Embed Size (px)
Citation preview

This article was downloaded by: [University of New Mexico]On: 01 October 2014, At: 03:41Publisher: Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954 Registered office: MortimerHouse, 37-41 Mortimer Street, London W1T 3JH, UK
Ships and Offshore StructuresPublication details, including instructions for authors and subscription information:http://www.tandfonline.com/loi/tsos20
Load calculation methods for offshore wind turbinefoundationsPatrik Passona & Kim Brannerb
a RAMBOLL, Offshore Wind Department, Esbjerg, Denmarkb Department of Wind Energy, Technical University of Denmark, Roskilde, DenmarkPublished online: 06 Aug 2013.
To cite this article: Patrik Passon & Kim Branner (2014) Load calculation methods for offshore wind turbine foundations,Ships and Offshore Structures, 9:4, 433-449, DOI: 10.1080/17445302.2013.820108
To link to this article: http://dx.doi.org/10.1080/17445302.2013.820108
PLEASE SCROLL DOWN FOR ARTICLE
Taylor & Francis makes every effort to ensure the accuracy of all the information (the “Content”) containedin the publications on our platform. However, Taylor & Francis, our agents, and our licensors make norepresentations or warranties whatsoever as to the accuracy, completeness, or suitability for any purpose ofthe Content. Any opinions and views expressed in this publication are the opinions and views of the authors,and are not the views of or endorsed by Taylor & Francis. The accuracy of the Content should not be reliedupon and should be independently verified with primary sources of information. Taylor and Francis shallnot be liable for any losses, actions, claims, proceedings, demands, costs, expenses, damages, and otherliabilities whatsoever or howsoever caused arising directly or indirectly in connection with, in relation to orarising out of the use of the Content.
This article may be used for research, teaching, and private study purposes. Any substantial or systematicreproduction, redistribution, reselling, loan, sub-licensing, systematic supply, or distribution in anyform to anyone is expressly forbidden. Terms & Conditions of access and use can be found at http://www.tandfonline.com/page/terms-and-conditions

Ships and Offshore Structures, 2014Vol. 9, No. 4, 433–449, http://dx.doi.org/10.1080/17445302.2013.820108
Load calculation methods for offshore wind turbine foundations
Patrik Passona∗ and Kim Brannerb
aRAMBOLL, Offshore Wind Department, Esbjerg, Denmark; bDepartment of Wind Energy, Technical University of Denmark, Roskilde,Denmark
(Received 27 April 2013; final version received 25 June 2013)
Calculation of design loads for offshore wind turbine (OWT) foundations is typically performed in a joint effort betweenwind turbine manufactures and foundation designers (FDs). Ideally, both parties would apply the same fully integrated designtool and model for that purpose. However, such solutions are rather limited as it would require exchanging confidential dataand the need of sophisticated modelling capabilities for all subsystems of the OWT. In practice, this leads to an iterativeand sequential load calculation process involving different design tools. In this process, the wind turbine manufacturerprovides the FD with dynamic responses obtained from aeroelastic simulations at a predefined interface. These responsesare subsequently expanded to the corresponding dynamic responses in all structural parts of the foundation. In this article, anovel load calculation method, for the expansion to dynamic foundation responses based on an inverse dynamics algorithm,is introduced and described in detail. Furthermore, a summary of load calculation methods currently applied for the designof bottom-mounted OWTs foundations is provided and compared with the proposed method. While emphasis is given tojacket-type foundations, the methods are considered applicable for other bottom-mounted foundation types as well. All loadcalculation methods are applied and evaluated for an exemplarily fatigue design scenario from the perspective of an FD inorder to establish more confidence in these methods. The article concludes with an assessment and recommendation for allpresented load calculation methods.
Keywords: offshore wind; foundation design; load calculation methods; inverse dynamics
Nomenclature
OWT Offshore wind turbineRNA Rotor–nacelle assemblyWTM Wind turbine manufacturerFD Foundation designerSDOF Single degree of freedomMDOF Multi-degree of freedomIRF Impulse response functionDIRF Discrete impulse response functionui Deflection in direction i = x,y,zFi Force in direction i = x,y,zf (t) Magnitude of excitation at time tu(t) Magnitude of dynamic response to excitation f at
time th(t) Impulse response function (IRF) to a unit impulse
at time tτ Time interval between impulse and corresponding
responset Timeφi Rotation w.r.t axis/direction i = x,y,zMi Moment w.r.t axis/direction i = x,y,zf (ti) Discrete form of f (t), i.e., vector descriptionu(ti) Discrete form of u(t) at time tih(ti) Discrete impulse response function (DIRF) to a
unit impulse at time ti
∗Corresponding author. Email: [email protected]
H(ti) Matrix form of h(ti) for multiple, simultaneousexcitation and response signals
ti Time, i-th time step
1. Introduction
The design of offshore wind turbine (OWT) subsystemssuch as the foundation, tower and controller requires ex-pertise from different fields of technology. In practice, thisis realised by the involvement of specialised parties, typi-cally a wind turbine manufacturer (WTM) and a founda-tion designer (FD), each with their own tools and modelswhich are specifically developed for their respective designtasks. However, the individual subsystems of OWT showa high degree of interactions, for example, resulting fromthe pronounced dynamic behaviour of wind turbines. De-sign load calculations for all OWT subsystems are thereforeperformed in a joint effort between the WTM and FD, re-sulting in an integrated, multidisciplinary design approach.The fully integrated OWT model is shown in Figure 1, in-cluding environmental and loading conditions as well as allpotential interactions. The figure also shows an actual mod-elling approach as often applied in practice for the designof individual subsystems.
C© 2013 Taylor & Francis
Dow
nloa
ded
by [
Uni
vers
ity o
f N
ew M
exic
o] a
t 03:
41 0
1 O
ctob
er 2
014

434 P. Passon and K. Branner
Figure 1. Fully integrated model for OWT (upper) and practical modelling approach for subsystem designs (lower).
Dow
nloa
ded
by [
Uni
vers
ity o
f N
ew M
exic
o] a
t 03:
41 0
1 O
ctob
er 2
014

Ships and Offshore Structures 435
Design loads for OWT subsystems are typically estab-lished in a sequential, multi-step design process due to theinvolvement of different parties and models. Such an ap-proach introduces the necessity to exchange informationregarding structural properties of all relevant subsystemsas well as loads at one or more predefined interfaces, oftenthe connection between the tower and foundation subsys-tem. In consequence, this often leads to a situation in whichthe FD applies a simplified representation of the tower andthe rotor–nacelle assembly (RNA), while the WTM ap-plies a simplified representation of the foundation. Eachof these models are sufficient for their corresponding de-sign and load calculation tasks, but neither of them aresufficient to perform the overall OWT design and load cal-culation individually. Therefore, the WTM performs aeroe-lastic simulations with an integrated OWT model, whichis established with a foundation representation and hy-drodynamic loads provided by the FD. From these aeroe-lastic simulations, the WTM then provides the FD withthe dynamic responses at the interface location. These re-sponses are then subsequently expanded to correspondingdynamic responses in all parts of the foundation in the FDmodel.
This article addresses applicable load calculation meth-ods for the expansion of interface responses in case ofbottom-mounted, space frame foundations such as jackets,from the perspective of the FD. For that purpose, a briefsummary of the design load calculation process is providedin Section 2, followed by an overview of existing load cal-culation methods in Section 3. A novel method, which isbased on inverse dynamics, is introduced in Section 4. InSection 5, all load calculation methods are applied and eval-uated for an exemplarily fatigue design situation from theFD’s perspective using an OWT with a jacket-type founda-tion at a generic offshore site. Finally, summary and con-clusions are provided in Section 6.
2. Design load calculation process for OWT
Design loads for OWT foundations are jointly establishedby the WTM, responsible for the RNA and tower design,and the FD, responsible for the foundation design as out-lined in Section 1 and indicated in Figure 1. In the context ofthe present article, the foundation is defined as the structurebelow tower bottom. Furthermore, the connection betweenthe tower and the foundation is, in the following, denotedas the interface, while the RNA and tower are denoted asthe superstructure. All relevant loads such as simultaneousaerodynamic and hydrodynamic loads need to be consid-ered for the design of the individual components and sub-systems of the OWT. These loads are typically establishedin three subsequent steps after an initial step of preparationfor each design iteration loop, as outlined in Figure 2.
(1) The WTM receives hydrodynamic loads as well as afoundation model in a form applicable for the partic-ular aeroelastic tool from the FD. Here, a preliminaryfoundation design is used in the initial design loop. Thispreliminary foundation design is typically establishedon the basis of limited loading information.
(2) The WTM performs detailed aeroelastic analyses withan integrated OWT model, under consideration of allloads such as simultaneous aerodynamic and hydrody-namic loading. The calculated dynamic responses areused to design the superstructure. At the end of thisstep, time series of load and/or deformation responsesat interface are provided to the FD.
(3) The FD applies the provided interface responses to-gether with all other loads acting directly on the foun-dation in order to calculate the corresponding dynamicresponses in all parts of the structure.
A repetition of the design loop described above is re-quired in case of significant foundation design changes.
Figure 2. Stepwise approach for calculation of OWT foundation loads.
Dow
nloa
ded
by [
Uni
vers
ity o
f N
ew M
exic
o] a
t 03:
41 0
1 O
ctob
er 2
014

436 P. Passon and K. Branner
Figure 3. Equivalent foundation and hydrodynamic excitation generation from the FD model. This figure is available in colour online.
The models and tools employed by the WTM and FD candiffer significantly from each other as they need to ad-dress and focus on very different aspects and subsystems.For example, the WTM uses aeroelastic design tools ded-icated to all relevant details of the superstructure, such asthe controller behaviour and a detailed structural and aero-dynamic description of the blades, while the foundationstructure often is represented by a dynamically equivalent,but simplified model. The FD, on the other hand, appliesoften non-aeroelastic tools dedicated to a detailed descrip-tion of all relevant foundation structure aspects, such asnon-linear soil–structure interactions, while especially theRNA is modelled in a simplified manner.
3. Existing load calculation methods
Expansion of foundation loads from dynamic interfaceresponses requires methodologies of high accuracy suchthat the resulting design loads in all parts of the founda-tion are captured adequately. In case of bottom-mounted,space frame structures such as jackets, this requires a high-precision method in order to capture the dynamics correctlyin the design loads. For example, the braces of jacket foun-dations for OWT can be prone to local dynamics as shown,for example, by Boker (2010) and Kjetsa and Saaghus(2010). This local dynamic behaviour of the braces influ-
ences the resulting stresses significantly, particularly in theneighbouring connection to the jacket legs.
This section provides a brief summary of typical loadcalculation methods for the load expansion step in the de-sign of bottom-mounted, space frame OWT foundations,namely the deformation-controlled approach and the force-controlled approach. It should be noted that both approachesare also applicable for monopile-type foundations.
The same first step is required for the force- anddeformation-controlled approaches within the overall loadcalculation process between the FD and WTM. This firststep is the generation of a dynamically equivalent founda-tion model and corresponding hydrodynamic loads by theFD. Foundation model and loads are subsequently appliedwithin the integrated OWT model of the WTM, in accor-dance to Figures 2 and 3. The reader is referred to Van derValk and Voormeeren (2012) for a more detailed descrip-tion and evaluation of selected modelling approaches in thisfirst step.
It should be noted that certain development activi-ties towards fully integrated design tools, shared by theWTM and FD, with detailed subsystem models on all lev-els of the load calculation process exist (Passon 2008).However, large-scale application of such tools and modelsfor the design of OWT is not expected in the short-termfuture.
Dow
nloa
ded
by [
Uni
vers
ity o
f N
ew M
exic
o] a
t 03:
41 0
1 O
ctob
er 2
014

Ships and Offshore Structures 437
Figure 4. Models and loading configurations for the deformation-controlled approach.
3.1. Deformation-controlled approach
The deformation-controlled approach, subsequently de-noted as ‘Def-Ctrl’, as described by Seidel et al. (2005),is indicated in Figure 4. Dynamic responses in terms ofinterface deformation time series for all 6 degrees of free-dom (DOFs), that is, ux to φz, are generated by aeroelasticsimulations of the integrated OWT model correspondingto step 2 in Figure 2. These response time series are thenapplied as deformation boundary conditions at the inter-face together with the hydrodynamic loads acting directlyon the foundation in a dynamic analysis of the foundationstructure without the superstructure.
3.2. Force-controlled approach
The force-controlled approach, subsequently denoted as‘For-Ctrl’, as described by Van der Valk and Voormeeren(2012), is indicated in Figure 5. Dynamic responses interms of interface load time series for all six load com-ponents, that is, Fx to Mz, are generated by aeroelasticsimulations of the integrated OWT model correspondingto step 2 in Figure 2. These response time series are thenapplied as external loads at the interface together with thehydrodynamic loads acting directly on the foundation in adynamic analysis of the foundation structure without thesuperstructure.
4. Foundation load calculation based on inversedynamics
This section presents an alternative calculation methodbased on inverse dynamics for the expansion of foundationloads according to Figure 2. Starting from the convolution
integral method, the inverse dynamics approach is devel-oped as a set of coupled, inverse discrete impulse responsefunctions (DIRFs). For further details, the reader is referredto Bayo et al. (1988) and Bayo and Moulin (1989).
4.1. Convolution integral method
Responses of linear, time-invariant systems to general dy-namic excitations can be derived on the basis of the convo-lution integral method, also known as the Duhamel integralmethod. Theory and practical application of this method iswell covered in many articles and textbooks, for example,Meirovitch (1980).
The basic idea is to establish an impulse response func-tion (IRF) to capture the system characteristics by relating aunit impulse excitation to the dynamic system response. Ageneral dynamic excitation can be regarded as a sequenceof impulses. The individual responses to these impulses aredescribed by the IRF scaled by the actual magnitude of theimpulse. The total response to the dynamic excitation atany given time t is then obtained by superposition of theindividual scaled IRF at time τ prior to time t.
The general form of this approach is described by theintegral in Equation (1),
u (t) =∫ t
0f (τ )h(t − τ )dτ, (1)
with u(t) = magnitude of dynamic response to excitation fat time t, f (t) = magnitude of excitation at time t and h(t) =IRF to a unit impulse at time t.
Dow
nloa
ded
by [
Uni
vers
ity o
f N
ew M
exic
o] a
t 03:
41 0
1 O
ctob
er 2
014

438 P. Passon and K. Branner
Figure 5. Models and loading configurations for the force-controlled approach.
A discretised form of the integral expression from Equa-tion (1) is typically applied for computer-aided dynamiccalculations of complex structural systems,
u (ti) =ti∑
τ=0
f (τ )h (ti − τ ) . (2)
4.2. Convolution integral-based algorithm fordynamic response calculations
This section introduces an algorithm for the discretisedconvolution integral in Equation (2) in a slightly differentform for single degree of freedom (SDOF) systems, asshown in Figure 6.
The DIRF-based approach to solve the dynamics ofSDOF systems is based on the following three steps.
(1) Generation and sampling of the IRFThe continuous IRF h(t) is calculated in a linear dy-namic analysis for the considered SDOF system. Here,h(t) represents the load at the fixation point of the modelshown in Figure 6. The underlying unit impulse is es-tablished by a ramped load that increases from zero
Figure 6. Example SDOF system.
to unity within one time step of the size dt and sub-sequently decreases down to zero within the next timestep. Subsequently, the calculated IRF is discretised andsampled in an array h(ti) for all ti = 0. . .N time steps,with N = (T/dt) and T being the total length of the con-sidered time series. The first element h(0) correspondsto the initial time step at t = 0 s, which is neglectedfor further use of h(ti). The example unit impulses, IRFand DIRF, are shown in Figure 7.
(2) Discretisation and sampling of the excitationsThe excitations are discretised and sampled similar tothe DIRF. As indicated in Figure 8, the excitation func-tion in terms of forces f (t) is sampled in the array f (ti)using time step sizes of dt. Furthermore, an array withchange in excitation force is established as �f (ti) =f (ti)−f (ti−1), with �f (0) = 0. For time T of the ex-citation function, the arrays f (ti) and �f (ti) consist ofi = 0. . .N elements, with N = (T/dt). For convenience,T and the time step dt are assumed to be equal for thediscretisation of the excitation function f (t) and IRFh(t).
(3) Calculation of responses u(ti) for the excitations f (ti)The elements of the response time series u(ti) to theexcitations f (ti) are calculated successively on the basisof the established DIRF h(ti) and excitation differences�f (ti), following the algorithm in Equation (3),
u (0) = f (0)u (1) = u (0) + �f (1) · h(1)
u (2) = u (1) + �f (1) · h (2) + �f (2) · h(1)...
u (ti) = u (ti − 1) +i∑
j=1(�f (tj ) · h(ti+1 − tj )).
(3)
Dow
nloa
ded
by [
Uni
vers
ity o
f N
ew M
exic
o] a
t 03:
41 0
1 O
ctob
er 2
014

Ships and Offshore Structures 439
Figure 7. Unit load impulse together with IRF (left) and DIRF (right).
Generally, the response can be calculated for variousproperties, such as deflections or loads, dependent on theDIRF. Here, u(ti) can, for example, represent the load re-sponse at the fixation of the system shown in Figure 6. Initialconditions at t = 0 s are based on a static equilibrium withu0 = u(0) = f (0), that is, velocity and acceleration are zero.
4.3. Development of an inverse dynamicsalgorithm
So far, the discrete form of the convolution integral methodhas been introduced as a possibility to calculate responsesto general dynamic excitations for linear, time-invariantSDOF systems. This section presents an algorithm for the
Figure 8. A load function f (t) (upper) is discretised and sampled for time step sizes dt in the vector f (ti) (centre) and further sampled forload differences per time step in the vector �f (ti).
Dow
nloa
ded
by [
Uni
vers
ity o
f N
ew M
exic
o] a
t 03:
41 0
1 O
ctob
er 2
014

440 P. Passon and K. Branner
application of the method the other way around, that is,to generate an excitation signal for a specific dynamic re-sponse of a given linear, time-invariant system. For thispurpose, the discrete form of the convolution integral asestablished in Section 4.2 is reformulated into an algo-rithm that allows solving for excitations based on responseswhile keeping the DIRF. The established algorithm is sub-sequently extended to arbitrary multi-degree of freedom(MDOF) systems.
4.3.1. Inverse dynamics for SDOF systems
A DIRF-based algorithm to solve dynamic problems for agiven linear SDOF system and an arbitrary excitation timeseries has been provided in Equation (3). These equationscan be transformed such that it is possible to calculate thecorresponding excitation time series f (ti) via the excitationdifferences �f (ti) for a specific dynamic response time se-ries u(ti) and a given SDOF system characterised by itsDIRF h(ti). Again, the initial conditions at t = 0 s are basedon a static equilibrium with f 0 = f (0) = u(0). Equation (4)introduces the inverse dynamics algorithm to solve succes-sively for the excitation differences �f (ti) for all time stepsti = 1. . .N , which are subsequently used to establish thecorresponding excitation time series f (ti),
f (0) = u(0)
�f (1) = [u(1) − u(0)]
h(1)→ f (1) = f (0) + �f (1)
�f (2) = [u(2) − u(1)] − �f (1) · h(2)
h(1)→ f (2) = f (1) + �f (2)
...
�f (ti ) = [u (ti ) − u (ti − 1)] − ∑i−1j=1(�f (tj ) · h(ti+1 − tj ))
h(1)
→ f (ti ) = f (ti−1) + �f (ti ) . (4)
4.3.2. Inverse dynamics for MDOF systems
The inverse dynamics approach in Equation (4) is now ex-tended to MDOF systems. However, in order to limit thecomplexity of the problem, just 6 DOFs are considered.These 6 DOFs represent three perpendicular translationsand three perpendicular rotations in a Cartesian x-, y- andz-coordinate system with the corresponding forces and mo-ments Fx, Fy, Fz, Mx, My and Mz. Excitations are nowrepresented by time series of six load components f (ti) =[fx(ti) fy(ti) fz(ti) mx(ti) my(ti) mz(ti)]T and, analogously, theload responses are represented by f (ti) = [Fx(ti) Fy(ti) Fz(ti)Mx(ti) My(ti) Mz(ti)]T. Each component in f and F is a timeseries of ti = 0. . .N elements, with N = T/dt according to
the length of the time series T and the selected time stepsize dt.
The DIRF is now established by the subsequent appli-cation of individual unit impulse loads fx(unit), fy(unit), fz(unit),mx(unit), my(unit) and mz(unit) and calculation of the corre-sponding system responses in terms of all six load com-ponents per unit impulse load. The individual time seriesof load component responses to the individual unit impulseloads are stored in a compact 6×6 DIRF matrix per timestep i and the corresponding time ti as
H (ti) =
⎡⎢⎣
hfx(unit),Fx· · · hfx(unit),Mz
.... . .
...hmz(unit),Fx
· · · hmz(unit),Mz
⎤⎥⎦ =
⎡⎢⎣
h1,1 · · · h1,6...
. . ....
h6,1 · · · h6,6
⎤⎥⎦
= hk,n for
{k = 1..6n = 1..6
For example, hfy(unit),Mz in H(ti) represents the load com-ponent Mz of the system response to the unit impulse loadfy(unit). For convenience, an index notation is used for theentries in the DIRF matrix, expressing them as hk,n, with
k = 1. . .6 for the unit impulse loads fx(unit), fy(unit), fz(unit),mx(unit), my(unit) and mz(unit) and
n = 1. . .6 for response components Fx, Fy, Fz, Mx, My andMz to the unit impulse load.
Substitution of the scalar terms in Equation (4) by thevectors of responses f (ti) and difference in excitation loads�f (ti) = [�fx(ti) �fy(ti) �fz(ti) �mx(ti) �my(ti) �mz(ti)]T
as well as by the matrix of the DIRF H(ti) leads to the in-verse dynamics algorithm for MDOF systems summarisedin Equation (5). Again, this allows to solve successivelyfor the differences �f (ti) in the excitation vector for alltime steps i = 1. . .N , which in turn allows to subsequentlycalculate the corresponding excitation vector f (ti) for timestep i. The initial conditions at t = 0 s are based on a staticequilibrium with f 0 = f (0) = F(0).
Note that H(1)−1 represents the inverse of the matrixformed by the elements hk,n at time step ti = 1 correspondingto the peak of the individual unit impulse loads and that thisinverse matrix needs to be derived only once,
f (0) = F (0)
�f (1) = [F (1) − F (0)] · H (1)−1 → f (1) = f (0) + �f (1)
�f (2) = ([F (2) − F (1)] − �f (1) · H (2)) · H (1)−1
→ f (2) = f (1) + �f (2)
...
�f (ti ) =⎛⎝[F (ti ) − F (ti − 1)] −
i−1∑j=1
[�f (tj ) · h(ti + 1 − tj )]
⎞⎠ · H (1)−1
→ f (ti ) = f (ti − 1) + �f (ti ) . (5)
Dow
nloa
ded
by [
Uni
vers
ity o
f N
ew M
exic
o] a
t 03:
41 0
1 O
ctob
er 2
014

Ships and Offshore Structures 441
Figure 9. Four subsequent steps for load calculations based on inverse dynamics. This figure is available in colour online.
The inverse dynamics algorithm in Equation (5) caneasily be implemented for computer-aided applications al-lowing for efficient calculations of excitation time series forgiven responses and MDOF systems characterised by theDIRF H(ti).
4.4. Inverse dynamics approach for loadcalculations of OWT foundations
The steps of the inverse dynamics approach, subsequentlydenoted as ‘Inv-Dyn’, for foundation load expansion areindicated in Figure 9. A dynamically equivalent foundationtogether with hydrodynamic loads is extracted from thedetailed FD model in step 1 required for the aeroelastic
simulations by the WTM. This step fully corresponds tothe first step in the ‘Def-Ctrl’ and ‘For-Ctrl’ approachesintroduced in Section 3. Furthermore, this step is used togenerate isolated hydrodynamic interface responses in a dy-namic analysis of the FD model as required in step 3. Theequivalent foundation model and hydrodynamic loads areincluded in the aeroelastic OWT model by the WTM in step2 resulting in an integrated OWT model and simultaneousaerodynamic and hydrodynamic excitations. This aeroe-lastic model is then subjected to a dynamic analysis fromwhich response time series for all six load components, thatis, Fx to Mz, are extracted at the interface. These responsetime series contain both the aerodynamic response as wellas the dynamic part of the hydrodynamic response and are
Dow
nloa
ded
by [
Uni
vers
ity o
f N
ew M
exic
o] a
t 03:
41 0
1 O
ctob
er 2
014

442 P. Passon and K. Branner
Figure 10. OWT model in ROSAP. This figure is available incolour online.
subjected to the inverse dynamics algorithm in step 3. Forthat purpose, the inverse dynamics algorithm from Equation(5) is applied using the DIRF for all six load componentsat the interface of the FD model. However, the hydrody-namic interface responses as generated in step 1 have to besubtracted from the interface responses generated in step2, prior to application of the inverse dynamics algorithm.This is required in order to avoid a double application ofthe dynamic part of the hydrodynamic response from thesuperstructure in step 4 as the generated, artificial interfaceexcitations are applied simultaneously with the hydrody-namic excitations on the foundation structure in a dynamicanalysis. The FD model in step 4 is the same as in steps1 and 3, consisting of a detailed foundation model and asimplified superstructure configuration. Generation of theartificial interface excitation time series from interface re-sponses obtained in steps 1 and 2 introduces an additional,intermediate step compared to the ‘Def-Ctrl’ and ‘For-Ctrl’approach.
It should be noted that the superstructure could be re-moved in the intermediate step of the inverse dynamics aswell as in the subsequent dynamic load calculation. Thiswould make the inverse dynamics approach for generationof the interface excitations unnecessary as the resulting in-terface excitations are identical to the interface responses
from step 2 since the interface forms a free end. In thisspecial case, the inverse dynamics approach is reduced tothe ‘For-Ctrl’ approach. Analogously, the inverse dynamicsapproach would be reduced to the ‘Def-Ctrl’ approach incase of deformation-based DIRFs when omitting the super-structure.
5. Load calculation method comparison
This section presents an assessment of all three introducedload calculation methods. For that purpose, a representa-tive fatigue scenario from the perspective of an FD is intro-duced in Section 5.1 by generic met-ocean conditions anda generic OWT model. Ideally, the load calculation meth-ods should be evaluated against results obtained by a fullyintegrated design tool modelling the OWT in accordancewith Figure 1. However, since such a tool is not available,the results from the individual load calculation methods arecompared with each other, establishing a sufficient level ofconfidence in case of good agreement.
Dynamic interface response time series are generatedby aeroelastic simulations with RamFlex1 for a selection ofrepresentative fatigue load cases with simultaneous aero-dynamic and hydrodynamic loading conditions. The OWTmodel in RamFlex consists of a detailed superstructuremodel and a dynamically equivalent representation of thefoundation. The interface response time series together withthe direct hydrodynamic loads on the foundation structureare subsequently applied for calculation of all responses inthe foundation structure on the basis of the different loadcalculation methods introduced in the previous sections,that is, the ‘Def-Ctrl’, ‘For-Ctrl’ and ‘Inv-Dyn’ approaches.For that purpose, a detailed model of the foundation andhydrodynamic excitations are established in the simulationplatform ROSAP2 (2012). In case of the ‘Inv-Dyn’ ap-proach, the detailed foundation model is complemented bya simplified representation of the superstructure consistingof a detailed tower model and a mass equivalent represen-tation of the RNA.
Selected long-term and short-term fatigue results in thefoundation structure are compared in Section 5.2 for theindividual load calculation methods. These results are thendiscussed together with additional aspects for the evaluationof all load calculation methods in Section 5.3.
5.1. OWT model and generic site conditions
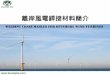
The well-known generic NREL 5MW wind turbine(Jonkman et al. 2007) in combination with a piled jacketfoundation and tubular steel tower is used for the presentinvestigations. The piled jacket foundation consists of fourlegs and four bays of x-bracings, as indicated in Figure 10.Table 1 summarises the main structural parameters.
The generic site is established with medium stiff soil anda water depth of 31 m. Met-ocean conditions for the long-
Dow
nloa
ded
by [
Uni
vers
ity o
f N
ew M
exic
o] a
t 03:
41 0
1 O
ctob
er 2
014

Ships and Offshore Structures 443
Table 1. OWT model parameter.
Mass of RNA (ton) 350Hub height elevation (m) 100.0Conical tower parametersTower top diameter (mm) 4000Tower bottom diameter (mm) 5500(Constant) wall thickness (mm) 38Tower length (m) 72Jacket and pile parametersTop base width (m) 11.0Bottom base width (m) 20.0Leg diameter (mm) 1000Leg wall thickness (mm) 30–50Brace diameter (mm) 450–630Brace wall thickness (mm) 18–35Pile diameter (mm) 1829Pile wall thickness (mm) 25–50Pile penetration (m) 45.0
term fatigue scenario consist of aligned wind and wave con-ditions for 12 directions in accordance to the wind–waverose in Figure 11. Wind conditions on hub height level aredescribed by an omnidirectional Weibull distribution witha scale parameter of A = 11.19 m/s and a form factor of k =2.35. Turbulences are generated in accordance to the Up-Wind site conditions, as described by Fischer et al. (2010).
Table 2 summarises the combined omnidirectionalwind, wave and current parameters for all simulated loadcases. The long-term fatigue setup includes only normalpower production conditions (wind speed bins 5–23 m/sin Table 2) and idling conditions outside the power pro-duction range of the turbine (wind speed bins 3.5 m/s and30 m/s in Table 2). For simplicity, each load combinationhas been simulated with only one random seed for genera-tion of turbulences and irregular waves, resulting in a totalof 144 load combinations (short-term fatigue cases). Proba-
Figure 11. Wind–wave rose for the generic site. This figure isavailable in colour online.
bilities for the individual short-term fatigue cases have beenassigned in accordance to the aforementioned omnidirec-tional Weibull distribution and aligned wind–wave rose.
5.2. Comparison of fatigue results from all loadcalculation methods
In this section, fatigue results obtained by the ‘For-Ctrl’,‘Def-Ctrl’ and ‘Inv-Dyn’ load calculation methods are com-pared. Long-term fatigue results are compared on the basisof damages in selected tubular joints and short-term fa-tigue results are compared on the basis of load and defor-mation time series at selected locations within the jacketstructure.
Table 2. Correlation of wind, wave and current parameters.
Mean wind speed onhub height
Turbulenceintensity
Significant waveheight Peak period
Reference currentspeed (wind induced)
Omnidirectionalprobability
vhub I Hs Tp vc ,wind,ref p(m/s) (%) (m) (s) (m/s) (%)
3.5 21.7 0.60 4.20 0.04 8.5305 18.7 0.91 4.88 0.06 12.1127 16.7 1.25 5.43 0.08 15.8869 15.6 1.46 5.61 0.10 17.07611 14.8 1.81 5.83 0.12 15.62813 14.4 2.18 6.19 0.14 12.37715 14.0 2.61 6.55 0.16 8.53917 13.7 3.06 7.17 0.19 5.14719 13.5 3.61 7.66 0.21 2.71021 13.3 4.18 7.98 0.23 1.24723 13.2 4.78 8.44 0.25 0.50130 12.8 5.63 9.07 0.33 0.246
Dow
nloa
ded
by [
Uni
vers
ity o
f N
ew M
exic
o] a
t 03:
41 0
1 O
ctob
er 2
014

444 P. Passon and K. Branner
Figure 12. Nodes and elements on one flat face of the jacket (upper) and example denotation of one tubular joint (lower).
5.2.1. Long-term fatigue results
The long-term fatigue assessment of the individual load cal-culation methods is performed by comparison of minimumfatigue lives at different locations on the chord and braceside of all tubular joints exemplarily for one side of the
jacket. All 144 directional fatigue load cases weighted withtheir respective probabilities of occurrence are taken intoaccount for the calculation of fatigue lives. Stress concen-tration factors for the tubular joints are determined accord-ing to Efthymiou (1988). S–N curves for the calculation of
Dow
nloa
ded
by [
Uni
vers
ity o
f N
ew M
exic
o] a
t 03:
41 0
1 O
ctob
er 2
014

Ships and Offshore Structures 445
Figure 13. Normalised fatigue lives for all tubular joints on one flat-face side of the jacket. This figure is available in colour online.
fatigue damages in all tubular joints are taken from DNV-OS-J101 (2011). The naming of tubular joints and locationof the extracted minimum fatigue lives is chosen in accor-dance to the following convention: Node – Chord element1 – Chord element 2 – Brace.
Node and element names for one flat side of thejacket are shown together with an example for thedenotation of joint ‘20A0Q0-AQ13L-AQ20L-20AAT’ inFigure 12. Here, the minimum fatigue lives are extractedat the connection of brace element 20AAT to the chord
elements AQ13L and AQ20L in node 20A0Q0. It shouldbe noted that each element in Figure 12 is furthermorecomposed from four sub-elements. However, this additionaldiscretisation is not shown for a more convenient visuali-sation.
Figure 13 shows fatigue lives for the chord and braceside of all tubular joints for one side of the jacket as calcu-lated by the individual load calculation methods. For con-venience, the individual joint fatigue lives have been nor-malised to unity with respect to the ‘For-Ctrl’ results. The
Dow
nloa
ded
by [
Uni
vers
ity o
f N
ew M
exic
o] a
t 03:
41 0
1 O
ctob
er 2
014

446 P. Passon and K. Branner
Figure 14. Location of the assessed load and deformation sensors. This figure is available in colour online.
agreement is considered very well as differences are lessthan 0.5% for all tubular joints.
5.2.2. Short-term fatigue results
One exemplary load combination from the long-term fa-tigue load setup has been selected as a representative short-term fatigue load case for further assessment. The se-lected load case represents normal power production at13 m/s wind speed with wind and waves coming fromeast–southeast. A total of 60 distributed load and defor-mation response sensors throughout the jacket structurehave been assessed in terms of time series, power spec-tral densities and statistics for the individual load calcula-tion methods. The sensor locations (each comprising of sixdeformations and six load components) together with thewind–wave direction in relation to the foundation orienta-tion are indicated in Figure 14.
The observed agreement between the individual loadcalculation methods is very good for all 60 sensors. How-ever, the results presented here are limited to the followingtwo sensors:
(1) axial load for the submerged brace element 20AAT atnode 20A0Q0;
(2) out-of-plane deflection in submerged node 25A0Q0.
Figures 15 and 16 show the time series, power spectraldensities and statistics for the two sensors as obtained by theindividual load calculation methods. It should be noted thatthe presented power spectral densities and statistics reflectthe whole 600 s duration of the corresponding time series,while only 40 s are extracted for the shown time series in or-der to allow for a more convenient illustration. Furthermore,the relevant natural frequencies and exciting rotational fre-
quencies are shown in the power spectral density plots. Adistinct peak around 0.9 Hz can be observed in both powerspectral density distributions. This peak is assumed to re-sult from interactions between the first blade edge modeand the rotational frequency 1P, resulting in backward rotorwhirl. The reader is referred to Petersen et al. (1998) for amore detailed description of this phenomenon.
5.3. Evaluation of the load calculation methods
This section evaluates the three load calculation methodsunder consideration of different aspects, which are practicalconstraints, accuracy and efficiency.
5.3.1. Practical constraints and flexibility
No particular practical constraints were present for the fa-tigue design example in this article. However, this may notbe the case in commercial applications for OWT foundationdesigns, as typically only a narrow selection of appropri-ate, dedicated design tools exist. The ‘Def-Ctrl’ approach,for example, requires application of time-varying defor-mation boundary conditions as excitations. While this istypically a supported feature in general purpose tools suchas ANSYS R©, it might not be a supported approach in allspecialised design tools dedicated to the design of OWTfoundations. However, both the ‘For-Ctrl’ and ‘Inv-Dyn’approaches can be applied in all design tools known to theauthors. Furthermore, limited information in terms of inter-face responses might be available in particular situations,that is, either loads or deformations; while the ‘For-Ctrl’approach depends on available responses in terms of loads,the ‘Def-Ctrl’ approach is limited to scenarios with avail-able deformation responses. Here, the ‘Inv-Dyn’ approachis considered superior in terms of flexibility as it can be
Dow
nloa
ded
by [
Uni
vers
ity o
f N
ew M
exic
o] a
t 03:
41 0
1 O
ctob
er 2
014

Ships and Offshore Structures 447
Figure 15. Comparison of axial load response in element 20AAT at node 20A0Q0 for the individual load calculation methods. Timeseries (upper left), statistics (upper right) and power spectral densities (lower). This figure is available in colour online.
applied for both types of responses. Furthermore, the ‘Inv-Dyn’ approach does allow for a transformation betweenload and deformation responses, which is useful, for exam-ple, in a situation with available deformation responses buta limitation on the application of load excitations in the cho-sen design tool. For that purpose, the DIRF H(ti) in Section4.3.2 has simply to be established for a load impulse and
deformation response in order to generate load excitationtime series from given deformation response time series.
5.3.2. Accuracy
Confidence in the accuracy of all three load calcula-tion methods could be established on the basis of the
Figure 16. Comparison of out-of-plane deflection response in node 25AA00 for the individual load calculation methods. Time series(upper left), statistics (upper right) and power spectral densities (lower). This figure is available in colour online.
Dow
nloa
ded
by [
Uni
vers
ity o
f N
ew M
exic
o] a
t 03:
41 0
1 O
ctob
er 2
014

448 P. Passon and K. Branner
exemplary design scenario as almost identical results havebeen achieved. It is therefore concluded that all threeload calculation methods are equally applicable with re-spect to accuracy. However, additional validation studiesfor all load calculation methods against results obtainedfrom a fully integrated model with detailed subsystem mod-els are recommended in order to conclude on the overallaccuracy.
5.3.3. Efficiency
Both the ‘For-Ctrl’ and ‘Def-Ctrl’ approaches are morefavourable than the ‘Inv-Dyn’ approach in terms of ef-ficiency. This is due to the additional steps required forthe ‘Inv-Dyn’ approach, that is, generation of the hydro-dynamic interface responses and generation of the equiv-alent interface excitations. No particular advantages ordisadvantages on the efficiency are present for the ‘For-Ctrl’ and ‘Def-Ctrl’ approaches when compared to eachother.
5.3.4. Recommendations for selection of the optimalload calculation method
The individual load calculation methods introduce advan-tages and disadvantages on different aspects. As these as-pects might have higher or lower relevance dependent onthe particular situation and requirements, it is not possibleto provide a general recommendation towards applicationof one method in preference to another method. Instead, it isrecommended to assess the advantages and disadvantagesof the individual methods in context of the particular taskin order to select the optimal method.
6. Conclusions
A summary and assessment of load calculation methodsfor the design of bottom-mounted, space frame-type OWTfoundations has been presented in this article. In this con-text, a novel approach based on inverse dynamics has beendeveloped and compared to two alternative approaches, thatis, force controlled and deformation controlled. This is donefor an exemplarily fatigue design scenario from the per-spective of an FD. Ideally, results obtained by the threeload calculation methods should be verified on the basis ofa fully integrated model. However, such a model has notbeen available for the investigations presented in this arti-cle. Confidence in the three methods is instead generatedby the fact that identical long-term and short-term fatigueresults are obtained by all methods. Despite the identicalresults for all methods, the novel inverse dynamics-basedapproach requires additional calculation steps and might beconsidered the least efficient approach. On the other hand,the novel approach grants a higher degree of flexibility com-pared to both other approaches as it can even be applied in
situations with given deformation responses in a tool thatallows only for application of loads in dynamic analysesas well as the other way around. This flexibility and result-ing applicability for all design tools and types of dynamicresponse data is a considerable advantage of the inversedynamics-based approach over the force- and deformation-controlled approaches despite the additional calculationstep. Nevertheless, a conclusive recommendation on oneparticular method should not be provided. Instead, it isrecommended to assess their applicability and individualbenefits in the context of the particular application pur-pose and under consideration of the aspects highlighted inSection 5.3.
In addition, it is expected that inverse dynamicsfor the design of OWT subsystems has potentials evenbeyond the application of calculating foundation loads. Itis therefore highly recommended to assess the potentialsof the inverse dynamics method in a broader context forOWT design purposes, such as controller optimisation forload mitigation purposes.
Notes1. RAMBOLLs version of the FLEX5 code from Øye (1999a,
1999b).2. RAMBOLL Offshore Structure Analysis Package, a finite
element-based in-house software package of RAMBOLL foroffshore structures.
ReferencesBayo E, Moulin H. 1989. An efficient computation of the inverse
dynamics of flexible manipulators in the time domain. Con-ference proceedings of the IEEE Conference on Robotics andAutomation; May 1989; Scottsdale (AZ).
Bayo E, Movaghar R, Medus M. 1988. Inverse dynamics of asingle-link flexible robot. Analytical and experimental results.Int J Robot Autom. 3:150–157.
Boker C. 2010. Load simulation and local dynamics of supportstructures for offshore wind turbines [dissertation]. [Hannover(Germany)]: University of Hannover; February 2010.
DNV-OS-J101. 2011. Design of offshore wind turbine structures.Offshore Standard Det Norske Veritas AS. Available from:http://www.dnv.com.
Efthymiou M. 1988. Development of SCF formulae and gener-alised influence functions for use in fatigue analysis. Confer-ence proceedings of the Offshore Tubular Joints Conference(OTJ ‘88); 1988; London (UK).
Fischer T, de Vries W, Schmidt B. 2010. Upwind design basis.Stuttgart (Germany). Available from: http://www.upwind.eu.
Jonkman J, Butterfield S, Musial W, Scott G. 2007. Definition ofa 5MW reference wind turbine for offshore systems develop-ment. Golden (CO): National Renewable Energy Laboratory.
Kjetsa A, Saaghus LJ. 2010. Local dynamics of offshore wind tur-bine jacket sub-structures [master’s thesis]. [Trondheim (Nor-way)]: Norwegian University of Science and Technology; June2010.
Meirovitch L. 1980. Computational methods in structural dynam-ics. Alphen aan den Rijn, The Netherlands: Sijthoff NoordhoffInternational Publishers.
Øye S. 1999a. FLEX5, short description for FLEX4 users. Copen-hagen (Denmark): Technical University of Denmark.
Dow
nloa
ded
by [
Uni
vers
ity o
f N
ew M
exic
o] a
t 03:
41 0
1 O
ctob
er 2
014

Ships and Offshore Structures 449
Øye S. 1999b. FLEX5 manual. Copenhagen (Denmark): TechnicalUniversity of Denmark.
Passon P. 2008. Design tool for multi-member bottom-mountedsupport structures, UpWind deliverable D4.3.2. Stuttgart(Germany). Available from: http://www.upwind.eu.
Petersen JT, Thomsen K, Madsen HA. 1998. Local blade whirland global rotor whirl interaction. Roskilde (Denmark): RisøNational Laboratory.
ROSAP. 2012. Ramboll offshore structural analysis programpackage, version 4.46. Copenhagen (Denmark).
Seidel M, von Mutius M, Rix P, Steudel D. 2005. Integratedanalysis of wind and wave loading for complex support struc-tures of Offshore Wind Turbines. Conference proceedingsof Copenhagen Offshore Wind 2005; October 2005; Copen-hagen (Denmark).
Van der Valk PLC, Voormeeren S. 2012. An overview of modellingapproaches for complex offshore wind turbine support struc-tures. Conference proceedings of ISMA2012 InternationalConference on Noise and Vibration Engineering; September2012; Leuven (Belgium).
Dow
nloa
ded
by [
Uni
vers
ity o
f N
ew M
exic
o] a
t 03:
41 0
1 O
ctob
er 2
014