Embed Size (px)
Citation preview
Louise MLouise MccGowan Ken MillardGowan Ken Millard
Kevin Pearce Daniel RiceKevin Pearce Daniel Rice
A Dalhousie Design Project PresentationA Dalhousie Design Project PresentationGroup 6 03 December, 2004 Group 6 03 December, 2004
Joint-service Active Watch Joint-service Active Watch Surveillance SubmersibleSurveillance Submersible
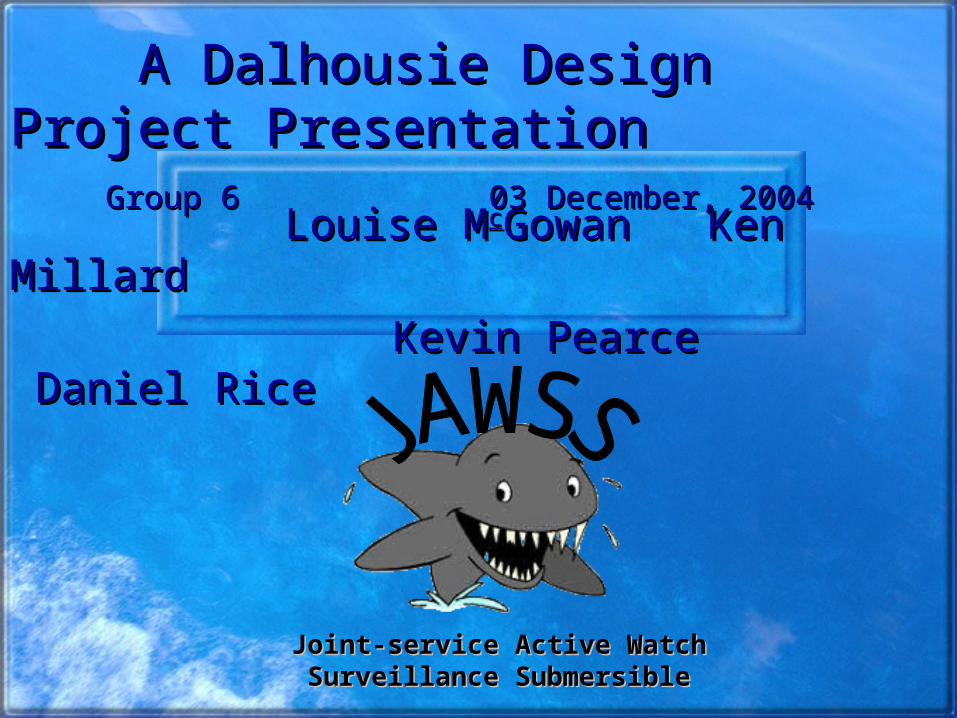
IntroductionIntroduction
What is JAWSS?What is JAWSS?
What Does it Do?What Does it Do?
Main Purpose?Main Purpose?
Courtesy HMCS Iroquois
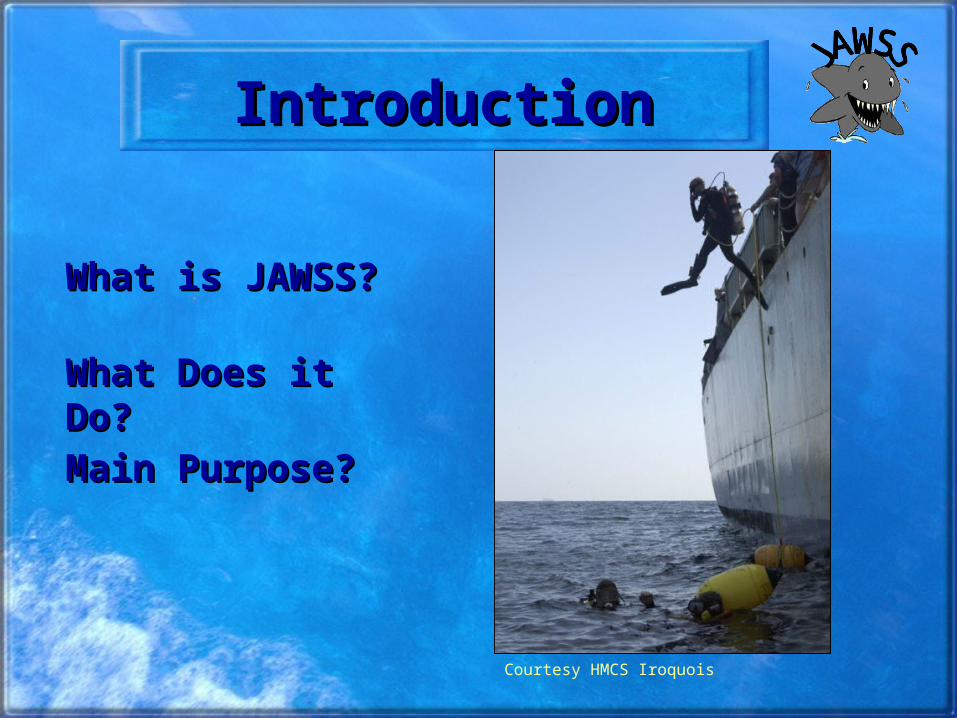
• Inexpensive Inexpensive ConstructionConstruction
• Ease of UseEase of Use• Practical ApplicationPractical Application
JAWSSJAWSS
Design Design RequirementsRequirements
SeaworthinessSeaworthiness1.1. WatertightWatertight
2.2. BuoyancyBuoyancy
3.3. RecoveryRecovery
Displacement (total) = Displacement (hull) + Displacement (h. thrusters) + Displacement (dome) + Displacement (cage) – 60% Displacement (v. thrusters)
0.01386 m3 ----------- 13.81 kg (FW) 14.2 kg (SW)
ManeuverabilityManeuverability
1.1. SpeedSpeed2.2. Degrees of freedom (DOF)Degrees of freedom (DOF)3.3. Controlled by 1 person, tetheredControlled by 1 person, tethered
Fd = Cd * ½(ρV2A)Cd (cylinder) = 1.5 Cd (circular strut) = 1.2
V = 1.03 m/s (@ 2 knots)
ρ = 1025.2 kg/m3
Initial Drag Estimates: 30 NInitial Drag Estimates: 30 N
PropellersPropellers
Initial propeller designs were Initial propeller designs were estimated using Gawn Data estimated using Gawn Data crossplots:crossplots:BAR = 4(Ad)/Πd2 = 0.0005/d2 = 0.2
Kt/J2 = T/(ρd2V2) = 2 P/d = 0.51
Kt= 0.005 J2 /d2 J = 0.13
n = V * (30.88)/dJ = 11 402 rpm
Friction to Power ratio tests will be undertaken on 3 and 4 blade props.
P = 0.0255 m
d = 0.05 m
n = 11 500 rpm
Courtesy PBS.com : NOVA
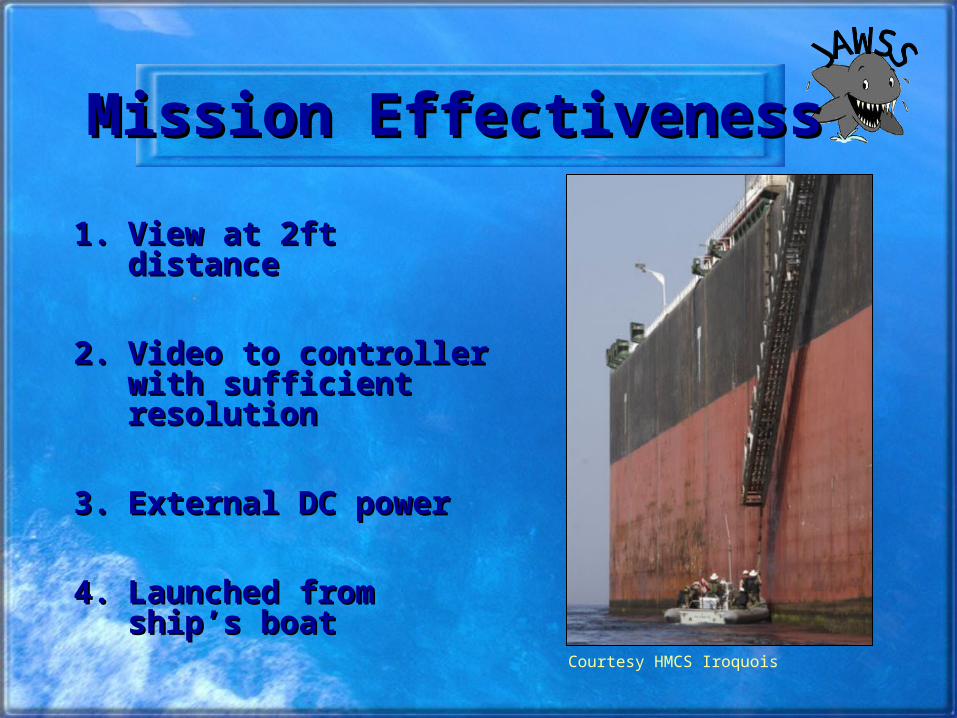
Mission EffectivenessMission Effectiveness
1.1. View at 2ft distance View at 2ft distance
2.2. Video to controller Video to controller with sufficient with sufficient resolutionresolution
3.3. External DC powerExternal DC power
4.4. Launched from ship’s Launched from ship’s boatboat
Courtesy HMCS Iroquois
““The prelude to The prelude to action is the work of action is the work of
the Engine Room the Engine Room Department”Department”
Admiral Jellicoe, 1916
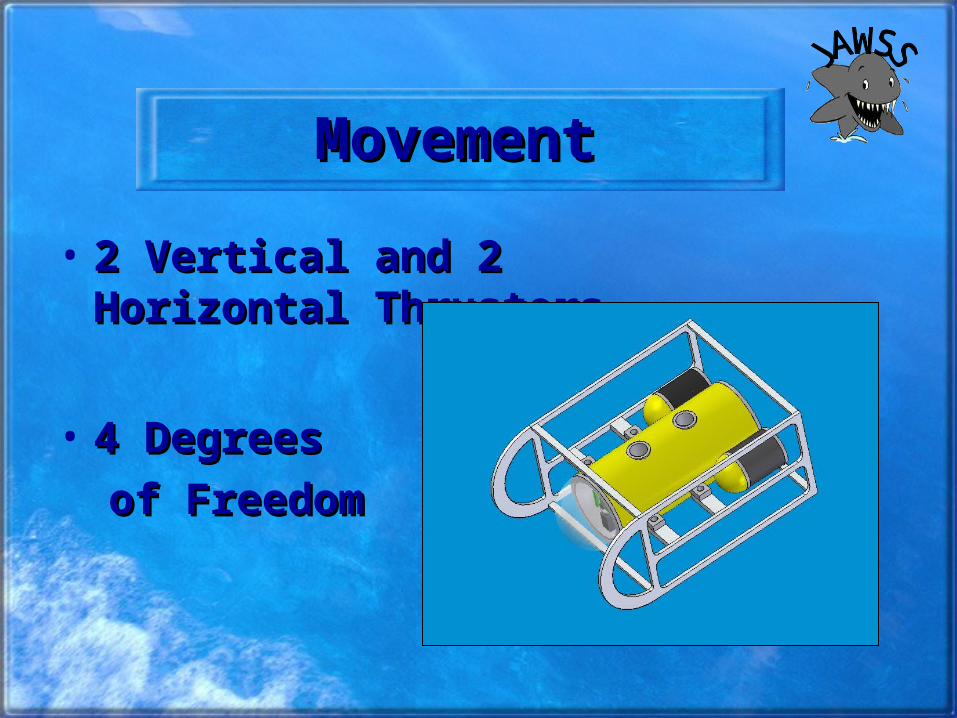
MovementMovement
• 2 Vertical and 2 2 Vertical and 2 Horizontal ThrustersHorizontal Thrusters
• 4 Degrees 4 Degrees
of Freedomof Freedom
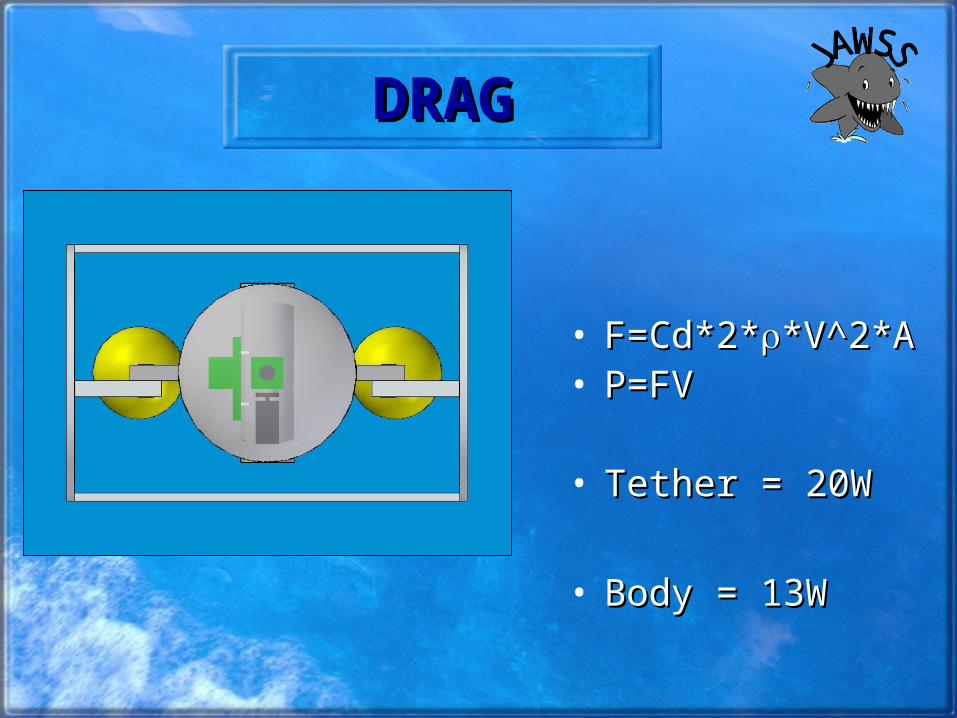
• F=Cd*2*F=Cd*2**V^2*A*V^2*A• P=FVP=FV
• Tether = 20WTether = 20W
• Body = 13WBody = 13W
DRAGDRAG
• 12 Volt motors 12 Volt motors
• 1-4A1-4A
• Based on drag Based on drag testingtesting
MotorsMotors
Courtesy RadioShack.ca
Douglas AdamsDouglas Adams
““A common mistake that A common mistake that people make when trying people make when trying to design something to design something completely foolproof was completely foolproof was to underestimate the to underestimate the ingenuity of complete ingenuity of complete fools.”fools.”
Initial goals:Initial goals:• Return video to Return video to
surfacesurface• 3 Degrees of 3 Degrees of
FreedomFreedom• Controllable by 1 Controllable by 1
personperson
Control Systems: Control Systems: GoalsGoals
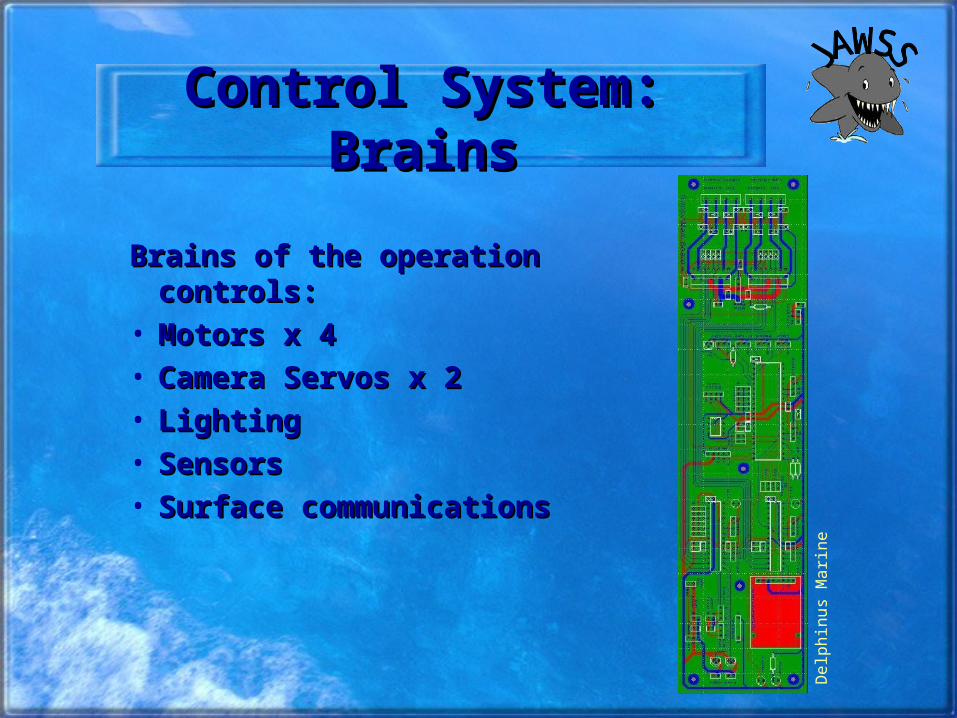
Brains of the operation Brains of the operation controls:controls:
• Motors x 4Motors x 4• Camera Servos x 2Camera Servos x 2• LightingLighting• SensorsSensors• Surface communicationsSurface communications
Control System: Control System: BrainsBrains
Del
phin
us M
arin
e
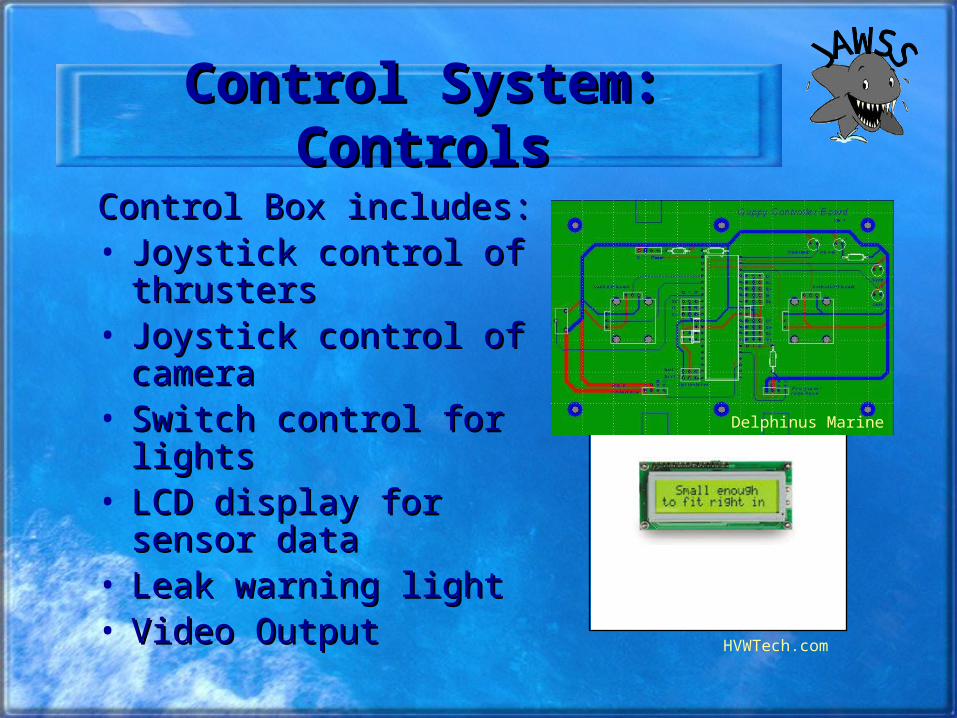
Control Box includes:Control Box includes:• Joystick control of Joystick control of
thrustersthrusters• Joystick control of Joystick control of
cameracamera• Switch control for Switch control for
lightslights• LCD display for sensor LCD display for sensor
datadata• Leak warning lightLeak warning light• Video OutputVideo Output
Control System: Control System: ControlsControls
HVWTech.com
Delphinus Marine
Onboard sensorsOnboard sensors include:include:
• Leak detectionLeak detection• Pressure (= depth)Pressure (= depth)• External TemperatureExternal Temperature• Internal TemperatureInternal Temperature
National Semiconductor
Honeywell
Control System: Control System: SensorsSensors
““For every action For every action there is an equal and there is an equal and opposite government opposite government program.”program.”
Bob WellsBob Wells
Chosen: 12V DC Power Chosen: 12V DC Power supplysupply
Weight of submersible Weight of submersible reducedreduced
Unlimited # of batteries Unlimited # of batteries Power could originate Power could originate
from power inverterfrom power inverter
JAWSS Power JAWSS Power SupplySupply
www..napaautoparts.ca
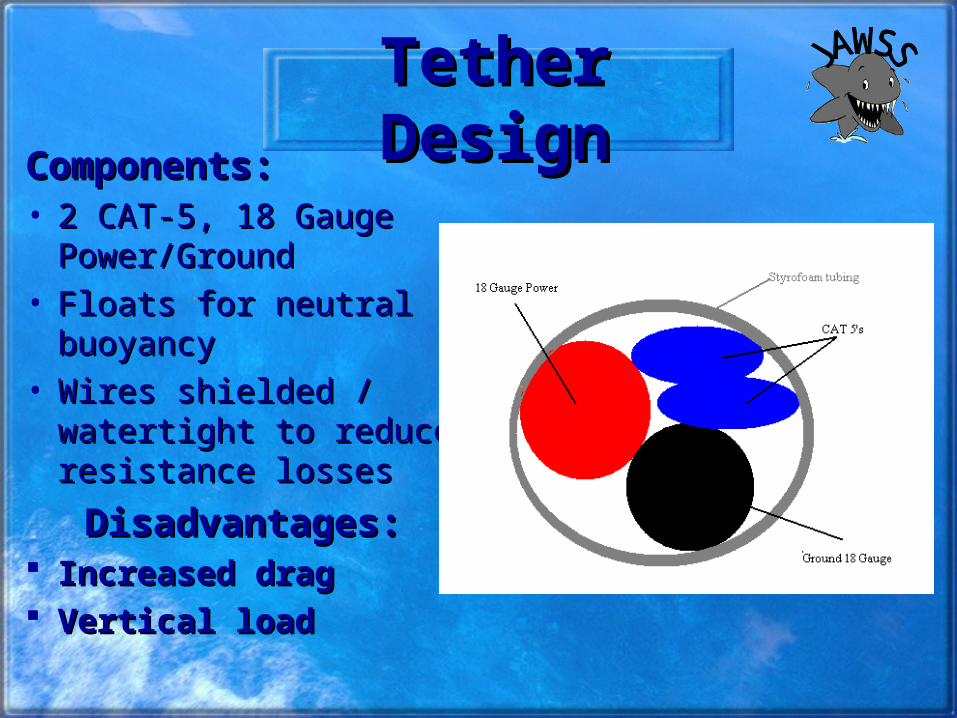
Components:Components:• 2 CAT-5, 18 Gauge 2 CAT-5, 18 Gauge
Power/GroundPower/Ground• Floats for neutral Floats for neutral
buoyancybuoyancy• Wires shielded / Wires shielded /
watertight to reduce watertight to reduce resistance lossesresistance losses
Disadvantages:Disadvantages: Increased dragIncreased drag Vertical loadVertical load
Tether Tether DesignDesign
• 11stst Test: Logitech webcam Test: Logitech webcam• 22ndnd Test: CCD Camera from security Test: CCD Camera from security
type cameratype camera
• Chosen: PC169XS CCD camera due to Chosen: PC169XS CCD camera due to its:its:
Low light visibility characteristicsLow light visibility characteristics Low WeightLow Weight Small size (1.5 sq in.)Small size (1.5 sq in.) Low current draw (110 mA )Low current draw (110 mA )
Camera Camera SelectionSelection
SuperCircuits.com
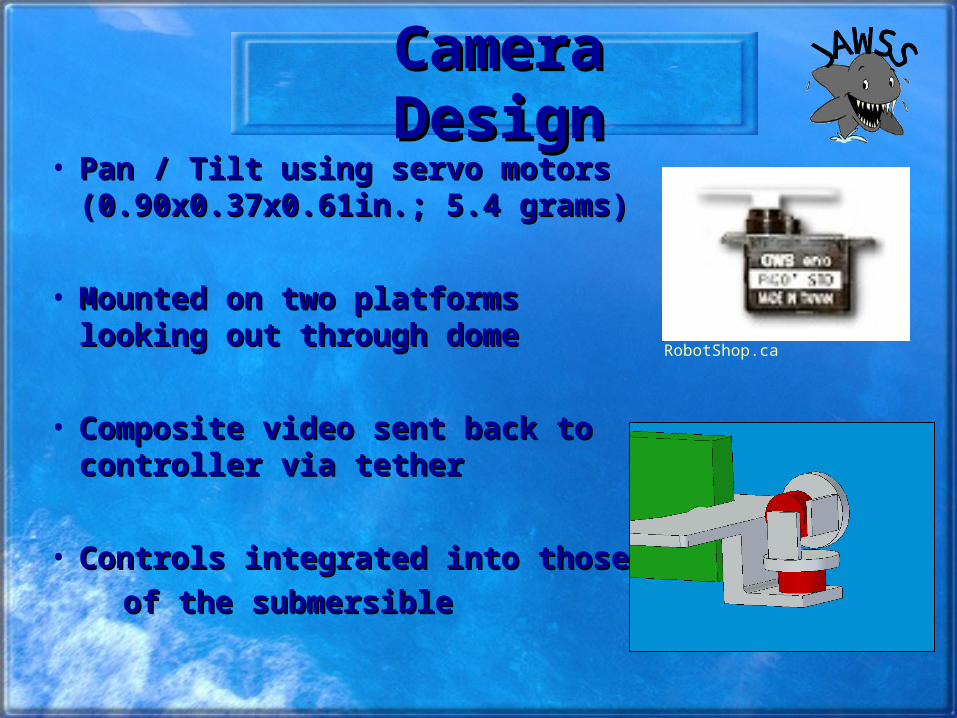
• Pan / Tilt using servo motors Pan / Tilt using servo motors (0.90x0.37x0.61in.; 5.4 grams)(0.90x0.37x0.61in.; 5.4 grams)
• Mounted on two platforms Mounted on two platforms looking out through domelooking out through dome
• Composite video sent back to Composite video sent back to controller via tethercontroller via tether
• Controls integrated into those Controls integrated into those
of the submersibleof the submersible
Camera Camera DesignDesign
RobotShop.ca
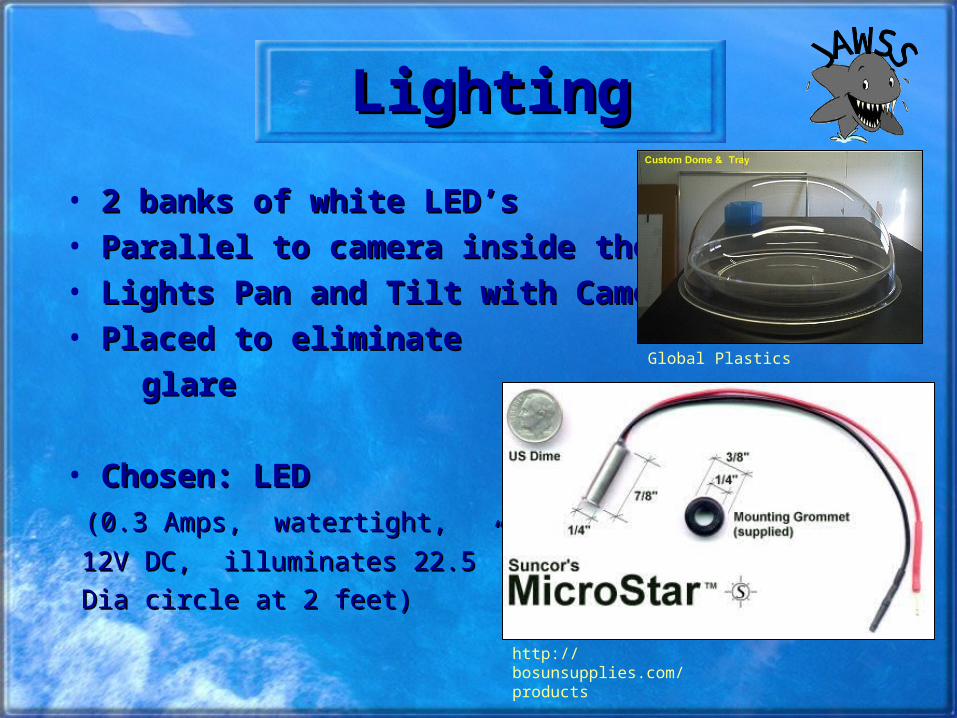
LightingLighting
• 2 banks of white LED’s 2 banks of white LED’s • Parallel to camera inside the domeParallel to camera inside the dome• Lights Pan and Tilt with CameraLights Pan and Tilt with Camera• Placed to eliminate Placed to eliminate
glareglare
• Chosen: LEDChosen: LED (0.3 Amps, watertight,(0.3 Amps, watertight,
12V DC, illuminates 22.5” 12V DC, illuminates 22.5”
Dia circle at 2 feet)Dia circle at 2 feet)
http://bosunsupplies.com/products
Global Plastics
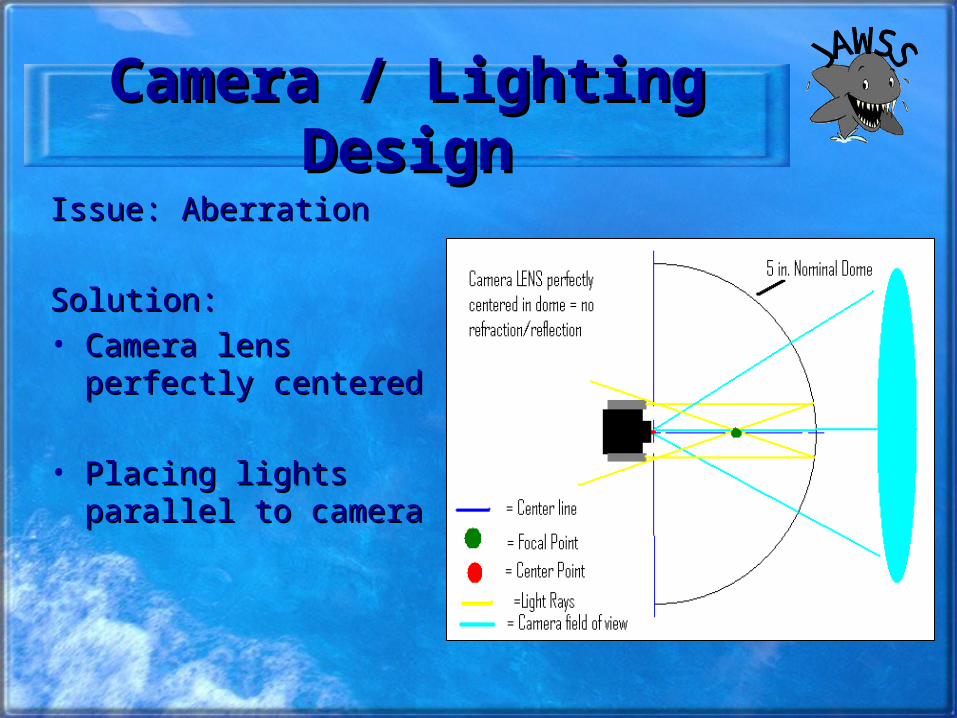
Camera / Lighting Camera / Lighting DesignDesign
Issue: AberrationIssue: Aberration
Solution:Solution:• Camera lens Camera lens
perfectly centeredperfectly centered
• Placing lights parallel Placing lights parallel to camerato camera
The Way AheadThe Way Ahead
• ConstructionConstruction
• TestingTesting
• AssessmentAssessment
DRDC (Atlantic) Acoustic BargeDRDC (Atlantic) Acoustic Barge
Courtesy DRDC (Atlantic)

JAWSS Proud JAWSS Proud SupportersSupporters
Delphinus Marine TechnologiesDelphinus Marine TechnologiesAncaster, ON, CanadaAncaster, ON, Canada
DRDC AtlanticDRDC Atlantic
DND: Fleet Maintenance DND: Fleet Maintenance Facility, Cape ScottFacility, Cape Scott
Digi-Key, USADigi-Key, USA
Alberta Alberta Printed Printed CircuitsCircuits
ConclusionConclusion
• SSituationituation• MMissionission• EExecutionxecution• SService and Supportervice and Support• CCommand and ommand and
SignalsSignals
QUESTIONS ?QUESTIONS ?
Thank-You!















![Genetica [Pearce]](https://img.pdfslide.us/doc/110x75/55cf9759550346d033912206/genetica-pearce.jpg)