Embed Size (px)
Citation preview

SACLANTCEN ReportSR-44
0
LJ
SACLANT ASW
RESEARCH CENTRE
REPORTQ.©
0A RESUME OF DETERMINISTIC TIME-VARYING LINEAR SYSTEM THEORY
WlTII APPLICATIOCN TO ACTIVE SONAR SIGNAL PROCESSING PROBLEMS
by
LEWIS MEIER
FEB 1 3 1981
A
15 DECEMBER 1980
llu dncxntt a~iboe! pplive.dfor I-ubhi~r1an, and suo; its
NORIH
AILANTICT r LA SPEZIA. ITALYTR(ATY
ORGANIZATION
This document Is unclassified. The information it contains is published subject to the conditions of thelegend printed on the inside cover. Short quotations from It may be made in other publications if credit isgiven to the author(s). Except for working copies for research purposes or for use in official NATOpublications, reproduction requires the authorization of the Director of SACLANTCEN.
'N A19

This document is released to a NATO Government 4at the direction of the SACLANTCL.N s-ubject to thefollowing conditions:
I The recipient NATO Government agrees to oreits best endeavours to ensure that the informationherein disclosed, whether or not it bear, a securityclass,fication, is not dealt with in any manner (a)contrary to the intent of the provisions of the Charterof the Centre, or (b) prejudicial to the rights of tneowner thereof to obtain patent, copyr.ght, or otherlike stautory protection therefor.
2 If the technical nfornmation was originallyreleased to the Centre by a NATO Government subjectto restrictionn clearly mared on this document therecipient NATO Government agrees to use its beatendeavours to abide by the terms of the restrictionsso imposed by the releasing Government.
PI
% -V I

SACLANTCEN REPORT SR-44
NORTH ATLANTIC TREATY ORGANIZATION
SACLANT ASW Research CentreViale San Bartolomeo 400, 1-19026 San Bartolomeo (SP), Italy
national 0187 560940international + 39 187 560940
telex: 271148 SACENT I
A RESUME OF DETERMINISTIC TIME-VARYING LINEAR SYSTEM THEORY
WITH APPLICATION TO ACTIVE SONAR SIGNAL PROCESSING PROBLEMS,
by
/ 'Lewiskeier
15 December 1980
This report has been prepared as part of Project 02.
APPR D FOR DISTRIBUTION
.W. LY HLLL1o

SACLANTCEN SR-44
TABLE OF CONTENTS
Page
ABSTRACT 1
INTRODUCTION 3
1 THE THEORY 51.1 The cross-ambiguity function 51.2 The spreading function 61.3 The fundamental relationship 71.4 Some approximate relationships 8
2 SOME APPLICATIONS OF THE THEORY 112.1 The ambiguity functions of a linear FM pulse 112.2 Factoring propagation delays into the target
spreading function 172.3 The bistatic spreading function of a moving,
turning line target 182.4 The matched filter output for the bistatic echo
from a linear FM pulse for a moving, turningline target in a non-dispersive medium 21
CONCLUSIONS 23
REFERENCES 25APPENDIX A - DERIVATION OF THE RELATIONSHIP BETWEEN THE
IMPULSE RESPONSE AND THE SPREADING FUNCTIONS 27
APPENDIX B - DERIVATION OF THE FREQUENCY-SHIFT VERSION OFTHE FUNDAMENTAL RELATIONSHIPS 29
APPENDIX C - DERIVATION OF THE FREQUENCY STRETCH VERSIONOF THE FUNDAMENTAL RELATIONSHIPS 33
APPENDIX D - DERIVATION OF THE APPROXIMATE RELATIONSHIPS 37
APPENPIX E - DERIVATION OF APPROXIMATE FORMS OF THE L!NEAR FMDOPPLER AMBIGUITY FUNCTION 39
APPENDIX F - DERIVATION OF' THE BISTATIC DOPPLER SPREADINGFUNCTION OF A MOVING, TURNING LINE TARGET 47
APPEJDIX G - DERIVATION OF THE MATCHED FILTER OUTPUT FOR THEBISTATIC ECHO FROM A MOVING, TURNING TARGET INA NON-DISPERSIVE MEDIUM 53'1

SACLANTCEN SR-44
TABLE OF CONTENTS (Cont'd)
List of Figures
Pace
1. Simplified block diagram of a single beam of an activesonar system 5
2. Relationship between the input and input cross-ambiguityfunctions and the spreading function of a time-varyinglinear system 7
3. The spreading function of two systems in tandem in termsof their individual sDreading functions 7
M M4. maxly (zY; Xv) - ¥FM(z'y; xo)l vs y/O.02 v : (a-l)/0.02
zfor various x/v : BT and x 15
M VS Z FOR X = 1.3 AND VARIOUS Y 15
I 6. 1-y M2 VS Z FOR X = 2.6 AND VARIOUS Y 16
7, yM VS Z FOR X = 5.2 AND VARIOUS Y 16
8. Relationships between two versions of a simplified activesonar model 17
9. Bistatic geometry 19
i'I
I, ii

IT SACLANTCEN SR-44
A RESUME OF DETERMINISTC TIME-VARYING LINEAR SYSTEM THEORY
WITH APPLICATION TO ACTIVE SONAR SIGNAL PROCESSING PROBLEMS
by
Lewis Meier
ABSTRACT
Brief sumnmaries are given of time-varying linear system theory in both theconvention frequency-shift version and the novel frequency-shift version.The latter version of the theory is utilized to obtain the matched filteroutput for the bistatic echo from a moving, turning line target for alinear FM pulse in a non-dispersive medium.
1
't1

SACLANTCEN SR-44
INTRODUCTION
The major concern of this report is with a sonar return processed in thestandard manner with a beam former (not considered herein) and a bank ofmatched filters, where the modification of the transmitted signal by themedium and the target can be represented by a time-varying linear system.Two transmitted signals are of interest: the CW pulse, which has unitytime/bandwidth product and the FM pulse, which has a time/bandwidth productmuch greater than unity. Correspondingly this report summarizes twoversions of deterministic time-varying linear system theory: the standardfrequency-shift version, applicable to analysis of detection and measure-ment extraction using CW pulses and the more novel frequency stretch(doppler) version, applicable to analysis of detection and measurementextraction using FM pulses.
The approach is to characterize the various parts of the signal pathbetween a sonar transmitter and a sonar receiver as linear time-varyingsystems. The theory then provides means to characterize the signal atvarious point along the path, to characterize the parts of the pathbetween these points and to relate these characterizationS. Specificallythe signals are characterized by cross-ambiguity functions (called theambiguity function for the transmitted signal), which tell what theresponse to the signals of a bank of matched filters would be as a functionof time shift and either frequency shift or frequency stretch; the partsof the path are characterized by spreading functions, which tell how theparts spread the signal in time shift and frequency shift or frequencystretch and the relationship is a modified double convolution in timeshift and frequency shift or frequency stretch.
Rihaczek [1i made an extensive study of the use of matched filter radarsand since he was primarily interested in point targets and a perfectmedium, he investigated in great deta! ambiguity functions of thetransmitted signal. In fact his book could be titled "All You Wanted toKnow about Ambiguity Functions but were Afraid to Ask". The use of thestandard theory was applied to sonar problems by S~strand (2), whosedevelopment is followed here with minor modifications. Kelley and Wishner[3) studied generalization of the classical ambiguity function includingthe doppler ambiguity function studied herein. They were also interest inthe situation in which acceleration of the target caus .d a significantchange in velocity during the duration of the transmittei pulse. Whileacceleration can be very important with targets such as mi-iles, it seldomis so in the sonar situation and, hence, is neglected herein. The completedevelopment of the frequency-stretch theory presented here is believed to
, be novel.
Weston [41, Kramer [51 and Russo and Bartberger [6] have all derived thedoppler ambiguity function of a linear FM pulse in terms of Fresi-lIntegrals with differing limits of integration. Russo arid Bartbe,ger givethe exact limits, which are rather complicated, while Weston uses a gross
pR NPEDIG pAZ BP L -w - Nor3

SACLANTCEN SR-44
approximation to obtain the general behaviour of the doppler ambiguityfunction not only for linear FM pulses, but curved FM pulses as well.Weston's paper is highly recommended for its physical insight into thenature of ambiguity functions of FM pulses. Kramer (and T. Kooij inunpublished work of 1964) uses limits of integration that are validapproximation for time shifts small compared to the pulse lengths; hereinthe next level of approximation to the limits, which allows large timeshifts but ignores changes in length of the signal, is derived. Thisapproximation is valid for normal sonar situations when the time-bandwidthproduct of the FM signal is less than 750. Furthermore it is shown thatwhen in addition the time-bandwidth product exheeds 50, the Fouriertransform with respect to time shift of the doppler ambiguity function ofa linear FM pulse takes a particularly simple form.
A good and useful example of the application of the time-shift theorypresented herein is determination of the matched filter output for thebistatic echo from a moving, turning line target for a linear FM pulse,when all medium effects other than propagation delays are ignored. The
doppler spreading function of suLh a target may be readily approximatedin a simple form and then used to obtain the matched filter output as aconvolution between an impulse response function representing the targetand a window function representing the FM pulse. This result, derivedherein, is also believed to be novel and provides the basis in a sequelfor algorithms for measuring target properties.
Two topics I will not be concerned with in this report are propagationloss and background. The sonar equation and its extension may be utili-zed to determine level of the echo with respect to background at thematched-filter-bank input; I am concerned with how that echo is spreadin time and frequency or Doppler at the matched-filter-bank output.Both pieces of information are required for investigating detection andmeasurement extraction. The theory presented herein and in a sequel onstochastic systems have direct application to the analysis of reverbera-tion, but I will not pursue that topic either herein or in the sequel.
The main results are contained in the body of the report with thedetailed derivations relegated to appendices. The body of the report isdivided into two sections: the first is concerned with development of thetheory while the second is concerned with its application to finding thematched filter output of the bistatic echo from a moving turning targetfor a linear FM transmission in a non-dispersive medium.
II4

SACLANTCEN SR-44
THE THEORY
Figure 1 is a simplified block diagram of a single beam of an active sonarsystem. The matched filters bank consists of a set of filters matched tothe transmitted signal x(t) shifted in frequency by different amounts.In practice, for a CW pulse the matched filter bank is realized by taking atime sequence of Fourier transforms of segments of echo whose length approx-imately equals that of the pulse, while for an FM pulse only a singlematched filter matched to the transmitted signal is used because of thelarge doppler tolerance of this signal. This form of processing is predi-cated on the assumption that the doppler effect is a frequency shift, whenin actual fact it is a frequency stretch; therefore, the matched filterbank should consist of a set of filters matched to x(t) stretched infrequency by different amounts. Fortunately for an CW pulse the frequencystretch is adequately approximated by a frequency shift while for an FMpulse use may be made of the equivalence between zero frequency shift andunity frequency stretch.
x=yo MEDIUM Y TARGET Y2 MEDIUM Y3 MATCHED F3 (T,V},Yol D 1 FILTER D(
TRANSMITTER 01 S D S23 BANK OR 3DQ)SIGNAL
FIG. 1 SIMPLIFIED BLOCK DIAGRAM OF A SINGLE BEAMOF AN ACTIVE SONAR SYSTEM
1.1 The cross-ambiguity function
Since we are trying to analyze the matched-filter-bank ouput, it isreasonable to characterize the signal y(t) at various points betweentransmission and reception by what output it would yield if used as inputfor the matched-filter bank. This function of the time shift T and thefrequency shift v or the frequency stretch ot is formally known as thecross-ambiguity function pi or ci. Throughout the report the super-
script D - for doppler - will be used to denote the frequency stretchversion of variables. In Fig. 1, the cross-ambiguity function orD3 of the echo is the matched-filter bank output, while the ambiguity3function of the input y or yD D (where the cross prefix is
0 =0dropped for obvious reasons) tells how the transmitted signal is spread in
Dand v or a . The cross-ambiguity functions and are definedby 0
[ e- jv ~ -T ) x*(t-T) Yi(t) dty-ci( 'y ) e (Eq. la)
~~D ( , = X*ra(t-T)] Yi(t) dt. (Eq. lb)
1! 0where * denotes complex conjugate.
5

SACLANTCEN SR-44
1.2 The spreading function
The effect of the target on the signal is to shift it in time and dopplerdue to its range and range rate and to spread it in time and doppler dueto its apparent length and apparent turning rate. It is of course theseeffects that can be used to measure these properties of a target asPlaisant has so ably investigated [7,8). On the other hand, the effect ofthe medium on the signal is to spread it in time and fequency due tomultipaths and motion in the medium. Since a time-varying linear systemsuch as a target or the medium modifies its input y1 (t) in time and
frequency or doppler; it is not unreasonable to suppose that its outputYo(t) be a weighted sum of the input shifted in time and either shifted or
stretched in frequency:
000 2Trjv( t-T)YOM y e2Yl(t-T) SoI(T,v) dvdr , tEq. 2a)
•W -00--
- f f yl[a(t-T)] SIO(T,a) dvdT (Eq. 2b)-0 0
Equations Za and 2b define the spreading functions 301(T,v) and
SI(T,a) of the system producirg yo(t) from Yi(t).
It is more standard to describe a time-varying linear system by itsimpulse response hi0 (t,j), which is defined as the system output at time
t due to an impulsive input at time t-T. Use of an impulsive inputYl = 6(t-T) in Eqs. 2a or 2b yields:
hlo(t,T) 7 e2 'j ( S10 (T,v)dv , (Eq. 3a)
- f 1 SDO((0-) t +T (Eq.f 10( , ) dt (Eq 3b), 0
From the similarity of Eq. 3a to a Fourier transform it is clear that itcan be inverted to yield
S10(T,v) = f eLj\LTJ h10(t,T) dt. (Eq. 4)
By its very linearity every time-varying linear system has an impulseresponse; therefore it has also an ordinary spreading function. On theother hand, it is apparent from the impossibility of inverting (Eq. 3b)that not every time-varying linear system has a Doppler spreading function.Nonetheless some very important systems do have Doppler spreading functions.
14

SACLANTCEN SR-44
1.3 The fundamental relationship
Of key importance to the analysis is the relationship between the cross-
ambiguity functions ¢I or and 0 or 0 of the input and output
of a linear time-varying system as characterized by its spreading functionD
S 10or SI0 ; this relationship is a modified convolution in T and v
or a as illustrated in Fig. 2. By applying this result recursively
staig with or (the ambiguity function of the transmitted
signal), 0j or 1 , 2 or 02 and finally 3 or 3 (the cross-
ambiguity function of the echo) may be computed. Altarnatively the
relationship between the overall spreading function SAG or SAC of the
D Dtwo systems with spreading functions SAB or SAB and SBC or SBC,which is the same modified convolution in T and v or a as isillustrated in Fig. 3, may be applied recursively to find the spreadingfunction between transmitted signal and echo and the originalrelationship between transmitted signal and echo used to find 3
I or
D D0i r D D D o"Dor Sio O =SIOT,IP!
FIG. 2 RELATIONSHIP BETWEEN THE INPUT AND INPUT CROSS-AMBIGUITYFUNCTIONS AND THE SPREADING FUNCTION OF A TIME-VARYING
A LINEAR SYSTEM
A SAB S BC C
or SAB or SBC
SAC SBC x 'SABTV
orSS x
AC BC AB,)
FIG. 3 THE SPREADING FUNCTION OT TWO SYSTEMS IN TAMDEMIN TERMS OF THEIR INDIVIDUAL SPREADING FUNCTIONS
7

SACLANTCEN SR-44
The modified double convolution operators ® and ) required aredefined by TV Tt
b ' a(T,V) = f e a(T-T',v-v') b(T',v') dv' dT'T,V-0 -
(Eq. 5a)
bD ®) aD(T) = 0 aD[a'(T-T'), -r- bD(Tr',c ') da' dT'-0 0 (Eq. 5b)
By rewritting the definitions (Eqs. la, ib, 2a and eb) in terms of thesemodified convolutions, it may be shown that the relationships depictedin Figs. 2 and 3 hold.
1.4 Some approximate relationships
As will be seen below the ordinary ambiguity function of a signal suchas an FM or CW pulse is much simpler in form than its doppler ambiguityfunction while, on the other hand, the doppler spreading function of atarget is much simpler than the ordinary spreading function. Let B bethe bandwidth, T the duration and fo the carrier of the signal.
For sufficiently small signal time bandwidth product BT and targettime stretch a sufficiently near 1 , namely for
BT j - < 0.2 (Eq. 6)
the frequency stretch a may be approximated by a frequency shift(a-l)fo since in this case the maximum phase error caused by so doing
is negligible.
When Eq. 6 holds, it follows that
10 f S1 (T, 1 f ) (Eq. 7)00
Note that Eq. 7 is exact for a = 1 (i.e. v 0), since the approximationis exact for a = 1.
Clearly Eq. 6 usually holds for a CW signal (with BT = 1) in typical sonarand radar applications. On the other hand, for the linear FM in typicalsonar appli~ations as opposed to typical radar applications for whichIa-1I is usually much smaller -(6) often does not hold.
8

SACLANTCEN SR-44
From the foregoing it is obvious that for a low BT signal, such as a CWpulse, analysis of sonar detection and measurement extraction may becarried out using the ordinary theory with the exact spreading functionreplaced by an approximate spreading function found from the Dopplerspreading function of the target. On the other hand for a high BT signalsuch as a linear FM pulse the exact spreading function, which is apt to bemuch more complicated, must be used if the ordinary theory is applied. Onecan regain a simple form for the spreading function, at the cost of amoderate increase in complexity of the ambiguity functior, by using thefrequency stretch version of the theory.
There is, however, one fly in the ointment -- it is more convenient torepresent the time and frequency spreading effects of the medium via theordinary spreading function. Fortunately, it is possible to approximate
<0.2 f(T,a + for v as an ordinary cross-ambiguity functiono BT
and thus show that
D (T,a) e2wJr'(T-T') - - T D' ,0 .. f__ _T- ' -o SIo(T ,v') dv' dt'
fo (Eq. 8)
if S1o(T',V') is negligible for v' > 0.2 fo/BT. For example,
if fo = 3,500 Hz, B = 220 Hz and T = 0.5s; this limit is roughly7 Hz (or a Doppler shift of ± 3 knots), which should be sufficientto include most frequency spreading in the ocean. Use of thisapproximation allows us to use the Doppler-shift version for large BTsignals while using the ordinary spreading function to model the medium.
j9

SACLANTCEN SR-44
2 SOME APPLICATIONS OF THE THEORY
In this section some applications of the theory just summarized are givenboth to illustrate the theory and because of their own inherent interest.The goal of these applications is to derive the relationship between the
matched filter output for the bistactic echo from a linear FM pulse for amoving, turning line target in a non-dispersive medium. To apply thefundamental relationship to determine the matched filter output, it isnecessary first to use the definitions to obtain the ambiguity function ofa linear FM pulse and the bistatic spreading function of a moving, turningline target. Along the way it is convenient to include the propagationdelays in the target spreading function.
2.1 The ambiguity functions of a linear FM pulse
As an example of an ambiguity function consider the modulated linear FMpulse
XFM(t;fo9k,T) (t;T/) e ) (Eq. 9)V-T
whcre f0 is the carrier frequency, T is the pulse length,
B = JkJT is the bandwidth and
(t;T ) I if JtJ<T (Eq. 10)0 if JtJ>T
Its ambiguity functions are2irJ(fo+ v)T
YFM(TV; fo0(k,T) = (1 - )X'L(T,T)e sinc[ir(T-ITJ)(kT-v)]T
..nj(fo+ v)T
;Le f sinc[Tr T(kT-v)] for T << T
(Eq. Ila)
YFM(T7Tj f2kT =2r--)f 0T MfY M(TOa; fo k,T) :e YFM[aT-(O-I)-T- , - ; fok,T] (Eq. l1b)
11 0 F

SACLANTCEN SR-44
where an approximation to yFM will be given shortly. The ordinary
ambiguity YFM given in Eq. lla is well known and needs no comment beyond
the fact that the ordinary ambiguity function of a CW pulse is obtained by
setting k = 0 in Eq. lla. The doppler ambiguity function yFM is
expressed in Eq. llb in terms of MFM because the matched filter output
for a linear FM signal frequency stretched by ot0 , from Fig. 2 and
Eq. 5b (since S O in this case is 6(T) 6(a-a )), is
a +171j (---)foT M (T fy (at,-)
( oo I e YFM a M -(0 .a (Eq. 12)
Thus if (a +1) f0/2 is taken as the carrier of the matched filter outputM M represents the modulation; it is time shifted so that its peak in TYFM
for given a is near T = 0.
When yFM is found by substitution of xFM for both x and y in Eq. lb
and use of the result in Eq. lz, it is can be expressed in terms of Fresnelintegrals with rather complicated limits; however suitable approximationyields simpler limits that are valid for most sonar purposes. It isconvenient to give the results in terms of the following normalizedvariables:
X : kT fTl 7 /az kT/T7f
z k T T (Eq. 13)
In general f0 and T (and hence v) are determined by external
circumstances and the choice of k is available for optimizing the
properties of M ; therefore x , y and z are referred to as theYFM
normalized bandwidth (since IkTI B), normalized time stretch andnormalized time shift respectively.
ji In terms of these variables
r~M 2ZIYFM(z 'y; x'v)="j- l( Y X-
•{c(b)-c(a)+j sgn(xy)[S(b)-S(a)} + c (Eq. 14)
1 12

SACLANTCEN SR-44
where te jt2
C(t) +j s(t) = f dt
= ],a = V' "ym xy- -(l+vy) + I(Y - T -)/
b = Y/-Tx- I-+ (l+vy) - i(Y - - VX1
[ vz / ,Z 2 Z / 21- xy (y - l+vy
c < , v - + o.27lxyl)l+VY
and sgn( ) means sign of. Not that for v = 0 these relationships
are both much simpler and exact (i.e. E = 0).
It will be seen that the maximum value la-li of interest is 0.02. In1
terms of the original variables E < ia-lI(i + 0.27 BT c-11); there-
fore for BT < 750, c can be neglected with respect to the maximum of
yMM which is from Eqs. la, lb, lla and llb y M(0,O; Xv) = 1
Since yDM(aT, 1/a) is the output of filter matched to XFM when its input
is XFM frequency stretched by a , its fourier transform with request to
T is the product of the matched filter transfer function times the* fourier transform of the frequency stretched signal. For large BT - which
for fixed x corresponds to small v - these both have the same form:quadratic in phase and rectangular in magnitude; hence the fourierI Dtransform of yFM(cT, I/c) with respect to T is readily obtained. This
result may then be time and frequency shifted in accordance with Eq. 12 to
yield rM(f,c) the fourier transform of yFM(T,a) with respect to T.o(If the fourier transform is made with respect to the normalized variable
z instead of T the result is B rF ;M it is convenient to ignore this
factor and consider rFM to be the fourier transform of yFM with respect
to z expressed as a function of the normalized frequency w = f/kT.)The result in normalized variables
rPM(w,y; x,v) (y/x; 1) 1 (2w; I-yi-) e2nj ( x y w2 + Y3/4x) (Eq. 15)
This expression is exact for v 0 and, in fact its inverse fourier withrespect to w is Eq. 14 with = - as it must be.
13

SACLANTCEN SR-44
M ad rM are on vTo determine how strong the dependence of yFM a M
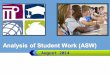
max IY M(zoY ; x,v) - yM (z,y ; x,o)l was computed for various x y
and v . The results are shown in Fig. 4, which gives this maximumerror as a function of y v/O.02 = cl-lI/0.02 for various x andx/v = BT. The maximum value la-li used was 0.02, since, as mentionedearlier, this will be seen to be the maximum value of interest. Asmight be expected the error is strongly dependent only upon BT.
From Fig. 4 it is clear that for BT > 50 the error in using v = 0.0
is negligible compared to the peak value of ¥FM ' which is
YFM(O, 0 ; x,v) 1. One should not expect, however, that for such
values of BT, FFM will take the nice form given in Eq. 15. In fact
because of Gibb's like phenomenon the actual magnitude and phase willoscillate around the rectangular magnitude and quadratic phase of
Eq. 15. Nevertheless it is reasonable to say that FM(wy ; x,o)MFM
approximates F M(w,yXv) whenever yFM(Z,y ; x,o) approximates
YFM(z'y xv).
The quadratic phase dependence in Eq. 15 implies that the frequenciesMin YFM differing from the carrier are shifted in time with respectin YFM
to the carrier; i.e. that the peak of YFM for a given y is
broadened in y . This effect is shown graphically in Figs. 5, 6 and 7,
which are graphs of IYFML versus z for v = 0 and various x and
y . In fact the fourier transform of IYFM(zy ; x,o)12 with respect
Mto y is readily found by autocorrelation of r; xo) with
respect to w to be
(Eq. 16)
Two iimiting cases are of interest: for small xy the last factor
is essentially unity for lwl<l-lx,yl and ly M12 is just the inverse
fourier transform of the first two factors with respect to w ; namely(l-ly/xl) 2 sinc 2[n(l-ly/xl)z] -which is of course the classical result
' found when the doppler effect may be approximated by a frequency shift.
On the other hand for large xy the first two factors in Eq. 16 may bereplaced by unity and the last approximated by sin [21rTxyiw(l-Jx/yJ)];
14

SACLANTCEN SR-44
'I 2 D
for arius xv = BT and0IX1.21. T 0
0 2
FIG0.4 YaxiO .5ZY ~) ymY0.2V: o-)00z MF(Zi 'olVfo(4iu xv B n
I1. 9YO-AZ 0 .M0HFT -
FI0S hMK V O8X 13 AD AIU

SACLANTCEN SR-441.2-
yPO
0.8y=0.2
y=0.5
y=0.750.4
yi .0
0'-4 -2 0 2 4
1 NORMALIZED TIME SHIFT -z
FIG. 6 Y VS Z FOR X = 2.6 AND VARIOUS Y
1 2
y=O.O
0.8
I
0.4-
.y=0.5
-4 -2 0 2 4
NORMALIZFD TIME SHIFT -z
FIG. 7 yM2 VS Z FOR X = 5.2 AND VARIOUS Y
16

SACLANTCEN SR-44
hence 1yFM 12 is 1 .- [z ; flyxl(l-ly/xl)] - which is theFx(l-Iy/xI)
result obtained by Weston [4].
The FM doppler ambiguity function just discussed in detail is for a pulsewhose center corresponds to t = 0. In section 2.4 the FM doppler0'ambiguity function YFM(aT, 1/a) for a pulse whose center has an abitrary
time tT is required. Furthermore, in that section a simple relationship
between the doppler ambiguity function for a close to a0 and that for
U is required. If the definition of the doppler ambiguity function
(Eq. lb) is applied for an FM pulse centered on tT and the frequency
stretch a replaced by a frequency stretch a plus a frequency shift
(a-o)fo , the result after suitable algebric manipulation and approx-
imation is
-o f 2a-a 0-0' a- j a-a o t)' /o
F(aT e Y M[aO(T + f + t AtFFM0 a 2 k 0 CtT) ,~0
(Eq. 17)
which is valid if
0.2 0 05B .2BJla_-I < min BT 0.05 ' -- BT (Eq. 18)
00
2.2 Factoring propagation delays into the target spreading function
An important application of the fundamental relationships illustrated inFig. 3 is to make a convenient modification to the medium and targetspreading functions. In their most straightforward versions the propaga-tion delays to and from the target are included in the medium spreadingfunctions. It is more convenient to transfer the direct path delays intothe target spreading fuiction so that with a non-dispersive medium only thetarget spreading function need be used to relate the matched-filter-bankoutputs to the ambiguity function of the transmitted signal. In thisversion the medium spreading functions are only used to represent dispersive
4.I effects of the medium,
The procedure to be carried out is illustrated in Fig. 8 for the frequencyshift version where S01 ., S1 ,2 1 and S2, 3 are the spreading functions for
S0 (,,~) d S 2(TE) ST ?3 (iv)
FIG. 8 RELATIONSHIPS BETWEEN TWO VERSIONS OF A SIMPLIFIED ACTIVE SONAR MODEL
17

SACLANTCEN SR-44
the straightforward version (delays in the medium spreading functions);S 01 , SI2 and S23 are the spreading functions for the more convenient
version (delays in the target spreading function) and STD(Tv; Td) and
STA(T'V; Td) are the spreading functions of a time delay and a time
advance by Td. Obviously STA followed by STD or vice versa cancel
each other. The results from use of Fig. 3 and Eq. 5a to combine spreadingfunctions are as follows:
Sol(Tsv) = Sol,(T.TdTV)
S SI2(TM) = e-27JTdT S12(T-TdT-TdEV)
S23 (,v) = e2TrJTdE S213(T+TdE,'v) , (Eq. 19a)
where rdT and TdE are the transmission and echo direct path propagation
delays. From Fig. 8 it is obvious that S12(Tlv) is the spreading
function of the overall system for a non-dispersive medium.
For the time stretch version the same procedure may be used to yield
D D
0 dTT1-, TDT ,cL)
TdE _ , (Eq. 19b)
as before, S 12(T'ca) is the Doppler spreading function of the overallsystem for a non-dispersive medium.
2.3 The bistatic spreading function of a moving, turning line target
The target model and geometry to be investigated is shown in Fig. 9, wherethe variables used are defined in Table 1. The values of the variables of
,j interest are those that obtain at a given time that may conveniently betaken to be t = 0. It is assumed that the medium is noise and reverbera-tion free, has no propagation loss and does not spread the sianal in timeor frequency. Taking into account noise, reverberation and propagationloss presents no particular problem and may be done essentially independently
18

SACLANTCEN SR-44
a = 0 Target
/ Ci'S / Yr vr Rr
/R Receiver/ r T
VT T
pTTra nsmi tter
FIG. 9 BISTATIC GEOMETRY
TABLE 1
LIST OF VARIABLES
a Target aspect
y Bistatic angle
I T Bearing of target with respect to transmitter
i IR Bearing of target with respect to receiver
A v Target speed
vT Transmitter speed
VR Receiver speed
rT Range from transmitter to centre of target
rR Range from receiver to centre of target
a Distance along target
pT(a) Range from transmitter to point at a along target
P R(a) Range from receiver to point a along target
19

SACLANTCEN SR-44
of the development presented he'rein; however including time andfrequency spreading requires a modification of the present developmentusing the techniques described above. One point of possible confusionis the use of a for both the aspect and the doppler shift; fortu-nately the context makes clear which use is implied.
For short periods of time each point along the target may be assumedto have constant range rates with respect to the transmitter andreceiver that are readily determined from the geometry. The corres-ponding time stretches and hence the doppler spreading functions foreach point may then be determined and summed to yield the targetspreading function. The result under the assumation that the signalarrives at the target near t = 0 is for a target whose points havereflectivity f(a)
r 6[u-1 4 _ Z a-1 rT
s\') S (1-a) 6 c -c- (-c +c c ]
(Eq. 20)
where 6( ) is the Dirac delta function, c is the speed of sound and
Z rT + rR
T + rR -(v6 + vT cos T + y R)
6 [cos a + cos(I-y)],
a cos /c6
S[& sin a (&- ) sin(a-y)]/6 (Eq. 21)
For a monostatic situation the same results apply with y 0rT = rR .r, q; and v =v henceT I . R vTR hec
= 2r = -2(v cos a + vTR cos 4)
=2 cos ot
a = /2c
,6 tan a (Eq. 22)
20

SACLANTCEN SR-44
2.4 The matched filter output for the bistatic echo from alinear FM pulse for a moving, turning line target in anon-dispersive medium
To find the match filter output D(T,l) it is necessary to substitute
the approximate FM ambiguity and target spreading functions given inEqs. 17 and 20 into the fundamental relationship defined by Fig. 2 andEq. 5b. Recall that tT is the center of the FM pulse. If tT = -rT/c
the signal will arrive at the centre of the target at t = 0 ; thereforelet AtT = tT + rT/c so that AtT = 0 implies tT = -rT/c The
results to be given only apply for small AtT say on the order of theI length of a single ping (which may include several pulses)* since onlythen will (Eq. 20) be valid. The result of the substitutions with
=I - Z/c is
2Trj fO(r- T( qp3(T,l) e M(T-Td) (Eq. 23)
where
o 2c 0(Z + 'i V( c AtT)/C,
t= [+ (AtT + --)Ic
SM(f) [ M(T)] F (f, lt/c)HM(f)
HM(f) F(S{[l c AtT +](f+f) cL f(c-i)2 (c-t) 2 k 2c
F) [f(-T) (Eq. 24)
and 1 [] indicates Fourier transform of
In geneAa'w t may not be known. This i. not impotant 6o tong a,6
? the 4gnaC and matched fitter are timed to the 'same tefeAence.
21

SACLANTCEN SR-44
Severall points may be observed about this hodgepodge:
* The carrier of the matched filter output is both time
and frequency shifted as a function of
, The modulation of the matched filter output is shifted
in time by a different amount as a function of
Transformed into the frequency domain the modulationof the matched filter output is the frequency shiftedand stretched target transfer function F(f) observed
through the window r M which has been discribed
above.
Since [c/(c+Z)]2 t 1, the effect of S on the transferF(f) is a stretch in frequency proportional tol/[l-S(At+f /k)] z l+5(At+f /k) and a shift in frequency
of s(AtF f' + £ f'/Zck)SAtF fo since Iel/c < 0.02.
At this point a word about the validity of the approximation used above isin order. In the first place Eq. 18 must be obeyed if Eq. 17 is to bevalid and hence Eqs. 23 and 24 hold. If the length of the target is Lthen f(o) must be zero for o >ILI; therefore from Eq. 20 the maximum
value of Ic-ctI is (recall a = l-i(/c) I l-a)l , whose maximum
in turn is L Icl. Thus for fo = 3500 Hz, 5 = 220 Hz, T = 0.5s and
L = 100 m, Eq. 17 implies Ia! < 3.82 /s corresponding to a full turn in
1.57 minutes. If Eq. 6 is satisfied then the ordinary ambiguity function
may be used to determine rM The value of x of interest in Eq. 6i FM'
is X = ao ; hence a-I -/c whose maximum is (2v + vT + VR)/c.Thus for the signal parameters just given 12v + vT + VRI < 2.73 kn to
insure the ordinary ambiguity function may be always used - a rathersevere constraint. On the other hand constraining 12v + vT + vj to beless than 60 kn, which is equivalent to la-lI < 0.02 , does not seemvery onerous. This constraint has been used previously in discussing
approximations for D
22

SACLANTCEN SR-44
CONCLUSIONS
Two version of linear time-varying system theory are of use in analysis ofactive sonar systems: the ordinary (frequency-shift) version, whichapplies for CW signals and the doppler (frequency-stretch) version, whichapplies for FM signals. When the doppler version is used to determine thematched filter output for the bistdtic echo from a moving, turning linetarget in a non-dispersive medium the result is that the modulation of thematched filter output is the time-shifted convolution of a frequencyshifted and stretched impulse response representing the target and a windowfunction representing the signal.
I.r 23

SACLANTCEN SR-44
REFERENCES
1. RIHACZEK, A.W. Principles of High Resolution Radar, McGraw.-Hill,New York, 1969.
2. SOSTRAND, K.A. Mathematics of the Time-Varying Channel. Presentedat NATO ASI on Signal Processing, Enschede, 1968.
3. KELLEY, E.J. and WISHNER, R.P. Matched-Filter Theory for High-Velocity Accelerating-Targets. IEEE Trans. on Military ElectronicsMIL-9, 1, 1965: 56-69.
4. WESTON, D.E. New Calculation Methods for Echo-ranging Ambiguity.IEEE Trans. on Information Theory IT-13, 3, 1967:432-441.
5. KRAMER, D.A. Doppler and Acceleration Tolerances of High-Gain,Wideband Linear FM Correlation Sonars. Proceedings of IEEE55, 5, 1967:627-636.
6. RUSSO, D.M. and BARTBERGER, C.L. Ambiguity Diagram for LinearFM Sonar. Journal Acoustical Society America 1965: 183-190.
7. PLAISANT, A. Error Model for Some Submarire Target Parametersin Noisy non-dispersive Channels. SACLANTCEN SM-87, La Spezia,Italy, SACLANT ASW Research Centre, 1976, NATO RESTRICTED.
8. PLAISANT, A. Measurement Accuracy of Some Target Parameters.In: Sutbmrine Echo Properties, Proceedings of a Conferenceheld at SACLANTCEN, NATO CONFIDENTIAL, SACLANTCEN CP-18,La Spezia, Italy, SACLANT ASW Research Centre, 1976: 10-1 to10-15, Part I.
'1
5iMMING PAGS RU OT I
25

A
APPENDICES
-eP

+ SACLANTCEN SR-44
APPENDIX A
DERIVATION OF THE RELATIONSHIP
BETWEEN THE IMPULSE RESPONSE AND THE SPREADING FUNCTIONS
Substitution of Yi(t) 6(T'r-T') into Eq. 2a yields
h(t,t-T') = fe21jvk tT)6(t-T-T')S(v,T) dvdT
.- o f e 2IjvT S(V,t-T') dv
since h(t,t-T') is the output due to an impulsive inhut att-(t-T') - T'. Replacing t-T' by T(* T' = t-T) yields Eq. 3a.Similarly substitution of Yi(t) = 6(t-T') into Eq. 2b yields
hl0(tit-T') f f 6a[(t-T) -T'] SI0(T,a) dadT-00 0
f f I 6(at -T-T') D- TQ -oo a Si0(cta) dtda
Replacing t-T' by T yields Eq. 3b.
r 27

SACLANTCEN SR-44
APPENDIX B
DERIVATION OF THE FREQUENCY-SHIFT VERSION
OF THE FUNDAMENTAL RELATIONSHIPS
The derivation takes place in two steps: first some properties of the
modified double convolution (' are derived and then these propertiesT, V
are utilized to prove the relationships.
B.l PROPERTIES OF THE MODIFIED DOUBLE CONVOLUTION
From the definition Eq. 5a
a b(T,v) = f77 e 2 V(Tt')b(T-T',v-v')a(T',v')dv'dTT'V -O -00
:0 0 e2J(v-v')t'a(T-T',v-v')b(T',v')dv'dT ',
which clearly does not in general equal b ( a(T,V). Furthermore,T,V
from Eq. 5a with T,V,T' and v' replaced by T-T',V-V',T"-T' andv" -VI:
b ( a(T-c',v- v')= f fe2J(v")(T-",-v")b(T"-T',v"-')dv"dT
Substitution of this into Eq. 5a yields:
00 CO CO CO
c )' (b x' a)('u,v) f f e 2 jv ' T T ') f f e27j (V - (T -T"0- 00 -C -0 --C(I
TV TV
• a(T-T",v-v")b(T"-v,v"-v')dv"dT'" C(T',v')dv'dr'
f f e a(T-T",V-V"
L, -Co-r.Z e2J (T - )b(T"-'U',v"V')C(T',v')dv'dT'dv"dr"
(c ®' b) ®' a(T,v)
T,V TV
on use of Eq. 5a twice more.
29 pFlED IG PAG1 B-M( '1KE l,

SACLANTCEN SR-44
Thus the operator ( has two properties of importance: it is associative,
but not cummutativeT'VThe true double convolution operator ) , whichT,V
differs from ' in that it is defined by Eq. 5a with the exponentialT ,V
term of the integrand removed, is both associative and commutative.
B.2 THE FUNDAMENTAL RELATIONSHIPS
Note the similarity in form between Eqs. 5a and 2a, the definition of thespreading function. The definition of the cross-ambiguity function (Eq. la)is seen to take the same form if it is rewritten
00 0i(T,v) f f _ e _v( -T ) V,' X*(T.T')]yi(T)dv'dT'.
As a direct result both Eqs. la and 2a may be written in terms of CYTV
$i(T , )= yi ® X(T,v)
TV
YO(T) : )' Yl(T,v) , EQ BI)
where
4 x(T,v) = x*(T)6(v).
Use of these two results and the associative law yields:
p0 (r.V) = Y0 (D x (T,v)T'V
= (SI0 (Y YI) ( X)(T,v)
T N) T N)SIO TV
3T,0 TV
30

* SACLANTCEN SR-44
which is the relationship of Fig. 2. Use of Eq. BI twice and the4 associative law yields:
YC(T) S BC 0~ (S AB (D YA) (T,V)
T,V T,V
(S BC 0 SAB) @ YA (T,V).TV T,V
* But from Eq. Bl,
YC(T) = S AC (V YA(T')).t v
Since these results hold no matter what YA(T) is, it follows that
the relationship of Fig. 3 must hold.
Ot
'~31

V V SACLANTCEN SR-44
APPENDIX C
DERIVATION OF THE FREQUENCY STRETCH VERSION
OF THE FUNDAMENTAL RELATIONSHIPS
As with the frequency-shift version, the derivation takes place in twosteps: first some properties of (V are derived and then these
T ,Lproperties are utilized to prove the relationships.
C.l PROPERTIES OF THE MODIFIED DOUBLE CONVOLUTION
From the definition Eq. 5b and an interchange of order of integration:
aD 0' bD(T,) ' bD[( -T), aD(Tx')dT' d'T,cx
0-0a
fOo0 aD (T- cV , ) bD(T,a')dT' dc '
which clearly does not in general equal bD 0 aD(T,a). Fu,hermore,
from Eq. 5b with T,C,T' and a' replaced by '(T-T'), (T"-T
f}!and all
CO COD rD li
b(V ff Da j,( La ), T 5, , " daTcT_,) Ct aT
tOiT"
33--,0
r33

SACLANTCEN SR-44
Substitution of this into Eq. 5b yields:
D bD D Dooo D , a l ,
cD (Y (b (V a )(T,cx) = c"00 a [a"(T-T"), -w]b [a(T"-TI, -- ]oO dT"
cD(r' a')da' dT'
00 00 aD 00~ 00bD all: ~ ~ f b T ) [a' (T"-T'=f f aIcI(J3, ~rf Da~x~T)-00 a -00
c cD(T' ,' )da'dT'da"IdT"
(cD ® b D) 0V a D(T,,a)T,a T'ct
on use of (5b) twice more. Again x is associative but not commutative.T,a
C.2 THE FUNDAMENTAL RELATIONSHIP
Note the similarity in form between (5b) and (2b), the definition of thedoppler spreading function. The definition of the doppler cross-ambiguityfunction (Ib) is seen to take the same form if it is rewritten
S(aa ) X*[T-T')] yi(T') da' dT'H -oo
(The factor a in front of the integral in the original definition (lb) wasinserted to yield this convenient form.) As a direct result both (lb) and (2b)may be written in ter.s of I:
0D(a = yi X D (T,a) ,TTa
y (r) (1 0 Y1 (T,a), (Eq. Cl)
where
D (,a)U
X X T34

SACLANTCEN SR-44
Use of these two results and the associative law yields:
D = Y0 x ' X D(T,)
T'ca
=(sI D ' ) 0l ®' x D(Ta)
T Ct T OD
0 ®'(Yl ® xD(r'a)
Tc( T,cz
SsD ®' ¢(T,)
10 T,a I
which is the relationship of Fig. 2. Use of (B-1) twice and the associativelaw yields:
Yc(T) S D ® (SAD ® A(T,aY()=BC r,ct TQ ,
SBC ® AB)T Ct Ta
But also from (C-l),
YC(T) = SAC ® YA(T,Q)TO,
Since these results hold no matter what yA(T) is, it follows that therelationship of Fig. 3 must hold.
bi'
35

SACLANTCEN SR-44
APPENDIX D
DERIVATION OF THE PPROXIMATE RELATIONSHIPS
This appendix is concerned with showing two things: For low 3T productsignals, such as CW pulse, the spreading function of a moving target maybe replaced by its much simpler doppler spreading function and thestandard version of the theory applied. For high BT product signals,such as linear FM pulses, the doppler spreading functions of the mediummay be replaced by its ordinary spreading functions and the doppler versionof the theory applied.
D.1 REPLACEMENT OF THE ORDINARY SPREADING FUNCTION BY THE DOPPLER
SPREADING FUNCTION
A fundamental approximation used in communications theory is that for asmall BT signal modulated on a carrier x(t) the doppler shift affectsonly the carrier:
2j( -l)f tx(at) z e 0 x(t) (Eq. Dl)
This approximation is discussed in detail by Rihaczek ([1i pp 56-65), wherehe derives the general condition that for it to be a good approximation (6)must be satisfied.
When the approximation is valid its substitution into (lb) yields
Dj 27j((I-l) fo0(t-T)
¢p(T,) -- 0 tT e x*(t-T) yi(t) dt
which on comparison with (la) becomes
D(1 ,a) [T, (a-I) foJ.
Substitution of this result into the fundamental relationship given by Fig. ZF kand (5b) yields:
.' fo - f f( 1)f- .f f-,- CAS D ' a )da' dT'0' 0 I[ aT fo aS 0 ,0 '
0
W, 10 27j (o'- I fo0(T'T ' ) D al-00- ' - ')fo]Sl (T', )da'dT'0
37 $DIG F," Bu.-oTn-

SACLANTCEN SR-44
Since from (la) and (D-1)
' ) e2wjv(t -'T) x*(t-'T) yi(t) dt
cc = '. e- jV(tT) x*[a'(t-T)] yi(a't) dt
a'e2TJ (cc' -1) f°0 00e - 2 7Tj a ' ( t - T ) x*(t-T) Yi(t) dt
= 2Tr e (X - )f0 I(T ,L'V ) .
Comparison of the above equation for pO[T,(a-l)fo] with the fundamental
relationship given by Fig. 2 and (5a) yields (7).
D.2 REPLACEMENT OF THE DOPPLER SPREADING FUNCTION BY THE ORDINARYSPREADING FUNCTION
An obvious extension of D-l is
Zj (a'-a)f t 0.2x(a't) la e (a) I ' < B . (Eq. D?)
To derive (8) from this result note its substitution into (lb)
1 ¢(T,a+ - -);f ez ~jv(t- ) x*[c(t-T)] Yl(t) dt
fo
for V < 0.2 fo/BT. The right side of this equation is the ordinary cross-
ambiguity function between x(ct) and y1 (t). Furthermore, from (lb),
D0 (T,a) is the ordinary cross-ambiguity function between x(ct) and
Yo(t) evaluated at v = 0; therefore substitution of DO(T,a) foryO(t,) ealud at V , T' , fo
and --n v € (T-T ,a---) for Pi(T-T',-V') in the fundamental00
relationship given in Fig. z and (5a) with v = 0 is permitted and yields (8).
38

SACLANTCEN SR-44
APPENDIX E
DERIVATION OF APPROXIMATE FORMS OF THE LINEAR FM DOPPLER AMBIGUITY FUNCTION
Three approximations are to be derived in this appendix: The first two areMapproximations to the window function yFM from which the FM doppler
ambiguity function is readily obtainable via (lb). The last approximation
is of YFM(OT, 1/a), the doppler ambiguity function of an FM pulse
centered at tT rather than 0, in terms of YFM(oT, 1/a for a near
E.l THE WINDOW FUNCTION
From the definition of the doppler ambiguity (Ib)
D 00
YF /)= f x*(-) x (t) dtYFM(LT' 1/ - FM FM
,CO
= f X* (t-T+T') X [a(tT')] dt.0 FM FM
after change of dummy variable. Substitution of this result and the definitionof the FM pulse xFM into (12) (with o0 replaced by a) yields
f t tMAX 2rj0 °
M U+l fo 1 0YFM (T + k-fa) = T u(tMAX-tMIN) e dt (Eq. El)
tMIN
whereLI u0) : t < 0
It > 0>
~ -ft-1k(t-,T+T)+ af0 aS-fo (t T+T+) f(t+,') + k 2(t+T')
C+l f T
2 o
(a-1) f t- ')I: kaz(t+T')2 -1*'-
39

SACLANTCEN SR-44
and, since xFM (t--+T') is zero outside the interval [T-T'-i ,T-T'4T]
and x is zero outside the interval L-T'-T -T'+ .]
t =min[T-T'T , -T+ = -T +min[-, - - ZT a '
tMN maX[T-T'-,-T'] ' - T T T(o-l)]MIN = 2ax r-T -T - + maxL -, -7 + 2ct
If T' is chosen to eliminate the terms of o that are of first order
in t then y can be easily written in terms of Fresnel's integrals.
Rather than proceed directly on this track it is appropriate to make someapproximations.
Consider first the following approximate limits:
MAX 2 Z 2
t' = T , T +MIN
The maximum error between the actual and approximate limits iB Tij-l I/afurthermore the integrand of (E-i) has unity magnitude; therefore, sinceu(t'MAX - toMIN) =-r -(TT), (E-l) may be rewritten
Y M(T+ a+I fo 1MAX +2j0 +YFM(T kF ' 'LTT e dt +F k Tf toMIN
where
''< T a I-I /a = vfyi/(l+v Y)
from (15).
The next approximation is to neglect (a_1) 2 terms in @ ; i.e. toapproximate a2 = ((-X+l)2 = (c-l)' + 2(a-l) + 1 by 2(a-1) + 1 2 a-l.If 0' is 0o with this approximation, clearly
t o = ' j k(o(-Il (t+ T1) 2
SFurthermore, since leJX <x for real x ,(E-1) may rewritten
fMAX -2Trj
YFM a k+a ,a) = i-L (T;T) J e dt + c + 62
MIN
40

SACLANTCEN SR-44
where
21 < 1 r-(T;T) t k (c'l) 2(t+T') 2
MIN
The value of this last integral is independent of T' ; it is convenientto select T' 'T for its evaluation :
T-ITI+T
I ~ ~ ~ ~ ~ I E T I(_ )2
I TI-TL
T 3 2
< Jkl T2 (a-1) 2<0.27 BT(-I )2 = 0.27 v x y'12
from (15). Therefore for C = 1 + t2
c lci + c21 1-(+ 0.27 BT ia-lI) I (-L-y+ 0.a7x Y2 )
II<I1+ F2 <ia-i i(-L v!i~vy
as is given in (16).
Now T' is selected so that the multiplier of t in is zero; i.e.
so that
2- (a-i) f + (2a-1) k T' - k(T'-T) 0 . (Eq. E2)-3t Ito
If this is multiplied by (t - + TI) and subtracted from theresult is
fi ' = (a- 1) k t2 + 2a-I ,¢ o' ( a ) k t - 1-- k [ (T )2 T '( T '-T )] k L (T _)2 (T '- )(2 '- )J
(a-l)k t2 - (a-l)k T'(T'-T)
But from Eq. E.?
2(a-l)k ('- ) = AkT + (c-I) f4k2

SACLANTCEN SR-44
therefore
[CtkT+ (a-l)f o 2 (a-l)k
-(-1) k t - + T2
4(a-l)k 4
and (E.1) becomes (on replacing T + f by T and jJi(-l)kl t by t)
n b-f b 1j sin[(a-l)k]t
FM T - e dt +c
where
i42 T -'- fl f )2
l)k+ T -koa F],
b / (a--)k k T +- .
This result is equivalent to Eq. 16 on substitution of Eq. 15.
When BT is large an even simpler approximation may be found. As notedD
in the main text the Fourier transform of YFM(cfTrl/a) is the product
of the matched filter transfer function and the Fourier transform of afrequency stretched linear FM pulse. But for large BT (see Rihaczek[1], Chapter 7) the frequency stretched linear FM has Fourier transform
1~-~ . /) [A(f-afO)2-sin(k)/4)j1 (f - •f ocBI2) e
Furthermore, since the matched filter is matched to the unstretchedsignal it has transfer function
7,j[ k(f-fo0 sin(k)/4J
f ' (f ;B/2)e
42

SACLANTCEN SR-44
Taking their product yields
1 c-if2 *ct+1 f a a+1 I-l'FM'' 7/c a -2 o '4 ' 2 o0 0 ~ t
e U 2 - ) o
To obtain FM , it is apparent from Eq. 12 that rDM(f, I/) must
be frequency shifted by - a+ f and then time shifted by -t fo2 o a k
Since in the frequency domain a time shift of AT is a multiplication
by e2nj fAT , the result is
i f /at) 1 OA c+1 B f ti B;2LL B. L-'fF TB 4 0
2c-i 2 1ff a I 2 + act+f1 + (a_ c) 2 f2
*e 42 + 0 f0'i ° e
1 '4 .vt XJ y _L ;(w+vy)B x ' 2 1 ly/xl
22
I e j(2 +Vy )X y w 2 + T -vy x + 4 x! • e
on use of (15). Setting v 0 yields (17) except for the factor i/B,A! whose presence was explained earlier.
The Fourier transform of IyMM(zy;xo)l with respect to z is from
Fourier transform theory just rFM(-w y;xlo ) x rFM(wly;xso) where xw w
signifies cornvolution with respect to w ; i.e. it is the correlation
of rM with itself. Use of (17) yieldsFM
M M M* Mbrw xo x r (w,y;x~o f r WYXO' F M '(-w ,y ;x o ) W FM w 0 ) -O r FM (w 'y;x ,o ) F M (w +w ',y ;x ,o ) d w '
(y /x; l ) ( 2 w ' ;i - 1Y -) [ 2 (w + w ' ) ; -l y- l ] e 2 Tj x y [ (w + w ' ) 2 -W' ) 2 ] d w '
43

bRLLIANIULN MK-44
If 0 < w<l-
(2w';l-Iy-I) [2('(w+w');l- ly-1] u(2w'+l-IY-I)-u[2(w'+w)-l--I]
and the integral becomes
f ~4Trj xyw
47wjxyw
=(1-[y-I-w) sin 2ffXy[(1III)WW2j
which agrees with (18). The same procddure may be carried out for-l+IY-j < w < 1 to obtain the complete result.
E.2 THE AMBIGUITY FUNCTION FOR TIME SHIFTED LINEAR FM PULSES
From (D-1) for Ia-a 0 < O.2/BT
X FM (at,) - e 2uiaa0) 0 x FM (a0t)
since the carrier of x FM is fo . On the other hand, by the definition
of x FM9 (9)
FM(%t t 0) eL~oN [a k(o-+ )f 0iFMX k) FM 0t

SACLANTCEN SR-44
aaja-a 0 fprovided that (a t+-- f T/) (a t;T/2) and e~ r
a0 0;/2
is negligible. The former Will be true if laBa0 f T <<T and the
latter will be true if (a 0) f' T ff << 77 these two conditions and
0
the other above will be satisfied if (20) of the main text is satisfied.
Comparison of the two results above yields
a-a0 f'-27rj a 0k 0a-a
X FM (at) e X FM (aot + a 2f 0) .(Eq. E.3)
000
DFM(a )l/a) =- XFM (t-T-tT F(at -tT) dt .(Eq. EA4)
fO FM*Lt-T- a-d-~~~ ~ A Ma T FM(at) d
Substitution of Eq. E.3 into Eq. E.4 yields
a-a0 f 2
0Da aiY(aT,1/a) e 0 f X(t-T a x [FMaO(t+-- f )Jdt
ak0
a-a0 f2 0
e-27rj a 0 ~ 0k0 f (t-T a 0f- - t x (t)d-0 FM a2k 0 a T) XFMat)d
I *~ 0
after a change of dummy variable. This result in turn yields (19) on
comparison with the equation for D M(a~t, 1/a0) found by setting
44

SACLANTCEN SR-44
APPENDIX F
DERIVATION OF THE BISTATIC DOPPLER SPREADING FUNCTION OF
A MOVING, TURNING LINE TARGET
The derivation takes place in three parts: First the spreading functionsto and from a point target with constant range rate are determined. Nextusing these results and trigonometry the spreading function of a point withunit reflectivity on a moving, turning line target is found. Finally thesepoints are summed weighted by appropriate reflectivity to obtain the overallspreading function.
F.l THE SPREADING FUNCTION TO AND FROM A POINT WITH CONSTANT RANGE RATE
Consider a point whose range p is given by
p(t) = PT + PT t,
then for transmission to the point
PT PTYOt) = Y(t c t)
Consider also the spreading function
I DS 1(-1, O; ,1 ) 'O 6(T --r ) (a-0t
From (2b)YO(t) =Y[t-cIT1 + (cz-l)t] (Eq. F.I)
Comparison of the two equations relating yo and yl shows that
S~P(Tt;PT)pT) 6 (T-TTP)6 (a-aTP) , (Eq. F.2)
jwherei l T/ PT PT
A -TP P-P 'c T TP.,c-;T c
is the Doppler Spreading function of transmission to a moving point target.
47Pw" IG pA" mANK-NoT n.

SACLANTCEN SR-44
Clearly for reception from the point (with PT and PT replaced by
PR and R)
Yo(t,+ R y1(t')
pR+PRt'
Replacing t' by t = t' + yieldsC
YOM Y~f - ( + - -[(I + c ) - 1] t
Comparison of this result with F.1 shows that the spreading functionis
SPR(%T, ;pR,PR) =6(T-TpR)6(a-aPR) , (Eq. F.3)
~where
"PR c c 'PR PR
F.2 THE SPREADING FUNCTION TO A POINT ON A MOVING, TURNING TARGET
Application of the law of cosines to Fig. 9 yields
p2 = r2 + 02 -2 rT a cos a,
R + r 2 - 2 rR a cos(a-y)
But o << rT and rR (on the order of 102m compared with on the order
of 104m to 105m); therefore
O O 2
PT rT 1-2 cos a + L rT cosaT T r T r 2T
PR rR - acos(t-Y) ' (Eq. F.4)
Differentiation of these results yields
T. = rT + a sinct ,
PR = rR + a sin(a -y)(a-y) , (Eq. F.5)
48

St?,C:ANTCEN SR-44
where from Fig. 9
rT = -(v cosa + vT Cos *T)
rR = - [v cos(a-y) + vR cos
Now consider the doppler spreading function SP(Tcx;a) of a point
at location a on the target assumed to have unity reflectivity.
If the point is assumed to have ranges PT + Pt and + PRt from
the transmitter and receiver respectively Fig. 3 may be used to obtainSP ; therefore AtT , which is the time of arrival of the signal at
the target, must be selected sufficiently small in magnitude that theseassumptions are valid.
Use of the fundamental relationship given by Fig. 3 and (5b) on Eqs. F.2and F.3 yields
D ~00 00
S (a,T;G) = f 6( ,'-c'Tp)6(a'(T-T')-TTP)6(a'-czpR)6(T'-TpR)da'dT'-000
= 6( aR -TpO 8[PR(T-TPR)- TTp]
TTP)= [ -p( ) [ -pa ] ,=6(c -cPR TP)6(T-TpR -)
since a6(at) = 6(t).
It is convenient to approximate ap(a) and Tp(a). From (F.2) and
(F.3)
ap(Q) 0- )/(1 )
Since T and R "< c (two orders of magnitude at least)
ap(a) 1 + R /c
-I - + 'R + a [sina & + sin(a-y)(&--)]} /c
1 -( + 6 a)/c , (Eq. F.6)
49

SACLANTCEN SR-44
from (F.5) and (23). Also from (F.2) and (F.3)
( PT + PR
0- C C
P(CFc CC-C"
___T_ + R _ OT+PR apa- 0TpCxo)c c c p) c
rT+rR- [cos + cos (ct-y)] cp(a)-l rT + 'T'-l a= ~F+ t~ T. O5c Cpa c p~a) Cos
from (F.4). But
p (o )-l 1 +
t p(a) c
Since a is small compared to rT the higher order terms in this
expansion may be neglected in the third term of T(a) to yield with theaid of (23)
,a p(r)-I1
Tp(O) [(-6ao)/c] - (rT/C) p--c + a6a/c ,
F.3 THE OVERALL SPREADING FUNCTION
Now let the reflectivity of each point a be f(a); then from linearitythe spreading function of the target is
S (T,a) = f f(a) Sp(T,a; a) do
This integration must be performed for two different cases: 6 = o and
o. For =o, p(a) 1 1/c and is independent of a from (F.6);,i! hence
"! 50

SACLANTCEN SR-44
ST,O) f" f(o) 6[r-(9 + rT -)/c + (l-a)6 a/c] 6(a-l+,/c) doj -O C-x,
c ; co 6[T- (k + rT -I)/c+a]6(-l+!./c) do-(1---T5 f(1-a)6T
c -cT+2,+-Z, rT_ f( {l-1 ) 6(a-l+!/c)
(l-.-a)6T (- a) 6
which agrees with (22) since -(a-l)/t = !/(c-I) from the 6 function.For 6 o
o0+ ap(o)-IS(T,a) = f f(o) 6{T-k/c+[(l-a)6a + rT]/c}6(a-l+ c+ a do
a p (a) dT +
Sf[b-(l-a-1/c)] 6{T-- + a(-)1a
If we salve for (1-a- z-~ from the argument of the 6 function and
substitute the result into the argument of f we get
a- 1( -cT+k- a- r T rTz(~~~ ca cr
:1 Finally from the property that JaJ6(at) 6 6(t) , (22) results.
.I5
~51

SACLANTCEN SR-44
APPENDIX G
DERIVATION OF THE MATCHED FILTER OUTPUT FOR
THE BISTATIC ECHO FROM A MOVING, TURNING TARGET IN A NON-DISPERSIVE MEDIUM
Substitution of (19) and (k2) into the fundamental relationship of Fig. 2and (5b)
0'-0 f 2
D0 00 -2T e k 0 D Ot% -a0 a' 1f(f, e YFM[o(T-T'+ + 0
0
iC f-CT' +£--l rTr-a
C f(a T [ W - ° T$ (T'- - + 1 T da' T 'TT-TF - c- & -- ) dd(-)(l-a)6
where ao 1-1/c. Interchanging the order of integration, making a
dummy variable change from T' to T' k + -t'-I ' and reversing the
order of integration again yields
a '-a f 2
c a CO .- - ) D . +a'-1I TD TT-,I, f e 0 Y- c-T'
(l-a) -- 0 (
+ k ) /S] f(-aL)At + ' o d /s dT'
c- 0 f( - )T
I f0~~FM 0 1-a T0la~2 k
53
NGEl14 PaGi3 BIANXK-NOT 72

SACLANTCEN SR-44
But, as pointed out in the main text, AtT must be small; therefore theapproximation
I _ 1 _ _T'
+ 0 (l-a)al
may be used. If it is used and the dummy variable T' replaced by AT'where
fA = 1 (AtT + k)
(1-a)a'2
the result is
) A(l-a)6 - F 0 a
f2e-j S' 0 f( -ct ) dT'
A(l-a)a0 k A(l-a)6
It is convenient rewrite the last result in terms of a delayed convolution
cD( T, 1) >. ( T - Td)
3d)
1 (t) f g(T - T') h(T') dT',
where Td is given in Eq. 26 (recall ao =1- /c) and
f2
-2irJ at 02c e A(l-a)a0 k f( -CT
A(l-a)6 A(l-a)6
I54
4 54

SACLANTCEN SR-44
frmE.1. ore rasomnTl()yed
F(M) = TIM [ao (T a-,0~0
,Tr J (a O --) f (T - 0 - )e 2 0 a 0y M (Tr,ao
from Eq. 12. Fourier transforming ('r) yields
~(Y) = 37 [M()]
= B rM (f -f', ao) H(f)
FM ,
where r M(f,a) and fV are defined in Eq. 26 and
H(f) _ [h(T)
ct-i f2T f, 0 k0~B =e2J TO
But if YM(f) and HM(f) are defined by
Y (f) =B Y M (f _f-o)
H(f) = M (f - fo)
then clearly Y M (f) obeys the equation given for it in Eq. 26;furthermore inverse Fourier transformation nf Y(f) yields
Ot-I f2Trj f' ( - M _ )
or
or 2j f' (T- 0 _)
0rr f~ -Td-~- a~ M3p(T,l) e 0 (T .Td),
which agrees with Eq. 25 if T is as given in Eq. 26.
55

SACLANTCEN SR-44
*To obtain H M(f) it is necessary to Fourier transform h(T). Note thatfrom Eq. 26
-~ 7rJ- ff
I[e 0 f (-T)] F(c a k
therefore
H~ ) = A(1-a)6 6 a f
H~f) = F[C f+ca k0
= F(6{[1 - a L -(At + ]f+LCa2 To00
from the definition of A. Frequency shifting this result gives the
Iequation for HM fM given in Eq. 26.
56



![ASW TrAining - · PDF file• Sonar Op. room [SonSim] ... ASW TrAining ANTI SUBMARINE TACTICAL TEAM TRAINER ASW MPA P3-C cubicle in action](https://img.pdfslide.us/doc/110x75/5a9edcb47f8b9a7f178bf691/asw-training-sonar-op-room-sonsim-asw-training-anti-submarine-tactical.jpg)