-
8/13/2019 Lund 9808
1/5
Institutionen för Reglerteknik
Lunds Tekniska Högskola
Olinjär reglering FRT 075
Exam 1998-08-22
Grading
Solutions should be clearly motivated. The exam consists of 25
points.
Grade 3: 12 points
Grade 4: 17 points
Grade 5: 22 points
Allowed material
Solved examples such as exams and exercises are not allowed.
Otherwise, all
material is allowed. The results will be posted outside the labs
on the ground
floor, M-building.
50 60 70 80 90 100−20
0
20
−20 −10 0 10 200
20
40
60
x1
x 1
x 3
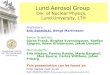
The chaotic Lorentz system
1
-
8/13/2019 Lund 9808
2/5
1. The Lorentz equations (illustrated on the front
page of the exam)
d
dt x1 σ ( x2 − x1)
d
dt
x2 rx1 − x2 − x1 x3
d
dt x3 x1 x2 − bx3, σ , r, b
> 0,
where σ , r, b are constants, are often used as
example of chaotic motion.
a. Determine all equilibrium points. (1 p)
b. Linearize the equations around x 0
and determine for what σ , r, b thisequilibrium
is locally asymptotically stable. (2 p)
2. A servo motor is controlled with a relay with
hysteresis, see figure. Predict
amplitude and frequency for possible limit oscillations in the
system. Also
predict if the oscillations are stable or not.
1s(s+1)
−1
θ ref θ u+
The describing function for the relay in question satisfies
−1/ N ( A) −π A
4
1 − 1/(2 A)2 − i
π
8.
(2 p)
3. A stable linear system G(s) and a
nonlinear function f ( x) x +
arctan xare connected under negative feedback. What conditions
must be put on the
linear part G(s) for stability to be guaranteed via
the circle criterion?(2 p)
4. By varying the center of gravity you can get a
swing (“gunga”) to rest. Letthe equations for the swing
be given by
J d2Φ
dt2 + mgl(t) sin Φ 0,
where m is the mass, J the moment of
inertia. Show that the swing returns
to rest if the length l(t) varies as
l(t) l0 + ε dΦ
dt sin Φ, ε > 0, l(t) >
0.
(Hint: J Φ̇2
/2 + mgl0(1 − cos Φ).) (2 p)
2
-
8/13/2019 Lund 9808
3/5
5.
a. Consider the system
˙ x1 x1 + x32
˙ x2
x1 −
x2.
Can the function
V ( x1 , x2) − x21/2 + x
42/4
be used as a Lyapunov function to show stability of this system?
Motivate.
(1 p)
b. What is the system gain G of
G(s) 2
(s + 1)(s + 2)
?
(1 p)
c. Can a linear system with relative degree 2 be passive
(the relative degreeis the number of poles – number of
zeros)? Motivate. (1 p)
d. Can this be the state trajectory of a second order
system of the form ˙ x f ( x, t)?
Motivate. (1 p)
6. Consider the system
˙ x1 x2
˙ x2 − x31 + u
A sliding mode controller u −2sgn(σ ( x))
with σ ( x) x1 + x2 is
used.
a. Determine the closed loop dynamics and the equivalent
control signal u eqon the part of the surface
σ ( x) 0 where there is sliding. (2 p)
b. On what parts of the surface σ ( x) 0
is there sliding motion? (1 p)
7. Consider the static nonlinearity
f ( x) x x
a. Calculate the describing function. (2 p)
b. Is f ( x) passive? (1
p)
3
-
8/13/2019 Lund 9808
4/5
8. A simple model for the velocity and position of a cart
is given by
˙ x1 x2
˙ x2 u.
The control signal is limited so that u ≤ 1
(both acceleration and decele-ration is possible). The
problem is to take the cart from any given initialposition and
velocity to x1 x2 0 so that the
criterion
t f 0
(1 + 2u)dt
is minimized, where t f (free) is
the time when x(t f ) 0.
Suppose the problem is “normal” (n0 1).
a. Show that an extremal is of the form
u(t)
−1, 0 ≤ t < t1
0, t1 ≤ t < t2
1, t2 ≤ t ≤ t f
or
u(t)
1, 0 ≤ t < t1
0, t1 ≤ t < t2
−1, t2 ≤ t ≤ t f
for some t1, t2 with 0 ≤ t1 < t2 ≤
t f . (3 p)
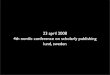
b. If the controller is implemented as a state feedback
controller the state
space becomes partitioned as in the figure. Inside each domain
one of the
control signals −1, 0 or 1 should be used. Determine which
control signalshould be used inside each of the four domains
(only answer wanted).
(1 p)
−3 −2 −1 0 1 2 3−3
−2
−1
0
1
2
3
Domain 1Domain 2
Domain 3
Domain 4
x1
x 2
4
-
8/13/2019 Lund 9808
5/5
9. Show that the van der Pool equation
¨ y − (1 − y2) ˙ y + y 0
does not have a limit cycle with y(t) < 1 for all
t. (Hint: V y2 +
˙ y2)
(2 p)
5