Embed Size (px)
Citation preview

/XFHQW�7HFKQRORJLHVBell Labs Innovations
EG16: Field Measurements: Drive TestingLM: 4
Engineering Guideline
401 - 380 - 346Version 0.9February 1998
Lucent Technologies — ProprietaryThis document contains proprietary information of Lucent Technologies and is not to be
disclosed or used except in accordance with applicable agreements.Copyright © 1998 by Lucent Technologies
Unpublished and Not for PublicationAll Rights Reserved

Engineering Guideline EG 16: Drive Testing
Lucent Technologies PROPRIETARYSee notice on first page
2 Version: 0.9 LM: 4

Engineering Guideline EG 16: Drive Testing
Lucent Technologies PROPRIETARYSee notice on first page
Version: 0.9 LM: 4 3
This material is protected by the copyright and trade secret laws of the United States andother countries. It may not be reproduced, distributed or altered in any fashion by anyentity, including other Lucent Technologies Business Units or Divisions, without theexpressed written consent of the Customer Technical Support and Informationorganisation.
Notice
Every effort was made to ensure that the information in this document was complete andaccurate at the time of printing. However, information is subject to change.

Engineering Guideline EG 16: Drive Testing
Lucent Technologies PROPRIETARYSee notice on first page
4 Version: 0.9 LM: 4

Engineering Guideline EG 16: Drive Testing
Lucent Technologies PROPRIETARYSee notice on first page
Version: 0.9 LM: 4 5
Table of Contents
1.1 About this Guideline 7
1.2 The Purpose of Drive Testing 71.2.1 When to Drive Test 71.2.2 Where to Drive Test 8
1.3 Planning 81.3.1 Route Plans 81.3.2 Radio Test Plan 81.3.3 Network Test Plan 111.3.4 Trouble Ticket 111.3.5 Data Collection 131.3.6 Layer 1 Messages 131.3.7 Layer 3 Messages 131.3.8 Set-up Criteria 131.3.9 Sampling Times 131.3.10 Scanning Receiver 141.3.11 Call Classification 14
1.4 Field Analysis 15
1.5 Troubleshooting 151.5.1 No Data Collected 151.5.2 No Positional Information Collected 151.5.3 Coverage Holes 161.5.4 Dropped Calls 161.5.5 Handover Problems 161.5.6 Blocked Calls / System Busy 17
1.6 Drive Test Equipment 17
1.7 Staffing 17

Engineering Guideline EG 16: Drive Testing
Lucent Technologies PROPRIETARYSee notice on first page
6 Version: 0.9 LM: 4

Engineering Guideline EG 16: Drive Testing
Lucent Technologies PROPRIETARYSee notice on first page
Version: 0.9 LM: 4 7
1.1 About this GuidelineThis guideline explains when, where , why and how drive testing should be used to collectreal-time RF information from the field. Generally this is done using a vehicle, but it canalso be carried out on foot where circumstances dictate.
1.2 The Purpose of Drive TestingDrive testing is principally applied in both the planning and optimisation stage of networkdevelopment. However, there are other purposes for which drive testing can be used:
• To provide path loss data for initial site survey work
• To verify the propagation prediction during the initial planning of the network.
• To verify the network system parameters, as defined in the EG8: GSM/DCSSystem-Specific Parameters.
• To provide the initial test parameters used in Benchmarking (as defined in the“Analysis” section of the Network Performance and Monitoring Guideline).
• To verify the performance of the network after changes have been made e.g.when a new TRX is added; the removal or addition of a new site; any poweradjustments or changes to the antenna; any changes in clutter or traffic habitssuch as the addition of new roads etc.
• To measure any interference problems such as coverage from neighbouringcountries.
• To locate any RF issues relating to traffic problems such as dropped or blockedcalls.
• To locate any poor coverage areas.
• To monitor the network against a slow degradation over time, as well asmonitoring the network after sudden environmental conditions, such as galesor electrical storms.
• To monitor the performance of a competitor’s network.
1.2.1 When to Drive TestDrive testing can take place during the day or at night and is dependant upon theOperator’s requirements and subscriber habits.
Drive testing during the day will mimic the conditions as seen by subscribers, but mayclog up the network if call analysis is being performed.
Drive testing during the night will allow a greater area to be surveyed due to the reductionin vehicular congestion. It will also allow for certain test signals to be transmitted andtested, particularly when setting up a new site, without interrupting normal operation.However, night-time testing does not mimic the conditions experienced by subscribers.
For planning purposes, drive testing is typically performed at night and for maintenancepurposes, drive testing is performed during the day.

Engineering Guideline EG 16: Drive Testing
Lucent Technologies PROPRIETARYSee notice on first page
8 Version: 0.9 LM: 4
1.2.2 Where to Drive TestSome areas of a network will have greater performance problems than others. Drivetesting should not be uniform throughout the whole network, but should be weightedtowards areas where there are significant RF problems.
There may be other areas of the network that require temporary coverage during a certaintime of the year e.g. an exhibition centre or a sports stadium. These areas should beexamined and planned in greater detail.
1.3 PlanningIt is important that a drive test is documented. This is specified by the Operator and caneither take the form of creating a new item of documentation or filling in an existingdocument. All documentation will be passed to Analysts and Engineers, who will needaccurate records of any test work carried out.
1.3.1 Route PlansThe area to be drive tested is ascertained before leaving the office. There are three levelsof drive testing depending on the purpose of the test:
Primary Route: This includes all major roads, highways and throughfares and should begiven priority to all other roads when conducting a coverage test, unless a new site is putinto service for a specific objective.
Secondary Route: This includes all streets, by-streets and compounds, where accessible,such as a University Campus. Secondary routes are used in areas where problems havebeen located during a primary route test and further investigation is needed.
Miscellaneous Routes: This includes in-building and non-access routes to vehicles suchas shopping malls, golf courses, airports, hotels, conference centres etc.
A route is prepared by photocopying a map and highlighting the route to be driven. Forprimary routes, a map of scale no less than 1:20,000 should be used, and a map of scale1:10,000 is recommended for secondary routes. It is recommended that the route ismarked in a contiguous circuit, taking account of one-way streets at this stage.
A drive test should be planned in both directions, where possible, and at the same speed.This minimises any errors and checks the point of handovers and cell dimensioning. Fornew sites that are being tested, it is recommended that the transceiver is forced to camponto the cell (forbidding any handovers) in order to ascertain the full coverage of the cell.The test should be re-driven with any forced handovers removed.
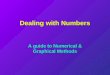
1.3.2 Radio Test PlanA Radio Test Plan is used during new surveys where CW measurements are being taken.It is a document detailing the transmission methods and receiving details used during thesurvey. An example of a Radio Test Plan is shown in Figure 1:

Engineering Guideline EG 16: Drive Testing
Lucent Technologies PROPRIETARYSee notice on first page
Version: 0.9 LM: 4 9
RADIO TEST PLAN
Test Details:Date: Monday 28th July 1997 Time at start of test: 10:30
Test Name: 280797a Time at end of test: 18:30
Site Name: Cosmos Building Technician: S Allen-Stevens
Transmission Details:Antenna Height: 2 m Antenna Gain: 6 dB
Antenna Type: Omni Antenna Polarisation: Vertical
Transmitter ERP atstart of test:
500 W Transmitter ERP atend of test:
497 W
Frequency at start oftest:
915 MHz Frequency at end oftest:
915 MHz
Cable Loss: 3 dB Downtilt angle: 0°
Building Height: 30 m Comments: Lip around building of 1 m
Receiver Details:Antenna Gain: 0 dB Antenna Polarisation: Vertical
Antenna Mounting: Mag. Mount Antenna Type: ¼ Wave dipole
Cable Loss: 3 dB Vehicular Height: 2 m
Comments:Antenna mounted on roof in centre of vehicle.
Route Details:Mainly city centre incorporating High Street, Kings Street, Regent Street... as shown on Map 2807.1Very congested with vehicular traffic from 12:00 to 13:45
Additional Comments:LOS with transmitter from Marker1 to Marker2.Transmitter powered down from 16:35 to 16:55 due to electrical storm.
Figure 1:Example of Radio Test Plan

Engineering Guideline EG 16: Drive Testing
Lucent Technologies PROPRIETARYSee notice on first page
10 Version: 0.9 LM: 4
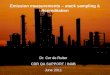
NETWORK TEST PLANTest Details:Date: Monday 28th July 1997 Time at start of test: 09:30
Test Name(s): 280797a/b/c/d/e/f Time at end of test: 16:00
Technician: S Allen-Stevens
Reasons for Test:ComplaintReference:
Site under Survey:
Complaint details: Details of Site:ERP:Downtilt Angle:
RoutineMaintenance Y/N:
N Height:
Other: Possible interference withneighbour network
Allocated Channels:
Comments:
Set-Up Details:Sample Method: Lee Scanning Data to be collected:Maximum Speed: 40 km/h Channels: 124 Contiguous
Scanning AntennaGain:
0 dB Avg/Max/Min: Average
Scanning Cable Loss: 3 dB Min. Signal Strengthlevel:
10
Transceiver AntennaGain:
0 dB Tracking Data to be collected:
Transceiver CableLoss:
3 dB Buffer size:(in relation to handovers)
5
Comments: Antennae are mag. Mount in centre of roof. Phones calibrated 15/03/97.
Route Details:As shown on Map 2807-3. Regent Street closed for re-surfacing therefore not surveyed.
Figure 2: Example of Network Test Plan

Engineering Guideline EG 16: Drive Testing
Lucent Technologies PROPRIETARYSee notice on first page
Version: 0.9 LM: 4 11
1.3.3 Network Test PlanThe Network Test Plan is a document used to record the set-up of the surveyingequipment. It is used during analysis, in order to isolate specific problems or can be part ofthe problem solving process.
An example of a Network Test Plan is shown in Figure 2.
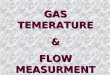
1.3.4 Trouble Ticket1. The Trouble Ticket is a document originating from the CRC (Customer Technical
Support), by which problems reported by customers are passed through Lucent atvarious levels. An example of a Trouble Ticket is shown in Figure 3.
2. The trouble tickets are currently logged on to a database CAROD which willeventually be replaced by another database. GTSIP. A database has also beenset u specifically for field service engineers to pass information fortroubleshooting in the field which is not connected to Trouble Tickets. Thisdatabase is called FELIX.
3. According to the problem area, location and origin of the call, different scenarios canbe followed in order to solve the problem.

Engineering Guideline EG 16: Drive Testing
Lucent Technologies PROPRIETARYSee notice on first page
12 Version: 0.9 LM: 4
4. TROUBLE TICKET
Problem Area:1: Problemo Unable to place call o Crosstalko Unable to receive call o Call droppedo Unable to hear audio o Echoo Unable to be heard o Busy Toneo Unable to call specific o Announcemento Glass breaking sound o Othero Noisy connection
Customer Details:2: Originator Number: 3: Calling Number: Tel. No:
o Local o National o International
4: Originator Name: 5: Originator Contact Number:
6: Location of ProblemCity Area Street
7: Was Originator? 8: Time Problem Occurredo Stationary o Drivingo In-Building At what Speed?
Customer Care Area9: Ticket No: 10: Date: 11: Time
12: Operator Name: 13: Contact Number:
14: Problem Description:
Cell Site Names:
15: Clearance Details:Date: Time:Trouble Found:
Action Taken:
Figure 3: Example of a Trouble Ticket.

Engineering Guideline EG 16: Drive Testing
Lucent Technologies PROPRIETARYSee notice on first page
Version: 0.9 LM: 4 13
1.3.5 Data CollectionWhile conducting a drive test, all data should be collected, saved and tagged with:
• A time stamp
• A positional stamp
If the data is not stamped, it is not possible to efficiently analyse or plot the data. Inaddition to the above stamps, other necessary criteria required for field measurements are:
• RxLEV of Serving Cell - Dedicated/Idle
• RxQUAL of Serving Cell - Dedicated/Idle
• Timing Advance of Serving Cell - Dedicated mode only.
• Cell ID of Serving Cell (NCC, MNC, LAC, BSIC, BCCH)
• Cell ID of Neighbour Cells (BA Table)
• RxLEV & RxQUAL of Neighbour Cells
1.3.6 Layer 1 MessagesOther Layer 1 criteria that is useful for field measurements include:
• C1 criteria
• ARFCN of Serving Cell - (TCH in dedicated mode, BCCH in idle mode))
• Time Slot (TS)
1.3.7 Layer 3 MessagesAll Layer 3 messages should be collected where possible. Layer 3 Messages are used byAnalysts to determine more accurately the cause of a problem within the network.
Some field test equipment can perform basic analysis of particular Layer 3 messagesduring data collection. This enables certain conditions such as call classification orhandovers to be flagged to the survey technician.
1.3.8 Set-up CriteriaBefore a drive test can take place, both the scanner and receiver will need to be set-upwith certain criteria. The criteria will depend on both the test to be performed and theequipment used, but will typically include statistical information , channels to be tested,scanning methods to use, together with criteria for determining call classification.
1.3.9 Sampling TimesDue to the losses and fading effects of an RF environment, it is meaningless to measureindividual spot readings of field strength. It is usual practice for a number of samples to betaken in a given time and then mean averaged.
In general, the sampling methods used are either the Nyquist sampling rate or the LeeCriteria Method .
In high-multipath areas with deep fades, such as that experienced in city centres, ameasured mean value is not enough in itself to inform the Radio Engineer of the dynamicsof the radio environment. In this case it is advisable to also collect the maximum,minimum and standard deviation of the readings.

Engineering Guideline EG 16: Drive Testing
Lucent Technologies PROPRIETARYSee notice on first page
14 Version: 0.9 LM: 4
1.3.10 Scanning ReceiverAs well as the sampling rate, the number of channels, scanning rate and synchronisationtimes are used to determine the maximum speed that the vehicle can travel in order tomake efficient field measurements.
Error! Reference source not found. can be used as a guide for maximum vehicle speedusing a scanner speed of 25 ch/s, collecting data every second..
Table 1: Guide to maximum vehicle speed.
Number of Channels GSM 900 (km/h) GSM 1800 (km/h)
20 60 3040 30 1560 20 1080 15 8100 12 6124 10- 5
Note: The ESVD or Rohde and Schwartz TS9951 has a scanning rate of 400 ch/s. Thisrate is high enough to rarely limit the speed of the vehicle.
1.3.11 Call ClassificationIn principle there are five call classifications, some of which can be sub-divided further.
Good Calls: These are calls that are successfully placed on the network and maintainedfor the required duration.
Dropped Calls: These are calls that are successfully placed on to the network but areterminated without authorisation. Using Layer 3 Messages, these calls can be sub-dividedinto:
• End User Hang-up
• System Hang-up
• Other
Blocked Calls: These are calls that cannot be placed on to the network. Again, usingLayer 3 messages, these can be sub-divided as follows:
• System Busy
• End User Engaged
• No Service
• Other
Roamed Calls: These are calls that are successfully placed on another network. Roamedcalls may also be good calls or dropped calls.
Noisy Calls: These are calls which have been successfully completed for the duration ofthe call but which experienced a number of noise bursts that a subscriber may findintolerable. The threshold for determining the level of poor audio is programmed duringthe set-up of the test.
In GSM, this particular classification is very difficult to determine with great accuracy. Itshould be noted that it is not enough to monitor just the RxLEV and the RxQUAL.

Engineering Guideline EG 16: Drive Testing
Lucent Technologies PROPRIETARYSee notice on first page
Version: 0.9 LM: 4 15
1.4 Field AnalysisAfter the drive test is completed, it is important that the data is checked to ensure thatenough has been collected in order to complete a thorough analysis back in the office,before returning.
In order to check the data, a certain amount of analysis will need to be performed. Often,the cause of the problem may be obvious to the surveying technician , and this should bereported to the office immediately.
The following are some of the most commonly encountered performance problemsencountered during drive testing.
• No data collected
• No positional information collected
• Coverage Holes
• Dropped Calls
• Handover Problems (Ping-Ponging)
• Blocked Calls / System Busy
Remedial action for these problems is shown in Section 1.5 below.
1.5 TroubleshootingThis section suggest some of the most likely causes of problems during a drive test.
1.5.1 No Data CollectedOccasionally, the equipment fails to trigger the collection device to save the data to file.
• Check all cables
• Ensure the Processing Unit is powered
• Re-start the laptop computer
• Re-start the equipment
• Re-drive the test.
1.5.2 No Positional Information CollectedIf data is collected using GPS only, it may be possible that satellite reception was lostduring a drive through a tunnel etc. It is important that back-up equipment is used, such asa Dead-Reckoning device, since a GPS receiver will re-transmit the last known positionuntil it receives an update. If the vehicle moves without GPS cover, the data will beinaccurate and cannot be analysed.
• Check the GPS antenna cable to the receiver
• Drive to an open area and ensure that the GPS system is working correctly
• If required, install a back-up positional device to safeguard against lost GPS

Engineering Guideline EG 16: Drive Testing
Lucent Technologies PROPRIETARYSee notice on first page
16 Version: 0.9 LM: 4
1.5.3 Coverage HolesIf there are patches of poor coverage in unexpected areas, it may indicate the fringes of acoverage hole. It is important to re-drive this particular area.
• Complete a route plan using secondary roads as far as possible
• Make notes of any buildings / obstructions that may cause shadowing
• Take note of pedestrian / vehicular habits in the area
1.5.4 Dropped CallsDropped calls can be caused by either RF environments or incorrect system parameters.The following data should be checked to ensure that it has been collected properly.
• Layer 3 Messages
• Neighbour Cell List (BA Table)
• RxLEV (Server & Neighbour)
• RxQUAL (Server & Neighbour)
Finally, ensure that the automatic setting for the call length is not shorter than that for thetimer monitoring for unauthorised call drop-outs. The setting should be a minimum of 30seconds.
1.5.5 Handover ProblemsHandover problems are generally caused by inaccurate settings of the handover boundary.This can cause ping-ponging, where the server will keep changing, and congestion at theswitch. Check the following.
• The transceiver antenna is fitted correctly
• Collection of Layer 3 Messages
• Collection of Neighbour Cell List (BA Table)
• Collection of Scanning Information
• Collection of Cell Identities
• Collection of T.Adv for the Serving Cell
Also, ensure that the collection of data from the new serving cell immediately after thehandover has occurred (particularly RxLEV and RxQUAL) is not timed to occur prior tothe-synchronisation of the transceiver itself.
If a particular serving cell can be isolated as a potential cause of handover problems,slowly drive around the cell in a radius of around 500m - 1km, checking when handoversoccur.

Engineering Guideline EG 16: Drive Testing
Lucent Technologies PROPRIETARYSee notice on first page
Version: 0.9 LM: 4 17
1.5.6 Blocked Calls / System BusyIf calls are repeatedly classified as blocked, it is recommended that the drive test istemporarily halted in order to try and locate the cause.
• Check that the number called is fully functional
• Check that there is adequate coverage from the expected serving BTS
• Check the equipment transceiver is functioning correctly by using an ordinarymobile to call the office
• If all appears functional, try to place calls through an alternative BTS. If thissucceeds, inform the office immediately and re-suspend the drive test.
1.6 Drive Test EquipmentThe equipment needed in to perform a drive test will typically be made up of thefollowing:
• Transceiver - to exercise the network and to collect RF Information from thenetwork
• Scanning Receiver to collect RF information
• Position Locating System to track the vehicle position
• Processing Unit to process the information collected
• Collection / Storage Unit - such as a laptop computer, to store the data
The equipment must be properly installed into a vehicle. It must also be powered for atleast 30 minutes before the start of any test in order to minimise drift through temperaturechanges.
Always ensure that the transceiver has been registered on the network before beginning adrive test and that a test number has been allocated for placing and analysing calls. It isalso important that an ordinary mobile is taken on drive tests in order to place and receivecalls to and from the office during tests.
More detailed information about drive test equipment is given in EG17: Field TestEquipment.
1.7 StaffingThere should always be at least two people in the drive test vehicle:-
• The driver responsible for driving the designated route
• The surveying technician, responsible for monitoring the measurements,making notes, watching the display and computer, and performing preliminaryanalysis in the field.
The number of staff in an optimisation / survey team will depend on the complexity of thenetwork. In general, the surveying technician will obtain instructions from a RadioAnalyst with regards to problem areas to be surveyed. The technician is responsible forplanning the drive routes associated with the problem, collecting and crudely analysingthe data to ensure that the Analyst has enough data to troubleshoot more accurately.

Engineering Guideline EG 16: Drive Testing
Lucent Technologies PROPRIETARYSee notice on first page
18 Version: 0.9 LM: 4