Embed Size (px)
Citation preview

Location and Position MeasurementsPresentation forLicentiate course in measurement science and technology
Marion Hermersdorf
28.03.2007

2 2007
Motivation (1/2)
Smart Environments
Internet of Things
Logistics
Person Tracking
Asset Tracking
Animal/Pet Tracking
Context Awareness
Sensor Networks
Photo Meta Data
Safety
Surveillance & Security
Games
Location Based Services
Location
E911

3 2007
Motivation (2/2)

4 2007
Table of Content
Introduction
Positioning Methods
Positioning Technologies
Special focus onRepresentation of positionGPSWLAN based positioning

5 2007
Overview
IntroductionPosition verses Location
Mobile Positioning
Description of Position
Position Accuracy
Challenges
Positioning Methods
Positioning Technologies

6 2007
Position verses Location
The term position is used to express the capability of locating the physical position of an object in a pre-determined space
e.g. indoor positionGPS location

7 2007
Mobile Positioning
Determining the position of a person or object that is changing position.
Use of devices that are positioned at know locations.

8 2007
Description of PositionAbsolute locations share a common, global, coordinate system, e.g. longitude/latitude.
Relative locations may have a different frame of reference, e.g. in buildings.
Symbolic locations are names. They are more significant to a human than a pair of numbers, e.g. “home”, “work”.

9 2007
Absolute Position (1/3)
How to describe a certain location on earth?
The earth is not round !
Use of geoid to describe Earth.
Ellipsoid = approximation to geoid.

10 2007
Absolute Position (2/3)
How convert an ellipsoid into a map?
Geodetic datum (=map system) defines how a coordinate system is seated over the ellipsoid.
Australian National
International 1924
International 1924
WGS84
Ellipsoid
-120-96-87Western Europe
EUR-A
149-48-134AustraliaAUG
-120-95-87Finland, Norway
EUR-C (KKJ)
000AllWGS84
dZ [m]dY [m]dX [m]Used byDatum

11 2007
Absolute Position (3/3)
How to describe a location on the map?
Coordinate system.
Coordinate systems:
Longitude/latitude/heightUniversal Transverse Mercator (UTM)ECEF X, Y, ZWorld Geographic Reference System
(GEOREF)Military Grid Reference System (MGRS)
Position data formats (mostly WGS84 based):
Geo (simple, long./lat.)GPX (GPS Exchange Format)KML (Google Earth, long./lat.)
12 2007
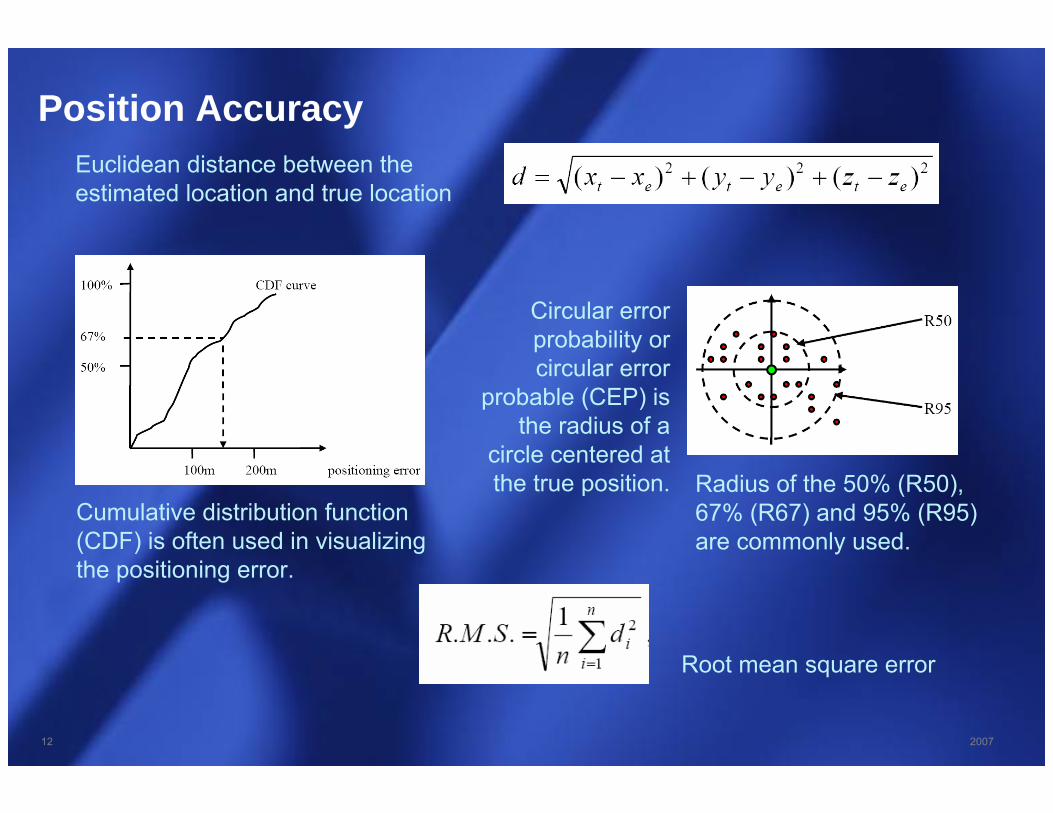
Position AccuracyEuclidean distance between the estimated location and true location
Circular error probability or circular error
probable (CEP) is the radius of a
circle centered at the true position.
Cumulative distribution function (CDF) is often used in visualizing the positioning error.
Radius of the 50% (R50), 67% (R67) and 95% (R95) are commonly used.
Root mean square error

13 2007
Challenges
It has to work everywhere and anytime
E.g. in buildings, in dense cities, underground, outsides
People spend 80-90% of their time indoors
70% of cellular calls and 80% of data connections originate from
indoors. (Source Strategy Analytics)
It has to provide appropriate accuracy
E.g. “ Where are my keys?” => about 10cm, indoors“ Where is the digital oscilloscope?” => a few meters, indoors“ Where is the nearest pizza place?” => about 10 meters, outdoors
Privacy and usability

14 2007
Overview
Introduction
Positioning MethodsMobile verses Network Base Positioning
Radio Signal Propagation
Signal Strength Measurement
Signal Signature
Time Measurement
Angle of Arrival Measurement
Proximity
Positioning Technologies

15 2007
Mobile verses Network Base Positioning
Mobile Based Positioning
The mobile device is measuring and calculating the position.Advantages: - privacy
- availability (no connection to network/service) required.Disadvantage: - measurements consume power
Mobile Assisted Positioning
The mobile device is measuring and send the data to the location server, which calculates the position.
Network Based Positioning
The network device is measuring and calculating the position.Advantages: - low power consumption on mobile device.Disadvantage: - Privacy control lost.
- Connection to location server needed.

16 2007
Radio Signal Propagation

17 2007
Signal Strength Measurement
Signal strength is proportional to the distance
RSS: received signal strengthPt: transmitted powerα: distance-power gradient (constant in open spaces)d: distanceX: shadow fading
Line-of-sight required !
Triangulation and the knowledge of the
signal sources provides location.
18 2007
Signal Signature
Methods:
Least mean square (LMS) method
K-nearest neighbor
Fuzzy logic
Neural systems
Applied:
GSM positioning
WLAN positioning
Reference fingerprint (training) data collection

19 2007
Time Measurement
Time of arrival - ToA
The time needed for the signal to travel from the source to the receiver. The time is proportional to the distance.Triangulation of three signals provide the location.
Round-trip time or time reference.
Time difference of arrival - TDoA
The time difference of a signal received at a know location (base station) and at a unknown
location (mobile device) is measured.

20 2007
Angle of Arrival Measurement
Direction/angle of arrival – DoA or AoA
This method uses multiple antennas at a base station to determine the incident angle of an arriving signal.

21 2007
Proximity
Detection of proximity to a devices at a certain know location.
E.g.: RF radio (CellID, Bluetooth, RFID)light barriercomputer login

22 2007
Overview
Introduction
Positioning Methods
Positioning TechnologiesGPSCellular NetworkWireless LANUltra Wide BandWiMaxDigital TVShort Range RadiosUltrasonicInfraredCamera AssistedSensor AssistedHybrid Solution

23 2007
Global Positioning System – GPS (1/4)
Position calculation is based on time measurements.
24 satellites ensure a visibility of at least 4 satellites.
Fully operational in 1994.
Line of sight required (only outdoors).
Position accuracy of up to 3 meters (commonly 5-20m).
Differential GPS (D-GPS) is an enhancement that uses a network of fixed ground based reference stations.
Assisted GPS (A-GPS) uses cellular networks (like GSM/UTMS) to provide position information indoors and in urban canyons and give a fast position fix.
GLONASS (Russian system)Galileo (test phase 2008)Beidou (Chinese system)

24 2007
Global Positioning System – GPS (2/4)
Pseudorandom code (C/A)
Satellite unique code.1,023 bit long pseudo-random code. Repeated every millisecond.Is used to calculate the time of flight on
the GPS receiver.
Navigation message
Contains ephemeris and almanac data.Almanac data provides coarse information
about location and health of all satellites and current time.
Ephemeris data provides detailed (actual/corrected) location information of satellite for next 6h.
Takes several minutes to receive data (cold start).
time of flight + satellite location = position

25 2007
Global Positioning System – GPS (3/4)
Distance information of two satellites => position on the edge of a circle
Distance information of three satellites => position at two points
=> Distance information of four satellites => distinct position available

26 2007
Global Positioning System – GPS (4/4)
Solutions for indoors
Pseudolites (centimeter accuracy)
Increased sensitivity of receiver.
A-GPS
27 2007
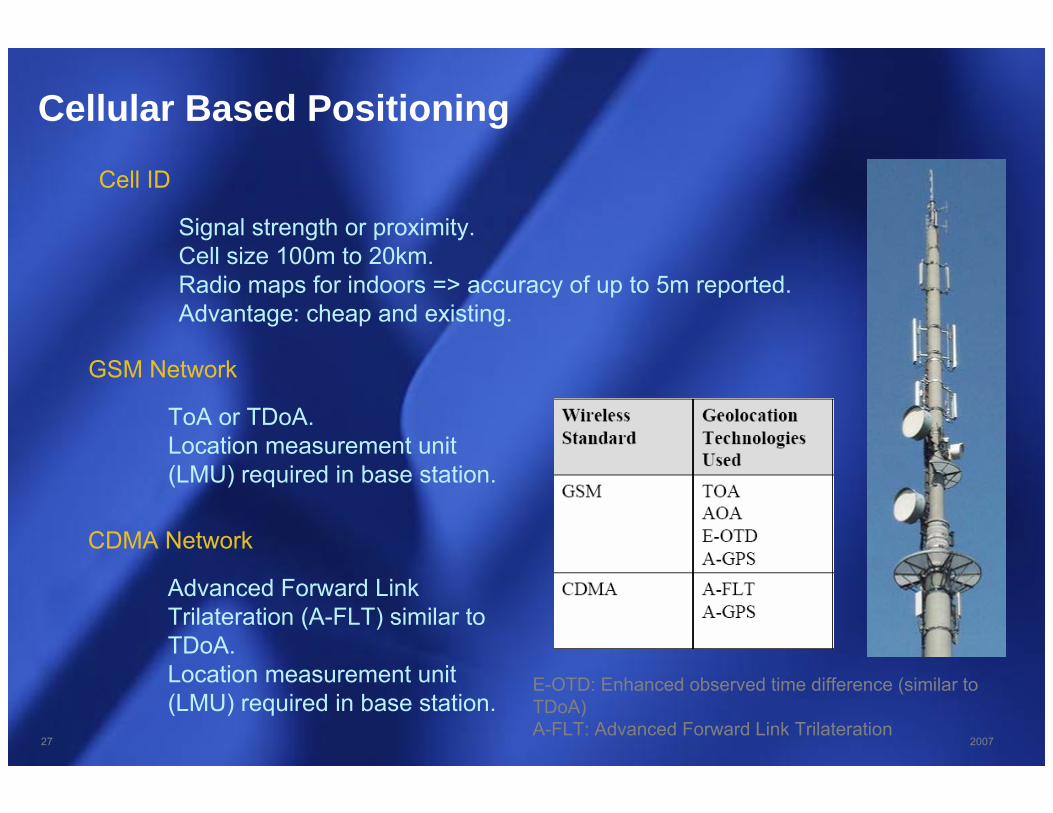
Cellular Based Positioning
Cell ID
Signal strength or proximity.Cell size 100m to 20km.Radio maps for indoors => accuracy of up to 5m reported.Advantage: cheap and existing.
GSM Network
ToA or TDoA.Location measurement unit (LMU) required in base station.
CDMA Network
Advanced Forward Link Trilateration (A-FLT) similar to TDoA.Location measurement unit (LMU) required in base station.
E-OTD: Enhanced observed time difference (similar to TDoA)A-FLT: Advanced Forward Link Trilateration

28 2007
Wireless LAN Positioning (1/4)
Principle
Measurement of distance to WLAN access points.
Triangulation.Information of location of WLAN access
points required.
Advantages
Works also indoors.No additional infrastructure/technologies
required.
Disadvantages
Knowledge of location of WLAN access points required (work effort).
Accuracy normally lower than GPS.Only works in dense urban areas.

29 2007
Wireless LAN Positioning (2/4)
Real-time indoor positioning
Asset and people tracking inclosed and defined environment(1-3m accuracy)
Training data needed -> no largescale implementation possible
Offered by Ekahau, Cisco,AeroScout and others.
Lacks coverage
Large scale indoor positioning
WiFi database
Limited positioningresolution and accuracy
Large scale implementation possible
Lacks accuracy

30 2007
Skyhook map
Wireless LAN Positioning (2/3)

31 2007
Wireless LANPositioning (4/4)
WLAN access points in Helsinki area gathered by
“war-drivers”

32 2007
Ultra Wide Band Positioning
Wide bandwidth (typically > 1 GHz) enables very fine time measurements
ToA/TDoA measurements and trilateration
30 cm accuracy
Line-of-sight (LOS) required.
Discrimination between multipath components.
Proprietary art solutions (e.g. GeoDan)

33 2007
Short Range Radios
Bluetooth
Limited range (5-10m).Highly distributed.Complex and long scan procedure.Very power hungry.
RFID
Very short range (1-3m).Low cost.Low power.
Others
WibreeZigbee
34 2007
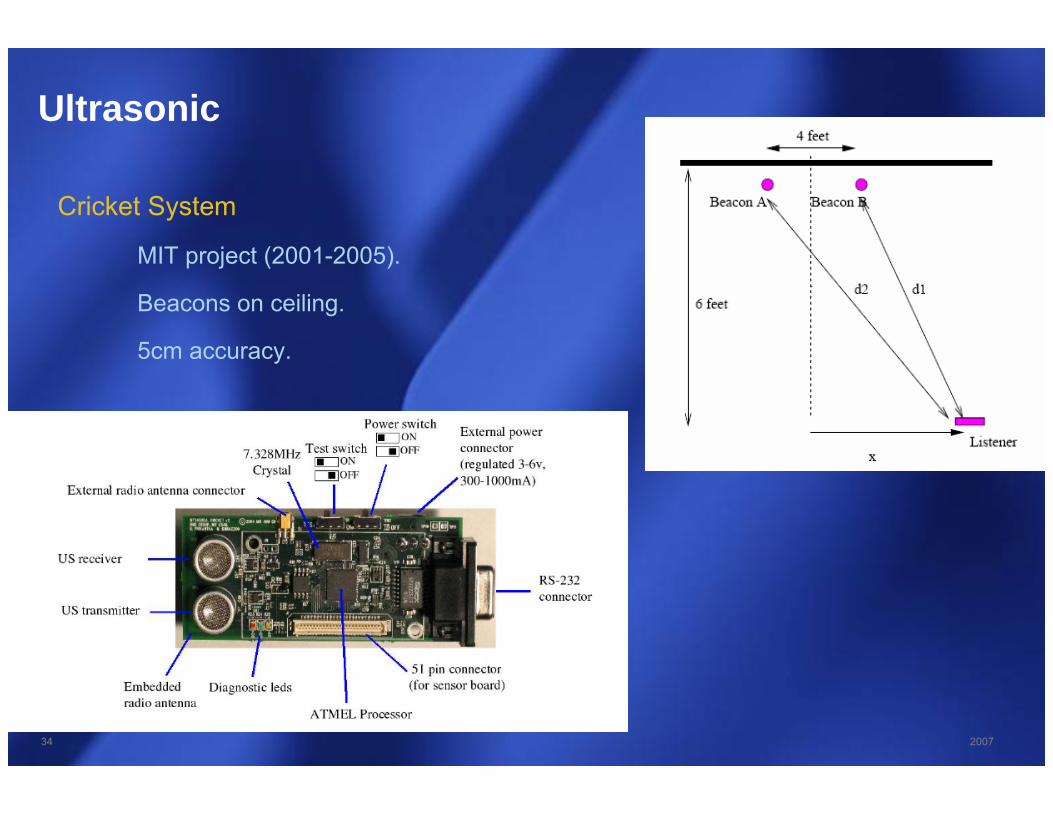
Ultrasonic
Cricket System
MIT project (2001-2005).
Beacons on ceiling.
5cm accuracy.

35 2007
Infrared

36 2007
Camera Assisted
Mapping of base stations or sensor nodes
Scene analysis

37 2007
Sensor Assisted
Use of magnetometer, accelerometer, barometer and gyroscope.
Calibration frequently needed (drifting over time).

38 2007
Conclusion
Different use cases require different technologies.
Hybrid solutions are the key.
39 2007
Thank you
for your
attention.