Embed Size (px)
Citation preview

1
vhtstp�kcah
yhhsboa
JSO
J
Downloaded Fr
Domenico Di DomenicoInstitut Français du Pétrole (IFP),
IFP Energies Nouvelles,Rond-Point de l’échangeur de Solaize,
B.P. 3,69360 Solaize, Lyon, France
e-mail: [email protected]
Anna StefanopoulouDepartment of Mechanical Engineering,
University of Michigan,Ann Arbor, MI 48109-2121
e-mail: [email protected]
Giovanni FiengoDipartimento di Ingegneria,
Università degli Studi del Sannio,Piazza Roma 21,
82100 Benevento, Italye-mail: [email protected]
Lithium-Ion Battery State ofCharge and Critical SurfaceCharge Estimation Using anElectrochemical Model-BasedExtended Kalman FilterThis paper presents a numerical calculation of the evolution of the spatially resolvedsolid concentration in the two electrodes of a lithium-ion cell. The microscopic solidconcentration is driven by the macroscopic Butler–Volmer current density distribution,which is consequently driven by the applied current through the boundary conditions. Theresulting, mostly causal, implementation of the algebraic differential equations that de-scribe the battery electrochemical principles, even after assuming fixed electrolyte con-centration, is of high order and complexity and is denoted as the full order model. Thefull order model is compared with the results in the works of Smith and Wang (2006,“Solid-State Diffusion Limitations on Pulse Operation of a Lithium-Ion Cell for HybridElectric Vehicles,” J. Power Sources, 161, pp. 628–639) and Wang et al. (2007 “Controloriented 1D Electrochemical Model of Lithium Ion Battery,” Energy Convers. Manage.,48, pp. 2565–2578) and creates our baseline model, which will be further simplified forcharge estimation. We then propose a low order extended Kalman filter for the estimationof the average-electrode charge similarly to the single-particle charge estimation in thework of White and Santhanagopalan (2006, “Online Estimation of the State of Charge ofa Lithium Ion Cell,” J. Power Sources, 161, pp. 1346–1355) with the following twosubstantial enhancements. First, we estimate the average-electrode, or single-particle,solid-electrolyte surface concentration, called critical surface charge in addition to themore traditional bulk concentration called state of charge. Moreover, we avoid theweakly observable conditions associated with estimating both electrode concentrationsby recognizing that the measured cell voltage depends on the difference, and not theabsolute value, of the two electrode open circuit voltages. The estimation results of thereduced, single, averaged electrode model are compared with the full order modelsimulation. �DOI: 10.1115/1.4002475�
IntroductionLithium-ion battery is the core of new plug-in hybrid electrical
ehicles �PHEV� as well as considered in many second generationybrid electric vehicles �HEV�. Micro-macroscopic battery elec-rochemical modeling is connected with the hybrid vehicle design,cale-up, optimization, and control issues of HEV where the bat-ery plays an important role in this area as high-rate transientower source. The battery models based on electrochemistry laws1,2� are generally preferred to the equivalent circuit or to otherinds of simplified models because they also predict the physicalells limitations, which have a relevant effect in the automotivepplication where the battery suffers very often the stress of veryigh transient loads �3�.
The importance of lithium-ion battery has grown in the pastears. Based on the the third lightest element, this kind of batteryas the right characteristics to be widely used in the hybrid ve-icles, thanks to its high energy density, no memory effect, and alow loss of charge when not in use. As the majority of advancedattery systems, lithium-ion batteries employ porous electrodes inrder to increase the active area between electrolyte and solidctive material, facilitating the electrochemical reactions �3–6�.
Contributed by the Dynamic Systems Division of ASME for publication in theOURNAL OF DYNAMIC SYSTEMS, MEASUREMENT, AND CONTROL. Manuscript receivedeptember 29, 2008; final manuscript received March 22, 2010; published online
ctober 29, 2010. Assoc. Editor: Loucas Louca.ournal of Dynamic Systems, Measurement, and ControlCopyright © 20
om: http://dynamicsystems.asmedigitalcollection.asme.org/ on 02/17/2016
Literature on electrochemical modeling of batteries is quite ex-tensive, including both full order and simplified models. A firstelectrochemical approach to porous electrodes modeling for bat-tery applications was presented by Newman and Tiedemann inRef. �7�. In the porous electrode theory �7�, the electrode is treatedas a superposition of two continua, namely, the electrolytic solu-tion and the solid matrix. The solid matrix is modeled as micro-scopic spherical particles where the lithium ions diffuse and reacton the spheres surface. This approach was later expanded to twocomposite electrodes and a separator by Fuller et al. in �8�. Basedon this model, Ramadass et al. in �9� accounted for the decay incapacity of the cell while Sikha et al. in �10� included the changein the porosity of the electrode material as a function of time usinga pseudo-two-dimensional approach. Unfortunately, due to the ir-regular morphology, the electrode porosity increases the modelcomplexity. Thus, a macroscopic description of the cell is needed.A micro-macroscopic coupled model meeting this requirementwith microscopic and interfacial phenomena, as described in theporous electrode theory, rigorously and systematically integratedinto a macroscopic battery model was introduced by Wang et al. in�11�. It incorporates solid-state physics and interface chemistryand can be adapted to a wide range of active materials and elec-trolyte solutions. Presented at the beginning for Ni-MH batteries�12�, it was quickly expanded to lithium-ion batteries in �3,13�where the thermal behavior was also described. The full orderelectrochemical models predict the profile of solid concentration,
i.e., lithium concentration in the solid phase across the electrode,NOVEMBER 2010, Vol. 132 / 061302-110 by ASME
Terms of Use: http://www.asme.org/about-asme/terms-of-use

dtmpo��
afopmoa�
eivbedc
aefitretemsic�ro
2
sa
tam
sc�cFowteeia
p
n
0
Downloaded Fr
uring charge and discharge, but it is difficult to apply to a real-ime on-board vehicle estimator due to the complexity of the
odel. As a consequence several approximations between the in-ut and output of the dynamical system and the battery input andutput are introduced to reduce the system order and complexity4,14� and to allow the estimation of the battery state of chargeSOC�.
The SOC estimation and regulation is one of the most importantnd challenging tasks for hybrid and electrical vehicle control. Inact, when the batteries operate in a relative limited range of statef charge, high efficiency, slow aging, and no damaging are ex-ected. Several techniques have been proposed for the SOC esti-ation, such as equivalent circuit model-based algorithms �15,16�
r black-box methods �as an example using fuzzy-logic �17��. Theccuracy reached by these SOC estimations is approximately 2%18�.
Recently, the effort to use electrochemical models in order tostimate the internal state of the battery has been intensified. Start-ng from the model introduced by Wang in �19� a low order stateariable model practical for real-time estimation and control haseen obtained. In �20�, based on a simplified representation of thelectrode introduced by Haran et al. in �21�, a Kalman filter wasesigned in order to estimate an average value of the bulk solidoncentration.
In this paper, we employ an electrode-average concentrationpproximation, similar but higher order than the single-particlelectrode estimation of �20�. We then present an extended Kalmanlter for SOC, which typically relates to the bulk battery capacity
hrough integration of the current drawn, although in our work itepresents the average particle concentration of the average-lectrode. We also estimate the critical surface charge �CSC� es-imation, which is the electrode-average solid concentration at thelectrolyte interface. In the following, a general micro-acroscopic lithium-ion battery model, as it is presented in �3�, is
ummarized and a numerical solution is shown. Then, the models simplified in order to make it compatible with a feasible solidoncentration estimation. Finally, an extended Kalman filterEKF� is designed based on the averaged model. The estimationesults are compared with the high order numerical approximationf the micro-macroscopic model prediction.
Battery General FeatureA battery is composed of three parts: the two electrodes and the
eparator. Referring to a porous battery, each electrode consists ofsolid matrix inside an electrolyte solution.In particular, for a lithium-ion battery, the anode �or referring to
he battery discharge, “negative electrode”� is composed of carbonnd the cathode �or “positive electrode” during discharge� is aetal oxide.In the separator, the lithium-salt electrolyte is held in an organic
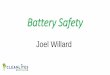
olvent such as LiPF6, LiBF4, or LiClO4, or in a solid polymeromposite such as polyethylene oxide or poly-acrylonitrilelithium-ion polymer battery�. Both the solvent and the polymeronduct the ion but they are electronic insulators. As shown inig. 1, at the negative electrode, the solid active material particlesf lithium of the LixC6 diffuse until the electrolyte-solid interfacehere the chemical reaction occurs, transferring the lithium-ion to
he solution and the electrons to the collector �3�. The producedlectrolyte material travels through the solution to the positivelectrode where, at the interface with solid material, they react andnsert into the metal oxide solid particles. The chemical reactionsre as follows: negative electrode reaction
LixC6 � C6 + x Li+ + x e−
ositive electrode reaction
Liy−xMn2O4 + x Li+ + x e− � LiyMn2O4
et reaction
61302-2 / Vol. 132, NOVEMBER 2010
om: http://dynamicsystems.asmedigitalcollection.asme.org/ on 02/17/2016
Liy−xMn2O4 + Lix C6 � LiyMn2O4 + C6
where the two ways of the reaction refer to the battery dischargereaction �right arrow� and to the battery charge reaction �left ar-row�.
The phenomena occurring at the microscale can have strongimplications for the cell discharge and charge during pulse opera-tions. However, due to the complexity of solid-electrolyte inter-face morphology, it is problematic to solve the equations on amicroscopic scale �11�. So, in order to mathematically model thebattery, both macroscopic and microscopic physics have to beconsidered. The equations describe the battery system with fourquantities, i.e., solid and electrolyte concentrations �cs ,ce� andsolid and electrolyte potentials ��s ,�e�. Table 1 summarizes thenomenclature for the model development. The complete set ofequation for the micro-macroscopic model is �3,13�
�x�eff�x�e + �x�D
eff�x ln ce = − jLi �1�
�x�eff�x�s = jLi �2�
describing the potentials distribution and
x=0
Currentcollector
Currentcollector
Negative electrode Separator Positive electrode
Solid Material
Electrolyte
Unitary Volume
r
Solid�Electrolyte interfacecs(x,r,t)
cse(x,t)
Li+
e�
e�
xx=�sp x=Lx=�ncs(x,r,t)
r
cse(x,t)
Fig. 1 Schematic macroscopic „x-direction… cell model withcoupled microscopic „r-direction… solid diffusion model. Theelectrodes nomenclature refers to the battery discharge „repro-duced from †11‡ and †12‡….
Table 1 Lithium-ion model nomenclature
Symbol Name Unit
ie Electrolyte current density A cm−2
is Solid current density A cm−2
�e Electrolyte potential V�s Solid potential Vce Electrolyte concentration mol cm−3
cs Solid concentration mol cm−3
cse Solid concentration at electrolyte interface mol cm−3
jLi Butler–Volmer current density A cm−3
�n Normalized solid concentration at anode –�p Normalized solid concentration at cathode –U Open circuit voltage VUn Anode open circuit voltage VUp Cathode open circuit voltage V� Overpotential VF Faraday’s number C mol−1
I Battery current AR Gas constant J K−1 mol−1
T Temperature K
Transactions of the ASME
Terms of Use: http://www.asme.org/about-asme/terms-of-use

d�
caissie
w
wso
at=et
wtfiiop
wptc
Ff
Tt
J
Downloaded Fr
��ece
�t= �x�De
eff�xce� +1 − t0
FjLi �3�
�cs
�t= �r�Ds�rcs� �4�
escribing the diffusion governed concentrations for the positivep� and negative �n� electrode.
In order to simplify the model, we assume a constant electrolyteoncentration ce. This simplification can also be found in Ref. �20�nd is justified due to the insignificant ��5%� variations observedn the electrolyte concentration in the detailed model �3�. Then theet of equations can be simplified by neglecting the Eq. �3� andimplifying the Eq. �1�. Furthermore, introducing the solid currents and the electrolyte current ie the second order partial differentialquations �PDE� system for the potentials can be rewritten as
ie�x� = − �eff�x�e �5�
is�x� = − �eff�x�s �6�
�xie�x� = jLi �7�
�xis�x� = − jLi �8�
ith the Butler–Volmer current density
jLi�x� = asj0�exp��aF
RT�� − exp�−
�cF
RT��� �9�
here R and F are the universal gas constant and Faraday’s con-tant, T is the absolute temperature, and � is the overpotential,btained as
� = �s − �e − U�cse� �10�
nd U is the open circuit voltage, function of the solid concentra-ion at the electrolyte interface indicated with cse�x , t�cs�x ,Rs , t�. The value of the concentration at the interface solid-lectrolyte has a particular relevance during the cell pulse opera-ions and it is called critical surface charge, defined as
CSC�t� =� − �0%
�100% − �0%�11�
here �=cse /cs,max is the normalized solid-electrolyte concentra-ion. Its reference value, �100%, can be defined for each electrodending the concentration corresponding to a full charge battery,
.e., 100% of the state of charge. Thus, the 0% reference stoichi-metry can be derived from �100% by subtracting the battery ca-acity Q, with the appropriate conversion,
�0% = �100% −Q
� 1
AFcs,max� �12�
here , , and cs,max have appropriate values for negative andositive electrode. The open circuit voltage for the negative elec-rode, denoted with the subscript n, is calculated using the empiri-al correlation introduced in �22�
Un��n� = 8.0029 + 5.0647�n − 12.578�n0.5 − 8.6322 � 10−4�n
−1
+ 2.1765 � 10−5�n3/2 − 0.46016 exp�15.0�0.06 − �n��
− 0.55364 exp�− 2.4326��n − 0.92�� �13�
or the positive electrode, denoted with p, the result obtainedrom �3� has been adopted
Up��p� = 85.681�p6 − 357.70�p
5 + 613.89�p4 − 555.65�p
3 + 281.06�p2
− 76.648�p + 13.1983 − 0.30987 exp�5.657�p115� �14�
he normalized solid-electrolyte at the negative and positive elec-
rodes are here indicated with �n and �p, respectively. The coeffi-ournal of Dynamic Systems, Measurement, and Control
om: http://dynamicsystems.asmedigitalcollection.asme.org/ on 02/17/2016
cient j0 in �9� also exhibits a modest dependence on the solid andelectrolyte concentrations, according to
j0 = �ce��a�cs,max − cse��a�cse��c �15�Finally, the cell potential, which is typically measured is com-
puted as
V = �s�x = L� − �s�x = 0� − RfI �16�
where Rf is the film resistance on the electrodes surface. In Fig. 2,the model equations and their boundary conditions for thex-domain and r-domain are shown. Note that the temperature spa-tial and temporal gradients are neglected in this work.
For completeness the battery model parameters are summarizedin Table 2 and more details on the model and its parameters can befound in �3,12�.
3 Numerical SolutionIn order to solve the battery PDE model, the boundary condi-
tions are necessary. At the boundary with the current collectors ofthe negative and positive electrode, i.e., at x=0 and at x=L �seeFig. 1�, it is
ie�x = 0� = 0 �17�
ie�x = L� = 0 �18�
is�x = 0� =I
�19�
Electrodes Separator
ee
eeff
e
idxdk
dxdi
−=
=
φε
0Solid material
eeeff
sseff
Lie
Lis
idxdk
idxd
jdxdi
jdxdi
−=
−=
=
−=
φ
φσ
( )( )se
sees
cas
Li
cjjcU
RTF
RTFjaj
00
0 expexp
=−−=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛−−⎟
⎠⎞
⎜⎝⎛=
φφη
ηαηα
Nega�ve electrode Separator Posi�ve electrode
nx δ=0=x spsepnx δδδ =+= Lx =
effx
s
s
AI
x
AIi
σ
φ−=
∂∂
=
=0
)0(
sφ
eφ
0
0)(
=∂∂
=
= nx
s
ns
x
i
δ
φ
δ
sφ
eφsepene
effx
e
ne
AkI
x
AIi
n
,,
)(
φφ
φ
δ
δ
=
−=∂∂
=
=
eφ
effx
e
spe
AkI
x
AIi
sp
−=∂∂
=
=δ
φ
δ )(
eφeφ
sφ
effLx
s
s
AI
x
AILi
σ
φ−=
∂∂
=
=
)(
sφ
eφ
0
0)0(
0=
∂∂
=
=x
e
e
x
i
φ
0)0( =sφ
AIdxxj
n Li =∫δ
0)(
0
0)(
=∂∂
=
= spx
s
sps
x
i
δ
φ
δ
0
0)(
=∂∂
=
=Lx
e
e
x
Li
φ
AIdxxj
LLi
sp
−=∫δ )(
sepepe ,, φφ =eff
x
e
spe
AkI
x
AIi
sep
−=∂∂
=
=δ
φ
δ )(effx
e
ne
AkI
x
AIi
n
=∂∂
=
=δ
φ
δ )(
00
=∂∂
=r
s
rc
Faj
rcD
s
Li
Rr
ss
s
−=∂∂
=
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
=∂∂
rc
rrcD
tc ss
ss 2
2
2
Fig. 2 Schematic representation of the set of equations and ofthe boundary conditions for the potentials and solid concentra-tion. The current I is assumed to be positive „battery discharge…and provide boundary condition „boxes with dotted line… andthe nonlocal constraints „boxes with solid line… governing theButler–Volmer current density.
A
NOVEMBER 2010, Vol. 132 / 061302-3
Terms of Use: http://www.asme.org/about-asme/terms-of-use

bct
t
bd
wat
w
�t
accp
P
TPAECETEE
EEESMSSAC
AE
0
Downloaded Fr
is�x = L� =I
A�20�
ecause at the collector there is no electrolyte flux, and the solidurrent, i.e., the spatial gradient of solid potential, corresponds tohe applied current density.
At x=n and at x=sp, i.e., the separator-electrode interfaces,he boundary conditions are
is�x = n� = 0 �21�
is�x = sp� = 0 �22�ecause no charge passes through the separator. Assuming a one-imensional model, the sum of Eqs. �7� and �8� gives
d�is + ie�dx
= 0 �23�
hich implies that the “total current” �is+ ie� has to be constantlong the cell. Furthermore, this constant value is known becausehe boundary conditions �17� and �19� give the constant value
is + ie =I
A�24�
hich translates, considering Eqs. �21� and �22�, to
ie�x = n� =I
A�25�
ie�x = sp� =I
A�26�
It can also be shown, integrating Eq. �7� �or, equivalently, Eq.8�� between x=0 and x=n, that the condition �24� is equivalento
0
n
jLi�x��dx� =I
A�27�
s expected because the total current generated by the microscopichemical reactions is the integral along the cell of the microscopicurrent density flux. The same condition can be found for the
Table 2 Bat
arameter Negative
hickness �cm� n=50article radius Rs �cm� 1�ctive material volume fraction s 0.lectrolyte phase volume fraction �porosity� e 0.onductivity of solid active material � ��−1 cm−1�ffective conductivity of solid active material �eff
ransference number t+0 0.
lectrolyte phase ionic conductivity � ��−1 cm−1� �=0.0158ce
ffective electrolyte phase ionic conductivity �eff=
ffective electrolyte phase diffusion conductivity�D
eff =2RT
Flectrolyte phase diffusion coefficient De �cm2 s−1� 2.6�
ffective electrolyte phase diffusion coefficient Deeff= �
olid phase diffusion coefficient Ds �cm2 s−1� 2.0�aximum solid-phase concentration cs,max �mol cm−3� 16.1
toichiometry at 0% �0% 0toichiometry at 100% �100% 0.verage electrolyte concentration ce �mol cm−3� 1.2�hange transfers coefficients �a , �c 0.5
ctive surface area per electrode unit volume as �cm−1�asn
lectrode plate area A �cm2� 10
ositive electrode
61302-4 / Vol. 132, NOVEMBER 2010
om: http://dynamicsystems.asmedigitalcollection.asme.org/ on 02/17/2016
sp
L
jLi�x��dx� = −I
A�28�
By the way, the Eqs. �5�–�8� are two second order PDEs with twosets of boundary conditions defining the slopes at the boundary.Hence, the distribution shape of the potentials can be found butnot its absolute value. To provide the complete solution for �e�0�x�n� and �s�0�x�n�, we first assume �s�x=0�=0 and thenwe find �e�x=0� by using the constrain given in the �27�. Simi-larly, to find the potentials �e�sp�x�L� and �s�sp�x�L�, weapply the corresponding constrain for the positive electrode, i.e.,Eq. �28�.
Regarding the solid active material, the boundary conditionsconnect the concentration with the chemistry of the reactionsthrough the surface microscopic current density. So the boundarycondition at r=0 is
�cs�x,t��r
r=0
= 0 ∀ x �29�
and at r=Rs, the boundary conditions are
Ds �cs�x,t��r
r=Rs
= −jLi�x,t�asp
F�30�
for positive electrode’s particles
Ds �cs�x,t��r
r=Rs
= −jLi�x,t�asn
F�31�
for negative electrode’s particles.Finally, in Fig. 2, the complete set of equations is provided and
a graphical representation of the boundary conditions forx-domain and r-domain is shown.
The lithium-ion PDE system with its initial and boundary con-ditions was simulated and numerically solved in the MATLAB/
SIMULINK environment by using the finite difference method. Toreproduce the spatial dependence of the model variables, the cur-rents �is and ie�, the potential ��s and �e� and the Butler–Volmercurrent jLi were spatially discretized and the differential Eqs.�5�–�8�, with the Eq. �9�, were solved using the finite difference
parameters
ctrode Separator Positive electrode
10−4 sep=25.4�10−4 p=36.4�10−4
4 – 1�10−4
– 0.5000.5 0.330– 0.1
� – �eff=s�0.363 0.363
�0.85ce1.4� �=0.0158ce exp�0.85ce
1.4� �=0.0158ce exp�0.85ce1.4�
1.5� �eff= �e�1.5� �eff= �e�1.5�f
�t+0 − 1� �D
eff =2RT�eff
F�t+
0 − 1� �Deff =
2RT�eff
F�t+
0 − 1�−6 2.6�10−6 2.6�10−6
1.5De Deeff= �e�1.5De De
eff= �e�1.5De−12 – 3.7�10−12
0−3 – 23.9�10−3
– 0.936– 0.442
−3 1.2�10−3 1.2�10−3
– 0.5, 0.5
e
s –asp
=3e
Rs
– 10,452
tery
ele
�10−
5803321=s
363exp
�e��ef
10e�10
�1.26676
10,0.5
=3
R,452
method. Referring to the negative electrode, let Nx the number of
Transactions of the ASME
Terms of Use: http://www.asme.org/about-asme/terms-of-use

dat
w
�tt�
eotM
on�
coi
di�lctzurpdBi
BwsS
wbc
J
Downloaded Fr
iscretization steps. The algebraic variables, depending on time,re �sl
�t�, �el�t�, isl
�t�, iel�t�, and jl
Li�t�, and the algebraic system,o be solved each simulation step, is
isl= isl−1
− jl−1Li � x
iel= iel−1
+ jl−1Li � x
�sl= �sl−1
−1
�eff isl−1 x
�el= �el−1
−1
keff iel−1 x
�l = �sl− �el
− U�cse�
jlLi = asj0�cse��exp��aF
RT�l� − exp�−
�cF
RT�l�� �32�
ith l=1, . . . ,Nx and x=n / �Nx−1�.Critical are the boundary condition at l=1. Equations �17� and
19� give an initial input to recursively solve Eq. �32� with respecto currents is and ie, but to solve the whole system the values ofhe potentials at x=0 are needed. As discussed above, we fix
s�x=0�=0.With this assumption, the problem is how to find the correct
lectrolyte potential value at the collector, i.e., �e�x=0�, satisfyingne of the equivalent conditions �21� and �25� or �27�. The solu-ion has been obtained by numerically minimizing �iS�n�� via a
ATLAB/SIMULINK optimization tool. Note that if the dependencef the Butler–Volmer current on the solid concentration is noteglected, the model needs the optimization of the parametere�x=0� at each simulation step.The input of the algebraic recursive system �32� is the battery
urrent I while the solid concentration can be considered as a setf parameters that, as we are going to show, can be derived start-ng from the Butler–Volmer current.
The dependence of the solid concentration cs�r ,x , t� on x can beescribed by applying the same discretization procedure that turnsnto csl
�r , t�, with l=1, . . . ,Nx. For each l, the partial differential4� governs the r-dependent csl
behavior. For a state-space formu-ation of the solid concentration diffusion equations, let the batteryurrent I be the model input, which governs the boundary condi-ions of �5�–�8� as shown in Fig. 2. For each x-dimension discreti-ation step, an ordinary differential equation �ODE� is obtained bysing the finite difference method for the r variable �23�. Thisesults in 2Nx different systems �Nx for the negative and Nx for theositive electrode�, each of �Mr−1�-order, driven by a time-ependent nonlinear function of the battery input I through theutler–Volmer current. Making explicit the r-derivative in �4�, it
s
�cs
�t= Ds� �2cs
�r2 +2
r
�cs
�r� �33�
y dividing the solid material sphere radius in Mr−1 intervals,ith Mr large enough, of size r=Rs / �Mr−1�, the first and the
econd derivative can be approximated with the finite difference.o the partial differential equation becomes
dcsq
dt= Ds� 1
r2 �cs�q+1�
+ cs�q−1�� −
2
r2csq
+1
r
1
rq�cs�q+1�
− cs�q−1����34�
ith q=1, . . . ,Mr−1 and rq=q r. The boundary conditions cane rewritten linearly, approximating the dependence of cs on r at
enter,ournal of Dynamic Systems, Measurement, and Control
om: http://dynamicsystems.asmedigitalcollection.asme.org/ on 02/17/2016
cs0= cs1
csMr= cs�Mr−1�
− r
jlLi
FasDs�35�
The discretized PDE system at the l location along thex-dimension forms the l-state cs= �cs1
,cs2, . . . ,csMr−1
�T showing ex-
plicitly the dependency on the Butler–Volmer current jlLi,
csq= �q + 1
q��1csq+1
− 2�1csq+ �q − 1
q��1csq−1
csMr−1= �Mr − 2
Mr − 1��1csMr−2
− �Mr − 2
Mr − 1��1csMr−1
− � Mr
Mr − 1��2jl
Li
�36�
with q=1, . . . ,Mr−2, l=1, . . . ,Nx, �1=Ds / r2, �2=1 /Fas r, and
jlLi�cse , I�=Ul�cse , I�, where the dependence on the input I of the
Butler–Volmer current, through the �32�, is explicitly highlighted.It follows
cs = Acs + bUl �37�
where A and b can be determined from �36� and the Ul can beconsidered as a set of Nx parameters, each of them appearing inone of the respective Nx state-space systems and has to be derivedfrom �5�–�8�. The output of the system is the value of the solidconcentration on the sphere radius that can be rewritten as
cse = csMr−1−
�2
�1Ul�cs,I� �38�
These equations show that solid concentrations and potentialsare related through the Butler–Volmer equation through theboundary condition. Furthermore, along each electrode, as theboundary condition, i.e., the input Ul, depends on x the systemoutput cse is also function of x.
For the positive electrode the same procedure was applied. Alsoin that case, one needs to fix the boundary conditions at the col-lector, so the optimization tool was used to find the value of �s�L�that satisfies the condition on the solid current at x=L. On thecontrary, at the separator, the discretization can be avoided and theanalytical solutions can be obtained. For n�x�sp, the currentof the solid material is zero; hence, the electrolyte current has tobe
ie =I
A�39�
to satisfy the Eq. �24�. Thus, using Eqs. �25� and �26�, it is
�e�x� = �e�n� −I
Akeffx �40�
Equations �39� and �40� were used in the simulation.
4 Simulation of Full Order ModelIt is difficult to validate the micro-macroscopic battery model;
hence, we repeat the test presented in �3� where the model wasvalidated with a current profile according to FreedomCAR testprocedure, an U.S. Department of Energy program for the zero-emission vehicle and technology research, as reported in �24�. Thetest procedures, shown in the top plot of Fig. 3, consist of a 30 Abattery discharge for 18 s, an open circuit relaxation for 32 s, anda 22.5 A charge for 10 s followed by open circuit relaxation.Figure 3 is inspired by �3� and tried to reproduce the numericalsolution used to validate the model. In �3�, the battery voltageprediction for several battery SOC initial conditions is shown. The
initial SOC can be related with the initial conditions on the solidNOVEMBER 2010, Vol. 132 / 061302-5
Terms of Use: http://www.asme.org/about-asme/terms-of-use

c=b
Tmv
cd
scta−pp
tet
Fi
Fttd
0
Downloaded Fr
oncentration by introducing the stoichiometry ratio �bcsb /cs,max, where csb is the average bulk concentration that cane obtained as
csb =3
R30
Rs
r2cs�r,t�dr �41�
hen, the state of charge of the battery is, with a good approxi-ation, linearly varying with �b between the two stoichiometry
alues �0% and �100%
SOC�t� =�b − �0%
�100% − �0%�42�
We here assume, according to �3�, a single cell with a nominalapacity Q=6 A h, and, for simplicity, we set uniform initial con-itions on the solid concentration.
Figures 4 and 5 show the solid and electrolyte potential and theolid material concentration during the battery discharge andharge. The figures refer to the 50% SOC line in Fig. 3. In detail,he discharge refers to a battery current I=30 A after 2 s �i.e.,fter 4 s of whole test� and the charge refers to a current I=25 A after 3 s �i.e., after 55 s of the whole test�. Note that theotential profiles during the discharge agree with the slope im-osed by the boundary conditions.
Figures 4 and 5 point out that the solid concentration is a func-ion of the position along the electrodes. The critical values forlectrodes depletion and saturation effects are the lowest one forhe ion-production electrode and the highest one for the ion-
0 10 20 30 40 50 60−50
0
50
Cur
rent
[A]
0 10 20 30 40 50 603.4
3.5
3.6
3.7
3.8
3.9
Time [s]
Cel
lvol
tage
[Vol
t]
30% SOC50% SOC70% SOC
ig. 3 Battery voltage prediction. SOC initial conditions usedn the model vary from 30% to 70% of the total charge.
0 10 20 30 40 50−20
−10
0x 10
−6 Negative electrode φs
x [µm]
solid
pote
ntia
l[V
olt]
75 80 85 90 95 100 105 1103.551
3.5511
3.5512
Positive electrode φs
x [µm]
solid
pote
ntia
l[V
olt]
0 20 40 60 80 100−0.143
−0.142
−0.141
−0.14
−0.139
φe
x [µm]
elec
trol
yte
pote
ntia
l[V
olt]
0 10 20 30 40 506.12
6.14
6.16x 10
−3 negative electrode solid concentration
x [µm]
c se,n
75 80 85 90 95 100 105 1100.0164
0.0165
0.0166positive electrode solid concentration
x [µm]
c se,p
ig. 4 Numerical solution during discharge referring to a bat-ery current I=30 A after 2 s „i.e., after 4 s of the FreedomCARest…. The solid concentration critical point for electrodes
epletion/saturation is highlighted with a circle.61302-6 / Vol. 132, NOVEMBER 2010
om: http://dynamicsystems.asmedigitalcollection.asme.org/ on 02/17/2016
insertion electrode. Because of the solid concentration profile dur-ing charge and discharge, as shown in Figs. 4 and 5, the criticalpoints are x=n and x=sp both during discharge and during thecharge.
5 Average ModelA model simplification can be provided neglecting the solid
concentration distribution along the electrode and considering thematerial diffusion inside a representative solid material particlefor each electrode. This approximation leads to an average valueof the solid concentration that can be related with the definition ofbattery state of charge and of critical surface concentration. Al-though this simplified model results in a heavy loss of informa-tion, it can be useful in control and estimation applications andstill maintains a small connection with the physical phenomenaand dimensions �25�.
In accordance with the average solid concentration, the spatialdependence of the Butler–Volmer current is ignored and a con-stant value jLi is considered, which satisfies the spatial integral�27�, giving for the negative electrode �and can be reproducedaccordingly in the positive electrode, considering Eq. �28��
0
n
jLi�x��dx� =I
A= jn
Lin �43�
where n is the negative electrode thickness, as shown in Fig. 1.The battery voltage �16�, using Eq. �10�, can be rewritten as
V�t� = ��L,t� − ��0,t� + ��e�L,t� − �e�0,t�� + �Up�cse�L,t��
− Un�cse�0,t��� − RfI �44�and using the average values at the negative and the positive elec-trode instead of the boundary values, the following relation isobtained:
V�t� = �p − �n + ��e,p − �e,n� + �Up�cse,p� − Un�cse,n�� − RfI
�45�Using the microscopic current average values and imposing theboundary conditions and the continuity at the interfaces, the solu-tions of Eqs. �5�–�8� are, for the negative electrode
�e�x� = �e�0� −I
2Akeffnx2 �46�
�s�x� = −I
A�eff�x −x2
2n� �47�
0 10 20 30 40 50−1
0
1
2x 10
−5 Negative electrode φs
x [µm]
Sol
idpo
tent
ial[
Vol
t]
75 80 85 90 95 100 105 1103.7206
3.7207
3.7208
Positive electrode φs
x [µm]
solid
pote
ntia
l[V
olt]
0 20 40 60 80 100−0.08
−0.0795
−0.079
−0.0785
−0.078
−0.0775
φe
x [µm]
elec
trol
yte
pote
ntia
l[V
olt]
0 10 20 30 40 507.58
7.6
7.62x 10
−3 Negative electrode solid concentration
x [µm]
c se,n
75 80 85 90 95 100 105 1100.0151
0.0152
0.0153Positive electrode solid concentration
x [µm]
c se,p
Fig. 5 Numerical solution during charge referring to a currentI=−25 A after 3 s „i.e., after 55 s of the FreedomCAR test…. Thesolid concentration critical point for electrodes depletion/saturation is highlighted with a circle.
for the separator
Transactions of the ASME
Terms of Use: http://www.asme.org/about-asme/terms-of-use

wE
ws
F
w
w
b
rtw�OOcct
mcElcedarcFF
J
Downloaded Fr
�e�x� = �e�0� −I
2Akeffn −I
Akeff�x − n� �48�
hich correspond with Eq. �40� with value of �e�n� computed byq. �46� and for the positive electrode,
�e�x� = �e�0� −I
2Akeffn −I
Akeffsep +I
2Akeffp�x − sp�2
−I
Akeff�x − sp� �49�
�s�x� = �s�L� +Ip
2�effA−
I�x − sp�2
2�effAp�50�
here sep=sp−n is the separator thickness. The approximateolutions �46� and �49� lead to
�e,p − �e,n = �e�L� − �e�0� = −I
2A� n
keff + 2sep
keff +p
keff� �51�
urthermore, considering
jnLi =
I
An= asj0�exp��aF
RT��n�� − exp�−
�cF
RT�n�� �52�
jpLi = −
I
Ap= asj0�exp��aF
RT��p�� − exp�−
�cF
RT�p�� �53�
here �n and �p can be estimated as
�n =RT
�aFln ��n + ��n
2 + 1� �54�
�p =RT
�aFln ��p + ��p
2 + 1� �55�
here
�n =jnLi
2asj0and �p =
jpLi
2asj0�56�
Finally, the battery voltage �45� can be written as a function ofattery current and of the average solid concentration,
V�t� =RT
�aFln
�n + ��n2 + 1
�p + ��p2 + 1
+ �e,p − �e,n + �Up�cse,p� − Un�cse,n��
− RfI �57�Thus, the averaging Butler–Volmer current leads to consider a
epresentative solid material particle somewhere along the nega-ive and positive electrode. This simplified model has similaritiesith the “single-particle” model introduced in Ref. �8�. In Ref.
8�, the diffusion dynamics are approximated with a first orderDE, whereas in the electrode-average model a �Mr−1�-orderDE is used. Furthermore, in the electrode-average model, the
ell voltage depends, through Un and Up, on the solid-electrolyteoncentration instead of the average single-particle bulk concen-ration.
Figures 6–10 demonstrate the performance of the reduced orderodel driven by the �Mr−1�-order ordinary differential Eq. �37�,
omparing the simulated signal with the full order model given byq. �37� resolved at Nx locations across the x-direction. In particu-
ar, Fig. 6 shows a good cell voltage prediction at different dis-harge rates from 10 A to 300 A. The depletion and saturationffects, respectively for negative and positive electrode, are evi-ent for higher discharge rate where a sudden drop of initial SOCnd cell voltage can be noticed. Note that the average voltageesponse reproduces the full order model numerical solution withomparable precision for different discharge rates and SOC levels.igure 7 show a good battery voltage prediction during a
reedomCAR test procedure with a maximum error of 0.3 mV forournal of Dynamic Systems, Measurement, and Control
om: http://dynamicsystems.asmedigitalcollection.asme.org/ on 02/17/2016
the considered charge and discharge rate. Figure 8 shows the tem-poral distribution of solid concentration, highlighting a goodagreement between the distributed value of the solid concentrationand the predicted average. Figure 9 shows the error between theaverage solid concentration and the solid concentration at theelectrodes depletion/saturation effects critical points, i.e., theelectrodes-separator interfaces, as it is predicted by the full ordermodel. Figure 10 shows the spatial distribution of electrodes solid
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.5
1
1.5
2
2.5
3
3.5
4
1−SOC
volta
ge[V
]
full orderaverage
10A
50A100A
200A
300A
Fig. 6 Voltage response of average versus full order model fordifferent constant current from 10 A to 300 A
0 10 20 30 40 50 60−50
0
50
curr
ent[
A]
0 10 20 30 40 50 603.4
3.6
3.8
volta
ge[V
]
full orderaverage
0 10 20 30 40 50 60−5
0
5x 10
−4
Time
erro
r[V
]
Fig. 7 Average versus full order model
0 10 20 30 40 50 60
0.62
0.64
0.66
0.68
0.7
0.72
0.74normalized chatode solid material concentration
solid
mat
eria
lcon
cent
ratio
n
average
0 10 20 30 40 50 60
0.35
0.4
0.45
0.5normalized anode solid material concentration
Time [s]
solid
mat
eria
lcon
cent
ratio
n
14.3 14.70.7165
0.7185
54.4 550.469
0.473
Fig. 8 Average versus full order battery model: negative andpositive electrode solid material concentration. The different
lines represent the concentration values along the x-direction.NOVEMBER 2010, Vol. 132 / 061302-7
Terms of Use: http://www.asme.org/about-asme/terms-of-use

s�etepecost
6
ktcccclfcd
Ftt
Fb„
w
0
Downloaded Fr
urface concentration at various times during a 30 A dischargeconstant for the average model� and the error introduced by av-raging the spatial distribution with the average solid concentra-ion value. Finally, Fig. 11 highlights, particularly for the negativelectrode, that the solid material depletion is deeper during theulse operations, implying an unavoidable degradation of the av-rage model performance. The predicted gradient in solid surfaceoncentration throughout the electrode here is smaller that thenes shown in �19� but as far as we know, nobody has reallyhown experimentally what the exact spatio-temporal profile ofhe Li-ion concentrations is.
Kalman Filter State of Charge EstimationIn most cases the battery voltage is measured and along the
nown input �current demanded�, one needs to estimate the bat-ery SOC and CSC. The physical quantity related to the batteryharge is the solid concentration at the electrodes. As the solidoncentration is a function of the position along the electrodes, theritical values for the state of charge estimation, able to predictorrectly the electrodes depletion and saturation effects, are theowest one for the ion-production electrode and the highest oneor the ion-insertion electrode. Unfortunately, a spatially resolvedoncentration estimation cannot be probably realized in real-timeue to the iterative process involved in the 300-state numerical
0 10 20 30 40 50 60−5
0
5
10x 10
−4 average normalized chatode solid material concentration error
erro
r
0 10 20 30 40 50 60−2
−1
0
1x 10
−3 average normalized anode solid material concentration error
Time [s]
erro
r
ig. 9 Average versus full order battery model: error betweenhe average solid concentration and the solid concentration athe electrodes-separator interface
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.3
0.4
0.5
0.6
0.7
0.8
norm
aliz
edso
lidco
ncen
trat
ion
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−1
−0.5
0
0.5
1x 10
−3
full
orde
rvs
.ave
rage
erro
r
x/L
0.7 0.8 0.9 10.726
0.727
0 0.2 0.4
0.34
0.341
0.1s1s5s
15s
ig. 10 Average versus full order battery model: spatial distri-ution of electrode solid surface concentration at various time0.1 s, 1 s, 5 s, and 15 s… during a 30 A discharge and its error
ith respect to the average model prediction61302-8 / Vol. 132, NOVEMBER 2010
om: http://dynamicsystems.asmedigitalcollection.asme.org/ on 02/17/2016
solution for the full order model. A solid concentration estimationthat predicts the critical concentration levels would have beenmore elegant. Unfortunately, the key feature of SOC estimationrelies on the Butler–Volmer current values at the electrode bor-ders. The microscopic current is not measurable, so it should bederived from the battery current by solving the PDEs �5�–�8� orthe discretized equivalent �30� and �35� 2Nx times, which is simi-larly intractable. Instead, we explore the estimation using the av-eraged model of Sec. 5.
Specifically, the average dynamical system describes the diffu-sion effects into two solid material particles, one for the positiveelectrode and one for the negative electrode and allows the com-putation of the solid concentration at the spheres radius, whichrepresents an average value of the solid concentration along theelectrodes. However the cell voltage �33� depends on �Up�cse,p�−Un�cse,n�� making the difference of the open circuit voltage ob-servable but does not necessarily guarantee the observability ofeach open circuit voltage. Indeed, the system that includes bothpositive and negative electrode concentration states is weakly ob-servable �in the linear sense� from the output cell voltage.
It is possible to find a relation between the positive and nega-tive electrode-average solid concentrations, which can be used forthe estimation of the negative electrode concentration based onthe positive electrode. As it is shown below, the positive electrodeconcentration states are observable from the output cell voltage.Then, the voltage measurement is used to compute the voltageprediction error and it is then fed back to the positive �alone�electrode concentration observer. The enabling relation for realiz-ing the negative electrode concentration as a function of the posi-tive electrode concentration can be found in the SOC definitionintroduced in Eq. �42�. In particular, we assume equal averagesolid concentration of both electrodes and allow the SOC estima-tion using a single averaged electrode solid concentration, eventhough it would have been safer to estimate SOC based on themost critical level of the solid concentration along the electrode,which can be at the electrode ends and not in the middle. Byassuming that the SOC value is equal at the two electrodes, usingEq. �42�, the negative electrode concentration can be computed asfunction of positive electrode concentration as
cse,n = cs,max,n��n0% +cse,p − �p0%cs,max,p
��p100% − �p0%�cs,max,p��n100% − �n0%��
�58�
where �n0%, �n100%, �p0%, and �p100% are the reference stoichiom-
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
x/L
norm
aliz
edso
lidco
ncen
trat
ion
0 0.1 0.2 0.3 0.40.08
0.1
0.12
0.14
0.7 0.8 0.9 10.83
0.835
0.1s0.3s0.5s
Fig. 11 Spatial distribution of electrode solid surface concen-tration during pulse operation at various time „0.1 s, 0.3 s, and0.5 s… during a 180 A discharge and its error with respect to theaverage model prediction
etry points for the negative and the positive electrode.
Transactions of the ASME
Terms of Use: http://www.asme.org/about-asme/terms-of-use

=
wrlCe
dss
�so
a
wttdl
w
a
te
FcbMi
J
Downloaded Fr
Hence, introducing the state vector x�cs,p1 , cs,p2 , . . . , cs,p�Mr−1��T, the dynamical system is
x = Apx�t� + Bpu�t� with u = jpLi and y = V�x,u� �59�
here the matrices Ap and Bp are obtained from Eq. �36� witheference to the positive electrode. For a linear state-space formu-ation, the linearized battery voltage results in an output matrix=�V /�x, which is a row matrix with zeros in its first Mr−2
lements and the last nonzero term being
�V
� cs,p�Mr−1�=
�Up
� cs,p�Mr−1�−
�Un
� cse,n
� cse,n
� cs,p�Mr−1��60�
ue to the fact that the battery potential V is only a function of theolid concentration at interface. This output matrix C leads to atrongly observable system.
The nonlinear system observability was also studied. Equation59� leads to a �Mr−1�-dimensional codistribution H of the ob-ervation space H, which imply that the system is strongly locallybservable ∀cse,p�0 �26�.
Based on the average model developed in the previous section,Kalman filter can be designed according to
x = Apx + Bu + Ke�y − y�
y = V�x,u� �61�
here x and y are the estimated state and output, respectively, V ishe output nonlinear function in Eq. �57�, Ap and Bp are the ma-rices describing the dynamical system defined in Eq. �59�, C isefined in Eq. �60�, and Ke is the Kalman gain, obtained as fol-ows
Ke = PCR−1 �62�
here P is the solution of the Riccati equation
P = ApP + PApT − PCR−1CTP + Q
P�0� = P0 �63�
nd Q and R are weight matrices appropriately tuned.Note that one of the main advantage of the filter proposed in
his paper is that the bulk and the interface solid concentration arestimated, allowing the estimation of both the CSC and the SOC.
Figures 12–17 highlight the filter performance. In particular,igs. 16 and 17 show the simulation results for some reasonablehoice of Q and R when band-limited white noise is added to theattery current and voltage in order to simulate the sensors noise.ore noisy �and less expensive sensors� will require more filter-
0 10 20 30 40 50 60 70
0.58
0.6
0.62
0.64
0.66
0.68
0.7
0.72
0.74normalized chatode solid material concentration
Time [s]
solid
mat
eria
lcon
cent
ratio
n
estimated averagefull order
15 16 17
0.718
0.72
0.722
0.724
60.95 61 61.0561.161.15
0.63
0.64
0.65
39.8 39.9
0.6747
0.6748
0.6749
61 61.1
0.646
0.648
Fig. 12 Kalman filter: solid concentration estimation
ng, which will slow down the estimation rate and future work on
ournal of Dynamic Systems, Measurement, and Control
om: http://dynamicsystems.asmedigitalcollection.asme.org/ on 02/17/2016
an experimental battery needs to address these issues. The fourhorder Kalman filter estimation results are compared with the full300th order model. The error in the initial condition, close to 10%,is fully and quickly recovered, showing that the filter is able toestimate the correct value of the battery state of charge even if its
0 10 20 30 40 50 60−4
−2
0
2
4x 10
−3 normalized chatode solid material concentration error
erro
r
0 10 20 30 40 50 60−0.04
−0.02
0
0.02normalized anode solid material concentration error
Time [s]
erro
r
Fig. 13 Kalman filter: error between the average solid concen-tration estimation and full order model prediction at theelectrolytes-separator interface. The transient in the EKF esti-mation is not shown.
0 10 20 30 40 50 60 70
0.3
0.4
0.5
0.6
0.7
0.8
0.9
time [s]
CSCSOCCC
Fig. 14 Kalman filter: CSC and SOC estimations comparedwith the coulomb counting SOC
0 10 20 30 40 50 60 703.5
3.6
3.7
3.8Cell voltage
Time [s]Cel
lvol
tage
[Vol
t]
0 10 20 30 40 50 60 700.09
0.1
0.11
0.12negative electrode open circuit voltage
Un
[Vol
t]
full orderestimation
0 10 20 30 40 50 60 703.7
3.75
3.8
3.85positive electrode open circuit voltage
Up
[Vol
t]
Fig. 15 Kalman filter: open circuit voltage estimation
NOVEMBER 2010, Vol. 132 / 061302-9
Terms of Use: http://www.asme.org/about-asme/terms-of-use

odepmsetrtfCeicCtt
vvsobs
Fn
Fa
0
Downloaded Fr
pen loop model prediction was 10% wrong. The step in currentemand results in a step in solid concentration, which is againstimated by the filter, as shown in a zoom of the same figure. Inarticular, the Fig. 13 shows explicitly the error between the esti-ated solid concentration and the solid concentration depletion/
aturations critical values, which are the interesting quantities tostimate for a refined estimation. It is shown that the error is lesshan �0.4% and �3.0% in the positive and negative electrodes,espectively. The negative electrode has higher prediction errorshan the positive electrode due to the lack of direct observabilityrom the voltage prediction error. In Fig. 14, the estimation of theSC and SOC is compared with coulomb counting �CC� thatvaluates the battery charge with the integral of battery current. Ast is shown, the CC is unable to recover the error in the initialonditions. Figure 14 also highlights that the discontinuity in theSC during the current steps, which is slowly recovered due to
he diffusion into the particle, is only partially observable throughhe SOC estimation.
Furthermore, the reduced order model-based Kalman filter pro-ides also a good estimation for the single electrode open circuitoltage even though just the open circuit voltage Up−Un is ob-ervable. This accuracy is accomplished because the measuredutput V is not very sensitive to Un, so the correct value of theattery voltage can be predicted uniquely by the positive electrodeolid concentration, as confirmed by the results shown in Fig. 15.
0 10 20 30 40 50 60 700.62
0.64
0.66
0.68
0.7
0.72
0.74
Time [s]
solid
mat
eria
lcon
cent
ratio
n
normalized chatode solid material concentration
estimated averagefull order
18.2 18.4 18.6 18.8 190.724
0.7245
0.725
0.7255
ig. 16 Kalman filter: solid concentration estimation whenoise is added to the measurements
0 10 20 30 40 50 60 70−50
0
50
Cur
rent
[A]
Battery current
0 10 20 30 40 50 60 703.5
3.55
3.6
3.65
3.7
3.75
Time [s]
Cel
lvol
tage
[Vol
t]
Cell voltage
full orderestimation
30 353.63
3.635
ig. 17 Kalman filter: cell voltage estimation when noise is
dded to the measurements61302-10 / Vol. 132, NOVEMBER 2010
om: http://dynamicsystems.asmedigitalcollection.asme.org/ on 02/17/2016
Figures 16 and 17 show that the filter performance is barelyaffected by the measurement imprecision. Introducing the sensorsnoise into the simulation, in fact, increases the estimation conver-gence time and reduce the precision. However, the performance isstill satisfying.
7 ConclusionAn isothermal numerical calculation of the solid concentration
evolution in the two electrodes of a lithium-ion battery cell drivenby a spatially distributed Butler–Volmer current was presented.The numerical solution is implemented in MATLAB/SIMULINK usingthe finite difference method. The isothermal electrochemicalmodel of the lithium-ion battery cell was then used to derive anaveraged model coupling, the average microscopic solid materialconcentration with the average values of the chemical potentials,electrolyte concentration, and current density. The full and thereduced order models were then compared and simulation resultswere shown and discussed. Finally, an EKF, based on theelectrode-average model, was designed for the CSC and SOC es-timation. Using a typical discharge followed by a charge test theestimation results show a �0.4% and �3.0% error in predictingthe critical solid concentrations in the positive and negative elec-trode, respectively.
AcknowlegdmentA.S. is supported by the NSF under Grant Nos. CMS-GOALI
0625610 and CBET-GOALI 0932509.
References�1� Doyle, M., Fuller, T. F., and Newman, J., 1993, “Modeling of Galvanostatic
Charge and Discharge of the Lithium/Polymer/Insertion Cell,” J. Electrochem.Soc., 140, pp. 1526–1533.
�2� de Vidts, P., Delgado, J., and White, R. E., 1995, “Mathematical Modeling forthe Discharge of a Metal Hydride Electrode,” J. Electrochem. Soc., 142, pp.4006–4013.
�3� Smith, K., and Wang, C. Y., 2006, “Solid-State Diffusion Limitations on PulseOperation of a Lithium-Ion Cell for Hybrid Electric Vehicles,” J. PowerSources, 161, pp. 628–639.
�4� Barbarisi, O., Vasca, F., and Glielmo, L., 2006 “State of Charge Kalman FilterEstimator for Automotive Batteries,” Control Eng. Pract., 14, pp. 267–275.
�5� Prins-Jansen, J. A., Fehribach, J. D., Hemmes, K., and de Wita, J. H. W., 1996,“A Three-Phase Homogeneous Model for Porous Electrodes in Molten-Carbonate Fuel Cells,” J. Electrochem. Soc., 143, pp. 1617–1628.
�6� Verbrugge, M. W., and Koch, B. J., 2003, “Electrochemical Analysis of Lithi-ated Graphite Anodes,” J. Electrochem. Soc., 150, pp. A374–A384.
�7� Newman, J., and Tiedemann, W., 1975, “Porous-Electrode Theory With Bat-tery Applications,” AIChE J., 21, pp. 25–41.
�8� Fuller, T. F., Doyle, M., and Newman, J., 1994, “Simulation and Optimizationof the Dual Lithium Ion Insertion Cell,” J. Electrochem. Soc., 141, pp. 1–10.
�9� Ramadass, P., Haran, B., Gomadam, P. M., White, R., and Popov, B. N., 2004,“Development of First Principles Capacity Fade Model for Li-Ion Cells,” J.Electrochem. Soc., 151, pp. A196–A203.
�10� Sikha, G., Popov, B. N., and White, R. E., 2004, “Effect of Porosity on theCapacity Fade of a Lithium-Ion Battery,” J. Electrochem. Soc., 151, pp.A1104–A1114.
�11� Wang, C. Y., Gu, W. B., and Liaw, B. Y., 1998, “Micro-Macroscopic CoupledModeling of Batteries and Fuel Cells. Part I: Model Development,” J. Electro-chem. Soc., 145, pp. 3407–3417.
�12� Wang, C. Y., Gu, W. B., and Liaw, B. Y., 1998, “Micro-Macroscopic CoupledModeling of Batteries and Fuel Cells. Part II: Application to Ni-Cd and Ni-MHCells,” J. Electrochem. Soc., 145, pp. 3418–3427.
�13� Gu, W. B., and Wang, C. Y., 2000, “Thermal and Electrochemical CoupledModeling of a Lithium-Ion Cell,” Proc.-Electrochem. Soc., 99, pp. 748–762.
�14� Paxton, B., and Newmann, J., 1997, “Modeling of Nickel Metal Hydride,” J.Electrochem. Soc., 144, pp. 3818–3831.
�15� Verbrugge, M., and Tate, E., 2004, “Adaptive State of Charge Algorithm forNickel Metal Hydride Batteries Including Hysteresis Phenomena,” J. PowerSources, 126, pp. 236–249.
�16� Hariprakasha, B., Marthaa, S. K., Jaikumara, A., and Shukla, A. K., 2004,“On-Line Monitoring of Leadacid Batteries by Galvanostatic NondestructiveTechnique,” J. Power Sources, 137, pp. 128–133.
�17� Salkind, A. J., Fennie, C., Singh, P., Atwater, T., and Reisner, D. E., 1999,“Determination of State-of-Charge and State-of-Health of Batteries by FuzzyLogic Methodology,” J. Power Sources, 80, pp. 293–300.
�18� Pop, V., Bergveld, H. J., Op het Veld, J. H. G., Regtien, P. P. L., Danilov, D.,and Notten, P. H. L., 2006, “Modeling Battery Behavior for Accurate State-of-Charge Indication,” J. Electrochem. Soc., 153, pp. A2013–A2022.
�19� Smith, K., Rahn, C. D., and Wang, C. Y., 2007, “Control oriented 1D Electro-
Transactions of the ASME
Terms of Use: http://www.asme.org/about-asme/terms-of-use

J
Downloaded Fr
chemical Model of Lithium Ion Battery,” Energy Convers. Manage., 48, pp.2565–2578.
�20� Santhanagopalan, S., and White, R. E., 2006, “Online Estimation of the Stateof Charge of a Lithium Ion Cell,” J. Power Sources, 161, pp. 1346–1355.
�21� Haran, B. S., Popov, B. N., and White, R. E., 1998, “Determination of theHydrogen Diffusion Coefficient in Metal Hydrides by Impedance Spectros-copy,” J. Power Sources, 75, pp. 56–63.
�22� Doyle, M., and Fuentes, Y., 2003, “Computer Simulations of a Lithium-IonPolymer Battery and Implications for Higher Capacity Next-Generation Bat-tery Designs,” J. Electrochem. Soc., 150, pp. A706–A713.
�23� Schiesser, W. E., 1991, The Numerical Method of Lines: Integration of Partial
ournal of Dynamic Systems, Measurement, and Control
om: http://dynamicsystems.asmedigitalcollection.asme.org/ on 02/17/2016
Differential Equations, Elsevier Science & Technology, Amsterdam, The Neth-erlands.
�24� 2003, FreedomCar Battery Test Manual for Power-Assist Hybrid Elecric Ve-hicles, DOE/ID-11069.
�25� Di Domenico, D., Fiengo, G., and Stefanopoulou, A., 2008, “Lithium-Ion Bat-tery State of Charge Estimation With a Kalman Filter Based on a Electro-chemical Model,” Proceedings of the 2008 IEEE Conference on Control Ap-plications, Vol. 1, pp. 702–707.
�26� Hermann, R., and Krener, A. J., 1977, “Nonlinear Controllability and Observ-ability,” IEEE Trans. Autom. Control, 22, pp. 728–740.
NOVEMBER 2010, Vol. 132 / 061302-11
Terms of Use: http://www.asme.org/about-asme/terms-of-use