Embed Size (px)
Citation preview

Adv. Space Res. Vol. 17, No. 10, (10)201-(10)205, 1996 PP. Copyright 0 1995 COSPAR
Printed in Great Britain. All rights reserved 0273-l 177196 $9.50 + 0.00
0273-1177(95)00714-8
LOW-ALTITUDE SPACEBORNE GPS RECEIVER FOR MONITORING THE IONOSPHERE-MAGNETOSPHERE INTERFACE REGION
Y. T. Chiu, M. Schulz, D. R. Schropp, Jr and M. A. Rinaldi
Lockheed Palo Alto Research Laboratory, O/91-20, B/X5,3251 Hanover Street, Palo Alto, CA 94304, U.S.A.
ABSTRACT
The ionosphere-magnetosphere interface region (IMIR) is difficult to monitor in situ because processes occurring there have short dynamic time scales and long spatial scales. However, a system of spaceborne Global Positioning System (GPS) receivers with upward-looking antennas onboard LEO (low Earth orbit, altitude < 700 km) spacecraft is suitable for remote sensing of the region between LEO and GPS orbit (altitude = 3 RE). Phase and group delays between the two GPS signals transmitted through the IMIR am directly proportional to the total line-of-sight electron content, which is the remotely sensed parameter usually required for modeling. LEO spacecraft motion causes the line-of-sight to sweep through the IMIR so as to reveal information about the plasmadensity structure. GPS receivers on TOPEX, the NASA/ CNES ocean-monitoring satellite at altitude = 1430 km, have precisely this capability to monitor the IMIR. Moreover, the two-frequency VHF cross-ranging signals from GPS satellites can be used in the same manner as L-band signals to “image” the IMIR. We demonstrate this capability by applying our special deconvolution algorithm to some appropriate TOPEX/GPS data and thereby produce a dynamic display of density structure in the ionosphere-magnetosphere interface region.
BACKGROUND
Various means are available for remote sensing of the magnetosphere. Some methods are essentially passive, relying on natural magnetospheric emissions to reveal plasma densities. Others are active, in that they involve the transmission of signals to or through the medium of interest. Optical imaging operates on solar and amoral resonant emission lines from ions and neutrals other than hydrogen. Neutral-particle imaging of the inner magnetosphere relies on knowledge of charge-exchange rates for interpretation.
Intensities of neutral-particle and/or optical images depend on the pmduct of the number of scatterers available and the flux of source particles/photons. To interpret an observed intensity as a “total content” measurement, one must know the source strength. EUV imaging, for example, relies on the output of solar or auroral photons, both beii highly variable. Moreover, both neutral-particle and optical imaging techniques depend on time-dependent distributions of ions and atoms in the exosphere and magnetosphere, which are not monitored routinely. Quantitative and dynamical information can thus be extracted from inner magnetospheric images only if these are complemented by such essential supporting information.
With cost and mission-operations factors considered, the difficulty (not to say impossibiity) of obtaining such simultaneous dynamic information can vitiate the main advantages of magnetospheric remote sensing. Thus, it is essential to find some cost-effective and quantitative means, preferably applicable to several modes of imaging, for the simultaneous verification of inner magnetospheric imaging techniques. For example, if we seek to reconstruct the ion-density distribution from measurements of total ion content along large numbers of lines-of-sight, then radiowave techniques could provide independent image verification /l/. Indeed, radio waves can be used as the primary probe for total magnetospheric plasma content along a line of sight, just as in optical imaging. In particular, radio waves with frequencies > 100 MHz am required, because they have relatively straight my paths. Lower frequency radio waves suffer severe refraction, and their consequently unknown ray paths reduces their capability for image verification.
(10)201

(10)202 Y. T. Chiu er al.
The principle of this powerful radio technique is that the plasma delay of a radio-frequency signal is inversely proportional to the square of the signal frequency (a consequence of electromagnetic wave mfraction in plasma in the high frequency limit) and directly proportional to the total (line-of-sight) electron content (TEC, electtons/cm2). Thus, in principle, the TEC along a radio line-of-sight can be deduced from the measured phase delay of the signal. In practice, a certain ambiguity has to be overcome, since the phase delay can be >> 2~ for practical radio frequencies. Almost any integer multiple of 27c can be added to the observed phase. This ambiguity can be overcome with measurements of group delay at a nearby frequency, with appropriate account taken of any instrumentally induced delays. This is precisely the technique by which the Global Positioning System (GPS) uses its L-band dual-frequency signals to determine ionospheric &lay to eliminate ambiguity as a major source of positioning ermr. Moreover, the dual-frequency phase difference (when retrieved) is of scientific value since it is a measure of the line-of- sight ionospheric TEC. ‘Ihe precise relationship is
TEc _ 8x2e(yn,c
e2
[ --- 1 1 1 -1
fL22 fL: (TL2 - TLI) = 4m0mec
e2 [ I 1 1 -1
fL2 fL1 ML2 --ML11 (1)
whem zI,, is the time delay of the signal with frequency fw = ouv/27r (N = 1, 2) and A$W = QAT~ is the corresponding phase delay. Since this technique depends on active precision signals, it is in principle absolute and not dependent on variables such as photon sources. It has been used to monitor ionospheric TECs accurately for almost a decade.
The commonly known L-band positioning signals of the GPS system are generally useful for magneto- spheric image verification, but “imaging” capabilities are considerably reduced if observations are ma& from platforms outside the GPS orbit (at R = 4 RE geocentric distance). This is because the L-band signals are aimed downward toward Earth, which means that the derived TECs would be dominated by the ionspheric contribution. For platforms above most of the ionosphere (e.g., at R 2 2 RE, Earth radii), L- band signals are good monitors of the plasmasphere. In some circumstances there may even be enough lines-of-sight betsveen the observation platform and the 21 GPS satellites to form “images” of the inner magnetosphere (R = 2-4 RE) without relying on solar or auroral photon output or vulnerability to cross- section uncertainties. This L-band technique would be especially suitable for imaging and verification in combination with neutral-particle imaging platforms on such orbits.
From platforms at R > 4 RE, a vantage point which affords much better coverage of the magneto- sphere, a little-known set of dual- frequency signals in VHF on GPS Block 2R spacecraft can be used for image verification These sig- nals from the GPS cross-ranging system wem designed to improve positioning of the GPS spacecraft by ranging each other. Similar in purpose to the L-band signals, the cross-ranging signals are designed to elimiMe error introduced by the inner magnetospheric TEC delay. If we retrieve the phase &lay between the observation platform and any mceived cross-ranging signal, the TEC thus derived will be useful for independent verifica- tion of EUV or ENA images taken along the TEC lines-of-sight. Figure 1 shows the essentials of this radiowave verification concept.
Fig. 1. Concept for ionosphere-plasma tomography with GPS receivers on observers/imagers (0) in highly elliptical orbits. Both navigational (L-band) and cm&ink (VHF) signals from GPS satellites (0) am available.

Spaceborne GPS Receiver (IO)203
Since GPS satellites transmit at two frequencies for cross-ranging purposes (cf. Figure 1) it should be possible to i&r the TEC from observed phase differences between the two signals whenever an observing satellite (not necessarily in the GPS constellation) is in a GPS beam. However, each VHF beam (directed 30’ downward from the transmitter’s horizon) has only a 21” half-angle relative to the horizontal plane, and so “ill~inates” only about 1.24a steradians out of a possible 47t, and (as the GPS constellation orbits the Earth at a geocentric distance _ 4 RE) no crosslink signal can pass within R - 2.5 RE of the geocenter.
RADIOWAVE IMAGING, TOMOGRAPHY, AND CALIBRATION
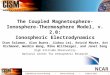
With adequate spatial/temporal resolution, it should he possible to reconstruct a plasmaspheric electron- density model tomographically (at least for R 5 4 RE) from a body of TEC data comprising both L-band and VHF signals, or at least to verify the TEC along a few lines-of-sight for instantaneous calibration of EUV images. We have demonstrated a capability of using L-band signals to do ionospheric tomography, but further study is needed to assess our capability of imaging the plasmasphere at R >, 4 RE Figure 2 shows a small but representative sample of VHF lines-of-sight that could be used for constructing radio “images” of the outer plasmasphere.
TEC data can also be interpreted through a variational (or parametric) approach, in which the electron density is made dependent on a convenient number of adjustable parameters whose values can he determined by making a least-squares fit to the available TEC data To test the feasibility of using radio waves from GPS to map the distribution of magnetospheric plasma, we first postulate an electron-density model with adjustable parameters. To the extent that variation of these parameters one-by-one leads to comparable variation in TEC along appropriate lines-of-sight, the contemplated mapping should be reliable. For illustrative purposes we use a model of the form
+6
+4
+2
0
-2
-4
-6 +8 +6 +4 +2 0 -2 -4 -6 -8
Fig. 2. Contours represent logto(TEC, unm2) between hypothetical tmnsmitters in YZ plane and observer at X = -10 RE along Earth-Sun line (Y = 2 = 0). Symbols show a sampling of lhre-of-sight intemections with (and projections to) the YZ plane for GPS cross-ranging signals observable at sekted magnetic latitudes (0 = +30”, 0 the X2 (noon-midnight meridional) plane.
= -3O”, A = +60°, A = -60’) along orbit at R = 10 RE in

(IO)204 Y. T. Chiu et al.
N, = 103(4RE/R)4 cms3 + (1/~54)(4R~R)~~ crnm3 (inside the plasmasphem) (2@
N, = (4R~R~4 cm-3 -I- (1/~)(4R~R~l2 cmB3 (outside the ~1~~~~ (2@
but the leading factors 103, 4, 1 and l/64 are subject to adjustment, as are the exponents 4 and 12. We associate the terms proportional to RA in (1) with hydrogen plasma (balanced by protons) and the terms proportional to R-l2 in (1) with oxygen plasma (balanced by O+). Thus, we have (in effect) already modeled the 0+ density as (l/#)(4R~R)~2 c-mm3 with no discontinuity at the plasmapause. Any of the model parameters could be allowed to vary with magnetic local time, but a stronger ~~u~~ Gwen is built into the present model through the shape of the plasmapause, which we model (cf. /2/) as satisfying the cubic equation
(4/27)(Llf&2sin$ - (Lo/L) -I- 1 = 0 (3)
where 4, denotes magnetic local time and Lo is an ~jus~~e parameter equal to the value of L attained on the plasmapause at noon (I$ = rr) and midnight ($I = 0). Our plasmapause reaches out to L = Lmax = l.SLu at 4, = 37c/2 (i.e., on the dusk meridian) and to L = Lmin = 0.8941Lo at Q, = 7c/2 (i.e., on the dawn meridian). The equation of a dipolar magnetic field line (R = L sin20, where 8 = magnetic colatitude) thus permits any point (R, 8, 4) in space to be classified as being either inside or outside the model plasmasphere. This cocoon is needed in order to choose between (2a) aud (28) for each point of interest. Figure 2 shows model TEC contours between ~~rni~ers in the YZ plane (g~n~c-sol~~lip~c system) and an receiver at (X , Y, z) = (-10 RE, 0,O) for Lo = 4. Representative VHF lines of sight from GPS satellites to observers at latitudes 530” and &60” in the XZ plane cross the YZ plane at the points marked.
The “theoretical” TEC along any line of sight can be extracted from (2)--(3) in essentially closed form by evaluating indefinite integrals of the form
dx 1 ($ *X2)n12 = p”-’
COS”-~ yf dw ,
Fit: a = 3.687
N
6. = 3.202 TECU
‘2: 8
5-““““t”“““’ 0 10 20 30 40 50 60
ELEVATION, degrees
(4)
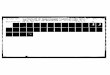
Fig. 3. Observed (e) and optimally fitted (solid curve) TOPEX/GPSR “raw” TEC Irro
files from a mpmsentative pass at high elevation angle (1 TEC unit = 1016 mm2 = 1012 an- ). indicates instrumental or other bias.
Offset (A) The other fitted parameters are a and N,, such that N, =
(R~R)~N~ The pearly “true” TEC is retrieved by su~~ting A from the “raw” TEC deduced from (1).

Spaceborne GPS Receiver (lOzo5
for integer values of n. The parameter p in (4) denotes the shortest distance from the geocenter to the line- of-sight (extended if necessary). The integral is reduced to uigonometic form by substituting x = p tan VT. Limits of apron in (4) would correspond to the biter and receiver positions, as well as to intersections of the line-of-sight with the model plasmapause. As the adjustable density pammeters in (2) enter the expression for TBC linearly, they define a least-squares problem with respect to global TBC data.
In an ahemative modeling study (cf. Figure 3) we have expressed the electron density N, as (R~R)W, and the TEC inferred from (1) as
I remr
“Raw” TEC = N,ds+A, (5) xmtr
where A represents a constant offset (one interpretation of which is a relative instrumental delay between the Ll and L2 GPS signals) which should be subtracted fmm the “raw” TEK in order to obtain the true TEC. The hassle parameters A and N, in this fo~~~on enter the TEC linearly, while the adjustable exponent a enters nonlinearly. We have applied this method for retrieving election density information to TOPEX/ GPSR data Figure 3 shows results from a typical pass. The two-frequency data thus seem to yield a reasonable fit to a power-law density distribution, and the retrieved vahte of a is within the exm range (- 4&l). Moreover, the magnetosphere-ionosphere interface region (IMIR) revealed in Figure 3 is not smooth, and its structure can be probed by means of GPS signals.
IONOSPHERIC RETRIEVALS
In order to map and do tomography on the IMIR, we must also monitor the ionosphere on a global scale. If the ionosphere is assumed to be static during any orbit of the observer/imager, the multidimctional TECs derived from L-band GPS signals (see Figure 1) will cross-cover the global ionosphere sufficiendy to yield true tomo~y. Since each contact between a low altitude satellite and a GPS satellite provides TEC measurements that scan the IMIR, ~tio~ information can be derived from comb&d VHF and L-band TEC data Whenever the line-of-sight intersects me ionosphere at altitudes > 100 km, a time-ordered set of TEC measumrnents is obtained (see Figure 3). The global set of TEC measmements can be deconvolved with algorithms of various sophistication m obtain a global ionospheric electmn density distribution. The configuration of observer/imager and multiple GPS orbits makes it possible to construct a data base of ionospheric and pl~rn~p~dc ele~n-~~i~ profiles covering a wide range of latitudes, lon~~~s, altitudes, and sun angles. For 3-D tomography, we have developed a matrix-inversion and smoothing technique to retrieve the ionosphere globally, using the L-band slant TEC data base. The global ionosphere is assumed to consist of ionospheric cohurms with lateral extent gridded on a sphere. Each column is also gridded into vertical profile elements. Tomography on this 3-D grid becomes a matrix-inversion and smoothing problem, which we have solved and verified with end-to-end simulations by computer. The smooth joining together of the L-band ion~p~~ smoggy with the VHF pl~rn~~~c rn~~g will yield a 3-D tomography of the ionosphe~-plummet interface region.
ACKNOWLEDGMENTS
The authors thank W. A, Feess and A. B. Prag of ‘Ihe Aerospace Corporation for having provided the TOPEX data in a useful format from the BODHI GPS data archive at JPL. We also thank D. L. Murphy for ~~~~ advice on the project. This work was apex by the ~~~~ Research and Development m&D) program of the Lockheed Missiles and Space Company.
REFERENCES
1. Y. T. Chiu, Prospects for optical and radio-wave remote imaging of high latitude exospheric processes, Adv. Space Rex., 12, #8,395~, 1992. 2. H. Volland, Models of global electric fields within the magnetosphere, Ann. G&@rys., 31, 154-173, 1975.