoFWD [Quindi] viene azionata
la marcia avantiREV Viene avviata l'inversione
Selezione visualizzazione ALL Visualizzazione globaleUTL Singola visualizzazione delle funzioniUSR Visualizzazione impostazione utenteCMP Visualizzazione di confronto
Elemento SommarioLanguage 1-Inglese, 2-Tedesco, 3-Francese, 4-Spagnolo,
5-Italiano, 6-Portoghese, 7-Giapponese, 8-Cinese, 9-Turco, 10-Russo
Date and Time Vengono impostate la data e l'ora Viene selezionato qui anche il formato di visualizzazione
Read Lock Lettura dati non consentita sul lato della console di programmazione
INV Type select Non modificareREAD/WRITE COPY mode
Consente di selezionare la capacità della funzione di copia: “4 parameter sets” o “1 parameter set + Drive Programming”
Backlight Auto-Off Selezionabile se la retroilluminazione lampeggia in rosso in caso di allarme dell'inverter
Operator Reset Non utilizzareTest Mode Non utilizzare

27
Utilizzo del display LCD Sezione 3-1
3-1-3 Modalità di visualizzazione
Le diverse modalità di visualizzazione vengono selezionate dal livello di accessoprincipale tramite i tasti e .
3-1-3-1 Monitor-A: 1 monitor, 1 parametro
In MONITOR-A, è possibile selezionare un monitor e modificare 1 parametro.
Per modificare il parametro del monitor selezionato:
Per modificare il parametro:
Per cambiare il parametro da modificare:
Per modificare il monitor predefinito all'avvio, modificare il parametro F012.
MONITOR-A M1-STOP ALLd001 Out.Speed
0.00HzF001 2.00Hz
MONITOR-B M1-STOP ALL
Output.Speed 0.00Hz
In.TM HHLLLLLLL
Out.Crnt 0.00A
Rotation STOP
FUNCTION M1-STOP ALL
F001
[0.00 - 50.00]
SetSpeed(Crawl)
2.00Hz
TRIP M1-STOP ALLE97.1
270111 16:31 Stop
RUN Request
MONITOR-A M1-STOP ALLd029 Pos-Ref
+0
F001 2.00Hz
MONITOR-A M1-STOP ALLd002 Out.Speed
0.00Hz
F001 2.00Hz
1
MONITOR-A M1-STOP ALLd001 Out.Speed
0.00HzF001 2.00Hz
per selezionare il monitor, quindi
MONITOR-A M1-STOP ALLd001 Out.Speed
0.00Hz
F003 0005 . 8s
MONITOR-A M1-STOP ALLd001 Out.Speed
0.00HzF001 2.00Hz
5 per modificare il parametro, quindi
MONITOR-A M1-STOP ALLd001 Out.Speed
0.00Hz
F001 1.80s3
MONITOR-A M1-STOP ALLd001 Out.Speed
0.00HzF001 2.00Hz
per selezionare il parametro, quindi

28
Utilizzo del display LCD Sezione 3-1
3-1-3-2 Monitor-B: Modalità a 4 monitor
In MONITOR-B, è possibile selezionare fino a 4 monitor su uno schermo.In questa modalità, una volta effettuata, la selezione a 4 monitor rimarràinvariata dopo lo spegnimento.
MONITOR-B M1-STOP ALL
Out.Speed 0.00Hz
In.TM HHLLLLLLL
Out.Crnt 0.00A
Rotation STOP
MONITOR-B M1-STOP ALL
Out.Speed 0.00Hz
In.TM HHLLLLLLL
Out.Crnt 0.00A
Rotation STOP
per selezionare uno dei 4 monitorMONITOR-B M1-STOP ALL
Out.Speed 0.00Hz
In.TM HHLLLLLLL
Out.Crnt 0.00A
Rotation STOP
MONITOR-B M1-STOP ALL
d003 Rotation3
per selezionare il monitor, quindiMONITOR-B M1-STOP ALL
d006 Out.TM6
per correggerlo.MONITOR-B M1-STOP ALL
Out.Speed 0.00Hz
In.TM HHLLLLLLL
Out.Crnt 0.00A
Out.TM LHLL

29
Utilizzo del display LCD Sezione 3-1
3-1-3-3 Funzione: modifica di 1 parametro
In questa modalità, vengono visualizzate tutte le informazioni disponibilisul parametro.Per selezionare il parametro da modificare:FUNCTION M1-STOP ALL
F001
[0.00 - 50.00]
SetSpeed(Crawl)
2.00Hz
FUNCTION M1-STOP ALL
F001
[0.00 - 50.00]
SetSpeed(Crawl)
2.00Hz
1
per selezionare il parametroFUNCTION M1-STOP ALL
A044
[00 - 06]
Control mode, 1st
00:IM-VC
4
per selezionare il parametro da modificareFUNCTION M1-STOP ALL
A044
[00 - 06]
Control mode, 1st
00:IM-VC0
SUGGERIMENTO: per visualizzare il valore predefinito del parametro,
premere contemporaneamente e in questa modalità.
FUNCTION M1-STOP ALL
A044
[00 - 06]
Control mode, 1st
06:PM-CLV6
per correggere il valore.

30
Utilizzo del display LCD Sezione 3-1
3-1-3-4 TRIP/WARNING e TRIP/HISTORY
In questa modalità, vengono visualizzate le informazioni relative a un'erroredell'inverter.Dal momento che il display LCD dispone della funzione Orologio in temporeale, la cronologia degli errori comprende la data e l'ora dell'occorrenza perciascuna degli ultimi 6 errori. Lo schermo principale mostra l'occorrenza degliultimi errori, inclusi l'ora e il momento preciso del funzionamento dell'inverterin cui si è verificato (arresto, accelerazione, marcia, decelerazione).
TRIP M1-STOP ALLE97.1
100723 14:55 Stop
RUN Request
TRIP M1-STOP ALL
ERR1 RUN Request
Out.Crnt 0.00A
100727 19:22 Stop
Out.Speed 0.00Hz
TRIP M1-STOP ALL
ERR2 FB-Opt.Ans.
Out.Crnt 0.00A
100724 10:38 Stop
Out.Speed 0.00Hz
TRIP M1-STOP ALL
ERR6
(no data)
WARNING M1-STOP ALL
(no data)
Dalla schermata TRIP principale,
premere per accedere alla modalità dettagliata
Da qui per visualizzare la cronologia degli errori
Se alcuni errori non contengono informazioni, viene visualizzata una pagina vuota.
Una volta visualizzate tutte le schermate relative a TRIP, viene visualizzato lo stato WARNING:
Premere in un errore per saperne di più:
TRIP M1-STOP ALL
ERR1 RUN Request
Out.Crnt 0.00A
100727 19:22 Stop
Out.Speed 0.00Hz
TRIP M1-STOP ALL
ERR1 RUN Request
ON time 25hr
DC Voltage 287.5Vdc
RUN time 10hr
TRIP M1-STOP ALL
ERR1 RUN Request
Out.Crnt 0.00A
100727 19:22 Stop
Out.Speed 0.00Hz
31
Utilizzo del display LCD Sezione 3-1
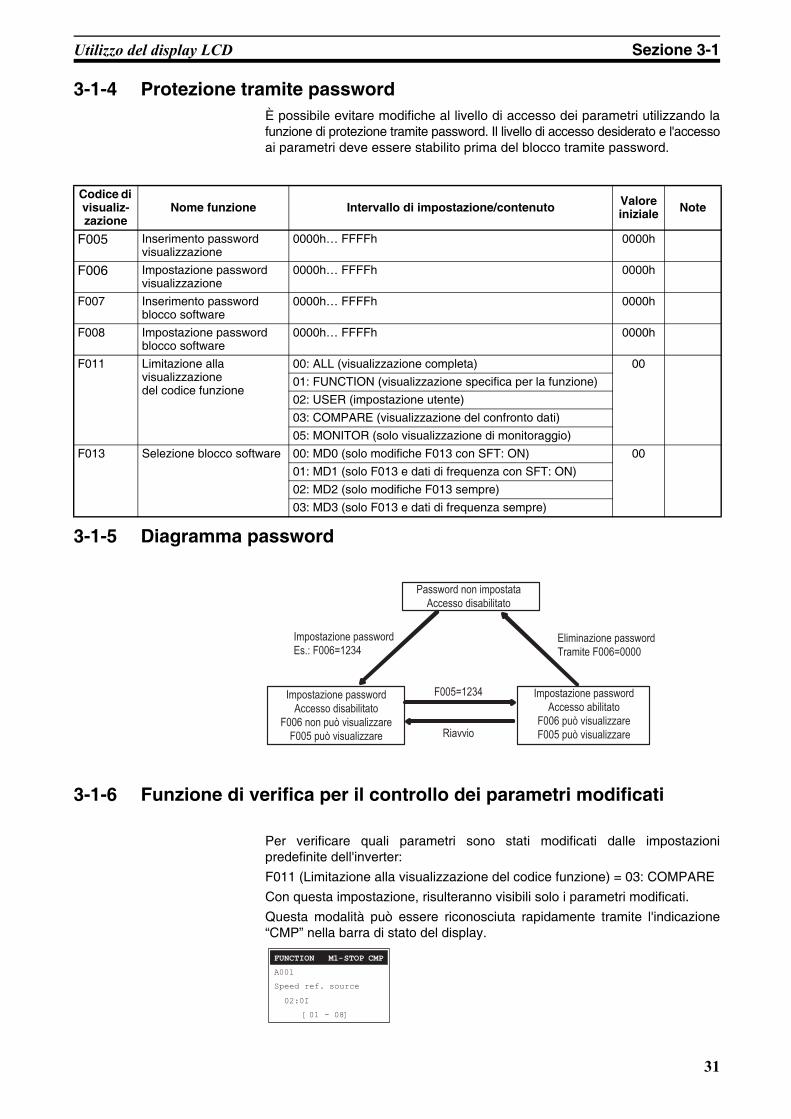
3-1-4 Protezione tramite passwordÈ possibile evitare modifiche al livello di accesso dei parametri utilizzando lafunzione di protezione tramite password. Il livello di accesso desiderato e l'accessoai parametri deve essere stabilito prima del blocco tramite password.
3-1-5 Diagramma password
3-1-6 Funzione di verifica per il controllo dei parametri modificati
Per verificare quali parametri sono stati modificati dalle impostazionipredefinite dell'inverter: F011 (Limitazione alla visualizzazione del codice funzione) = 03: COMPARECon questa impostazione, risulteranno visibili solo i parametri modificati.Questa modalità può essere riconosciuta rapidamente tramite l'indicazione“CMP” nella barra di stato del display.
Codice di visualiz-zazione
Nome funzione Intervallo di impostazione/contenuto Valore iniziale Note
F005 Inserimento password visualizzazione
0000h… FFFFh 0000h
F006 Impostazione password visualizzazione
0000h… FFFFh 0000h
F007 Inserimento password blocco software
0000h… FFFFh 0000h
F008 Impostazione password blocco software
0000h… FFFFh 0000h
F011 Limitazione alla visualizzazione del codice funzione
00: ALL (visualizzazione completa) 0001: FUNCTION (visualizzazione specifica per la funzione)02: USER (impostazione utente)03: COMPARE (visualizzazione del confronto dati)05: MONITOR (solo visualizzazione di monitoraggio)
F013 Selezione blocco software 00: MD0 (solo modifiche F013 con SFT: ON) 0001: MD1 (solo F013 e dati di frequenza con SFT: ON)02: MD2 (solo modifiche F013 sempre)03: MD3 (solo F013 e dati di frequenza sempre)
Password non impostataAccesso disabilitato
Impostazione passwordEs.: F006=1234
Impostazione passwordAccesso disabilitato
F006 non può visualizzareF005 può visualizzare
Impostazione passwordAccesso abilitato
F006 può visualizzareF005 può visualizzare
Eliminazione passwordTramite F006=0000
F005=1234
Riavvio
FUNCTION M1-STOP CMP
A001
[01 - 08]
Speed ref. source
02:0I
32
Utilizzo del display LCD Sezione 3-1
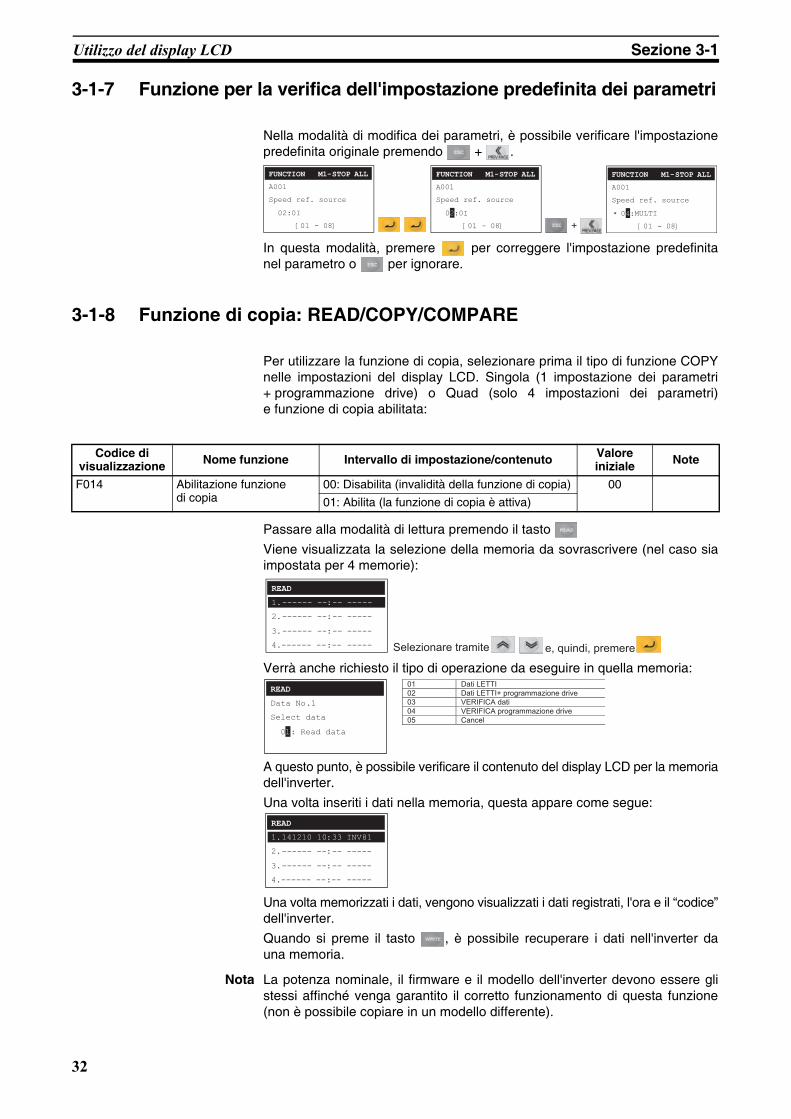
3-1-7 Funzione per la verifica dell'impostazione predefinita dei parametri
Nella modalità di modifica dei parametri, è possibile verificare l'impostazionepredefinita originale premendo + .
In questa modalità, premere per correggere l'impostazione predefinitanel parametro o per ignorare.
3-1-8 Funzione di copia: READ/COPY/COMPARE
Per utilizzare la funzione di copia, selezionare prima il tipo di funzione COPYnelle impostazioni del display LCD. Singola (1 impostazione dei parametri+ programmazione drive) o Quad (solo 4 impostazioni dei parametri)e funzione di copia abilitata:
Passare alla modalità di lettura premendo il tasto Viene visualizzata la selezione della memoria da sovrascrivere (nel caso siaimpostata per 4 memorie):
Verrà anche richiesto il tipo di operazione da eseguire in quella memoria:
A questo punto, è possibile verificare il contenuto del display LCD per la memoriadell'inverter.Una volta inseriti i dati nella memoria, questa appare come segue:
Una volta memorizzati i dati, vengono visualizzati i dati registrati, l'ora e il “codice”dell'inverter.Quando si preme il tasto , è possibile recuperare i dati nell'inverter dauna memoria.
Nota La potenza nominale, il firmware e il modello dell'inverter devono essere glistessi affinché venga garantito il corretto funzionamento di questa funzione(non è possibile copiare in un modello differente).
FUNCTION M1-STOP ALL
A001
[01 - 08]
Speed ref. source
02:0I
FUNCTION M1-STOP ALL
A001
[01 - 08]
Speed ref. source
02:0I2
+
FUNCTION M1-STOP ALL
A001
[01 - 08]
Speed ref. source
04:MULTI4*
Codice di visualizzazione Nome funzione Intervallo di impostazione/contenuto Valore
iniziale Note
F014 Abilitazione funzione di copia
00: Disabilita (invalidità della funzione di copia) 0001: Abilita (la funzione di copia è attiva)
READ
1.------ --:-- -----
4.------ --:-- -----
2.------ --:-- -----
3.------ --:-- -----
e, quindi, premereSelezionare tramite
01 Dati LETTI 02 Dati LETTI+ programmazione drive03 VERIFICA dati04 VERIFICA programmazione drive05 Cancel
0 1
READ
Data No.1
Select data
: Read data
READ
1.141210 10:33 INV81
4.------ --:-- -----
2.------ --:-- -----
3.------ --:-- -----

33
Utilizzo del display LCD Sezione 3-1
3-1-9 Inizializzazione dei parametri dell'inverter
Per ripristinare tutti i parametri, impostare F030=04 e quindi F034=01.
Codice di visualiz-zazione
Nome funzione Intervallo di impostazione/contenuto Valore
iniziale Note
F030 Selezione modalità di inizializza-zione
00: No (disabilitata) 0001: Err data (cronologia degli errori)02: Parametro03: Err/Pm (cronologia degli errori e parametro)04: Err/Pm/EzSQ (cronologia degli errori, parametri e programmazione drive)
F032 Selezione dati di ini-zializza-zione
00: Tutto (tutti i dati) 0001: Exc. TERM (il parametro associato ai terminali viene escluso)02: Exc. COM (il parametro associato alle comunicazioni viene escluso)03: Exc. TERM/COM (il parametro associato al terminale e alle comunicazioni viene escluso)
F034 Inizializza selezione attivazione
00: Nessuna azione (disabilitata) 0001: 'Inizializza (abilitata)

34
Utilizzo del display LCD Sezione 3-1

35
SEZIONE 4Avvio sistema di sollevamento
4-1 Impostazioni modalità di controllo
4-1-1 Impostazione della configurazione dell'encoder (modalità ad anello chiuso)
Elenco degli encoder conosciuti supportati:
Codice di visualiz-zazione
Nome funzione Intervallo di impostazione/contenuto Valore
iniziale Note
A044 Impostazione modalità di controllo, primo motore
00: IM-VC (controllo V/F) 00 Per il secondo motore: A244
03: IM-OLV (controllo vettoriale ad anello aperto)04: IM-0HzOLV (controllo vettoriale ad anello aperto (dominio 0 Hz))05: IM-CLV (controllo vettoriale ad anello chiuso (IM))06: PM-CLV (controllo vettoriale ad anello chiuso (PM))
Tipo RiferimentoLine driver Tutti gli encoder incrementali da 128 a 10.000EnDat 2.1 Heidenhain:
• ECN1313 EnDAT01• ECN1325 EnDAT01• ECN113 EnDAT01• ECN413 EnDAT01• ECN425 EnDAT01• EQN425 EnDAT01 (multigiro)• ROQ425 EnDAT01 (multigiro)Qualsiasi modello EnDat 2.1 compatibile con quanto riportato sopra.
EnDat 2.2 Heidenhain:• ECN423 EnDAT02• ECN425 EnDAT02• ECN1325 EnDAT02• ECN125 EnDAT02• ROQ437 EnDAT02 (multigiro)• EQN437 EnDAT02 (multigiro)• EQN1337 EnDAT02 (multigiro)Qualsiasi modello EnDat 2.2 compatibile con quanto riportato sopra.
Hiperface Stegmann:• SRS50• SRS60• SRS660• SRM50 (multigiro)• SRM60 (multigiro)Qualsiasi modello Hiperface compatibile con l'encoder precedente.

36
Impostazione dei parametri degli ascensori Sezione 4-2
Se il tipo di encoder è EnDat o Hiperface ed è abilitata l'impostazioneautomatica dei parametri, l'inverter controllerà i dati dell'encoder e imposteràautomaticamente gli impulsi e la profondità dei bit dell'encoder. L'esecuzionedi tale verifica richiederà alcuni s alla sequenza di avvio dell'inverter. Se iltempo di avvio è importante per il sistema, è possibile impostare taleparametro su disabilitato e i parametri possono essere corretti dall'utente.
4-2 Impostazione dei parametri degli ascensoriÈ necessario impostare i valori corretti del sistema di sollevamento per uncorretto funzionamento delle funzioni di scala e di alcune funzioni dilimitazione. Le informazioni sul sistema meccanico di base devono essereimpostate nei parametri LX.
4-2-1 Diametro della puleggiaIl diametro della puleggia (F015) è la puleggia in cui le corde dell'ascensorericevono la forza motore. Nel caso di un motore con riduttore, questo vienecollegato dopo la riduzione (in questo caso il rapporto di riduzione deveessere definito in F017). Nel caso di un motore senza riduttore, costituisceparte integrante del motore (come indicato in figura).
Parametro Descrizione ValoreP003 Impostazione
automatica dei parametri per l'encoder
00: Disabilitato01: Abilitato
P004 Selezione sorgente retroazione della velocità del primo motore
00: non (non utilizzato)01: ch1-inc (incrementale (CH1))02: ch1-HIPER (HIPERFACE (CH1))03: ch1-En2.1 (EnDat 2.1 (CH1))04: ch1-En2.2 (EnDat 2.2 (CH1))05: ch2-inc (incrementale (CH2))06: ch2-HIPER (HIPERFACE (CH2))07: ch2-En2.1 (EnDat 2.1 (CH2))08: ch2-En2.2 (EnDat 2.2 (CH2))
Parametro Descrizione ValoreP010 CH1-Impostazione della costante ENC 1.024P011 CH1-Impostazione della risoluzione ENC 0
Parametro Nome funzione Intervallo di impostazione/contenuto
Valore iniziale
F015 Diametro puleggia 100… 2.000 (mm) 400F016 Rapporto corde 00: (1:1) 00
01: (1:2)02: (1:3)03: (1:4)
F017 Rapporto di riduzione 0,10… 40,00 1,00

37
Impostazione dei parametri degli ascensori Sezione 4-2
4-2-2 Rapporto delle corde
F016 si riferisce al modo in cui la forza del motore viene trasmessa alla cabinadell'ascensore utilizzando sistemi di sospensione della puleggia differenti.Tramite il rapporto delle corde è possibile aggiungere alcune forze moltiplicatealla cabina, in cambio di una diminuzione proporzionale della velocità.I rapporti più comuni in un ascensore medio sono 1:1 e 2:1.Il rapporto 1:1 rappresenta una soluzione meccanica molto economica e didimensioni compatte, con lo svantaggio che il carico dell'ascensore si riflettedirettamente sulla puleggia del motore rendendo più difficile il raggiungimentodi prestazioni perfette, soprattutto nel caso di motori senza riduttore (senzatrasmissione).
Avvolgimento completo 1:1 tipico
Mezzo avvolgimento 2:1 tipico
Mezzo avvolgimento 2:1 tipico
• Installazione economica• Minor spazio• Difficoltà di regolazione• Difficoltà di manutenzione• Comfort ridotto
• Costoso • Maggiore spazio • Facilità di regolazione • Comfort elevato • Ottimo in assenza di locali
• Bilanciato • Spazio medio • Di media regolazione • Comfort buono • Ottimo per ascensori per locali
Mezzo avvolgimento 3:1 non comune
Mezzo avvolgimento 4:1 tipico
Elevatori per merci di capacità elevata

38
Impostazione dei parametri degli ascensori Sezione 4-2
4-2-3 Direzione di rotazione del motore e degli encoderÈ necessario conoscere bene alcuni argomenti relativi all'installazione dei motoriprima di procedere.Dove si trova encoder collegato che fa riferimento all'inverter?Dove è installato il motore nel vano di corsa?La rotazione in senso orario avviene in direzione Up o Down?La sequenza U – V – W corrisponde per impostazione predefinita al comandodi direzione UP e alla precedenza encoder di fase A prima di quello di fase B.La fase relativa all'encoder generalmente dipende dalla posizione di installazionedell'encoder rispetto alla rotazione del motore. Sono disponibili motori conframe e forme simili che ruotano in direzioni differenti.
Nota Gli encoder incrementali possono modificare la direzione della rotazionemediante uno scambio di A <-> B e /A <-> /B. Gli encoder EnDato HIPERFACE non modificheranno la direzione di rotazione tramite loscambio dei segnali SIN <-> COS, in quanto internamente all'encoder,i segnali vengono sempre interpretati nella stessa direzione per il componentedi comunicazione assoluto (pertanto, una modifica comporterà una mancatacorrispondenza tra la lettura incrementale nella scheda dell'encoder e la letturaassoluta tramite le comunicazioni dell'encoder).
Generalmente, si utilizzerà il parametro A016 per modificare la direzionedi funzionamento del motore senza modificare il cablaggio dei collegamentidel motore.Grazie solo a questo parametro, l'inverter gestirà il funzionamento a marciaindietro in modo corretto senza ulteriori impostazioni.
Parametro Nome funzione Intervallo di impostazione/contenuto
Valore iniziale
A016 Inversione rotazione motore
00: Diretta (fase A principale) 0001: Indietro (fase B principale)
P016 CH1-Posizione ENC 00: Diretta (fase A principale) 0001: Indietro (fase B principale)
P026 CH2-Posizione ENC 00: Diretta (fase A principale) 0001: Indietro (fase B principale)
La maggior parte dei motori europei ruotano in senso orario con il comando UP
UPL
U, V, WInverter
in senso orario
A B
SenoCoseno
La maggior parte dei motori asiatici ruotano in senso antiorario con il comando UP
UPL
U, V, WInverter
in senso antiorarioA B
SenoCoseno
Istruzioni di azionamento
A016 (uscita [soujun])
Uscita al motore (direzione europea)
Segno di d008
P016/P026 (encoder)
UP/FWD 00: Diretta In senso orario (CW) Plus 00: DirettaMeno 01: Indietro
In senso antiorario (CCW) Plus 00: DirettaMeno 01: Indietro
01: Indietro In senso orario (CW) Plus 01: IndietroMeno 00: Diretta
In senso antiorario (CCW) Plus 01: IndietroMeno 00: Diretta

39
Interfaccia per l'unità di controllo Sezione 4-3
La maggior parte delle volte, questa impostazione verrà utilizzata per adattarela posizione di installazione del motore in installazioni senza locale, comeindicato nella figura.Si consiglia di cablare il motore sempre con gli stessi collegamenti e di modificarela direzione di rotazione utilizzando il parametro A016.
4-2-4 Scelta delle unità per la velocità e l'accelerazione
4-3 Interfaccia per l'unità di controllo
Sono disponibili molti tipi di unità di controllo di sollevamento sul mercato.Alcuni di essi sono sistemi di controllo molto vecchi, predisposti perl'installazione di un motore a 2 velocità.Altri sono sistemi moderni basati su CPU, predisposti per il controllo degli inverter.Grazie alle molteplici possibilità, il modello LX implementa una velocitàflessibile con un sistema di riferimento del controllo. Il modello LX può essereadattato in modo virtuale a qualsiasi segnale relativo ai requisiti di controllo.
A016 (inversione della rotazione del motore)=0UP = in senso orario
A016 (inversione della rotazione del motore)=1UP = in senso antiorario
Parametro Nome funzione Intervallo di impostazione/contenuto
Valore iniziale Note
F020 Selezione unità di velocità
00: Hz 0001: min-102: m/s03: %04: ft/m
F021 Selezione unità di accelerazione/decelerazione
00: s (s) 00
01: m/s2
40
Interfaccia per l'unità di controllo Sezione 4-3
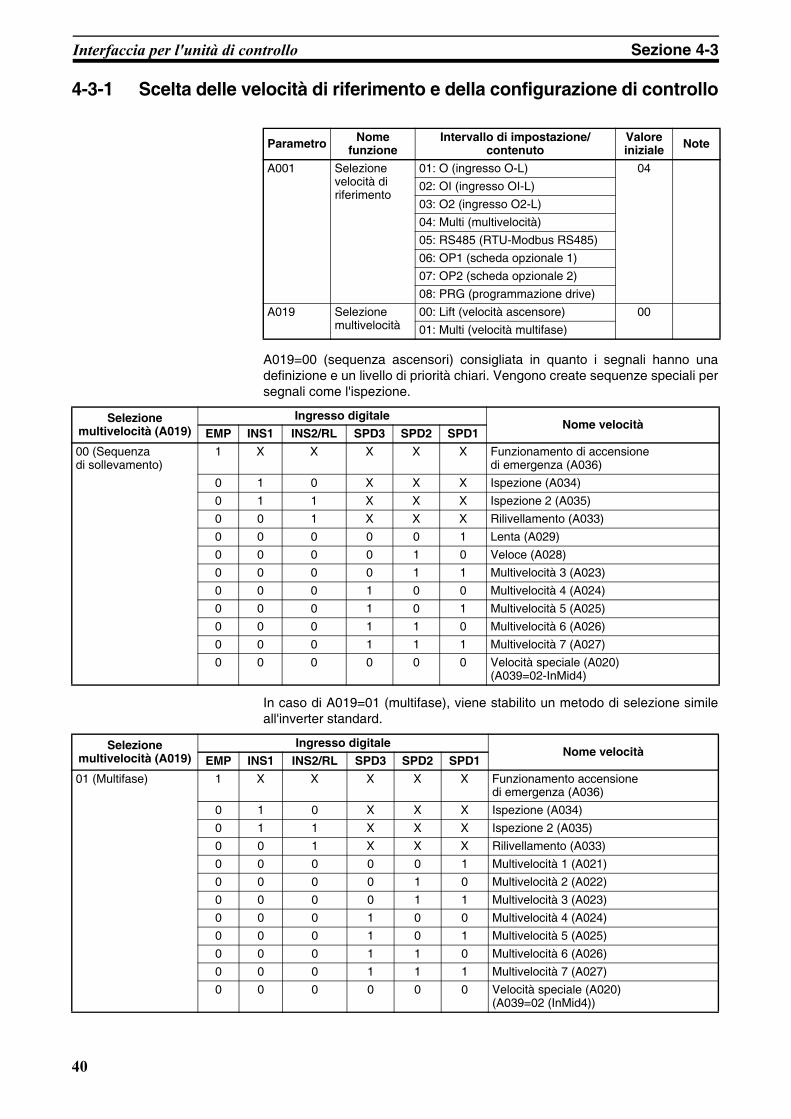
4-3-1 Scelta delle velocità di riferimento e della configurazione di controllo
A019=00 (sequenza ascensori) consigliata in quanto i segnali hanno unadefinizione e un livello di priorità chiari. Vengono create sequenze speciali persegnali come l'ispezione.
In caso di A019=01 (multifase), viene stabilito un metodo di selezione simileall'inverter standard.
Parametro Nome funzione
Intervallo di impostazione/contenuto
Valore iniziale Note
A001 Selezione velocità di riferimento
01: O (ingresso O-L) 0402: OI (ingresso OI-L)03: O2 (ingresso O2-L)04: Multi (multivelocità)05: RS485 (RTU-Modbus RS485)06: OP1 (scheda opzionale 1)07: OP2 (scheda opzionale 2)08: PRG (programmazione drive)
A019 Selezione multivelocità
00: Lift (velocità ascensore) 0001: Multi (velocità multifase)
Selezione multivelocità (A019)
Ingresso digitaleNome velocità
EMP INS1 INS2/RL SPD3 SPD2 SPD100 (Sequenza di sollevamento)
1 X X X X X Funzionamento di accensione di emergenza (A036)
0 1 0 X X X Ispezione (A034)0 1 1 X X X Ispezione 2 (A035)0 0 1 X X X Rilivellamento (A033)0 0 0 0 0 1 Lenta (A029)0 0 0 0 1 0 Veloce (A028)0 0 0 0 1 1 Multivelocità 3 (A023)0 0 0 1 0 0 Multivelocità 4 (A024)0 0 0 1 0 1 Multivelocità 5 (A025)0 0 0 1 1 0 Multivelocità 6 (A026)0 0 0 1 1 1 Multivelocità 7 (A027)0 0 0 0 0 0 Velocità speciale (A020)
(A039=02-InMid4)
Selezione multivelocità (A019)
Ingresso digitaleNome velocità
EMP INS1 INS2/RL SPD3 SPD2 SPD101 (Multifase) 1 X X X X X Funzionamento accensione
di emergenza (A036)0 1 0 X X X Ispezione (A034)0 1 1 X X X Ispezione 2 (A035)0 0 1 X X X Rilivellamento (A033)0 0 0 0 0 1 Multivelocità 1 (A021)0 0 0 0 1 0 Multivelocità 2 (A022)0 0 0 0 1 1 Multivelocità 3 (A023)0 0 0 1 0 0 Multivelocità 4 (A024)0 0 0 1 0 1 Multivelocità 5 (A025)0 0 0 1 1 0 Multivelocità 6 (A026)0 0 0 1 1 1 Multivelocità 7 (A027)0 0 0 0 0 0 Velocità speciale (A020)
(A039=02 (InMid4))

41
Interfaccia per l'unità di controllo Sezione 4-3
In modalità Multivelocità, non è disponibile alcun riconoscimento diretto deltipo di velocità selezionata (superiore, livellamento, ispezione).Per riconoscerla, è possibile definire 2 parametri come limiti per la velocitàlenta, di ispezione ed elevata.Per un corretto funzionamento, sono disponibili diverse funzioni (3 ASR, Rapidoal piano, sequenza di ispezione, riavvio a velocità elevata).
In pratica:
Il comportamento della condizione di velocità di riferimento mancante (tutti gliingressi aperti) viene selezionato con A039.
Quando il sistema di controllo blocca la sequenza in caso di mancatachiusura dell'uscita del contattore dall'inverter (nessuna chiusura del GS; adesempio, nel caso tipico, ma non consigliato, in cui l'inverter GS vienecomandato tramite contatto ausiliario dal contattore), allora è possibileignorare il GS per avviare la sequenza (b074=02).
Selezione della risposta “nessuna velocità di riferimento” (nessun ingressodigitale per la velocità di riferimento chiuso). È possibile effettuare l'arresto inassenza degli ingressi di selezione della velocità utilizzando A040=00.
Parametro Nome funzione Intervallo di impostazione/contenuto
Valore iniziale Note
A037 Limite superiore velocità di ispezione
0,00… velocità massima (Hz)
30,00
A038 Livello di rilevamento velocità rapida/lenta
0,00… velocità massima (Hz)
20,00
Condizione Corrispondenza istruzione di velocitàVelocità selezionata < A038 Istruzione velocità bassa (Lenta)A038 < velocità selezionata < A037 Velocità di esecuzione dell'ispezioneA037 < velocità selezionata Istruzione di velocità elevata (Veloce)
Parametro Nome funzione Intervallo di impostazione/contenuto
Valore iniziale Note
A039 La modalità di funzionamento in caso di velocità di riferimento mancante [Op-Mode @Spd Cmd lost]
00: Arresto 0101: Lenta02: Speciale (velocità speciale)
Parametro Nome funzione Intervallo di impostazione/contenuto
Valore iniziale Note
b074 Errore RUN separato attivo sul GS[Separated RUN timing]
00: Err (errore normale) 0001: Seq-err (errore sequenza)02: Errore silenzioso
Parametro Nome funzione Intervallo di impostazione/contenuto
Valore iniziale Note
A040 La modalità di funzionamento in caso di velocità di riferimento @zero [Op-Mode @Spd Cmd lost]
00: STOP 0001: RUN02: BRAKE
Velocità
A038
Superiore
A037
Alta
Ispezione
Lenta

42
Interfaccia per l'unità di controllo Sezione 4-3
Selezione della reazione a una velocità di riferimento elevata dopo un avviolento (anormale nella sequenza di sollevamento). Per evitare ciò (e tenereuna velocità lenta), selezionare A105=00 e la reazione desiderata in A106.
Selezione della reazione alla velocità di riferimento zero (da qualsiasisorgente, con qualsiasi combinazione di ingressi digitali).
Assegnazione delle multifunzioni corrispondenti agli ingressi/uscite appropriati:
Modifica delle velocità di riferimento in base alla combinazione generale.
Parametro Nome funzione Intervallo di impostazione/contenuto
Valore iniziale Note
A105 Riavvio a velocità elevata[Hi-Speed Retrigger]
00: Disabilitato 0001: Abilitato
A106 Modalità di esecuzione con @A105 = disabilitata[Hi-Speed Retrg. mode]
00: Arresto 0001: Errore02: Seq-Err03: Errore silenzioso
Parametro Nome funzione Intervallo di impostazione/contenuto
Valore iniziale Note
A040 La modalità di funzionamento in caso di velocità di riferimento @zero [Op-Mode @Spd Cmd lost]
00: STOP 0001: RUN02: BRAKE
Parametro Nome funzione Intervallo di impostazione/contenuto
Valore iniziale Note
C001… C009
Terminale di ingresso multifunzione da 1 a 7/GS1/GS2
02: SPD1 (impostazione multivelocità 1)
-
03: SPD2 (impostazione multivelocità 2)04: SPD3 (impostazione multivelocità 3)61: EMP (funzionamento accensione di emergenza)62: INSP (ispezione)63: RL (rilivellamento)
Parametro Nome funzione Intervallo di impostazione/contenuto
Valore iniziale Note
A020 Velocità speciale 0,00… velocità massima (Hz) 0,00A021 Multivelocità 1 0,00… velocità massima (Hz) 0,00A022 Multivelocità 2 0,00… velocità massima (Hz) 0,00A023 Multivelocità 3 0,00… velocità massima (Hz) 0,00A024 Multivelocità 4 0,00… velocità massima (Hz) 0,00A025 Multivelocità 5 0,00… velocità massima (Hz) 0,00A026 Multivelocità 6 0,00… velocità massima (Hz) 0,00A027 Multivelocità 7 0,00… velocità massima (Hz) 0,00A028 Alta velocità 0,00… velocità massima (Hz) 0,00A029 Velocità lenta 0,00… velocità massima (Hz) 0,00A034 Velocità di
ispezione 10,00… velocità massima (Hz) 0,00
A035 Velocità di ispezione 2
0,00… velocità massima (Hz) 0,00
A036 Velocità di accensione di emergenza
0,00… velocità massima (Hz) 0,00
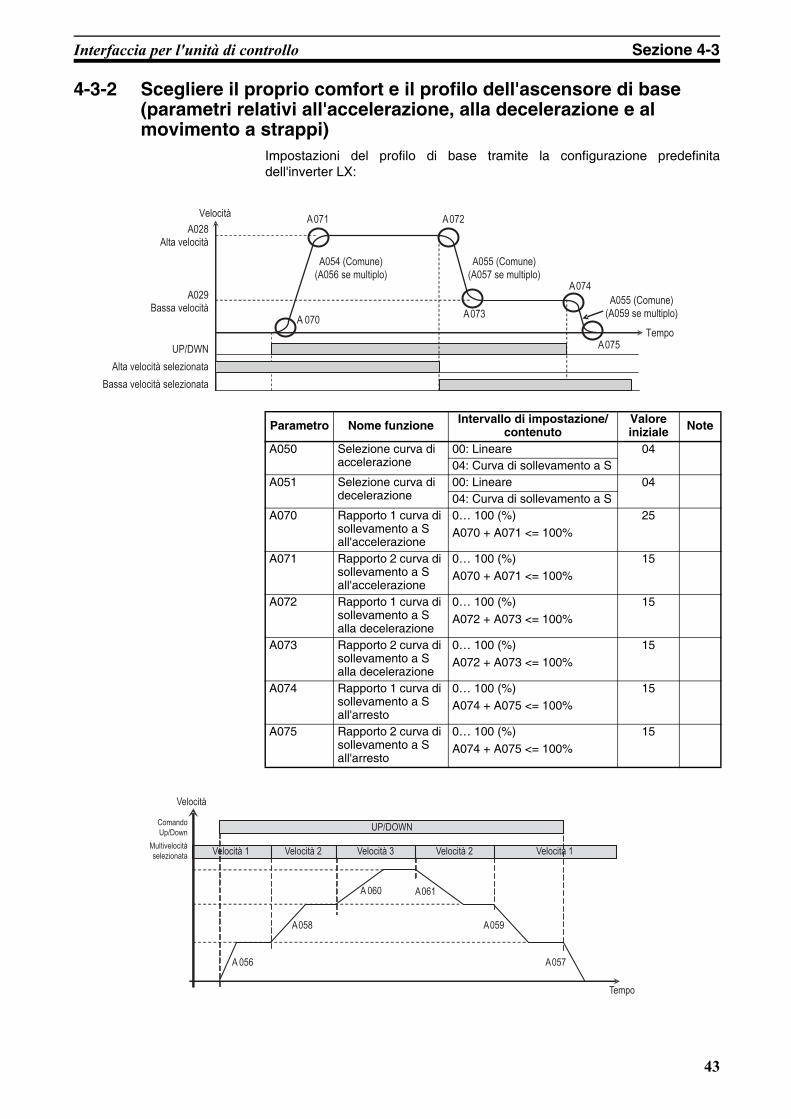
43
Interfaccia per l'unità di controllo Sezione 4-3
4-3-2 Scegliere il proprio comfort e il profilo dell'ascensore di base (parametri relativi all'accelerazione, alla decelerazione e al movimento a strappi)
Impostazioni del profilo di base tramite la configurazione predefinitadell'inverter LX:
Velocità
TempoUP/DWN
Alta velocità selezionata
A028Alta velocità
A029Bassa velocità
A 070
A071 A072
A073
A074
A075
Bassa velocità selezionata
A054 (Comune)(A056 se multiplo)
A055 (Comune)(A057 se multiplo)
A055 (Comune)(A059 se multiplo)
Parametro Nome funzione Intervallo di impostazione/contenuto
Valore iniziale Note
A050 Selezione curva di accelerazione
00: Lineare 0404: Curva di sollevamento a S
A051 Selezione curva di decelerazione
00: Lineare 0404: Curva di sollevamento a S
A070 Rapporto 1 curva di sollevamento a S all'accelerazione
0… 100 (%)A070 + A071 <= 100%
25
A071 Rapporto 2 curva di sollevamento a S all'accelerazione
0… 100 (%)A070 + A071 <= 100%
15
A072 Rapporto 1 curva di sollevamento a S alla decelerazione
0… 100 (%)A072 + A073 <= 100%
15
A073 Rapporto 2 curva di sollevamento a S alla decelerazione
0… 100 (%)A072 + A073 <= 100%
15
A074 Rapporto 1 curva di sollevamento a S all'arresto
0… 100 (%)A074 + A075 <= 100%
15
A075 Rapporto 2 curva di sollevamento a S all'arresto
0… 100 (%)A074 + A075 <= 100%
15
Velocità 1 Velocità 2
Velocità
Tempo
Velocità 3 Velocità 2 Velocità 1
A 056
A058
A 060 A061
A059
A057
UP/DOWNComando Up/Down
Multivelocità selezionata
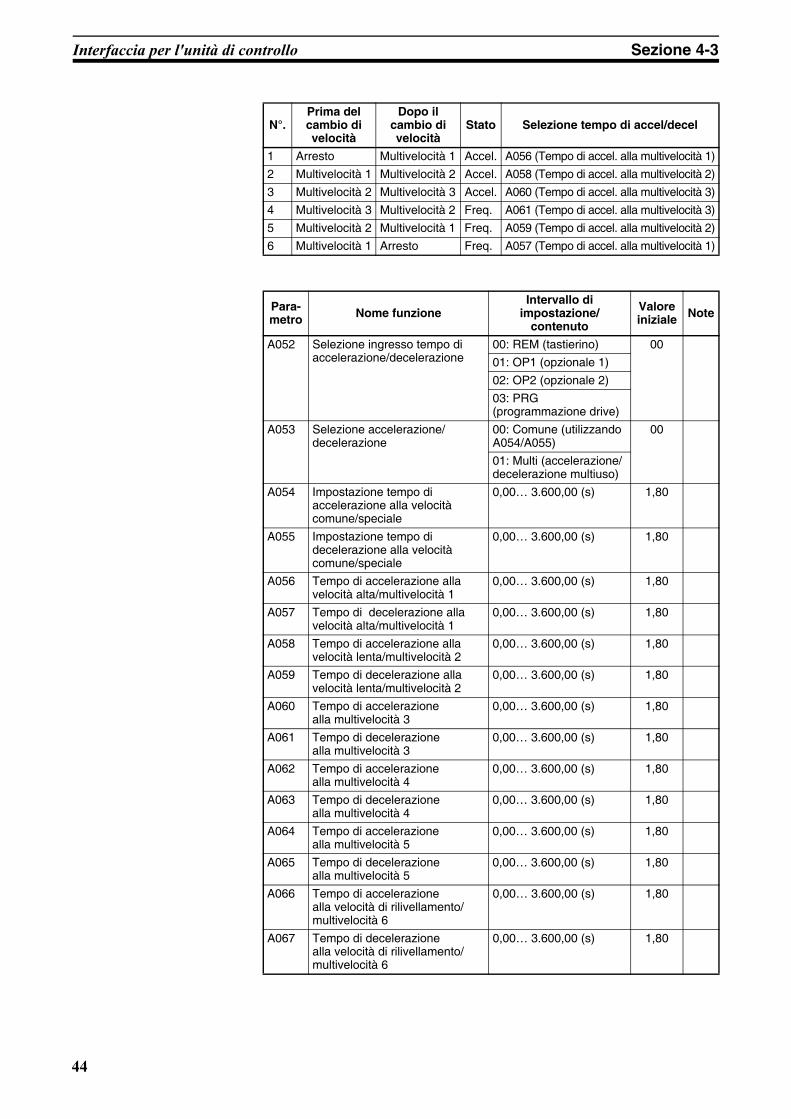
44
Interfaccia per l'unità di controllo Sezione 4-3
N°.Prima del cambio di velocità
Dopo il cambio di velocità
Stato Selezione tempo di accel/decel
1 Arresto Multivelocità 1 Accel. A056 (Tempo di accel. alla multivelocità 1)2 Multivelocità 1 Multivelocità 2 Accel. A058 (Tempo di accel. alla multivelocità 2)3 Multivelocità 2 Multivelocità 3 Accel. A060 (Tempo di accel. alla multivelocità 3)4 Multivelocità 3 Multivelocità 2 Freq. A061 (Tempo di accel. alla multivelocità 3)5 Multivelocità 2 Multivelocità 1 Freq. A059 (Tempo di accel. alla multivelocità 2)6 Multivelocità 1 Arresto Freq. A057 (Tempo di accel. alla multivelocità 1)
Para-metro Nome funzione
Intervallo di impostazione/
contenuto
Valore iniziale Note
A052 Selezione ingresso tempo di accelerazione/decelerazione
00: REM (tastierino) 0001: OP1 (opzionale 1)02: OP2 (opzionale 2)03: PRG (programmazione drive)
A053 Selezione accelerazione/decelerazione
00: Comune (utilizzando A054/A055)
00
01: Multi (accelerazione/decelerazione multiuso)
A054 Impostazione tempo di accelerazione alla velocità comune/speciale
0,00… 3.600,00 (s) 1,80
A055 Impostazione tempo di decelerazione alla velocità comune/speciale
0,00… 3.600,00 (s) 1,80
A056 Tempo di accelerazione alla velocità alta/multivelocità 1
0,00… 3.600,00 (s) 1,80
A057 Tempo di decelerazione alla velocità alta/multivelocità 1
0,00… 3.600,00 (s) 1,80
A058 Tempo di accelerazione alla velocità lenta/multivelocità 2
0,00… 3.600,00 (s) 1,80
A059 Tempo di decelerazione alla velocità lenta/multivelocità 2
0,00… 3.600,00 (s) 1,80
A060 Tempo di accelerazione alla multivelocità 3
0,00… 3.600,00 (s) 1,80
A061 Tempo di decelerazione alla multivelocità 3
0,00… 3.600,00 (s) 1,80
A062 Tempo di accelerazione alla multivelocità 4
0,00… 3.600,00 (s) 1,80
A063 Tempo di decelerazione alla multivelocità 4
0,00… 3.600,00 (s) 1,80
A064 Tempo di accelerazione alla multivelocità 5
0,00… 3.600,00 (s) 1,80
A065 Tempo di decelerazione alla multivelocità 5
0,00… 3.600,00 (s) 1,80
A066 Tempo di accelerazione alla velocità di rilivellamento/multivelocità 6
0,00… 3.600,00 (s) 1,80
A067 Tempo di decelerazione alla velocità di rilivellamento/multivelocità 6
0,00… 3.600,00 (s) 1,80

45
Interfaccia per l'unità di controllo Sezione 4-3
4-3-3 Scelta delle temporizzazioni della sequenza di sollevamento (modalità di controllo della velocità visualizzata)
Controllo contattore:
A068 Tempo di accelerazione alla velocità di ispezione/multivelocità 7
0,00… 3.600,00 (s) 1,80
A069 Tempo di decelerazione alla velocità di ispezione/multivelocità 7
0,00… 3.600,00 (s) 1,80
Para-metro Nome funzione
Intervallo di impostazione/
contenuto
Valore iniziale Note
A093 A094
A096 A097A090 A091
TempoA09 2 A095 A095 A092
Alta velocità
GS
In UP/DWN
In (alta velocità)
In (bassa velocità)
Uscita inverter
Controllo contattore
Retroazione contattore
Segnale di controllo freno
Segnale di verifica freno
Velocità di uscita
Bassa velocità
Para-metro Nome funzione Intervallo di impostazione/
contenutoValore iniziale Note
A090 Tempo di ritardo RUN, primo motore
0,00… 2,00 (s) 0,20 Per la seconda impostazione A290
A091 Tempo di ritardo contattore, primo motore
0,00… 2,00 (s) 0,10 Per la seconda impostazione A291
A092 Tempo verifica risposta contattore, primo motore
0,00… 5,00 (s) 0,10 Per la seconda impostazione A292
b070 Errore di verifica contattore separato
00: Errore (errore normale) 0001: Seq-Err (errore sequenza)02: Errore silenzioso
b074 RUN separato attivo in caso di errore GS
00: Errore (errore normale) 0001: Seq-Err (errore sequenza)02: Errore silenzioso

46
Interfaccia per l'unità di controllo Sezione 4-3
Controllo freno:
C001… C009
Terminale di ingresso multifunzione da 1 a 7/GS1/GS2
64: COK (segnale di verifica contattore)
-
C021… C026
Relè di uscita multifunzione da 11 a 13/RY
51: CON (segnale di controllo contattore)
-
Para-metro Nome funzione Intervallo di
impostazione/contenutoValore iniziale Note
A093 Tempo di ritardo apertura freno, primo motore
0,00… 2,00 (s) 0,20 Per il secondo motore A293
A094 Tempo di ritardo chiusura freno, primo motore
0,00… 2,00 (s) 0,20 Per il secondo motore A294
A095 Tempo verifica risposta freno, primo motore
0,00… 5,00 (s) 0,10 Per il secondo motore A295
A096 Tempo di iniezione c.c./blocco servo all'avvio, primo motore
0,00… 10,00 (s) 0,60 Per il secondo motore A296
A097 Tempo di iniezione c.c./blocco servo all'arresto, primo motore
0,00… 10,00 (s) 0,60 Per il secondo motore A297
A098 Alimentazione iniezione c.c. all'avvio, primo motore
0… 100 (%) 50 Per il secondo motore A298
A099 Alimentazione iniezione c.c. all'arresto, primo motore
0… 100 (%) 50 Per il secondo motore A299
b071 Errore di verifica freno separato
00: Errore (errore normale) 0001: Seq-Err (errore sequenza)02: Errore silenzioso
b078 Errore di condizione freno separato
00: Errore (errore normale) 0001: Seq-Err (errore sequenza)02: Errore silenzioso
C001… C009
Terminale di ingresso multifunzione da 1 a 7/GS1/GS2
65: BOK (segnale controllo freno)
-
C021… C026
Relè di uscita multifunzione da 11 a 13/RY
52: BRK (segnale controllo freno)
-
Para-metro Nome funzione Intervallo di impostazione/
contenutoValore iniziale Note

47
SEZIONE 5Tuning sistema di sollevamento
5-1 Preparazione dei parametri del motore per l'autotuningPrima del processo di autotuning, è sufficiente impostare solo alcuniparametri della piastra del motore: potenza motore, numero di poli, correntenominale, velocità nominale e massima.
Tenere presente che una volta modificati i parametri relativi al numero di polie alla capacità del motore, l'inverter verificherà le tabelle dei dati interni delmotore e imposterà i parametri del motore con i nuovi dati. Non modificarequesti parametri una volta eseguito l'autotuning; in caso contrario, i datidell'autotuning andranno persi.
La corrente nominale si trova in un parametro differente per il motore IM e PM.
Ke (costante di tensione del motore PM) – (non può essere stabilita tramitetuning statico). Nel caso del motore PM, qualora fosse consentito solo iltuning statico, l'inverter può azionare il motore anche con una costante ditensione totalmente errata (l'inverter LX è in grado di trovare la costante Kecorretta durante il funzionamento), ma le prestazioni migliori si ottengono sela costante Ke è nota o stimata (vedere di seguito).J (costante inerzia di sollevamento e motore PM) – (non può esserestabilita tramite tuning statico). L'impostazione dell'inerzia predefinita deveessere sufficiente per lo spostamento dell'ascensore. Tuttavia, se si riscontraun'oscillazione, è probabile che il valore di inerzia sia basso. Provare adaumentare passo per passo oppure seguire i consigli riportati di seguiti sucome eseguire il tuning.
Se questi parametri non sono disponibili, è sufficiente una stimaapprossimativa. L'inverter LX tollera in modo notevole le impostazioni errate(viene applicata la regolazione automatica durante la marcia). Tuttavia, leprestazioni e l'uniformità dell'ascensore possono essere migliorate conun'impostazione e un tuning corretti dei parametri.
Parametro Nome funzione Intervallo di impostazione/contenuto
Valore iniziale
H003 Potenza del motore, primo motore
0,20… 75,00 (kW) kW
H004 Impostazione dei poli del motore, primo motore
2… 48 (poli) 4
A003 Impostazione velocità di base, primo motore
1,00 Hz… velocità massima (Hz), primo motore
50,00
A004 Impostazione velocità massima, primo motore
1,00 Hz… 400,00 Hz 50,00
Parametro Nome funzione Intervallo di impostazione/contenuto
Valore iniziale
H025 Corrente nominale motore IM, primo motore
0,0… 200,0 (A) kVA
H075 Corrente nominale motore PM, primo motore
0,0… 200,0 (A) kVA
Parametro Nome funzione Intervallo di impostazione/contenuto
Valore iniziale
H073 Costante tensione motore PM, primo motore
0,1… 6.553,5 (mV/(rad/s)) kVA
H074 Costante J motore PM, primo motore
0,001… 9.999,000 kVA
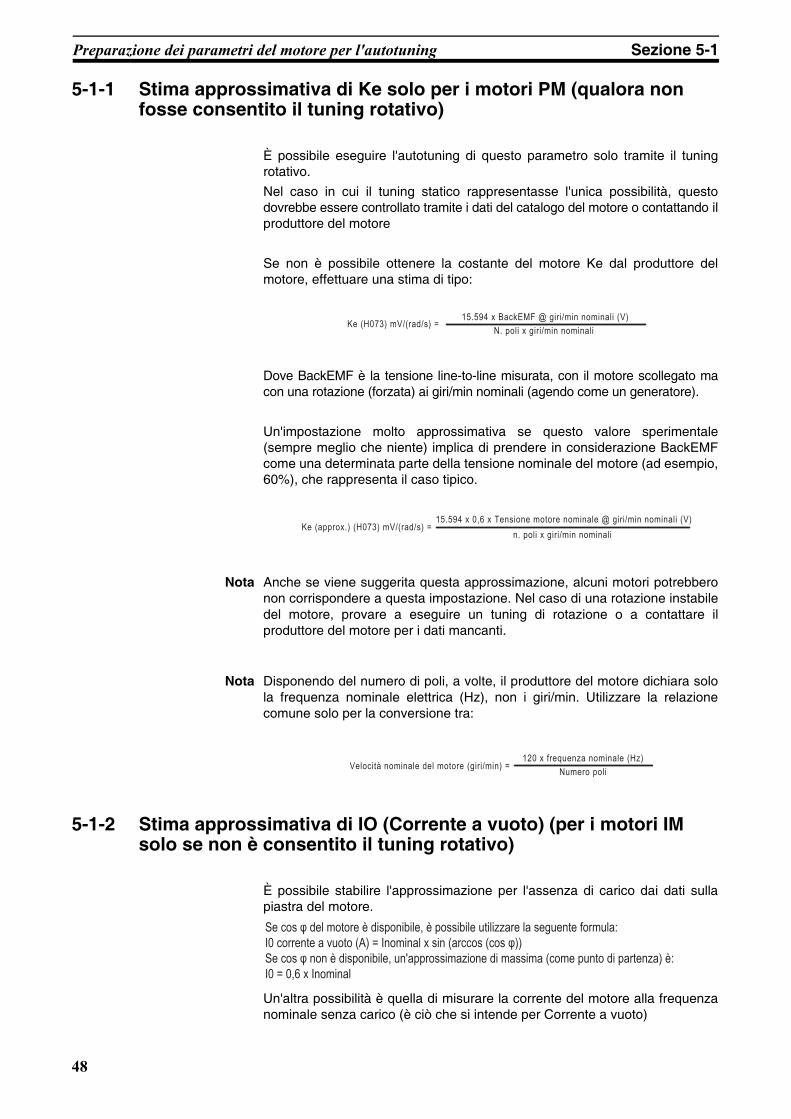
48
Preparazione dei parametri del motore per l'autotuning Sezione 5-1
5-1-1 Stima approssimativa di Ke solo per i motori PM (qualora non fosse consentito il tuning rotativo)
È possibile eseguire l'autotuning di questo parametro solo tramite il tuningrotativo.Nel caso in cui il tuning statico rappresentasse l'unica possibilità, questodovrebbe essere controllato tramite i dati del catalogo del motore o contattando ilproduttore del motore
Se non è possibile ottenere la costante del motore Ke dal produttore delmotore, effettuare una stima di tipo:
Dove BackEMF è la tensione line-to-line misurata, con il motore scollegato macon una rotazione (forzata) ai giri/min nominali (agendo come un generatore).
Un'impostazione molto approssimativa se questo valore sperimentale(sempre meglio che niente) implica di prendere in considerazione BackEMFcome una determinata parte della tensione nominale del motore (ad esempio,60%), che rappresenta il caso tipico.
Nota Anche se viene suggerita questa approssimazione, alcuni motori potrebberonon corrispondere a questa impostazione. Nel caso di una rotazione instabiledel motore, provare a eseguire un tuning di rotazione o a contattare ilproduttore del motore per i dati mancanti.
Nota Disponendo del numero di poli, a volte, il produttore del motore dichiara solola frequenza nominale elettrica (Hz), non i giri/min. Utilizzare la relazionecomune solo per la conversione tra:
5-1-2 Stima approssimativa di IO (Corrente a vuoto) (per i motori IM solo se non è consentito il tuning rotativo)
È possibile stabilire l'approssimazione per l'assenza di carico dai dati sullapiastra del motore.
Un'altra possibilità è quella di misurare la corrente del motore alla frequenzanominale senza carico (è ciò che si intende per Corrente a vuoto)
15.594 x BackEMF @ giri/min nominali (V)N. poli x giri/min nominali
Ke (H073) mV/(rad/s) =
15.594 x 0,6 x Tensione motore nominale @ giri/min nominali (V)n. poli x giri/min nominali
Ke (approx.) (H073) mV/(rad/s) =
120 x frequenza nominale (Hz)Numero poliVelocità nominale del motore (giri/min) =
Se cos φ del motore è disponibile, è possibile utilizzare la seguente formula: I0 corrente a vuoto (A) = Inominal x sin (arccos (cos φ)) Se cos φ non è disponibile, un'approssimazione di massima (come punto di partenza) è:I0 = 0,6 x Inominal

49
Autotuning statico offset del magnete (solo motore PM) Sezione 5-2
5-1-3 Stima del parametro di inerzia (IM o PM)
Qualora non fosse consentito il tuning rotativo, è possibile stimare ilparametro di inerzia calcolando l'inerzia riflessa del sistema di sollevamento,le corde e la puleggia riflesse sull'albero motore. Tuttavia, l'inerzia è moltosemplice da regolare manualmente durante le prime corse di provadell'ascensore verificando il comportamento dell'ascensore (vedere la sezioneImpostazione del parametro di inerzia).
5-2 Autotuning statico offset del magnete (solo motore PM)Accertarsi che il contattore sul motore sia chiuso (l'inverter chiuderà l'uscitadel contattore, ma spesso sono presenti più condizioni per la chiusura deicontattori del motore nel sistema di sollevamento).Non è necessario utilizzare il freno per rilasciare il tuning dell'offset di posizionedel magnete.Gli ingressi di sicurezza GS1 e GS2 devono essere chiusi nel caso in cui siaabilitata la sicurezza.
Passaggi del tuning dell'offset di posizione del magnete:• Contattore chiuso• Stima della posizione statica iniziale del magnete• Contattore aperto
Al termine dell'autotuning, viene visualizzato il messaggio “PM-Auto-tuningEnd”. Verificare il parametro P012-CH1-Offset posizione del magnete ENC(PM), se il valore del grado si avvicina all'ultimo valore, l'autotuning è riuscito.Viceversa, se il valore di P012 differisce notevolmente dall'ultimo, è necessarioeseguire prima l'autotuning.
5-3 Tuning statico totale (motore PM o IM)Il tuning statico misurerà l'offset del magnete (motori PM) e le grandezze deimotori elettrici (motori PM e IM) senza spostare il motore (il freno puòrimanere chiuso).Accertarsi che il contattore sul motore sia chiuso (l'inverter metterà in uscita ilcontattore, ma il sistema di controllo potrebbe disporre di ulteriori condizioni).Non è necessario utilizzare il freno per rilasciare la modalità di tuning statico.Gli ingressi di sicurezza GS1 e GS2 devono essere chiusi nel caso in cui siaabilitata la sicurezza.
Autotuning statico offset di posizione del magnete del motoreParametro Descrizione ValoreH001 Impostazione
autotuning05: MG-POS (tuning offset di posizione del magnete (PM))
Attiva segnale RUN (premere RUN sul tastierino)
Autotuning statico totale del motorePassaggio Parametro Descrizione Valore
1 H001 Impostazione autotuning
Per motore IM (01: NRT-IM)Per motore PM (03: NRT-PM)
2 Attiva segnale RUN (premere RUN sul tastierino)
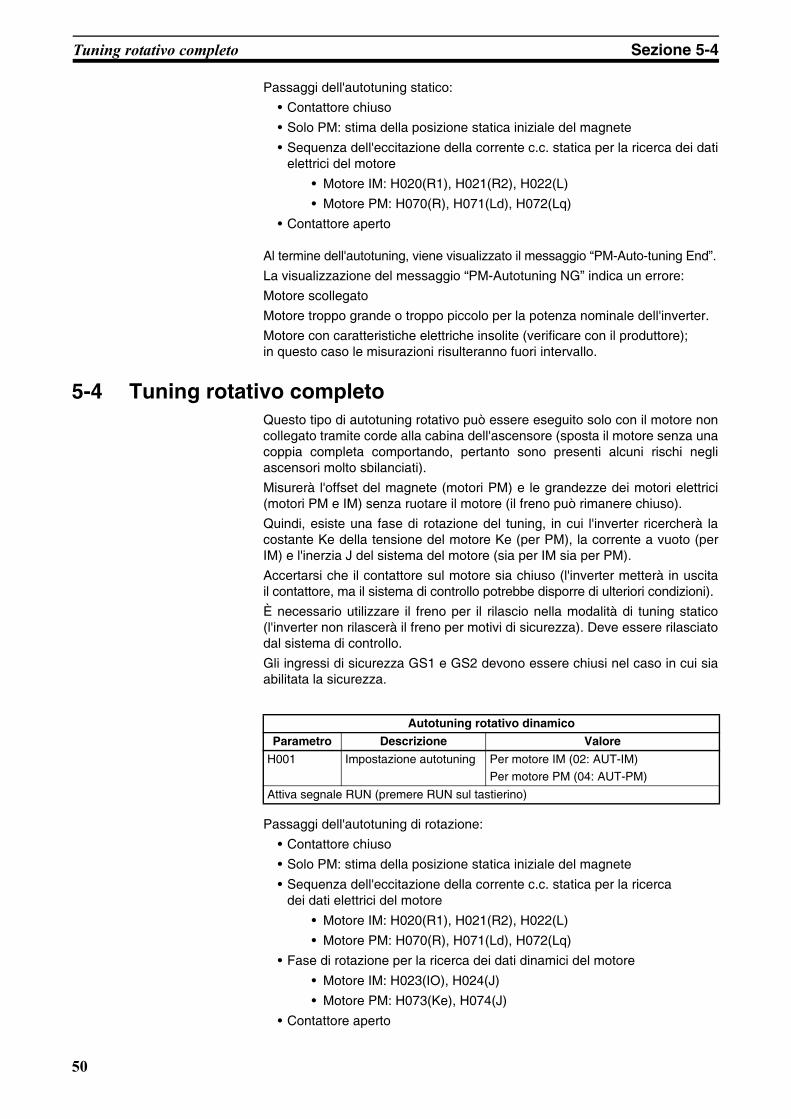
50
Tuning rotativo completo Sezione 5-4
Passaggi dell'autotuning statico:• Contattore chiuso• Solo PM: stima della posizione statica iniziale del magnete• Sequenza dell'eccitazione della corrente c.c. statica per la ricerca dei dati
elettrici del motore• Motore IM: H020(R1), H021(R2), H022(L)• Motore PM: H070(R), H071(Ld), H072(Lq)
• Contattore aperto
Al termine dell'autotuning, viene visualizzato il messaggio “PM-Auto-tuning End”.La visualizzazione del messaggio “PM-Autotuning NG” indica un errore:Motore scollegatoMotore troppo grande o troppo piccolo per la potenza nominale dell'inverter.Motore con caratteristiche elettriche insolite (verificare con il produttore); in questo caso le misurazioni risulteranno fuori intervallo.
5-4 Tuning rotativo completoQuesto tipo di autotuning rotativo può essere eseguito solo con il motore noncollegato tramite corde alla cabina dell'ascensore (sposta il motore senza unacoppia completa comportando, pertanto sono presenti alcuni rischi negliascensori molto sbilanciati).Misurerà l'offset del magnete (motori PM) e le grandezze dei motori elettrici(motori PM e IM) senza ruotare il motore (il freno può rimanere chiuso).Quindi, esiste una fase di rotazione del tuning, in cui l'inverter ricercherà lacostante Ke della tensione del motore Ke (per PM), la corrente a vuoto (perIM) e l'inerzia J del sistema del motore (sia per IM sia per PM).Accertarsi che il contattore sul motore sia chiuso (l'inverter metterà in uscitail contattore, ma il sistema di controllo potrebbe disporre di ulteriori condizioni).È necessario utilizzare il freno per il rilascio nella modalità di tuning statico(l'inverter non rilascerà il freno per motivi di sicurezza). Deve essere rilasciatodal sistema di controllo.Gli ingressi di sicurezza GS1 e GS2 devono essere chiusi nel caso in cui siaabilitata la sicurezza.
Passaggi dell'autotuning di rotazione:• Contattore chiuso• Solo PM: stima della posizione statica iniziale del magnete• Sequenza dell'eccitazione della corrente c.c. statica per la ricerca
dei dati elettrici del motore• Motore IM: H020(R1), H021(R2), H022(L)• Motore PM: H070(R), H071(Ld), H072(Lq)
• Fase di rotazione per la ricerca dei dati dinamici del motore• Motore IM: H023(IO), H024(J)• Motore PM: H073(Ke), H074(J)
• Contattore aperto
Autotuning rotativo dinamicoParametro Descrizione Valore
H001 Impostazione autotuning Per motore IM (02: AUT-IM)Per motore PM (04: AUT-PM)
Attiva segnale RUN (premere RUN sul tastierino)

51
Utilizzo del tuning statico Sezione 5-5
Se la fase di tuning rotativo viene interrotta per un errore dovuto a sovracorrenteo sovratensione, provare nuovamente dopo aver ridotto il valore delparametro H005.Al termine dell'autotuning, viene visualizzato il messaggio “PM-Auto-tuning OK”.La visualizzazione del messaggio “PM-Autotuning NG” indica un errore:
• Motore scollegato• Motore troppo grande o troppo piccolo per la potenza nominale
dell'inverter.• Motore con caratteristiche elettriche insolite (verificare con il produttore);
in questo caso le misurazioni risulteranno fuori intervallo.
5-5 Utilizzo del tuning statico
Se si esegue ripetutamente il tuning statico della posizione del magnete,viene visualizzato un numero di offset (P012) simile (con una tolleranza dicirca il 10%). Ma il motore viene spostato di un po' (quando si rilascia il frenomanualmente per 0,5 s, accertarsi che questo si sposti di un po, ma solo dipoco, meno rispetto a una rotazione equivalente dei poli del motore ), ladifferenza rimarrà minima solo in caso di corretta rotazione delle fasi U-V-W.E' circa il 95% delle volte in cui una “verifica manuale” determina che larotazione delle fasi del motore U-V-W e la direzione della rotazionedell'encoder corrispondono.
5-6 Precauzioni sul motore PM
Rischio di smagnetizzazione del motore PM dovuto a corrente troppo alta:Se si utilizza il motore PM, la corrente massima consentita (corrente dismagnetizzazione) del motore PM deve essere superiore al livello disovracorrente dell'inverter. Generalmente, questo parametro supera del200% la corrente nominale del motore, ma ciò dipende dalla progettazionedel produttore.
Motore PM con limitazioni dell'encoder incrementale:È possibile controllare il motore PM utilizzando un semplice encoderincrementale. Tuttavia, al primo avvio dopo l'accensione, vengono applicatele seguenti limitazioni:1. Dopo l'attivazione del comando RUN, si verificherà un ritardo dovuto
all'operazione di rilevamento della posizione dei poli del magnete.2. Poiché la corrente alla stessa coppia aumenta più del normale fino al
momento in cui non viene eseguita una rotazione massima per l'encoder,potrebbe verificarsi, nella peggiore delle ipotesi, un coppia continua del 50%.
La coppia massima in quel caso può diventare, nella peggiore delle ipotesi,il 50% della coppia massima prevista.

52
Precauzioni sul motore PM Sezione 5-6

53
SEZIONE 6Tuning per un funzionamento regolare dell'ascensore
Una volta verificate l'interfaccia e la configurazione dell'unità di controllo, è ilmomento di eseguire il primo avvio. In caso di installazione dell'ascensore, siconsiglia di eseguire un primo avvio in modalità di ispezione per una verifica.A questo punto, se tutto risulta regolare, il motore dovrebbe funzionarecorrettamente nella direzione adeguata.Se la sequenza non parte, la direzione di rotazione è errata (il motore giraregolarmente, ma nella direzione errata oppure si verificano erroridell'encoder al primo movimento, verificare nuovamente le impostazioni finoa questo punto).Se tutto funziona regolarmente, è il momento di effettuare la prima corsastandard dell'ascensore ed eseguire le regolazioni (se necessario) per uncorretto funzionamento.
6-1 Parametro singolo per una rigidità dei controlli
Con le impostazioni del guadagno predefinite, è possibile che all'avvioil motore giri leggermente, per un breve periodo, nella direzione inversarispetto al peso della cabina dell'ascensore. Tale operazione viene definitarollback e viene compensata regolando alcuni parametri dell'anello di controllodella velocità.
L'aumento di questo valore, incrementerà la rigidità generale dei controlliriducendo, pertanto, l'effetto di rollback.Un'impostazione univoca potrebbe risultare non ottimale per tutte le corsedell'ascensore. In tal caso, è necessario impostare separatamente i guadagniper ciascuna sezione di corsa dell'ascensore (vedere la sezione seguente).
Parametro Nome funzione Intervallo di impostazione/contenuto
Valore iniziale
H005 Costante rigidità, primo motore
0,1… 5.000,0 (%) 100,0
H005 troppo alto Impostazioni H005 corretteAlta velocità Bassa velocità Alta velocità Bassa velocità Alta velocità Bassa velocità
H005 troppo basso

54
Impostazione del parametro di inerzia (se non è possibile regolare l'autotuning rotativo) Sezione 6-2
6-2 Impostazione del parametro di inerzia (se non è possibile regolare l'autotuning rotativo)
H074 (Motore PM) o H024 (Motore IM) è l'aggiunta di inerzia del motore + ilriflesso dell'inerzia di sollevamento sull'albero motore. Ciò introduce untermine feedforward proporzionale alle fasi di accelerazione e decelerazione. Questo parametro può essere riscontrato dall'inverter in una fase di autotuningrotativo.Qualora non fosse possibile eseguire un tuning rotativo, è possibile eseguireuna regolazione manuale aumentando o diminuendo il parametro in base allarisposta del motore durante lo spostamento dell'ascensore:
6-3 Impostazioni dei singoli guadagni durante le sezioni di corsa dell'ascensore
Qualora l'impostazione generale non fosse sufficiente a regolare l'interaqualità della corsa dell'ascensore, potrebbe essere necessario regolareseparatamente tutte le parti della corsa dell'ascensore.
Alta velocità Bassa velocità Alta velocità Bassa velocità Alta velocità Bassa velocità
Impostazioni inerzia del motore troppo basse (sovraelongazione)
Impostazioni inerzia del motore troppo alte (sovracompensazione)
Impostazioni inerzia del motore corrette
Para-metro Nome funzione
Intervallo di impostazione/
contenuto
Valore iniziale Note
H005 Costante rigidità, primo motore
0,1… 5.000,0 (%) 100,0 Per il secondo motore: H205
H007 Velocità di commutazione guadagno ASR
0,00… 400,00 (Hz) 0,00
H008 Guadagno proporzionale ASR all'avvio
0,0… 1.000,0 (%) 100,0
H009 Guadagno integrale ASR all'avvio
0,0… 1.000,0 (%) 100,0
H010 Guadagno proporzionale ASR dopo la commutazione
0,0… 1.000,0 (%) 100,0
H011 Guadagno integrale ASR dopo la commutazione
0,0… 1.000,0 (%) 100,0
H012 Guadagno proporzionale ASR a velocità zero
0,0… 1.000,0 (%) 100,0
H013 Guadagno integrale ASR a velocità zero
0,0… 1.000,0 (%) 100,0

55
Guadagno di posizione per ad anello chiuso all'avvio e all'arresto (solo ad anello chiuso) Sezione 6-4
Aumentare il tempo di risposta degli anelli di controllo (incrementare il termineintegrale) oppure aumentare il guadagno proporzionale per una migliorecorrezione.In caso di un problema dovuto a vibrazioni eccessive in alcune aree, ridurrei guadagni in quelle aree. Modificare un parametro alla volta.Il guadagno di posizione (punto successivo) inciderà anche sulle sezionidi mantenimento della velocità zero.
6-4 Guadagno di posizione per ad anello chiuso all'avvio e all'arresto (solo ad anello chiuso)
Nel controllo ad anello chiuso di entrambi i motori IM e PM, l'inverter eseguiràun controllo della posizione ad anello chiuso per raggiungere la sezione divelocità zero all'inizio e alla fine.
Simile ai guadagni dell'anello di velocità. Un guadagno di posizione troppoelevato causerà errori di vibrazione durante le sezioni di mantenimento dellavelocità zero.
Regolazione guadagno ASR e guadagno anello di posizione
A093 A094A096 A097
Tempo
H007
H008
H012
H010H009H013
H011
H014
H015
H016P032
Velocità di uscita
Comando Up/DownSegnale di controllo
freno (BRK)
Guadagno ASR P
Guadagno ASR I
Guadagno anello di posizione
Para-metro Nome funzione Intervallo di
impostazione/contenutoValore iniziale Note
P032 Impostazione guadagno anello di posizione
0,00… 100,00 0,50
Alta velocità Bassa velocità
A096 A097Area di controllo della posizione a velocità zero (grassetto) solo nel controllo ad anello chiuso.
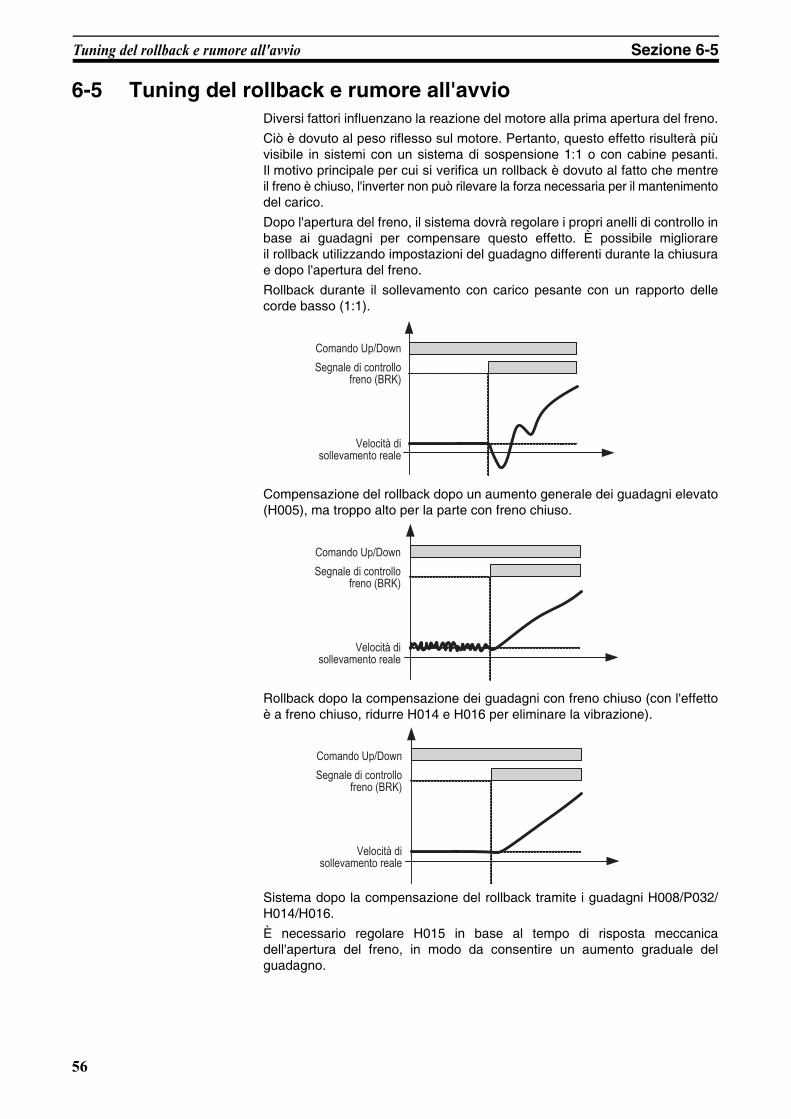
56
Tuning del rollback e rumore all'avvio Sezione 6-5
6-5 Tuning del rollback e rumore all'avvioDiversi fattori influenzano la reazione del motore alla prima apertura del freno.Ciò è dovuto al peso riflesso sul motore. Pertanto, questo effetto risulterà piùvisibile in sistemi con un sistema di sospensione 1:1 o con cabine pesanti.Il motivo principale per cui si verifica un rollback è dovuto al fatto che mentreil freno è chiuso, l'inverter non può rilevare la forza necessaria per il mantenimentodel carico.Dopo l'apertura del freno, il sistema dovrà regolare i propri anelli di controllo inbase ai guadagni per compensare questo effetto. È possibile migliorareil rollback utilizzando impostazioni del guadagno differenti durante la chiusurae dopo l'apertura del freno.Rollback durante il sollevamento con carico pesante con un rapporto dellecorde basso (1:1).
Compensazione del rollback dopo un aumento generale dei guadagni elevato(H005), ma troppo alto per la parte con freno chiuso.
Rollback dopo la compensazione dei guadagni con freno chiuso (con l'effettoè a freno chiuso, ridurre H014 e H016 per eliminare la vibrazione).
Sistema dopo la compensazione del rollback tramite i guadagni H008/P032/H014/H016. È necessario regolare H015 in base al tempo di risposta meccanicadell'apertura del freno, in modo da consentire un aumento graduale delguadagno.
Comando Up/Down
Velocità di sollevamento reale
Segnale di controllo freno (BRK)
Comando Up/Down
Velocità di sollevamento reale
Segnale di controllo freno (BRK)
Comando Up/Down
Velocità di sollevamento reale
Segnale di controllo freno (BRK)

57
Compensazione delle celle di carico all'avvio Sezione 6-6
Generalmente, i guadagni durante la frenata (H014: velocità e H016:posizione) saranno inferiori per evitare vibrazioni e i guadagni dopo l'aperturadel freno (H008: velocità e P032: posizione).
6-6 Compensazione delle celle di carico all'avvioPer una perfetta eliminazione del rollback, la compensazione di coppia tramitecella di carico rappresenta la soluzione migliore. Dal momento che questa misuraeffettivamente il carico all'interno della cabina e l'inverter emetterà la coppiagiusta per il mantenimento del carico all'apertura del freno senza rollback.La regolazione è semplice:Impostare l'intervallo di misura della cella di carico utilizzando b052 e b053(rappresentano i valori di ingresso analogico corrispondenti per il pesominimo e il peso massimo).Quindi, calibrare la compensazione richiesta per ciascun caso estremo, sia versol'alto sia verso il basso (4 impostazioni). Generalmente, si tratta di impostazionisimmetriche verso l'alto e verso il basso, b054 = b056 e b055 = b057.L'impostazione tipica di b051 è 00 (valore del peso del blocco quando vieneattivato il comando Up/Down).
Para-metro Nome funzione Intervallo di
impostazione/contenutoValore iniziale Note
H014 Guadagno proporzionale ASR alla frenata
0,0… 1.000,0 (%) 100,0
H015 Guadagno proporzionale ASR all'impostazione del tempo di dissolvenza del freno
0,01… 5,00 (s) 0,01
H016 Impostazione guadagno anello di posizione alla frenata
0,00… 100,00 0,50
Para-metro Nome funzione Intervallo di impostazione/
contenutoValore iniziale
b050 Selezione polarizzazione di coppia
00: O (ingresso O-L) 0201: OI (ingresso OI-L)02: O2 (ingresso O2-L)
b051 Selezione trigger blocco polarizzazione di coppia
00: RUN (il comando RUN è attivo) 0001: TCL (il terminale “TCL” è ON)
b052 Calibrazione cella di carico al min.
0… 100 (%) 0
b053 Calibrazione cella di carico al max.
0… 100 (%) 100
b054 Valore di polarizzazione regolazione cella di carico al min. Verso l'alto
–300,0… 300,0 (%) 0
b055 Valore di polarizzazione regolazione cella di carico al max. Verso l'alto
–300,0… 300,0 (%) 0
b056 Valore di polarizzazione regolazione cella di carico al min. Verso il basso
–300,0… 300,0 (%) 0
b057 Valore di polarizzazione regolazione cella di carico al max. Verso il basso
–300,0… 300,0 (%) 0
b058 Costante di tempo filtro di polarizzazione della coppia
Da 5 a 500 (ms) 10
b059 Impostazione livello di dissolvenza compensazione di coppia
0,00… 400,00 (Hz) 0,00
b060 Impostazione tempo di dissolvenza compensazione di coppia
0,01… 5,00 (s) 0,01
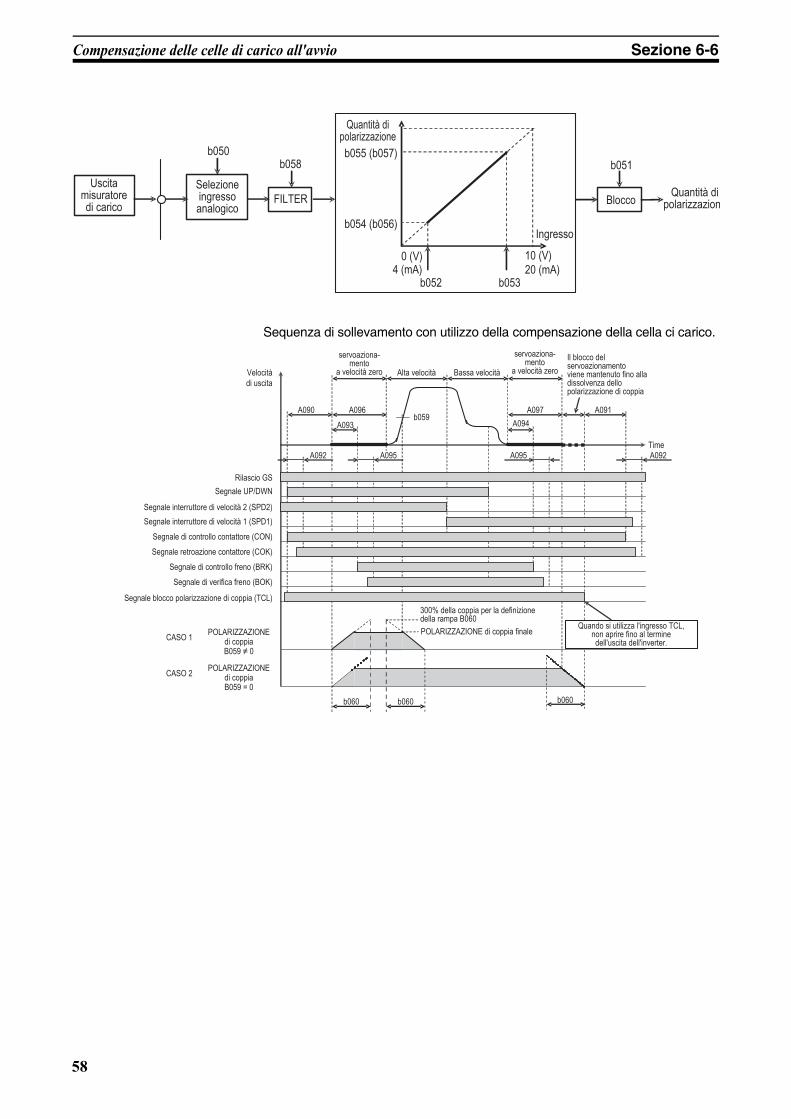
58
Compensazione delle celle di carico all'avvio Sezione 6-6
Sequenza di sollevamento con utilizzo della compensazione della cella ci carico.
FILTER
b050b058
0 (V)4 (mA)
10 (V)20 (mA)
b055 (b057)
b054 (b056)
b053b052
Ingresso
Blocco
b051Uscita
misuratoredi carico
Selezione ingresso analogico
Quantità di polarizzazione
Quantità di polarizzazion
A093 A094A096 A097
Segnale UP/DWN
Segnale di controllo freno (BRK)
Segnale di verifica freno (BOK)
A095 A095Time
A090 A091
A092 A092
Segnale di controllo contattore (CON)
Segnale retroazione contattore (COK)
Rilascio GS
Segnale interruttore di velocità 2 (SPD2)Segnale interruttore di velocità 1 (SPD1)
b060
300% della coppia per la definizionedella rampa B060
b060
b059
Segnale blocco polarizzazione di coppia (TCL)
CASO 2
CASO 1
b060
POLARIZZAZIONE di coppia finale
Velocità di uscita
POLARIZZAZIONE di coppiaB059 ≠ 0
POLARIZZAZIONE di coppiaB059 = 0
Quando si utilizza l'ingresso TCL, non aprire fino al termine dell'uscita dell'inverter.
Il blocco del servoazionamento viene mantenuto fino alla dissolvenza dello polarizzazione di coppia
servoaziona-mento
a velocità zero
servoaziona-mento
a velocità zero Alta velocità Bassa velocità
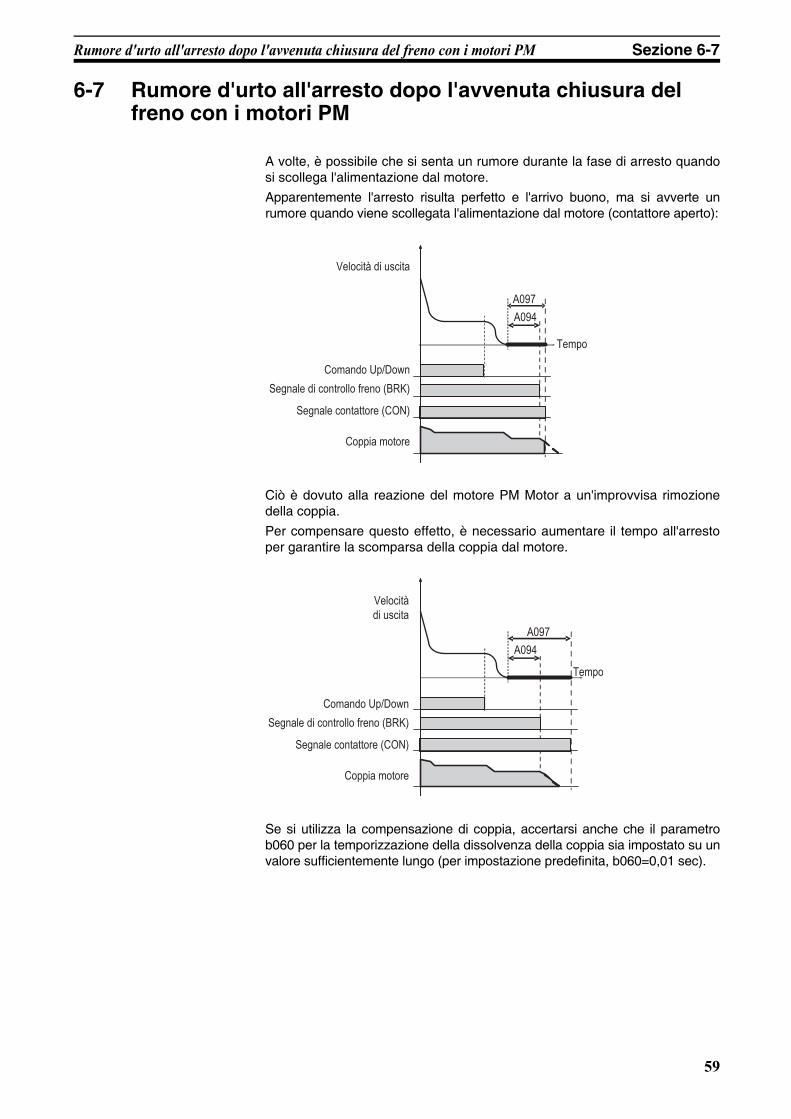
59
Rumore d'urto all'arresto dopo l'avvenuta chiusura del freno con i motori PM Sezione 6-7
6-7 Rumore d'urto all'arresto dopo l'avvenuta chiusura del freno con i motori PM
A volte, è possibile che si senta un rumore durante la fase di arresto quandosi scollega l'alimentazione dal motore.Apparentemente l'arresto risulta perfetto e l'arrivo buono, ma si avverte unrumore quando viene scollegata l'alimentazione dal motore (contattore aperto):
Ciò è dovuto alla reazione del motore PM Motor a un'improvvisa rimozionedella coppia.Per compensare questo effetto, è necessario aumentare il tempo all'arrestoper garantire la scomparsa della coppia dal motore.
Se si utilizza la compensazione di coppia, accertarsi anche che il parametrob060 per la temporizzazione della dissolvenza della coppia sia impostato su unvalore sufficientemente lungo (per impostazione predefinita, b060=0,01 sec).
A094A097
Tempo
Comando Up/DownSegnale di controllo freno (BRK)
Segnale contattore (CON)
Coppia motore
Velocità di uscita
A094A097
Comando Up/DownSegnale di controllo freno (BRK)
Tempo
Segnale contattore (CON)
Coppia motore
Velocità di uscita

60
Rumore d'urto all'arresto dopo l'avvenuta chiusura del freno con i motori PM Sezione 6-7

61
SEZIONE 7Altre funzioni per ascensori
7-1 Piano rapido
Abilitando questa funzione, è possibile ridurre al massimo l'avvicinamentodell'ascensore al piano anche in caso in cui si verifichi un segnale dilivellamento (slittamento) prima del raggiungimento della velocità massima.Disabilitando questa funzione, la distanza di arresto viene stabilita generalmentein base alla velocità e alla decelerazione selezionate e regolata su un blocconormale affinché vengano mantenuti tempi bassi per la bassa velocità:
Tuttavia, se il segnale di bassa velocità appare troppo presto (per la cosiddettafunzione “piano breve”), la velocità lenta diventa troppo lunga (in quanto ladistanza all'avvio è la stessa).Quando è abilitata la funzione Piano rapido, tale tempo viene ottimizzatoricalcolando un profilo che corrisponda alla distanza di arresto “A” con la velocitàlenta ridotta al minino.A seconda dei tempi di ricezione del segnale, sarà possibile mantenere ilparametro A113 “Tempo velocità costante” (che facilita il comfort) oppure sarànecessario ridurlo gradualmente insieme anche al tempo di decelerazione perdare priorità alla distanza.
CASO DI CORSA ASCENSORE STANDARD
VELOCITÀ SELEZIONATA
VELOCITÀ LENTA
QUALSIASI VELOCITÀ SELEZIONATA
A
LENTA
QUASI LENTA SENZA FUNZIONE RAPIDO AL PIANO
VELOCITÀ SELEZIONATA
VELOCITÀ LENTA
LENTA
A
QUALSIASIVELOCITÀ
Solle
vam
ento
di p
rofo
ndità
Acc.
norm
ale
Dec. normale
Veloc
ità d
i soll
evam
ento

62
Piano rapido Sezione 7-1
VELOCITÀ OTTIMIZZATA CALCOLATA
VELOCITÀ SELEZIONATA
VELOCITÀ LENTA
LENTA
AVeloc
ità d
i soll
evam
ento
A113
VELOCITÀ SELEZIONATA
VELOCITÀ LENTA
LENTA
AVeloc
ità d
i soll
evam
ento
Veloc
ità d
i soll
evam
ento
<A113 VELOCITÀ OTTIMIZZATA CALCOLATA
VELOCITÀ SELEZIONATA
VELOCITÀ LENTA
LENTA
A
Nessuna velocità cf. VELOCITÀ OTTIMIZZATA CALCOLATA
CORSA ASCENSORE PIANO BREVE, CASO 1(miglior caso di richiesta di velocità lenta)
CORSA ASCENSORE PIANO BREVE, CASO 2(velocità lenta tardi)
CORSA ASCENSORE PIANO BREVE, CASO 3(velocità lenta troppo tardi)
QUALSIASI VELOCITÀ
QUALSIASI VELOCITÀ
QUALSIASI VELOCITÀ
In questo caso, è possibile riscontrare una velocità ottimizzata rispettando il tempo desiderato alla velocità costante A113 e rispettando i valori normali di decelerazione e movimento a strappi
Norm
alAcc
Norm
alAcc
Norm
alAcc
NormalDec
NormalDec
Movimento
a strappi/dec. modificata
In questo caso, non è possibile riscontrare una velocità ottimizzata rispettando il tempo desiderato alla velocità costante A113, ma è possibile rispettare i valori normali di decelerazione e movimento a strappi AZIONE: ridurre il tempo desiderato alla velocità costante
In questo caso, non è possibile a volte riscontrare una velocità ottimizzata alla velocità costante e non è neanche possibile rispettare le caratteristiche originali di accelerazione, decelerazione e movimento a strappiAZIONE: Nessun tempo alla velocità ottimizzata e movimento a strappi e l'accelerazione sono estesi al valore che rispetta la distanza A. La priorità dell'ascensore è sempre quella di non causare un overrun. Se al produttore dell'ascensore ciò non piace, deve riconoscere la condizione di piano breve durante il riconoscimento della chiamata al piano...

63
Trasporto passeggeri di emergenza Sezione 7-2
7-2 Trasporto passeggeri di emergenza
Questa funzione consente il funzionamento dell'ascensore con una tensionedi alimentazione speciale in condizioni di black-out. È necessario chel'alimentazione di emergenza sia collegata al sistema.L'interesse dell'inverter nel disporre di questa modalità è che, in questo modo,accetterà i livelli di alimentazione di tensione non consentiti durante il funzionamentonormale, ma utili per creare una soluzione di emergenza economica.
7-2-1 Cablaggio di emergenza
Parametro Nome funzione Intervallo di impostazione/contenuto
Valore iniziale Note
A111 Selezione Piano rapido 00: Disabilitato 0001: Abilitato
A113 Tempo minimo velocità costante
0,0… 2,0 (s) 0,0
A114 Guadagno tempo di accelerazione calcolo della distanza
50,0… 200,0 (%) 100,0
A115 Guadagno tempo di decelerazione calcolo della distanza
50,0… 200,0 (%) 100,0
R (L1)
S (L2)
T (L3)
R0
T0
CM1
P24
PLC
3G3LX
(Emergenza)
3 A
EMP
Gruppo dicontinuità
Gruppo di continuità
UP
DOWN
UPS per alimentazioneAlimentazione batteria
48… 600 Vc.c.
200... 240 V monofase
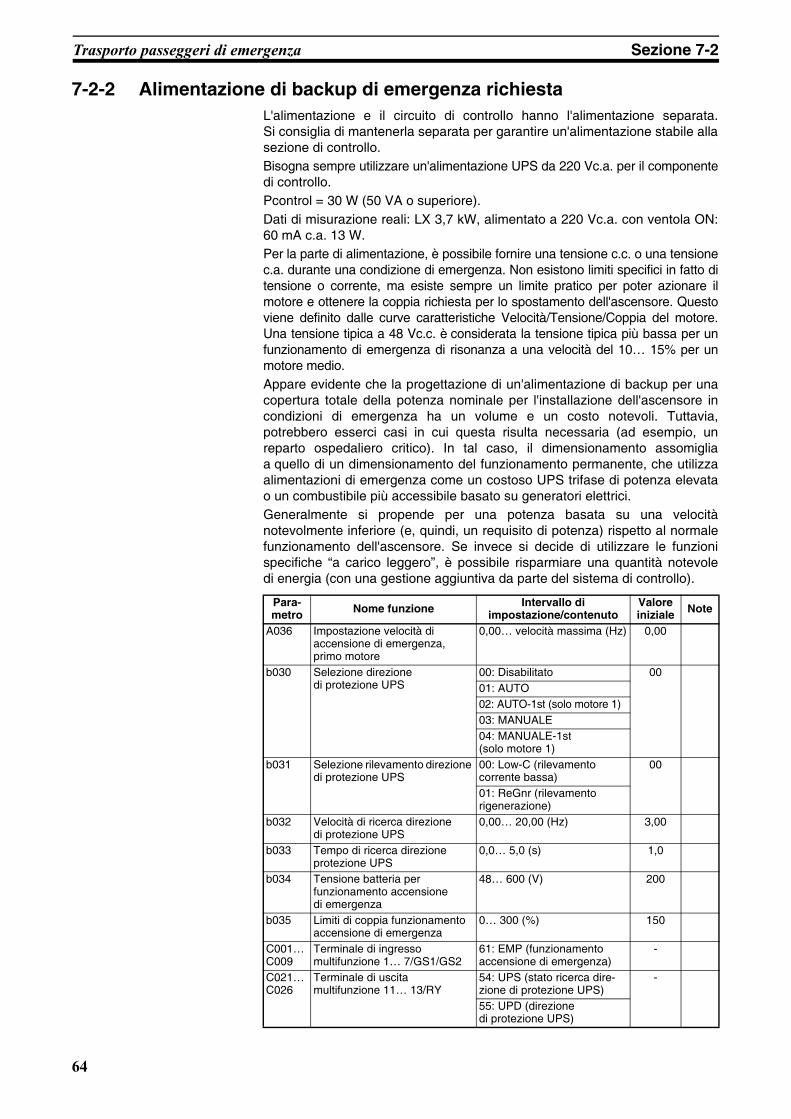
64
Trasporto passeggeri di emergenza Sezione 7-2
7-2-2 Alimentazione di backup di emergenza richiestaL'alimentazione e il circuito di controllo hanno l'alimentazione separata.Si consiglia di mantenerla separata per garantire un'alimentazione stabile allasezione di controllo.Bisogna sempre utilizzare un'alimentazione UPS da 220 Vc.a. per il componentedi controllo.Pcontrol = 30 W (50 VA o superiore).Dati di misurazione reali: LX 3,7 kW, alimentato a 220 Vc.a. con ventola ON:60 mA c.a. 13 W.Per la parte di alimentazione, è possibile fornire una tensione c.c. o una tensionec.a. durante una condizione di emergenza. Non esistono limiti specifici in fatto ditensione o corrente, ma esiste sempre un limite pratico per poter azionare ilmotore e ottenere la coppia richiesta per lo spostamento dell'ascensore. Questoviene definito dalle curve caratteristiche Velocità/Tensione/Coppia del motore.Una tensione tipica a 48 Vc.c. è considerata la tensione tipica più bassa per unfunzionamento di emergenza di risonanza a una velocità del 10… 15% per unmotore medio.Appare evidente che la progettazione di un'alimentazione di backup per unacopertura totale della potenza nominale per l'installazione dell'ascensore incondizioni di emergenza ha un volume e un costo notevoli. Tuttavia,potrebbero esserci casi in cui questa risulta necessaria (ad esempio, unreparto ospedaliero critico). In tal caso, il dimensionamento assomigliaa quello di un dimensionamento del funzionamento permanente, che utilizzaalimentazioni di emergenza come un costoso UPS trifase di potenza elevatao un combustibile più accessibile basato su generatori elettrici.Generalmente si propende per una potenza basata su una velocitànotevolmente inferiore (e, quindi, un requisito di potenza) rispetto al normalefunzionamento dell'ascensore. Se invece si decide di utilizzare le funzionispecifiche “a carico leggero”, è possibile risparmiare una quantità notevoledi energia (con una gestione aggiuntiva da parte del sistema di controllo).
Para-metro Nome funzione Intervallo di
impostazione/contenutoValore iniziale Note
A036 Impostazione velocità di accensione di emergenza, primo motore
0,00… velocità massima (Hz) 0,00
b030 Selezione direzione di protezione UPS
00: Disabilitato 0001: AUTO02: AUTO-1st (solo motore 1)03: MANUALE04: MANUALE-1st (solo motore 1)
b031 Selezione rilevamento direzione di protezione UPS
00: Low-C (rilevamento corrente bassa)
00
01: ReGnr (rilevamento rigenerazione)
b032 Velocità di ricerca direzione di protezione UPS
0,00… 20,00 (Hz) 3,00
b033 Tempo di ricerca direzione protezione UPS
0,0… 5,0 (s) 1,0
b034 Tensione batteria per funzionamento accensione di emergenza
48… 600 (V) 200
b035 Limiti di coppia funzionamento accensione di emergenza
0… 300 (%) 150
C001… C009
Terminale di ingresso multifunzione 1… 7/GS1/GS2
61: EMP (funzionamento accensione di emergenza)
-
C021… C026
Terminale di uscita multifunzione 11… 13/RY
54: UPS (stato ricerca dire-zione di protezione UPS)
-
55: UPD (direzione di protezione UPS)
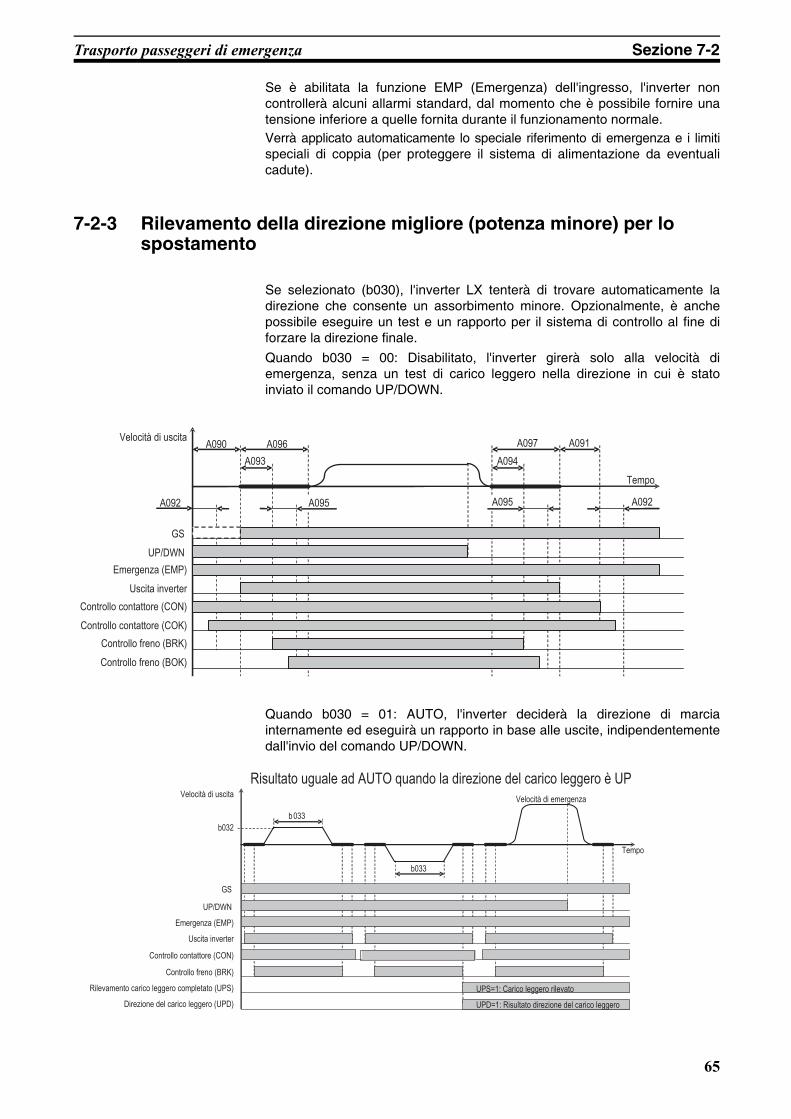
65
Trasporto passeggeri di emergenza Sezione 7-2
Se è abilitata la funzione EMP (Emergenza) dell'ingresso, l'inverter noncontrollerà alcuni allarmi standard, dal momento che è possibile fornire unatensione inferiore a quelle fornita durante il funzionamento normale.Verrà applicato automaticamente lo speciale riferimento di emergenza e i limitispeciali di coppia (per proteggere il sistema di alimentazione da eventualicadute).
7-2-3 Rilevamento della direzione migliore (potenza minore) per lo spostamento
Se selezionato (b030), l'inverter LX tenterà di trovare automaticamente ladirezione che consente un assorbimento minore. Opzionalmente, è anchepossibile eseguire un test e un rapporto per il sistema di controllo al fine diforzare la direzione finale.Quando b030 = 00: Disabilitato, l'inverter girerà solo alla velocità diemergenza, senza un test di carico leggero nella direzione in cui è statoinviato il comando UP/DOWN.
Quando b030 = 01: AUTO, l'inverter deciderà la direzione di marciainternamente ed eseguirà un rapporto in base alle uscite, indipendentementedall'invio del comando UP/DOWN.
A093 A094A096 A097A090 A091
Tempo
A095 A095 A092
UP/DWN
Controllo freno (BRK)
Velocità di uscita
Controllo contattore (CON)
GS
Emergenza (EMP)
Uscita inverter
Controllo freno (BOK)
Controllo contattore (COK)
A092
Risultato uguale ad AUTO quando la direzione del carico leggero è UP
UP/DWN
Controllo freno (BRK)
Velocità di uscita
Controllo contattore (CON)
Tempo
GS
Rilevamento carico leggero completato (UPS)
Direzione del carico leggero (UPD)
b033
UPD=1: Risultato direzione del carico leggero UPS=1: Carico leggero rilevato
b033
b032
Velocità di emergenza
Emergenza (EMP)
Uscita inverter

66
Controllo della posizione Sezione 7-3
Quando b030 = 03: MANUAL, l'inverter eseguirà il test di carico leggero e unrapporto in base alle uscite, ma imporrà la direzione comandata dagli ingressi.Per questa modalità, i due ingressi UP/DOWN devono essere impostaticontemporaneamente e solo uno di essi deve essere rimosso dopo larestituzione del risultato da parte dell'inverter.
7-3 Controllo della posizioneL'inverter LX può controllare la posizione direttamente in base al processo interno.Posizionamento relativo (segnale “vicino al piano” obbligatorio) e assoluto(nessun sensore richiesto).Il parametro A045 consente di abilitare il metodo di controllo della posizione.
Risultato uguale ad AUTO quando la direzione del carico leggero è DOWN
UP/DWN
Controllo freno (BRK)
Velocità di uscita
Controllo contattore (CON)
GS
Rilevamento carico leggero completato (UPS)Direzione del carico leggero (UPD)
b032
Emergenza (EMP)
Uscita inverter
Velocità di emergenza
Tempob033
b033
UPD=0: Risultato direzione del carico leggero
UPS=1: Carico leggero rilevato
DWN
Controllo freno (BRK)
Velocità di uscita
Controllo contattore (CON)
GS
Rilevamento carico leggero completato (UPS)Direzione del carico leggero (UPD)
b032
Emergenza (EMP)
Uscita inverter
UP
UPD=1: Risultato direzione del carico leggero
UPS=1: Carico leggero rilevato
Avvio funzionamento di emergenzaVelocità di emergenza
Tempo
b033
b033
Para-metro Nome funzione Intervallo di
impostazione/contenutoValore iniziale Note
A045 Impostazione modalità sequenza di sollevamento, primo motore
00: SPD (modalità di controllo della velocità)
00 Per il secondo controllo:
A24501: DP1 (modalità posizione diretta 1 con segnale di livellamento)02: DP2 (modalità posizione diretta 2 con segnale di livellamento)

67
Controllo della posizione Sezione 7-3
La sequenza è fondamentalmente la stessa, ma differisce per l'assenza dimodifiche alla velocità di riferimento. Il posizionamento porta l'ascensoredirettamente al piano.Con A045 = 01 (DP1: modalità Posizione relativa), è richiesto un segnale dilivellamento per eseguire il trigger in modalità di controllo della posizione. Iregistri di posizione diventano la distanza di arresto.
Con A045 = 02 (DP2: modalità Posizione assoluta), tutti i piani dispongonodi una posizione assoluta specifica.
Velocità di uscita
Vicino al piano (NFS)
Segnale livellamento (LVS)
Rilascio GS
UP/DWN
Segnale velocità
Uscita inverter
Controllo contattore (CON)
Verifica contattore (COK)
Controllo freno (BRK)
Controllo freno (BOK)
Contatore posizione
A090 A096 A097 A091
Distanza di arresto
A094A093
A092 A095 A092A095
Tempo
Velocità di uscita
Modifica posizione di riferimento
Distanza di arresto
Tempo
Comando di posizione
Rilascio GS
UP/DWN
Segnale velocità
Uscita inverter
Controllo contattore (CON)
Verifica contattore (COK)
Controllo freno (BRK)
Controllo freno (BOK)
Contatore posizione
POS2POS1
A090
A092 A092A095 A095
A096 A097
A094A093
A091
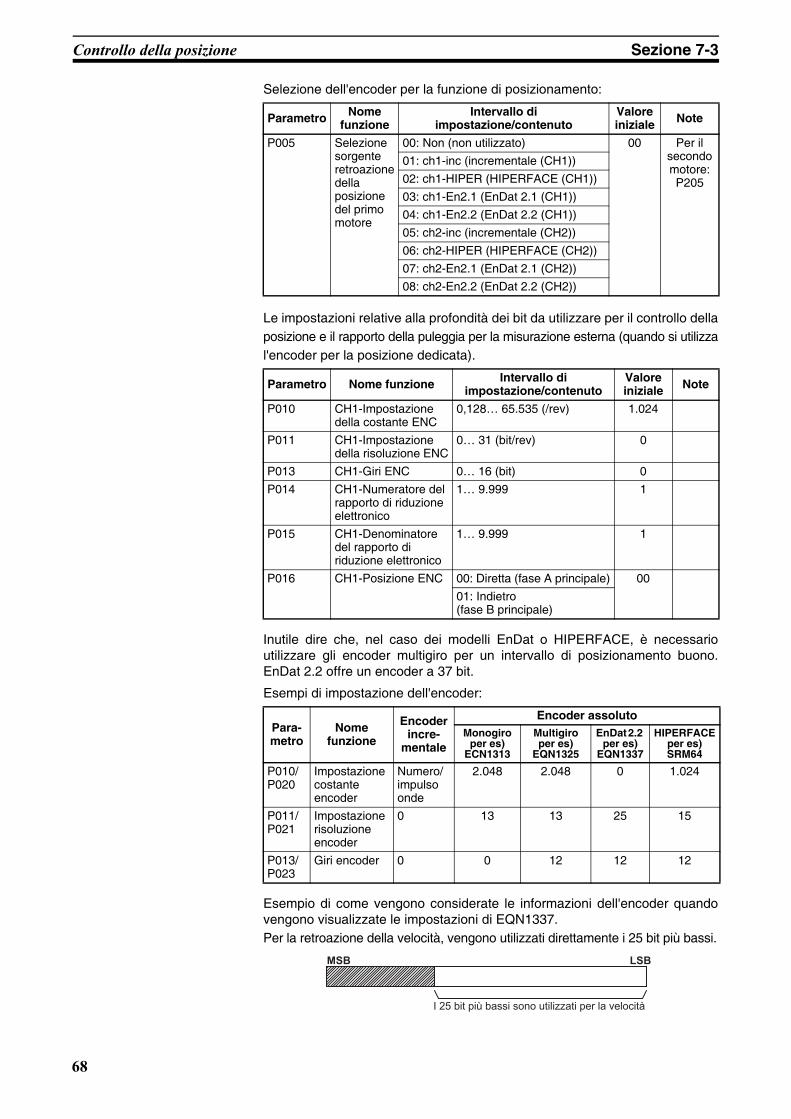
68
Controllo della posizione Sezione 7-3
Selezione dell'encoder per la funzione di posizionamento:
Le impostazioni relative alla profondità dei bit da utilizzare per il controllo dellaposizione e il rapporto della puleggia per la misurazione esterna (quando si utilizzal'encoder per la posizione dedicata).
Inutile dire che, nel caso dei modelli EnDat o HIPERFACE, è necessarioutilizzare gli encoder multigiro per un intervallo di posizionamento buono.EnDat 2.2 offre un encoder a 37 bit.
Esempi di impostazione dell'encoder:
Esempio di come vengono considerate le informazioni dell'encoder quandovengono visualizzate le impostazioni di EQN1337.Per la retroazione della velocità, vengono utilizzati direttamente i 25 bit più bassi.
Parametro Nome funzione
Intervallo di impostazione/contenuto
Valore iniziale Note
P005 Selezione sorgente retroazione della posizione del primo motore
00: Non (non utilizzato) 00 Per il secondo motore: P205
01: ch1-inc (incrementale (CH1))02: ch1-HIPER (HIPERFACE (CH1))03: ch1-En2.1 (EnDat 2.1 (CH1))04: ch1-En2.2 (EnDat 2.2 (CH1))05: ch2-inc (incrementale (CH2))06: ch2-HIPER (HIPERFACE (CH2))07: ch2-En2.1 (EnDat 2.1 (CH2))08: ch2-En2.2 (EnDat 2.2 (CH2))
Parametro Nome funzione Intervallo di impostazione/contenuto
Valore iniziale Note
P010 CH1-Impostazione della costante ENC
0,128… 65.535 (/rev) 1.024
P011 CH1-Impostazione della risoluzione ENC
0… 31 (bit/rev) 0
P013 CH1-Giri ENC 0… 16 (bit) 0P014 CH1-Numeratore del
rapporto di riduzione elettronico
1… 9.999 1
P015 CH1-Denominatore del rapporto di riduzione elettronico
1… 9.999 1
P016 CH1-Posizione ENC 00: Diretta (fase A principale) 0001: Indietro (fase B principale)
Para-metro
Nome funzione
Encoder incre-
mentale
Encoder assolutoMonogiro
per es) ECN1313
Multigiro per es)
EQN1325
EnDat 2.2 per es)
EQN1337
HIPERFACE per es) SRM64
P010/P020
Impostazione costante encoder
Numero/ impulso onde
2.048 2.048 0 1.024
P011/P021
Impostazione risoluzione encoder
0 13 13 25 15
P013/P023
Giri encoder 0 0 12 12 12
MSB LSB
I 25 bit più bassi sono utilizzati per la velocità

69
Controllo della posizione Sezione 7-3
Per il calcolo della posizione, i 5 bit più bassi vengono tralasciati in quantoviene registrata la posizione a 32 bit.
Il layout normale è che viene utilizzato l'encoder esterno al motore per il posi-zionamento. Esempio di un sistema di misurazione esterno (sorgente Kübler):Il motivo è che questo sistema non dipenderà dallo scorrimento della puleggiadel motore o dall'estensione delle corde.
Nel caso in venga utilizzato lo stesso encoder nel motore (opzione nonconsigliata), è necessario accertarsi che non si verifichi o che venga ridotto alminimo lo scorrimento nelle corde (generalmente, ciò è possibile solo nelleinstallazioni con un numero ridotto di piani).
LSB MSB
I 5 bit meno significativi vengono tralasciati per ottenere la risoluzione a 32 bit più alta per la posizione, ma senza overrange.
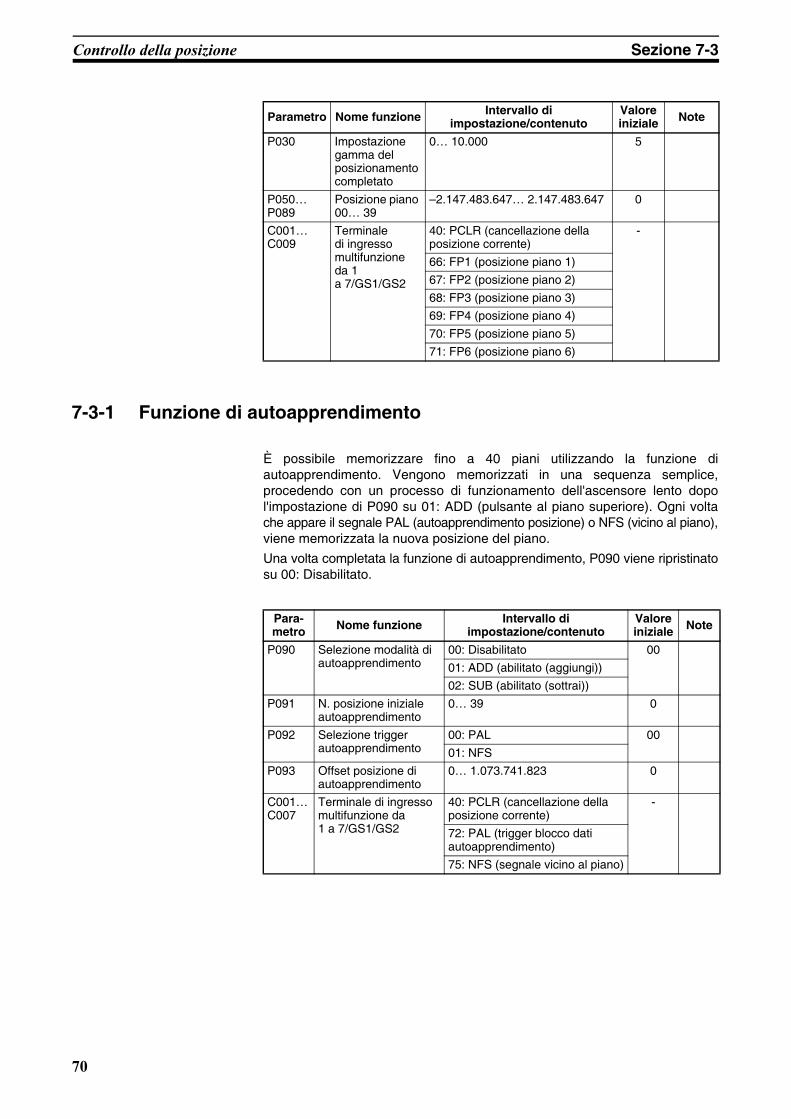
70
Controllo della posizione Sezione 7-3
7-3-1 Funzione di autoapprendimento
È possibile memorizzare fino a 40 piani utilizzando la funzione diautoapprendimento. Vengono memorizzati in una sequenza semplice,procedendo con un processo di funzionamento dell'ascensore lento dopol'impostazione di P090 su 01: ADD (pulsante al piano superiore). Ogni voltache appare il segnale PAL (autoapprendimento posizione) o NFS (vicino al piano),viene memorizzata la nuova posizione del piano.Una volta completata la funzione di autoapprendimento, P090 viene ripristinatosu 00: Disabilitato.
Parametro Nome funzione Intervallo di impostazione/contenuto
Valore iniziale Note
P030 Impostazione gamma del posizionamento completato
0… 10.000 5
P050… P089
Posizione piano 00… 39
–2.147.483.647… 2.147.483.647 0
C001… C009
Terminale di ingresso multifunzione da 1 a 7/GS1/GS2
40: PCLR (cancellazione della posizione corrente)
-
66: FP1 (posizione piano 1)67: FP2 (posizione piano 2)68: FP3 (posizione piano 3)69: FP4 (posizione piano 4)70: FP5 (posizione piano 5)71: FP6 (posizione piano 6)
Para-metro Nome funzione Intervallo di
impostazione/contenutoValore iniziale Note
P090 Selezione modalità di autoapprendimento
00: Disabilitato 0001: ADD (abilitato (aggiungi))02: SUB (abilitato (sottrai))
P091 N. posizione iniziale autoapprendimento
0… 39 0
P092 Selezione trigger autoapprendimento
00: PAL 0001: NFS
P093 Offset posizione di autoapprendimento
0… 1.073.741.823 0
C001… C007
Terminale di ingresso multifunzione da 1 a 7/GS1/GS2
40: PCLR (cancellazione della posizione corrente)
-
72: PAL (trigger blocco dati autoapprendimento)75: NFS (segnale vicino al piano)
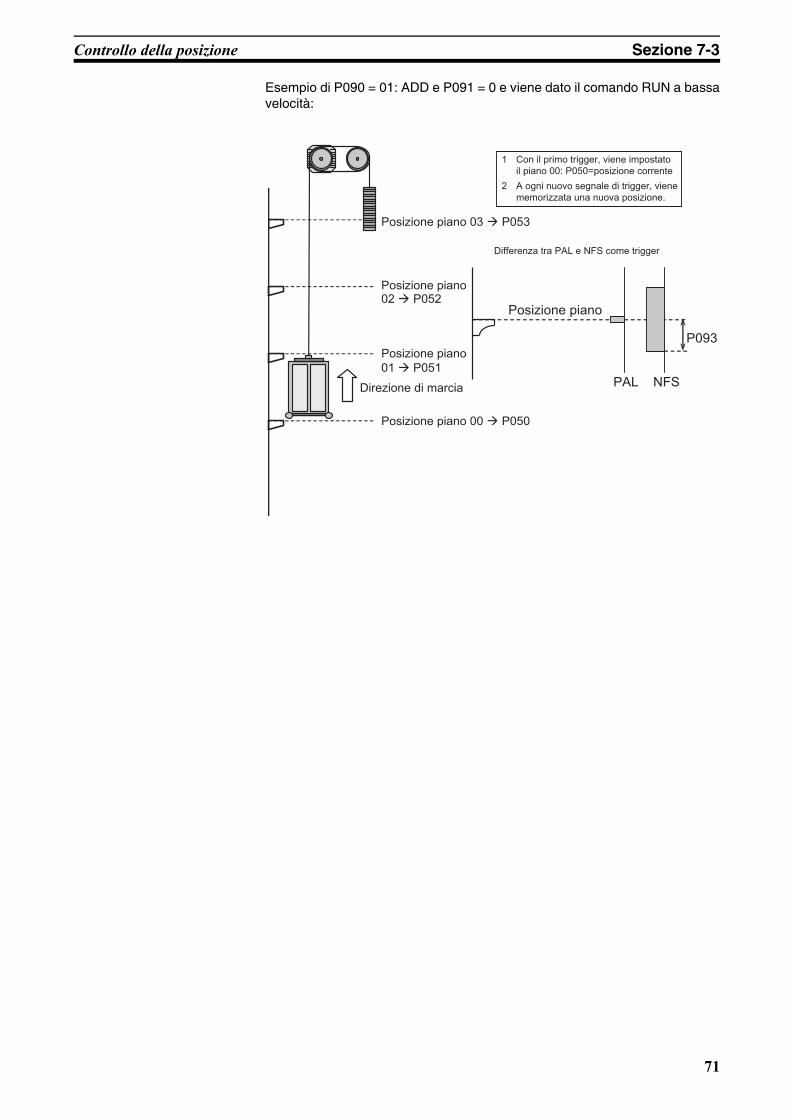
71
Controllo della posizione Sezione 7-3
Esempio di P090 = 01: ADD e P091 = 0 e viene dato il comando RUN a bassavelocità:
Direzione di marcia
Posizione piano 03 P053
Posizione piano 02 P052
Posizione piano 01 P051
Posizione piano 00 P050
PAL NFS
P093
Posizione piano
Differenza tra PAL e NFS come trigger
1 Con il primo trigger, viene impostato il piano 00: P050=posizione corrente
2 A ogni nuovo segnale di trigger, viene memorizzata una nuova posizione.

72
Controllo della posizione Sezione 7-3
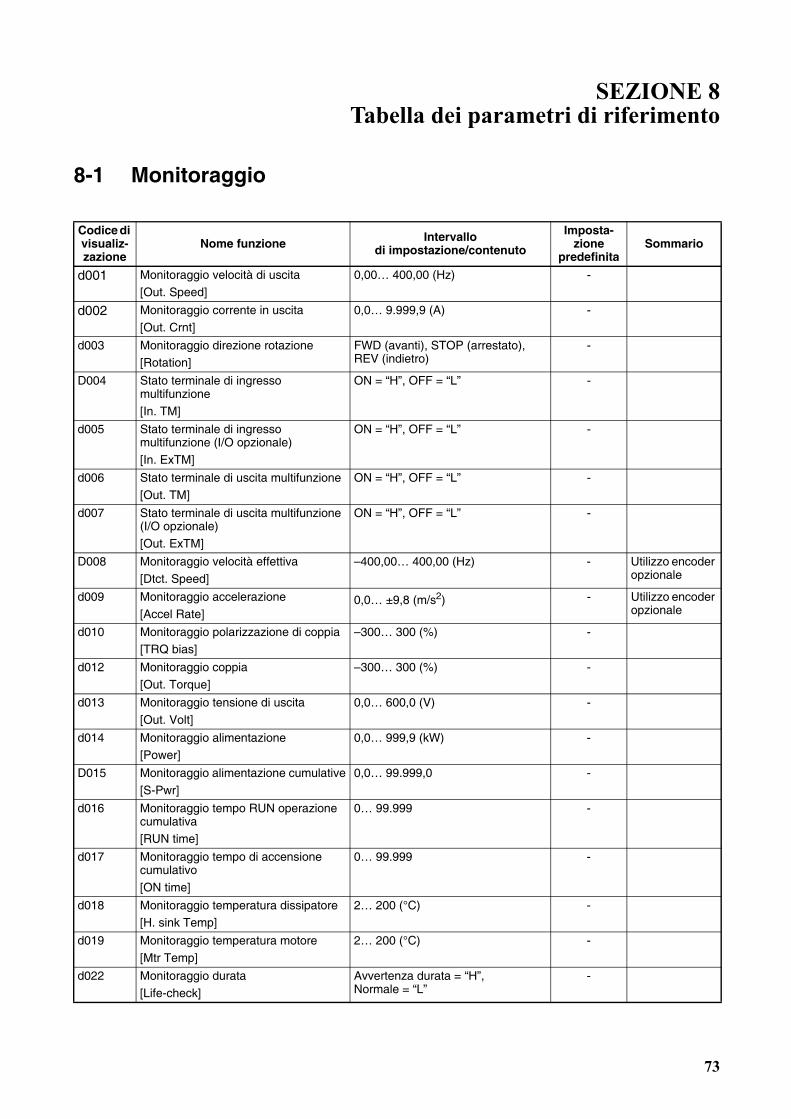
73
SEZIONE 8Tabella dei parametri di riferimento
8-1 Monitoraggio
Codice di visualiz-zazione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefinitaSommario
d001 Monitoraggio velocità di uscita[Out. Speed]
0,00… 400,00 (Hz) -
d002 Monitoraggio corrente in uscita[Out. Crnt]
0,0… 9.999,9 (A) -
d003 Monitoraggio direzione rotazione[Rotation]
FWD (avanti), STOP (arrestato), REV (indietro)
-
D004 Stato terminale di ingresso multifunzione[In. TM]
ON = “H”, OFF = “L” -
d005 Stato terminale di ingresso multifunzione (I/O opzionale)[In. ExTM]
ON = “H”, OFF = “L” -
d006 Stato terminale di uscita multifunzione[Out. TM]
ON = “H”, OFF = “L” -
d007 Stato terminale di uscita multifunzione (I/O opzionale)[Out. ExTM]
ON = “H”, OFF = “L” -
D008 Monitoraggio velocità effettiva[Dtct. Speed]
–400,00… 400,00 (Hz) - Utilizzo encoder opzionale
d009 Monitoraggio accelerazione[Accel Rate]
0,0… ±9,8 (m/s2) - Utilizzo encoder opzionale
d010 Monitoraggio polarizzazione di coppia[TRQ bias]
–300… 300 (%) -
d012 Monitoraggio coppia[Out. Torque]
–300… 300 (%) -
d013 Monitoraggio tensione di uscita[Out. Volt]
0,0… 600,0 (V) -
d014 Monitoraggio alimentazione[Power]
0,0… 999,9 (kW) -
D015 Monitoraggio alimentazione cumulative[S-Pwr]
0,0… 99.999,0 -
d016 Monitoraggio tempo RUN operazione cumulativa[RUN time]
0… 99.999 -
d017 Monitoraggio tempo di accensione cumulativo[ON time]
0… 99.999 -
d018 Monitoraggio temperatura dissipatore[H. sink Temp]
2… 200 (°C) -
d019 Monitoraggio temperatura motore[Mtr Temp]
2… 200 (°C) -
d022 Monitoraggio durata[Life-check]
Avvertenza durata = “H”, Normale = “L”
-

74
Monitoraggio Sezione 8-1
d023 Contatore programma[PRG Count]
0… 1.024 -
d024 Monitoraggio numero programma[PRG No.]
0… 9.999 -
D025 Monitoraggio utente 0[Umon0]
–2.147.483.647… 2.147.483.647 -
D026 Monitoraggio utente 1[Umon1]
–2.147.483.647… 21.47.483.647 -
D027 Monitoraggio utente 2[Umon2]
–2.147.483.647… 2.147.483.647 -
D029 Monitoraggio posizione di riferimento[Pos-Ref]
–2.147.483.647… 2.147.483.647 -
D030 Monitoraggio retroazione posizione[Pos-fb]
–2.147.483.647… 2.147.483.647 -
d031 Monitoraggio retroazione posizione (Speed-ENC)[PF Spd]
–2.147.483.647… 2.147.483.647 -
d032 Monitoraggio deviazione ENC sull'ingresso 2-ENC[ENC. dev]
0… 99.999 (mm) -
d033 Monitoraggio autoapprendimento[AutoLearn]
0… 32 -
D080 Contatore degli errori[ERR Count]
0… 65.535 -
d081 Monitoraggio errore 1[ERR1 ******]
Fattore di errore -Frequenza di uscita (Hz) -Corrente (A) -Tensione bus c.c. (V) -Tempo di funzionamento (h) -Tempo di accensione (h) -Orologio in tempo reale -
d082 Monitoraggio errore 2[ERR2 ******]
Fattore di errore -Frequenza di uscita (Hz) -Corrente (A) -Tensione bus c.c. (V) -Tempo di funzionamento (h) -Tempo di accensione (h) -Orologio in tempo reale -
d083 Monitoraggio errore 3[ERR3 ******]
Fattore di errore -Frequenza di uscita (Hz) -Corrente (A) -Tensione bus c.c. (V) -Tempo di funzionamento (h) -Tempo di accensione (h) -Orologio in tempo reale -
Codice di visualiz-zazione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefinitaSommario
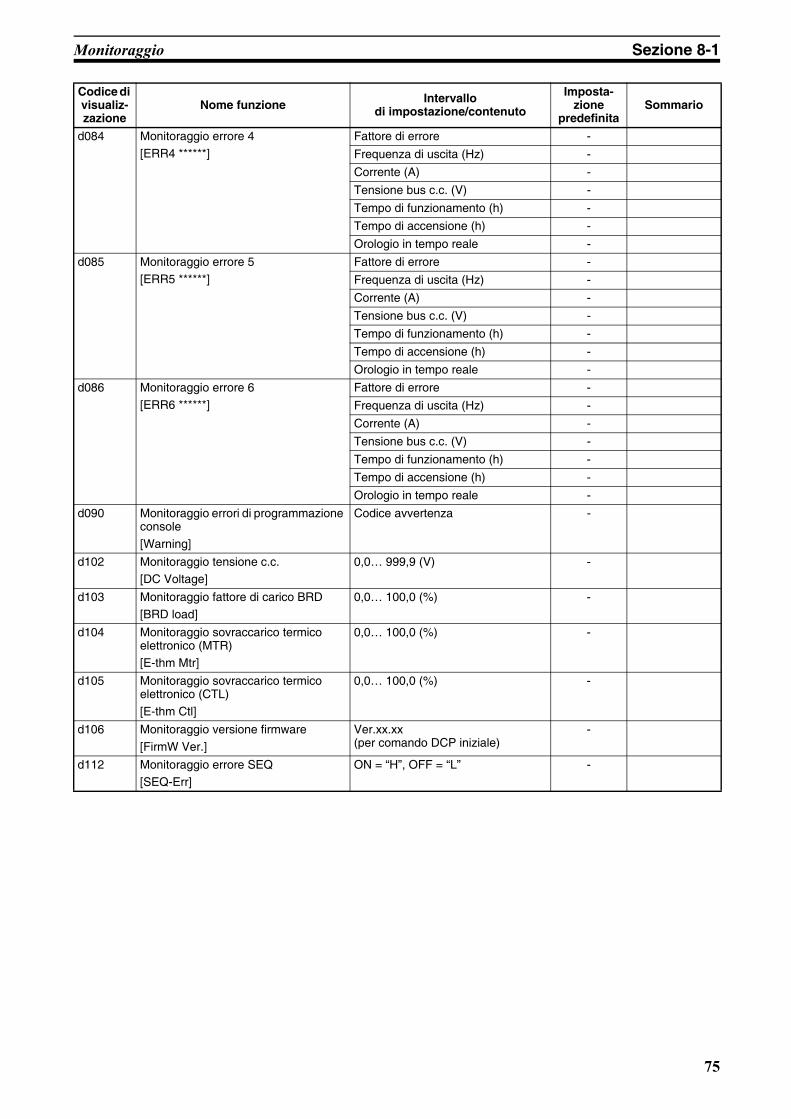
75
Monitoraggio Sezione 8-1
d084 Monitoraggio errore 4[ERR4 ******]
Fattore di errore -Frequenza di uscita (Hz) -Corrente (A) -Tensione bus c.c. (V) -Tempo di funzionamento (h) -Tempo di accensione (h) -Orologio in tempo reale -
d085 Monitoraggio errore 5[ERR5 ******]
Fattore di errore -Frequenza di uscita (Hz) -Corrente (A) -Tensione bus c.c. (V) -Tempo di funzionamento (h) -Tempo di accensione (h) -Orologio in tempo reale -
d086 Monitoraggio errore 6[ERR6 ******]
Fattore di errore -Frequenza di uscita (Hz) -Corrente (A) -Tensione bus c.c. (V) -Tempo di funzionamento (h) -Tempo di accensione (h) -Orologio in tempo reale -
d090 Monitoraggio errori di programmazione console[Warning]
Codice avvertenza -
d102 Monitoraggio tensione c.c.[DC Voltage]
0,0… 999,9 (V) -
d103 Monitoraggio fattore di carico BRD[BRD load]
0,0… 100,0 (%) -
d104 Monitoraggio sovraccarico termico elettronico (MTR)[E-thm Mtr]
0,0… 100,0 (%) -
d105 Monitoraggio sovraccarico termico elettronico (CTL)[E-thm Ctl]
0,0… 100,0 (%) -
d106 Monitoraggio versione firmware[FirmW Ver.]
Ver.xx.xx (per comando DCP iniziale)
-
d112 Monitoraggio errore SEQ[SEQ-Err]
ON = “H”, OFF = “L” -
Codice di visualiz-zazione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefinitaSommario

76
Tabella dei parametri Sezione 8-2
8-2 Tabella dei parametriCodice
di visualiz-zazione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefi-nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modifica durante
la marcia
F001 Impostazione velocità di riferimento[SetSpeed (*****)]
0,00… velocità massima (Hz) - OK Sì
F002 Impostazione tempo di accelerazione[Acc. Time (*****)]
0,01… 3.600,00 (s) - OK Sì
F003 Impostazione tempo di decelerazione[Dec. Time (*****)]
0,01… 3.600,00 (s) - OK Sì
F005 Inserimento password visualizzazione[Disp-PassWord?]
0000h… FFFFh 0000h Sì
F006 Impostazione password visualizzazione[Disp-PassWord set]
0000h… FFFFh 0000h Sì
F007 Inserimento password blocco software[SoftLock Password?]
0000h… FFFFh 0000h Sì
F008 Impostazione password blocco software[SoftLock Password set]
0000h… FFFFh 0000h Sì
F009 Routing tasto RUN del tastierino[RUN-key direction]
00: FW (Rotazione in avanti) 00 No01: RV (Rotazione indietro)
F010 Abilitazione tasto STOP[STOP-key Select]
00: Abilitato 00 Sì01: Disabilitato02: Reset (disabilitazione della sola funzione di arresto)
F011 Limitazione alla visualizzazione del codice funzione[Display Select]
00: ALL (visualizzazione completa) 00 Sì01: FUNCTION (visualizzazione specifica per la funzione)02: USER (impostazione utente)03: COMPARE (visualizzazione del confronto dati)05: MONITOR (solo visualizzazione di monitoraggio)
F012 Selezione visualizzazione iniziale[Initial Disp. select]
d001… P205, no (Monitor-B) d001 Sì
F013 Selezione blocco software[Soft Lock]
00: MD0 (disabilitazione della modifica di dati diversi da “F013” quando SFT è ON)
00 Sì
01: MD1 (disabilitazione della modifica di dati diversi da “F013” e impostazioni della frequenza quando SFT è ON)02: MD2 (disabilitazione della modifica di dati diversi da “F013”)03: MD3 (disabilitazione della modifica di dati diversi da “F013” e impostazioni della frequenza)
F014 Abilitazione funzione di copia[Copy Function]
00: Disabilitato 00 Sì01: Abilitato
F015 Diametro puleggia[Sheave Diameter]
100… 2.000 (mm) 400 Sì

77
Tabella dei parametri Sezione 8-2
F016 Rapporto corde[Roping Ratio]
00: (1:1) 00 Sì01: (1:2)02: (1:3)03: (1:4)
F017 Rapporto di riduzione[Gear Ratio]
0,10… 40,00 1,00 Sì
F018 Diametro puleggia ENC-posizione[P-ENC. Pooley Diameter]
100… 2.000 (mm) 400 Sì
F019 Guadagno calcolo ENC-posizione[P-ENC. Cal. gain]
0,01… 100,00 1,00 Sì
F020 Selezione unità di velocità[Speed unit select]
00: Hz 00 Sì01: min-102: m/s03: %04: ft/m
F021 Selezione unità di accele-razione/decelerazione[Acc/Dec unit select]
00: s 00 Sì
01: m/s2
F022 Selezione unità di posizione[Position unit select]
00: non 00 Sì01: mm02: cm
F023 Cancellazione cumulativa dei dati di alimentazione di ingresso[Power data clear]
00: CNT (continua) 00 Sì01: CLR (azzeramento contatore)
F024 Impostazione guadagno visualizzazione alimentazione di ingresso cumulativa[Power data disp. gain]
1… 1.000 1 Sì
F025 Selezione funzione program-mazione drive (EzSQ)[EzSQ function select]
00: Disabilitato 00 Sì01: Abilitato
F026 Trigger comando RUN pro-grammazione drive (EzSQ)[EzSQ Run trigger]
00: TRM (terminale “PRG”) 01 Sì01: PARAM (impostazione F025 = abilitato)
F030 Selezione modalità di inizializzazione[Initialization mode]
00: no (disabilitata) 00 Sì01: Err data (cronologia degli errori)02: Parametro03: Err/Prm (cronologia degli errori e parametro)04: Err/Prm/EzSQ (cronologia degli errori, parametro e programmazione drive)
F031 Selezione area di inizializzazione[Initialization area]
01: 01 01 Sì02: 02
F032 Selezione dati di inizializzazione[Initialization data]
00: Tutte 00 Sì01: Exc. TERM (il parametro asso-ciato ai terminali viene escluso)02: Exc. COM (il parametro associato alle comunicazioni viene escluso)03: Exc. TERM/COM (il parametro associato al terminale e alle comuni-cazioni viene escluso)
F034 Inizializza selezione attivazione[Initialize trigger]
00: Nessuna azione (disabilitata) 00 No01: 'Inizializza (abilitata)
Codice di
visualiz-zazione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefi-nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modifica durante
la marcia

78
Tabella dei parametri Sezione 8-2
Codice di visua-
lizza-zione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefi-nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modi-fica
durante la mar-
ciaA001 Selezione velocità
di riferimento[Speed ref. source]
01: O (utilizzo ingresso O-L) 04 No02: OI (utilizzo ingresso OI-L)
03: O2 (utilizzo ingresso O2-L)
04: Multi (utilizzo multivelocità)05: RS485 (utilizzo RTU-Modbus RS485)06: OP1 (utilizzo scheda opzionale 1)07: OP2 (utilizzo scheda opzionale 2)08: PRG (utilizzo programmazione drive)
A002 Selezione sorgente comando RUN[RUN cmd source]
01: TRM (utilizzo terminale del circuito di controllo)
01 No
02: REM (utilizzo tastierino)
03: RS485 (utilizzo RS485)
04: OP1 (utilizzo scheda opzionale 1)
05: OP2 (utilizzo scheda opzionale 2)
A003 Impostazione velocità di base, primo motore[Base Speed, 1st]
1,00… velocità massima (Hz), primo motore
50,00 OK No
A004 Impostazione velocità massima, primo motore[Maximum Speed. 1st]
1,00… 400,00 (Hz) 50,00 OK No
A006 Regolazione velocità di avvio (con VF, OLV)[Start speed]
0,10… 9,99 (Hz) 0,10 OK No
A007 Impostazione frequenza portante[Carrier frequency]
2,0… 15,0 (kHz) 8,0 OK No
A016 Inversione rotazione motore[Mtr rotation Rev.]
00: Diretta (fase A principale) 00 No01: Indietro (fase B principale)
A019 Selezione multivelocità[Multi-Spd mode]
00: Lift (velocità ascensore) 00 No
01: Multi (velocità multifase)
A020 Impostazione velocità speciale[Special Speed]
0,00… velocità massima (Hz) 0,00 OK Sì
A021 Impostazione multivelocità 1[Multi-Speed 01]
0,00… velocità massima (Hz) 0,00 OK Sì
A022 Impostazione multivelocità 2[Multi-Speed 02]
0,00… velocità massima (Hz) 0,00 OK Sì
A023 Impostazione multivelocità 3[Multi-Speed 03]
0,00… velocità massima (Hz) 0,00 OK Sì
A024 Impostazione multivelocità 4[Multi-Speed 04]
0,00… velocità massima (Hz) 0,00 OK Sì
A025 Impostazione multivelocità 5[Multi-Speed 05]
0,00… velocità massima (Hz) 0,00 OK Sì
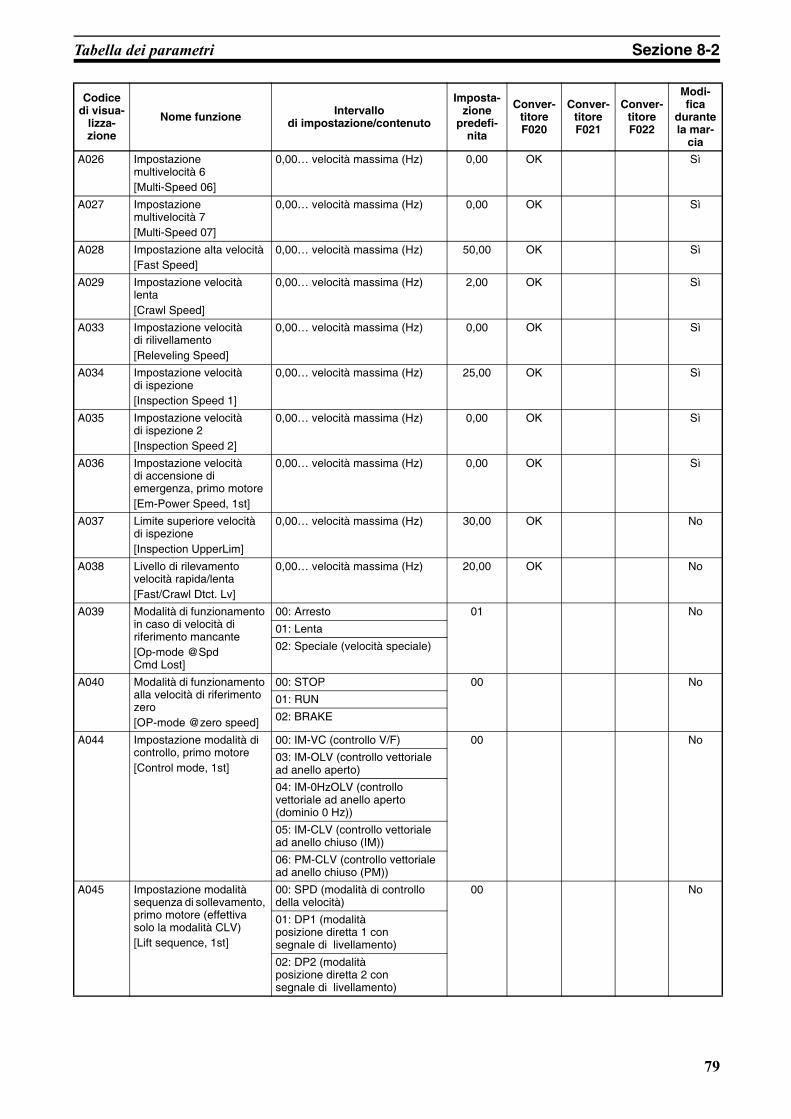
79
Tabella dei parametri Sezione 8-2
A026 Impostazione multivelocità 6[Multi-Speed 06]
0,00… velocità massima (Hz) 0,00 OK Sì
A027 Impostazione multivelocità 7[Multi-Speed 07]
0,00… velocità massima (Hz) 0,00 OK Sì
A028 Impostazione alta velocità[Fast Speed]
0,00… velocità massima (Hz) 50,00 OK Sì
A029 Impostazione velocità lenta[Crawl Speed]
0,00… velocità massima (Hz) 2,00 OK Sì
A033 Impostazione velocità di rilivellamento[Releveling Speed]
0,00… velocità massima (Hz) 0,00 OK Sì
A034 Impostazione velocità di ispezione[Inspection Speed 1]
0,00… velocità massima (Hz) 25,00 OK Sì
A035 Impostazione velocità di ispezione 2[Inspection Speed 2]
0,00… velocità massima (Hz) 0,00 OK Sì
A036 Impostazione velocità di accensione di emergenza, primo motore[Em-Power Speed, 1st]
0,00… velocità massima (Hz) 0,00 OK Sì
A037 Limite superiore velocità di ispezione[Inspection UpperLim]
0,00… velocità massima (Hz) 30,00 OK No
A038 Livello di rilevamento velocità rapida/lenta[Fast/Crawl Dtct. Lv]
0,00… velocità massima (Hz) 20,00 OK No
A039 Modalità di funzionamento in caso di velocità di riferimento mancante[Op-mode @Spd Cmd Lost]
00: Arresto 01 No
01: Lenta
02: Speciale (velocità speciale)
A040 Modalità di funzionamento alla velocità di riferimento zero[OP-mode @zero speed]
00: STOP 00 No01: RUN
02: BRAKE
A044 Impostazione modalità di controllo, primo motore[Control mode, 1st]
00: IM-VC (controllo V/F) 00 No03: IM-OLV (controllo vettoriale ad anello aperto)04: IM-0HzOLV (controllo vettoriale ad anello aperto (dominio 0 Hz))
05: IM-CLV (controllo vettoriale ad anello chiuso (IM))
06: PM-CLV (controllo vettoriale ad anello chiuso (PM))
A045 Impostazione modalità sequenza di sollevamento, primo motore (effettiva solo la modalità CLV)[Lift sequence, 1st]
00: SPD (modalità di controllo della velocità)
00 No
01: DP1 (modalità posizione diretta 1 con segnale di livellamento)
02: DP2 (modalità posizione diretta 2 con segnale di livellamento)
Codice di visua-
lizza-zione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefi-nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modi-fica
durante la mar-
cia

80
Tabella dei parametri Sezione 8-2
A046 Impostazione modalità di controllo con CMC=ON, primo motore[Control mode(CMC), 1st]
00: IM-VC (controllo V/F) 00 No
03: IM-OLV (controllo vettoriale ad anello aperto)
04: IM-0HzOLV (controllo vettoriale ad anello aperto (dominio 0 Hz))05: IM-CLV (controllo vettoriale ad anello chiuso (IM))06: PM-CLV (controllo vettoriale ad anello chiuso (PM))
A050 Selezione curva di accelerazione[Acceleration curve]
00: Lineare 04 No
04: Curva di sollevamento a S
A051 Selezione curva di decelerazione[Deceleration curve]
00: Lineare 04 No
04: Curva di sollevamento a S
A052 Selezione ingresso tempo di accelerazione/decelerazione[Acc/Dec input source]
00: REM (tastierino) 00 No01: OP1 (opzionale 1)
02: OP2 (opzionale 2)
03: PRG (programmazione drive)A053 Selezione accelerazione/
decelerazione[Acc/Dec select]
00: Comune(utilizzando A054/A055)
00 No
01: Multi (accelerazione/decelerazione multiuso)
A054 Impostazione tempo di accelerazione alla velocità comune/speciale[Acc. Time @Common/sp1]
0,00… 3.600,00 (s) 1,80 OK Sì
A055 Impostazione tempo di decelerazione alla velocità comune/speciale[Dec. Time @Common/sp1]
0,00… 3.600,00 (s) 1,80 OK Sì
A056 Tempo di accelerazione alla velocità alta/multivelocità 1[Acc. Time @Fast/Multi1]
0,00… 3.600,00 (s) 1,80 OK Sì
A057 Tempo di decelerazione alla velocità alta/multivelocità 1[Dec Time @Fast/Multi1]
0,00… 3.600,00 (s) 1,80 OK Sì
A058 Tempo di accelerazione alla velocità lenta/multivelocità 2[Acc. Time @Crwl/Multi2]
0,00… 3.600,00 (s) 1,80 OK Sì
A059 Tempo di decelerazione alla velocità lenta/multivelocità 2[Dec. Time @Crwl/Multi2]
0,00… 3.600,00 (s) 1,80 OK Sì
A060 Tempo di accelerazione alla multivelocità 3[Acc. Time @Multi3]
0,00… 3.600,00 (s) 1,80 OK Sì
A061 Tempo di decelerazione alla multivelocità 3[Dec. Time @Multi3]
0,00… 3.600,00 (s) 1,80 OK Sì
A062 Tempo di accelerazione alla multivelocità 4[Acc. Time @Multi4]
0,00… 3.600,00 (s) 1,80 OK Sì
Codice di visua-
lizza-zione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefi-nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modi-fica
durante la mar-
cia

81
Tabella dei parametri Sezione 8-2
A063 Tempo di decelerazione alla multivelocità 4[Dec. Time @Multi4]
0,00… 3.600,00 (s) 1,80 OK Sì
A064 Tempo di accelerazione alla multivelocità 5[Acc. Time @Multi5]
0,00… 3.600,00 (s) 1,80 OK Sì
A065 Tempo di decelerazione alla multivelocità 5[Dec. Time @Multi5]
0,00… 3.600,00 (s) 1,80 OK Sì
A066 Tempo di accelerazione alla velocità di rilivellamento/multivelocità 6[Acc. Time @ReLv/Multi6]
0,00… 3.600,00 (s) 1,80 OK Sì
A067 Tempo di decelerazione alla velocità di rilivellamento/multivelocità 6[Dec. Time @ReLv/Multi6]
0,00… 3.600,00 (s) 1,80 OK Sì
A068 Tempo di accelerazione alla velocità di ispezione/multivelocità 7[Acc. Time @Insp/Multi7]
0,00… 3.600,00 (s) 1,80 OK Sì
A069 Tempo di decelerazione alla velocità di ispezione/multivelocità 7[Dec. Time @Insp/Multi7]
0,00… 3.600,00 (s) 1,80 OK Sì
A070 Rapporto 1 curva di sollevamento a S all'accelerazione[S-curve Ratio @acc. 1]
0… 100 (%)A070 + A071 <= 100%
25 No
A071 Rapporto 2 curva di sollevamento a S all'accelerazione[S-curve Ratio @acc. 2]
0… 100 (%)A070 + A071 <= 100%
15 No
A072 Rapporto 1 curva di sollevamento a S alla decelerazione[S-curve Ratio @dec. 1]
0… 100 (%)A072 + A073 <= 100%
15 No
A073 Rapporto 2 curva di sollevamento a S alla decelerazione[S-curve Ratio @dec. 2]
0… 100 (%)A072 + A073 <= 100%
15 No
A074 Rapporto 1 curva di sollevamento a S all'arresto[S-curve Ratio @stop. 1]
0… 100 (%)A074 + A075 <= 100%
15 No
A075 Rapporto 2 curva di sollevamento a S all'arresto[S-curve Ratio @stop. 2]
0… 100 (%)A074 + A075 <= 100%
15 No
A076 Limite di velocità, primo motore[Speed Limit, 1st]
0,00… velocità massima (Hz) 0,00 OK No
A080 Impostazione guadagno V/f, primo motore[V/f gain, 1st]
20… 100 (%) 100 Sì
Codice di visua-
lizza-zione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefi-nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modi-fica
durante la mar-
cia

82
Tabella dei parametri Sezione 8-2
A081 Selezione funzione AVR, primo motore[AVR function, 1st]
00: ON (sempre acceso) 02 No
01: OFF (sempre spento)
02: DOFF (spento durante la decelerazione)
A082 Selezione tensione AVR, primo motore[AVR voltage, 1st]
00: 200 (V) – classe 200 V 200/400 No01: 208 (V) – classe 200 V
02: 215 (V) – classe 200 V
03: 220 (V) – classe 200 V04: 230 (V) – classe 200 V
05: 240 (V) – classe 200 V
06: 380 (V) – classe 400 V07: 400 (V) – classe 400 V
08: 415 (V) – classe 400 V
09: 440 (V) – classe 400 V10: 460 (V) – classe 400 V
11: 480 (V) – classe 400 V
A090 Tempo di ritardo RUN, primo motore[Run delay time, 1st]
0,00… 2,00 (s) 0,20 No
A091 Tempo di ritardo contattore, primo motore[Cont. open delay, 1st]
0,00… 2,00 (s) 0,10 No
A092 Tempo verifica risposta contattore, primo motore[Cont. Ans back, 1st]
0,00… 5,00 (s) 0,10 No
A093 Tempo di ritardo apertura freno, primo motore[Brk Open delay, 1st]
0,00… 2,00 (s) 0,20 No
A094 Tempo di ritardo chiusura freno, primo motore[Brk Close delay, 1st]
0,00… 2,00 (s) 0,20 No
A095 Tempo verifica risposta freno, primo motore[Brake Ans. back, 1st]
0,00… 5,00 (s) 0,10 No
A096 Tempo di iniezione c.c./blocco servo all'avvio, primo motore[Stnd-Still @start, 1st]
0,00… 10,00 (s) 0,60 No
A097 Tempo di iniezione c.c./blocco servo all'arresto, primo motore[Stnd-Still @stop, 1st]
0,00… 10,00 (s) 0,60 No
A098 Alimentazione iniezione c.c. all'avvio, primo motore[DC power @start, 1st]
0… 100 (%) 50 No
A099 Alimentazione iniezione c.c. all'arresto, primo motore[DC power @stop, 1st]
0… 100 (%) 50 No
A105 Riavvio a velocità elevata[Hi-Speed Retrigger]
00: Disabilitato 00 No01: Abilitato
A106 Modalità di esecuzione @A105 = disabilitata[Hi-Speed Retrg. mode]
00: Arresto 00 No
01: Errore02: Seq-Err
03: Errore silenzioso
Codice di visua-
lizza-zione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefi-nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modi-fica
durante la mar-
cia

83
Tabella dei parametri Sezione 8-2
A111 Selezione Piano rapido[Quick floor function]
00: Disabilitato 00 No
01: Abilitato
A113 Tempo minimo velocità costante[Min. Const-Spd time]
0,0… 2,0 (s) 0,0 No
A114 Guadagno tempo di accelerazione calcolo della distanza[Calc. gain @acc]
50,00… 200,00 (%) 100,00 No
A115 Guadagno tempo di decelerazione calcolo della distanza[Calc. gain @dec]
50,00… 200,00 (%) 100,00 No
A150 Velocità iniziale intervallo attivo ingresso O-L[[O] range start speed]
0,00… 400,00 (Hz) 0,00 OK Sì
A151 Velocità finale intervallo attivo ingresso O-L[[O] range end speed]
0,00… 400,00 (Hz) 0,00 OK Sì
A152 Tensione iniziale intervallo attivo ingresso O-L[[O] range start voltage]
0… 100 (%) 0 Sì
A153 Tensione finale intervallo attivo ingresso O-L[[O] range end voltage]
0… 100 (%) 100 Sì
A154 Attivazione velocità di avvio ingresso O-L[[O] start-spd enable]
00: O-EXS (frequenza di avvio esterna)
01 Sì
01: 0Hz
A155 Velocità di avvio intervallo attivo ingresso OI-L[[OI] range start speed]
0,00… 400,00 (Hz) 0,00 OK Sì
A156 Velocità finale intervallo attivo ingresso OI-L[[OI] range end speed]
0,00… 400,00 (Hz) 0,00 OK Sì
A157 Corrente di avvio dell'intervallo attivo dell'ingresso OI-L[[OI] range start crnt]
0… 100 (%) 20 Sì
A158 Corrente finale intervallo attivo ingresso OI-L[[OI] range end crnt]
0… 100 (%) 100 Sì
A159 Attivazione velocità di avvio ingresso OI-L[[OI] start-spd enable]
00: O-EXS (frequenza di avvio esterna)
00 Sì
01: 0Hz
A160 Velocità di avvio intervallo attivo ingresso O2-L[[O2] range start speed]
–400,00… 400,00 (Hz) 0,00 OK Sì
A161 Velocità finale intervallo attivo ingresso O2-L[[O2] range end speed]
–400,00… 400,00 (Hz) 0,00 OK Sì
A162 Tensione di avvio intervallo attivo ingresso O2-L[[O2] range start volt.]
–100… 100 (%) –100 Sì
A163 Tensione finale intervallo attivo ingresso O2-L[[O2] range end volt.]
–100… 100 (%) 100 Sì
Codice di visua-
lizza-zione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefi-nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modi-fica
durante la mar-
cia

84
Tabella dei parametri Sezione 8-2
A164 Costante di tempo del filtro della frequenza esterna[Analog input filter]
1… 30 (o 31)(31: Filtro 500 ms ±0,1 Hz con isteresi)
8 Sì
A203 Impostazione velocità di base, secondo motore[Base Speed, 2nd]
1,00… velocità massima (Hz), secondo motore
50,00 OK No
A204 Impostazione velocità massima, secondo motore[Maximum speed. 2nd]
1,00… 400,00 (Hz) 50,00 OK No
A236 Impostazione velocità di accensione di emergenza, secondo motore[Em-Power Speed, 2nd]
0,00… velocità massima (Hz) 0,00 OK Sì
A244 Impostazione modalità di controllo, secondo motore[Control mode, 2nd]
00: IM-VC (controllo V/F) 00 No
03: IM-OLV (controllo vettoriale ad anello aperto)
04: IM-0HzOLV (controllo vettoriale ad anello aperto (dominio 0 Hz))05: IM-CLV (controllo vettoriale ad anello chiuso (IM))06: PM-CLV (controllo vettoriale ad anello chiuso (PM))
A245 Impostazione modalità sequenza di sollevamento, secondo motore (effettiva solo la modalità CLV)[Lift sequence, 2nd]
00: SPD (modalità di controllo della velocità)
00 No
01: DP1 (modalità posizione diretta 1 con segnale di livellamento)
02: DP2 (modalità posizione diretta 2 con segnale di livellamento)
A246 Impostazione modalità di controllo con CMC=ON, secondo motore[Control mode(CMC), 2nd]
00: IM-VC (controllo V/F) 00 No
03: IM-OLV (controllo vettoriale ad anello aperto)
04: IM-0HzOLV (controllo vettoriale ad anello aperto (dominio 0 Hz))05: IM-CLV (controllo vettoriale ad anello chiuso (IM))06: PM-CLV (controllo vettoriale ad anello chiuso (PM))
A276 Limite di velocità, secondo motore[Speed Limit, 2nd]
0,00… velocità massima (Hz) 0,00 OK No
A280 Impostazione guadagno V/f, secondo motore[V/f gain, 2nd]
20… 100 (%) 100 Sì
A281 Selezione funzione AVR, secondo motore[AVR function, 2nd]
00: ON (sempre acceso) 02 No01: OFF (sempre spento)
02: DOFF (spento durante la decelerazione)
Codice di visua-
lizza-zione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefi-nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modi-fica
durante la mar-
cia

85
Tabella dei parametri Sezione 8-2
A282 Selezione della tensione AVR, secondo motore[AVR voltage, 2nd]
00: 200 (V) – classe 200 V 200/400 No
01: 208 (V) – classe 200 V
02: 215 (V) – classe 200 V03: 220 (V) – classe 200 V
04: 230 (V) – classe 200 V
05: 240 (V) – classe 200 V06: 380 (V) – classe 400 V
07: 400 (V) – classe 400 V
08: 415 (V) – classe 400 V09: 440 (V) – classe 400 V
10: 460 (V) – classe 400 V
11: 480 (V) – classe 400 VA290 Tempo di ritardo RUN,
secondo motore[Run delay time, 2nd]
0,00… 2,00 (s) 0,20 No
A291 Tempo di ritardo contattore, secondo motore[Cont. open delay, 2nd]
0,00… 2,00 (s) 0,10 No
A292 Tempo verifica risposta contattore, secondo motore[Cont. Ans back, 2nd]
0,00… 5,00 (s) 0,10 No
A293 Tempo di ritardo apertura freno, secondo motore[Brk Open delay, 2nd]
0,00… 2,00 (s) 0,20 No
A294 Tempo di ritardo chiusura freno, secondo motore[Brk Close delay, 2nd]
0,00… 2,00 (s) 0,20 No
A295 Tempo verifica risposta freno, secondo motore[Brake Ans. back, 2nd]
0,00… 5,00 (s) 0,10 No
A296 Tempo di iniezione c.c./blocco servo all'avvio, secondo motore[Stnd-Still @start, 2nd]
0,00… 10,00 (s) 0,60 No
A297 Tempo di iniezione c.c./blocco servo all'arresto, secondo motore[Stnd-Still @stop, 2nd]
0,00… 10,00 (s) 0,60 No
A298 Alimentazione iniezione c.c. all'avvio, secondo motore[DC power @start, 2nd]
0… 100 (%) 50 No
A299 Alimentazione iniezione c.c. all'arresto, secondo motore[DC power @stop, 2nd]
0… 100 (%) 50 No
Codice di visua-
lizza-zione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefi-nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modi-fica
durante la mar-
cia
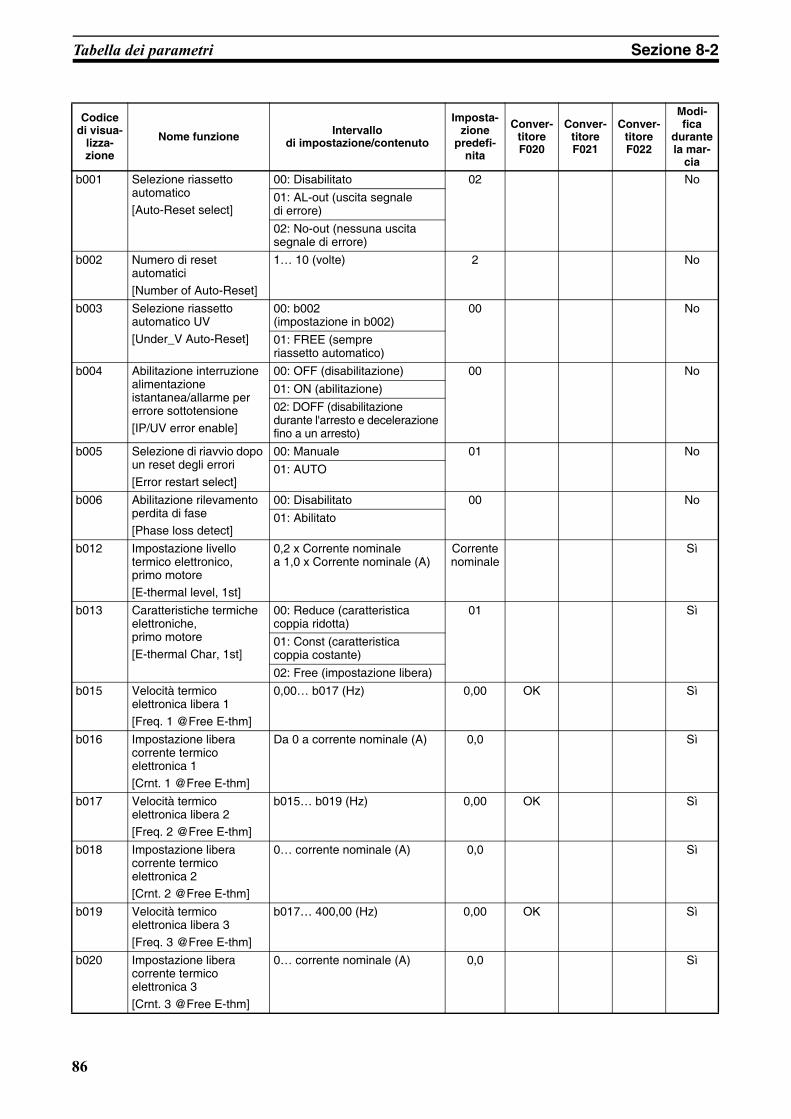
86
Tabella dei parametri Sezione 8-2
Codice di visua-
lizza-zione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefi-nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modi-fica
durante la mar-
ciab001 Selezione riassetto
automatico[Auto-Reset select]
00: Disabilitato 02 No01: AL-out (uscita segnale di errore)02: No-out (nessuna uscita segnale di errore)
b002 Numero di reset automatici[Number of Auto-Reset]
1… 10 (volte) 2 No
b003 Selezione riassetto automatico UV[Under_V Auto-Reset]
00: b002 (impostazione in b002)
00 No
01: FREE (sempre riassetto automatico)
b004 Abilitazione interruzione alimentazione istantanea/allarme per errore sottotensione[IP/UV error enable]
00: OFF (disabilitazione) 00 No01: ON (abilitazione)02: DOFF (disabilitazione durante l'arresto e decelerazione fino a un arresto)
b005 Selezione di riavvio dopo un reset degli errori[Error restart select]
00: Manuale 01 No01: AUTO
b006 Abilitazione rilevamento perdita di fase[Phase loss detect]
00: Disabilitato 00 No01: Abilitato
b012 Impostazione livello termico elettronico, primo motore[E-thermal level, 1st]
0,2 x Corrente nominale a 1,0 x Corrente nominale (A)
Corrente nominale
Sì
b013 Caratteristiche termiche elettroniche, primo motore[E-thermal Char, 1st]
00: Reduce (caratteristica coppia ridotta)
01 Sì
01: Const (caratteristica coppia costante)02: Free (impostazione libera)
b015 Velocità termico elettronica libera 1[Freq. 1 @Free E-thm]
0,00… b017 (Hz) 0,00 OK Sì
b016 Impostazione libera corrente termico elettronica 1[Crnt. 1 @Free E-thm]
Da 0 a corrente nominale (A) 0,0 Sì
b017 Velocità termico elettronica libera 2[Freq. 2 @Free E-thm]
b015… b019 (Hz) 0,00 OK Sì
b018 Impostazione libera corrente termico elettronica 2[Crnt. 2 @Free E-thm]
0… corrente nominale (A) 0,0 Sì
b019 Velocità termico elettronica libera 3[Freq. 3 @Free E-thm]
b017… 400,00 (Hz) 0,00 OK Sì
b020 Impostazione libera corrente termico elettronica 3[Crnt. 3 @Free E-thm]
0… corrente nominale (A) 0,0 Sì
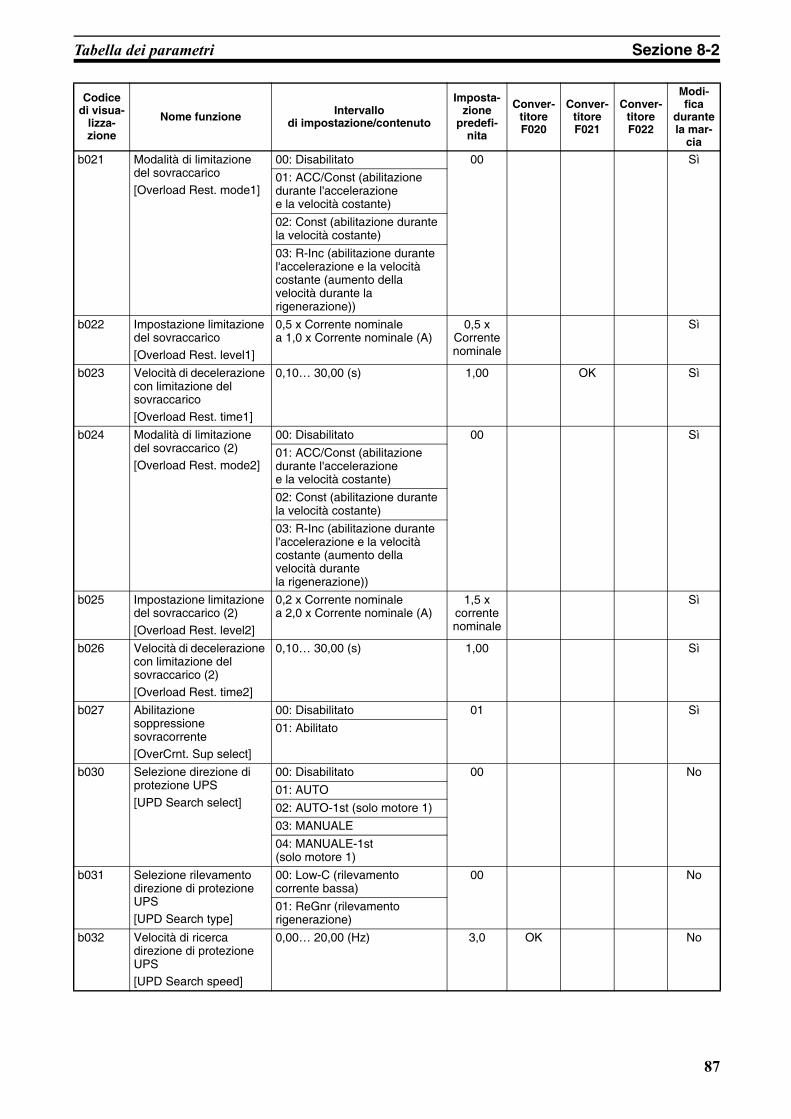
87
Tabella dei parametri Sezione 8-2
b021 Modalità di limitazione del sovraccarico[Overload Rest. mode1]
00: Disabilitato 00 Sì01: ACC/Const (abilitazione durante l'accelerazione e la velocità costante)02: Const (abilitazione durante la velocità costante)03: R-Inc (abilitazione durante l'accelerazione e la velocità costante (aumento della velocità durante la rigenerazione))
b022 Impostazione limitazione del sovraccarico[Overload Rest. level1]
0,5 x Corrente nominale a 1,0 x Corrente nominale (A)
0,5 x Corrente nominale
Sì
b023 Velocità di decelerazione con limitazione del sovraccarico[Overload Rest. time1]
0,10… 30,00 (s) 1,00 OK Sì
b024 Modalità di limitazione del sovraccarico (2)[Overload Rest. mode2]
00: Disabilitato 00 Sì01: ACC/Const (abilitazione durante l'accelerazione e la velocità costante)02: Const (abilitazione durante la velocità costante)03: R-Inc (abilitazione durante l'accelerazione e la velocità costante (aumento della velocità durante la rigenerazione))
b025 Impostazione limitazione del sovraccarico (2)[Overload Rest. level2]
0,2 x Corrente nominale a 2,0 x Corrente nominale (A)
1,5 x corrente nominale
Sì
b026 Velocità di decelerazione con limitazione del sovraccarico (2)[Overload Rest. time2]
0,10… 30,00 (s) 1,00 Sì
b027 Abilitazione soppressione sovracorrente[OverCrnt. Sup select]
00: Disabilitato 01 Sì01: Abilitato
b030 Selezione direzione di protezione UPS[UPD Search select]
00: Disabilitato 00 No01: AUTO02: AUTO-1st (solo motore 1)03: MANUALE04: MANUALE-1st (solo motore 1)
b031 Selezione rilevamento direzione di protezione UPS[UPD Search type]
00: Low-C (rilevamento corrente bassa)
00 No
01: ReGnr (rilevamento rigenerazione)
b032 Velocità di ricerca direzione di protezione UPS[UPD Search speed]
0,00… 20,00 (Hz) 3,0 OK No
Codice di visua-
lizza-zione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefi-nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modi-fica
durante la mar-
cia
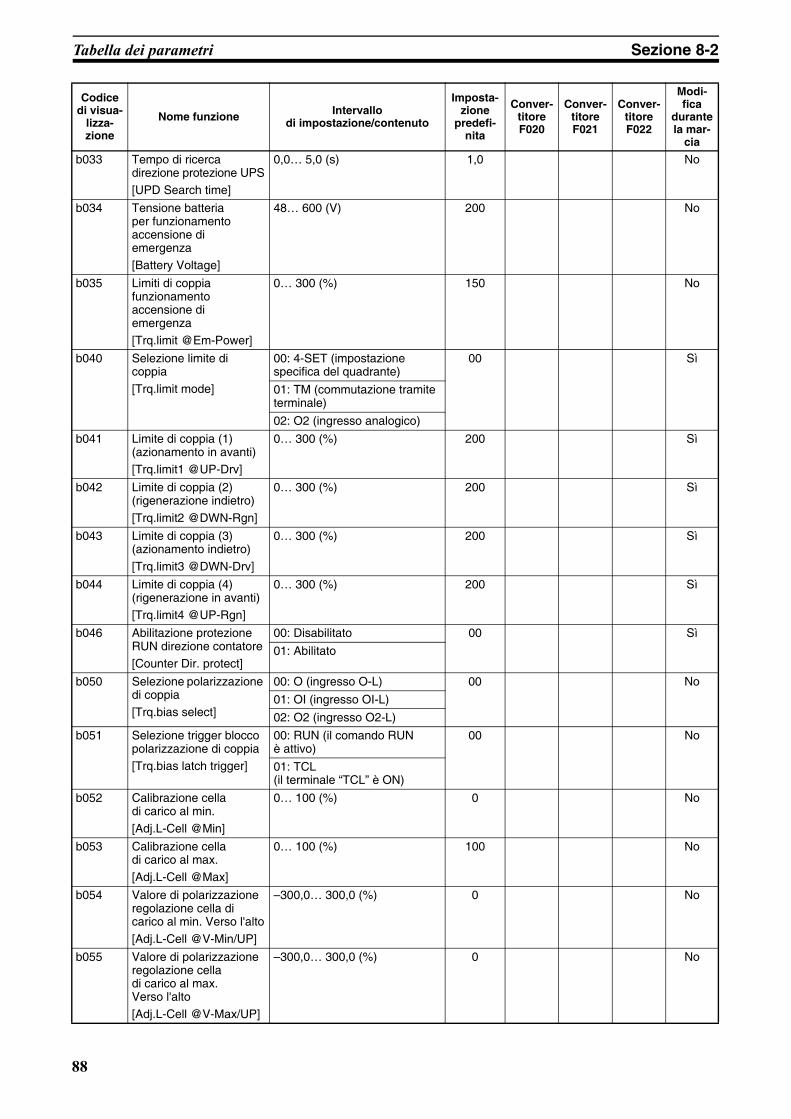
88
Tabella dei parametri Sezione 8-2
b033 Tempo di ricerca direzione protezione UPS[UPD Search time]
0,0… 5,0 (s) 1,0 No
b034 Tensione batteria per funzionamento accensione di emergenza[Battery Voltage]
48… 600 (V) 200 No
b035 Limiti di coppia funzionamento accensione di emergenza[Trq.limit @Em-Power]
0… 300 (%) 150 No
b040 Selezione limite di coppia[Trq.limit mode]
00: 4-SET (impostazione specifica del quadrante)
00 Sì
01: TM (commutazione tramite terminale)02: O2 (ingresso analogico)
b041 Limite di coppia (1) (azionamento in avanti)[Trq.limit1 @UP-Drv]
0… 300 (%) 200 Sì
b042 Limite di coppia (2) (rigenerazione indietro)[Trq.limit2 @DWN-Rgn]
0… 300 (%) 200 Sì
b043 Limite di coppia (3) (azionamento indietro)[Trq.limit3 @DWN-Drv]
0… 300 (%) 200 Sì
b044 Limite di coppia (4) (rigenerazione in avanti)[Trq.limit4 @UP-Rgn]
0… 300 (%) 200 Sì
b046 Abilitazione protezione RUN direzione contatore[Counter Dir. protect]
00: Disabilitato 00 Sì01: Abilitato
b050 Selezione polarizzazione di coppia[Trq.bias select]
00: O (ingresso O-L) 00 No01: OI (ingresso OI-L)02: O2 (ingresso O2-L)
b051 Selezione trigger blocco polarizzazione di coppia[Trq.bias latch trigger]
00: RUN (il comando RUN è attivo)
00 No
01: TCL (il terminale “TCL” è ON)
b052 Calibrazione cella di carico al min.[Adj.L-Cell @Min]
0… 100 (%) 0 No
b053 Calibrazione cella di carico al max.[Adj.L-Cell @Max]
0… 100 (%) 100 No
b054 Valore di polarizzazione regolazione cella di carico al min. Verso l'alto[Adj.L-Cell @V-Min/UP]
–300,0… 300,0 (%) 0 No
b055 Valore di polarizzazione regolazione cella di carico al max. Verso l'alto[Adj.L-Cell @V-Max/UP]
–300,0… 300,0 (%) 0 No
Codice di visua-
lizza-zione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefi-nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modi-fica
durante la mar-
cia

89
Tabella dei parametri Sezione 8-2
b056 Valore di polarizzazione regolazione cella di carico al min. Verso il basso[Adj.L-Cell @V-Min/DWN]
–300,0… 300,0 (%) 0 No
b057 Valore di polarizzazione regolazione cella di carico al max. Verso il basso[Adj.L-Cell @V-Max/DWN]
–300,0… 300,0 (%) 0 No
b058 Costante di tempo filtro di polarizzazione della coppia[Trq.bias Filter]
5… 500 (ms) 10 No
b059 Impostazione livello di dissolvenza compensazione di coppia[Trq.bias FadeOut Level]
0,00… 400,00 (Hz) 0,00 No
b060 Impostazione tempo di dissolvenza compensazione di coppia[Trq.bias FadeOut Time]
0,01… 5,00 (s) 0,01 No
b069 Guadagno compensazione scorrimento con VC, primo motore[Slip-Cmp. gain, 1st]
0… 255 (%) 100 Sì
b070 Errore di verifica contattore aperto[Separated Cont.-err]
00: Err (errore normale) 00 No01: Seq-Err (errore sequenza)02: Errore silenzioso
b071 Errore di verifica freno scollegato[Separated Brake-err]
00: Err (errore normale) 00 No01: Seq-Err (errore sequenza)02: Errore silenzioso
b072 Nessun errore di ingresso NFS aperto[Separated NFS-err]
00: Err (errore normale) 00 No01: Seq-Err (errore sequenza)02: Errore silenzioso
b074 Errore RUN aperto attivo sul GS[Separated RUN timing]
00: Err (errore normale) 00 No01: Seq-Err (errore sequenza)02: Errore silenzioso
b075 Errore di timeout ascensore aperto[Separated Lift timeout]
00: Err (errore normale) 00 No01: Seq-Err (errore sequenza)02: Errore silenzioso
b076 Impostazione tempo di timeout spostamento ascensore[Lift timeout time]
0,00… 10,00 (s) 5,00 No
b077 Impostazione livello di timeout spostamento ascensore[Lift timeout Lvl.]
0,00… 400,00 (Hz) 0,00 OK No
Codice di visua-
lizza-zione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefi-nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modi-fica
durante la mar-
cia

90
Tabella dei parametri Sezione 8-2
b078 Errore di condizione freno aperto[Separated Brake cond.]
00: Err (errore normale) 00 No01: Seq-Err (errore sequenza)02: Errore silenzioso
b090 Controllo ventola di raffreddamento[Cooling Fan control]
00: OFF (funzionamento della ventola continuo)
02 Sì
01: ON (funzionamento della ventola solo durante il funzionamento dell'inverter ([inclusi 5 min dopo l'accensione e lo spegnimento))02: Thm (la temperatura della ventola aumenta)
b095 Controllo frenatura dinamica[DynamicBrake control]
00: OFF 02 Sì01: ON_STPOFF (disabilitazione mentre il motore è fermo)02: ON_STPON (abilitazione mentre il motore è fermo)
b096 Livello di attivazione frenatura dinamica[DynamicBrake Act. Lv]
Classe 200 V: 330… 380 (V) 360/720 SìClasse 400 V: 660… 760 (V)
b097 Percentuale di utilizzo frenatura dinamica[DynamicBrake %ED]
0,0… 100,0 (%) 100,0 Sì
b098 Termistore per controllo protezione termica[Thermistor control]
00: OFF (disabilitazione del termistore)
00 Sì
01: PTC (abilitazione del termistore con PTC)02: NTC (abilitazione del termistore con NTC)
b099 Impostazione livello di protezione termica[Thm. protection Level]
0… 9.999 (Ω) 3000 Sì
b212 Impostazione livello termico elettronico, secondo motore[E-thermal Level, 2nd]
0,2 x Corrente nominale a 1,0 x Corrente nominale (A)
Corrente nominale
Sì
b213 Caratteristiche termiche elettroniche, secondo motore[E-thermal Char, 2nd]
00: Reduce (caratteristica coppia ridotta)
01 Sì
01: Const (caratteristica coppia costante)02: Free (impostazione libera)
b269 Guadagno compensazione scorrimento con VC, secondo motore[Slip-Cmp. gain, 2nd]
0… 255 (%) 100 Sì
Codice di visua-
lizza-zione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefi-nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modi-fica
durante la mar-
cia
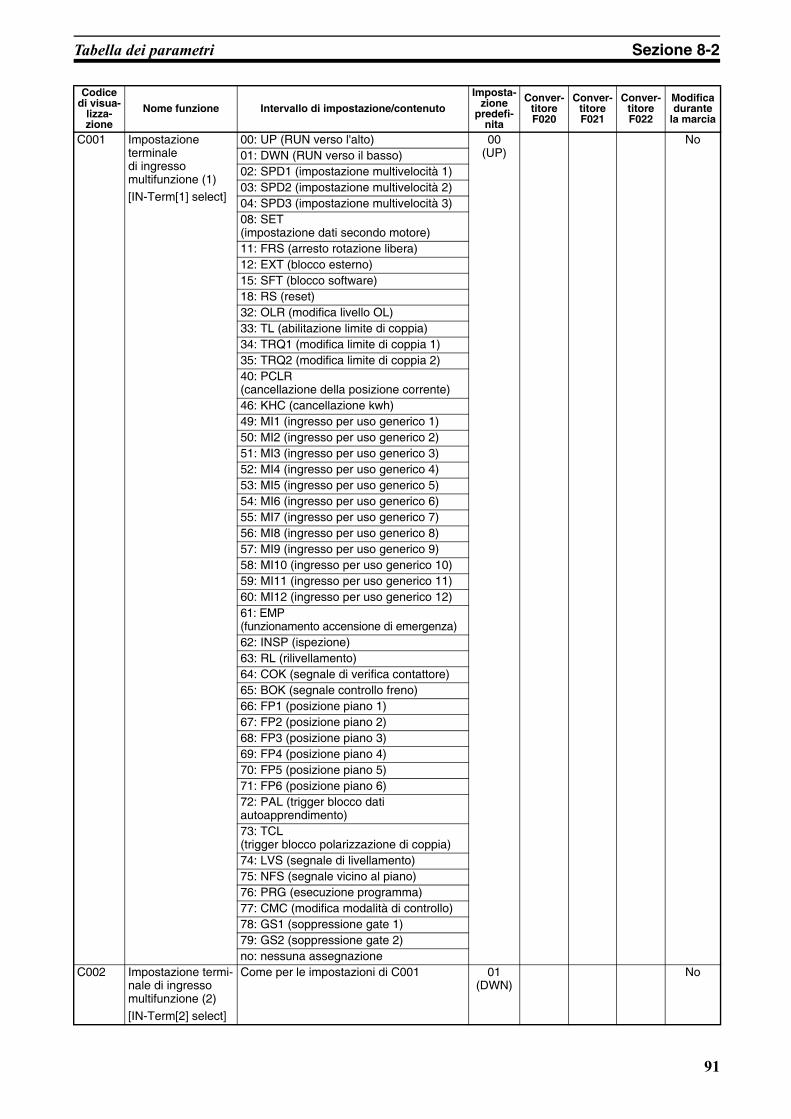
91
Tabella dei parametri Sezione 8-2
Codice di visua-
lizza-zione
Nome funzione Intervallo di impostazione/contenutoImposta-
zione predefi-
nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modifica durante
la marcia
C001 Impostazione terminale di ingresso multifunzione (1)[IN-Term[1] select]
00: UP (RUN verso l'alto) 00 (UP)
No01: DWN (RUN verso il basso)02: SPD1 (impostazione multivelocità 1)03: SPD2 (impostazione multivelocità 2)04: SPD3 (impostazione multivelocità 3)08: SET (impostazione dati secondo motore)11: FRS (arresto rotazione libera)12: EXT (blocco esterno)15: SFT (blocco software)18: RS (reset)32: OLR (modifica livello OL)33: TL (abilitazione limite di coppia)34: TRQ1 (modifica limite di coppia 1)35: TRQ2 (modifica limite di coppia 2)40: PCLR (cancellazione della posizione corrente)46: KHC (cancellazione kwh)49: MI1 (ingresso per uso generico 1)50: MI2 (ingresso per uso generico 2)51: MI3 (ingresso per uso generico 3)52: MI4 (ingresso per uso generico 4)53: MI5 (ingresso per uso generico 5)54: MI6 (ingresso per uso generico 6)55: MI7 (ingresso per uso generico 7)56: MI8 (ingresso per uso generico 8)57: MI9 (ingresso per uso generico 9)58: MI10 (ingresso per uso generico 10)59: MI11 (ingresso per uso generico 11)60: MI12 (ingresso per uso generico 12)61: EMP (funzionamento accensione di emergenza)62: INSP (ispezione)63: RL (rilivellamento)64: COK (segnale di verifica contattore)65: BOK (segnale controllo freno)66: FP1 (posizione piano 1)67: FP2 (posizione piano 2)68: FP3 (posizione piano 3)69: FP4 (posizione piano 4)70: FP5 (posizione piano 5)71: FP6 (posizione piano 6)72: PAL (trigger blocco dati autoapprendimento)73: TCL (trigger blocco polarizzazione di coppia)74: LVS (segnale di livellamento)75: NFS (segnale vicino al piano)76: PRG (esecuzione programma)77: CMC (modifica modalità di controllo)78: GS1 (soppressione gate 1)79: GS2 (soppressione gate 2)no: nessuna assegnazione
C002 Impostazione termi-nale di ingresso multifunzione (2)[IN-Term[2] select]
Come per le impostazioni di C001 01 (DWN)
No

92
Tabella dei parametri Sezione 8-2
C003 Impostazione termi-nale di ingresso multifunzione (3)[IN-Term[3] select]
Come per le impostazioni di C001 03 (SPD2)
No
C004 Impostazione termi-nale di ingresso multifunzione (4)[IN-Term[4] select]
Come per le impostazioni di C001 62 (INSP)
No
C005 Impostazione termi-nale di ingresso multifunzione (5)[IN-Term[5] select]
Come per le impostazioni di C001 74 (LVS)
No
C006 Impostazione termi-nale di ingresso multifunzione (6)[IN-Term[6] select]
Come per le impostazioni di C001 18 (RS)
No
C007 Impostazione termi-nale di ingresso multifunzione (7)[IN-Term[7] select]
Come per le impostazioni di C001 63 (RL)
No
C008 Impostazione termi-nale di ingresso mul-tifunzione (GS1)[IN-Term[GS1] select]
Come per le impostazioni di C001 78 (GS1)
No
C009 Impostazione termi-nale di ingresso mul-tifunzione (GS2)[IN-Term[GS2] select]
Come per le impostazioni di C001 79 (GS2)
No
C011 Stato attivazione terminale (1)[IN-Term[1] NO/NC]
00: NO (normal. aperto) 00 No01: NC (normal. chiuso)
C012 Stato attivazione terminale (2)[IN-Term[2] NO/NC]
00: NO (normal. aperto) 00 No01: NC (normal. chiuso)
C013 Stato attivazione terminale (3)[IN-Term[3] NO/NC]
00: NO (normal. aperto) 00 No01: NC (normal. chiuso)
C014 Stato attivazione terminale (4)[IN-Term[4] NO/NC]
00: NO (normal. aperto) 00 No01: NC (normal. chiuso)
C015 Stato attivazione terminale (5)[IN-Term[5] NO/NC]
00: NO (normal. aperto) 00 No01: NC (normal. chiuso)
C016 Stato attivazione terminale (6)[IN-Term[6] NO/NC]
00: NO (apertura normale) 00 No01: NC (chiusura normale)
C017 Stato attivazione terminale (7)[IN-Term[7] NO/NC]
00: NO (normal. aperto) 00 No01: NC (normal. chiuso)
C018 Stato attivazione terminale (GS1)[IN-Term[GS1] NO/NC]
00: NO (normal. aperto) 00 No01: NC (normal. chiuso)
C019 Stato attivazione terminale (GS2)[IN-Term[GS2] NO/NC]
00: NO (normal. aperto) 00 No01: NC (normal. chiuso)
Codice di visua-
lizza-zione
Nome funzione Intervallo di impostazione/contenutoImposta-
zione predefi-
nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modifica durante
la marcia

93
Tabella dei parametri Sezione 8-2
C021 Impostazione relè di uscita multifunzione (11)[OUT-Term[11] select]
00: RUN (in esecuzione) 52 (BRK)
No01: FA1 (velocità costante raggiunta)02: FA2 (frequenza impostata superata)03: OL (segnale di sovraccarico avanzato (1))05: AL (segnale di allarme)06: FA3 (frequenza impostata raggiunta)07: OTQ (sovra coppia)08: IP (errore di alimentazione istantanea)09: UV (sottotensione)10: TRQ (coppia limitata)11: RNT (superamento del tempo di funzionamento)12: ONT (superamento del tempo di plugin)13: THM (segnale di allarme termico (MTR))14: ZS (segnale rilevamento 0 Hz)16: POK (posizionamento completato)17: FA4 (frequenza impostata superata 2)18: FA5 (frequenza impostata raggiunta 2)19: OL2 (segnale di sovraccarico avanzato 2)20: TH-C (segnale di allarme termico (CTL))23: NDc (disconnessione di rete)30: WAC (avviso durata condensatore)31: WAF (caduta velocità ventola di raffreddamento)32: FR (segnale contatto di avvio)33: OHF (avvertenza di surriscaldamento del dissipatore)34: LOC (segnale di indicazione corrente bassa)35: MO1 (uscita per uso generico 1)36: MO2 (uscita per uso generico 2)37: MO3 (uscita per uso generico 3)38: MO4 (uscita per uso generico 4)39: MO5 (uscita per uso generico 5)40: MO6 (uscita per uso generico 6)41: MO7 (uscita per uso generico 7)44: IRDY (inverter pronto)45: FWR (rotazione in avanti)46: RWR (rotazione indietro)47: MJA (errore grave)51: CON (segnale di controllo contattore)52: BRK (segnale controllo freno)54: UPS (stato ricerca direzione di protezione UPS)55: UPD (direzione di protezione UPS)56: GMON (monitoraggio soppressione gate)57: MPS (ricerca della posizione del polo magnetico)58: SEQ (errore SEQ)
C022 Impostazione relè di uscita multifunzione (12)[OUT-Term[12] select]
Come per le impostazioni di C021 51 (CON)
No
Codice di visua-
lizza-zione
Nome funzione Intervallo di impostazione/contenutoImposta-
zione predefi-
nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modifica durante
la marcia

94
Tabella dei parametri Sezione 8-2
C023 Impostazione relè di uscita multifunzione (13)[OUT-Term[13] select]
Come per le impostazioni di C021 44 (IRDY)
No
C026 Impostazione relè di uscita multifunzione (RY)[OUT-Term[RY] select]
Come per le impostazioni di C021 05 (AL)
No
C027 Selezione segnale[FM][[FM] Signal Select]
00: A-S (velocità di uscita) 00 No01: A (corrente di uscita)02: T (coppia di uscita)03: D-F (velocità di uscita digitale)04: Vout (tensione di uscita)05: Power (alimentazione di ingresso)06: THM (sovraccarico termico elettronico: MTR)07: LAD-S (velocità LAD)09: TH-Mtr (temperatura del motore)10: TH-Fin (temperatura dissipatore)12: Devi (deviazione encoder)13: THM-CTL (sovraccarico termico elettronico: CTL)14: YA0 (uscita per uso generico YA0)
C028 Selezione segnale[AM][[AM] Signal Select]
00: A-S (velocità di uscita) 00 No01: A (corrente di uscita)02: T (coppia di uscita)04: Vout (tensione di uscita)05: Power (alimentazione di ingresso)06: THM (sovraccarico termico elettronico: MTR)07: LAD-S (velocità LAD)09: TH-Mtr (temperatura del motore)10: TH-Fin (temperatura dissipatore)12: Devi (deviazione encoder)13: THM-CTL (sovraccarico termico elettronico: CTL)15: YA1 (uscita per uso generico YA1)
C029 Selezione segnale [AMI][[AMI] Signal Select]
00: A-S (velocità di uscita) 01 No01: A (corrente di uscita)02: T (coppia di uscita)04: Vout (tensione di uscita)05: Power (alimentazione di ingresso)06: THM (sovraccarico termico elettronico: MTR)07: LAD-S (velocità LAD)09: TH-Mtr (temperatura del motore)10: TH-Fin (temperatura dissipatore)12: Devi (deviazione encoder)13: THM-CTL (sovraccarico termico elettronico: CTL)16: YA2 (uscita per uso generico YA2)
C030 Valore massimo monitoraggio deviazione encoder[ENC. dev monitor Max]
0… 99.999 (mm) 1000 Sì
Codice di visua-
lizza-zione
Nome funzione Intervallo di impostazione/contenutoImposta-
zione predefi-
nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modifica durante
la marcia
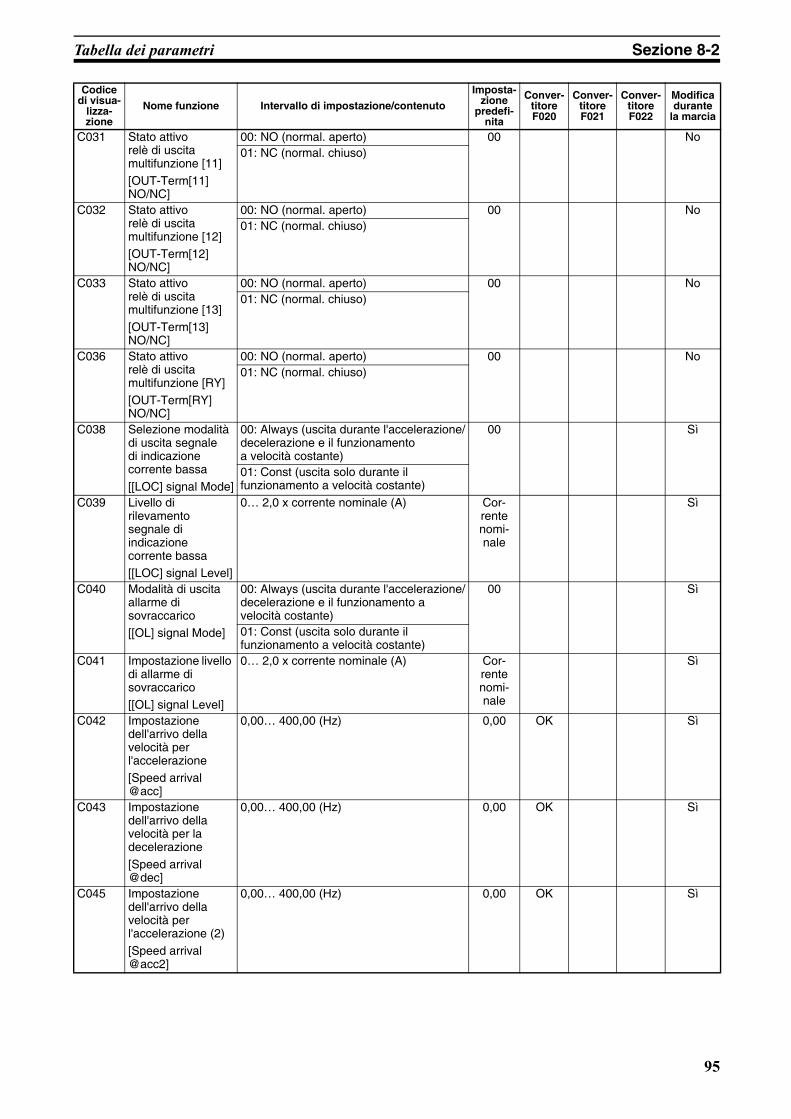
95
Tabella dei parametri Sezione 8-2
C031 Stato attivo relè di uscita multifunzione [11][OUT-Term[11] NO/NC]
00: NO (normal. aperto) 00 No01: NC (normal. chiuso)
C032 Stato attivo relè di uscita multifunzione [12][OUT-Term[12] NO/NC]
00: NO (normal. aperto) 00 No01: NC (normal. chiuso)
C033 Stato attivo relè di uscita multifunzione [13][OUT-Term[13] NO/NC]
00: NO (normal. aperto) 00 No01: NC (normal. chiuso)
C036 Stato attivo relè di uscita multifunzione [RY][OUT-Term[RY] NO/NC]
00: NO (normal. aperto) 00 No01: NC (normal. chiuso)
C038 Selezione modalità di uscita segnale di indicazione corrente bassa[[LOC] signal Mode]
00: Always (uscita durante l'accelerazione/decelerazione e il funzionamento a velocità costante)
00 Sì
01: Const (uscita solo durante il funzionamento a velocità costante)
C039 Livello di rilevamento segnale di indicazione corrente bassa[[LOC] signal Level]
0… 2,0 x corrente nominale (A) Cor-rente nomi-nale
Sì
C040 Modalità di uscita allarme di sovraccarico[[OL] signal Mode]
00: Always (uscita durante l'accelerazione/decelerazione e il funzionamento a velocità costante)
00 Sì
01: Const (uscita solo durante il funzionamento a velocità costante)
C041 Impostazione livello di allarme di sovraccarico[[OL] signal Level]
0… 2,0 x corrente nominale (A) Cor-rente nomi-nale
Sì
C042 Impostazione dell'arrivo della velocità per l'accelerazione[Speed arrival @acc]
0,00… 400,00 (Hz) 0,00 OK Sì
C043 Impostazione dell'arrivo della velocità per la decelerazione[Speed arrival @dec]
0,00… 400,00 (Hz) 0,00 OK Sì
C045 Impostazione dell'arrivo della velocità per l'accelerazione (2)[Speed arrival @acc2]
0,00… 400,00 (Hz) 0,00 OK Sì
Codice di visua-
lizza-zione
Nome funzione Intervallo di impostazione/contenutoImposta-
zione predefi-
nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modifica durante
la marcia

96
Tabella dei parametri Sezione 8-2
C046 Impostazione dell'arrivo della velocità per la decelerazione (2)[Speed arrival @dec2]
0,00… 400,00 (Hz) 0,00 OK Sì
C055 Impostazione livello sovra coppia (azionamento verso l'alto)[OverTrq Lv. @UP-Drv]
0… 300 (%) 100 Sì
C056 Impostazione livello sovra coppia (rigenerazione verso il basso)[OverTrq Lv. @DWN-Rgn]
0… 300 (%) 100 Sì
C057 Impostazione livello sovra coppia (azionamento verso il basso)[OverTrq Lv. @DWN-Drv]
0… 300 (%) 100 Sì
C058 Impostazione livello sovra coppia (rigenerazione verso l'alto)[OverTrq Lv. @UP-Rgn]
0… 300 (%) 100 Sì
C060 Tempo di avvertenza esecuzione/accensione[Run/Pw-on warn time]
0… 655.350 (h) 0 Sì
C061 Impostazione livello di avvertenza termico elettronico (motore)[E-thm warn Level Mtr]
0… 100 (%) 80 Sì
C062 Impostazione livello di avvertenza termico elettronico (unità di controllo)[E-thm warn Level Ctl]
0… 100 (%) 80 Sì
C063 Livello di rilevamento velocità zero[Zero-spd detect Level]
0,00… 100,00 (Hz) 0,00 OK Sì
C064 Livello di avvertenza di surriscaldamento del dissipatore[Heatsnk Overheat Level]
0… 200 (°C) 120 Sì
Codice di visua-
lizza-zione
Nome funzione Intervallo di impostazione/contenutoImposta-
zione predefi-
nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modifica durante
la marcia

97
Tabella dei parametri Sezione 8-2
C071 Selezione velocità di comunicazione[Comm. BauRate]
03: 2.400 bps 04 No04: 4.800 bps05: 9.600 bps06: 19.200 bps07: 38.400 bps
C072 Assegnazione nodo[Comm. Node]
1… 247 1 No
C074 Selezione parità di comunicazione[Comm. Parity]
00: NO (nessuna parità) 00 No01: EVN (parità pari)02: ODD (parità dispari)
C075 Selezione bit di arresto delle comunicazioni[Comm. StopBit]
1: 1 bit 1 No2: 2 bit
C076 Selezione del funzionamento dopo l'errore di comunicazione[Comm. ErrMode]
00: Errore 02 No01: STP-Err (errore dopo decelerazione e arresto del motore)02: Ignor (ignora errori)04: Dec-STP (decelerazione e arresto del motore)
C077 Limite di timeout delle comunicazioni prima dell'allarme[Comm. TimeOut]
0,00… 99,99 (s) 0,00 No
C078 Tempo attesa comunicazione[Comm. Wait time]
0… 1.000 (ms) 0 No
C079 Selezione modalità di comunicazione[Comm. Mode select]
01: Modbus (Modbus-RTU) 01 No
C081 Calibrazione scansione ingresso [O][Adj. span [O]]
0… 65.535 Impo-sta-
zione di fabbrica
Sì
C082 Calibrazione scansione ingresso [OI][Adj. span [OI]]
0… 65.535 Sì
C083 Calibrazione scansione ingresso [O2][Adj. span [O2]]
0… 65.535 Sì
C085 Regolazione ingresso termistore[Adj. tmp [TH]]
0,0… 1.000,0 Sì
C091 Abilitazione modalità debug[Debug mode]
00: MD0 00 Sì01: MD1
C105 Regolazione del guadagno FM[[FM] gain adjust]
50… 200 (%) 100 Sì
C106 Regolazione del guadagno AM[[AM] gain adjust]
50… 200 (%) 100 Sì
C107 Regolazione del guadagno AMI[[AMI] gain adjust]
50… 200 (%) 100 Sì
Codice di visua-
lizza-zione
Nome funzione Intervallo di impostazione/contenutoImposta-
zione predefi-
nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modifica durante
la marcia

98
Tabella dei parametri Sezione 8-2
C109 Regolazione polarizzazione AM[[AM] bias adjust]
0… 100 (%) 0 Sì
C110 Regolazione polarizzazione AMI[[AMI] bias adjust]
0… 100 (%) 20 Sì
C111 Impostazione livello di allarme di sovraccarico (2)[[OL2] signal Level]
0,0… 2,0 x corrente nominale (A) Cor-rente nomi-nale
Sì
C121 Calibrazione ingresso zero [O][Adj. zero [O]]
0… 65.535 Impo-sta-
zione di fabbrica
Sì
C122 Calibrazione ingresso zero [OI][Adj. zero [OI]]
0… 65.535 Sì
C123 Calibrazione ingresso zero [O2][Adj. zero [O2]]
0… 65.535 Sì
C130 Tempo di ritardo all'eccitazione uscita [11][ON-delay time [11]]
0,0… 100,0 (s) 0,0 Sì
C131 Tempo di ritardo alla diseccitazione uscita [11][OFF-delay time [11]]
0,0… 100,0 (s) 0,0 Sì
C132 Tempo di ritardo all'eccitazione uscita [12][ON-delay time [12]]
0,0… 100,0 (s) 0,0 Sì
C133 Tempo di ritardo alla diseccitazione uscita [12][OFF-delay time [12]]
0,0… 100,0 (s) 0,0 Sì
C134 Tempo di ritardo all'eccitazione uscita [13][ON-delay time [13]]
0,0… 100,0 (s) 0,0 Sì
C135 Tempo di ritardo alla diseccitazione uscita [13][OFF-delay time [13]]
0,0… 100,0 (s) 0,0 Sì
C140 Tempo di ritardo all'eccitazione uscita [RY][ON-delay time [RY]]
0,0… 100,0 (s) 0,0 Sì
C141 Tempo di ritardo alla diseccitazione uscita [RY][OFF-delay time [RY]]
0,0… 100,0 (s) 0,0 Sì
C160 Tempo di risposta terminale ingresso [1][Response time [1]]
0… 200 (ms) 1 Sì
Codice di visua-
lizza-zione
Nome funzione Intervallo di impostazione/contenutoImposta-
zione predefi-
nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modifica durante
la marcia

99
Tabella dei parametri Sezione 8-2
C161 Tempo di risposta terminale ingresso [2][Response time [2]]
0… 200 (ms) 1 Sì
C162 Tempo di risposta terminale ingresso [3][Response time [3]]
0… 200 (ms) 1 Sì
C163 Tempo di risposta terminale ingresso [4][Response time [4]]
0… 200 (ms) 1 Sì
C164 Tempo di risposta terminale ingresso [5][Response time [5]]
0… 200 (ms) 1 Sì
C165 Tempo di risposta terminale ingresso [6][Response time [6]]
0… 200 (ms) 1 Sì
C166 Tempo di risposta terminale ingresso [7][Response time [7]]
0… 200 (ms) 1 Sì
C167 Tempo di risposta terminale ingresso [GS1][Response time [GS1]]
0… 200 (ms) 1 Sì
C168 Tempo di risposta terminale ingresso [GS2][Response time [GS2]]
0… 200 (ms) 1 Sì
C169 Tempo di determinazione velocità/posizione multiphase[M. Spd/Pos latch time]
0… 200 (ms) 0 Sì
Codice di visua-
lizza-zione
Nome funzione Intervallo di impostazione/contenutoImposta-
zione predefi-
nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modifica durante
la marcia

100
Tabella dei parametri Sezione 8-2
Codice di visua-
lizza-zione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefi-nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modi-fica
durante la mar-
ciaH001 Impostazione autotuning
[Auto-tuning Mode set.]00: NOR (disabilitato) 00 No01: NRT-IM (autotuning senza rotazione (IM))02: AUT-IM (autotuning con rotazione (IM))03: NRT-PM (autotuning senza rotazione (PM))04: AUT-PM (autotuning con rotazione (PM))05: MG-POS (tuning offset di posizione del magnete (PM))
H002 Sorgente comando RUN all'autotuning[RUN @Auto- tuning]
00: REM (Forza tasto “RUN”) 00 No01: A002 (impostazioni tramite A002)
H003 Potenza del motore, primo motore[Motor capacity, 1st]
0,20… 75,00 (kW) Stesso INV (kW)
No
H004 Impostazione dei poli del motore, primo motore[Motor poles, 1st]
2… 48 (poli) 4 No
H005 Costante rigidità, primo motore[Rigidity constant, 1st]
0,1… 5.000,0 (%) 100,0 Sì
H006 Costante stabilizzazione motore, primo motore[Stabilize cnst, 1st]
0… 255 (%) 100 Sì
H007 Velocità di commutazione guadagno ASR[ASR gain switch speed]
0,00… 400,00 (Hz) 0,00 OK Sì
H008 Guadagno proporzionale ASR all'avvio[ASR P-gain @start]
0,0… 1.000,0 (%) 100,0 Sì
H009 Guadagno integrale ASR all'avvio[ASR I-gain @start]
0,0… 1.000,0 (%) 100,0 Sì
H010 Guadagno proporzionale ASR dopo la commutazione[ASR P-gain @after SW]
0,0… 1.000,0 (%) 100,0 Sì
H011 Guadagno integrale ASR dopo la commutazione[ASR I-gain @after SW]
0,0… 1.000,0 (%) 100,0 Sì
H012 Guadagno proporzionale ASR a velocità zero[ASR P-gain @stop]
0,0… 1.000,0 (%) 100,0 Sì
H013 Guadagno integrale ASR a velocità zero[ASR I-gain @stop]
0,0… 1.000,0 (%) 100,0 Sì
H014 Guadagno proporzionale ASR alla frenata[ASR P-gain @brake]
0,0… 1.000,0 (%) 100,0 Sì

101
Tabella dei parametri Sezione 8-2
H015 Guadagno proporzionale ASR all'impostazione del tempo di dissolvenza del freno[Gain FadeOut Time]
0,01… 5,00 (s) 0,01 No
H016 Impostazione guadagno anello di posizione alla frenata[P-loop gain @brake]
0,00… 100,00 0,50 Sì
H017 Regolazione del guadagno ACR con IM-OLV (con C091=1)[ACR gain @IM-OLV]
1… 10.000 150 No
H018 Regolazione del guadagno ACR con IM-CLV[ACR gain @IM-CLV]
1… 10.000 2.000 No
H019 Regolazione del guadagno ACR con PM-OLV[ACR gain @PM-OLV]
1… 10.000 500 No
H020 Costante R1 motore IM, primo motore[IM constant R1, 1st]
0,001… 65,535 (Ω) Dipende dalla
capacità del
motore
No
H021 Costante R2 motore IM, primo motore[IM constant R2, 1st]
0,001… 65,535 (Ω) No
H022 Costante L motore IM, primo motore[IM constant L, 1st]
0,01… 655,35 (mH) No
H023 Costante IO motore IM, primo motore[IM constant IO, 1st]
0,01… 655,35 (A) No
H024 Costante J motore IM, primo motore[IM constant J, 1st]
0,001… 9.999,000 No
H025 Corrente nominale motore IM, primo motore[IM cnst. Rated-I, 1st]
0,0… 200,0 (A) No
H060 Limite 0Hz-OLV, primo motore[0Hz OLV-Limit, 1st]
0,0… 100,0 (%) 75,0 Sì
Codice di visua-
lizza-zione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefi-nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modi-fica
durante la mar-
cia
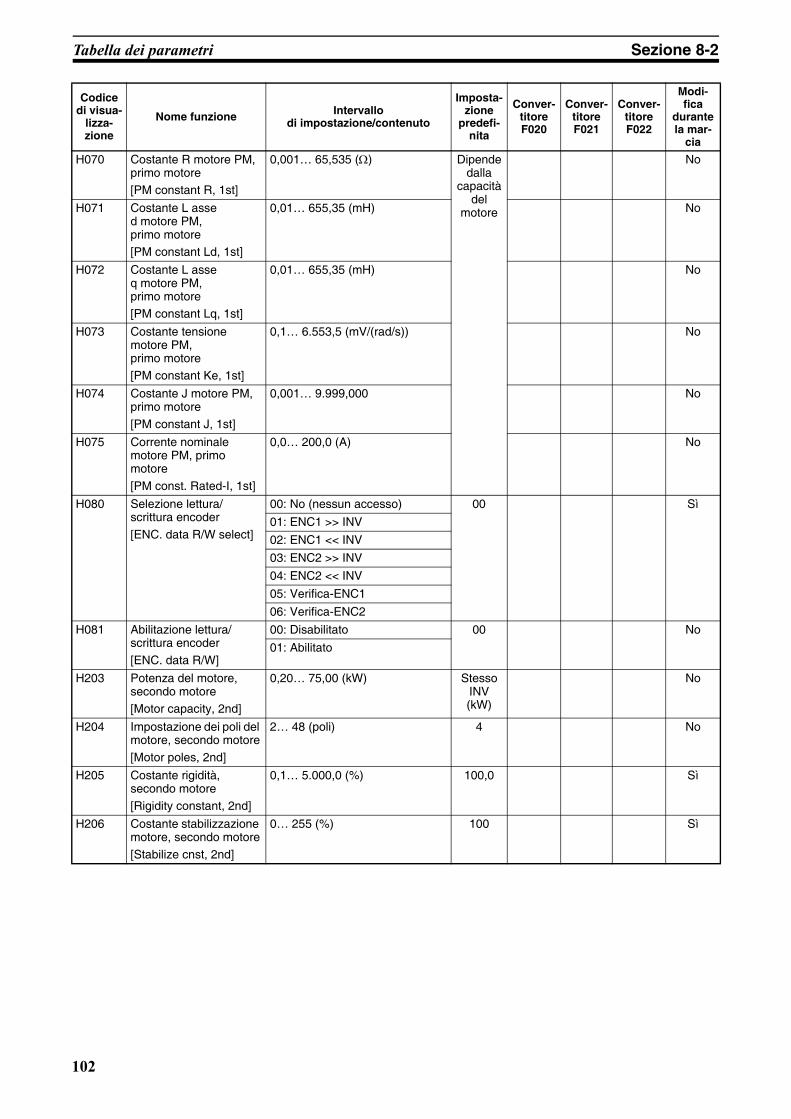
102
Tabella dei parametri Sezione 8-2
H070 Costante R motore PM, primo motore[PM constant R, 1st]
0,001… 65,535 (Ω) Dipende dalla
capacità del
motore
No
H071 Costante L asse d motore PM, primo motore[PM constant Ld, 1st]
0,01… 655,35 (mH) No
H072 Costante L asse q motore PM, primo motore[PM constant Lq, 1st]
0,01… 655,35 (mH) No
H073 Costante tensione motore PM, primo motore[PM constant Ke, 1st]
0,1… 6.553,5 (mV/(rad/s)) No
H074 Costante J motore PM, primo motore[PM constant J, 1st]
0,001… 9.999,000 No
H075 Corrente nominale motore PM, primo motore[PM const. Rated-I, 1st]
0,0… 200,0 (A) No
H080 Selezione lettura/scrittura encoder[ENC. data R/W select]
00: No (nessun accesso) 00 Sì01: ENC1 >> INV02: ENC1 << INV03: ENC2 >> INV04: ENC2 << INV05: Verifica-ENC106: Verifica-ENC2
H081 Abilitazione lettura/scrittura encoder[ENC. data R/W]
00: Disabilitato 00 No01: Abilitato
H203 Potenza del motore, secondo motore[Motor capacity, 2nd]
0,20… 75,00 (kW) Stesso INV (kW)
No
H204 Impostazione dei poli del motore, secondo motore[Motor poles, 2nd]
2… 48 (poli) 4 No
H205 Costante rigidità, secondo motore[Rigidity constant, 2nd]
0,1… 5.000,0 (%) 100,0 Sì
H206 Costante stabilizzazione motore, secondo motore[Stabilize cnst, 2nd]
0… 255 (%) 100 Sì
Codice di visua-
lizza-zione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefi-nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modi-fica
durante la mar-
cia

103
Tabella dei parametri Sezione 8-2
H220 Costante R1 motore IM, secondo motore[IM constant R1, 2nd]
0,001… 65,535 (Ω) Dipende dalla
capacità del
motore
No
H221 Costante R2 motore IM, secondo motore[IM constant R2, 2nd]
0,001… 65,535 (Ω) No
H222 Costante L motore IM, secondo motore[IM constant L, 2nd]
0,01… 655,35 (mH) No
H223 Costante IO motore IM, secondo motore[IM constant IO, 2nd]
0,01… 655,35 (A) No
H224 Costante J motore IM, secondo motore[IM constant J, 2nd]
0,001… 9.999,000 No
H225 Corrente nominale motore IM, secondo motore[IM cnst. Rated-I, 2nd]
0,0… 200,0 (A) No
H260 Limite 0Hz-OLV, secondo motore[0Hz OLV-Limit, 2nd]
0,0… 100,0 (%) 75,0 Sì
H270 Costante R motore PM, secondo motore[PM constant R, 2nd]
0,001… 65,535 (Ω) Dipende dalla
capacità del
motore
No
H271 Costante L asse d motore PM, secondo motore[PM constant Ld, 2nd]
0,01… 655,35 (mH) No
H272 Costante L asse q motore PM, secondo motore[PM constant Lq, 2nd]
0,01… 655,35 (mH) No
H273 Costante tensione motore PM, secondo motore[PM constant Ke, 2nd]
0,1… 6.553,5 (mV/(rad/s)) No
H274 Costante J motore PM, secondo motore[PM constant J, 2nd]
0,001… 9.999,000 No
H275 Corrente nominale motore PM, secondo motore[PM const. Rated-I, 2nd]
0,0… 200,0 (A) No
Codice di visua-
lizza-zione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefi-nita
Conver-titore F020
Conver-titore F021
Conver-titore F022
Modi-fica
durante la mar-
cia

104
Tabella dei parametri Sezione 8-2
Codice di
visualiz-zazione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefi-nita
Con-verti-tore F020
Con-verti-tore F021
Con-verti-tore F022
Modi-fica
durante la mar-
ciaP001 Errore modalità di
funzionamento su scheda opzionale 1[OP1 Operation Mode]
00: ERR (Errore) 00 No01: RUN (Ignora errore (in esecuzione))
P002 Errore modalità di funzionamento su scheda opzionale 2[OP2 Operation Mode]
00: ERR (Errore) 00 No01: RUN (Ignora errore (in esecuzione))
P003 Impostazione automatica dei parametri per l'encoder[Enc. Param. Auto-Set]
00: Disabilitato 01 No01: Abilitato
P004 Selezione sorgente retroazione della velocità del primo motore[SPD-FB Source Sel, 1st]
00: non (non utilizzato) 00 No01: ch1-inc (incrementale (CH1))02: ch1-HIPER (HIPERFACE (CH1))03: ch1-En2.1 (EnDat 2.1 (CH1))04: ch1-En2.2 (EnDat 2.2 (CH1))05: ch2-inc (incrementale (CH2))06: ch2-HIPER (HIPERFACE (CH2))07: ch2-En2.1 (EnDat 2.1 (CH2))08: ch2-En2.2 (EnDat 2.2 (CH2))
P005 Selezione sorgente retroazione della posizione del primo motore[POS-FB Source Sel, 1st]
00: non (non utilizzato) 00 No01: ch1-inc (incrementale (CH1))02: ch1-HIPER (HIPERFACE (CH1))03: ch1-En2.1 (EnDat 2.1 (CH1))04: ch1-En2.2 (EnDat 2.2 (CH1))05: ch2-inc (incrementale (CH2))06: ch2-HIPER (HIPERFACE (CH2))07: ch2-En2.1 (EnDat 2.1 (CH2))08: ch2-En2.2 (EnDat 2.2 (CH2))
P010 CH1-Impostazione della costante ENC[ENC. Constant (ch1)]
0,128… 65.535 (/rev) 1.024 No
P011 CH1-Impostazione della risoluzione ENC[ENC. Resolution (ch1)]
0… 31 (bit/rev) 0 No
P012 CH1-Offset posizione magnete ENC (PM)[ENC. MgPos- offset (ch1)]
0… 360 (°) 60 No
P013 CH1-Giri ENC[ENC. Revolution (ch1)]
0… 16 (bit) 0 No
P014 CH1-Numeratore del rapporto di riduzione elettronico[ENC. Gear ratio N (ch1)]
1… 9.999 1 No
P015 CH1-Denominatore del rapporto di riduzione elettronico[ENC. Gear ratio D (ch1)]
1… 9.999 1 No
P016 CH1-Posizione ENC[ENC. Position set (CH1)]
00: Diretta (fase A principale) 00 No01: Indietro (fase B principale)

105
Tabella dei parametri Sezione 8-2
P020 Impostazione della costante di CH2-ENC[ENC. Constant (ch2)]
0,128… 65.535 (/rev) 1.024 No
P021 Impostazione della risoluzione di CH2-ENC[ENC. Resolution (ch2)]
0… 31 (bit/rev) 0 No
P022 Offset posizione magnete CH2-ENC (PM)[ENC. MgPos- offset (ch2)]
0… 360 (°) 60 No
P023 Giri CH2-ENC[ENC. Revolution (ch2)]
0… 16 (bit) 0 No
P024 Rapporto di riduzione CH2-Numeratore del motore[ENC. Gear ratio N (ch2)]
1… 9.999 1 No
P025 Rapporto di riduzione CH2-Denominatore del motore[ENC. Gear ratio D (ch2)]
1… 9.999 1 No
P026 Posizione ENC-CH2[ENC. Position set (CH2)]
00: Diretta (fase A principale) 00 No01: Indietro (fase B principale)
P030 Impostazione gamma del posizionamento completato[POS-Completion range]
0… 10.000 5 No
P032 Impostazione guadagno anello di posizione[Position loop gain]
0,00… 100,00 0,50 Sì
P035 Ritardo rilevamento scollegamento encoder[ENC. discon delay time]
0,0… 5,0 (s) 0,5 Sì
P038 Impostazione livello di rilevamento errore sovravelocità[OverSpd. detect level]
0,0… 150,0 (%) 120,0 Sì
P039 Impostazione tempo di rilevamento errore sovravelocità[OverSpd. detect time]
0,0… 5,0 (s) 0,2 Sì
P040 Impostazione livello di rilevamento errore deviazione velocità[Spd dev. detect level]
0,0… 100,0 (%) 15,0 Sì
P041 Impostazione tempo di rilevamento errore deviazione velocità[Spd dev. detect time]
0,0… 5,0 (s) 0,5 Sì
P042 Impostazione livello di rilevamento errore accelerazione eccessiva[OverAcc. detect level]
0,0… 50,0 (m/s2) 1,0 Sì
Codice di
visualiz-zazione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefi-nita
Con-verti-tore F020
Con-verti-tore F021
Con-verti-tore F022
Modi-fica
durante la mar-
cia

106
Tabella dei parametri Sezione 8-2
P043 Impostazione tempi di rilevamento errore accelerazione eccessiva[OverAcc. detect time]
0,0… 5,0 (s) 0,3 Sì
P044 Impostazione distanza di rilevamento rotazione errata[Wrong rot detect dis.]
0… 1.000 (mm) 100 Sì
P050… P089
Posizione piano 00… 39[Floor position 00] – [Floor position 39]
–2.147.483.647… 2.147.483.647 0 OK Sì
P090 Selezione modalità di autoapprendimento[Auto-Learn select]
00: Disabilitato 00 No01: ADD (Abilitato (Aggiungi))02: SUB (Abilitato (Sub))
P091 N. posizione iniziale autoapprendimento[Auto-Learn No.]
0… 39 0 No
P092 Selezione trigger autoapprendimento[Auto-Learn trigger]
00: PAL 00 No01: NFS
P093 Offset posizione di autoapprendimento[Auto-Learn offset]
0… 1.073.741.823 0 OK No
P094 Guadagno calcolo della distanza di accelerazione[Acc-t gain @dis. cal]
50,00… 200,00 (%) 100,00 Sì
P095 Guadagno calcolo della distanza di arresto in decelerazione[Dec-t. gain @dis. cal]
50,00… 200,00 (%) 100,00 Sì
P096 Polarizzazione calcolo della distanza di arresto in decelerazione[Bias gain @dis. cal]
0,00… 655,35 (%) 0,00 Sì
P097 Guadagno curva a S per calcolo distanza (con C091=1)[S-trvl. gain @dis. cal]
50,00… 200,00 (%) 100,00 Sì
P098 Limite di velocità in controllo APR[APR limit spd]
0,00… 100,00 (%) 1,00 Sì
P099 Velocità di avvio APR[APR start spd]
0,00… 100,00 (%) 0,20 Sì
P100… P131
Parametro programmazione drive U(00)… U(31)[EzSQ parameter U(00)] – [EzSQ parameter U(31)]
0… 65.535 0 Sì
Codice di
visualiz-zazione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefi-nita
Con-verti-tore F020
Con-verti-tore F021
Con-verti-tore F022
Modi-fica
durante la mar-
cia

107
Tabella dei parametri Sezione 8-2
P140 Ingresso multifunzione [Ex. IN1][ExIN-Term[1] Select]
Come per le impostazioni di C001… C005
No No
P141 Ingresso multifunzione [Ex. IN2][ExIN-Term[2] Select]
No No
P142 Ingresso multifunzione [Ex. IN3][ExIN-Term[3] Select]
No No
P143 Ingresso multifunzione [Ex. IN4][ExIN-Term[4] Select]
No No
P144 Ingresso multifunzione [Ex. IN5][ExIN-Term[5] Select]
No No
P145 Uscita multifunzione [Ex. OUT1][ExOUT-Term[11] Select]
Come per le impostazioni di C021… C023 e C026
No No
P146 Uscita multifunzione [Ex. OUT2][ExOUT-Term[12] Select]
No No
P147 Uscita multifunzione [Ex. OUT3][ExOUT-Term[13] Select]
No No
P150 Stato attivo ingresso multifunzione [Ex. IN1][ExIN-Term[1] NO/NC]
00: NO (normal. aperto) 00 No01: NC (normal. chiuso)
P151 Stato attivo ingresso multifunzione [Ex. IN2][ExIN-Term[2] NO/NC]
00: NO (normal. aperto) 00 No01: NC (normal. chiuso)
P152 Stato attivo ingresso multifunzione [Ex. IN3][ExIN-Term[3] NO/NC]
00: NO (normal. aperto) 00 No01: NC (normal. chiuso)
P153 Stato attivo ingresso multifunzione [Ex. IN4][ExIN-Term[4] NO/NC]
00: NO (normal. aperto) 00 No01: NC (normal. chiuso)
P154 Stato attivo ingresso multifunzione [Ex. IN5][ExIN-Term[5] NO/NC]
00: NO (normal. aperto) 00 No01: NC (normal. chiuso)
P155 Stato attivo uscita multifunzione [Ex. OUT1][ExOUT-Term[11] NO/NC]
00: NO (normal. aperto) 00 No01: NC (normal. chiuso)
P156 Stato attivo uscita multifunzione [Ex. OUT2][ExOUT-Term[12] NO/NC]
00: NO (normal. aperto) 00 No01: NC (normal. chiuso)
P157 Stato attivo uscita multifunzione [Ex. OUT3][ExOUT-Term[13] NO/NC]
00: NO (normal. aperto) 00 No01: NC (normal. chiuso)
Codice di
visualiz-zazione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefi-nita
Con-verti-tore F020
Con-verti-tore F021
Con-verti-tore F022
Modi-fica
durante la mar-
cia

108
Tabella dei parametri Sezione 8-2
P160 Tempo di risposta ingresso multifunzione [Ex. IN1][Response time EX[1]]
0… 200 (ms) 1 Sì
P161 Tempo di risposta ingresso multifunzione [Ex. IN2][Response time EX[2]]
0… 200 (ms) 1 Sì
P162 Tempo di risposta ingresso multifunzione [Ex. IN3][Response time EX[3]]
0… 200 (ms) 1 Sì
P163 Tempo di risposta ingresso multifunzione [Ex. IN4][Response time EX[4]]
0… 200 (ms) 1 Sì
P164 Tempo di risposta ingresso multifunzione [Ex. IN5][Response time EX[5]]
0… 200 (ms) 1 Sì
P170 Tempo di ritardo all'eccitazione uscita multifunzione [Ex. OUT1][ON-delay time Ex[11]]
0,0… 100,0 (s) 0,0 Sì
P171 Tempo di ritardo alla diseccitazione uscita multifunzione [Ex. OUT1][OFF-delay time Ex[11]]
0,0… 100,0 (s) 0,0 Sì
P172 Tempo di ritardo all'eccitazione uscita multifunzione [Ex. OUT2][ON-delay time Ex[12]]
0,0… 100,0 (s) 0,0 Sì
P173 Tempo di ritardo alla diseccitazione uscita multifunzione [Ex. OUT2][OFF-delay time Ex[12]]
0,0… 100,0 (s) 0,0 Sì
P174 Tempo di ritardo all'eccitazione uscita multifunzione [Ex. OUT3][ON-delay time Ex[13]]
0,0… 100,0 (s) 0,0 Sì
P175 Tempo di ritardo alla diseccitazione uscita multifunzione [Ex. OUT3][OFF-delay time Ex[13]]
0,0… 100,0 (s) 0,0 Sì
P204 Selezione sorgente retroazione della velocità del secondo motore[SPD-FB Source Sel, 2nd]
00: non (non utilizzato) 00 No01: ch1-inc (Incrementale (CH1))02: ch1-HIPER (HIPERFACE (CH1))03: ch1-En2.1 (EnDat 2.1 (CH1))04: ch1-En2.2 (EnDat 2.2 (CH1))05: ch2-inc (Incrementale (CH2))06: ch2-HIPER (HIPERFACE (CH2))07: ch2-En2.1 (EnDat 2.1 (CH2))08: ch2-En2.2 (EnDat 2.2 (CH2))
Codice di
visualiz-zazione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefi-nita
Con-verti-tore F020
Con-verti-tore F021
Con-verti-tore F022
Modi-fica
durante la mar-
cia
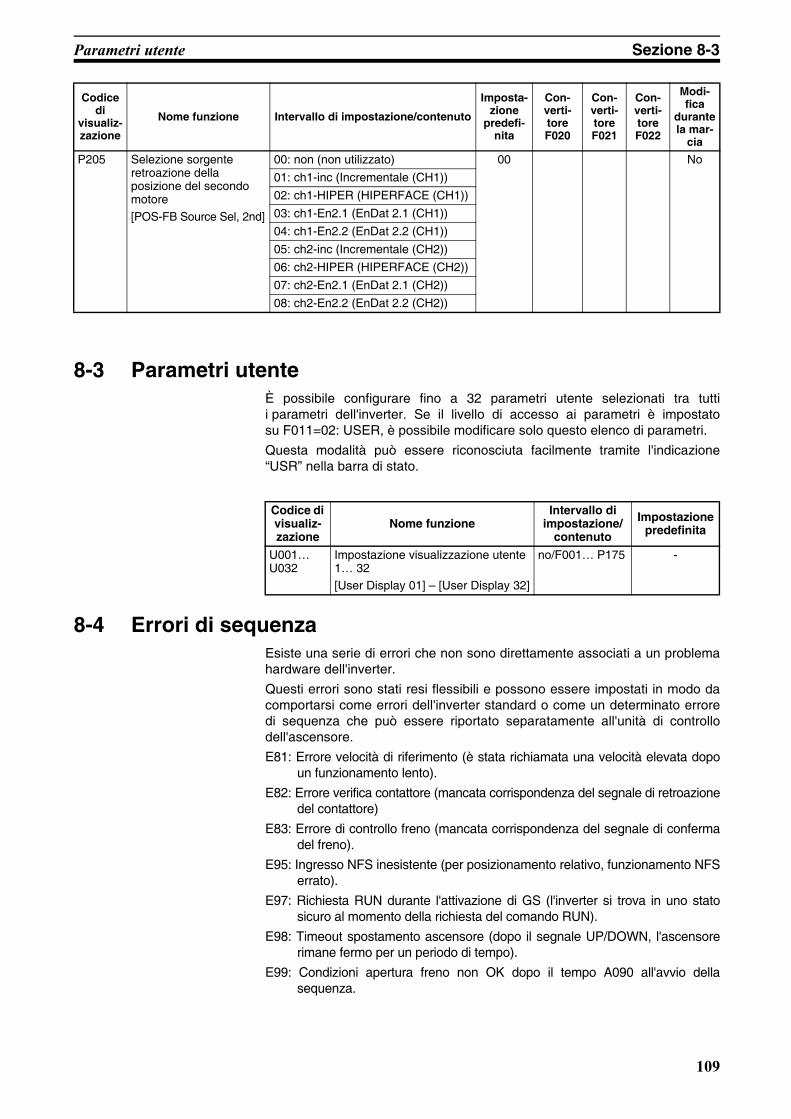
109
Parametri utente Sezione 8-3
8-3 Parametri utenteÈ possibile configurare fino a 32 parametri utente selezionati tra tuttii parametri dell'inverter. Se il livello di accesso ai parametri è impostatosu F011=02: USER, è possibile modificare solo questo elenco di parametri.Questa modalità può essere riconosciuta facilmente tramite l'indicazione“USR” nella barra di stato.
8-4 Errori di sequenzaEsiste una serie di errori che non sono direttamente associati a un problemahardware dell'inverter.Questi errori sono stati resi flessibili e possono essere impostati in modo dacomportarsi come errori dell'inverter standard o come un determinato erroredi sequenza che può essere riportato separatamente all'unità di controllodell'ascensore.E81: Errore velocità di riferimento (è stata richiamata una velocità elevata dopo
un funzionamento lento).E82: Errore verifica contattore (mancata corrispondenza del segnale di retroazione
del contattore)E83: Errore di controllo freno (mancata corrispondenza del segnale di conferma
del freno).E95: Ingresso NFS inesistente (per posizionamento relativo, funzionamento NFS
errato).E97: Richiesta RUN durante l'attivazione di GS (l'inverter si trova in uno stato
sicuro al momento della richiesta del comando RUN).E98: Timeout spostamento ascensore (dopo il segnale UP/DOWN, l'ascensore
rimane fermo per un periodo di tempo).E99: Condizioni apertura freno non OK dopo il tempo A090 all'avvio della
sequenza.
P205 Selezione sorgente retroazione della posizione del secondo motore[POS-FB Source Sel, 2nd]
00: non (non utilizzato) 00 No01: ch1-inc (Incrementale (CH1))02: ch1-HIPER (HIPERFACE (CH1))03: ch1-En2.1 (EnDat 2.1 (CH1))04: ch1-En2.2 (EnDat 2.2 (CH1))05: ch2-inc (Incrementale (CH2))06: ch2-HIPER (HIPERFACE (CH2))07: ch2-En2.1 (EnDat 2.1 (CH2))08: ch2-En2.2 (EnDat 2.2 (CH2))
Codice di
visualiz-zazione
Nome funzione Intervallo di impostazione/contenuto
Imposta-zione
predefi-nita
Con-verti-tore F020
Con-verti-tore F021
Con-verti-tore F022
Modi-fica
durante la mar-
cia
Codice di visualiz-zazione
Nome funzioneIntervallo di
impostazione/contenuto
Impostazione predefinita
U001… U032
Impostazione visualizzazione utente 1… 32[User Display 01] – [User Display 32]
no/F001… P175 -
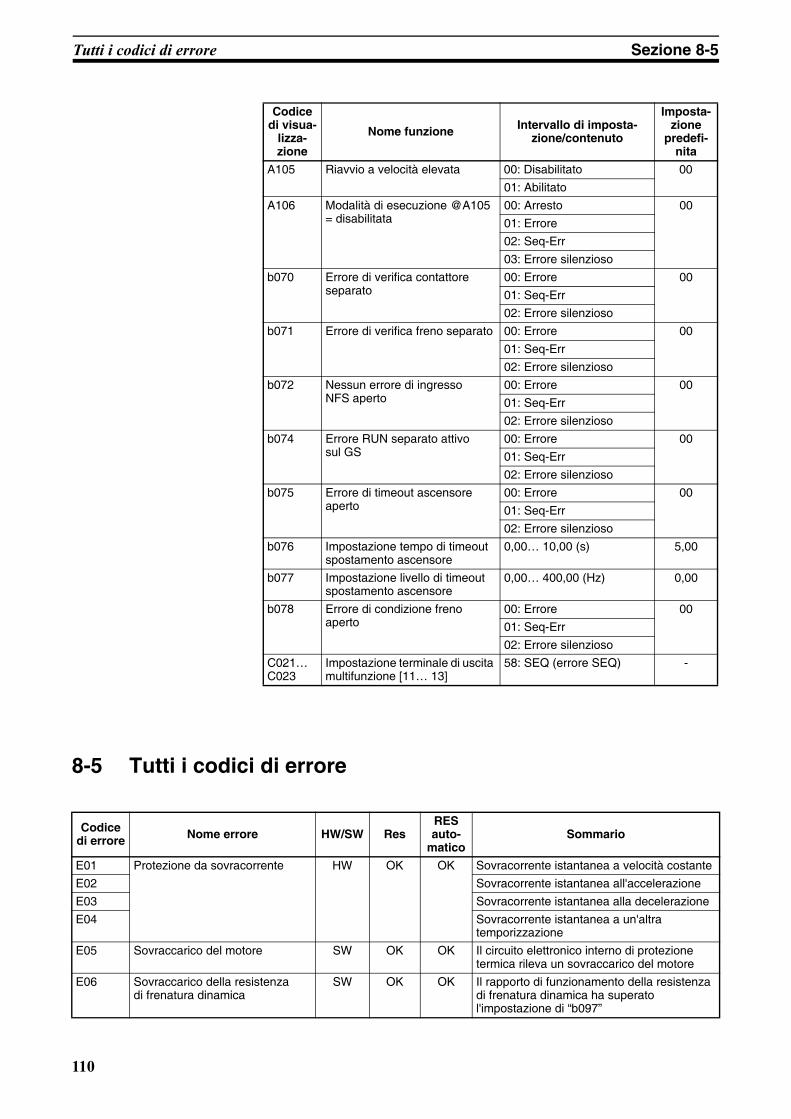
110
Tutti i codici di errore Sezione 8-5
8-5 Tutti i codici di errore
Codice di visua-
lizza-zione
Nome funzione Intervallo di imposta-zione/contenuto
Imposta-zione
predefi-nita
A105 Riavvio a velocità elevata 00: Disabilitato 0001: Abilitato
A106 Modalità di esecuzione @A105 = disabilitata
00: Arresto 0001: Errore02: Seq-Err03: Errore silenzioso
b070 Errore di verifica contattore separato
00: Errore 0001: Seq-Err02: Errore silenzioso
b071 Errore di verifica freno separato 00: Errore 0001: Seq-Err02: Errore silenzioso
b072 Nessun errore di ingresso NFS aperto
00: Errore 0001: Seq-Err02: Errore silenzioso
b074 Errore RUN separato attivo sul GS
00: Errore 0001: Seq-Err02: Errore silenzioso
b075 Errore di timeout ascensore aperto
00: Errore 0001: Seq-Err02: Errore silenzioso
b076 Impostazione tempo di timeout spostamento ascensore
0,00… 10,00 (s) 5,00
b077 Impostazione livello di timeout spostamento ascensore
0,00… 400,00 (Hz) 0,00
b078 Errore di condizione freno aperto
00: Errore 0001: Seq-Err02: Errore silenzioso
C021… C023
Impostazione terminale di uscita multifunzione [11… 13]
58: SEQ (errore SEQ) -
Codice di errore Nome errore HW/SW Res
RES auto-
maticoSommario
E01 Protezione da sovracorrente HW OK OK Sovracorrente istantanea a velocità costanteE02 Sovracorrente istantanea all'accelerazioneE03 Sovracorrente istantanea alla decelerazioneE04 Sovracorrente istantanea a un'altra
temporizzazioneE05 Sovraccarico del motore SW OK OK Il circuito elettronico interno di protezione
termica rileva un sovraccarico del motoreE06 Sovraccarico della resistenza
di frenatura dinamicaSW OK OK Il rapporto di funzionamento della resistenza
di frenatura dinamica ha superato l'impostazione di “b097”

111
Tutti i codici di errore Sezione 8-5
E07 Sovratensione bus in c.c. HW OK OK La tensione bus in c.c. registra un incremento eccessivo
E08 Errore nella memoria EEPROM SW Perdita di dati salvati o dati erratiE09 Sottotensione SW OK OK Calo di tensione nell'alimentazione
di controllo o bus c.c.E10 Errore sensore di corrente SW Il CT nell'inverter è in condizione anomalaE11 Errore CPU SW La CPU ha funzionato in modo errato oppure
è in condizione anomalaE12 Errore esterno SW OK Il dispositivo esterno è in condizione
anomala, l'inverter intercetta quel segnaleE14 Errore di terra HW Quando viene attivata l'alimentazione,
questa funzione rileva un errore di messa a terra tra l'uscita dell'inverter e il motore
E15 Sovratensione di ingresso HW OK OK La sovratensione di ingresso viene mantenuta oltre i 380/760 Vc.c. per 100 s
E16 Errore di alimentazione istantanea
SW OK OK L'errore di alimentazione istantanea dura minimo 15 ms
E20 Surriscaldamento all'arresto della ventola
HW OK OK Viene rilevata una riduzione della velocità della ventola di raffreddamento all'errore di temperatura
E21 Surriscaldamento HW OK OK La temperatura del modulo di alimentazione aumenta
E23 Errore di comunicazione GA SW OK OK Errore nelle comunicazioni della matrice gateE24 Perdita fase di ingresso SW OK OK Una delle fasi principali non è collegata
all'alimentazione dell'inverterE25 Errore circuito principale HW La matrice gate non è in grado di confermare
lo stato di attivazione/disattivazione del modulo di alimentazione
E30 Errore IGBT HW OK OK Azionato dal rilevatore incorporato nel modulo di alimentazione
E31 Sovracorrente IGBT SW OK OK IGBT e FWD sono protetti da correnti di picco elevate a seconda dell'impostazione della frequenza portante. Ridurre la portata per evitare l'errore.
E35 Surriscaldamento motore HW OK OK L'inverter monitora la resistenza del termistore collegato al terminale TH dell'inverter
E38 Sovraccarico a bassa velocità SW OK OK Si verifica un sovraccarico durante il funzionamento del motore a velocità molto bassa a 0,2 Hz o meno
E39 Sovraccarico unità di controllo SW OK OK Il circuito elettronico interno di protezione termica rileva un sovraccarico dell'unità di controllo
E41 Timeout comunicazioni Modbus SW OK OK Si verifica un timeout dovuto alla disconnessione della linea durante le comunicazioni in modalità Modbus-RTU
E43 Istruzione programmazione drive non valida
SW OK - Il terminale PRG è stato attivato senza il download di un programma sull'inverter
- Il programma memorizzato nella memoria dell'inverter è stato distrutto
E44 Errore di calcolo nidificazione programmazione drive
SW OK - Le subroutine sono nidificate in più di 8 livelli- Le istruzioni per l'anello successivo sono
nidificate in più di 8 livelli- Se le istruzioni sono nidificate in più di 8 livelli
Codice di errore Nome errore HW/SW Res
RES auto-
maticoSommario

112
Tutti i codici di errore Sezione 8-5
E45 Errore istruzione programmazione drive
SW OK - La destinazione di salto di un'istruzione GOTO è un'istruzione successiva per terminare un anello o altri anelli
- La variabile “U(ii)” a cui si fa riferimento tramite un'altra variabile non è stata trovata
- Un'istruzione aritmetica ha causato:1) Overflow2) Underflow3) Divisione per zero- Un'istruzione “chgparam” ha causato:1) Riferimento a un parametro inesistente2) Scrittura di un valore al di fuori
dell'intervallo di impostazione3) La modifica di un valore del parametro che
non può essere aggiornato durante il funzionamento dell'inverter.
4) La modifica di un valore del parametro il cui aggiornamento è limitato da un blocco del software
E50 Blocco utente programmazione drive 0
SW OK Comando “Blocco 0” utente tramite programmazione drive
E51 Blocco utente programmazione drive 1
SW OK Comando “Blocco 1” utente tramite programmazione drive
E52 Blocco utente programmazione drive 2
SW OK Comando “Blocco 2” utente tramite programmazione drive
E53 Blocco utente programmazione drive 3
SW OK Comando “Blocco 3” utente tramite programmazione drive
E54 Blocco utente programmazione drive 4
SW OK Comando “Blocco 4” utente tramite programmazione drive
E55 Blocco utente programmazione drive 5
SW OK Comando “Blocco 5” utente tramite programmazione drive
E56 Blocco utente programmazione drive 6
SW OK Comando “Blocco 6” utente tramite programmazione drive
E57 Blocco utente programmazione drive 7
SW OK Comando “Blocco 7” utente tramite programmazione drive
E58 Blocco utente programmazione drive 8
SW OK Comando “Blocco 8” utente tramite programmazione drive
E59 Blocco utente programmazione drive 9
SW OK Comando “Blocco 9” utente tramite programmazione drive
E60… E69
Errore opzione 1 0… 9 HW/SW OK
E70… E79
Errore opzione 2 0… 9 HW/SW OK
E81*2 Errore velocità di riferimento SW OK OK Riavvio a velocità elevata (con A105 = 00)
E82*1 Errore di verifica contattore SW OK OK Rilevata assenza di risposta del contattore in uscita per impostazione tempo A092
E83*1 Errore di verifica freno SW OK OK Rilevata assenza di risposta del freno in uscita per impostazione tempo A095
E84 Rilevamento rotazione errata SW OK OK La direzione del comando RUN è opposta rispetto alla velocità di rilevamento
E85 Disconnessione encoder (CH1)(Timeout di comunicazione)
SW OK Si verifica un timeout dovuto alla disconnessione della linea durante le comunicazioni tra l'encoder e l'inverter
E86 Disconnessione encoder (CH2)(Timeout di comunicazione)
SW OK Si verifica un timeout dovuto alla disconnessione della linea durante le comunicazioni tra l'encoder e l'inverter
Codice di errore Nome errore HW/SW Res
RES auto-
maticoSommario
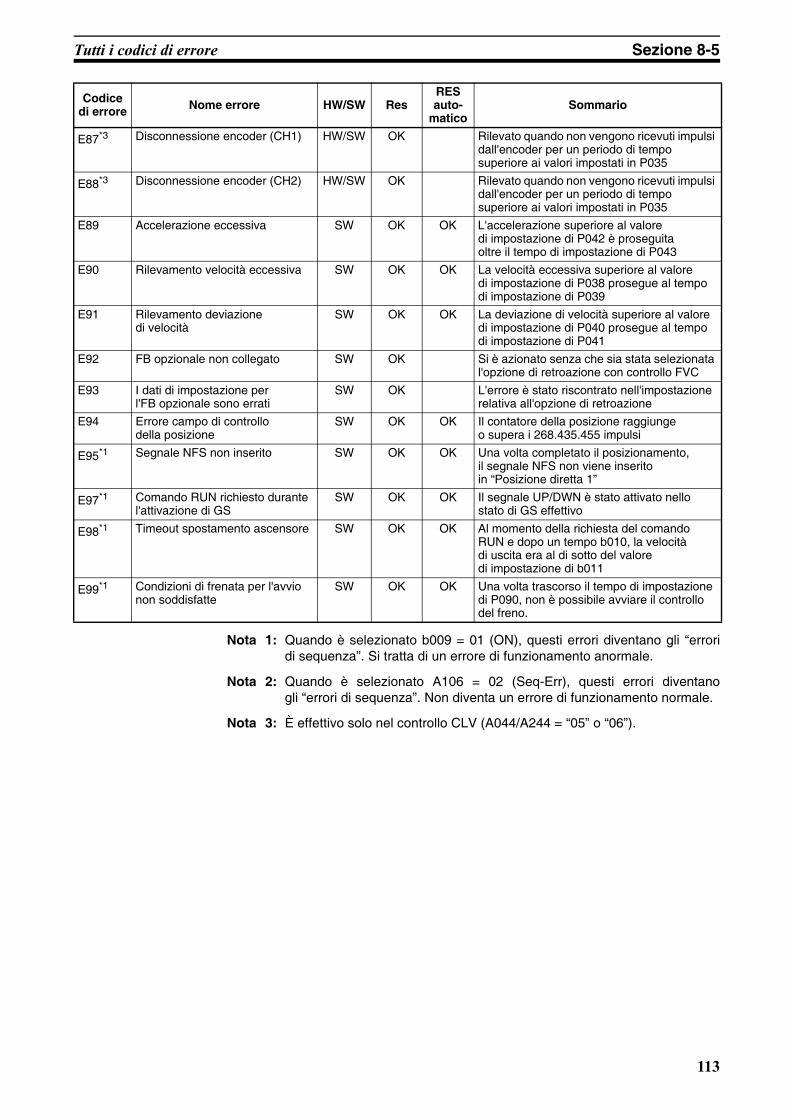
113
Tutti i codici di errore Sezione 8-5
Nota 1: Quando è selezionato b009 = 01 (ON), questi errori diventano gli “erroridi sequenza”. Si tratta di un errore di funzionamento anormale.
Nota 2: Quando è selezionato A106 = 02 (Seq-Err), questi errori diventanogli “errori di sequenza”. Non diventa un errore di funzionamento normale.
Nota 3: È effettivo solo nel controllo CLV (A044/A244 = “05” o “06”).
E87*3 Disconnessione encoder (CH1) HW/SW OK Rilevato quando non vengono ricevuti impulsi dall'encoder per un periodo di tempo superiore ai valori impostati in P035
E88*3 Disconnessione encoder (CH2) HW/SW OK Rilevato quando non vengono ricevuti impulsi dall'encoder per un periodo di tempo superiore ai valori impostati in P035
E89 Accelerazione eccessiva SW OK OK L'accelerazione superiore al valore di impostazione di P042 è proseguita oltre il tempo di impostazione di P043
E90 Rilevamento velocità eccessiva SW OK OK La velocità eccessiva superiore al valore di impostazione di P038 prosegue al tempo di impostazione di P039
E91 Rilevamento deviazione di velocità
SW OK OK La deviazione di velocità superiore al valore di impostazione di P040 prosegue al tempo di impostazione di P041
E92 FB opzionale non collegato SW OK Si è azionato senza che sia stata selezionata l'opzione di retroazione con controllo FVC
E93 I dati di impostazione per l'FB opzionale sono errati
SW OK L'errore è stato riscontrato nell'impostazione relativa all'opzione di retroazione
E94 Errore campo di controllo della posizione
SW OK OK Il contatore della posizione raggiunge o supera i 268.435.455 impulsi
E95*1 Segnale NFS non inserito SW OK OK Una volta completato il posizionamento, il segnale NFS non viene inserito in “Posizione diretta 1”
E97*1 Comando RUN richiesto durante l'attivazione di GS
SW OK OK Il segnale UP/DWN è stato attivato nello stato di GS effettivo
E98*1 Timeout spostamento ascensore SW OK OK Al momento della richiesta del comando RUN e dopo un tempo b010, la velocità di uscita era al di sotto del valore di impostazione di b011
E99*1 Condizioni di frenata per l'avvio non soddisfatte
SW OK OK Una volta trascorso il tempo di impostazione di P090, non è possibile avviare il controllo del freno.
Codice di errore Nome errore HW/SW Res
RES auto-
maticoSommario
Nota: specifiche soggette a modifica senza preavviso.Cat. No. I131E-IT-01A
Austria Tel: +43 (0) 2236 377 800 www.industrial.omron.at
Belgio Tel: +32 (0) 2 466 24 80 www.industrial.omron.be
Repubblica Ceca Tel: +420 234 602 602 www.industrial.omron.cz
Danimarca Tel: +45 43 44 00 11 www.industrial.omron.dk
Finlandia Tel: +358 (0) 207 464 200 www.industrial.omron.fi
Francia Tel: +33 (0) 1 56 63 70 00 www.industrial.omron.fr
Germania Tel: +49 (0) 2173 680 00 www.industrial.omron.de
Ungheria Tel: +36 (0) 1 399 30 50 www.industrial.omron.hu
Italia Tel: +39 02 32 681 www.industrial.omron.it
Africa e Medio OrienteTel: +31 (0) 23 568 11 00 www.industrial.omron.eu
Olanda Tel: +31 (0) 23 568 11 00 www.industrial.omron.nl
Norvegia Tel: +47 (0) 22 65 75 00 www.industrial.omron.no
Polonia Tel: +48 (0) 22 645 78 60 www.industrial.omron.com.pl
Portogallo Tel: +351 21 942 94 00 www.industrial.omron.pt
Russia Tel: +7 495 648 94 50 www.industrial.omron.ru
Spagna Tel: +34 913 777 900 www.industrial.omron.es
Svezia Tel: +46 (0) 8 632 35 00 www.industrial.omron.se
Svizzera Tel: +41 41 748 13 13www.industrial.omron.ch
Turchia Tel: +90 (0) 216 474 00 40 www.industrial.omron.com.tr
Regno Unito Tel: +44 (0) 870 752 08 61 www.industrial.omron.co.uk
OMRON EUROPE B.V. Wegalaan 67-69, NL-2132 JD, Hoofddorp, Paesi Bassi. Tel: +31 (0) 23 568 13 00 Fax: +31 (0) 23 568 13 88 www.industrial.omron.eu
Inverter per ascensori LX per tutti I tipi di motori
GUIDA RAPIDA DI UTILIZZOCat. No. I131E-IT-01A
LX Inverter per ascensori per tutti i tipi di motoriModello: 3G3LXClasse 200 V Ingresso trifase 4,0... 37 kWClasse 400 V Ingresso trifase 3,7... 37 kW
GUIDA RAPIDA DI UTILIZZO
Cat. No. I131E-IT-01A




























